emergent behavior in biological swarms stephen motter
TRANSCRIPT
Emergent Behavior in Biological Swarms
Stephen Motter

The Papers
• The Self-Organizing Exploratory Pattern of the Argentine Ant
• Study of Group Food Retrieval by Ants as a Model for Multi-Robot Collective Transport
1
Paper 1
• Authors:– J. L. Deneubourg– S. Aron– S. Goss– J. M. Pasteels
• Appeared in the Journal of Insect Behavior, 1990
The Self-Organizing Exploratory Pattern of the Argentine Ant
2
Problem
• How do ants explore?– Rather, how is a single ant’s exploration
affected by the previous ants? Is it a function? Can we model it?
• Homogenous/heterogeneous agents?
Paper 1 CritiqueResultsExperime
ntApproachInsights
Problem Statement
3
InsightsProblem
• Ants explore with no fixed destination.
• They do this at night (so no visual cues).
• The Argentine ant lays her pheromone continuously (not just on return).
Paper 1 CritiqueResultsExperime
ntApproach
Insights
4
ApproachProblem
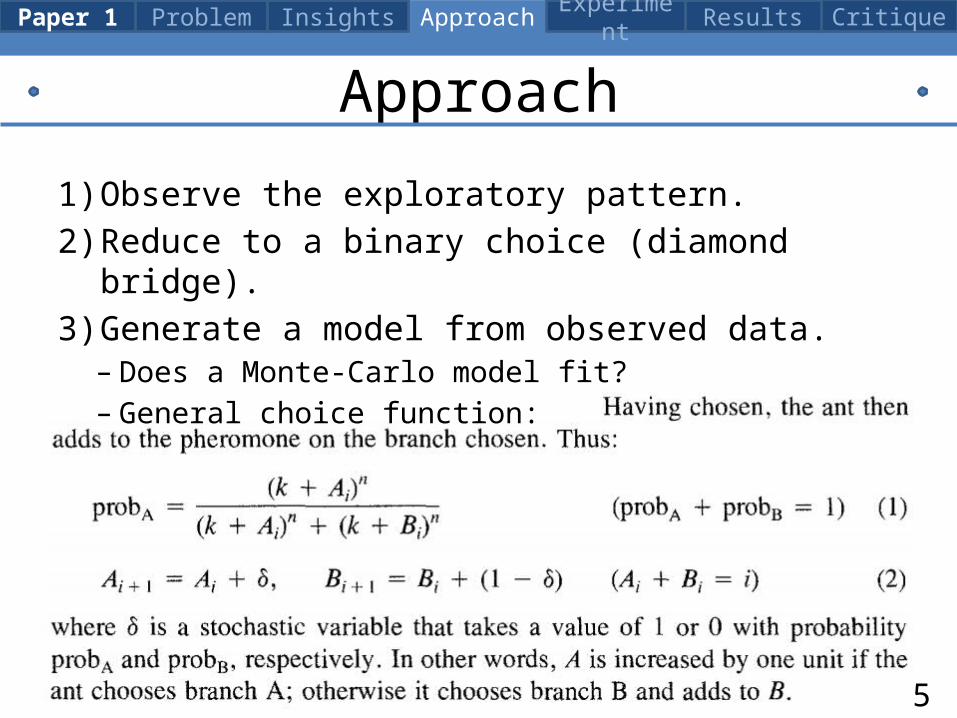
1) Observe the exploratory pattern.2) Reduce to a binary choice (diamond
bridge).3) Generate a model from observed data.– Does a Monte-Carlo model fit?– General choice function:
Paper 1 CritiqueResultsExperime
ntInsights
Approach
5
Experiment
Problem
• This experiment has two parts.
• Empty arena (no food or debris).
• Automatically photographed every 60 seconds.
• Sand periodically replaced.
Paper 1 CritiqueResultsApproachInsights
Experiment (Open Arena)
Note: This is an artist’s rendition of the experiment, as no image of the arena was provided by the authors. 6
Experiment
Problem
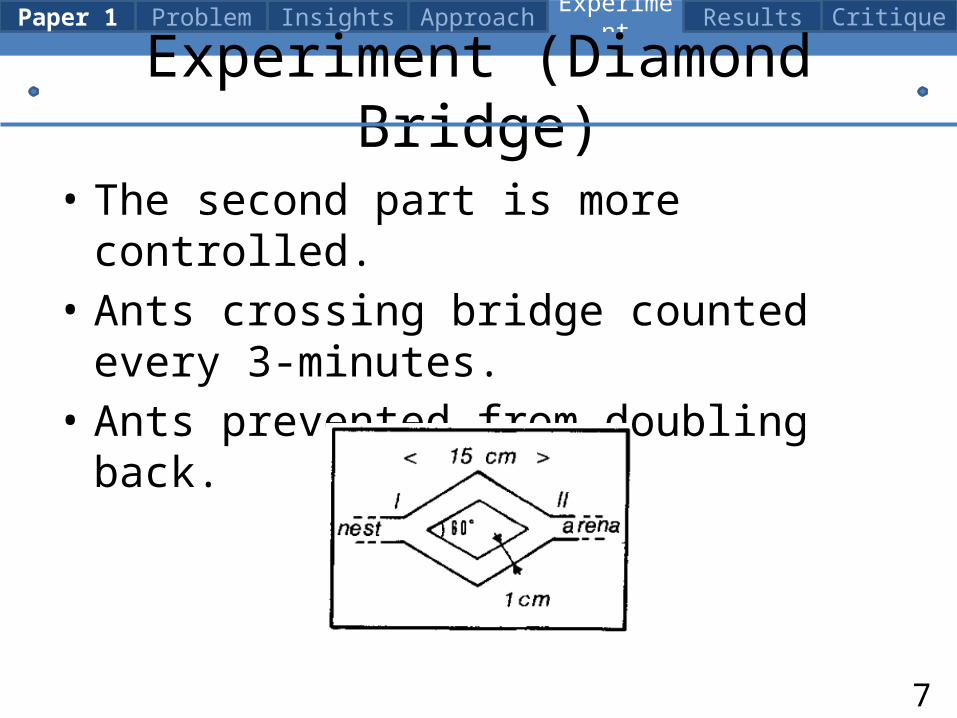
• The second part is more controlled.• Ants crossing bridge counted every
3-minutes.• Ants prevented from doubling back.
Paper 1 CritiqueResultsApproachInsights
Experiment (Diamond Bridge)
7
ResultsProblem
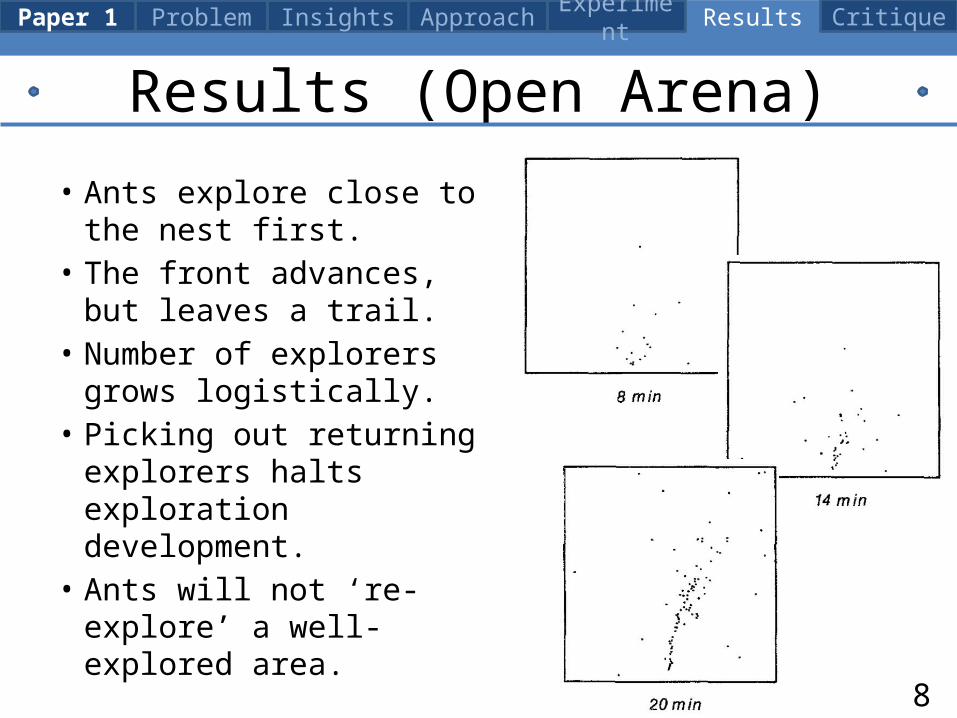
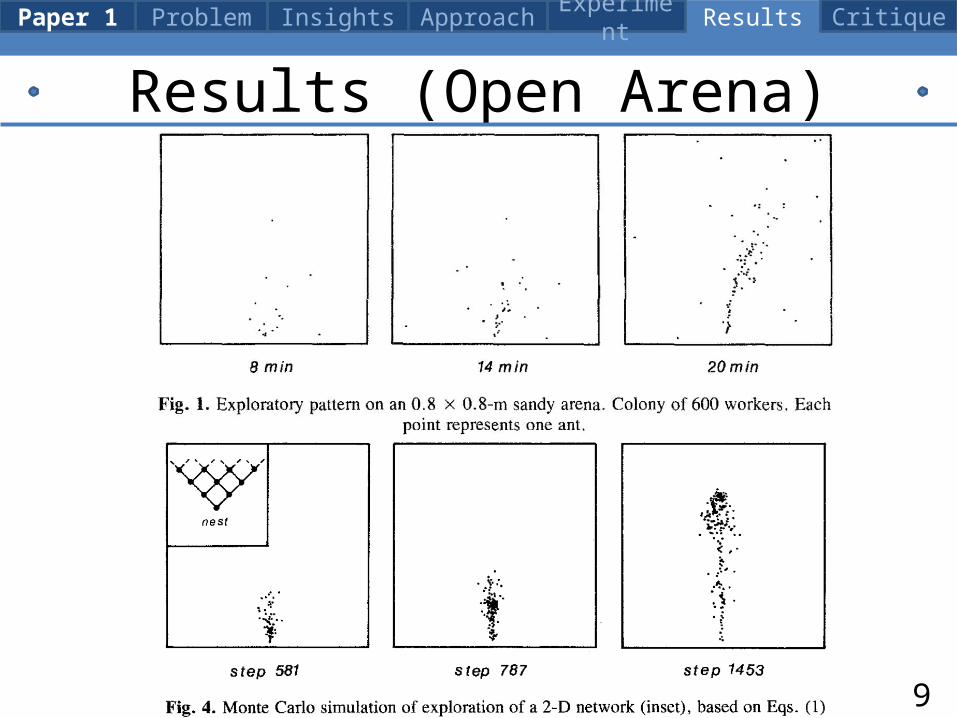
• Ants explore close to the nest first.
• The front advances, but leaves a trail.
• Number of explorers grows logistically.
• Picking out returning explorers halts exploration development.
• Ants will not ‘re-explore’ a well-explored area.
Paper 1 CritiqueExperime
ntApproachInsights
Results (Open Arena)
8
ResultsProblemPaper 1 CritiqueExperime
ntApproachInsights
Results (Open Arena)
9
ResultsProblem
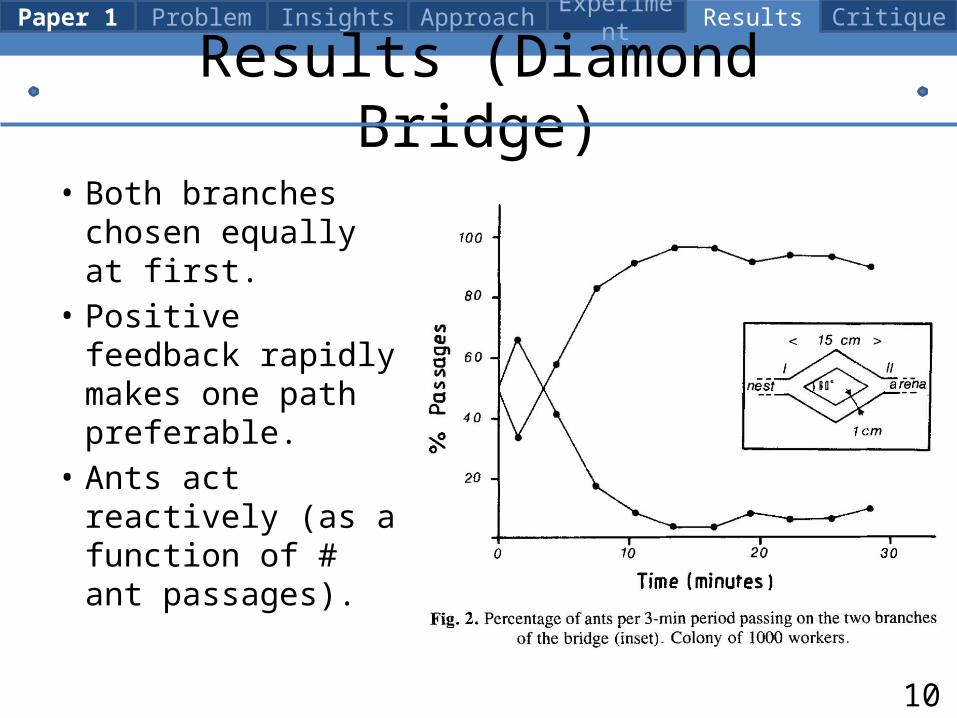
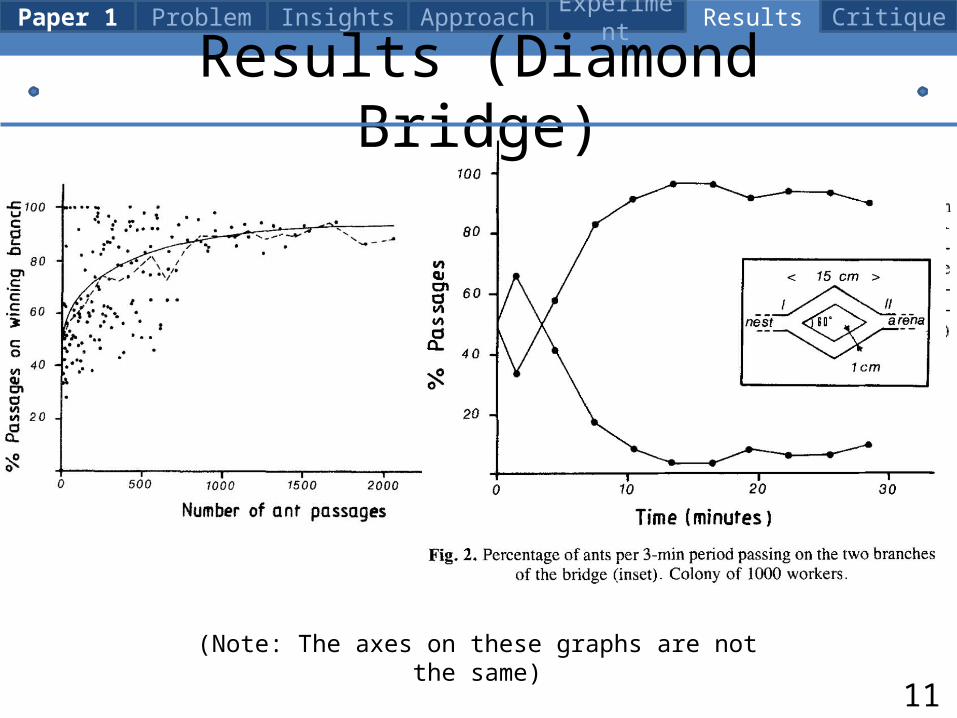
• Both branches chosen equally at first.
• Positive feedback rapidly makes one path preferable.
• Ants act reactively (as a function of # ant passages).
Paper 1 CritiqueExperime
ntApproachInsights
Results (Diamond Bridge)
10
ResultsProblemPaper 1 CritiqueExperime
ntApproachInsights
Results (Diamond Bridge)
11
(Note: The axes on these graphs are not the same)
CritiqueProblem
• The model fits, but a lot of simplifications are required.
• Pheromone quantity estimated by number of ants passing (ignores evaporation, assumes each ant lays equal amount of pheromone).
• The ‘separated ants’ appear more dispersed in experiments than model.
Paper 1 ResultsExperime
ntApproachInsights
Critique
12
Paper 2Study of Group Food Retrieval by Ants as a Model for Multi-Robot
Collective Transport• Authors:– S. Berman– Q. Lindsey– V. Kumar–M. S. Sakar– S. C. Pratt
• Appeared in the Proceedings of the IEEE, 2011
13

Problem
• What is the role of each ant in collective transport? Rules that govern their actions?
• Can we apply this to robots who, like ants. have limited sensing, communication, and computation capabilities?
Paper 2 CritiqueResultsExperime
ntApproachInsights
Problem Statement
14
InsightsProblem
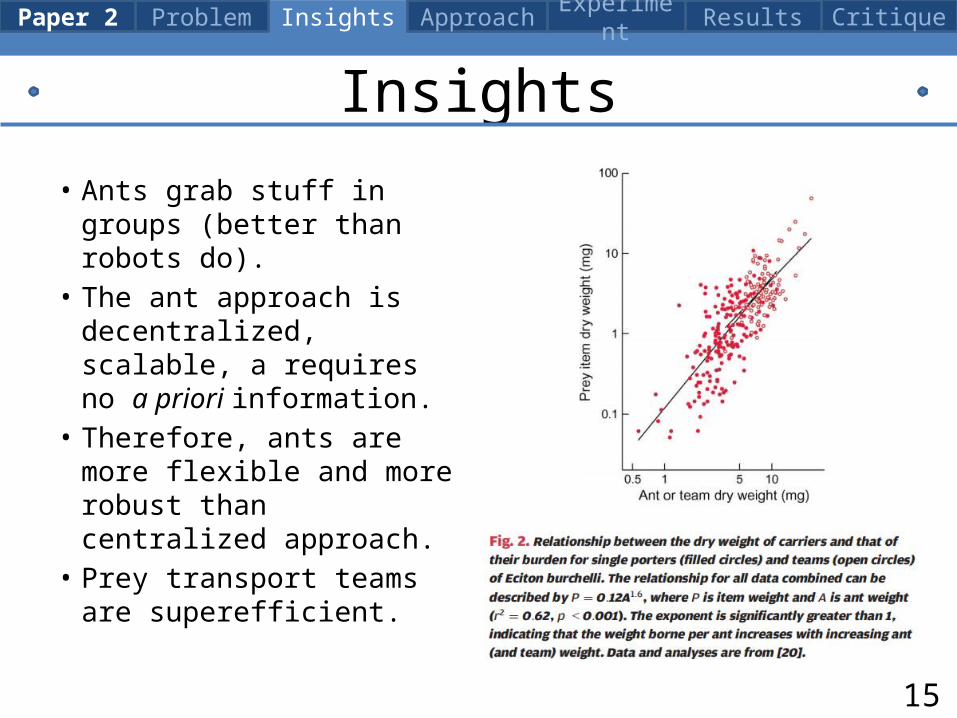
• Ants grab stuff in groups (better than robots do).
• The ant approach is decentralized, scalable, a requires no a priori information.
• Therefore, ants are more flexible and more robust than centralized approach.
• Prey transport teams are superefficient.
Paper 2 CritiqueResultsExperime
ntApproach
Insights
15
ApproachProblem
1) Observe ants in a controlled environment.
2) Develop a behavior model.3) Run a simulation to see if the model
matches.
Paper 2 CritiqueResultsExperime
ntInsights
Approach
16
Experiment
Problem
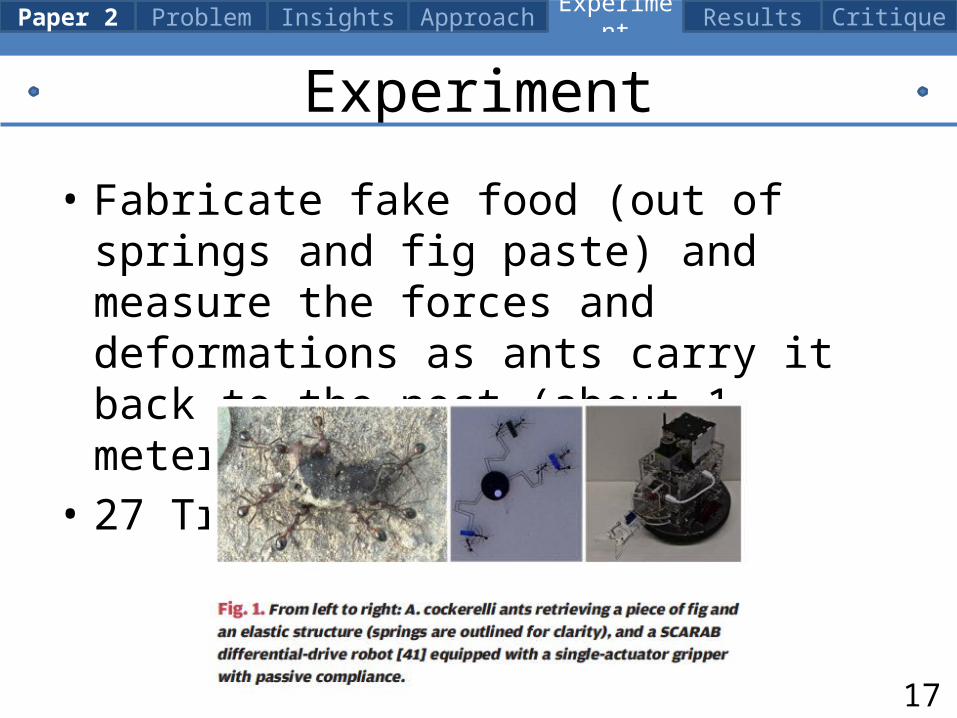
• Fabricate fake food (out of springs and fig paste) and measure the forces and deformations as ants carry it back to the nest (about 1 meter).
• 27 Trials
Paper 2 CritiqueResultsApproachInsights
Experiment
17
18
ResultsProblemPaper 2 CritiqueExperime
ntApproachInsights
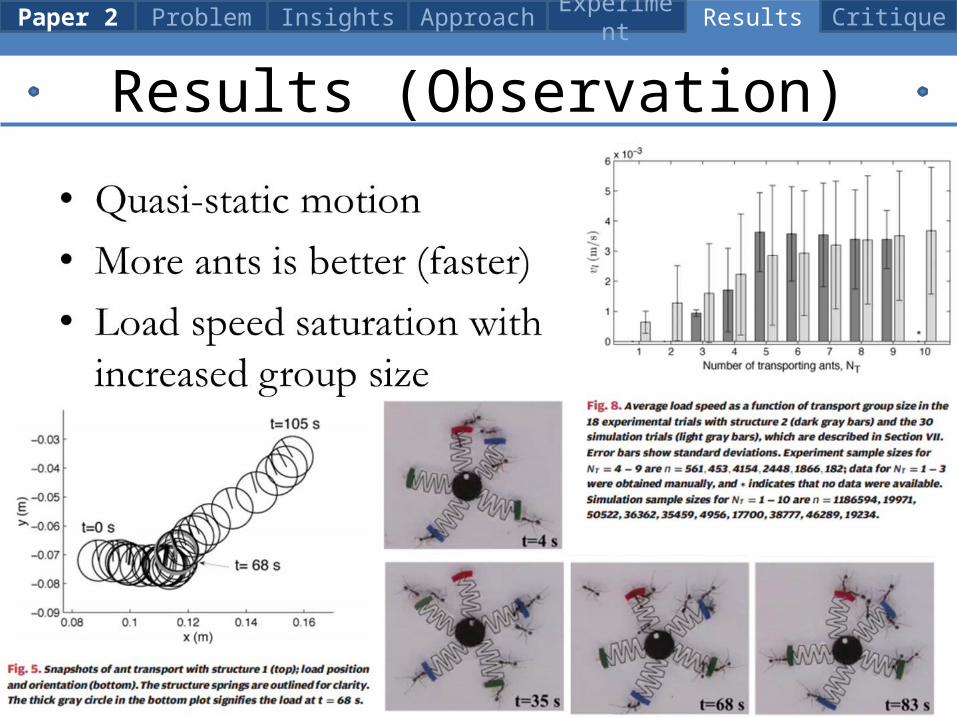
Results (Observation)
• Quasi-static motion• More ants is better
(faster)• Load speed saturation
with increased group size
ResultsProblem
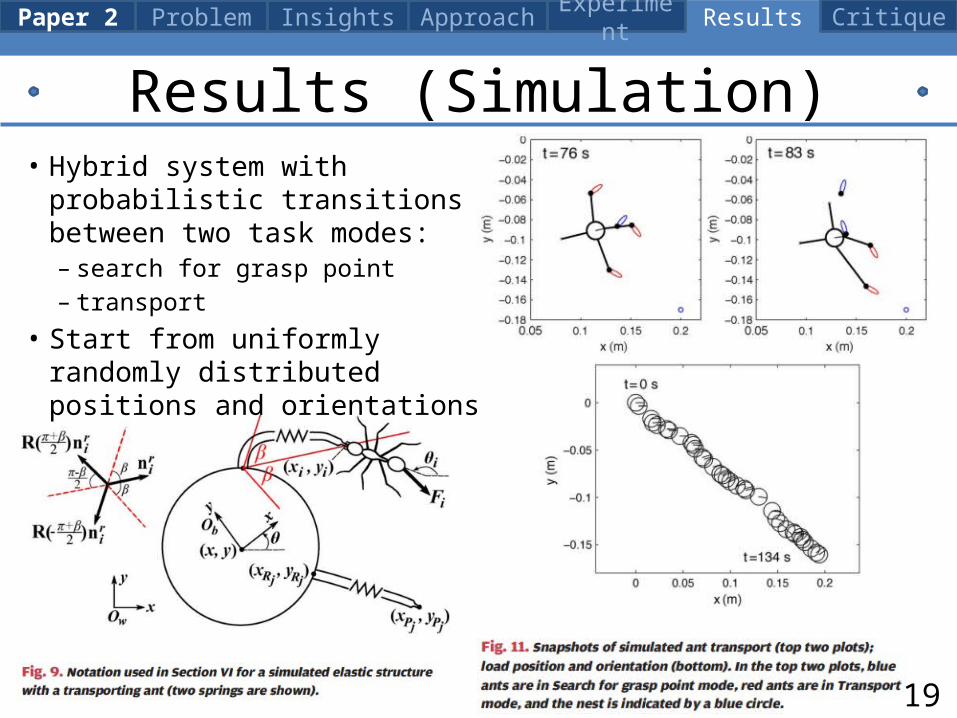
• Hybrid system with probabilistic transitions between two task modes:– search for grasp point– transport
• Start from uniformly randomly distributed positions and orientations
Paper 2 CritiqueExperime
ntApproachInsights
Results (Simulation)
19
CritiqueProblem
• Friction is a major factor which throws the deformation measures off.
• They even observe “stick-slip” motion.
Paper 2 ResultsExperime
ntApproachInsights
Critique
20
Closing Thoughts
• Both use ants as a model of homogenous agents and minimal communication.
• Both attempt to apply lessons from ants to distributed robotics.
• Both simulations use very simple models, while still being reasonably accurate.
21
Questions?
• The Self-Organizing Exploratory Pattern of the Argentine Ant
• Study of Group Food Retrieval by Ants as a Model for Multi-Robot Collective Transport
22