eece 396-1 hybrid and embedded systems: computation t. john koo institute for software integrated...
Post on 19-Dec-2015
213 views
TRANSCRIPT

EECE 396-1Hybrid and Embedded Systems: Computation
T. John Koo
Institute for Software Integrated Systems
Department of Electrical Engineering and Computer Science
Vanderbilt University
300 Featheringill HallJanuary 14, 2004
http://www.vuse.vanderbilt.edu/~kootj
2
Hybrid Systems UC Berkeley
Spring 2002 by T. John Koo, S. Shankar Sastryhttp://robotics.eecs.berkeley.edu/~koo/Sp02/
Spring 2001 by T. John Koo, S. Shankar Sastryhttp://robotics.eecs.berkeley.edu/~koo/Sp01/
Spring 2000 by Karl. H. Johansson, Luca de Alfaro, Thomas A. Henzingerhttp://www.s3.kth.se/~kallej/eecs291e/
Spring 1999 by John Lygeros, S. Shankar Sastryhttp://robotics.eecs.berkeley.edu/~lygeros/Teaching/ee291E.html
Spring 1998 by Thomas A. Henzinger, S. Shankar Sastry Stanford University
Spring 2002 by Claire Tomlinhttp://www.stanford.edu/class/aa278a/
University of Pennsylvania Fall 2000 by Rajeev Alur, George J. Pappas
http://www.seas.upenn.edu/~pappasg/EE601/

3
Hybrid System
A system built from atomic discrete components and continuous components by parallel and serial composition, arbitrarily nested.
The behaviors and interactions of components are governed by models of computation (MOCs).
Discrete Components Finite State Machine (FSM) Discrete Event (DE) Synchronous Data Flow (SDF)
Continuous Components Ordinary Differential Equation (ODE) Partial Differential Equation (PDE)
q1q2
q3
u
xç = f (x) + g(x)u
x

4
Hybrid System
Continuous systems with phased operations Bouncing ball Circuits with diodes Switching circuits
Continuous systems controlled by discrete inputs Thermostat Water tank Engine control systems Multi-modal systems Embedded control systems
q1q2
q3
u
xç = f (x) + g(x)u
x

5
The Heterogeneity of Systems
power train
embedded controller sensors
fuel air
E H
C I
engine
Continuous Time
Finite StateMachine
Discrete Event
An Engine Control System

6
Models of Computation
power train
embedded controller sensors
fuel air
E H
C I
engine
Continuous Time• continuous functions• continuous time• continuous signals
Finite State Machine• states• transitions
Discrete Event• operations on events• continuous time• discrete events

7
The Hierarchical View of Systems
controller
I C
H
car model
enginepowertrain
E

8
Embedded Systems
Embedded systems composed of hardware and software components are designed to interact with a physical environment in real-time in order to fulfill control objectives and design specifications.
Environment
Embedded Hardware
Board Support Packages
Operating System
Embedded Software

9
Embedded Systems
Embedded software refers to application software to process information to and fro between the information and physical worlds.
Environment
Embedded Hardware
Board Support Packages
Operating System
Embedded Software
q1q2
q3
u
xç = f (x) + g(x)u
xD/A A/D

10
High-ConfidenceEmbedded Software
From Design to Implementation
q1q2
q3
u(t)
xç = f (x) + g(x)u
x(t)
GPS Card INSServos
q1q2
q3
x(t)u(t)
x[k]u[k]
How?
1. Guaranteed closed-loop performance
2. Interaction between asynchronous and synchronous components
Embedded Computer
EmbeddedSoftware

11
GroundStation
DQICONT
DQIGPS
INS UpdateINS Update Boeing DQI-NP
100Hz
PRTK@ 5HzPXY@1Hz
Flight Status
Command
NovAtel GPS RT-2
GPS UpdateGPS Update
ULREADUltrasonic Ultrasonic sensors@4sensors@4±1Hz1HzVCOMM
Relative Altitude
Control outputat 50Hz
Nav data
DGPS measurement
Nav Data to Vision computer
@10Hz
RS-232
Shared Memory
Radio link
RX valuesRX valuesYamaha Receiver(using HW INT & proxy)
Ground computerWin 98
Processesrunning on QNX
4±1Hz10Hz
ANYTIME
APERIODIC
PERIODIC
PERIODIC
PERIODIC
High-Confidence Embedded Software

12
Why Hybrid Systems?
Modeling abstraction of Continuous systems with phased operation (e.g. walking robots,
mechanical systems with collisions, circuits with diodes) Continuous systems controlled by discrete inputs (e.g. switches, valves,
digital computers) Coordinating processes (multi-agent systems)
Important in applications Hardware verification/CAD, real time software Manufacturing, communication networks, multimedia
Large scale, multi-agent systems Automated Highway Systems (AHS) Air Traffic Management Systems (ATM) Uninhabited Aerial Vehicles (UAV) Power Networks
13
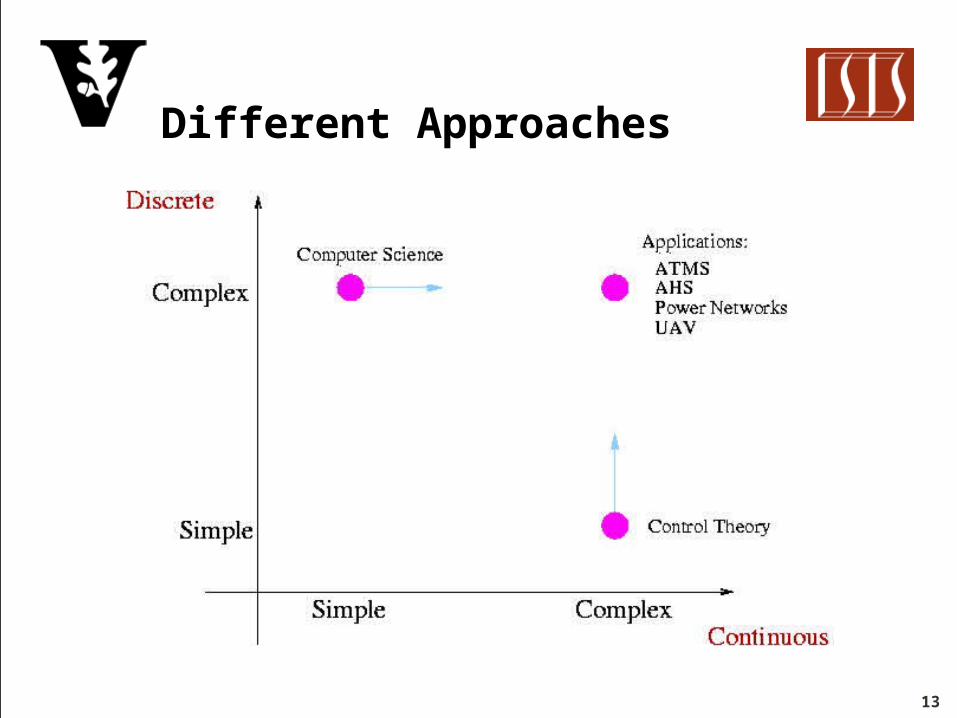
Different Approaches

14
H ig h -C o n fid e n c e E m b e d d e d S y s te m s• C o rre c tn e ss b y c o n s tru c tio n
• F a u lt- to le ra n ce
• R e s is ta n ce to a tta c k
200 Hz 400
Hz
200 Hz
1 kHz
F lig h t C o n tro l S o ftw a re
Embedded Software• Embedded software refers to application software to process
information to and fro between the information and physical worlds.
Environment
Embedded Hardware
Board Support Packages
Operating System
Embedded Software
N e tw o r k - C e n t r ic D is t r ib u te d S y s te m s• C o o p e r a t iv e C o n tro l o f M u lt ip le U A V s
• P o w e r E le c t ro n ic s C ir c u i ts
• S e n s o r N e tw o rk s
H y b r i d S y s t e m sC o n t r o l T h e o r y
C o n t r o l o f i n d i v i d u a l a g e n t sC o n t i n u o u s m o d e l sD i f f e r e n t i a l e q u a t i o n s
C o m p u t e r S c i e n c eM o d e l s o f c o m p u t a t i o nC o m m u n i c a t i o n m o d e l sD i s c r e t e e v e n t s y s t e m s
H y b r i d S y s t e m s
Research Directions

15
What Are Hybrid Systems?
Dynamical systems with interacting continuous and discrete dynamics

16
Proposed Framework
Control TheoryControl of individual agentsContinuous modelsDifferential equations
Computer ScienceModels of computationCommunication modelsDiscrete event systems
Hybrid Systems

17
ENNA GmbH
Power Electronics Power electronics found in:
DC-DC converters Power supplies Electric machine drives
Circuits can be defined as networks of: Voltage and current sources (DC or AC) Linear elements (R, L, C) Semiconductors used as switches (diodes, transistors)

18
ENNA GmbH
Power Electronics Discrete dynamics
N switches, (up to) 2N discrete states Only discrete inputs (switching): some
discrete transitions under control, others not
Continuous dynamics Linear or affine dynamics at each discrete
state
+ +
23=8 possible configurations

19
Power Electronics : DC-DC Converters
Have a DC supply (e.g. battery), but need a different DC voltage
Different configurations depending on whether Vin<Vout or Vin>Vout
Control switching to maintain Vout with changes in load (R), and Vin
Vin
L C Rsw1
sw2+
-
+
-
Vout
iL
iL
Vout
2 1 2

20
Two Output DC-DC Converter
Want two DC output voltages Inductors are big and heavy, so
only want to use one Similar to “two tank” problem
Vin
L
C2 R2sw1
sw2+
-
+
-
VoutA
iL+
-
VoutB
sw3
C3 R3
iL
VoutA
VoutB
1 2 3 1 2 3

21
Circuit Operation
One and only one switch closed at any time
Each switch state has a continuous dynamics
sw1: iL, VoutA, VoutB
sw2: iL , VoutA , VoutB sw3: iL , VoutA, VoutB

22
Design Objective
Objective: Regulate two output voltages and limit current by switching between three discrete states with continuous dynamics.
iL, VoutA, VoutB
iL , VoutA , VoutB
iL , VoutA, VoutB
23
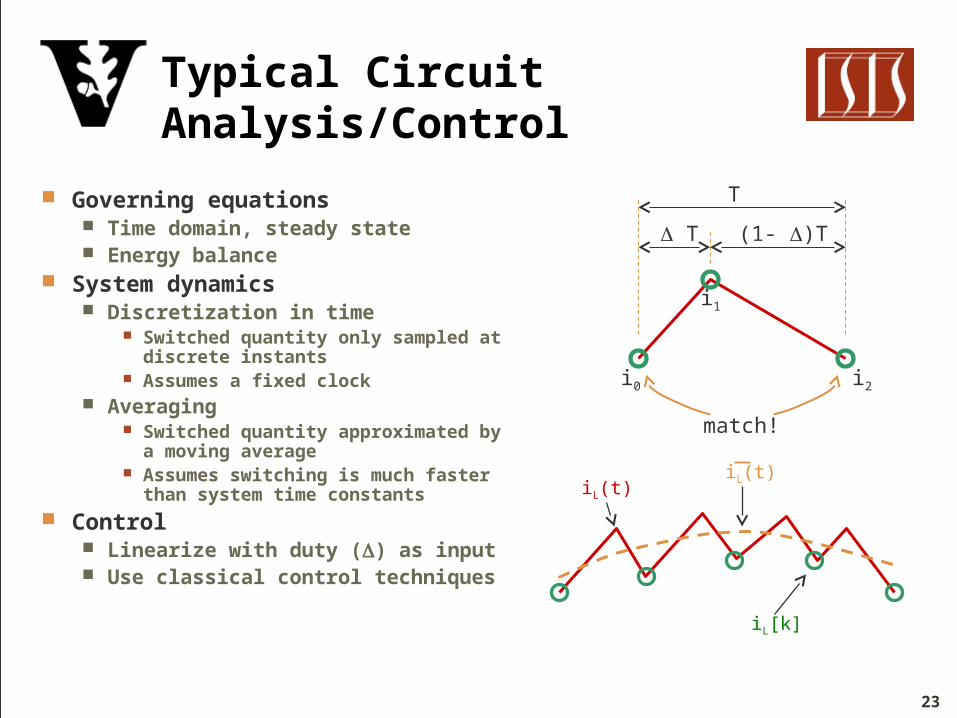
Typical Circuit Analysis/Control
Governing equations Time domain, steady state Energy balance
System dynamics Discretization in time
Switched quantity only sampled at discrete instants
Assumes a fixed clock Averaging
Switched quantity approximated by a moving average
Assumes switching is much faster than system time constants
Control Linearize with duty () as input Use classical control techniques
T
T (1- )T
i0
i1
i2
match!
iL(t)iL(t)
iL[k]
24
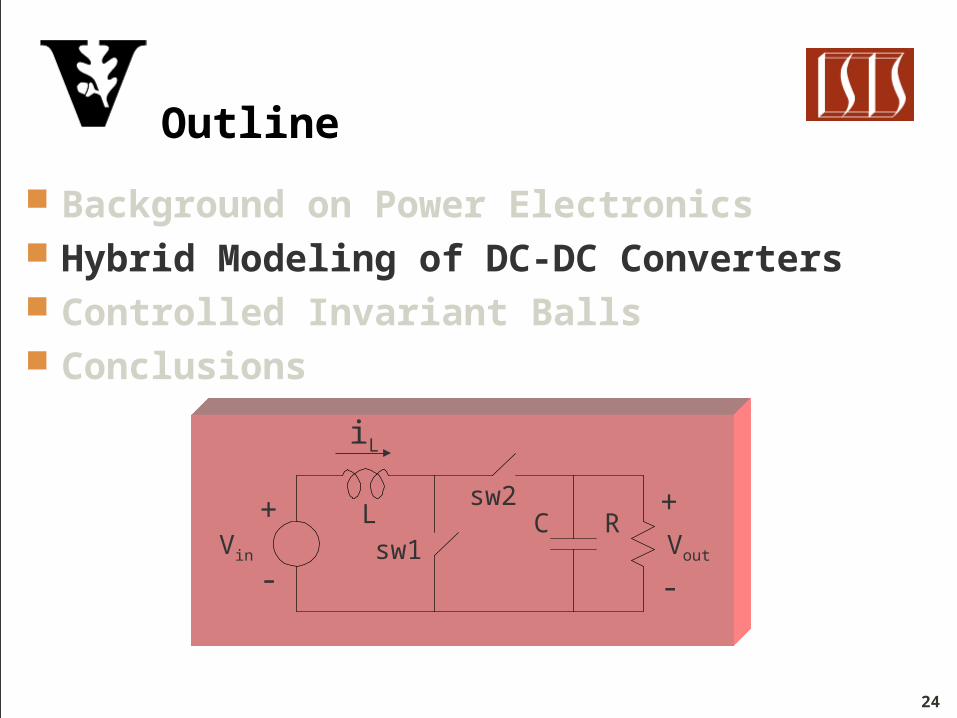
Outline
Background on Power Electronics Hybrid Modeling of DC-DC Converters Controlled Invariant Balls Conclusions
Vin
L C Rsw1
sw2+
-
+
-Vout
iL

25
Problem Formulation

26
q1
xç(t) = f q1(x(t))x(t) 2 I q1
q2
xç(t) = f q2(x(t))x(t) 2 I q2
û = û2
û = û1
q1
û = û1
q2
û = û2
x 2 G12
x 2 G21
û 2 Î
x 2 X
H1
H2
Problem Formulation Parallel Composition of Hybrid
Automata
Given a collection of Modes and Edges, design Guards

27
Research Issues Modeling & Simulation
Control: classify discrete phenomena, existence and uniqueness of execution, Zeno [Branicky, Brockett, van der Schaft, Astrom]
Computer Science: composition and abstraction operations [Alur-Henzinger, Lynch, Sifakis, Varaiya]
Analysis & Verification Control: stability, Lyapunov techniques [Branicky, Michel], LMI techniques
[Johansson-Rantzer] Computer Science: Algorithmic [Alur-Henzinger, Sifakis, Pappas-Lafferrier-
Sastry] or deductive methods [Lynch, Manna, Pnuelli], Abstraction [Pappas-Tabuada, Koo-Sastry]
Controller Synthesis Control: optimal control [Branicky-Mitter, Bensoussan-Menaldi],
hierarchical control [Caines, Pappas-Sastry], supervisory control [Lemmon-Antsaklis], safety specifications [Lygeros-Sastry, Tomlin-Lygeros-Sastry], control mode switching [Koo-Pappas-Sastry]
Computer Science: algorithmic synthesis [Maler et.al., Wong-Toi], synthesis based on HJB [Mitchell-Tomlin]
28
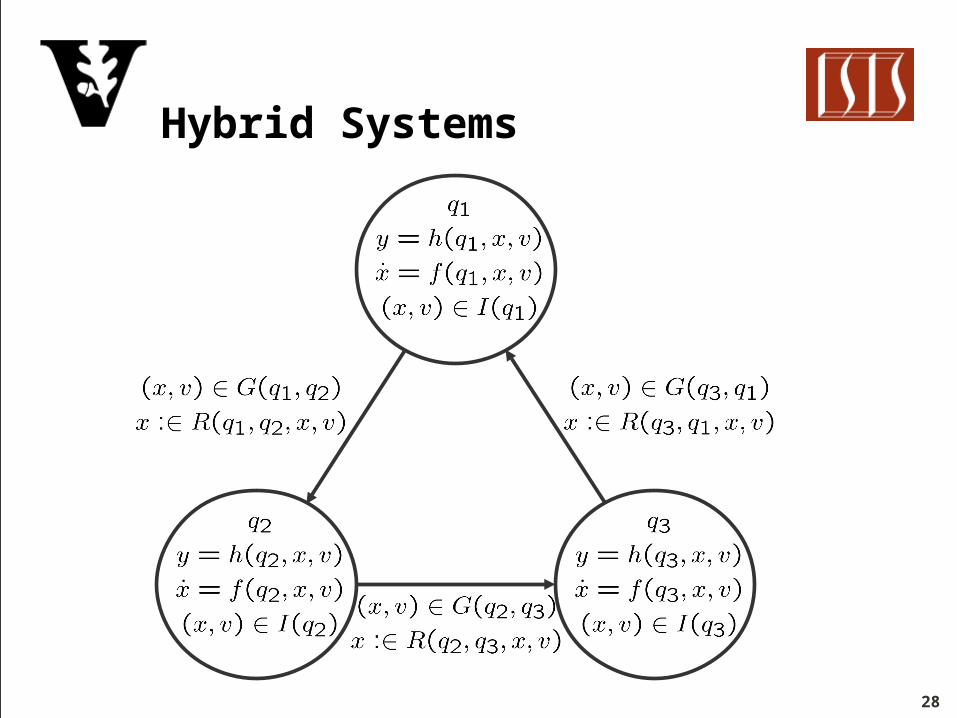
Hybrid Systems

29
Hybrid Systems
Hybrid Automata (Lygeros-Tomlin-Sastry, 2001)
Ref: J. Lygeros, C. Tomlin, and S. Sastry, The Art of Hybrid Systems, July 2001.

30
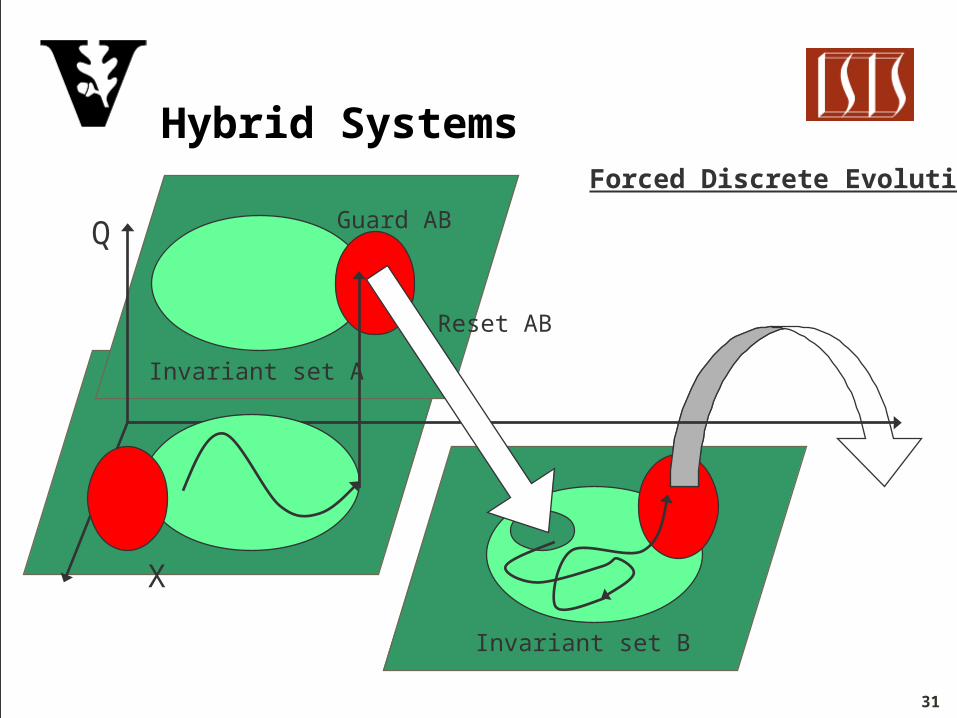
Invariant set A
Invariant set B
Guard AB
Reset AB
Hybrid Systems
Q
X
Enabled Discrete Evolution
31
Invariant set A
Invariant set B
Guard AB
Reset AB
Hybrid Systems
Q
X
Forced Discrete Evolution
32
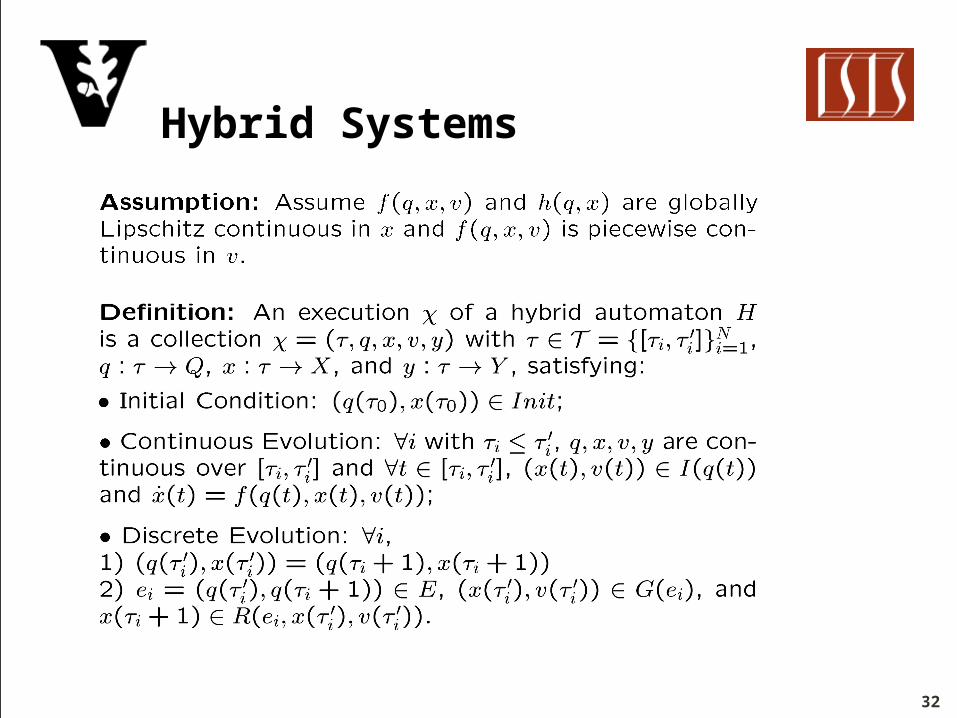
Hybrid Systems

33
Motivating Examples: ThermostatNon-deterministic Hybrid Automaton
t

34
Motivating Examples:Two Tanks

35
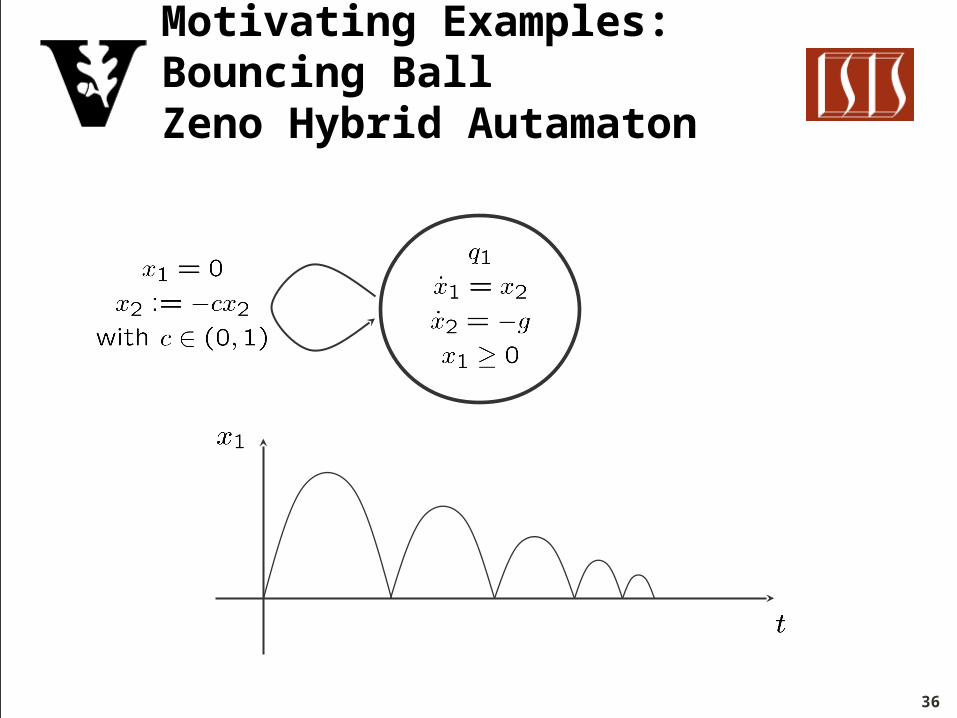
Zeno—infinitely many jumps in finite time
If
Water Tank Automaton
36
Motivating Examples: Bouncing BallZeno Hybrid Autamaton

37
Computational Tools
Simulation Ptolemy II: ptolemy.eecs.berkeley.edu Modelica: www.modelica.org SHIFT: www.path.berkeley.edu/shift Dymola: www.dynasim.se OmSim: www.control.lth.se/~cace/omsim.html ABACUSS: yoric.mit.edu/abacuss/abacuss.html Stateflow: www.mathworks.com/products/stateflow CHARON: http://www.cis.upenn.edu/mobies/charon/ Masaccio:
http://www-cad.eecs.berkeley.edu/~tah/Publications/masaccio.html

38
Computational Tools
Simulation
Models of Computation
System Complexity
Ptolemy II
DymolaModelica
ABACUSS
SHIFT
OmSim
MasaccioCHARON
StateFlow/Simulink

39
Verification Deductive Methods
Theorem-Proving techniques [Lynch, Manna, Pnuelli] Model Checking
State-space exploration [Alur-Henzinger, Sifakis, Pappas-Lafferrier-Sastry]
X S
X F
Post(X S)
Post(P) = fx 2 Xj9x0 2 P 9t õ 0 s:t: x = þ(t;ri;x0)g
Check if Post(X S) \ X F = ; ?
Forward Reachable Set
Reachability Problem

40
Computational Tools – Hybrid Systems
Reach Sets ComputationFiniteAutomata
TimedAutomata
LinearAutomata
LinearHybrid Systems
NonlinearHybrid Systems
d/dtCheckMate
Timed COSPANKRONOSTimed HSISVERITIUPPAAL
HYTECHCOSPANSMVVIS…
Requiem
xç= 1 Axçô b xç= Ax xç= f (x)
Si(r i)Sj(r j)
Prei(Sj(r j);r i)
41
Research Directions
Hybrid Systems Embedded Software High-Confidence Embedded Systems Network-Centric Distributed Systems
Development of formal methods for the design of high-confidence embedded software based on hybrid system theory with applications to distributed, network-centric, embedded systems such as sensor networks, power electronics circuits, and cooperative UAV systems

42
Research Collaboration
Institutions Center for Hybrid and Embedded Systems and Software (CHESS),
University of California at Berkeley GRASP Laboratory, University of Pennsylvania Hybrid Systems Laboratory, Stanford University Control Group, Cambridge University INRIA, France KTH, Sweden Honeywell Laboratories Cadence Berkeley Laboratory
Conferences Workshop on Hybrid Systems: Computation and Control (HSCC) Workshop on Embedded Software (EMSOFT) IEEE Conference on Decision and Control (CDC) IEEE Conference on Robotics and Automation (ICRA) …
International Workshop on Hybrid Systems: Computation and Control
University of PennsylvaniaMarch, 2004
http://www.seas.upenn.edu/hybrid/HSCC04/
44
End