esci 411, advanced exploration geophysics (micro)seismicity john townend eqc fellow in seismic...
TRANSCRIPT

Esci 411, Advanced Exploration Geophysics
(Micro)seismicity
John Townend
EQC Fellow in Seismic Studies

Outline
• A history of seismometry
• Simple and damped harmonic motion
• The seismometer equation– Forced oscillation of a damped pendulum
• Response characteristics– Frequency response, bandwidth, dynamic range
NB: Several figures from Stein & Wysession (2003) are gratefully acknowledged

Fundamental challenges
1. How do we measure ground motion using an instrument that is itself attached to the ground, and moving?
2. How do we make reliable measurements of motion occurring over a very wide range of frequencies and amplitudes?

A mass on a spring
• Force on mass due to spring F = –k
• Newton’s 2nd law F = ma –k = m
• Natural frequency 0
2 k/m
• Overall equation = –0
2 (t)spring constant, k
mass, m
..
..

Free resonance
The mass oscillates at the natural frequency, o
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
0 1 2 3 4 5 6
Time
Dis
pla
ce
me
nt
original mass, original springlarger mass, original springoriginal mass, stiffer spring

A simple harmonic oscillator
mkss ,02
natural frequency
(t)spring constant, k
mass, m

A damped harmonic oscillator
(t)spring constant, k
mass, m
damping coefficient, c
mco 202 2 ,
damping parameter
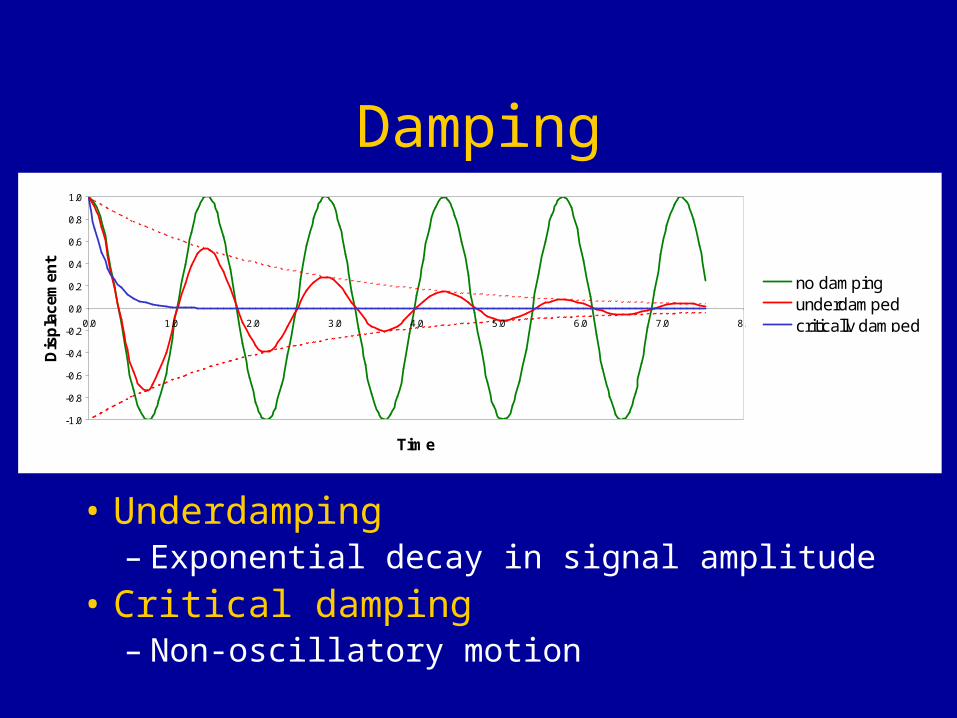
Damping
• Underdamping– Exponential decay in signal amplitude
• Critical damping– Non-oscillatory motion
-1.0
-0.8
-0.6
-0.4
-0.2
0.0
0.2
0.4
0.6
0.8
1.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
Time
Dis
pla
cem
ent
no dampingunderdampedcritically damped

The seismometer equation
uo 22
Pen
dulu
m a
ccel
erat
ion
Vis
cous
dam
ping
ter
m
Und
ampe
d os
cilla
tion
term
Gro
und
acce
lera
tion

Harmonic shaking, no damping
• How does an undamped seismometer react to sinusoidal shaking, u(t) = A sin pt ?
• We’ll look at the signal amplification only:
• So, if the forcing frequency p is equal to the seismometer’s natural frequency o, we get resonance and destroy the seismometer
222 ppu o

End-member responses
• High-frequency oscillations (>>o):
– Seismometer records displacement
• Low-frequency oscillations (<<o):
– Seismometer records acceleration
uo 22
uo 22

Frequency response
• How does the seismograph react to shaking at different frequencies?
• These curves are drawn in terms of the damping factor, h=/o

Summary
• In recording seismic waves, we face three principal complications– Our recording instrument is not stationary– The waves contain energy at many frequencies– The waves have a broad range of amplitudes
• In the next series of slides, we’ll look at how to overcome these issues using specific instruments

Electromechanical seismometers
Instead of measuring the mass’s motion by a
mechanical device, we can measure the voltage
induced in a moving coil
voltage sensor velocity
This increases damping

Schematic system response
• Amplitude responses– Pendulum 2 (<s)
– Velocity sensor – Galvanometer –2 (<g)
• Overall response– Governed by the particular
characteristics of these three principal components

Frequency response comparison
• Different response functions are required for different purposes
• Each seismometer’s response function is determined during calibration

Magnification and dynamic range
• Two factors control the signal magnification– Dynamic magnification (instrument response)– Static magnification (recording amplification)
• The overall magnification controls the instrument’s dynamic range:– If Amin and Amax are the minimum and maximum
recordable amplitudes, then
dynamic range (dB) = 20 log10(Amax/Amin)

Earth noise
• Tides, atmospheric pressure variations, anthropogenic sources, ocean waves, rain,…
• Mostly 5–10 s periods (0.1–0.2 Hz)
• Can be largely filtered out of broadband data

Seismometer calibration
• Natural period, To=2/o
– Time a number of undamped oscillations
• Damping, h– Measure the amplitude ratio () for a
number of successive oscillations
• Magnification, V()– Measure the ratio between the output and
input amplitudes

Digital seismometry
Even electromechanical seismometers have limitations (especially dynamic range); with appropriate filtering, digital
systems can overcome many of these

Some practical issues
• Signal frequencies– Seismic waves contain frequencies of mHz–kHz
• Signal amplitudes– Displacements can be as little as 10 µm–10 cm
• The ideal seismometer requires– High bandwidth– High dynamic range

Force-balance instruments (1)
• The compensating force is proportional to ground acceleration• The instrument behaves as if the sensor mass is much larger,
and the instrument’s natural frequency is therefore much lower
Input
Inertial sensor Coil
Force
transducer
Output
–x..
u – x....
u..

Force-balance instruments (2)
• Rationale– Negative feedback reduces the relative motion of
the sensor, and reduces nonlinear instabilities
• Advantages– Removes dependence on mechanical systems– Increases sensitivity, linearity and dynamic range– Can overcome the need for a large sensor mass
in inhospital/cramped circumstances– Reduces seismometer size!

Broadband seismometers
STS-2 broadband data in Pennsylvania from a July 1995 earthquake in Tonga
1. Original data2. Low-pass filtered3. High-pass filtered4. Zoomed high-pass filtered

Summary
• Using electromagnetic sensors and force-feedback systems, we can improve the bandwidth and dynamic range of seismometers
• This enables us to “tune” (design) instruments for specific purposes
• Array and network geometries are likewise designed for specific targets


US reference array
US transportable array (as of today)
US transportable array (plan as of 12/2010)
Global seismic network (as of 06/2012)

Suggested reading material• Stein & Wysession (2003)
– Section 6.6 (most accessible reference)
• Havskov & Alguacil (2006)– “Instrumentation in earthquake seismology”
• Udias (1999)– Chapter 21
• Aki & Richards (2002)– Section 12.1
• Scherbaum (2007)– “Fundamentals of digital seismology”