enabling techniques and algorithms for integrated
TRANSCRIPT
Enabling Techniques and Algorithms for Integrated Communication
and Navigation Satellite Systems
PhD Candidate: Lina Deambrogio
Supervisor: Prof. Giovanni E. Corazza
Global Navigation Satellite Systems (GNSS)
• Provide autonomous geo-spatial positioning with global
coverage
• Active systems
• US Global Positioning System (GPS)
• European System Galileo
• The Russian GLONASS
• The Chinese Compass system
• The Indian Regional Navigational Satellite System (IRNSS)
• The Japanese Quasi-Zenith Satellite System (QZSS)
• All these systems will operate independently and without
interfering with each other
2 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

System overview: Galileo
3
• Constellation: 30 satellites (27 operational + 3 active spares),
positioned in three circular Medium Earth Orbit (MEO) planes at
23 222 km altitude above the Earth
• High system reliability is of primary importance
• Especially for operation in critical environments, like for air
navigation and SoL services
• Important dates:
• 21 October 2011: Launch of satellite 1&2
• Summer 2012: Launch of satellites 3&4
• 2014 Initial Operational Capability (IOC)
• 2018 Full Operational Capability (FOC)
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems
GNSS Positioning
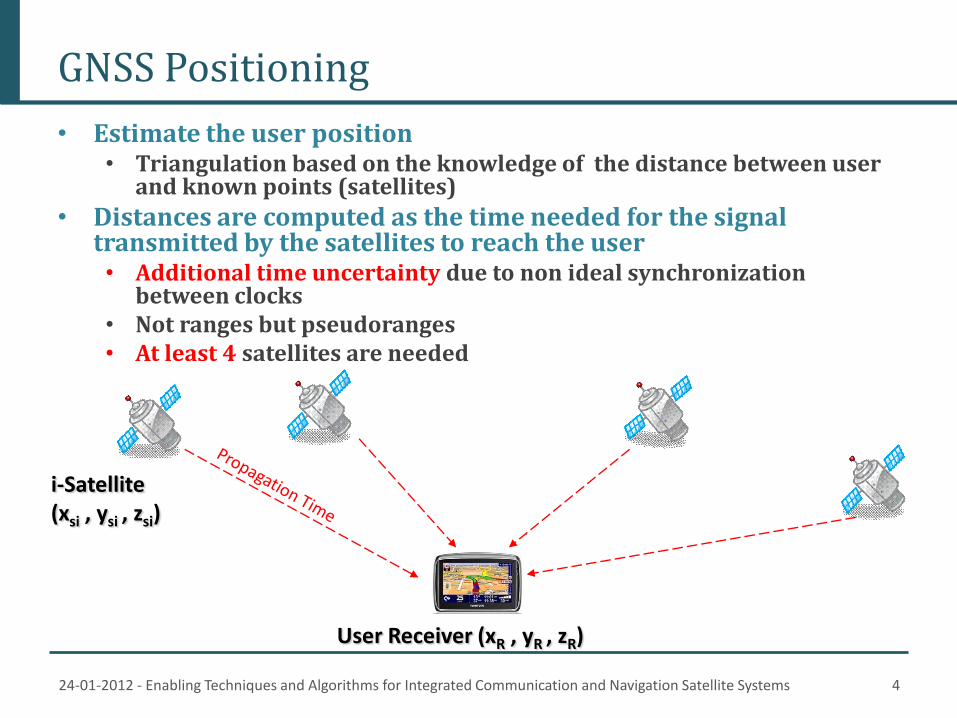
• Estimate the user position • Triangulation based on the knowledge of the distance between user
and known points (satellites)
• Distances are computed as the time needed for the signal transmitted by the satellites to reach the user • Additional time uncertainty due to non ideal synchronization
between clocks • Not ranges but pseudoranges • At least 4 satellites are needed
User Receiver (xR , yR , zR)
i-Satellite (xsi , ysi , zsi)
4 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Receiver Operations
5
Data Demodulation
Code Tracking
Carrier Tracking
Acquisition Pseudorange Calculation
Incoming signal
Code Synchronization Phase: • Acquisition
• Coarse timing and frequency estimation
•Tracking • Fine timing and frequency estimation
Position computation: • Ephemeris extraction • Pseudorange calculation • Navigation system solution
Navigation system
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Types of Aiding
6 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems
Physical Level
Position Level
Aiding
•Assist Acquisition
•Visible satellites
•Doppler frequency
•AIM: Reduce TTFF
• Keep tracking circuits locked
•AIM: help reacquisition
•Provide missing information
during signal outages
•AIM: enhance positioning
availability
•P2P
•INS

CODE ACQUISITION AIDING TECHNIQUES
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 7

Code Acquisition in CDMA Systems
• Goal: Identify the Code Epoch (t) and the Frequency Offsets (fe) of a
specific satellite signal
• Uncertainty Region (UR) is discretized into time slots t , and the frequency domain is discretized into frequency bins f:
• Two-dimensional matrix must be scanned to find Correct Hypothesis (H1)
• A large number of Incorrect Hypotheses (H0)
0 1 -1
Peak =1
Normalized Offset
p
Hyp H1 Hyp H0 Hyp H0
0.5 -0.5 d
H1 H0 H0
Peak =1 BOC(1,1)
Normalized Offset
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems
Secondary Peak:
the tracking block can
lock onto this outlier
peak
Zero Value:
Code Acquisition
block
collects only noise

Code Acquisition Techniques
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 9
• Two different Search Strategies can be defined: • Serial search (i.e. schemes based on one or more correlators)
• Consecutive time/frequency tests
• Parallel acquisition strategies (i.e. FFT/IFFT schemes) • Simultaneously tests all the possible code phases (frequency tests are required)
Incoming
Signal 2
Conj(Local Code)
FFT
Local Code
Incoming
Signal IFFT
Conj(FFT)
2
Parallel
Scheme
Serial
Scheme
Selection of the correct hypothesis
through different Decision Criteria
MAX • Decides in favor of the cell with the
largest correlation value
• Requires to scan the entire UR
Threshold Crossing (TC) • Compares each decision variable in turn
with an optimized threshold
MAX/TC •Hybrid solution

Aiding techniques
• Motivation: • Speed-up initial synchronization
• Issues: • Very low SNR values and large uncertainty region causes
operations to be performed several times
• Techniques: • A-GNSS
• P2P
• Cross-Band Aiding
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 10

Cross-Band Aiding (CBA) Idea
• Context
• Dual-band (E1/E5) receivers
• Motivation
• Fast Acquisition for Dual-Band GNSS Receivers
• Idea
• Signals in the two bands are transmitted using a common time reference
• Information can be exchanged in order to mutually reduce uncertainty regions
• Issues
• Different propagation delays
• Different chip rates
• Different code lenghts
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 11
E5aos
E5bos/cs/SoL
E6cs
E1os/cs/SoL
Lower L-Band Upper L-Band
1176.451176.45 1207.141207.14
1191.7951191.795 1278.751278.75 1575.421575.42MHz
E5
~ 24 MHz~ 24 MHz~ 51 MHz ~ 51 MHz
E5aos
E5bos/cs/SoL
E6cs
E1os/cs/SoL
Lower L-Band Upper L-Band
1176.451176.45 1207.141207.14
1191.7951191.795 1278.751278.75 1575.421575.42MHz
E5
~ 24 MHz~ 24 MHz~ 51 MHz ~ 51 MHz
Primary Code E1 E5
Code Lenght 4092 10230
Chip rate 1.023Mcps 10.23Mcps
Code Period 4 ms 1 ms
Chip Duration 977.5 ns 97.75 ns

E1-E5 CBA strategy
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 12
fk-E1 FFT MAX
Conj(FFT)
IFFT
Local Code E1c fk-E1
2MF
BOC
fs-E1
First Step - Master Signal E1
CBA E1-E5
Controller
MF BPSK
fs-E5 SSB
Processing
E5a SSB
fk-E5 MAX
Local Code E5aQ* fk-E5
2
Dual Band
Front-End
IF
Processing
Second Step - Slave Signal E5
Circular
Phase-Shift
Entire E5
AltBOC(15,10)
E1b-c
BOC (1,1)
• Acquisition in E1 over the complete uncertainty region (E1-CUR) Master Signal
• Acquisition in E5 with a reduced uncertainty region (E5-RUR) Slave Signal

E5-E1 CBA strategy
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 13
• Acquisition in E5 over the complete uncertainty region (E5-CUR) Master Signal
• Acquisition in E1 with a reduced uncertainty region (E1-RUR) Slave Signal
MF BPSK
fs-E5
fk-E1 MAX
Local Code E1c*
Entire E5
AltBOC(15,10)
fk-E1
2
SSB
Processing
MF BOC
fs-E1
E1b-c
BOC (1,1)
E5a SSB
Dual Band
Front-End
IF
Processing
fk-E5 FFT MAX
Conj(FFT)
IFFT
Local Code E5aQ fk-E5
2
CBA E5-E1
Controller
First Step - Master Signal E5
Second Step - Slave Signal E1
Circular
Phase-Shift

Timing Structures
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 14
• E1-E5 CBA
• E5-E1 CBA
E5 E5 E5 E5
E1 1° step
2° step
E5 Reduced Uncertainty Region (E5-RUR)
E1 Complete Uncertainty Region (E1-CUR)
E1-E5
SMBA
~ 977.51 ns
E5 E5 E5 E5
E1 1° step
2° step
E5 Reduced Uncertainty Region (E5-RUR)
E1 Complete Uncertainty Region (E1-CUR)
E1-E5
SMBA
~ 977.51 ns
E5 Complete Uncertainty Region (E5-CUR)
E5 E5 E5 E5
E1
1° step
2° step
E1 Reduced Uncertainty Region (E1-RUR)
E5-E1
SMBA
H1E5~ 97.751 ns
H1E1~ 977.51 ns
1ms 1ms 1ms 1ms
E5 Complete Uncertainty Region (E5-CUR)
E5 E5 E5 E5
E1
1° step
2° step
E1 Reduced Uncertainty Region (E1-RUR)
E5-E1
SMBA
H1E5~ 97.751 ns
H1E1~ 977.51 ns
E5 Complete Uncertainty Region (E5-CUR)
E5 E5 E5 E5
E1
1° step
2° step
E1 Reduced Uncertainty Region (E1-RUR)
E5-E1
SMBA
H1E5~ 97.751 ns
H1E1~ 977.51 ns
1ms 1ms 1ms 1ms
Code epoch of the slave signal
E5 can be searched inside a
RUR of length:
51051
5 chipsERc
RcE
E
ERUR
The Synchronization in E1 slave
signal need distinguish the start of
the primary code between four
macro-hypotheses.
1415
1 chipsET
TE
Ecode
EcodeRUR

Analytical Overall Mean Acquisition Time: Unidirectional Information Flow (UD)
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 15
Master
Search
Master
Error
Master
ACQ
URMfURMf TP
DM
TP
EM zPzP
)1(
PMTz
URMf TP
DM zP
Slave
Search
Slave
Error
Slave
ACQ
URSfURSf TP
DS
TP
ES zPzP
)1(
PSTz
URSf TP
DS zP
CBTz
•The acquisition procedure can be modeled as a Markov Chain: • Represented by the associated Flow Graph
• MAX criterion: the entire uncertainty region is scanned by choosing the largest detection variable
•PDM = Master Band Probability of Detection •PDS = Slave Band Probability of Detection •Pf = Processing Factor •TURM = Master Signal Uncertainty Region •TPM= Master Penalty Time •TURS= Slave Band Uncertainty Region •TPS= Slave Penalty Time
)1)(1()(
)(
PSURSfPMURMf
CBURSURMf
TTP
ES
TTP
EM
TTTP
DsDMA
zPzP
zPPzP
DSDM
PSPMDMPMURMfDSPSURSfDM
CB
z
AUD
PP
TTPTTPPTTPPT
dz
zdPOMAT
))(()(
)(
1

Results: UD performance timing
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 16
1
10
100
1000
10000
Mean
Ac
qu
isit
ion
Tim
e [
msec]
E1 C/No [dBHz]
CBA E5-E1, Timing Errors (UD)
CBA E5-E1, no Timing Errors (UD)
CBA E1-E5, Timing Errosr (UD)
CBA E1-E5, no Timing Errors (UD)
E1&E5 Timing Errors
E1&E5 no Timing Errors
35 37 40 42 45 50
40 42 45 47 50 55 E5 C/No [dBHz]
4. 000978 ms

24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 17
Analytical Mean Acquisition Time: Bi-directional Information Flow (BD)
Master
Search
Slave
Search
“Full”
Slave
Error
Master /Slave
ACQ
URSf TP
DS zP
URSf TP
mDS zPP
)1(
Slave
Search
“Empty”
Slave
Error
PSTz
CBURMf TTP
DM zP
)1(
CBURMf TTP
DM zP
URSf TP
r zP
)1(
URSf TP
m zP
URSf TP
r zP
PSTz
• PDM = Master Band Probability of Detection
• PDS = Slave Band Probability of Detection
• Pf = Processing Factor
• TURM = Master Signal Uncertainty Region
• TPM= Master Penalty Time
• TURS= Slave Band Uncertainty Region
• TPS= Slave Penalty Time
DSDM
DSDMPSURSURMfCB
z
ABD
PP
PPTTTPT
dz
zdPOMAT
)1()(
)(
1
Analytical Overall Mean Acquisition Time: Bi-directional Information Flow (BD)
1)1(10 EcodeacqEP TT
5)5(10 EcodeacqEP TT

Results: BD performance timing
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 18
1
10
100
1000
10000
Mean
Ac
qu
isit
ion
Tim
e [
msec]
E1 C/No [dBHz]
CBA E1-E5 no Timing Errors (BD)
CBA E1-E5 Timing Errors (BD)
CBA E5-E1 no Timing Errors (BD)
CBA E5-E1 Timing Errors (BD)
E1&E5 no Timing Errors
E1&E5 Timing Errors
40 45 50 55
E5 C/No [dBHz]
35 40 45 50
4.000978 ms

Performance Comparison: UD Vs BD
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 19
1
10
100
1000
10000
Mean
Ac
qu
isit
ion
Tim
e [
msec]
E1 C/No [dBHz]
CBA E1-E5 no Timing Errors (UD)
CBA E1-E5 Timing Errors (UD)
CBA E1-E5 no Timing Errors (BD)
CBA E1-E5 Timing Errors (BD)
CBA E5-E1 no Timing Errors (UD)
CBA E5-E1 Timing Errors (UD)
CBA E5-E1 no Timing Errors (BD)
CBA E5-E1 Timing Errors (BD)
40 45 50 55 E5 C/N0 [dBHz]
35 40 45 50

CODE TRACKING AIDING TECHNIQUES
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 20

Code Tracking
• Refine the coarse values of code phase and frequency
• Keep track of the signal properties over time
• Necessary for pseudorange estimation
• Code tracking
• usually based on a feedback scheme
identified as Delay Lock Loop (DLL)
• Carrier tracking
• either tracking the phase or the
frequency
21
Local
Oscillator
90°
Primary Code
Generator
Incoming
Signal
E
E
L
L
IE
IL
QE
QL
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Tracking Aiding Techniques
• Motivation: • Improve tracking loops ability to stay locked in the presence of
• Multipath
• Ionospheric scintillation
• Noise
• High receiver dynamics
• Improve timing estiation precision
• Goal: Robust Code Tracking for GNSS signals
• Solutions: Vector Tracking
Ultratight Integration
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 22

Vector Tracking Functioning
• User position and velocity are used to predict code phase and carrier frequency
• Combines tracking and navigation processing
• All received signals are processed together
• Feedback provided by the navigation processor
• Characteristics: • Noise reduction
• Robustness to temporary blockages
• Better optimization
• Performance improvement with respect to scalar loops
• Errors in one channel can affect other channels
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 23
Correlators Discriminator
NCO Code
Generator
Incoming
Signal
Navigation
Processor
...
Correlators Discriminator
NCO Code
Generator feedback
path
feedback
path

VDLL Implemetation
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 24
• Additional states in the estimation filter require additional measurements
• Atmospheric error and satellite clock errors predictions can be extracted from the broadcasted navigation data
F H
z-1
Corrections (sat position, clock errors, ionosphere)
S
z-1
atmospheric bias,
sat clock bias
X~
X̂
j
i 1ˆ
t
j
it
1ˆˆˆ
ii XXX
j
i
j
i 1ˆ
tttj
i
j
i 1ˆˆˆ
ttt
Ultra-tight Code Tracking
• Motivation: • improve tracking loops ability to stay locked
• improve timing estiation precision
• Inertial Sensors: • Autonomous Navigation Systems → Robustness against signal outages and jamming
• High update rate
• Precision that degrades with time
• Goal: Robust Code Tracking for GNSS signals
• Solution: Ultra-tight Integration
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 25

GAUSS Ultra-tight integration • The Gaussian AUtocorrelation Scaled Sum (GAUSS) scheme:
• An artificial autocorrelation peak is generated from INS information
• The two sets of autocorrelation are summed non-coherently each scaled by its Mean Square Error (MSE)
2
2
2
)(
22
1)( INS
INSt
INS
etG
delay estimated by the INS
variance selected according to the early-late spacing
Local
Oscillator
90°
Primary Code
Generator
Incoming
Signal
E
E
L
L
IE
IL
QE
QL
Estimated Delay
From INSGaussian
Generator
GE
GL
Discriminator
σ2GNSS σ2
INS
DGAUSS
INSGNSS
INSGNSSGNSSINSGAUSS
MSEMSE
DMSEDMSED
26 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

GAUSS concept
27 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

GAUSS results
28
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
0 20 40 60 80 100 120 140 160 180 200
Iterations
Ch
ips
Tracking Estimation GNSS stand alone
GAUSS Ultra-Tight Tracking Estimation Te=20 s
GAUSS Ultra-Tight Tracking Estimation Te=200 s
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

International Projects
• ESA-TT&C-I (Spread Spectrum Codes suitable for Mono-mode TT&C Transponders)
• ESA-P2P (Distributed and cooperative positioning innovative GNSS applications)
• EU-GAMMA-A (Galileo Receiver for Mass Market Applications in the Automotive Area)
• TAS-I (Study of GNSS Software Radio Receivers)
29 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Publications
• [1] F. Bastia, L. Deambrogio, C. Palestini, M. Villanti, R. Pedone, and G.E. Corazza - “Hierarchical Code Acquisition for Dual Band GNSS Receivers”, Position Location and Navigation Symposium (PLANS2010), May 3-6, 2010, Palm Springs, California.
• [2] C. Palestini, L. Deambrogio, F. Bastia, and G. E. Corazza - “An Insider View on Tracking Loops: a Novel Ultra-Tight GNSS/INS Hybridization Approach”, Position Location and Navigation Symposium (PLANS2010), May 3-6, 2010, Palm Springs, California.
• [3] I. Thibault, G. E. Corazza and L. Deambrogio - “Random, Deterministic, and Hybrid Algorithms for Distributed Beamforming”, Advanced Satellite Multimedia Systems Conference (ASMS/SPSC 2010), September 13-15, 2010, Cagliari, Italy.
• [4] L. Deambrogio, C. Palestini, F. Bastia, G. Gabelli and G. E. Corazza “Impact of High-End Receivers in a Peer-To-Peer Cooperative Localization System”, Ubiquitous Positioning, Indoor Navigation and Location-Based Service (UPINLBS 2010), October 14-15, 2010, Kirkkonummi, Finland.
• [5] I. Thibault, G. E. Corazza and L. Deambrogio – “Phase Synchronization Algorithms for Distributed Beamforming with Time Varying Channels in Wireless Sensor Networks”, International Wireless Communications and Mobile Computing Conference (IWCMC 2011), July 5-8, 2011, Istanbul, Turkey.
• [6] L. Deambrogio, F. Bastia, C. Palestini, M. Villanti, R. Pedone and G. E. Corazza – “Cross-Band Aided Code Acquisition in Dual Band GNSS Receivers” submitted to IEEE Trans. on Aerospace and Electronic Systems, November 2011.
• [7] G. Gabelli, L. Deambrogio, C. Palestini, F. Bastia, G. E. Corazza and J. Samson – “Cooperative Code Acquisition based on the P2P Paradigm”, ION International Technical Meeting (ION ITM 2012), January 30- February 1, 2012, Newport Beach, California.
• [8] L. Deambrogio, O. Julien, C. Macabiau, G. E. Corazza – “Improvement of Carrier Tracking Robustness in the Presence of Degraded GNSS Signals using Vector Tracking Loops”, Abstract accepted to Position Location and Navigation Symposium (PLANS2012), April 23-26, 2012, Myrtle Beach, South Carolina.
30 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Short Courses
• NEWCOM++ Winter School, 2-6 Febbraio 2009, Aachen, Germania
• Short-Range Positioning Systems: Fundamentals and Advanced Research Results with Case Studies, 5-6 March 2009, Bologna
• GPS/INS Multisensor Kalman Filter Navigation, 10-14 Maggio 2009, Parigi, Francia
• SatNEx Summer School, 27-31 Luglio 2009, Salisburgo, Austria
• Heterogeneous wireless networks: architectures, Qos performance and applications, 9 e 11 Settembre 2009, Bologna
• Aster DOC, 5-10 Luglio 2010, Bologna
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 31

Enabling Techniques and Algorithms for Integrated Communication
and Navigation Satellite Systems
PhD Candidate: Lina Deambrogio
Supervisor: Prof. Giovanni E. Corazza

POSITION LEVEL TECHNIQUES
24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 33

Position Level Aiding
• Motivation: • improve positioning solution availability
• improve accuracy
• Inertial Sensors: • Autonomous Navigation Systems → Robustness against signal outages and jamming
• High update rate
• Precision that degrades with time
• P2P cooperation: • Peers in a network have positions correlated to each other
• Goal: Availability and Accuracy improvements in positioning
• Solution: Loose/Tight Integration
P2P positioning
34 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems

Motivation
• The P2P paradigm: • Peers belonging to the same network
have positions and velocities that are correlated to each other
• Exploitation of direct communication links among nodes in a network used to exchange aiding information
• Increased positioning capabilities especially in those scenarios where triangulation would be impossible for a single user
18-10-2010 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems 35

• Different solutions • GNSS-data only Algorithm (exchange of pseudorange measurements)
• Hybrid Algorithm (exchange of terrestrial ranging information)
• Method:
• Extended Kalman Filter
• Goal: • GNSS-data only → Improve service availability
• Hybrid → Improve accuracy
P2P Positioning
36 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems
Project position
estimates
ahead of time to the
next time step
Accept measurements
and update estimates
accordingly
Input
measurements
Output
estimations
•Position
• Velocity
• Clock bias
• Direct measurements:
pseudorange to visible
satellites
• Aiding information:
additional pseudoranges
of neighboring peers to
non visible satellites
GNSS-data only
Kalman filter

P2P Positioning Results
895690
895700
895710
895720
895730
895740
895750
895760
4469140 4469150 4469160 4469170 4469180 4469190
Y-e
cef
[me
ter]
X-ecef [meter]
GNSS-Data Only Exchange
Real Mass-Market AidingPeer Position
Calculated UserPosition
Real User Position
37 24-01-2012 - Enabling Techniques and Algorithms for Integrated Communication and Navigation Satellite Systems