elektrotehniČki fakultet...
TRANSCRIPT
ELEKTROTEHNIČKI FAKULTET SARAJEVO POSTDIPLOMSKI MAGISTARSKI STUDIJ ODSJEK ZA AUTOMATIKU I ELEKTRONIKU PREDMET: Metode i tehnike identifikacije sistema Nastavnik: Red. Prof. Dr. Adnan Salihbegović
SEMINARSKI RAD:
A. Identifikacija objekta robotske ruke na osnovu eksperimentalno
dobivenih testnih podataka, korištenjem IDENT alata u okviru MATLAB softverskog paketa
B. Analiza modela čoperski upravljanog DC motora upotrebom Simulink alata u okviru MATLAB softverskog paketa
Datum: Student: Sarajevo, 11.10.2005. Ibrahimkadić Suad, dipl.el.ing.
SADRŽAJ
A. IDENTIFIKACIJA....................................................................... 1
1. Zadatak ............................................................................... 1 2. Uvod ................................................................................... 2 2.1. Prikaz promjene ulaza i izlaza u vremenu .................... 3 2.2. Prikaz frekventnog spektra ulazne i izlazne veličine.... 3 3. Neparametarska identifikacija ............................................. 5 4. Parametarska identifikacija ................................................. 8
B. MODELIRANJE ........................................................................ 15
1. Zadatak ............................................................................... 15 2. Opis DC mašine .................................................................. 16 3. Model DC mašine ............................................................... 17 4. Čoperski upravljani DC motor ............................................. 19 4.1. Gto (Gate Turn Off) tiristor .......................................... 19 4.2. Regulator brzine .......................................................... 20 4.3. Regulator struje armature ............................................ 20 5. Rezultati simulacije ............................................................. 21 5.1. Korišteni model ............................................................ 21 5.2. Dostizanje stacionarnog stanja po uključenju .............. 24 5.3. Analiza reakcije sistema na smetnje ............................. 26 5.4. Analiza podešenja parametara PI regulatora................ 28 LITERATURA ................................................................................. 33
Metode i tehnike identifikacije sistema
A. IDENTIFIKACIJA 1. ZADATAK: Koristeći IDENT Toolkit u okviru MATLAB software-skog paketa provesti neparametarsku i parametarsku identifikaciju sistema i analizu dobijenih modela za dati set eksperimentalno snimljenih ulazno-izlaznih podataka u file-u: robot_arm.dat snimljenih na objektu: robotske ruke čiji je opis dat u tekst file-u : robot_arm.txt
1
Metode i tehnike identifikacije sistema
2. UVOD Korišteni podaci su dobijeni sa fleksibilne robotske ruke koja je instalirana na električnom motoru. Modelira se prijenosna funkcija sa mjerenog obrtnog momenta strukture na zemlji na ubrzanje fleksibilne ruke. Za dobijanje ispitnih podataka primijenjen je periodični sinusoidalni ulaz.
2
Sistem
Reaction torque of the structure
Acceleration of the arm
Slika A.2.1: Opis problema Prije pristupa samom procesu identifikacije bilo je potrebno dobijene ispitne podatke prvo importovati u GUI. Datoteka «robot_arm.dat» je kopirana u direktorij Work MATLAB-a, nakon čega je primijenjena slijedeća komanda u radnom prostoru MATLAB-a:
load robot_arm.dat čime se kreirala varijabla robot_arm tipa double array u radnom prostoru MATLAB-a. Ova varijabla je sadržavala snimljene ulazno - izlazne podatke u obliku matrice1024x2. Nakon ovoga su od ove varijable kreirane 2 nove varijable tipa double array, koje su sadržavale podatke za ulaz odnosno izlaz, a označene su sa u odnosno y, respektivno:
u = robot_arm (:, 1)
y = robot_arm (:, 2) Tada je iz ident toolbox-a odabrana komanda Import iz pop-up menija Data i, nakon podešavanja traženih vrijednosti u dijaloškom okviru, dobijen je set podataka u GUI pod nazivom «Robot».
Metode i tehnike identifikacije sistema
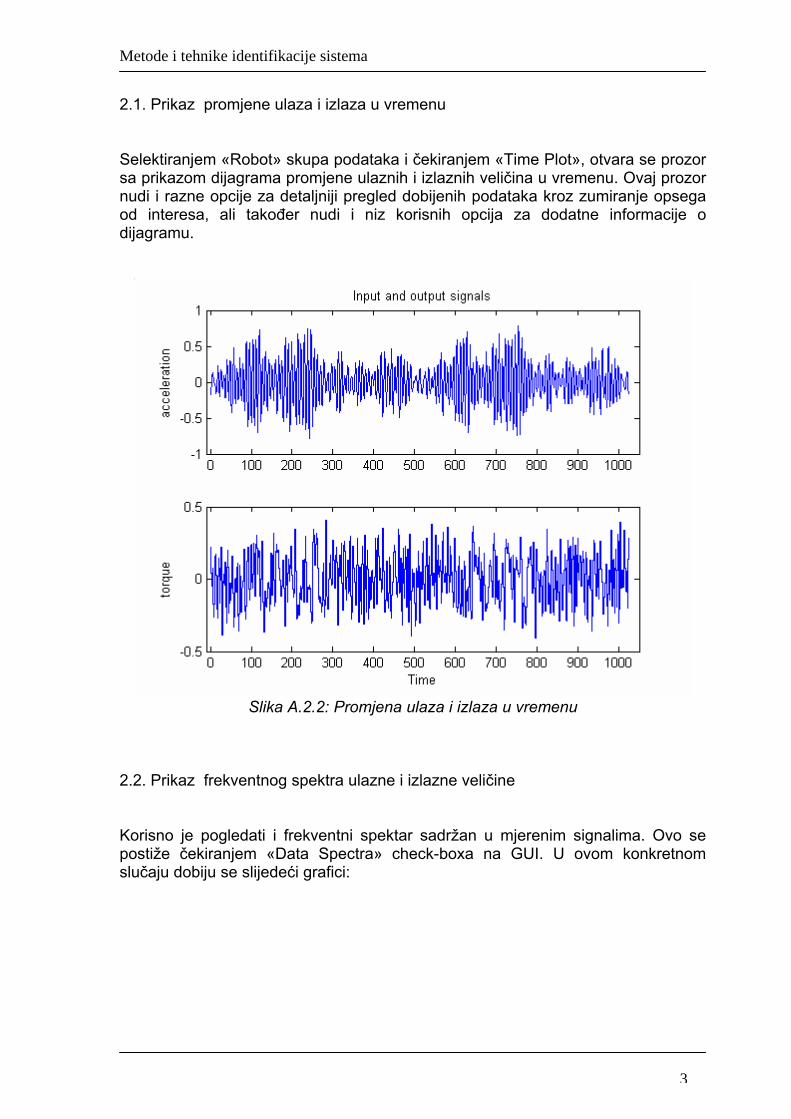
2.1. Prikaz promjene ulaza i izlaza u vremenu Selektiranjem «Robot» skupa podataka i čekiranjem «Time Plot», otvara se prozor sa prikazom dijagrama promjene ulaznih i izlaznih veličina u vremenu. Ovaj prozor nudi i razne opcije za detaljniji pregled dobijenih podataka kroz zumiranje opsega od interesa, ali također nudi i niz korisnih opcija za dodatne informacije o dijagramu.
Slika A.2.2: Promjena ulaza i izlaza u vremenu
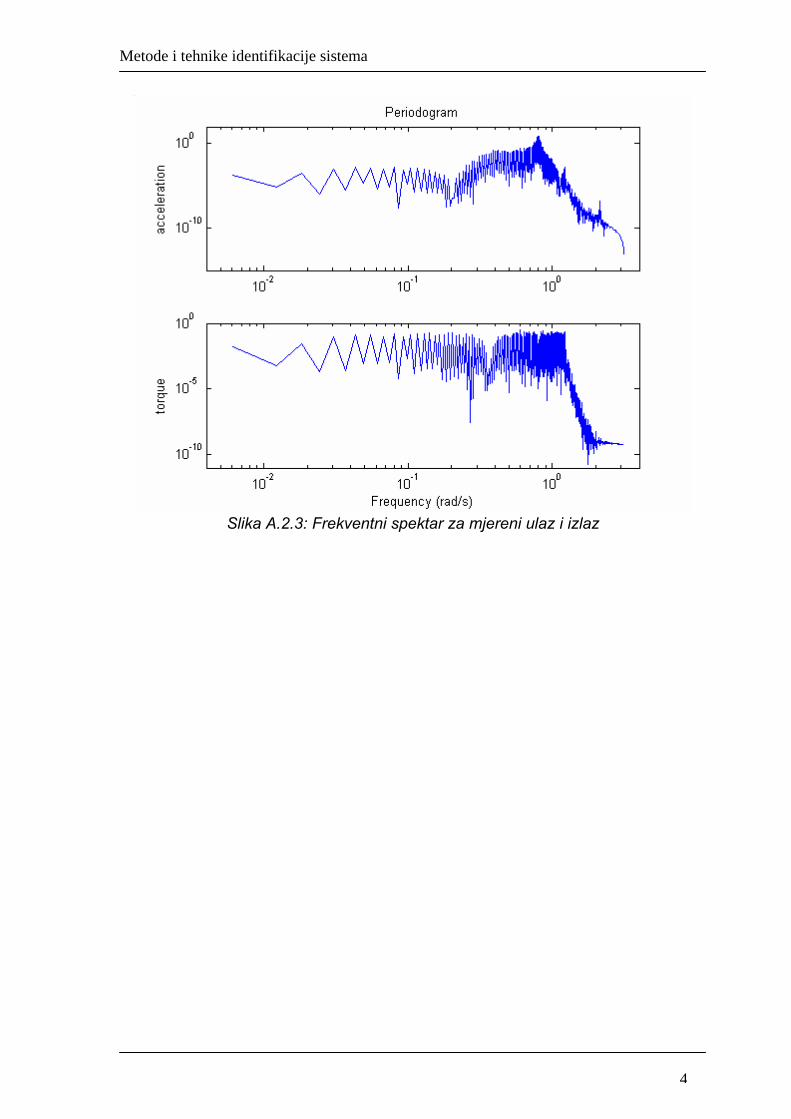
2.2. Prikaz frekventnog spektra ulazne i izlazne veličine Korisno je pogledati i frekventni spektar sadržan u mjerenim signalima. Ovo se postiže čekiranjem «Data Spectra» check-boxa na GUI. U ovom konkretnom slučaju dobiju se slijedeći grafici:
3
Metode i tehnike identifikacije sistema
Slika A.2.3: Frekventni spektar za mjereni ulaz i izlaz
4
Metode i tehnike identifikacije sistema
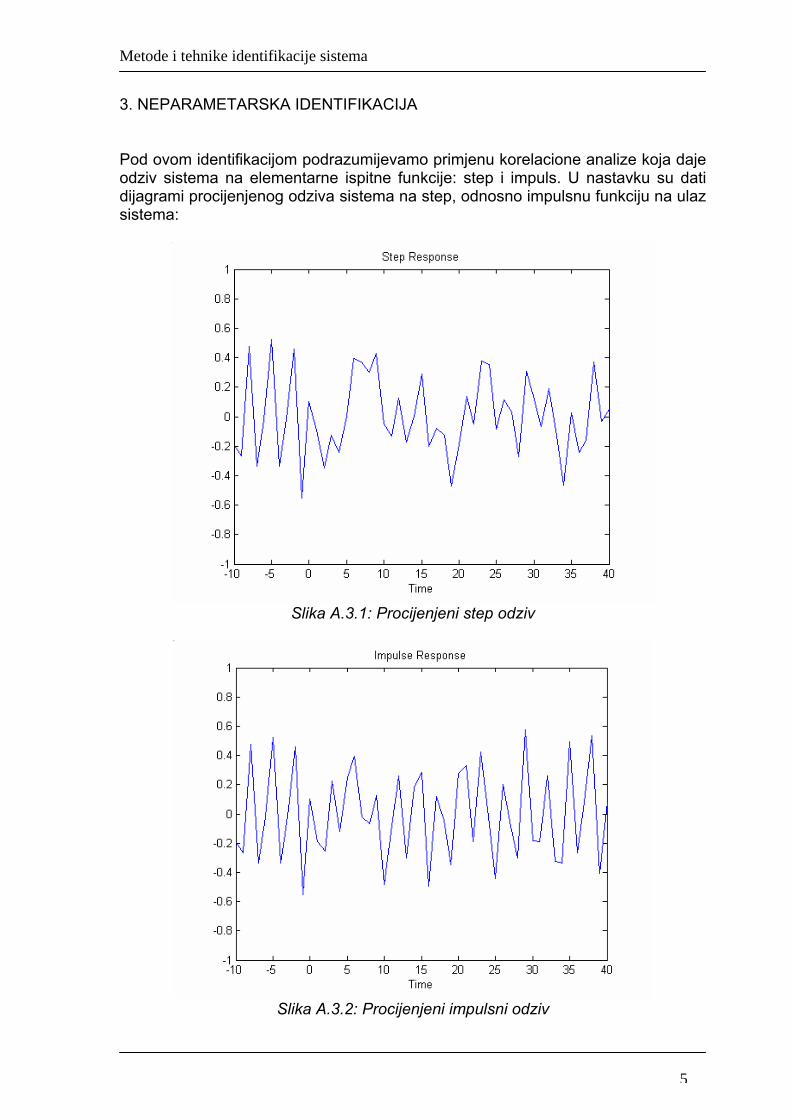
3. NEPARAMETARSKA IDENTIFIKACIJA Pod ovom identifikacijom podrazumijevamo primjenu korelacione analize koja daje odziv sistema na elementarne ispitne funkcije: step i impuls. U nastavku su dati dijagrami procijenjenog odziva sistema na step, odnosno impulsnu funkciju na ulaz sistema:
Slika A.3.1: Procijenjeni step odziv
Slika A.3.2: Procijenjeni impulsni odziv
5
Metode i tehnike identifikacije sistema
Prikazani grafici su dobijeni primjenom Quick Start procedure, a rezultujući model je po defaultu nazvan "imp". Ukoliko se selektira ovaj model i čekira box pored opcije "Transient Response" korisniku se otvara prozor sa prikazom grafika koji odgovara impulsnom odzivu. Korisniku je na raspolaganju niz opcija u ovom prozoru, a jedna od njih je i mogućnost prikaza step odziva, prostim selektiranjem ove opcije. Model koji se dobije na ovakav način (quick start procedurom) odgovara slijedećoj instrukciji u radnom prostoru MATLAB-a:
imp = impulse(Robotde, [-5,40], [ ]) Prvi argument predstavlja naziv skupa podataka koji se koristi za proračunavanje impulsnog odziva. Drugi parametar predstavlja vrijeme za koje se proračunavanje vrši, a zadnji argument predstavlja red filtera za izbjeljivanje (ukoliko se ne unese vrijednost ovog reda u uglaste zagrade, podrazumijeva se vrijednost 10). Ocjena valjanosti procijenjenog impulsnog odziva se može dobiti primjenom slijedeće komande u radnom prostoru MATLAB-a:
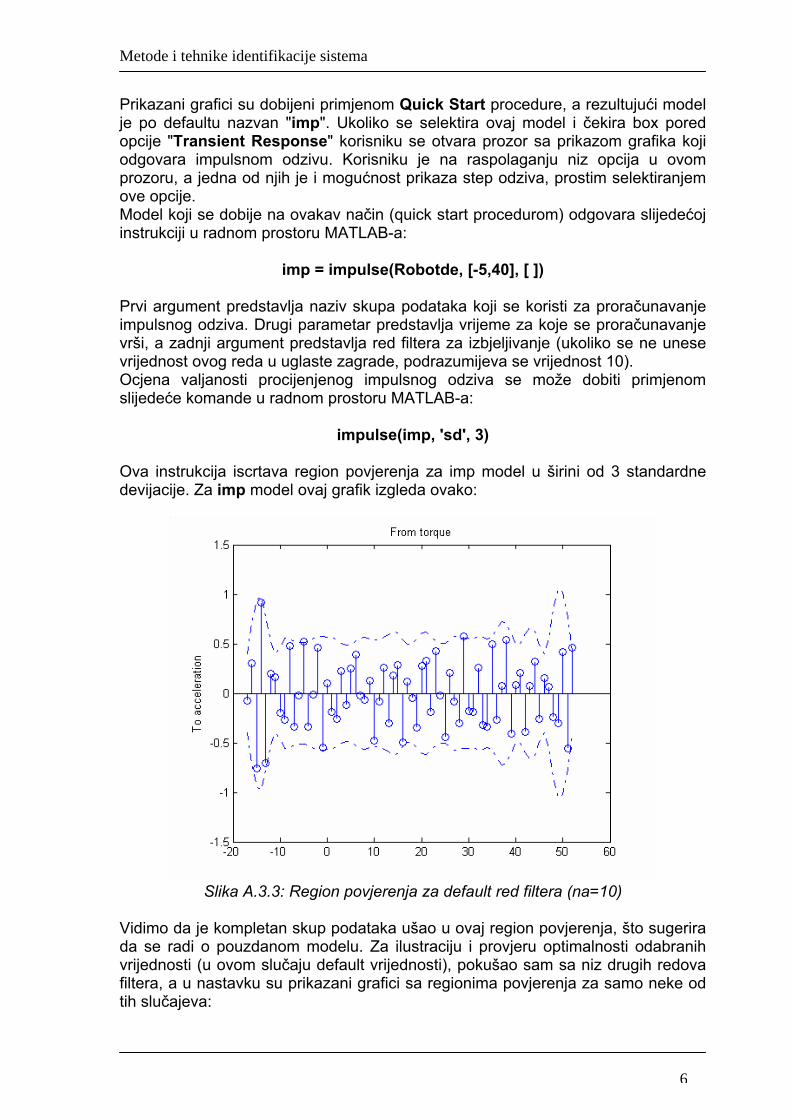
impulse(imp, 'sd', 3) Ova instrukcija iscrtava region povjerenja za imp model u širini od 3 standardne devijacije. Za imp model ovaj grafik izgleda ovako:
Slika A.3.3: Region povjerenja za default red filtera (na=10)
Vidimo da je kompletan skup podataka ušao u ovaj region povjerenja, što sugerira da se radi o pouzdanom modelu. Za ilustraciju i provjeru optimalnosti odabranih vrijednosti (u ovom slučaju default vrijednosti), pokušao sam sa niz drugih redova filtera, a u nastavku su prikazani grafici sa regionima povjerenja za samo neke od tih slučajeva:
6

Metode i tehnike identifikacije sistema
Slika A.3.4: Region povjerenja za red filtera na=5
Slika A.3.5: Region povjerenja za red filtera na=20
U svim slučajevima je dio podataka izlazio iz regiona povjerenja, tako da sam u konačnici prihvatio default vrijednosti za pomenute parametre.
7
Metode i tehnike identifikacije sistema
4. PARAMETARSKA IDENTIFIKACIJA Zahvaljujući bogatoj ponudi ident paketa u smislu funkcija koje se mogu primijeniti u svrhu identificiranja sistema, zgodno je bilo prije detaljnijeg pristupa primijeniti opciju Quick Start iz pop-up menija Preprocess, koja kao rezultat daje nova tri skupa podataka:
• Robotd – ovaj set predstavlja detrendirani set podataka, odnosno skup Robot, kod kojeg su uklonjene srednje vrijednosti iz podataka dobijenih mjerenjem,
• Robotde – ovaj set po default-u uzima prvu polovicu podataka iz detrendiranog skupa i proglašava ih podacima za estimaciju, odnosno podacima koji će se koristiti u procjenjivanju modela,
• Robotdv - ovaj skup predstavlja preostalu polovicu podataka iz detrendiranog skupa, a koristi se za validaciju (ocjenu podudaranja) procijenjenog modela.
Pored toga, «Robotde» skup podataka se stavlja na lokaciju radnih podataka (Working Data), a «Robotdv» se postavlja na lokaciju validacionih podataka (Validation Data). Na ovaj način smo vrlo brzo napravili sve pripreme za početak parametarske identifikacije. Sve ove operacije je, naravno, moguće uraditi i pojedinačno, korištenjem komandi iz pop-up menija Preprocess, uz proizvoljan izbor veličine seta podataka za estimaciju, odnosno validaciju. Međutim, kao što je već navedeno, zbog jednostavnosti i, kako će se kasnije pokazati, uspješnosti procedure Quick Start, odlučio sam se u ovom konkretnom slučaju zadržati na toj proceduri, bez detaljnog izlaganja mogućnosti ident alata koje se, na koncu, mogu naći i u opsežnom help-u koji je dostupan izborom kroz meni. U okviru parametarske identifikacije korisniku je na raspolaganju nekoliko vrsta modela, uz mogućnost podešavanja njihovih parametara. Da bi se proces identifikacije maksimalno pojednostavio i ubrzao, korisniku je ponovo na raspolaganju Quick Start opcija, sada u pop-up meniju Estimate. Primjena ove opcije je dosta korisna, jer i za slučaj da ne dobijemo najbolji rezultat, pruža nam dobar prijedlog o tome u kojem smijeru treba da se krećemo, a također daje dobru osnovu modela koju je dalje potrebno poboljšavati. Primjenom ove opcije, dobijeni su slijedeći modeli:
8
Metode i tehnike identifikacije sistema
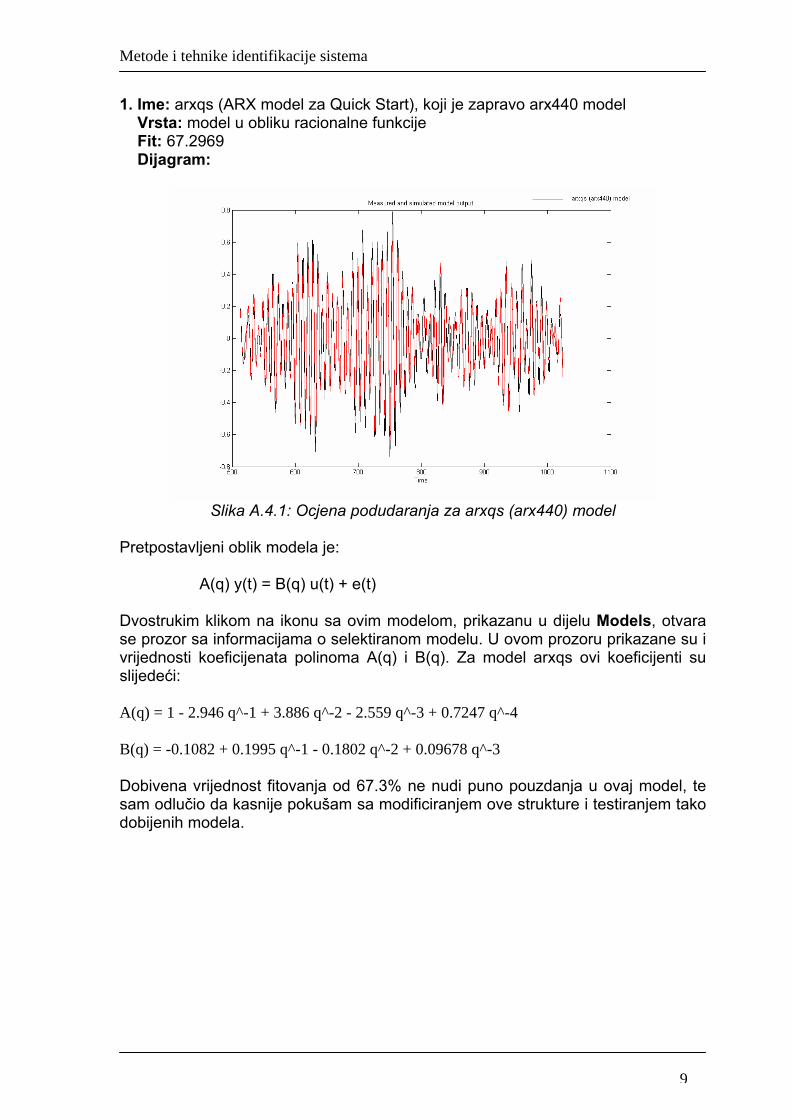
1. Ime: arxqs (ARX model za Quick Start), koji je zapravo arx440 model Vrsta: model u obliku racionalne funkcije Fit: 67.2969 Dijagram:
Slika A.4.1: Ocjena podudaranja za arxqs (arx440) model
Pretpostavljeni oblik modela je:
A(q) y(t) = B(q) u(t) + e(t)
Dvostrukim klikom na ikonu sa ovim modelom, prikazanu u dijelu Models, otvara se prozor sa informacijama o selektiranom modelu. U ovom prozoru prikazane su i vrijednosti koeficijenata polinoma A(q) i B(q). Za model arxqs ovi koeficijenti su slijedeći: A(q) = 1 - 2.946 q^-1 + 3.886 q^-2 - 2.559 q^-3 + 0.7247 q^-4 B(q) = -0.1082 + 0.1995 q^-1 - 0.1802 q^-2 + 0.09678 q^-3 Dobivena vrijednost fitovanja od 67.3% ne nudi puno pouzdanja u ovaj model, te sam odlučio da kasnije pokušam sa modificiranjem ove strukture i testiranjem tako dobijenih modela.
9
Metode i tehnike identifikacije sistema
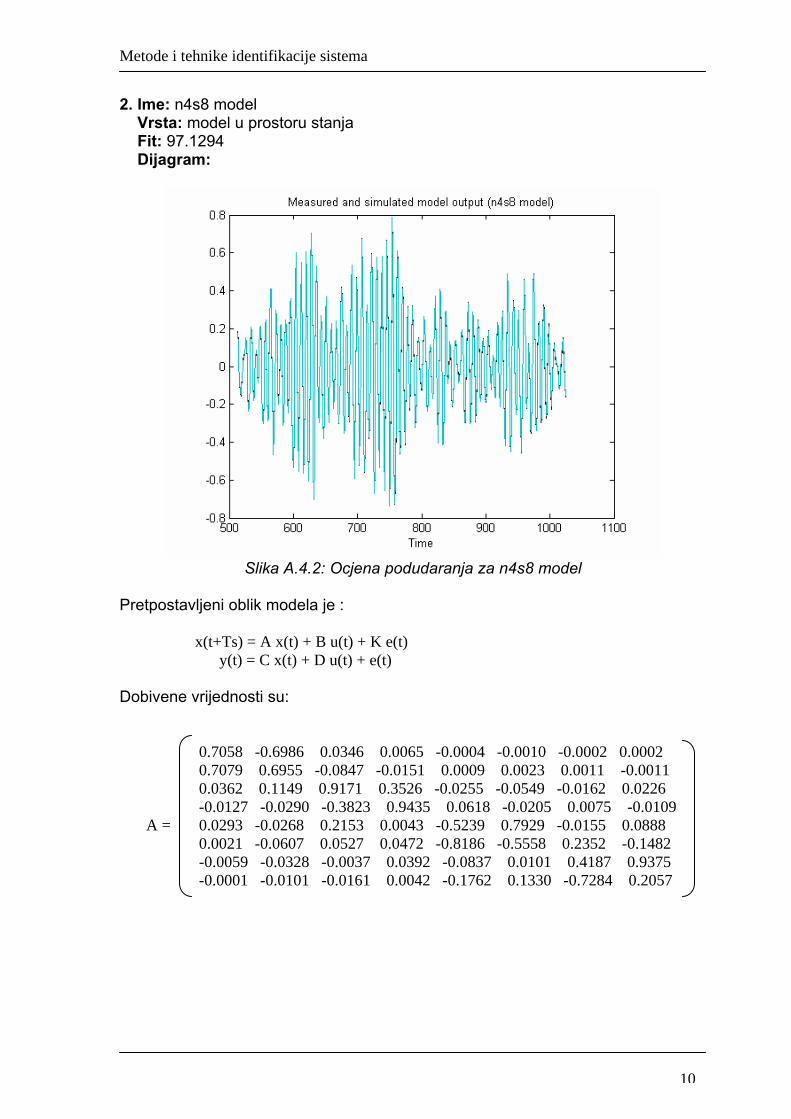
2. Ime: n4s8 model Vrsta: model u prostoru stanja Fit: 97.1294 Dijagram:
Slika A.4.2: Ocjena podudaranja za n4s8 model
Pretpostavljeni oblik modela je : x(t+Ts) = A x(t) + B u(t) + K e(t) y(t) = C x(t) + D u(t) + e(t) Dobivene vrijednosti su: 0.7058 -0.6986 0.0346 0.0065 -0.0004 -0.0010 -0.0002 0.0002 0.7079 0.6955 -0.0847 -0.0151 0.0009 0.0023 0.0011 -0.0011 0.0362 0.1149 0.9171 0.3526 -0.0255 -0.0549 -0.0162 0.0226
-0.0127 -0.0290 -0.3823 0.9435 0.0618 -0.0205 0.0075 -0.0109 A = 0.0293 -0.0268 0.2153 0.0043 -0.5239 0.7929 -0.0155 0.0888 0.0021 -0.0607 0.0527 0.0472 -0.8186 -0.5558 0.2352 -0.1482
-0.0059 -0.0328 -0.0037 0.0392 -0.0837 0.0101 0.4187 0.9375 -0.0001 -0.0101 -0.0161 0.0042 -0.1762 0.1330 -0.7284 0.2057
10
Metode i tehnike identifikacije sistema
-0.1553 0.5154 33.2178 13.3839 B = -292.8614
902.6638 -26.2645 -69.3296
11
C = 5.4021 -2.2100 0.1112 0.0208 -0.0012 -0.0032 -0.0011 0.0012 D = 0
0.2305 -0.1233 -2.4326
K = 1.7012 -57.7195
-81.4384 25.5201 -28.2700
Odmah se uočava da je model u prostoru stanja, čiji je red nk = 8, pružio dosta dobre rezultate, sa vrlo velikim stepenom fitovanja sa izmjerenim vrijednostima smještenim u validacioni set podataka. Čekiranjem «Model Resids» dobijamo prikaz autokorelacione funkcije rezidua i kroskorelacione funkcije rezidua i ulaznog signala. Rezultati su prikazani na slijedećim dijagramima:
Metode i tehnike identifikacije sistema
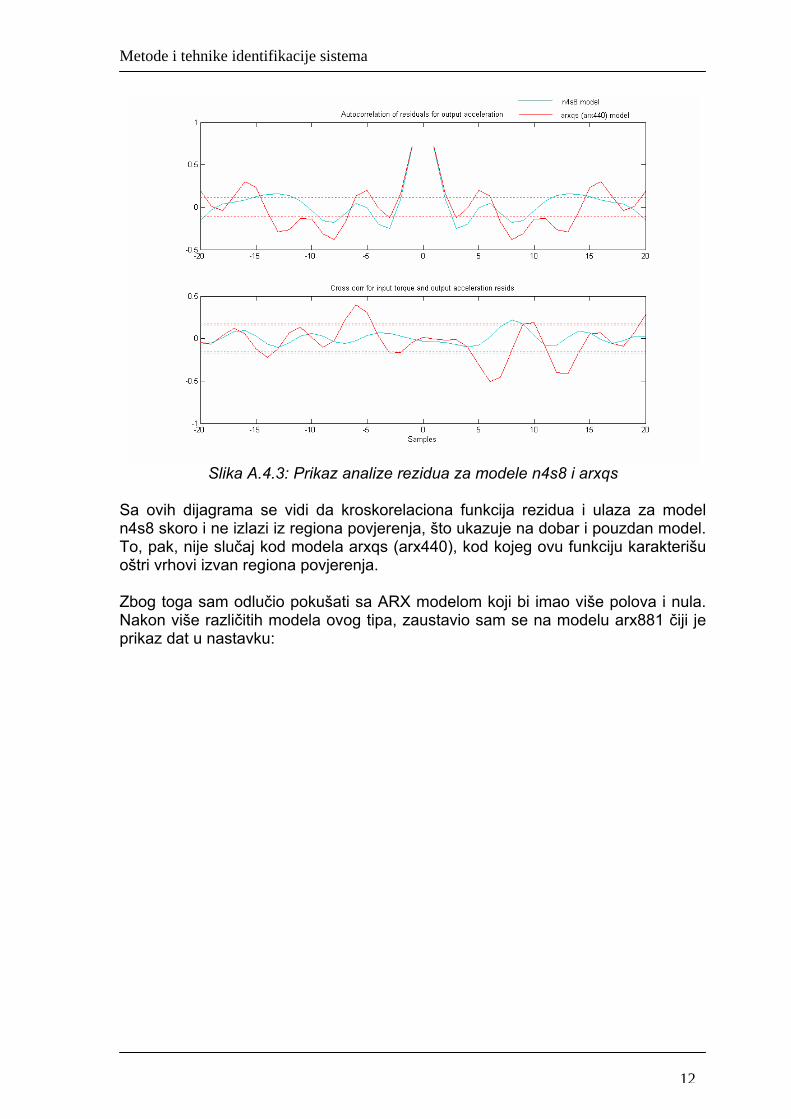
Slika A.4.3: Prikaz analize rezidua za modele n4s8 i arxqs
Sa ovih dijagrama se vidi da kroskorelaciona funkcija rezidua i ulaza za model n4s8 skoro i ne izlazi iz regiona povjerenja, što ukazuje na dobar i pouzdan model. To, pak, nije slučaj kod modela arxqs (arx440), kod kojeg ovu funkciju karakterišu oštri vrhovi izvan regiona povjerenja. Zbog toga sam odlučio pokušati sa ARX modelom koji bi imao više polova i nula. Nakon više različitih modela ovog tipa, zaustavio sam se na modelu arx881 čiji je prikaz dat u nastavku:
12
Metode i tehnike identifikacije sistema
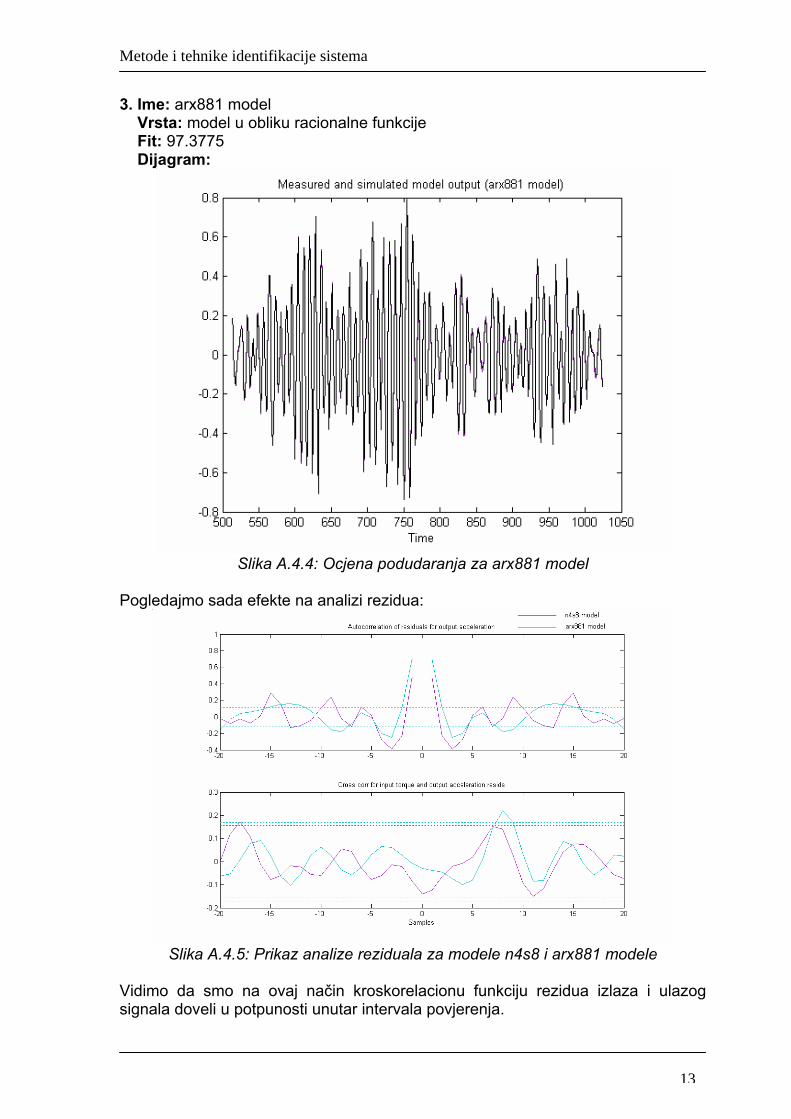
3. Ime: arx881 model Vrsta: model u obliku racionalne funkcije Fit: 97.3775 Dijagram:
Slika A.4.4: Ocjena podudaranja za arx881 model
Pogledajmo sada efekte na analizi rezidua:
Slika A.4.5: Prikaz analize reziduala za modele n4s8 i arx881 modele
Vidimo da smo na ovaj način kroskorelacionu funkciju rezidua izlaza i ulazog signala doveli u potpunosti unutar intervala povjerenja.
13
Metode i tehnike identifikacije sistema
Obzirom da se pokazuje da model arx881 daje najbolje rezultate, on je odabran kao konačni. Kako ovaj model pretpostavlja slijedeći oblik zapisa:
Ay = Bu + e, to je potrebno naći i vrijednosti elemenata matrica A i B. Da bi se to postiglo, model arx881 je izvezen u radni prostor MATLAB-a i na taj način kreirana varijabla arx881 tipa idpoly. Uradnom prostoru su pokrenute komande:
arx881.A
arx881.B, koje su kao rezultat dale vrijednosti elemenata matrica A i B: A = (1.0000 -3.2879 5.7030 -6.5935 6.1917 -5.3480 4.1746 -2.3669 0.7534) B = (0 -0.5082 1.8883 -3.6481 4.5114 -3.6454 1.8958 -0.5327 0.0143).
14
Metode i tehnike identifikacije sistema
B. MODELIRANJE 1. ZADATAK:
Koristeći matematski model i opis : čoperski upravljanog istosmjernog motora datog u MATLAB toolboksu Sim PowerSystems u primjeru Chopper-fed DC motor drive Analizirati dati Simulink model : psbdcdrive.mdl i provesti simulaciju sistema i interpretirati dobijene rezultate uzimajući različite vrijednosti parametara modela. Analizirati i interpretirati dinamičko ponašanje objekta simulacije Dodatna referentna literatura: Adnan Salihbegovic Modeliranje dinamičkih sistema , Svjetlost , Sarajevo 1985
15
Metode i tehnike identifikacije sistema
2. OPIS DC MAŠINE DC motor se u osnovi sastoji iz dva dijela: rotirajući dio, koji se u literaturi naziva još i armatura (engl. armature), te statičkog dijela kojeg čini statorski namotaj, a u eng. literaturi je poznat pod nazibom field. Da bi se lakše razumio rad DC motora, posmatrajmo jedan dijagram koji pokazuje magnetnu interakciju između rotirajuće armature i statorskog namotaja – field coils:
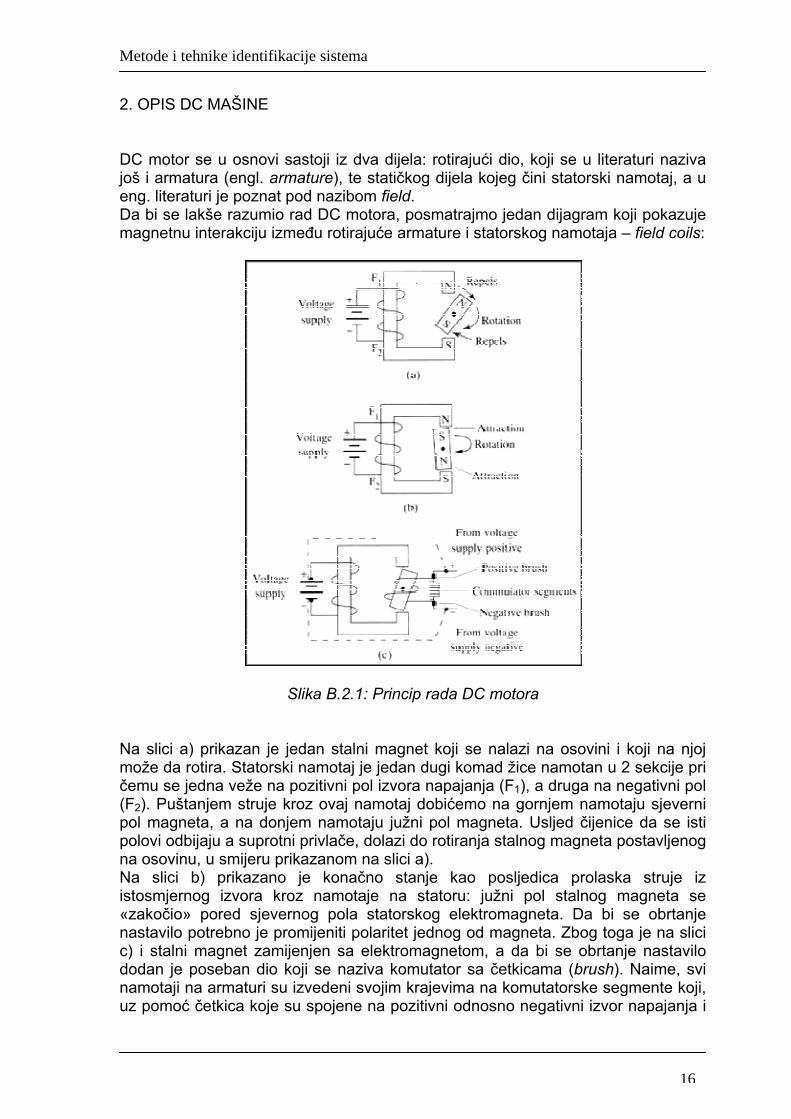
Slika B.2.1: Princip rada DC motora Na slici a) prikazan je jedan stalni magnet koji se nalazi na osovini i koji na njoj može da rotira. Statorski namotaj je jedan dugi komad žice namotan u 2 sekcije pri čemu se jedna veže na pozitivni pol izvora napajanja (F1), a druga na negativni pol (F2). Puštanjem struje kroz ovaj namotaj dobićemo na gornjem namotaju sjeverni pol magneta, a na donjem namotaju južni pol magneta. Usljed čijenice da se isti polovi odbijaju a suprotni privlače, dolazi do rotiranja stalnog magneta postavljenog na osovinu, u smijeru prikazanom na slici a). Na slici b) prikazano je konačno stanje kao posljedica prolaska struje iz istosmjernog izvora kroz namotaje na statoru: južni pol stalnog magneta se «zakočio» pored sjevernog pola statorskog elektromagneta. Da bi se obrtanje nastavilo potrebno je promijeniti polaritet jednog od magneta. Zbog toga je na slici c) i stalni magnet zamijenjen sa elektromagnetom, a da bi se obrtanje nastavilo dodan je poseban dio koji se naziva komutator sa četkicama (brush). Naime, svi namotaji na armaturi su izvedeni svojim krajevima na komutatorske segmente koji, uz pomoć četkica koje su spojene na pozitivni odnosno negativni izvor napajanja i
16
Metode i tehnike identifikacije sistema
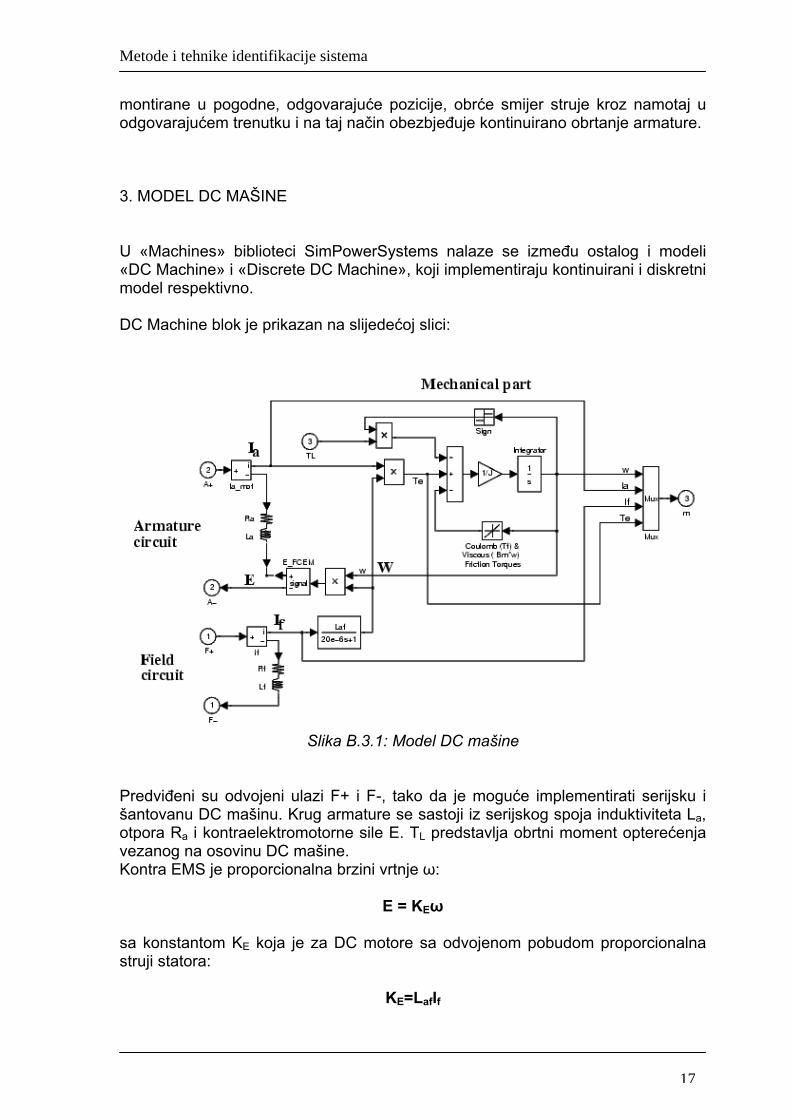
montirane u pogodne, odgovarajuće pozicije, obrće smijer struje kroz namotaj u odgovarajućem trenutku i na taj način obezbjeđuje kontinuirano obrtanje armature. 3. MODEL DC MAŠINE U «Machines» biblioteci SimPowerSystems nalaze se između ostalog i modeli «DC Machine» i «Discrete DC Machine», koji implementiraju kontinuirani i diskretni model respektivno. DC Machine blok je prikazan na slijedećoj slici:
Slika B.3.1: Model DC mašine
Predviđeni su odvojeni ulazi F+ i F-, tako da je moguće implementirati serijsku i šantovanu DC mašinu. Krug armature se sastoji iz serijskog spoja induktiviteta La, otpora Ra i kontraelektromotorne sile E. TL predstavlja obrtni moment opterećenja vezanog na osovinu DC mašine. Kontra EMS je proporcionalna brzini vrtnje ω:
E = KEω
sa konstantom KE koja je za DC motore sa odvojenom pobudom proporcionalna struji statora:
KE=LafIf
17
Metode i tehnike identifikacije sistema
Obrtni moment koji razvija DC motor je proporcionalan struji armature Ia:
Te=KTIa, pri čemu je KT=KE. Model DC mašine se može podijeliti na 2 dijela:
• Model električnog dijela, koji implementira gore navedene jednačine • Model mehaničkog dijela, koji implementira slijedeću jednačinu:
J dm/dt=Te-sgn(m)TL-BmM-Tf
gdje su: J – inercija Bm – koeficijent viskoznog trenja Tf – obrtni moment Coulombovog trenja Izlaz iz ovog modela je vektor m, koji sadrži 4 signala:
• M – ugaona brzina • Ia – struja armature • If – struja statora • Te – obrni moment motora
18
Metode i tehnike identifikacije sistema
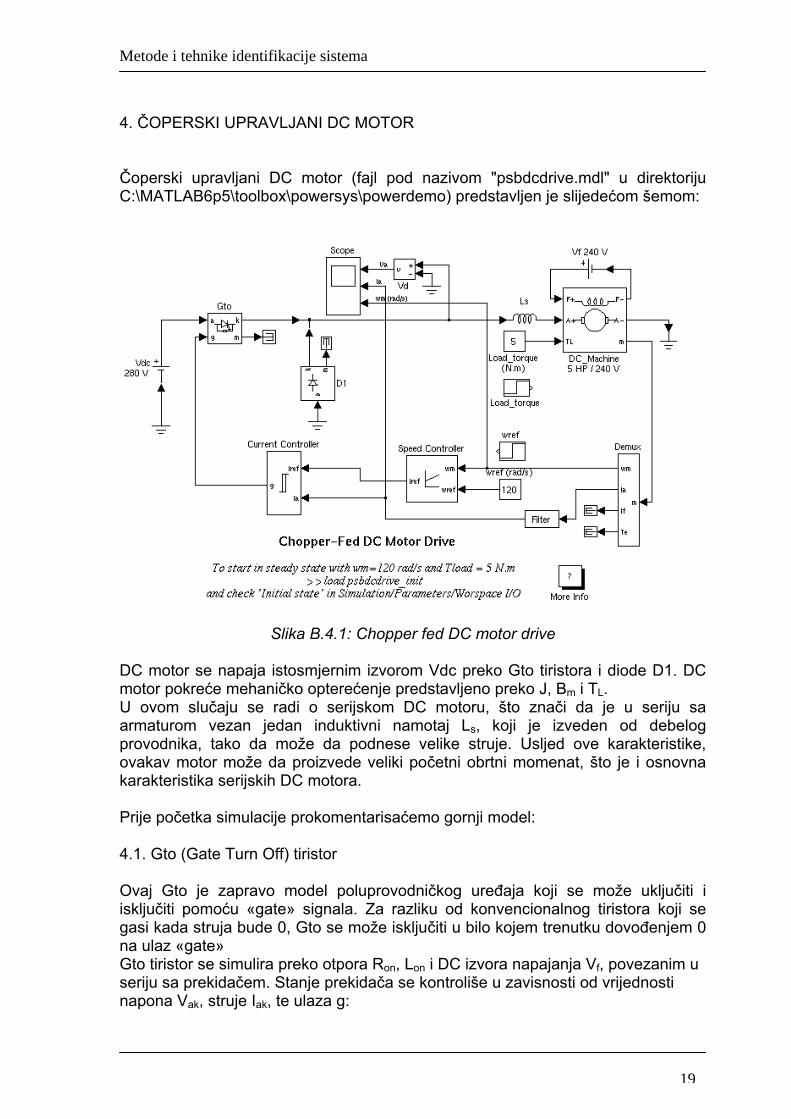
4. ČOPERSKI UPRAVLJANI DC MOTOR Čoperski upravljani DC motor (fajl pod nazivom "psbdcdrive.mdl" u direktoriju C:\MATLAB6p5\toolbox\powersys\powerdemo) predstavljen je slijedećom šemom:
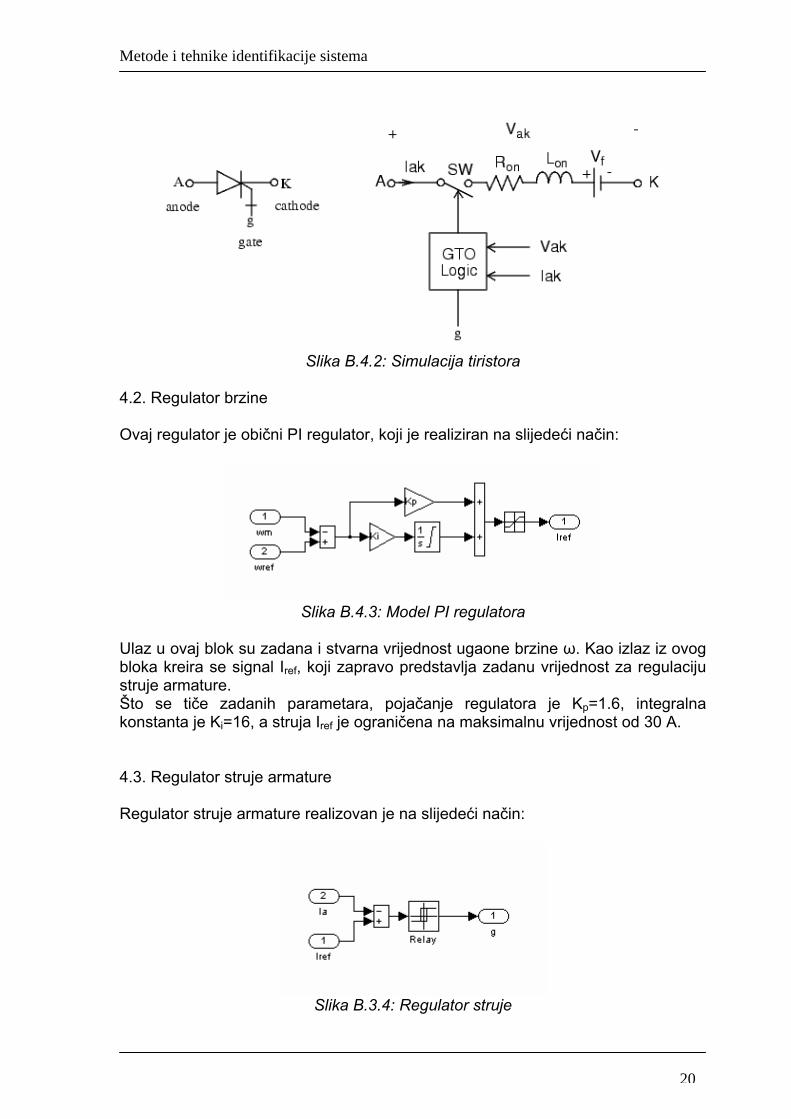
Slika B.4.1: Chopper fed DC motor drive DC motor se napaja istosmjernim izvorom Vdc preko Gto tiristora i diode D1. DC motor pokreće mehaničko opterećenje predstavljeno preko J, Bm i TL. U ovom slučaju se radi o serijskom DC motoru, što znači da je u seriju sa armaturom vezan jedan induktivni namotaj Ls, koji je izveden od debelog provodnika, tako da može da podnese velike struje. Usljed ove karakteristike, ovakav motor može da proizvede veliki početni obrtni momenat, što je i osnovna karakteristika serijskih DC motora. Prije početka simulacije prokomentarisaćemo gornji model: 4.1. Gto (Gate Turn Off) tiristor Ovaj Gto je zapravo model poluprovodničkog uređaja koji se može uključiti i isključiti pomoću «gate» signala. Za razliku od konvencionalnog tiristora koji se gasi kada struja bude 0, Gto se može isključiti u bilo kojem trenutku dovođenjem 0 na ulaz «gate» Gto tiristor se simulira preko otpora Ron, Lon i DC izvora napajanja Vf, povezanim u seriju sa prekidačem. Stanje prekidača se kontroliše u zavisnosti od vrijednosti napona Vak, struje Iak, te ulaza g:
19
Metode i tehnike identifikacije sistema
Slika B.4.2: Simulacija tiristora
4.2. Regulator brzine Ovaj regulator je obični PI regulator, koji je realiziran na slijedeći način:
Slika B.4.3: Model PI regulatora
Ulaz u ovaj blok su zadana i stvarna vrijednost ugaone brzine ω. Kao izlaz iz ovog bloka kreira se signal Iref, koji zapravo predstavlja zadanu vrijednost za regulaciju struje armature. Što se tiče zadanih parametara, pojačanje regulatora je Kp=1.6, integralna konstanta je Ki=16, a struja Iref je ograničena na maksimalnu vrijednost od 30 A. 4.3. Regulator struje armature Regulator struje armature realizovan je na slijedeći način:
Slika B.3.4: Regulator struje
20
Metode i tehnike identifikacije sistema
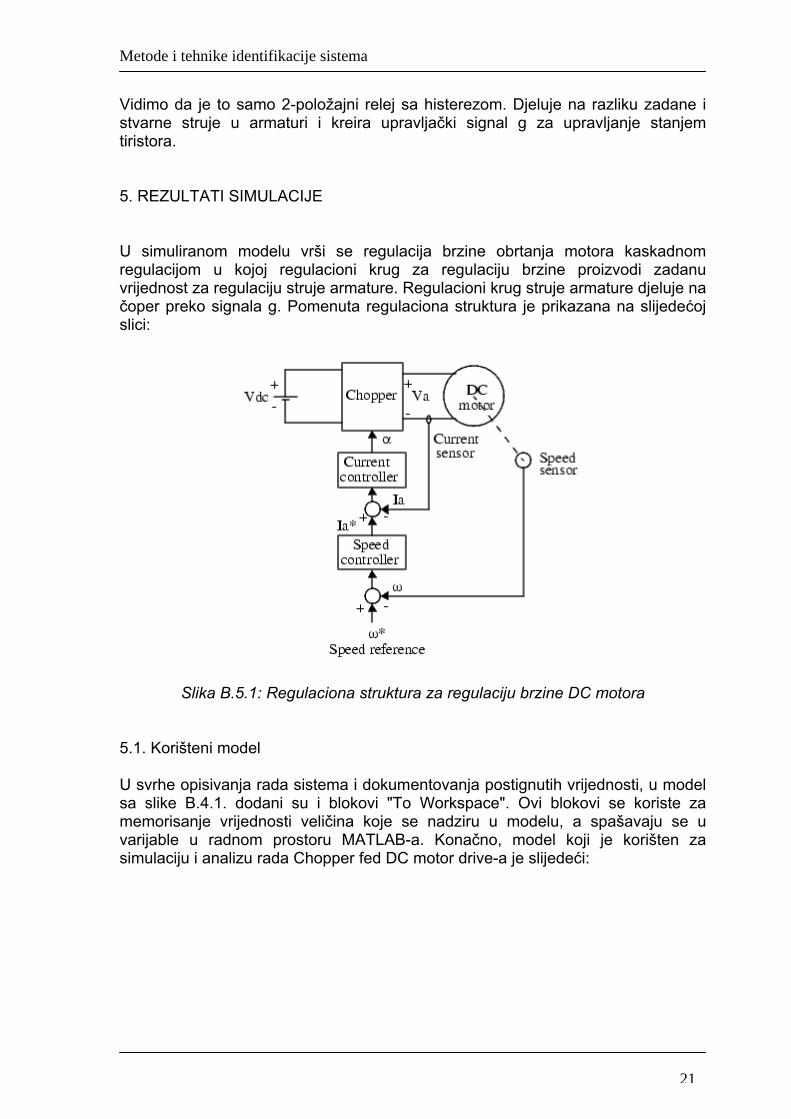
Vidimo da je to samo 2-položajni relej sa histerezom. Djeluje na razliku zadane i stvarne struje u armaturi i kreira upravljački signal g za upravljanje stanjem tiristora. 5. REZULTATI SIMULACIJE U simuliranom modelu vrši se regulacija brzine obrtanja motora kaskadnom regulacijom u kojoj regulacioni krug za regulaciju brzine proizvodi zadanu vrijednost za regulaciju struje armature. Regulacioni krug struje armature djeluje na čoper preko signala g. Pomenuta regulaciona struktura je prikazana na slijedećoj slici:
Slika B.5.1: Regulaciona struktura za regulaciju brzine DC motora 5.1. Korišteni model U svrhe opisivanja rada sistema i dokumentovanja postignutih vrijednosti, u model sa slike B.4.1. dodani su i blokovi "To Workspace". Ovi blokovi se koriste za memorisanje vrijednosti veličina koje se nadziru u modelu, a spašavaju se u varijable u radnom prostoru MATLAB-a. Konačno, model koji je korišten za simulaciju i analizu rada Chopper fed DC motor drive-a je slijedeći:
21
Metode i tehnike identifikacije sistema
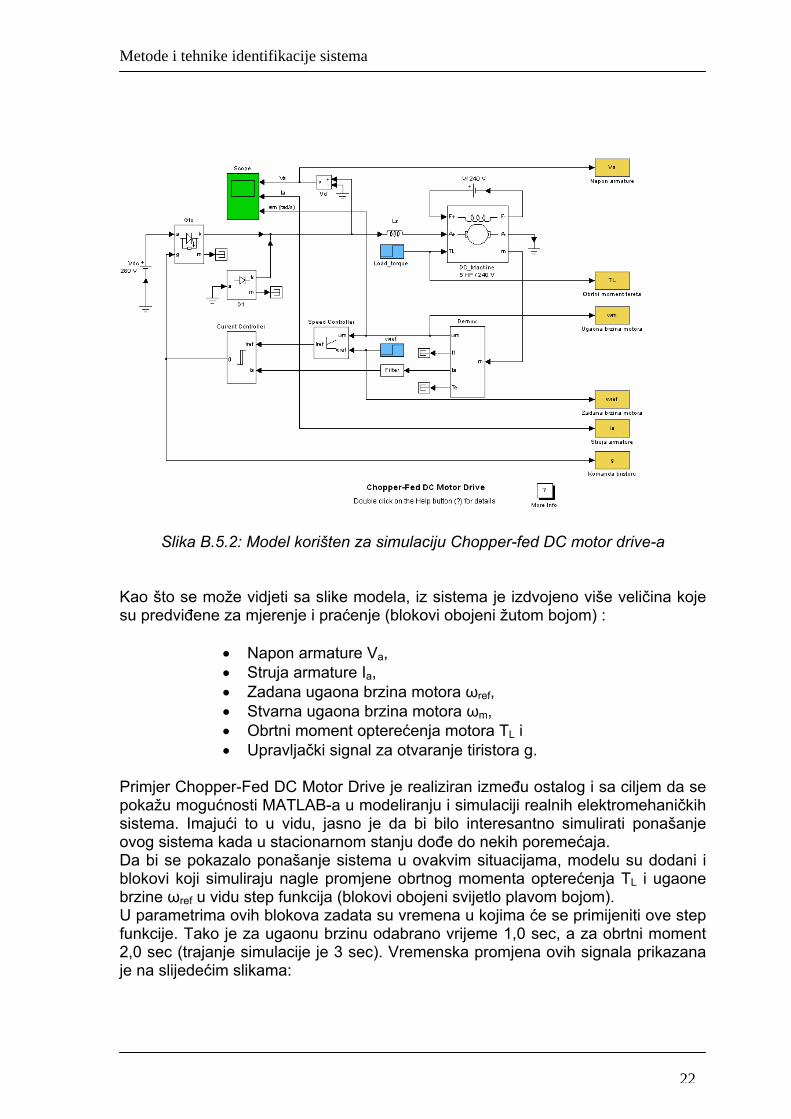
Slika B.5.2: Model korišten za simulaciju Chopper-fed DC motor drive-a Kao što se može vidjeti sa slike modela, iz sistema je izdvojeno više veličina koje su predviđene za mjerenje i praćenje (blokovi obojeni žutom bojom) :
• Napon armature Va, • Struja armature Ia, • Zadana ugaona brzina motora ωref, • Stvarna ugaona brzina motora ωm, • Obrtni moment opterećenja motora TL i • Upravljački signal za otvaranje tiristora g.
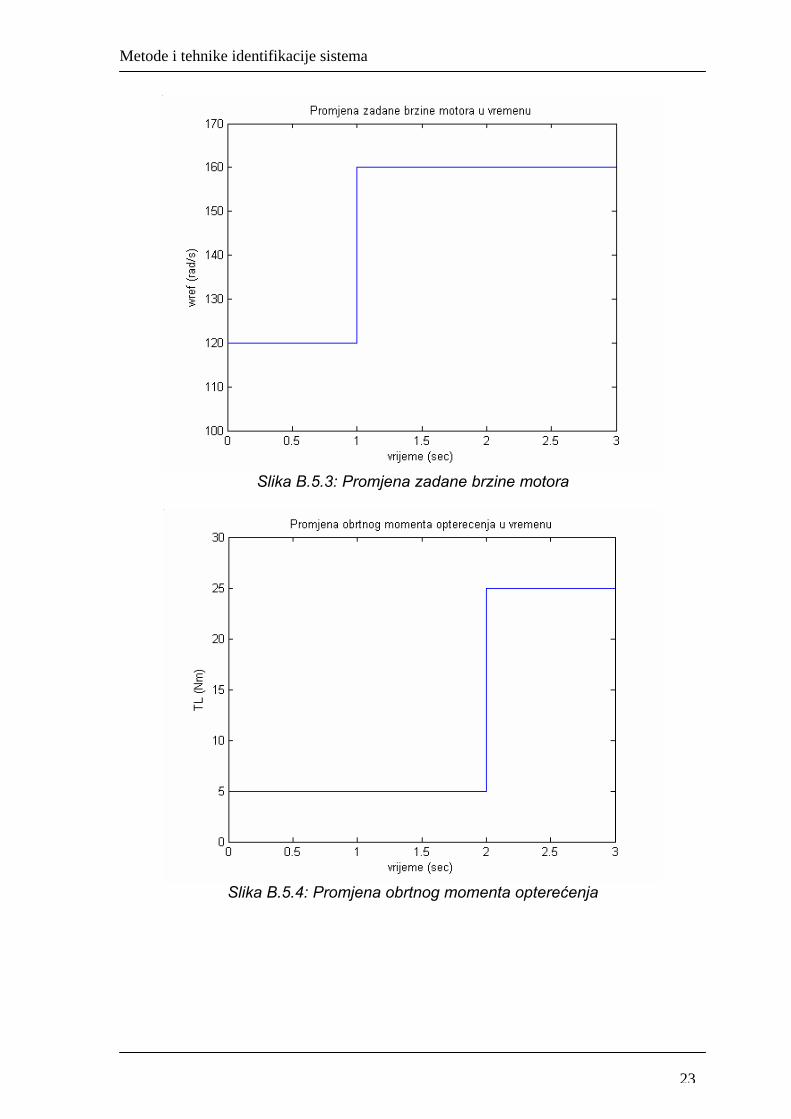
Primjer Chopper-Fed DC Motor Drive je realiziran između ostalog i sa ciljem da se pokažu mogućnosti MATLAB-a u modeliranju i simulaciji realnih elektromehaničkih sistema. Imajući to u vidu, jasno je da bi bilo interesantno simulirati ponašanje ovog sistema kada u stacionarnom stanju dođe do nekih poremećaja. Da bi se pokazalo ponašanje sistema u ovakvim situacijama, modelu su dodani i blokovi koji simuliraju nagle promjene obrtnog momenta opterećenja TL i ugaone brzine ωref u vidu step funkcija (blokovi obojeni svijetlo plavom bojom). U parametrima ovih blokova zadata su vremena u kojima će se primijeniti ove step funkcije. Tako je za ugaonu brzinu odabrano vrijeme 1,0 sec, a za obrtni moment 2,0 sec (trajanje simulacije je 3 sec). Vremenska promjena ovih signala prikazana je na slijedećim slikama:
22
Metode i tehnike identifikacije sistema
Slika B.5.3: Promjena zadane brzine motora
Slika B.5.4: Promjena obrtnog momenta opterećenja
23
Metode i tehnike identifikacije sistema
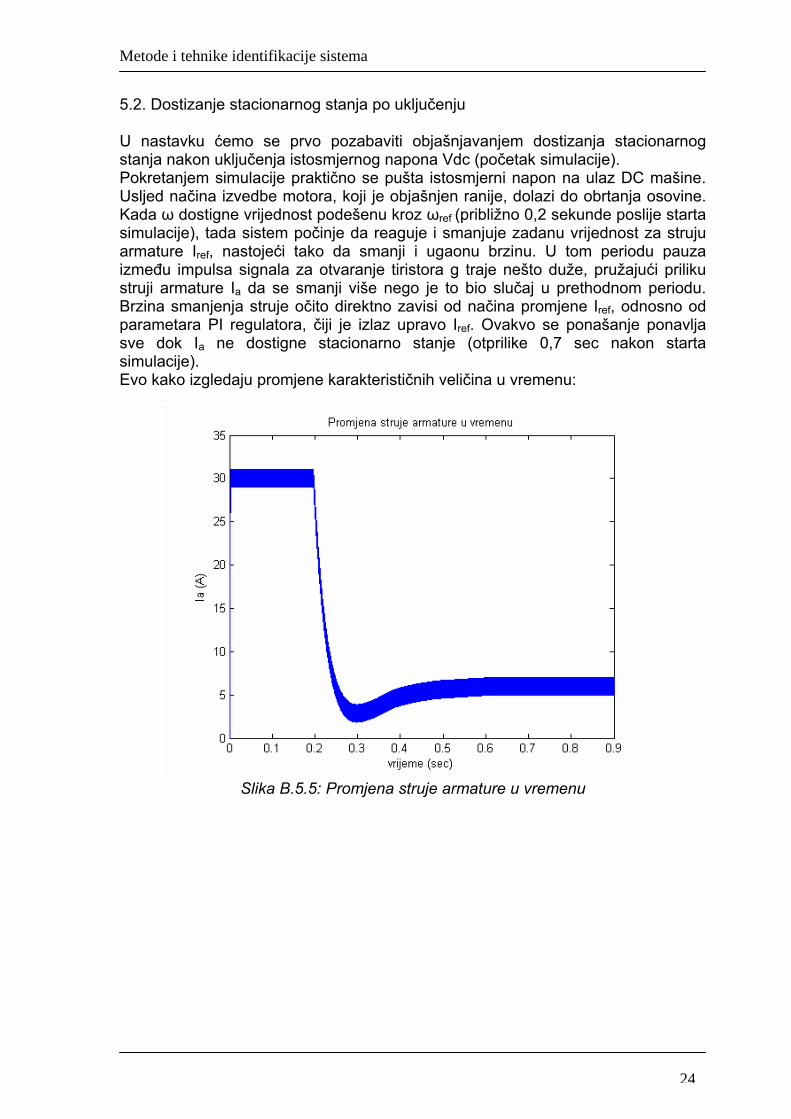
5.2. Dostizanje stacionarnog stanja po uključenju U nastavku ćemo se prvo pozabaviti objašnjavanjem dostizanja stacionarnog stanja nakon uključenja istosmjernog napona Vdc (početak simulacije). Pokretanjem simulacije praktično se pušta istosmjerni napon na ulaz DC mašine. Usljed načina izvedbe motora, koji je objašnjen ranije, dolazi do obrtanja osovine. Kada ω dostigne vrijednost podešenu kroz ωref (približno 0,2 sekunde poslije starta simulacije), tada sistem počinje da reaguje i smanjuje zadanu vrijednost za struju armature Iref, nastojeći tako da smanji i ugaonu brzinu. U tom periodu pauza između impulsa signala za otvaranje tiristora g traje nešto duže, pružajući priliku struji armature Ia da se smanji više nego je to bio slučaj u prethodnom periodu. Brzina smanjenja struje očito direktno zavisi od načina promjene Iref, odnosno od parametara PI regulatora, čiji je izlaz upravo Iref. Ovakvo se ponašanje ponavlja sve dok Ia ne dostigne stacionarno stanje (otprilike 0,7 sec nakon starta simulacije). Evo kako izgledaju promjene karakterističnih veličina u vremenu:
Slika B.5.5: Promjena struje armature u vremenu
24
Metode i tehnike identifikacije sistema
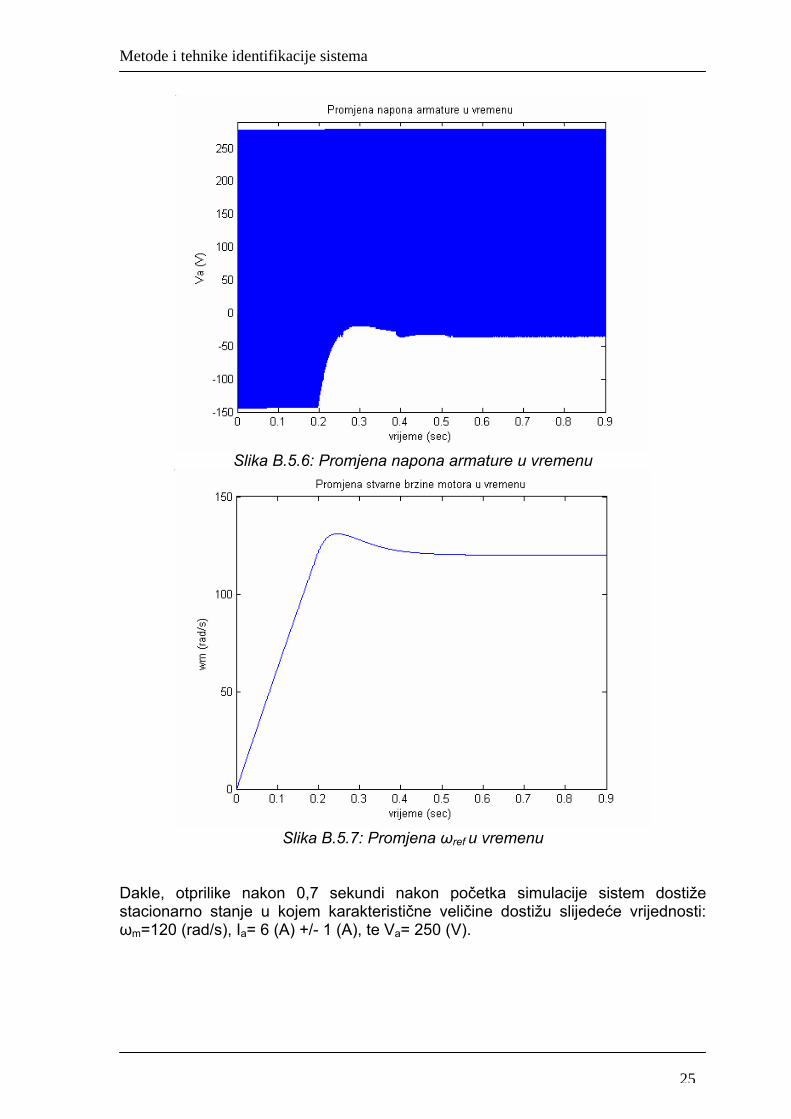
Slika B.5.6: Promjena napona armature u vremenu
Slika B.5.7: Promjena ωref u vremenu
Dakle, otprilike nakon 0,7 sekundi nakon početka simulacije sistem dostiže stacionarno stanje u kojem karakteristične veličine dostižu slijedeće vrijednosti: ωm=120 (rad/s), Ia= 6 (A) +/- 1 (A), te Va= 250 (V).
25
Metode i tehnike identifikacije sistema
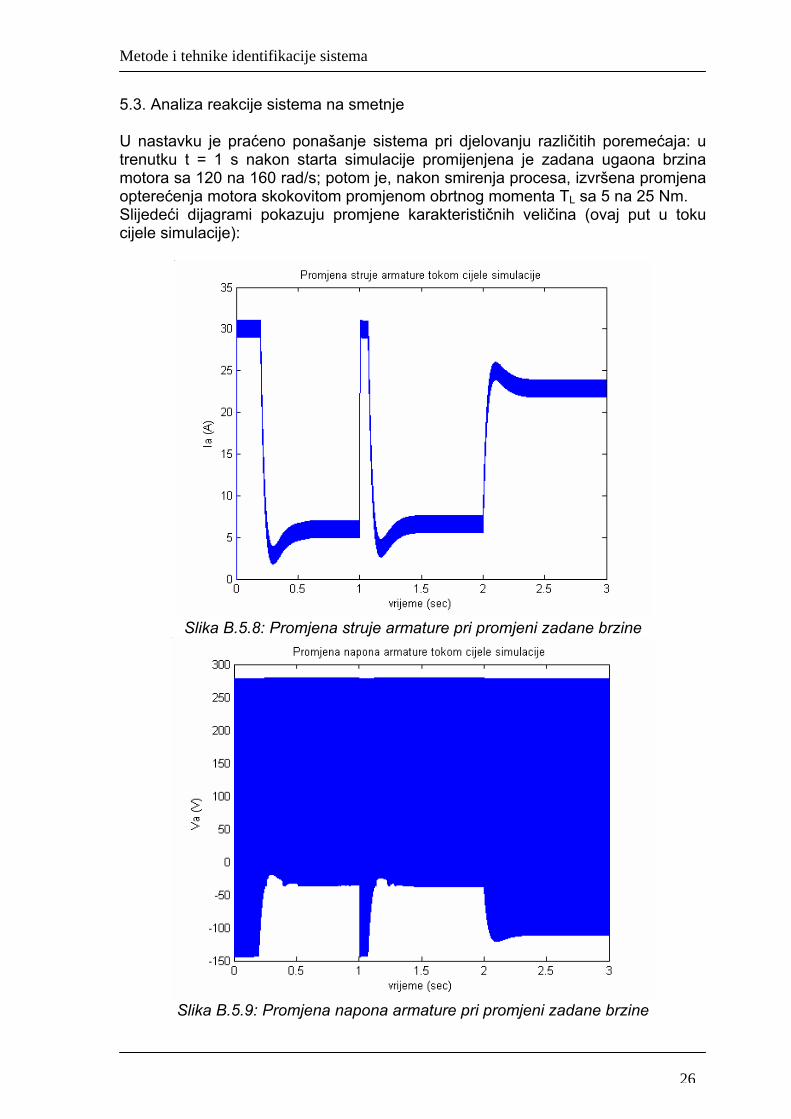
5.3. Analiza reakcije sistema na smetnje U nastavku je praćeno ponašanje sistema pri djelovanju različitih poremećaja: u trenutku t = 1 s nakon starta simulacije promijenjena je zadana ugaona brzina motora sa 120 na 160 rad/s; potom je, nakon smirenja procesa, izvršena promjena opterećenja motora skokovitom promjenom obrtnog momenta TL sa 5 na 25 Nm. Slijedeći dijagrami pokazuju promjene karakterističnih veličina (ovaj put u toku cijele simulacije):
Slika B.5.8: Promjena struje armature pri promjeni zadane brzine
Slika B.5.9: Promjena napona armature pri promjeni zadane brzine
26
Metode i tehnike identifikacije sistema
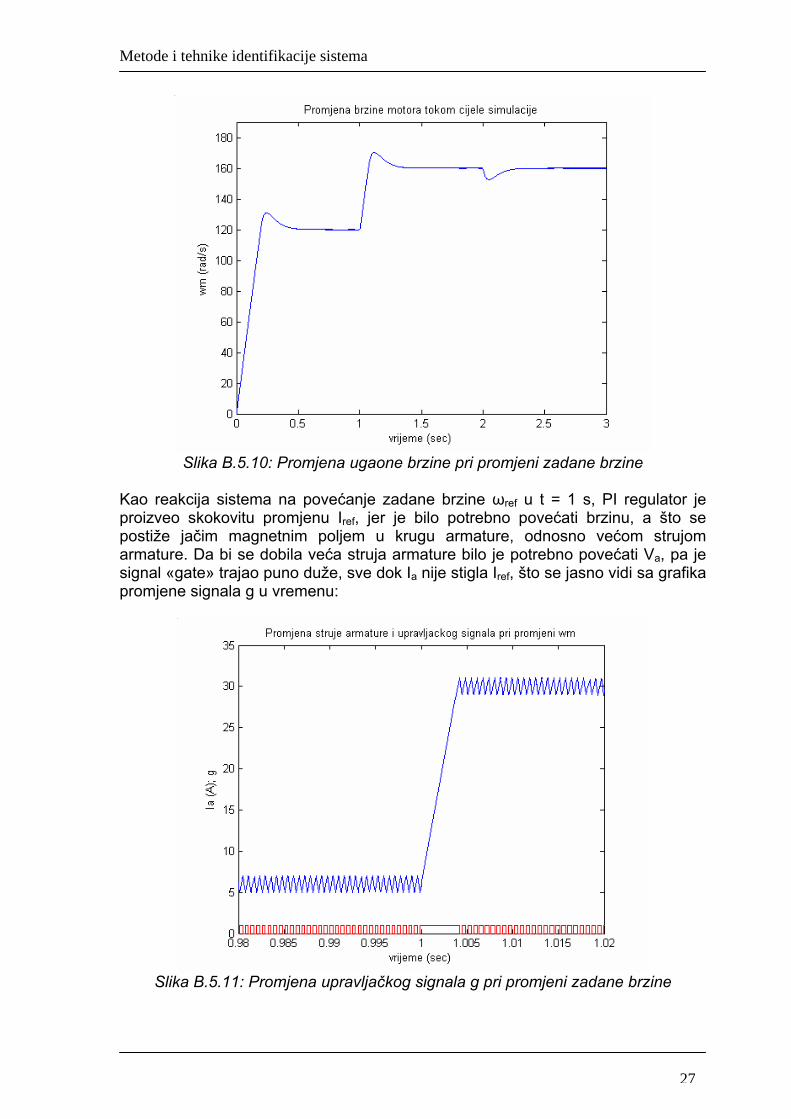
Slika B.5.10: Promjena ugaone brzine pri promjeni zadane brzine
Kao reakcija sistema na povećanje zadane brzine ωref u t = 1 s, PI regulator je proizveo skokovitu promjenu Iref, jer je bilo potrebno povećati brzinu, a što se postiže jačim magnetnim poljem u krugu armature, odnosno većom strujom armature. Da bi se dobila veća struja armature bilo je potrebno povećati Va, pa je signal «gate» trajao puno duže, sve dok Ia nije stigla Iref, što se jasno vidi sa grafika promjene signala g u vremenu:
Slika B.5.11: Promjena upravljačkog signala g pri promjeni zadane brzine
27
Metode i tehnike identifikacije sistema
Kada se proces smirio, u momentu t = 2 s, počela je skokovita promjena u opterećenju, kroz promjenu obrtnog momenta TL, što bi značilo da je osovina motora iz nekog razloga više opterećena. Kao prva reakcija sistema javlja se pad brzine ωref, jer je narušen energetski balans. Nakon toga, regulator brzine traži povećanje brzine kroz povećanje Iref, a taj zahtjev prati regulator struje, te se praktično ponavlja opis iz prve simulacije. Primjetimo na slici B.5.8. da je struja armature Ia dostigla novo stacionarno stanje Ia ≈ 23 (A), što je i logično. Naime, ako je motor više opterećen, onda je jasno da je potrebno uložiti više energije da bi se on nastavio obrtati istom brzinom. 5.4. Analiza podešenja parametara PI regulatora U nastavku će u kratkim crtama biti analiziran kvalitet regulacije ugaone brzine DC motora kod Chopper-Fed DC motor drive-a. Za analizu kvaliteta neke regulacije potrebno je razmatrati slijedeće parametre:
• Veličinu prvog preskoka • Vrijeme smirenja procesa • Statičku grešku
Podešavanje vrijednosti parametara regulatora se vrši u cilju zadovoljavanja gore navedenih veličina, čije se vrijednosti definišu prije početka podešavanja. Obzirom da pomenute vrijednosti u ovom slučaju nisu poznate, valja pretpostaviti da vrijednosti parametara PI regulatora (Kp i Ki) prikazane u dobivenom modelu (psbdcdrive.mdl) zapravo zadovoljavaju kriterije kvaliteta regulacije. Ipak, da bi se stekao nekakav osjećaj za veličinu ovih parametara, razmotrimo u nastavku nekoliko slučajeva u kojima su korištene različite vrijednosti pojačanja Kp i Ki. 1. Kp = 1, Ki = 0 (P regulator) Pri ovim podešenjima parametara, dijagram dostizanja stacionarnog stanja za ugaonu brzinu ωm izgleda ovako:
28
Metode i tehnike identifikacije sistema
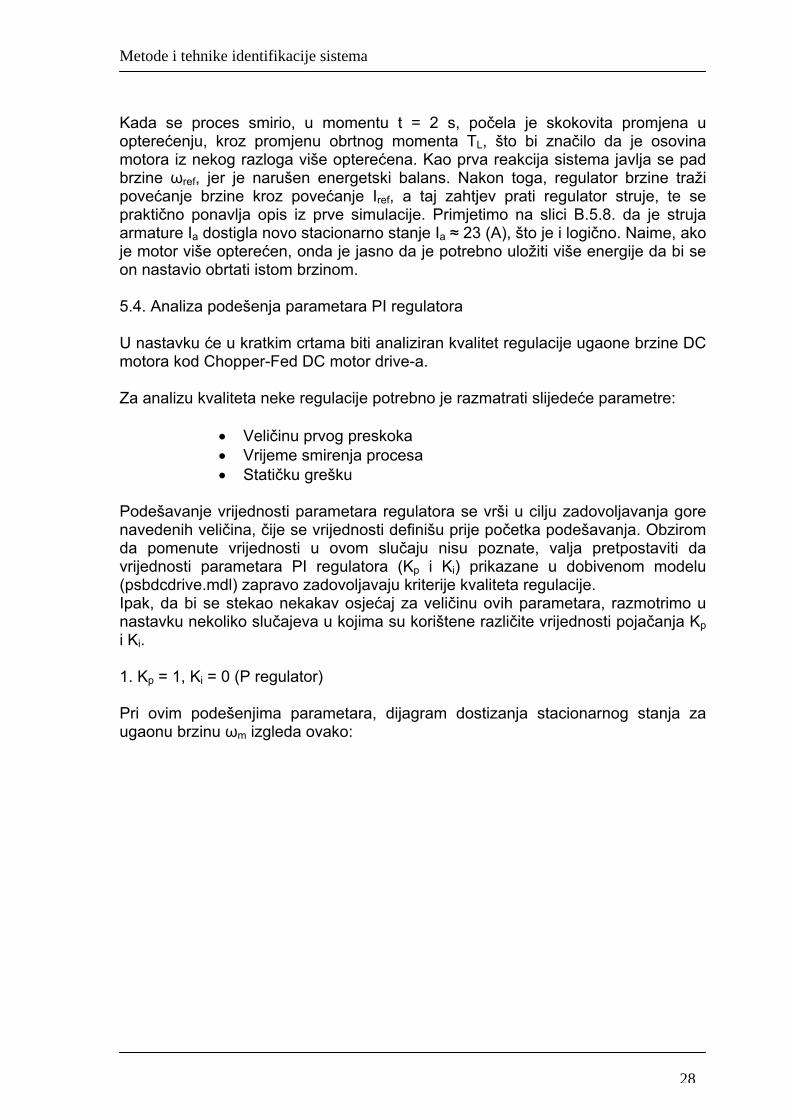
Slika B.5.12: Promjena ugaone brzine pri Kp=1 i Ki=0
Obzirom da se u ovom slučaju radi o brzini DC motora, statička greška regulatora bi trebala da bude iznimno mala, tako da P regulator sa prikazanom statičkom greškom od par rad/s svakako nije dobar izbor. Situacija se ne mijenja bitnije ni sa znatnim povećanjem pojačanja, iz čega se zaključuje da je za tačniju regulaciju neophodno koristiti i I komponentu regulatora. 2. Kp = 1, Ki = 10 Dijagram promjene ugaone brzine sada izgleda ovako:
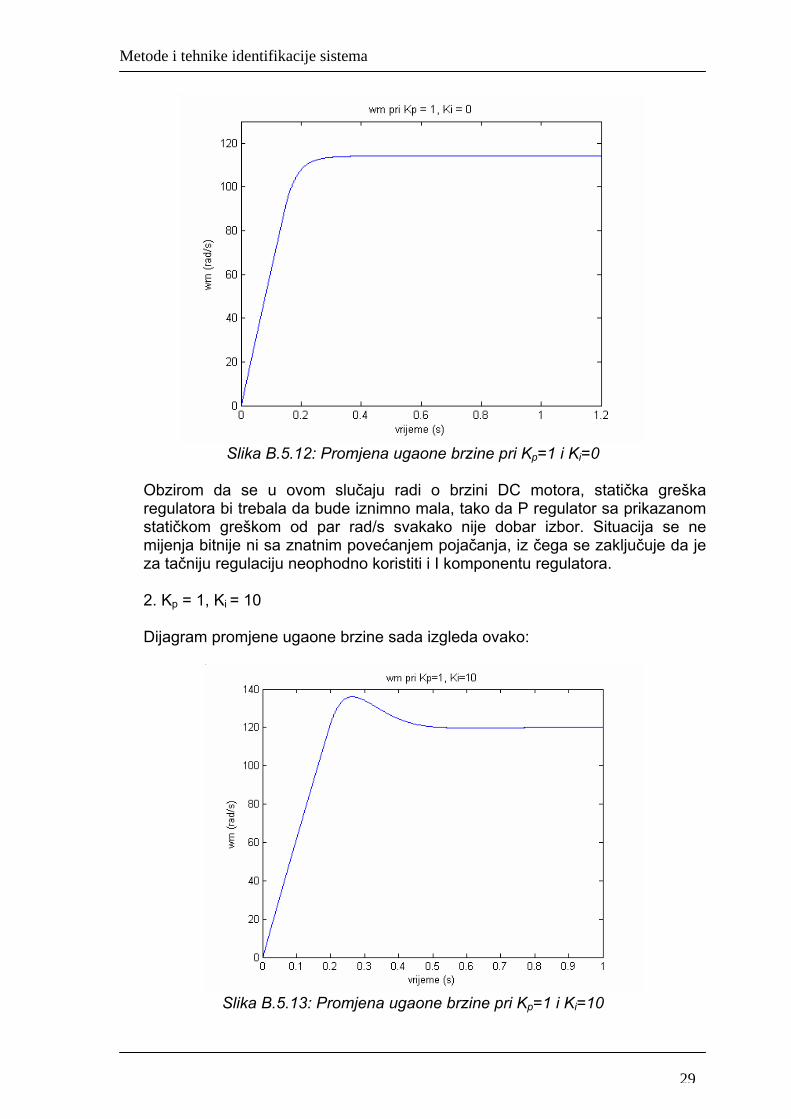
Slika B.5.13: Promjena ugaone brzine pri Kp=1 i Ki=10
29
Metode i tehnike identifikacije sistema
Sada registrujemo mnogo tačniju regulaciju, pri čemu je statička greška približno 0.01% od zadane vrijednosti. Međutim, imamo veliki prvi preskok (16 rad/s), javlja se i drugi preskok (0,3 rad/s), a vrijeme smirenja je otprilike 0.8 s. Naredni koraci bi bili smanjenje veličine preskoka i skraćivanje vremena smirenja procesa. U tom smislu bi trebalo reagovati povećanjem pojačanja Kp, sa ciljem smanjenja prvog preskoka. 3. Kp=3, Ki=10 Dijagram promjene ugaone brzine izgleda ovako:
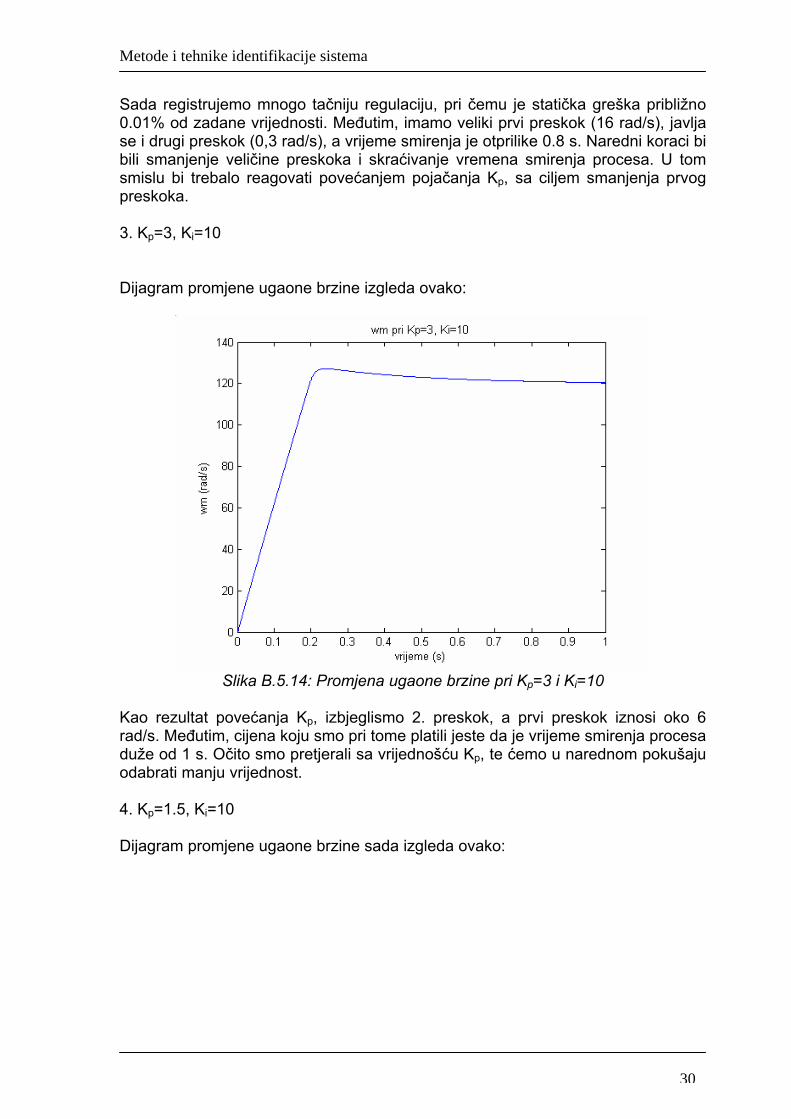
Slika B.5.14: Promjena ugaone brzine pri Kp=3 i Ki=10
Kao rezultat povećanja Kp, izbjeglismo 2. preskok, a prvi preskok iznosi oko 6 rad/s. Međutim, cijena koju smo pri tome platili jeste da je vrijeme smirenja procesa duže od 1 s. Očito smo pretjerali sa vrijednošću Kp, te ćemo u narednom pokušaju odabrati manju vrijednost. 4. Kp=1.5, Ki=10 Dijagram promjene ugaone brzine sada izgleda ovako:
30

Metode i tehnike identifikacije sistema
Slika B.5.15: Promjena ugaone brzine pri Kp=1.5 i Ki=10
Na slici je prikazan samo najinteresantniji dio grafika. Smanjenjem Kp povećali smo vrijednost prvog preskoka, ali je on ipak manji od 10% od vrijednosti u stacionarnom stanju. Proces se smiruje za oko 1 s, uz statičku grešku < 0.02%. U narednom koraku ćemo probati smanjiti vrijeme smirenja procesa, povećavanjem Ki. 5. Kp=1.5, Ki=15 Dijagram sada izgleda ovako:
Slika B.5.16: Promjena ugaone brzine pri Kp=1.5 i Ki=15
31
Metode i tehnike identifikacije sistema
Ovim potezom smo ostavili prvi preskok u granici < 10%, nemamo drugog preskoka, statička greška je također < 0.01%, dok je vrijeme smirenja procesa smanjeno na nekih 0.7 sekundi. Dostignute karakteristike regulacije se ne razlikuju vidljivo od regulacije koja se postiže sa parametrima originalno postavljenim u fajlu psbdcdrive.mdl (Kp=1.6, Ki=16). Treba napomenuti da se kao parametar kvaliteta regulacije može posmatrati i vrijeme prvog preskoka, odnosno vrijeme prvog dostizanja zadane vrijednosti. U ovom slučaju ovo vrijeme iznosi oko 0.2 s, a na njega se najviše utiče izborom ograničenja Ilim, koje je također parametar bloka Speed Controller. Ovaj parametar nisam mijenjao zato što on direktno zavisi od fizičkih karakteristika sistema (debljina korištenog provodnika), jer predstavlja ograničenje na iznos struje armature koja se dopušta kod motora. Pretpostavio sam da je podešena vrijednost od 30 A maksimalna dozvoljena vrijednost za struju armature.
32
Metode i tehnike identifikacije sistema
LITERATURA
1. «Modeliranje dinamičkih sistema», Adnan Salihbegović, Svjetlost , Sarajevo 1985
2. «Metode modeliranja procesa», Adnan Salihbegović, Postdiplomski studij na AiE, April 2004.
3. «Metode identifikacije procesa», Adnan Salihbegvoić, Postdiplomski studij na AiE, Februar 2004.
4. «DC Series Motor», Thomas E. Kissell, Industrial Electronics, Second Edition, Prentice Hall PTR
33