fachgebiet rechnersysteme 6. model checking · model checking fachgebiet rechnersysteme...
TRANSCRIPT

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 1
6. Model CheckingFachgebiet RechnerSysteme
Verification Technology
Content
6.1 Temporal logic6.2 CTL6.3 Symbolic model-checking6.4 Specification of temporal properties in CTL 6.5 Non-deterministic systemsy6.6 Fairness conditions 6.7 Property specification by automata6.8 LTL and CTL
6. Model-Checking 2
What is model-checking? Checking of temporal properties of sequential circuits
Examples:p „It is never possible that all traffic lights are green“ „Eventually, each traffic light will become green“
Model
Temporalproperty
Sequentialcircuit
Model-Checker
Y
N
counter example
6. Model-Checking 3
"It is possible that a=1, b=1, c=1 and d=1 at the same time" Note: it is much easier to specify this
a
b b
+5
+5
+5
+5+1
p yproperty and do model-checking, rather than to invent input sequences that may lead to this state
c c
d d
0 1
+ + + +-1 - -
a b c d
represents allreachable states
6. Model-Checking 4
Temporal logic is used to specify temporal properties, in particular
6.1 Temporal Logic
particular Safety-conditions: "bad things (all traffic lights are
green, deadlock, ...) will never happen" Liveness-conditions: "good things will happen"
(a request will always be followed by an acknowledgement, each traffic light will finally become green, ...)

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 5
Examples: true or false? "All states can be reached from all other states" "State 11 can never be left"
6.1 Temporal logic
"Starting from initial state 00, it is inevitable that r=1 at some time in the future" The answer depends on the given
state diagram
0/0r s
00 10 11
01
1/0
0/0
0/1
1/0
1/00/0
0/0
1/0
6. Model-Checking 6
Temporal logic is a modal logic: There are different types or modes of "truth"
– Example: today: "it is Thursday" holds, tomorrow:
6.1 Temporal logic
p y y ,it does not hold Not temporally independent like 3+7 = 7+3
Fundamental research by A.Pnueli und Z.Manna in the 70's
Temporal logic can be reduced to predicate logic There are however efficient decision procedures like There are, however, efficient decision procedures like
model-checking for some types of temporal logic
6. Model-Checking 7
Several types of temporal logic (TL)– Example: Linear Temporal Logic (LTL)
considers all execution paths in a system
6.1 Temporal logic
6. Model-Checking 8
LTL Operators X "In the next state" G "Globally in all states"
6.1 Temporal logic
G Globally in all states F "Finally in some state" Reasoning about linear execution paths
– Examples:
X(p)
p p
X(p)
G(p)
F(p)
Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 9
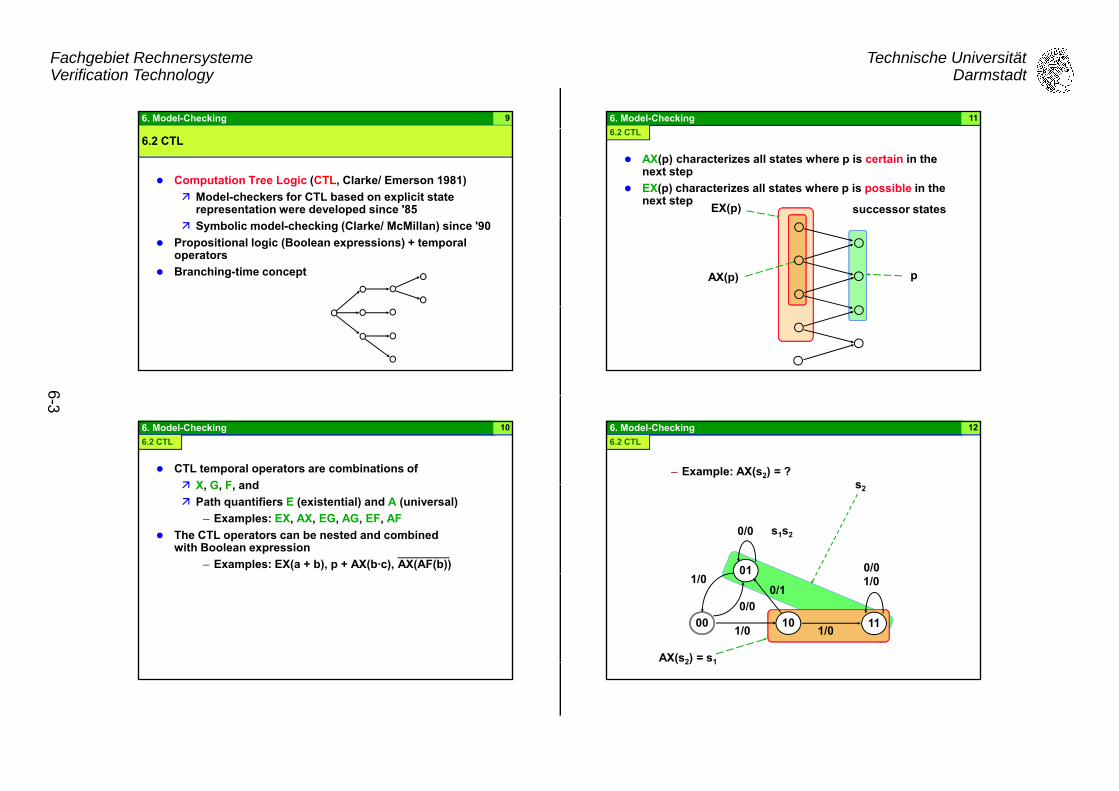
Computation Tree Logic (CTL, Clarke/ Emerson 1981) Model-checkers for CTL based on explicit state
6.2 CTL
Model-checkers for CTL based on explicit state representation were developed since '85
Symbolic model-checking (Clarke/ McMillan) since '90 Propositional logic (Boolean expressions) + temporal
operators Branching-time concept
6. Model-Checking 10
CTL temporal operators are combinations of X, G, F, and Path quantifiers E (existential) and A (universal)
6.2 CTL
q ( ) ( )– Examples: EX, AX, EG, AG, EF, AF
The CTL operators can be nested and combined with Boolean expression
– Examples: EX(a + b), p + AX(b·c), AX(AF(b))
6. Model-Checking 11
AX(p) characterizes all states where p is certain in the next step
EX(p) characterizes all states where p is possible in the t t
6.2 CTL
next step EX(p)
AX(p) p
successor states
6. Model-Checking 12
s2
– Example: AX(s2) = ?
6.2 CTL
01
0/0
0/11/00/0
1/0
s1s2
AX(s2) = s1
00 10 111/0
0/1
1/0
0/0

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 13
EF(p): p is reachable (now or later)
6.2 CTL
. . .
6. Model-Checking 14
– Example: EF(s1*s2) = ?"Characterize all states from which we can go back to the initial state"
6.2 CTL
01
0/0
0/11/00/0
0/0
1/0
s1s2
EF(s1*s2) = s1 + s2
s1*s2 00 10 111/0 1/0
6. Model-Checking 15
AF(p): p is inevitable (now or later)
6.2 CTL
. . .
6. Model-Checking 16
EG(p): p holds globally on at least one (infinite) path (now and later)
6.2 CTL
. . .

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 17
– Example: EG(s1) = ?"Characterize all states from which there exists an infinite path where s1 = 0 ?"
6.2 CTL
01
0/0
0/11/00/0
0/0
1/0
s1s2
s1
EG(s1) = s1
00 10 111/0 1/0
6. Model-Checking 18
AG(p): p holds always (now and later)
6.2 CTL
. . .
6. Model-Checking 19
A CTL formula p characterizes a set of states Quiz:
Which states are characterized by the following CTL f l
6.2 CTL
0/0 s1s2
CTL-formulas: AX(s2) = AG(s2 + s1) = EG(s1) =
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0
6. Model-Checking 20
More operators ... AU(q,p): p is unavoidable (now or later) and q holds
until p
6.2 CTL
EU(q,p): there exists at least one path where p is reachable (now or later) and q holds until p
p
q q
. . .p
p
p
p
q
q
q q
q . . .p
p

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 21
AW(q,p) (weak until): p is inevitable (now or later) and q holds until p, or q holds globally
6.2 CTL
. . .
6. Model-Checking 22
EW(q,p) (weak until): p is reachable (now or later) and q holds until p on this path, or there exists some path where q holds globally
6.2 CTL
. . .
6. Model-Checking 23
Formal definition of the syntax of CTL: A Boolean expression is a CTL formula If f and g are CTL formulas then
6.2 CTL
gf, f*g, f+g, AX(f), EX(f), AF(f), EF(f), AG(f), EG(f),AU(f, g), EU(f, g) are CTL formulas
– Example:
f + AX( AF(f) )
– Counter example:
f + AXF(f)
6. Model-Checking 24
Formal definition of the semantics of CTL The validity of a CTL formula is relative to a given transition
system
6.2 CTL
A transition system is characterized by its transition relation T,
T = (sr' r(s1, ..., sn, i1, ..., im ))
Let S be the set of states given by the set of all possible values of the vector (s1, ..., sn) of storage elements
r=1
n
1 n
– Example: for two storage elements we have S = {00, 01, 10, 11}
I and S' are defined correspondingly We introduce the notation T(S, I, S') for the transition
relation

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 25
A legal path is a sequence of states z0 , ..., zn where for each pair of states (zi, zi+1), 0 i < n, holds
I: T(zi, I, zi+1) = 1 Thi th t th t iti f t
6.2 CTL
This means that the transition from zi to zi+1 is possible ("legal") for the system defined by T for at least one input combination I
A legal path obviously consists of a sequence of legal transitions
If we talk about "paths" we always mean: If we talk about paths we always mean: "legal paths" in the following
6. Model-Checking 26
A CTL formula generally characterizes a set of states In the case of Boolean expressions, a Boolean expression
p is viewed as a characteristic function as usual
6.2 CTL
– e.g., the Boolean expression s1 characterizes the states 10 and 11 if we have two flipflops s1 and s2
We introduce the notation
T, z |= p
to denote that the CTL formula p characterizes a state z of ato denote that the CTL formula p characterizes a state z of a transition system T
A CTL formula is a "state formula" A CTL operator is a functional which maps
characteristic functions to characteristic functions
6. Model-Checking 27
A state z0 is characterized by AX(p), T,z0 |= AX(p), iff for all paths z0, z1, ... we have T,z1 |= p
A state z0 is characterized by EX(p), T,z0 |= EX(p),
6.2 CTL
iff for at least one path z0, z1, ... we have T,z1 |= p
EX(p)
z0z
AX(p) pz1
6. Model-Checking 28
A state z0 is characterized by AF(p), T,z0 |= AF(p), iff for all paths z0, z1, ... there exists some state zn, 0 n, so that T,zn |= p
t
6.2 CTL
etc.
. . .. . .

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 29
A CTL formula p holds for a transition systemT |= p
if the initial state is in the set of states characterized by p
6.2 CTL
6. Model-Checking 30
In many situations, one is interested in whether a property p holds globally for all reachable states or not
One possibility to check this is
6.2 CTL
To calculate AG(p) To check if the initial state is in AG(p)
Then, for all initializable paths, p holds globally, and thus for all reachable states
if p = 1 we do not need to calculate AG(p)
6. Model-Checking 31
Example: is s2 AX(s2) valid for all reachable states? "If s2 is zero then s2 is certainly 1 in the next state" ? To prove this, build AG(s2 AX(s2))
6.2 CTL
p , ( 2 ( 2))– AX(s2) = s1
– AG(s2 AX(s2)) = AG(s2 + s1) = s1s2
– Since the initial state 00 is not characterized by this formula the formula does not hold for the transition system
0/0
00 10 11
01
1/0
0/0
0/1
1/0
1/00/0
0/0
1/0
s1s2
6. Model-Checking 32
A CTL formula is universally valid if it is valid for all transition systems
– Examples:
6.2 CTL
)q(EF)p(EF)qp(EF),q(AG)p(AG)qp(AG
),p,1(EU)p(EF),p,1(AU)p(AF,)p(EG)p(AF
,)p(EF)p(AG,)p(EX)p(AX
++•=•
===
==
)q(EF)p(EF)qp(EF +=+

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 33
The history of model-checkers First model checker 1985 (Clarke/Emerson)
6.3 Symbolic Model Checking
First model-checker ~ 1985 (Clarke/Emerson)– Representation of states enumeratively– Limited to ~ 5,000 states
Symbolic model-checking ~ 1990 (McMillan/Clarke)– Based on transiton-functions or -relation– Sets of states are represented by means ofSets of states are represented by means of
OBDD's– "1020 states and beyond"– Breadth-first backwards traversal
6. Model-Checking 34
Computation of AX(p)
6.3 Symbolic Model Checking
AX(p) p
Successor states("new" states)
Predecessor states("old" states)
6. Model-Checking 35
Computation of AX(p)
Combinational network, transition functions i
6.3 Symbolic Model Checking
s1
s2
is1'
s2'
1
2
Input
s1
s2
Storageelements
Successor states("new" states)p(s1', s2' )
Predecessor states("old" states) + inputSubstitution:p(s1' , s2' )
6. Model-Checking 36
– Example: s1' * s2'
1 = s1*s2 + s1*i + s1*s2*i1 * 2
Transition functions:
6.3 Symbolic Model Checking
1 s1 s2 s1 i s1 s2 i
2 = s1 + i
0/0s1 s2
1 2
(s1*s2 + s1*i + s1*s2*i) * (s1 + i)
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 37
Computation of AX(p) by substitution and universal quantification
s'
6.3 Symbolic Model Checking
s1
s2
is1'
s2'
1
2
s1
s2
i: [ p(s1' 1(s1, s2 , i), s2' 2(s1, s2 , i)) ]
p
i: f(i) = f(0) + f(1)i: f(i) = f(0) * f(1)
6. Model-Checking 38
AX( )– Example: s1' * s2'
1 = s1*s2 + s1*i + s1*s2*i1 * 2
6.3 Symbolic Model Checking
1 1 2 1 1 2
2 = s1 + i
0/0s1 s2
1 2
(s1*s2 + s1*i + s1*s2*i) * (s1 + i)
= (s1*s2 + s1*0 + s1*s2*0) * (s1 + 0) *(s1*s2 + s1*1 + s1*s2*1) * (s1 + 1)
= s1*s2
i: [ (s1*s2 + s1*i + s1*s2*i) * (s1 + i) ]
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0
i: f(i) = f(0) + f(1)i: f(i) = f(0) * f(1)
6. Model-Checking 39
We have
)1()0()s(
nn
n
6.3 Symbolic Model Checking
Substitution can be reduced to existential quantification
)s()s(:s n
nn
6. Model-Checking 40
General computation of AX and EX:
6.3 Symbolic Model Checking
old (s1, ..., sn) =
old (s1, ..., sn) =
i1, ..., im s1', ..., sn ': (sr' r(s1, ..., sn, i1, ..., im ))*new (s1', ..., sn') r=1
n
i1, ..., im s1', ..., sn ': (sr' r(s1, ..., sn, i1, ..., im ))*new (s1', ..., sn') r=1
n

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 41
Efficency of symbolic model-checking is based on OBDD's
T l
6.3 Symbolic Model Checking
OBDD
Sequentialcircuit1 2
Model-Checker
Y
Temporalproperty
package+, *, ,, , ...
1, 2 ,...
N
Counter-example
6. Model-Checking 42
Computation of the other CTL operators: AF(p): p is unavoidable (now or later)
– Fixed-point calculation:
6.3 Symbolic Model Checking
pK0 := pKi+1 := Ki + AX(Ki)
until Ki = Ki+1
– p AF(p)
EF(p): p is reachable (now or later)
. . .
– Fixed-point calculation:K0 := pKi+1 := Ki + EX(Ki)
until Ki = Ki+1
– p EF(p). . .
6. Model-Checking 43
– Example: AF(s2) = ?
01
0/0
1/00/0
1/0
s1s2
6.3 Symbolic Model Checking
00 10 111/0
0/1
1/0
1/0
0/0
1/0
6. Model-Checking 44
AG(p): p holds always– Fixed-point calculation:
K0 := p
6.3 Symbolic Model Checking
0Ki+1 := Ki * AX(Ki)
until Ki = Ki+1
– AG(p) p
EG(p): p holds globally on at least one infinite path
. . .
– Fixed-point calculation:K0 := pKi+1 := Ki * EX(Ki)
until Ki = Ki+1
– EG(p) p
. . .

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 45
01
0/0
0/11/00/0
1/0
s1s2
– Example: EG(s1) = ?
6.3 Symbolic Model Checking
00 10 111/0
0/1
1/0
0/0
6. Model-Checking 46
AU(q,p): q holds until p on all paths– Fixed-point calculation:
K0 := pp
pq q
6.3 Symbolic Model Checking
0Ki+1 := Ki + q*AX(Ki)
until Ki = Ki+1
– p AU(q,p) – If p holds, q does not have to hold
EU(q,p): q holds until p on some path
. . .p
p
p
p
q
(q p) q p p– Fixed-point calculation:
K0 := pKi+1 := Ki + q*EX(Ki)
until Ki = Ki+1
– p EU(q,p)
. . .p
p
6. Model-Checking 47
Examples of specifications:
6.4 Specification of Temporal Properties in CTL
– AG(req AF(ack)): a request signal is always followed by an acknowledgement
– AG(EF(init)): the initial state init is reachable from all states
– AG(AF(p)): p holds on all infinite paths infinitely often
6. Model-Checking 48
It is often much easier to specifiy a property and let the model-checker do the work than to invent simulation stimuli to check a specific situation
E l i it ibl th t 1 b 1 1 d d 1 t
6.4 Specification of Temporal Properties in CTL
– Example: is it possible that a=1, b=1, c=1 und d=1 at the same point of time?
– EF(a*b*c*d)
+5
+5
+5
+5+1
-1 - -a b c d

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 49
The specification of general properties in terms of CTL formulas is, however, intricate in many cases
Example (typical beginner's error): "If th i i it bl i th f t " i f l t d b
6.4 Specification of Temporal Properties in CTL
"If p, then p is inevitable in the future" is formulated by
p AF(p)
This is universally valid since p AF(p) ! The model-checker says "yes" and the
designer is happy !designer is happy ! Correct:
p AX(AF(p))
6. Model-Checking 50
A further problem are CTL expressions which may be trivially valid Example AG(Req AF(Ack)):
6.4 Specification of Temporal Properties in CTL
– Intention: check if a request signal is always followed by an acknowledgement If the Req signal is never set, i.e., AG(Req)
holds, then the formula is trivially valid! More complex example:
AG(p AX(q AX(r)))– Intention: check if after p follows q and after q
follows r– The formula is trivially valid if q is never set in
the step after p was set, i.e., if AG(p AX(q)) holds
6. Model-Checking 51
Using property specification patternss. http://www.cis.ksu.edu/santos/spec-patterns/
6.4 Specification of Temporal Properties in CTL
Source: Dwyer, Avrunin, Corbett
6. Model-Checking 52
Pattern "absence"P is false :
Globally AG(P)Before R AU[P , R + AG(R)]
not P holds or R is not reachable
After Q AG(Q AG(P))After Q AG(Q AG(P))Between Q and R AG(Q AU[P , R + AG(R)]) After Q until R AG(Q EU[R , P*R])
even if R is not reachable, not P has to hold "after Q" R R R R
P P P -R R R RP P P
...
Typical application:mutual exclusion
R R R RP P P P
P P P - ...
R R R RP P P P ...
...

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 53
6. Model-Checking 54
CTL was originally defined for so-called Kripke-structures Closed systems, no inputs
6.5 Non-Deterministic Systems
y , p Non-deterministic behavior
S0,a, b
S SS1,c
S2,c, b
S3,c
6. Model-Checking 55
A number of atomic propositions, e.g., a, b, ... hold in each state (the states are labeled by these propositions) Di ti t t t h id ti l
6.5 Non-deterministic systems
Distinct states may have identical labelings
S0,a, b
S SS1,c
S2,c, b
S3,c
6. Model-Checking 56
Non-determinism is an important modeling-concept in situations where we have incomplete knowledge of the exact behavior of a systemE l
6.5 Non-deterministic systems
Examples: Qualitative models of physical systems Behaviour of concurrent programs
2nd floor 2nd
1st floor
1st
between
Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 57
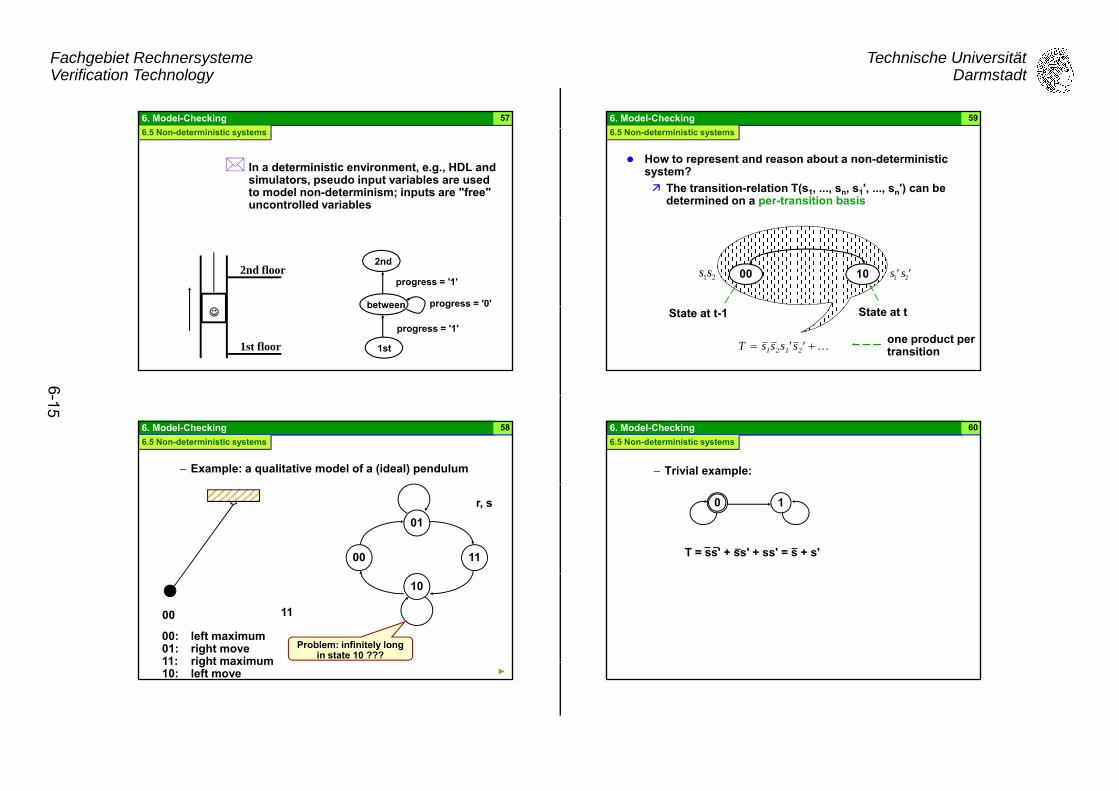
In a deterministic environment, e.g., HDL and simulators, pseudo input variables are used to model non-determinism; inputs are "free"
6.5 Non-deterministic systems
2nd floor2nd
progress = '1'
; puncontrolled variables
1st floor
1st
between
progress 1
progress = '0'
progress = '1'
6. Model-Checking 58
– Example: a qualitative model of a (ideal) pendulum
r, s
6.5 Non-deterministic systems
00 11
01
10
,
00 11
00: left maximum01: right move11: right maximum10: left move
Problem: infinitely long in state 10 ???
6. Model-Checking 59
How to represent and reason about a non-deterministic system? The transition-relation T(s1, ..., sn, s1', ..., sn') can be
d t i d t iti b i
6.5 Non-deterministic systems
determined on a per-transition basis
00 10 s s1 2 s s1 2
State at t-1 State at t
2121 ssssT one product pertransition
6. Model-Checking 60
– Trivial example:
0 1
6.5 Non-deterministic systems
T = ss' + ss' + ss' = s + s'

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 61
How to get the transition relation of
6.5 Non-deterministic systems
DeterministicSystems
Non-DeterministicSystems
0 1
Systems Systems
State-diagram
00 10 11
01
1/0
0/0
0/1
1/0
1/00/0
0/0
1/0
s1s2
State-diagram Circuit
s3
s4
s5
s2
i s1
T = ss' + ss' + ss' = s + s'
per-transition basisState-table
T = (s1' 1)*(s2' 2)*...
Determinetransition
functions i
6. Model-Checking 62
How to calculate EX, AX, etc. for a non-deterministic system with transition relation T(s1, ..., sn, s1', ..., sn')? Calculation of EX:
( )
6.5 Non-deterministic systems
old (s1, ..., sn) =
s1', ..., sn ': T(s1, ..., sn, s1', ..., sn') *new (s1', ..., sn')
Compute AX(p) as EX(p) ! etc.
6. Model-Checking 63
– Example:
0 1
6.5 Non-deterministic systems
0 1
T = ss' + ss' + ss' = s + s'
AX(s') =? EX(s'),EX(s') = s': T*s'
= s': (s + s')*s' = s': ss' + s's' = s
AX(s') = s
6. Model-Checking 64
The concept of Fairness: The speed of the transitions of the individual
6.6 Fairness Conditions
The speed of the transitions of the individual components of a concurrent system is completely undetermined
It would be unfair if, e.g., only one system were allowed to make progress
Concurrency = Non-determinism + Fairness
System A System B

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 65
Fairness is important to model arbitrary, but finite delays
6.6 Fairness conditions
2nd floor
2nd
between
1st floor 1st
It is very unfair to letthe elevator in the
between-stateinfinitely long !
6. Model-Checking 66
An infinite path is fair, if a number of fairness-conditions are satisfied infinitely often.
A state is fair if it belongs to at least one fair path.
6.6 Fairness conditions
1. Example: fairness-condition c, no state is fair
2. Example: fairness-condition c, all states are fair
c c
fair
c c
6. Model-Checking 67
Computation of fair-CTL expressions Fairness-condition c Computation of EGF (p, c)
6.6 Fairness conditions
p F (p, )
K0 := p,Ki+1 := Ki * EX(EU( Ki , Ki *c ))
(rather than EG(p) :K0 := p,Ki+1 := Ki * EX(Ki ) )
i.e., c has to be reachable within Kii+1 i ( i ) )
The fair states are characterized by EGF (1, c)
i
6. Model-Checking 68
In order to understand the meaning and calculation of EGF, we consider first the calculation of the ordinary EGin the case of an acyclic state-diagram:
6.6 Fairness conditions
K0 := p,Ki+1 := Ki * EX(Ki )
Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 69
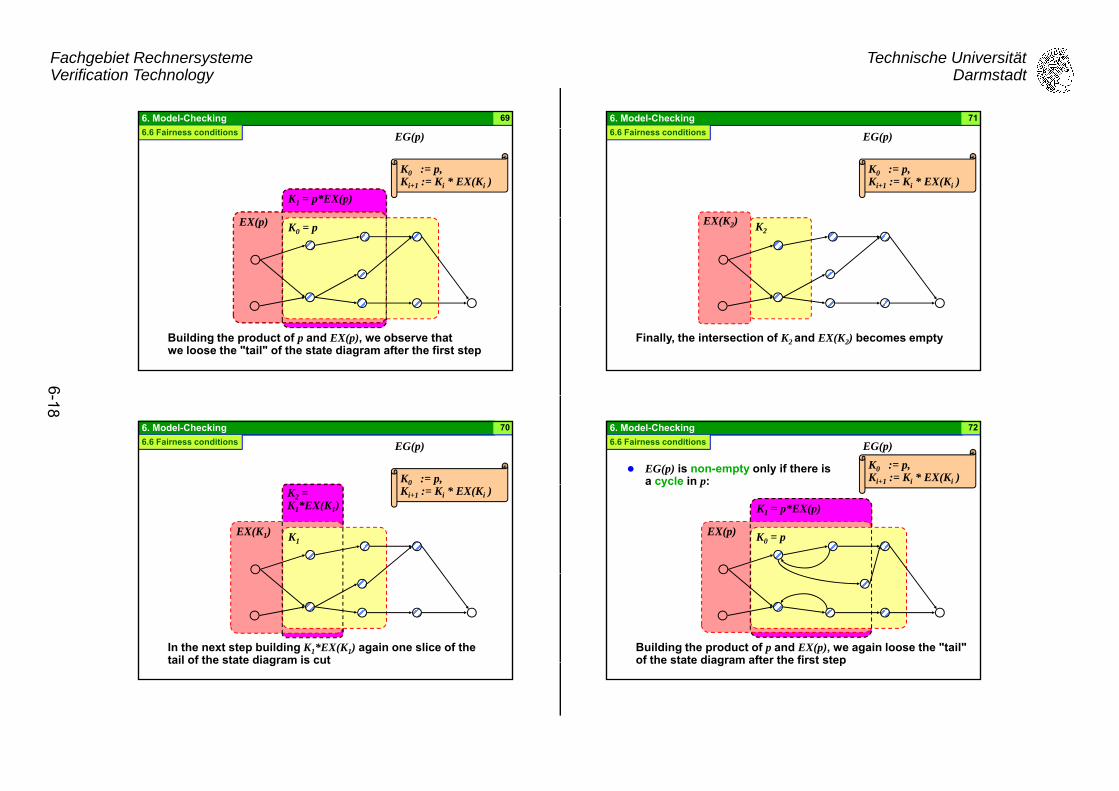
K = p*EX(p)
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
K1 = p*EX(p)
EX(p) K0 = p
Building the product of p and EX(p), we observe thatwe loose the "tail" of the state diagram after the first step
6. Model-Checking 70
K2 = K1*EX(K1)
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
K1 EX(K1)
EX(K1) K1
In the next step building K1*EX(K1) again one slice of the tail of the state diagram is cut
6. Model-Checking 71
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
EX(K2) K2
Finally, the intersection of K2 and EX(K2) becomes empty
6. Model-Checking 72
K *EX( )
EG(p) is non-empty only if there is a cycle in p:
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
K1 = p*EX(p)
EX(p) K0 = p
Building the product of p and EX(p), we again loose the "tail" of the state diagram after the first step
Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 73
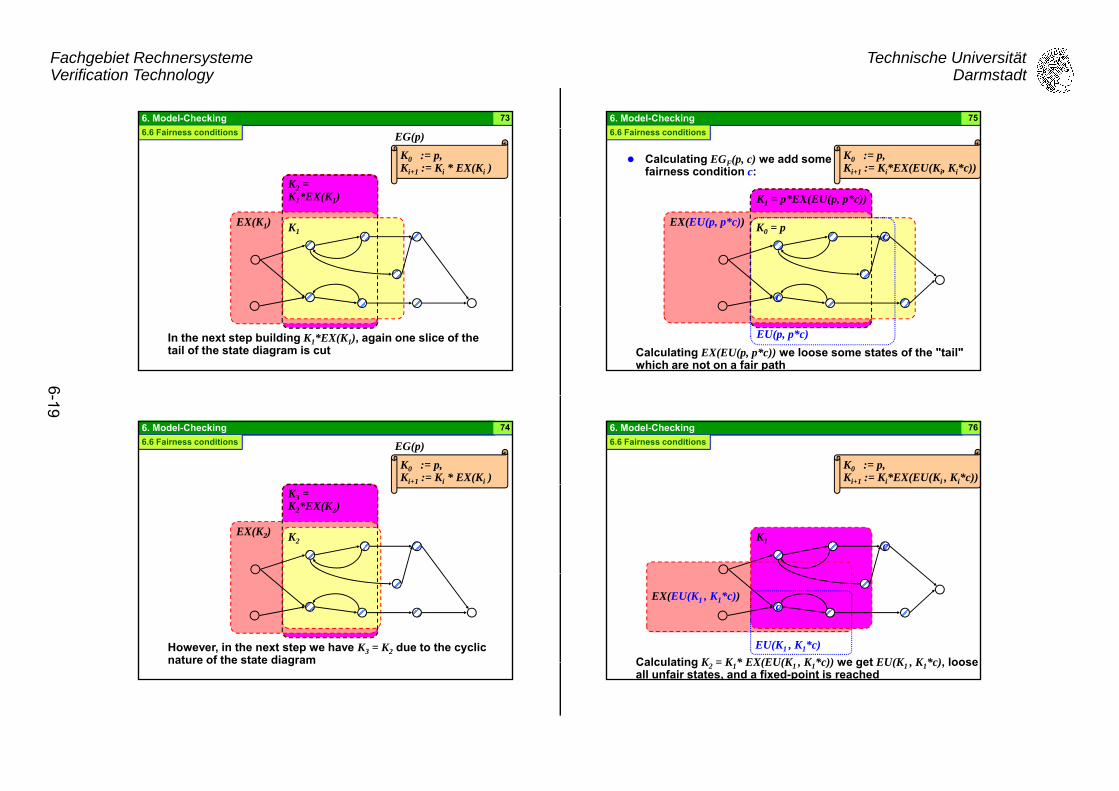
K2 = K *EX(K )
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
K1 EX(K1)
EX(K1) K1
In the next step building K1*EX(K1), again one slice of the tail of the state diagram is cut
6. Model-Checking 74
K3 = K *EX(K )
K0 := p,Ki+1 := Ki * EX(Ki )
6.6 Fairness conditions EG(p)
K2 EX(K2)
EX(K2) K2
However, in the next step we have K3 = K2 due to the cyclic nature of the state diagram
6. Model-Checking 75
K p*EX(EU(p p*c))
Calculating EGF(p, c) we add some fairness condition c:
K0 := p,Ki+1 := Ki*EX(EU(Ki, Ki*c))
6.6 Fairness conditions
K1 = p*EX(EU(p, p*c))
EX(EU(p, p*c)) K0 = pc
c
Calculating EX(EU(p, p*c)) we loose some states of the "tail" which are not on a fair path
EU(p, p*c)
6. Model-Checking 76
K0 := p,Ki+1 := Ki*EX(EU(Ki , Ki*c))
6.6 Fairness conditions
EX(EU(K K * ))
K1 c
EX(EU(K1 , K1*c))c
Calculating K2 = K1* EX(EU(K1 , K1*c)) we get EU(K1 , K1*c), loose all unfair states, and a fixed-point is reached
EU(K1 , K1*c)

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 77
1. Example: EG cF ( , )1 ),( 00 cKKEU
6.6 Fairness conditions
K 0 1
K 3 0
KK2
c c
0
K pK K EX EU K K ci i i i
0
1
: ,: ( ( , ) )
KK EX EU K K c
1
0 0 0
( ( , ))K EX EU K K c
2
1 1 1 ( ( , ))
6. Model-Checking 78
2. Example: EG cF ( , )1
6.6 Fairness conditions
K EU c1 1 ( )
c c
K EU cK K EX EU K K c
1
2 1 1 1
1
( , )( ( , ))
K pK K EX EU K K ci i i i
0
1
: ,: ( ( , ) )
6. Model-Checking 79
3. Example: pendulum
r, s
6.6 Fairness conditions
K0
00 11
01
10
c
00 11
Ki+1 := Ki * EX(EU( Ki , Ki *c ))
K1 := K0 * EX(EU(1, 1*c )) = K0
00: left maximum01: right move11: right maximum10: left move
6. Model-Checking 80
EX p c EX p EG cEF EF EG
F F( , ) ( ( , ) ),( ) ( ( ) )
11
Computation of the other fair-CTL expressions:
6.6 Fairness conditions
EF p c EF p EG cEU q p c EU q p EG c
AX p c EX p c
AF p c EG p c
AG p c EF p c
F F
F F
F F
F F
F F
( , ) ( ( , ) ),( , , ) ( , ( , ) ),
( , ) ( , ),
( , ) ( , ),
( , ) ( , ),
11
AU q p c EU p q p c EG p cF F
F F F( , , ) ( , , ) ( , )

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 81
– Example: calculation of AFF(rs, r), i.e., rs is unavoidable under fairness-condition r(in contrast, AF(rs) = rs)
6.6 Fairness conditions
0/0
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0
r s
6. Model-Checking 82
AFF(rs, r) = EGF(r + s, r)
6.6 Fairness conditions
K0 := p, Ki+1 := Ki * EX(EU( Ki , Ki *c ))
0/0
r s
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0
r s
6. Model-Checking 83
AFF(rs, r) = EGF(r + s, r)K0= r + s,K1= (r + s)*EX(EU(r + s, (r + s)*r))
= (r + s)*EX(EU(r + s sr))
6.6 Fairness conditions
0/0
= (r + s) EX(EU(r + s, sr)) = (r + s)*EX(sr) = (r + s)*r = rs,
K2= rs*EX(EU(rs, (rs)*r))= rs*EX(rs) = rs*r = rs,
AFF(rs, r) = rs = r + s K0 := p, Ki+1 := Ki * EX(EU( Ki , Ki *c ))
00 10 11
01
1/0
0/1
1/0
1/00/0
0/0
1/0
r s
6. Model-Checking 84
Basic idea: Represent a property by an "observer" (or monitor)
6.7 Property Specification by Automata
Represent a property by an observer (or monitor) automaton
The observer checks the behavior of a system and goes into a "bad" state if the property is violated
Build the product-machine of the observer and the system
Show that the "bad" state is unreachable i e Show that the bad state is unreachable, i.e., AG(bad)

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 85
Product-machine of observer and system
6.7 Property specification by automata
Observer
observed values(inputs, storage elements)
"bad" state
SystemInput Output
6. Model-Checking 86
Rationale: Designers are used to state-diagrams, but not to
temporal logic formalisms
6.7 Property specification by automata
Property verification is reduced to proving properties of type AG(bad)
This type of property can also be proven "on-the-fly" by forward reachability analysis (see Chapter 5) Particularly useful in the case of errors
6. Model-Checking 87
Example observers for property patterns:P is false :
Globally AG(P)P
P-
"bad"
6.7 Property specification by automata
Before R AU[P , R + AG(R)]P*R
R-
-
P*R R
state
R "bad" state
6. Model-Checking 88
Q -P is false:After Q
AG(Q AG(P))
P*Q
P*Q P"bad"
6.7 Property specification by automata
Pbad state

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 89
6.8 LTL and CTL
LTL Operators X "In the next state" G "Globally in all states" F "Finally in some state"
– Examples:
X(p)
G(p)
F(p)
6. Model-Checking 90
The semantics of LTL formulas is defined as path formulas
CTL formulas are state formulas
6.8 LTL and CTL
We again use the notation z0, z1, ... for a (legal) path We follow the notational convention that i denotes the i-th
suffix zi, zi+1, ... of a path z0, z1, ..., zi-1, zi, zi+1, ... A Boolean expression b characterizes a path = z0, z1, ...,
notation T, |= b, iff the state z0 is characterized by b T, |= X(p) iff the suffix is characterized by p, , | (p) y p,
i.e., T,1 |= p T, |= F(p) iff there exists some suffix i, 0 ≤ i,
so that T,i |= p T, |= G(p) iff for all suffixes i we have T,i |= p
6. Model-Checking 91
A LTL formula f holds for a transition system T, T |= f, iff f holds for all intialized paths
6.8 LTL and CTL
In LTL, we always talk about "all" paths There is no possibility to reason about
"some" path
6. Model-Checking 92
– Example:
6.8 LTL and CTL
0/0r s
00 10 11
01
1/0
0/0
0/1
1/0
1/00/0
0/0
1/0

Fachgebiet Rechnersysteme Verification Technology
Technische UniversitätDarmstadt
6. Model-Checking 93
The subtle differences between path-based and state-based formulas is illustrated by the following example
Assume that we want to express the fact that in the f ll i t t di ll th t ti f t t 00
6.8 LTL and CTL
following state-diagram on all paths starting from state 00, s=1 holds after some time forever
– If the system stays in state 01 forever, then the property is satisfied
– If the system leaves state 01 after some time, then it will get to state 11 satisfying the property as wellI f t F(G( )) h ld– In fact, F(G(s)) holds
00 01 10 11
rs
6. Model-Checking 94
If, however, we try to formalize the property as a CTL formula, e.g., AF(AG(s)), then we observe that Only state 11 is characterized by AG(s) because in
t t 01 h th h t t t t 10 h
6.8 LTL and CTL
state 01 we have the chance to go to state 10 where s=1 does not hold
Hence, only states 10 and 11 are characterized by AF(AG(s))!
00 01 10 11
rsAG(s)
6. Model-Checking 95
There is a general agreement that LTL formulas more closely represent the intuitive understanding of temporal properties than CTL formulasH d l h ki LTL f l i t ti ll
6.8 LTL and CTL
However, model-checking LTL formulas is computationally much harder than model-checking CTL
Fortunately, it turns out that in many cases the restriction of temporal formulas to a finite number of steps is sufficient Efficient algorithms exist for this subset! Finite time-windows are typical for many engineering
li ti ( th f ti i di )application (see the usage of timing-diagrams) The importance of powerful language constructs for
finite time-windows is reflected by current developments in the area of verification languages