earthquake rupture modeling with pylith: dynamic scec...
TRANSCRIPT
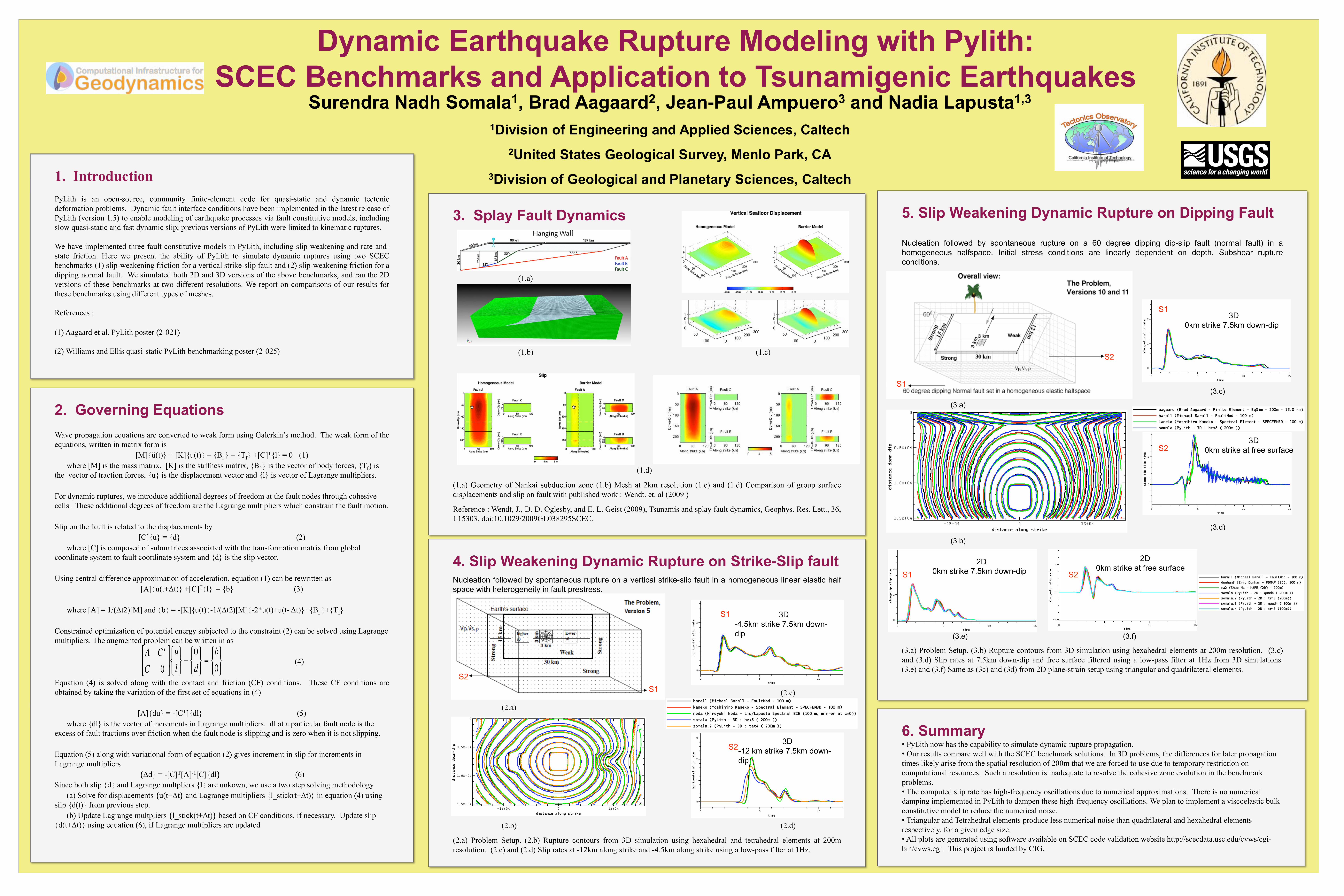
1. Introduction
PyLith is an open-source, community finite-element code for quasi-static and dynamic tectonic
deformation problems. Dynamic fault interface conditions have been implemented in the latest release of
PyLith (version 1.5) to enable modeling of earthquake processes via fault constitutive models, including
slow quasi-static and fast dynamic slip; previous versions of PyLith were limited to kinematic ruptures.
We have implemented three fault constitutive models in PyLith, including slip-weakening and rate-and-
state friction. Here we present the ability of PyLith to simulate dynamic ruptures using two SCEC
benchmarks (1) slip-weakening friction for a vertical strike-slip fault and (2) slip-weakening friction for a
dipping normal fault. We simulated both 2D and 3D versions of the above benchmarks, and ran the 2D
versions of these benchmarks at two different resolutions. We report on comparisons of our results for
these benchmarks using different types of meshes.
References :
(1) Aagaard et al. PyLith poster (2-021)
(2) Williams and Ellis quasi-static PyLith benchmarking poster (2-025)
2. Governing Equations
Wave propagation equations are converted to weak form using Galerkin’s method. The weak form of the
equations, written in matrix form is
[M]{ü(t)} + [K]{u(t)} – {Bf } – {Tf} +[C]T{l} = 0 (1)
where [M] is the mass matrix, [K] is the stiffness matrix, {Bf } is the vector of body forces, {Tf} is
the vector of traction forces, {u} is the displacement vector and {l} is vector of Lagrange multipliers.
For dynamic ruptures, we introduce additional degrees of freedom at the fault nodes through cohesive
cells. These additional degrees of freedom are the Lagrange multipliers which constrain the fault motion.
Slip on the fault is related to the displacements by
[C]{u} = {d} (2)
where [C] is composed of submatrices associated with the transformation matrix from global
coordinate system to fault coordinate system and {d} is the slip vector.
Using central difference approximation of acceleration, equation (1) can be rewritten as
[A]{u(t+ t)} +[C]T{l} = {b} (3)
where [A] = 1/( t2)[M] and {b} = -[K]{u(t)}-1/( t2)[M]{-2*u(t)+u(t- t)}+{Bf }+{Tf}
Constrained optimization of potential energy subjected to the constraint (2) can be solved using Lagrange
multipliers. The augmented problem can be written in as
(4)
Equation (4) is solved along with the contact and friction (CF) conditions. These CF conditions are
obtained by taking the variation of the first set of equations in (4)
[A]{du} = -[CT]{dl} (5)
where {dl} is the vector of increments in Lagrange multipliers. dl at a particular fault node is the
excess of fault tractions over friction when the fault node is slipping and is zero when it is not slipping.
Equation (5) along with variational form of equation (2) gives increment in slip for increments in
Lagrange multipliers
{ d} = -[C]T[A]-1[C]{dl} (6)
Since both slip {d} and Lagrange multpliers {l} are unkown, we use a two step solving methodology
(a) Solve for displacements {u(t+ t} and Lagrange multipliers {l_stick(t+ t)} in equation (4) using
silp {d(t)} from previous step.
(b) Update Lagrange multpliers {l_stick(t+ t)} based on CF conditions, if necessary. Update slip
{d(t+ t)} using equation (6), if Lagrange multipliers are updated
Surendra Nadh Somala1, Brad Aagaard2, Jean-Paul Ampuero3 and Nadia Lapusta1,3
1Division of Engineering and Applied Sciences, Caltech
2United States Geological Survey, Menlo Park, CA
3Division of Geological and Planetary Sciences, Caltech
Dynamic Earthquake Rupture Modeling with Pylith:
SCEC Benchmarks and Application to Tsunamigenic Earthquakes
3. Splay Fault Dynamics
(1.a)
(1.b) (1.c)
(1.d)
(1.a) Geometry of Nankai subduction zone (1.b) Mesh at 2km resolution (1.c) and (1.d) Comparison of group surface
displacements and slip on fault with published work : Wendt. et. al (2009 )
Reference : Wendt, J., D. D. Oglesby, and E. L. Geist (2009), Tsunamis and splay fault dynamics, Geophys. Res. Lett., 36,
L15303, doi:10.1029/2009GL038295SCEC.
4. Slip Weakening Dynamic Rupture on Strike-Slip fault Nucleation followed by spontaneous rupture on a vertical strike-slip fault in a homogeneous linear elastic half
space with heterogeneity in fault prestress.
(1.c) (2.c)
(2.a)
(2.b) (2.d)
(2.a) Problem Setup. (2.b) Rupture contours from 3D simulation using hexahedral and tetrahedral elements at 200m
resolution. (2.c) and (2.d) Slip rates at -12km along strike and -4.5km along strike using a low-pass filter at 1Hz.
5. Slip Weakening Dynamic Rupture on Dipping Fault
Nucleation followed by spontaneous rupture on a 60 degree dipping dip-slip fault (normal fault) in a
homogeneous halfspace. Initial stress conditions are linearly dependent on depth. Subshear rupture
conditions.
(3.c)
(3.a)
(3.d)
(3.b)
(3.e) (3.f)
(3.a) Problem Setup. (3.b) Rupture contours from 3D simulation using hexahedral elements at 200m resolution. (3.c)
and (3.d) Slip rates at 7.5km down-dip and free surface filtered using a low-pass filter at 1Hz from 3D simulations.
(3.e) and (3.f) Same as (3c) and (3d) from 2D plane-strain setup using triangular and quadrilateral elements.
6. Summary • PyLith now has the capability to simulate dynamic rupture propagation.
• Our results compare well with the SCEC benchmark solutions. In 3D problems, the differences for later propagation
times likely arise from the spatial resolution of 200m that we are forced to use due to temporary restriction on
computational resources. Such a resolution is inadequate to resolve the cohesive zone evolution in the benchmark
problems.
• The computed slip rate has high-frequency oscillations due to numerical approximations. There is no numerical
damping implemented in PyLith to dampen these high-frequency oscillations. We plan to implement a viscoelastic bulk
constitutive model to reduce the numerical noise.
• Triangular and Tetrahedral elements produce less numerical noise than quadrilateral and hexahedral elements
respectively, for a given edge size.
• All plots are generated using software available on SCEC code validation website http://scecdata.usc.edu/cvws/cgi-
bin/cvws.cgi. This project is funded by CIG.
2D
0km strike 7.5km down-dip
2D
0km strike at free surface
3D
0km strike at free surface
3D
0km strike 7.5km down-dip
3D
-4.5km strike 7.5km down-
dip
3D
-12 km strike 7.5km down-
dip
A CT
C 0
u
l
0
d
=
b
0
S2
S1
S1
S2
S1
S2
S2
S2
S1
S1