efficient part-based recognition of multiple object classes
DESCRIPTION
Efficient Part-Based Recognition of Multiple Object Classes. Object Class Recognition Systems. Model Representation. 2. Object Class Recognition Systems. Model Representation Learning Algorithm. 3. Object Class Recognition Systems. Model Representation Learning Algorithm - PowerPoint PPT PresentationTRANSCRIPT

Efficient Part-Based Recognition of Multiple Object Classes

Object Class Recognition Systems
• Model Representation
2

Object Class Recognition Systems
• Model Representation
• Learning Algorithm
3

Object Class Recognition Systems
• Model Representation
• Learning Algorithm
• Recognition Algorithm
4

Object Class Recognition Systems
• Model Representation– Part-based model
• Learning Algorithm
• Recognition Algorithm
5

Object Class Recognition Systems
• Model Representation– Part-based model
• Part appearance
• Learning Algorithm
• Recognition Algorithm
6

Object Class Recognition Systems
• Model Representation– Part-based model
• Part appearance• Part position
• Learning Algorithm
• Recognition Algorithm
7

Object Class Recognition Systems
• Model Representation– Part-based model
• Part appearance• Part position
• Learning Algorithm
• Recognition Algorithm
8

History of Part-BasedObject Recognition
TemplateMatching
Part-Based
ConstellationModel
k-FansProposedAlgorithm
Fergus et al. 2003, 2005
Crandall et al. 2005, 2006
Burl et al. 1998
Bag of Parts
Hoffman 1999
9

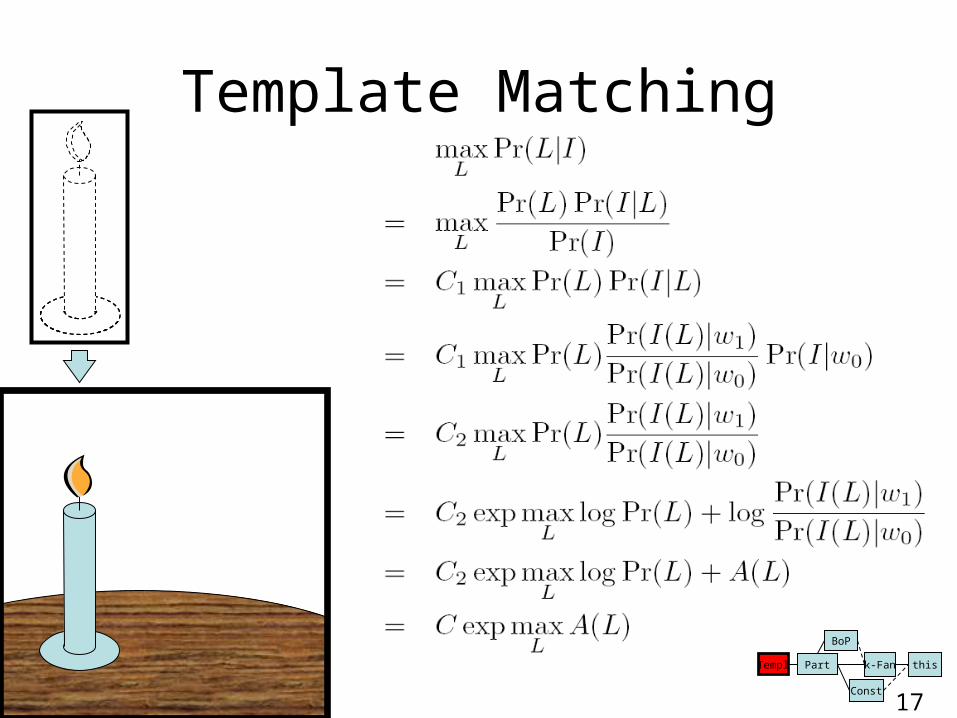
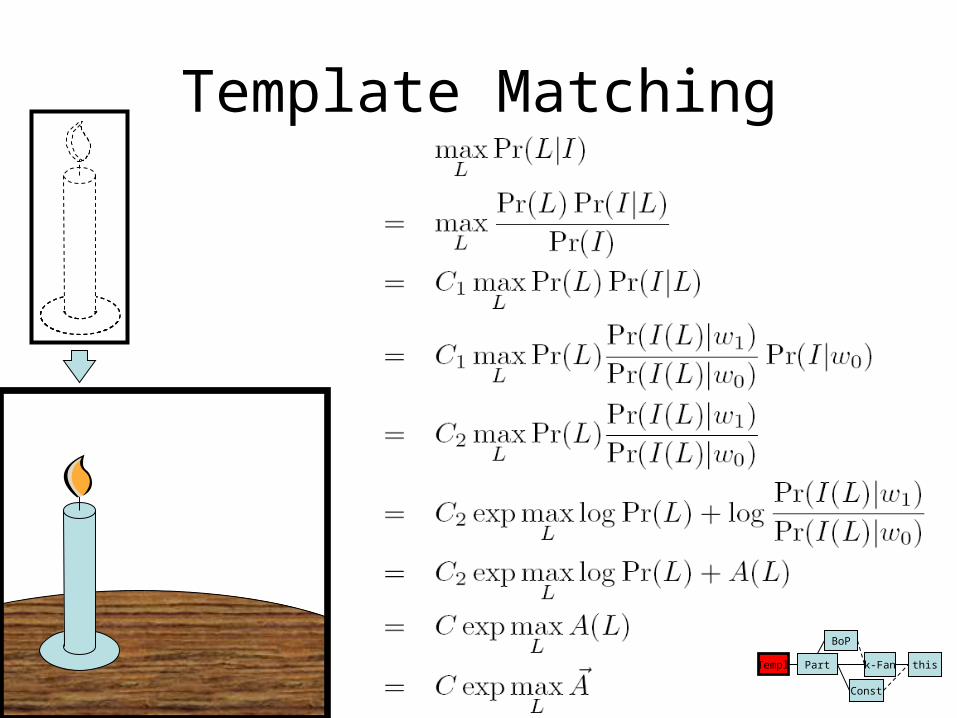
Template Matching
10
Templ Part
Const
k-Fan this
BoP

Template Matching
11
Templ Part
Const
k-Fan this
BoP

Template Matching
12
Templ Part
Const
k-Fan this
BoP

Template Matching
13
Templ Part
Const
k-Fan this
BoP

Template Matching
14
Templ Part
Const
k-Fan this
BoP

Template Matching
15
Templ Part
Const
k-Fan this
BoP

Template Matching
16
Templ Part
Const
k-Fan this
BoP
Template Matching
17
Templ Part
Const
k-Fan this
BoP
Template Matching
18
Templ Part
Const
k-Fan this
BoP

Template Matching
19
Templ Part
Const
k-Fan this
BoP

Template Matching
20
Templ Part
Const
k-Fan this
BoP

Template Matching
21
Templ Part
Const
k-Fan this
BoP

Template Matching
22
Templ Part
Const
k-Fan this
BoP

Template Matching
23
Templ Part
Const
k-Fan this
BoP

Template Matching
24
Templ Part
Const
k-Fan this
BoP

Template Matching
25
max
Templ Part
Const
k-Fan this
BoP

Template Matching
26
Templ Part
Const
k-Fan this
BoP

Template Matching
27
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels)
28
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
29
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
30
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
31
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
32
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
33
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
34
Templ Part
Const
k-Fan this
BoP
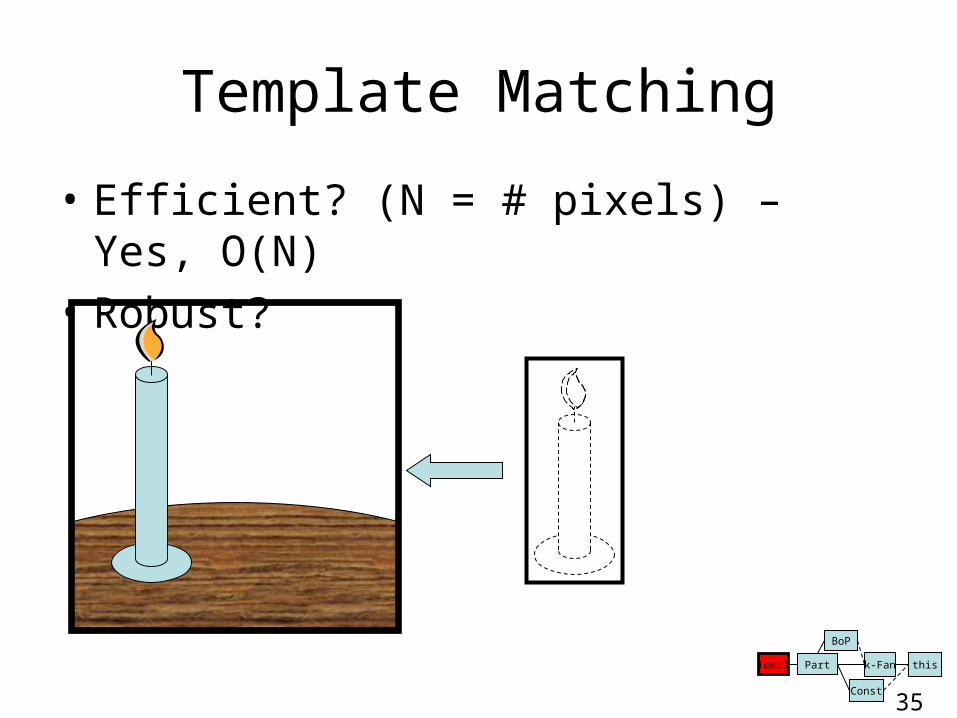
Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust?
35
Templ Part
Const
k-Fan this
BoP

Template Matching
• Efficient? (N = # pixels) – Yes, O(N)
• Robust? – No, inflexible
36
Templ Part
Const
k-Fan this
BoP

Template vs. Part-Based
Trade-off
RobustEfficient
37
Templ Part
Const
k-Fan this
BoP

Part-Based
38
Templ Part
Const
k-Fan this
BoP

Part-Based
39
Templ Part
Const
k-Fan this
BoP

Part-Based
40
Templ Part
Const
k-Fan this
BoP

Part-Based
41
Templ Part
Const
k-Fan this
BoP

Part-Based
42
Templ Part
Const
k-Fan this
BoP

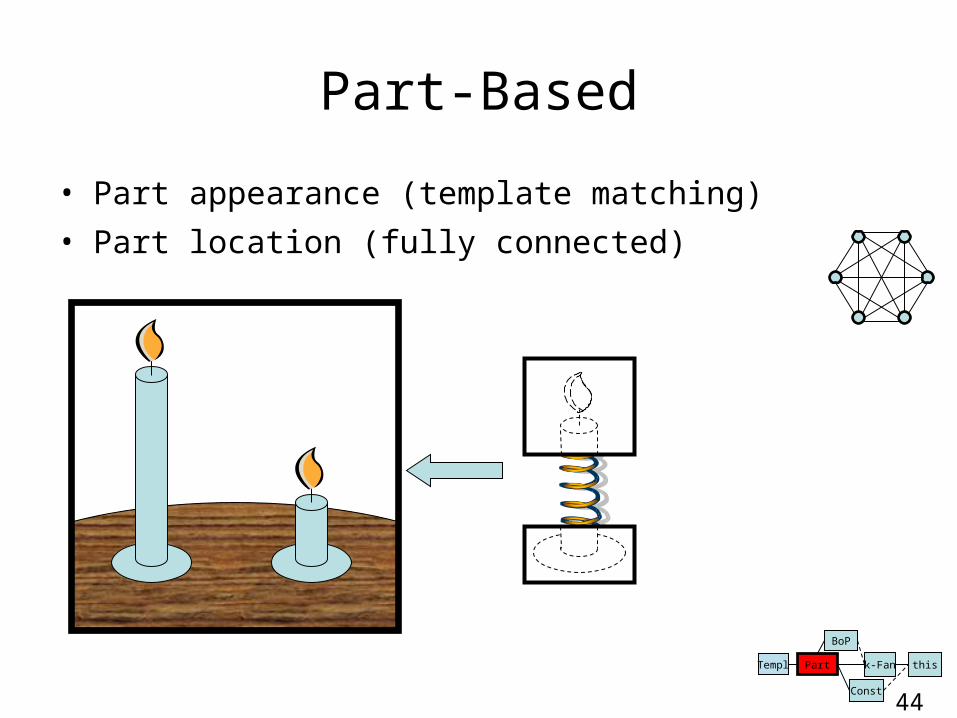
Part-Based
• Part appearance (template matching)
43
Templ Part
Const
k-Fan this
BoP
Part-Based
• Part appearance (template matching)
• Part location (fully connected)
44
Templ Part
Const
k-Fan this
BoP

Part-Based
45
Templ Part
Const
k-Fan this
BoP

Part-Based
46
Templ Part
Const
k-Fan this
BoP

Part-Based
47
Templ Part
Const
k-Fan this
BoP

Part-Based
48
Templ Part
Const
k-Fan this
BoP

Part-Based
49
Templ Part
Const
k-Fan this
BoP

Part-Based
50
Templ Part
Const
k-Fan this
BoP

Part-Based
51
Templ Part
Const
k-Fan this
BoP

Part-Based
52
Templ Part
Const
k-Fan this
BoP

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels)
53
Templ Part
Const
k-Fan this
BoP

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels)
54
Templ Part
Const
k-Fan this
BoP
P

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels)
55
Templ Part
Const
k-Fan this
BoP
P
N

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels)
56
Templ Part
Const
k-Fan this
BoP
P
N
…

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels)
57
Templ Part
Const
k-Fan this
BoP
P
N
N…

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels) – No, O(PN^P)
58
Templ Part
Const
k-Fan this
BoP
P
N
N…

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels) – No, O(PN^P)• Robust?
59
Templ Part
Const
k-Fan this
BoP
P
N
N…

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels) – No, O(PN^P)• Robust? Yes!
60
Templ Part
Const
k-Fan this
BoP
P
N
N…

Part-Based
• Part appearance (template matching)
• Part location (fully connected)• Efficient? (P = #parts, N = #pixels) – No, O(PN^P)• Robust? Yes!• All following algorithms try to approach the accuracy of
this method, while gaining efficiency
61
Templ Part
Const
k-Fan this
BoP
P
N
N…

Constellation Model
Trade-off
Dense Image (n=N)
RobustEfficient
62
Templ Part
Const
k-Fan this
BoP

Constellation Model
Trade-off
Sparse Interest Points (n<<N) Dense Image (n=N)
RobustEfficient
63
Templ Part
Const
k-Fan this
BoP

Constellation Model
• Efficient O(Pn^P) (n = # interest points, P = # parts)
64
Templ Part
Const
k-Fan this
BoP

Constellation Model
• Efficient O(Pn^P) (n = # interest points, P = # parts)
• Approximation:– Sparse image: only consider interest points
(n<<N)
65
Templ Part
Const
k-Fan this
BoP

Constellation Model
• Efficient O(Pn^P) (n = # interest points, P = # parts)
• Approximation:– Sparse image: only consider interest points
(n<<N)
• Interest point detector too general– regions of the image discarded without
considering particular parts that may be there
66
Templ Part
Const
k-Fan this
BoP

Bag of Parts
Trade-off
RobustEfficient
67
Templ Part
Const
k-Fan this
BoP

Bag of Parts
Trade-off
RobustEfficient
68
Templ Part
Const
k-Fan this
BoP

Bag of Parts
69
Templ Part
Const
k-Fan this
BoP

Bag of Parts
• Part appearance (template matching)
70
Templ Part
Const
k-Fan this
BoP

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
71
Templ Part
Const
k-Fan this
BoP

Bag of Parts
72
Templ Part
Const
k-Fan this
BoP

Bag of Parts
73
Templ Part
Const
k-Fan this
BoP

Bag of Parts
74
Templ Part
Const
k-Fan this
BoP

Bag of Parts
75
Templ Part
Const
k-Fan this
BoP

Bag of Parts
76
Templ Part
Const
k-Fan this
BoP

Bag of Parts
77
Templ Part
Const
k-Fan this
BoP

Bag of Parts
• Part appearance (template matching)
• Part location (ignored, disconnected)
max
max
Templ Part
Const
k-Fan this
BoP
78
Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels)
79
Templ Part
Const
k-Fan this
BoP

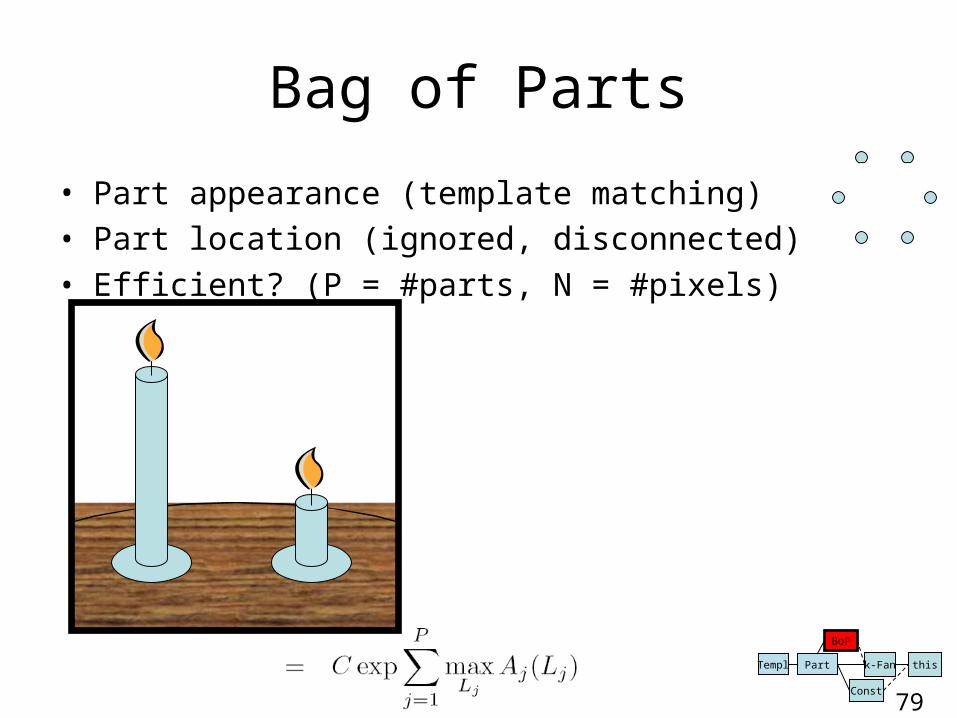
Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels)
80
Templ Part
Const
k-Fan this
BoPN

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels)
81
Templ Part
Const
k-Fan this
BoPN
P

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
82
Templ Part
Const
k-Fan this
BoPN
P

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
83
Templ Part
Const
k-Fan this
BoP
• Robust?

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
84
Templ Part
Const
k-Fan this
BoP
• Robust?

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
85
Templ Part
Const
k-Fan this
BoP
• Robust?– No localization

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
86
Templ Part
Const
k-Fan this
BoP
• Robust?– No localization
Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
87
Templ Part
Const
k-Fan this
BoP
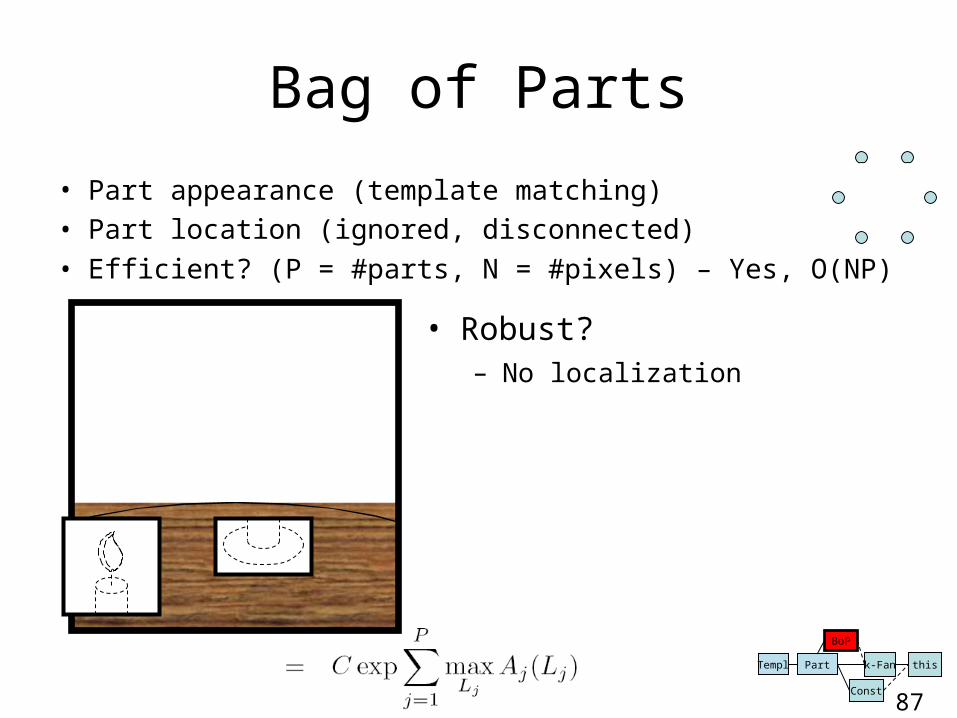
• Robust?– No localization

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
88
Templ Part
Const
k-Fan this
BoP
• Robust?– No localization
– More likely to find false detections

Bag of Parts
• Part appearance (template matching)• Part location (ignored, disconnected)
• Efficient? (P = #parts, N = #pixels) – Yes, O(NP)
89
Templ Part
Const
k-Fan this
BoP
• Robust?– No localization
– More likely to find false detections
– …but still in common use

k-Fans
RobustEfficient
90
Templ Part
Const
k-Fan this
BoP

k-Fans
RobustEfficient
91
Templ Part
Const
k-Fan this
BoP

k-Fans
RobustEfficient
92
Templ Part
Const
k-Fan this
BoP

k-Fans
…
RobustEfficient
93
Templ Part
Const
k-Fan this
BoP

k-Fans
…
Trade-off
RobustEfficient
94
Templ Part
Const
k-Fan this
BoP

1-Fans
95
Templ Part
Const
k-Fan this
BoP

1-Fans
96
Templ Part
Const
k-Fan this
BoP

1-Fans
97
Templ Part
Const
k-Fan this
BoP

1-Fans
98
Templ Part
Const
k-Fan this
BoP
1-Fans
99
Templ Part
Const
k-Fan this
BoP

1-Fans
100
Templ Part
Const
k-Fan this
BoP

1-Fans
101
Templ Part
Const
k-Fan this
BoP
• Look at the probability model for locations

1-Fans
102
Templ Part
Const
k-Fan this
BoP
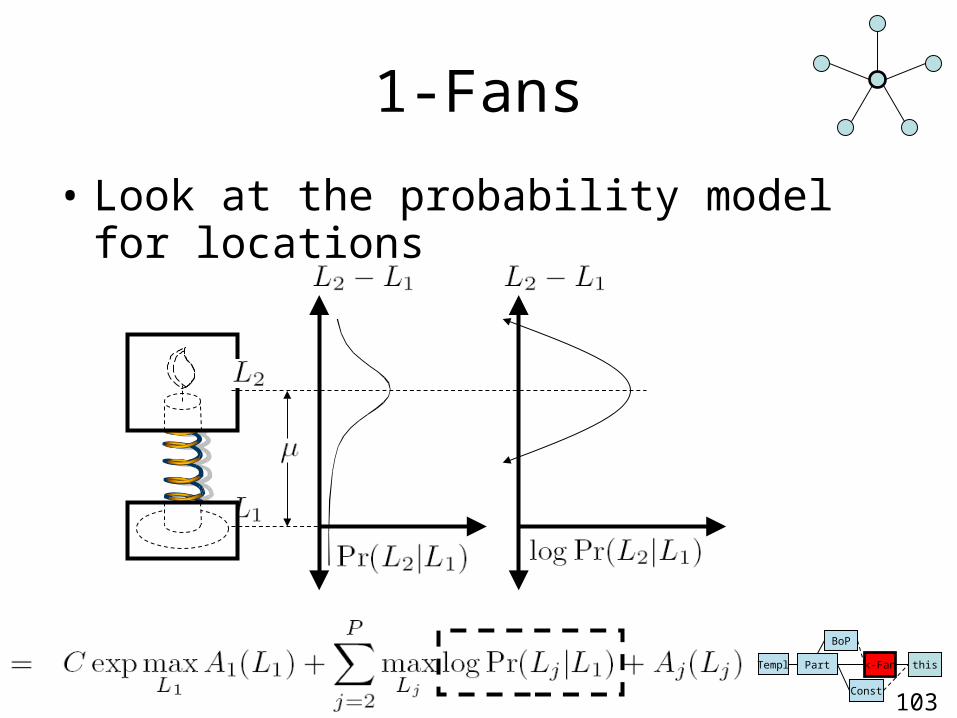
• Look at the probability model for locations
1-Fans
103
Templ Part
Const
k-Fan this
BoP
• Look at the probability model for locations

104
Templ Part
Const
k-Fan this
BoP
1-Fans

105
Templ Part
Const
k-Fan this
BoP
1-Fans
...

106
Templ Part
Const
k-Fan this
BoP
1-Fans
...

107
Templ Part
Const
k-Fan this
BoP
1-Fans
...

108
Templ Part
Const
k-Fan this
BoP
1-Fans
...

109
Templ Part
Const
k-Fan this
BoP
1-Fans
...

110
Templ Part
Const
k-Fan this
BoP
1-Fans
...

111
Templ Part
Const
k-Fan this
BoP
1-Fans
...

112
Templ Part
Const
k-Fan this
BoP
1-Fans
...

113
Templ Part
Const
k-Fan this
BoP
1-Fans
...

114
Templ Part
Const
k-Fan this
BoP
1-Fans
...

115
Templ Part
Const
k-Fan this
BoP
1-Fans
...

116
Templ Part
Const
k-Fan this
BoP
1-Fans
...

117
Templ Part
Const
k-Fan this
BoP
1-Fans
...

118
Templ Part
Const
k-Fan this
BoP
1-Fans
...

119
Templ Part
Const
k-Fan this
BoP
1-Fans
...

120
Templ Part
Const
k-Fan this
BoP
1-Fans
...

121
Templ Part
Const
k-Fan this
BoP
1-Fans
...

122
Templ Part
Const
k-Fan this
BoP
1-Fans
...

123
Templ Part
Const
k-Fan this
BoP
1-Fans
...

124
Templ Part
Const
k-Fan this
BoP
1-Fans
...

125
Templ Part
Const
k-Fan this
BoP
1-Fans
...

126
Templ Part
Const
k-Fan this
BoP
1-Fans
...

1-Fans
Templ Part
Const
k-Fan this
BoP

1-Fan
+
… …
128
Templ Part
Const
k-Fan this
BoP

• Efficient? (N = # pixels, P = # parts)
1-Fans
129
Templ Part
Const
k-Fan this
BoP

• Efficient? (N = # pixels, P = # parts)
1-Fans
130
Templ Part
Const
k-Fan this
BoP
N

• Efficient? (N = # pixels, P = # parts)
1-Fans
131
Templ Part
Const
k-Fan this
BoP
P
N

• Efficient? (N = # pixels, P = # parts)
1-Fans
132
Templ Part
Const
k-Fan this
BoP
P
N
N

• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2)
1-Fans
133
Templ Part
Const
k-Fan this
BoP
N
P
N

• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2)– Use Dynamic Programming:
1-Fans
134
Templ Part
Const
k-Fan this
BoP
N
P
N

• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2)– Use Dynamic Programming:
• Precompute DTj image in O(N)
1-Fans
135
Templ Part
Const
k-Fan this
BoP
N
P
N

• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2)– Use Dynamic Programming:
• Precompute DTj image in O(N)
• Then add the A1 and DTj images
1-Fans
136
Templ Part
Const
k-Fan this
BoP
N
P
N

• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2) O(NP) – Same as bag of parts!– Use Dynamic Programming:
• Precompute DTj image in O(N)
• Then add the A1 and DTj images
1-Fans
137
Templ Part
Const
k-Fan this
BoP
N
P
N
• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2) O(NP) – Same as bag of parts!
• Robust?
1-Fans
138
Templ Part
Const
k-Fan this
BoP
• Efficient? (N = # pixels, P = # parts) Yes, O(PN^2) O(NP) – Same as bag of parts!
• Robust? – Yes, better than bag of parts.
1-Fans
139
Templ Part
Const
k-Fan this
BoP

Aren’t We Done?
• Object Recognition is efficient and robust. Can’t we stop here?

Aren’t We Done?
• Object Recognition is efficient and robust. Can’t we stop here?
• What about…

Aren’t We Done?
• Object Recognition is efficient and robust. Can’t we stop here?
• What about…– Detecting multiple object classes? (M = #
objects… think 30,000) O(MNP)

Recap: History of Part-BasedObject Recognition
TemplateMatching
Part-Based
ConstellationModel
k-FansProposedAlgorithm
Fergus et al. 2003, 2005
Crandall et al. 2005, 2006
Burl et al. 1998
Bag of Parts
Hoffman 1999
143

AccurateEfficient
Proposed Algorithm
1-fan
Sparse Appearance Image(thresholded)
Does not rely on ageneralinterest point detector
144
Templ Part
Const
k-Fan this
BoP

145
Proposed Algorithm
Templ Part
Const
k-Fan this
BoP

146
Proposed Algorithm
Templ Part
Const
k-Fan this
BoP

147
Proposed Algorithm
Templ Part
Const
k-Fan this
BoPThis is sufficientto solve 0-fans:

148
Proposed Algorithm
Templ Part
Const
k-Fan this
BoPThis is sufficientto solve 0-fans:
max
max

Proposed Algorithm
• How do we threshold appearances in sublinear time (i.e. < O(MNP)? M = # objects, N = # pixels, P = # parts/object)
Templ Part
Const
k-Fan this
BoP

Proposed Algorithm
• How do we threshold appearances in sublinear time (i.e. < O(MNP)? M = # objects, N = # pixels, P = # parts/object)
• View thresholded appearance detection as an R-nearest neighbor problem
Templ Part
Const
k-Fan this
BoP

R-Nearest Neighbors
• What is the set of points in a database that are within a radius R from the query point q?
Templ Part
Const
k-Fan this
BoP
q

R
R-Nearest Neighbors
• What is the set of points in a database that are within a radius R from the query point q?
Templ Part
Const
k-Fan this
BoP
q

R-Nearest Neighbors
• What is the set of points in a database that are within a radius R from the query point q?
Templ Part
Const
k-Fan this
BoP
q

• The space part appearances (high dimensions)
R-Nearest Neighbors
q

• The space part appearances (high dimensions)
• Assume part appearances are identically distributed spherical Gaussians (i Σi =cI)
R-Nearest Neighbors
q

• The space part appearances (high dimensions)
• Assume part appearances are identically distributed spherical Gaussians (i Σi =cI)
• Database points are the means (μi)
R-Nearest Neighbors
q

• The space part appearances (high dimensions)
• Assume part appearances are identically distributed spherical Gaussians (i Σi =cI)
• Database points are the means (μi)
• 1-Fan part appearances can be expressed this way
R-Nearest Neighbors
q

• Okay, how fast can it be solved?
R-Nearest Neighbors
q

• Okay, how fast can it be solved?– In low dimensions (<8), kD trees solve it in sublinear time
R-Nearest Neighbors
q

• Okay, how fast can it be solved?– In low dimensions (<8), kD trees solve it in sublinear time
– But the conjectured “curse of dimensionality” prevents it from being solved efficiently for high dimensions
R-Nearest Neighbors
q

• Okay, how fast can it be solved?– In low dimensions (<8), kD trees solve it in sublinear time
– But the conjectured “curse of dimensionality” prevents it from being solved efficiently for high dimensions
• Locality Sensitive Hashing solves the problem approximately,– misses some points with probability 1-δ
– Solves it in O(nd1/c+o(1))
– Trades off probability of false negative for efficiency
R-Nearest Neighbors

...
162
Proposed Algorithm
Templ Part
Const
k-Fan this
BoP

163
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

164
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

165
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

166
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

167
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

168
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

169
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm

170
...
Templ Part
Const
k-Fan this
BoP
Proposed Algorithm
Now we can do this efficiently
171
...
Templ Part
Const
k-Fan this
BoP
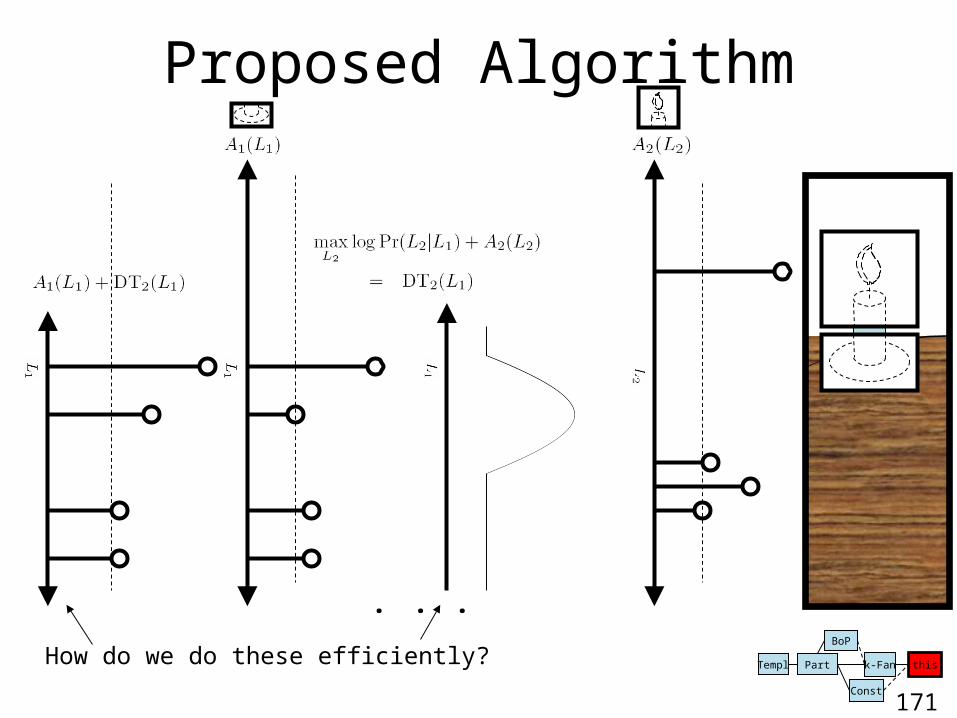
Proposed Algorithm
How do we do these efficiently?
Proposed Algorithm
• Lazy distance transforms, and HA*LD• Coming soon