ee 475 lecture 02 - iowa state universityclass.ece.iastate.edu/nelia/ee475/lecture notes/ee 475...ee...
TRANSCRIPT
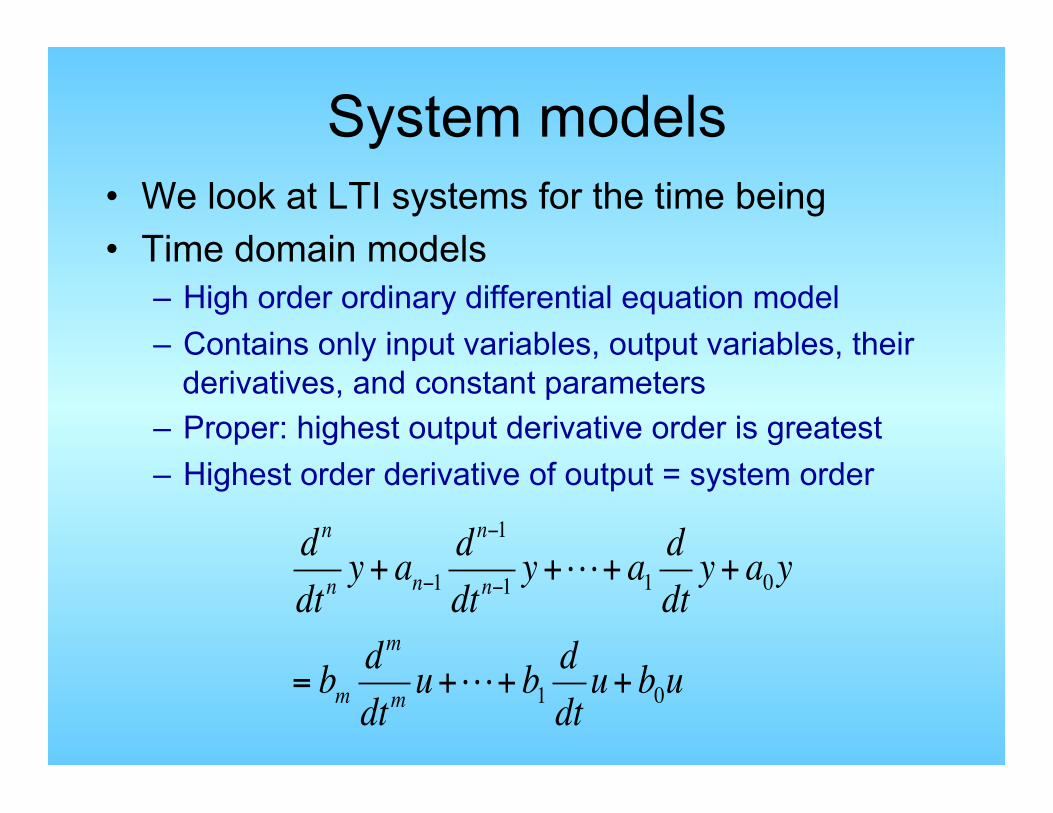
System models • We look at LTI systems for the time being • Time domain models
– High order ordinary differential equation model – Contains only input variables, output variables, their
derivatives, and constant parameters – Proper: highest output derivative order is greatest – Highest order derivative of output = system order
dn
dtny+ an−1
dn−1
dtn−1y++ a1
ddty+ a0y
= bmdm
dtmu++ b1
ddtu+ b0u
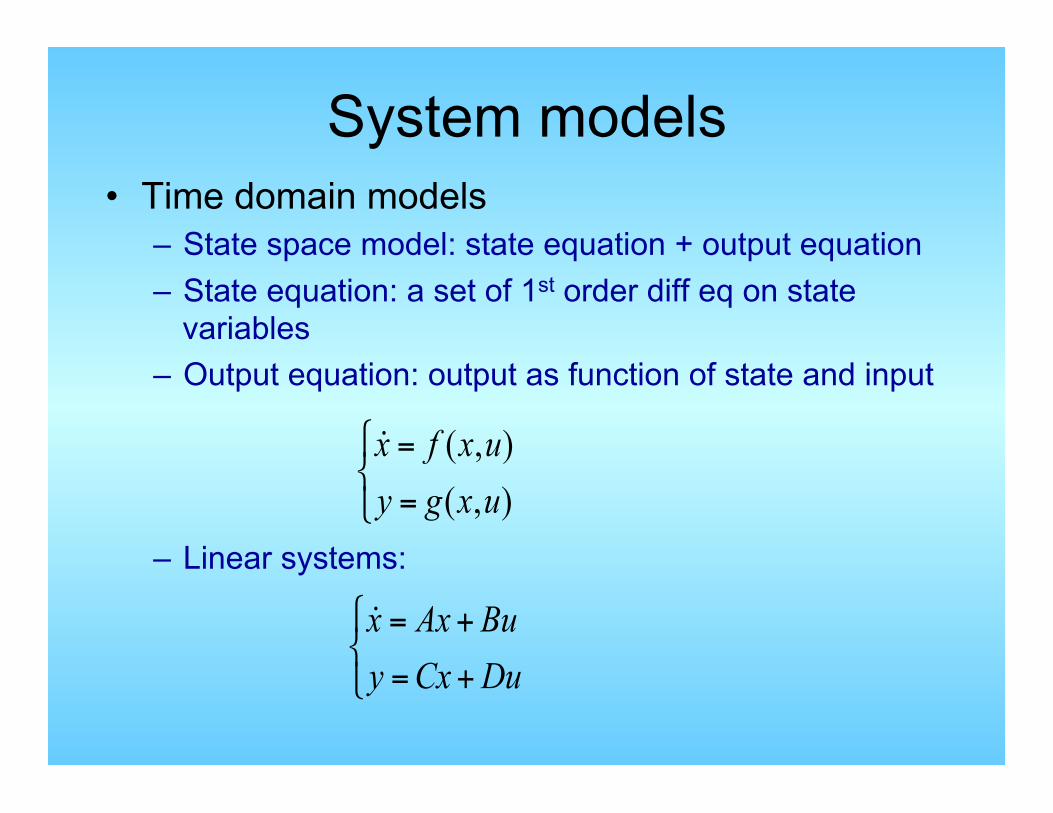
System models • Time domain models
– State space model: state equation + output equation – State equation: a set of 1st order diff eq on state
variables – Output equation: output as function of state and input
– Linear systems:
x = f (x,u)y = g(x,u)
!"#
x = Ax + Buy =Cx +Du
!"#

uyaydtday
dtday
dtd
n
n
nn
n
=++++−
−
− 011
1
1
ODE model to State space model
Let x1 = y, x2 = y, x3 = y, ...Then x1 = x2 , x2 = x3, x3 = x4 , ...
ddt
x1x2xn
!
"
#####
$
%
&&&&&
=
0 1 0 … 00 0 1 … 0 −a0 −a1 −a2 … −an−1
!
"
#####
$
%
&&&&&
x1x2xn
!
"
#####
$
%
&&&&&
+
001
!
"
####
$
%
&&&&
u
y = [ 1 0 0 ... 0]x + [0]u

uzazdtdaz
dtdaz
dtd
zbzdtdbz
dtdby
ubudtdbu
dtdb
yaydtday
dtday
dtd
n
n
nn
n
m
m
m
m
m
m
n
n
nn
n
=++++
+++=
+++=
++++
−
−
−
−
−
−
011
1
1
01
01
011
1
1
:Then
Let
:When
ODE model to State space model
m<n
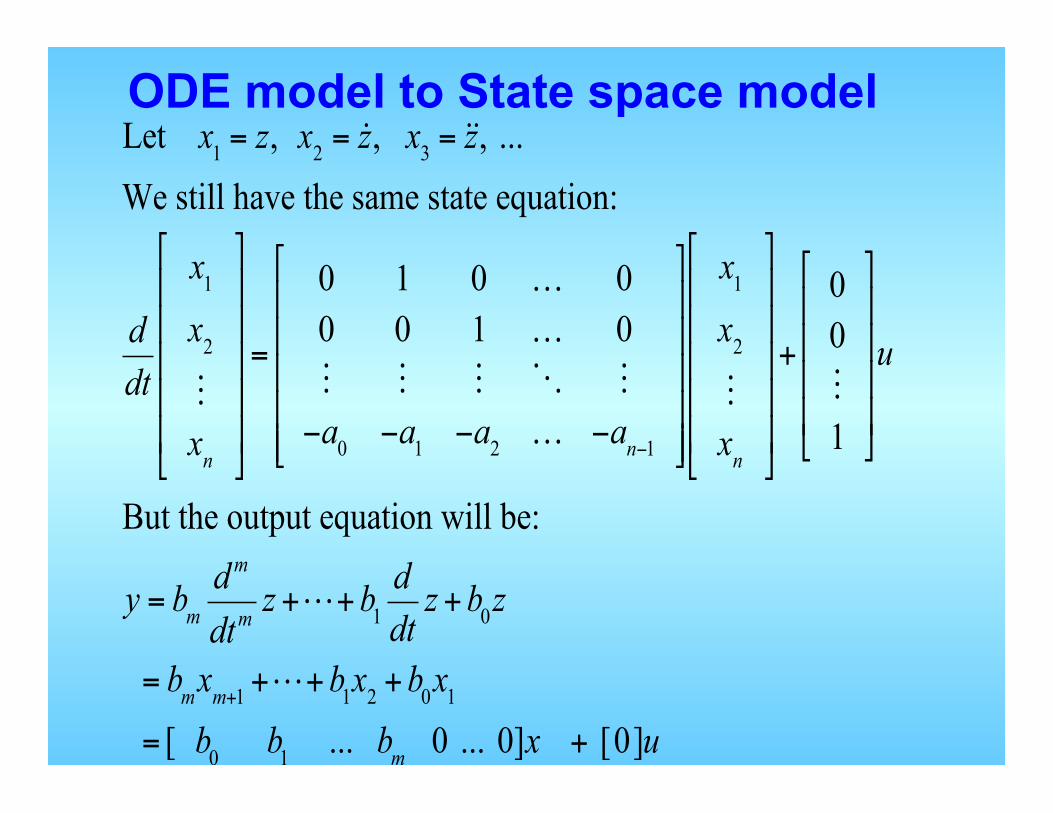
ODE model to State space model Let x1 = z, x2 = z, x3 = z, ...
We still have the same state equation:
ddt
x1
x2
xn
!
"
#####
$
%
&&&&&
=
0 1 0 … 00 0 1 … 0 −a0 −a1 −a2 … −an−1
!
"
#####
$
%
&&&&&
x1
x2
xn
!
"
#####
$
%
&&&&&
+
001
!
"
####
$
%
&&&&
u
But the output equation will be:
y = bmdm
dtmz ++b1
ddtz +b0z
= bmxm+1 ++b1x2 +b0x1
= [ b0 b1 ... bm 0 ... 0]x + [0]u

6
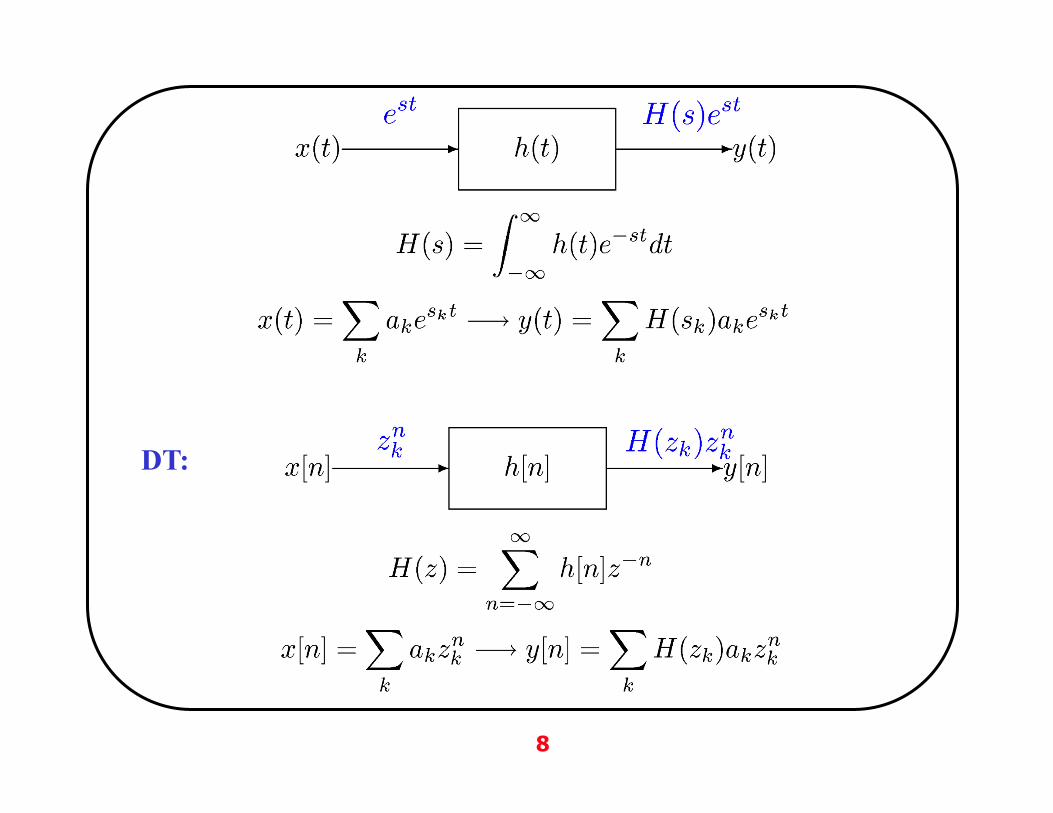
The eigenfunctions φk(t) and their properties (Focus on CT systems now, but results apply to DT systems as well.)
eigenvalue eigenfunction
Eigenfunction in → same function out with a “gain”
From the superposition property of LTI systems:
Now the task of finding response of LTI systems is to determine λk. The solution is simple, general, and insightful.

Complex Exponentials are the only Eigenfunctions of any LTI Systems
eigenvalue eigenfunction
eigenvalue eigenfunction
that work for any and all
8
DT:

9
Transfer Function
Transfer Function
Transfer function from x to y is the gain fromX(s) to Y(s), that is, it is the ratio ofLaplace transform of y to Laplace transform of x :
Y (s)X(s)
=L y(t)[ ]L x(t)[ ]
=Δ
H (s), or G(s),
Then: Y (s) = H (s)X(s)
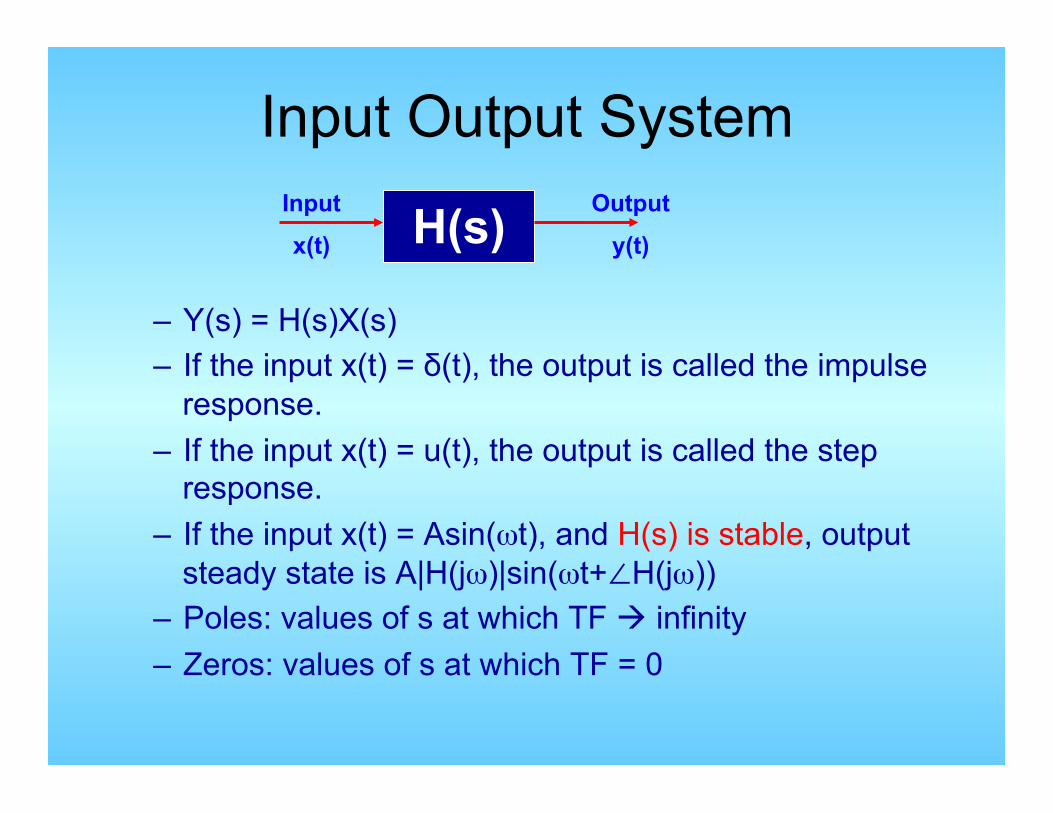
Input Output System
– Y(s) = H(s)X(s) – If the input x(t) = δ(t), the output is called the impulse
response. – If the input x(t) = u(t), the output is called the step
response. – If the input x(t) = Asin(ωt), and H(s) is stable, output
steady state is A|H(jω)|sin(ωt+∠H(jω)) – Poles: values of s at which TF à infinity – Zeros: values of s at which TF = 0
Input
x(t)
Output
y(t) H(s)

Example: controller
• Proportional controller: C(s) = KP =const • Integral controller: C(s) = KI/s • Derivative controller: C(s) = KDs • PI controller: C(s) = KP + KI/s • PD controller: C(s) = KP + KDs • PID controller: C(s) = KP + KI/s + KDs
controller C(s)
E(s) U(s)
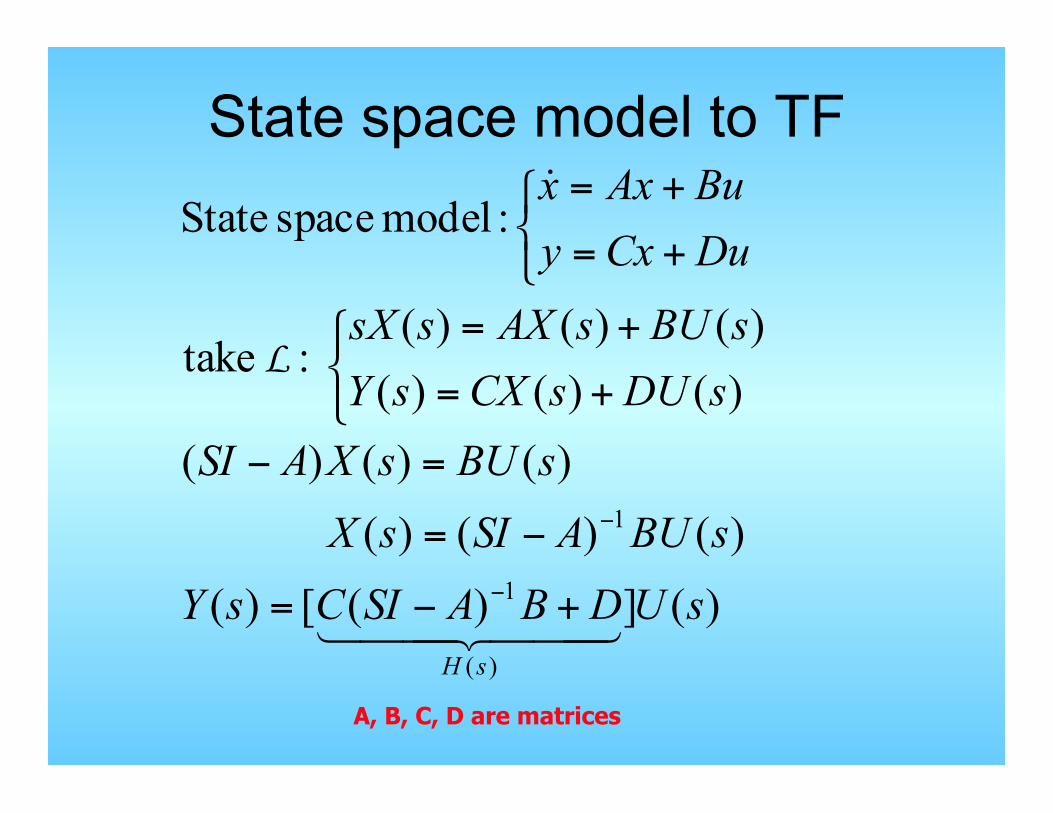
State space model to TF
)(])([)()()()(
)()()()()()()()()(
: take
:model space State
)(
1
1
sUDBASICsYsBUASIsX
sBUsXASIsDUsCXsYsBUsAXssX
DuCxyBuAxx
sH
+−=
−=
=−⎩⎨⎧
+=
+=
⎩⎨⎧
+=
+=
−
−
L
A, B, C, D are matrices

Block diagrams computa1ons
CONTROLLER CONTROLLED DEVICE
FEEDBACK ELEMENT
+ ++
-

Block Diagrams • A line is a signal • A block is a gain • A circle is a sum • Due to h.f. noise,
use proper blocks: num deg ≤ den deg • Try to use just horizontal or vertical lines
– Use additional “ ” to help e.g.
Σ
x s +
+
-
+
y
z
G x yy = Gx
z y
x s
- +
+
s = x + z - y
Σ

Block Diagram Algebra • Series:
• Parallel:
G1 x y
G2 G1 G2 x y
G1
x y
G2 +
+G1 + G2
x yè
è
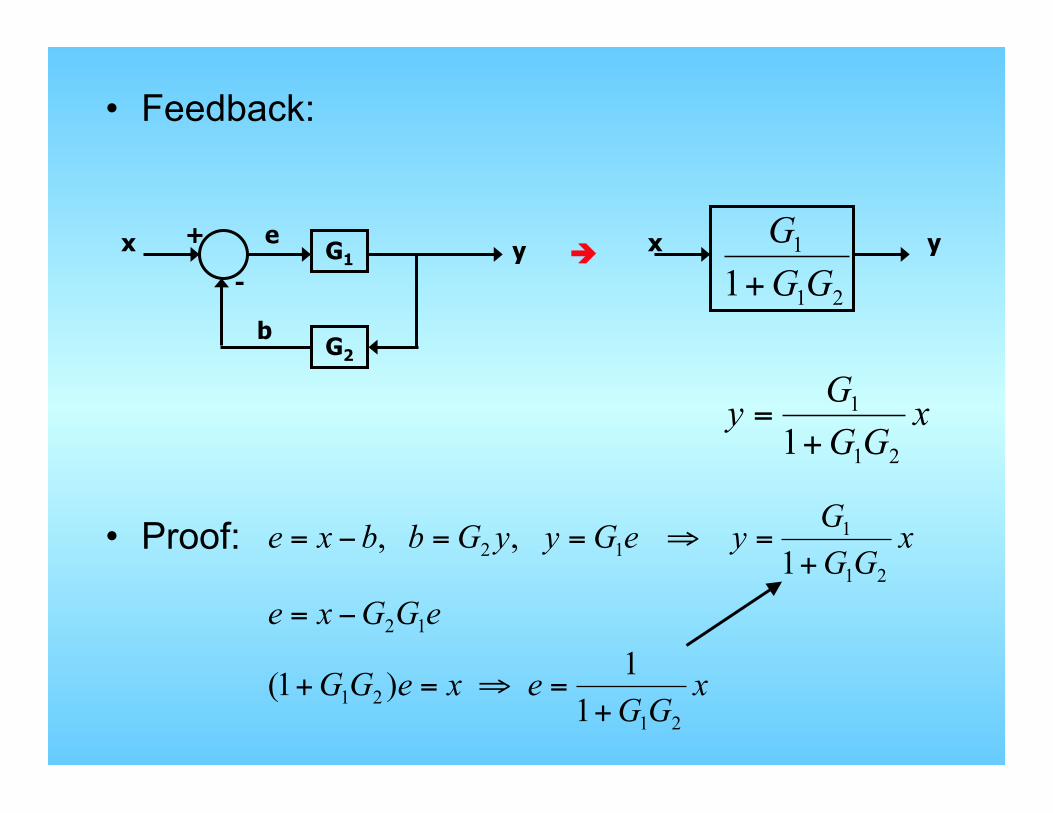
• Feedback:
• Proof:
xGG
Gy21
1
1+=
G1 x y
G2
-
+
b
e x y
21
1
1 GGG
+
xGG
exeGG
eGGxe
xGG
GyeGyyGbbxe
2121
12
21
112
11)1(
1,,
+=⇒=+
−=
+=⇒==−=
è

G1
G2
+
+
21
1
1 GGG
−
-
+
1
1
dn
2
2
dn 2121
21
ddnndn+
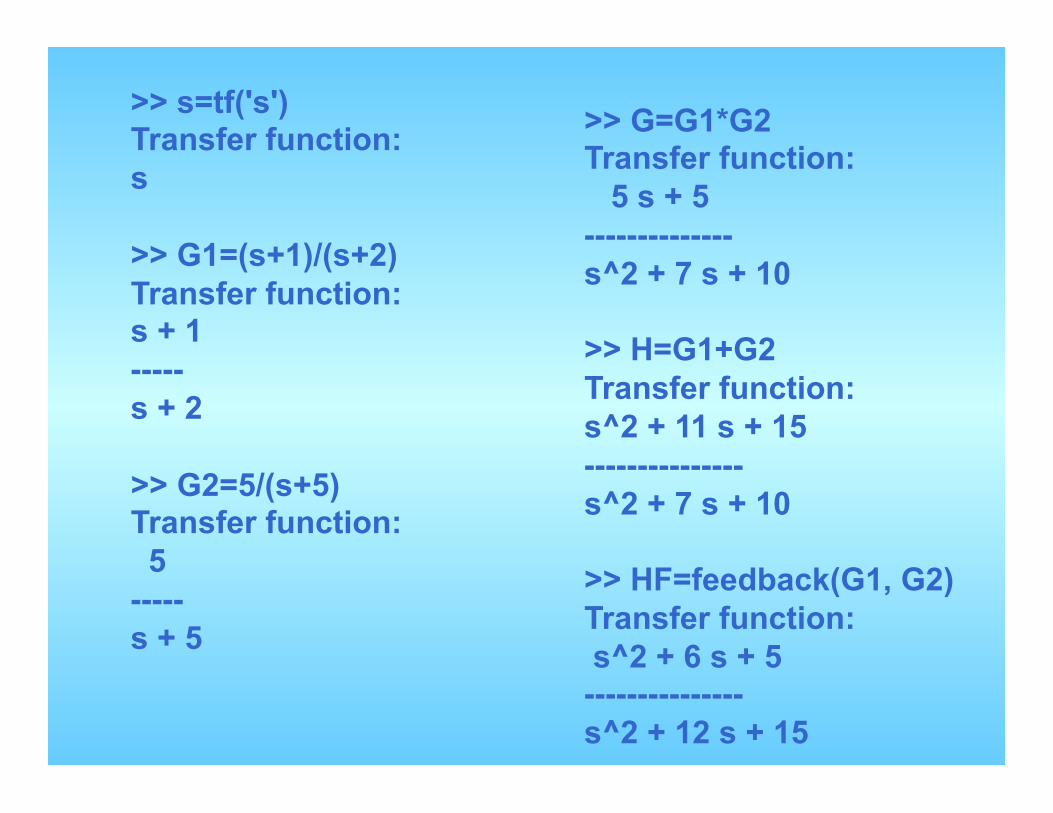
>> s=tf('s') Transfer function: s >> G1=(s+1)/(s+2) Transfer function: s + 1 ----- s + 2 >> G2=5/(s+5) Transfer function: 5 ----- s + 5
>> G=G1*G2 Transfer function: 5 s + 5 -------------- s^2 + 7 s + 10 >> H=G1+G2 Transfer function: s^2 + 11 s + 15 --------------- s^2 + 7 s + 10 >> HF=feedback(G1, G2) Transfer function: s^2 + 6 s + 5 --------------- s^2 + 12 s + 15
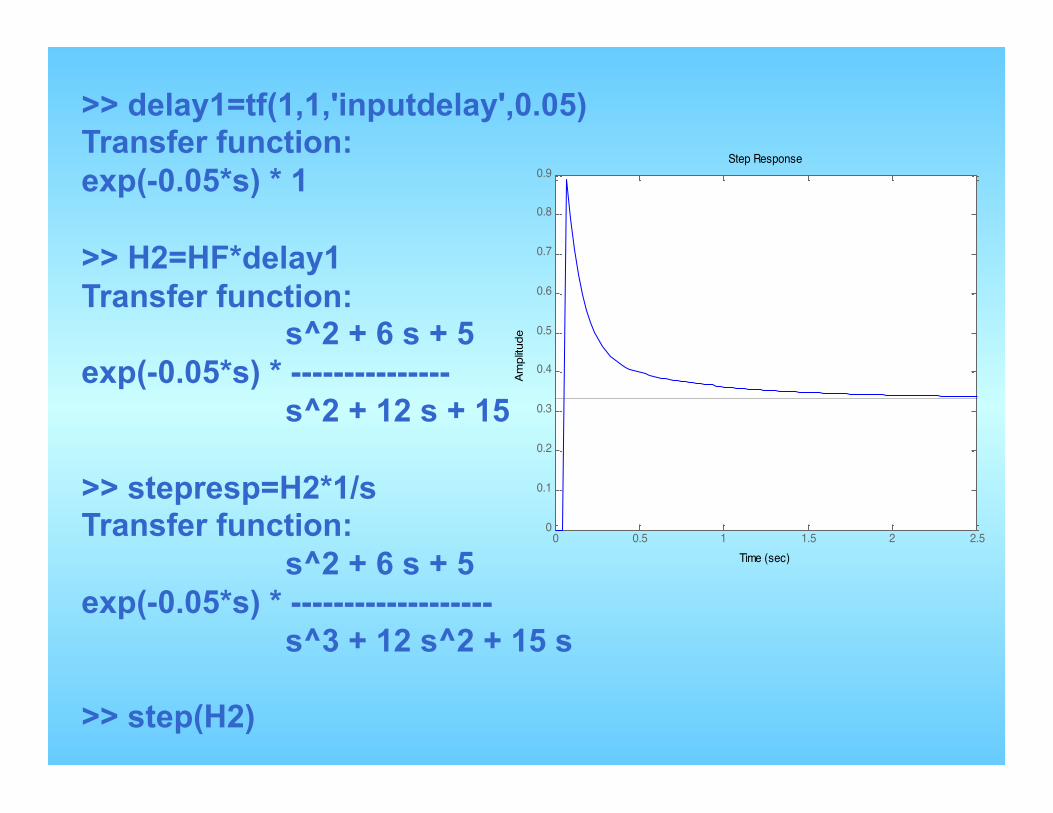
>> delay1=tf(1,1,'inputdelay',0.05) Transfer function: exp(-0.05*s) * 1 >> H2=HF*delay1 Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * --------------- s^2 + 12 s + 15 >> stepresp=H2*1/s Transfer function: s^2 + 6 s + 5 exp(-0.05*s) * ------------------- s^3 + 12 s^2 + 15 s >> step(H2)
0 0.5 1 1.5 2 2.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9Step Response
Time (sec)
Ampl
itude

Quarter car suspension
kbs +m1
s1R(s) y+
- s1
Series
2mskbs +R(s) +
-
yFeedback
kbsmskbs++
+2
R(s) y
kbsmskbssHTF++
+== 2)(
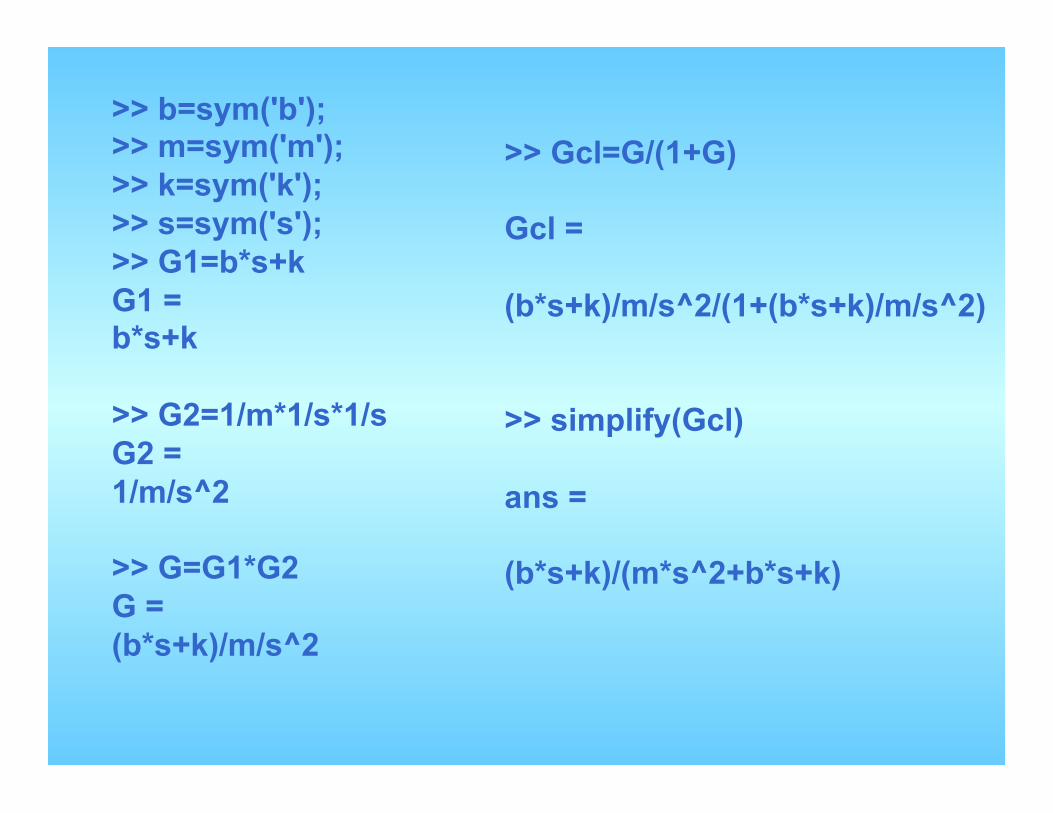
>> b=sym('b'); >> m=sym('m'); >> k=sym('k'); >> s=sym('s'); >> G1=b*s+k G1 = b*s+k >> G2=1/m*1/s*1/s G2 = 1/m/s^2 >> G=G1*G2 G = (b*s+k)/m/s^2
>> Gcl=G/(1+G) Gcl = (b*s+k)/m/s^2/(1+(b*s+k)/m/s^2) >> simplify(Gcl) ans = (b*s+k)/(m*s^2+b*s+k)
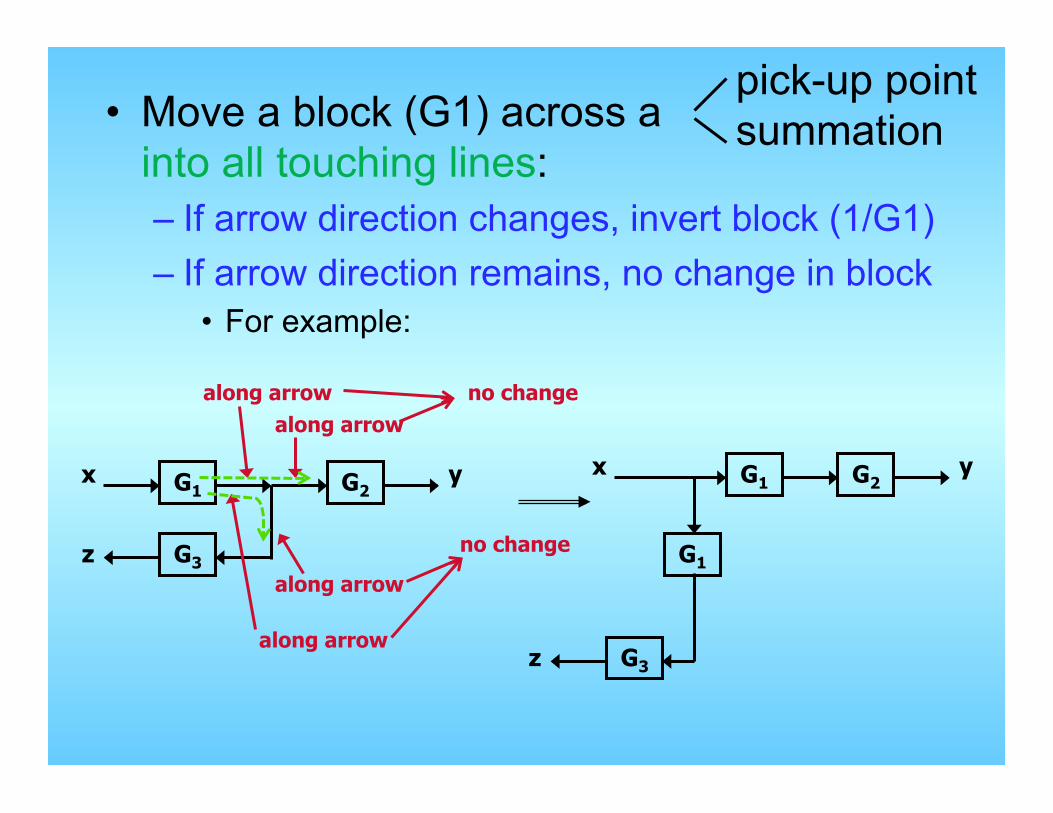
• Move a block (G1) across a into all touching lines: – If arrow direction changes, invert block (1/G1) – If arrow direction remains, no change in block
• For example:
pick-up point summation
G1 x yG2
G3 z
along arrow along arrow
along arrow
along arrow
no change
no change
G1 x yG2
G3 z
G1

G1 xy
G2
G3 z
G1 xy
G3 z
è G2
1/G2
G1 xy
G2
G3 z
è G1 x
yG2 G3
z
1/G3
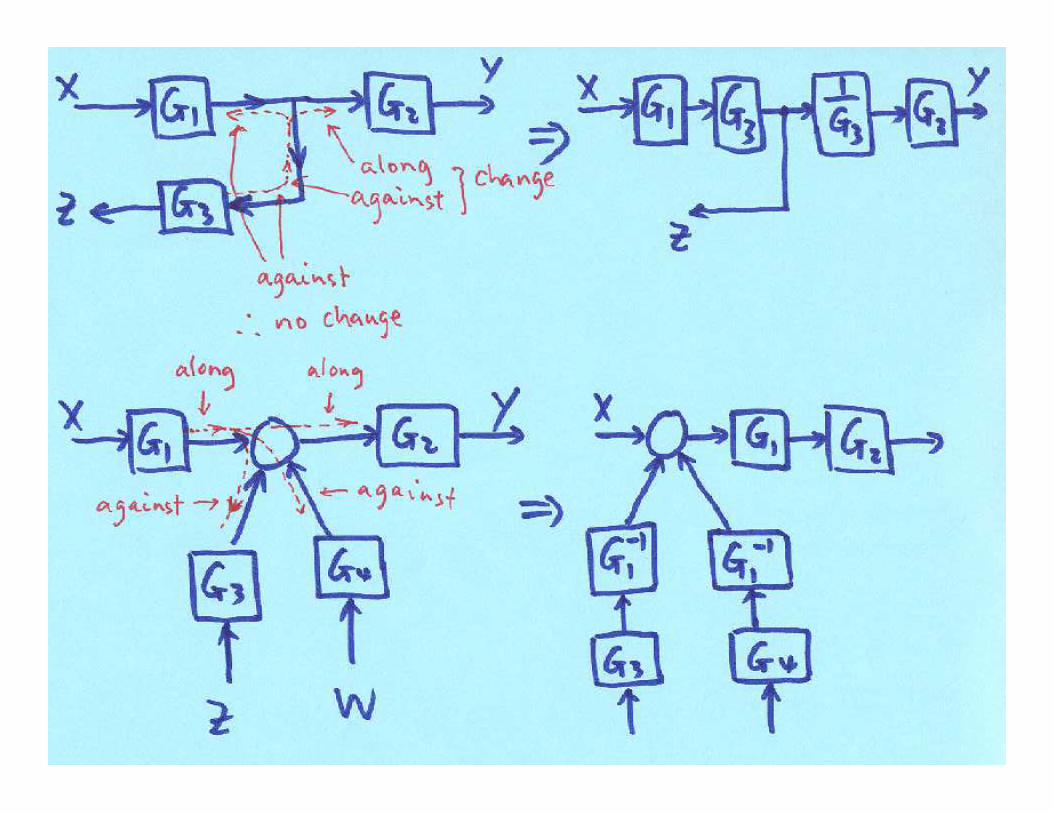
against, against
against along


11
1RsL + Cs
1
22
1RsL +
U y+-
2R+-
Vc
I2
I1
11
1RsL + Cs
1
22
1RsL +
U y+-
2R+-
Vc
I2 11 RsL +
)(1
11 RsLCs +22
1RsL +
U y+-
2R+ -
11 RsL +
1)(1
11 ++ RsLCs 22
1RsL +
11 RsL +
U y+ -
2R
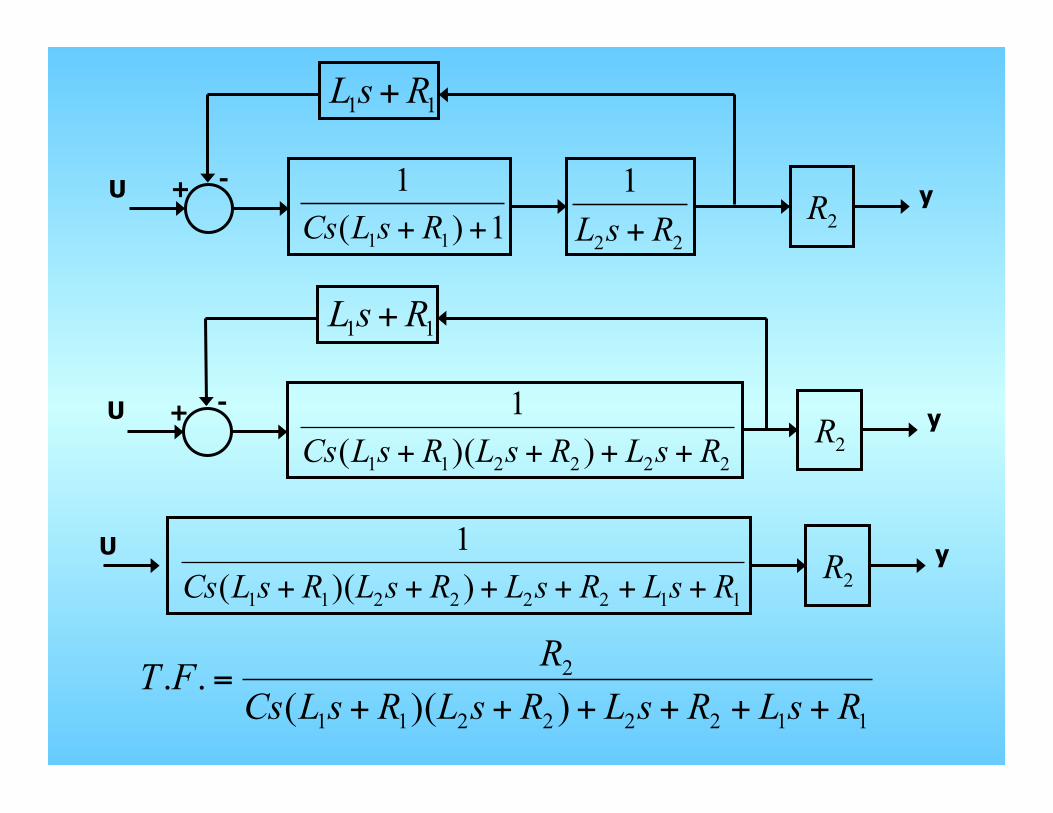
222211 ))((1
RsLRsLRsLCs ++++
11 RsL +
y+ -
2RU
11222211 ))((1
RsLRsLRsLRsLCs ++++++y
2RU
11222211
2
))((..
RsLRsLRsLRsLCsRFT
++++++=
100 12
ss+
+10( 20)s s +
U Y+
-
+
-
25s +
+
+
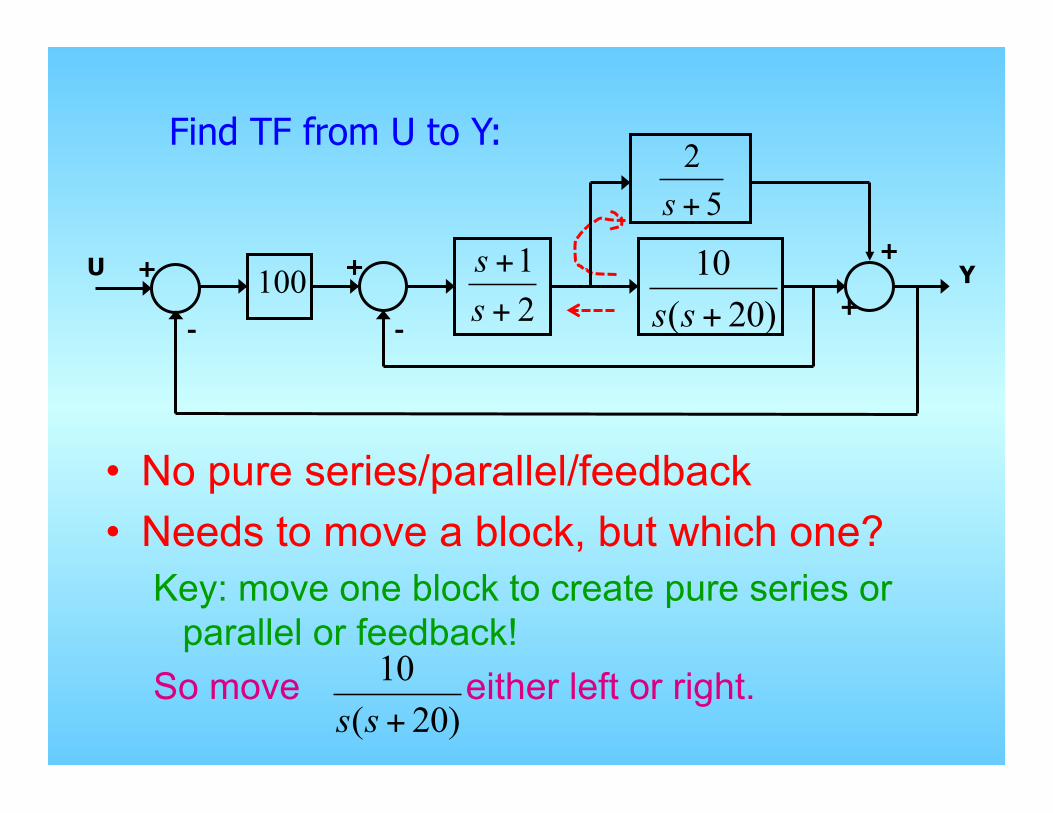
Find TF from U to Y:
• No pure series/parallel/feedback • Needs to move a block, but which one?
Key: move one block to create pure series or parallel or feedback!
So move either left or right. 10( 20)s s +
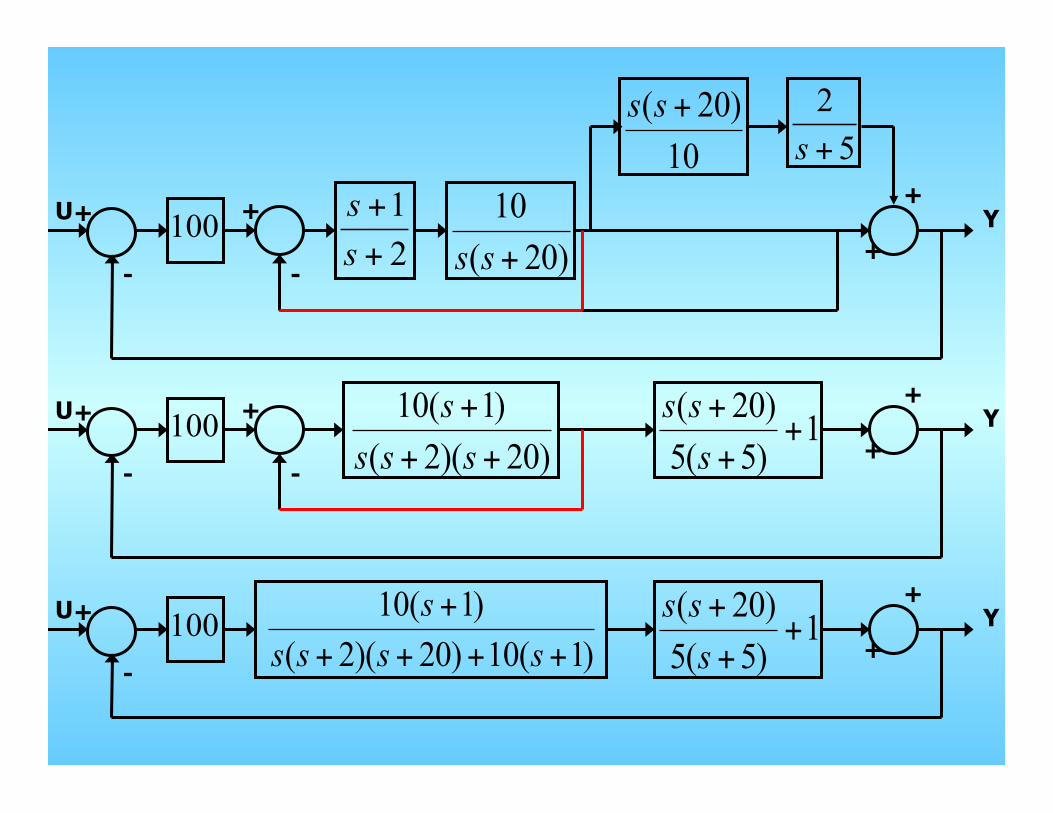
100 12
ss+
+10( 20)s s +
U Y+
-
+
-
25s +
+
+
( 20)10
s s +
100 10( 1)( 2)( 20)
ss s s
+
+ +U Y+
-
+
-
+
+
( 20) 15( 5)s ss+
++
100 10( 1)( 2)( 20) 10( 1)
ss s s s
+
+ + + +U Y+
-
+
+
( 20) 15( 5)s ss+
++
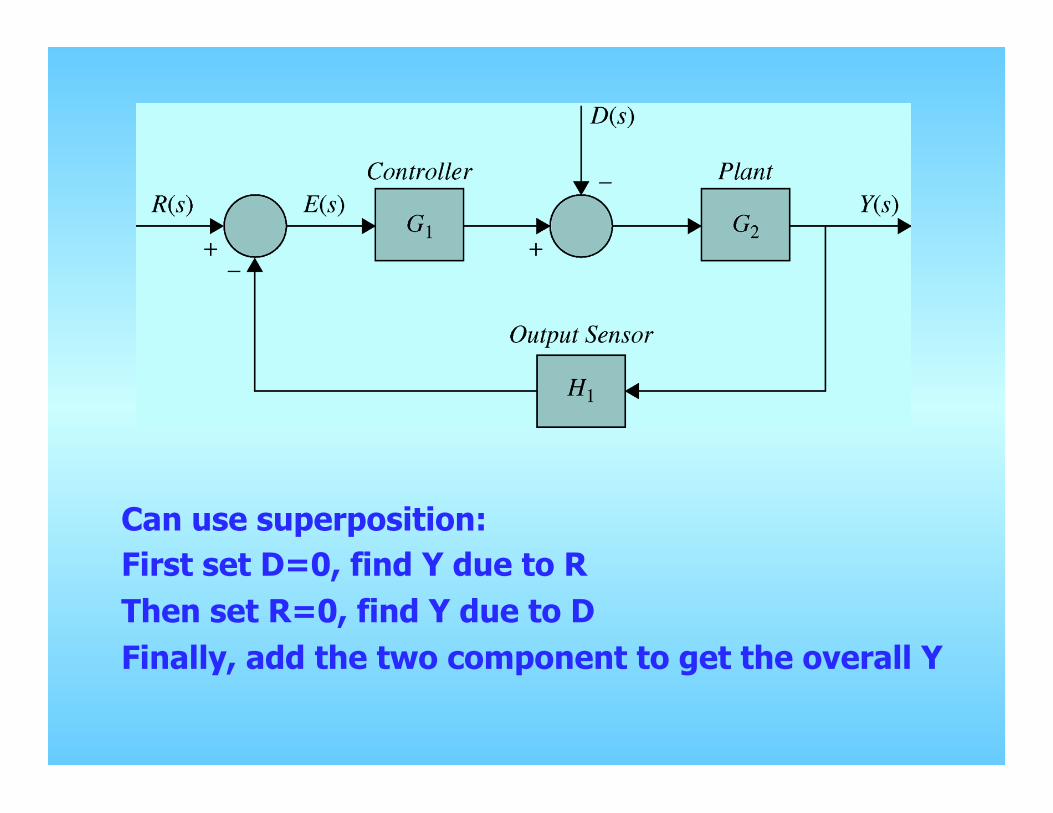
Can use superposition: First set D=0, find Y due to R Then set R=0, find Y due to D Finally, add the two component to get the overall Y

1 21
1 2 1
( ) ( )1GGY s R sGG H
=+
First set D=0, find Y due to R
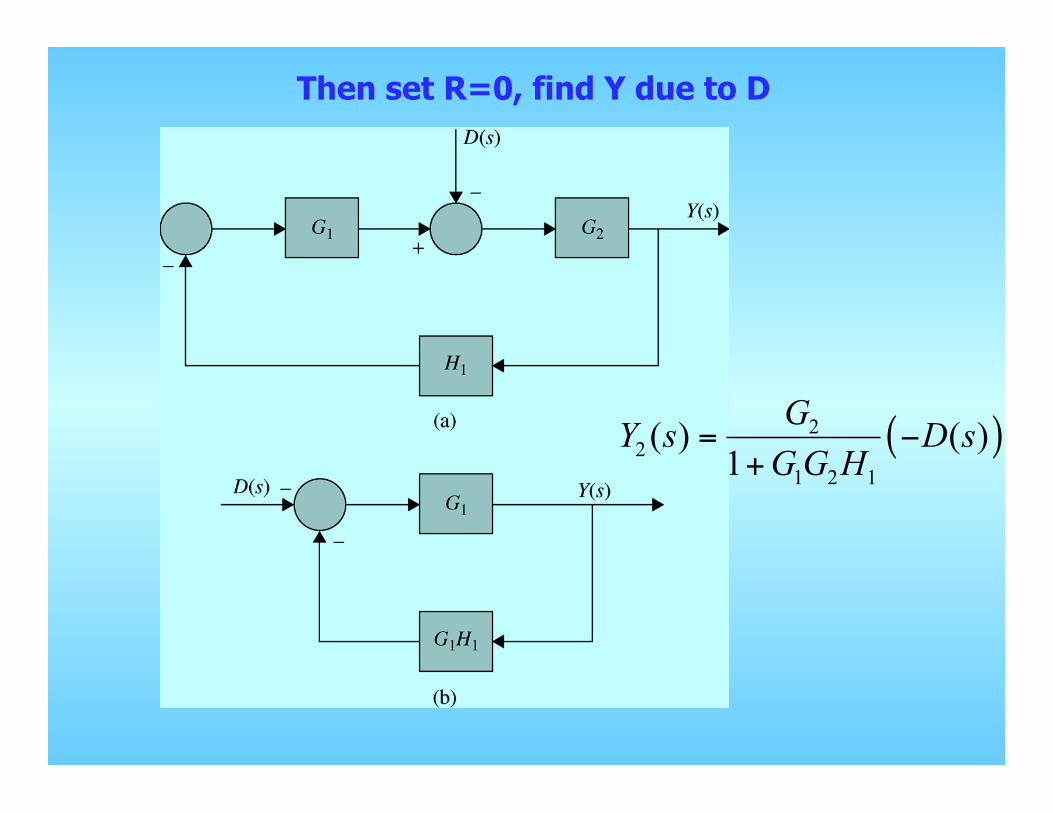
G2
( )22
1 2 1
( ) ( )1
GY s D sGG H
= −+
Then set R=0, find Y due to D
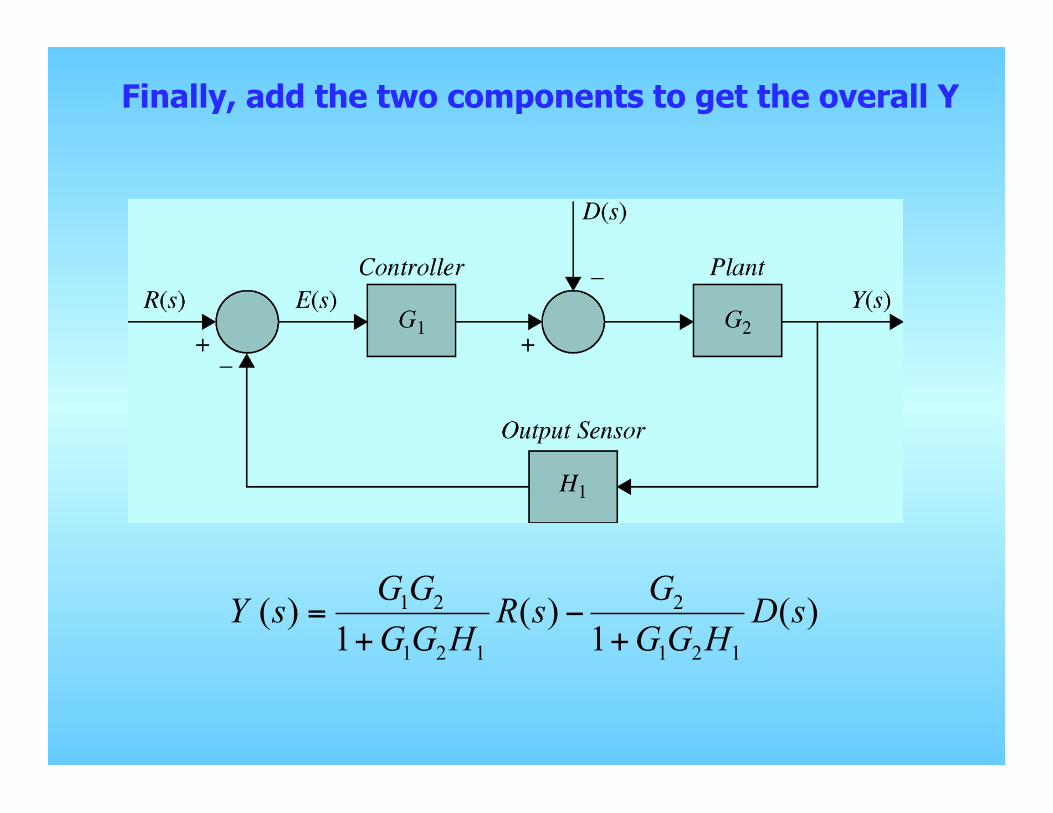
Finally, add the two components to get the overall Y
1 2 2
1 2 1 1 2 1
( ) ( ) ( )1 1GG GY s R s D sGG H GG H
= −+ +