eindhoven university of technology master toepassing van ... · pam alternating current alternate...
TRANSCRIPT

Eindhoven University of Technology
MASTER
Toepassing van partial response codering in een BPSK-modem
Tholen, H.J.G.M.
Award date:1986
Link to publication
DisclaimerThis document contains a student thesis (bachelor's or master's), as authored by a student at Eindhoven University of Technology. Studenttheses are made available in the TU/e repository upon obtaining the required degree. The grade received is not published on the documentas presented in the repository. The required complexity or quality of research of student theses may vary by program, and the requiredminimum study period may vary in duration.
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain

FACULTEIT DER ELEKTROTECHNIEK
TECHNISCHE UNIVERSITEIT EINDHOVEN
VAKGROEP TELECOMMUNICATIE
TOEPASSING VAN PARTIAL RESPONSE
CODERING IN EEN BPSK-MODEM
door H.J.G.M. Tholen
Verslag van het afstudeerwerk verricht van november '85
tot oktober '86
Afstudeerhoogleraar: Prof. J.C. Arnbak
Begeleider: Ir. A.P. Verlijsdonk
De faculteit der elektrotechniek van de Technische UniversiteitEindhoven aanvaardt geen verantwoordelijkheid voor de inhoud vanstage- en afstudeerverslagen.

INHOUO
SAMENVATTING
LIJST VAN GEBRUIKTE AFKORTINGEN EN SYMBOLEN
pag.
2
HOST 1
HOST 2 :
2. 1
2.2
2.3
2.4
HOST 3
3. 1
3.2
3.2. 1
3.3.
3.4
3.5
3.6
HOST 4
4.
4.2
4.3
4.4
4.5
H1LEIOING
PARTIAL RESPONSE SIGNALLING
Modified Ouobinary coding en dicode
Pals functie van SiNe
De spectrale vermogensdichtheid van het
gecodeerde datasignaal
Implementatie van de coder
OPTIMALE OECOOERING VAN PRS
Maximum-Likelihood Sequence
Estimation
Beschrijving van 2 praktische algoritmen
Het Ferguson-algoritme
Het Forney-algoritme
De invloed van buffer overflow
Simulatie van de praktische algoritmen
Implementatie van de Ferguson-decoder
Met in g en en con c 1 u s i e s.
DE BASISBAND-ONTVANGER
Systeembeschouwing
Het ontvangfilter
De klokterugwinning
Afleiding van de drempelwaarde
Implementatie van de basisband-ontvanger
4
12
1620
23
24
""26
32
34
37
42
44
48
54
57
60
61

HOST 5 :
5. 1
5.2
5.3
5.4
MODULATIE EN COHERENTE DEMOOULATIE
Vermogenseffici~ntie van het
voorgestelde systeem 66
Lineaire modulatie met draaggolfpiloot 69
Draaggolfterugwinning en demodulatie ?4
Implementatie van modulator en demodulator 81
HOST 6
HOST 7
LITERATUUR
APPENDIX 1
BER-METINGEN MET HET TOT ALE SYSTEEM
CONCLUSIES EN AANBEVELINGEN
BESCHRIJVING VAN DE SIMULATIEPROGRAMMA'S
85
.89
91
93
APPENDIX 2 SIMULATIE- EN MEETRESULTATEN VAN DE DECODER 10?
APPENDIX 3
A3.1 :
A3.2:
A3.3:
A3.4:
A3.5:
BESCHRIJVING VAN DE MODULES
Encoder en modulator
De mengtrap
De coherente demodulator
De basisband-ontvanger
De MLSE-decoder
109
111
113
116
119

SAMENVATTING
Oit verslag beschrijft een vereenvoudigd systeem voor
draaggolfterugwinning in coherente PSK-modems door het
gebruik van Partial Response Signalling (PRS).
PRS is een vorm van kanaalcodering, waarmee het
mogelijk is am het basisband dataspectrum te ontdoen van
zijn laagfrequent-inhoud teneinde de weg vrij te maken
voor het inplanten van een draaggolfpiloot in het
gemoduleerde signaal. In de demodulator kan nu worden
volstaan met het volgen van deze piloot m.b.v. een PLL.
In een conventionele PSK-demodulator wordt een harmonische
van de draaggolffrequentie verkregen d.m.v. een niet-lineaire
operatie op het signaal. Berekeningen tonen aan dat de
eenvoudige draaggolfterugwinning via de piloot weinig onder
hoeft te doen voor het meer complexe conventionele systeem.
Een nadeel van de gebrui~te vorm van PRS is het ontstaan
van 3 niveau's in het gecodeerde datasignaal. Conventionele
symbool-voor-symbool-detectie in de ontvanger geeft daardoor
een degradatie van 3 dB in de Pe
versus Eb
/N0-karakteristiek,
vergeleken met de transmissie van een binair datasignaal.
Een decoder volgens het principe van Maximum-Likelihood
Sequence Estimation kan deze degradatie echter vrijwel geheel
opheffen door gebruik te maken van de inherente redundantie
in het driewaardige datasignaal.
Een praktisch decoderings-algoritme op deze basis, dat een
variant is van het Viterbi-algoritme voor convolutionele
codes, is d.m.v. computersimulaties op zijn bruikbaarheid
getoetst en blijkt uitste~end te voldoen. Het algoritme is
b 0 v P Ii die 11 ]' e 1 a tie fee n v 0 u dig i n h a r d war e t e imp 1 em en t ere n ,
zoals bliJ~t uit de beschrijving van de Mbit/s BPSK-modem
die uolgens het bovenstaande principe werd gebouwd.
1

LIJST VAN GEBRUIKTE AFKORTINGEN EN SYMBOLEN
AC
AMI
A/D
AGC
AM
BER
BL
BPF
BPSK
CMOS
CODEC
CRO
DBM
DC
DSB
FET
I/O
IF
lSI
L F'C:
MOB
MODEM
MUX
NRZ
PAM
Alternating Current
Alternate Mark Inversion
Analoog-naar-Digitaal (omzetter)
Automatic Gain Control
Amplitude Modulatie
Bit Error Rate
Ruisbandbreedte van een PLL
Band-pass Filte:
Binary Phase Shift Keying
Complementary Metal Oxide Silicon
Coder-Decoder combinatie
Cosine Roll-Off (filter-karakteristiek)
Double Balanced Mixer
Direct Current
Double Sideband Modulation
Oigitaal Tranversaal Filter
Gemiddelde Energie-per-bit gedeeld door
ruisdichtheid
Field Effect Transistor
Integrate-and-Dump (circuit)
Intermediate Frequency
lntersymbool Interferentie
Fasedetector-constante
VCO-overdrachtsconstante
Local Oscillator
Low-pass Filtel'
Modified Duobinary (coding)
Maximum-Likelihood Sequence Estimation
Modulator-Demodulator combinatie
Multiplexer
Non-Return-to-Zero (pulsvorm)
PuIs Amplitude Modulatie
Prlase Detector
2

F'e
F'LL
PM
PRBS
PRS
QPSK
QPRS
RMS
S/H
SIN
TTL
VCO
Foutenkans
Phase LOCKed Loop
Phase Modulation
Pseudo-Random Binary Sequence
Partial Response Signalling
Quadrature Phase Shift Keying
Quadrature Partial Response Signalling
Root Mean Square
Sample-and-Hold (circuit)
Signaal/ruisverhouding
Transistor-Transistor Logic
Voltage Controlled Oscillator
Natuurlij~e frequentie van een PLL
Dempingsfaktor van een PLL
3

HOOFDSTUK 1: INLEIDING
Door de steeds verder voortschrijdende digitalisering
van informatiesystemen en communicatienetwerken, wordt
de ontwikkeling van effici~nte digitale transmissie
systemen steeds belangrijker. Bij de transmissie van een
digitaal signaal via kabels kan vaak volstaan worden met
Iijncodering, maar voor de overdracht via radio- of
sateIIietkanaIen is modulatie met een draaggolf nood
zakeIijk. Bij het ontwerp van de modems die hiervoor
gebruikt worden, zijn het zendvermogen en de kanaal
bandbreedte vaak beperkende faktoren.
Als een compromis tussen effici~ntie in vermogen en
bandbreedte wordt als modulatiemethode vaak Phase Shift
Keying gebruikt. Hierbij wordt de fase van een draaggolf
in het ritme van het digitale signaal gevarieerd.
De eenvoudigste vorm van Phase Shift Keying is BPSK,
waarbij de fase tussen 0 en 180 graden wordt geschakeld.
QPSK met fases 0,90,180 en 270 graden wordt in de
praktijk meer gebruikt.
In figuur is de spectrale vermogensdichtheid van
in dB
een BPSK- of QPSK-gemoduleerd signaal te zien.
i G(f)
o
f -fc s f + fc s
f
Fig. 5pectrale vermogensdichtheid van een PSK
gemoduleerd signaal.
4

Omdat een symbool bij QPSK bestaat
In figuur
f5
bits,
wordt de symboolsnelheid aangegeven met
uit 2 basisband
is de bitsnelheid dus het dubbele ver~eleken met
BPSK in dezelfde bandbreedte.
QPSK is behalve als een vorm van vierfase-modulatie
ook te beschouwen als BPSK op 2 orthogonale draaggolven,
Wt. De uitdrukking voor dec
idea Ie coherente detectie is daarom voor
b.v. sin (J t en cosc
foutenkans bij
be ide systemen gelijk. Voor deze coherente detectie is
uiteraard Een referentie-araa~~olf noodzakelijk.
Indien de aangeboden bits random, ongecorreleerd en even
waarschijnlijk zijn, is in het PSK-gemoduleerde signaal
echter geen draaggolfcomponent aanwezig (zie fig. 1).
Het mag duidelijk zijn dat zo'n component met de draag
golffrequentie door een lineaire operatie op het signaal
ook niet opgewekt kan worden.
In het geval van BPSK kan een component met de
dubbele draaggolffrequentie worden gegenereerd door het
gemoduleerde signaal met zichzelf te vermenigvuldigen.
O . t f 18",0oor d1 kwadrateren gaan de asesprongen van v
namelijk over in fasesprongen van 360 0 oftewel 00
.
Door het uitgangssignaal van de kwadrator met een PLL
te volgen en de resulterende VCO-frequentie door 2 te
delen, ontstaat een 'schone' referentiedraaggolf.
Deze zgn. 'squaring loop' is getekend in fig. 2. De
kwadrator wordt hierin voorafgegaan door een bandfilter
dat breed genoeg moet zijn om de modulatie door te
laten. In ref. [8] wordt afgeleid dat de signaal
ruisverhouding van de tweede harmonische in de lusband
breedte van de PLL 6 dB slechter is dan in een verge
lijkbaar geval zonder kwadrator. Dit wil zeggen dat de
PLL al bij een 6 dB hogere ingangssignaal/ruisverhouding
uit locK zal vallen.
De fasejitter in het signaal na de deler van figuur 2
zal echter voor hoge SIN niet groter zijn dan in zo'n
eerste orde systeem zonder kwadrator. Met de frequentie
5

wordt namelijk ook de fasejitter door de deler gedeeld.
BW> ~T
Frequencydoubler
m(t)s;n w,r m 2 (t) cos 2w,t1------.-/ (.)2 t-----'1)~)---001
.-_--{ tV .....__..J
2w,
Inpu1- S;gnal
phasers al w,
+90"
--+---90"
Phase" ou1 0 (frequenc>, Qoubler
at 2w,
+ 180" _____-lBcr~--
Local carrier:o or 180" equally likely
(To demodulator)
Fig. 2: 'Squaring loop' voor draaggolfterugwinning
bij BPSK (zie ref. [8J).
Voor lagere SIN zal door intermodulatie van de ruis
wel een extra fasejitter-term ontstaan; het zgn.
'squaring loss'. In de teruggewonnen draaggolf ant staat
door de deler verder een ambigurteit van 1800
in de
fase; deze treedt echter ook in andere draaggolfterug
winningscircuits op en is dus geen specifiek nadeel van
de squaring loop. Om de resulterende onzekerheid in het
teken van de databits op te lassen kan differenti~le
codering van de data toegepast worden.
Voor draaggolfterugwinning bij QPSK is een vierdea
orde niet-lineariteit nodig am de fasesprongen van 90
te verwijderen. Hierdoor ontstaat een component van 4
maal de draaggolffrequentie, die dus vervolgens door 4
g~dE'::o:.; i,\oet wOl'den am een referentiedraaggolf te
krijgen. Na deling kan de draaggolf zich in 4 toestanden
bevinden en de data zullen weer moeten worden voorgeco
deerd am deze viervoudige onzekerheid op te lassen. (zie
ref. [2J p. 168) .
6

Door het gebruik van de vierde orde niet-lineariteit
zal voor QPSK de SiN in de lusbandbreedte van de PLL
12 dB slechter zijn dan bij een eerste orde systeem.
Verder zal ook hier door intermodulatie van de ruis een
extra fasejitter-term ontstaan bij lage SIN. In het
praktische geval van bandbegrensde pulsen ontstaat
bovendien nog een fasejitter-term die onafhankelijk is
van de ruis: de zgn. 'pattern jitter' (zie ref. [2J ).
Omdat de bewerkingen voor de draaggolfterugwinning op
IF-niveau in een demodula~or moeten plaatsvinden, is het
vooral in het geval van QPSK met coherente demodulatie
zo dat deze draaggolfterugterugwinning de complexiteit
van de modem bepaalt.
Wanneer we bij de zender een draaggolfpiloot in het
gemoduleerde signaal zouden plaatsen, dan zou bij de
ontvanger de draaggolf met een veel eenvoudiger circuit
teruggewonnen kunnen worden. Een vereiste hiervoor is
weI dat het spectrum van het gemoduleerde signaal een
nulpunt voor de draaggolffrequentie heeft. De laag
frequent inhoud van het basisband datasignaal moet
verwijderd worden om aan deze eis te voldoen.
Een bezwaar van deze methode is natuurlijk het
gebruik van vermogen voor de draaggolfpiloot, waardoor
er bij gelijkblijvend zendvermogen minder vermogen
Qverblijft voor het datasignaal. Als gevolg hiervan
verslechtert de foutenkans als functie van de signaal/
ruisverhouding aan de ingang van de ontvanger.
N~iT,,,,n we echter genoegen met dezelfde ' loss-of-Iock'
kans als bij het vierde orde draaggolfterugwinnings
cir'.:uit, dan kan het relatieve vermogen in de
drcaggolfpiloot beperkt blijven tot -12 dB, oftewel
6 ; % van het totale vermogen. Bij deze sterkte van de
rj:oottoon blijft het verlies aan vermogen in het
del' "isignaal beperkt tot minder dan 0.3 dB.
7

veroorzaakt.
extra Tasejitter geeTt bij lage SIN,
van de Pe
orde circuit
De Tasejitter van de teruggewonnen draaggolT is nu
echter weI hager omdat in het vierde orde circuit deze
nog door 4 gedeeld wordt. Om te onderzoeken OT de
hierdoor veroorzaakte degradatie niet te groot is, zal
de invloed van de PLL-TaseTout op de Toutenkans
uitgerekend worden in hOOTdstuk 5.Daar zal blijken dat de Tasejitter voor lage signaal
ruisverhoudingen weI degelijk een extra verslechtering
Bedenk hierbij dat ook het vierde
zodat ook in dat geval niet de ideale P gehaald zale
worden. Een vergelijking is vanwege het niet-lineaire
karakter van het vierde orde circuit niet eenvoudig te
maken. De degradatie van de P is echter zelTs voor eene
relatieve sterkte van de draaggolTpiloot van -12 dB
klein, zodat geconcludeerd kan worden dat het vereen
voudigde draaggolTterugwinningsprincipe inderdaad zinvol
kan zijn.
In het vervolg van dit verslag zal een Mbit/s
BPSK-modem worden beschreven dat gebruikt maakt van het
bovenstaande principe van draaggolTterugwinning.
Voor QPSK verandert aan de draaggolTterugwinning niets,
zodat een BPSK-modem kan worden gebruikt om het systeem
in de praktijk te testen.
8

In fig. 3 is het blokschema van de zender van het
systeem getekend. De PRS-coder zorgt hierbij voor het
verwijderen van de laagfrequent-inhoud van het data
signaal. Op het principe van Partial Response Signalling
en de implementatie van de coder zal uitgebreid worden
ingegaan in hoofdstuk 2.
Daar zal blijken dat de binnenkomende bitstroom door
de coder wordt omgezet in een driewaardig datasignaal.
O~dat de driewaardige symbolen ni~t m~~r informatie
bevatten dan de oorspronkelijke bits, wordt het
gecodeerde signaal weI 'pseudo-ternair' genoemd.
De modulator verschuift het spectrum naar de draag
golffrequentie, waarna een fractie van de draaggolf
wordt opgeteld bij het gemoduleerde signaal. Een band
doorlaatfilter zorgt tenslotte voor de begrenzing van
het uitgezonden spectrum. De modulator met bijbehorende
circuits wordt beschreven in hoofdstuk 5.
PRScodar x BPFf-----tJ
Fig. 3: Blokschema van de zender.
9

In fig. 4 vinden we het blokschema van de ontvanger.
De PLL, fungerend als een afstembaar bandfilter,
regenereert de draaggolf en voert deze toe aan de
coherente demodulator. Na deze demodulator voIgt het
ontvangfilter dat de signaal/ruisverhouding voor de
decoder optimaliseert en tevens zorgt voor eliminatie
van intersymbool-interferentie op de sample-momenten.
Om het datasignaal op deze I5I-vrije momenten te
kunnen bemonsteren is een referentie-kloksignaal nodig.
Dit wordt door het klokterugwinningscircuit uit het
datasignaal gereconstrueerd en toegevoerd aan de
decoder. Omdat het datasignaal driewaardige symbolen
bevat, is verder voor de decode ring nog een drempel
niveau nodig.
Op het ontvangfilter en de circuits voor klokterug
winning en afleiding van het drempelniveau wordt nader
ingegaan in hoofdstuk 4, terwijl de bespreking van de
draaggolfterugwinning en demodulatie plaats vindt in
hoofdstuk 5.
klok- klok,.-l t.etl.lg -
wirll'\inS
d(;~odula.tor
X LPFPRS
'---J
decoder
II
~ BPF~ PLL U y AJ'DC drempelniveau
Fig. 4: Blokschema van de ontvanger.
HI

Het overblijvende blok in fig. 4 is de PRS-decoder.
Eenvoudige symbool-voor-symbool decodering van PRS
blijkt verre van optimaal te zijn, omdat hierbij de
inherente redundantie in het driewaardige signaal niet
wordt ge~xploiteerd. In hoofdstuk 3 wordt een decoder
volgens het principe van Maximum-Likelihood Sequence
Estimation beschreven die het optimum weI dicht
benadert.
In hoofdstuk 6 wordt een aantal meetresultaten
m.b.t. het totclle systeem gepresenteerd, terwijl
hoofdstuk 7 tenslotte enkele conclusies en aanbevelingen
bevat, die ncar aanleiding van deze metingen zijn
opgesteld.
1 'I

HOOFDSTUK 2: PARTIAL RESPONSE SIGNALLING
~ Modified Duobinary Coding en Dicode
Partial Response Signalling, afgekort PRS, is een
klasse van kanaalcoderingsmethoden die vaak gebruikt
wordt voor lijncodering. Het gemeenschappelijk kenmerk
hiervan is de opzettelijke veroorzaking van inter
symbool-interferentie met als doel 'spectral shaping'.
Met PRS is hot mogelijk om het spectrum varl ~en
basisband datasignaal zo om te vormen dat het beter is
aangepast aan het transmissiekanaal.
Zo kunnen er nulpunten in het spectrum aangebracht
worden. Een nulpunt voor f=0 maakt het signaal geschikt
voor lijnverbindingen die geen DC-component kunnen
overdragen. Verder is in combinatie met lineaire
modulatie dus ook transmissie met een draaggolfpiloot
mogelijk, wat in ons geval het beoogde doel is.
Ook een nul punt op de Nyquist-frequentie f=1/2T is
met PRS te verwezenlijken. Dit maakt het mogelijk om
data-transmissie op of boven de Nyquist-snelheid te
plegen. Dit is in de praktijk met een gewoon datasignaal
niet mogelijk; de eisen die aan het ontvangfilter
gesteld moeten worden zijn dan te hoog en het systeem is
(dus) zeer gevoelig voor variaties van de kloksnelheid.
In fig. 5 is het algemene PRS-systeemmodel getekend,
voorgesteld als een tijd-discreet systeem met de reeks
ingangssymbolen {bk
} en de reeks uitgangssymbolen {Yk}'
In het algemeen zouden de bk's continue waarden mogen
aannemen, overeenkomend met algemene PAM. Wij zullen ons
echter beperken tot bk
= ~A. De mogelijke waarden die Ykdan kan aannemen, hangt af van de vorm van PAS die
gebruikt wordt. Algemeen geldt dat het aantal uitgangs
niveau's groter is dan het aantal ingangsniveau's.
12

T T T
Fig. 5
Filter
PR5-systeemmodel met Digitaal Transversaal
Het systeem kan gekarakteriseerd worden door de
samples van de impulsresponsie h(t). Stel er zijn N van
deze samples (f }n
ongelijk aan 0, dan geven we het
systeem weer door zijn zgn. systeempolynoom:
N-1
Fe D)
n=0
waarbij 0 de Delay
operator voorstelt
( 2. 1 )
Welke kandidaat uit de klasse van PRS-systemen is nu
het meest geschikt voor het beoogde doel van datatrans
missie met een draaggolfpiloot?
13

Ref. [3J geeft een overzicht van de verschillende
PRS-systemen met hun eigenschappen. Hieruit kan het
volgende worden geconcludeerd:
-Voor een nulpunt in het spectrum voor f=0 moet 1-0 een
faktor van F(o) zijn.
-Voor een zgn. minimum-bandbreedte systeem met een
nulpunt in het spectrum voor f=1/2T moet 1+0 een faktor
van F(o) zijn.
Hieruit komt het systeem met F( D) - 02
= (1+0)( 1-0)
en de naam 'modified duobinary' (MOB) als meest
geschikte kandidaat naar voren. Het is namelijk het
meest eenvoudige minimum-bandbreedte systeem met een
nulpunt voor f=0. Meer ingewikkelde systemen zoals F(o)
= (1+o)2( 1-0) hebben als nadeel een groter aantell
uitgangsniveau's.
In het vervolg van dit verslag zullen we het echter
toch hebben over een andere vorm van PRS, nml. de
'dicode' met de systeemfunctie F(o) - O. Modified
duobinary codering bestaat namelijk uit 2 ineengevloch
ten dicode-systemen, ~~n voor de even en ~~n voor de
oneven bits. oit zal duidelijk worden uit de volgende
omrekening:
F ( D) 0+0
- 0 + 0 ( - D)
In het geval van modified duobinary valt de reeks
symbolen aan de uitgang van het OFT (zie fig. 5) dus
uiteen in 2 dicode-reeksen die volkomen onafhankelijk
van elkaar zijn. Voor de analyse van het tijddiscrete
MoB-systeem kan dus volstaan worden met de analyse van
het meer primitieve dicode-systeem.
In hoofdstuk 3 zal blijken dat de optimale decoders
14

daar ontwikkeld, aIleen geschikt zijn voor de 'primitieve'
PRS-systemen met F(O) - 0 en F(O) + O. Voor
decodering van MOB zouden daarom 2 parallel werkende
identieke '1-0-decoders' nodig zijn, ~~n voor de even en
~~n voor de oneven bits. Om tijd en materiaal te sparen
is besloten voor de te bouwen modem oak het dicode
systeem te gebruiken. Het bijkomende voordeel van MOB,
namelijk dat het transmissie met de Nyquist-snelheid
mogelijk maakt, is nu echter niet aanwezig.
Lalel zal blijken dat de modem met hel ~icod~
systeem relatief eenvoudig is aan te passen voor MOB.
Alles wat daarvoor nodig is, is die tweede decoder en
een parallel-serie omzetter am de beide uitgangs
bitstromen in ~~n stroom te verenigen.
Om deze reden zal bij de bespreking van spectra en
foutenkansen op beide systemen worden ingegaan.
15

als functie van §.L!'{
In fig. 6 is een coder-decoder combinatie voor F(D)
- 0 getekend. In het tijddiscrete systeem wordt de
ruis in het kanaal gemodelleerd als een reeks van
ruissamples. De naamgeving van de verschillende discrete
signalen in deze figuur zal ook in de rest van het
verslag gebruikt worden.
ruis
T l--'n
k +drempeldel:.ec~or
.-tk AID ,..Jk
coder kanaalJ decoder
Fig. 6 Codec voor PRS met F(D) = 1 - D.
{bk
} is een reeks van ingan~sbits die de even
waarschijnlijke waarden -A en A kunnen aannemen. Met de
codeerregel Yk = bk
- bk
-1
is dan eenvoudi~ te
verifi~ren dat dit leidt tot 3 verschillende waarden
voor Yk
met de volgende kans van optreden:
-2A)
lZl)
= P(yk
1/2
2A) 1/4
De decoder bestaat uit een AID-converter of drempel
detector met drempelwaarden -A en A die de ontvangen
waarde zk = Yk
+ nk
digitaliseert. De resulterende
digitale waarde (-2A, lZl of 2A) is een schatting voor Yk ;
dit wordt aangegeven doo: het gebrui~ van een De
decoder berekent bk
uit b k = Yk + b k - 1 ·
16

We zullen nu de foutenkans Pals functie van dee
afleiden die behaald wordt met bovenstaande codec.
De foutenvoortplanting, die opt:eedt doordat b k - 1gebruikt voor het bepalen van b
k, wordt hierbij
voorlopig verwaarloosd. De gevonden P zal dus eene
ondergrens zijn.
SIN
wordt
Pe
P(Yk
= -2A) .P(nk
> A) +
+ P(Yk
= el).[ P(nk
> A) + P(nk
< -A)]
+ P(Yk
= 2A) .P(nk
< -A)
3/2 P(n" > A)
3/2 Q(A/o1 (2.2)
+
Om dit te kunnen vergelijken met het binaire basis
bandsysteem moeten we afstappen van de modellering als
tijddiscreet systeem. De pulsvorm die gebruikt wordt, is
namelijk voor het relateren van A/~ aan een signaalruis
verhouding van belang. lowel bij gebruik van sinc- als
rechthoekpulsen geldt voor het signaalvermogen:
S2
< b >k ensemble
222P( Yk =2A) . (2A) + P( Y
k=-2A) . ( -2A) + P( Y
k=el) . el
Voor het
Met SIN
ruisvermogen geldt bij witte, thermische ruis:
N = c?2 2= A 12d voIgt nu dus de foutenkans als functie
van de signaalruisverhouding:
Pe
3/2 Q(VS/2N) ( 2.3)
Vergelijk dit met de foutenkans voor binaire basisband-
transmissie:
Pe
Q( \ft7N)
1?
( 2.4)

Het blijkt dat (afgezien van de faktor 3/2), het drie
waardige datasignaal een degradatie van 3 dB tot gevolg
heeft. M.a.w. er is t.o.v. binaire basisbandtransmissie
een 3 dB hogere SIN nodig voor dezelfde P . Oit zeere
grate nadeel is echter niet inherent aan de PAS-
codering, maar moet geweten worden aan de te eenvoudige
manier van decodering. In hoofdstuk 3 zal blijken dat
een beter gekozen decodering de verslechtering van de Pe
vrijwel geheel kan opheffen.
Een ander nadeel van PAS is de al eerder genoemde
voortplanting van fouten in de decoder. Ooordat deze
decoder in feite bestaat uit het discrete equivalent van
een integrator lijkt een fout zich tot in het oneindige
voort te planten. Zo erg is het echter in de meeste
gevallen niet; dit zal met een voorbeeld duidelijk
gemaakt worden. Hiervoor gebruiken we een bijzondere
vorm van toestandsdiagram; de zgn. trellis. (zie ref.
[4)). Een voorbeeld hiervan is getekend in fig. ?
Horizontaal staat uit de (discrete) tijd en verticaal de
verschillende toestanden.
3A
A
-A
£1£~ L 0
j;o 0 0
Fig. 7. Voorbeeld van een decoder-trellis, met
decodeerfout
Stel door de ruis wordt
als Yk = 2A. Als bk~1
gecorrigeerd omdat bk
een verzonden Yk
= 0 ontvangen
A wor9t de fout onmiddellijk
Yk
+ bk
-1
= 3A een niet
18

geoorloofde waarde is. In het geval bk
-1
= -A wordt de
fout niet gecorrigeerd en geeft een foutieve output b kA. De decoder zal nu foutieve bk's blijven afleveren
zolang er geen Yk
= 2A ontvangen wordt, dus zolang er
geen bk=A foutloos overgezonden wordt.
In het geval van random even waarschijnlijke bits als
input voor de encoder betekent dit dat in het algemeen
een reeks van foutieve bits een gemiddeide iengte van 2
zal hebben. Hierbij is wei verondersteld dat er geen
nieuwe fouten optreden vOGrdat de eerste fcut
gecorrigeerd is ~n dat er geen fouten over 2 niveau's
(Yk
= -2A wordt Yk
= 2A of vice versa) optreden.
Deze veronderstellingen zijn redelijk bij niet al te
lage SIN. Overigens hebben deze gebeurtenissen over het
algemeen een gunstige invloed op de P .e
Het effect van de foutenvoortpianting is dus bij
benadering een verhoging van de P met een faktor 2.e
Als remedie tegen deze foutenvoortplanting wordt in het
algemeen vaak precoding toegepast. Hierbij worden de
ingangsbits differentieel 'voorgecodeerd'.
Een codec waarbij deze precoding is gecombineerd met
PP,S, is te zien in fig. 8.
T T
coder decoder
Fig. 8. Codec met precoding in combinatie met PRS
19

Het is eenvoudig na te gaan dat elke reeks van fouten
in deze decoder nu overgaat in 2 afzondelijke fouten, nl.
de eerste en de Iaatste bit van de oorspronkelijke
reeks. Omdat deze reeksen een gemiddelde lengte van 2
hebben bij PRS met F(D) 1 - D en even waarschijnlijke
random ingangsbits geeft precoding in dit geval dus geen
verbetering van de P In een lange reeks van enen ofe
nullen kan een fout zich echter weI ver voortplanten.
Om die reden kan precoding in een praktisch systeem toch
zinvol zijn.
Het voorafgaande geldt ongewijzigd ook voor modified
duobinary codering. Samenvattend kunnen we dus zeggen
dat voor zowel dicode als modified duobinary geldt dat
de foutenkans bij bit-voor-bit detectie de volgende is
Pe,BIT 3. Q( VS/2N) ( 2.5)
2.3. Spectrale vermogensdichtheid ~ het gecodeerde
datasignaal.
In deze paragraaf zal de vermogensdichtheid van
dicode en modified duobinary afgeleid worden.
Hiervoor is het allereerst nodig om de overdrachts
functie van de systemen te berekenen:
F( D}
-- H( f}
- 0
- exp(-jWT)
exp(-jWT/2) .[exp(jWT/2)
2j sin (WT/2) .exp(-jWT/2)
exp(-jWT/2)]
( 2.6)
A.T.sinc(fT)
Als pulsvorm gebruiken we een polaire NRZ-puls met
hoogte A:
b(t} = A.TT (t/T) ~ B(f)
20
( 2.7)

Het spectrum van een uitgangspuls van de encoder is dus:
Y( f) H( f) . B( f)
2 j A . sin ( 'f'I"f T) . sin c ( f T) ( 2.8)
Hierbij is de faktor exp(-jWT/2) die aIleen een
tijdvertraging van T/2 representeert, weggelaten.
Voor de berekening van de spectrale vermogens
dichtheid G (f) gaan we uit van gebalanceerde binairey
random data met P(A) ~ PC-A) = 1/2, GIs ingangssignaei
voor de coder.
Onder deze vGorwaarden geldt:
G (f)Y
1/2T 12Y(f)12
(zie ref.[2]
= 8 A 2 T . sin 2 ( -rlf T) . sin c 2 ( f T)
p. 80)
( 2.9)
De spectrale vermogensdichtheid is getekend in fig. 9
os
iT
Fig. 9. 5pectrale vermogensdichtheid van dicode met
rechthoekpulsen.
21

Voor modified duobinary zijn het spectrum van een
ge!soleerde puIs en de spectrale vermogensdichtheid als
voIgt:
Y( f)
G (f)Y
2 j A . sin (2f'1'f T) . sin c( f T) (2. HI)
(2.11)
Dit spectrum lijkt sterk op dat van de dicode, maar het
aantal nulpl1ntpn j s verdubbeld. Het (extra) nul punt vonr
de Nyquist-frequentie f=1/2T maakt transmissie met de
Nyquistsnelheid praktisch mogelijk. De spectrale inhoud
van het signaal rond de Nyquist-frequentie is immers
zeer laag, zodat aan de fase- en amplitude-karakteris
tiek van het ontvangfilter rond deze frequentie geen
hoge eisen hoeven te worden gesteld.
22

is
In
.~.. 4. lnl tdemelltatie vall de coder
In ~ig. A4 van Appendix 3 is het schema van de coder
getekend. De coder heeft behalve het datasignaal ook een
kloksignaal nodig, omdat een over ~~n kloktijd
vertraagde versie van het datasignaal gebruikt wordt
voor de 1-0 codering.
Voor het genereren van het verschilsignaal bk
- b k - 1gebruik gemaakt van een TTL tri-state poort.
dede 3 toestand heeft deze pG~rt een hoogohmige
uitgang. Door een met de uitgang verbonden
spanningsdeler wordt nu het uitgangsniveau in deze
toestand precies tussen het "0" en het "1" niveau
gebracht. Op deze manier is een driewaardig data-signaal
verkregen. Omdat dit signaal geen laagfrequentinhoud
heeft, kan de DC-component eenvoudig met een condensator
geblokkeerd worden. Op deze manier onstaat een data-
signaal met de niveau's -1, 0 en 1.
De encoder is zeer eenvoudig te veranderen in een
coder voor modified duobinary door simpelweg de over 2
kloktijden vertraagde versie van het datasignaal te
gebruiken. Ook differenti~le codering (precoding) is
m.b.v. de aanwezige exclusive-or poorten eenvoudig aan
te brengen.
23

HOOFOSTUK 3: OPTIMALE DECODERING VAN PRS
3.1. Maximum-Likelihood Sequence Estimation
Zoals reeds gezegd is bit-voor-bit detectie van PAS
geen optimale wijze van decodering. Dit hooTdstuk zal
gewijd zijn aan een decoderingsmethode dJ.e weI optimaal
is, nml. Maximum-Likelihood Sequence Estimation (MLSE).
Door Forney is in reT. [4] aTgeleid dat MLSE een goede
methode is om het eTTect van lSI bij pulsmodulatie in
het algemeen tegen te gaan. Omdat PRS beschouwd kan
worden als een opzettelijk aangebrachte vorm van lSI,
ligt het voor de hand ook hier deze methode toe te
passen.
De MLSE-decoder kiest het pad door de trellis, dat
gegeven de ontvangen reeks van waarden, de grootste kans
van optreden heeTt. Toegepast op PAS, kunnen we zeggen
dat de decoder kiest voor die reeks b~-bL_1 waarvoor de
conditionele waarschijnlijkheid P(z~ - ZL_,I b~ - b L_,)
maximaal is (zie Tig. 6 voor de betekenis van b k en zk)
In de praktijk zal niet met deze waarschijnlijkheid zeIT
gerekend worden, maar met een uitdrukking die hiervan
aTgeleid is. Deze maat voor de waarschijnlijkheid wordt
weI 'metric' genoemd. Voor elk van de mogelijke paden
die de coder doorlopen kan hebben, wordt dus de metric
bepaald, waarna het pad met de maximale metric gekozen
wordt.
In reT. [4] en [S] is aTgeleid dat de Toutenkans bij
MLSE-decodering van een pseudo-ternair PAS-signaalvoor
SiN » 1 en rekening houdend met de invloed van fouten
voortplanting benaderd kan worden door:
P ML r ~ = 4. Q(\ /SiN)e, 61:. VC)I'~
24
( 3. 1)

Dit is nog slechts een Taktor 4 slechter dan
de Toutenkans in het geval van binaire transmissie; de
S/N-degradatie van 3 dB in het geval van bit-voor-bit
decodering treedt bij MLSE niet op.
Het grootste probleem van MLSE is de snel te groot
wordende complexiteit van de decode ring en de grote
decodeervertraging. Concreet zijn er 3 eigenschappen die
een praktische implementatie van het MLSE-algoritme in
de weg staan:
1. Om de waarschijnlijkheid P(z0 - zL_" b 0 - b L_,) ven
een pad te berekenen moet theoretisch helemaal terug
gerekend worden naar het begin van een reeks.
2. LNa L ontvangen waarden moet de decoder 2 paden in
beschouwing nemen als kandidaat voor het meest waar
schijnlijke pad.
3. Voor elk van de 2L
mogelijke paden moet het gehele
pad b0
- bL
-1
met de bijbehorende maat voor de waar
schijnlijkheid worden opgeslagen.
In de nu volgende paragraaT worden deze 3 bezwaren
aangepakt om een praktisch algoritme op basis ven MLSE
mogelijk te maken.
25

3.2. Beschri jving van 2 praktische algoritmen
3.2.1. Het Ferguson-algoritme
In ref. [6] beschrijft Ferguson een praktisch
algoritme voor de decodering van PAS met F(D) = , - D.
Hierbij zijn de volgende vereenvoudigingen op het
algemene MLSE-algoritme aangebracht:
Ad 1. Onder de veronderstelling dat de ruissamples in
het ~Gnaal onafhankelijk zijn, kUGGc~ d6 metrics
recursief berekend worden. Dan geldt namelijk:
L-1
P( zeJ - zL-1 1 beJ - b L _,) = TT P( zk l bk_,b k )
k=eJ
( 3.2)
De afzonderlijke faktoren P( zkl bk_,b k ) kunnen 4
verschillende waarden aannemen. Voor normaal verdeelde
ruissamples met standaarddeviatie ~ zijn deze waarden in
tabel verzameld. Om tot de metrics te komen wordt
allereerst de logaritme genomen. Hierdoor gaat het
bovenstaande produkt over in een som. Na weglating van
de gemeenschappelijke term -zk2
- In ~en deling
door 2A/d2
worden de bijdragen tot de metrics zoals te
zien in de Tabel 1.
De metrics mk
ten tijde t=kT kunnen nu dus berekend
worden door deze uitdrukkingen bij de al berekende
metrics mk
-1
op te tellen. Het rekenwerk dat per pad
verricht moet worden blijft nu dus beperkt tot een
enkele optelling.
26

Tabel 1. Mogelijke uitdrukkingen voor PC zf.,.1 b k _ 1 bf.,.)
bk
_1
bk P(Zk b
k_
1b
k) metric
bijdrage
1-z 2/2(J2
-A,-A k0
V21fcre
2-A, A
-(z -2A)1 -k~
e 2 7'k - AV21T~'
2A,-A
-(zk+2A )_1_ e- 262 zk + AV2Tr(J"
A, A 1 -zk2/ 2(J20-- e
V2TfCf
Ad 2. De tweede vereenvoudiging van het a120ritme
betreft het aantal paden dat in beschouwing 2enomen moet
worden. Oat zijn er namelijk voor PRS met F(D) = 1 - D
steeds precies 2: een pad eindigend in bk=A met de
metric mk
( 1) en een pad eindigend in bk=-A met de metric
mk(0). Oit is eenvoudig te bewijzen m.b.v. volledige
inductie; voor k=1 is het vanzelfsprekend en onder de
veronderstelling dat het geldt voor k-1, is eenvoudig te
bewijzen dat het ook zal gelden voor k.
Ad 3. Het laatste bezwaar van MLSE was dat de (nu 2)
overblijvende paden vanaf hun begin opgeslagen moeten
worden. In de meeste gevallen hebben deze 2 paden echter
een identiek starttraject. De bits hiervan liggen dus
eenduidig vast, zodat ze niet langer opgeslagen hoeven
te worden.
27

•
mk
_1
(1 )
I3
o 1
a. mogelij.-::e paden naar knooppunt "1" resp. "0"
o
•
III •
o
IV 1" "." ",><" " 0.",. .....
b. mogelijke combinaties van gekozen paden
( I = +k~~:i.G~ ten tijde k-1, II ;:: -MERGE )
Fig. 10. Decoder-trellis ten tijde k
In fig. 10a is de situatie in de decoder ten tijde k
getekend. Op basis van de metrics en de ontvangen waarde
van zk kan onmiddellijk een keuze gemaakt worden tussen
pad 1 en 2 en tussen pad 3 en 4.
Afhankelijk van deze keuze worden oak de nieuwe metrics
mk(1) en m
k(0) berekend:
( 3.3)
Er zijn na deze beslissing weer 2 overblijvende
paden. De 4 verschillende conTiguraties zijn aangegeven
in fig. 10b. De mogelijkheden I en II laten een Tusie
(merge) van paden zien. Het meest waarschijnlijke pad
tim k-1 ligt nu dus vast. In configuratie III blijven de
28

2 paden parallel lopen en moeten dus beide helemaal
opgeslagen blijven. Het is namelijk nog niet te zeggen
welk pad later het meest waarschijnlijke zal blijken te
zijn.
De paden lopen ook werkelijk parallel in die zin dat het
ene pad uit nullen en het andere pad uit enen bestaat.
In configuratie ~ kruisen de paden. Deze situatie is
echter niet mogelijk; in dat geval zou namelijk moeten
gelden:
7Z - >m (1)k k-1
< m (1) - z - 1k - 1 k
en dit is natuurlijk onmogelijk.
Omdat er in het geval van PRS met F(D) - D maar 2
metrics zijn, is er nog een laatste vereenvoudiging
mogelijk. In plaats van de 2 metrics kunnen we namelijk
volstaan met het verschil ertussen:
De formule voor de berekening van ~k wordt nu:
zk + A als Ll k-1 - zk > A (+MERGE)
L1 k - 1 als -A < Ll k-1- z < A
k( 3.4)
zk - A als L1k
-1
- zk < -A (-MERGE)
In fig. 11a is een blokschema van het systeem
getekend, waarmee de opslag en berekening van ~ k
gerealiseerd kan worden.
29

+
T .J
+
~ k-l
k-l
M+k
SR1LOAD S{,N ( AIc-l )
• e ••••• I--
In OU~ In OlAl:.
~
M- MUX -I<~ A
SR.'l. .lOlAt In LOAD OLAt in
....... I--
o"
2..
:-:....; .
Fig. 11. Blokschema van de Ferguson-decoder.
a. Circuit voor de berekening van de metric.
b. Schuifregisters voor opslag van de paden.
)0
+De 3 (digitale) uitgangssignalen M~ en Mk en
SGN( L1 k-1) worden gebruikt als besturing voor de schuif'
registers van f'ig. 11b. In deze schuif'registers worden de
2 paden opgeslagen, die kandidaat zijn voor het meest
waarschijnlijke pad. Daarvoor worden ze gevoed met resp.
nullen en enen, die elke slag van het algoritme 1 plaats+
naar rechts doorgeschoven worden. Bij een +MERGE eMk =1)
wordt voor de schuif'operatie de inhoud van SR2 in SR1
gekopieerd. SR2 bevat in dat geval namelijk het meest
waarschijnlijke ~ad tot en met k-1.
Analoog wordt in het geval van een -MERGE de inhoud van
SR1 in SR2 gekopieerd. Figuur 12 geef't 2 momentopnames
van de inhoud van de 2 schuif'registers.
SR1
SR1=SR2
SR2 1 1 1
011110010101 11101111001010
a. Situatie voor de MERGE b. Na +MERGE en shif't
Fig. 12. Voorbeeld van mogelijke buf'f'erinhoud
Welk register naar de uitgang doorgeschakeld wordt,
hangt af' van sgn( Ll k-1). Zoals te zien in f'ig. 12, is
deze beslissing echter aIleen van belang als de laatste
bits van SR1 en SR2 verschillen.
In dat geval bevat SR1 aIleen nullen en SR2 aIleen
enen. Het algoritme heef't dan in f'eite gef'aald, maar de
schade kan beperkt worden door m.b.v. de verschilmetric
~ k-1 het meest waarschijnlijke bit te bepalen.
De betref'f'ende bits worden in f'eite door bit-voor-bit
detectie bepaald.
De gebeurtenis dat een bit uit het schuif'register
wordt geschoven voordat zijn waarde vastligt, wordt
'buf'f'er overf'low' genoemd. De invloed hiervan op de
f'outenkans wordt besproken in paragraaf' 3.3.
31

3.2.1. Het ~orney-algoritme
In deze paragraaf wordt een eenvoudig foutencorri
gerend algoritme beschreven dat door Forney in ref. [4J
gepubliceerd werd. Het zal vergeleken worden met het
algoritme uit de vorige paragraaf am op basis van
complexiteit en prestaties een keuze tussen beide
algoritmen te kunnen maken.
Uit de decoder-trellis van fig. ? zagen we al dat
foutendetectie in t:!eli f-'l-iG-decoder zeer eenvoudig is; al!:>
er een waarde bk
= ~3A wordt gedecodeerd, moet er een
fout zijn opgetreden. Het Forney-algoritme bepaalt nu
m.b.v. zk en Yk de meest waarschijnlijke plaats van de
fout en corrigeert de betreffende bit. Een blokschema
van de
figuur
decoder vol gens dit principe is getekend in
13.
T
+~)
SR
AID + LIMIT (-~) ....ER. 1\
2.k" 1\ -&k-L
-Gk,l:.e.st ..tk
+ C.ORREC.TIEC.II"C.L\IT
Fig. 13. Decoder met foutencorrectie.
32

Een essentieel verschil met de vorige paragraaf is
dat het daar beschreven algoritme een complete decoder
vormt, terwijl het Forney-algoritme alleen fouten
corrigeert. Het onderste gedeelte van fig. 13 vormt zo
een soort 'hulpmotor' die de prestaties van de
conventionele decoder in de bovenste helft verbetert.
Het getekende correctiecircuit heeft 2 ingangs
signalen: bk,test waarmee een eventuele fout
gedetecteerd wordt en nk
= zk - Yk om de fout te
localiseren. nk
is a.h.w. een schatting voor de waarde
van het ruissample nk
. Het correctiecircuit onthoudt de
grootste positieve en de de grootste negatieve waarde
van nk
en de plaats van optreden van deze maxima. Als nu
een positieve fout (Yk
> Yk) optreedt, wordt de bit met
de grootste negatieve waarde van nk
gecorrigeerd. Bij
een negatieve fout wordt analoog het bit met de grootste
positieve waarde van nk
gecorrigeerd. In fig. 14 is het
correctiecircuit voor negatieve fouten getekend; het
gedeelte voor positieve fouten is geheel analoog.
SR
"bk,l:.u~
T
1\
l.k
.1·
=Aof 3A
1\
-tk_1
Fig. 14. Correct ie-circuit volgens het Forney-algoritme
33

het
De plaats van het bit met de grootste positieve waarde
van nk
wordt bijgehouden in een schaduwregister waar bij
elke slag van het algoritme een '1' in geschoven wordt.
Als nu een negatieve fout gedetecteerd wordt met het
optreden van bk,test = -3A, dan worden die bits in het
decoder-register gecomplementeerd, waarvoor het schaduw
register enen bevat. Daarna kunnen aIle bits van het
schaduwregister 0 gemaakt worden. Dit Iaatste mag oak
gebeuren als bk,test = A of 3A; in dat geval is
zeker dat er g~~n negatieve f(1ut is opgetreden.
AIhoewel het Forney-algoritme wat concept betreft
eenvoudiger is dan het Ferguson-algoritme, voIgt uit
de biokschema's van fig. 11 en 14, dat het Iaatstge
noemde algoritme eenvoudiger ge!mplementeerd kan worden.
Bij geIijke prestaties zal het Ferguson-algoritme dus de
voorkeur hebben.
3.3. De invloed van buffer overflow.
In de vorige paragraaf werd al gesproken over het
fenomeen 'buffer overflow'. Voor het Ferguson-algoritme
is dit de gebeurtenis dat een bit uit het schuifregister
wordt geschoven, voordat zijn waarde bepaald is. In het
Forney-algoritme spreken we over buffer overflow als een
foutief bit uit het schuifregister wordt geschoven
voordat de fout gedetecteerd kan worden.
In beide gevallen worden de 'overiopende' bits
effectief volgens 'bit-voor-bit' detectie bepaald.
Noemen we de kans op buffer overflow bij een
registerlengte L Pbo(L), dan geldt voor de foutenkans:
P (L)e
( 3.5)
34

De registerlengte zal altijd zo gekozen worden, dat
Pbo(L) « 1. In eerste orde benadering kan verder
Pe,L=~ benaderd worden met Pe,MLSE' Hiermee gRat (3.5)
over in:
P (L)e
Pe,BIT
Pe,MLSE (1 + Pbo(L) . __
Pe,MLSE
( 3.6)
Het quoti~nt in (3.6) neemt exponentieel toe met de
signaal-ruisverhouding, zodat ook de relatieve invloed
van de kans op buffer overflow groter is bij hogere
SIN. Als (willekeurige) eis zullen we nemen dat de
buffer overflow bij een P = 1E-6 ( dus S/N=14dBe,MLSE
de foutenkans met niet meer dan 1~% mag verhogen. Om
deze eis te vertalen in een eis voor de bufferlengte,
moet Pbo(L) voor de beide algoritmen uitgerekend worden.
Voor het Forney-algoritme geldt dat een fout niet
gedetecteerd wordt, zolang er door de decoder nullen
worden ontvangen (zie fig. 9). P(Yk
= ~) = 1/2, dus de
kans dat een fout na L bits nog niet is gedetecteerd,
is:
P ( L)bo,Forney
-L2 (3./1)
In het geval van het Ferguson-algoritme is de
berekening minder eenvoudig. Buffer overflow treedt
hierin op als 2 opeenvolgende 'merges' L of meer bits na
elkaar plaatsvinden.
Stel de twee merges vinden plaats op t=k en t=k' met
s=k'-k. Voor de kansverdeling van 5 is door Kobayashi in
ref.['7] afgeleid:
P( 5) 2- 5 (2/5 - 11(5+1)]
Dit geldt echter aIleen voor hoge signaal-
ruisverhoudingen.
35

Hieruit voigt:
P C L)bo,Ferguson
00
L PC 5)
s=L
Qo
La 2- 5 .[2/5 - 1/(5+1)]
s=L
( 3.8)
Als we deze uitdruKkin£en invullen in (3.6) voigt dat
voor het Forney-algoritme aan de gestelde eis wordt
voldaan voor L > 12, terwijl in het Ferguson-algoritme
met een registerlengte van L > 1~ volstaan kan worden.
Ook in dit opzicht is het laatstgenoemde algoritme dus
superieur vergeleken met het eerstgenoemde.
Hierbij moet weI aangetekend worden dat de uitdrukking
voor buffer overflow bij het Ferguson-algoritme een
benadering is die aIleen geldt in het geval van
Gaussische ruis en hoge signaal/ruisverhouding, terwijl
de berekende kans op buffer overflow bij het Forney
algoritme exact is en algemeen geldig bij random, even
waarschijnlijke bits. We hebben echter gezien dat buffer
overflow aIleen bij hoge SIN van invloed is op de uit
eindelijke foutenkans, terwijl we steeds uitgegaan zijn
van Gaussische ruis. De invloed van buffer overflow bij
het Ferguson-algoritme zal dus in de praktijk weinig
afwijken van het op grond van de gebruikte benadering
verwachte effect.
36

3.4. Simulatie van de praktische algoritmen.
Om de prestaties van beide decoderings-algoritmen te
testen, is de combinatie van coder,kanaal en decoder
gesimuleerd op een computer. De coder en de MLSE-decoder
zijn in het voorafgaande gemodelleerd als tijddiscrete
systemen, die een aantal bewerkingen zoals vergelijken,
schuiven, optellen, etc. uitvoeren op discrete en
continue 'variabelen'. Als zodanig zijn ze eenvoudig in
een computerprogramma om te zetten.
De random ingangsbits voor de encoder en de normaal
verdeelde ruissamples worden gegenereerd door routines
uit een programma-bibliotheek met numerieke algoritmen.
Deze routines staan bekend onder de verzamelnaam 'random
number generators'.
In totaal zijn er 6 verschillende programma's
geschreven waarmee de volgende coder-decoder
configuraties gesimuleerd kunnen worden:
1. De codec met bit-voor-bit detectie en precoding.
Dit programma is gebruikt als basis voor de andere
programma's en diende tevens om de random number
generators te controleren (programmanaam: DICODE)
2. Codec met Forney-algoritme en precoding. (FORNEY1)
3. Idem zonder precoding. (FORNEY2)
4. Codec met Ferguson-algoritme en precoding. (FERGUS01)
5. Idem zonder precoding. (FERGUS02)
6. Als 4 met instelbare begrenzing en quantisering van
L1 k' (FERGUS03)
In elk programma is het mogelijk om het aantal te
simuleren bits, de lengte van het schuifregister, de
standaarddeviatie d van de ruis en een startwaarde'voor
de random number generators te specificeren.
Het gecodeerde datasignaal kan de waarden -2,0 en 2
a ann e men, d u s 5 / N = 2 / d 2 (z i epa g. 17)
37

De startwaarde maa~t het mogelijk een reproduceerbare
reeKs ingangsbits en ruiswaarden te genereren, zodat de
verschillende coder-decoder configuraties onder exact
dezelfde externe condities getest kunnen worden.
Het totaal aantal te simuleren bits wordt verdeeld in
een aantal blokken of runs. Na elke run wordt het aantal
fouten en de resulterende BER berekend. Deze tussen-
resultaten kunnen gebruikt worden am de statistische
betrouwbaarheid van de uiteindelijk berekende SER te
schatten.
Als laa:ste .1.'; er de mogelijt<.heid een zogerldulf,de
'trace-mode' in te stellen. Hierbij warden tijdens elke
slag van de codec de belangrijkste variabelen Coftewel
signalen) zichtbaar gemaakt. Dit kan bijvoorbeeld nuttig
zijn am te zien welke waarden de analoge signalen aan
nemen of am te analyseren onder welke omstandigheden het
algoritme faalt.
De meer specifieke details van de simulatie
programma's zijn verzameld in Appendix 3, samen met de
stroomschema's en de tekst van de broncode.
Om de random number generators op hun nauwkeurigheid
te kunnen schatten werd allereerst de bit-voor-bit
decoder gesimuleerd voor een aantal ruisniveau's.
De resulterende BER werd vergeleken met de theoretische
foutenkans Pe
3/2.QC\!5/2N). Hierbij moet weI rekening
gehouden worden met het effect van de simulatiegrootte
Chet aantal gesimuleerde bits). Hoe meer fouten er
gedetecteerd zijn, des te betrouwbaarder is de
uiteindelijk berekende BER. De standaarddeviatie van
deze BER kan geschat worden uit de BER's van de
individuele runs die door de simulatieprogramma's
berekend worden.
Uit de resultaten blijkt dat de random number
generators zo nauwkeurig zijn dat in de BER van de bit
voor-bit decoaer geen enkele afwijking van de
38

theoretische P te detecteren viel.e
Voorbeeld:
d = 0.7 ---+
Simulatiegrootte:100 000 bits ---+
pe
SER
0. 1148
0. 1147
Na dit voorbereidende werk is een aantal simulatie's
uitgevoerd met de Ferguson- en Forney-decoders. Hierbij
zijn 4 zaken onder de loep genomen:
1. het e~~~ct v~n precoding
2. de invloed van de bufferlengte
3. het effect van begrenzing en quantisering van de
analoge waarde(n) die in de decoders berekend en
opgeslagen moeten worden.
4. het verschil in prestatie tussen het Forney- en het
Ferguson-algoritme.
Ad 1. Om het effect van precoding te evalueren zijn de
betreffende programma's voor een aantal ruiswaarden
uitgevoerd. In Tabel 2 zijn de resultaten voor d = 0.4
en een bufferlengte van 8 verzameld.
Tabel 2: het effect van precoding op de SER
cf '" 0.4 ; bufferlengte 8 bits)
zonder precoding
met precoding
FERGUSON
7.9 E-4
7.8 E-4
FORNEY
9.0 E-4
8.5 E-4
Hieruit zien we dat precoding een klein positief
effect heeft, dat echter nauwelijks significant is.
Voor een praktisch systeem is precoding zeker aan te
39

bevelen opdat ook bij lange reeksen nullen of enen geen
foutenvoortplanting zal optreden. Wat betreft de BER
zijn beide varianten echter vrijwel gelijkwaardig.
Ad 2. Door bij een vaste d de bufferlengte L te vari~ren
is het effect hiervan op de BER bekeken. De resultaten
van de uitgevoerde simulaties zijn verzameld in Tabel 3.
Tabel 3: de invloed van de bufferlengte L op de BEA
d' = 0.4; met precoding)
L=4 L=6 L=8 L=12
Ferguson 1 .5 E-3 9.6 E-3 ?8 E-4 ?2 E-4
Forney , .6 E-3 , .0 E-3 8.4 E-4 ?9 E-4
Deze resultaten zijn redelijk in overeenstemming met
formule (3.6). We zien duidelijk dat bij kleine buffer
lengten de beide algoritmen ongeveer gelijkwaardig zijn.
Voor grotere L wordt het verschil in het voordeel van
het Ferguson-algoritme grater.
Ad 3. Het effect van begrenzing en quantisering van bv.
de variabele ~ in het Ferguson-algoritme is natuurlijk
van belang als voor een geheel digitale implementatie
van de Ferguson-decoder gekozen zou worden.
Begrenzing van ~ treedt echter oak in een analoge
implementatie op, terwijl het aantal quantiserings
niveau's een maat is voor de nauwkeurigheid. Oak voor
een analoge implementatie is het effect van de
begrenzing en quantisering van ~ dus van belang.
In Tabel 4 is een aantal simulatieresultaten veer de
Ferguson-decoder verzameld. Ter vergelijking: zender
begrenzing en quantisatie van Ll en met dezelfde 0"" en
40

bufferlengte is de BER ongeveer 8 E-4.
Het blijKt dat ~ zonder meer tot het interval [-2,2J
begrensd kan worden; uitbreiding tot [-3,3J leverde in
~~n geval zelfs een hogere BER op. Bedenk hierbij dat de
ingangspulsen van de decoder bij afwezigheid van ruis de
niveau's -2, eJ en 2 hebben, terwijl Ll in dat ideale
geval de waarden -1 en kan aannemen.
Bij 64 quantisatieniveau's treedt al meer dan een
verdubbeling van de BER op. Om de degradatie door
quantisatieruis te bpperk~n is het dus wenselijk om 28
256 quantisatieniveau's te gebruiken, waarvoor dus een 8
bits A/O-omzetter nodig is.
Tabel 4: het effect van begrenzing en quantisering van
L1 op de BER. r5 = eJ.4; bufferlengte 8 bits)
L1 begrensd Aantal quantisatieniveau's
tot [ 32 64 256
[-2,2J 3.5 E-3 2.2 E-3 1 .2 E-3
[ - 3, 3J 3.7 E-3 2.2 E-3 1 .2 E-3
Ad 4. Om de prestaties van de be ide algoritmen te
vergelijKen, werd een groter aantal simulaties
uitgevoerd, waarbij een bufferlengte van 12 bits werd
aangehouden. Hiervoor werd gekozen met het oog op de
latere implementatie waarbij de schuifregisters uit ie's
met 4 bits registers zullen worden samengesteld. Er is
gekozen voor de decoders zonder precoding en de signaal
ruisverhouding werd gevarieerd van 5.eJ tot 12.eJ dB. Voor
hogere signaal-ruisverhoudingen was een simulatie door
het geringe aantal fouten dat dan gemaakt zou worden,
niet meer zinvol en te tijdrovend. Voor een SIN van 12
dB bleeK het al nodig om 2 miljoen bits te simuleren om
41
E-6) zal de bufferlengte
een nauwfeurigheid van 20 % in de SER te berei~en.
De resultaten van de simulaties zijn verzameld in
Appendix 2. Deze resultaten stemmen goed overeen met de
benadel'ing Pe,MLSE van (3.1) Deze benadering was echter
alleen geldig voor hoge SIN. Voor lage SIN blijkt de SER
vooral bij de Ferguson-decoder lager te zijn dan
Pe,MLSE·
Zoals verwacht heeft de bufferlengte geen nadelige
invloed op de SER voor de signaal-ruisverhoudingen
waarvoor de decoders gesimuleerd zijn. Pas voor veel
lagere SER's (in de orde van
een rol gaan spelen.
Samenvattend kunnen we zeggen dat beide decoders goed
voldoen, waarbij de Ferguson-decoder licht in het
voordeel is. Omdat deze laatste ook het eenvoudigst te
implementeren is, is de keuze niet moe~ijk.
Als bufferlengte voor de Ferguson-decoder zal L=12
ge~ozen worden, d.w.z. de twee ~andidaat-reeksen voor
het meest waarschijnlijke pad zullen in 12 bits schuif
registers opgeslagen worden.
3.5. ~ementatie van de Ferguson-decoder
In deze paragraaf zal de gebouwde Mbit/s Ferguson-
decoder worden bespro~en. Hierbij wordt uitgegaan van
het blokschema van figuur 7.
In Appendix 3.5 is het volledige schema van de
gebouwde decoder geplaatst, samen met het timing
diagr~m. Om pra~tische redenen is ook het sample-and-
hold-circuit dat aan de decoder voorafgaat, in deze
appendi~ opgenomen.
Zoals te zien in fig. A16 is het circuit veer de
berekening van de verschilmetric ~, analoog uitgevoerd.
De op- en aftre~scha~elingen zijn daarbij uitgevoerd met
42

IJreedbandige en nauwkeurige operationele versterkers.
De meest kritische onderdelen van de analoge implemen
tatie zijn de analoge schakelaars. 52 en 53 vormen samen
met condensator CH
sen 5/H-circuit met 2 inganeen.
De stand van de schakelaars bepaalt o~ zk + A, zk - A
o~ L1 k-1 de nieuwe metric ~ k wordt. Deze schakelaars
moeten in een ~raktie van de bittijd (1 IJs) open- en
dichtgestuurd kunnen worden en mogen bij het openen en
sluiten niet een te grote hoeveelheid lading op de hold
condensator verplaatsc~.
Er moeten dus zeer hoge eisen worden gesteld aan deze
schakelaars. Er is echter toch gekozen voor een analoge
implementatie omdat voor de 5/H-schakeling van fig. A1S,
die voora~gaat aan de decoder, een schakelaar van nog
betere kwaliteit nodig is. In een smalbandig communi
catie-systeem is het sample-moment namelijk erg kri
tisch; een te lange o~ te late sample-puIs veroorzaakt
snel intersymbool-inter~erentie.De genoemde S/H-scha
keling zou ook nodig zijn in een digitale implementatie
en zou daar voora~gaan aan de A/o-omzetter.
Het circuit van ~ig. A16 is dus uitgevoerd als een
analoge geklokte schakeling; aIle acties worden gesyn-
chroniseerd met het aan de decoder toegevoerde MHz
kloksignaal. Hoe deze synchronisatie verloopt is te zien
in het timing-diagram van ~ig. A18.
De beschrijving van het digitale gedeelte van de
Ferguson-decoder is te vinden in ~ig. A17. De schuif
registers voor de opslag van de twee kandidaten voor het
meest waarschijnlijke pad, zijn samengesteld uit 3
secties van elk 4 bit.
8ij elke klokpuls worden de bits in de registers
plaats naar rechts opgeschoven. Vindt er een MERGE
plaats, dan wordt er een extra klokpuls gegenereerd
tussen 2 reguliere klokpulsen in. Het betre~~ende
register wordt omgeschakeld van 'schuiven' naar
'parallel laden', waarna op het moment van de extra
43

l,'f pUiS ae inhoud van het andere register wordt
g e k 0 pie e. r ,j .
De decoder is gebouwd in een versie zonder precoding.
Deze differentigle codering is echter eenvoudig toe te
voegen met de ongebruikte flipflop en exclusive-or poort
die op de module aanwezig zijn. Met de operationele
versterker en analoge schakelaar die ook nog extra
aanwezig zijn, is het verder nog mogelijk een Integrate
And-Dump circuit aan te brengen tussen de S/H en de
Ferguson-decoder, Dit is optimaal in het geval van
rechthoekpulsen, dus als de decoder deel uit maakt van
een breedbandig communicatie-systeem.
3.6. Metingen en conclusies.
Met de meetopstelling van figuur 15 is de gebouwde
MLSE-decoder aan een aantal 8ER-metingen onderworpen.
Hierbij zijn de externe omstandigheden op een aantal
punten ge!dealiseerd, te weten:
a. De decoder is perfect gesynchroniseerd met de coder
doordat de klokken zijn doorverbonden. Het effect van
niet ideale klokterugwinning zal dus niet in de 8ER
zijn terug te vinden.
b. Het drempelniveau in de decoder is op het oog
ingesteld. In een praktisch systeem zal de drempel
waarde uit het signaal zelf afgeleid worden.
c. Het niveau van de ingangspulsen van de decoder is zo
gunstig mogelijk gekozen als een compromis tussen de
eindige snelheid en de eindige nauwkeurigheid van de
decoder. In de praktijk zal een AGe-circuit deze taak
moeten verrichten en het resultaat zal niet altijd de
ideale pulsamplitude opleveren.
d. Het uitgAngssignaal van de PRS-coder is niet
gefilterd, zodat aan het S/H-circuit rechthoekpulsen
44

worden toegevoerd. Het effect van een niet-ideaal
sample-moment is dus niet aanwezig. Dit hangt
natuurlijk samen met het beschrevene onder a. Er is
overigens geen Integrate-and-Dump circuit toegepast,
hoewel dit optimaal zou zijn in dit geval.
e. De sample-tijd is niet oneindig kort, zodat enige
middeling van ruis wordt veroorzaakt.
clock1. MHz.
DATAGEN.
PRS -I---~ +}--~c.odet
HLS£ 1------41 e:RRO~dec.odet OETe:C.
I<.UI5 RMS(;E~. mete ..
Data generator HP3760A
Error detector HP3761A
Pulsgenerator DATAPULS 101
Ruisgenerator GR1383
RMS Voltmeter HP3400A
Fig. 15. Meetopstelling voor SER-metingen met de decoder
De datagenerator van fig. 15 produceert pseudo
random binaire datareeksen (PRSS) met een instelbare
herhalingstijd. Het is natuurlijk essentieel dat deze
herhalingstijd (in aantal bits) langer is dan de buffer
lengte van de MLSE-decoder. Sij de metingen werd een
herhalingstijd van 210
- 1 bits ingesteld, wat
ruimschoots voldoende is. De data generator en de error
45

detector kunnen op dezelfde datareeks ingesteld worden;
de error detector synchroniseert dan automatisch op de
ontvangen datareeks. Met de vert raging die in de MLSE
decoder optreedt, hoeft bij de metingen zodoende geen
rekening gehouden te worden.
De signaal/ruisverhouding is bepaald door steeds de
uitgangsspanning van het S/H-circuit met en zonder data
te meten met een RMS-Voltmeter.
De resultaten van de uitgevoerde metingen zijn te
vinden in Appendix 2; de uit rl p mectresultaten
geconstrueerde grafiek is ook getekend in figuur 16.
.)10
\
\;\
Pe., blnal r \
= CQ (VS/N ') \
\
\
SIN I" ~B
Fig. 16. BE8 als functie van de signaal/ruisverhouding
aan de ingang van de MLSE-decoder.
46

Uit de meetresultaten kunnen we concluderen dat de
decoder vrij dicht bij de BER komt, die uit de
simulaties met de Ferguson-decoder is bepaaid.
Het verschil wordt groter voor stijgende signaal/
ruisverhouding. Voor SiN = 15 dB is de BER verdubbeld
t .0. v .
DitPe,MLSE'is ais voIgt te verklaren: voor hoge SIN wordt
het al dan niet optreden van een MERGE volledig bepaaid
door de onnauwkeurigheden (vooral offsets) in de
schakeling. Fen + en een -MERGE worden echter nooir
verwisseid. Het gevoig hiervan is dat de MLSE-decoder
zich voor deze hoge SIN gaat gedragen ais een gewone
symbool-voor-symbool detector met bijbehorende BER.
Voor SIN = 15 dB is de resuiterende BER echter nog
6.10-8
, terwijl voor Iagere SIN het effect van dit
verschijnsel veel minder sterk is.
Vergelijken we de prestatie van de Ferguson-decoder
met de foutenkans van binaire basisbandtransmissie zoeis
gedaan is in figuur 16, dan bIijkt de degradatie voor-4
een BER van 10 ongeveer 0.8 dB te zijn. Voor hogere
SIN neemt de degradatie af tot minder dan 0.5 dB om pas
voor SIN> 15 dB weer te gaan stijgen. We kunnen dus
concluderen dat de decoder uitstekend voidoet.
47

HOOFOSTUK 4: DE BASISBAND-ONTVANGER
4.1. Systeembeschouwing
Een optimaal basisband digitaal transmissiesysteem
kan r symbolen over een bandbreedte r/2 verzenden met
een f'outenkans:
pe
( 4. 1 )
Het quotignt Eb
/N0
, de gemiddelde energie per bit
gedeeld door de ruisdichtheid, is een veel gebruikte
parameter in verband met digitale transmissiesystemen.
De relatie tot de signaal/ruisverhouding is:
(4.2)
waarbij B de bandbreedte van het (rechthoekige) ontvang
f'ilter en T de bittijd is.
Het optimale systeem vereist dat de invloed van ruis
wordt geminimaliseerd door het gebruik van een optimaal
ontvangf'ilter. Zo'n optimaal ontvangf'ilter zorgt voor
een minimale f'outenkans door de signaal/ruisverhouding
v66r de detector te maximaliseren. In het blokschema van
f'ig. 17- wordt dit f'ilter voorgesteld door HR(f').
La (t-kT)k k D,
ruis
H (ilIl
rAkD (t-kT)k. ~r
d.e.t:e,~or
Fig. 1~. Blokschema van het binaire basisbandsysteem.
48

In ref. [1J p 202 wordt de karakteristiek van dit
filter afgeleid voor witte ruis en delta-pulsen aan de
ingang van het zendfilter. Het blijkt dat in dit geval
voor dit optimele ontvangfilter geldt:
2 2IHR(f)1 = IHT(f)1 = K.IPr(f)l, waarbij Pr(f)
de impulsresponsie van het totale systeem is. ( 4.3)
In een sterk bandbegrensd kanaal zullen de ontvangen
pulsen elkaar overlappen; er zal intersymbool-inter
ferentie optreden. Als de totale overdracht 11011 he\.
systeem, dus de Fourier-transform P (f) van de puls voorr
de detector voldoet aan het zgn. Nyquist-criterium, zal
op de samplemomenten echter geen lSI optreden.
In een minimum-bandbreedte systeem wordt hieraan
voldaan door voor de overdracht een ideaal LPF te kiezen
met bandbreedte 1/2T, de zgn. Nyquist-bandbreedte.
Een ideaal laagdoorlaatfilter is in de praktijk echter
niet te realiseren en de praktische benadering door een
filter met een groat aantal secties, veroorzaakt vooral
door de niet-constante groepslooptijd tach weer voor een
aanzienlijke degradatie door lSI.
Een variant van het Nyquist-criterium laat echter oak
meer geleidelijk afvallende karakteristieken toe.
Een voorbeeld hiervan is de zgn. 'Cosine-RoIl-Off' (CRO)
karakteristiek voor P (f)r
f < 1 - 0<.1 2T
F (f \') fn T [f_ ( 1 - ct.)J} 1-0'.<f 1+ 0<- (4.4)
= C03'- ~r \ J 20<. 2T 2T 2T'
f >1+ 0(
0 2T
49

Bij gebruik van een CRO-karakteristiek met 'Roll-Off'
faktor d is een faktor 0: extra bandbreedte nodig,
waarbij v= 0 overeenkomt met het ideale laagdoorlaat
filter met bandbreedte B = 1/2T.
Deze karakteristiek is in de praktijk met voldoende
nauwkeurigheid te realiseren en door de geleidelijke
overgang van doorlaat- naar spergebied treedt een veel
minder grote variatie van de groepslooptijd op.
Op deze manier is met wat extra bandbreedte ISI-vrije
transmissie praktisch te realiseren. Om een systeem te
krijgen dat co~ qu~ ruis optimaal is, moet de CRO-karak
teristiek over zender en ontvanger verdeeld worden,
zoals bleek uit formule (4.3).
Na deze inleiding gaan we over tot het besisbend
systeem met partial response codering F(D)= 1-D, dat
getekend is in figuur 18.
L. a k (t-kT)k
_~PR5Codat"
ruis
Fig. 18. Basisband PRS-systeem.
De eerste vraag is nu: is het Nyquist-criterium
ongewijzigd op dit systeem van toepassing?
Bedenk hierbij dat de PRS-codering het spectrum
verandert, zodat mogelijk andere zend- en ontvangfilters
nodig zijn om ISI-vrije transmissie te garanderen.
Het uitgangssignaal van de PRS-coder be staat echter uit
gewone polaire rechthoek- of delta-pulsen. Het enige
verschil met binaire data is het optreden van een 'nul'-
puls. Deze beschouwingswijze maakt duidelijk dat voor
50

ISI-vrije transmissie met PRS dezelfde karakteristieken
gebruikt kunnen worden.
Naast de eliminatie van lSI is voor een optimaal systeem
ook minimalisatie van de invloed van ruis noodzakelijk.
In hoofdstuk 2 werd de foutenkans van PRS met FCD) 1-D als
functie van de signaal/ruisverhouding voor de detector
bepaald. Deze bleek Pe
= 3/2.QC\fS!2N) te zijn; er treedt dus
een 3 dB degradatie t.o.v. optimale binaire basisband trans-
missie op.
Zoals we al eerder zagen, kan de signaal/ruis
verhouding v66r de detector echter gemaximaliseerd
worden door gebruik van een optimaal filter. Dit is voor
het PRS-systeem ook mogelijk, maar het vereist weI een
uitvoering die geheel anders is dan die waarvoor in
hoofdstuk 2 gekozen is, te weten codering aan de
zendkant. De frequentie-karakteristiek van de 1-D
codering moet dan namelijk gelijkelijk worden verdeeld
over zender en ontvanger, zoals aangegeven in fig. 19.
Aan de zendkant kan de vereiste~ karakteristiek nog
met een digitaal transversaal filter gerealiseerd
worden, maar bij de ontvanger moet dit met een analoog
filter gebeuren.
Door de SIN voor de detector te relateren aan Eb/N~
aan de ingang van de ontvanger, kan de door de codering
veroorzaakte degradatie in deze alternatieve uitvoe
ringsvorm berekend worden. Omdat de totale filterkarak
teristiek bij verdeling van de filtering niet anders is
dan bij PRS-codering aan de zendkant, is het signaal
vermogen veer de detector in be ide gevallen gelijk.
De beide variant en kunnen dus met elkaar vergeleken
worden door het ruisvermogen voor de detector te
berekenen als functie
ontvangfilter.
van de Eb/N~ aan de ingang van
51
het

ide-GalLPF
'Iz.T
Fig. 19. PRS-systeem met optimale filtering.
Het ruisvermogen voor de detector is:1AT
N 0"2 = N•. JI HRI f) I 2 df
o IhTrI
2N 0 Jsin("IifT) df 2N0
/ I("( T ( 4.5)
0De gemiddelde energie per bit E
bis:
l;2T
Eb A2.JIHTlflI2 df 4A
2/ 11' T ( 4.6)
-lhzTIn het geval van codering geheel aan de zendkant en
een laagdoorlaatfilter met afsnijfrequentie f = 1/2T bij
de ontvanger, is op een analoge wijze uit te rekenen dat
geldt:
( 4.7)
( 4.8)
Hieruit voIgt dat het ruisvermogen voor de detector bij
gelij~e Eb
in het laatste geval een faktor ~ 2/ 8 grater
is, zodat geconcludeerd kan worden dat verdeling van de2
filtering een verbetering van 10.1og("Ii /8) = 0.9 dB
geeft t.O.v. codering aan de zendkant. De degradatie
52
t.o.v. optimale binaire basisbandtransmissie is hiermee
verminderd tot 2.1 dB.
Omdat oak het gewenste nulpunt voor f = 0 na het
gewijzigde zendfilter is behouden gebleven, lijkt
deze alternatieve opzet van het PRS-systeem erg gunstig.
Zoals reeds bleek in hoofdstuk 2, is tach gekozen voor
PRS-codering aan de zendkant. De reden hiervoor is, dat
optimale filtering dan weI optimaal is in het geval van
symbool-voor-symbool detectie, maar niet bij gebruik van
een (niet-lineaire) MLSE-decoder. In dat geval speelt
namelijk ook de correlatie tussen de ruissamples mee, en
niet aIleen de SIN zoals in het geval van symbool-voor
symbool detectie.
De simulatie- en meetresultaten van hoofdstuk 2 geven
hier al een aanwijzing van. De 3 dB degradatie blijkt
namelijk door de Ferguson-decoder grotendeels teniet
gedaan te worden. Met toepassing van optimale filtering
zou PRS dan dus 0.9 dB beter zijn dan optimale binaire
basisbandtransmissie. Dit is natuurlijk onmogelijk en we
moeten dus concluderen dat verdeling van de - 0
filterkarakteristiek over zender en ontvanger bij
gebruik van een MLSE-decoder niet zinvol is.
Je resterende vraag is nu: wat is de optimale
verdeling van de Nyquist-karakteristiek nu blijkt dat
gelijke verdeling van de filtering over zender en
ont~anger niet optimaal hoeft te zijn ?
In ~ef. [10] p 23 en verder wordt afgeleid dat in een
bi~air basisbandsysteem Nyquist-filtering geheel aan de
on~vangkant een degradatie van slechts 0.3 dB in de SIN
V88r de detector tot gevolg heeft. Bij deze afleiding is
CGL-filtering met ~=1 en x/sinx correctie verondersteld.
Vc~'· kleinere ~ zal het resultaat niet spectaculair
~~~ijken.
~e hebben gezien dat niet aIleen de SIN voor de
dE'0stor de prestatie van de MLSE-decoder bepaalt.
53

Oit houct in d~t verdeling van de CRO-karakteristiek
over zender en ontvanger in ons geval niet per s~
0.3 dB beter hoeft te zijn, dan Nyquist-filtering aan de
ontvangkant. Op grond van deze averweging kunnen we zander
bezwaar vaar de laatstgenaemde variant kiezen.
4.2. Het antvangfilter
Op grond van deze argumenten zullc~ de x/sinx-equa
lizer en het Nyquist-filter in de antvanger geplaatst
worden, terwijl in de zender het spectrum van het uit
gezanden signaal aIleen begrensd zal worden am storing
in buurkanalen te vermijden. De gekazen karakteristiek
van het antvangfilter is dus de valgende:
If fT
sin(lTfT)f < f = 1 - 0<.
2T
TIfT 2flT"Tr 1-0<.]}sin(lTfT)Ocos 2o<Li-2"T
( 4.9)
o f > f =+1 + 0<
2T
Als we de spectrale vermagensdichtheid van het
gecadeerde signaal bekijken (fig. 9), zien we dat het
avergrote deel van het signaalvermagen van de haafdlab
zit in het gebied beneden f = 3/4T. Op grand hiervan
wardt vaar het CRD-filter een 'Rall-Dff'-faktar van
~ = 0.5 ge~azen.
De karakteristiek van het antvangfilter is getekend
in fig. 20. In de praktijk kan deze karakteristiek
aIleen benaderd worden. Dmdat de spectra Ie vermagens
dichtheid van het signaal rand de afsnijfrequentie van
het werkelijke filter laag is, zal deze benadering
slechts een geringe degradatie door lSI veraarzaken.
54

""'",t r:iltf,r :::al gerealiseerd worden met een cascade
I'" ,= t~ : ---1 d g iJ L' 0 r ] d a t f i 1 t e J""' 5 , waarvan de
1
1
De afsnijfrequenties voor beide secties werd gelijk
ge~ozen. Met de waarden f0
= 450 kHz a 1a
2= 1.2 hlee~ de resulterende karakteristiek
voldoen. (zie fig. 20)
rl-ll- ,,~:, 1
.1,
.1\
en
goed te
IFig. 20. Karaf--teristiel-, van het CRD-filter met d... = yen
de praf--tische benadering door een vierde orde
B IJ r t e r w0 r t h -1 a a g door 1 a a t f i 1 tel'
55

Het Nyquist-criterium stelt niet aIleen eisen aan de
amplitude-karakteristiek van het ontvangfilter, maar ook
aan de fasekarakteristiek. Is deze niet lineair in het
van be lang zijnde frequentiegebied, dan zal de resul
terende niet-constante groepslooptijd een degradatie van
het oogpatroon veroorzaken. Hoewel het mogelijk zou zijn
de groepslooptijd van het Butterworth-filter te bereke
nen, is ervoor gekozen om het filter uit te rusten met
variabele componenten. Uitg~~nd€ ~an de berekende
karakteristiek, zal het filter vervolgens afgeregeld
worden op een zo goed mogelijk oogpatroon. Op enige
degradatie als gevolg van de door het filter veroor
zaakte fasevervorming moeten we daarbij wel rekenen.
Wanneer deze onoverkomelijk groot blijkt te zijn, is
groepslooptijd-correctie met speciale filtersecties
mogelijk.
56

4.3 De klokterugwinning
In 4.1 is al gezegd dat de pulsen van het gecodeerde
datasignaal dezelfde vorm hebben als in een polair
binair basisbandsysteem; daarom bleek het Nyquist
criterium onveranderd van toepassing. Om deze reden
lijkt ook het klokterugwinningscircuit overgenomen te
kunnen worden van het binaire systeem. Dit is echter
r', i e the t g e val .
In fig. 21 zijn de gestyleerde oogpatronen van beide
systemen getekend, voor een oneindig hoge signaal/ruis
verhouding en een CRO-karakteristiek met ex: = ,.
Het werkelijke oogpatroon voor Nyquist-pulsen verschilt
duidelijk van fig. 21a; bij een relatieve extra
bandbreedte cI....< zal jitter in de nuldoorgangen
optreden. Hier zal later nog op in worden gegaan.
1
-1
a.
1
o
-1
b.
Fig 21. Gestyleerde oogpatronen van een a. binair en
b. dicode datasignaal
Uit het signaal van fig. 21a kan met een nuldoor
gongs-detector gevolgd door een PLL een referent ie
kloksignaal gegenereerd worden. Het pseudo-ternaire
datasignaal van fig. 21b verschilt echter in 2
opzichten van het binaire en dit maakt het noodzakelijk
een ander klokterugwinningcircuit te gebruiken.
In de eerste plaats moet door het voorkomen van de
57

'nul'-puls een detector gebruikt worden, die schakelt op
het niveau tussen 0 en of tussen 0 en -1.
Zoals te zien in fig. 21b wordt dit drempelniveau
echter ook niet in aile gevallen op hetzelfde moment
overschreden. Een overgang van naar -1 zorgt b.v. voor
een snellere passering van dit niveau dan een overgang
van naar 0 of vice versa.
De PLL die voIgt op de niveau-detector, heeft echter
een lusbandh~eedte die veel Kleiner is dan deKl~k-
frequentie, zodat deze variaties in de nuldoorgangen
niet gevolgd kunnen worden. Hierdoor blijft de
fasejitter van de teruggewonnen referentie-klok tach
beperkt. Het resulterende klokterugwinningscircuit v~n
fig. 22 presteert echter essentieel slechter dan het
overeenkomstige circuit bij binaire tr~nsmissie.
PLlr ... ,
~PRE NIVO
FILTER lle.1:.e.clol"'r
P.D LOOP- -~
F"ILT£k
Ghempelveo
doc.k
Fig. 22. Klokterugwinningscircuit voor ternaire data
Uit fig. 22 zien we dat de niveaudetector vooraf
gegaan wordt door een filter. Het blijkt namelijk dat
Nyquist-filtering dan wei optimaal is am lSI op de
samplemomenten te verwijderen, maar zeker niet voor de
klokterugwinning. Zoals reeds gezegd blijkt voor sterk
bandbegrensde pulsen duidelijk jitter in de nuldoor
gangen op te treden. Dit geldt ook voor de doorg~ngen
over het drempelniveau van het pseudo-ternaire signaal.
Dit is geen essentieel verschijnsel, maar wordt dus
58

veroorzaakt doordat de CRO-karakteristiek niet optimaal
is om de intersymbool-interferentie tijdens de nuldoor
gangen te elimineren.
Een banddoorlaatfilter met afsnij-frequenties 1/4T en
3/4T blijkt hiervoor beter te voldoen. (zie ref. [8]).
De hoog-af portie van dit filter wordt gevormd door het
Nyquist-filter, zodat het 'prefilter' in fig. 22 alleen
hoeft te bestaan uit een hoogdoorlaatfilter.
Voor de dimension~ring van het klokterugwinnings
circuit zijn de natuurlijke frequentie W en den
dempingsfaktor 5 van de PLL van belang. In het type dat
gebruikt zal worden, een tweede orde PLL met 'high
gain-loop' be!invloeden deze parameters de ruis- of
lusbandbreedte van de PLL als volgt:
(4. HI)
De optimale waarde van BL
voor de gebruikte bitsnelheid
van 1 Mbit/s ligt in de orde van 1kHz tot 10 kHz (zie
hiervoor ook hoofdstuk 4). De meest geschikte waarde zal
proefondervindelijk vastgesteld worden. De demping moet
vrij groot zijn om het effect van de jitter in de
gegenereerde klokfrequentie zo klein mogelijk te houden;
vanwege de ongunstige invloed op de ruisbandbreedte moet
$ echter niet groter dan 10 gekozen worden.
De fasedetector die in de PLL van fig. 22 gebruikt
wordt, is van het digitale type. oit maakt het mogelijk
om bovenstaand circuit te verbeteren door gebruik te
maken van de gedetecteerde data. oit 'data-aided'
circuit, dat overigens niet gerealiseerd is, gebruikt 2
detectoren om te bepalen of een nul is opgetreden.
Alleen dan wordt de bijbehorende overgang voor de
klokterugwinning gebruikt. Dit principe zou eenvoudig
ge~implementeerd kunnen worden met 2 niveau-detectoren
die op het voorlopige kloksignaal geklokt worden.
59

4.4. Afleiding van de drempelwaarde.
Voor de decodering van het pseudo-ternaire data
signaal is een drempelwaarde nodig. De symbool-voor
symbool detector gebruikt deze waarde om te beslissen
tussen b.v. 0 en 2A, maar ook voor de Ferguson-decoder
is zo'n drempelniveau noodzakelijk. Het circuit hiervoor
is gecombineerd met een beperkt werkende AGC die als
doel heeft de amplitude van de pulsen voor de decoder zo
constant mogelijk te houden. De decoder werkt door zijn
beperkte snelheid en nauwkeurigheid namelijk niet voor
alle puls-amplitudes even goed.
Een blokschema van het circuit is getekend in fig.
23.
SIGNAAL
IN
AC;,DC. LPF
SI6tJML IAIT
Fig. 23. Blokschema van het circuit voor AGC en
afleiding van de drempelwaarde.
De werking van het circuit is eenvoudig; m.b.v. de
gelijkrichter en het laagdoorlaatfilter wordt een
langzaam vari~rend signaal gegenereerd dat evenredig is
met de amplitude van het uitgangssignaal van de
regelbare versterker. Met de spanningsdeler kan dit
signaal precies midden in het oog van het oogpatroon
60

n C, ; '.:'>" !l :" S e '-, t e ~ ,j . He t; i g n a a 1 w0 l' d t. v e r vol g ens verge -
1 e c. e 'l r", e tee 1"1 1- e f e l' e 1"1 tie n i ve au; e e n -f 0 u t v e r s t e r k e r
regelt aan de hand daarvan de versterking van de
signaalverstel'ker bij.
Bij een per-fect werkende AGC zou het niet nodig zijn
een drempelwaarde aan de decoder toe te voerenj deze zou
dan op een vaste waarde ingesteld kunnen worden. Bij te
Kleine ingangssignalen zal een AGC de uitgangsamplitude
echter niet meer constant kunnen houden.
Het in -fig. 23 getekende laagdoorlaat-filtar bepaalt
de responsietijd van de AGC. Deze moet kort genoeg zijn
om de veranderingen in de ingangsamplitude te kunnen
volgen, maar mag niet reageren op bepaalde patronen in
de data. EI' is gekozen voor een RC-tijd van 1.5 ms,
zodat een serie van 10 nullen een daling van slechts %
in de drempelwaarde veroorzaakt.
Het nadeel van de aangebrachte traagheid is dat de
drempelwaarde en de AGC bij het begin van een sessie ook
lange tijd nodig hebben om 'op te komen'.
Met een andere vorm van AGC, die wel coherente AGC
genoemd wordt, zou dit te voorkomen zijn. Dit principe
is niet gerealiseerd, maar het onderwerp zal in hoo-fd
stu~ 5 kort aangestipt worden; het hangt namelijk samen
met de draaggol-fterugwinning die daar beschreven wordt.
4.5. Implementatie van de basisband-ontvanger.
De schema's van de basisband-ontvanger zijn te vinden
in Appendix 3.4. De klokterugwinning, de drempelwaarde
a-fleiding en het Nyquist--filter zijn gecombineerd tot
module.
Figuur A12 bevat het schema van de klokterugwinhing,
uitgevoerd naar het blokschema van -fig. 22. Het pre
-filter is een eenvoudig eerste-orde hoogdoorlaat-filter
met RC-tijd 725 ns. Oit bleek in de praktijd de beste
61
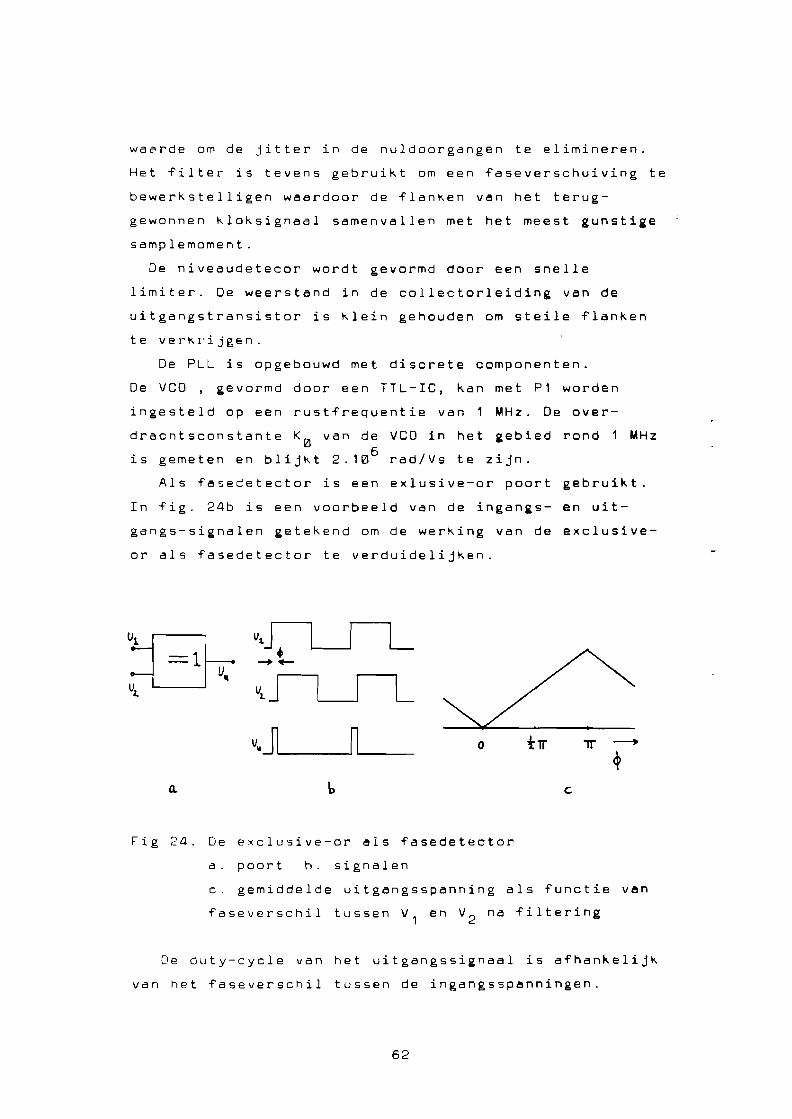
waerde om de jitter in de nuldoorgangen te elimineren.
Het ~ilter is tevens gebruikt om een ~aseverschuiving te
bewerkstelligen waardoor de ~lanken van het terug
gewonnen kloksignaal samenvallen met het meest gunstige
samplemoment.
De niveaudetecor wordt gevormd door een snelle
limiter. De weerstand in de collectorleiding van de
uitgangstransistor is klein gehouden om steile ~lanken
te verkl'ijgen.
De PLL is opgebouwd met discrete componenten.
De VCO gevormd door een TTL-IC, kan met P1 worden
ingesteld op een rust~requentie van MHz. De over-
drachtsconstante K~ van de VCO in het gebied rond MHz
is gemeten en blijkt 2.1~6 rad/Vs te zijn.
Als ~asedetector is een exlusive-or poort gebruikt.
In ~ig. 24b is een voorbeeld van de ingangs- en uit
gangs-signalen getekend om de werking van de exclusive
or als ~asedetector te verduidelijken.
us==1UII
UI.
a.
V1r-u-L+-+-
b c.
Fig 24. De exclusive-or als ~asedetector
a. poort b. signalen
c. gemiddelde uitgangsspanning als ~unctie van
~aseverschil tussen V, en V2
na ~iltering
De duty-cycle van het uitgangssignaal is a~hankelijk
van het ~aseverschil tussen de ingangsspanningen.
62

Integreren we de uitgangsspanning met het lusfilter, dan
krijgen we als functie van het faseverschl ~ de karak
teristiek van fig. 24c. We zien dat het uitgangssignaal
van de fasedetector een gemiddelde waarde ongelijk aan
o heeft. Hiermee zal rekening gehouden moeten worden bij
het kiezen van de rustfrequentie van de VCO.
Omdat de logische niveau's van de exor exact vast
moeten liggen -het digit ale element wordt in feite
analuog gebruikt- wordt voor een (i.igh speed) CMOS type
gekozen. De logische niveau's van CMOS liggen op exact ~
en 5 Volt. Met deze gegevens is eenvoudig de fasedetec-
tor-constante van de exor aT te leiden: Kd
= 5/2~ V/rad.
De loop gain van de PLL wordt hiermee K0
Kd
1.6 MHz.
Als loopfilter kiezen we voor een zgn. lead/lag
filter met de karakteristiek zoals getekend in fig. 25a.
Door gebruik van dit type filter hebben we de mogelijk
heid de dempingsconstante en de natuurlijke frequentie
van de PLL afzonderlijk te kiezen.
rFig. 25 Karakteristiek van het loopfilter
a. lead/lag filter b. als a. met extra hoog-afval
Het blijkt dat het uitgangssignaal van het lead/lag
filter nag teveel van de signaalcomponenten rond 2'MHz
doorlaat. Er is daarom nag een extra laagdoorlaatsectie
toegevoegd. De karakteristiek die ontstaat na toevoeging
van deze extra sectie zien we in fig 25b. De afsnij
frequentie is zo groat gekozen dat de extra laagdoor
laatsectie de parameters van de PLL niet be!nvloedt.
63

De gunstigste tijdconstantes van het filter zijn
proefondervindelijk vastgesteld op:
T 0.26 5, l2 10 ms, T"3 = 10 fS1
Dit levert voor PLL-parameters de volgende waarden op:
\f3liGJ = L~~'d :: 2.1 103 rad/sn
5 1= "2(,Jn t 2 :: 10.5
B ::_1 (.J (~ ;- 1/45 ) :: 1 1 kHz
L 2 n
De ruisbandbreedte van de PLL is vanwege de hoge
vereiste dempingsfactor vrij groot uitgevallen.
De 'data-aided' klokterugwinning, zoals eerder in dit
hoofdstuk besproken, zou hier waarschijnlijk verbetering
in kunnen brengen; de oorzaak van de hoge vereiste
demping lijkt namelijk de variatie in de passeringen van
het drempelniveau te zijn. (zie fig. 21b)
In fig. A13 van Appendix 3 is het circuit voor de
gecombineerde AGC en drempelwaardeafleiding getekend.
De regelbare versterker van fig. 23 is hierbij uitge
voerd als een regelbare verzwakker, gevolgd door een
versterker met vaste versterkingsfaktor. Een FET,
ingesteld als spanningsafhankelijke weerstand, doet
dienst als verzwakker. Een alternatief zou zijn geweest
om de FET op te nemen in de terugkoppellus van de
versterker. De gekozen configuratie heeft als voordeel
dat de signaalspanning over de FET altijd constant is.
Een tweede voordeel blijkt te zijn dat de bandbreedte
verandering die altijd het gevolg is van een verandering
in de versterking, in dit geval Kleiner is.
De AC/DC omzetter is uitgevoerd als een dubbelzijdige
gelijkrichter, die ook voor Kleine ingangsspanningen
64

nauwkeurig werkt, doordat de drempelspanning van de
diodes wordt gedeeld door de open-Ius versterking van
de opamp. Hiervoor moest daarom weI een breedbandig type
gekozen worden.
Het uitgangssignaal van de gelijkrichter wordt
gefilterd en versterkt door A3. De versterking is te
regelen met P2, zodat het uitgangssignaal gebruikt kan
worden als de drempelwaarde voor de klokterugwinning en
de decoder. Hiervoor moet deze spanning precies midden
in het oog van het oogpatroon worden afgeregeld.
A4 vormt de foutversterker en integreert de som van
de (negatieve) referentiespanning, in te stellen met P1
en de drempelwaarde. Het uitgangssignaal wordt gebruikt
om de verzwakker bij te regelen, waarmee de AGe-Ius
gesloten is. T2 dient om de uitgangsspanning van A4 'om
te klappen' volgens y = -1 - x. Dit is nodig omdat
verlaging van de gatespanning van de FET zijn weerstand
doet toenemen. De minimale weerstand van de FET is
ongeveer 2501L, zodat deze regeling de uitgangsspanning
constant kan houden voor een variatie van max. 15 dB in
de ingangsspanning.
Het schema van het Nyquist-filter is getekend in fig.
A14. Het is een conventioneel 4 de orde filter, opgebouwd
met breedbandige operationele versterkers. De component
waarden zijn berekend aan de hand van de vereiste karak
teristiek, die in 4.2 bepaald is. Vervolgens is het
filter afgeregeld op een zo goed mogelijk oogpatroon.
65

HOOFDSTUK 5: MODULATI~ EN COHERENTE DEMODULATIE
5.1. Vermogenseffici~ntie van het voorgestelde systeem.
In deze paragraaf zal de vermogenseffici~ntie van
datatransmissie met een draaggolfpiloot aan een nader
onderzoek onderworpen worden. Als referentie gebruiken
we hierbij de foutenkans als functie van Eb/N~ van het
optimale binaire basisband-systeem van formule (4.1).
De foutenkans van coherent gedetecteerde BPSK of QPSK
met ideale draaggolfterugwinning is namelijk hieraan
gelijk.
In de inleiding is al gebleken dat vergeleken met de
conventionele draaggolfterugwinning, het systeem met
draaggolfpiloot het nadeel heeft, dat de jitter in de
teruggewonnen draaggolf groter is. Draaggolfterugwinning
bij BPSK of QPSK met een niet-lineaire regenerator is
wat dat betreft beter, omdat daar de fasejitter nog
gedeeld wordt. We zullen nu berekenen hoe groot de
degradatie van de foutenkans is die door deze extra
fasejitter wordt veroorzaakt. Hierbij moet ook rekening
gehouden worden met het verminderde vermogen in het
datasignaal, vanwege het feit dat een gedeelte van het
vermogen voor de draaggolfpiloot gebruikt wordt.
Voor de foutenkans P van coherent gedetecteerde BPSKe
t.g.v. een fasefout ~ in de referentiedraaggolf geldt:
( 5.1)
( 5 . 2)
Om de totale foutenkans te krijgen, moeten we integreren
met de Kansverdeling van de fasefout:
"IT
P e Jp(~)-IT
66

In reT. L8] vinden we voor de kansverdeling van de
fasefout in een eerste orde PLL als functie van de SiN
in de Iusbandbreedte ~
e 01.. .cos ~
( 5.3)
0(e
Voor 0<» 1 mag 1121
(0<) benaderd worden door
zodat geIdt:
eo('[COS ~ - 1]
( 5.4)
Dit geeft tenslotte de volgende uitdrukking voor de
foutenkans:
Tr
Pe
-lr
eo( [cos ~ - 1]
--~;=======~.Q(\12( 1-P)Eb/NI2I'COS f) .d~V2~/o(
(zie ref. [9] p 21212)
( 5.5)
Hierbij is aangenomen dat we een fractie p van het
totale vermogen bestemmen voor de draaggolfpiloot, zodat
een fractie 1-p overblijft voor de data.
Als we de Iusbandbreedte van de PLL BL noemen, dan geldt
voor de signaal/ruisverhouding in BL :
p
( 5.6)
Door formule (5.5) met gebruik van (5.6) numeriek te
integreren, kan bij een aantal waarden voor p de Pe
versus Eb
/Nl2l-karakteristiek bepaald worden.
Hiervoor moet weI eerst een keuze gemaakt worden voor de
67

bandbreedte van de PLL BL
in samenhang met de bittijd T.
We zuIIen hier vooruitlopen op par. 5.3 waar BL.T = 0.01
de meest gunstige keuze zal bIijken te zijn.
De resultaten van de numerieke benadering zijn in
grafiekvorm te vinden in fig. 26.
~o
0.01
o
p = 0.063
r:,/ = -11. J.B
\ .\ ~.
I ~ \
I ideaal' \ .~.I \ ~
.LJ \\l' I \'\
\ p = 0.15'''\ ·v =- B cLB
\ \
\\\ \\ \\ \.\ \
\~\ \
10.11 -+-...,.----,-~-r__.....,..--r-__r-_T_u..,r_.,..--....,..--...,--_,
-l10
-11.0
Fig. 26. Foutenkans als functie van Eb
/N0
bij coherente
detectie van BPSK met draaggolfpiloot.
68
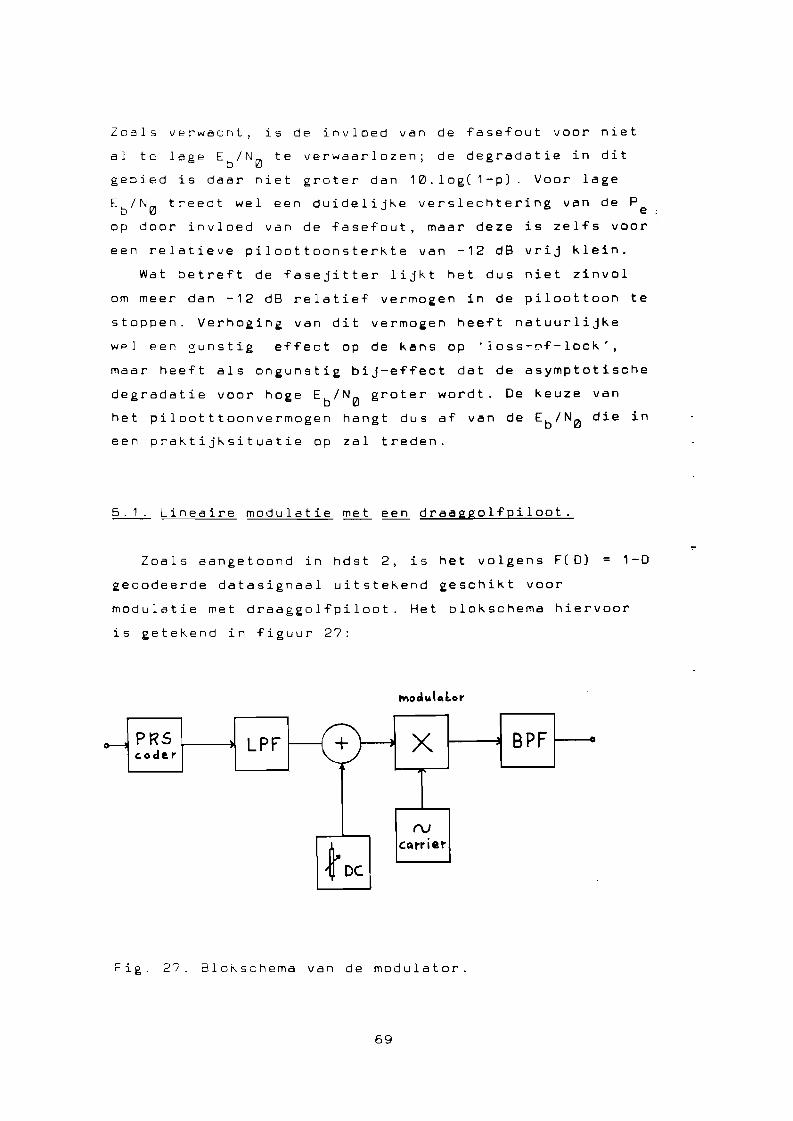
Zoals verwac~t, is de invloed van de fasefout voor niet
al te lage Eb
/N0
te verwaarlozen; de degradatie in dit
gebied is daar niet groter dan 10.log( 1-p). Voor lage
Eb
/N0
treedt weI een duidelijke verslechtering van de P eop door invloed van de fasefout, maar deze is zelfs voor
een relatieve piloottoonsterkte van -12 dB vrij klein.
Wat betreft de fasejitter lijkt het dus niet zinvol
om meer dan -12 dB relatief vermogen in de piloottoon te
stoppen. Verhoging van dit vermogen heeft natuurlijke
wp] pen ~unstig effect op de kans op 'joss-of-lock',
maar heeft als ongunstig bij-effect dat de asymptotische
degradatie voor hoge Eb
/N0
groter wordt. De keuze van
het pilootttoonvermogen hangt dus af van de E b /N 0 die in
een praktijksituatie op zal treden.
5.1. Lineaire modulatie met een draaggolfpiloot.
Zoals aangetoond in hdst 2, is het volgens F( D) 1-0
gecodeerde datasignaal uitstekend geschikt voor
modulatie met draaggolfpiloot. Het blokschema hiervoor
is getekend in figuur 27:
modlAl.lor
PRS LPF~ X BPF~c.ode.r
rv
toe cQrrier
Fig. 27. 8loKschema van de modulator.
69

De eigenlijke modulator wordt in het getekende
systeem gevormd door een vermenigvuldiger, die wordt
aangestuurd met het gefilterde datasignaal.
Het is eenvoudig in te zien dat door optelling van een
DC-component bij dit datasignaal een component met de
draaggolffrequentie in het gemoduleerde signaal
ontstaat.
Hiervoor is weI vereist dat de overdracht van de
vermenigvuldiger van signaalpoort naar uitgangspoort
li~eair is. In de praktijk wordt een d~bbelgebalanceerde
mixer (DBM) gebruikt en deze voldoet onder bepaalde
omstandigheden inderdaad aan deze eis.
Dmdat toch lineair gemoduleerd moet worden, is het
zinvol om het datasignaal te filteren v66r modulatie.
Een laagdoorlaatfilter is immers nauwkeuriger (eventueel
digitaal) te implementeren dan een banddoorlaatfilter
rond de gebruikte draaggolffrequentie van 70 MHz.
Behalve deze premodulatie-filtering is ook nog
postmodulatie-filtering nodig om de harmonischen van de
draaggolffrequentie te onderdrukken; de in de praktijk
gebruikte mixer is namelijk niet lineair met betrekking
tot beide ingangspoorten.
In hoofdstuk 4 is gekozen voor essenti~le filtering
in de ontvanger, zodat beide filters in de modulator
aIleen dienen om het spectrum te beperken. Binnen de
hoofdlob, dus voor f < 1/T mag het spectrum niet
aangetast worden.
Als premodulatie-~ilter is voor een vierde orde
Butterworth laagdoorlaatfilter met een bandbreedte van 1.2
MHz gekozen, met als modulus van de overdrachtsfunctie:
/}--'11 ( j f )1.... =
1
70
( 5.7)
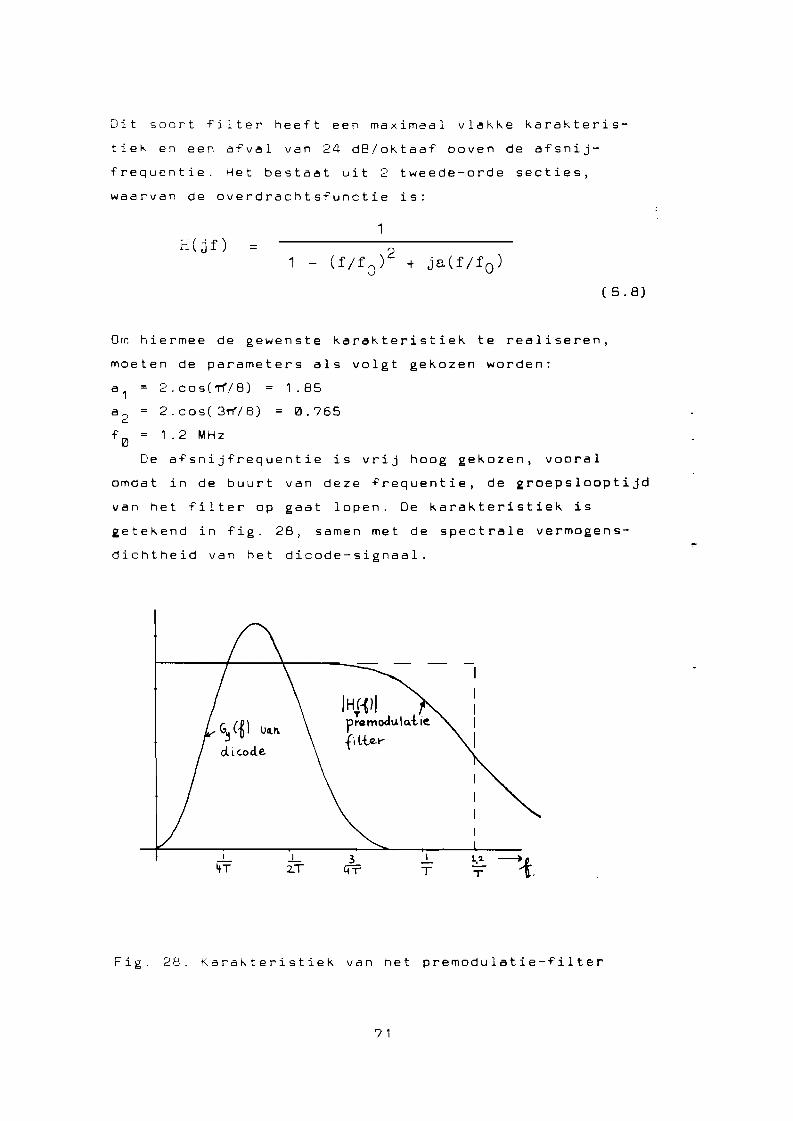
Dit soort filter heeft een maximaal vla~~e karakteris-
tie~ en een afval van 24 dB/oktaaf boven de afsnij
frequentie. Het bestaat uit 2 tweede-orde secties,
waarvan de overdrachtsfunctie is:
H(jf) =1
1
( 5.8)
o~ hiermee de gewenste karakteristiek te realiseren,
moeten de parameters als volgt gekozen worden:
a1
2.cos('T'1'/8) = 1.85
a 2 2 . cos ( 3rf/8) = 0. 765
f0
1.2 MHz
De afsnijfrequentie is vrij hoog gekozen, vooral
omdat in de buurt van deze frequentie, de groepslooptijd
van het filter op gaat lopeno De karakteristiek is
gete~end in fig. 28, samen met de spectrale vermogens
dichtheid van het dicode-signaal.
I
itT..L2.T
!Hc-{JIp~QmocJl.L'Qi.ie
fi Lt,(l.\""
I
T
Fig. 28. Kara~teristiek van het premodulatie-filter
71

riet postmodulatie-filter dient om de harmonischen van
de draaggolffrequentie op 140 en 210 MHz, die ontstaan
door het niet-lineaire karakter van de mixer, te onder-
drukken. Ook intermodulatieprodukten van signaal en
draaggolf moeten verwijderd worden. Hiervoor zou een
eerste orde bandfilter voldoende zijn. Een tweede eis is
echter dat het spectrum binnen de hoofdlobben (tussen 69
en 71 MHz) intact moet blijven.
Dit is beter te realiseren door 2 naast elkaar
afgeste~~e bandfilters te gebruiken. Om ze~e~ te zijn
dat de amplitude-karakteristiek van het filter rond 70
MHz vla~ is, zal een bandbreedte van 7 MHz gekozen
worden. Met deze keuze zijn we ook verzekerd van een
lineaire fasekarakteristiek in het van belang zijnde
frequentiegebied. De kwaliteitsfaktor Q van het
postmodulatie-filter komt hiermee op 10.
Het gekozen tweede orde bandfilter is ook weer een
Butterworth-filter vanwege de eis van een maximaal
vlakke karakteristiek. Zo'n Butterworthbandfilter van
de tweede orde (in feite een vierde orde filter) heeft
de volgende overdrachtsfunctie:
k- (j QV) [1 f f O
= met v = fO
fV1 (Qv)4+
( 5 .9)
72

oeze karakteristiek kan gerealiseerd worden m.b.v. 2
eerste-orde bandfilters met centrale frequenties a.f~ en
f0
/a en een kwaliteitsfaktor Q', met
- ,a - a sin(-r1'/4) /Q en Q ' Q/cos(-r1'/4)
Voor Q='~ en f~ = 7~ MHz geldt: a = \J2I2~ en Q'=1~\f2,
zodat de twee bandfilters centrale frequenties van 72.5
en 67.6 MHz en een kwaliteitsfaktor van 14 krijgen.
De karakteristieken van de afzonderlijke filters, samen
met die van het resulterende tweede orde bandfilter zijn
getekend in fig. 29.
1Z.,S
Fig. 29. Karakteristiek van het postmodulatiefilter,
samengesteld uit 2 eerste-orde bandfilters
73

5.3. oraaggolfterugwinning ~ demodulatie.
In deze paragraaf zal het resterende deel van de ont
vanger besproken worden, d.i. de coherente demodulatie
en de draaggolfterugwinning die daarvoor nodig is.
Het is niet eenvoudig een goede PLL te construeren voor
de gebruikte draaggolffrequentie van 7~ MHz, zodat
besloten werd het signaal met een mengtrap naar een
lagere frequentie (5 MHz) te transformeren.
X 8PF
I'
l.
krisl:.",[- r5" MH~oscillo.tot
Fig. 30. Blokschema van de mengtrap.
Het blokschema van deze mengtrap is getekend in fig.
30. De mixer bestaat, evenals de modulator van 5.2,uit
een geschakelde vermenigvuldiger. Het bandfilter dient
om de ongewenste mengprodukten uit te filteren. Dit
filter is vanwege de lage centrale frequentie en het
brede doorlaatgebied dat vereist is, uitgevoerd als de
cascade van een laag- en een hoogdoorlaatfilter.
Het hoogdoorlaatfilter is een eenvoudig eerste Qrde
filter met een afsnijfrequentie van 5~~ kHz. Dmdat het
laagdoorlaatfilter moet zorgen voor de eigenlijke uit
filtering van de ongewenste mengprodukten, worden
hieraan hogere eisen gesteld. Er is gekozen voor een 4de
74

orde Butterworth Karar,teristieK met een -3 dB frequentie
van 10 MHz. De ongewenste frequenties rond 70 MHz worden
hierdoor met minstens 60 dB verzwaKt.
In het volgende gedeelte kunnen we de aanwezigheid
van de mengtrap vergeten en uitgaan van een draaggolf
frequentie van 5 MHz. Het circuit voor de terug-winning
van deze draaggolf is getekend in fig. 31.
BPF + J P.D.LOOP
I--
FILTER
~i looH oonfille r limiter
VCO
\ --"X v
PLL
Fig, 31. Circuit voor de draaggolfterugwinning.
Allereerst zullen de circuits besproken worden die
voorafgaan aan de PLL. Oat zijn het zgn. piloottoon
fi:ter, de faseverschuiver en de limiter.
Met piloottoonfilter is een bandfilter, dat smal is
t .. , v. de breedte van het data-spectrum en dat dat dient
ome modulatie rond de piloottoon weg te filteren,'
~p' ~ag op het eerste gezicht vreemd lijken dat dit
~l -~ttoonfilter noodzakelijk is; een PLL kan immers
De- 'louwd worden als een verstembaar bandfilter dat zeer
Si1',-' gemaakt r.an worden. Het bandfilter voor de PLL is
75

echter nodig vanwege de limiter, die aan de fasedetector
van de PLL voorafgaat. Hierin treedt namelijk door het
inherente niet-lineaire karakter AM/PM-conversie op en
daarmee fasevariaties (afhankelijk van het datapatroon)
in de uiteindelijk teruggewonnen draaggolf.
De eisen die aan het piloottoonfilter gesteld moeten
worden zijn onderling tegenstrijdig. Enerzijds moet
zoveel mogelijk modulatie verwijderd worden om de
fasejitter in de draaggolf zo klein mogelijk te houden.
Anderzijds mag de piloottoon, die enigszins in
frequentie verschoven kan zijn t.o.v. zijn nominale
waarde van S MHz door het filter als gevolg daarvan niet
aangetast worden.
De amplitude is daarbij niet van belang; het filter
wordt toch gevolgd door een limiter. Het is echter weI
belangrijk dat de door het filter veroorzBakte fa sever
schuiving niet te groot wordt bij een variatie van de
piloottoonfrequentie. Zo'n faseverschuiving veroorzaakt
namelijk rechtstreeks een fasefout ~ in de teruggewonnen
draaggolf en daarmee een vermindering van het uitgangs-2
vermogen van de demodulatortrap van 1~.log(cos ~).
We zullen nu eerst het vermogen van de modulatie
berekenen dat resteert aan de uitgang van het piloot
toonfilter. Hierbij gaan we uit van een tweede orde
Butterworth-bandfilter met de overdrachtsfunctie van
(S.Hl)
. df1
1=
(5.9). Bij de berekening gebruiken we echter het
laagdoorlaat-equivalent en we veronderstellen verder dat
aIle vermogen in de hoofdlob(ben) van het spectrum zit.
Het vermogen in de modulatie na filtering is dan:
1/ 'I'
i' = oj G/f).!h(f)1 2df
1/'l'
Jsin4 elf f ']~) .
o (f'T)2.
76

NumerieKe integratie van (5.10) geeft als resultaat een
relatief vermogen in de restmodulatie van -22.2 dB voor
B = 100 kHz en -14.7 dB voor B = 200 kHz vergeleken met
het vermogen in de modulatie v~or het filter.
(De genoemde bandbreedtes komen overeen met fL
50,
resp. 100 kHz voor het equivalente LPF).
Rekening houdend met het feit dat het vermogen in de
draaggolfpiloot ook nog maar een fractie van het totale
vermogen is ( -12 tot -8 dB), wordt voor een bandbreedte
van 100 kHz, dus een Q van 50 gekozer,. Met cen bereke
ning, analoog aan die voor het postmodulatie-filter,
voIgt dan voor de afzonderlijke, naast elkaar afgestemde
eerste orde bandfilters:
Ia = 1.0071, Q
f 0 1 = 5.035 MHz, 4.965 MHz.
Voor de fasekarakteristiek van dit filter geldt:
~( f)
met v
arctan (Q'v1
) - arctan (Q'v2
) (5.11)
Met formule (5.11) is eenvoudig te berekenen dat een
verschuiving van de nominale frequentie van 5 kHz resul
teert in een degradatie van 0.09 dB, terwijl een ver
schuiving van 10 kHz al een degradatie van 0.38 dB
geeft. Hieruit blijkt dat de keuze van het piloottoon
filter vrij kritisch is. Als in de praktijk blijkt dat
een verbreding van het filter geen ongunstige invloed
heeft op de BER, zal de bandbreedte van 100 kHz iets
vergroot kunnen worden.
De limiter van fig. 31 is noodzakelijk om de eigen
schappen van de PLL constant te houden bij vari~rende
ingangsspanning. De uitgangsspanning van de fasedetec-
77

tor, uitgevoerd als de be~ende scha~elende vermenigvul
diger, is namelij~ evenredig met de ingangsspanning.
Dit bete~ent dat ook de fasedetectorconstante evenredig
is met de ingangsamplitude.
Als alternatief voor de limiter zou ook een AGC-
circuit gebruikt kunnen worden. Hierop zal aan het eind
van deze paragraaf kort worden ingegaan.
In de lock-toestand is het uitgangssignaal van de VCD
van fig. 31 900
uit fase met het ingangssignaal van de
PLL. Dmdat de demodulator ec~ in-fase draaggolf nodig
heeft, is na het piloottoonfilter nog een faseverschui
vel' toegevoegd. Zoals we ook al gezien hebben bij de
behandeling van het piloottoonfilter, treedt op de flank
van een bandfilter een faseverschuiving 0Pi voor de
faseverschuiver kan dus ook een eenvoudig bandfilter
gebruikt worden. De afregeling kan gebeuren op een
maximaal uitgangssignaal van de demodulator.
Dan ~omen we nu toe aan de eigenlijke PLL. Hiervoor
zal een tweede orde 'high gain loop' gebruikt worden,
zodat de dempingsfaktor en de lusbandbreedte afzonderlik
gekozen ~unnen worden. Voor de keuze van de laatste
parameter moet een compromis gezocht worden tussen de
thermische ruis en de faseruis van de draaggolf. Een
Kleine BL
geeft een goede ruisonderdrukking, maar de Ius
~an door zijn traagheid de fasevariaties van de draag
golf niet volgen.
Om het bovengenoemde compromis te vinden, is het
nodig om de faseruis precies te quantificeren.
Dit is nog weI mogelij~ voor de Doppler-shift in het
geval van satelliet-communicatie (zie ref. [12] App B)
De instabiliteiten van oscillators en VCD's zijn echter
mindel' eenvoudig te berekenen en dit kan leiden tot een
~euze van BL
, die vervolgens in de praktijk niet
optimaal blijkt te zijn. (zie ref. [leI])
'78

In sommige gevallen wordt de verkleining van BL
inderdaad beperkt door de faseruis, maar vaker zal het
acquisitie-gedrag van de PLL de beperkende faktor
vormen. Een belangrijke grootheid in dit verband is het
vanggebied van de PLL; dit is het maximale verschil
tussen ingangs- en VCO-frequentie waarvoor nog snelle
acquisitie - binnen periode van het verschilsignaal -
mogelijk is.
De acquisitie-tijd binnen het vanggebied is behalve
van de loop-SIN en het aanvankelijKe trequentie- en
faseverschil, ook afhankelijk van BL
. Goldman toont in
ref. [13] met computersimulaties aan dat deze acqui
sitietijd in de ordegrootte van 10/BL
is. In deze tijd
worden 10/BL
T bits verstuurd, die dus niet ontvangen
worden. Een bericht moet daarom voorafgegaan worden door
een zgn. 'preamble' met 10/BL
T loze bits. Om deze
preamble in lengte te beperken is het niet verstandig
BLT te klein te kiezen; voor een waarde van 0.01 is al
een preamble van 1000 bits nodig.
De bovengrens van BLT wordt in ons systeem vooral
bepaald door de breedte van het gat in het spectrum.
Als het lusfilter te breed is, gaat de modulatie, die
niet door het piloottoonfilter is verwijderd, als
storing optreden.
Bij wijze van compromis tussen al deze effecten, zal
voor een lusbandbreedte van 10 kHz gekozen worden.
Als de snelheid van de Ius minder belangrijk is, kan
BL
nog enigszins verkleind worden; bij een bitsnelheid
van 1 Mbits/s en de daarbij behorende breedte van het
gat in het spectrum kan de lusbandbreedte echter
nauwelijks groter gemaakt worden.
Het laatste onderdeel van fig. 31 dat nog besproken
moet worden, is de coherente demodulator. Deze vermenig
vuldigt het signaal eenvoudigweg met de teruggewonnen
draaggolf en levert het datasignaal af aan de basisband-
ontvanger.
?9

Tot slot van deze paragraaf is in fig. 32 de al
eerder genoemde alternatieve uitvoering van het PLL
circuit getekend, waarbij de limiter is vervangen door
een AGC. Dit principe biedt in ons systeem bijzondere
voordelen omdat uit het gemoduleerde signeal met draag
golf-pi loot zeer eenvoudig een regelsignaal voor deze
AGC is af te leiden. In het uitgangssignaal van de
demodulator is deze piloot namelijk aanwezig als een
DC-component. Zoals te zien in fig. 32 is ook geen
piloottoonfiltc.' me~r nodig vanwegE het ontbreken van de
limiter.
t------'l PLL
[f X,r
T damo..... l.. l:.ot
LPF "'
Fig. 32. Draaggolfterugwinning met coherente AGC
In deze configuratie worden wel zeer hoge eisen
gesteld aan de lineariteit van de fasedetector; niet
lineariteiten in dit element veroorzaken gegarandeerd
AMjPM-conversie in het sterk amplitude-gemoduleerde
signaal.
80

-; e t v 0 0 I' 1.1 eel v d n I] e z e I,' 0 r m van A;::; C, c i ewe] c () 'l ere n t e
'-I GC g "" ,-, 0 e md w0 r- d t ! z j e r l:o f, [8 ] ), i '3 d e '3 n e 1 h e i ,j wa arm e e
amplitude-varidties gevolgd ~unnen worden; hel regel
signaal wordt weI door een laagdoorlaatfilter geleid,
maar dit dient aIleen om het datasignaal weg te filte
ren, Het nadeel is dat de AGe 'in lock' moet komen en
tevens het in lock Kamen van de PLL be!nvloedt, doordat
bij acquisitie het signaalniveau nag niet constant is.
Vanwege deze nadelen is gekazen vaal' de conventionele
uitvoering van fig. 31.
5,4. Implementatie van modulator en demodulator
De schema's van de modulator met bijbehorende
circuits zijn te vinden in Appendix 3.1.
Het premadulatie-filter is opgebouwd met breedbandige
aperatianele versterkers, terwijl vaal' het pastmadu
latie-filter parallelresonantiekringen met transistoren
zijn gebruikt. De Q-faktar van deze filters is vast
ingesteld met parallelweerstanden. Hierbij maest van
zelfsprekend ook steeds de ingangsimpedantie van de
valgende trap meegenamen worden.
Beide filters worden m.b.v. emittervalgers ap een
uitgangsimpedantie van 50 SL gebracht.
De eigenlijke modulator bestaat uit een zgn. dubbel
gebalanceerde diaderingmixer van het type SBL-1, waarvan
de apbauw in fig. 33a getekend is (zie ook ref. [15]).
De ingangen en uitgangen van dit element zij aange
past voor een 50 .n. -systeem. De LO-ingang wordt aange
stuurd door de externe 70 MHz kristaloscillator met een
vermogen van +10 dBm. Dit niveau is van be lang in ver
band met het relatieve niveau van de draaggolfpiloot,
dat overigens met P1 ingesteld kan worden. Het niveau
va~ de draaggolf moet hoag genoeg zijn om de diodes in
de mixer aan te sturen.
81

Q.
o.r:
I lK RESISTOR I-...I """'IIiI~
-90 t
1\\ !
'III o RF PHASEANGLE
-~\ ! I
i \.9(l
SV 51C,"lAL VOL T5" -sv
b.
Fig. 33 a. Opbouw van de dubbelgebalanceerde diodering-
mixer (zie ref. [15]). b. Karakteristiek
van de IF-poort (zie ref. [14])
Zoals te zien in de karakteristiek van de mixer van
fig. 33b is de fase-versus-ingangsspanning van de IF
ingang aIleen lineair voor Kleine ingangsspanningen.
Het niveau van het gefilterde datasignaal wordt daarom
beperkt tot ongeveer 0.5 Vtt
.
Het schema van de mengtrap die het signaal rond ?~
MHz naar 5 MHz transformeert, is te vinden in App. 3.2.
De 75 MHz kristal-oscillator is een zgn. Butler emitter
volger oscillator; dit type oscilleert stabiel en is ook
te gebruiken met overtone-kristallen. Met C1 is de
frequentie op exact 75.0 MHz af te regelen. Met behulp
van een emittervolger wordt het oscillatorsignaal
aangepast op de 501l-ingangsimpedantie van de mixer.
Het uitgangsniveau van de oscillator is ongeveer +7 dBm.
De vermenigvuldiger is weer uitgevoerd met een SBL-1
dioderingmixer. Deze wordt gevolgd door een passief
laagdoorlaatfilter voor de onderdrukking van de meng
produkten. Het gefilterde signaal wordt daarna versterkt
en gebufferd.
82
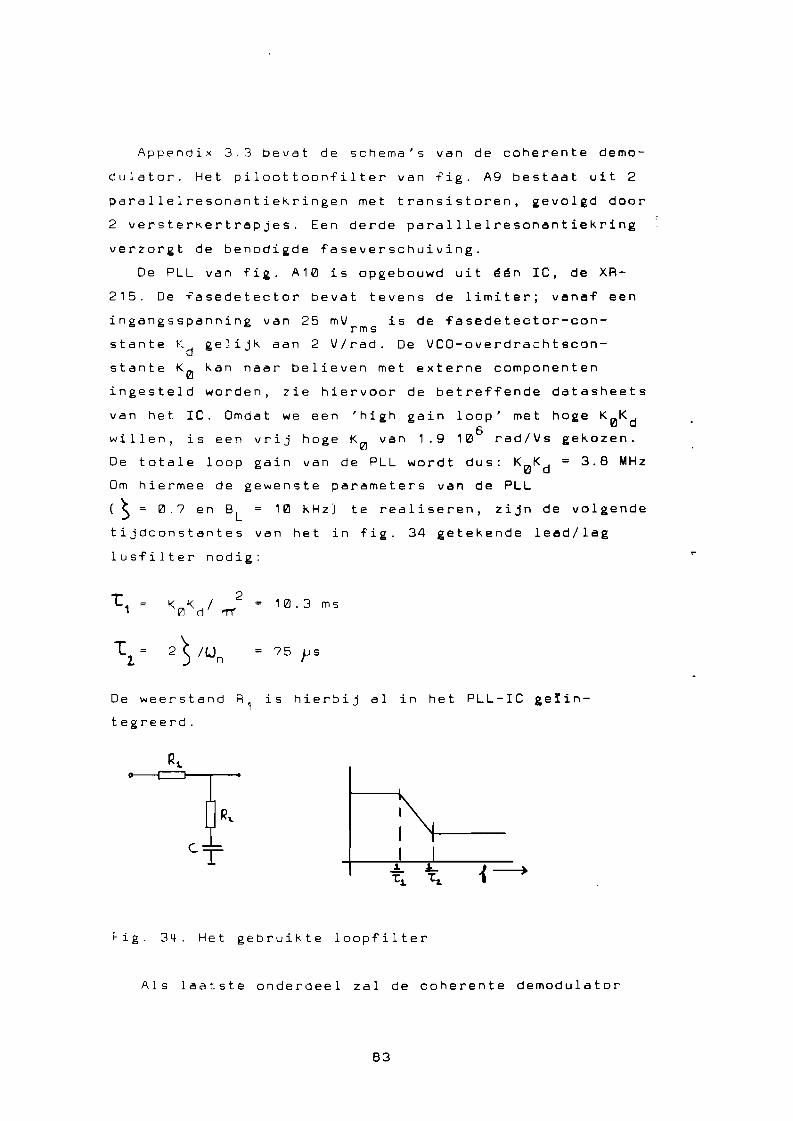
Appendix 3.3 bevat de schema's van de coherente demo-
dulator. Het piloottoonfilter van fig. A9 bestaat uit 2
parallelresonantiekringen met transistoren, gevolgd door
2 versterkertrapjes. Een derde paralllelresonantiekring
verzorgt de benodigde faseverschuiving.
De PLL van fig. A1~ is opgebouwd uit ~~n IC, de XR
215. De fasedetector bevat tevens de limiter; vanaf een
ingangsspanning van 25 mV is de fasedetector-con-rms
stante r.d
gelijk aan 2 V/rad. De VCO-overdrachtscon-
stante K~ kan naar believen met externe componenten
ingesteld worden, zie hiervoor de betreffende datasheets
van het IC. Omdat we een 'high gain loop' met hoge K0
Kd
6willen, is een vrij hoge K~ van 1.9 1~ rad/Vs gekozen.
De totale loop gain van de PLL wordt dus: K0
Kd
= 3.8 MHz
Om hiermee de gewenste parameters van de PLL
(S = 0.7 en BL
= 10 kHz) te realiseren, zijn de volgende
tijdconstantes van het in fig. 34 getekende lead/lag
lusfilter nodig:
T,
L =1
1~.3 ms
75 jJ s
De weerstand R1
is hierbij al in het PLL-IC geiin
tegreerd.
Fig. 34. Het gebruikte loopfilter
Als laatste onderdeel zal de coherente demodulator
83

van Fig. All worden besproken. Ook deze is opgebouwd uit
e~n enkel IC, de LM 1496. Dit is een zgn. dubbel
gebalanceerde modulator/demodulator en is qua werking
vergelijkbaar met de dioderingmixer. Het voordeel van
het IC is dat het draaggolfvermogen minder hoog hoeft te
zijn. Bij het gebruikte draaggolfvermogen en de toege
paste collectorweerstanden is de 'conversion gain',
de verhouding tussen de ingangsspanning (rond 5 MHz) en
de gedemoduleerde uitgangsspanning, gelijk aan 0.9.
Na buffering van het gedemoduleerde signaal met een
emittervolger is dit klaar om toegevoerd te worden aan
de basisband-ontvanger.
84

6; - .----"---_._-
:, rloofjstu~, _' is reeds een serie meetr'esultaten van
dE MLSE-decoder gepresenteerd, In dit hoofdstu~ zullen
een aanlal P -versus-E IN~-metingen van de modem in zijne b <J
geheel worden beschreven.
Het feit dat aan de zendkant een lineaire modulator
is toegepast, maakt een eenvoudige methode van ruistoe
voeging mogelijk. In de conventionele methode wordt ruis
bij het signaal opgeteld aan de ingang van de ontvanger.
Omdat de spectrale dichtheid van dat signaal rond 70 MHz
geconcentreerd is, moet de ruis zich ook in een band
rond deze frequentie bevinden. Praktische ruisgener~to
ren produceren echter een ruisspectrum dat slechts vlak
is van 0 tot enkele tientallen MHz. Het uitgangssignaal
van de ruisgenerator wordt daarom in frequentie omhoog
getransformeerd, door het te mengen met een hogere
frequentie. Deze mengfrequentie moet voldoende ver
verwijderd zijn van 70 MHz om geen storing te veroor
zaken. In de praktijk zal het nodig zijn om de ruis aan
de uitgang van de mixer nog te filteren vanwege de in
deze mixer geproduceerde intermodulatie-vervorming en
harmonischen van de mengfrequentie.
Zoals reeds gezegd is in ons geval een eenvoudiger
methode te gebruiken; de ruis kan namelijk v66r de
modulator toegevoegd worden. Het omhoog mengen en filte
ren van de ruis gebeurt dan automatisch in de modulator.
Deze methoae van ruistoevoeging is aIleen bruikbaar als
aan de ingang van de ontvanger de ruis in een voldoende
groot frequentiegebied rond 70 MHz wit is. Metingen van
het ruisspectrum na de modulator tonen aan dat dit
inderdaad het geval is.
Op Dasi~ van deze methode van ruistoevoeging in de
zendel' is een opstelling voor BER-metingen gebouwd,
waarvan het blokschema in fig. 35 getekend is.
85
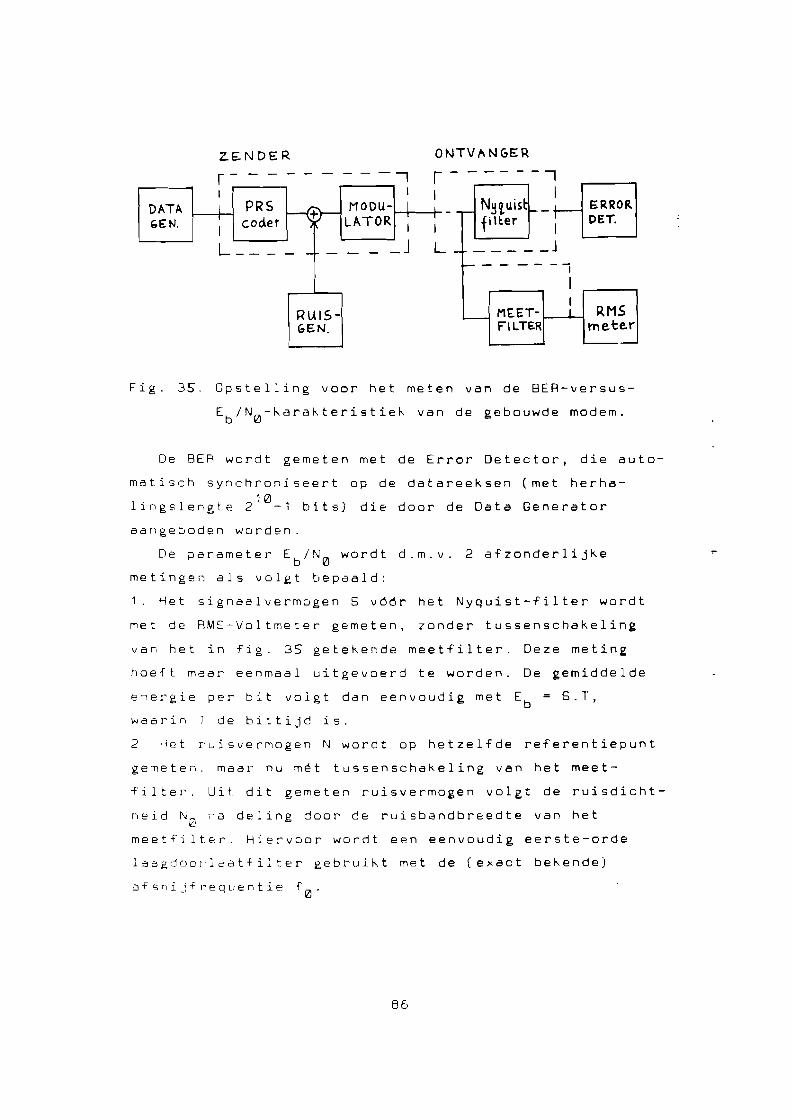
ONTVl\NGER
ERRORDET.
-,II
ME.ET-I--~ RM5FILTER mete.r
---,,..-----, IN~iUisfil~er I
- - - __ JL
Z.E:.NDER
r-----------,I I I
DATA I PRS -(£)- MOOU- IGEN. co~er LATOR I
I I I
L ___ - - ____ J
RUIS-GEN.
Fig. 35. Opstelling voor het meten van de BER-versus
Eb/N0-KaraKteristieK van de gebouwde modem.
De 8ER wordt gemeten met de Error Detector, die auto
matisch synchroniseert op de datareeksen (met herha-. 10
llngslengte 2 -1 bits) die door de Data Generator
aangeboden worden.
De parameter Eb
/N0
wordt d.m.v. 2 afzonderlijke
metingen als voIgt bepaald:
1. Het signaalvermogen 5 v66r het Nyquist-filter wordt
Met de RM5-Voltmeter gemeten, zander tussenschakeling
van het in fig. 3~ geteKende meetfilter. Deze meting
hoeft maar eenmaal uitgevoerd te worden. De gemiddelde
energie per bit voIgt dan eenvoudig met Eb
= S.T,
waarin T de bittijd is.
2 Het ruisvermogen N wordt op hetzelfde referentiepunt
gemeten. maar nu met tussenschakeling van het meet
filter. Uit dit geMeten ruisvermogen voIgt de ruisdicht
heid N0
na deling door de ruisbandbreedte van het
meet~ilter. Hiervoor wordt een eenvoudig eerste-orde
laagdoorlaatfilter gebruiKt met de (exact beKende)
a~snij~requentie f0
.
86
'\ ;., wed e C1 \1 E' r" !''=; c; h t sf \Inc [ i e van he t me e t f i 1 t e r H( f )
" '.: .:c: '" C il, ,j a!l g e ~ ,:; t v 0 0 rile t r u i s v e r m0 g en:
2IH(f)1 df
00
N. J1+[} If .J 2
o
df
( 6. 1)
Hiermee kan Eb
/N0
berekend worden uit de gemeten sig
naal/ruisverhouding:
2N nN
( 6.2)
Het resultaat van de uitgevoerde metingen is te zien
in de grafiek van fig. 36. Als referentie zijn in deze
figuur de idea Ie foutenkromme van BPSK met coherente
detectie en de theoretisch verwachte foutenkromme van
het gebouwde modem geteKend. Bij het construeren van
laatstgenoemde kromme is rekening gehouden met de degra
datie door het gebrui~ van de draaggolfpiloot zie
hdst.S, i.h.b. fig. 26) en de degradatie die wordt
veroorzaa~t door de MLSE-decoder. De laatstgenoemde
degradatie is een verhoging van de foutenkans met een
faktor 4 bij hoge Eb
/N0
.
van de MLSE-decoder niet
Bij lage Eb
/N0
is de prestatie
exact berekendj voor het
constl'ueren van de verwachte foutenkromme in dit gebied
is daarom uitgegaan van de simulatieresultaten van
hoofd3tul<.3.
Omdat vermoed werd dat het meest kritische gedeelte
van ~e modem de klokterugwinning is, is een identi.ke
serie metingen uitgevoerd met de klokken van zender en
ontvanger doorverbonden. Ook de kromme die uit deze
87

'T, "" L i-, ~; t:; ,-, i; g e I~ (J II 's t rue e r- C), i s t e v i n dell i II f' i g, 3 6 ,
0,5 Gl'
1. Ideale foutenkromme van BPSK
met coherente detectie.
2. Verwachte kromme voor de
gebouwde modem.
3. Gemeten BER bij ideale
klokterugwinning.
BEG van de complete modem.
1,
DRAAGGOL F P ILOOT
bL; T ::: 0,01..
1.0·!>'~I--"""--'-""",--,-""""---.-...,....---r-...,.....L......L....,.J...L.,.------
-41.0
o
-310
_So
iO
~ iBERI
--i!S -h, ::-'''~ulL:Jat "M,-' ,je BlCR-metingen met de complete
modem_
88

C 0 r\l C L U:; I c: S EN AANBEVELINGEN.
Uit de meetresultaten van hoofdstUK 6 kan gecon-
vande verwachte PeT.o.v.
2.2 dB heeft voor Pe
ideale coherente detectie.
cludeerd worden dat de modem een E /N~-degradatie van-4 b '"
10 vergeleken met BPSK met
het gebouwde systeem treedt nog een degradatie van 1.0
dB op.
Zoals de BER-metingen met doorverbonden zender- en
ontvangerklok aantonen, is de degradatie voor een groot
deel te wijten aan de niet-ideale klokterugwinningj bij
een ideale referentie-klok in de ontvanger is de degra--4
datie bij een foutenkans van 10 verminderd tot 0.5 dB.
De al eerder genoemde 'data aided'-techniek voor de
klokterugwinning zou gebruikt kunnen worden om het
systeem op dit punt te verbeteren.
De resterende degradatie van 0.5 dB is waarschijnlijk
voor een gedeelte te wijten aan fasevervorming in het
ontvangfilter. Het oogpatroon na het Nyquist-filter
blijkt namelijk enigszins scheef te zijnj het meest
gunstige samplemoment ligt niet op het punt midden
tussen de nuldoorgangen waar de signaalamplitude het
grootst is. Om hier verbetering in te brengen zou het
Nyquist-filter uitgebreid kunnen worden met groepsloop
tijd-correctie.
Verder verdient het zeker aanbeveling om het beschre
ven principe van coherente AGC in de praktijk uit te
testen, omdat het enkele grote voordelen biedt boven het
conventionele systeem. In de eerste plaats kan het
benodigde drempelniveau voor de decoder eenvoudig uit
het regelsignaal van de AGC afgeleid worden. Verder
wordt door toepassing van dit systeem de modem veel
beter geschiKt voor kanalen met sterke 'fading'. Het
laatste voordeel van de coherente AGC is, dat het
kritische piloottoonfilter niet meer nodig is.
89

8m de spectrale effici~ntie van de modem te verbe-
teren, zou modified duobinary codering in plaats van
dicode gebruikt kunnen worden. De decoder voor dit
systeem moet dan bestaan uit 2 parallel werkende 1-0
decoders.
Een tweede interessante mogelijkheid voor het
verkrijgen van een hogere spectrale effici~ntie is
enkelzijband-modulatie van het dicode-signaal. Vanwege
het nulpunt voor de draaggolffrequentie na modulatie is
het uitfilteren van ~~n zijband mogelijk met praktische
filters. In ret. [17J wordt een modem beschreven dat
gebruikt maakt van dit principe.
De moeilijkheden met het terugwinnen van het kIok
signaal bij de ontvanger kunnen worden vermeden door als
draaggolf een harmonische van de klokfrequentie te
gebruiken. Lender beschrijft in ref. [16] een modem
waarin de draaggolffrequentie geIijk is aan de kIok
frequentie, en waarin als gevolg daarvan de draaggolf
piloot met geheel digitale middelen aan het gemoduleerde
signaal kan worden toegevoegd.
Afgezien van het gebruik voor plaatsing van een
draaggolfpiloot wordt PRS ook gebruikt als middel om de
spectrale effici~ntie van overigens conventionele BPSK
modems te verbeteren; dit gebeurt dan vaak d.m.v. duobi-
nary codering met F(o) + o.Met enkele wijzigingen in de metric ~ is de in hdst. 3
beschreven MLSE-decoder oak voor de decodering van
duobinary bruikbaar.
Voor basisband-transmissie wordt ook vaak gebruik
gemaakt van pseudo-ternaire codering. De bekende AMI- of
bipolaire code komt overeen met differentieel gecodeerde
1-0. Ook voor de decodering van deze code
schreven MLSE-decoder zijn nut bewijzen.
90
kan de be-

L1TERATUUR:
[1] Shanmugan K.S., 'Digital and Analog Communication
Systems', New York: John Wiley & Sons, 1979.
[2] Feher K., 'Digital Communications: Satellite/Earth
Station Engineering', Englewood Cliffs:
Prentice-Hall lnc., '983.
[3] Kabal, Pasupathy, 'Partial Response Signalling',
IEEE Transactions on Communications, Vol. COM-23,
pp 921-934, September 1975.
[4] Forney G, 'Maximum-Likelihood Sequence Estimation
of Digital Sequences in the Presence of Intersymbol
Interference', IEEE Transactions on Information
Theory, Vol. 1T-18, pp 363-376, May 1972.
[S] Kobayashi H, 'Application of Probabilistic Decoding
to Digital Magnetic Recording Systems', IBM Journal
of Research and Development, Vol. 1S pp 64-74,
January 1971.
[6] Ferguson M, 'Optimal Reception for Binary Partial
Response Channels', Bell Systems Technical Journal,
Vol. S1, p 493-SelS, Feb 1972.
[7] Kobayash H, 'Correlative Level Coding and Maximum-
Likelihood Decoding' IEEE Trans. on Information
Theory, Vol. 1T-17, pS86-S94, sept 1971.
91

C8] Gardnel' F.M., 'Phaselock Techniques', 2nd Edition,
New York: John Wiley G Sons, 1979
[9J Viterbi A.J., 'Principles of Coherent Communications',
New York: McGraw-Hill, 1966.
[10J Nagelhout J Th, 'Een 8.448 Mbitjs QPSK-modem voor beeld
telefonie-experimenten via communicatiesatellieten',
Afstudeerverslag TH Eindhoven, 1983.
[11J AI-Nasser F, 'Tables shorten design time for active
filters', E:ectrQnics Magazine 800ks: Active FilLers,
New York: McGraw-Hill, 1980.
[12J Arnbak J C, 'Digital Transmission Systems',
College-syllabus TH Eindhoven, 1984.
[13J Goldman 'Second-order phase-locked loop acquisition
time in the presence of narrow-band Gaussian noise',
IEEE Trans. Comm. Vol. COM-21, p29?-300, April 19?3.
[14J Andren C, 'PSK sidebands reduced by premodulation
filtering', Microwave Journal, Vol. 21, no 2, Jan 19?8.
[15J Mini-Circuits, 'Get The Most From Mixers',
Application Notes, Mini-Circuits Laboratory
[16J Lender, 'Correlative Data Transmission with Coherent
Recovery Using Absolute Reference', IEEE Trans. Comm.
Techn., Vol. COM-16, p 108-115, Feb 1968.
[17J Fripiat J.M. 'Synchronous modems for data transmission
on a group band circuit', Philips Telecommunication
Review, Vol. 33, No.2, p 68-85, 19?5.
92

APPENDIX 1: BESCHRIJVING VAN DE SIMULATIEPROGRAMMA'S
In fig. A1 en A2 zijn de flow charts van het
Ferguson- resp. het Forney-algoritme getekend.
Van elk algoritme zijn een aantal programma-versies
gemaaKt, maar de basisstructuur is steeds hetzelfde.
AIle programma's bevatten behalve de decoder oak nag de
encoder en het kanaalj deze zijn niet in de flow ch~rts
opgenomen. Verder wordt in de programma's het aantal
fouten berekend, waarvoor het nodig is oak de ingangs
bits ~~ een register te vp.rtragen. Als pul~niveau's van
het driewaardige datasignaal is steeds -2, 0 en 2
genomen, i.p.v. -2A, 0 en 2A zoals in het voorafgaande.
Bij het invoeren van de gevraagde standaarddevi~tie v~n
de kanaalruis moet hiermee rekening gehouden worden. d
kan omgerekend worden naar de signaalruisverhouding met
de formule SIN = 2/~. In de zgn. 'trace-mode' maken de
programma's in elke slag van het algoritme een aantal
variabelen zichtbaar. De namen hiervan corresponderen
met de in het voorafgaande gebruikte namen. Zo staat ZK
voor zk en YHK voor Yk .
Als voorbeeld zijn achter in deze appendix na de
flowcharts de listings van de programma's DICODE,
FERGUS02 en FORNEY2 afgedrukt. AIle programma's zijn
vanzelfsprekend oak op schijf opgeslagen, samen met een
aantal hulpbestanden voor het compileren en linken.
De programma's zijn geschreven in Pascal voor gebruik
op een MS-DOS computer. Voor aIle programma's geldt dat
ongeveer 100.000 bits per uur kunnen worden gesimuleerd.
De snelheid wordt daarbij vrijwel geheel bepaald door de
random number generators. Deze bestaan uit 3 procedures
uit een FORTRAN-bibliotheek met numerieke routines
(NAGLIB)
De routine G05CAF genereert een getal tussen 0 en .,
met een uniforme verdeling. Door deze waarde af te
93

ronden, ontstaat een geheel getal met de waarde 0 of 1.
De routine G05DDF levert een normaal verdeelde waarda
met een gegeven gemiddelde en standaardafwijking.
De routine G05CBF dient am de beide andere routines te
initialiseren. Bij het aanroepen van G05CBF moet een
startwaarde gespecificeerd worden. Deze startwaarde moet
bij het draaien van het programma ingegeven worden.
Bij gelij~2 stertwaarde wordt een identieke ra&ks bits
en ruissamples gegenereerd.
Het gebruiken van een FDRTRAN-bibliotheek in een
Pascal-programma is in dit geval mogelijk omdat de
compilers van dezelfde fabrikant zijn. (MicroSoft)
Deze heeft voor beide compilers identieke datastructuren
etc. gebruikt, zodat compilanden van beida compilers
gecombineerd kunnen worden. Er zijn echter weI
verschillen m.b.t. de parameter-overdracht in Pascel en
FORTRAN. De laatste kent aIleen 'call by reference' en
gebruikt bovendien 32-bit edressen. Dit komt overeen met
de zgn. VARS-parameters van Pascel.

ini tialisatie
vo~endsample
DELTA= ~K + 1
N
+ MERGE:
.J
- MERGE
DELTA: = ZK-l DELTA := z'K+ 1
P:::.P+1.
N
c.ornple.me.nlee..r bilso ~ P in b~Het"
5chuif bi-lS·., bl.l1~r 1 plQQl:.st'\QC.\t I"ecilt:.s. bit. () '.= 5.9 n(OELTA)
Fig. A1: Flowchart van het Fergu50n-algoritme

NEE
~u{;; or ffa.. ts PHltJ~ --, rUt lIelltn)
comple.rne.nteel'"buHc.r van bil:. 0
t."," PMIN
N
J
NHAX = PHAX=O Jetit- htJC tt"eVt r",thlc =1.
NEe;.
JA
"NHIN := ~k
PHrN: =0
Fig. A2: Flowchart van het Forney-algoritme
96
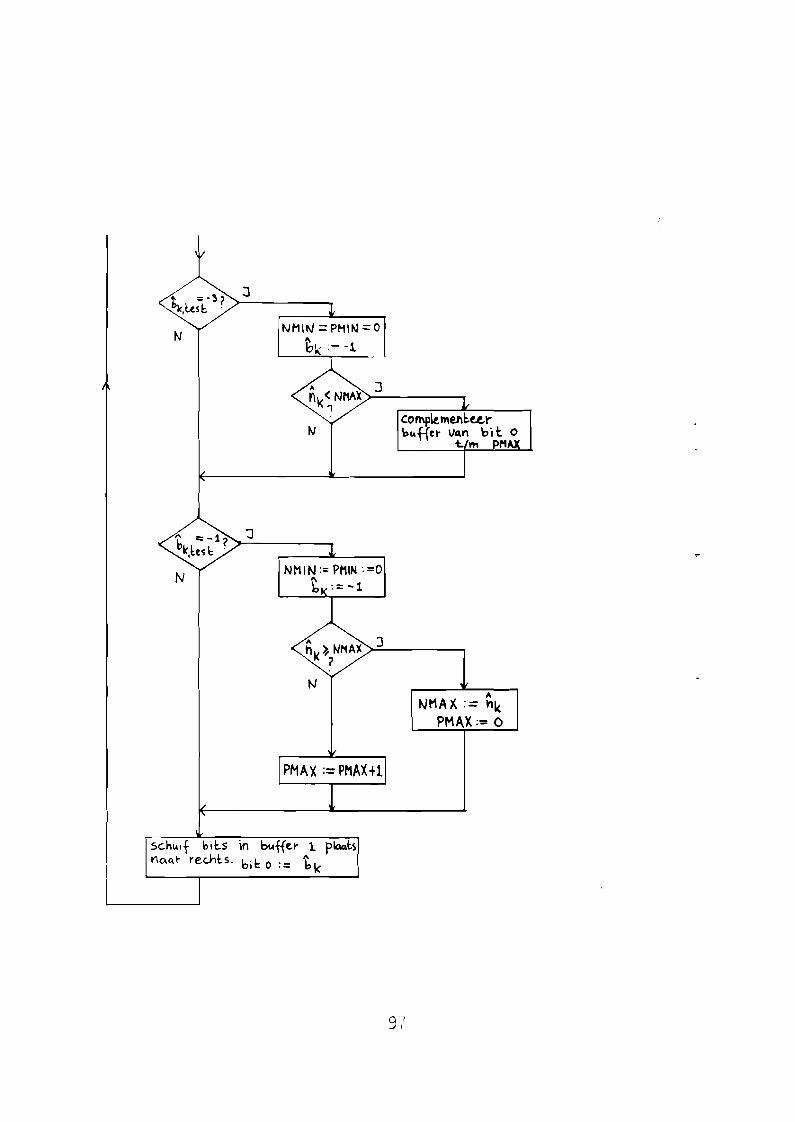
'" -=. ~ 7 >-::1 ...bk,us~ .
N
N
NM1N =PHIN :: 0o!\ok :-,.-1
J
NI1IN:= PMIN : =0~b :=-1
J
NA
NI1AX := "'kPMAX:= 0
SChl.lif bil:.s in buffer 1 placltsnc\C•. 1- rec..hts. bit 0:= t k
9.'

LISTING VAN HET PROGRAMMA DICODE(bit-voor-bit decoder)
PROGRAM OICOOE (INPUT. OUTPUT) ;
VARRUNS. J. ERRORS, START: INTEGER;BPRUN. I : INTEGER4;BERJ, BER. DUMMY. GIGMA. MEAN: REAL;NOW STRING (11);TRACE CHAR; {hulpvariabelen}
XK. YK.P~.cKMIN1.PKMIN2.BK.BKMIN1.BKMIN2 INTEGER;{variabelen zender}
ZK : REAL;
XHK. YHK : INTEGER; {variabelen ontvanaer}
PROCEDURE G05CBF (VARS A : INTEGER); EXTERN;FUNCTION G05CAF (VARS B : REAL) :REAL; EXTERN;FUNCTION G0500F (VARS A:REAL; VARS B:REAL) :REAL;EXTERN;PROCEDURE TIME (VAR S:STRING) ;EXTERN;
BEGIN {MAIN PROGRAM}
BER :. 0;DUMMY:· 0;MEAN :. 0;PKMIN1 0;BKMIN1 :. -1;
WRITELN ( 'SIMULATION OF BIT-BY-BIT PARTIAL RESPONSE CODEC');WRITELN;WRITE ( 'Number of bits per run: ') ;READLN (BPRUN);WRITE ('Number of runs: ');REAOLN (RUNS) ;WRITE ( 'Standard deviation of channel noise : ');READLN (SIGMA);WRI TE ('Stert number (inteaer) :');REAOLN (START);WRITE ( 'Trace mod .. (Y IN) :');REAOLN (TRACE);WRITELN;
TIME (NOW);WRITELN ( 'TIME IS ',NOW);WRITELN;
WRITELN (WRITELN;
RUN NO OF ERRORS BER ') ;
G05CBF (START); {INITIALISEER RANDOM NUMBER GENERATORS}
FOR J :. 1 TO RUNS 00BEGIN
IF (TRACE· 'Y') OR (TRACE· 'y')THEN WRITELN ( , XK YK ZK
98
YHK XHK') ;
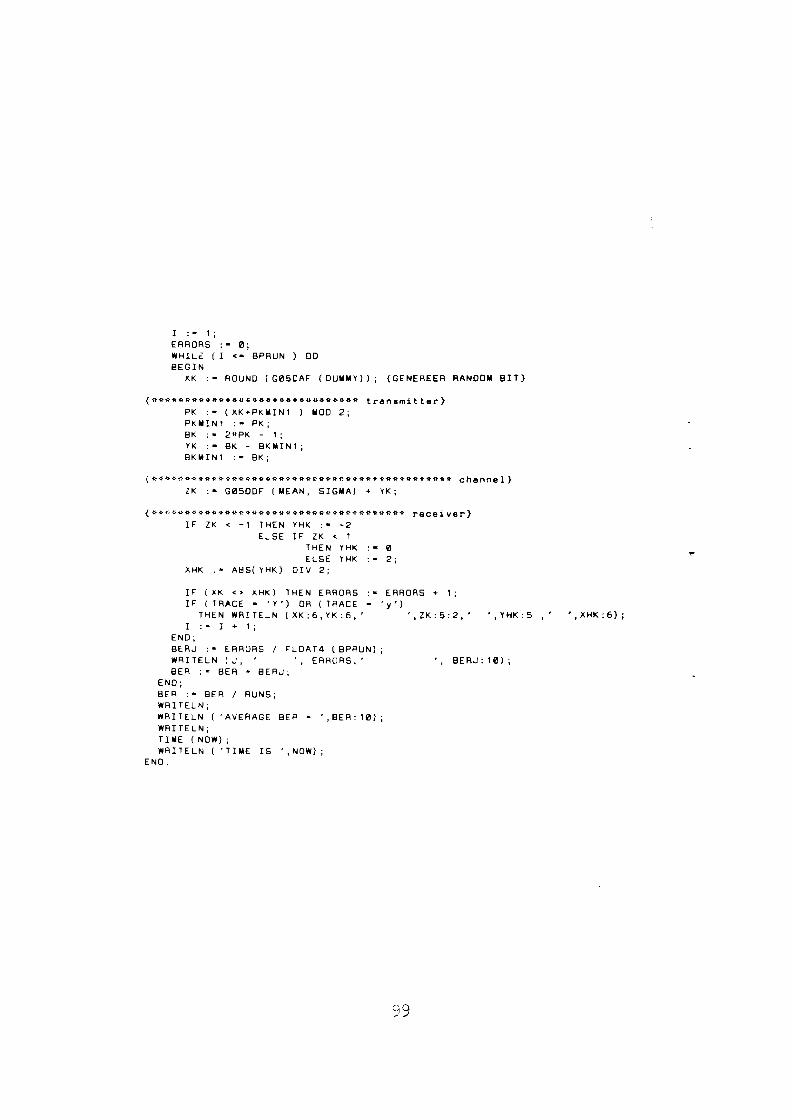
I :. 1;ERRORS :- 0;WH1Li:: (I <- BPRUN ) 00BEGIN
XK : - ROUND (G05CAF (DUMM Y) ) {GENEREER RANDOM BIT}
{***~~~~*o~****~o*o*************tr~nsmitter}
PK :- (XK+PKMIN1 ) MOD 2;PKMIN 1 :. PK;BK :. 2"PK - 1;YK ;- BK - BKMIN1;SKMIN1 ;. BK;
{**************~**~******~********************ch~nnel}
ZK ;. G050DF (MEAN, SIGMA) + YK;
IF ZK < -1 THENELSE
XHK • ASS( YHK)
YHK :. -2IF ZK < ,
THEN YHKELSE YHK
DIV 2;
o2',
BERJ:10)
',XHK:6);" YHK: 5 "',ZK: 5: 2,
IF (XK < > XHK) THEN ERRORS :. ERRORS + ';IF (TRACE - 'Y') OR (TRACE - 'y')
THEN WRITELN (XK:6,YK:6,':. I + 1;I
END;BERJ :. ERRORS / 'LOAT4 (BPRUN)WRI TELN (J, " ERRORS.'BER :. BER + BERJ;
END;SER :. BER / RUNS;WRITELN;WRITELN ( 'AVERAGE BER • ',BER: 10)WRITELN;TIME (NOW);WRITELN ('TIME IS ',NOW)
END.
99

LISTING VAN HET PROGRAMMA FERGUS02(Ferguson-decoder zander precuding)
PROGRAM FERGUSON (INPUT,OUTPUT);
VARRUNS, J, ERRORS, START: INTEGER;BPRUN, I : INTEGER4;BERJ, BER, DUMMY, SIGMA, MEAN: REAL;NOW STRING (11);TRACE CHAR; {hulpv&ri&belen}
XK, XKOELAY, YK,BK,BKMIN1
ZK : REAL; {k&n&&l}
INTEGER;{v&ri&belen zender}
XHK. YHK
XHPDELTAA, NLENTEST
x
TNrEGER; {v&ri&belen cntv&naer}
ARRAY [0 .. 24] OF INTEGER;INTEGER;REAL;INTEGER;INTEGER;REAL; {v&ri&belen voor Ferauson-&laoritme in ontv&naer}
ARRAY[0 .. 24] OF INTEGER;{Extr& schuifreaister om ook de input bits te vertr&aen}
PROCEDURE G05CBF (VARS A : INTEGER); EXTERN;FUNCTION G05CAF (VARS B : REAL) :REAL; EXTERN;FUNCTION G0500F (VARS A:REAL; VARS B:REAL) ;REAL;EXTERN;PROCEDURE TIME (VAR S:STRING);EXTERN;
BEGIN {MAIN PROGRAM}
MEAN :. 0;BER ;. 0;DUMMY :- 0;BKMIN1 :- ';
WRITELN' ('SIMULATION OF FERGUSON MLSE-ALGORITHM');WRITELN ( 'NO PRECOOING ') ;WRITELN;WRI TE ('Shift reaister lenath (m&x 25) ') ;REAOLN [LEN);
P : - - 1 ;FOR N :- 0 TO LEN DOBEGIN
XH[ N) 0;X[ N] : - 0;
END; {initi&lis&tie v&ri&belen Ferauson-&laoritme}
WRITE ('Number of bits per run: ');REAOLN (BPRUN);WRITE ( 'Number of runs ');REAOLN (RUNS);WRITE ( 'St&nd&rd devi&tion of ch&nnel noise ');
100

REAOLN (SIGMA);WRITE r 'Start number (inteller) ')REAOLN (START);WRITE ('Trace mode (YIN) ');REAOLN (TRACE); {in de TRACE mode worden input, output}
{en tussentijdse symbolen lletoond voor }{debuillinll en analyserina van het elaoritme}
WRITELN;
TIME (NOW)WPITtLN ( 'TIME IS ',NOW)WRITELN;
WRI TELN (WRITELN;
RUN NO OF ERRORS BER') ;
GI1I5CBF (START) {INITIALISEER RANDOM NUMBER GENERATORS}
'Y ') OR (TRACE • 'y')
RUNS DOFOR J : R 1 TOBEGIN
IF (TRACE =
THENWRITELN ( , XK YK
DELTAZK
TESTPHK' ,
XHKDEL' )I : = 1;ERRORS := 0;WHILE (I <R BPRUN ) DOBEGIN
XK : R ROUND (G05CAF (OUMM Y) ) {GENEREER RANDOM BIT}
{****~'~~*~~i~******06*OO*~O***~**Otr~n6mitter}
BK :. 2*XK - 1;YK := BK - BKMIN';BKIIINl := BK;
{*i~':~'~'~~~~~~*~****O******~****************O**** chennel}2K : = GI1I5DOF (MEAN, SIGMA) + YK;
{*~·~~~{~{~**~o**~**o********************** receiver}IF P = -1
[HEN BEGINP : R 111;OELTA := ZK + 1
END;TEST DELTA - ZK;IF TEST> 1 THEN A :. 1;IF TEST < -1 THEN A 1;
TEST > 1)< - 1 ) DR (
( ( DEL TA > 111 ) AND ( A < 111 ))DR (( 0 ELTA < 111 ) AND ( A > 111 ))
THEN FOR N :. 111 TO P00 XH[ N] :. 1 - XH[ N] ;
IF (TESTTHENBEGIN
IF
1 O~

',ZK:5:2,' ',XH[0l:5,',TEST:5:2,' ',XHK:6);
THEN WRITELN (. X')ELSE WRITELN
DELTA :~ ZK + A;p :~ 0
ENDELSE P P + 1;
XHI( XH [LEN - 1];FDA N :~ LEN - 1 DOWNTO 1
00 XH [N] XH [N - 1];"r "ELTA , 0 THEN XH [0] 0ELSE XH [0] : - 1;
{~****~****~~****&**********~********••• end receiver}
XKDELAV :- X[LEN - 1];IF (xKOELAV <> XHK) THEN ERRORS :- ERRORS + 1;
{OaK de input bit. moeten vertraaid worden}FOR N :~ LEN - 1 OOWNTO 1
DO X[ N] X[ N- 1 J ;x[ 0] : ~ XK;
IF ((TRACE ~ 'V') OR (TRACE - 'y'))THENBEGIN
WRITE (XK:6,VK:6,'',OELTA:5:2, '
IF (XKDELAV <> XHK)
END;I .: I + ';
END;BERJ : ~ ERRORS / FLOAT4 (BPRUN);WRITELN (J, " ERRORS.'BER :~ BER + BERJ;
END;BEA :~ BEA / AUNS;WRITELN;WAITELN ('AVERAGE SER - ',SER: UI)Wl1ITEc.N;TIllE (NOW);WRI TELN ( 'TIME IS ',NOW)
END.
102
BERJ:l");

LISTING VAN HET PROGRAMMA FORNEY2(Forney-decoder zander precoding)
PROGRAM FORNEY (INPUT,OUTPUT);
VARRUNS, J, ERRORS, START: INTEGER;BPRUN, I : INTEGER4;BERJ, BER, DUMMY, SIGMA, MEAN: REAL;NOW STRING (11);TRACE CHAR; (hulpveriebelen)
XK, XKOELAY, YK,BK,BKMIN1
lK REAL; (~eneel)
INTEGER;(veriebelen zender)
XHK, YHK : INTEGER; (veriebelen ontvenaer)
ARRAY [0 .. 24] OF INTEGER;INTEGER;REAL;
BHPMIN,PMAXNMIN,NMAXN : INTEGER;BHK, BHKMIN1, BHKTEST : INTEGER:LEN : INTEGER;NHKTEST : REAL; (veriebelen voor Forney-elaoritme in ontvenaer)
x ARRAY[0 .. 24] OF INTEGER;(E.tre schuifreaister om oo~ de input bits te vertreaen)
PROCEDURE G05CBF (VARS A : INTEGER); EXTERN;FUNCTION G05CAF (VARS B : REAL): REAL; EXTERN;FUNCTION G0500F (VARS A:REAL; VARS B:REAL) :REAL;EXTERN;PROCEDURE TIME (VAR S:STRING);EXTERN:
BEGIN (MAIN PROGRAM)
MEAN := 0;BER := 0;DUMMY := 0;BKMINl :- 1:
WRITELN ('SIMULATION OF FORNEY MLSE-ALGORITHM');WRITELN ('NO PRECOOING');WRITELN;WRITE ('Shift reaister lenath (me. 25) 'J;REAOLN (LEN) ;
BHKMIN1 1 :PMIN 0;PMIN 0;PMAX 0;PM AX 0;NMIN 0;NMIN 0'NMAX 1'1;NMAX .- 0'FOR N 0 TO LEN DOBEGIN
103
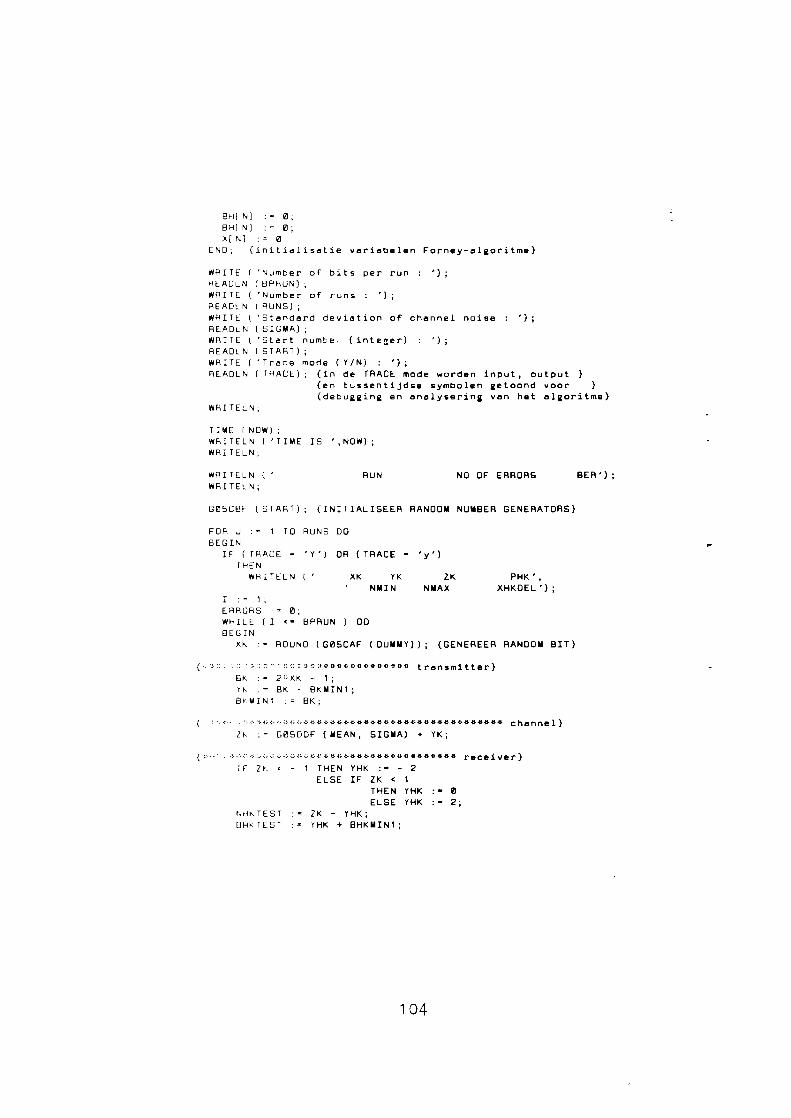
BHI N] ; = 111;BH[ NJ ; ~ 111;X[ Nl ; = 111
END; {initialisatie variabelen Forney-alioritme}
WRITE ( 'Number of bits per run 'J;RlAOLN [BPRUN);WRITE ('Number of runs 'J;REAOLN I RUNS) ;WRITE I 'Standard deviation of channel noise 'JREAOLN (SIGMA) ;WRITE I 'Start numbe, (inteaerJ 'J;REAOLN [START);WRITE ( 'Trace mode (YIN) 'J;REAOLN [TRACE); {in de TRACE mode worden input, output}
{en tussentijdse symbolen ietoond voor }{debuiiini en analyserini van het alioritme}
WRITELN;
rIME [NOW)WRlTELN ( 'T IME IS ',NOW)WRITELN;
WR IT E L N IWRITELN;
RUN NO OF ERRORS BER') ;
GI1I5CBF I START) {INITIALISEER RANDOM NUMBER GENERATORS}
PHK' •XHKOEL') ;
ZKNMAX
, y')
YKNMIN
XK
FOR J := 1 ro RUNS DOBEGIN
IF (rRACE = 'Y') OR (TRACE •[HEN
WRI TELN I'
I : = ';ERRORS ;= 111;WHILE (I <- BPRUN ) 00BEGIN
X~ ROUND CGI1ISCAF (DUMMY») {GENEREER RANDOM BIT}
':*~~" ""* ~~~~~~~~~***~*~oo**~****~ trensmitter}BK 2"XK - I;Y~ BK - 8KMIN1;Br,MIN 1 BK;
··,~~~~:~·*~~~:******~*********o*************chennel}n GI1ISODF (MEAN. SIGMA) + YK;
receiver}1 r ZI<,
r<H~ TESTBHKTEST
THEN YHK ;. - 2ELSE IF ZK < I
THEN YHKELSE YHK
ZK - YHK;YHK + 8HKMIN1;
o2;
104

CASE BHKTEST OF3 : BEGIN
BHK :. 1;NIIAX :. 0;PIIAX :. 0;IF NHKTEST , NllIN
THEN FOR N 0 TO PllIN00 BH( N] - BH( N] ;
NllIN 0;PllIN 0
END;
NHKTEST;o
BEGINBHK :. 1;NIIAX :. 0;PIIAX :. 0;IF NHKTEST <. NllIN
THEN BEGINNIlINPllIN
ENDELSE PIlIN :. PllIN
END;+ 1
- 1 BEGINBHK :. - 1;NMIN :. 0;PllIN :. 0;IF NHKTEST ,. NIIAX
THEN BEGINNIIAX NHKTEST;PIIAX 0
ENDELSE PIIAX :. PIIAX + 1
END;
end receiver}
BEGINBHK :. - 1;NllIN :. 0;PllIN :- 0;IF NHKTEST < NIIAXTHEN FOR N :. 0 TO PIIAX
OOBH(N] -BH(N];0;o
- 3
NIIAXPMAX
ENDOTHERWISE
END;XHK :. ( BH(LEN - 1) + 1) OIV 2;FOR N :. LEN - 1 DOWN TO 1
00 BH( N] :. BH( N - 1);BH( 0) :. BHK;BHKIlIN 1 :. BHK;
{~~~***v*******************************
105

XKOELAY : z X[ LEN - 1];IF (XKOELAY <> XHK) THEN ERRORS :- ERRORS + 1;
{Oo~ de input bits moeten vertr80ad worden}FOR N := LEN - 1 OOWNTO 1
[)O X[ N) X[ N-1] ;xr ill : = XK;
IF (( [RACE z 'Y') OR (TRACE - 'y'))THENBEGIN
WR IT E l XK : 6, YK: 6, ' •• ZK: 5: 2. 'I ( BH[ 0) + 1) OIV 2) : 5 ,
• , Nil IN: 5 : 2, ' , • NIIAX : 5 : 2 •',XHK: 6) ;
IF I nDELAY <> XHK) THEN WRITELN (' X')ELSE WRITELN
END;I I + 1;
END;BERJ : = ERRORS I FLOAT4 (BPRUN);WRlTELN (J, " ERRORS,'BER :. SER + BERJ;
END;BER := BER I RUNS;WRITELN;WRI TELN ( 'AVERAGE SER - ',BEA: HI) ;WRITELN;TIllE (NOW);WRITELN I 'TIllE IS ',NOW);
ENU.
106
BERJ: HI) ;

APPENDIX ~ SIMULATIE- EN MEETRESULTATEN VAN DE DECODER
De simulaties zijn uitgevoerd met de proir~mm~'s
FERGUS02 en FORNEY2, dus zander precodini. De iebruikte
bufferlengte is steeds 12 bits. In de l~~tste kolom
staan de meetresultaten van de metingen die met de
gebouwde 1 Mbit/s Ferguson-decoder zijn uitievoerd.
De theoretische foutenkans bij symbool-voor-symbool
detectie Pe,BIT = 3.QC\fS!2N) is ter verie11jk1ni
toegevoegd in kolom 2, terwijl in kolom 3 de ben~derini
-is vermeld.
voor de foutenkans bij MLSE-decoder1ni P e,MLSE4. Q( \f'S7N)
SER simul~ties
SIN Pe,SITp
e,MLSE FERGUSON FORNEY GEMETEN SER
------------------------------------------------------------5.0 3.2 E-1 1 .5 E-1 7.6 E-2 B. 1 E-2 9.6 E-2
6.0 2.4 E-1 9.2 E-2 5. 1 E-2 5.4 E-2 B.0 E-2
7.0 1 .7 E-1 5.0 E-2 3. 1 E-2 3.4 E-2 4.0 E-2
8.0 1 . 1 E-1 2.4 E-2 1 . B E-2 1 .9 E-2 2.3 E-2
9.0 6.8 E-2 9.4 E-3 6.8 E-3 7.9 E-3 9.0 E-3
10.0 3.8 E-2 3. 1 E-3 2.B E-3 2.6 E-3 3.4 E-3
1 1 . 0 1 .8 E-2 7.8 E-4 7.5 E-4 7.B E-4 1 .0 E-3
12.0 7.2 E-3 1 .4 E-4 1 .4 E-4 1 .4 E-4 1 .5' E-4
13.0 2.4 E-3 1 .6 E-5 2 E-5
14.0 6.0 E-4 1 . 1 E-6 2 E-6
15.0 1 . 1 E-4 3.8 E-8 6 E-B
------------------------------------------------------------
107

-110
SIN In )~B
Pe BIT =3.(Q(V S!z.N'),
je.mel:.en BE R\
Fe"'~\olson - decooe.t
\\
\;\
P b- . \e, IhC.Hr
=<Q (VS/N 'J \
\
\
-S'_+---r-........-r-........-...,.....---..,,.---.---r-...;...,....L...--r--.....--+-.......--10
-l10
Fig. A3. BER als functie van SIN voor de Ferguson
decoder vergeleken met de foutenkans veer
binaire basisbandtransmissie.
108

APPEcNLJIX 3: BESCHRIJVING VAN DE MODULES.
A3. 1. Encoder en modulator .
..IC.L 0 CKI
no) = 1. - 0"D ~ P ~ 0 ~ -
IDATAl SR l-D=1 ~dH
SR = 'll.l LS" :1.j~
N1, N2.. ::. Vlt 14-LS&b
Ns- :- 1(4 T~ LSl1.b
Tl :: 2.N3~Ott-
o=1
Nl.
5V
~ \n.3Qn~S - e.n uit~Qn!~s·l~nQ'en
V Qh ""ocl",les wcnd&" ~e me. t-kl;",a,t •• " red,t."•• k·
Fig. A4: Schema van de encoder
500.11.
VanGO<lu
A'1.,A1- = LH?l'il
sociI10k
500
T,500
660+1l0P
6S" P6s pF
510
+ 11.. V
Fig. AS: Premodulatiefilter
Hl9

11<' NHc. '4rr\~r I(ex-te... ne. kl'"isb>.losc..\ 11Q.t.ot")
P1. ~ns-le..ll in~ telQ.tie.Ve. s-t\!.rkk 'J/J. pi loottoot1
T1., Tl. V<..rschl.\ivin~ {liter kO\ \"0. k-be.Hst-ie.k
ltV ltIL
I330 'If
12..s- HHl.Pl2.0 k
~ Kb ,go
4kJII="
SP>L RF'2. N 3304-
GEFllT£1
13kOATA- LO sL 2.hS."NAAL 3~O
T1,.,.1)<:.
):
C"
;::()
DCI-'
OJr'[J
""l
ro:J
'00
-" til-" rT
0 30Q
CI-'
OJrTf-'.
roI
-+,f-'.
I-'
rT
ro.,

TI.."
IJQ
I~
'8~+12.
~ 1.2-
...1 lNIf-14-~
1.BOIL
(1.
i.k65 P
;:IN

"1-'.()Q
PITt
:s::1-'.
ro 110 MH"l. in I'1
~ IRF
[JJ S8L-l[JJ
0.5"' )'H 1,fAH()Q
D-o X IF0
'"I" T'1~ 330 nt[JJ
[JJ
rt
'~210 r I 2.1 0 ffI-" -.,
-" 1-'.rv ~
rt LOit'.,ro~
<ro.,Inrt
it'.,Tro'1
Is- MH1.. ui~ I+11..
l.k§
\1k
1I111
~~30
.10 k
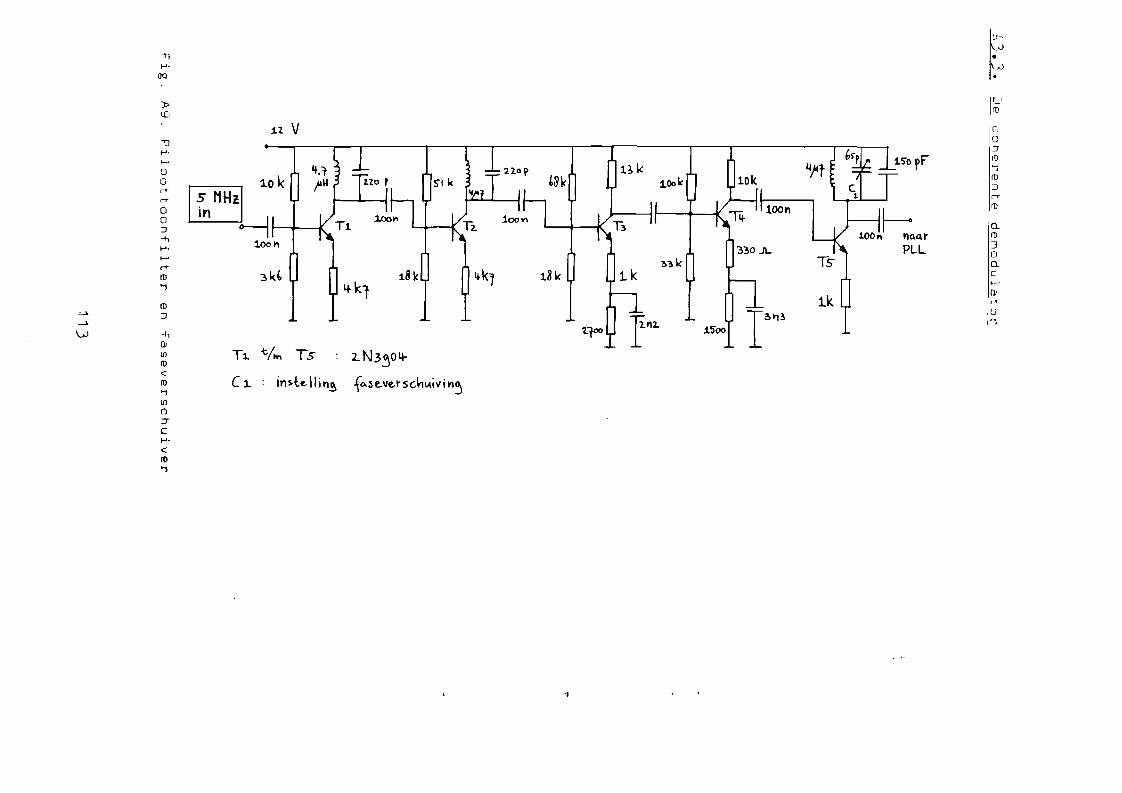
T1. -tIM Ts 2 N3~04-
C1. : insholli.,~ fo.se.ve.rschlAivi"~
~-.0,)
•\ ...J.I~
j.2. V 00:Jm.,
1.0 k L8k m:JI~ MH!I '""'"m
In y0-m
1001'\ 300-
18\< c.......(II
,-f'
0.,
T1f-'.
()Q
~
ill
lJf-'o.....'00
'""'"'""'"00:J-+,f-'.
>-
'""'"CO...,
CO-'--" :J---"
\..oJ -+,(11
OJCO<CO...,OJn::rcf-'.
<CO...,
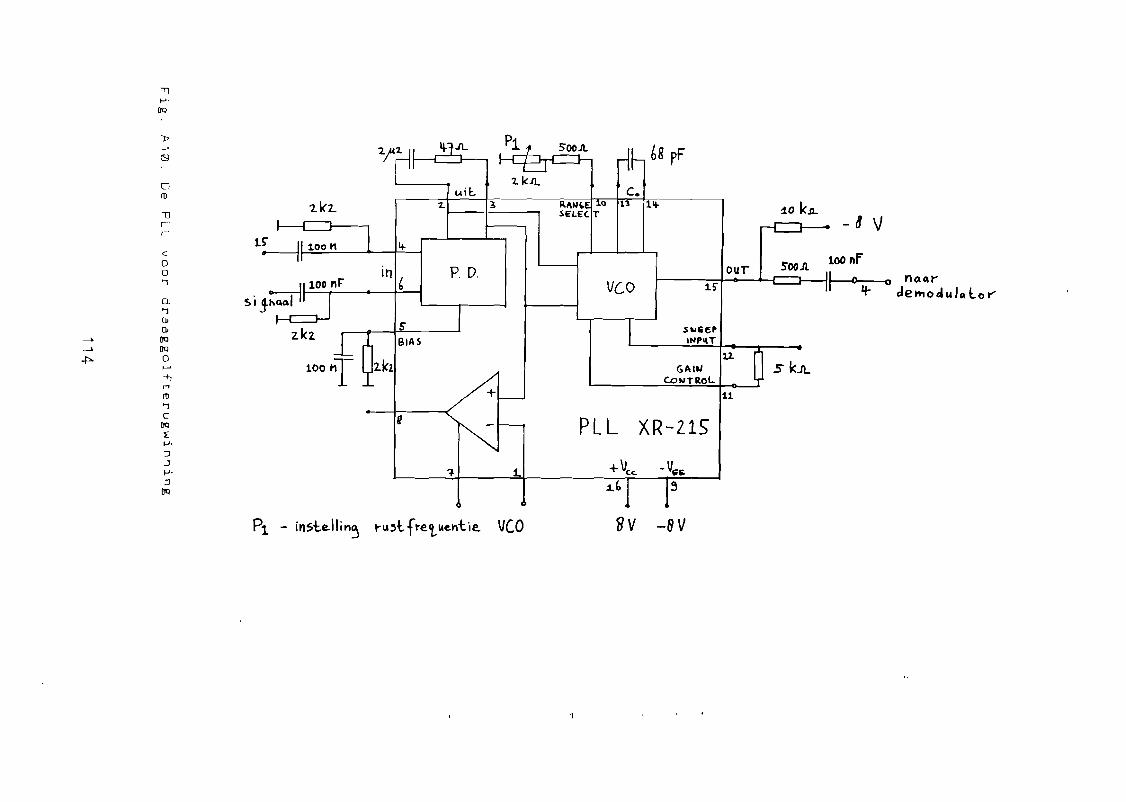
o 0 nQCu"If- cleh1otAulAlol""
- 8 V
100 nf
:10 k.lL
500JLouT
68 pF
c.
vco
Sll/5epINP"T
UGAl" SkJL
CoWTRoL
11
PLL XR-llS
- VIi5-
!'
fJv -8V
1.
2.1<'2.
"1-"0'0
P
CSl
C1m
-0r-,"<:00'J
[l
'JOJOJ
- .... (lQ
-' (lQ
-Po- 0.......-+,~
ro'JC
(lQ
1:1-"
:J:J1-":J
(lQ

Tl1-"
f)Q
):'>
Iron-
o.
lk
ro300.C 100rr=~
OJn-O..,I
01-"., cQt~iet I
---"0
---"c
10011
V11-" SIGNALn-
LM 1....,36 N

,,.
UGJ
PLL:
AAJ.!Vs
V{fIAl.
~e~el/ens
Ko';:::' z. iOb
loopfi It.e..r-
3tkJl.. ikS"
l.kJl..
1
b VCOVour
8
+5
4--------1 = 1N1 t---C=:J--,..-c=t--t-~
veo = 14 LS b24
N1. = Yit "14- He &6Cl = 1(2. LH31.~
~~eL~h~hASt{ tet'" e(\1.i~
Tlf-'.
110
P
rJ
IITi
",-~
0TrrID..,C
IJQ
ff-'.:J:::J
--" f-'.
--" :::J(j\ f-'.
:::JIJQ
Ul0f-'..,0Cf-'.
Pirr
3IDrr
1)
rr

IOREHPeLWAARDEra
NAAR N'f~UIST
FILTER
12.2. nF1.'l nF
P21.00 k
lk
AL+
1 k
1~ T
130 k
220 nF
A1, A2- = LM31.9 Pi. relje.li~ ~e.wenst. Si.3nAc>-1 ni\l~~~
A3, A4- = LF35b PL re5eli"~ dtelrlp~ IwtNl\l'"de.
T1.. ::- :J~6T 2N3i.1~
Tz. = Be. it 1 'C
BI\{; I~
BAND IN
"Tl.....I/Q
~
W
(;)
ror,03cr.....:Jroro.,0.ro
}>(;)
n
ro........ :::J~
-.,'J 0..,ro3
1Jro......~
OJOJ.,0.(1)
IOJ-+>......ID1-"0.1-'-:::J
Dt;

T1.....IIQ,
~.~
~
:::r:f1)
r1
Z'<ncf-'.
U,rT".~
I0:J VANrT"
~
C
->OJ
CD:J AbCIrQ
-+,.....>--'rT"
ltJ'j
10k 100p1k
1,2..nTlk
bs pF('2..
BASIS
B"ND UIT

S I G-NAAIN
-lk
2.k"t +SV
2.10 r -~1 A ~
~3 ~1 B ~ ~1./ "JIIn.
EXTE.RNE "rtVl ~ +3 A ~ ~l.I.-cLOI<I
Ie: It-- J< 'g(¥ 1.._ ~- Nt - N2.J!h
NJ
L... k~N-. SA
A1 A1. = L~ ~ 5"b \\JI
NMV 1 ,t = 'h 1'l LS1'2.1
<;1 :: 'Iii H~ lO1 H5) .
I N1 ~/'" Nq = r lf l.B 00
Fig.A15: Semple/hold en synchronisatie-circuits
119

"Tl~.
lJQ
»..... ,sVm~1
H+»:J[).....
~alJQ I R+m
n CLE/lR
a.
IDR£MPEL I ~lIIIIIII-'
A sV<[)
SGN(A):JI k +A
2.00JL----"
FFS lQN a.0 m D
~SGN(A)"Tl
~'.s ukm.,-IklJQ
cUl
2k- A I S~0 Z.OOA:JI
a.
CF:r ~-ID00a.
A4,As, A' :: lFmID51U ~
FF2. f.,....... - - -
~ o M- e1, (2. ,C~ = '/z. LM31~
52,53 =: '/'f HA2.01 H5
D.v 1 ff3 FF 1, Ffl. = Y'z. 14 L.S~
Frs- = YLt tctLsq>
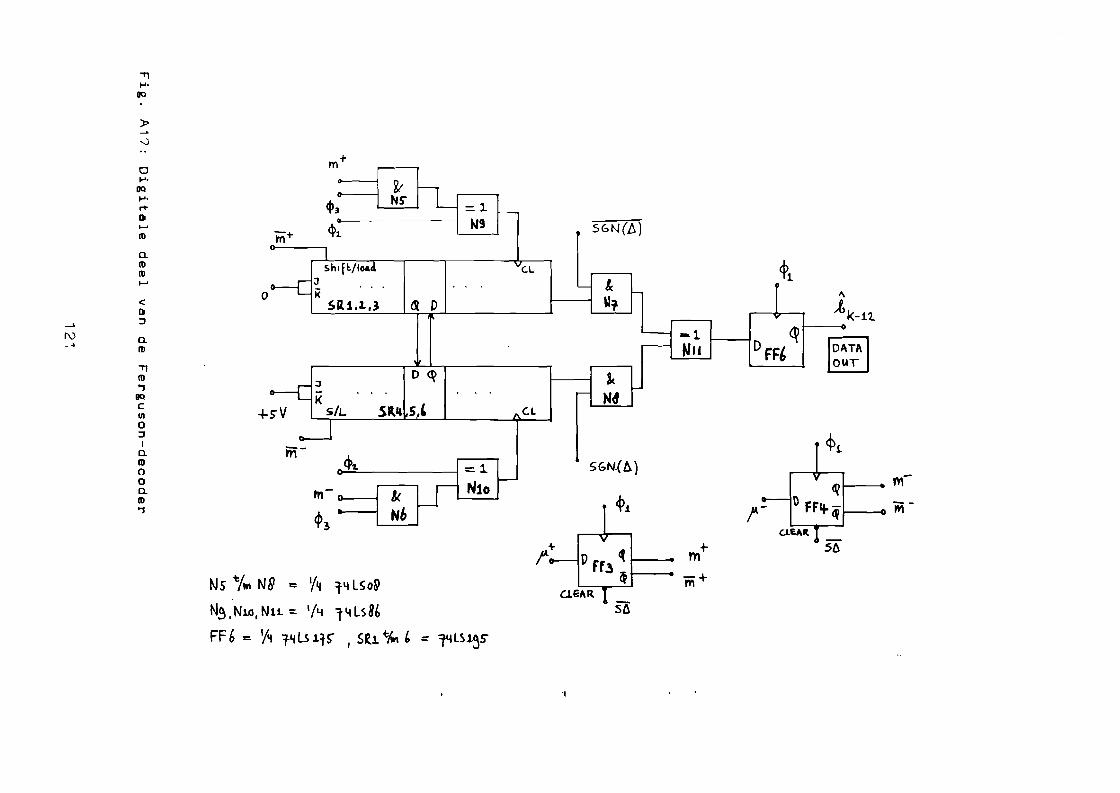
"J, 1<-12.
JOATA IOUT
tV 1------- m
I) FFII- ii t-----4 ii-C.LeA~
,.-
S6N(L\)
SGN.(~)
4>1
l) n ~ 1--
3 ctl---ae"R.
CL
C.L
8<N6
D ~
S~.. S,
o-<t...;..;'-"--- ---l ===. 1
H10
SIl1,l,Jo
Ns Yw. NO = 1~ rLl LSoP
N~.NlO,Nu. =- '/4 rliLS86
FF 6 = Y'I 'tli ls 115" I Sb.~, =
"T11-"
OQ
~~
--J
01-"
OQ1-"....DoI-'
lD
a.lDlDI-'
<Do
-> ::::J
I\) a.-" lD
"T1lD..,
lJQc:IIIa::::JIa.lD0aa.lD..,

<P , ~l.HHl.
: II
II
III
i i'I I
I
__nl......------i-----_nL..----I
I i
Fig. A18: Timing-diagram van de decoder
122