ebene projektive kinematik iii
TRANSCRIPT
Ebsne projektive Kineniatik III*)
Von JURGEN TOLKE in Stuttgart
(Eingegangen am 11. 4.1973)
Wahrend bisher (Teil I, 11) fast ausschliealich die Bahnkurven im Vorder- grund unserer Betrachtungen lagen, beschaftigen wir uns im siebten Abschnitt mit bei Bewegungen mitgefuhrten Kurven und ihren Hcllbahnen. Ihnen laljt sich jeweils eine absolute Invariante zuordnen, die (projektive) Rollgleitzahl.
Sie gestattet zwei geometrische Deutungen : I ) In der Krummungstheorie 1. Art fur spezielle harmonische Bewegungen, 2) I n der Krummungstheorie 2. Art fur beliebige Bewegungen - jeweils als ein Doppelverhaltnis von vier geometrisch ausgezeichneten Punkten.
Hervorzuheben ware noch die geometrische Deutung von sechs der im zweiten Abschnitt erklarten vierzehn Halbinvarianten. Lasch formuliert bedeutet ihr Verschwinden das Zusamrnenfallen der Polbahnkrummungsmittelpunkte 1. und 2. Art.
Die beiden letzten Abschnitte behandeln Differentiationsfragen von dritter Ordnung. Im achten Abschnitt erklaren wir die Kreispunktkurve und die Ball- schen Punkte und untersuchen hiermit zusammenhangende Fragen. Im letzten Abschnitt neun versuchen wir eine Ubertragung der vom Verfasser in der eukli- dischen Kinematik ejngefuhrten ,S~"~-Bewegungsvorgange. Auch hier zeigt sich - neben neueri Beitragen -, daB jene Eigenschaften einen wesentlich umfang- reicheren Geltungsbereich besitzen.
7. Hullbahnen. Rollgleitzahl
Sei k eine in der Gangebene 3 befestigte Kurve. Bei unserer projektiven Bewegung @(t) wird die Kurve k mitgefuhrt, d. h. wir erhalten in der Rastebene x eine Kurvenschar, welche im allgemeinen eine Einhullende E besitzt. Diese Einhiillende heiBe die Hiillbahn von k bei der Bewegung B( t ) .
Zum Parameterwert t beruhre h ihre Hullbahn im Punkte X . 111 Abhangigkeit vom Parameter bewegt sich dieser Punkt X einerseits auf der Kurve k und an-
*) Fur Bezeichnungen und Literaturangaben verweisen wir auf die beiden vorangegangenen Teile I, 11 (Math. Nachr. 63, 167-185, 187-196 (1974)).

222 Tolke, Ebene projektive Kinematik
dererseits auch auf der Hullbahn k . Soinit gilt
(1) C ? = p . x + I W * i
oder mit (1.4’) fiir il i 1
Fur eine gegebene Kurve I! merclen p wid A Punktionen vom Parameter sein, wobei aber nur I. eine geometrische Bedeutung zukoinnit. Denn gegenuber Umnormungen (1 .?) bzw. Paranietertransforiiiatioiien (1.6) ist il absolut’ invariant, wahrend sich p hierbei gemaB
e = p + ~ (A - 1 ) bzw. p“ = p-’(t) p e
(2)
verhalt. IVir nennen il = I . ( t ) die projektive Rollgleitznhl. Dabei haben wir die Bezeichnurig I. so gewahlt, daB wie in1 Euklidischen auch liier die beiden Pol- bahnen pi , p i ( i = l , 2, 3) durch A = l gekeniizeichnet sind.
Als naclistes wollen wir die Definition des (i)-Krummungsmittelpunktes 2 . S r t fiir Bahnkurven auf beliebige Kurven erweitern. Dazu sei wieder k eine in 3 befestigte Kurve uiid k ihre Hullbahn, welche sich zum betrachteten Para- meterwert in X beriihren. Dann geben wir die folgende
Definition. Bei einer projektiven Bewegung heil3t der Polstrahl
(3) [zpiz] = 0 bzw. [Zijp] = 0
die (i)-Normzle von k bzw. k im Punkte X an der betrachteten Stelle. Die Hull- kurve dieser (i)-Xormalen nennen wir die (i)-EvoZzde; sie ist der Ort der (i)- h-riimmungsmittelpzllnkte 2. Art Y J k ) bzw. Y;(I!).
Differenziert nian (3) unter Benchtung der jeweiligen Hullbedingung
[ i p ; ~ ] = 0 bzw. [Z13,7] = 0 ,
so folgt fur die (i)-I(runiinungsinittelpuiikte 2 . Art
(4) bZW.
y i p ) = [$ppx] * pi - [pipix] * z
y i ( k ) = ([:ipi.] - [Ocj )2pjp iz ] ) - pi - [p;p;c] * .%’ . Bemerkungen. 1 ) Die obeii gegebene Definition versagt fur die Momentanpole,
wir kommen darauf zuruck ! 2 ) Fur alle auf der Polbahntangente von pi gelegerie Beriihryunkte X fallen
die (i)-Krummungsmittelpunkte Y J k ) und z’,(L) mit dem Pol Pi zusammen. Wir betrachten in solchen Fallen im folgenden nur die beiden anderen (j)-Krum- mungsmittelpunkte.
Im zulassigen Entartungsfall, daB die Kurve k ein Punkt X , also die Hull- bahn k seine Bahnkurve ist, folgt aus (4)
( 5 ) YJI!) = X und yi(k) = [ ~ ( ~ , z $ ~ p ~ . x ] . p i - [pipix] - z .

Tolke, Ebene projektive Kinematik 2 23
Vergleicht man dies init (5.1) und beachtet, daB dort .i: als Abkiirzung von (3.6’) aufzufassenwar, so sieht man, da13 in der obigen Definition die des (i)-Krummungs- mittelpunktes 2. Art einer Bahnkurve rnitenthslten ist.
Welche Beziehung besteht nun zwischen Y i ( k ) und Yi(k) ? Unterdriickt man den Faktor [@ipix]j, so folgt
(6) und damit der
Satz 23. Die (i)-Krurnmu?agsmittelpunkte 2 . Art Y , (k ) , YJk) der Kurven k , k irn Eingriffspunkt X an der Stelle t , wobei die Kurve k in der Gangebene befestigt ist und k die zugehorige Hullbahn bei der projektiven Bewegung B(t ) ist, entsprechen sich in der quadratischen Verwandtschnft (5.1 ).
Y i W (=) [qj,Yl(~)PjPiY,(w * Pi - [P,PiYi(k)I - Y i ( h
Hieraus folgt das wichtige
Korollar. Der (i)-Kriimmungsmittelpunkt 2. Art Y,(k) der Hullbahn k ist auch (i)-Krummungsmittelpunkt derjenigen Bahnkurve, die bei der Bewegung B(t) durch den (i)-Kriimmungsmittelpunkt 2. Art Y i ( k ) von k geht.
Die vier Punkte Pi, X, Yi(k), Yi(k) sind fur jedes i kollinear. Fur ihr Doppel- verhaltnis
8,: = D V ( P , X ; Y , ( k ) Y,(k) )
B, = D, = D3 = I
folgt mit (1’) sofort
(7 ) und damit der
Satz 24. Die projektive Rollgleitzahl 1 zweier Hullkurvenpuare kann in drei- facher Weise als Doppelverhaltnis gedeutet werden.
‘\.Vie bereits bemerkt, versagt die obige Definition der Kriimmungsmittel- punkte fur die Polbahnen. Nehmen wir in diesem Fall als Normale von pi bzw. pi die Polbahnnormale ( 2 . 5 ) der Rast- bzw. Gangpolbahn, SO laBt sich deren je- weiliger Hiillpunkt Ypi bzw. Y F ~ als Kriimmungsmittelpunkt 2. Art von p i bzw. ij, bezeichnen. Den Polbahnen wird also jeweils nur ein Kriimmungsmittelpunkt 2. Art. zugeordnet. Man findet dafiir die Darstellung
3 3 2
1 1 3 7 3 1 Ypi = ($I$ - B;”/Z + hi3) PI - 28XB?P2 + 2B,B,BiP3
Yp2 = 2B,B,B,Pi - (BX - tw + hi3) P2 - 2B2B2BaP3
YP3 = - 283838:3p1 + 283r6383PZ + (BB85 - PSI; + hi2)1)3
y- pi = ypi + (- 1 )i+ BfBl (qj) - qk)) Pi >
(8) 1 1 2 2 1 1
bzw.
wobei j < k und j + i =+ k sein soll. Hieraus folgt der
Satz 25. Bei einer (i)-regularen Bewegung B( t ) entspricht dem Kriimmungs- mittelpunkt Ysi der Cangpolbuhn pi bei der quadratischen Verwandtschaft (5.1) der Kriimmungsrnittelpunkt Ypi der Rastpolbahn pi.
(9 1
224 Tolke, Ebene projektive Kinematik
Bemerkung. 1st also die quadratische Verwandtschaft auf einer der im vorigen Abschnitt angegebenen Arten bestimmt, so kann der eine Kriimmungsmittelpunkt konstruiert werden, sobald der andere bekannt ist (Satze 23 und 25) .
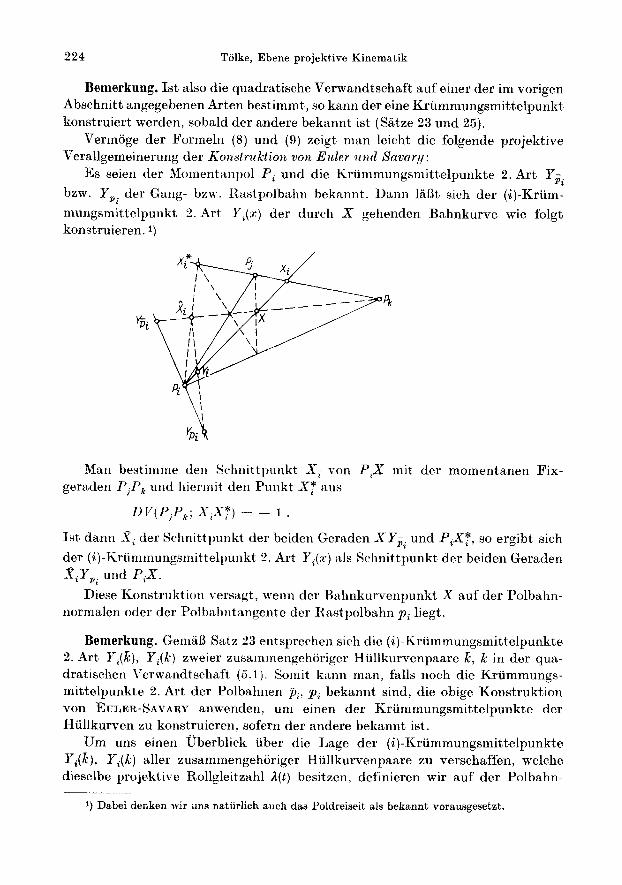
Vermoge der Fornieln (8) und (9) zeigt man leicht die folgende projektive Verallgemeinerung der Konstntktio?L von Eider iind Savary :
Es seien der Moinentanpol P, und die Eiriiriimungsmittelpuiikte 2 . Art Y G ~ bzw. Ypi der Gang- bzw. li:~stpolbahii bekannt. Dann lafit sich der (i)-Krum- niungsmittelpunkt 2 . Art Y&(x) der durch X gehenden Bnhnkurve wie folgt konstruieren. 1)
Man bestimme den Schnittpunkt X i von P i x mit der momentanen Fix- geraden P,P, und hiermit den Punkt XT itus
D V ( P j P , X i q ) = - 1 .
1st dann Lqi der Schnittpunkt der beiden Geraden X Y i i und Pix:, so ergibt sich der (i)-Kriimmungsmittelpunkt 2. Art Yi(x) als Schnittpunkt der beiden Geraden 'TiYpi uiid Pix'.
Diese Konstrukt ion versagt , wenn der Bahnkurvenpunkt X auf der Polbahn- normalen oder der Polbahntangente der Rnstpolbalin pi liegt.
Bemerkung. GemaiB Satz 23 entsprechen sich die (i)-Kriimmuiigsmittelpunkte 2. Art Y,(k) , Y J k ) zweier zusaminengelioriger Hullkurvenpaare k, k in der qua- dratischen Verwandtschaft (5.1). Somit kann man, falls noch die Kriimmuiigs- mittelpunkte 2. Art der Polbahnen pi, pi bekannt sind, die obige Konstruktion von EULER-SAVARY anwenden, um einen der Kriimmungsmittelpunkte der Hiillkurven zu konstruieren, sofern der andere bekaniit ist,.
Um uns einen nberblick uber die Lage der (i)-Kriimmungsmittelpunkte Y,(L), Yi(k) aller zusammengehoriger Hiillkurvenpaare zu verschaffen, welche dieselbe projektive Rollgleitzahl A ( t ) besitzen, definieren wir auf der Polbahn-
1) Dabei denken wir uns natiirlich auch das Poldreiseit als bekannt vorausgesetzt.

Tolke, Ebene projektive Kinematik 225
normalen von pi durch DV(PiQi; YpiYpi) = 2
den nur von 2 abhangigen Punkt Qi. Werden namlich die (i)-Krummungsmittel- punkte Y,(&), Y,(k) von k, k gesucht, die sich an der Stelle t in X im Eingriff befinden, so findet man wegen der Unabhiingigkeit des Punktes Qi von x' zu- nlchst X,(y) als Schnittpunkt von QiX mit Pix:. Durch Projektion von Y;i und Ypi aus r?,(y) ergeben sich dann die gesuchten (i)-Kriimmungsmittelpunkte 2 . Art Y,(S) und Yi(k).
Wir wollen nun aueh die Definition des (i)-Krummungsmittelpunktes 1. Art einer Bahnkurve auf beliebige Kurven verallgemeinern! Dazu sei wieder k eine in der Gangebene befestigte Kurve, die ihre Hullbahn k im Punkte X beruhrt. IVir geben dann die folgende
Definition. Bei einer projektiven Bewegung heifit der durch die Momentan- pole P,, Pj geheiide Kegelschnit't s i (k ) bzw. s i (k ) , der die Kurve k bzw. k in X oskuliert, der (i)-Schmiegkegelschnitt von k bzw. k (1 + i + j =# I). Der beziiglich si(l%) bzw. d ( k ) gebildete Pol der momentanen Fixgeraden P,P, heifit der (i)- Kriimrnungsmittelpunkt 1. Art der Kurve k bzw. der Hiillbahn I ; im Eingriffs- punkt X .
Fur den (i)-Schmiegkegelschnitt von k bzw. k berechnet man sich unmittelbar
(10)
(11)
si(k) : 2[zkz] [xp,*] [xpj2] zi - [xki] [xp,z] [xp7z] xi = 0
si(L): 2[8XX] [.CP,k] [.Fj@] xi - [&$] [%p,x] [zpja] $ = 0 . bzw .
Bemerkung. Wie es sein mu13, stimmt der Kegelsclinitt si(k) mit' dem (i)- Xchmiegkegelschnitt @(€, x) uberein, wenn die zugrunde liegende Kurve k auf einen Punkt X degeneriert, die Hullbahn also die Bahnkurve durch X ist.
Zu einer allgemeinen Kurve & gibt es im allgemeinen drei Schmiegkegel- schnitte. Fiillt dagegen X stets mit einem Momentanpol zusammen, X = Pi, 15 Math. Nachr. Bd. 68

226 Tolke, Ebene projektive Kinematik
so haben wir jeweils nur einen Schmiegkegelschnit,t, den wir den Schmiegkegei- schnitt der Polbuhn p i bzw. pi nennen.
Liegt der Punkt X auf der nioinentanen Fixgeraden
x i = o ,
so entfallt der (j)-Schmiegkegelschnitt. Wir betraohten in diesem Fall nur die beiden anderen Schmiegkegelschnitte.
Wir kehren zu den allgemeinen Betrachtungen zuriick und legen von deg Polbahnen verschiedene zusammengehorige Hullkurvenpaare k, k zugrunde. Zuniichst ergibt sich die mit (1 1 ) gleichwertige Beziehung
(11')
Mdk)
(12 )
si(E): 2il[xiz] [xp&] [.pi*] zi - [xi& - fJo,xkp,] [xplz] [xpiz] xi = 0 . Hiermit gewinnen wir fur den (i)-Kriimmungsmittelpunkt 1. Art Mi(k) bzw.
.. . 3 m,(k) = - [x i x ] x'x + [xpi+ii][xpi+2i] {ef ( C T ~ + ~ - ai) xkpk 1-1
(2ui - O i i i - ai+z) ~ i + d +
bzw . (13) Formeln, die mod 3 zu verstehen sind und bei denen wir
mi(E) = m,(k) + ((1 - 1) [x&] + [ x i f ~ ( ~ ) x $ ~ ] ) xix ,
0 fur i = k e . =
{1 fur i * k gesetzt haben.
Die beiden (i)-Krummungsmittelpunkte 1. Art sind somit genau fur die speziell harmoniseh lj,(t)-Bewegungen auf dem Polstrahl Pix gelegen ( X = Ein- griffspunkt). Fur das Doppelverhaltnis
8;: = D V ( P , X ; M i ( k ) H , ( k ) ) dieser vier Punkte findet man (im Falle ihrer Kollinearitat) (14) D; = q t ) und somit den
Satz 26. Far die speziell harmonischen q,(t)-Bewegungen kann die projektim Rollgleitzuhl 1 auch noch als Doppelverhultnis der folgenden vier Punkte gedeutet werden: Xomentanpol Pi, Beriihrungspunkt X der beiden Hilllbahnen k, k , (i)- Xriimmungsmittelpunkt 1. Art M i ( k ) von k und (i)-Kriimmungsmittelpunkt 1. Art Mi (k ) von E i m gemeinsamen Bertihrungspunkt X .
Wir wollen auf die oben ausgeschlossenen Polbahnen p i bzw. pi zuruckkommen ! Ihre Krummungsmitte1pu.nkte 1. Art fMpi bzw. ergeben sich zu
2 2 7 3 3 2
1 1 7 3 3 1
mp, = (j:B': - f$j: - hi3) PI - 2 8 , 8 1 8 i P 2 + 2B,PiBiP3
mp, = 28284iPI - ( a x - B:$ - G3) P2 - 2PI2M2P3 mp, = - 283P383P1 + 2838383P2 + (BX - 823 - h 3 P3
(15) 1 1 2 2 2 1

Toke, Ebene projektive Kinematik 227
bzw . j r k j k (16) m,i = mpi + (- 1 ) BiBi(qj, - q k ) ) Pi 9
wobeij < E und j $. i + k gilt. Die Krummungsmittelpunkte 1 . Art der Polbahnen pi, p i besitzen also die -
fur konstruktive Zwecke wichtige - Eigenschaft, daB sie sich in der fruher untersuchten quadratischen Verwandtschaft (5.1 ) entsprechen.
Nun wissen wir bereits, daB die beiden Kriimmungstheorien 1. Art und 2. Art zum Parameterwert t iibereinstimmen, wenn dort eine speziell harmonische iji(t)- Bewegung vorliegt, bei der die Polbahnen p j und pk ( j =# i $. k =I= j) stationiir sind. 'Wie lautet die (eventuell schwiichere) Bedingung, daB die beiden Polbahn- kriimmungsmittelpunkte zusammenfallen ? Da naoh den Gleichungen (15) der Kriimmungsmittelpunkt Npi auf der Polbahnnormalen von pi liegt, entfallt hier die notwendige Voraussetzung einer speziell harmonischen Iji(t)-Bewegung. An- dererseits brauchen die Polbahnen pi und pk (j =t= i .$. k + j) auch nicht stationar zu sein, vielmehr entnimmt man (8) und (15) den folgenden
Satz 27. Das Verschwinden der Halbinvarianten hik kennxeichnet diejenigen projektiven Bewegungen, bei denen der Htillpunkt der Polbahnnormalen von pi der Pol der momentanen Fixgeraden Pipk beztiglich des Schmiegkegelschnitts si(pi) der Rastpolbahn p i ist .
$Vir haben hiermit eine befriedigende geometrische Deutung fur das Ver- schwinden der sechs Halbinvarianten hik und Hik gewonnen.
Bemerkung. H. R. MULLER hat im AnschluB an G. GRUSS entdeckt, daD die zunachst metrisch erkliirte Rollgleitzahl zweier Hullkurvenpaare mit dem Doppel- verhiiltnis von vier mjt diesem Paar ausgezeichnet verbundenen Punkten iiber- einstimmt. Dieser dort merkwurdige Sachverhalt gewinnt somit im Rahmen der projektiven Kinematik ejne befriedigende (Satz 24 und 25) geometrische Klarung.
8. Kreispunktkurve. BaLLsche Punkte
Wir kommen nun auf Pragen von dritter Differentiationsordnung zu sprechen ! Eine erste ist die nach jenen Bahnkurvenpunkten X , fur deren (i)-Kriimmungs- mittelpunkte 2 . Art Yi(x) an der Stelle t')
gilt. I n Analogie zur euklidischen Bezeichnungsweise, nennen wir solche Punkte X (i)-Scheitelpunkte ihrer Bahnkurven. Sie bilden bei der Bewegung p(t) zum Parameterwert t die projektive (verallgemeinerte) (i)-Kreispunktkwve Xi(t, x ) 2. Art. Vermoge (5.1), (3.6') und (3 .7) findet man hierfur
(1) [ijiPiX] = 0
( 2 ) XiV, 2) : = [lO(j,3+PjPiXI ("iPiX1 + 2[ljiPP(&PJ> - M i ~ i x I {2[0( j$~j l j ixI + [(+(j, + 4 j ) ) x$j + (qj) - qk,) B;xhPixl> = 0 *
2) Man beachte, dalj yi wegen (5.1) bereits von zweiter Differentiationsordnung ist. i5*

228 Tolke, Ebene projektive Kinematik
Die geonietrische Bedeutung der (i)-Kreispunktkurve druckt sich dabei in der Halbinvarianz von ( 2 ) gegenuber Umnormungen (1.2) bzw. Parametertransfor- mationen (1 .S) uus
c X i ( f , Z) = Xiit, 2) bxw. ;X;(t, X ) = q-s ( t ) * Xi([: 5 ) . Der Gleicliung ( 2 ) entiiimint man weiter, daB die BurveXi(t, Z) eine (rationale)
Kurve dritter Ordiiung init dein Doppelpunkt Pi ist. Die Doppelpunktstangenten sind dabei die jeweilige Polbahntangent,e und die Gerade
(3) mit k < j und X: += i += j. Diese Darstellung enthalt eine weitere geometrische Kennzeichnung der speziell liarmonischen Bewegung, niimlich : Die Doppel- punktstangente Zi fallt genau fur die speziell harrnonischen 't),(t)-Bewegungen mit der Polbahnnormalen von p i zusa:iinien.
Wahrend im Euklidischeii die Kreispunktkurve bekanntlicli nuch durch die anderen beiden Momentanpole (= Kreispunkte) geht (daher die von L. BUR- MESTER vorgeschlagene Bezeiclniung), herrschen hier andere VerhLltnisse. Es gilt der
Satz 28. Bei einer (i)-regrclaren Bewegrcng gehf die (i)-Kreispunktkurve an der Stelle t genau dnnn rcuch dtsrch die andereiz beiden Momentanpole, wenn diese Pol- bahnen stntionas si nd oder die Verbindzcngsgerade mit Pi als Polbahntangente besifzen.
Zum Beweis sei ohne Beschrankung der A411geineiriheit i = 1. 'Wegen (2) ist die Bedingung, daB X , ( t? X ) nuch durch die Pole P? bzw. P, geht, gleichbedeutend mit
li: = (2qj) - o(k) - O i ) - p p - a(i) - Oi) = 0
,3$! = 0 bzw. pi$% = 0 .
Da auch uingekehrt aus $; = $': = 0 folgt, di~D .X,(t, x) durch P2, P, geht, ist schoii alles bewiesen.
Bei der zugehorigen iiiversen Bewegung p ( t ) liabeii wir ebenfdls drei (i)- Kreispunktkurwn -Ki(t, R') 2. .4rt. Mit' (2) und ctem Ersetzungsprinzip (3.12) findet man liierfiir
-
- (4) Kl(t, 2 ) : = [qj)dppix] ([$ipiR'] - [;ir,yi0(j)2Jpj] + Oi[p jp ,x ] )
- [pipi,.] ('3[ocj)2fp;pi@e4 + [~ . ( j , "3p j + (o(j) - C q k ) ) p:x'p,p,a:]) = 0
und somit den
Sa,tz 29. Die von d e n (i)-Krummt~ngsrnittelpunkten 2 . Art der (i)-Kreispunkt- kurve Xi(t, x) an der Stelle I eiizer Bewegung P(t) gebildete Kurve isf die X Z L dieser StelEe gehorige (i)-Kreispunktkurve xi(t, x) der zagehorigen inversen Bewegung o( t ) .
Bemerkung. Damit lBBt sich die (i)-Kreispunktkurve der inversen Bewegung mit den im Abdin i t t 6 ausgefiihrten Nethoden konstruieren, sofern die (if- Kreispunktkurve der urspriinglichen Bewegung bekannt ist.

Tolke, Ebene projektive Kinematik 229
Vermoge der (i)-Kreispunktkurve lafit sich nun eine Kennzeichnung der affinen Bewegungen mit variablem (reellem) Polpaar auf der uneigentlichen Geradeii beweisen ! Dazu betrachten wir die Einhullende des (i)- Wendekegel- schnittes
(5) Di(t , x ) : = [5PiX] - x‘i’[ljipix] = 0 . Man findet fur die Ableitung von ( 5 )
+ [(‘(j) + ‘?j)) ’%j + (‘(j) - O(k)) p;’%kpt21 - x(i){[jipiX] + 2[ljtp,‘,’$i]} = 0 .
Nennen wir die neben den Momentanpolen vorhandenen Schnittpunkte von (5) und (6) die (i)-Bullschen Punkte der Bewegung B(t) zum betrachteten Parameter- wert, so konnen wir sagen : Die Einhullende des (i)-Wendekegelschnittes besteht im allgemeinen aus der Rastpolbahn pi und den Kurven, welche die drei (i)- BAmsehen Punkte wahrend der Bewegung P( t ) beschreiben.
Zwei Fragen drangen sich unmittelbar auf! 1) Wann liegen die (i)-BAmschen Punkte (wie z. B. in der euklidisehen Kine-
matik) auf der (i)-Kreispunktkurve Xi(t, x ) ? Berucksichtigen wir in ( 2 ) die Gleichungen (5) und (6), so folgt
~ ( 4 x) = { [ l j i ~ ~ x l + ~ ~ P ~ P P ( ~ , X % ~ I + ~ Q ~ A P , X I } %.w, X )
und damit der Satz 30. Die uffinen Bewegungen mit variublem (reellem) Momentanpolpaar
Pj , Pk uuf der (uneigentlichen) Fixgeruden xi = 0 sind unter den Bewegungen P(t ) dadurch churakterisiert, clap die (i)-BALLschen Punkte der Bewegung stets auf der zugehorigen (i)-Kreispunktkurve 2. Art X i ( t , x ) liegen.
2) Wann ist die Gleichung (6) fur alle Momentanpole erfullt ? I n diesem Falle gibt es wie im Euklidischen nur einen BALLschen Punkt ! Man findet als Bedinguiig hierfiir sofort (i + j < k =+ i) ( 7 ) und
Fur affine Bewegungen gemal3 Satz 30 liegen damit die drei Momentanpole stets genau dann auf (6), wenn die Momentanpole Pi, P, sogar einzeln fest sind.
Sollen die Momentanpole Pi, P, fur regulare Bewegungen P ( t ) auf (6) liegen, so mu13 die Invariante f i notwendig verschwinden.
(oi - ac,,)(@ + @;!),9$) = 0 ( o ( ~ ) - 0,) pi - /?t)p:i, = 0 .
9. Spezielle projektive Bewegungen
I n der ebenen euklidischen Kinematik nehmen die Trochoidenbewegungen aus Grunden der Geschichte und ihrer Anwendungsmoglichkeiten eine bevorzugte Stellung ein. Sie lassen sich dadurch verallgemeinern, daB man Bewegungen

2 30 Tolke, Ebene projektive Kinematik
betrachtet , deren zentrisch ahnliche Polbahnkrummungskreise stets einen kon- stanten &inlichkeitsmodul m f 1 besitzen.
Diese in [ 141 genauer untersuchten Bewegungen nennen wir X(M)-Bewegungs- vorgange. Die Trochoidenbewegungen erscheinen so gewissermafien als ,,Ersatz- bewegungen" in Annaherung von dritter Differentiationsordnung. Die S(")- Bewegungsvorgiinge verallgemeinern daruber hinaus noch die - in der Technik eine wichtige Rolle spielenden - symmetrischen Rollungen. Letztere ergeben sich fur m = - 1.
Wir wollen nun untersuchen, inwieweit sich diese Uberlegungen auch in der projektiven Kinematik durchfiihren lassen ! Dazu erinnern wir zunachst an den im 7 . Abschnitt erkliirten Schmiegkegelschnitt si(pi) bzw. si(jji) der Rast- bzw. Gangpolbahn. Ausfuhrlich ergibt sich dafur mit dem Kroneckersymbol
dzkl. = 1 fur i f l i i j i i 4 0 sonst
die Darstellung
mit a(i)jk: = S i j k ( f i . Bk. - 182. pi. - h?) - 2 * E * B!B!j$? ( 2 ) L) ( e ) E ) (0 a ) i i a
6 ( i ) j k : = a ( i ) j k + d2jk(u(k) - a(j)) B(i)Bti) f wobei j + 1 =F li, 1 + R =+= i ist und E den Fehlstand von (s, I) bedeutet. Wir geben dann die folgende
Definition. Eine (i)-regulire Bewegung heiBt eine Gim)-Bewegung, wenn der Polbahnschmiegkegelschnitt der Gangpolbahn p i aus dem der Rastpolbahn pi durch die feste Homologie (m = konst.)
(3) pya = m Y , ey3 = x 3 fiir j =i= i
mit m =+ 1 hervorgeht. IVir wollen die daraus resultierenden Einschrankungen fur die Polbahnen
pi, pi angeben. Zunachst liegt wegen (l), (2) und (3) genau dann eine G;lm)-Bewe- gung vor, wenn die Relation (i =t= j < li f i)
m
1 - nb A i : = ,@: - @,$ a & - h!k = - ~ ( q j ) - q k ) ) Bib;, m + 1 (4)
niit m = konst. erfiillt ist. Fiihrt man noch durch
12, : = i K P 2 - B h ( 5 ) 122: = - pip1 + Pip3
n3: = i%Pi -%P2

Tolke, Ebene projektive Kinematik 231
die Normalpunkte N i der Polbahnnormalen ni ein, so liegt genau dann eine Gim)-Bewegung vor, wenn fur die Polbahnen pi bzw. j j i mit einer Konstanten m das BGL-System3) (i =+ j < k =j= i)
bzw.
gilt. Dabei ist F~ = ~ ~ ( t ) eine ,,willkurliche" Funktion des Parameters, wahrend sich Fi = s,(t) gemaiS
( 7 ) 2 (Ei - gi) = 2ai - oj - 0, (i + j < k $; i ) bestimmt, und somit genau fur Oi(t)-Bewegungen mit E~ iibereinstimmt.
Bemerkung. Naturlich 1aBt sich die GroBe m in (4) auch als ein Doppel- verhaltnis deuten, namlich
(8) DV(PiNi ;M; iMp, ) = m .
Bemerkung. Die zu den beiden Grenzfiillen rn = 0 bzw. m = 00 gehorigen Gio)-Bewegungen bzw. GibW)-Bewegungen sind somit die (i)-regularen Bewegungen, bei denen jeweils die Rastpolbahn pi bzw. die Gangpolbahn jji eine Gerade ist.
Um auch uber die zugehorige Gangpolbahn pi bzw.Rastpolbahn pi eine geometrische Vorstellung zu vermitteln, formulieren wir den unmittelbar aus (5.8), (7.15) und (4) folgenden
Satz 31. Die k$')-Bewegungen 6zw. G(i-)-Bewegungen sind unter den (i)-regul6ren Bewegungen dadurch charakterisiert, dab der (i)-Kriimmungsmittelpunkt M G ~ von pi bzw. Mpi von pi stets auf dem (6)-Wende- bzw. (i)-Riickkehrkegelschnitt liegt.
Damit fiillt also der (i)-Kriimmungsmittelpunkt MSi bzw. HPi genau dann mit dem (i)-Wende- bzw. (i)-Ruckkehrpol zusammen, wenn die G.!,")- bzw. Gim)- Bewegung eine Qi(t)-Bewegung ist.
3) Wegen der (i)-Regularitiit der Bewegung sind die Punkte pi, &, ni linear unabhsngig.
232 Tolke, Ebene projektive Kinemat,ik
Bedenkt man die Gleichungen (1) und (5.8), so folgt weiter der
Satz 32. Bei einer G~m)-Bewegung geht der (i)- Wendekegelschnitt @(t , x ) aus dem Schmiegkegelschni ft si( p i ) der Gangpolbahn pi durch die feste Homologie
hervor. TJm wei tere differentialgeometrische Eigenschaften der Gim)-Bewegungen
aufzudecken, wollen wir zuniichst fur regulare Bewegungen die Rastpolbahnen p i genauer studieren !
Nach dem fruher Gezeigten konnen wir dabei A , + 0 voraussetzen. Fur die TAYLoR-Entwicklung an der Stelle t = 0 gilt (wir unterdriicken den Index t = 0)
t’ t x
p * x i = 2 ( 1 - m ) y i , e - p = y k fiir k + i
pi( t ) = pi + tBi~pi + < (jf +P$PB:)pj + {pi+ CB’P;)’ d
(9)
l k i + j:f% + BiBlPkI Pi + * * * . Hiermit bestinimen sich die Buschel der die Polbahiien qi hyperoskulierenden Kegelschnitte Qi niit dem Buschelparameter pi und den Abkiirzungen (4, links) der Reihe nach zu
3 .
3 Q,: [@,pix] (- 2A1x’p$?: + -~ A,p;s’ - dp’ ( 1 2 1 + B X )
$ 2 : [$2p22] (- 2/42zy?:p: + - A2&9 - d,d (6: + pip;)
&: [@,p,x] (- 2LI3x3p;/?; + -A 3p;21 - 113x1 (6; + &3;)
i ~,Pu1[@1Pl”l) - ~ l W h P , 1 X l = 0 7
2
3 (10)
+ A2/-42[$21)2Xl) - ~ 2 x ~ P ; b , P , 4 = 0 >
2 . 3
+ A3P3[$31)351) - d 3 ~ ‘ @ ~ [ @ 3 P 3 X ] = 0 . Den im Buschel Qi enthaltenen hyperoskulierenden Kegelschnitt, der die momen- tane Fjxgerade
xa = 0
beruhrt, nennen wir die Schniiegparabel Gpi der Rastpolbahii p i . Mit (10) findet man hierfur die Darstellung4)
(11) Gpi: = (3AiGipix] - d,[$si~])2 + (- l)(i) 184; x‘~’[@s,x] = 0 . Vermoge der Schmiegparabel liJ3t sich nun den Yolbahnen p i in kinematisch-
geometrischer Weise eindeutig eine weitere einparametrige Geradenschar ai ZU-
ordnen, niimlich die Verbindungsgerade ai des Momentanpols Pi mit dem Beriihr- punkt der Schmiegparabel G9i mit der momentanen Fixgeraden xi = 0. Wir nennen die Gerade a j die Projektivnorrnale der R,astpolbahn p i . Die Projektiv-
4) Die Schmiegparabel Gpi existiert somit und ist eindeutig bestimmt.

Tolke, Ebene projektive Kinematik 233
normale ai stimmt dabei wegen (11) genau fur
mit der zum Parameter t gehorigen Relativnormalen der Polbahn p i iiberein. Gebrauchen wir entsprechende Bezeichnungen fur die Gangpolbahnen, so
entsteht die Frage : Wann fallen die beiden Projektivnormalen zusammen- gehoriger Polbahnen zusammen ?
Fur die Projektivnormale der Gangpolbahn i j i gilt gemaB (11) und dem Er- setzungsprinzip (3.12)
4, = 0
(12) 3 ~ ~ - j j g , p ] - p pi pi^] = o .
@j?k Ji =
Beachtet man hierin die Relationen (i + j < k + i )
und {O i - (qj) - qk)) B:Ba>
i k pipi> g j @ k * = ( @ i ) 2 (20i - oi - uk) {Oi - (a(j) - + ( e p {Aa - (qj) - q k ) ) (BfBf)' - (+j) - a@)) 8 8 1 7
so folgt fur die Projektivnormale der Gangpolbahn pi (i + j < k + i) 3 ( A i - (qj) - qh)) B$f) ([ j iPiXI + (- 1Pmi - qj)) Pixk
- (ai - G ( ~ ) ) ~ 3 ~ ~ 1 ) - rljip,xi ( 2 0 ~ - oj - ok) (4 - (o( j ) - a(,)) BE) (12')
[PiPiXl (4 - b(j) - q k ) ) (B:Bf)' - ( q j ) - q k ) ) B P ! ) = 0 . Den Gleichungen (1 l), (12') entnimmt man, da13 die beiden Projektivnormalen genau dann zusammenfallen, wenn
gilt, wobei i =+ j < k + i und m gemiil3 (8) zu verstehen ist. Ob ihrer geornetrischen Bedeutung ist diese Bedingung natiirlich halb-
invariant (gegenuber Parametertransformationen z. B. vom Gewicht vier), eine Eigenschaft, die man natiirlich auch sofort rechnerisch verifiziert.
In naheliegender Verallgemeinerung lii13t sich der nicht auf der Schmieg- parabel GPigelegene Schnittpunkt F, ihrer durch diePole Pi bzw. Pk (i + j $. k ?= i) gehenden Tangenten als der Projektivbrennpunkt der Schmiegparabel CZpi be- zeichnen. Mit (1 1) findet man hierfur
fi: = 2&161 * pi + 313&/3:4, ps - 34&B:6, * 213
(14) f 2 : = - 3A2B:Bh * + 2&g2 - ~2 + 3A&P% ~3
f 3 : = 343j3JPid3 pi - 3133&3~63. pa + 2d363 * p 3 ,
wobei zur Abkurzung
(15) &: == 34, ( / j f + Z + p$;+z) - ,.,:+2
&: = - 34, ( ) ;+I + j3#+') + 6,pi" - jeweils mod 3 - gesetzt wurde.

234 Tolke, Ebene projektive Kinematik
Diesen Formeln entnehmen wir, daB die Projekt'ivnormale der Rastpolbahn p i genau dann durch den Projektivbrennpunkt der Schmiegparabel Gpi geht, wenn
2 ' . 3
(i + j < k i i )
(16) z,: = d i (g;k + (p$ f ) ' ) - - nip:pq = 0
gilt. Nennen wir E$")-Bewegungen mit xi = 0 speziell harmonische G!"'-Bewe-
gungen, so liefert (16) im Vergleich mit (13) den Satz 33. Bei d e n speziell harmonischen S~")-Bewegzinqen fallen die beiden
Projektivnormalen der Polbahnen p i , p i genau dann zzLsamm'en, wenn der Projektiv- brennpmkt der Schm iegparabel Gpi aii f der Projektivnormalen der Rastpolbahn p i l iegt .
Bekanntlich schlieBt im Euklidischen bei der symmetrischen RoZZu,ng - das sind S'- ')-Bewegungen - die Affinnormale der Gangpolbahn und die Affinnormale der Rastpolbahn mit der Polbahntangente jeweils den selben .\Vinkel ein. W e steht es hier?
Sind m j r l , miT2 die momentanen Fixgeraden durch P,, ti die Polbahn- tangente und ai bzw. 6, die Projektivnormale der Polbahn p i bzw. pi, so mussen wir also priifen, wann
( 1 7 ) D V ( m i + , m i T 2 ; riai) = DV(mi+,m,+,; l i t i ) gilt. Beachtet inan (4)? (11) und ( S 2 ' ) , so folgt, daB diese Gleichung mit
aquivalent 1st. Hieraus lassen sich zwei Folgerungen zrehen, die auch die im Euklidischen
bekannten Tatsachen wesentlich erganzen ! Zunachst sind bei den (i)-regularen projektiven Bewegungen mit zusamnienfallenden Projektivnormalen at und ti, diese genau dann init der Polbahnnormalen der Rastpolbahn pt identisch, wenn fur das Doppelverhkltnis aus (8) (18) 2 . m = m . y " L
gilt. Insbesondere folgt 5 0 der Satz 34. Liegi eine speziell harmonische (i)-regulure @,(t)-Bewegung rnit zti-
summenfallenden Projektivnormalen a, iind 6, vor, so sind diese genau dann mit der Polbahnnormalen der Rastpolbahn p , identisch, wenn es sich .urn e ine (speziell har- moniscke) E:m)- Bewegting handelf.
Nit Satz 33 ergibt sich aus (S7 ' ) weiter der
Satz 35. Cnter den speziell harmonischen G:")-Betuegtingen, bei denen d ie beiden Projektivnormalen der Yolbahnen p , 7ind &?if zitsummenfallen, sind die Gi- I)- Bewegmgen dadwch charakterisiert, da/3 die beiden Doppelverhaltnisse aus (17 ) iibereinstimmen.

Tolke, Ebene projektive Kinematik 235
Um eine erste Kennzeichnung der G$")-Bewegungen zu beweisen, nennen wir den aus dem (i)-Ruckkehrkegelschnitt (5.13) durch die feste Homologie
hervorgehenden Kegelschnitt
1 1 - m 2 m
%&, y) : = [$pig] - - __- y'i"-,ipiy] = 0 (19)
den (i)-Ruckkehrkegelschnitt (m)-ter Art. Vermoge der Gleichungen (14) folgt dann der
Satz 36. Die G;.*)-Bewegungen (m =+ 0) sind unter den (i)-regularen projektiven Bewegungen B( t ) dadurch charakterisiert, dap der Projektivbrennpunkt der Schmieg- parabel der Rastpolbahn pi stets auf dem (i)-Riickkehrkegelschnitt (m)-ter Art liegt.
Wir wollen insbesondere auf den sich fur m = - 1 ergebenden Spezialfall hinweisen, namlich das
Korollar. Die @ ')-Bewegungen sind dadurch charakterisiert, dafi der Pro- jektivbrennpunkt der Schmiegparabel der Rastpolbahn pi stets auf dem (i)- Ruckkehrkegelschnitt liegt .
I n der ebenen euklidischen Kinematik geht bei den symmetrischen Rollungen die Affinnormale der Gangpolbahn stets durch den Brennpunkt der Schmieg- parabel der Rastpolbahn. .Wie steht es hier? Wegen (12') und (14) ist der Pro- jektivbrennpunkt Fi genau dann mit der Projektivnormalen der Gangpolbahn pi inzident, wenn (i + j < k $: i)
1 2
-~ A ; (Ai - (Oi - Ok) &p:) p$3q . xi - of@$?; (Ai - [(Oi - rs k )/99"]') i z
1 + 34, (Ai - (Of - Ok) /@;> ni - - (Oi - Oh) pp;) (g ih + (pjpf)') ( 2
- di (Ai - (Oi - Ok) Bfp;)q/9; = 0
gilt. Da dies mit (17') aquivalent ist, folgt der
Satz 37. Bei e,iner ti)-regularen projektiven Bewegung (mit Ai, di =+ 0) geht die Projektivnormale der Gandpolbahn pi genau dann durch d e n Yrojektivbrenn- punkt der Schmiegparabel der Rastpolbahn pi, wenn die beiden Doppelverhalt- nisse aus (17) ubereiizstirnmen.
Bemerkung. Dieser bemerkenswerte Zusammenhang scheint such im Eukli- dischen bisher unbekannt geblieben zu sein !
I n Verbindung mit dem obigen Korollar folgt so zum Beispiel, da13 fur speziell harmonische G:- ')-Bewegungen der Projektivbrennpunkt der Schmiegparabel der Rastpolbahn p i stets von der Projektivnormalen der Gangpolbahn pi aus dem (i)-Riickkehrkegelschnitt ausgeschnitten wird.

236 Tiilke, Ebene projektive Kinematik
Wjr wollen nun eine Kennzeirhnung der E.(,"')-Bewegungen unter den Bewe- guiigen der pseudoeuklidischen Ahnlichkeitsgeometrie beweisen !
Hierzu nennen wir - in Verallgemeinerung vom 8. Absclinitt - die zum Yarameterwert t gehorigen Puiikte der Einhullendeii des (i)-Ruckkehrkegel- schnittes (m)-ter Art die voii den Xomentanpoleii versthiedeii sind, die (i)-BaZl- schen Punkte (m)-ter Art der Bewegung f l ( t ) . Neben (19) ist fur diese Punkte demnach noch die Gleiohung
erfiillt. Es gilt demnach der
Satz 38. Unter den affinen Bewcgtmgew ?nit festem (reellem) Polpaar Pi, P, auf der (uneigentlichen) Geraden xi = 0 und mit einer nicht zerfallendm, Schmieg- parabel Gpi der Rnstpolbnhn p i - wobei Gpi durch keinen weiteren Momentanpol gehen moge ~ sind die G:m)- Bewegungen dadtcrch charakterisiert, daJ dcr Projektivbre,anpunkt von Gpi stets der (i)-Ballsche Punkt (m)-ter Art ist.
Zuni Beweis sei ohne Beschraiikung der &4llgemeinheit i = 1. Vermoge der Abkurzungen (4) sieht man, dal3 der Projektivbreiinpunkt f, = (xt, x2,6)' genau dann auf der Kurve (20) Iiegt, wenn
gilt. Nach Voraussetzung haben wir hierin
einzutragen. Da die Schniiegparabel Gpj nicht zerfallen und diirch keinen weiteren Momentanpol geheri sollte, gilt, weiter dl =+ 0 bzw. al =t= 0 und 6 , + 0, d. 11. der Projektivbrennyunkt F , liegt genau d a m auf (20), wenn m = konst. gilt. Hieraus folgt mit Satz 36 die Behauptung.
Bemerkung. Hiermit ist die von R. BEREIS in [ 2 ] fur die symmetrische Rollung angegebene Konstruktion des B ~ m s c h e n Punktes fur diese kennzeichnend. Dariiber hinaus gilt sie auch in der k'hnlichkeitskinematik.
AbschlieWend wollen wir noch auf diejenigen ( j ) - uiid (k)-regularen Bewe- gutigen hinweiscn, bei denen ( j += k )
(11) D r ( P j X i ; MPjJ1 ) = DV(P,N,; A11&x2>k): = m(t) =I= 1 p i
gilt. Wir sprechen von ~i(m)-Bewegu?zgelz. Gilt zudem noch xi = 0 (j $. i =i= k ) , so sageii wir, da13 eine speziell harmonische EJm)-Bewegung vorliegt.
Tolke, Ebene projektive Kinematik 237
Diese Gi(rn)-Bewegungen stehen in enger Beziehung zu den 5Di-Bewegungen. Hierunter versteht man nach W. DEGEN solche ( j ) - und (I%)-regularen Bewegungen, bei denen die Rastpolbahnen pjund pk stiindig einen sie jeweils in den Monientan- polen oskulierenden Kegelschnitt besitzen.
Die Bi-Bewegungen sind analytisch somit durch die Beziehurig
t22)
gekennzeichnet . Es stellt sich hier zuntichst die Frage, ob und wmn die zugehorige inverse
Bewegung ebenfalls wieder eine Si-Bewegung ist ! Es gilt hieriiber : Die inverse Bewegung einer 5Di-Bewegung ist genau dann selbst wieder eine Bi-Bewegung, wenn die Halbinvariante (vom Gewicht drei)
Bi: = di+l(p;+2)3 + (- l ) i di+2(/3;+I):l = 0
(23) Djk: = - (- ((~j - ok) Ggk (i =+ j < k + i) verschwindet,.
Man sieht hier wieder einnial die Bedeutung der ini zweiten Abschnitt er- klarten , ,speziellen Halbinvarianten" fur Kriimmungsfragen !
Satz 39. Unter d e n (j)- und (k)-regularen Bewegungen sind die %i-Beweg.zcngen d u r c h die Kopu,nktalitat der Verbindzcngsgeraden Pipk, IPlpj&lpk, NiNk gekenn- zeichnet .
Dieser unmittelbar aus (5) und (7.15) folgende Satz ist insoferii bemerkens- wert, als durch ihn das DEGENsche Oskulationsproblem gewissermal3en auf das Studium der beiden entsprechenden Polbahnschmiegkegelschnitte zuriickgefiihrt wird. Ferner deutet sich durch ihn der Zusammenhang mit den Gi(m)-Bewegungen an. Es gilt niimlich : Jede %{-Bewegung, deren inverse Bewegung wieder eine Bi- Bewegung ist, ist eine Gi(m)-Bewegung.
Umgekehrt ist natiirlich fiir G<(m)-Bewegung das Verschwindeii von Di mit dem von Djk gleichbedeutend. Insbesondere folgt hiermit der
Satz 40. Bei einer speziell hnrmonischen e i ( rn) -Bewegung besitzen die Pol- bnhnen pj , p k ( i =+ j $. k + i ) genau dann einen sie jeweils in den Polen oskdie- renden Kegelschnitt, wenn die Halbinvariante G& verschwindet.
Gesarnthochschule Xiegen, Yathernatik, BRD - 593 ffuttental- Weidenau Holderlinstr. 3