experience with a model-based safety analysis process for
TRANSCRIPT

Experience with a Model-based Safety Analysis Process
for an Autonomous Service Robot
Damien Martin-Guillerez, Jérémie Guiochet, David Powell
The Seventh IARP Workshop on Technical Challenges for Dependable Robots in Human Environments June 16-17, 2010, LAAS-CNRS (Toulouse, France)

An Autonomous Service Robot: The MIRAS Robot
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 2

Building a safe system…
Building a zero-risk system is impossible Totally correct specification
All hazardous situations predicted All hazardous situations correctly handled
Totally correct design
But… Justified confidence that the specification covers the most
hazardous situations Justified confidence that the design includes adequate protection
techniques
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 3

Building a safe system…
Safety: absence of unacceptable risk
Safety analysis process: identify risk and reduce it if not acceptable
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 4
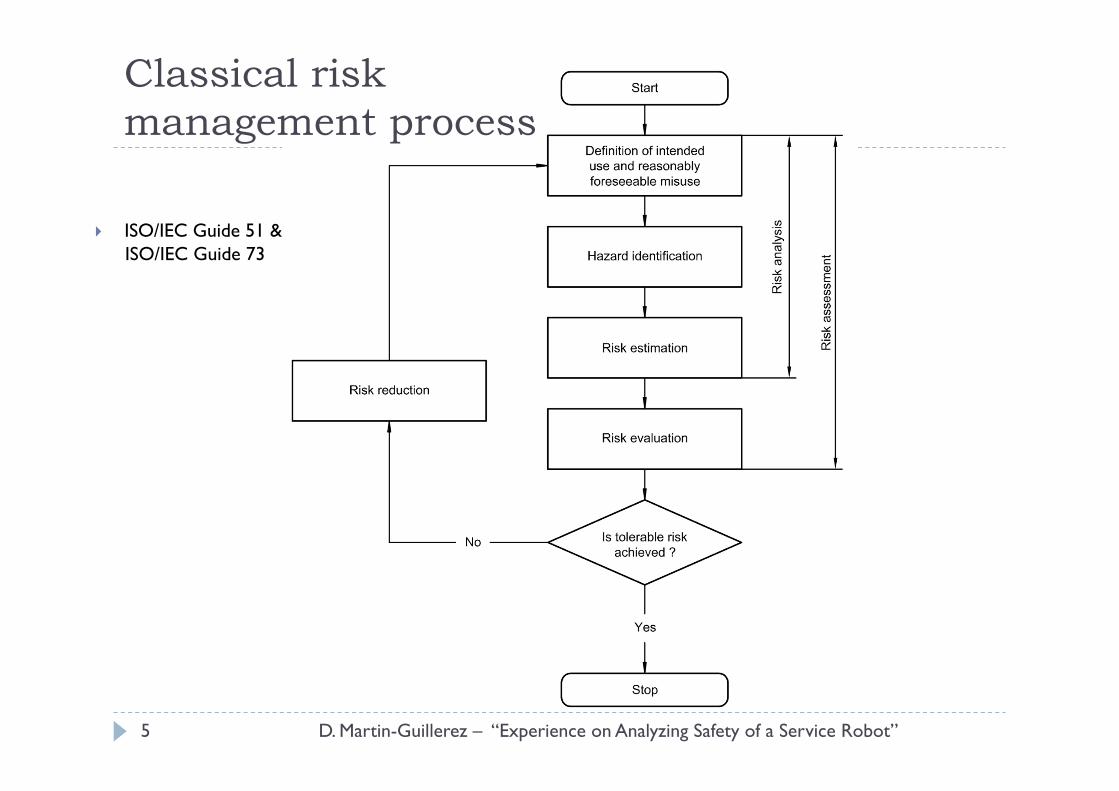
Classical risk management process
5
ISO/IEC Guide 51 & ISO/IEC Guide 73
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Model-based safety analysis methods
6
Predictive safety analysis requires a system model Little work on specification or requirement
modelling and safety analysis Mainly research papers Languages and techniques difficult to understand for non-specialists
Applicability of existing model-based methods to safety critical autonomous systems is limited due to:
Unstructured environment Infinite operation conditions Decisional layer Non-deterministic behaviour Human factors Rarely integrated in classical methods
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Our proposal
7
Adapt the classical risk management process by using UML (Unified Modelling Language) to model the system, including the user
Why UML? De facto standard Use case and sequence diagrams are easily understandable by
non-experts Diagrams can also be used for development process Models include the user
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Outline
Methodology Application in the MIRAS project Conclusions
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 8

Outline
Methodology Application in the MIRAS project Conclusions
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 9

Hazard List
Recommendations
Preliminary Hazard list
Operational Hazard list
ISO/IEC GUIDE 51:1999(E)
4 © ISO/IEC 1999 – All rights reserved
5.3 Tolerable risk is achieved by the iterative process of risk assessment (risk analysis and risk evaluation)and risk reduction (see Figure 1).
Figure 1 — Iterative process of risk assessment and risk reduction
6 Achieving tolerable risk
The following procedure (see Figure 1) should be used to reduce risks to a tolerable level:
a) identify the likely user group(s) for the product, process or service (including those with special needs and theelderly), and any known contact group (e.g. use/contact by young children);
b) identify the intended use and assess the reasonably foreseeable misuse of the product, process or service;
c) identify each hazard (including any hazardous situation and harmful event) arising in all stages andconditions for the use of the product, process or service, including installation, maintenance, repair anddestruction/disposal;
d) estimate and evaluate the risk (see Figure 1) to each identified user/contact group arising from the hazard(s)identified;
Use case
diagrams
Risk ListMinimal cut sets
and risk estimation
UML Modelling
PHA (Preliminary
Hazard Analysis)
HAZOP-UML
(HAZard OPerability)
FTA
(Fault Tree Analysis)
Ris
k A
na
lysis
Risk reduction
policies application
Sequence
diagrams
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”
10
Vue globale du processus de gestion du risque dans MIRAS

Step 1: Definition of intended use with UML
Use cases Describe the intended use
of the robot Completed with conditions
Sequence diagrams Describe nominal scenarios
corresponding to the use cases
Messages are either actions (self-message) or interactions
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 11

Step 2: Hazard identification
PHA (Preliminary Hazard Analysis) Brainstorming meeting with the various stakeholders
Fast and easy to perform Identify:
Major environmental hazards Standard hazards related to machines
HAZOP-UML (HAZard OPerability for UML) Systematic application Identification of operational hazards
The two methods are complementary: PHA: top-down HAZOP-UML: middle-out
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 12

Step 2: Hazard identification HAZOP principle
Element X Guideword = Deviation E.g., Pressure X More = “too much pressure”
Adaptation to UML use cases and sequence diagrams
(Martin-Guillerez et al. 2010) D. Martin-Guillerez, J. Guiochet, D. Powell, C. Zanon, A UML-based method for risk analysis of human-robot interaction, SERENE Workshop, London, UK, 2010
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 13
System
No/None Complete negation of the design
No part of the intention is achived and
nothing else happens
More Quantitative increase
Less Quantitative decrease

Step 2: Hazard identification HAZOP tables
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 14
Date:
Prepared by:
Revised by:
Approved by:
Line
NumberElement Guideword Deviation
Use Case
Effect
Real World
EffectSeverity
Possible
Causes
Integrity Level
Requirements
New Safety
RequirementsRemarks
Hazard
Number
Use case name:
Project:
Use case description
22/09/13
HAZOP table number: Damien Martin-Guillerez
Entity:

Step 2: Hazard identification HAZOP guidewords adaptation to UML
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 15
Entity = Sequence Diagram
Attribute Guideword Interpretation
No Message is not sent
Other than Unexpected message is sent
As well as Message is sent as well as another message
More than Message sent more often than intended
Less than Message sent less often than intended
Before Message sent before intended
After Message sent after intended
Part of Only a part of a set of messages is sent
Predecessors / successors during
interaction
Reverse Reverse order of expected messages
As well a s Message sent at correct time and also at incorrect tim e
Early Message sent earlier than intended time Message timing
Later Message sent later than intended time No Message sent to but never received by intended objec t Other than Message sent to wrong object As well as Message sent to correct object and also an incorrect object Reverse Source and destination objects are reversed More Message sent to more objects than intended
Sender / receiver objects
Less Message sent to fewer objects than intended

Step 3: Risk estimation Estimate severity and likelihood of possible harms
First iteration of the process Impossible to precisely estimate the risk (preliminary design) Preliminary Safety Integrity Level
Further iterations of the process Occurrence estimation using FTA (Fault-Tree Analysis)
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 16
Num. Severity Type of injury SIL
0 None None 0
1 Minor Superficial injury 0
2 Moderate Recoverable 0
3 Serious Possibly recoverable 1
4 Severe Not fully recoverable without care 2
5 Critical Not fully recoverable with care 3
6 Fatal Not survivable 4

Step 4: Risk evaluation Decide if the risk is acceptable or not
Application to innovative projects Several versions of the robot : e.g, development, evaluation, final
(MIRAS) Risk acceptance criteria depending on the version
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 17
10 A Safety Strategy for Rehabilitation Robots 181
10.3 Case Study on Safety of Rehabilitation Robots
In general, the risk assessment and the risk reduction of machinery are carried outaccording to ISO/TR 12100-1 “Safety of machinery-Basic concepts, general prin-ciple for design” and ISO 14121:1999 “Safety of machinery-principles of risk as-sessment”. In Japan, the special committee for standardizing rehabilitation robotshas been established by the Japan Robot Association in 2001. The committeemembers, who are researchers of medical and rehabilitation robots, carried outCase Study of assessing several medical and rehabilitation robots according toISO/TR 12100-1:1992 and ISO 14121:1999. The aim of this case study is to clar-ify the key points of risk assessment and risk reduction for these robots. The fol-lowing medical and rehabilitation robots are carried out case study of the risk as-sessment by use of block chart shown in Fig. 10.3 which is Fig. 10.2 modified byISO14971, that is "Medical devices: Application of risk management to medicaldevices".
Fig. 10.3. The iterative process to achieve safety which is Fig. 10.2 modified by ISO 14971
• Medical robotso Neurosurgical roboto Laparoscopic surgery roboto Continuous passive motion device (CMP)

Step 5: Risk reduction Change the system to reduce its associated risk
Types of recommendations Design Additional protection Use Define rules of allowed usage
Application of recommendations Coming from hazard identification and risk estimation steps According to the version label issued in the risk evaluation step
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 18

Outline
Methodology Application in the MIRAS project Conclusions
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 19

The MIRAS project: A robotic strolling assistant
Goal Help in standing up, walking
and sitting down For people suffering from
gait and orientation problems
Means Motorised base and moving
handlebar Sensors to detect patient’s
position and health condition
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 20

Results in the MIRAS project
First iteration of the process 11 use cases, 12 sequence diagrams 13 hazards identified 29 recommendations
Now design of the MIRAS robot 12 recommendations already applied Modification of the UML models
4 new use cases and 4 new sequence diagrams Modification of one use case and its associated sequence diagram
Second iteration of the process on the new UML model
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 21

Extract of proposed risk reduction in MIRAS
Hazardous situation Risk reduction techniques Type Applied
Robot out of power during strolling Switch to safe mode when battery falls below x% of its charge
Design ✔
Sudden fatigue of the patient General failure of the robot
Design a seat on the robot Use ✔
Patient’s hands are pinched between a table and the handles
Protect hands by curving the handles Design ✔
The patient goes backward to sit down but cannot see her destination
Sitting down operation was redefined. UML Models modified.
Use ✔
General failure of the robot outside medical staff range of sight
Regular network heartbeat. Alarm on message absence Design ✔
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 22

Second MIRAS robot design
New use cases Sitting down on the robot’s
seat Getting up from the robot’s
seat Using the robot as an
motorized wheelchair Pushing an object using the
robot
Redefinition of the Sitting down operation
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 23

Outline
Methodology Application in the MIRAS project Conclusions
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 24

Method evaluation
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 25
Integrability with the development process Shared UML models Parallel safety analysis
Usability Low overhead
few hours sessions with all the experts few weeks for the overall analysis by the safety expert
UML-HAZOP book-keeping helped by a CASE tool Validity
PHA identifies the classical machinery hazards UML-HAZOP identifies the major operational hazards due to new
technology Applicability
Hazard and recommendation lists have been validated by robotic experts
Recommendations applied by the experts

Next steps
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 26
Complete the second iteration of the process HAZOP analysis of the second design (done) FTA for risk estimation (not started)
UML statechart model of the robot HAZOP deviation of the statechart (under study) Development of a method for the automatic generation of
deviations of scenarios, may be based on statechart modelling (not started)

Thank you for your attention.
Questions?
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Why UML, PHA and HAZOP ?
28
UML (Unified Modelling Language) De facto standard Usage diagrams (Use case and sequence diagrams) are easily
understandable by non-experts Diagrams can also be used for development process Inclusion of the user in the models
PHA (Preliminary Hazard Analysis) Fast and easy to perform Enables identification of main hazards
HAZOP (HAZard OPerability) A well-known technique (70’s) Identifies hazards and proposes recommendations with low-level
details on the design
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Step 2: Hazard identification HAZOP process adaptation
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 29

Example of UML-HAZOP application (2)
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 30

HAZOP guidewords adaptation for UML use case
Entity = Use Case
Attribute Guideword Interpretation No/non e The condition is not evaluated and can have any valu e
Other than The condition is evaluated true whereas it is false The condition is evaluated false whereas it is true
As well as The condition is correctly evaluated but other unexpected conditions are true
Part of The condition is partially evaluated Some conditions are missing
Early The condition is evaluated earlier than required (other condition(s) should be tested before) The condition is evaluated earlier than required for correct synchronization with the environment
Preconditions / Postconditions /
Invariants
Late
The condition is evaluated later than required (condition(s) depending on this one should have already been tested) The condition is evaluated later than required for correct synchronization with the environment
31 D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

UML sequence diagram attributes
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot” 32

HAZOP guidewords adaptation for UML sequence diagram
Entity = Sequence Diagram
Attribute Guideword Interpretation
No Message is not sent
Other than Unexpected message is sent
As well as Message is sent as well as another message
More than Message sent more often than intended
Less than Message sent less often than intended
Before Message sent before intended
After Message sent after intended
Part of Only a part of a set of messages is sent
Predecessors / successors during
interaction
Reverse Reverse order of expected messages
As well a s Message sent at correct time and also at incorrect tim e
Early Message sent earlier than intended time Message timing
Later Message sent later than intended time No Message sent to but never received by intended objec t Other than Message sent to wrong object As well as Message sent to correct object and also an incorrect object Reverse Source and destination objects are reversed More Message sent to more objects than intended
Sender / receiver objects
Less Message sent to fewer objects than intended
33 D. Martin-Guillerez – “Experience on Analyzing Safety of a
Service Robot”

HAZOP guidewords adaptation for UML sequence diagram (2)
No/non e The condition is not evaluated and can have any value (omission )
Other than The condition is evaluated true whereas it is false, or vice versa (commission)
As well as The condition is well evaluated but other unexpected conditions are true Part of Only a part of condition is correctly evaluated Message condition
Late
The condition is evaluated later than required (other dependent condition(s) have been tested before) The condition is evaluated later than correct synchronization with the environment
No/Non e Expected parameters are never set / returned
More Parameters values are higher than intended
Less Parameters values are lower than intended
As Well As Parameters are also transmitted with unexpected ones
Part of Only some parameters are transmitted Some parameters are missing
Message parameters / return parameters
Other than Parameter type / number are different from those expected by the receiver
34 D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”

Motivations
35
Related work on model based/driven safety analysis methods and tools: Based on design models with different description
languages (e.g., Statemate, SCADE, Altarica, etc.) Perform automatic analysis (sequence generation, fault tree and
FMEA synthesis, model checking, etc.) Many associated tools (Cecilia OCAS ©Dassault, HIP-HOPS © Univ.
of Hull., Statemate STSA © IBM, COMPARE © FBK, etc.)
D. Martin-Guillerez – “Experience on Analyzing Safety of a Service Robot”