eliminating timing penalty of scan experiment results (1)
DESCRIPTION
reducing test timeTRANSCRIPT

Eliminating Timing Penalty Of Scan
By
S.Rajesh
13181J5012
Guide
Mr. N.Subbaiah

Overview
• Fundamentals of DFT
• Eliminating Timing Penalty of Scan

Fundamentals of DFT
• Terminology
• Fault Models
• Testability Analysis
• Ad Hoc Approach
• Structured Approach
• Scan Architectures

Terminology
• Controllability : It is defined as difficulty is setting a particular signal logic level to 0 or 1 .
• Observability : It is defined as difficulty in observing the state of a particular signal.
• Fault Simulation : Evaluating the effectiveness of a particular pattern set is known as fault simulation.

Fault Models
• Defect : A defect in an electronic design is the unintended difference between the implemented hardware and its intended design.
• Error : A wrong signal output generated by a defective system is called an error. An ‘error‘ is a ‘effect’ whose cause is some ‘defect’.
• Fault Model : A representation of a ‘defect’ at an abstract level is known as ‘Fault Modeling’.

Fault Models
• Stuck-at Faults
• Transistor Faults
• Transition Faults
• Path Faults
• Analog Faults

Single Stuck-At Fault Model
• Properties of the Fault Model
1. Fault can be at the input or output of the gate.
2. Fault line is permanently set to 0 or 1 .
3. Only one line is faulty.

Single Stuck-At Fault Model
AND
OR 0 1
0
1

Why not Multiple Stuck-At Faults.
• Usually, several stuck-at faults can be simultaneously present in the circuit.
• A circuit with ‘w’ nets could have a possible of 3ʷ-1 fault combinations i.e, s-a-1, s-a-0, fault free.
• Even a moderate ‘w’ will result in enormous number of multiple stuck at faults.

Testability Analysis
This analysis provides a report on how easy is it to control and observe the nodes.
• SCOAP Testability Analysis
• Probability-Based Testability Analysis
• Simulation-Based Testability Analysis

SCOAP
• SCOAP – Scandia Controllability and Observability Analysis Program.
• Sequential Measures : – SC0 : Controllability of 0 – SC1 : Controllability of 1 – SO : Observability of a State
• Combinational Measures : – CC0 : Controllability of 0 – CC1 : Controllability of 1 – CO : Observability of a State

SCOAP
AND
OR 2/3/2 1/1/4
1/1/3 4/2/0
1/1/4
0 Controllability ( CC0 ) 1 Controllability ( CC1 )
PI 1 1
AND Min ( input 0 controllabilities ) + 1 Ʃ ( input 1 controllabilities ) + 1
OR Ʃ ( input 0 controllabilities ) + 1 Min ( input 1 controllabilities ) + 1
Observability ( CO )
PO 0
AND Ʃ ( output observability, CC1 of other inputs ) + 1
OR Ʃ ( output observability, CC0 of other inputs ) + 1

Design for Testability
• Ad Hoc
– Test Point Insertion
– Test logic Insertion
• Structured Approach
– Scan design

Scan Design
Types of Scan Cells :
• Mux Scan
• Clocked Scan
• Level Sensitive Scan Design

Mux Scan

Scan Architectures
• Full Scan
• Partial Scan
• Random Access Scan

Transition Faults
• Fault Model :
0 – 1 : Slow to Rise
1 – 0 : Slow to Fall
• Number of Stages to Find a fault : Initialization Launch of Transition

ATPG for At-Speed Faults
• Launch of Capture

ATPG for At-Speed Faults
• Launch of Shift

Comparison of LOS and LOC

Comparison of LOS and LOC
• LOC Pattern Generation depends on functional logic of
present path and previous path which results in less controllability and hence less coverage.
Timing requirements for scan enable is not stringent.
• LOS Pattern Generation does not depend on previous
path logic and is more controllable and more test coverage.
Timing is stringent for scan enable.

Eliminating Timing Penalty of Scan Design
• Move the scan MUX off the critical path
• Additionally, 1 FF and 1 MUX inserted per transformation
• Transformation applied on only critical path sinks
• MUX delay moved elsewhere
D Q
S_in
F_in
S_out
F_out
original
D Q
Scan_en
shadow M
UX
MU
X
Sel_shadow
After transformation
D Q
Scan_en
S_in
F_in
S_out
F_out
original
MU
X
Before transformation

Performance Improvement • Scan penalty:
MUX-delay + fanout-delay
• Performance saving by this approach :
MUX-delay - fanout-delay

Scan Operation : Capture
Sel_Shadow = 1 Scan_en = 0
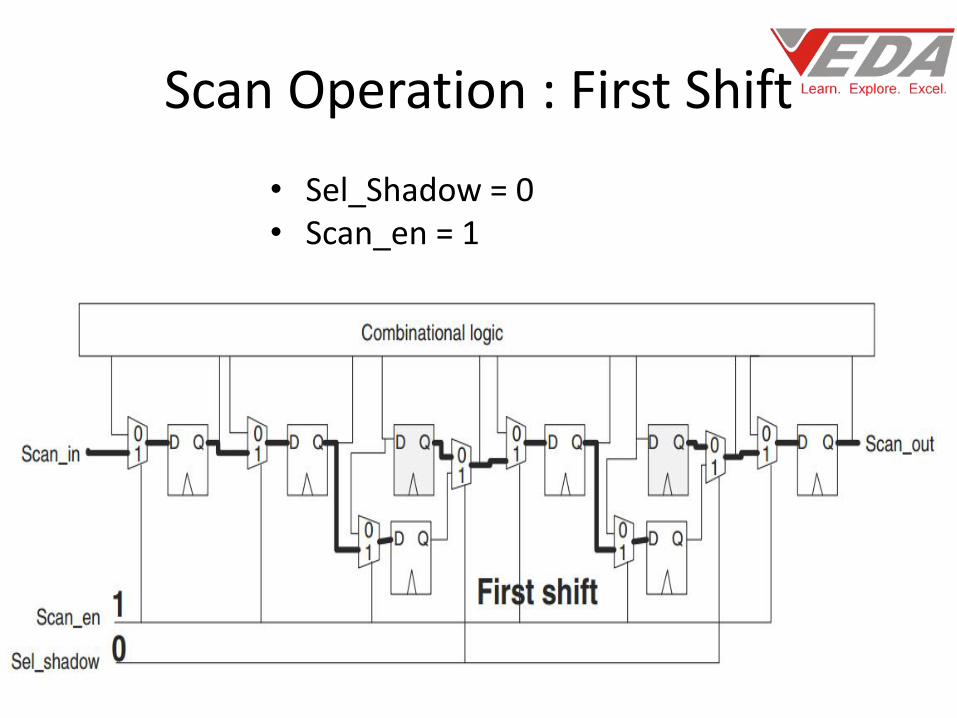
Scan Operation : First Shift
• Sel_Shadow = 0 • Scan_en = 1

Scan Operation : Remaining Shifts • Sel_shadow = 1 • Scan_en = 1

Experimental Results : • Timing Before inserting Scan
• Ordinary Mux Scan Design
• Modified Mux Scan Design
Critical Path Timing -0.957568 ns
Critical Path Timing after compile
-0.743518 ns
Stuck at test Coverage 100 %
Transition Test Coverage 96.80 %
Critical Path Timing 0.013416 ns
Critical Path Timing 0.002776 ns
Stuck at Test Coverage 99.82 %
Transition Test Coverage 94.23 %

Disadvantages
• If source and destination both are critical then the flop cannot be replaced.
• Hence we adopt partial scan, where flops in timing critical paths are specified as non scan instances.

Future Work
• Implement the design using partial scan and compare the results.
• Generate an efficient test set for partial scan design.
• Implement scan using both partial scan with modified flop with trade off in coverage and timing.

References
• “Scan and atpg process guide” by Mentor Graphics.
• “VLSI Test Principles and Architectures” by L.Wang, C.Wen and X.Wen .
• “Eliminating the Timing Penalty of Scan”by V D Agarwal and Sinanoglu.
• www.wikipedia.org
• www.edn.org