exact inference on graphical models samson cheung
TRANSCRIPT

Exact Inference on Graphical Models
Samson Cheung

Outline
What is inference? Overview Preliminaries Three general algorithms for inference
Elimination Algorithm Belief Propagation Junction Tree

What is inference?
Given a fully specified joint distribution (database), inference is to query information about some random variables, given knowledge about other random variables.
Given a fully specified joint distribution (database), inference is to query information about some random variables, given knowledge about other random variables.
Evidence: xE
Query about XF?
Information about XF

Conditional/Marginal Prob.
Ex. Visual Tracking – you want to compute the conditional to quantify the uncertainty in your tracking
Evidence: xE
Conditional of XF?

Maximum A Posterior Estimate
Evidence: xE
Most likely valueof XF?
Error Control – Care about the decoded symbol. Difficult to compute the error probability in practice due to high bandwidth.
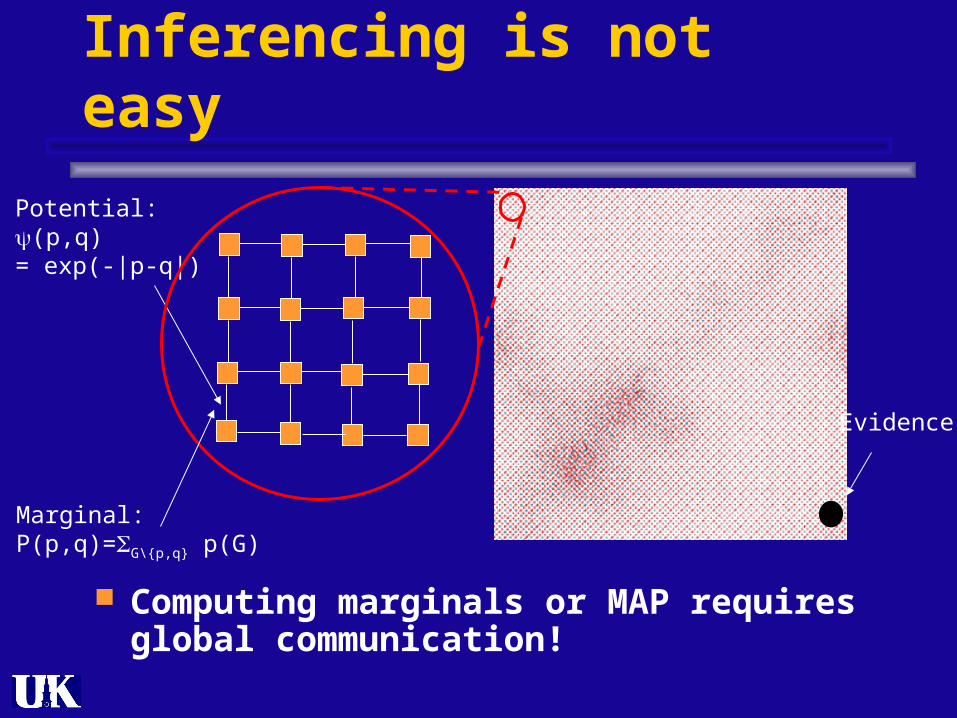
Inferencing is not easy
Computing marginals or MAP requires global communication!
Marginal:P(p,q)=G\{p,q} p(G)
Potential:(p,q) = exp(-|p-q|)
Evidence

Outline
What is inference? Overview Preliminaries Three general algorithms for inference
Elimination Algorithm Belief Propagation Junction Tree

Inference Algorithms
General Inference Algorithms
EXACT APPROXIMATE
General Graph
JUNCTIONTREE
ELIMINATIONALGORITHM
Polytrees
BELIEF PROPAGATION
1. Iterative Conditional Modes2. EM 3. Mean field4. Variational techniques5. Structural Variational
techniques6. Monte-Carlo 7. Expectation Propagation8. Loopy belief propagation
NP -hard
>1000 nodes:Image ProcessingVisionPhysics
10-100 nodes:Expert systemsDiagnosticsSimulation

Outline
What is inferencing? Overview Preliminaries Three general algorithms for inferencing
Elimination Algorithm Junction Tree Probability Propagation

Introducing evidence Inferencing : summing or maxing “part” of the
joint distribution
In order not to be sidetrack by the evidence node, we roll them into the joint by considering
Hence we will be summing or maxing the entire joint distribution
Calculating Marginal

Moralization
Every directed graph can be represented as an undirected by linking up parents who have the same child.
Deal only with undirected graph
X2 X3
X1
X4
X5 X6
P(X1)P(X2|X1)P(X3|X1)P(X4|X1)P(X5|X2,X3)P(X66|X3,X4)
X2 X3
X1
X4
X5 X6
(X1,X2,X3)(X1,X3,X4)(X2,X3,X5) (X3,X4,X6)
π
π

Adding edges is “okay”
The pdf of an undirected graph can ALWAYS be expressed by the same graph with extra edges added.
A graph with more edge Lose important conditional independence information
(okay for inferencing, not good for parameter est.) Use more storage (why?)
X2 X3
X1
X4
X5 X6
(X1,X2,X3)(X1,X3,X4)(X2,X3,X5) (X3,X4,X6)
X2 X3
X1
X4
X5 X6
(X1,X2,X3,X4)(X2,X3,X5) (X3,X4,X6)
π

Undirected graph and Clique graph
Clique graph Each node is a clique from the parametrization An edge between two nodes (cliques) if the two
nodes (cliques) share common variables
X2 X3
X1
X4
X5 X6
C1(X1,X2,X3)
C2(X1,X3,X4)
C3(X2,X3,X5) C4(X3,X4,X6)
C5(X7,X8,X9)
C6(X1,X7)
X7 X8
X9
C1
C3
C2
C6
C4
C5
Separator:C1 C3={X2,X3}

Outline
What is inference? Overview Preliminaries Three general algorithms for inference
Elimination Algorithm Belief Propagation Junction Tree

Computing Marginal
Need to marginalize x2,x3,x4,x5
We need to sum N5 terms (N is the number of symbols for each r.v.)
Can we do better?
X1
X2
X3
X4
X5

Elimination (Marginalization) Order
Try to marginalize in this order: x5, x4, x3, x2
Complexity: O(KN3), Storage: O(N2) K=# r.v.s
C: O(N3)S: O(N2)C: O(N2)S: O(N)C: O(N3)S: O(N2)C: O(N2)S: O(N)

MAP is the same
Just replace summation with max
Note All the m’s are different from marginal Need to remember the best configuration as you go
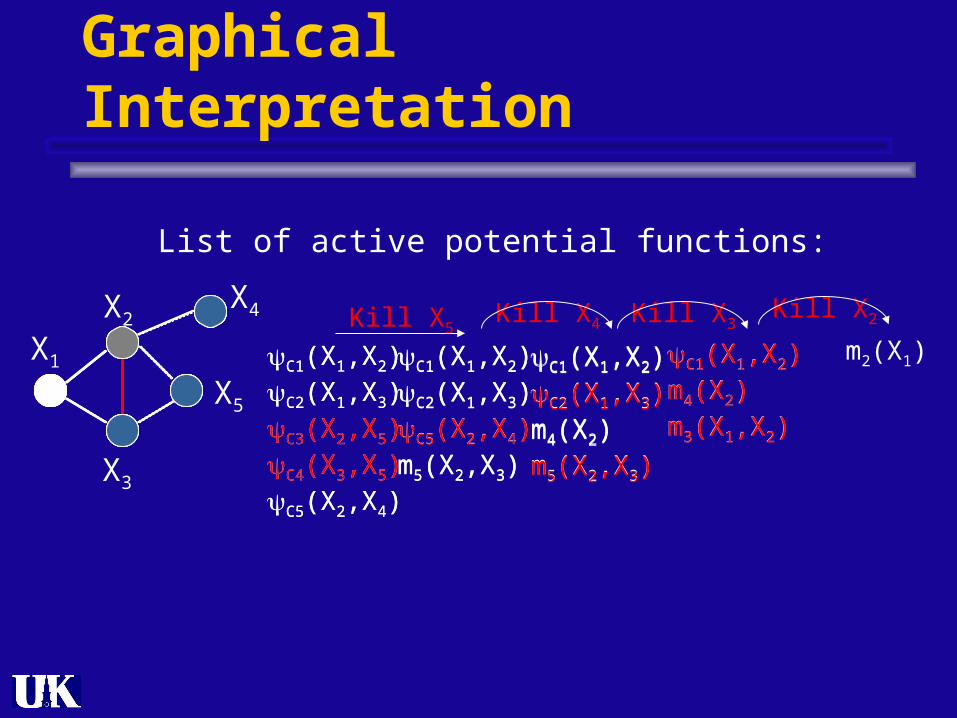
Graphical Interpretation
X1
X2
X3
X4
X5
List of active potential functions:
C1(X1,X2)C2(X1,X3)C3(X2,X5)C4(X3,X5)C5(X2,X4)
C1(X1,X2)C2(X1,X3)C3(X2,X5)C4(X3,X5)C5(X2,X4)
C1(X1,X2)C2(X1,X3)C5(X2,X4)m5(X2,X3)
Kill X5
C1(X1,X2)C2(X1,X3)C5(X2,X4)m5(X2,X3)
C1(X1,X2)C2(X1,X3)m4(X2)m5(X2,X3)
Kill X4
C1(X1,X2)C2(X1,X3)m4(X2)m5(X2,X3)
C1(X1,X2)m4(X2)m3(X1,X2)
Kill X3
C1(X1,X2)m4(X2)m3(X1,X2)
m2(X1)
Kill X2

First real link to graph theory
Reconstituted Graph = the graph that contain all the extra edges after the elimination
Depends on the elimination order!
X3
X1
X2X4
X5
The complexity of graph elimination is O(NW), where W is
the size of the largest clique in the reconstituted graph The complexity of graph elimination is O(NW), where W is
the size of the largest clique in the reconstituted graph Proof : Exercise

Finding the optimal order
To minimize the clique size turns out to be NP-hard1
Greedy algorithm2:1. Find the node v in G that connects to the
least number of neighbors
2. Eliminate v and connect all its neighbors
3. Go back to 1 until G becomes a clique Current best techniques use other simulated
annealing3 or approximated algorithm4
1 S. Arnborg, D.G. Corneil, A. Proskurowski, Complexity of finding embeddings in a k-tree, SIAM J.Algebraic and Discrete Methods 8 (1987) 277–284.2 D. Rose, Triangulated graphs and the elimination process, J. Math. Anal. Appl. 32 (1974) 597–609.3U. Kjærulff, Triangulation of graph-algorithms giving small total state space, Technical Report R 90-09, Department of Mathematics and Computer Science, Aalborg University, Denmark, 1990.4A. Becker, D. Geiger, “A sufficiently fast algorithm for finding close to optimal clique trees,” Arificial Intelligence 125 (2001) 3-17

This is serious
One of the most commonly used graphical model in vision is Markov Random Field
Try to find a elimination order of this model.
Pixel: I(x,y)
(p,q) = exp(-|p-q|)
Largest clique: 4Grow linearly with dimension (?)

Outline
What is inference? Overview Preliminaries Three general algorithms for inference
Elimination Algorithm Belief Propagation Junction Tree

What about other marginals?
We have just computed P(X1).
What if I need to compute P(X1) or P(X5) ?
Definitely, some part of the calculation can be reused! Ex. m5(X2,X3) is the same for both!
X1
X2
X3
X4
X5

Focus on trees
Focus on tree like structures:
Why trees?
UndirectedTree
Directed Tree= undirected tree after moralization
Why trees?
No moralization is necessary
There is a natural elimination ordering with query node as root Depth first search : all children before parent
All sub-trees with no evidence nodes can be ignored (Why? Exercise for the undirected graph)

Elimination on trees
When we eliminate node j, the new potential function must be
A function of xi
Any other nodes? nothing in the sub-tree below j
(already eliminated) nothing from other sub-trees, since
the graph is a tree only i, from ij which relates i and j
Think of the new potential functions as a message mji(xi) from node j to node i
Think of the new potential functions as a message mji(xi) from node j to node i
mji(xi)

What is in the message?
This message is created by summing over j the product of all earlier messages mkj(xj) sent to j as well as E(xj) (if j is an evidence node).
• c(j) = children of node j• E(xj) = δ(xj=xj) if j is an evidence node; 1 otherwise

Elimination = Passing message upward
After passing the message up to the query (root) node, we compute the conditional:
What about answering other queries?
= query node (need 3 messages)

Messages are reused!
We can compute all possible messages in only double the amount of work it takes to do one query.
Then we take the product of relevant messages to get marginals.
Even though the naive approach (rerun Elimination) needs to compute N(N-1) messages to find marginals for all N query nodes, there are only 2(N-1) possible messages.
Even though the naive approach (rerun Elimination) needs to compute N(N-1) messages to find marginals for all N query nodes, there are only 2(N-1) possible messages.

Computing all possible messages
Idea: respect the following Message-Passing-Protocol:
A node can send a message to a neighbour only when it has received messages from all its other neighbours.
Protocol is realizable: designate one node (arbitrarily) as the root.
Collect messages inward to root then distribute back out to leaves.

Belief Propagation
i
j
k lmkj mlj
mji
mij
mjk mjl

Belief Propagation (sum-product)
1. Choose a root node (arbitrarily or as first query node).
2. If j is an evidence node, E(xj) = (xj=xj), else E(xj) = 1
3. Pass messages from leaves up to root and then back down using:
4. Given messages, compute marginals using:

MAP is the same (max-product)
1. Choose a root node arbitrarily.
2. If j is an evidence node, E(xj) = (xj=xj), else E(xj) = 13. Pass messages from leaves up to root using:
4. Remember which choice of xj = xj* yielded maximum.5. Given messages, compute max value using any node i:
6. Retrace steps from root back to leaves recalling best x j to get the maximizing argument (configuration) x.

“Tree”-like graphs work too
Pearl (1988) shows that BP works for factor tree See Jordan Chapter 4 for more details
This is not a directed tree
After moralization Corresponding factor graph IS A TREE

Outline
What is inference? Overview Preliminaries Three general algorithms for inference
Elimination Algorithm Belief Propagation Junction Tree

What about arbitrary graphs?
BP only works on tree-like graphs Question: Is there an algorithm for general
graph?
Also, after BP, we get the marginal for each INDVIDUAL random variables But the graph is characterized by cliques
Question: Can we get the marginal for every clique?

Mini-outline
Back to Reconstituted Graph Three equivalent concepts
Triangulated graph – easy to validate Decomposable graph – link to probability Junction Tree – computational inference
Junction Tree Algorithm Example
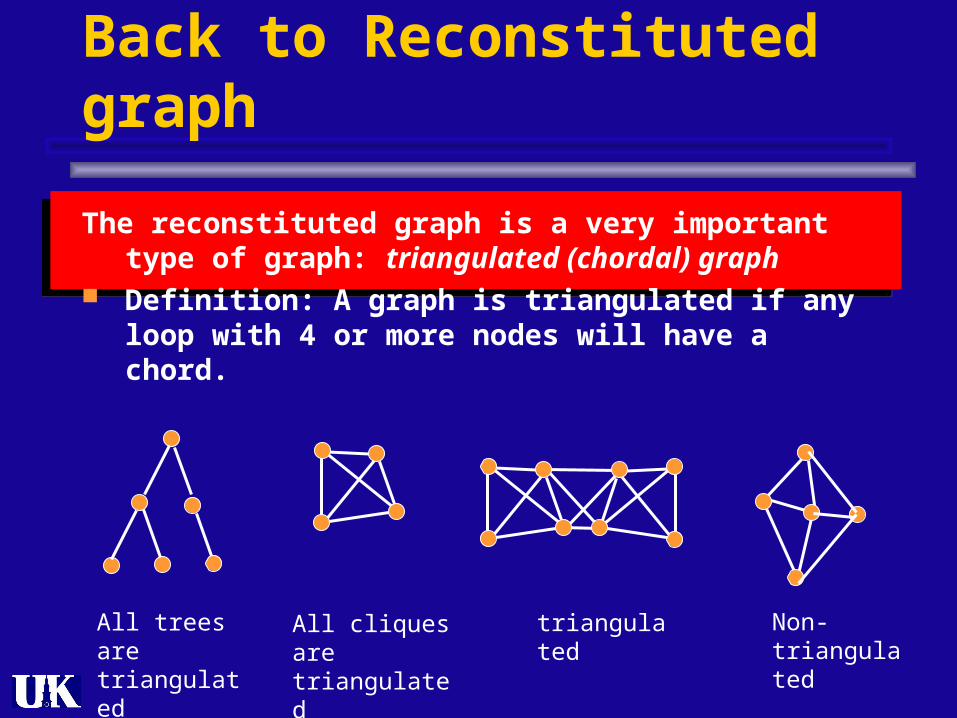
Back to Reconstituted graph
The reconstituted graph is a very important type of graph: triangulated (chordal) graph
Definition: A graph is triangulated if any loop with 4 or more nodes will have a chord.
All trees are triangulated
All cliques are triangulated
triangulated Non-triangulated

v = first node eliminated
Proof
Prove for any N-node graph, the reconstituted graph after elimination is triangulated.
Proof: By induction1. N=1 : trivial
2. Assume N=k is true.
3. N=k+1 case: Reconstituted graph with k nodes triangulated
Added during eliminationchordal
v
Lessons from graph theory
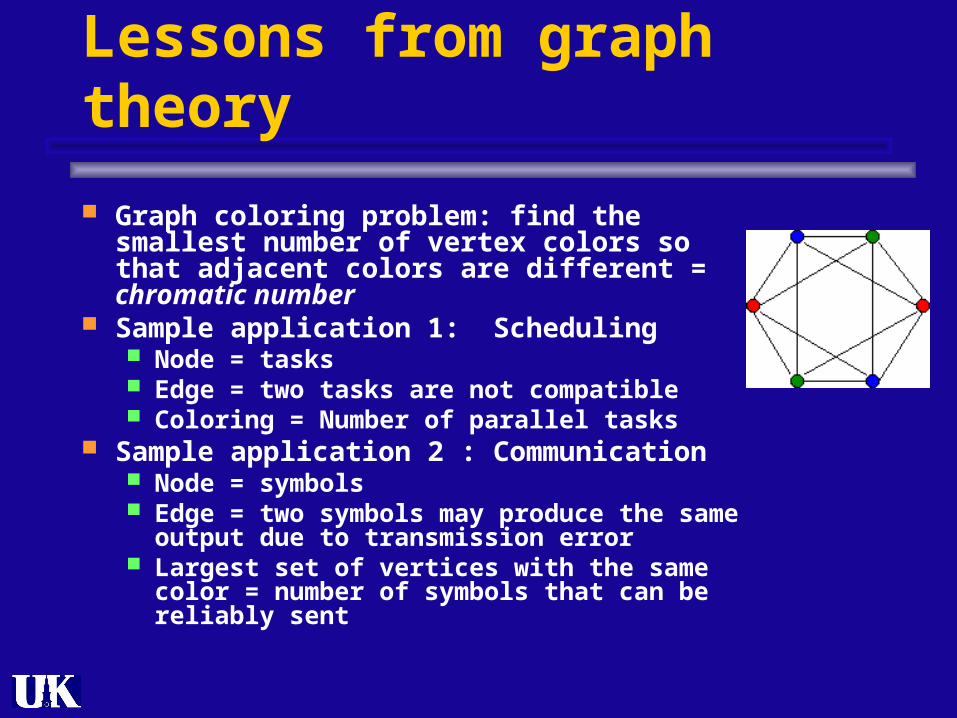
Graph coloring problem: find the smallest number of vertex colors so that adjacent colors are different = chromatic number
Sample application 1: Scheduling Node = tasks Edge = two tasks are not compatible Coloring = Number of parallel tasks
Sample application 2 : Communication Node = symbols Edge = two symbols may produce the same
output due to transmission error Largest set of vertices with the same color =
number of symbols that can be reliably sent

Lesson from graph theory
Determining the chromatic number is NP-hard Not so for a general type of graph called Perfect
Graph Definition: = the size of the largest clique Triangulated graph is an important type of perfect
graphs. Strong Perfect Graph Conjecture was proved in 2002
(148-page!) Bottom line: Triangulated graph is “algorithmically
friendly” – very easy to check whether a graph is triangulated and to compute properties from such a graph.

Link to Probability: Graph Decomposition
Definition: Given a graph G, a triple (A,B,S) with Vertex(G) = ABS is a decomposition G if 1. S separates A and B (i.e. every path from aA to bB
must past through S.
2. S is a clique Definition: G is decomposable if
1. G is complete or
2. There exist a decomposition (A,B,S) of G such that AS and BS are decomposable.
A BS

What’s the big deal?
Decomposable graph can be parametrized by marginals!
If G is decomposable, then
where C1,C2, …,CN are cliques in G, and S1,S2, …,SN-1 are (special) separators between cliques. Notice there are one less separators than cliques.
Equivalently, we can say that G can parameterized by marginals p(xC) and ratios of marginals, p(xC)/p(xS)

This is not true in general
If the graph can be expressed in terms of a product marginals or ratio of marginals, at least one of the potentials is a marginal.
However, f(XAB) is not a constant
A B
CD

Proof :
Proof by induction:
G can be decomposed into A,B, and S, where AS and B S are decomposable; S separates A and B and is complete.
A BS
All cliques are subsets of either AS or B S

Continue
Recursively apply on AS and BS based on induction assumption.

So what?
TriangulatedGraph
DecomposableGraph
Nice algorithmically Parametrized by marginals
It turns out that
Triangulated Graph Decomposable Graph
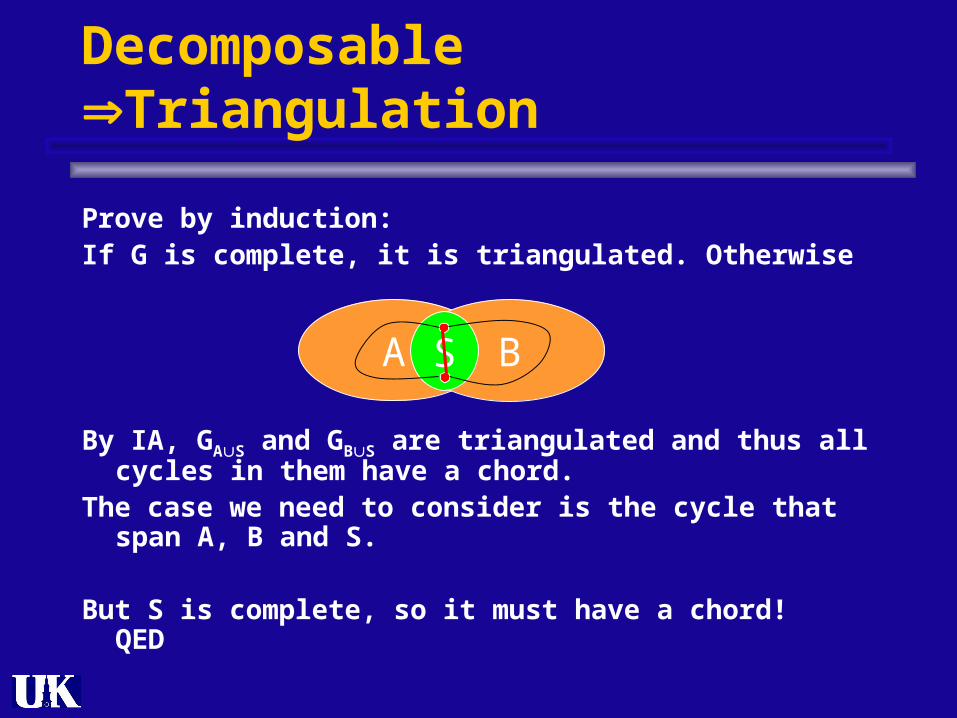
Prove by induction:If G is complete, it is triangulated. Otherwise
By IA, GAS and GBS are triangulated and thus all cycles in them have a chord.
The case we need to consider is the cycle that span A, B and S.
But S is complete, so it must have a chord! QED
Decomposable Triangulation
A BS

TriangulationDecomposable
Prove by induction. Let G be a triangulated graph with N nodes. Show is G can be decomposed into (A,B,S).
If G’s complete, done. If not, choose non-adjacent a and b.
S = smallest set that intersects with all paths between a and b.
A = all nodes in G\S reached by a
B = all nodes in G\S reached by b
Cleary A and B are separated by S.
a bS
BA

TriangulationDecomposable
Need to prove S is complete. Consider arbitrary c,dS.
There is a path acb such that c is the only node in S. If not, then S is not minimum as c can be put into either A or B.
Similarly, there is a path adb. Now we a cycle.
Since G is triangulated, this cycle must have a chord. Since S separates A and B, the chord must be entirely in AS or BS.
Keep shrinking the cycle and eventually there must be a chord between c and d, hence S must be complete.
a bS
c
d
BAa1
b1
a2b2

Recap
Reconstituted graph is triangulated. Triangulated graph = decomposable Joint probability in decomposable graph can
be factorized into marginals and ratios of marginals.
Not very constructive so far: How can we get from LOCAL POTENTIALS to GLOBAL MARGINAL parametrization?

How to get from a local description to a global description?
A decomposable graph (V\S,W\S,S):
At the beginning, we have local representations:
We want
V WS
Message passing
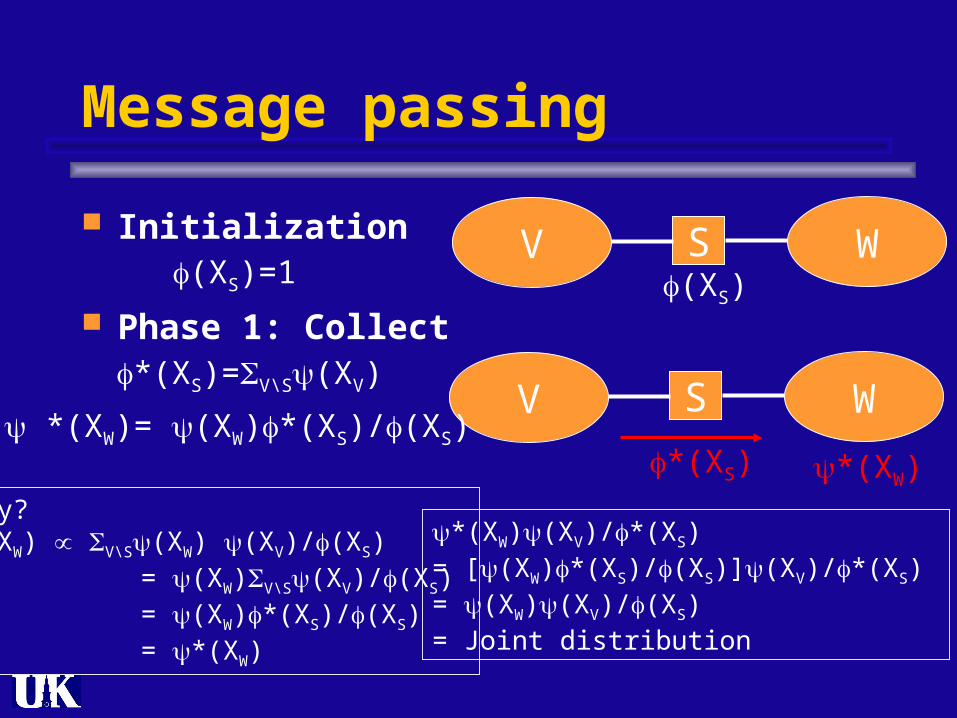
Initialization
Phase 1: Collect
V WS
V WS
(XS)(XS)=1
*(XS)=V\S(XV)
*(XW)= (XW)*(XS)/(XS)*(XS) *(XW)
Why?P(XW) V\S(XW) (XV)/(XS) = (XW)V\S(XV)/(XS) = (XW)*(XS)/(XS) = *(XW)
*(XW)(XV)/*(XS)= [(XW)*(XS)/(XS)](XV)/*(XS) = (XW)(XV)/(XS)= Joint distribution

Message Passing
Phase 2: Distribute
V WS
**(XS)*(XV)
**(XS)=W\S*(XW) P(XS)
*(XV)= (XV)**(XS)/*(XS)
Why?P(XV) W\S(XW) (XV)/(XS) = W\S*(XW) (XV)/*(XS) = (XV)**(XS)/*(XS) = *(XV)
*(XW)*(XV)/**(XS)= *(XW)(XV)/*(XS) = (XW)(XV)/(XS)= Joint distribution

Relating Local Description to Message Passing
How to extend message passing to general graph (in terms of cliques)?
To extend the previous message passing algorithm to general graph, we need a recursive decomposition in terms of cliques.
Answer: Junction Tree

Decomposable graph induces a tree on the clique graph
Let C1, C2, …., CN be all the maximal cliques in G
Every Ci must either be in V or W Since all Ci are maximal, there is an CjV and CkW
such that SCj and SCk Put an edge between Cj and Ck Recursively decompose V and W no loop will form
because of the separation property. The final clique graph is a tree called a Junction Tree
V WSCj CkS S

Properties of a Junction Tree
For any two Ci and Cj, every clique on the unique path on the junction tree between them must contain CiCj
Each branch along the path decompose the graph. So the separator S on the branch must contain CiCj, so
must the clique nodes on either side of the branch Equivalently, for any variable X, all the clique nodes
containing X induces a sub-tree from the junction tree.
Ci CjSA B

Junction Tree Decomposable Graph
Definition: A Junction Tree is a sub-tree of the clique graph such that all the nodes along the path between any two cliques C, D contain CD.
Prove by induction. Simple base case.
For any separator S, the right and left sub-trees to S, R and L, are JT’s so they must be decomposable by IA.
S is complete so it remains to show that S separates R and L.
If not, there exists an edge (X,Y) with XR and YL but X,YS. However, (X,Y) must belong to some clique YR or XL. Thus by the junction tree property, YS or XS. Contradiction.
If a graph has a junction tree, it must be decomposable.

How to find a junction tree?
Not easy from either definition or decomposition. Define edge weight w(s) = number of variables in
the separator s. Let C1 and C2 be the end clique nodes
Total weight of a junction tree
= X [C1{XC}-1]
= X C1{XC}-N
= C X1{XC}-N
= C |C|-N
Each variable induces a subtree in a junction tree

Junction Tree is a maximal spanning clique tree
Consider any clique tree, its total weight
= S|S|
= S X1{XS}
= X S1{XS}
X [C1{XC}-1]
= C X1{XC}-N
= C |C|-N
= weight of a Junction Tree
X
All separators containing X must belong to one of the above edges. Any clique tree can thus contain at most C1{XC}-1 edges from this subgraph.

Example
X2 X3
X1
X4
X5 X6
X7 X8
X9
C1
C3
C2
C6
C4
C5
C1
C3
C2
C6
C4
C5
C3 C4
C1 C2
C6C5
X3
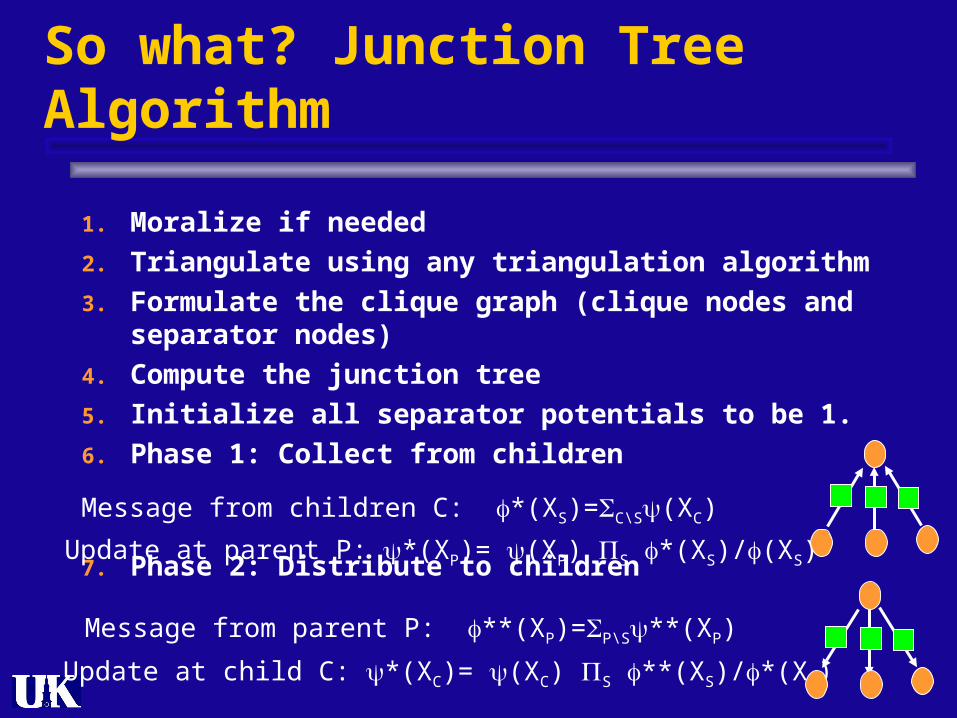
So what? Junction Tree Algorithm
1. Moralize if needed
2. Triangulate using any triangulation algorithm
3. Formulate the clique graph (clique nodes and separator nodes)
4. Compute the junction tree
5. Initialize all separator potentials to be 1.
6. Phase 1: Collect from children
7. Phase 2: Distribute to children
Message from children C: *(XS)=C\S(XC)
Update at parent P: *(XP)= (XP) S *(XS)/(XS)
Message from parent P: **(XP)=P\S**(XP)
Update at child C: *(XC)= (XC) S **(XS)/*(XS)

CHILD Network

Step 1: Moralization

Step 2: Triangulation
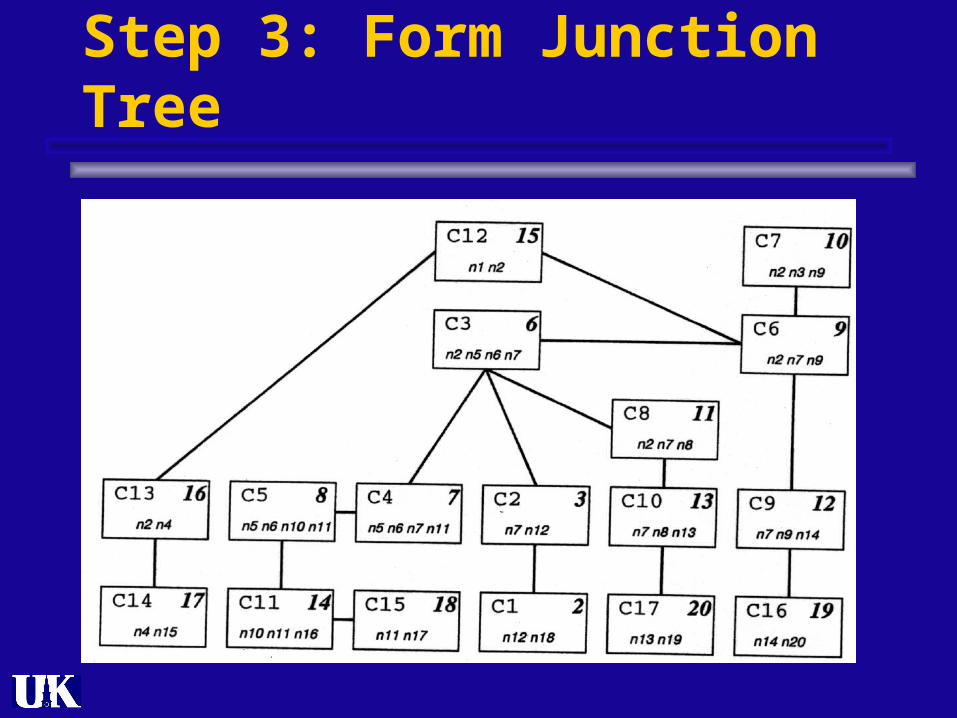
Step 3: Form Junction Tree
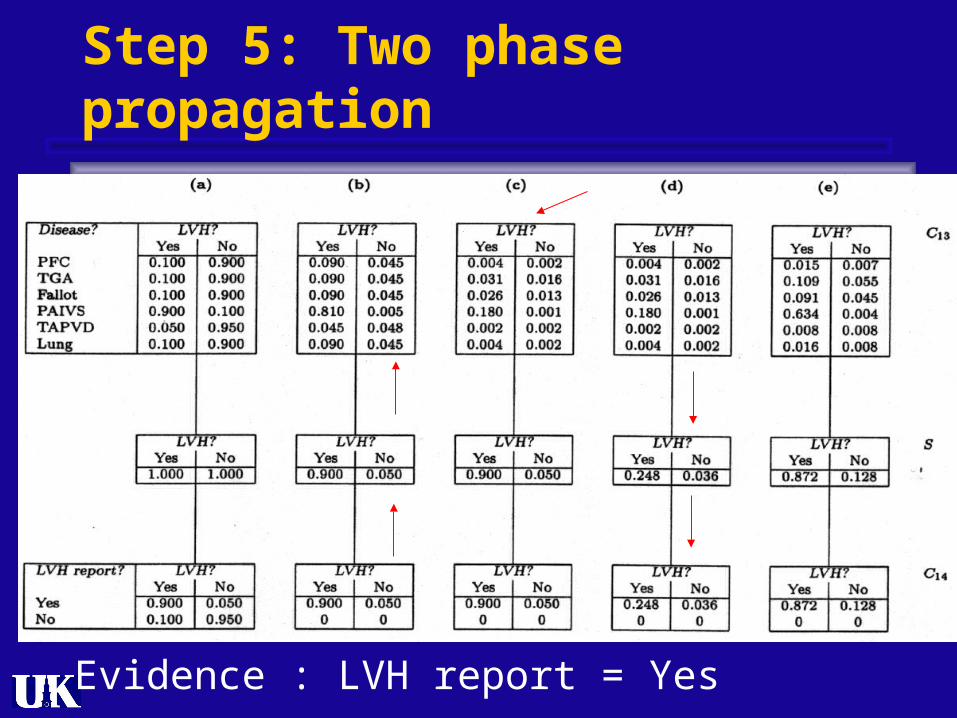
Step 5: Two phase propagation
Evidence : LVH report = Yes
Conclusions
Inference: marginals and MAP Elimination – one node at a time
Complexity is a function of the size of the largest clique
Triangulate that results into small cliques is NP-hard
Belief Propagation – all nodes, exact on trees Junction Tree
Decomposable graph Triangulated graph