esercitazioni dal corso di meccanica delle vibrazioni
DESCRIPTION
Esercitazioni:1. Sospensioni automobilistiche: modello a 2 gdl2. Analisi modale (sistema a 3 gdl)3. Controllo modale4. FEM: trave a sbalzo5. FEM: disco freno6. FEM: Pala ventilatoreTRANSCRIPT

A.A. 2009-2010Prof. Massimo Cavacece
Alfredo Patrizi - Matr. 0131736Ingegneria meccanicaemail: [email protected]
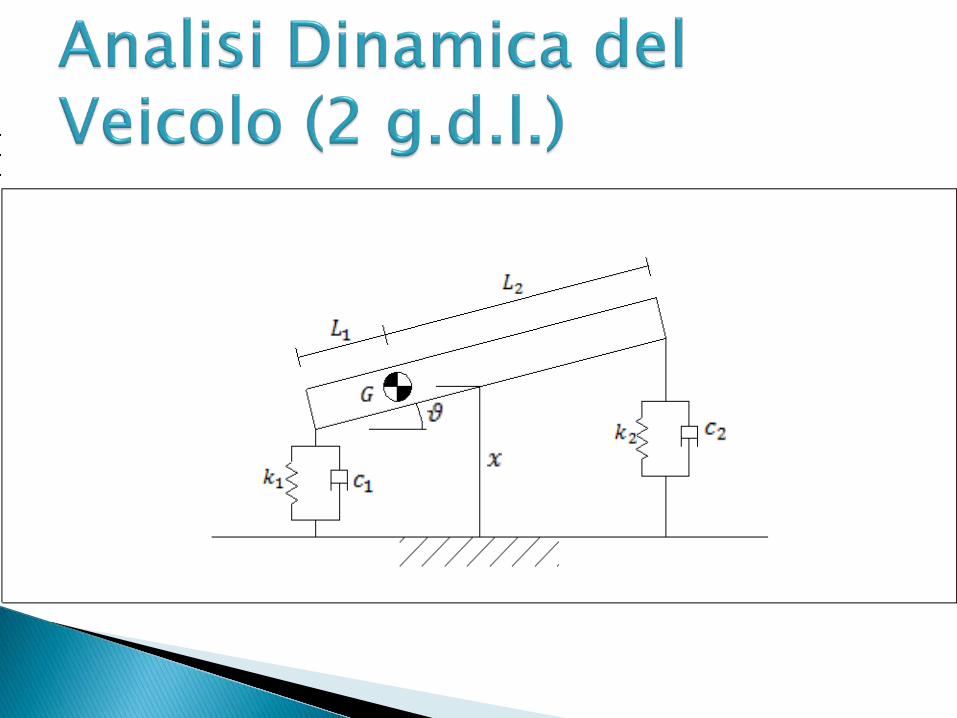

Equazione del moto:

Si procede ipotizzando per il sistema una soluzione del tipo:
Riscrivendo le equazioni del sistema nelle formulazioni proposte dal metodo delle variabili di stato e dal metodo di W.J. Duncan e sostituendovi l’espressione ipotizzata, ci si ricondurrà poi alla risoluzione di un problema agli autovalori, alla quale si procederà previa implementazione in un apposito listato in linguaggio Ch.

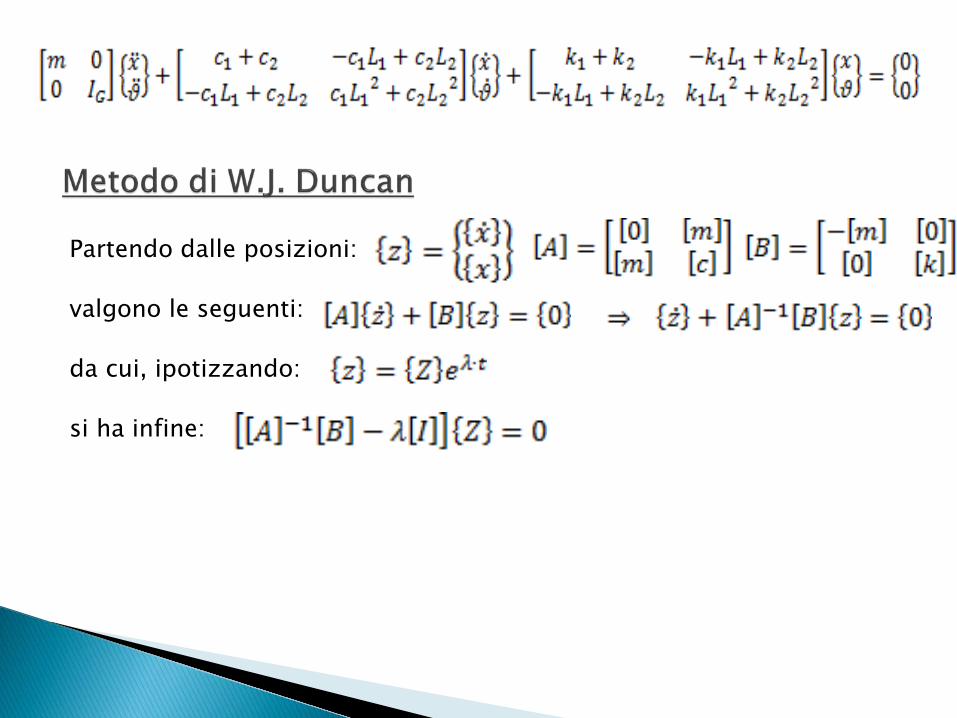
Partendo dalle posizioni:
vale la seguente:
da cui, ipotizzando:
si ha infine:
Partendo dalle posizioni:
valgono le seguenti:
da cui, ipotizzando:
si ha infine:

Si otterranno autovalori al più complessi coniugati le cui parti immaginarie costituiranno proprio le frequenze naturali del sistema.
La soluzione del sistema risulterà dalla combinazione lineare:
essendo rispettivamente gli autovalori e gli autovettori del sistema stesso.
I coefficienti complessi si ricaveranno infine dall’imposizione delle condizioni iniziali e dalla risoluzione del sistema lineare associato.
Di seguito si riporta lo sviluppo numerico di quanto appena esposto insieme ai risultati
forniti dal calcolatore
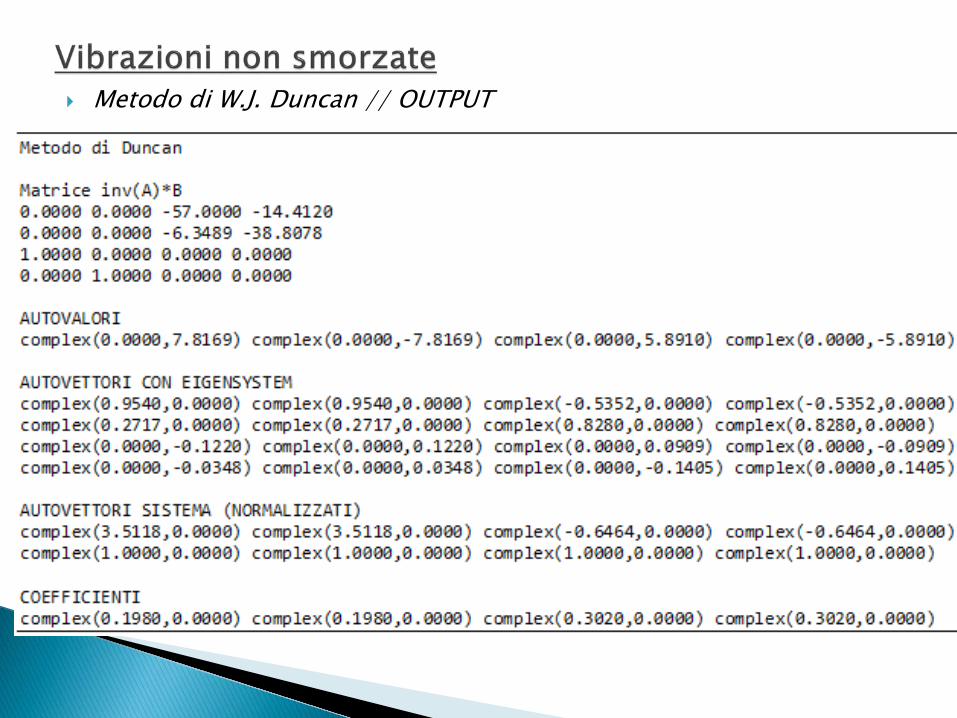
Metodo di W.J. Duncan // OUTPUT

Metodo di W.J. Duncan
Frequenze proprie del sistema:
Matrice degli autovettori normalizzati:

Metodo di W.J. Duncan // x(t)

Metodo di W.J. Duncan // ϑ(t)
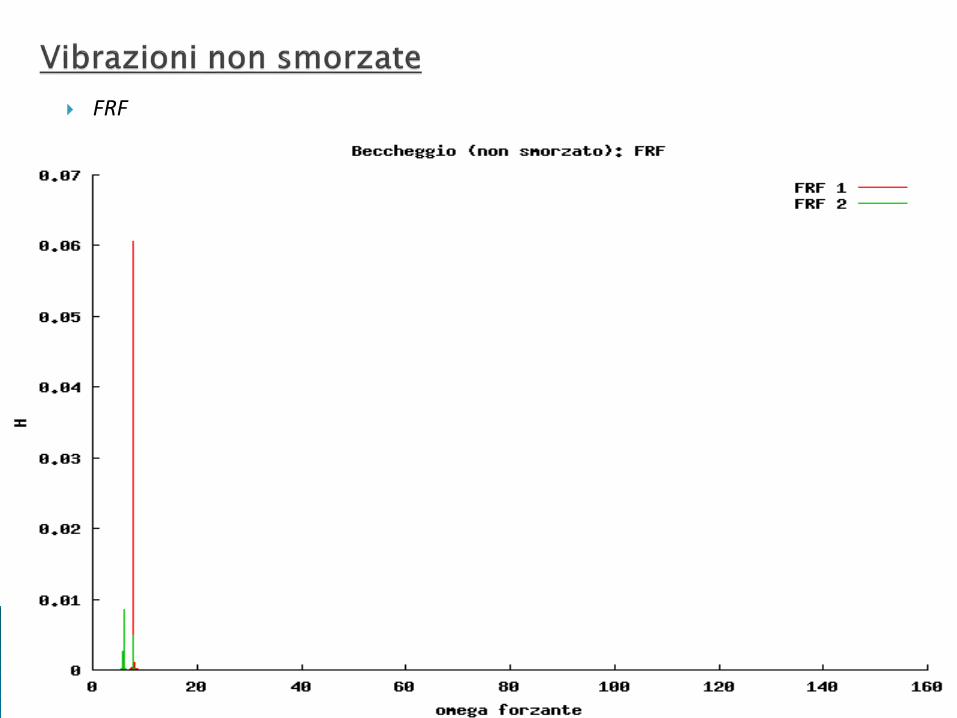
FRF

Metodo delle variabili di stato // OUTPUT

Metodo delle variabili di stato
Frequenze proprie del sistema:
Matrice degli autovettori normalizzati:

Metodo delle variabili di stato // x(t)

Metodo delle variabili di stato // ϑ(t)

Metodo di W.J. Duncan // x(t)

Metodo di W.J. Duncan // ϑ(t)

FRF

Equazione del moto:

Nella configurazione in esame, per la simmetria del sistema rispetto all’asse frontale valgono le seguenti:
Le equazioni del moto risultano pertanto già disaccoppiate nelle variabili x, ϑ:
Si può procedere pertanto alla risoluzione numerica delle stesse attraverso la funzione odesolve(), basata sull’applicazione del metodo di Runge-Kutta del secondo ordine. Per entrambe le soluzioni ricavate si presentano di seguito, nei due casi studiati (moto smorzato e non), i grafici dell’andamento nel tempo.

x(t)
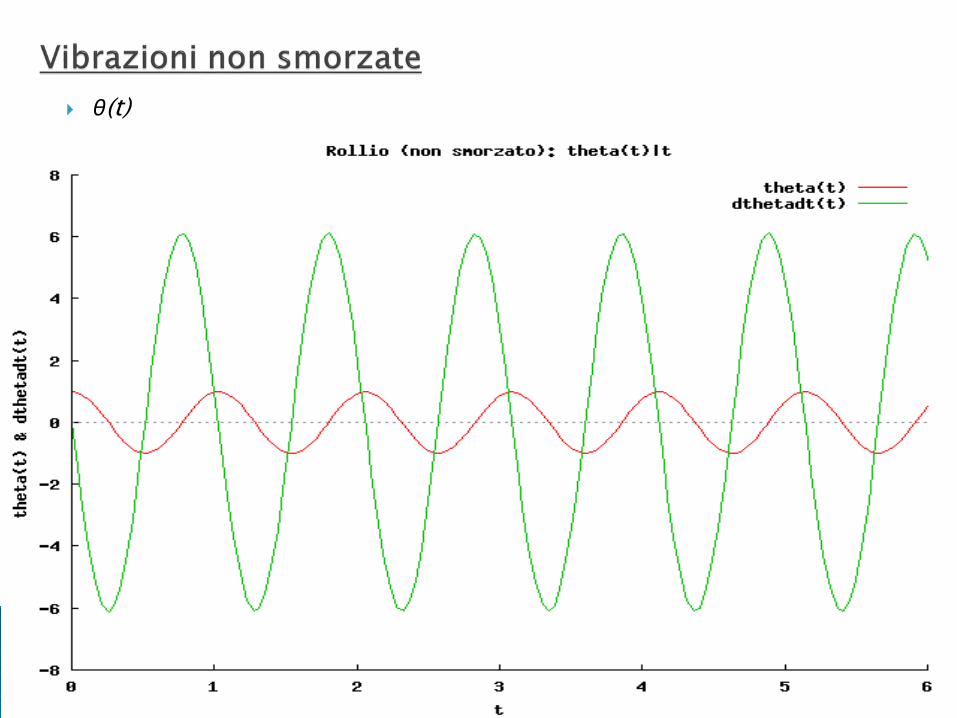
ϑ(t)

FRF

x(t)

ϑ(t)

FRF



Metodo delle variabili di stato // OUTPUT
Metodo delle variabili di stato
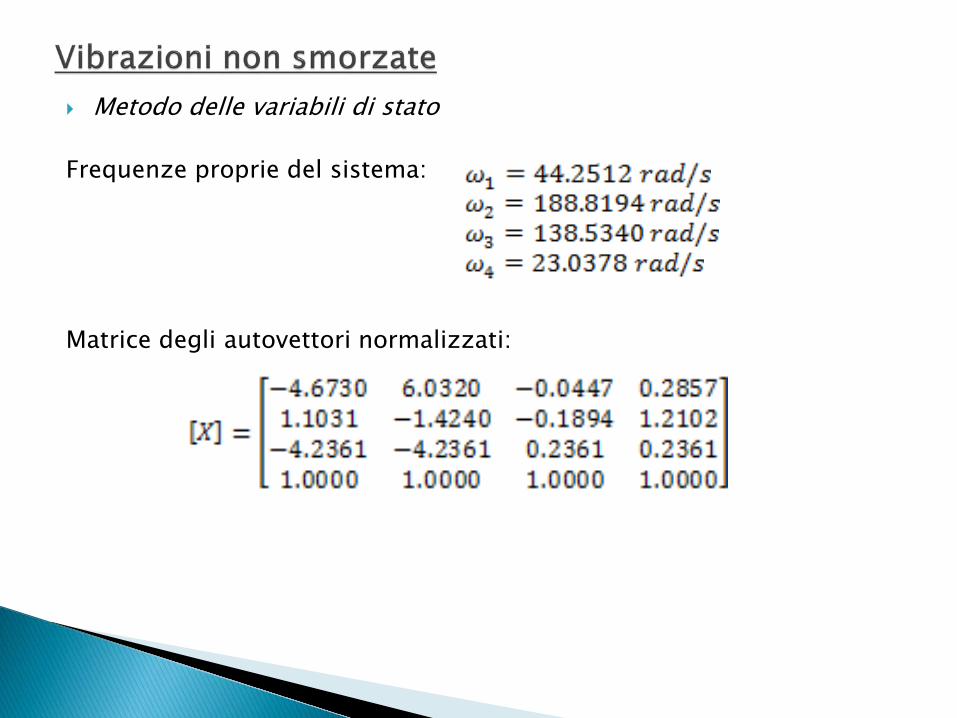
Frequenze proprie del sistema:
Matrice degli autovettori normalizzati:

Metodo delle variabili di stato //

Metodo delle variabili di stato //

Metodo delle variabili di stato //

Metodo delle variabili di stato //

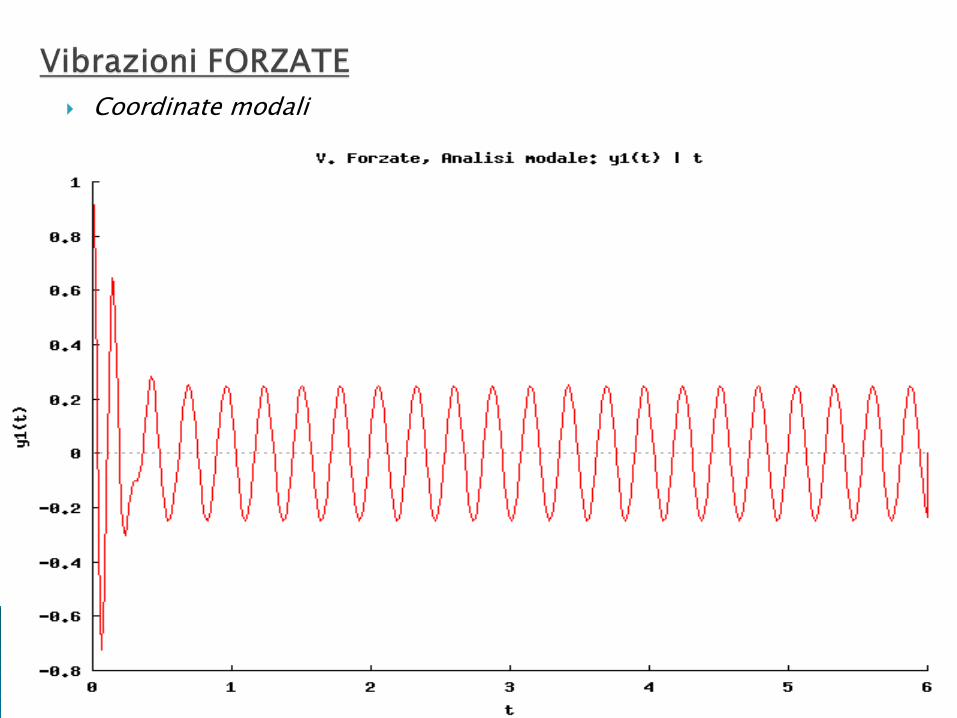
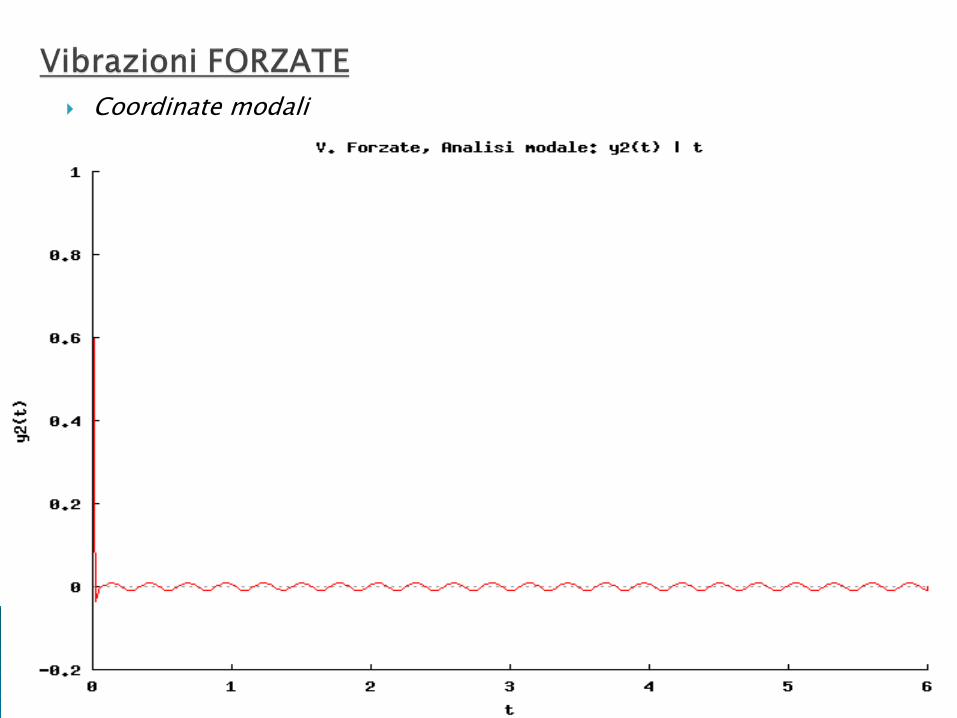
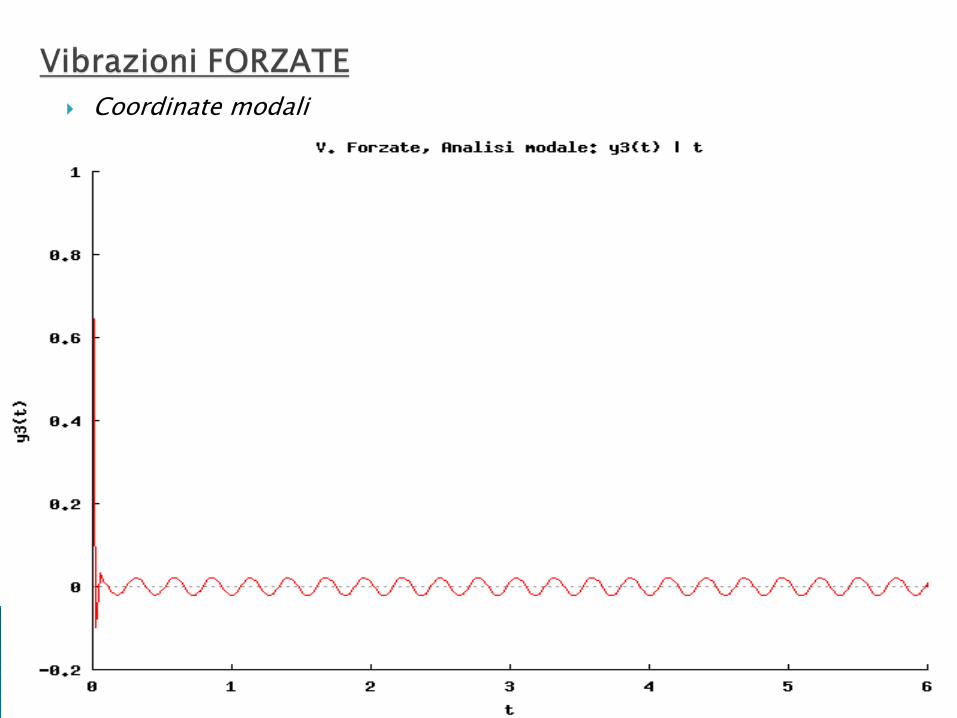
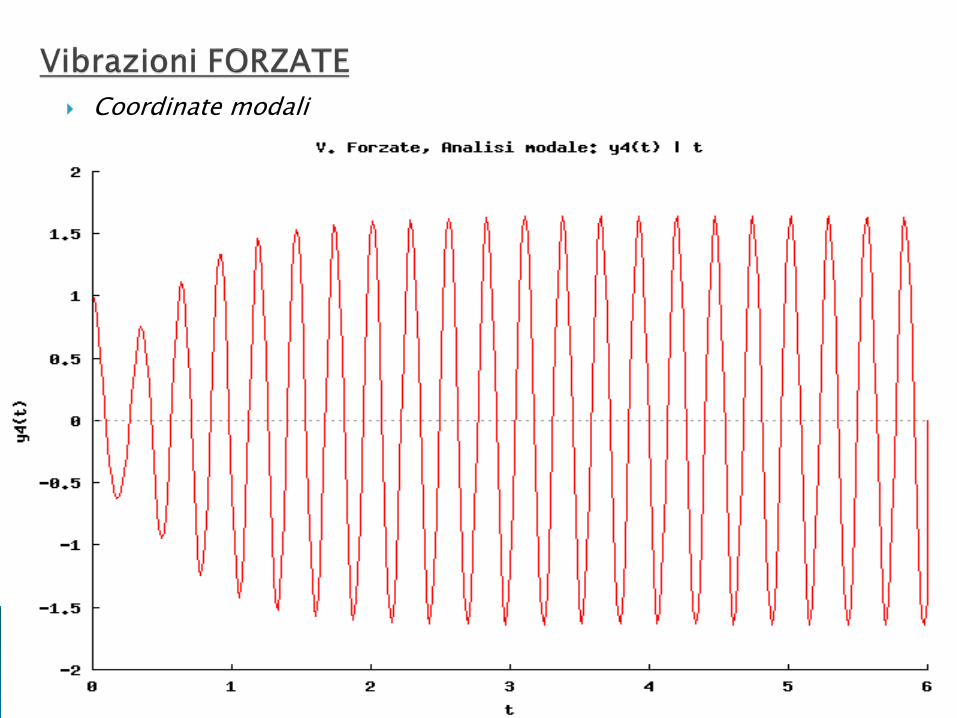
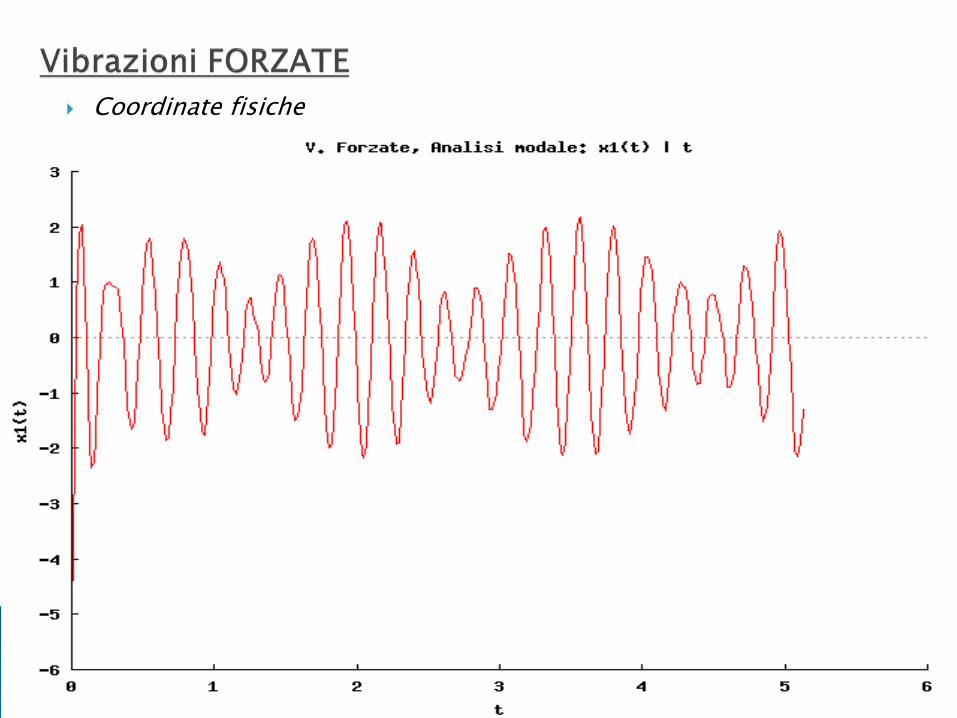
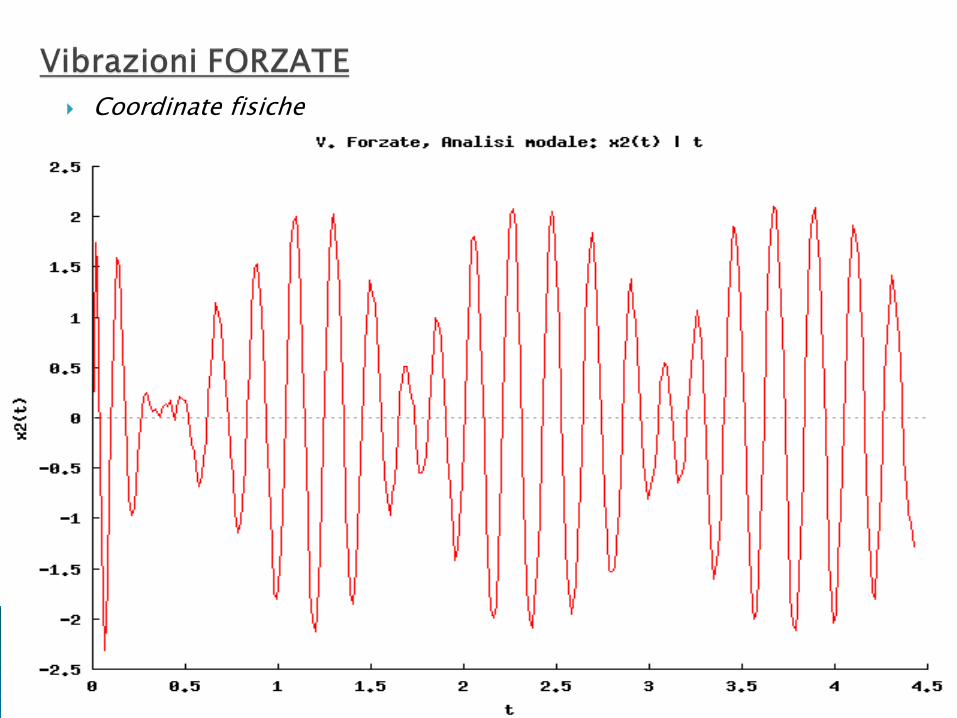
Si presentano di seguito i risultati ottenuti dall’Analisi Modale del sistema, di nuovo sviluppati attraverso apposito listato in linguaggio Ch. Si dedurranno le matrici modali delle masse e delle rigidezze; in particolare, si farà riferimento allo smorzamento viscoso, adottando valori delle costanti di proporzionalità equivalenti:
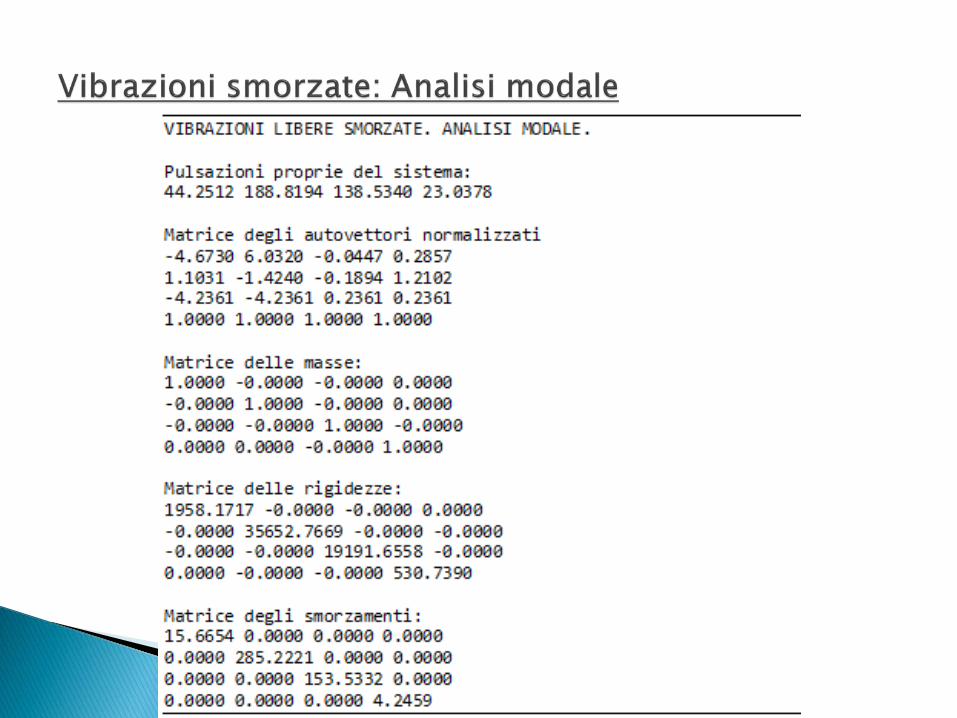

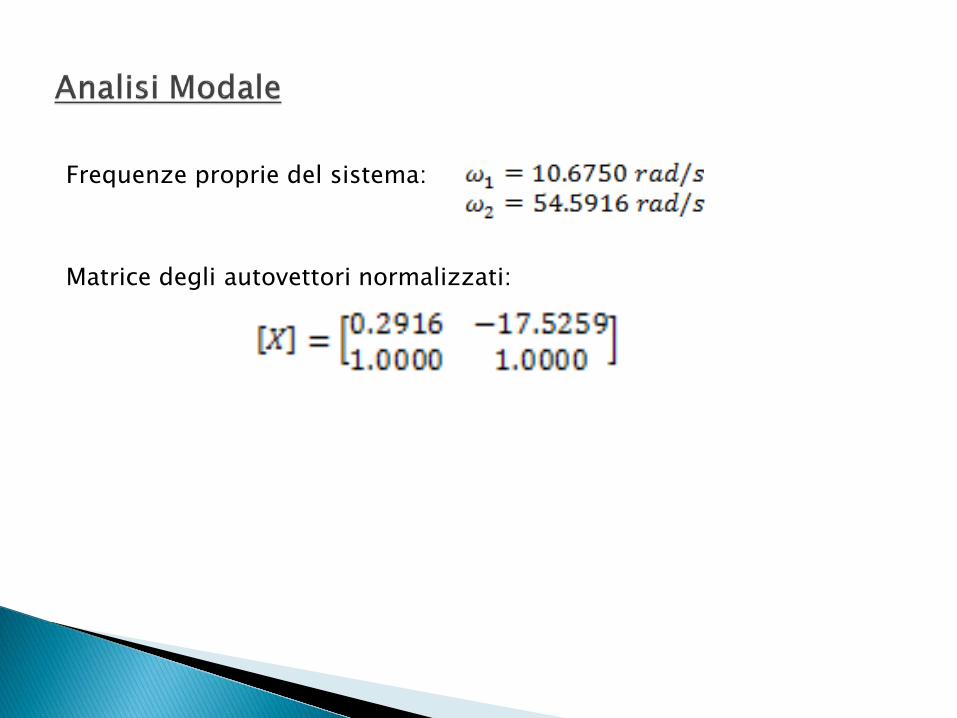
Frequenze proprie del sistema:
Matrice degli autovettori normalizzati:
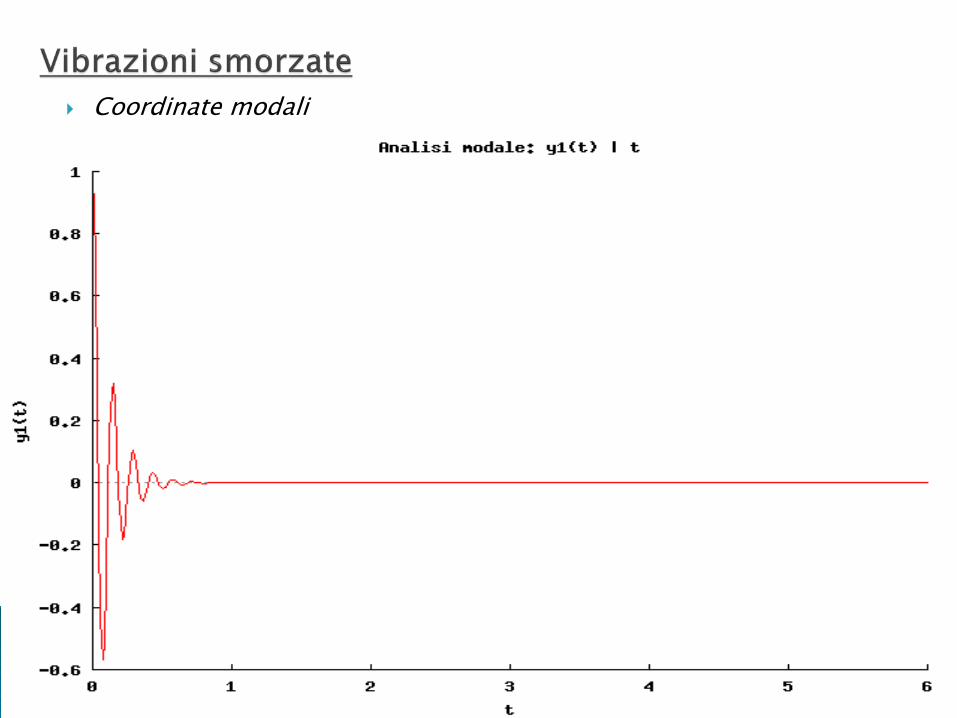
Coordinate modali

Coordinate modali

Coordinate modali

Coordinate modali
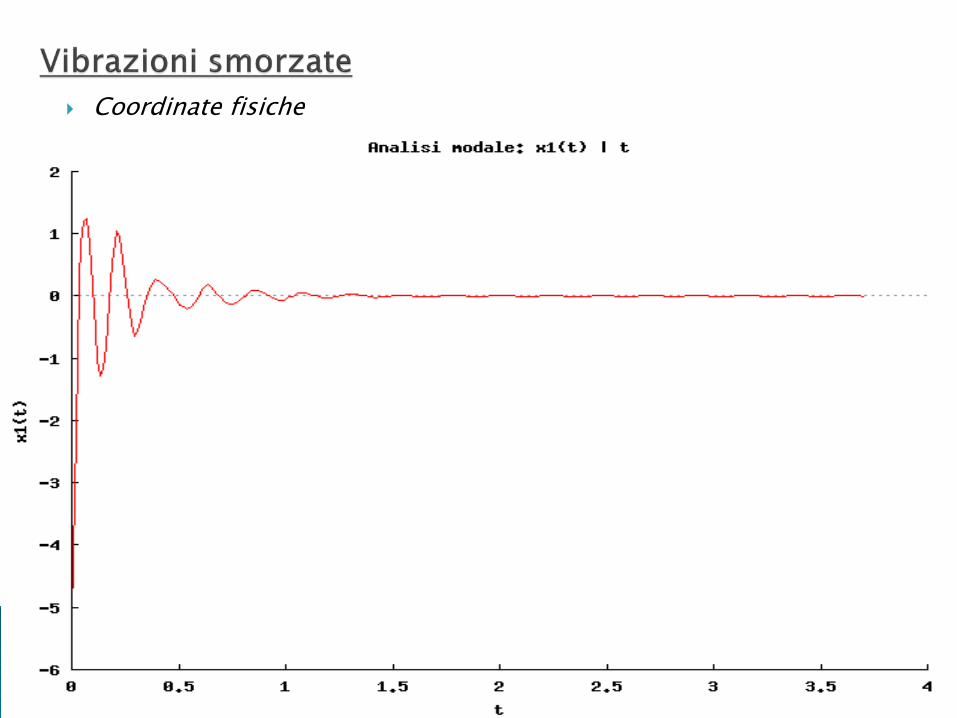
Coordinate fisiche

Coordinate fisiche

Coordinate fisiche

Coordinate fisiche

FRF
Coordinate modali
Coordinate modali
Coordinate modali
Coordinate modali
Coordinate fisiche
Coordinate fisiche

Coordinate fisiche

Coordinate fisiche


Frequenze proprie del sistema:
Matrice degli autovettori normalizzati:

Sollecitazione impressa dal profilo stradaleDetta L la lunghezza d’onda della perturbazione offerta dal piano
stradale, vale la seguente:
da cui:
Funzione guadagnoSi introduce l’azione di controllo sul primo modo di vibrare:
e attraverso il listato Ch si può graficare la variazione, con il guadagno g, della prima pulsazione naturale del sistema e della relativa velocità critica di percorrenza, per poi procedere alla scelta di un valore per g tale da mantenere quest’ultima al di fuori del range di sicurezza 0-200 km/h
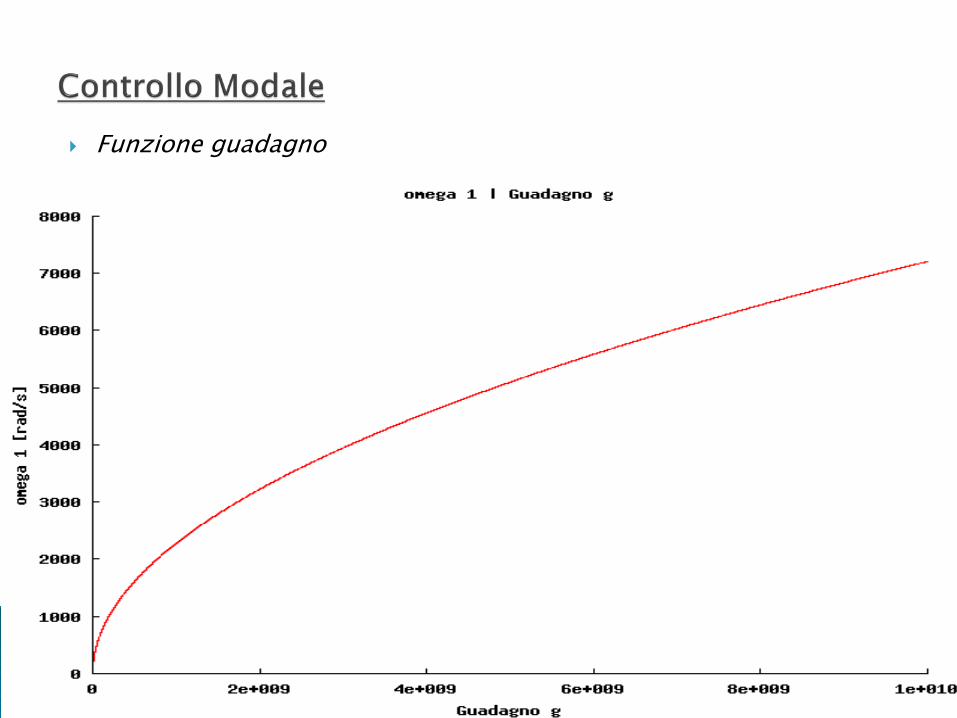
Funzione guadagno

Funzione guadagno

Funzione guadagno
Il programma mostra come a tale valoreper la funzione guadagno corrisponda:
che risulta superiore alle frequenzepreviste per la perturbazione stradalenel range di velocità considerato.

FRF

Coordinate modali

Coordinate modali

Carico impulsivo
Accelerometro

La trave di Fe360 ha dimensioni 677x30x5 (mm) ed è incastrata ad un’estremità. Si applica un’eccitazione impulsiva all’estremità opposta e si studia il moto conseguente analizzandone i dati sperimentali raccolti.
Si elabora in un primo momento un modello agli elementi finiti della trave secondo la mesh beam: i risultati analitici verranno successivamente confrontati con quelli deducibili sperimentalmente

Materiale: Fe360

Property: modello beam

Geometry, Mesh, ConstraintDefinita la geometria unidimensionale, si procede con una mesh a 10
elementi con gli 11 nodi equidistanziati; si vincola inoltre il nodo 1 con un incastro.

AnalysisSi riportano di seguito i risultati dell’analisi modale per i primi 10 modi
di vibrare

Analysis: Mode 1In particolare, si riporta di seguito la configurazione deformata del
primo modo di vibrare, che risulta essere flessionale.

Analysis: Mode 1//Strain energy
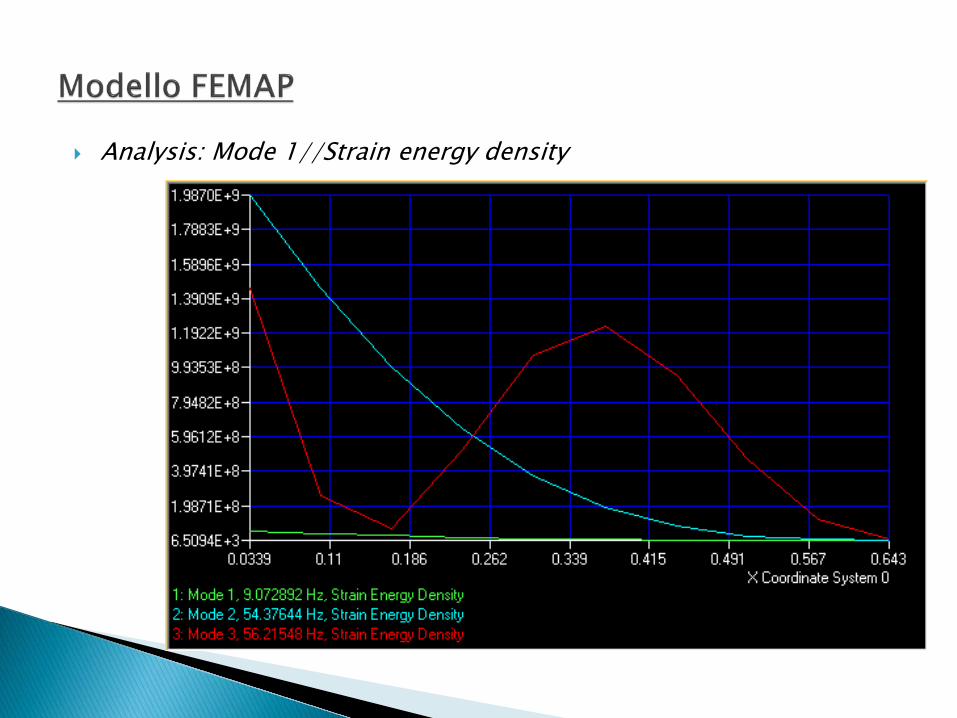
Analysis: Mode 1//Strain energy density
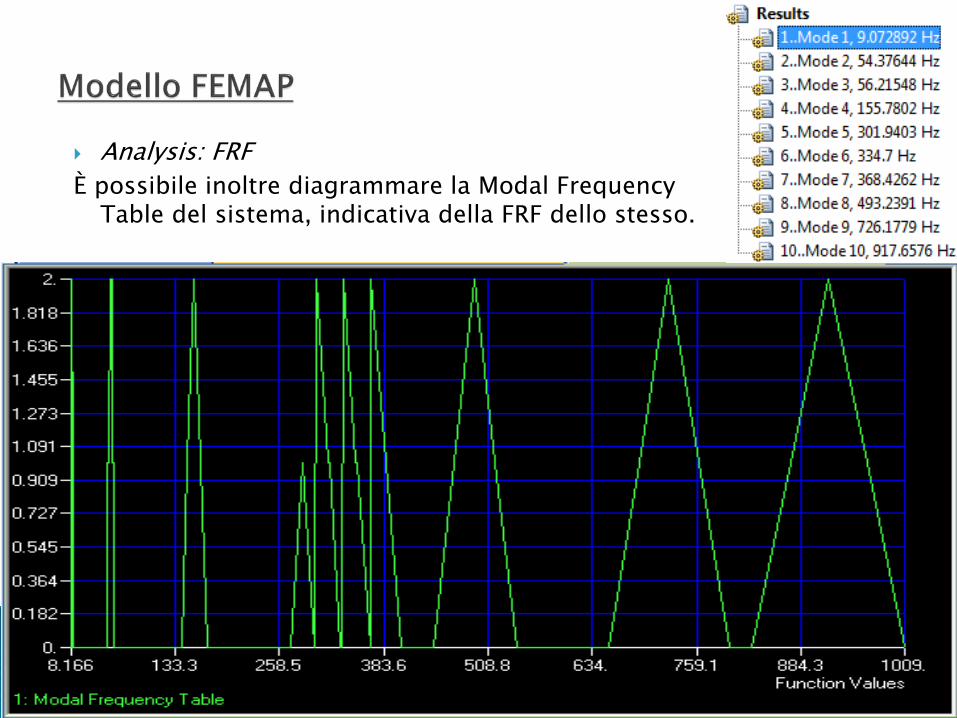
Analysis: FRFÈ possibile inoltre diagrammare la Modal Frequency
Table del sistema, indicativa della FRF dello stesso.

Dalla verifica effettuata in laboratorio, si sono raccolti i dati della trave sollecitata in maniera impulsiva. L’accelerometro è stato posto nelle varie misure in tre posizioni diverse:- nell’incastro;- nella mezzeria;- in punta.
I dati sono poi stati, una volta privati del ”rumore” e scalati allo zero, elaborati con Origin per ricavarne la FFT.
Per ogni posizione sono state effettuate 3 misure e poi è stata fatta la media.
Il risultato è stato che i risultati più affidabili si hanno tanto più si è lontani dall’incastro.
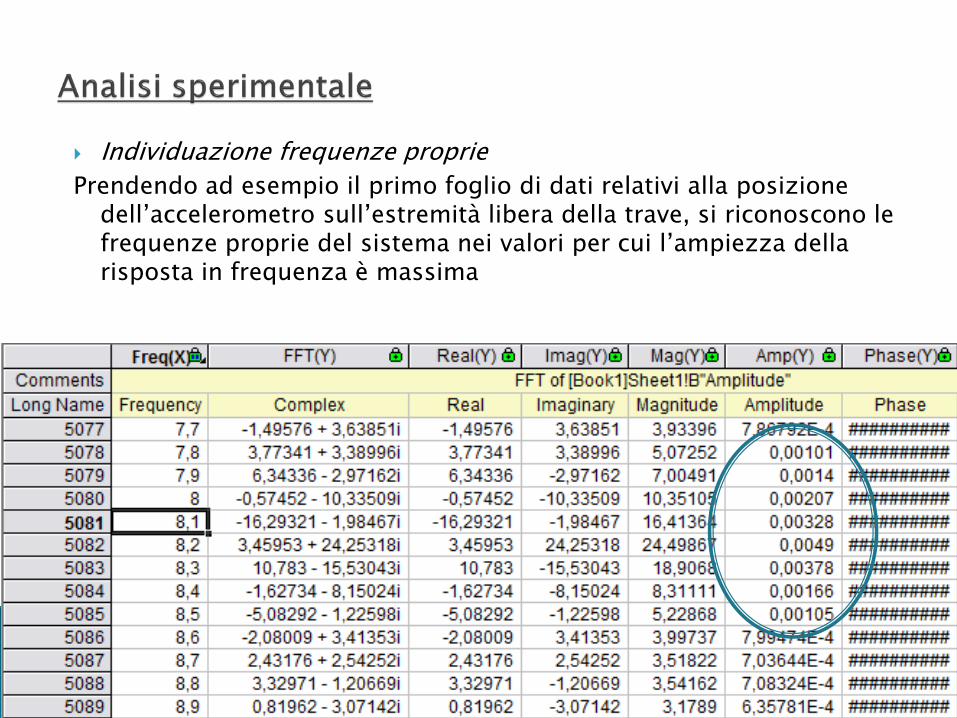
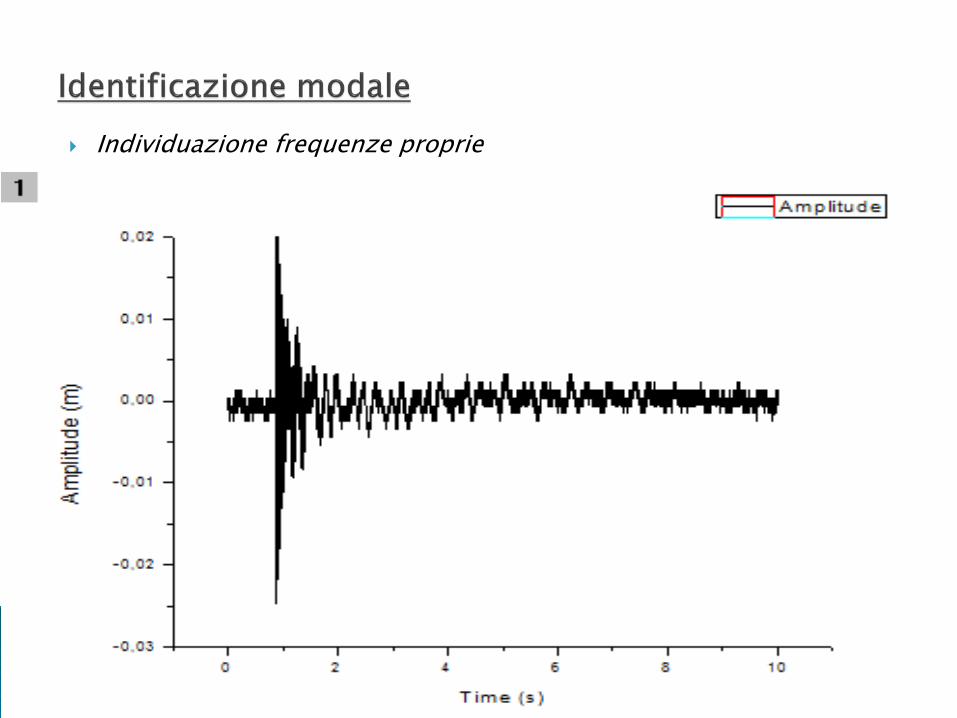
Individuazione frequenze propriePrendendo ad esempio il primo foglio di dati relativi alla posizione
dell’accelerometro sull’estremità libera della trave, si riconoscono le frequenze proprie del sistema nei valori per cui l’ampiezza della risposta in frequenza è massima

Individuazione frequenze proprieSi riportano di seguito anche i grafici dello spostamento e della
risposta in frequenza sempre per un set di dati.


Individuazione frequenze proprieI dati concordano sufficientemente con i risultati ottenuti dall’analisi
agli elementi finiti.

Coefficiente di smorzamentoIn conclusione si è determinato il coefficiente di smorzamento in base
al metodo della potenza media dissipata.
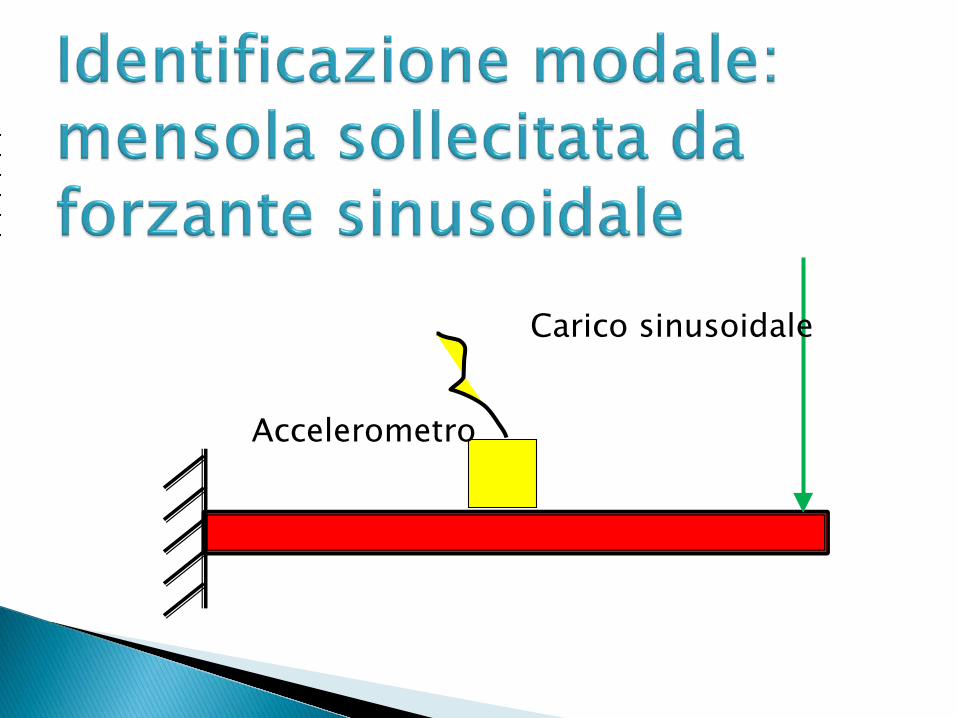
Carico sinusoidale
Accelerometro

Si analizzano di seguito le risposte del modello di trave di cui sopra a sollecitazioni sinusoidali di diversa frequenza eccitatrice. Si definiscono a tal fine l’apposita funzione nel tempo ed il carico.

LoadSi definiscono quindi il carico e le specifiche per l’analisi dinamica

Il risultato dell’analisi ci evidenzia come l’eccitazione a 8Hz non sia pericolosa per la struttura, ma sia comunque da evitare in quanto prossima alla frequenza fondamentale(9Hz) al fine di non incorrere nel fenomeno della risonanza meccanica.
La deformazione in punta va scemando nel tempo(NORISONANZA)

La deformazione in punta va scemando nel tempo(NO RISONANZA)
Stesso discorso per l’accelerazione lineare
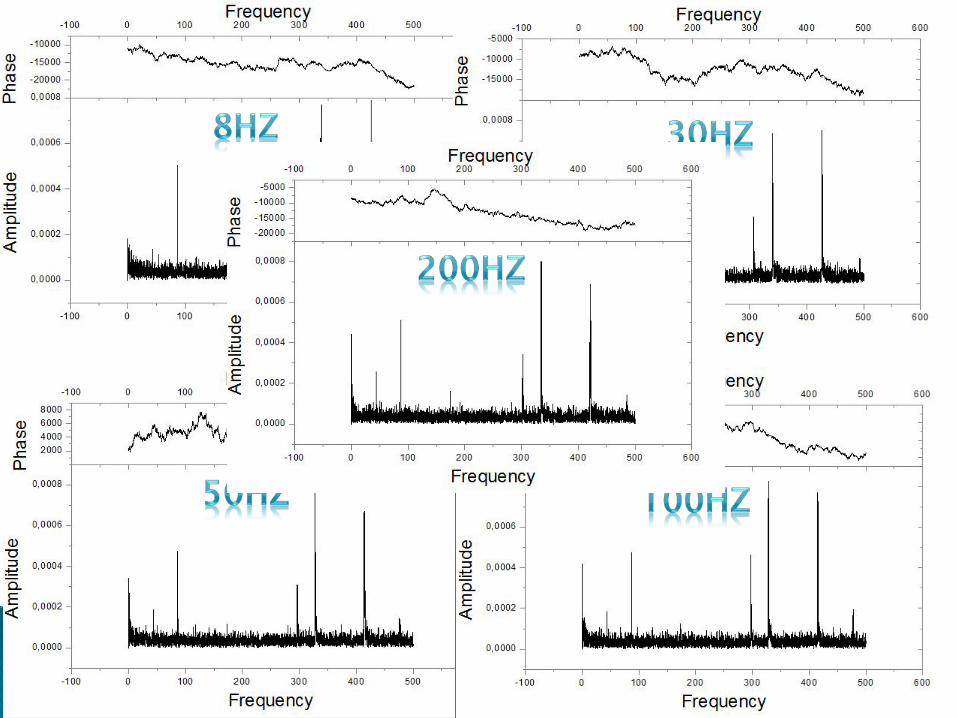
Si sono poi studiate le risposte del sistema a forzanti con diversa frequenza:
- 30Hz;- 50Hz;- 100Hz;- 200Hz.Le conclusioni sono sempre le stesse:le frequenze più vicine a quelle
proprie del sistema sono da evitare.La deformazione in punta va scemando nel tempo(NORISONANZA)

La deformazione in punta va scemando nel tempo(NO RISONANZA)
Stesso discorso per l’accelerazione lineare
30Hz:l’accelerazione all’aumentare del tempo tende a zero.

La deformazione in punta va scemando nel tempo(NO RISONANZA)
Stesso discorso per l’accelerazione lineare
30Hz:l’accelerazione all’aumentare del tempo tende a zero.100Hz:l’accelerazione all’aumentare del tempo tende a zero.

L’elaborazione con Origin dei segnali acquisiti alle varie frequenze ci permette di stabilire le pulsazioni di risposta della trave.


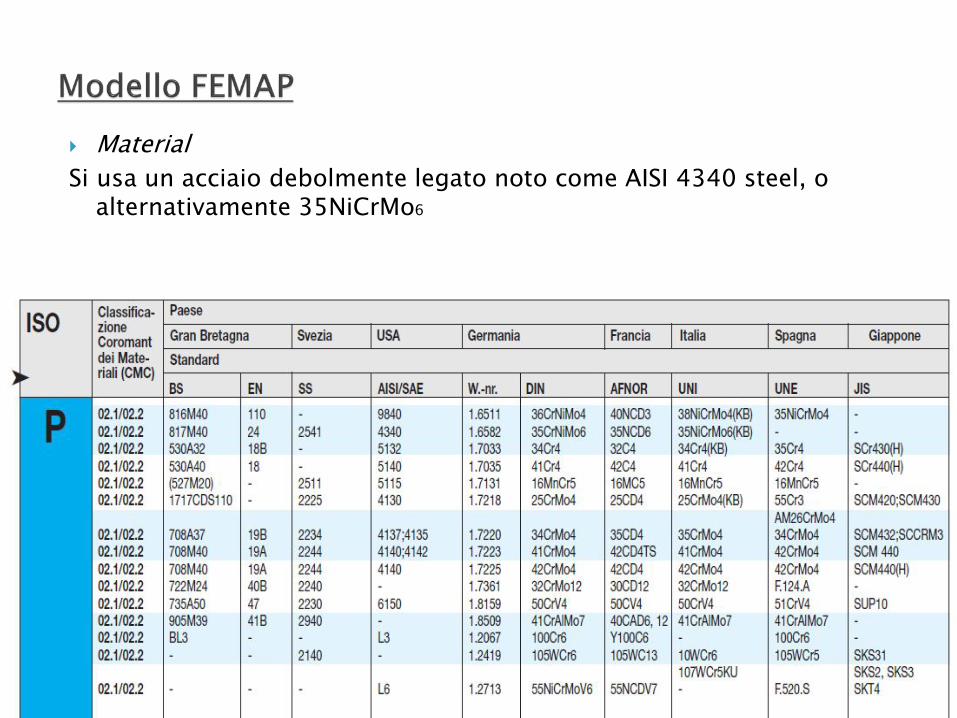
MaterialSi usa un acciaio debolmente legato noto come AISI 4340 steel, o
alternativamente 35NiCrMo6

MeshSi è sviluppata una mesh di tipo Plate a 916 elementi per 1788 nodi.

Normal mode analysisDall’analisi modale del modello plate, si ottengono i seguenti risultati:

Normal mode analysisI primi modi (1⩫6) evidenziati da FEMAP (di
frequenze pressoché nulle) rappresentano i motidi traslazione e rotazione nello spazio.

Normal mode analysis // mode 7Particolare attenzione meritano i successivi 4 modi
individuati da FEMAP; in particolare, si analizzail modo proprio 7.

Normal mode analysis // mode 7Total Translation

Normal mode analysis // mode 7Strain Energy

Normal mode analysis // mode 7,8,9,10Total Translation (al variare della fase phi in coordinate polari)

Normal mode analysis // mode 7,8,9,10Strain Energy (al variare della fase phi in coordinate polari)

Si è effettuata una verifica in laboratorio da cui sono stati raccolti i dati del disco sollecitato in maniera impulsiva, collocando l’accelerometro nelle posizioni (phi):- 0°- 90°- 180°- 360°
Di nuovo, una volta privati del rumore e scalati allo zero, i dati sono stati elaborati con Origin per estrapolarne la FFT.
Di seguito si mostrano i risultati ottenuti per un set di file.

Individuazione frequenze proprieSi riportano di seguito anche i grafici dello spostamento e della
risposta in frequenza sempre per un set di dati.
Individuazione frequenze proprie

Picchi a 1.8 Hz, 2.6 Hz, ∼5.4 Hz

MaterialErgal (7075-T651)
MeshElemento tipo SOLID (Parabolic Tetra)N° nodi: 10504; N° elementi: 5827

ConstraintSi definisce l’incastro della pala alla struttura.

LoadNel moto del rotore, la pala è soggetta a una pressione dinamica,
dipendente dalla sua velocità di rotazione. Si introduce pertanto un sistema di forze di pressione lungo la sua superficie.

In particolare, si presentano di seguito le configurazioni deformate dei modi 1,3 (flessionali)
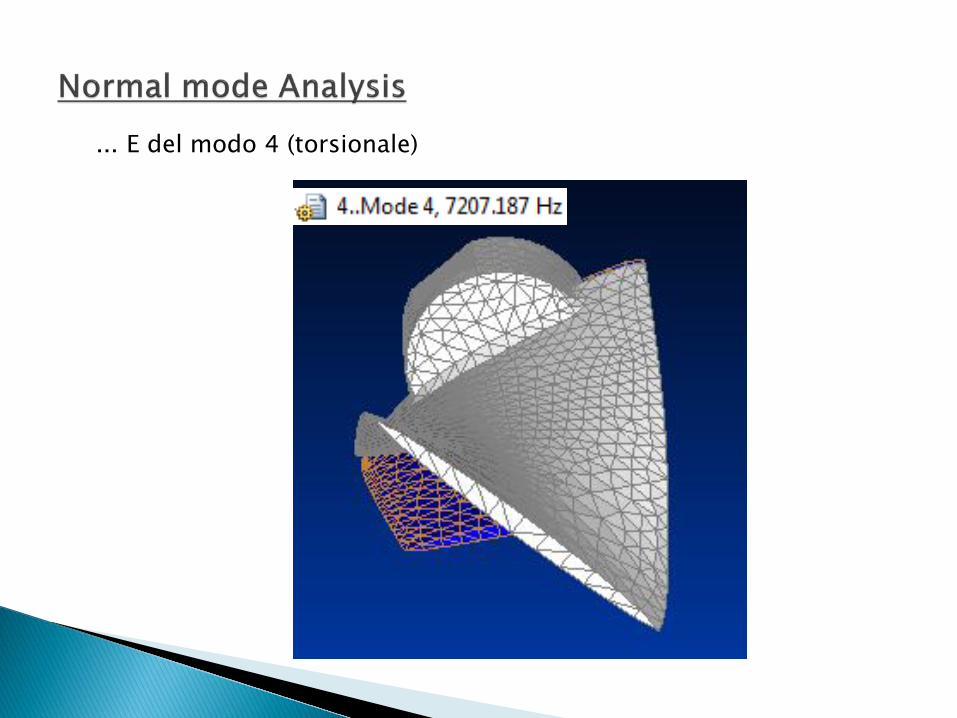
... E del modo 4 (torsionale)
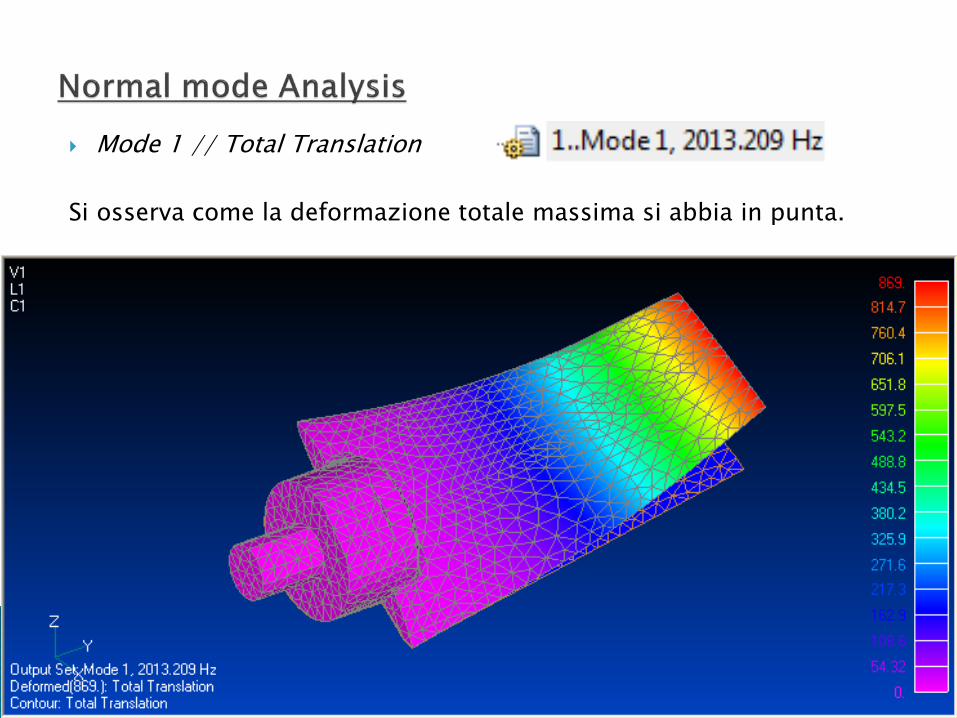
Mode 1 // Total Translation
Si osserva come la deformazione totale massima si abbia in punta.

Mode 1 // Total Translation
Si osserva come la deformazione totale massima si abbia in punta.
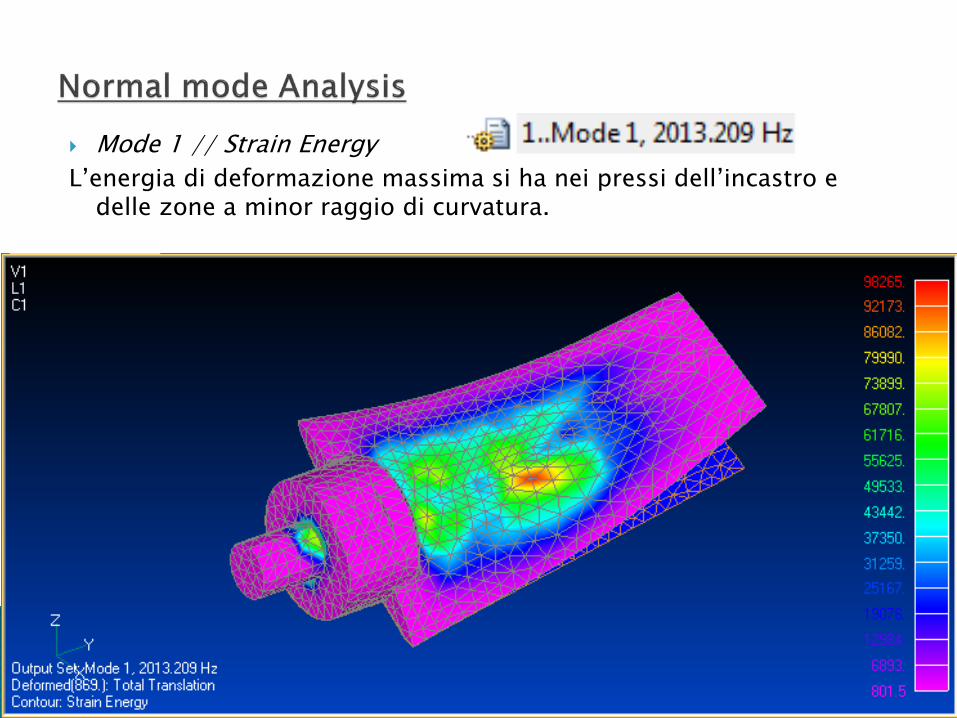
Mode 1 // Strain EnergyL’energia di deformazione massima si ha nei pressi dell’incastro e
delle zone a minor raggio di curvatura.

Mode 1 // Strain EnergyL’energia di deformazione massima si ha nei pressi dell’incastro e
delle zone a minor raggio di curvatura.

Strain EnergyL’energia di deformazione massima si ha nei pressi
dell’incastro e delle zone a minor raggio di curvatura.

Analysis: FRFÈ possibile inoltre diagrammare la Modal Frequency
Table del sistema, indicativa della FRF dello stesso.

A.A. 2009-2010Prof. Massimo Cavacece
Alfredo Patrizi - Matr. 0131736Ingegneria meccanicaemail: [email protected]