evolutionary dynamics on graphs - icerm - home...evolutionary dynamics on graphs leslie ann...
TRANSCRIPT

Evolutionary Dynamics on Graphs
Leslie Ann Goldberg, University of Oxford
Absorption Time of the Moran Process (2014)with Josep Díaz, David Richerby and Maria Serna
Approximating Fixation Probabilities in The GeneralizedMoran Process (2012)
On the fixation probability of superstars (2013)also with George Mertzios and Paul Spirakis
Stochastic Graph Models, Brown University, March 2014
Evolutionary Dynamics on Graphs
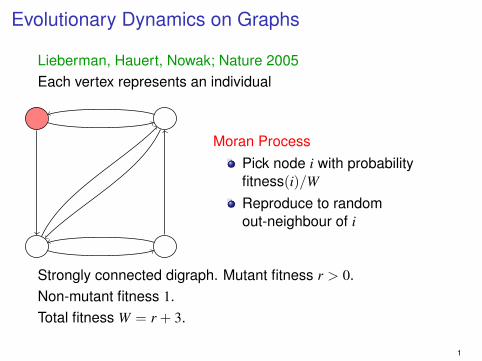
Lieberman, Hauert, Nowak; Nature 2005Each vertex represents an individual
Moran ProcessPick node i with probabilityfitness(i)/W
Reproduce to randomout-neighbour of i
Strongly connected digraph. Mutant fitness r > 0.Non-mutant fitness 1.Total fitness W = r + 3.
1

Initial Configuration:One mutant, chosen u.a.r.
Final Configurations (given strong connectivity):Extinction: No mutantsFixation: All mutants
2

Questions
1 What is the fixation probability of a graph? (exactly,bounds)
2 What is the expected absorption time?3 Computational Problem: Given a graph, compute its
fixation probability?
Fixation probability and expected absorption time dependon the graph topology and the mutant fitness.
Can be computed by solving a system of 2n linearequations!
3
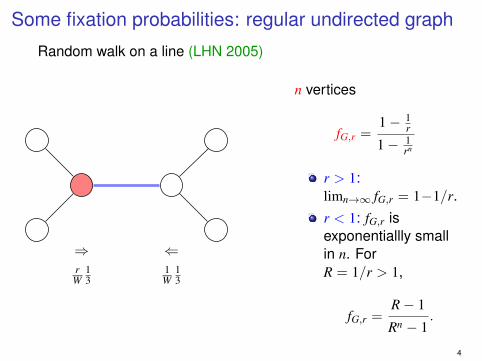
Some fixation probabilities: regular undirected graph
Random walk on a line (LHN 2005)
⇒rW
13
⇐1W
13
n vertices
fG,r =1− 1
r
1− 1rn
r > 1:limn→∞ fG,r = 1−1/r.r < 1: fG,r isexponentiallly smallin n. ForR = 1/r > 1,
fG,r =R− 1
Rn − 1.
4

The fixation probability of the star
Centre: quickly killed.Leaf: good.
Approximation of fG,r (for large n)
fG,r =1− 1
r2
1− 1r2n
∼ 1− 1r2 > 1− 1
r, for r > 1
(LHN 2005; Exact analysis: Broom, Rychtár Proc. Royal Soc. A2008) highest possible fixation prob?
5
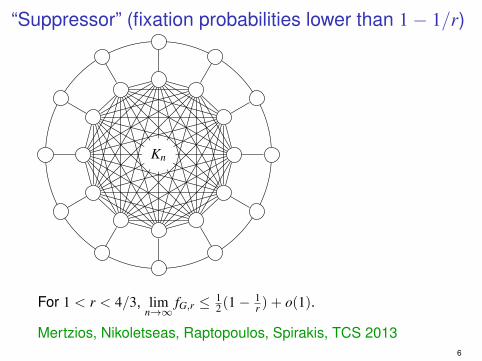
“Suppressor” (fixation probabilities lower than 1− 1/r)
Kn
For 1 < r < 4/3, limn→∞
fG,r ≤ 12(1− 1
r ) + o(1).
Mertzios, Nikoletseas, Raptopoulos, Spirakis, TCS 20136

Absorption time
Theorem When r > 1 and the initial single mutant is chosenuniformly at random, the absorption time of the Moran processon an n-vertex undirected graph G satisfies
E[τ ] ≤ rr−1 n4.
7
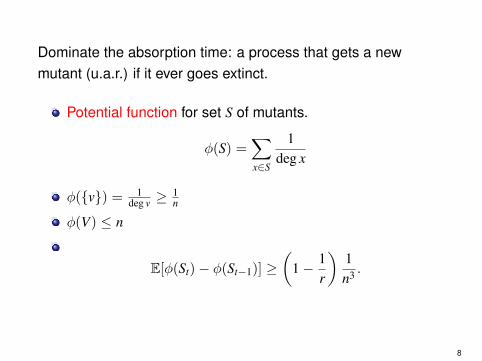
Dominate the absorption time: a process that gets a newmutant (u.a.r.) if it ever goes extinct.
Potential function for set S of mutants.
φ(S) =∑x∈S
1deg x
φ(v) = 1deg v ≥
1n
φ(V) ≤ n
E[φ(St)− φ(St−1)] ≥(
1− 1r
)1n3 .
8
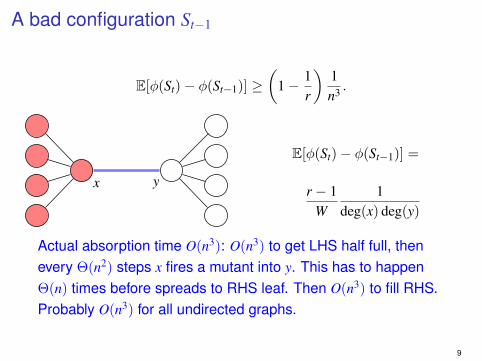
A bad configuration St−1
E[φ(St)− φ(St−1)] ≥(
1− 1r
)1n3 .
x y
E[φ(St)− φ(St−1)] =
r − 1W
1deg(x) deg(y)
Actual absorption time O(n3): O(n3) to get LHS half full, thenevery Θ(n2) steps x fires a mutant into y. This has to happenΘ(n) times before spreads to RHS leaf. Then O(n3) to fill RHS.Probably O(n3) for all undirected graphs.
9
Theorem When r < 1 and the initial single mutant is chosenuniformly at random, the absorption time of the Moran processon an n-vertex undirected graph G satisfies
E[τ ] ≤ 11−r n3.
Proof:
E[φ(Xi+1)− φ(Xi) | Xi = S] < −(
1− rn3
).
Now the process quickly goes exctinct.
10
Theorem When r = 1 and the initial single mutant is chosenuniformly at random, the absorption time of the Moran processon an n-vertex undirected graph G satisfies
E[τ ] ≤ φ(V(G))2n4 ≤ n6.
Martingale argument. At each step, probability that the potentialmoves is at least n−2. If the potential moves, it changes by atleast n−1. Study a process Zt, depending on t and φt, whichincreases in expectation until a stopping time when the processabsorbs. E[Zτ ] ≥ E[Z0], so we get bound on E[τ ].
11

Computational Problem: Given a graph, compute its fixationprobability.
FPRAS for a function f : A randomized algorithm g such that, forany input X and any ε ∈ (0, 1),
Pr(
(1− ε) f (X) ≤ g(X) ≤ (1 + ε) f (X))≥ 3
4.
The running time of g is at most poly(|X|, ε−1).
12
Corollary of absorption time bounds
For fixed r ≥ 1 there is an FPRAS for approximating thefixation probability.
For fixed r < 1 there is an FPRAS for approximating theextinction probability.
Ingredients: Tail bounds on absorption times via Markov’sinequality, upper and lower bounds on fixation probability.
For r < 1 we FPRAS extinction probability because wedon’t have a positive polynomial lower bound on thefixation probability
13
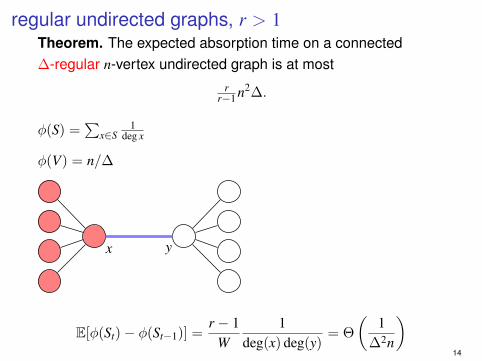
regular undirected graphs, r > 1Theorem. The expected absorption time on a connected∆-regular n-vertex undirected graph is at most
rr−1 n2∆.
φ(S) =∑
x∈S1
deg x
φ(V) = n/∆
x y
E[φ(St)− φ(St−1)] =r − 1
W1
deg(x) deg(y)= Θ
(1
∆2n
)14
Regular digraphs. r > 1.
indegree = outdegree = ∆
The fixation probability does not depend on the graph. Theprobability that the next reproduction happens along (u, v)
is rW
1∆ if u is a mutant and 1
W1∆ if u is not. There are exactly
as many edges from mutants to non-mutants as fromnon-mutants to mutants.
The expected number of “active steps” tends to n(1 + 1r ) as
n→∞. This does not depend on the graph (assumingregularity)
The expected absorption time does depend on the graph.
15

Theorem. The expected absorption time of the Moran processon a strongly connected ∆-regular n-vertex digraph G satisfies( r−1
r2
)n Hn−1 ≤ E[τ ] ≤ n2∆.
Hn is the n’th Harmonic number∑n
j=11j ∼ ln n.
16

The idea
Consider a Markov chain with state space 0, . . . , n + 1which starts at one (one mutant), has a rightward drift(corresponding to r), goes (deterministically) to state n + 1from states 0 and n (absorption) and from there to state 1(repeating the process). Let γk
j be the number of visits tostate j between visits to state k.
Solve recurrences to find E[γn+1j ], which is the expected
number of active steps when the Moran process has jmutants. This does not depend on the digraph. For every jit is between 1− 1/r2 and 1 + 1/r.
For the given digraph, find bounds on the expected amountof time that the process hovers at the (best/worst) j-mutantstate.
17
Use Wald’s equality to calculate the total amount of timespent with j mutants. The random variable giving the timethat you sit there is the same each time (or at least thebound is the same — use domination) and the number oftimes that you go there is independent of that.E[X1 + · · ·+ XN ] = E[N]E[X1].
Consequences
Undirected clique. Θ(n log n) (upper and lower bounds)
Undirected or directed cycle. Θ(n2) (upper and lowerbounds)
18

A connected ∆-regular undirected graph
The isoperimetric number of G is a discrete analog of theCheeger isoperimetric constant defined by Buser 1978.
i(G) = min|∂S||S|
∣∣∣ S ⊆ V(G), 0 < |S| ≤ |V(G)|2
,
where ∂S is the set of edges between vertices in S and verticesin V(G) \ S.
Corollary.E[τ ] ≤ 2∆ n Hn/i(G).
19
Consequences of E[τ ] ≤ 2∆ n Hn/i(G)
√n by
√n grid: E[τ ] = O(n3/2 log n)
i(G) = Θ(1/√
n)
hypercube E[τ ] = O(n log2 n)
i(G) = 1
For ∆ ≥ 3, almost all ∆-regular n-vertex undirected graphsG (as n tends to infinity) have O(n log n) expectedabsorption time.Bollobas: There is a positive number η < 1 such that , foralmost all ∆-regular n-vertex undirected graphs G (as ntends to infinity), i(G) ≥ (1− η)∆/2.
20
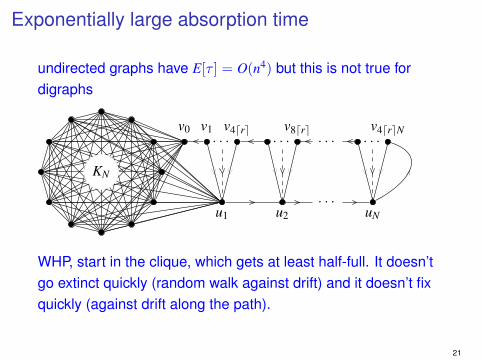
Exponentially large absorption time
undirected graphs have E[τ ] = O(n4) but this is not true fordigraphs
u1 u2· · ·
uN
v0 v1· · ·
v4dre· · ·
v8dre· · · · · ·
v4dreN
KN
WHP, start in the clique, which gets at least half-full. It doesn’tgo extinct quickly (random walk against drift) and it doesn’t fixquickly (against drift along the path).
21

Stochastic Domination
Conjecture. (Shakarian, Roos, Johnson, Biosystems 2012)Fixation probability is monotonic in r.
Intuitions
“The Moran process has a higher probability of reachingfixation from S than from some subset of S and it will do soin fewer steps.”
“Modifying the process by allowing all transitions thatcreate new mutants but forbidding some transitions thatremove mutants should make fixation faster and moreprobable.”
22
Domination
Goal. Couple the Moran process (Yt)t≥1 with another copy(Y ′t )t≥1 of the process where Y1 ⊆ Y ′1. The coupling would bedesigned so that Y1 ⊆ Y ′1 would ensure that Yt ⊆ Y ′t for all t > 1.
23

The snag
Y1 = 2 Y ′1 = 2, 3
W = r + 2; rr+2
12 To get left only r
2r+112
There is no coupling with Y2 ⊆ Y ′2.
When vertex 3 becomes a mutant it becomes more likely toreproduce so it “slows down” all of the other mutants in thegraph.
24
Continuous time processVertex v has fitness rv ∈ 1, r. Waiting time is exponentialwith parameter rv (independently of other vertices).Probability density function
f (t) =
rve−rvt, if t ≥ 0,0, otherwise.
Cumulative distribution function (probability of being ≤ t)
F(t) =
1− e−rvt, if t ≥ 0,0, otherwise.
The waiting time until the first vertex fires is exponentialwith parameter W =
∑v rv
The probability that v fires first is rv/W
The Moran process is recovered by taking the sequence ofconfigurations each time a vertex fires
25

Coupling Lemma
Let G = (V,E) be any digraph, let Y ⊆ Y ′ ⊆ V(G) and 1 ≤ r ≤ r′.Let Y[t] and Y ′[t] (t ≥ 0) be continuous-time Moran processeson G with mutant fitness r and r′, respectively, and with Y[0] = Yand Y ′[0] = Y ′. There is a coupling between the two processessuch that Y[t] ⊆ Y ′[t] for all t ≥ 0.
Consequence: If 0 < r ≤ r′ and S ⊆ S′ ⊆ V, thenfG,r(S) ≤ fG,r′(S′).
Proves conjecture and also gives subset domination: “addingmore mutants can’t decrease the fixation probability”
26
Using the domination
Recall that the expected absorption time of the Moranprocess on a strongly connected ∆-regular n-vertexdigraph G is at most n2∆.
For each ∆ > 2 we construct an infinite family ofconnected ∆-regular undirected graphs for which theexpected absorption time is Ω(n2).
27

∆− 2∆− 1
long cycle
gadget hangs off of each vertex
Prob(quickly extinct)≤ Prob(extinct)≤ 1r (regular)
Prob(quickly fix) is small.Domination: start with a cycle-vertex on (and possibly a vertex in its gadget)Domination: don’t turn cycle vertices offWe know how the cycle behaves!
28
Fixation probabilities: A lower bound for a stronglyconnected n-vertex digraph for r ≥ 1
fG,r ≥ fG,1 =1n
∑v∈V
fG,1(x) =1n
(The sum adds up to 1: Consider n different kinds of mutants —some will take over.)
(Recall that if r < 1 the clique has exponentially small fixationprobability, so there is no such polynomial lower bound)
29
An upper bound for a connected n-vertex undirectredgraph for r > 0
fG,r ≤ 1− 1n + r
(This is an upper bound on the probability that the first activestep creates a second mutant.)
Mertzios, Spirakis 2014 For any ε > 0,
fG,r ≤ 1− 1n3/4+ε
There are no known upper bounds that don’t depend on n eventhough we think the true upper bound is something like 1− 1/r(bounded below 1).
30

“Amplifiers”
c3,1
c3,2
c3,3x3,2x3,1
x3,mv
c1,3
c1,2
c1,1
x1,1
x1,2
x1,m
c2,3 c2,2
x2,m c2,1x2,2
x2,1
1
LHM 2005 Superstar Sk`,m. k is the “amplification factor” (chain
length k − 2, here 3), ` leaves (here 3), reservoir size m.
Claim: lim`,m→∞
fSk`,m,r
=1− r−k
1− r−kn .
31

k = 5
c3,1
c3,2
c3,3x3,2x3,1
x3,mv
c1,3
c1,2
c1,1
x1,1
x1,2
x1,m
c2,3 c2,2
x2,m c2,1x2,2
x2,1
1
Claim: lim`→∞
fSk`,m(`)
,r = 1− r−k
lim`→∞
fS5`,m(`)
,r ≤ 1− r + 12r5 + r + 1
= 1− 1Θ(r4)
< 1− r−5.
32
“Fixation probabilities on superstars, revisited andrevised”
Jamieson-Lane and Hauert, 22 Dec 2013
New claim: Let N ∼ `m(`) be the number of vertices.Taking k = (N)1/6 + 3
lim`→∞
fSk`,m(`)
,r ≥1
1 + 1(r2−r)12N
= 1− 1(r2 − r)12N
+ O(1/N2)
No rigorous proof
33