experiments on noise characterizationroma, march 10,1999andrea viceré experiments on noise analysis...
TRANSCRIPT

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Experiments on Noise Analysis
Need of noise characterization forMonitoring the instrument behaviorProvide an estimate of the noise levelDetect deviations from the gaussianity or stationarity
Plan of the seminar: three examplesClassical spectral estimation, based on multi-tapersModern spectral estimation, based on AR modelsKharounen-Loeve expansion
All the methods have been tested using LIGO 40m data

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Multi-tapering in one slide
Purpose: control both bias and variance of a spectral estimate, over a finite sample.
Perform several spectral estimates with different windows, and average.
Choose the windows so as to be “orthogonal”, at fixed frequency resolution.
Use the so called Discrete Prolate Spheroidal Sequences

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
A typical noise spectrum (LIGO 40m)
Wideband
Narrow spectral features Physical resonances Harmonics of the line
Need to monitor the spectrum over time.

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Comparison of spectral estimates (1)
The Hamming window gives the best resolution.
Lower variance from the multi-taper estimate
Better choice: adapt the coefficients of the different tapers.
Warning: this is actually an harmonic of the 60 Hz line!

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Comparison of spectral estimates (2)
The use of several different windows is possible only reducing the frequency resolution: NumTapers <= N
The f.r. is necessarily more limited, as at the 300 Hz line.
Adapting the tapers helps off-resonance.

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Modern spectral estimates
Model the noise as gaussian noise filtered through a linear model.
Estimate the model parameters.
Choose the model order on the basis of the final prediction error.
2
1
1
1P
tP
P
nntnt
PN
PNFPE
xax

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Low order models
The FPE criterion is not robust enough: it is not sensitive to the narrow spectral features.
The suggested order is definitely too small.

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Higher order models
Increasing the order the narrow features are resolved.
Monitoring the values of the coefficients, that is the zeros (and poles, for ARMA models) one can detect non-stationarities.
But: some of the lines are actually discrete components of the spectrum.

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Karhounen-Loeve basis
Spectral estimates rely on the statistical independence of the different lines
The KL basis gives statistically independent coefficients also over short samples.
nmmn
N
n
ntnt
ccE
cx
1

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Eigenvalues and RMS noise
The basis elements are the eigenvectors of the correlation matrix R.
The eigenvalues measure how each component contributes to the RMS noise.
N
Mnntt
nt
NM
nnt
ntn
nttt
xxE
cx
R
1
2
1
''
~
~

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
KL as a selector of spectral features
Each KL element actually corresponds to some spectral feature.
They are ordered on the basis of the relative RMS “importance.”

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Coefficient monitoring (1)
Pairs of KL basis elements correspond to the same eigenvalue
Coefficients estimated from different samples are uncorrelated and gaussianly distributed.
In other languages they correspond to the Principal Components of the noise spectrum
Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
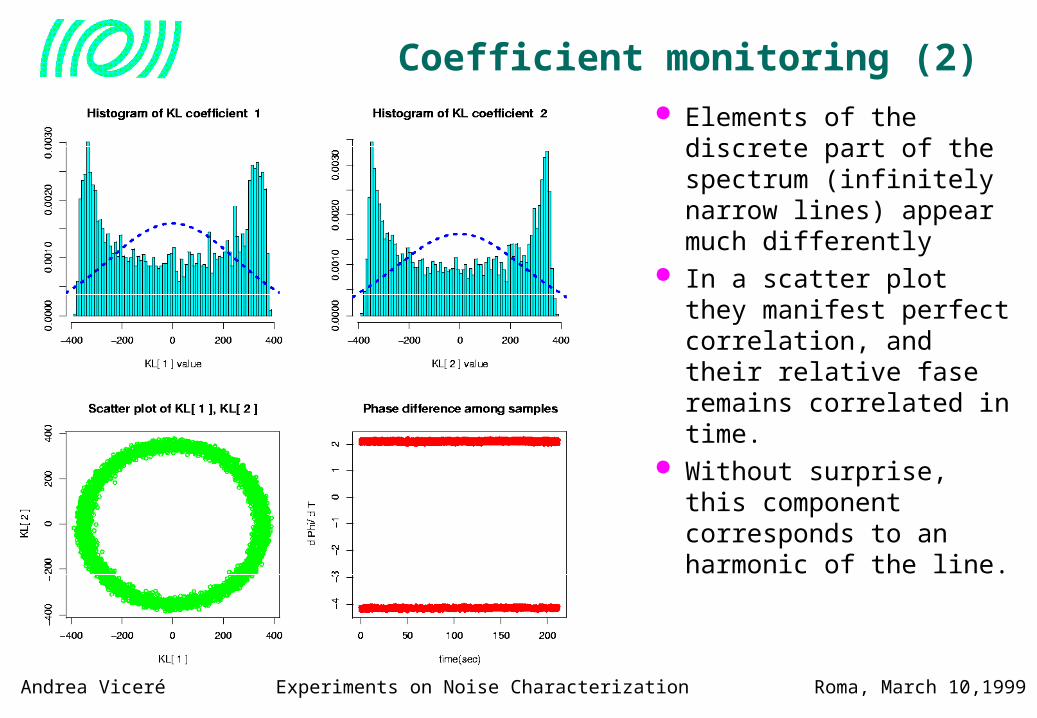
Coefficient monitoring (2)
Elements of the discrete part of the spectrum (infinitely narrow lines) appear much differently
In a scatter plot they manifest perfect correlation, and their relative fase remains correlated in time.
Without surprise, this component corresponds to an harmonic of the line.

Experiments on Noise Characterization Roma, March 10,1999Andrea Viceré
Coefficient monitoring (3)
Deviations from the predicted model may signal a change of noise level in the specific component.
In the specific example, the damping out of a resonance possibly excited by the lock acquisition.