elementary landscape decomposition of the hamiltonian path optimization problem
TRANSCRIPT

1 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Elementary Landscape Decomposition of the Hamiltonian Path Optimization Problem
Darrell Whitley and Francisco Chicano
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
2 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
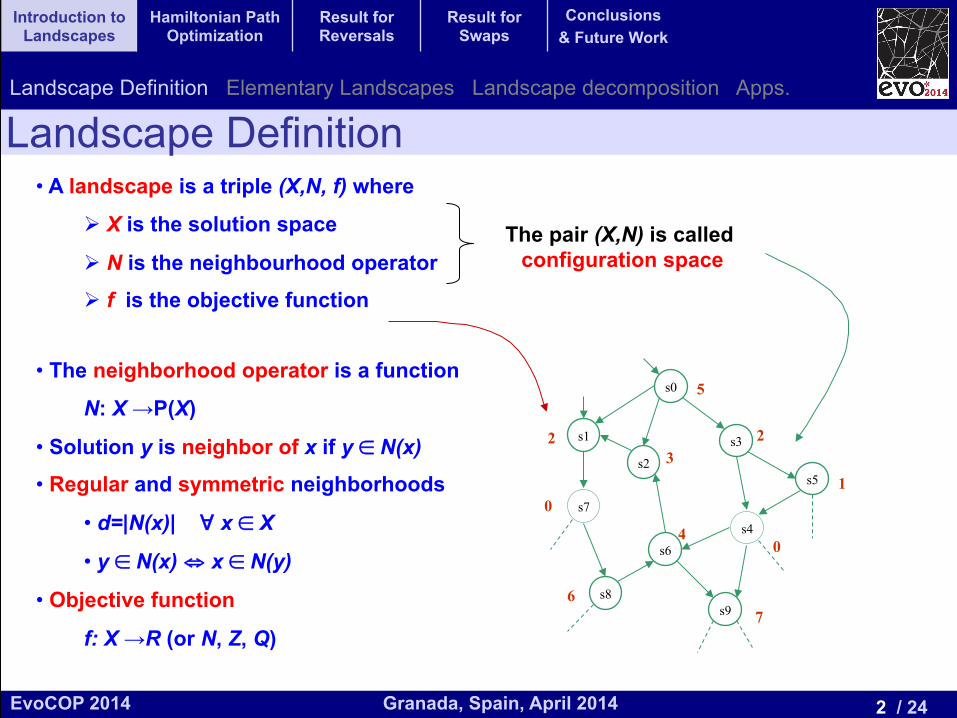
• A landscape is a triple (X,N, f) where
Ø X is the solution space
Ø N is the neighbourhood operator
Ø f is the objective function
Landscape Definition Landscape Definition Elementary Landscapes Landscape decomposition Apps.
The pair (X,N) is called configuration space
s0
s4 s7
s6
s2
s1
s8 s9
s5
s3 2
0
3
5
1
2
4 0
7 6
• The neighborhood operator is a function
N: X →P(X)
• Solution y is neighbor of x if y ∈ N(x)
• Regular and symmetric neighborhoods
• d=|N(x)| ∀ x ∈ X
• y ∈ N(x) ⇔ x ∈ N(y)
• Objective function
f: X →R (or N, Z, Q)
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work

3 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• An elementary function is an eigenvector of the graph Laplacian (plus constant)
• Graph Laplacian:
• Elementary function: eigenvector of Δ (plus constant)
Elementary Landscapes: Formal Definition
s0
s4 s7
s6
s2
s1
s8 s9
s5
s3
Adjacency matrix Degree matrix
Depends on the configuration space
Eigenvalue
Landscape Definition Elementary Landscapes Landscape decomposition Apps.
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
4 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
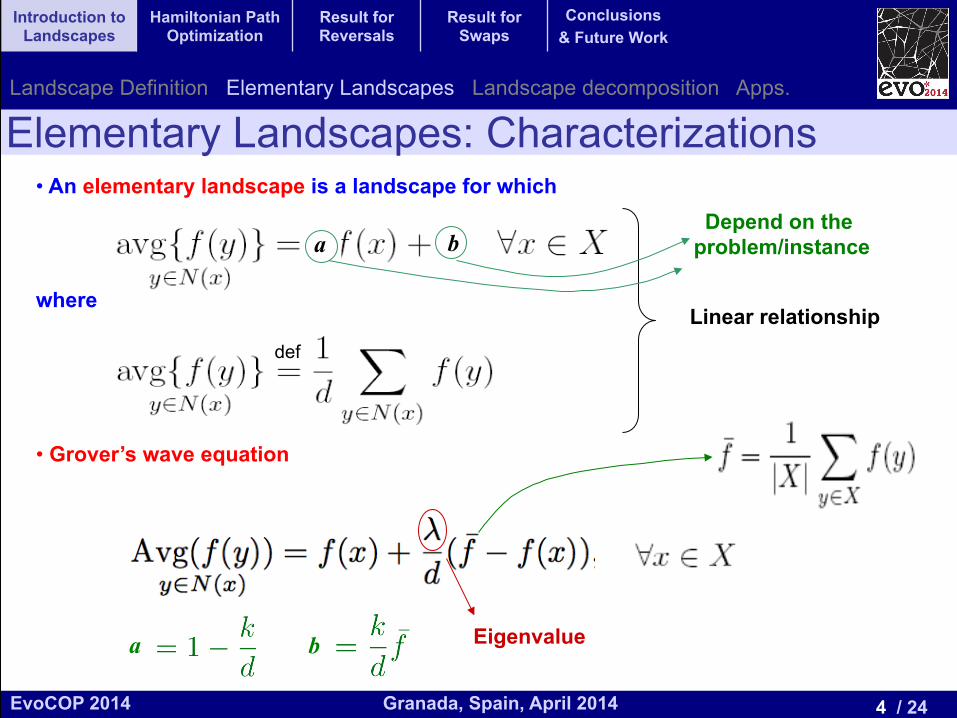
Elementary Landscapes: Characterizations
Linear relationship
• An elementary landscape is a landscape for which
where
• Grover’s wave equation
Eigenvalue
b a Depend on the
problem/instance
Landscape Definition Elementary Landscapes Landscape decomposition Apps.
def
a b
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work

5 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Elementary Landscapes: Examples Problem Neighbourhood d λ
Symmetric TSP 2-opt n(n-3)/2 n-1 swap two cities n(n-1)/2 2(n-1)
Antisymmetric TSP inversions n(n-1)/2 n(n+1)/2 swap two cities n(n-1)/2 2n
Graph α-Coloring recolor 1 vertex (α-1)n 2α Graph Matching swap two elements n(n-1)/2 2(n-1) Graph Bipartitioning Johnson graph n2/4 2(n-1) NEAS bit-flip n 4 Max Cut bit-flip n 4 Weight Partition bit-flip n 4
Landscape Definition Elementary Landscapes Landscape decomposition Apps.
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
6 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
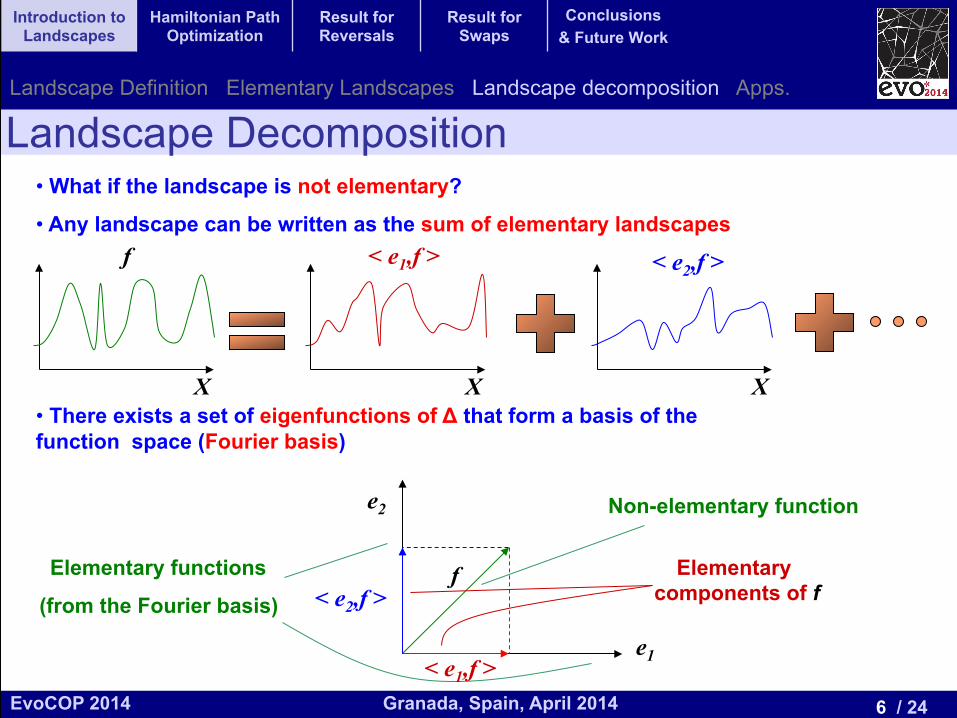
• What if the landscape is not elementary?
• Any landscape can be written as the sum of elementary landscapes
• There exists a set of eigenfunctions of Δ that form a basis of the function space (Fourier basis)
Landscape Decomposition Landscape Definition Elementary Landscapes Landscape decomposition Apps.
X X X
e1
e2
Elementary functions
(from the Fourier basis)
Non-elementary function
f Elementary components of f
f < e1,f > < e2,f >
< e2,f >
< e1,f >
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
7 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
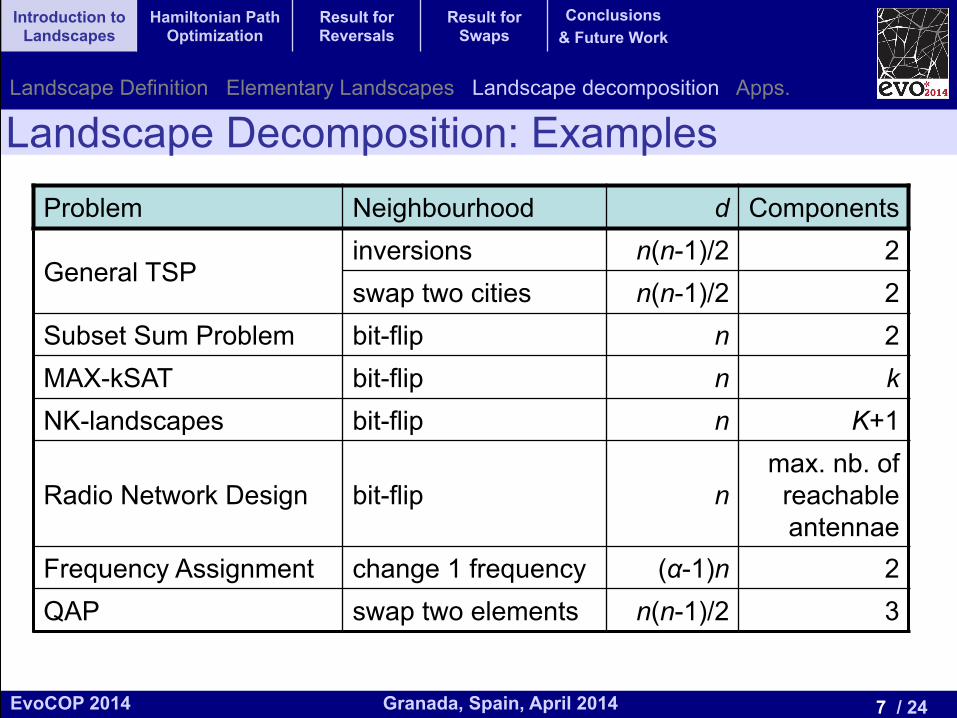
Landscape Decomposition: Examples Problem Neighbourhood d Components
General TSP inversions n(n-1)/2 2 swap two cities n(n-1)/2 2
Subset Sum Problem bit-flip n 2 MAX-kSAT bit-flip n k NK-landscapes bit-flip n K+1
Radio Network Design bit-flip n max. nb. of reachable antennae
Frequency Assignment change 1 frequency (α-1)n 2 QAP swap two elements n(n-1)/2 3
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Landscape Definition Elementary Landscapes Landscape decomposition Apps.

8 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• Selection operators usually take into account the fitness value of the individuals
• We could use the average fitness value in the neighborhood of a solution instead
Selecting by Average Fitness Value
X
Neighborhoods
avg avg
Minimizing
Fitness-based selection
Average-based selection
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Landscape Definition Elementary Landscapes Landscape decomposition Apps.

9 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• In elementary landscapes the traditional and the new operator are the same!
Recall that...
• However, they are not the same in non-elementary landscapes. If we have n elementary components, then:
• This selection strategy could be useful for plateaus Elementary components
X
Minimizing
avg avg
Fitness-based selection Average-based
selection
?
Selecting by Average Fitness Value
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Landscape Definition Elementary Landscapes Landscape decomposition Apps.

10 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• Let {x0, x1, ...} a simple random walk on the configuration space where xi+1∈N(xi)
• The random walk induces a time series {f(x0), f(x1), ...} on a landscape.
• The autocorrelation function is defined as:
• The autocorrelation length and coefficient:
• Autocorrelation length “conjecture”:
Autocorrelation
s0
s4 s7
s6
s2
s1
s8 s9
s5
s3 2
0
3
5
1
2
4 0
7 6
The number of local optima in a search space is roughly Solutions reached from x0
after l moves
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Landscape Definition Elementary Landscapes Landscape decomposition Apps.

11 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Hamiltonian Path Optimization (HPO) Definition Neighborhoods
• In TSP we search for a Hamiltonian circuit with minimal cost
• In HPO we search for a Hamiltonian path with minimal cost
• Applications:
• DNA fragment assembly (usually not solved as such)
• DNA linkage marker sequencing (solved as HPO)
6
1
2
3
5
4
(1,2,3,4,5)
6
1
2
3
5
4
(1,2,3,4,5)
↵
d
�
d
f̄ =�
↵+ �
X
c2C
w(c)
f(⇡) =n�1X
i=1
w⇡(i),⇡(i+1) + w⇡(n),⇡(1)
1
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work

12 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Neighborhoods • We investigate two different neighborhoods: (reduced) reversals and swaps
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
Reversal
The solutions for the HPO problem can be modeled as permutations, whichindicate in which order all the vertices are visited. Let us number all the verticesof the graph and let w be the weight matrix, which we will consider symmetric,where w
p,q
is the weight of the edge (p, q). The fitness function for HPO is:
f(⇡) =n�1X
i=1
w
⇡(i),⇡(i+1), (2)
where ⇡ is a permutation and ⇡(i) is the i-th element in that permutation. HPOis a subtype of a more general problem: the Quadratic Assignment Problem(QAP) [2]. Given two matrices r and w the fitness function of QAP is:
f
QAP
(⇡) =nX
i,j=1
r
i,j
w
⇡(i),⇡(j). (3)
We can observe that (3) generalizes (2) if w is the weight matrix for HPOand we define r
i,j
= �
j
i+1, where � is the Kronecker delta. HPO has applica-tions in Bioinformatics, in particular in DNA fragment assembling [10] and theconstruction of radiation hybrid maps [1].
4 Landscape for Reversals
Given a permutation ⇡ and two positions i and j with 1 i < j n, we canform a new permutation ⇡
0 by reversing the elements between i and j (inclusive).Formally, the new permutation is defined as:
⇡
0(k) =
⇢⇡(k) if k < i or k > j,⇡(j + i� k) if i k j.
(4)
Figure 1(a) illustrates the concept of reversal. The reversal neighborhoodN
R
(⇡) of a permutation ⇡ contains all the permutations that can be formed byapplying reversals to ⇡. Each reversal can be identified by a pair [i, j], which arethe starting and ending positions of the reversal. We use square brackets in thereversals to distinguish them from swaps. Then, we have |N
R
(⇡)| = n(n� 1)/2.In the context of HPO, where we consider a symmetric cost matrix, the
solution we obtain after applying the reversal [i, j] = [1, n] to ⇡ has the sameobjective value as ⇡, since it is simply a reversal of the complete permutation.For this reason, we will remove this reversal from the neighborhood. We willcall the new neighborhood the reduced reversal neighborhood, denoted with N
RR
to distinguish it from the original reversal neighborhood. We have |NRR
(⇡)| =n(n�1)/2�1. In the remaining of this section we will refer always to the reducedreversal neighborhood unless otherwise stated. The landscape analyzed in thissection is composed of the set of permutations of n elements, the reduced reversalneighborhood and the objective function (2). We will use the component modelexplained in the next section to prove that this landscape is elementary.
Swap
and all feasible locations j < i. When all possible values of j are considered,this causes all of the vertices in the permutation left of vertex v
i
to come into aposition adjacent to v
i
except for vi�1 which is already adjacent. Next consider a
cut at location i+1 (i is still fixed) and all feasible locations m > i+1. When allof the possible of value of m are considered all of the vertices in the permutationto the right of vertex v
i
are moved into a position adjacent to v
i
except v
i+1.Thus, in these cases v
i
does not move, but every edge not in the solution x
that is incident on vertex i is sampled once. Since this is true for all vertices, itfollows that every edge not in the current solution is sampled twice (� = 2): oncefor each of the vertices in which it is incident. Therefore, summing over all theneighbors: d ·Avg(f(y))
y2N(x) = d · f(x)� (n� 2)f(x)+ 2�P
c2C
w(c)� f(x)�.
Computing the average over the neighborhood and taking into account theresult of Lemma 2:
Avg(f(y))y2N(x)
= f(x)� n� 2
n(n� 1)/2� 1f(x) +
2
n(n� 1)/2� 1
X
c2C
w(c)� f(x)
!
= f(x) +n
n(n� 1)/2� 1(f̄ � f(x)).
ut
5 Landscape Structure for Swaps
Given a permutation ⇡, we can build a new permutation ⇡
0 by swapping twopositions i and j in the permutation. The new permutation is defined as:
⇡
0(k) =
8<
:
⇡(k) if k 6= i and k 6= j,⇡(i) if k = j,⇡(j) if k = i.
(5)
Figure 1(b) illustrates the concept of swap. The swap neighborhood N
S
(⇡) ofa permutation ⇡ contains all the permutations that can be formed by applyingswaps to ⇡. Each swap can be identified by the pair (i, j) of positions to swap. Thecardinality of the swap neighborhood is |N
S
(⇡)| = n(n� 1)/2. Unless otherwisestated, we will refer always to the swap neighborhood in this section.
We will analyze the landscape composed of the set of permutations of n
elements, the swap neighborhood and the objective function (2). The approachused for this analysis will be di↵erent than the one in the previous section.Instead of using the component model we will base our results in the analysis ofthe QAP landscape done in [6]. The reasons for not using the component modelwill be discussed at the end of the section.
5.1 Previous Results for QAP
According to Chicano et al. [6], the ELD of the QAP for the swap neighborhoodis composed of three components. The objective function analyzed in [6] is moregeneral than (3), it corresponds to the Lawler version of QAP [9]:
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
• We call it “reduced” reversals because we omit the reversal of the whole permutation
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Definition Neighborhoods
13 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
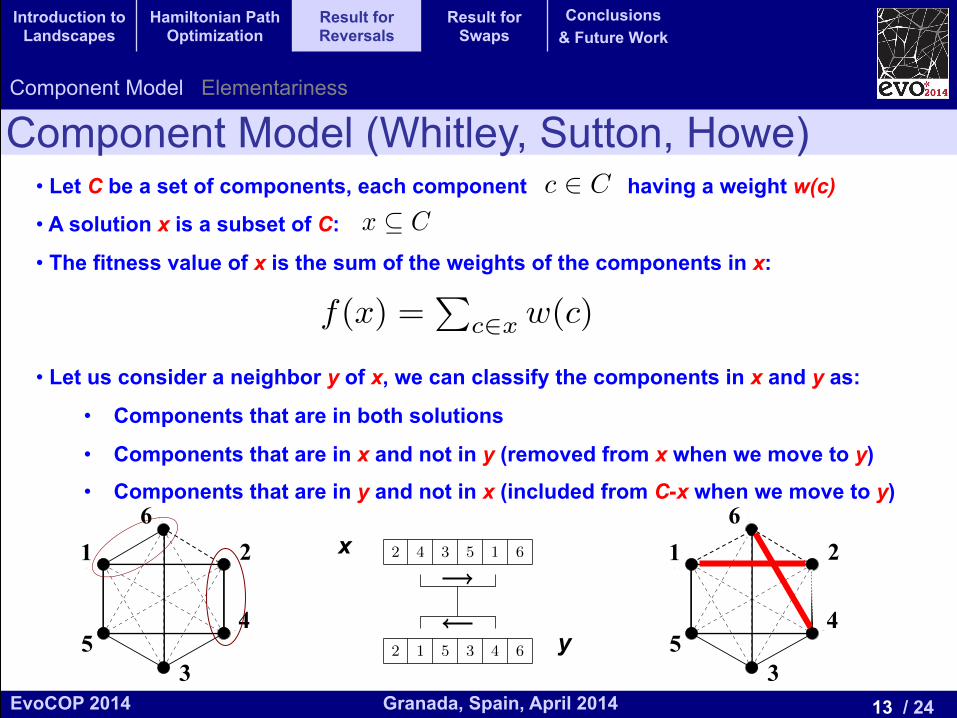
Component Model (Whitley, Sutton, Howe)
Component Model Elementariness
• Let C be a set of components, each component having a weight w(c)
• A solution x is a subset of C:
• The fitness value of x is the sum of the weights of the components in x:
• Let us consider a neighbor y of x, we can classify the components in x and y as:
• Components that are in both solutions
• Components that are in x and not in y (removed from x when we move to y)
• Components that are in y and not in x (included from C-x when we move to y)
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
6
1
2
3
5
4
(1,2,3,4,5)
1 2
3
4 5
6 6
1
2
3
5
4
(1,2,3,4,5)
1 2
3
4 5
6 x
y

14 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Component Theorem (Whitley, Sutton, Howe) • Let us assume that generating a symmetric neighborhood it happens that:
• All the components IN x are removed the same number of times, α
• All the components in C-x (OUT of x) are included the same number of times, β
• Then, the landscape is elementary
• And the wave equation is:
• where
6
1
2
3
5
4
(1,2,3,4,5)
1 2
3
4 5
6
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
2 4 3 5 1 6
2 1 5 3 4 6
(a) Reversal
2 4 3 5 1 6
2 1 3 5 4 6
(b) Swap
Fig. 1. Examples of reversal and swap for a permutation of size 6.
4.1 Component Model
Whitley and Sutton developed a “component” based model that makes it easy toidentify elementary landscapes [17]. Let C be a set of “components” of a problem.Each component c 2 C has a weight (or cost) denoted by w(c). A solution x ✓ C
is a subset of components and the evaluation function f(x) maps each solution x
to the sum of the weights of the components in x: f(x) =P
c2x
w(c). Finally, letC �x denote the subset of components that do not contribute to the evaluationof solution x. Note that the sum of the weights of the components in C � x iscomputed by
Pc2C
w(c)�f(x). In the context of the component model, Grover’swave equation can be expressed as:
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
c2C
w(c)� f(x)
!,
where p1 = ↵/d is the (sampling) rate at which components that contribute tof(x) are removed from solution x to create a neighboring solution y 2 N(x),and p2 = �/d is the rate at which components in the set C � x are sampled tocreate a neighboring solution y 2 N(x). By simple algebra,
Avg(f(y))y2N(x)
= f(x)� p1f(x) + p2
X
w2C
w(c)� f(x)
!= f(x) +
�
d
(f̄ � f(x)),
where � = ↵+ �, and f̄ = �/(↵+ �)P
c2C
w(c) [16].
4.2 Proof of Elementariness
Let us start presenting two lemmas.
Lemma 1. Given the n! possible Hamiltonian Paths over n vertices, all edgesappear the same number of times in the n! solutions and this number is 2(n�1)!.
Proof. Each edge (u, v) of the graph can be placed in positions 1, 2, . . . , n � 1of the permutation. This means a total of n � 1 positions where (u, v) can beplaced. For each position it can appear as u followed by v or v followed by u.
↵
d
�
d
1
↵
d
�
d
1
↵
d
�
d
f̄ =�
↵+ �
X
c2C
w(c)
1
Does not change with the neighborhood
IN OUT
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Component Model Elementariness

15 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Elementariness of HPO with reversals: IN • How many times is a component IN the solution removed in the neighborhood?
α = n-2
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Component Model Elementariness

16 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Elementariness of HPO with reversals: IN • How many times is a component OUT of the solution included in the neighborhood?
• HPO with reversals is elementary and the wave equation is:
β = 2
and all feasible locations j < i. When all possible values of j are considered,this causes all of the vertices in the permutation left of vertex v
i
to come into aposition adjacent to v
i
except for vi�1 which is already adjacent. Next consider a
cut at location i+1 (i is still fixed) and all feasible locations m > i+1. When allof the possible of value of m are considered all of the vertices in the permutationto the right of vertex v
i
are moved into a position adjacent to v
i
except v
i+1.Thus, in these cases v
i
does not move, but every edge not in the solution x
that is incident on vertex i is sampled once. Since this is true for all vertices, itfollows that every edge not in the current solution is sampled twice (� = 2): oncefor each of the vertices in which it is incident. Therefore, summing over all theneighbors: d ·Avg(f(y))
y2N(x) = d · f(x)� (n� 2)f(x)+ 2�P
c2C
w(c)� f(x)�.
Computing the average over the neighborhood and taking into account theresult of Lemma 2:
Avg(f(y))y2N(x)
= f(x)� n� 2
n(n� 1)/2� 1f(x) +
2
n(n� 1)/2� 1
X
c2C
w(c)� f(x)
!
= f(x) +n
n(n� 1)/2� 1(f̄ � f(x)).
ut
5 Landscape Structure for Swaps
Given a permutation ⇡, we can build a new permutation ⇡
0 by swapping twopositions i and j in the permutation. The new permutation is defined as:
⇡
0(k) =
8<
:
⇡(k) if k 6= i and k 6= j,⇡(i) if k = j,⇡(j) if k = i.
(5)
Figure 1(b) illustrates the concept of swap. The swap neighborhood N
S
(⇡) ofa permutation ⇡ contains all the permutations that can be formed by applyingswaps to ⇡. Each swap can be identified by the pair (i, j) of positions to swap. Thecardinality of the swap neighborhood is |N
S
(⇡)| = n(n� 1)/2. Unless otherwisestated, we will refer always to the swap neighborhood in this section.
We will analyze the landscape composed of the set of permutations of n
elements, the swap neighborhood and the objective function (2). The approachused for this analysis will be di↵erent than the one in the previous section.Instead of using the component model we will base our results in the analysis ofthe QAP landscape done in [6]. The reasons for not using the component modelwill be discussed at the end of the section.
5.1 Previous Results for QAP
According to Chicano et al. [6], the ELD of the QAP for the swap neighborhoodis composed of three components. The objective function analyzed in [6] is moregeneral than (3), it corresponds to the Lawler version of QAP [9]:
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Component Model Elementariness

17 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Quadratic Assignment Problem: Definition Previously on QAP Decomposition of HPO
rij
• A QAP instance is composed of n facilities and n locations
• A distance rij is specified between each pair of locations
• A flow wpq is specified between each pair of facilities
• The problem consists in assigning the facilities to the locations minimizing cost
wpq
Facilities Locations
generalization
Kronecker’s delta
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work

18 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
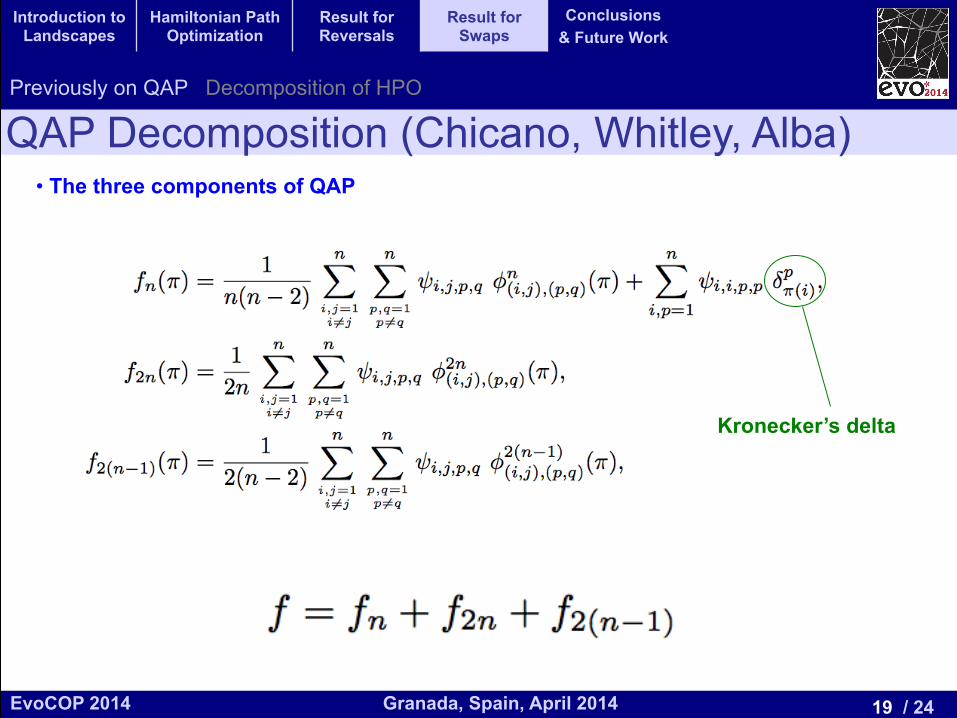
QAP Decomposition (Chicano, Whitley, Alba) • Auxiliary ϕ functions
• Three elementary components for the swap neighborhood
p … q
i j π
q … p
Eigenvalues
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Previously on QAP Decomposition of HPO
19 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• The three components of QAP
Kronecker’s delta
QAP Decomposition (Chicano, Whitley, Alba)
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Previously on QAP Decomposition of HPO
20 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
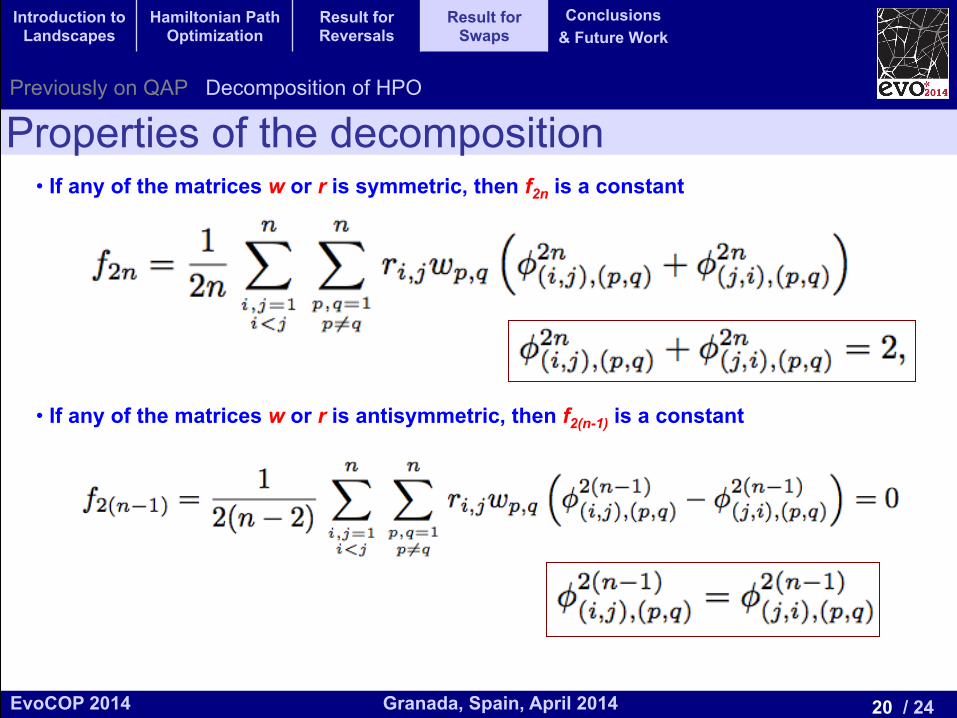
• If any of the matrices w or r is symmetric, then f2n is a constant
• If any of the matrices w or r is antisymmetric, then f2(n-1) is a constant
Properties of the decomposition
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Previously on QAP Decomposition of HPO

21 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• TSP is a particular case of QAP with two elementary components: f2n and f2(n-1)
• HPO is another subproblem of QAP
Subproblems of QAP: TSP and HPO
↵
d
�
d
f̄ =�
↵+ �
X
c2C
w(c)
f(⇡) =n�1X
i=1
w⇡(i),⇡(i+1) + w⇡(n),⇡(1)
1
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Previously on QAP Decomposition of HPO

22 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• If distance matrix in HPO is symmetric then f2n is a constant and the landscape has two elementary components:
Subproblems of QAP: TSP and HPO
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work
Previously on QAP Decomposition of HPO
23 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
• HPO with the reduced reversals neighborhood is an elementary landscape
• HPO with the swap neighborhood is the sum of two elementary landscapes
• The analysis of the problem can be used to compute statistics that could help in the search
• Spectral theory of quasi-Abelian Cayley graph cannot be easily applied to the reversals
Conclusions
Future Work
• Analysis of partial neighborhoods
• Search for additional applications of the elementary landscape decomposition
• How do the elementary components of HPO relate to the equivalent TSP problem?
Conclusions & Future Work
Introduction to Landscapes
Hamiltonian Path Optimization
Result for Reversals
Result for Swaps
Conclusions & Future Work

24 / 24 Granada, Spain, April 2014 EvoCOP 2014
UNIVERSITY*OF*GRANADA*23225*APRIL*2014
CONFERENCE'HANDBOOK
Thanks for your attention !!!
Elementary Landscape Decomposition of the Hamiltonian Path Optimization Problem