ele539a: optimization of communication systems lecture …chiangm/unconstrained.pdf ele539a:...
TRANSCRIPT

ELE539A: Optimization of Communication Systems
Lecture 18: Algorithms for Unconstrained
Optimization
Professor M. Chiang
Electrical Engineering Department, Princeton University
March 27, 2006

Lecture Outline
• Unconstrained minimization problems
• Gradient method
• Newton method
• Equality constrained minimization problems
Unconstrained Minimization Problems
Given f : Rn → R convex and twice differentiable:
minimize f(x)
Optimizer x∗. Optimized value p∗ = f(x∗)
Necessary and sufficient condition of optimality:
∇f(x∗) = 0
Solve a system of nonlinear equations: n equations in n variables
Iterative algorithm: computes a sequence of points {x(0), x(1), . . .} such
that
limk→∞
f(x(k)) = p∗
Terminate algorithm when f(x(k)) − p∗ ≤ ǫ for a specified ǫ > 0

Examples
• Least-squares: minimize
‖Ax − b‖22 = xT (AT A)x − 2(AT b)T x + bT b
Optimality condition is system of linear equations:
AT Ax∗ = AT b
called normal equations for least-squares
• Unconstrained geometric programming: minimize
f(x) = log
mX
i=1
exp(aTi x + bi)
!
Optimality condition has no analytic solution:
∇f(x∗) =1
Pmj=1 exp(aT
j x∗ + bj)
mX
i=1
exp(aTi x∗ + bi)ai = 0

Strong Convexity
f assumed to be strongly convex: there exits m > 0 such that
∇2f(x) � mI
which also implies that there exists M ≥ m such that
∇2f(x) � MI
Bound optimal value:
f(x) −1
2m‖∇f(x)‖2
2 ≤ p∗ ≤ f(x) −1
2M‖∇f(x)‖2
2
Suboptimality condition:
‖∇f(x)‖2 ≤ (2mǫ)1/2 ⇒ f(x) − p∗ ≤ ǫ
Distance between x and optimal x∗:
‖x − x∗‖2 ≤2
m‖∇f(x)‖2

Descent Methods
Minimizing sequence x(k), k = 1, . . . , (where t(k) > 0)
x(k+1) = x(k) + t(k)∆x(k)
∆x(k): search direction
t(k): step size
Descent methods:
f(x(k+1)) < f(x(k))
By convexity of f , search direction must make an acute angle with
negative gradient:
∇f(x(k))T ∆x(k) < 0
Because otherwise, f(x(k+1)) ≥ f(x(k)) since
f(x(k+1)) ≥ f(x(k)) + ∇f(x(k))T (xk+1) − x(k))

General Descent Method
GIVEN a starting point x ∈ dom f
REPEAT
1. Determine a descent direction ∆x
2. Line search: choose a step size t > 0
3. Update: x := x + t∆x
UNTIL stopping criterion satisfied

Line Search
• Exact line search:
t = argmins≥0
f(x + s∆x)
• Backtracking line search:
GIVEN a descent direction ∆x for f at x, α ∈ (0, 0.5), β ∈ (0, 1)
t := 1
WHILE f(x) − f(x + t∆x) < α|∇f(x)T (t∆x)|, t := βt
Caution: t such that x + t∆x ∈ dom f

Gradient Descent Method
GIVEN a starting point x ∈ dom f
REPEAT
1. ∆x := −∇f(x)
2. Line search: choose a step size t > 0
3. Update: x := x + t∆x
UNTIL stopping criterion satisfied
Theorem: we have f(x(k)) − p∗ ≤ ǫ after at most
log((f(x(0)) − p∗)/ǫ)
log“
11−m/M
”
iterations of gradient method with exact line search

Example in R2
minimize f(x) =1
2(x2
1 + γx22), x∗ = (0, 0)
Gradient descent with exact line search:
x(k)1 = γ
„
γ − 1
γ + 1
«k
, x(k)2 =
„
−γ − 1
γ + 1
«k
−10 0 10
−4
0
4
x0
x1
x1
x2

Example in R2
x0
x1
x2
0 5 10 15 20 2510
−15
10−10
10−5
100
105
b
k
erro
rx
Which error decay curve is by backtracking and which is by exact line
search?
Observations
• Exhibits approximately linear convergence (error f(x(k)) − p∗ converges
to zero as a geometric series)
• Choice of α, β in backtracking line search has a noticeable but not
dramatic effect on convergence speed
• Exact line search improves convergence, but not always with
significant effect
• Convergence speed depends heavily on condition number of Hessian

Newton Method
Newton step:
∆xnt = −∇2f(x)−1∇f(x)
Positive definiteness of ∇2f(x) implies that ∆xnt is a descent direction
Interpretation: linearize optimality condition ∇f(x∗) = 0 near x,
∇f(x + v) ≈ ∇f(x) + ∇2f(x)v = 0
Solving this linear equation in v, obtain v = ∆xnt. Newton step is the
addition needed to x to satisfy linearized optimality condition

Main Properties
• Affine invariance: given nonsingular T ∈ Rn×n and let f̄(y) = f(Tx).
Then Newton step for f̄ at y:
∆ynt = T−1∆xnt
and
x + ∆xnt = T (y + ∆ynt)
• Newton decrement:
λ(x) =“
∇f(x)T∇2f(x)−1∇f(x)”1/2
=“
∆xTnt∇
2f(x)∆xnt
”1/2
Let f̂ be second order approximation of f at x. Then
f(x) − p∗ ≈ f(x) − infy
f̂(y) = f(x) − f̂(x + ∆xnt) =1
2λ(x)2

Newton Method
GIVEN a starting point x ∈ dom f and tolerance ǫ > 0
REPEAT
1. Compute Newton step and decrement: ∆xnt = −∇2f(x)−1∇f(x) and
λ =`
∇f(x)T∇2f(x)−1∇f(x)´1/2
2. Stopping criterion: QUIT if λ2
2≤ ǫ
3. Line search: choose a step size t > 0
4. Update: x := x + t∆x
Advantages of Newton method: Fast, Robust, Scalable
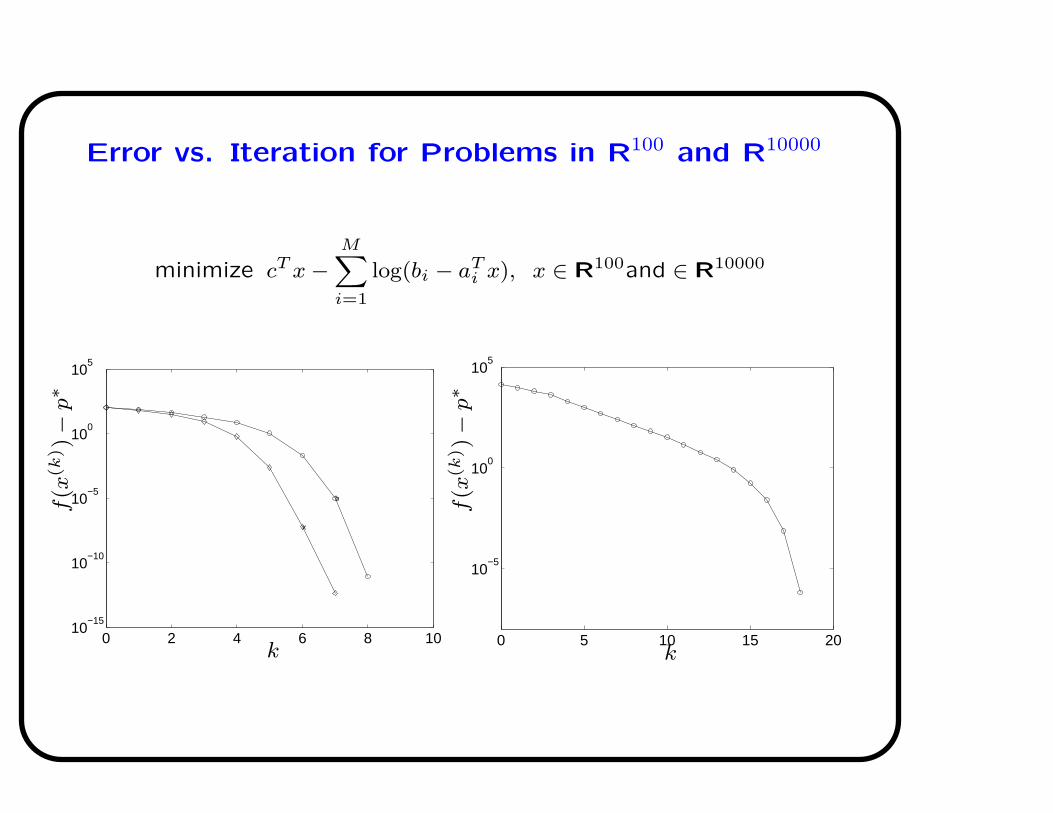
Error vs. Iteration for Problems in R100 and R10000
minimize cT x −MX
i=1
log(bi − aTi x), x ∈ R100and ∈ R10000
0 2 4 6 8 1010
−15
10−10
10−5
100
105
b
x
k
f(x
(k))−
p∗
0 5 10 15 20
10−5
100
105
k
f(x
(k))−
p∗

Equality Constrained Problems
Solve a convex optimization with equality constraints:
minimize f(x)
subject to Ax = b
f : Rn → R is twice differentiable
A ∈ Rp×n with rank p < n
Optimality condition: KKT equations with n + p equations in n + p
variables x∗, ν∗:
Ax∗ = b, ∇f(x∗) + AT ν∗ = 0
Approach 1: Can be turned into an unconstrained optimization, after
eliminating the equality constraints

Example With Analytic Solution
Convex quadratic minimization over equality constraints:
minimize (1/2)xT Px + qT x + r
subject to Ax = b
Optimality condition:
2
4
P AT
A 0
3
5
2
4
x∗
ν∗
3
5 =
2
4
−q
b
3
5
If KKT matrix is nonsingular, there is a unique optimal primal-dual pair
x∗, ν∗
If KKT matrix is singular but solvable, any solution gives optimal x∗, ν∗
If KKT matrix has no solution, primal problem is unbounded below

Approach 2: Dual Solution
Dual function:
g(ν) = −bT ν − f∗(−AT ν)
Dual problem:
maximize − bT ν − f∗(−AT ν)
Example: solve
minimize −Pn
i=1 log xi
subject to Ax = b
Dual problem:
maximize − bT ν +nX
i=1
log(AT ν)i
Recover primal variable from dual variable:
xi(ν) = 1/(AT ν)i

Approach 3: Direct Derivation of Newton Method
Make sure initial point is feasible and A∆xnt = 0
Replace objective with second order Tayler approximation near x:
minimize f̂(x + v) = f(x) + ∇f(x)T v + (1/2)vT ∇2f(x)v
subject to A(x + v) = b
Find Newton step ∆xnt by solving:
2
4
∇2f(x) AT
A 0
3
5
2
4
∆xnt
w
3
5 =
2
4
−∇f(x)
0
3
5
where w is associated optimal dual variable of Ax = b
Newton’s method (Newton decrement, affine invariance, and stopping
criterion) stay the same

Lecture Summary
• Iterative algorithm with descent steps for unconstrained minimization
problems
• Gradient method and Newton method
• Convert equality constrained optimization into unconstrained
optimization
Chapters 9.1-9.3, 9.5 and 10.1-10.2 in Boyd and Vandenberghe