estimating the dispersion parameter of the negative ... · 1 estimating the dispersion parameter of...
TRANSCRIPT

1
Estimating the Dispersion Parameter of the Negative Binomial Distribution
for Analyzing Crash Data Using a Bootstrapped Maximum Likelihood
Method
Yunlong Zhang*, Ph.D., P.E. Assistant Professor
Zachry Department of Civil Engineering Texas A&M University
3136 TAMU College Station TX, 77843
Phone: (979)845-9902 Email: [email protected]
Zhirui Ye Graduate Research Assistant
Zachry Department of Civil Engineering Texas A&M University
3136 TAMU College Station, TX 77843
Phone (979) 845-1599 Email: [email protected]
Dominique Lord, Ph.D., P.E. Assistant Professor
Zachry Department of Civil Engineering Texas A&M University
3136 TAMU College Station, TX
77843-3136 Tel (979) 458-3949 Fax: (979) 845-6481
Email: [email protected]
Nov. 14, 2006
*Corresponding Author Word Count: 4340+ (7 Tables and Figures)*250 = 6090

2
ABSTRACT
The objective of this study is to improve the estimation of the dispersion parameter of the
negative binomial distribution for modeling motor vehicle collisions. The negative binomial
distribution is widely used to model count data such as traffic crash data, which often exhibit low
sample mean values and small sample sizes. Under such situations, the most commonly used
methods for estimating the dispersion parameter, the method of moment and the maximum
likelihood estimate, may become inaccurate and unstable. A bootstrapped maximum likelihood
estimate is proposed to improve the estimation of the dispersion parameter. The proposed
method combines the technique of bootstrap resampling with the maximum likelihood estimation
method to obtain better estimates of the dispersion parameter. The performance of the
bootstrapped maximum likelihood estimate is compared with the method of moment and the
maximum likelihood estimates through Monte Carlo simulations. To validate the simulation
results, the methods are applied to observed data collected at 4-legged unsignalized intersections
in Toronto, Ont. Overall, the results show that the proposed bootstrap maximum likelihood
method produces smaller biases and more stable estimates. The improvements are more
pronounced with small samples and low sample means.
Key words: Crash Data; Dispersion Parameter; Negative Binomial Distribution; Bootstrap;
Resampling; Method of Moments; Maximum Likelihood; Monte Carlo Simulations

3
INTRODUCTION
To analyze crash data in traffic safety analysis, statistical distributions are often used to fit the
data. It is often assumed that the distribution of crash counts at a given site follows a Poisson
distribution, which only has one parameter and its mean and variance are the same. The Poisson
distribution has been shown to be reasonable to model crash data at a given one site, as discussed
by Nicholson and Wong (1). In reality, crash data over a series of sites often exhibit a large
variance and a small mean, and display overdispersion with a variance-to-mean value greater
than 1 (2). For this reason, the negative binomial distribution, also known as the Poisson-
Gamma distribution, has become the most commonly used probabilistic distribution for
modeling crashes at a series of sites (3, 4, 5, 6). The negative binomial distribution is considered
to be able to handle overdisperson better than other distributions and has been widely used in
many fields in addition to traffic safety, such as entomology (7, 8), zoology (9), bacteriology
(10), and biology (2, 11). In addition, the closed form of this distribution is very easy to
manipulate (i.e., estimating the mean and variance).
The negative binomial distribution has two parameters: the mean u and the shape
parameter or the dispersion parameter k , which is commonly considered to be fixed (4, 12), to
measure overdispersion. For a sample of counts X that fits a negative binomial distribution
( ~ ( , )X NB u k ), the variance of the distribution is kuu /2+ . The probability that the variable
X takes the value x is
( )Pr[ ] ( ) (1 )! ( )
( 1)( 2) ( 1) ( ) (1 ) , u,k 0, x 0,1,2,...!
x k
x k
x k u uX xx k u k k
x k x k k k u ux u k k
−
−
Γ += = +
Γ ++ − + − ⋅⋅⋅ +
= + > =+

4
where )(⋅Γ denotes the gamma function defined by ∫∞
−−=Γ0
1)( dttez zt (13). In some literatures,
the dispersion parameter is denoted by the variable ka /1= , and k is called the inverse
dispersion parameter.
From the probability density function of the negative binomial distribution, it can be seen
that k is an essential part of the model. Estimation of k is thus important given a sample of
counts. In traffic safety studies, the importance of an accurate estimate of k has been addressed
(4). For example, k is a critical parameter for developing confidence intervals and refining the
predicted mean when the Empirical Bayes (EB) is used (14, 5). The importance of the dispersion
parameter in highway safety analyses is further discussed in some other references (5, 15, 16).
Several estimators have been proposed to estimate the dispersion parameter (or its
inverse). The simplest method to estimate k is the Method of Moments Estimate (MME) (17).
The Maximum Likelihood Estimate (MLE) method, first proposed by Fisher (9) and later
developed by Lawless (18) with the introduction of gradient elements, is also commonly used.
More recently, Clark and Perry ( 19 ) introduced the Maximum Quasi-Likelihood Estimate
(MQLE), which is considered to be an extension of the MME. A method of multistage
estimation was also presented in (11). Among these methods, the MME and the MLE are often
considered to be superior to other methods and are more widely used nowadays.
As reported in several traffic safety literatures (4, 20, 21, 22), crash data often have the
characteristic of having a low sample mean, which causes the so-called Low Mean Problem
(LMP). The LMP in a negative binomial distribution seriously affects the estimation of the
dispersion parameter (4), especially when combined with small sample sizes, which are also
common for crash data as researchers and practitioners are usually unable to collect a large
quantity of data due to prohibitively high costs and other limited conditions (23, 24, 25). The

5
problem of low sample means combined with small sample sizes has been the focus of several
studies in other fields. For instance, in a biological study (11), it is stated that both the MME and
the MLE have difficulties estimating the parameter k when u is small and k is large, and under
such situations both estimators tend to overestimate and are unstable. Clark and Perry (19)
compared the MME and the MQLE and found that both estimators become biased and unstable
when the mean value ( u ) is less than 3.0 and the sample size ( n ) is small. Piegorsch (26)
reported that both the MLE and the MQLE generated biased estimates when the sample size is
50. A recent study of modeling micro-organisms (27) showed that the MLE had unstable
estimates when the sample size became small and the mean is low. Superior estimators than
MME and MLE for LMPs are desirable but are not found in the current literature.
The objective of this paper is to improve the estimation of the common k under low
sample mean and small sample size situations. The rest of this paper is organized as follows. The
two commonly used estimation methods, the MME and the MLE, are first reviewed. A new
method—the Bootstrapped Maximum Likelihood Estimate (BMLE) is then proposed in order to
improve the estimation performance. Monte Carlo Simulations are conducted to show the
performances of MME, MLE, and BMLE. Finally, all three methods are used to model observed
crash data and their performances are again compared and discussed.
ESTIMATORS OF k
This section describes the estimators of the dispersion parameter. The Bootstrapped maximum
likelihood estimator is proposed to improve upon methods of moments and maximum likelihood
estimates with the low mean problem.

6
Method of Moments Estimate
For a negative binomial distribution, the variance σ2, mean u and k have the relationship
kuu /22 +=σ . Based on this relationship, the MME is developed and estimated by
2
2ˆ xk
s x=
− (1)
where x and 2s are the first and second unbiased sample moments (17). Note that the estimate
k is reasonable only when 2s x> because 0>k (11).
To obtain a good estimate of k by MME (Equation 1), it is very important to have a good
knowledge of the variance because even a slight change of the variance may cause a large
variation of k . This problem will be enlarged when the sample size becomes smaller.
Maximum Likelihood Estimate
As shown by Fisher (9), the log-likelihood function from a sample of independent identically
distributed (i.i.d.) variates ( ix ’s) is proportional to
1
( )1( , ) log{ } log{ } ( ) log{1 / }( )
ni
i
x kl k u x u x k u kn k=
Γ += + − + +
Γ∑ .
where u is again the mean of the negative binomial distribution. The sample variates are integers
in practice, which yields ( ) / ( ) ( 1)( 2) ( 1)x k k x k x k k kΓ + Γ = + − + − ⋅⋅⋅ + . The term
( )log{ }( )ix kk
Γ +Γ
then can be written as 1
0
( )log{ } log{1 / }( )
ixi
v
x k k v kk
−
=
Γ += +
Γ ∑ without call to the
gamma function (18). Thus, the log-likelihood function can finally be expressed by
1
1 0
1( , ) log{1 / } log( ) ( ) log{1 / }ixn
i vl k u k v k x u x k u k
n
−
= =
= + + − + +∑∑ with gradient elements
7
1 /1 /u
x x klu u k
+∇ = −
+ and
12
1 0
1 ( )log{1 / }1 / 1 /
ixn
ki v
v u x kl k u kn v k u k
−
= =
+∇ = + + −
+ +∑∑ . From the gradient
elements, setting 0=∇ lu yields u x= . Then the MLE of k can be obtained via a nonlinear
root-finder by setting 0=∇ lk and given uu ˆ= .
It is assumed in the MLE that ˆˆ 1/a k= is continuous (at least approximately). However,
this is not always the case for small samples. The reality is that the distribution of a exhibits a
relatively discrete nature for small n (26). Because of this, MLE can generate unstable estimates
for small samples.
BOOTSTRAPPED MAXIMUM LIKELIHOOD ESTIMATOR OF k
The LMP can be solved by increasing the sample size but that is usually infeasible to do in
practice as in the case with crash data. This paper intends to look for an alternative estimation of
k that performs better with low sample means and small samples, and we turn to the bootstrap
resampling technique, which is recommended as a remedy when the sample size is small (28).
The bootstrap technique was proposed by Efron (29, 30, 31) and further developed by
Efron and Tibshirani (32). The idea of bootstrap resampling is introduced as follows. Let
nxxx ,...,, 21 be a sample of data, which are the outcomes of i.i.d. random variables nXXX ,...,, 21
with probability density function f and cumulative distribution function F . The sample is thus
used to make inferences about a population characteristic θ . If we put equal probabilities n/1 at
each sample value ix , then the corresponding estimate of F is the empirical distribution
function (EDF) F . The idea of bootstrap resampling from F is introduced from a “real world”
to the “bootstrap world”, as shown in Figure 1 (32). Drawing a sample },...,,{ **2
*1
*nXXX=χ
from F with replacements is called the bootstrap resample and resampling from F is referred to

8
as the nonparametric bootstrap. In reality, a large number of resamples, such as 200 or more,
need to be drawn to achieve robust estimates of inferences. In this way, the distribution of θ can
be approximated by the distribution of *θ .
The bootstrap has several good features in dealing with small sample problems. First,
unlike the classic procedures, the bootstrap does not rely on theoretical distributions and thus
does not require strong assumptions of the sample and the distribution. This is a nice attribute
since it is usually difficult to obtain accurate parameters for a certain distribution given small
samples. Moreover, by bootstrapping, the original sample is duplicated many times. Hence, the
bootstrap can treat a small sample as the virtual population and generate more observations from
it. Finally, the bootstrap is a rather simple technique and does not require a sophisticated
mathematical background for people to use it. Because of those strengths, the bootstrap
techniques have been widely applied to many engineering areas and applications, including radar
and sonar signal processing, geophysics, biomedical engineering, imaging processing, control,
and environmental engineering(33). The bootstrap techniques are widely used for estimating
statistical features including bias (34, 35), variance (36, 37), hypothesis testing (38, 39), and
confidence interval (40, 41).
The proposed BMLE method to estimate the fixed k values of negative binomial
distributions under low sample mean and small sample size conditions has the maximum
likelihood estimation nested inside. The BMLE algorithm is shown in the following steps:
Step 1: Data collection. Collect data into 1 2{ , ,..., }nX X Xχ = , then construct the
empirical distribution function F , which puts equal mass 1/ n at each observation:
1 1 2 2 n n, X = x , ..., X = xX x= .

9
Step 2: Resampling. Draw a random sample of size n with replacements from F :
* * *1 2* { , ,..., }nX X Xχ = . Calculate the variance and mean of the resample *χ . If the variance is
less than or equal to the mean, redraw *χ .
Step 3: Calculation of the bootstrap estimate. Calculate the bootstrap estimate of *k from
*χ using the maximum likelihood method.
Step 4: Iteration. Repeat steps 2 and 3 B times to obtain b estimates of *k :
* * *1, 2, ,, ,...,b b b bk k k .
Step 5: Estimation of k . Sort the b estimates of *k , then k is approximated by the
median value of * * *1, 2, ,, ,...,b b b bk k k .
In step 5, the median value is used instead of the mean as the estimate of k because the
median value is less sensitive to the skewness of the distribution of * * *1, 2, ,, ,...,b b b bk k k .
SIMULATIONS AND RESULTS
Monte Carlo simulations are conducted to show the performance and applicability of the BMLE
under low sample mean and small sample size situations. Also, estimated results from MME,
MLE, and BMLE are compared to investigate their relative performances. The simulation
procedure is as follows.
Step 1: Generate a sample 1 2{ , ,..., }nX X Xχ = with size n from the negative binomial
distribution ~ ( , )X NB u k . Calculate the variance and mean of the sample, regenerate χ if the
variance to mean value is less than or equal to 1.

10
Step 2: Calculate the estimate of k from χ , using MME, MLE, and BMLE respectively.
For the BMLE, a fixed number of resampling 499B = is used (500 samples counting the
original one).
Step 3: Repeat steps 1 and 2 until r estimates of k are obtained.
In the simulations, wide but practical ranges of the parameters are considered as follows:
u : 0.75, 1, 1.5, and 2 respectively.
k : 1, 2, 3, and 4 for each u .
n : may take values of 20, 50, 100, 200, 500, and 1000, and varies according to
the performances of those three estimators.
r : 1000 times.
During the simulation, a sample was discarded if an estimate failed to converge. As in the
study by Wilson et al. (11), we set upper and lower limits of 1000 and 0.001 on the dispersion
parameter for the MLE. Thus, estimates by the MLE that exceed the upper and lower limits are
discarded, and corresponding estimates by the MME and BMLE are also removed. Those
estimates are not counted in r .
Simulations were realized through the Matlab software, which provides both the
resampling and the maximum likelihood algorithms. Other software programs such as SAS,
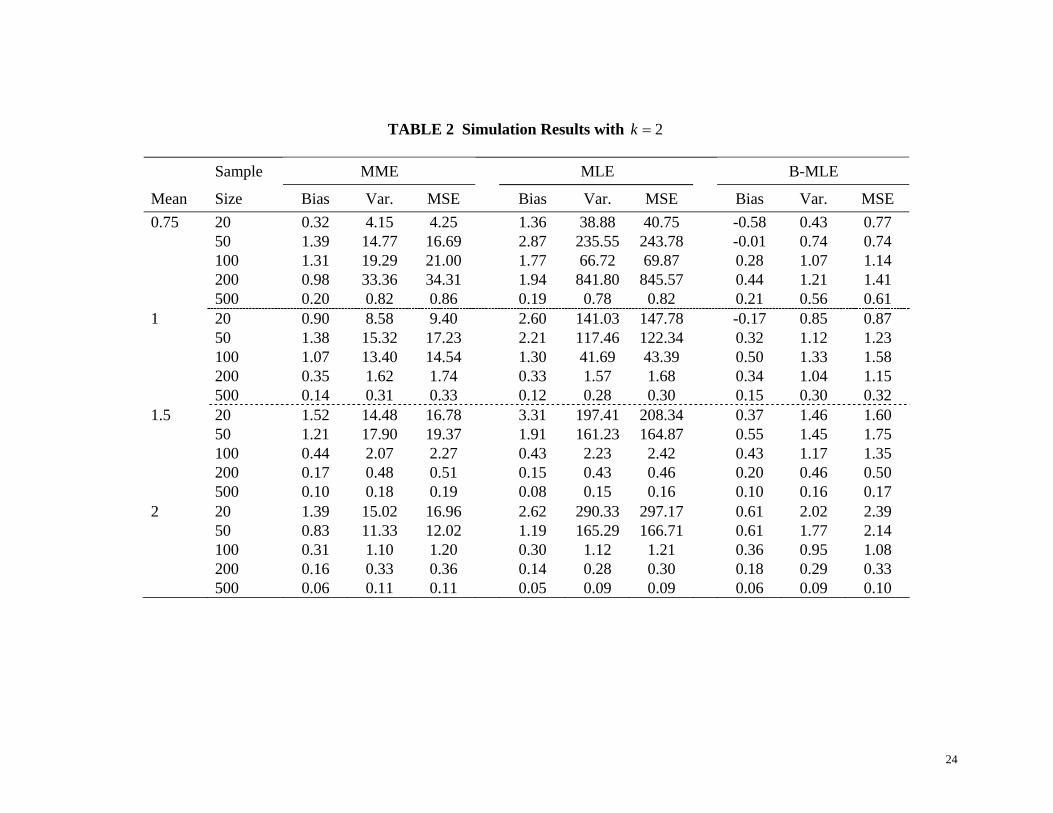
GenStat, and Rgui can also be used for such work. Simulation results are shown in Tables 1
through 4 with different parameter settings. k values in the tables are set to 1, 2, 3, and 4
sequentially. Bias, variance, and the Mean Square Error (MSE) of estimates from r simulation
runs are used for comparing the performances of the three estimators. The bias measures the
difference between the true value and the average of all estimates ( kkEkbias −= ]ˆ[)ˆ( ); the

11
variance measures the spread of the estimates about the mean of all estimates
( ]])ˆ[ˆ[( 22ˆ kEkEk
−=σ ); and the MSE is calculated by 2ˆ
2))ˆ((k
kbiasMSE σ+= .
It is interesting to note that the performances of those estimators not only depend on the
sample mean and sample size, but also rely highly on the k value. Through comparing the four
tables, it can be seen that with a fixed sample mean and a fixed sample size, the increase of k
deteriorates estimation performances as shown by the increasing values for bias, variance, and
MSE from table to table, especially for the MME and the MLE. This agrees with Willison’s (11)
and Lord’s (42) conclusions. When the k value is low, for example, 1k = , for 1u = , the MME
and the MLE can have relatively accurate estimations when the sample size is as low as 100
(MSEs of 0.48 and 0.42 for MME and MLE, respectively). While with 4k = , the sample size
has to be more than 1000 to obtain reasonably stable and accurate estimations. At sample size of
500, MSEs are still as large as 18.80 and 20.71 for MME and MLE, respectively. The BMLE, on
the other hand has superior estimates. Even when 4k = ( 1u = ), it can still deliver relatively
accurate and stable estimations for the sample size of 100, with a very good MSE at only 2.26,
comparing with MSEs of 62.46 and 396.76 for MME and MLE. To better illustrate the
performances of those three methods, three boxplots of estimates are shown in Figure 2, with
1 ,4 == uk and 200n = . From the figure, while the three boxplots have almost identical median
values around 4, the boxplot of the BMLE has the shortest inter-quartile range (IQR), the range
between the 25th and the 75th percentiles ( 13 QQIQR −= ), indicated by the shorter box. Outliers
of the BMLE, as defined as those that are beyond IQRQ *5.13 + , are much closer to the median
value and they are much fewer in number as compared with MME and MLE. Note that some
outliers in the boxplots of the MME and the MLE are not displayed since they are further out
from the median value and clear differences in performances have already been displayed.

12
Tables 1 through 4 also show that generally the MME has smaller bias and variance than
the MLE with relatively small samples. This agrees with the conclusion stated by Pieters et al.
(43). The MME is also less likely to have large overestimations. Only at large sample sizes, the
MLE is slightly better than the MME and about the same as the BMLE. This demonstrates that
the MLE is only suitable for large samples, but may still be unstable under low mean and high k
conditions. The BMLE outperforms the MME in all sample size scenarios. It also outperforms
the MLE in almost all cases except a few in which the sample sizes are very large. For those
limited number of cases the performance of the BMLE is about the same as that of the MLE. The
tables clearly show that the BMLE is much more robust in estimating k under low sample mean
conditions. The BMLE does need more expensive computations, but with the development of
modern computing capabilities this problem can be almost neglected.
APPLICATION WITH OBSERVED CRASH DATA
A crash count dataset is used as an example to show different performances of the three
estimators. The sample dataset was collected from 4-legged unsignalized intersections in
Toronto, Ontario (44), with the initial objective of developing statistical models for predicting
safety performance of these intersections. It was later used to fit negative binomial models (4).
Fatal and non-fatal injuries are included in this dataset. There are 354 observations, and the
sample has a mean value of 1 and a variance-to-mean of 1.28. The maximum and minimum
values of this sample are 5 and 0, respectively. Like in Lord’s study (4), we assume no spatial or
temporal correlation between those observations for simplicity and use the dataset to examine the
effects of low sample means and small sample sizes on different estimators. By randomly
selecting observations from the dataset, we can obtain subsamples with different sample sizes.

13
The three estimators were firstly used to estimate the k parameter for the full dataset.
Then, the full dataset was treated as the sample population and subsamples were generated from
it. 1000 subsamples, with sample sizes of 50, 100, and 200 respectively, were generated. These
subsamples were drawn with overdispersion ( xs >2 ) to fit negative binomial distributions. The
k values were estimated by the three estimators. Results of the statistics are shown in Table 5.
For sample sizes of 50, 100, and 200, the mean values in Table 5 are averages of estimation from
1000 subsamples. For the BMLE method, 499 resamples are drawn from each subsample.
For the full dataset, all the estimated k values are between 3 and 4, suggesting the k
value should be somewhere between 3 and 4. The estimated k values from the MLE and BMLE
are close, which is a conclusion similar to one reached from simulations with large sample size
and also suggesting the k value should be around 3.3. For the subsamples with different smaller
sample sizes, it is again found that both the MME and the MLE are unstable with large
estimation variance while the BMLE has small variance of estimation. From Tables 3 and 4, it
can be inferred that with a k value between 3 and 4 and 1=u , the BMLE tends to slightly
underestimate k with the fixed sample size of 50, and slightly overestimate k with the fixed
sample size of 200, while the other two estimators tend to overestimate the k value by a larger
margin under both scenarios. These phenomena seem to be very well identified by this example:
the MME and MLE estimated k at values from 4.55 to 6.38, significantly high than the 3 to 4
range; while for the BMLE it seemed to underestimate k at 2.95 with sample size of 50 and
slightly overestimate it at 3.85 with the sample size of 200. Table 5 again shows that the BMLE
produces more accurate estimations and also with much smaller spread when sample sizes are
small. Table 5 results also show the good stability of the BMLE method as the estimated mean
and variance do not differ too much for different sample sizes.

14
CONCLUSIONS
Crash count data for safety analysis tend to display the character of overdispersion and
the negative binomial distribution is widely used as the model to fit the data. In practice, crash
count data are often characterized by low sample mean values and small sample sizes, which
make accurate and robust estimation of the dispersion parameter difficult to achieve using the
most common methods.
To improve the estimation of the dispersion parameter for data with low sample mean
and small sample sizes, this paper proposed a new method, the bootstrapped maximum
likelihood estimate, which combines the maximum likelihood method with the bootstrapping
resampling technique. Various Monte Carlo simulations of the negative binomial distributions
with low sample means are conducted, and the results show that the proposed estimator produces
the most accurate and stable estimates. In the end, the superiority of the proposed estimator is
demonstrated using observed crash count dataset.
This research only focuses on estimation of the dispersion parameter of the negative
binomial distribution. Further work should be conducted to expand the proposed bootstrapped
maximum likelihood estimate for negative binomial regression models that include covariates.

15
REFERENCE
1 Nicholson, A., and Y. Wong. Are Accidents Poisson distributed? A Statistical Test. Accident
Analysis and Prevention, Vol.25, No. 1, pp. 91-97, 1993.
2 Bliss, C.I., and R.A. Fisher. Fitting the Negative Binomial Distribution to Biological Data
and Not on the Efficient Fitting of the Negative Binomial. Biometrics 9, pp. 176-200, 1953.
3 Poch, M., and F.L. Mannering. Negative Binomial Analysis of Intersection Accident
Frequency. Journal of Transportation Engineering, Vol. 122, No. 2, pp.105-113, 1996.
4 Lord, D. Modeling Motor Vehicle Crashes using Poisson-Gamma Models: Examining the
Effects of Low Sample Mean Values and Small Sample Size on the Estimation of the Fixed
Dispersion Parameter. Accident Analysis & Prevention, Vol. 38, No. 4, pp. 751-766, 2006.
5 Hauer, E. Observational Before-After Studies in Road Safety: Estimating the Effect of
Highway and Traffic Engineering Measures on Road Safety. Oxford, England: Pergamon
Press, Elsevier Science Ltd, 1997.
6 Washington, S.P., M.G. Karlaftis, and F.L. Mannering. Statistical and Econometric Methods
for Transportation Data Analysis. Chapman & Hall CRC, 2003.
7 Taylor, L.R. Aggregation, Variance, and the Mean. Nature189, pp. 732-735, 1961.
8 Bliss, C.I., and A.R.G. Owen. Negative Binomial Distributions with a Common k.
Biometrika, Vol. 45, No. 1/2, pp. 37-58, 1958.
9 Fisher, R.A. The Negative Binomial Distribution. Annals of Eugenics 11, pp. 182-187, 1941.
10 Neyman, J. On a New Class of ‘Contagious’ Distributions, Applicable in Entomology and
Bacteriology. Annals of Mathematical Statistics 10, pp. 35-57, 1939.
11 Willson, L.J., J.L. Folks, and J.H. Young. Multistage Compared with Fixed-Sample-Size
Estimation of the Negative Binomial Parameter k. Biometrics, Vol. 109-117, 1984.

16
12 Bliss, C.I., and A.R.G. Owen. Negative Binomial Distributions with a Common k.
Biometrika, Vol. 45, No. ½, pp. 37-58, 1958.
13 Anscombe, F.J. Sampling Theory of the Negative Binomial and Logarithmic Series
Distributions. Biometrika 37, pp.358-382, 1950.
14 Wood, G.R. Confidence and Prediction Intervals for Generalized Linear Accident Models.
Accident Analysis & Prevention, Vol. 37, No. 2, pp. 267-273, 2005.
15 Hauer, E. Overdispersion in Modelling Accidents on Road Sections and in Empirical Bayes
Estimation. Accident Analysis & Prevention, Vol. 33, No. 6, pp. 799-808, 2001.
16 Persaud, B., and C. Lyon. Empirical Bayes before–after safety studies: Lessons learned from
two decades of experience and future directions. Accident Analysis & Prevention, 2006, in
press.
17 Anscombe, F.J. The Statistical Analysis of Insect Counts Based on the Negative Binomial
Distributions. Biometrics 5, pp. 165-173, 1949.
18 Lawless, J.F. Negative Binomial and Mixed Poisson Regression. The Canadian Journal of
Statistics 15, pp. 209-225, 1987.
19 Clark, S.J., and J.N. Perry. Estimation of the Negative Binomial Parameter k by Maximum
Quasi-Likelihood. Biometrics 45, pp. 309-316, 1989.
20 Maycock, G., and R.D. Hall. Accidents at 4-Arm Roundabouts. TRRL Laboratory Report
1129. Transportation and Road Research Laboratory, Crowthorne, Bershire, 1984.
21 Fridstrom, L.J.I., S. Ingebrigtsen, S.R. Kulmala, and L.K. Thomsen. Measuring the
Contribution of Randomness, Exposure, Weather, and Daylight to the Variation in Road
Accident Counts. Accident Analysis and Prevention, Vol. 27, No. 1, pp. 1-20, 1995.

17
22 Maher, M.J., and I. Summersgill. A Comprehensive Methodology for the Fitting Predictive
Accident Models. Accident Analysis and Prevention, Vol. 28, No. 3, pp. 281-296, 1996.
23 Kumara, S.S.P., H.C. Chin, and W.M.S.B. Weerakoon. Identification of Accident Causal
Factors and Prediction of Hazardousness of Intersection Approaches. Transportation
Research Record 1840, pp. 116- 122, 2003.
24 Oh, J., C. Lyon, S.P. Washington, B.N. Persaud, and J. Bared. Validation of the FHWA Crash
Models for Rural Intersections: Lessons Learned. Transportation Research Record 1840, pp.
41-49, 2003.
25 Lord, D., and J.A. Bonneson. Calibration of Predictive Models for Estimating the Safety of
Ramp Design Configurations. Transportation Research Record 1908, pp. 88-95, 2005.
26 Piegorsch, W.W. Maximum Likelihood Estimation for the Negative Binomial Dispersion
Parameter. Biometrics 46, pp. 863-867, 1990.
27 Toft, N., G.T. Innocent, D.J. Mellor, and S.W.J. Reid. The Gamma-Poisson Model as a
Statistical Method to Determine if Micro-Organisms are Randomly Distributed in a Food
Matrix. Food Microbiology, Vol. 23, No. 1, pp. 90-94, 2006.
28 Diaconis, P., and B. Efron. Computer-intensive Methods in Statistics. Scientific American, pp.
116-130, 1983.
29 Efron, B. Bootstrap Methods: Another Look at the Jackknife. The Annals of Statistics 7, pp.
1-26, 1979.
30 Efron, B. Nonparametric Estimates of Standard Error: The Jackknife, the Bootstrap and
Other Methods. Biometrika 63, pp.589-599, 1981.
31 Efron, B. The Jackknife, the Bootstrap, and Other Resampling Plans. Society of Industrial and
Applied Mathematics CBMS-NSF Monographs 38, 1982.

18
32 Efron, B., and R.J. Tibshirani. An Introduction to the Bootstrap. New York: Chapman & Hall,
1993.
33 Zoubir, A.M., and D.R. Iskander. Bootstrap Techniques for Signal Processing. Cambridge
University Press, 2004.
34 Politis, D.N. Computer-Intensive Methods in Statistical Analysis. IEEE Signal Processing
Magazine 15, pp. 39-55, 1998.
35 Tamstorf, R., and H.W. Jensen. Adaptive Sampling And Bias Estimation in Path Tracing. In
“Rendering Techniques’97.” Eds. J. Dorsey and Ph. Slusallek. Springer-Verlag. Pp. 285-295,
1997.
36 Rosychuk, R., X. Sheng, and J.L. Stuber. Comparison of Variance Estimation Approaches in
a Two-State Markov Model for Longitudinal Data with Misclassification. Statistics in
Medicine, Vol. 25, No. 11, pp. 1906-1921, 2006.
37 Yeo, D, H. Mantel, and T.P.Liu. Bootstrap Variance Estimation for the National Population
Health Survey. Proceedings of the Annual Meeting of the American Statistical Association,
Survey Research Methods Section, August 1999. Baltimore: American Statistical
Association, 1999.
38 Zoubir, A. M. Multiple Bootstrap Tests and Their Application. In Proceedings of the IEEE
International Conference on Acoustics, Speech and Signal Processing (ICASSP) VI, pp. 69-
72, Adelaide, Australia, April 1994.
39 Hall, P., S.R. Wilson. Two Guidelines for Bootstrap Hypothesis Testing. Biometrics 47, pp.
757-762, 1991.
40 Fisher, N.I., and P. Hall. Bootstrap Confidence Regions for Directional Data. Journal of the
American Statistical Society 84, pp. 996-1002, 1989.

19
41 Reid, D.C., A.M. Zoubir, and B. Boashash. The Bootstrap Applied to Passive Acoustic
Aircraft Parameter Estimation. In: Proceedings ICASSP '96, Atlanta, pp. 3154~3157, 1996.
42 Lord, D., and L.F. Miranda-Moreno. Effects of Low Sample Mean Values and Small Sample
Size on the Estimation of the Fixed Dispersion Parameter of Poisson-gamma Models for
Modeling Motor Vehicle Crashes: A Bayesian Perspective. Presented at the 86th Annual
Meeting of the Transportation Research Board, Washington, D.C., 2006.
43 Pieters, E.G., C.E. Gates, J.H. Matis, and W.L. Sterling. Small Sample Comparisons of
Different Estimators of Negative Binomial Parameters. Biometrics 33, pp. 718-723, 1977.
44 Lord, D. The Prediction of Accidents on Digital Networks: Characteristics and Issues Related
to the Application of Accident Prediction Models. Ph.D. Dissertation, Department of Civil
Engineering, University of Toronto, Toronto, Ontario, 2000.
20
LIST OF FIGURES
FIGURE 1 The bootstrap approach (Efron and Tibshirani, 1993). ................................. 21
FIGURE 2 Boxplot of estimates with 1 ,4 == uk and 200n = ..................................... 22
LIST OF TABLES
TABLE 1 Simulation Results with 1k = .......................................................................... 23
TABLE 2 Simulation Results with 2k = ........................................................................ 24
TABLE 3 Simulation Results with 3k = ......................................................................... 25
TABLE 4 Simulation Results with 4k = ......................................................................... 26
TABLE 5 Estimation Results of the k Parameter for Crash Count Data ........................ 27

21
FIGURE 1 The bootstrap approach (Efron and Tibshirani, 1993).

22
FIGURE 2 Boxplots of estimates with 1 ,4 == uk and 200n = .

23
TABLE 1 Simulation Results with 1k =
MME MLE BMLE
Mean Sample Size Bias Var. MSE Bias Var. MSE Bias Var. MSE
0.75 20 0.69 2.60 3.09 1.11 17.78 19.01 0.14 0.39 0.41 50 0.88 7.70 8.47 1.55 110.69 113.1 0.28 0.46 0.54 100 0.26 0.82 0.89 0.23 0.97 1.02 0.21 0.30 0.34 200 0.14 0.21 0.23 0.11 0.18 0.19 0.13 0.18 0.20 1 20 0.85 3.86 4.58 1.34 23.91 25.70 0.30 0.56 0.65 50 0.59 3.36 3.71 0.64 14.33 14.74 0.36 0.51 0.63 100 0.21 0.43 0.48 0.18 0.39 0.42 0.20 0.26 0.31 200 0.09 0.12 0.13 0.07 0.09 0.10 0.09 0.10 0.11 1.5 20 0.76 3.53 4.11 1.05 27.81 28.91 0.43 0.68 0.86 50 0.35 2.35 2.48 0.43 31.99 32.17 0.28 0.43 0.51 100 0.14 0.16 0.18 0.11 0.13 0.14 0.14 0.14 0.16 200 0.06 0.07 0.07 0.05 0.05 0.05 0.06 0.05 0.06 2 20 0.69 3.22 3.69 0.76 7.81 8.39 0.52 0.94 1.21 50 0.22 0.41 0.46 0.17 0.34 0.37 0.22 0.33 0.38 100 0.12 0.11 0.13 0.09 0.09 0.09 0.11 0.09 0.11 200 0.05 0.05 0.05 0.03 0.04 0.04 0.04 0.04 0.04
24
TABLE 2 Simulation Results with 2k =
Sample MME MLE B-MLE
Mean Size Bias Var. MSE Bias Var. MSE Bias Var. MSE 0.75 20 0.32 4.15 4.25 1.36 38.88 40.75 -0.58 0.43 0.77 50 1.39 14.77 16.69 2.87 235.55 243.78 -0.01 0.74 0.74 100 1.31 19.29 21.00 1.77 66.72 69.87 0.28 1.07 1.14 200 0.98 33.36 34.31 1.94 841.80 845.57 0.44 1.21 1.41 500 0.20 0.82 0.86 0.19 0.78 0.82 0.21 0.56 0.61 1 20 0.90 8.58 9.40 2.60 141.03 147.78 -0.17 0.85 0.87 50 1.38 15.32 17.23 2.21 117.46 122.34 0.32 1.12 1.23 100 1.07 13.40 14.54 1.30 41.69 43.39 0.50 1.33 1.58 200 0.35 1.62 1.74 0.33 1.57 1.68 0.34 1.04 1.15 500 0.14 0.31 0.33 0.12 0.28 0.30 0.15 0.30 0.32 1.5 20 1.52 14.48 16.78 3.31 197.41 208.34 0.37 1.46 1.60 50 1.21 17.90 19.37 1.91 161.23 164.87 0.55 1.45 1.75 100 0.44 2.07 2.27 0.43 2.23 2.42 0.43 1.17 1.35 200 0.17 0.48 0.51 0.15 0.43 0.46 0.20 0.46 0.50 500 0.10 0.18 0.19 0.08 0.15 0.16 0.10 0.16 0.17 2 20 1.39 15.02 16.96 2.62 290.33 297.17 0.61 2.02 2.39 50 0.83 11.33 12.02 1.19 165.29 166.71 0.61 1.77 2.14 100 0.31 1.10 1.20 0.30 1.12 1.21 0.36 0.95 1.08 200 0.16 0.33 0.36 0.14 0.28 0.30 0.18 0.29 0.33 500 0.06 0.11 0.11 0.05 0.09 0.09 0.06 0.09 0.10

25
TABLE 3 Simulation Results with 3k =
Sample MME MLE BMLE
Mean Size Bias Var. MSE Bias Var. MSE Bias Var. MSE 0.75 50 1.30 22.25 23.95 3.69 434.12 447.72 -0.68 0.86 1.32 100 2.24 51.12 56.12 4.16 387.81 405.11 -0.07 1.34 1.35 200 1.82 44.85 48.15 2.33 106.92 112.34 0.35 1.89 2.01 500 0.66 16.94 17.37 0.72 30.20 30.72 0.45 2.05 2.26 1000 0.26 1.11 1.18 0.27 1.07 1.15 0.30 1.04 1.13 1 50 1.61 26.19 28.79 3.48 797.57 809.66 -0.16 1.23 1.26 100 1.95 33.32 37.14 2.77 127.68 135.36 0.44 2.08 2.27 200 0.93 11.23 12.09 0.98 12.86 13.83 0.54 2.27 2.55 500 0.37 2.24 2.38 0.38 2.34 2.48 0.39 1.61 1.76 1000 0.14 0.46 0.48 0.14 0.44 0.46 0.17 0.45 0.48 1.5 50 2.12 37.55 42.03 3.77 343.90 358.08 0.56 2.63 2.94 100 1.29 23.20 24.86 1.54 51.16 53.52 0.74 2.97 3.51 200 0.49 3.27 3.52 0.50 3.32 3.57 0.51 2.20 2.47 500 0.19 0.64 0.67 0.18 0.60 0.63 0.22 0.62 0.67 2 50 2.06 46.27 50.50 3.35 275.58 286.80 0.92 3.62 4.47 100 0.80 7.84 8.47 0.80 10.03 10.68 0.71 2.77 3.28 200 0.31 1.27 1.37 0.31 1.22 1.31 0.38 1.28 1.43 500 0.11 0.36 0.38 0.10 0.34 0.35 0.13 0.34 0.36

26
TABLE 4 Simulation Results with 4k =
Sample MME MLE BMLE
Mean Size Bias Var. MSE Bias Var. MSE Bias Var. MSE 0.75 50 0.80 23.04 23.69 3.45 407.23 419.14 -1.55 0.85 3.25 100 2.29 58.11 63.37 4.37 334.35 353.48 -0.70 1.40 1.89 200 2.98 120.02 128.89 5.18 829.51 856.37 0.00 2.25 2.25 500 1.94 91.61 95.37 2.31 213.92 219.25 0.62 3.63 4.01 1000 0.66 12.19 12.63 0.69 14.00 14.47 0.54 3.02 3.31 1 50 1.46 28.49 30.62 3.58 319.03 331.84 -0.85 1.46 2.18 100 2.26 57.34 62.46 3.82 382.18 396.76 -0.12 2.25 2.26 200 2.41 82.98 88.77 3.17 236.82 246.88 0.50 3.30 3.55 500 0.82 18.14 18.80 0.84 20.00 20.71 0.60 3.46 3.82 1000 0.33 1.86 1.97 0.34 1.84 1.95 0.37 1.81 1.94 1.5 50 2.40 61.00 66.76 7.40 2828.00 2882.76 0.10 2.70 2.71 100 2.46 71.07 77.13 3.64 264.57 277.79 0.73 4.06 4.59 200 1.31 55.52 57.23 1.80 425.10 428.36 0.78 4.48 5.08 500 0.28 1.73 1.81 0.28 1.64 1.71 0.34 1.68 1.80 1000 0.17 0.67 0.70 0.17 0.64 0.67 0.20 0.66 0.70 2 50 2.60 52.54 59.30 4.33 617.93 636.68 0.74 4.17 4.71 100 1.91 61.97 65.62 2.64 307.03 314.00 0.93 4.96 5.83 200 0.83 8.16 8.85 0.85 8.66 9.38 0.81 4.06 4.72 500 0.21 1.11 1.16 0.22 1.08 1.12 0.27 1.12 1.19 1000 0.08 0.38 0.38 0.09 0.39 0.39 0.11 0.42 0.43

27
TABLE 5 Estimation Results of k for Crash Count Data
sample MME MLE BMLE
size Mean Var. Mean Var. Mean Var.
354* 3.78 3.26 3.35 50** 5.15 26.99 6.38 238.55 2.95 1.49 100** 5.64 38.49 5.77 90.82 3.57 2.36 200** 4.98 22.88 4.55 30.56 3.85 2.68
Note: *: one dataset is used. **: 1000 subsamples are used.