dynamic location estimation by kalman filter
TRANSCRIPT

DYNAMIC LOCATION ESTIMATION BY KALMAN FILTER
Lubna FarhiUBICC Publishers, Sir syed Engineering University, Karachi, Pakistan
ABSTRACTThis paper describes an effective method for dynamic location estimation by Kalman Filter for range-based wireless network. The problem of locating a mobile terminal has received significant attention in the field of wireless communications. In this paper, Kalman Filter with TDOA technique describes the ranging measurement tracking approach. Kalman filter is used for smoothing range data and mitigating the NLOS errors. The paper presents a simple recursive model by using time difference of arrival based location measurement and incorporating state equality constraints in the Kalman filter. From the process of Kalman filtering, the standard deviation of the observed range data can be calculated and then used in NLOS/LOS hypothesis testing. The proposed recursive locating algorithm, compared with a Kalman tracking algorithm that estimates the target track directly from the TDOA measurements, will be comparatively more robust to measurement errors because it updates the technique that feeds the location corrections back to the Kalman Filter. It compensates for the measured geometrical location and decreases random error influence to the location precision. Simulation results show that the proposed location estimation algorithm can improve the accuracysignificantly.
Keywords: Kalman filter, ranging, TDOA,CWLS.
1 INTRODUCTION
The time-based methods for locating mobile stations in wireless systems usually involve the usage of location parameters, such as time of arrival (TOA) and time difference of arrival (TDOA). In general, the true range between a transmitter and a receiver in the wireless environment can be correctly calculated only when the direct path of signal propagation is present, which may not always be possible. Among the error sources which may affect the accuracy of wireless location, non-line-of-sight (NLOS) error is considered the major one. Particularly where higher accuracy is required, the effects caused by NLOS error usually cannot be ignored [1].
In this article, we concentrate on the ranging aspect of the dynamic location estimation. In the TOA method, the distance between the Mobile Station (MS) and Base Station (BS) is determined from the measured one-way propagation time of the signal traveling between them. For two-dimensional (2D) positioning, this provides a circle centered at the BS on which the MS lies. By using at least three BSs to resolve ambiguities arising from multiple crossings of the lines of position, the MS location estimate is determined by the intersection of the circles. In the TDOA method, the differences in the arrival times of the MS signal at multiple pairs of BSs are measured.
TDOA-based location systems are of more interest because of its potential for high location estimation accuracy. We will mainly discuss location algorithm including fundamental performance in the presence of noise and multi path. Further more we will describe the combination of optimization strategies which will improve the overall accuracy [4].
Accurate location is one of the essential features that assist third generation (3G) wireless systems in gaining a wide acceptance and triggering a large number of innovative applications. Although the main driver of location services is the requirement of locating Emergency 911 callers within a specified accuracy, mobile position information will also be useful in designing intelligent transportation systems. Global Positioning System (GPS) could be used to provide mobile locations. However, it would be expensive to be adopted in the mobile phone network because additional hardware is required in the MS. Alternatively, utilizing the base stations in the existing network for mobile location is preferable and is more cost effective for the consumer. The basic principle of this software based solution is to use two or more BSs to intercept the MS signal. Each TDOA measurement defines a hyperbolic locus on which the MS must lie and the position estimate is given by the intersection of two or more hyperbola. In general, the MS location is estimated from a set of nonlinear equations constructed
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1309 www.ubicc.org

from TDOA measurement.In [5], a method of location and velocity
estimation with signal strength and TOA measurements was suggested. By using a linear recursive model of mobility and by smoothing the location via Kalman filter, an accurate estimated track could be achieved. A Kalman tracking method based on TDOA measurements for UMTS mobile location has been demonstrated in [6]. Using a different way of converting nonlinear equations to linear equations without introducing constrains, have developed a simple LS AOA-based location algorithm [7]. However, all these methods ignore the constrains on the movement of mobile users. The goal of this work is vehicle position optimization by using NLOS error identification and mitigation by using biased Kalman filter, as shown in Fig.1.
Figure 1: Dynamic Location Architecture.
The rest of the paper is organized as follows. Section 2 describes the measurement models.Section 3 presents location estimation model and Section 4 describe location measurement model NLOS identification, the Kalman filter techniques for smoothing, tracking and NLOS mitigation techniques are presented in Section 5. Section 6 demonstrates the simulation results. Conclusions are summarized in section 7.
2 MEASUREMENT MODELS
This section describes the TOA and TDOA
measurements. Let Tyxx ],[= be the MS location to
be determined. The coordinates of the i th BS is
Miyxx Tiii ,1,2,=,],[= ,where the superscript
T denotes the transpose operation and M is the total number of the receiving BSs. The distance between the
MS and the BS, denoted by id , is given by
Miwhere
yyxxd iii
.....1,2=
)()(= 22
(1)
The TOA is the one-way propagation time taken for the signal to travel from the MS to a BS. In the absence of disturbance, the TOA measured at the BS,
denoted by it , is
Mic
dt ii ,1,2,== (2)
where c is the speed of light. The range
measurement based on it in the presence of
disturbance, denoted by iTOAr , is modeled as
iTOAiiTOA ndr ,, =
iTOAii nyyxx ,22 )()(=
(3)
Mi ,1,2,=
where iTOAn , is the range error in iTOAr , . Eq. (3)
can also be expressed in a vector form as
,)(= TOATOATOA nxfr
(4)
where (5)
(6)and
(7)
2.1 TDOA measurement algorithm
The TDOA algorithms are based on measuring the difference in the time of reception of signals at different BSs, without requiring a synchronization of all the participating BSs and MT. Actually, the uncertainty between the reference time of the BSs and that of the MT can be removed by means of a differential calculation. Therefore, only the BSs involved in the location estimation process must be tightly synchronized. For a couple of BSs, let say i and j, the TDOA, , is given by , where
and are the absolute times taken by the burst to reach the BSs i and j, respectively. Assuming that the MT is in LOS with both the BSs,i and j, it follows that the MT must lie on a hyperbola. A second hyperbola on which the MT must lie can be obtained using a further TDOA measurement involving a third BS. The user position can therefore be identified as the interception point of the two hyperbolae, as shown in Fig.2. The solution of the relevant equation system can be found with an iterative method and least squares minimization.
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1310 www.ubicc.org

Figure 2: TDOA method.
Assigning the first BS as the reference, it can be easily deduced that the range measurements based on the TDOAs are of the form:
(8)
where is the range error in . Notice that if the TDOA measurements are directly obtained from the TOA data, then
In vector form, Eq. (8) becomes
(9)
where
(10)
(11)
(12)
3 LOCATION ESTIMATION
In general, the MS location is not determined geometrically but is estimated from a set of nonlinear equations constructed from the TOA, RSS, TDOA, or AOA measurements, with the knowledge of the BS geometry. Generally optimization approaches for location are Nonlinear Least Square (NLS), Maximum Likelihood (ML), Gaussian ML (GML), Genetic Algorithm Method (GAM ) and Constrained Least
Square method (CWLS) [3]. Basically, there are two approaches for solving the nonlinear equations. The NLS approach is to solve them directly in a nonlinear least squares or constrained weighted least squares framework. Although optimum estimation performance can be attained, it requires sufficiently precise initial estimates for global convergence because the corresponding cost functions are multi-modal. The CWLS approach is to reorganize the nonlinear equations into a set of linear equations. In this paper, the CWLS approach is adopted and we will focus on a unified development of accurate position algorithms for TDOA measurement. For TDOA-based position systems, it is well known that for noise conditions, the corresponding nonlinear equations can be reorganized into a set of linear equations by introducing an intermediate variable, which is a function of the source position. This technique, is commonly called spherical interpolation (SI) [8]. However, the SI estimator solves the linear equations via standard least squares (LS) without using the known relation between the intermediate variable and the position coordinate. To improve the location accuracy of the SI approach, Chan and Ho have proposed [4] to use a two-stage CWLS to solve the source location, while [3] incorporates the relation explicity by minimizing a constrained LS function based on the technique of Lagrange multipliers. According to [3], these two modified algorithms are referred to as the quadratic correction least squares (QCLS) and linear correction least squares (LCLS), respectively. The QCLS estimator and LCLS yields an unbiased solution with small standard deviation that is close to moderate noise level. But when noise ispractically strong, its bias is considerable and its variance could no longer approach the stability criteria. We have improved the performance of the QCLS estimator and LCLS estimator by introducing a weighting matrix in the optimization, which can be regarded as a hybrid version of the QCLS and LCLS algorithms. We observe in simulation that the performance of the CWLS estimator is superior to that of the LCLS and QCLS by reduction in the MSREs, for the whole range of noise power. Therefore, considering the constraints, we can eliminate spurious position estimates and improve the accuracy of estimation.
In this work, we developed a unified approach for mobile location by utilizing TDOA measurement and improving the ranging accuracy with the use of CWLS [7].
The CWLS location estimation approach for the TDOA measurement is: without disturbance, Eq. (8) becomes
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1311 www.ubicc.org

It can be rewritten as
(13)
Squaring both sides of Eq. (13) and introducing an intermediate variable , which has the form
(14)
We obtain the following set of linear equation
(15)
Writing Eq. (15) in matrix form gives
(16)
where
(17)
(18)
and the variable , consists of the MS location as well as [8].
In the presence of measurement errors, the SI technique determines the MS location by simply solving Eq. (16) via standard LS and the location estimate is found from
(19)
where
is an optimization variable vector [6].An improvement to the SI estimator is the linear correction least squares (LCLS) method, which solves the LS cost function in Eq. (19) subject to the constraint of or equivalently,
(20)
where
. Optimum estimate of the location is computed by minimizing the following CWLS cost function:
(21)
where is the covariance matrix of TDOA's measure values, which is a function of the estimate of
, denoted by [6].
The idea of CWLS estimator is to combine the key principles in the CWLS and LCLS methods, the MS location estimate is determined by minimizing Eq. (21) subject to Eq. (20). For sufficiently small measurement errors, the inverse of the optimum covariance matrix
for the CWLS algorithm is found using the best linear unbiased estimator [2] as
(22)
where
(23)
And, denotes element-by-elements multiplication. Since contains the unknown , we express
and approximate by . Similar to [6], the CWLS problem is solved by using the technique of Lagrange multipliers and the Lagrangian to be minimized is
(24)
where is the lagrange multiplier to be determined. The estimate of is obtained by differentiating Eq. (18) with respect to and then equating the results to zero [3] as
The solution is:
(25)where is real value. Put the in Eq. (25) and obtain the sub-estimates of . Then choose the solution from those sub-estimates which makes the cost function minimum.
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1312 www.ubicc.org

4 LOCATION MEASUREMENT MODEL AND NLOS IDENTIFICATION
The range measurement between a mobile station and the m th base station corresponding to TOA data can be modeled as:
)()()(=)( imimimim tNLOStntLtr
(26)
where )( im tr is the measured range at the sampling
time )(, imi tLt is the true range, )( im tn is the
measurement noise and can be modeled as a zero-mean additive Gaussian random variable with variance
m ; )( im tNLOS is the NLOS error component in
the received signal. There is no NLOS error if the line-of-sight exists, in which case, the measurement error
)( im tn becomes the only source of range
measurement error. To mitigate the NLOS errors, the existence of non-zero NLOS component needs to be identified. To identify the change of channel situation between NLOS and LOS, the standard deviation of the
estimated range data )( im tr can be calculate as
2
1=
))(ˆ)((1
=ˆ imim
k
im tLtr
N
(27)
where )(ˆim tL is the estimated range data of the mth
BS at time instant it smoothed by the unbiased
Kalman filter. The standard deviation estimated in Eq. (21) can then be used in the simple hypothesis testing to determine the LOS/NLOS BSs
conditionLOSH mmo <ˆ: (28)
conditionNLOSH mm ˆ:1 (29)
where is a scaling factor, and 1> is chosen
experimentally for the UWB channels.
5 KALMAN FILTER
The Kalman filter is a set of mathematical equations that implement a predictor-corrector type estimator that is optimal in the sense that it minimizes the estimated error covariance. The Kalman filter has been the subject of extensive research and application, particularly in the area of autonomous or assisted navigation. This is likely due in large part to advances in digital computing that made the use of the filter practical, but also to the relative simplicity and robust nature of the filter itself. Rarely do the conditions
necessary for optimality actually exist, and yet the filter apparently works well for many applications in spite of this situation.
Filtering is desirable in many applications. For example, radio communication signals are corrupted with noise. A good filtering algorithm can remove noise from electromagnetic signals while retaining the useful information. Kalman filter is a tool that can estimate the variables of a wide range of processes and estimates the states of a linear system. It is the one that minimizes the variance of the estimation error.
Kalman filtering provides a tool for obtaining that reliable estimate. It estimates a process by using a form of feedback control: the filter estimates the process state at some time and then obtains feedback in the form of (noisy) measurements. As such, the equations for the Kalman filter fall into two groups: time update equations and measurement update equations. The time update equations are responsible for projecting forward (in time) the current state and error covariance estimates to obtain the a priori estimates for the next time step. The measurement update equations are responsible for the feedback for incorporating a new measurement into the a priori estimate to obtain an improved a posteriori estimate. The time update equations can also be thought of as predictor equations, while the measurement update equations can be thought of as corrector equations. Indeed the final estimation algorithm resembles that of a predictor-corrector algorithm.
A Kalman filter is recursive so that new measurements can be processed as they arrive. It is essentially a set of mathematical equations that implement a predictor-corrector type estimator that is optimal in the sense that it minimizes the estimated error covariance. A Kalman filter can be used in estimating the state vector of a mobile target from the observed range data and therefore estimating the true range value. The state vector can be represented in [1]
,= )()()()(1)( kkkkk WBXAX (30)
where )(kX )]()([= kLkL mm is the state
vector of the mobile related to the m th sensor. The
)(kW is the driving noise vector with covariance
matrix Q Iw2= , and
(31)
The measurement process is
(32)
where is the measured data and
(33)
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1313 www.ubicc.org
and is the measurement noise with covariance.
The operation of the Kalman filter can be summarized as follows:
• Kalman filter time update equations:
(34)
(35)
• Kalman filter measurement update equations
(36)
(37)
(38)
where is the Kalman gain vector and is the covariance matrix of .
The modified biased Kalman filter is proposed to process the range measurement according to the feedback identification result from the previous processed data. Before computing kalman gain, the measurement noise covariance or the range prediction covariance is adjusted as follows:
Case 1: if
(39)
(40)
Case 2: if
(41)
(42)
6 SIMULATION RESULTS
Simulation is performed for position estimation by using MATLAB. It is assumed that 200 data samples are measured with the sampling period 3s. The vehicles have a velocity of 4m/s. The range data are created by the true distance from each vehicle position in the trajectory to the known three BSs. The measurement noise is assumed to be AWGN and NLOS noise is added to the true calculated range to get the measured range data. The measurement noise is assumed to be Gaussian distributed with zero mean and a standard deviation . The initial value for the state vector is .
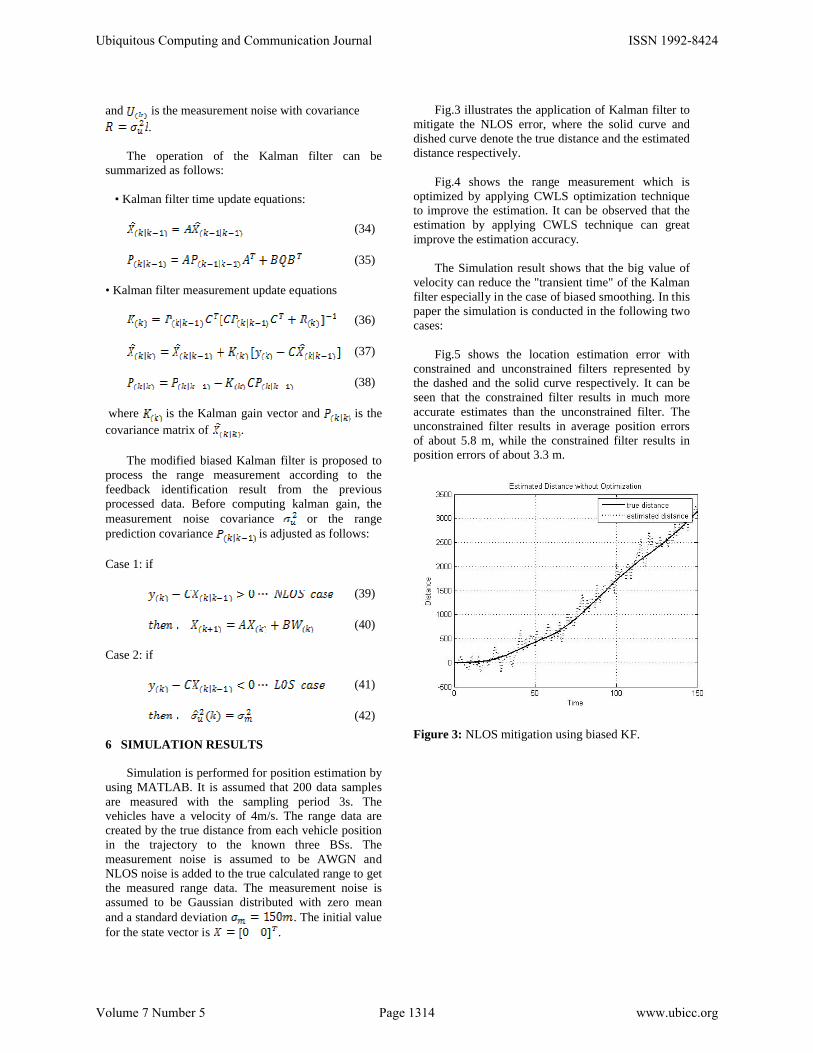
Fig.3 illustrates the application of Kalman filter to mitigate the NLOS error, where the solid curve and dished curve denote the true distance and the estimated distance respectively.
Fig.4 shows the range measurement which is optimized by applying CWLS optimization technique to improve the estimation. It can be observed that the estimation by applying CWLS technique can great improve the estimation accuracy.
The Simulation result shows that the big value of velocity can reduce the "transient time" of the Kalman filter especially in the case of biased smoothing. In this paper the simulation is conducted in the following two cases:
Fig.5 shows the location estimation error with constrained and unconstrained filters represented by the dashed and the solid curve respectively. It can be seen that the constrained filter results in much more accurate estimates than the unconstrained filter. The unconstrained filter results in average position errors of about 5.8 m, while the constrained filter results in position errors of about 3.3 m.
Figure 3: NLOS mitigation using biased KF.
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1314 www.ubicc.org

Figure 4: NLOS mitigation with CWLS optimization.
Figure 5: Position estimation error with the constrained and unconstrained filters.
7 CONCLUSION
The techniques and algorithm in this paper has been developed to be used for dynamic location estimation. GPS often use to localize objects; however, the accuracy of the GPS receiver’s location estimate is not reliable when the satellite signal is completely lost or distorted by trees, high buildings, or tunnels. The absence of satellite signals has been studied in much of the research and a Kalman Filter has been employed in order to integrate the GPS measurements with other measurements and to overcome the outage of the satellite signals. However, the distortion of the satellite signal still causes misleading information for the location.
In this paper, we present a range estimation algorithm with NLOS error mitigation using biased Kalman filter. Simulation results demonstrate the
effectiveness of this method. If the state constraints are nonlinear they can be linearized. The proposed method gives a real-time constrained least squares estimation algorithm for estimating the location using TDOA measurements. The NLOS errors can be mitigated effectively for achieving higher accuracy in range estimation and wireless location.
8 REFERENCES
[1] B. L. Le, K. Ahmed, and H. Tsuji, "Mobile location estimator with NLOS mitigation using kalman filtering," In Proc.IEEE Wireless Communication and Networking, vol. 3, pp. 16–20, 2003.
[2] H. C. So and S. P. Hui, "Constrained location algorithm using TDOA measurements," IEICE Transactions on Fundamentals of Electronics, Communications and Computer Sciences, vol. E86-A, no. 12, pp. 3291–3293, 2003.
[3] G. W. Elko, Y. Huang, J. Benesty, and R. M. Mersereati, "Realtime passive source localization: a practical linear-correction least-squares approach," IEEE Transactions on Speech and Audio Processing, vol. 9, no. 8, pp. 943–956, 2001.
[4] Y. T. Chan and K. C. Ho, "A simple and efficient estimator for hyperbolic location," IEEE Transactions on Signal Processing, vol. 35, no. 8, pp. 1905–1915, 1994.
[5] M. Hellebrandt and R. Mathar, "Location tracking of mobiles in cellular radio networks," IEEE Transactions on Vehicle Technology, vol. 48, pp. 1558–1562, 1999.
[6] M. Najar and J. Vidal, "Kalman tracking based on tdoa for umts mobile," IEEE International Symp. Personal, indoor and Mobile Radio Communication, vol. 1, pp. 45–49, 2001.
[7] A. Pages-Zamora, J. Vidal, and D. R. Brooks, "Closed-form solution for positioning based on angle of arrival measurements," 13th IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, vol. 4, pp. 1522–1526, 2002.
[8] J. O. Smith and J. S. Abel, "Closed-form least-squares source location estimation from range-difference measurements," IEEE Transactions on Acoustics, Speech and Signal Processing, vol. 35, no. 12, pp. 1661–1669, 1987.
Ubiquitous Computing and Communication Journal ISSN 1992-8424
Volume 7 Number 5 Page 1315 www.ubicc.org