ecen 670 mini-conference29-nov.-2011everett bryan, bryce pincock velocity estimation using the...
Post on 21-Dec-2015
215 views
TRANSCRIPT

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Velocity Estimation using the Kinect Sensor
Everett Bryan
Bryce Pincock
29-Nov.-2011

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Outline
Problem Statement Noise Characterization Velocity Estimation Results Conclusion

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Problem Statement
The Microsoft Kinect is a new RGB-D sensor Great alternative to stereo cameras No available models of noise
Robots operating in GPS-denied environments require external proximity sensors to estimate its states Safe and desired operation
Characterize noise in Kinect and apply to a linear velocity estimator

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
Data Collection Error analysis Noise analysis Verification of Noise Models
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
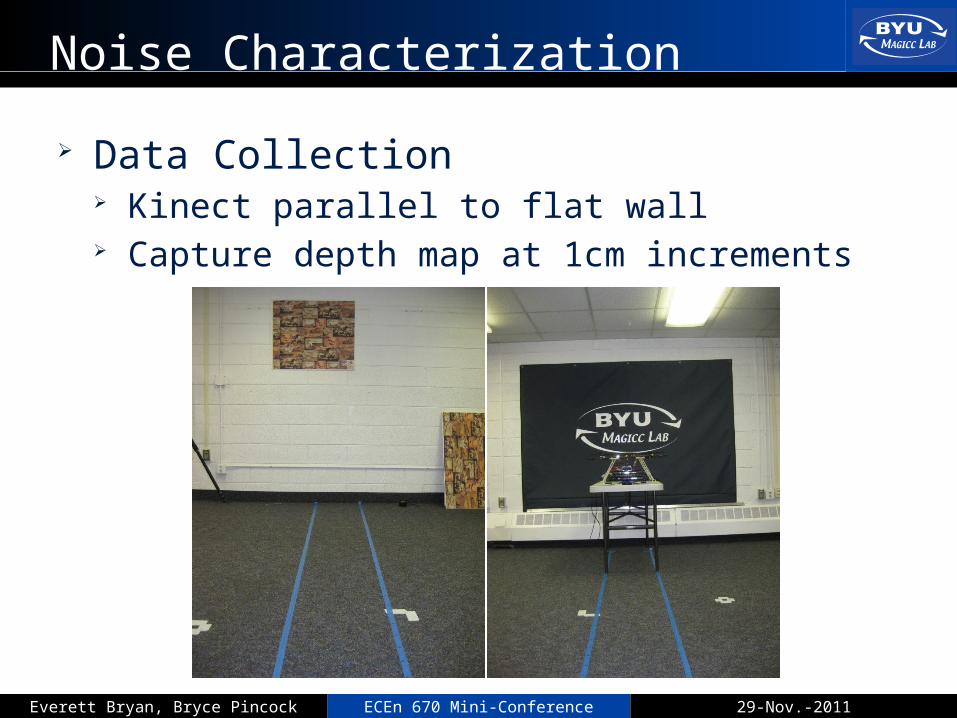
Data Collection Kinect parallel to flat wall Capture depth map at 1cm increments
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
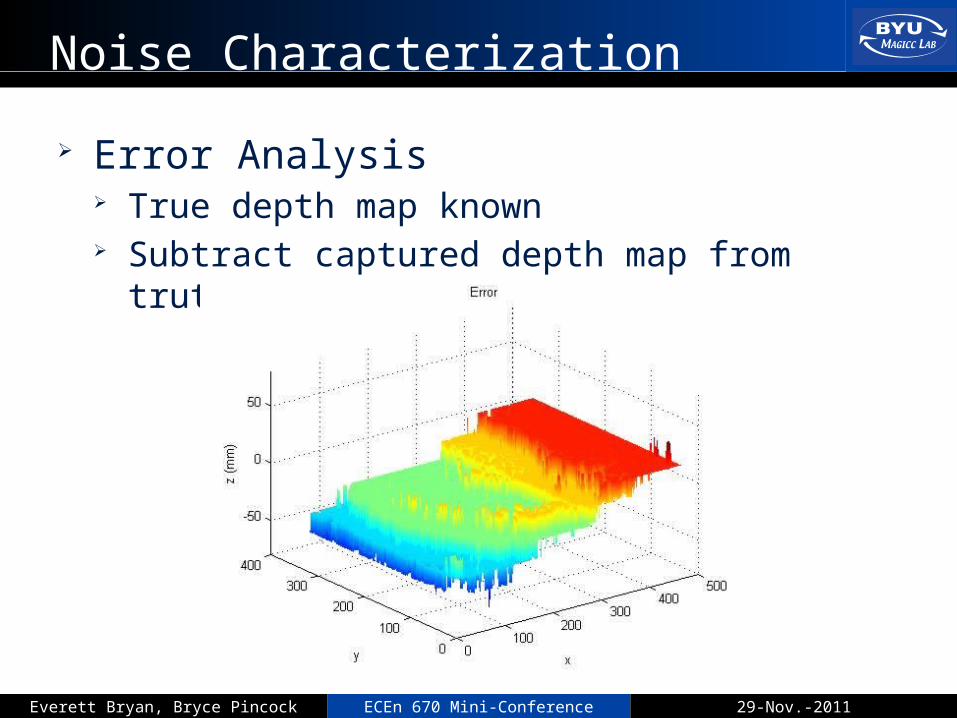
Error Analysis True depth map known Subtract captured depth map from truth
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
Noise Analysis Deterministic Noise Random Noise
)( )( mmzfMM truthmeasured
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
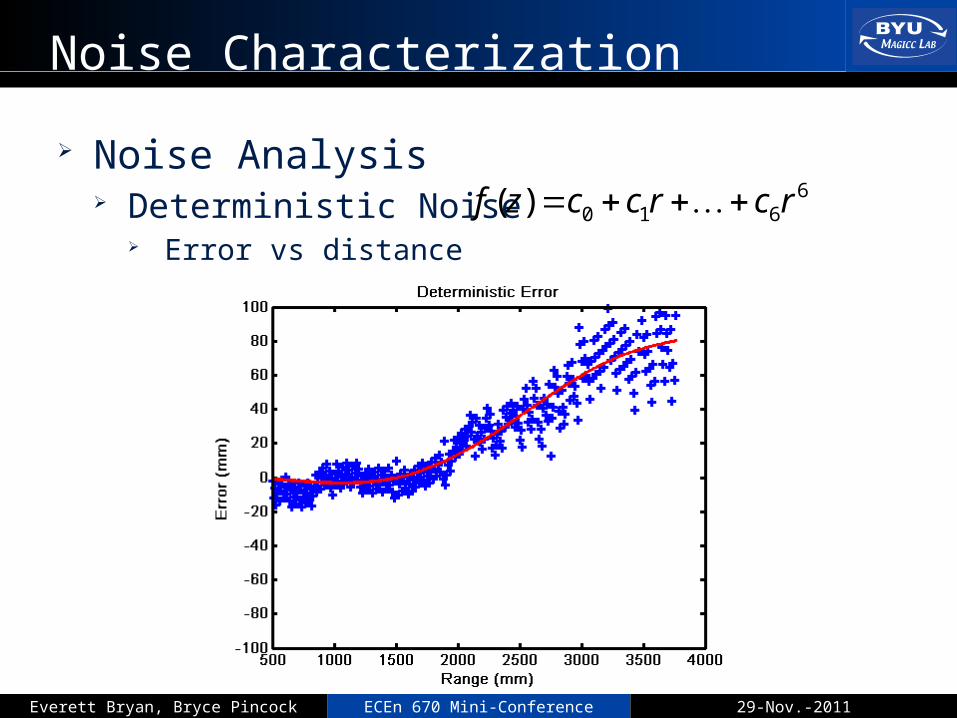
Noise Analysis Deterministic Noise
Error vs distance
6610)( rcrcczf

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
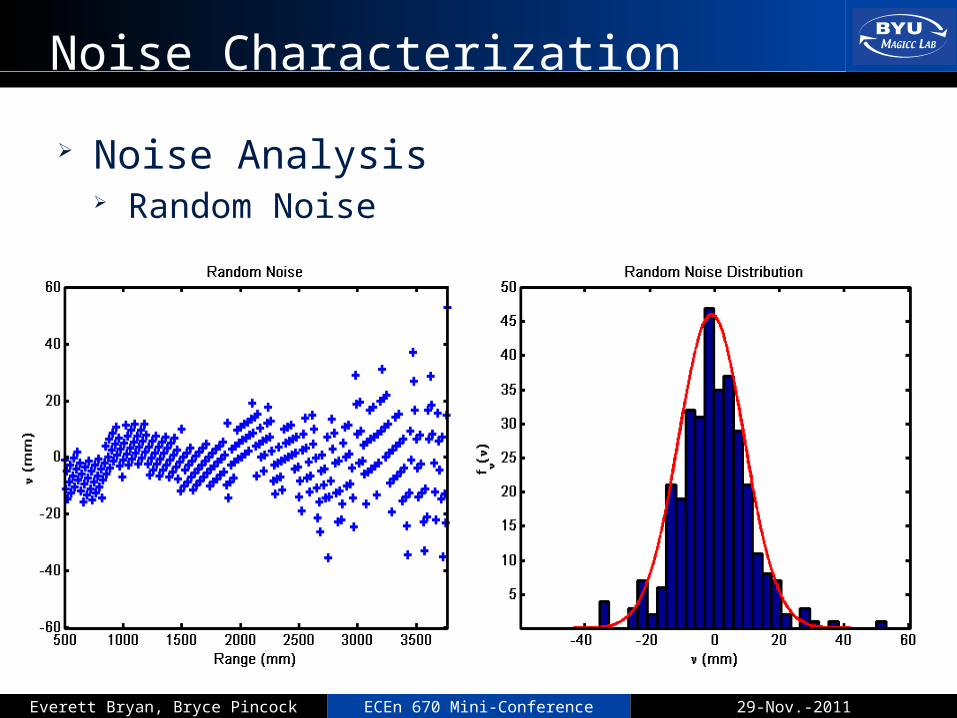
Noise Analysis Random Noise
)(zfMM truthmeasured
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
Noise Analysis Random Noise
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Noise Characterization
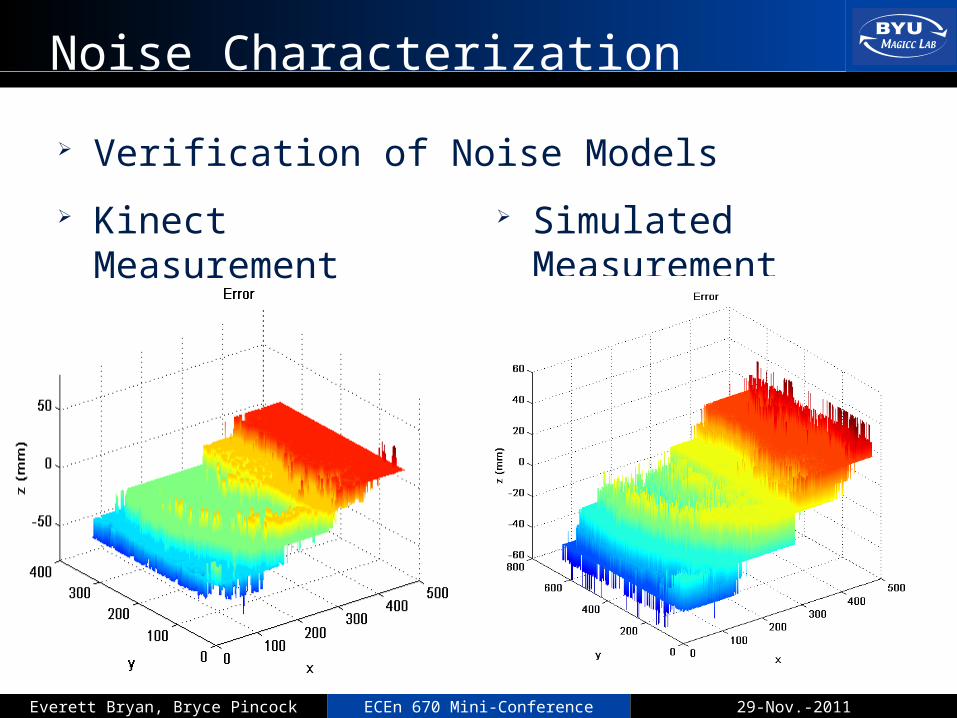
Kinect Measurement Simulated Measurement
Verification of Noise Models
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Velocity Estimation
AXY
1][ Xt RYXEA
)/( 1 smt
rrV tt
Improve velocity estimates using Minimum Mean Squared Error (MMSE) linear estimator
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Velocity Estimation
Track features in successive frames Simplify to tracking the nxn center pixels in the depth
map Requires no solution to complex feature extraction and data
correspondence Take average value from nxn pixels as rt
)/( 1 smt
rrV tt

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
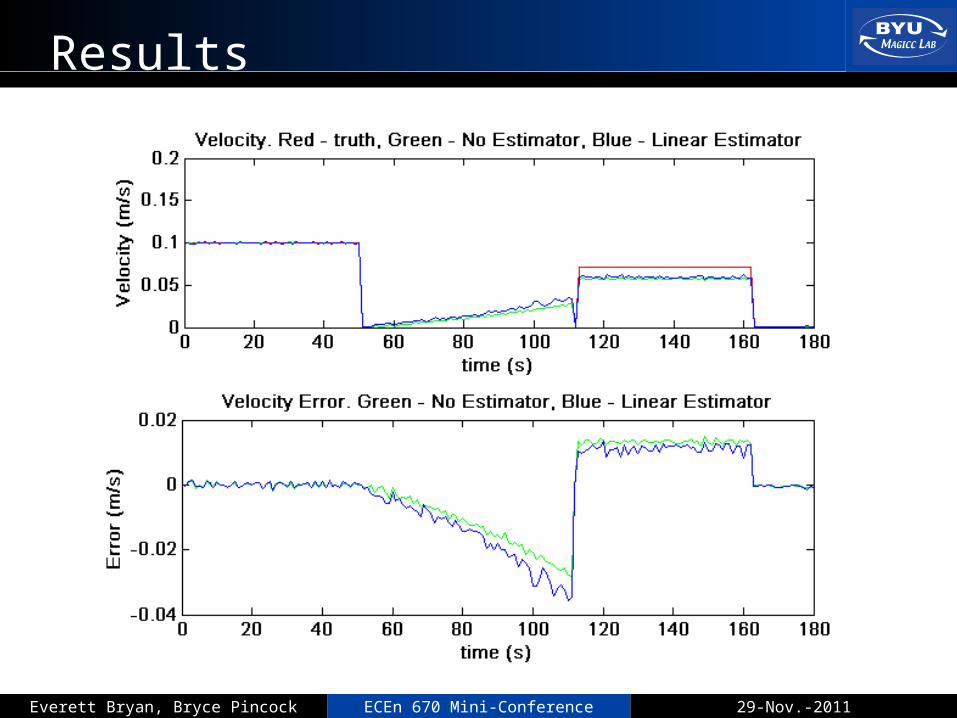
Results
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Results

ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Conclusion
Successfully characterized noise within the Kinect Successfully applied a MMSE linear estimator to
estimate velocity
ECEn 670 Mini-Conference 29-Nov.-2011Everett Bryan, Bryce Pincock
Thank you