dy-20 & 30 manual rev 1.1
DESCRIPTION
elevator controller dy20-30 manual and instructionsTRANSCRIPT

DY30INSTRUCTION MANUAL
T h y s s e n k r u p p D o n g y a n g E l e v a t o r
C o n s t r u c t i o n D e p a r t m e n t
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 1 -
- CONTENTS -
1. Introduction -------------------------------------- P 3
2. Inspection of Entrance ------------------------------P 4
2. 1 Inspection of Mechanic and Software ----------------- P 4
2. 2 Inspection of BUTTON and LANTERN PCB ---------------- P 13
3. Inspection of CAR surrounding and COP -------------- P 18
3. 1 Inspection of CAR surroundings -----------------------P 18
3. 2 Inspection of COP --------------------------------P 19
3. 3 Inspection of DOOR C/P -------------------------------P 20
3. 4 Inspection of Load compensation device ---------------P 25
4. High speed test and high speed control ------------- P 27
4. 1 PDSET Test ---------------------------------------P 27
4. 2 control of comfortable riding ----------------------- P 28
5. HCU SERIAL communication MAP-------------------------P 42
5. 1 Confirmation of HAIL CALL ----------------------------P 42
5. 2 Confirmation of input signal ------------------------ P 45
6. Electric current control of DMCU --------------------P 54
6. 1 Zero point control of electric current -------------- P 54
6. 2 Control of Each valuable voltage resistance --------- P 54
6. 3 Settlement of revival voltage, Low voltage and Over voltage
-------------------------------------------------------------P 54
7. ON BOARD MONITORING -------------------------------- P 55
8. DISPLAY lists -------------------------------------- P 56
8. 1 MNCU DISPLAY list ------------------------------------P 56
8. 2 DMCU DISPLAY list ----------------------------------- P 60
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0)A4(210x297mm) Translated by Edward Kim

- 2 -
9. ERROR CODE Table--------------------------------- P 63
10. EEPROM DATA ------------------------------------ P 76
10. 1 MNCU EEPROM DATA --------------------------------P 76
10. 2 DMCU EEPROM DATA --------------------------------P 111
11. Communication MAP-------------------------------P 117
11. 1 SLS communication MAP----------------------------P 117
11. 2 VLS communication MAP----------------------------P 123
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0)A4(210x297mm) Translated by Edward Kim

- 3 -
DY-30 CONTROL MANUAL
1. Introduction
This manual consists of 5 parts of information necessary for adjustment and
maintenance of DY-30 system. It contains general basic information on the system, with
classification and description of the relevant materials.
2. Inspection of entrance
2.1 Inspection of mechanic and software
2.1-1 Cleaning of elevator and guide rail
(1) Cleaning of dust inside elevator.
(2) Cleaning of dust of guide rail and then oiling.
2.1-2 The way of control of CAR GUIDE SHOE.
Because Guide Shoe affects comfortableness of elevator in operation, it should
be installed and controlled accurately to do its best.
Usually, It is controlled the lower part and then higher part of Guide shoe.
Before controlling Guide shoe, it should be completed the balance.
(1) Casting feature of GUIDE SHOE
- Fixed feature - - Movable feature -
(Picture 1) (Picture 2)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0)A4(210x297mm) Translated by Edward Kim
same measure)

- 4 -
(Picture 3) (Picture 4)
1) Checking the oil inside Guide Shoe, if it is not enough put more oil
to the Guide shoe.
2) Insulting 3 or 4 pages of basic liner and check the Guide Shoe's
extra space 2mm ±0.5mm. if it is not matched, unfasten the fixed bolt
and then control it again.
3) While you are pushing the Car to the other side, check the urethane
guide shoe which correspond to the surface of rail. and when you release
the guide shoe it should be came back by itself to near rail.
4) When above items are completed, control the other side and higher
part as a same way.
5) Grinding should be done which such as abrasion or dent before
installation of Guide shoe
(2) Letterpress GUIDE SHOE
1) Before installation, control the gap of Guide Shoe like picture no ①④.
2) When you install the Guide Shoe, make the Guide shoe close adhesion to the
surface of Rail.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0)A4(210x297mm) Translated by Edward Kim
0.3 ∼ 0.6mm
1 ∼ 3mm
분할핀
유라이트
조정나사
로크넛트
취부볼트
상 프레임1.4 ∼ 1.8mm
1 ∼ 2mm
0.3 ∼ 0.6mm
3 ±1mm(좌.우 치수동일)
Pin
Adjusting Nut
Lock But
Installed Bolt
Upper frame
Same Measure
- 5 -
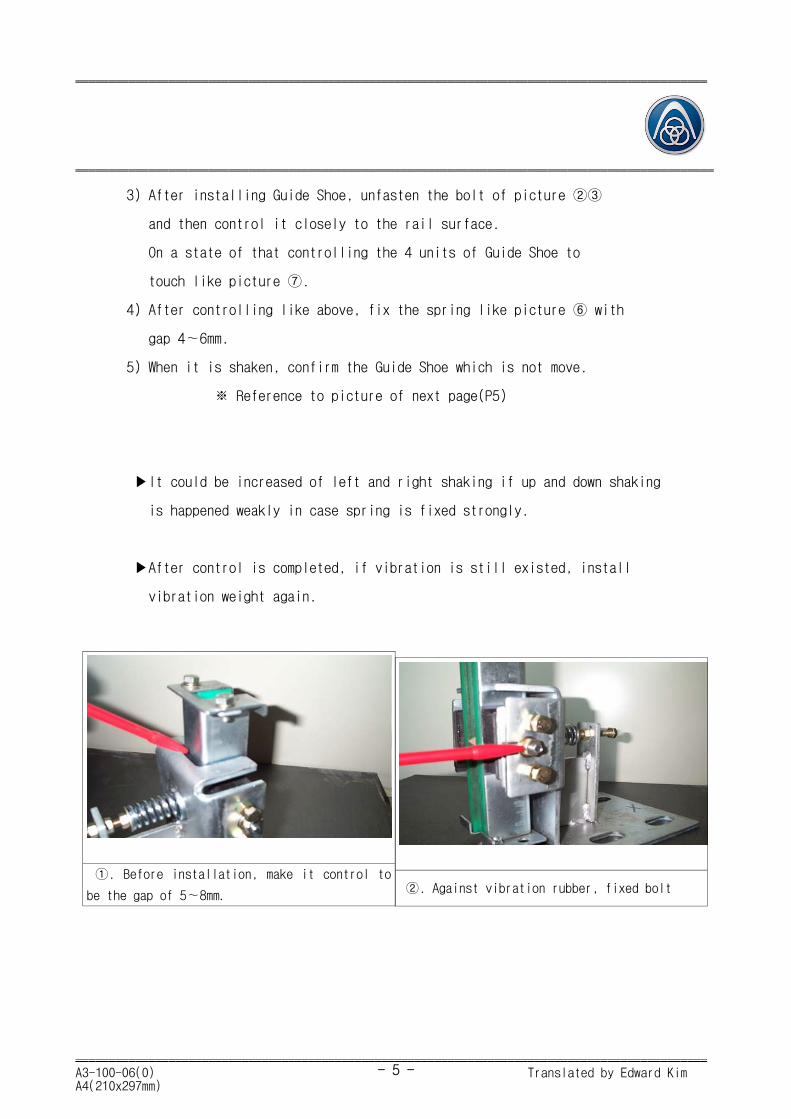
3) After installing Guide Shoe, unfasten the bolt of picture ②③
and then control it closely to the rail surface.
On a state of that controlling the 4 units of Guide Shoe to
touch like picture ⑦.
4) After controlling like above, fix the spring like picture ⑥ with
gap 4∼6mm.
5) When it is shaken, confirm the Guide Shoe which is not move.
※ Reference to picture of next page(P5)
▶It could be increased of left and right shaking if up and down shaking
is happened weakly in case spring is fixed strongly.
▶After control is completed, if vibration is still existed, install
vibration weight again.
①. Before installation, make it control to
be the gap of 5∼8mm②. Against vibration rubber, fixed bolt
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 6 -
③. Jockey Bolt④. Before installation, control it to be
the same gap.
⑤. Against vibration gap Liner ⑥. Spring fixed nuts
⑦. Spring ⑧. Finishing part should be squared
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 7 -
⑨. Finishing process of picture ⑧.
2.1-3 Control of INTER-LOCK
Because about 80% of the most breakdown and accident are happened in the entrance
of Elevator, Interlock device have to be controlled accurately.
These things influence to noise and speed under the operation.
(1) Case of DLL TYPE
(Picture 1) (Picture 2)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
②
①
②
① ③

- 8 -
1) To make 7-8 mm gap between Car sill and Roller, control it likes picture 2.
2) Using ruler make it same floor on the condition of Close. and the
height of picture ①,② would be each 3mm and 2mm.
3) Open the Door and then make it close to Stop bar like pictures ①, ②.
Taking a position of Belkrank roller and then make 9mm gap between rollers ③ and ④
4) As Door is closed like picture 4, controlling the ④ or ⑤ to be 2 ~ 3mm gap
using ④ or ⑤.
(Picture 3) (Picture 4)
5) As Door is closed, untying ①,② of picture 5, and then using ③ make 25mm
gap between ④ and ⑤. after then tying up ①,②.
※ Door S/W's tension should be enough. both sides have to work at the same time.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
①
③
②
④
②①
④⑤

- 9 -
(Picture 5)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
①
②
③
④
⑤

- 10 -
(2) DSL type case
Picture 2
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
④
③
②①
그림 1Picture 1
- 11 -
1) As Door is closed, using plate washer make 8mm gap between picture 1-③,④
and Car Sill.
2) As Door is closed, using ③ make adjust to picture 1-㉠.
3) As Door is closed, adjust the height about picture 1-⑦ to be 3mm.
4) As Door is closed, adjust the height about picture 1-⑧ to be 2mm.
5) As door is closed, using picture 1-⑥ make ⑨'s touching point of middle.
6) Picture 1-⑨'s touching point should be proper.
7) Open the door and then press it to the stop bar of picture 2-②,
make it 8 ~ 9mm gap between ③ and ④ of picture 2.
※ the gap of between ③ and ④ is same to thickness of knife.
8) As Door is closed, adjust picture 1-③ and ④ to have 24mm∼26mm gap
using picture 1-⑤.
※ ③ and ④'s gap could be 24mm ~ 26mm by thickness of knife.
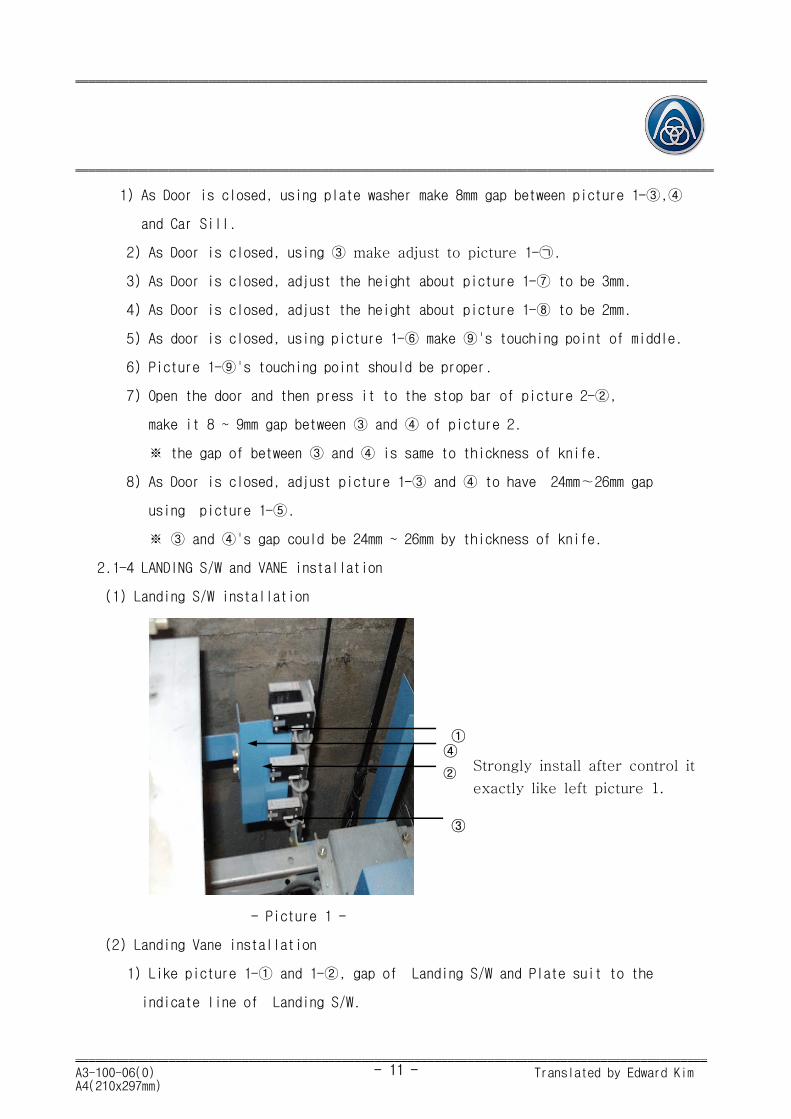
2.1-4 LANDING S/W and VANE installation
(1) Landing S/W installation
- Picture 1 -
(2) Landing Vane installation
1) Like picture 1-① and 1-②, gap of Landing S/W and Plate suit to the
indicate line of Landing S/W.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
①④
②
③
좌측 그림1과 같이 좌.우 수직을
정확히 조정후 견고히 취부 한다.
Strongly install after control it
exactly like left picture 1.

- 12 -
2) Picture 1-④'s height is installed at the same position of Hall, Car Sill
,Landing S/W and Vane.
2.1-5 install Adjustment of up and down of LIMIT S/W
(1) Distance and Gap
[Unit:mm]
1,2 LS
(a
point
of
contact
B)
3,4 LS
(a point
of
contact
B)
5,6 LS
(a point of
contact A)
1,2 SD
(a point
of contact
A)
3,4 SD
(a point
of contact
A)
5,6 SD
(a point
of
contact A
)
30m/min - 200 - 30 130(450) - - -
45m/min - 200 - 30 320(650) - - -
60m/min - 200 - 30 550(900) - - -
90m/min - 200 - 30 1000(1500) 1500(2200) - -
105m/mim - 200 - 30 1300(2200) 1500(2200) - -
120m/min - 200 - 30 1300(2200) 1500(2200) 2500(2800) -
150m/min - 200 - 30 1300(2200) 1500(2200) 2500(2800) 4000
- Table 1 -
Each gap of S/W is adjusted like table 1, and it should be enough to work a
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
②
①
③
2LS
4LS
6LS
5LS
3LS
1LS
- 13 -
point of contact like ①. and also have to be enough to work of 3,4 LS.
The distance should be same 1,3,5LS and 2,4,6LS on the rail.
Limit Cam should be installed vertically.
( ) part would be applied after MNCU IC12,13(V3.786H),DMCU U28,U30(V3.51).
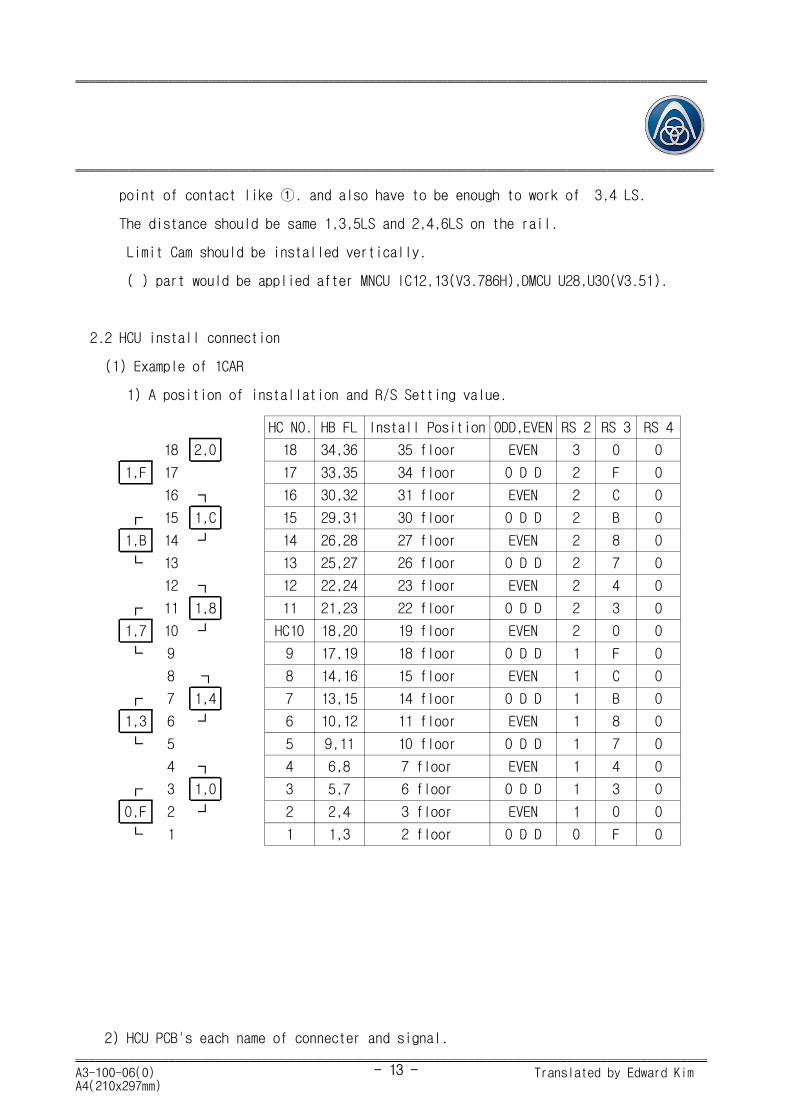
2.2 HCU install connection
(1) Example of 1CAR
1) A position of installation and R/S Setting value.
18 2,0
1,F 17
16 ┓
┏ 15 1,C
1,B 14 ┛
┗ 13
12 ┓
┏ 11 1,8
1,7 10 ┛
┗ 9
8 ┓
┏ 7 1,4
1,3 6 ┛
┗ 5
4 ┓
┏ 3 1,0
0,F 2 ┛
┗ 1
HC NO. HB FL Install Position ODD,EVEN RS 2 RS 3 RS 4
18 34,36 35 floor EVEN 3 0 0
17 33,35 34 floor O D D 2 F 0
16 30,32 31 floor EVEN 2 C 0
15 29,31 30 floor O D D 2 B 0
14 26,28 27 floor EVEN 2 8 0
13 25,27 26 floor O D D 2 7 0
12 22,24 23 floor EVEN 2 4 0
11 21,23 22 floor O D D 2 3 0
HC10 18,20 19 floor EVEN 2 0 0
9 17,19 18 floor O D D 1 F 0
8 14,16 15 floor EVEN 1 C 0
7 13,15 14 floor O D D 1 B 0
6 10,12 11 floor EVEN 1 8 0
5 9,11 10 floor O D D 1 7 0
4 6,8 7 floor EVEN 1 4 0
3 5,7 6 floor O D D 1 3 0
2 2,4 3 floor EVEN 1 0 0
1 1,3 2 floor O D D 0 F 0
2) HCU PCB's each name of connecter and signal.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 14 -
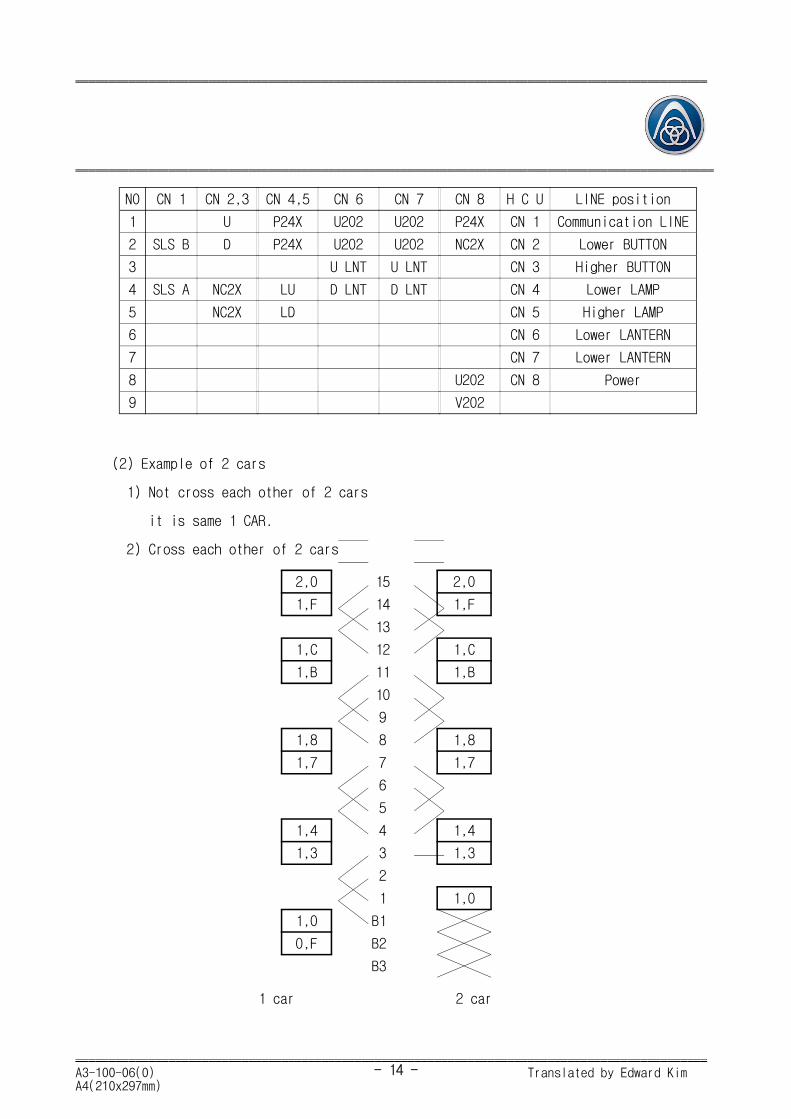
NO CN 1 CN 2,3 CN 4,5 CN 6 CN 7 CN 8 H C U LINE position
1 U P24X U202 U202 P24X CN 1 Communication LINE
2 SLS B D P24X U202 U202 NC2X CN 2 Lower BUTTON
3 U LNT U LNT CN 3 Higher BUTTON
4 SLS A NC2X LU D LNT D LNT CN 4 Lower LAMP
5 NC2X LD CN 5 Higher LAMP
6 CN 6 Lower LANTERN
7 CN 7 Lower LANTERN
8 U202 CN 8 Power
9 V202
(2) Example of 2 cars
1) Not cross each other of 2 cars
it is same 1 CAR.
2) Cross each other of 2 cars
2,0 15 2,0
1,F 14 1,F
13
1,C 12 1,C
1,B 11 1,B
10
9
1,8 8 1,8
1,7 7 1,7
6
5
1,4 4 1,4
1,3 3 1,3
2
1 1,0
1,0 B1
0,F B2
B3
1 car 2 car
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 15 -
3) One or two of two cars is for handicap, if it needs to install for handicap
it will be follows with button for handicap.
1,6,2 5 floor 1,6,2
1,5,2 4 floor 1,5,2
1,4,2 3 floor 1,4,2
1,3,2 2 floor 1,3,2
1,2,2 1 floor 1,2,2
1,1,2 B1 floor
1,0,2 B2 floor
0,F,2 B3 floor
(3) If MNCU 8A and LSIF-20 are using (HCU ⇒ LCU)
1) The way of 1Car, 2CAR, crossed 2Car are same as before. but only R/S Setting
value is different.
18 0,A,C
0,9,C 17
16 ┓
┏ 15 0,8,C
0,7,C 14 ┛
┗ 13
12 ┓
┏ 11 0,6,C
0,5,C 10 ┛
┗ 9
8 ┓
┏ 7 0,4,C
0,3,C 6 ┛
┗ 5
4 ┓
┏ 3 0,2,C
0,1,C 2 ┛
┗ 1
HC NO. HB FL Install Odd,Even RS 2 RS 3 RS 4
18 34,36 35 floor EVEN 1 2 C
17 33,35 34 floor O D D 1 1 C
16 30,32 31 floor EVEN 1 0 C
15 29,31 30 floor O D D 0 F C
14 26,28 27 floor EVEN 0 E C
13 25,27 26 floor O D D 0 D C
12 22,24 23 floor EVEN 0 C C
11 21,23 22 floor O D D 0 B C
HC10 18,20 19 floor EVEN 0 A C
9 17,19 18 floor O D D 0 9 C
8 14,16 15 floor EVEN 0 8 C
7 13,15 14 floor O D D 0 7 C
6 10,12 11 floor EVEN 0 6 C
5 9,11 10 floor O D D 0 5 C
4 6,8 7 floor EVEN 0 4 C
3 5,7 6 floor O D D 0 3 C
2 2,4 3 floor EVEN 0 2 C
1 1,3 2 floor O D D 0 1 C
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 16 -
2) Each connecter name of LCU34 PCB and signal (In case of no handicap button)
NO CN 1 CN 2 CN 3 CN 4 CN No LINE position
1 P24 D D CN 1 Power
2 NC2 SLS()B U U CN 2 Communication LINE
3 CN 3 Lower BUTTON and LAMP LINE
4 SLS()A LD LD CN 4 Higher BUTTON and LAMP LINE
5 LU LU
6 P24 P24
7
8
9 NC2 NC2
3) Each connecter name of LCU34 PCB and signal (In case of handicapped button)
NO CN 1 CN 2 CN 3 CN 4 CN No LINE position
1 P24 D HD CN 1 Power
2 NC2 SLS()B U HU CN 2 Communication LINE
3 CN 3 General BUTTON and LAMP LINE
4 SLS()A LD HLD CN 4For handicapped person
BUTTON and LAMP LINE
5 LU HLU
6 P24 P24
7
8
9 NC2 NC2
4) Each connecter name of LCU36 PCB and signal (In case of handicapped button)
NO CN 1 CN 2 CN 3 CN 4 CN5 CN6 CN No LINE position
1 P24 D HD D LNT CN 1 Power
2 NC2 SLS()B U HU CN 2 Communication LINE
3 U LNT CN 3 General BUTTON and LAMP LINE
4 R200 SLS()A LD HLD CN 4 Handicapped BUTTON and LAMP LINE
5 T200 LU HLU R200 CN 5 LANTERN power and output
6 P24 P24
7
8
9 NC2 NC2
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 17 -
5) Each connecter name of LCU36 PCB and signal (apply Lantern and Chime)
NO CN 1 CN 2 CN 3 CN 4 CN5 CN6 CN No LINE position
1 P24 D LNT D LNT CN 1 Power
2 NC2 SLS()B CN 2 Communication LINE
3 U LNT U LNT CN 3 Lower CHIME
4 SLS()A D CHM D CHM CN 4 Higher CHIME
5 U CHM U CHM R200 R200 CN 5 LANTERN power and output
6 P24 P24 LANTERN power and output
7
8
9 NC2 NC2
6) LSIF20 - 1A Connector
CN2 (SLS1) CN3 (SLS2) CN4 (SLS3) CN5 (SLS4)
1 - SLS1B 1 - SLS2B 1 - SLS3B 1 - SLS4B
2 2 - 2 2 -
3 3 - 3 3 -
4 - SLS1A 4 - SLS2A 4 - SLS3A 4 - SLS4A
5 5 - 5 5 -
CN6 (SLS5) CN7 (SLS6) CN6 (SLS7) CN7 (SLS8)
1 SLS5B 1 - SLS6B 1 SLS7B 1 - SLS8B
2 2 - 2 2 -
3 3 - 3 3 -
4 SLS5A 4 - SLS6A 4 SLS7A 4 - SLS8A
5 5 - 5 5 -
♣ TO1 : TODX 297, TO2 : TODX 297 , CN 10 : 1 ⇒ P5, 3 ⇒ COM
♣ CN12
A1 A2 A3 A4 A5 B1 B2 B3 B4 B5
TX-ENB1 RX-ENB1 COM TX-ENB2 RX-ENB2 COM
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 18 -
♣ Example of applying LSIF20-1A Connector
LOC CONNECTOR LINE NAME PURPOSE
CAR,SVP,
HALL
COMMUNICATI
ON
CN 2 SLS 1A/1B CCU 20
CN 3 SLS 2A/2B AUTO ANNOUNCER
CN 4 SLS 3A/3B SVP
CN 5 SLS 4A/4B HALL INDICATOR
HALL
COMMUNICATI
ON
CN 6 SLS 5A/5B ODD FLOOR HALL
CN 7 SLS 6A/6B HALL BUTTON
CN 8 SLS 7A/7B HALL LANTERN, CHIME
CN 9 SLS 8A/8B
NC 2 SLS 9A/9B EARTH CONNECTOR
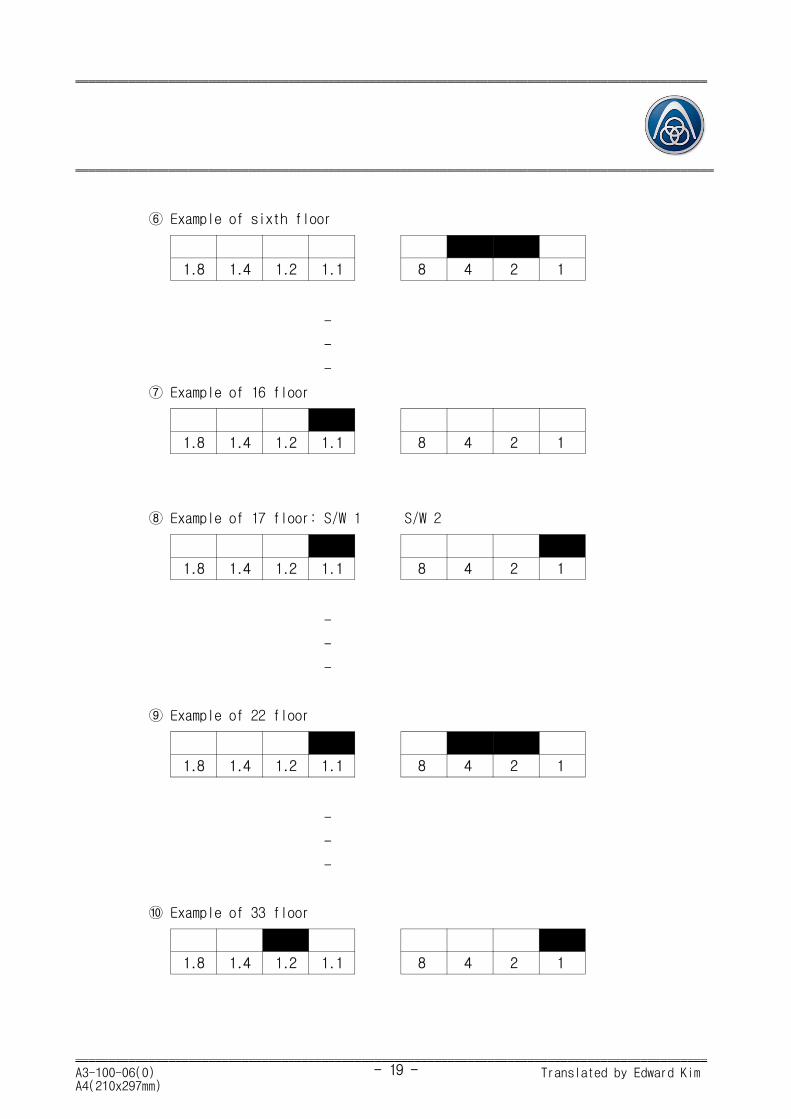
7) A new style DOT(LHIB,SHIB) SETTING. (From the front of PCB)
① Example of first floor: S/W 1 S/W 2
1.8 1.4 1.2 1.1 8 4 2 1
② Example of second floor
1.8 1.4 1.2 1.1 8 4 2 1
③ Example of third floor
1.8 1.4 1.2 1.1 8 4 2 1
④ Example of forth floor
1.8 1.4 1.2 1.1 8 4 2 1
⑤ Example of fifth floor
1.8 1.4 1.2 1.1 8 4 2 1
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 19 -
⑥ Example of sixth floor
1.8 1.4 1.2 1.1 8 4 2 1
-
-
-
⑦ Example of 16 floor
1.8 1.4 1.2 1.1 8 4 2 1
⑧ Example of 17 floor: S/W 1 S/W 2
1.8 1.4 1.2 1.1 8 4 2 1
-
-
-
⑨ Example of 22 floor
1.8 1.4 1.2 1.1 8 4 2 1
-
-
-
⑩ Example of 33 floor
1.8 1.4 1.2 1.1 8 4 2 1
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 20 -
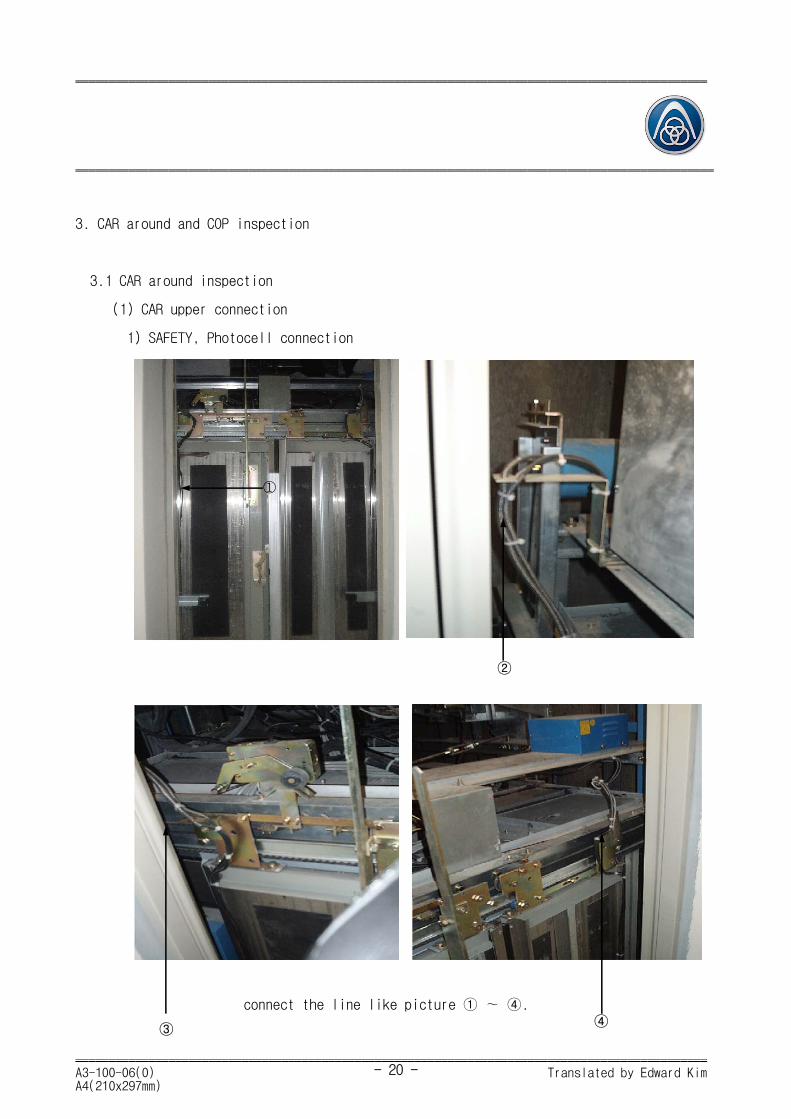
3. CAR around and COP inspection
3.1 CAR around inspection
(1) CAR upper connection
1) SAFETY, Photocell connection
connect the line like picture ① ∼ ④.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
②
③④
①

- 21 -
2) DOOR S/W connection
3) All kind of switch connection such as governor S/W, emergency S/W, Light S/W
3.2 COP inspection
1) CCU connection
※ Caution : connection of ①, ②, ③ are follows.
CN7A : MAIN for person, CN8A : MAIN for handicap
CN7B : SUB for person, CN8B : SUB for handicap
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
좌측 그림의 지시선과 같이 CAR
DOOR가 10mm의 틈새가 있을때
로라는 Cam의 모서리에 위치
하도록 하고, 이때 접점은 Touch
되도록 한다.
③
②①
Make position roller edge of
cam if door has gap 10 mm,
and contact point should be
touched.

- 22 -
CN6A : A1,A2 ∼ A5 MAIN for person
CN6A : B1,B2 ∼ B5 SUB for person
CN6B : A1,A2 ∼ A5 MAIN for handicap
CN6B : B1,B2 ∼ B5 SUB for handicap
2) A distribution diagram of Cop communicate line, in case of LDM Type.
Machine room (MNCU-SLS1A,1B) ⇒ LDM PCB ⇒ CCU (CN2)
3.3 DOOR C/P inspection
(1) DOOR SPEED control
1) Door C/P installation
Open the cover of Door Controller and then using of S/W2 ∼ S/W5 in the
upper as follows
NO MODE Disply Contents Remark
1 Auto Axx Act according to output signal xx(op,cL)
2 Measure door width 000 Measure door width
3 Manual dt Act by key input
4 Control opening speed oHx 4P: 15 - 30Hz, 6P: 20 - 40Hz LEVEL 0-9
5 Control closing speed cHx 4P: 15 - 30Hz, 6P: 20 - 40Hz LEVEL 0-9
6 Opening reduction zone Lox 20 ∼ 50% LEVEL 0-9
7 Closing reduction zone Lc 20 ∼ 50% LEVEL 0-9
8 Opening standstill tox LEVEL 0-9
9 Closing standstill tcx LEVEL 0-9
10 Maximum Torque Htx
11 Door Measured value xxx
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 23 -
2) Door type setting
According Door type, setting S/W2 by the using of J1,J2.
DLL TYPE : J1 ⇒ ■ ■ □ , SIDE OPEN TYPE : J2 ⇒ ■ ■ □
DSL TYPE : J1 ⇒ □ ■ ■ , CENTER OPEN TYPE : J2 ⇒ □ ■ ■
3) MODE convert method
AcL(op)
(AUTO MODE)
PRESS MODE BUTTON
→ ONCE ←
dt
(MANUAL MODE)
↑↓ PRESS MODE
BUTTON TWICE
QUICKLY.
↑↓ PRESS MODE
BUTTON TWICE
QUICKLY.
000
MEASURE DOOR
WIDTH
↑
It is converted
automatically
after measuring
door width.
OHx
CONTROL OPENING
SPEED→
CHx
CONTROL
CLOSING SPEED
↑ PRESS MODE
BUTTON ONCE↓
Htx
Control
maximumt torque→
xxx
Measurement of
door width
Lox
Control
closing
reduction
zone.
↑
tcx
Control closing
standstill
←
tox
Control opening
standstill
←
Lcx
Control
closing
reduction
zone
* x is one of number from 0 to 9.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 24 -
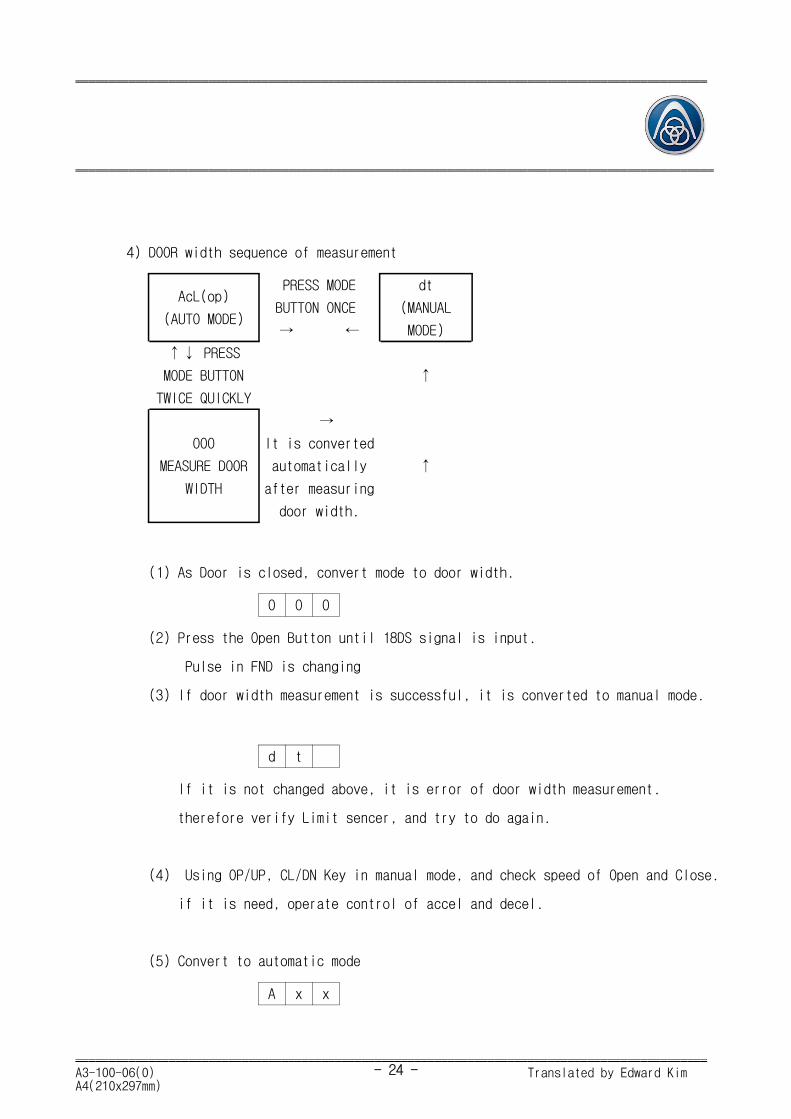
4) DOOR width sequence of measurement
AcL(op)
(AUTO MODE)
PRESS MODE
BUTTON ONCE
→ ←
dt
(MANUAL
MODE)
↑↓ PRESS
MODE BUTTON
TWICE QUICKLY
↑
000
MEASURE DOOR
WIDTH
→
It is converted
automatically
after measuring
door width.
↑
(1) As Door is closed, convert mode to door width.
0 0 0
(2) Press the Open Button until 18DS signal is input.
Pulse in FND is changing
(3) If door width measurement is successful, it is converted to manual mode.
d t
If it is not changed above, it is error of door width measurement.
therefore verify Limit sencer, and try to do again.
(4) Using OP/UP, CL/DN Key in manual mode, and check speed of Open and Close.
if it is need, operate control of accel and decel.
(5) Convert to automatic mode
A x x
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 25 -
5) Control of DOOR speed
(1) Press mode button quickly twice in manual mode
d t ⇒ O H x
(2) it would be changed, whenever you press Mode Button like this :
OHx → CHx → Lox → Lcx → tox → tcx → Htx → xxx → OHx.
(3) OP KEY(As you press Key once, it would be increased.), CL KEY (As you
press Key once, it would be decreased.). setting a level which you want
by using this, and then press the button once make it input.
after input, if you want to move to another mode, just press the mode
button again.
(4) after adjustment, press button two times quickly. the automatic
mode would be come.
(5) Basic value is as follows:
Indication Contents Range Basic Value
oH 0 Opening speed oH 0 - 9
cL 0 Closing speed cL 0 - 9
Lo 0 Opening decrease section Lo 0 - 9
Lc 0 Closing decrease section Lc 0 - 9
to 0 Opening stoppage to 0 - 9
tc 0 Closing stoppage tc 0 - 9
Ht 0 Maximum Torque Ht 0 - 9
6) SDI-485 AC Door[Tops(Yongjin),Shinyoung]
(1) SDI-485 AC Door CP
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 26 -
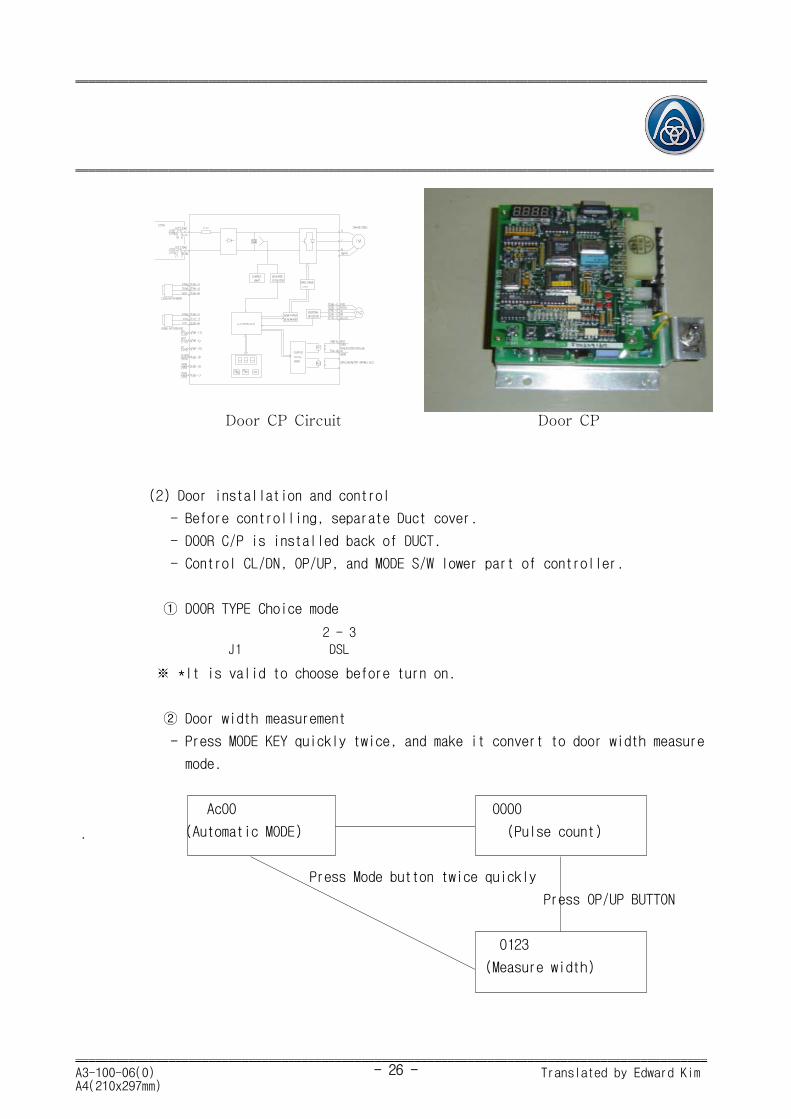
Door CP Circuit Door CP
(2) Door installation and control
- Before controlling, separate Duct cover.
- DOOR C/P is installed back of DUCT.
- Control CL/DN, OP/UP, and MODE S/W lower part of controller.
① DOOR TYPE Choice mode
2 - 3
J1 DSL
※ *It is valid to choose before turn on.
② Door width measurement
- Press MODE KEY quickly twice, and make it convert to door width measure
mode.
Ac00 0000
(Automatic MODE) (Pulse count)
Press Mode button twice quickly
Press OP/UP BUTTON
0123
(Measure width)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 27 -
③ Sequence of door width measurement
ⓐ Using CL BUTTON or DT signal, move door to condition of DS23 LIMIT.
ⓑ Convert to door width measure mode.
display 0000ⓒ Using P BUTTON, move it to DS18 LIMIT.
display 0123ⓓ As it completed of door width measurement, press MODE KEY twice
quickly to automatic mode.
ⓔ Automatic mode drive
display Ac xx (xx:Driving condition value)
ⓕ After door opens completely, Belt has to be adjusted to prevent
motor slip phenomenon
(3) Manual motion method
Ac00 nc00
(Automatic MODE) (Pulse count)
Press MODE KEY
once It is available to control
using OP KEY and CL KEY
nc00/no00
(Manual motion)
(4) Opening DATA amendment
① Press MODE KEY and OP KEY at the same time.(amend DATA)
- In case of changing DATA, if you press MODE KEY once it would be
saved, and then press it is changed again to control mode.
- If you press MODE KEY twice quickly, it comes to manual mode.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 28 -
(5) Closing DATA change.
① Press MODE KEY and CP KEY at the same time in manual mode.
- In case of changing DATA, if you press MODE KEY once it would be
saved, and then press it again changed to control mode.
- If you press MODE KEY twice quickly, it comes to manual mode.
(6) Pattern control table
NO Control function Range Indication Remarks
1 Opening soft start section 0 - 9 OSS open soft start
2 Opening soft start angle 0 - 9 OSr open soft rise
3 Opening soft start torque 0 - 9 OSt open soft torque
4 Opening soft start speed 0 - 9 OSP open soft speed
5 Opening increase section 0 - 9 OaS open accel section
6 Opening accel section angle 0 - 9 Oar open accel rise
7 Opening accel section torque 0 - 9 Oat open accel torque
8 Opening speed 0 - 9 OPS open speed
9 Opening torque 0 - 9 OPt open torque
10 Opening reduction section 0 - 9 OrS open reduction section
11 Opening reduction torque 0 - 9 Ort open reduction torque
12 Opening end torque 0 - 9 OEt open end torque
13 Closing accel section 0 - 9 CaS close accel section
14 Closing accel section angle 0 - 9 Car close accel rise
15 Closing accel section torque 0 - 9 Cat close accel torque
16 Closing speed 0 - 9 CLS close speed
17 Closing torque 0 - 9 CLt close torque
18 First closing reduction section 0 - 9 CrS close reduction section
19 First closing reduction torque 0 - 9 Crt close reduction torque
20Second closing reduction
section0 - 9 CtS close reduction section
21 Second closing reduction torque 0 - 9 Ctt close reduction torque
22 Closing end torque 0 - 9 CEt close end torque
23 reopen torque 0 - 9 rot reopen torque
24 reopen reduction distance 0 - 9 ror reopen reduction
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 29 -
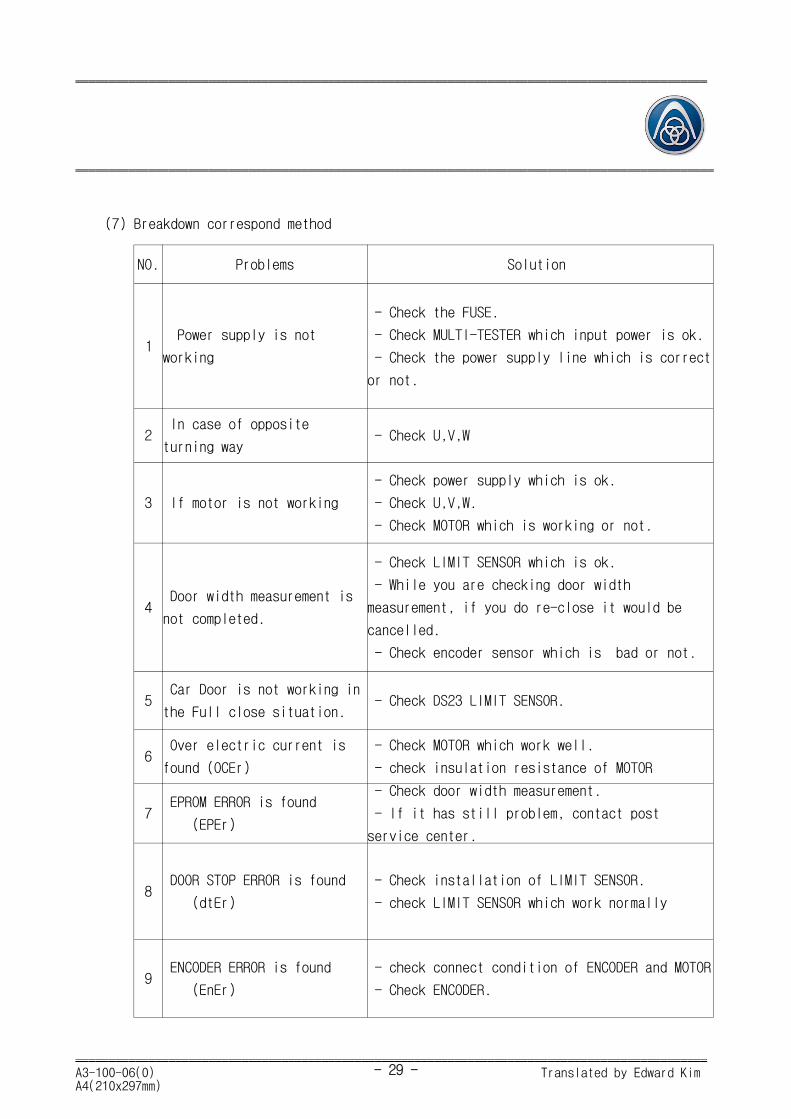
(7) Breakdown correspond method
NO. Problems Solution
1Power supply is not
working
- Check the FUSE.
- Check MULTI-TESTER which input power is ok.
- Check the power supply line which is correct
or not.
2In case of opposite
turning way- Check U,V,W
3 If motor is not working
- Check power supply which is ok.
- Check U,V,W.
- Check MOTOR which is working or not.
4Door width measurement is
not completed.
- Check LIMIT SENSOR which is ok.
- While you are checking door width
measurement, if you do re-close it would be
cancelled.
- Check encoder sensor which is bad or not.
5Car Door is not working in
the Full close situation.- Check DS23 LIMIT SENSOR.
6Over electric current is
found (OCEr)
- Check MOTOR which work well.
- check insulation resistance of MOTOR
7EPROM ERROR is found
(EPEr)
- Check door width measurement.
- If it has still problem, contact post
service center.
8DOOR STOP ERROR is found
(dtEr)
- Check installation of LIMIT SENSOR.
- check LIMIT SENSOR which work normally
9ENCODER ERROR is found
(EnEr)
- check connect condition of ENCODER and MOTOR
- Check ENCODER.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 30 -
6) VMF-200 AC Door[Chung Woo]
(1) VMF-200 AC Door CP
Door CP Circuit Door CP Picture
(2) Door install and control
- Before controlling, separate Duck cover.
- DOOR C/P is installed on the back of DUCT.
- Control it by using of SW1 - SW8 in controller.
(3) Automatic Door width measurement
- As control test of door device, you have to do as follows.
① PARAMETER P30(System reduction rate) should be inputted according to
DOOR TYPE accurately.
② Installing Data of PARAMETER P33(System data initialization) and
making it as 1 to initialize.
③ Initializing data of PARAMETER P31(Automatic measurement)
is to �1�, and it is coming back with automatic measurement
- Automatic measurement in the opening situation
18DS motion -> Close motion -> After 23DS motion, it is completed
- Automatic measurement in the closing situation
Open motion(JOG Speed) -> 18DS motion -> Close motion ->
After 23DS motion, it is completed.
※ After 18DS motion start position is saved automatically,
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 31 -
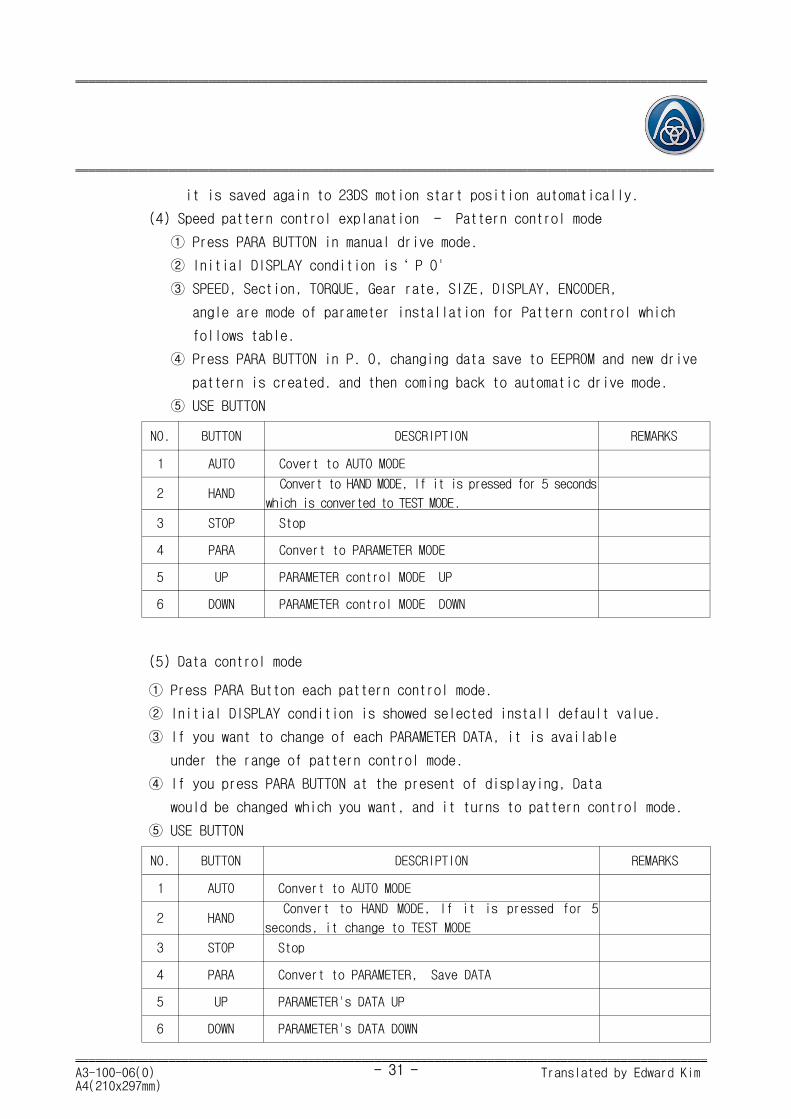
it is saved again to 23DS motion start position automatically.
(4) Speed pattern control explanation - Pattern control mode
① Press PARA BUTTON in manual drive mode.
② Initial DISPLAY condition is � P O'
③ SPEED, Section, TORQUE, Gear rate, SIZE, DISPLAY, ENCODER,
angle are mode of parameter installation for Pattern control which
follows table.
④ Press PARA BUTTON in P. O, changing data save to EEPROM and new drive
pattern is created. and then coming back to automatic drive mode.
⑤ USE BUTTON
NO. BUTTON DESCRIPTION REMARKS
1 AUTO Covert to AUTO MODE
2 HANDConvert to HAND MODE, If it is pressed for 5 seconds
which is converted to TEST MODE.
3 STOP Stop
4 PARA Convert to PARAMETER MODE
5 UP PARAMETER control MODE UP
6 DOWN PARAMETER control MODE DOWN
(5) Data control mode
① Press PARA Button each pattern control mode.
② Initial DISPLAY condition is showed selected install default value.
③ If you want to change of each PARAMETER DATA, it is available
under the range of pattern control mode.
④ If you press PARA BUTTON at the present of displaying, Data
would be changed which you want, and it turns to pattern control mode.
⑤ USE BUTTON
NO. BUTTON DESCRIPTION REMARKS
1 AUTO Convert to AUTO MODE
2 HANDConvert to HAND MODE, If it is pressed for 5
seconds, it change to TEST MODE
3 STOP Stop
4 PARA Convert to PARAMETER, Save DATA
5 UP PARAMETER's DATA UP
6 DOWN PARAMETER's DATA DOWN
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 32 -
** Under the performance of Opening and Closing, Control each PARAMETER DATA.
(6) Pattern control table
Paramete
rFunction
Range
(Basic
value)
Contents
P 0모드 변경 선택
(Mode Change)
When it is converted to manual drive mode, press
para button in P O and then press hand button.
P01열림 초기 저속 구간시간
(Open Soft Start Time)(ms)
10 ~ 1000
(40)Open soft start time.
P02열림 초기 저속 구간속도
(Open Soft Speed)(mm/s)
20 ~ 200
(100)Open soft speed.
P03열림 가속 기울기
(Open Accel Rate)(mm/s2)
100~4000
(1000)Open Accel rate
P04열림 속도
(Open High Speed)(mm/s)
100~1200
(410)Open high speed.
P05열림 감속 기울기
(Open Decel Rate)(mm/s2)
100~4000
(1000)Open Decel rate.
P06열림 크리핑 거리
(Open Creeping Distance)(mm)
5 ~ 100
(5)Door creeping distance.
P07열림 크리핑 속도
(Open Creeping Speed)(mm/s)
20 ~ 100
(45)Open creeping speed.
P08열림 끝단 정지 기울기
(OLS on Stop Decel Rate)(mm/s2)
20 ~ 500
(500)When it Opens, after OLS motion reduction stop rate
P09열림 토오크
(Open Torque)(%)
0 ~ 50
(25)
Door open motor torque. (if it is installed too
high or too low, it is not smooth to open)
P10열림 끝단 정지 토오크
(OLS on Stop Torque)(%)
0 ~ 50
(25)
Stop torque which maintain open door.
(If it is installed too high, motor can be
overheatted)
P11닫힘 가속 기울기
(Close Accel Rate)(mm/s2)
100~4000
(2500)Close accel rate.
P12닫힘 속도
(Close High Speed)(mm/s)
100~1200
(480)Close high speed.
P13닫힘 감속 기울기
(Close Decel Rate)(mm/s2)
100~4000
(1100)Close decel rate.
P14닫힘 크리핑 거리
(Close Creeping Distance)(mm)
5 ~ 100
(35)Close creeping distance.
P15닫힘 크리핑 속도
(Close Creeping Speed)(mm/s)
20 ~ 100
(25)Close creeping speed.
P16닫힘 끝단 정지 지연시간
(CLS on Running Time)(ms)
200 ~ 5000
(1500)
Time which From the point of close door to stop
door.
(If it is installed too high, crash noise and a gap
could be happen.)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 33 -
P17닫힘 끝단 속도
(CLS on Running time)(ms)
5 ~ 50
(20)
Speed which From the point of close door to stop
door.
P18닫힘 토오크
(Closing Torque)(%)
0 ~ 50
(25)
Motor torque as door closed (If it is installed too
high or too low, it is not smooth to open)
P19넛징 닫힘 속도
(Nudging High Speed)(mm/s)
100 ~ 600
(200)Nudging high speed
P20
도아 개폐 수행 중 정지 기울기
(Open, Close Stop Decel
Rate)(mm/s2)
100 ~ 4000
(450)Open, Close Stop Decel Rate
P21재개방 가속 기울기
(Re-Open Accel Rate)(mm/s2)
100 ~ 4000
(450)Re-Open Accel Rate
P22조그 속도
(Jog speed)(mm/s)
50 ~ 200
(120)
Door Jog speed. (System breakdown or automatic
measurement)
P23닫힘 끝단 정지 토오크
(CLS on Stop Torque)(%)
0 ~ 50
(30)
Motor torque as door closed (If it is installed too
high or too low, it is not smooth to open)
P24 - -
P25 - -
P26 - -
P27도아 종류 선택
(Door Type Select)
0 ~ 1
(0)
0 : DSL , Center Open Type
1 : DLL , Side Open Type
P28 Error (-)Read only parameter
(Indicate recent Errors as sequence)
P29 Encorder Purse rate(PPR)100 ~ 2500
(200)
Encorder purse rate which is installed to motor
axis.
P30System reduction rate
(mm/motor rev.)
10 ~ 150
(47)Movement distance of door panel per one spin.
P31자동 측정
(Auto Calibration)
0 ~ 1
(0)
Set "1” and press PARA button. and measure the
distance of door panel automatically.
(It is necessary to automatic measure when it is
needed to control vertical sensor or door device.)
P32도아 판넬 스트록
(Door Panel Stroke)(mm)(-)
Read only parameter (Total movement distance which
is measured automatically)
P33시스템 데이터 초기화
(System Data Initial)
0 ~ 1
(0)
Set "1" and press PARA button, data would be
initialized with "ERS'
P34운전상태 표시 선택
(Display Mode)
0 ~ 4
(0)
It is available to choose contents to be displayed
on the auto/manual drive mode.
0 : Input signal(OP, CL)
1 : Input encorder purse rate
2 : Operating motor rate (rpm)
3 : Operating speed(mm/s)
4 : Output signal(Hz)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 34 -
(7) A solution when it is in trouble. [Chung-woo]
NO.ERROR
DISPLAYCondition Occurrence Solution
Rema
rk
1 - -* It is cut power
supply
- Check input power with MULTI-TESTER
- Check electricity power line which is
connected ot not
2 - -
* A slight movement is
existed repeatedly
under closure.
- Check spring of speed reduction machine인
- Make 23 PARAMETER value low.
3 - -* Door is getting close
slightly from opening.
- Raise PARAMETER No. 10.
- Raise PARAMETER No. 7.
4 - -
* I f d o o r w i d t h
m e a s u r e m e n t i s
d i f f e r e n t e v e r y
t i m e .
* I f d o o r i s
o p e n e d w i t h o u t
r e d u c i n g s p e e d .
- check encorder which is ok or not.
- Re-measure door width with PARAMETER no.
31.
5 - - * Operation in JOGGING
- Check 'Er-b' which is displayed on screen
or not.
- Check door width at PARAMETER no. 32. if
it is 'O', remeasure door width.
6 Er-b
* Open is not completed
for 10 seconds while it
is opening.
* Close is not
completed for 10
seconds while it is
closing.
* After closing in
JOGGING and act with
normal.
- Check 18DS and 23DS which are connected
and acted properly.
- Check it is controlled by external strong
power.
7 Er-S
* 18DS and 23DS signal
are happened at the
same time.
* 'Er-b' is displayed
on screen without
operation.
- Check 18DS and 23DS which are connected
and acted properly.
8 Er-P
* Incase MOTOR spinning
direction and encorder
signal are not matched.
* Door operating
direction is opposite
to control.
* Door has heavy
vibration.
- Check lines which is right on U.V.W
- Check motor which is right or not.
9 Er-CS
* Signal of 23DS is not
checked for 10 seconds
while measuring door
width.
* Door is not measured
and operated in jogging.- Check 23DS which is connected and acted
properly.
10 Er-OS
* Signal of 18DS is not
checked for 10 seconds
while door width is
measuring.
* If "0000" is
displayed continually
- Check 18DS which is connected and acted
properly.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 35 -
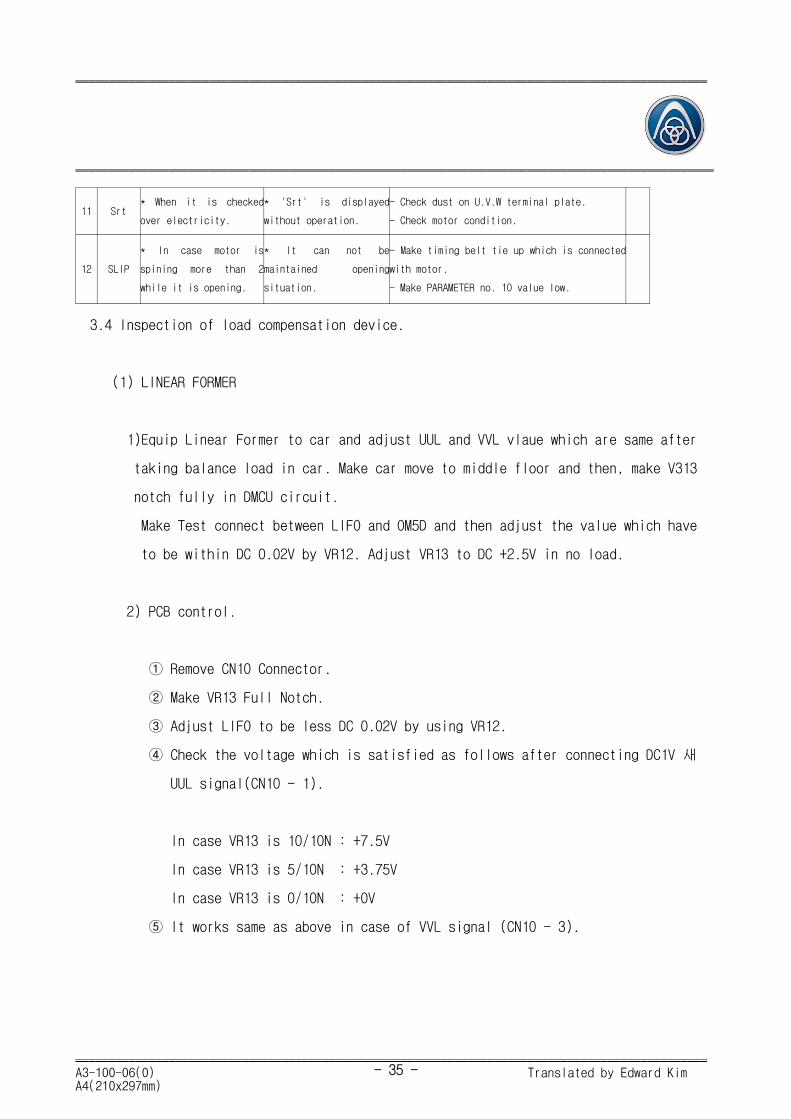
11 Srt* When it is checked
over electricity.
* 'Srt' is displayed
without operation.
- Check dust on U.V.W terminal plate.
- Check motor condition.
12 SLIP
* In case motor is
spining more than 2
while it is opening.
* It can not be
maintained opening
situation.
- Make timing belt tie up which is connected
with motor.
- Make PARAMETER no. 10 value low.
3.4 Inspection of load compensation device.
(1) LINEAR FORMER
1)Equip Linear Former to car and adjust UUL and VVL vlaue which are same after
taking balance load in car. Make car move to middle floor and then, make V313
notch fully in DMCU circuit.
Make Test connect between LIFO and OM5D and then adjust the value which have
to be within DC 0.02V by VR12. Adjust VR13 to DC +2.5V in no load.
2) PCB control.
① Remove CN10 Connector.
② Make VR13 Full Notch.
③ Adjust LIFO to be less DC 0.02V by using VR12.
④ Check the voltage which is satisfied as follows after connecting DC1V 새
UUL signal(CN10 - 1).
In case VR13 is 10/10N : +7.5V
In case VR13 is 5/10N : +3.75V
In case VR13 is 0/10N : +0V
⑤ It works same as above in case of VVL signal (CN10 - 3).
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 36 -
(2) POTENTIAL METER
1) General control
① Check overbalance between CAR and COUNTER CASE.(OVER BALANCE RATE : 45%)
② Equip POTENTIAL METER in car. Install potential meter which is pressed
about 3~5mm in without load.
(Spring tension should be enough to do in potential meter.)
③ Taking balance load to car and move to the middle floor and make VR13 full
notch in DMCU circuit.
④ Connect tester between LIF0 and COM5D and adjust VR12 to be within DC
+0.005V.
⑤ Adjust LIFO to be DC -2.5V by using VR13 in FULL LOAD(100%).
* It is strongly recommended to control weight after loading of 45% and 100%
which is completed by inspector because it takes lots of time and
difficulties.
2) Control of temporary setting.
① Check overbalance between CAR and COUNTER CASE.(OVER BALANCE RATE :45%)
② Equip potential meter in car. Install potential meter which is pressed
about 3~5mm in without load.
(Spring tension should be enough to do in potential meter.)
③ Taking car to the middle floor without any load.
④ Install L1FO and COM5D in DMCU circuit as follows.
Sequence
Weight
1st(VR13 in FULL NOTCH)
Adjust to VR12
2st(After completed to be set
VR12)
Adjust to VR13P11(750kg) DC +2.7V DC +2.0V
P13(900kg) DC +2.6V DC +2.0V
P15(1000kg) DC +2.7V DC +2.0V
P17(1150kg) DC +3.7V DC +2.1V
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 37 -
3) Chance of weight control DMCU DATA
① Connect miniconsol to DMCU. (DCON S/W is on MNCU.)
② Check factory basic setting and then adjust each data of starting in
terminal mode (MODE3 CR).
SWD000 :0064 CR 01 (after DMCU-3F)
0004 CR 03 (Option)
0082 CR 15 (NO LOAD UP) ⇒ Car without load and control roll back when it
starts.
0084 CR 30 (NO LOAD DOWN) ⇒ Car without load and control roll back when it
starts to down.
0086 CR 30 (FULL LOAD UP) ⇒ Car without load and control roll back when it
starts to up
0088 CR 15 (FULL LOAD DOWN) ⇒ Car with full load and control roll back when
it starts to down.
4. High speed control
4.1 PDSET Operation
(1) Control by CONSOLE
1) Turn on INSS switch in MNCU.
2) Turn on DIP switch no.1 (writing is available.)
3) Turn off DCONS switch.
4) F=1, F=2, F=3 및 F=C in MNCU Console Mode3.
5) Turn off INSS switch. Check PD in FND1, 2.
6) Car is downing and upping, it is stopped to the highest floor.
7) It takes to write for 10 sec in EEPROM, and then be re-levelled.
8) Turn off DIP switch no 1.(Writing is prohibited.)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 38 -
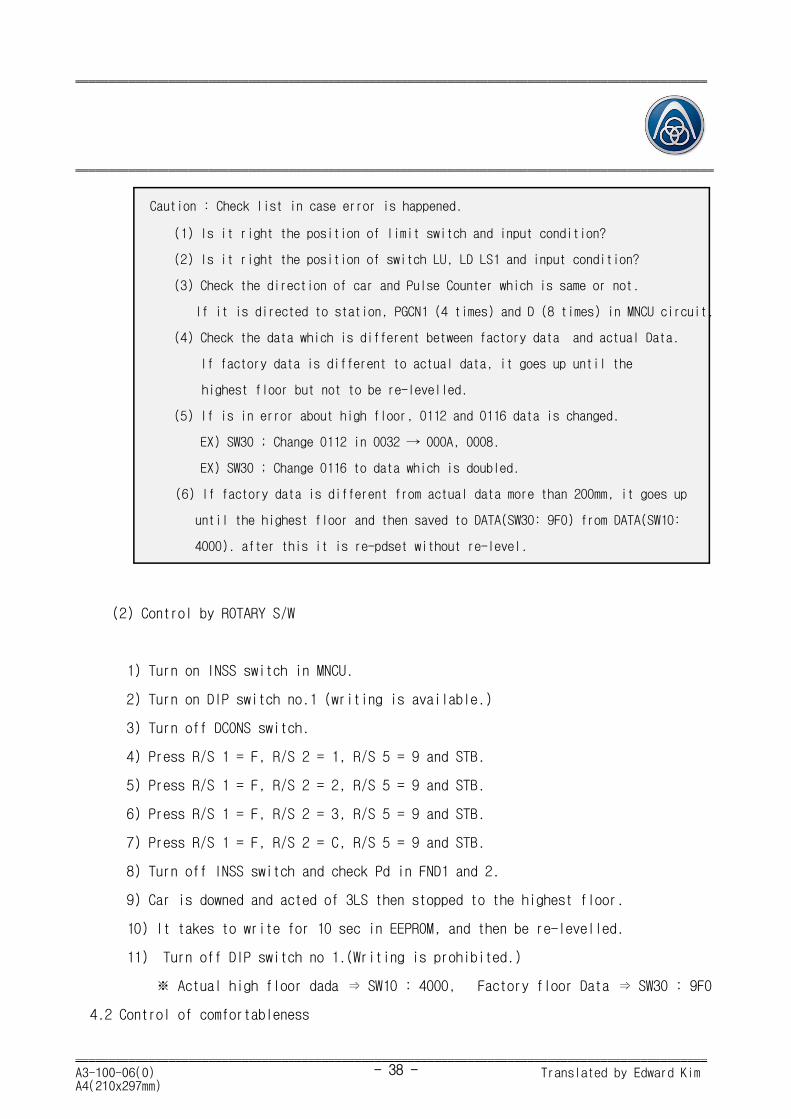
Caution : Check list in case error is happened.
(1) Is it right the position of limit switch and input condition?
(2) Is it right the position of switch LU, LD LS1 and input condition?
(3) Check the direction of car and Pulse Counter which is same or not.
If it is directed to station, PGCN1 (4 times) and D (8 times) in MNCU circuit.
(4) Check the data which is different between factory data and actual Data.
If factory data is different to actual data, it goes up until the
highest floor but not to be re-levelled.
(5) If is in error about high floor, 0112 and 0116 data is changed.
EX) SW30 ; Change 0112 in 0032 벒 000A, 0008.
EX) SW30 ; Change 0116 to data which is doubled.
(6) If factory data is different from actual data more than 200mm, it goes up
until the highest floor and then saved to DATA(SW30: 9F0) from DATA(SW10:
4000). after this it is re-pdset without re-level.
(2) Control by ROTARY S/W
1) Turn on INSS switch in MNCU.
2) Turn on DIP switch no.1 (writing is available.)
3) Turn off DCONS switch.
4) Press R/S 1 = F, R/S 2 = 1, R/S 5 = 9 and STB.
5) Press R/S 1 = F, R/S 2 = 2, R/S 5 = 9 and STB.
6) Press R/S 1 = F, R/S 2 = 3, R/S 5 = 9 and STB.
7) Press R/S 1 = F, R/S 2 = C, R/S 5 = 9 and STB.
8) Turn off INSS switch and check Pd in FND1 and 2.
9) Car is downed and acted of 3LS then stopped to the highest floor.
10) It takes to write for 10 sec in EEPROM, and then be re-levelled.
11) Turn off DIP switch no 1.(Writing is prohibited.)
※ Actual high floor dada ⇒ SW10 : 4000, Factory floor Data ⇒ SW30 : 9F0
4.2 Control of comfortableness
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 39 -
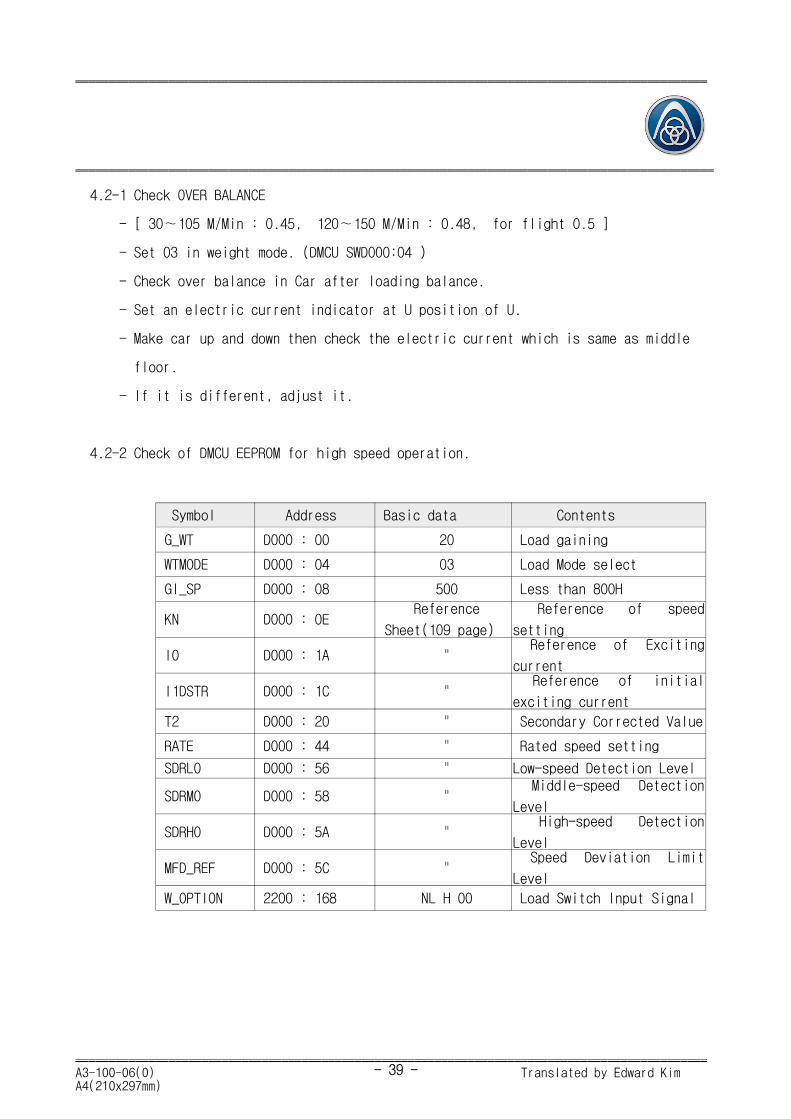
4.2-1 Check OVER BALANCE
- [ 30∼105 M/Min : 0.45, 120∼150 M/Min : 0.48, for flight 0.5 ]
- Set 03 in weight mode. (DMCU SWD000:04 )
- Check over balance in Car after loading balance.
- Set an electric current indicator at U position of U.
- Make car up and down then check the electric current which is same as middle
floor.
- If it is different, adjust it.
4.2-2 Check of DMCU EEPROM for high speed operation.
Symbol Address Basic data Contents
G_WT D000 : 00 20 Load gaining
WTMODE D000 : 04 03 Load Mode select
GI_SP D000 : 08 500 Less than 800H
KN D000 : 0EReference
Sheet(109 page)
Reference of speed
setting
I0 D000 : 1A "Reference of Exciting
current
I1DSTR D000 : 1C "Reference of initial
exciting current
T2 D000 : 20 " Secondary Corrected Value
RATE D000 : 44 " Rated speed setting
SDRL0 D000 : 56 " Low-speed Detection Level
SDRM0 D000 : 58 "Middle-speed Detection
Level
SDRH0 D000 : 5A "High-speed Detection
Level
MFD_REF D000 : 5C "Speed Deviation Limit
Level
W_OPTION 2200 : 168 NL H 00 Load Switch Input Signal
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 40 -
4.2-3 GUIDELINES ON ADJUSTMENT OF RIDING COMFORT
(1) Setting of Analog Output
In DY-20, the control of speed, controls of speed, current, etc. are made by
software with digital circuits. Therefore, D/A conversion is required for
measuring the wave shape using mini-writer or oscilloscope. DY-20 has 2 D/A
conversions channels: A01 and A02
1) Select the required one from the symbol table for analog output on the next
page.
2) Set the selected one at output address (DA1ADD or DA2ADD).
3) Set the size of output gain (DA1GAIN or DA2GAIN).
4) Connect the mini-writer between A01- COM and A02 - COM, and take measurement.
Example) In case of outputting FRREF through A01
A01DA1ADD SWD000 : 6C 000C
DA1GAIN SWD000 : 6E 3000
Example) In case of outputting FR through A02
A02DA2ADD SWD000 : 70 000A
DA2GAIN SWD000 : 72 3000
묻 Symbol table for analog output
SYMBOL ADDRESS GAIN STANDARD Description
S_W0 0002 1000 Speed feedback (1BIT = 0.05m/min)
WREF 0006 1000 Speed command (1BIT = 0.05m/min)
FR 000A 3000 Speed feedback (S_W0 * KN)
FRREF 000C 3000 Speed command (WREF * KN)
TM 0014 400 TORQUE command
TLB 0016 400 Load signal
T_SP 001C 3000 Speed AMP Output
The above are typical symbols, and any other RAM data output is possible.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 41 -
To output desired data, refer to Worm RAM Area as below.
[ SPEED WORK RAM AREA ]
ADDRESS SYMBOL Description
SW2200 : 00 A_W0Absolute value of speed feedback (1bit =
0.05m/min)
SW2200 : 02 S_W0 Speed feedback (1bit = 0.05m/min) FR/KN
SW2200 : 04 A_WREF Absolute value of speed command
SW2200 : 06 WREF Speed command (1bit = 0.05m/min)
SW2200 : 0A FR Speed
SW2200 : 0C FRREF Speed command(WREF * KN)
SW2200 : 10 A_MFD Absolute value of MFD
[ PIAL WORK RAM AREA ]
ADDRESS SYMBOL Description
SW2200 : 12 D_SP SPEED DEVIATION
SW2200 : 14 TM TORQUE command
SW2200 : 16 TLB Load signal
SW2200 : 1C T_SP Speed AMP Output
SW2200 : 1E TA Speed AMP output (after limit processing)
SW2200 : 20 CURH Current simulation value (Vibration control)
SW2200 : 22 FRH_H Speed simulation value(H) (Vibration control)
SW2200 : 24 FRH_L Speed simulation value(L) (Vibration control)
SW2200 : 26 D_SPH Speed Deviation (Vibration portion)
SW2200 : 28 TLH Vibration control compensation portion
SW2200 : 42 I_SPL Integral value of speed control (L)
SW2200 : 44 I_SPM Integral value of speed control (M)
SW2200 : 46 I_SPH Integral value of speed control (H)
SW2200 : 2A5 TLS Start load compensation Portion
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 42 -
[ VECTOR WORK RAM AREA ]
ADDRESS SYMBOL Description
SW2200 : 34 I1D D- Axis current command
SW2200 : 36 I1Q D- Axis current command
SW2200 : 38 FSHW Slip frequency command (H)
SW2200 : 3A FSLW Slip frequency command (L)
SW2200 : 3E VECFLG Vector control flag
SW2200 : 48 I0SH Secondary magnetic flux simulation value (H)
SW2200 : 4A I0SL Secondary magnetic flux simulation value (L)
SW2200 : 4C I0CH exciting current command check value (H)
(2) Zero adjustment of current sensor
As zero adjustment and checkup sensor affects the riding comfort directly
accurate adjustment and checkup are required.
1) Position INSS (INS switch) at ON.
2) Apply the power to the control pannel.(묻 Caution : Do not drive the
Inverter)
3) In case of DMCU-3C : Set IUF and IVF less than 0.001V with VR5 and VR6.
CHECK-PIN VR-NO. Setting ValueIUF VR5 0.001VIVF VR6 0.001V
4) In case of DMCU-3F :
- Set VR5 and VR6 to 5N.
- Set IUF-COM5D to VR15 and IVF-COM5D to VR16 to be ±0.000V.
(3) Check of speed respond
1) Balance-load the car, and move it to a middle floor and put it in INS mode.다.
2) Set the inspection speed at 16 m/min. ( SWD000:3E )
3) Put the inspection speed filter(KTS) in CUT condition. (SWD000:40=7FFF)
4) Put the load digital gain in CUT condition. (SWD000:00=0000)
5) connect the mini-writer to A01 and A02, and output FRREF at A01 and FR ar A02
respectively.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 43 -
6) In INS Mode, set the over shoot rate to be 5∼10% during up or down run.
7) If not over shot, change the value of GA_SP(SWD0000:0A)
(When necessary, change the value of GP_SP(SWD000:06) and GI+_SP(SWD000:08)
also.)
8) After check or adjustment, make sure to return KTS1, INS_RATE to the original
state.
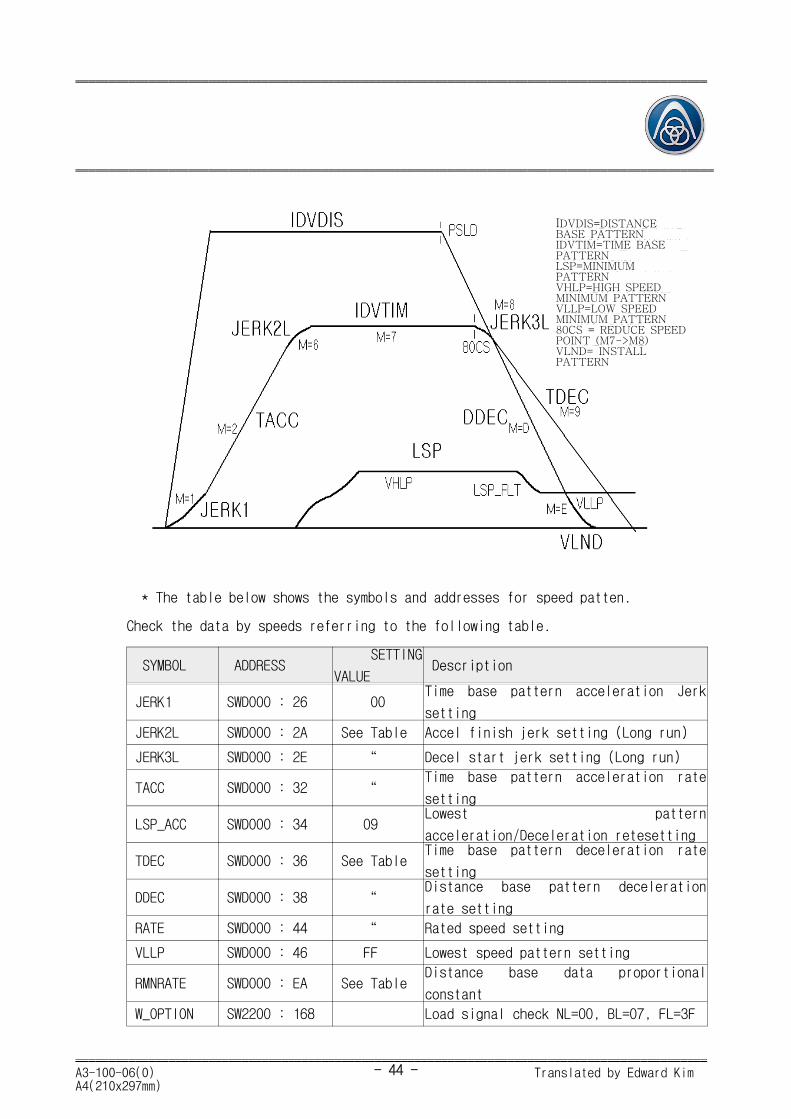
(3) LONG RUN Adjustment
1) The following figure shows the names of symbols responding to long run
waveform.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
OVER SHOOT 율 Δ V/VINS * 100(%)
- 44 -
* The table below shows the symbols and addresses for speed patten.
Check the data by speeds referring to the following table.
SYMBOL ADDRESSSETTING
VALUEDescription
JERK1 SWD000 : 26 00Time base pattern acceleration Jerk
setting
JERK2L SWD000 : 2A See Table Accel finish jerk setting (Long run)
JERK3L SWD000 : 2E � Decel start jerk setting (Long run)
TACC SWD000 : 32 �Time base pattern acceleration rate
setting
LSP_ACC SWD000 : 34 09Lowest pattern
acceleration/Deceleration retesetting
TDEC SWD000 : 36 See TableTime base pattern deceleration rate
setting
DDEC SWD000 : 38 �Distance base pattern deceleration
rate setting
RATE SWD000 : 44 � Rated speed setting
VLLP SWD000 : 46 FF Lowest speed pattern setting
RMNRATE SWD000 : EA See TableDistance base data proportional
constant
W_OPTION SW2200 : 168 Load signal check NL=00, BL=07, FL=3F
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
IDVDIS=DISTANCEBASE PATTERNIDVTIM=TIME BASEPATTERNLSP=MINIMUMPATTERNVHLP=HIGH SPEEDMINIMUM PATTERNVLLP=LOW SPEEDMINIMUM PATTERN80CS = REDUCE SPEEDPOINT (M7->M8)VLND= INSTALLPATTERN

- 45 -
2) LONG RUN PATTERN ADJUSTMENT
Verify that the data shown in the following table are correct based on the
sheave and gear ratio.
SYMBOL ADDRESS Descriptions
DBIA SWD000 : 4E Advance distance base incline setting
VDBIA SWD000 : 50 Distance base pattern incline setting
KLND SWD000 : B6Landing pattern constant = 200mm (Fixed based
on sheave and gear ratio)
RE_DIS SWD000 : B8Landing distance = 200mm (Fixed based on sheave
and gear ratio)
LUDCMP SWD000 : BA15mm Moving data after LU/LD is off.
(Fixed based on sheave and gear ratio)
PTNMOD S2200 : 2A9Travel pattern mode is indicated.
"D" in distance base mode, "E" in landing mode.
묻Set to display PTNMOD and then verify that it is switched by the level
error and distance base while travelling the car. (Verify that "D" is indicated
during slow down.)
Change of PTNMOD in long run : 0 ->1 ->2 ->6 ->7 ->8 ->9(D) ->E
Change of PTNMOD in short run: 0 ->1 ->2 ->3 ->4 ->5(D) ->E
If acceleration/deceleration shock or landing level error occurs, adjust in
the way as follows.
3) Shock compensation in entering the door zone
Check the data of LNDCMP(SW2200:2AD) during long run of the car.
If the value of LNDCMP is a negative (FFXX), decrease the value of
DBIA(SWD000:4E), If it is a positive, increase DBIA value. It is desired to
set this value within 0000 ~ 0005
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 46 -
SYMBOL ADDRESS Status Optimum value
LNDCMP SW2200 : 2ADNegative
(FFXX)
Positive
(00XX)0000 ~ 0005
DBIA SWD000 : 4E Decrease Increase
VDBIA SWD000 : 50
It can be conbined with the landing pattern by moving the pattern parallel
with DBIA. In the above figure, if it is a negative, decrease DBIA to combine
with the landing pattern properly, and if it is a positive, increase it. However,
if the incline between the distance base pattern and the landing pattern is
different, there may be a shock at the part of combine with the landing pattern
properly. To do this, it needs to change the value of VDBIA as shown in the figure
below.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
Negative Number PositiveNumber

- 47 -
In the above figure, if the waveform of "B" is the present waveform, it will
move toward "A" by increasing VDBIA and toward "C" by decreasing it.
If increased, the riding comfort will be enhanced, but it is possible to loose
the patten. Therefore, avoid excessive increase.
※ When shock occurs even though the waveform of the pattern is good by DBIA,
adjust VDBIA(SWD000:50) to enhance the riding comfort. If the landing level is
unstable, increase GI_SP(SWD000:08) or decrease GA_SP(SWD000:0A). Otherwise,
increase the value of GP_SP(SWD000:06).
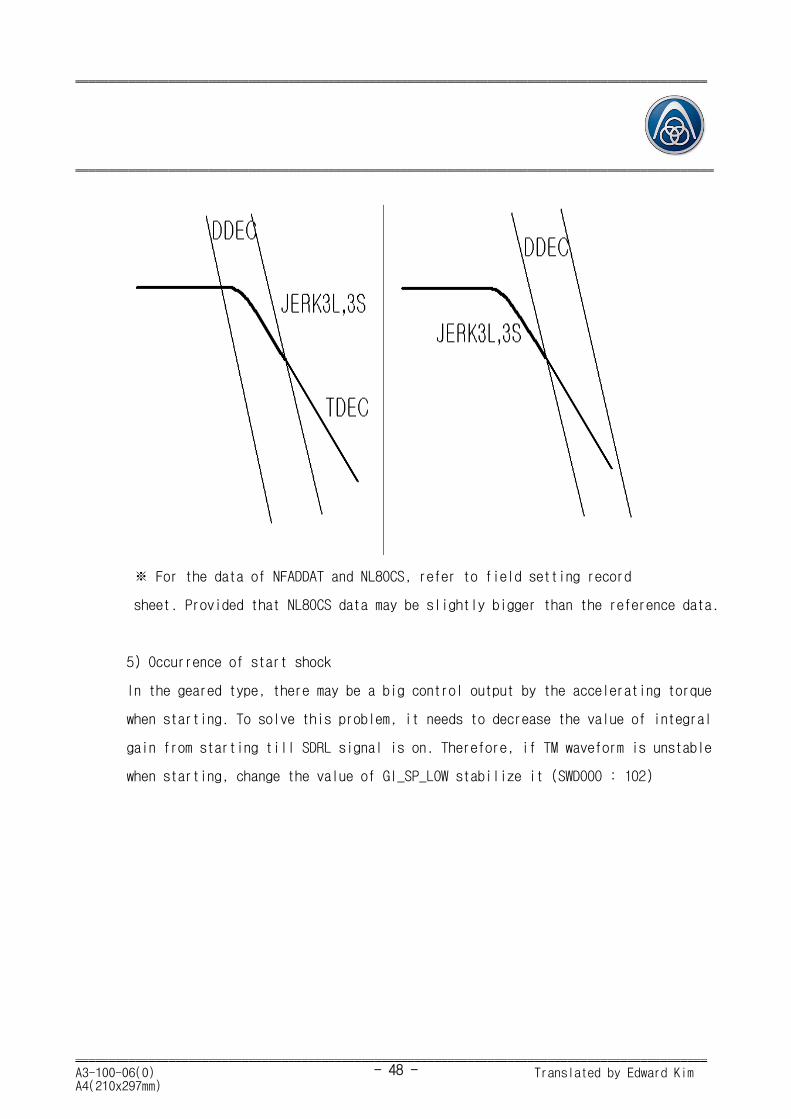
(4) Adjustment of 80CS
1) If shock occurs at the switching point from the time base to the distance
base, change the value of NL80CS to remove shock (MNCU Board SW0030:03).
2) Check the value of DISCMP to check the switching point of slow down
(SW2200:2AB). If the value is a negative, the switching point is in mode 7
(Normal speed mode) or mode 8(Slow down start jerk), and if it is a positive,
the switching point is in mode 9 (Constant slow down).
묻 Therefore, it is desired that this value is within FFF0 ~ 0010.
SYMBOL ADDRESS STATUS REMARK
DISCMP SW2200 : 2ABNegative
(FFXX)
Positive
(00XX)FFF0 ~ 0010
NL80CS SW30 : 02 Increase Decrease MNCU DATA
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
- 48 -
※ For the data of NFADDAT and NL80CS, refer to field setting record
sheet. Provided that NL80CS data may be slightly bigger than the reference data.
5) Occurrence of start shock
In the geared type, there may be a big control output by the accelerating torque
when starting. To solve this problem, it needs to decrease the value of integral
gain from starting till SDRL signal is on. Therefore, if TM waveform is unstable
when starting, change the value of GI_SP_LOW stabilize it (SWD000 : 102)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 49 -
(5) Short run adjustment
The figure below shows the waveforms of short run and corresponding symbols
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
Accelation Regularation Speed
Wave
Shock could be happened because TM waveangle is big.
Comfortableness is not good because feed backpattern is unstable by means of over shoot.
Time base accleate finishedJerk setting.
- 50 -
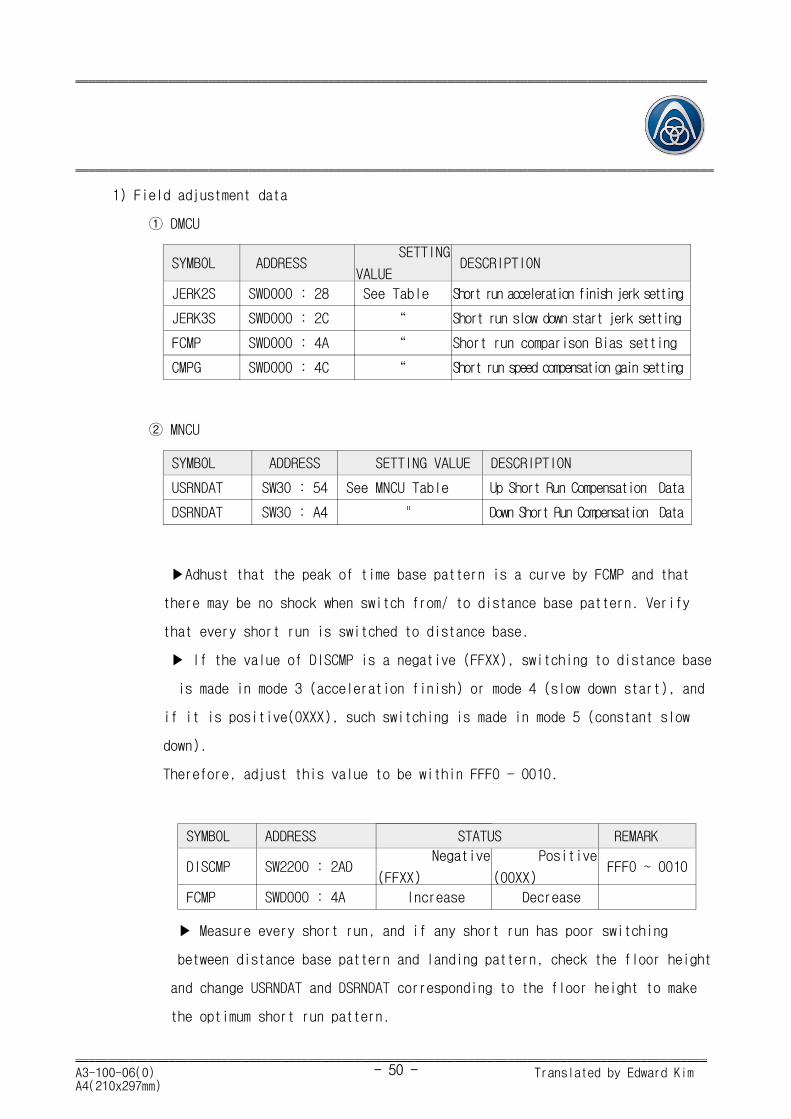
1) Field adjustment data
① DMCU
SYMBOL ADDRESSSETTING
VALUEDESCRIPTION
JERK2S SWD000 : 28 See Table Short run acceleration finish jerk setting
JERK3S SWD000 : 2C � Short run slow down start jerk setting
FCMP SWD000 : 4A � Short run comparison Bias setting
CMPG SWD000 : 4C � Short run speed compensation gain setting
② MNCU
SYMBOL ADDRESS SETTING VALUE DESCRIPTION
USRNDAT SW30 : 54 See MNCU Table Up Short Run Compensation Data
DSRNDAT SW30 : A4 " Down Short Run Compensation Data
▶Adhust that the peak of time base pattern is a curve by FCMP and that
there may be no shock when switch from/ to distance base pattern. Verify
that every short run is switched to distance base.
▶ If the value of DISCMP is a negative (FFXX), switching to distance base
is made in mode 3 (acceleration finish) or mode 4 (slow down start), and
if it is positive(0XXX), such switching is made in mode 5 (constant slow
down).
Therefore, adjust this value to be within FFF0 - 0010.
SYMBOL ADDRESS STATUS REMARK
DISCMP SW2200 : 2ADNegative
(FFXX)
Positive
(00XX)FFF0 ~ 0010
FCMP SWD000 : 4A Increase Decrease
▶ Measure every short run, and if any short run has poor switching
between distance base pattern and landing pattern, check the floor height
and change USRNDAT and DSRNDAT corresponding to the floor height to make
the optimum short run pattern.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 51 -
(6) Check of Relevel Pattern
SYMBOL ADDRESSSETTING
VALUEDESCRIPTION
RLVDATL SWD000:EC See Table Pattern data after LU & LD OFF
RLVDATM SWD000:EE � Pattern data from LS2 to LU & LD off
RLVDATH SWD000:F0 � Pattern data to LS1
Verify that the re-level pattern data corresponding to the above addresses are
correct according to the pulse rate. After making the car to be escaped slightly
by moving up or down in INS mode, return it to NOR mode. If the car is
over-leveled when re-leveling, decrease the above data slightly, and if it is
under-levelled, increase them.
(7) Weight compensation level adjustment
SYMBOL ADDRESSSETTING
VALUEDESCRIPTION
G_WT SWD000 : 00 30(20-35) Load Gain
WTMODE SWD000 : 04 03 Load Mode
1) Set Cut(SWD000 : 04) of TLS at 03, travel the car without load.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 52 -
2) Change G_WT data so that the values of STDLY_TM are almost same Up and Down
runs. (SW2200 : 2A7)
(8) Landing Adjustment
The data for the landing patterns are as below.
SYMBOL ADDRESSSETTING
VALUEDESCRIPTION
UG_LND SWD000 : A2 100 UP Landing Gain
DG_LND SWD000 : A4 100 DOWN Landing Gain
KLND SWD000 : B6 See TableConversion constant based on Pulse
Rate
RE_DIS SWD000 : B8 " 200mm data based on Pulse rate
LUDCMP SWD000 : BA " 15 mm data based on Pulse rate
LUDBRK SWD000 : BC " 17 mm data based on Pulse rate
PLSCNT SW2200 : 1DF Check RAM
1) If the level error is above 5 ~ 10 mm in landing, leveling compensation is
required. Data of moving distance after LU and LD are off can be obtained by
comparison between the values of PLSCNT and LUDCMP. It's good condition that the
data of PLSCNT is closer to the value of LUDCMP, and the difference should be
(LUDCMP/3) = 5mm or less.
2) If a certain floor has level error, check the mounting location of landing
Vane again.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
If STDLY_TM is over 20H, delaytime(32*8msec) becomes 256m sec sothat it gives shock when started.therefore it need start weightcompensation.
- 53 -
3) If the level error of every floor is same, check the mounting interval
location of landing switch again.
4) When there is level error though Landing Vane and Landing Switch are correct,
① If level is short,
Check the data of KLND and RE_DIS and if there is no problem, increase RE_DIS
by 20H
② If level is excessive,
Check the data of KLND and RE_DIS and if there is no problem, decrease RE_DIS
by 20H
5) Please note that there may be unstable level in case that the value of GP_SP
is too low.
6) Decreasing the value of GA_SP will make level stabilized.
7) Increasing the value of GA_SP will make level stabilized. However, excessive
decrease (above 800) will cause swing in travelling.
8) If re-leveling occurs, switching between the distance base and the landing
pattern is not conditioned. It needs readjustment from long run and short run.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 54 -
5. HCU SERIAL COMMUNICATION MAP
5.1 HALL CALL Button
▶ Hall Call Button
FLOOR ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
1F 10F HLCNT1 HLCNT0 SPR HDC EUHC EDHC UHC DHC
2F 110 HLCNT1 HLCNT0 SPR HDC EUHC EDHC UHC DHC
씳 씳 씳
80F 15E HLCNT1 HLCNT0 SPR HDC EUHC EDHC UHC DHC
(In case of 2-way opening option, front door will be used for 1F to 40F and rear
door will be used for 41F to 80F.)
▶ Normal Up Hall CALL Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
3A 8UHL 7UHL 6UHL 5UHL 4UHL 3UHL 2UHL 1UHL
씳 씳
43 80UHL 79UHL 78UHL 77UHL 76UHL 75UHL 74UHL 73UHL
▶ Normal Up Hall CALL Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
3A 8UHL 7UHL 6UHL 5UHL 4UHL 3UHL 2UHL 1UHL
3B 16UHL 15UHL 14UHL 13UHL 12UHL 11UHL 10UHL 9UHL
3C 24UHL 23UHL 22UHL 21UHL 20UHL 19UHL 18UHL 17UHL
3D 32UHL 31UHL 30UHL 29UHL 28UHL 27UHL 26UHL 25UHL
3E 40UHL 39UHL 38UHL 37UHL 36UHL 35UHL 34UHL 33UHL
3F 8BUHL 7BUHL 6BUHL 5BUHL 4BUHL 3BUHL 2BUHL 1BUHL
40 16BUHL 15BUHL 14BUHL 13BUHL 12BUHL 11BUHL 10BUHL 9BUHL
41 24BUHL 23BUHL 22BUHL 21BUHL 20BUHL 19BUHL 18BUHL 17BUHL
42 32BUHL 31BUHL 30BUHL 29BUHL 28BUHL 27BUHL 26BUHL 25BUHL
43 40BUHL 39BUHL 38BUHL 37BUHL 36BUHL 35BUHL 34BUHL 33BUHL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 55 -
▶ Normal Down Hall Call Lamp
FLOOR Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
44 8DHL 7DHL 6DHL 5DHL 4DHL 3DHL 2DHL 1DHL
씳 씳
4D 80DHL 79DHL 78DHL 77DHL 76DHL 75DHL 74DHL 73DHL
▶ Normal Down Hall Call Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
44 8DHL 7DHL 6DHL 5DHL 4DHL 3DHL 2DHL 1DHL
45 16DHL 15DHL 14DHL 13DHL 12DHL 11DHL 10DHL 9DHL
46 24DHL 23DHL 22DHL 21DHL 20DHL 19DHL 18DHL 17DHL
47 32DHL 31DHL 30DHL 29DHL 28DHL 27DHL 26DHL 25DHL
48 40HDL 39DHL 38DHL 37DHL 36DHL 35DHL 34DHL 33DHL
49 8BDHL 7BDHL 6BDHL 5BDHL 4BDHL 3BDHL 2BDHL 1BDHL
4A 16BDHL 15BDHL 14BDHL 13BDHL 12BDHL 11BDHL 10BDHL 9BDHL
4B 24BDHL 23BDHL 22BDHL 21BDHL 20BDHL 19BDHL 18BDHL 17BDHL
4C 32BDHL 31BDHL 30BDHL 29BDHL 28BDHL 27BDHL 26BDHL 25BDHL
4D 40BDHL 39BDHL 38BDHL 37BDHL 36BDHL 35BDHL 34BDHL 33BDHL
▶ Handicap Up Hall Call Lamp
FLOOR Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
4E 8EUHL 7EUHL 6EUHL 5EUHL 4EUHL 3EUHL 2EUHL 1EUHL
씳 씳
57 80EUHL 79EUHL 78EUHL 77EUHL 76EUHL 75EUHL 7EUHL 73EUHL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 56 -
▶ Handicap Up Hall Call Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
4E 8EUHL 7EUHL 6EUHL 5EUHL 4EUHL 3EUHL 2EUHL 1EUHL
4F 16EUHL 15EUHL 14EUHL 13EUHL 12EUHL 11EUHL 10EUHL 9EUHL
50 24EUHL 23EUHL 22EUHL 21EUHL 20EUHL 19EUHL 18EUHL 17EUHL
51 32EUHL 31EUHL 30EUHL 29EUHL 28EUHL 27EUHL 26EUHL 25EUHL
52 40EUHL 39EUHL 38EUHL 37EUHL 36EUHL 35EUHL 34EUHL 33EUHL
53 8BEUHL 7BEUHL 6BEUHL 5BEUHL 4BEUHL 3BEUHL 2BEUHL 1BEUHL
54 16BEUHL 15BEUHL 14BEUHL 13BEUHL 12BEUHL 11BEUHL 10BEUHL 9BEUHL
55 24BEUHL 23BEUHL 22BEUHL 21BEUHL 20BEUHL 19BEUHL 18BEUHL 17BEUHL
56 32BEUHL 31BEUHL 30BEUHL 29BEUHL 28BEUHL 27BEUHL 26BEUHL 25BEUHL
57 40BEUHL 39BEUHL 38BEUHL 37BEUHL 36BEUHL 35BEUHL 34BEUHL 33BEUHL
▶ Handicap Down Hall Call Lamp
FLOOR Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
58 8EDHL 7EDHL 6EDHL 5EDHL 4EDHL 3EDHL 2EDHL 1EDHL
씳 씳
61 80EDHL 79EDHL 78EDHL 77EDHL 76EDHL 75EDHL 74EDHL 73EDHL
▶ Handicap Down Hall Call Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
58 8EDHL 7EDHL 6EDHL 5EDHL 4EDHL 3EDHL 2EDHL 1EDHL
씳 씳
5C 40EDHL 39EDHL 38EDHL 37EDHL 36EDHL 35EDHL 34EDHL 33EDHL
5D 8BEDHL 7BEDHL 6BEDHL 5BEDHL 4BEDHL 3BEDHL 2BEDHL 1BEDHL
씳 씳
61 40BEDHL 39BEDHL 38BEDHL 37BEDHL 36BEDHL 35BEDHL 34BEDHL 33BEDHL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 57 -
5.2 Input and Output signal
▶ Hall Digital
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
62 IND PAK AUT LUP LDN 2Q 2R
63 2H 2G 2F 2E 2D 2C 2B 2A
64 1H 1G 1F 1E 1D 1C 1B 1A
65
66
67
▶ Up Hall Lantern
FLOOR Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
68 8ULNT 7ULNT 6ULNT 5ULNT 4ULNT 3ULNT 2ULNT 1ULNT
씳 씳
71 80ULNT 79ULNT 78ULNT 77ULNT 76ULNT 75ULNT 74ULNT 73ULNT
▶ Up Hall Lantern
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
68 8ULNT 7ULNT 6ULNT 5ULNT 4ULNT 3ULNT 2ULNT 1ULNT
씳 씳
6C 40ULNT 39ULNT 38ULNT 37ULNT 36ULNT 35ULNT 34ULNT 33ULNT
6D 8BULNT 7BULNT 6BULNT 5BULNT 4BULNT 3BULNT 2BULNT 1BULNT
씳 씳
71 40BULNT 39BULNT 38BULNT 37BULNT 36BULNT 35BULNT 34BULNT 33BULNT
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 58 -
▶ Down Hall Lantern
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
72 8DLNT 7DLNT 6DLNT 5DLNT 4DLNT 3DLNT 2DLNT 1DLNT
씳 씳
7B 80DLNT 79DLNT 78DLNT 77DLNT 76DLNT 75DLNT 74DLNT 73DLNT
▶ Down Hall Lantern
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
72 8DLNT 7DLNT 6DLNT 5DLNT 4DLNT 3DLNT 2DLNT 1DLNT
씳 씳
76 40DLNT 39DLNT 38DLNT 37DLNT 36DLNT 35DLNT 34DLNT 33DLNT
77 8BDLNT 7BDLNT 6BDLNT 5BDLNT 4BDLNT 3BDLNT 2BDLNT 1BDLNT
씳 씳
7B 40BDLNT 39BDLNT 38BDLNT 37BDLNT 36BDLNT 35BDLNT 34BDLNT 33BDLNT
▶ Up Hall Chime
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
7C 8UHCHM 7UHCHM 6UHCHM 5UHCHM 4UHCHM 3UHCHM 2UHCHM 1UHCHM
씳 씳
85 80UHCHM 79UHCHM 78UHCHM 77UHCHM 76UHCHM 75UHCHM 74UHCHM 73UHCHM
▶ Down Hall Chime
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
86 8DHCHM 7DHCHM 6DHCHM 5DHCHM 4DHCHM 3DHCHM 2DHCHM 1DHCHM
씳 씳
8F 80DHCHM 79DHCHM 78DHCHM 77DHCHM 76DHCHM 75DHCHM 74DHCHM 73DHCHM
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 59 -
▶ Up Hall Chime
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
7C 8UHCHM 7UHCHM 6UHCHM 5UHCHM 4UHCHM 3UHCHM 2UHCHM 1UHCHM
씳 씳
80 40UHCHM 39UHCHM 38UHCHM 37UHCHM 36UHCHM 35UHCHM 34UHCHM 33UHCHM
81 8BUHCHM 7BUHCHM 6BUHCHM 5BUHCHM 4BUHCHM 3BUHCHM 2BUHCHM 1BUHCHM
씳 씳
85 40BUHCHM 39BUHCHM 38BUHCHM 37BUHCHM 36BUHCHM 35BUHCHM 34BUHCHM 33BUHCHM
▶ Down Hall Chime
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
86 8DHCHM 7DHCHM 6DHCHM 5DHCHM 4DHCHM 3DHCHM 2DHCHM 1DHCHM
씳 씳
8A 40DHCHM 39DHCHM 38DHCHM 37DHCHM 36DHCHM 35DHCHM 34DHCHM 33DHCHM
8B 8BDHCHM 7BDHCHM 6BDHCHM 5BDHCHM 4BDHCHM 3BDHCHM 2BDHCHM 1BDHCHM
씳 씳
8F 40BDHCHM 39BDHCHM 38BDHCHM 37BDHCHM 36BDHCHM 35BDHCHM 34BDHCHM 33BDHCHM
▶ Hall Status Lamp
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
90 LAMP3 LAMP2 LAMP1 LUP LDN
▶ Normal Car Call Entry Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
E9 8ENTBL 7ENTBL 6ENTBL 5ENTBL 4ENTBL 3ENTBL 2ENTBL 1ENTBL
씳 씳
F2 80ENTBL 79ENTBL 78ENTBL 77ENTBL 76ENTBL 75ENTBL 74ENTBL 73ENTBL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 60 -
▶ Normal Car Call Entry Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
EA 8ENTBL 7ENTBL 6ENTBL 5ENTBL 4ENTBL 3ENTBL 2ENTBL 1ENTBL
씳 씳
EE 40ENTBL 39ENTBL 38ENTBL 37ENTBL 36ENTBL 35ENTBL 34ENTBL 33ENTBL
EF 8BENTBL 7BENTBL 6BENTBL 5BENTBL 4BENTBL 3BENTBL 2BENTBL 1BENTBL
씳 씳
F2 40BENTBL 39BENTBL 38BENTBL 37BENTBL 36BENTBL 35BENTBL 34BENTBL 33BENTBL
▶ Handicap Car Call Entry Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
F3 8EENTBL 7EENTBL 6EENTBL 5EENTBL 4EENTBL 3EENTBL 2EENTBL 1EENTBL
씳 씳
FC 80EENTBL 79EENTBL 78EENTBL 77EENTBL 76EENTBL 75EENTBL 74EENTBL 73EENTBL
▶ Handicap Car Call Entry Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
F3 8ENTBL 7ENTBL 6ENTBL 5ENTBL 4ENTBL 3ENTBL 2ENTBL 1ENTBL
씳 씳
F7 40ENTBL 39ENTBL 38ENTBL 37ENTBL 36ENTBL 35ENTBL 34ENTBL 33ENTBL
F8 8EENTBL 7EENTBL 6EENTBL 5EENTBL 4EENTBL 3EENTBL 2EENTBL 1EENTBL
씳 씳
FC 40EENTBL 39EENTBL 38EENTBL 37EENTBL 36EENTBL 35EENTBL 34EENTBL 33EENTBL
▶ Normal Car Call Inhibition Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
98 8ITBL 7ITBL 6ITBL 5ITBL 4ITBL 3ITBL 2ITBL 1ITBL
씳 씳
A1 80ITBL 79ITBL 78ITBL 77ITBL 76ITBL 75ITBL 74ITBL 73ITBL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 61 -
▶ Normal Car Call Inhibition Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
98 8ITBL 7ITBL 6ITBL 5ITBL 4ITBL 3ITBL 2ITBL 1ITBL
씳 씳
9C 40ITBL 39ITBL 38ITBL 37ITBL 36ITBL 35ITBL 34ITBL 33ITBL
9D 8BITBL 7BITBL 6BITBL 5BITBL 4BITBL 3BITBL 2BITBL 1BITBL
씳 씳
A1 40BITBL 39BITBL 38BITBL 37BITBL 36BITBL 35BITBL 34BITBL 33BITBL
▶ Handicap Car Call Inhibition Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
A2 8EITBL 7EITBL 6EITBL 5EITBL 4EITBL 3EITBL 2EITBL 1EITBL
씳 씳
AB 80EITBL 79EITBL 78EITBL 77EITBL 76EITBL 75EITBL 74EITBL 73EITBL
▶ Handicap Car Call Inhibition Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
A2 8EITBL 7EITBL 6EITBL 5EITBL 4EITBL 3EITBL 2EITBL 1EITBL
씳 씳
A6 40EITBL 39EITBL 38EITBL 37EITBL 36EITBL 35EITBL 34EITBL 33EITBL
A7 8BEITBL 7BEITBL 6BEITBL 5BEITBL 4BEITBL 3BEITBL 2BEITBL 1BEITBL
씳 씳
AB 40BEITBL 39BEITBL 38BEITBL 37BEITBL 36BEITBL 35BEITBL 34BEITBL 33BEITBL
▶ Normal Car Call Cancel Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
AC 8CTBL 7CTBL 6CTBL 5CTBL 4CTBL 3CTBL 2CTBL 1CTBL
씳 씳
B5 80CTBL 79CTBL 78CTBL 77CTBL 76CTBL 75CTBL 74CTBL 73CTBL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 62 -
▶ Normal Car Call Cancel Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
AC 8CTBL 7CTBL 6CTBL 5CTBL 4CTBL 3CTBL 2CTBL 1CTBL
씳 씳
B0 40CTBL 39CTBL 38CTBL 37CTBL 36CTBL 35CTBL 34CTBL 33CTBL
B1 8BCTBL 7BCTBL 6BCTBL 5BCTBL 4BCTBL 3BCTBL 2BCTBL 1BCTBL
씳 씳
B5 40BCTBL 39BCTBL 38BCTBL 37BCTBL 36BCTBL 35BCTBL 34BCTBL 33BCTBL
▶ Handicap Car Call Cancel Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
B6 8ECTBL 7ECTBL 6ECTBL 5ECTBL 4ECTBL 3ECTBL 2ECTBL 1ECTBL
씳 씳
BF 80ECTBL 79ECTBL 78ECTBL 77ECTBL 76ECTBL 75ECTBL 74ECTBL 73ECTBL
▶ Handicap Car Call Cancel Table
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
B6 8ECTBL 7ECTBL 6ECTBL 5ECTBL 4ECTBL 3ECTBL 2ECTBL 1ECTBL
씳 씳
BA 40ECTBL 39ECTBL 38ECTBL 37ECTBL 36ECTBL 35ECTBL 34ECTBL 33ECTBL
BB 8BECTBL 7BECTBL 6BECTBL 5BECTBL 4BECTBL 3BECTBL 2BECTBL 1BECTBL
씳 씳
BF 40BECTBL 39BECTBL 38BECTBL 37BECTBL 36BECTBL 35BECTBL 34BECTBL 33BECTBL
▶ Automatic broadcasting guidance.
ADRSBit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
SLS1 SLS2
C9 A9 landbell - - - SBZ LBZ CHDN CHUP
DE AA ARD VIP DC FD FIR OV DOWN UP
DF AB FLOOR DATA
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 63 -
▶ Digital(KDIGI)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
C0 1H 1G 1F 1E 1D 1C 1B 1A
C1 2H 2G 2F 2E 2D 2C 2B 2A
C2 2Q 2R
C3
C4
C5
▶ Option Flag(OPTF) & Handicap Car Call Clear Data
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
C5 KCBZOP DBLD KCCAN
C7 HANDICAP CAR CALL CLEAR DATA(It is same as KCCLR in CA address)
▶ Lamp(STSL)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
C8 LDN LUP LIND LFIRE LOVER LPAK
▶ Car Call Clear(KCCLR)
ADRS Car Call Clear Option Set/Clear Bit
CA Binary Code(0B ~ 1010000B)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
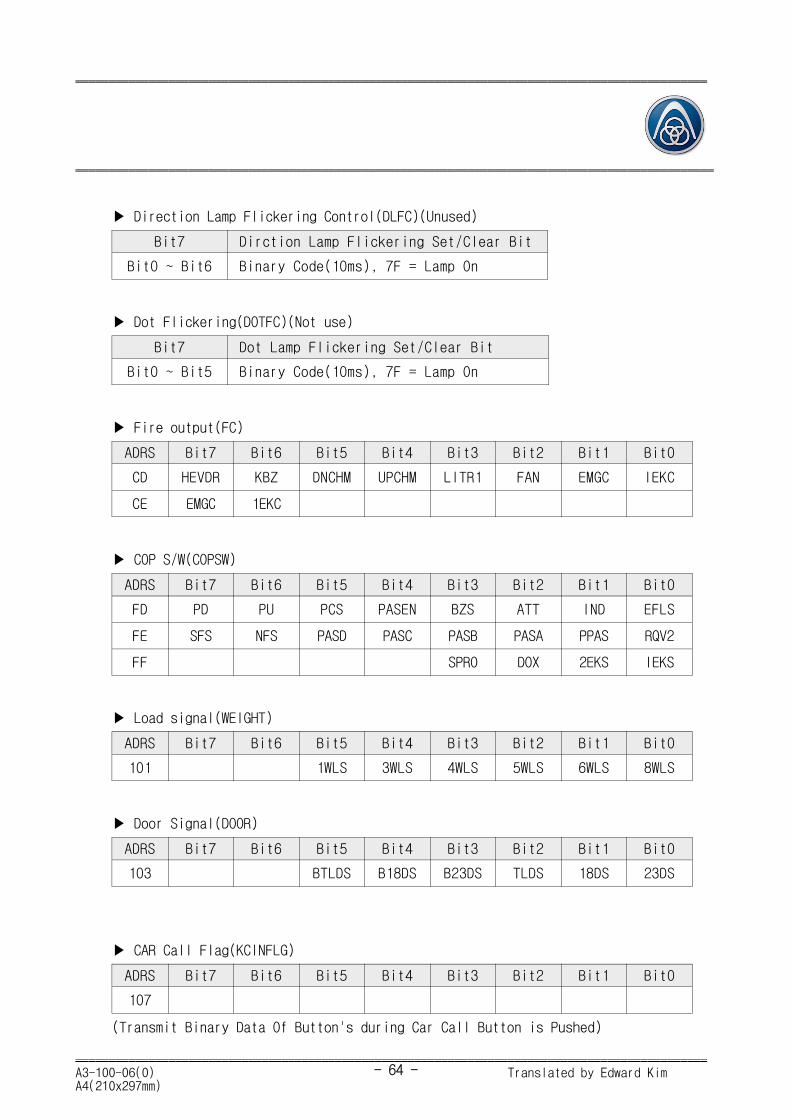
- 64 -
▶ Direction Lamp Flickering Control(DLFC)(Unused)
Bit7 Dirction Lamp Flickering Set/Clear Bit
Bit0 ~ Bit6 Binary Code(10ms), 7F = Lamp On
▶ Dot Flickering(DOTFC)(Not use)
Bit7 Dot Lamp Flickering Set/Clear Bit
Bit0 ~ Bit5 Binary Code(10ms), 7F = Lamp On
▶ Fire output(FC)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
CD HEVDR KBZ DNCHM UPCHM LITR1 FAN EMGC IEKC
CE EMGC 1EKC
▶ COP S/W(COPSW)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
FD PD PU PCS PASEN BZS ATT IND EFLS
FE SFS NFS PASD PASC PASB PASA PPAS RQV2
FF SPRO DOX 2EKS IEKS
▶ Load signal(WEIGHT)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
101 1WLS 3WLS 4WLS 5WLS 6WLS 8WLS
▶ Door Signal(DOOR)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
103 BTLDS B18DS B23DS TLDS 18DS 23DS
▶ CAR Call Flag(KCINFLG)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
107
(Transmit Binary Data Of Button's during Car Call Button is Pushed)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 65 -
▶ Pass S/W(PASW) - Not use
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
104 PASS4 PASS3 PASS2 PASS1
▶ Button Jam(JAMBTN)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
105
▶ Position Indicator(POSIL) : Applied to general case.
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
D4 8POSIL 7POSIL 6POSIL 5POSIL 4POSIL 3POSIL 2POSIL 1POSIL
씳 씳
DD 80POSIL 79POSIL 78POSIL 77POSIL 76POSIL 75POSIL 74POSIL 73POSIL
▶ Digital(KDIGI)
ADRS Bit7 Bit6 Bit5 Bit4 Bit3 Bit2 Bit1 Bit0
D4 8POSIL 7POSIL 6POSIL 5POSIL 4POSIL 3POSIL 2POSIL 1POSIL
씳 씳
D8 40POSIL 39POSIL 38POSIL 37POSIL 36POSIL 35POSIL 34POSIL 33POSIL
D9 8BPOSIL 7BPOSIL 6BPOSIL 5BPOSIL 4BPOSIL 3BPOSIL 2BPOSIL 1BPOSIL
씳 씳
DD 40BPOSIL 39BPOSIL 38BPOSIL 37BPOSIL 36BPOSIL 35BPOSIL 34BPOSIL 33BPOSIL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 66 -
6. DMCU Voltage adjustment
6.1 Zero point adjustment of Current electric sensor.
CHECK-PIN VR-NO Setting Name of Board
IUF VR5 0.001VDMCU
IVF VR6 0.001V
IRF VR20 0.001VCONV
ISF VR23 0.001V
※ Do not use CONVERTER and Inverter.
(DMCU 2F,3F) - Set VR5 and VR6 to 5N. VR15로 Set IUF-COM5D of VR15 to VR16 for
becoming ±0.000V (When it is stopped)
6.2 A Variable resist control
(1) CONV variable resist control
MOTORVPSOC(VR12)
VDCOC(VR13)
VDCX(VR16)
VDTL(VR14)
VDTM(VR15)
VDTH(VR17)
CRL-635-3.37V -5.4V
P-N(100):1V -4.3V -6.5V -7.5VCRL-640
CRL-670 -5.27V -9.0V
(2) IG, VMTOC, VMCC Setting up
Motor capacity IG(VR1) VMTOC(VR2) VMCC(VR3) Sensor Turn IGBT Capacity
5.5KW 7.5V -8.0V -0.282V
50A/4V
2T75A
7.5KW 6.5V -4.0V -0.185V
1T
9.5/11KW 6.8V
-5.6V
-0.376V100A
13/15KW 8.0V -0.247V
18.5KW 6.0V -0.185V100A/4V 200A
22KW 7.5V -0.235V
CRL-635 5.25V-4.31V
-0.36V
100A/1VCRL-640 5.74V -0.45V
CRL-670 8.44V -7.43V -1.05V
6.3 Revival voltage, Low voltage, Overvoltage detection setting value.
Inputvoatag
e
Revivalvoltage
Low voltage Overvoltage
P-N P-N CHK.PIN CHK.V VOL.NO P-N CHK.PIN CHK.V VOL.NO
400V 600V 430VVDTS
4.3VVR3
690VVDTH
7.4VVR2
460V 680V 500V 5.0V 780V 7.8V
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
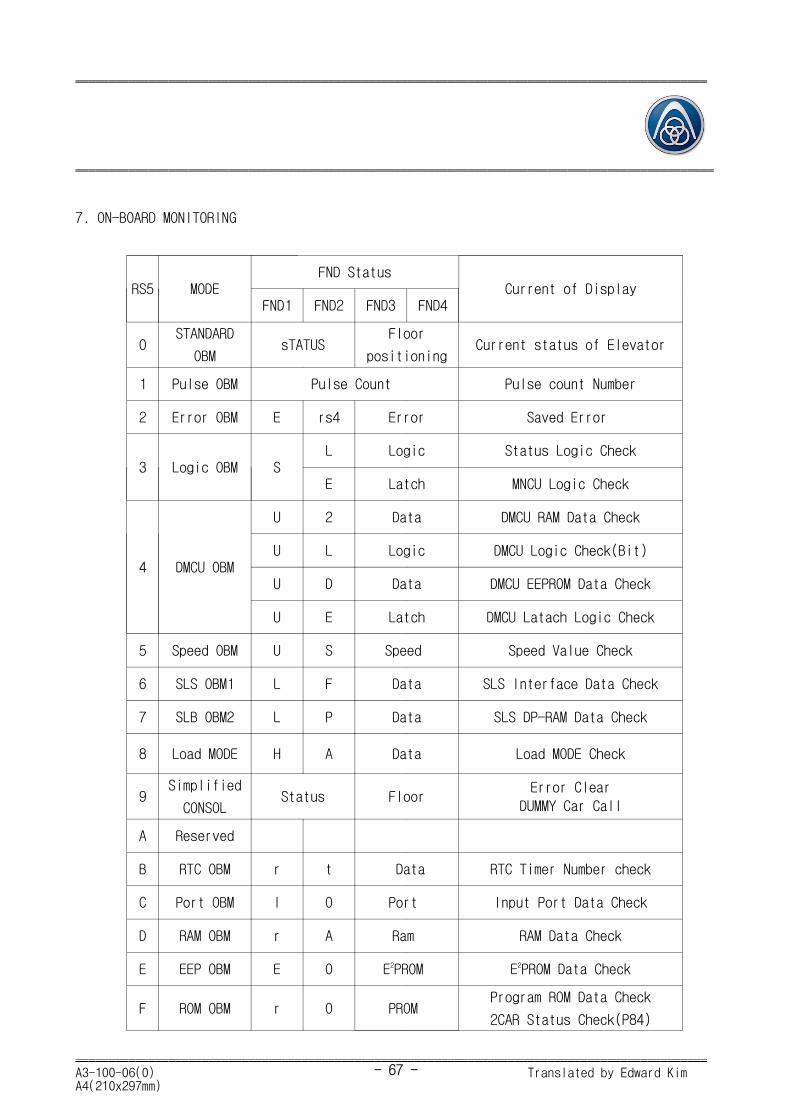
- 67 -
7. ON-BOARD MONITORING
RS5 MODEFND Status
Current of DisplayFND1 FND2 FND3 FND4
0STANDARD
OBMsTATUS
Floor
positioningCurrent status of Elevator
1 Pulse OBM Pulse Count Pulse count Number
2 Error OBM E rs4 Error Saved Error
3 Logic OBM SL Logic Status Logic Check
E Latch MNCU Logic Check
4 DMCU OBM
U 2 Data DMCU RAM Data Check
U L Logic DMCU Logic Check(Bit)
U D Data DMCU EEPROM Data Check
U E Latch DMCU Latach Logic Check
5 Speed OBM U S Speed Speed Value Check
6 SLS OBM1 L F Data SLS Interface Data Check
7 SLB OBM2 L P Data SLS DP-RAM Data Check
8 Load MODE H A Data Load MODE Check
9Simplified
CONSOLStatus Floor
Error Clear
DUMMY Car Call
A Reserved
B RTC OBM r t Data RTC Timer Number check
C Port OBM I O Port Input Port Data Check
D RAM OBM r A Ram RAM Data Check
E EEP OBM E O E2PROM E2PROM Data Check
F ROM OBM r O PROMProgram ROM Data Check
2CAR Status Check(P84)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 68 -
8. DISPLAY LIST
8.1 MNCU DISPLAY LIST
RS12345LED18 LED17 LED16 LED15 LED14 LED13 LED12 LED11
LED8 LED7 LED6 LED5 LED4 LED3 LED2 LED1
0S103
(LOGIC)
XCC BDT BKAT BKT BKA BKAH C18I 18CS
CC DA DC DCLT DCT2 DCT D DT
0S113
(LOGIC)
DTX DX DZIN INS LD LDT LDX LDY
LERR LS1 3LS 4LS LSER LSMC LU LUT
0S123
(LOGIC)
LUX LUY LZIH LZN NOR NVT PDN PDT
PDX PLD PLU PC1 PSLD PUP PUT PUX
0S133
(LOGIC)
RCL1 SCC SDRL SDRM SMA SMB SMC SMD
SME SM SMSI SMW SRST STD1 STD2 SXA
0S143
(LOGIC)
SXB SXC SXD SXE UA UDTL UDXL U
UX WDTMC XCCT XDX XINS XNVT XSTD XUX
0S153
(LOGIC)
YINS ZSR {REVIH} {WSE} {WSD} {WSU} {UAWS} {DAWS}
{18SX} - - - - - - -
0S163
(INPUT)
BDCCI DCCI BDCX DCX X8 FHDC HDC X4
6LS 5LS 4LS 3LS - PC1 PC2 XCC
0S173
(INPUT)
LU LD LS1 KINS KNOR KUP KDN BKA
LDS BLDS KBDO KDO KBDC KDC BDLS DLS
0S183
(INPUT)
- - PFALT spr ARD PARK FIRE RTH
BPDC PDC PUP PDN PLU PLD PINS PNOR
0S193
(INPUT)
BPDO CTRL ALT BOTS TOPS MNTNC FDSC PDO
{RSQ1} - - {CBS} {FMR} {APAK} {BKAH} {RCC}
0S1A3
(OUTPUT)
- - WSE INS NOR PSLD DA UA
- - TDPRY TAMC2 R2ES BDT DT SMR
0S1B3
(OUTPUT)
- - - {DOD} - {ERS} {RCK} {RC}
- - - - - - - -
0S1C3
(INPUT)
{EDH} {EDM} {EDL} {1WLS} {23DS} {18DS} {LDS} {RSQ2}
- - - - - - - {RQ4}
* Combined signal of { } is applied to more than Master Rom Rev5.0.
* In case of printed "S" in RS2 is displayed current status in 0 or displayed
latch status in 1.
* LED1∼LED8 : FND4, LED11∼LED18 : FND3
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 69 -
SYMBOL Signal descriptionRS12345 Setting Indicate locationCurrent LATCH FND DIGIT
18CS DOOR FULL OPEN SIGNAL 00103 01103 3 1
3LS Downward Journey zone vertical S/W Signal 00113 01113 4 6
4LS Upward Journey zone vertical S/W Signal 00113 01113 4 5
5LS Downward absolute location detective S/W signal 00163 01163 4 7
6LS Upward absolute location detective S/W signal 00163 01163 4 8
ALT Functional conversion of PCB S/W Signal 00193 01193 3 6
ARD ARD Power input signal 00183 01183 3 4
BDCCI A Back gate controller power check signal 00163 01163 3 8
BDCX A Back gate closing check signal 00163 01163 3 6
BDLS A back gate SAFETY SHOE signal 00173 01173 4 2
BDT A back gate OPEN command signal 001A3 011A3 4 3
BKA BREAK Opening check signal(NC) 00103 01103 3 4
BKAH BREAK opening check signal(PC1) 00103 01103 3 3
BKAT BREAK closing delay signal 00103 01103 3 6
BKT BREAK opening delay signal 00103 01103 3 5
BOTS BOT floor car call S/W on PCB 00193 01193 3 5
BPDC A back door S/W closing signal on PCB 00183 01183 4 8
BPDO A back door S/W opening signal on PCB 00193 01193 3 8
C18I 18CS check prohibit signal 00109 01109 3 2
CC CC power confirm check signal 00103 01103 4 8
CTRL ALTS S/W OFF signal on PCB 00193 01193 3 7
D SOFT DOWN Command signal 00103 01103 4 2
DA DOWN Operation command signal 00103 01103 4 7
DC Closing door check signal 00103 01103 4 6
DCCI DOOR controller power check signal 00163 01163 3 7
DCLT Closing LOGIC signal in operation 00103 01103 4 5
DCT Closing door check delay LOGIC signal 00103 01103 4 3
DCT2 Closing check blinking logic signal 00103 01103 4 4
DCX Closing check signal 00163 01163 3 5
DLS DOOR SAFETY SHOE signal 00173 01173 4 1
DT Closing command signal 00103 01103 4 1
DTX Closing complex LOGIC signal 00113 01113 3 8
DX Downward LOGIC signal in operation 00113 01113 3 7
DZIN DOOR ZONE LOGIC signal 00113 01113 3 6
FDSC ON BOARD FDS CUT S/W signal 00193 01193 3 2
FHDC Front HALL DOOR closing check signal 00163 01163 3 3
FIRE Fire and emergency operation input signal 00183 01183 3 2
HDC HALL DOOR closing check signal 00163 01163 3 2
INS Inspection operation LOGIC signal 00113 01113 3 5
KBDC Back door closing S/W signal of Cage 00173 01173 4 4
KBDO Back door opening S/W signal of Cage 00173 01173 4 6
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
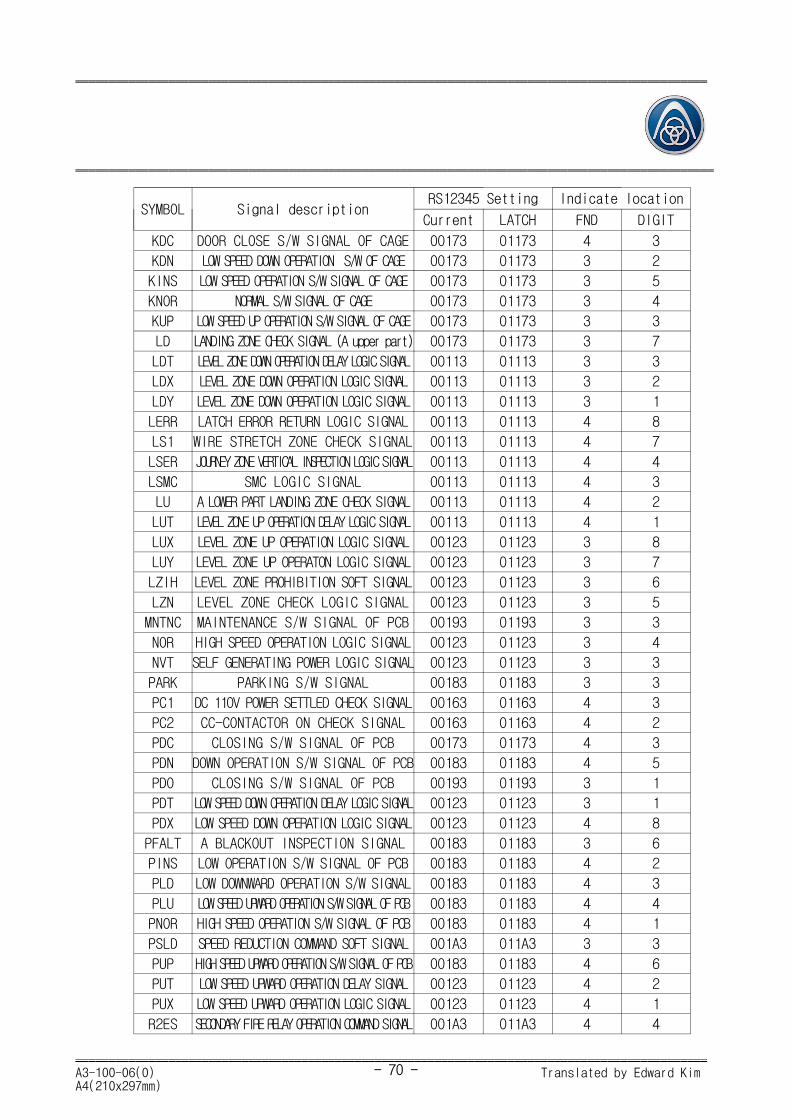
- 70 -
SYMBOL Signal descriptionRS12345 Setting Indicate location
Current LATCH FND DIGIT
KDC DOOR CLOSE S/W SIGNAL OF CAGE 00173 01173 4 3
KDN LOW SPEED DOWN OPERATION S/W OF CAGE 00173 01173 3 2
KINS LOW SPEED OPERATION S/W SIGNAL OF CAGE 00173 01173 3 5
KNOR NORMAL S/W SIGNAL OF CAGE 00173 01173 3 4
KUP LOW SPEED UP OPERATION S/W SIGNAL OF CAGE 00173 01173 3 3
LD LANDING ZONE CHECK SIGNAL (A upper part) 00173 01173 3 7
LDT LEVEL ZONE DOWN OPERATION DELAY LOGIC SIGNAL 00113 01113 3 3
LDX LEVEL ZONE DOWN OPERATION LOGIC SIGNAL 00113 01113 3 2
LDY LEVEL ZONE DOWN OPERATION LOGIC SIGNAL 00113 01113 3 1
LERR LATCH ERROR RETURN LOGIC SIGNAL 00113 01113 4 8
LS1 WIRE STRETCH ZONE CHECK SIGNAL 00113 01113 4 7
LSER JOURNEY ZONE VERTICAL INSPECTION LOGIC SIGNAL 00113 01113 4 4
LSMC SMC LOGIC SIGNAL 00113 01113 4 3
LU A LOWER PART LANDING ZONE CHECK SIGNAL 00113 01113 4 2
LUT LEVEL ZONE UP OPERATION DELAY LOGIC SIGNAL 00113 01113 4 1
LUX LEVEL ZONE UP OPERATION LOGIC SIGNAL 00123 01123 3 8
LUY LEVEL ZONE UP OPERATON LOGIC SIGNAL 00123 01123 3 7
LZIH LEVEL ZONE PROHIBITION SOFT SIGNAL 00123 01123 3 6
LZN LEVEL ZONE CHECK LOGIC SIGNAL 00123 01123 3 5
MNTNC MAINTENANCE S/W SIGNAL OF PCB 00193 01193 3 3
NOR HIGH SPEED OPERATION LOGIC SIGNAL 00123 01123 3 4
NVT SELF GENERATING POWER LOGIC SIGNAL 00123 01123 3 3
PARK PARKING S/W SIGNAL 00183 01183 3 3
PC1 DC 110V POWER SETTLED CHECK SIGNAL 00163 01163 4 3
PC2 CC-CONTACTOR ON CHECK SIGNAL 00163 01163 4 2
PDC CLOSING S/W SIGNAL OF PCB 00173 01173 4 3
PDN DOWN OPERATION S/W SIGNAL OF PCB 00183 01183 4 5
PDO CLOSING S/W SIGNAL OF PCB 00193 01193 3 1
PDT LOW SPEED DOWN OPERATION DELAY LOGIC SIGNAL 00123 01123 3 1
PDX LOW SPEED DOWN OPERATION LOGIC SIGNAL 00123 01123 4 8
PFALT A BLACKOUT INSPECTION SIGNAL 00183 01183 3 6
PINS LOW OPERATION S/W SIGNAL OF PCB 00183 01183 4 2
PLD LOW DOWNWARD OPERATION S/W SIGNAL 00183 01183 4 3
PLU LOW SPEED UPWARD OPERATION S/W SIGNAL OF PCB 00183 01183 4 4
PNOR HIGH SPEED OPERATION S/W SIGNAL OF PCB 00183 01183 4 1
PSLD SPEED REDUCTION COMMAND SOFT SIGNAL 001A3 011A3 3 3
PUP HIGH SPEED UPWARD OPERATION S/W SIGNAL OF PCB 00183 01183 4 6
PUT LOW SPEED UPWARD OPERATION DELAY SIGNAL 00123 01123 4 2
PUX LOW SPEED UPWARD OPERATION LOGIC SIGNAL 00123 01123 4 1
R2ES SECONDARY FIRE RELAY OPERATION COMMAND SIGNAL 001A3 011A3 4 4
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 71 -
SYMBOL SIGNAL DESCRIPTION RS12345 SETTING INDICATE LOCATIONCURRENT LATCH FND DIGIT
RCL1 ERROR RESTART SOFT SIGNAL 00133 01133 3 8
RTH MACHINE ROOM TEMPERATURE ERROR SIGNAL 00183 01183 3 1
SCC CC CUT SOFT SIGNAL 00133 01133 3 7
SDRL LOW SPEED OPERATION CHECK SIGNAL 00133 01133 3 6
SDRM MIDDLE SPEED OPERATION CHECK SIGNAL 00133 01133 3 5
SM SMR ON COMMAND SIGNAL 00133 01133 4 7
SMA SMA LOGIC SIGNAL 00133 01133 3 4
SMB SMB LOGIC SIGNAL 00133 01133 3 3
SMC SMC LOGIC SIGNAL 00133 01133 3 2
SMD SMD LOGIC SIGNAL 00133 01133 3 1
SME SME LOGIC SIGNAL 00133 01133 4 8
SMR SMR RELAY ON OUTPUT SIGNAL 001A3 011A3 4 1
SMSI SM ON PROHIBITION SOFT SIGNAL 00133 01133 4 6
SMW SMW LOGIC SIGNAL 00133 01133 4 5
SRST SM RESTART SOFT SIGNAL 00133 01133 4 4
STD1 START ERROR LOGIC SIGNAL 001333 01133 4 3
STD2 STOP ERROR LOGIC SIGNAL 00133 01133 4 2
SXA SMA OFF SOFT SIGNAL 00133 01133 4 1
SXB SMB OFF SOFT SIGNAL 00143 01143 3 8
SXC SMC OFF SOFT SIGNAL 00143 01143 3 7
SXD SMD OFF SOFT SIGNAL 00143 01143 3 6
SXE SME OFF SOFT SIGNAL 00143 01143 3 5
TOPS CAR CALL S/W ON THE TOP FLOOR OF PCB 00193 01193 3 4
U UP OPERATION SOFT SIGNAL 00143 01143 3 1
UA UP OPERATION COMMAND SIGNAL 00143 01143 3 4
UDTL UP/DN OPERATION COMMAND DELAY SIGNAL 00143 01143 3 3
UDXL UP/DN OPERATION LOGIC SIGNAL 00143 01143 3 2
WDTMC DMCU WDT SIGNAL 00143 01143 4 7
WSE WIRE STRETCH COMMAND SOFT SIGNAL 001A3 011A3 3 6
X4 SHAFT SAFETY LINE CHECK SIGNAL 00163 01163 3 1
X8 CAGE SAFETY LINE CHECK SIGNAL 00163 01163 3 4
XCC SAFETY LINE CHECK SIGANL 00163 01163 4 1
XCCT SAFETY LINE CHECK DELAY SIGNAL 00143 01143 4 6
XDX DOWN START SIGNAL 00143 01143 4 5
XINS LOW SPEED OPERATION SOFT SIGNAL 00143 01143 4 4
XNVT Power delay signal 00143 01143 4 3
XSTD Middle SPEED OPERATION MAINTENANCE SIGNAL 00143 01143 4 2
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
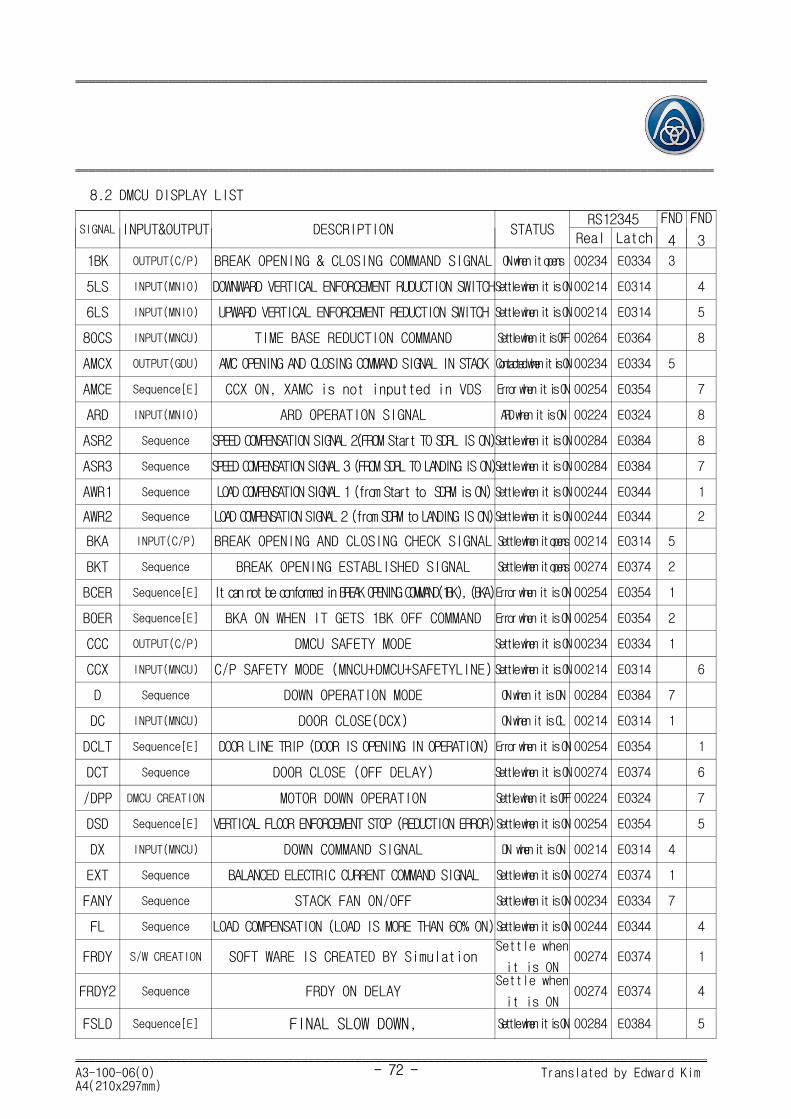
- 72 -
8.2 DMCU DISPLAY LIST
SIGNAL INPUT&OUTPUT DESCRIPTION STATUSRS12345 FND
4
FND
3Real Latch
1BK OUTPUT(C/P) BREAK OPENING & CLOSING COMMAND SIGNAL ONwhenitopens 00234 E0334 3
5LS INPUT(MNIO) DOWNWARD VERTICAL ENFORCEMENT RUDUCTION SWITCHSettlewhenitisON00214 E0314 4
6LS INPUT(MNIO) UPWARD VERTICAL ENFORCEMENT REDUCTION SWITCH SettlewhenitisON00214 E0314 5
80CS INPUT(MNCU) TIME BASE REDUCTION COMMAND SettlewhenitisOFF 00264 E0364 8
AMCX OUTPUT(GDU) AMC OPENING AND CLOSING COMMAND SIGNAL IN STACK ContactedwhenitisON00234 E0334 5
AMCE Sequence[E] CCX ON, XAMC is not inputted in VDS ErrorwhenitisON 00254 E0354 7
ARD INPUT(MNIO) ARD OPERATION SIGNAL ARDwhenitisON 00224 E0324 8
ASR2 Sequence SPEED COMPENSATION SIGNAL 2(FROM Start TO SDRL IS ON)SettlewhenitisON00284 E0384 8
ASR3 Sequence SPEED COMPENSATION SIGNAL 3 (FROM SDRL TO LANDING IS ON)SettlewhenitisON00284 E0384 7
AWR1 Sequence LOAD COMPENSATION SIGNAL 1 (from Start to SDRM is ON) SettlewhenitisON00244 E0344 1
AWR2 Sequence LOAD COMPENSATION SIGNAL 2 (from SDRM to LANDING IS ON)SettlewhenitisON00244 E0344 2
BKA INPUT(C/P) BREAK OPENING AND CLOSING CHECK SIGNAL Settlewhenitopens 00214 E0314 5
BKT Sequence BREAK OPENING ESTABLISHED SIGNAL Settlewhenitopens 00274 E0374 2
BCER Sequence[E] ItcannotbeconformedinBREAKOPENINGCOMMAND(1BK),(BKA)ErrorwhenitisON 00254 E0354 1
BOER Sequence[E] BKA ON WHEN IT GETS 1BK OFF COMMAND ErrorwhenitisON 00254 E0354 2
CCC OUTPUT(C/P) DMCU SAFETY MODE SettlewhenitisON00234 E0334 1
CCX INPUT(MNCU) C/P SAFETY MODE (MNCU+DMCU+SAFETYLINE) SettlewhenitisON00214 E0314 6
D Sequence DOWN OPERATION MODE ONwhenitisDN 00284 E0384 7
DC INPUT(MNCU) DOOR CLOSE(DCX) ONwhenitisCL 00214 E0314 1
DCLT Sequence[E] DOOR LINE TRIP (DOOR IS OPENING IN OPERATION) ErrorwhenitisON 00254 E0354 1
DCT Sequence DOOR CLOSE (OFF DELAY) SettlewhenitisON00274 E0374 6
/DPP DMCU CREATION MOTOR DOWN OPERATION SettlewhenitisOFF 00224 E0324 7
DSD Sequence[E] VERTICAL FLOOR ENFORCEMENT STOP (REDUCTION ERROR)SettlewhenitisON 00254 E0354 5
DX INPUT(MNCU) DOWN COMMAND SIGNAL DN whenitisON 00214 E0314 4
EXT Sequence BALANCED ELECTRIC CURRENT COMMAND SIGNAL SettlewhenitisON 00274 E0374 1
FANY Sequence STACK FAN ON/OFF SettlewhenitisON 00234 E0334 7
FL Sequence LOAD COMPENSATION (LOAD IS MORE THAN 60% ON)SettlewhenitisON 00244 E0344 4
FRDY S/W CREATION SOFT WARE IS CREATED BY SimulationSettle when
it is ON00274 E0374 1
FRDY2 Sequence FRDY ON DELAYSettle when
it is ON00274 E0374 4
FSLD Sequence[E] FINAL SLOW DOWN, SettlewhenitisON 00284 E0384 5
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 73 -
SIGNAL INPUT&OUTPUT DESCRIPTION STARUSRS12345 FND
4
FND
3Real Latch
FSLF INPUT(MNCU) RESCUE PATTERN(HLP,LLP)OPERATION Flag SettlewhenitisON00264 E0364 7
HSMA Sequence[E] HARD SMA(Related BREAK : BOER+BCER) ErrorwhenitisOFF00244 E0344 3
HSMB Sequence[E] HARD SMB(Temperature sensor movement : STH+MTH)ErrorwhenitisOFF00244 E0344 4
HSMC Sequence[E] HARD SMC(Related operation : STD1,2+INSER+DCLT)ErrorwhenitisOFF00244 E0344 5
HSMD Sequence[E] HARD SMD(Related inverter:VDSE+AMCE+XAMCE+DSD+OSL+OV+MTOC)ErrorwhenitisOFF00244 E0344 6
INS 입력(MNCU) Inspection Operate MODE SettlewhenitisON00224 E0324 8
INSER Sequence[E] INS and NOR are lack of signal errorwhenitisON 00254 E0354 5
LD 입력(MNIO) DOOR ZONE SIGNAL UP ZonewhenitisOFF 00214 E0314 8
LNDE Sequence LANDING APPROVAL SIGNAL SettlewhenitisON00284 E0384 4
LNDZ Sequence LANDING APPROVAL SIGNAL ZONE SettlewhenitisON00284 E0384 6
LS1 INPUT(MNIO) LANDING ZONE SIGNAL(100mm) ZonewhenitisOFF 00214 E0384 6
LS2 Sequence /(LU or LD) DOOR ZONE ZonewhenitisON 00284 E0384 1
LSS1 INPUT(MNCU) RESQUE OPER. FLAG SettlewhenitisON00264 E0364 5
LSS2 INPUT(MNCU) EMERGENCY OPER. FLAG SettlewhenitisON00264 E0364 6
LU INPUT(MNIO) DOOR ZONE SIGNAL DOWN ZonewhenitisOFF 00214 E0314 7
LUD Sequence SETTING OUT OF DOOR ZONE OutofZonewhenitisON00284 E0384 6
LZIH Sequence LEVEL ZONE PROHIBIT START SettlewhenitisON00274 E0374 8
LZNX Sequence LANDING PREPARATION SIGNAL SettlewhenitisON00284 E0384 3
MCC INPUT(SENSOR) BALANCED ELECTRIC CURRENT SIGNAL SettlewhenitisON00224 E0324 4
MCCD S/W CREATION IT IS CREATED BY MCC SIGNAL SettlewhenitisON00284 E0384 2
MCLCK Sequence[E] MCCISNOTDETECTEDINSPITEOFBALANCEDELECTRICCURRENTCOMMAND(EXT).errorwhenitisON 00264 E0364 3
MFD Sequence[E] SPEED GAP IS OVERED MORE THAN GUIDANCE.errorwhenitisON 00264 E0364 4
MMSTY Sequence MOTOR OPERATING PREPARATION SIGNAL SettlewhenitisON00234 E0334 2
MSBCK [E] 8741 MOVEMENT ERROR IN DMCU errorwhenitisON 00264 E0364 2
MST Sequence MOTOR OPERATING PREPARATION SIGNAL settlewhenitisON00274 E0374 8
MTH INPUT(GDU) MOTOR OVERHEATED INSPECTION errorwhenitisOFF00214 E0314 2
MTOC 00224 E0324 1
NL Sequence LESS THAN 40% INSPECTION SIGNAL SettlewhenitisON00244 E0344 3
NOR INPUT(MNCU) 00214 E0314 7
NUD Sequence NO UP DOWN IN INS SettlewhenitisON00274 E0374 7
OSL Sequence[E] OVER SLIP(LOAD COMPENSATION ERROR OCCURS) errorwhenitisON 00254 E0354 4
OV INPUT(GDU) STACK OVER VOLTAGE, ARM SHORT SettlewhenitisON00224 E0324 3
PSF INPUT(C/P) INSPECTION OF BLACKOUT OR LOW VOLTAGESettle when
it is ON00224 E0324 5
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 74 -
SIGNAL INPUT&OUTPUT DESCRIPTION STATUS RS12345 FND
4
FND
3Real Latch
PSFCK Sequence[E] POWER SUPPLY FAULT CHECK(3 WAY,ERROR IN +15V DROP) errorwhenitisON 00264 E0364 1
PSLD INPUT(MNCU) DISTANCE BASE REDUCTION SIGNAL ReductionspeedwhenitisOFF00214 E0314 2
RBE Sequence START TORQUE BOOSTER ENABLE SettlewhenitisON 00274 E0374 2
RBX Sequence TORQUE BOOSTER COMMAND SIGNAL SettlewhenitisON 00274 E0374 6
RLV Sequence RELEVEL COMMAND SIGNAL SettlewhenitisON 00274 E0374 7
SD1 INPUT(HOISTWAY) 90M/MIN OVER SPEED INSPECTION SettlewhenitisON 00224 E0324 1
SD3 INPUT(HOISTWAY) 120M/MIN OVER SPEED INSPECTION SettlewhenitisON 00224 E0324 2
SD5 INPUT(HOISTWAY) 150M/MIN OVER SPEED INSPECTION SettlewhenitisON 00224 E0324 3
SDRL S/W CREATION LOW SPEED INSPECTION SettlewhenitisON 00284 E0384 3
SDRM S/W CREATION MIDDLE SPEED INSPECTION SettlewhenitisON 00284 E0384 4
SDRH S/W CREATION HIGH SPEED INSPECTION SettlewhenitisON 00284 E0384 5
/SDRDY1 INPUT (DMCU) 4MS CLOCK(256HZ) 00214 E0314 8
SMTINV Sequence[E] SOFT INVERTER ACTIVATE COMMAND SettlewhenitisON 00234 E0334 3
SPE Sequence[E] SPEED ENABLE(SPEED COMMAND) SettlewhenitisON 00274 E0374 3
SSMC Sequence[E] SOFT SMC ERROR(PSFCK+MSBCK+MCLCK) ErrorwhenitisOFF
/SSMC INVERT SIGNAL OF SSMC 00234 E0334 1
SSMD Sequence[E] SOFT SMD ERROR(MFD+VDSCK) ErrorwhenitisOFF
/SSMD SSMD의 INVERT SIGNAL 00234 E0334 2
STD1 Sequence[E]ACCELERATION ERROR (SDRL SET IS NOT AVAILABLE
EVEN THOUGH ACCELERATING AFTER 8 SEC)ErrorwhenitisON 00254 E0354 3
STD2 INPUT(MNIO) REDUCTIONERROR(ITISNOTSTOPPEDWITHIN4SECAFTERSDRLSETTING) ErrorwhenitisON 00254 E0354 2
STH INPUT(GDU) STACK OVERHEATED INSPECTION ErrorwhenitisOFF 00214 E0314 1
/TEST DMCU JIG TEST SIGNAL BY JM1 NormalwhenitisON 00224 E0324 2
TH Sequence STH or MTH IS SET, WHEN IT IS STOPPED ERROR SET errorwhenitisON 00254 E0354 3
U Sequence UP COMMAND SettlewhenitisON 00284 E0384 8
UCHK S/W CREATION MAIN PROGRAM MOVEMENT CHECK 00234 E0334 4
UDX Sequence UP or DOWN SettlewhenitisON 00274 E0374 3
/UPP DMCU CREATION MOTOR UP MOVEMENT SIGNAL SettlewhenitisOFF 00224 E0324 6
UX INPUT(MNCU) UP COMMAND SIGNAL(INPUT FROM MNCU) SettlewhenitisON 00214 E0314 3
VDS INPUT(GDU) INSPECTIONOFVOLTAGEWHICHISMORETHAN430VBETWEENSTACKP-N SettlewhenitisON 00224 E0324 6
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 75 -
9. ERROR CODE TABLE
CODE Content or Cause Data 3-9
01
SMASMA TRIP
3=00 LSMA 4=CAR Location floor
01 SSAMI 5,6=CAR Location Pulse
02 XSMA 7-9=Unused
02
SMBSMB TRIP
3=00 LSMB 4=CAR Location floor
01 SSMBI 5,6=CAR Location Pulse
02 XSMB 7-9=Unused
03
SMCSMC TRIP
3=00 LSMC 4=CAR Location floor
01 SSMCI 5,6=CAR Location Pulse
02 XSMC 7-9=Unused
04
SMDSMD TRIP
3=00 LSMD 4=CAR Location floor
01 SSMDI 5,6=CAR Location Pulse
02 XSMD 7-9=Unused
05
SMESME TRIP
3=00 LSME 4=CAR Location floor
01 SSMEI 5,6=CAR Location Pulse
02 XSME 7-9=Unused
06
SMD Relevel Time Out SDM
After tripping, it doesn't
arrive at level in certain time.
SM trip when SMSI is On.
3=EDHSLFL or EDMSLFL
4=Car Location floor
5,6=Car Location Pulse
7-9=Unused
0FOccurred CPU Error or
CPU Interrupt.
2=02 Bus Error 3-9=Unused
03 Address Error
04 Illegal order performance
05 0-Division
06 CHK Order performance
07 TRAPV order performance
08 Special order error
09 TRACE occurrence
76 SDMA Interrupt Occurrence
10
SMD
Brake error(CRT Error Code 10)
Brake Open during UDX off
Check delay time = 1 sec
Brake error. 1BK contact error.
BKA,BKAH signal error.
3=BKA Signal
4=BKAH Signal
5-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 76 -
CODE Content or Cause Data 3-9
11
SMD
Brake Error(CRT Error Code 10)
SDRL On during break closed.
Check delay time =1 sec
1BK contact error, BKA,BKAH signal contact
3-9=Unused
12
SMD
Brake signal error
Different signal of BKA and BKAH
1BK contact error , break error, MNIO borard error.
3=BKA signal
4=BKAH signal
5-9= signal
13
SMD
-Break signal error (Gearless)
Brake Contactor is activated however break is not opened.
Brake Line error,BLS contact error
3=BLS signal
4=Contactor signal
5-9=Unused
Check Time : 1 sec
1FPIT Inundation (Only applied to MRL20)
Call Service Prohibition
3-9=Unused
Chcck Time : 1 sec
20
ONLY
GD
Purse error(Vertical floor reduction speed error)
SLD and SDRH Off are checked by 5LS or 6LS.
Check delay time = 0.5 sec
Pulse error. 5,6LS miswork
3=CAR location floor
4-9=unused
20
ONLY
GL
Pulse error(Vertical floor reduction speed error)
SLD and SDRH Off are checked by 6LS
Check delay time = 0.5 sec
Pulse. 6LS Miswork
3=CAR location floor
4,5=Pulse Counter
6=LS6DL
7=LS5DL
21
Pulse error (sheave worn)
Check incorrect pulse by wear & tear of the
sheave during non-stop run from/to the top
floor and bottom floor. When the error is
above maximum value (100mm) by checking when
check wear & tear with mini console.
3,4=Pulse data
5,6=EEPROM Save Data
7-9=Unused
22
SME
Pulse error(CRT Error Code 16)Pulse compensation error.
In leveling, when wear&tear of pulse exceeds
the maximum compensation value. Pulse counter
error(hardward adjustment). CPU fault (noise)
wear & tear of sheave.
3,4=Pulse Counter
5,6=Compensation
pulse data
7-9=Unused
Compensation
value:amemax
(SW30:120)
23
SMC
Pulse error (CRT Error Code 16)
(Advance error)
Check no advance or reverse advance. Softward
error. Check delay time = 3 sec.
3,4=Advance location
(Pulse data)
5,6=CAR Location
(Pulse data)
7-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 77 -
CODE Content or Cause Data 3-9
24
SME
Pulse error (Error Code 16) Pulse input error
When two readings of P.G pulse data are not
same. Pulse counter error.
Retry of 3 times.
3,4=Input data 1(Pulse data)
5,6=Input data 2(Pulse data)
7-9=Unused
25
SMD
Pulse error (error Code 16)
Pulse counter does not convert during run.
Or it counts for reverse direction.
<Check time>Error occurred if not changed within the below times.
Less 60m/m -> 100msec
Less 300m/m->20msec,
Above 300m/m -> 10msec
Pulse Counter Error(Hardward adjustment),
PG Error
3,4=CAR Location
(Pulse data)
5-9=Unused
26
SMC
Pulse error(CRT Error Code 16)
Input pulse number to Pulse Counter and after
check it again and again which is right.(6 times)
Pulse Counter error
3,4=Pulse CounterPulse data
5-9=Unused
27
SME
Purse error (Purse number error)
Pulse number is bigger than floor journey.
The highest and Lowest floor is ±400mm.
Pulse Counter error, Over Slip
3-9=Unused
Standard value:cpameval
(SW30:110)
28Enforcement reduction speed
Enforcement reduction speed is happened by FSLD signal
3-9=Unused
Preregistered Call Cancel
29
ONLY
GL
Pulse error(Vertical floor reduction speed error)
SLD and SDRH OFF are checked by 5LS On.
Check delay time = 0.5 sec
Pulse error, 5LS error
3=CAR Location floor
4,5=Pulse Counter
6=LS6DL
7=LS5DL
30
Door error (Open command error)
Check if DT is on, in the condition that the door should not open.
Check delay time = 0.5 sec
MNCU Software error
3-9=Unused
31
Door error (software DCLT)
Check if DC is OFF in the condition that the door should not open.check delay time = 0.5 sec
DC contact error. door error(Hard-inter lock)
3=Car Location floor
4,5=Car Pulse Location
6-9=UnUsed
delay time:
dcltdat(SW30:B84)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 78 -
CODE Content or Cause Data 3-9
32
Door error
Hall Door is closing while car door is opening.
Check delay time=5sec
DC Signal error(Input gate broken, disconnected).
Input signal error(Door S/W error)
3=DCX
4=HDC
5-9=Unused
33
DCCI OFF
Check delay time = 0.5 sec
DCCI Signal line, Door Controller
3=DCCI
4=BDCCI
5-9=Unused
34
Retire Cam Error
Retire Cam is On or Off, however Check Cam
Signal is not right.
check delay time:1 sec
RC/RCK Relay, Cam signal, Connected line error
3= Stop floor
4=Retire Cam
Control signal
5=Retire Cam
Check signal
38Real Time Clock error
RTC Data is not normal or it is impossible to Read.3-9=Unused
39Real Time Clock error
Data is not written RTC normally.3-9=Unused
3E
WDT
TASK Initial Error
OS Task is not activated normally.
MNCU error, BUS Error by noise
3-9=Unused
Indicate TFtt"and "FALT" in FND
(tt is task number)
4N
Error codes in 40's are all door software
input signal error, which determine the
correctness as shown as below.
4 3 2 1
0 DC 23DS 18DS
check delay time :5 sec
<Example>
Out of 43, ten's digit 40 means door SW
error, unit digit 3 means that 23DS and 18DS
are on simultaneously. Unused bit is 1 (high)
3=Unused
4=Car Location floor
5,6=Car Pulse Location
7-9=Unused
43 23DS scorch Same as above
44 23DS scorch Same as above
45 complex scorch Same as above
47 18DS scorch Same as above
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 79 -
CODE Content or Cause Data 3-9
50
SMC
UP/DN Logic signal error(CRT Error Code 22)
Check UA On in U On and DA On and UA off in
DA Off and D On
Check delay time = 1 sec
U/D sequence error (MNCU Soft)
3-9=Unused
51
Input signal eror (SM Error)
CC is not off in SM signal mode or when
permanently broken mode.
Check delay time=1.5 sec
SM signal error, MNIO board error
Permanently broken plus is On by noise, etc.
PC2 Signal error.
3-9=Unused
52
SMA
Input signal error (CRT Error Code 23)
CC is not off in CC OFF command.
Check delay time=1.5sec
MNIO board error. PC2 signal error
3-9=Unused
54
SME
Input signal error(CRT Error Code 24)
Pulse location and absolute location
detection rationalization error.
Check delay time= 1 sec
More than 5,6LS, Pulse Counter, More than PG
3=Car Location floor
4,5=Car Pulse Location
6=topf
7=botf
59
SMA
DC signal is not off and 18CS is ON when DT
signal is ON.
DC signal error
check delay time:1000ms
3=DCX
4=HDC
5A
SMB
Input signal error (Above Door S/W )
Error Code 40~4F is maintained more than 1 sec.3-9=Unused
5B
SMB
Input signal error (Above Door S/W)
Error Code 40~4F is occurred more than 5
times within 1 hour.
3-9=Unused
5C
SMB
Input signal error (CRT Error Code 25)
Error Code 60~7F is maintained more than 3 sec.3-9=Unused
5D
SMB
Input signal error (Above landing S/W)
Error Code 60~7F is occurred more than 5 times within 1 hour.3-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 80 -
CODE Content or Cause Data 3-9
6N
ONLY
GD
It is normal that LU, LD are off in the
leveling zone, SDZ is On.
8 4 2 1
LS1 SDZ LU LD
3=Unused
4=Car Location floor
60 Landing VANE signal error SMC, same as above
61 SDZ error (Pulse Counter error) Same as above
62 SDZ error (Pulse Counter error) Same as above
64 LS1 error Same as above
68 SDZ error (Pulse Counter error) Same as above
69 SDZ error (Pulse Counter error) Same as above
6A SDZ error (Pulse Counter error) Same as above
6B LS1 error Same as above
6F LU/LD error SMC, Same as above
6N
ONLY
GL
LU and LD are off in levelling zone.
It is normal that LS1, LS2, and SDZ are On.
10 8 4 2 1
LS2 LS1 SDZ LU LD
3=Unused
4=CAR Location floor
5,6=CAR PULSE Location
7-9=Unused
lvzcdat(SW30:116) is
set 600mm.
60 Landing VANE signal error
64 LS1/LS2 signal error
67 SDZ error
68, 69 LS2, SDZ error SMC(68)
6A Landing VAN signal error
6B LS1 signal error
6C,6D,6E LS2 signal error SMC(6C)
6F, 70 LS1, SDZ error SMC
71, 72 SDZ error
73 LS2 signal error
74 LS1 signal error
77 Landing VANE signal error SMC
78,79,7A SDZ error
7B Landing VAN signal error SMC
7F LU/LD error SMC
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 81 -
CODE Content or Cause Data 3-9
80
FD
CC Cut(CRT Error Code 12) error
CC Off in case of Normal and even though CC off in PAK.
Safety circuit is Cut by CUT and DMUC.
Check delay time = 25 sec
3-9=Unused
82
FD
Start error(CRT Error Code 08)
It has direction and UDX signal is not turned in closing door.
Check time = 60sec
3-9=Unused
83
FD
Door open and close error (CRT Error Code 11)
DC signal is not off in DT On or DT off is not On in DT off.
DC signal is not On.
Check time = 60 sec
3-9=Unused
88
Passenger is confined (CRT Error Code 13)
Door is not open on the condition that Car Call is registered
Check time = 60 sec
3=Car Location
floor
4-9=Unused
8D
Landing error(CRT Error Code 09)
Landing level is not suitable when car is
stopped.(stop except for LU/LD Zone)
Check delay time = 2 sec
3-9=Unused
90
SMA
Operation error (Quake express zone auto low speed operation error)
In quake express zone control, it is not leveled after
a certain time during automatic low speed relevel.
Certain time = (Express zone distance mm/5000)+1×30sec
3,4=Car location
Pulse
5,9=Unused
time:exruntdat
(SW30:B54)
91
SMA
Operation error(CRT Error Code 15)
Rope Slip Error(When slipopf(S30:30E)is installed)
It drives faster than SDRL in Door ZoneLS2 for 4 sec
3-9=Unused
92
SMA
Operation error(CRT Error Code 15)
Rope Slip Error(slipopf(S30:30E))
It drives faster than SDRL in Door ZoneLS2 for
42 sec
3-9=Unused
93
Operation error(CRT Error Code 06)
Door repeated error, 18CS is not On in case
that certain time is passed. HCU error.
18DS error, Door error (dust in Sill)
3=Car Location
floor
4-9=Unused
Time:doertdat
(SW30:B10)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
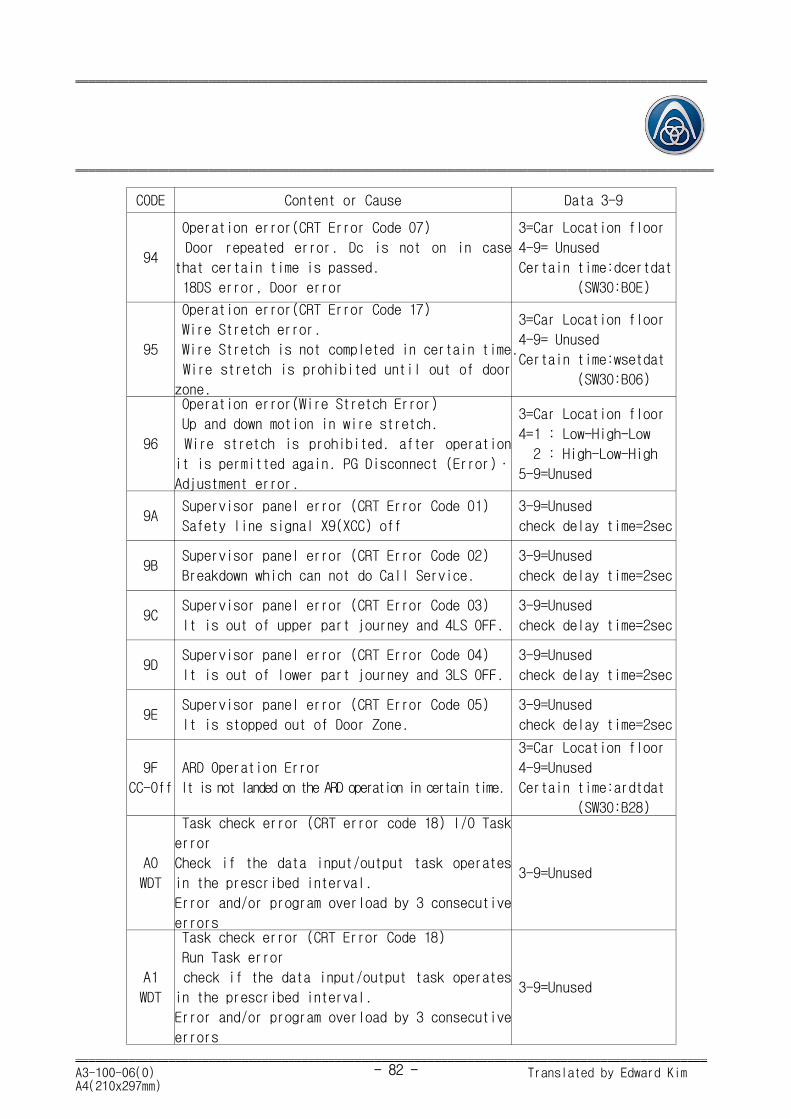
- 82 -
CODE Content or Cause Data 3-9
94
Operation error(CRT Error Code 07)
Door repeated error. Dc is not on in case
that certain time is passed.
18DS error, Door error
3=Car Location floor
4-9= Unused
Certain time:dcertdat
(SW30:B0E)
95
Operation error(CRT Error Code 17)
Wire Stretch error.
Wire Stretch is not completed in certain time.
Wire stretch is prohibited until out of door
zone.
3=Car Location floor
4-9= Unused
Certain time:wsetdat
(SW30:B06)
96
Operation error(Wire Stretch Error)
Up and down motion in wire stretch.
Wire stretch is prohibited. after operation
it is permitted again. PG Disconnect (Error)·
Adjustment error.
3=Car Location floor
4=1 : Low-High-Low
2 : High-Low-High
5-9=Unused
9ASupervisor panel error (CRT Error Code 01)
Safety line signal X9(XCC) off
3-9=Unused
check delay time=2sec
9BSupervisor panel error (CRT Error Code 02)
Breakdown which can not do Call Service.
3-9=Unused
check delay time=2sec
9CSupervisor panel error (CRT Error Code 03)
It is out of upper part journey and 4LS OFF.
3-9=Unused
check delay time=2sec
9DSupervisor panel error (CRT Error Code 04)
It is out of lower part journey and 3LS OFF.
3-9=Unused
check delay time=2sec
9ESupervisor panel error (CRT Error Code 05)
It is stopped out of Door Zone.
3-9=Unused
check delay time=2sec
9F
CC-Off
ARD Operation Error
It is not landed on the ARD operation in certain time.
3=Car Location floor
4-9=Unused
Certain time:ardtdat
(SW30:B28)
A0
WDT
Task check error (CRT error code 18) I/O Task
error
Check if the data input/output task operates
in the prescribed interval.
Error and/or program overload by 3 consecutive
errors
3-9=Unused
A1
WDT
Task check error (CRT Error Code 18)
Run Task error
check if the data input/output task operates
in the prescribed interval.
Error and/or program overload by 3 consecutive
errors
3-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 83 -
CODE Content or Cause Data 3-9
A3
WDT
Task check error(CRT Error Code 18)
Door Task error
Check if the run control task operates in
the prescribed interval.
Error and/or program overload by 3
consecutive errors.
3-9=Unused
A4
WDT
Task check error(CRT Error Code 18)
Door Task error
Check if the run control task operates in
the prescribed interval.
Error and/or program overload by 3
consecutive errors.
3-9=Unused
B0
CPU cross check error
PUG20 increment return error
PUG20 operation check, connection Cable
check
3=Trip count
4-9=Unused
check delay time=5sec
B1
CPU cross check error(CRT Error Code 19)
SLS master increment return error
SLS master station operation check
(overload)
3=Trip count
4-9=Unused
check delay time=5sec
B2
CRT cross check error(CRT Error Code 20)
CRT increment return error
CRT operation check, transmission line
check
check delay time =12 sec
3=Trip count
4-9=Unused
spvinopf(S30:349)
=check if it is 2
B3
SMB
CPU cross check error (CRT Error Code 20)
CCU Increment return error,CCU operation
check (overload)
SLS line transmission error, SLS master
station error.
3=Trip count
4-9=Unused
check delay
time=15sec
B5
SMA
CPU cross check error(CRT Error Code 20)
DMCU increment return error
DMCU operation check (overload)
3=Trip count
4-9=Unused
check delay
time=10sec
B6
SMB
CPU cross check error
Data transmission is unavailable after
certain time by DMCU.
MMCU operation check (overload)
3-9=Unused
check delay
time=30sec
BA
SMB
CPU cross check error
Restarted SLS master station in increment
return error, it is not returned by
restarting 3 times per minute.
3-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
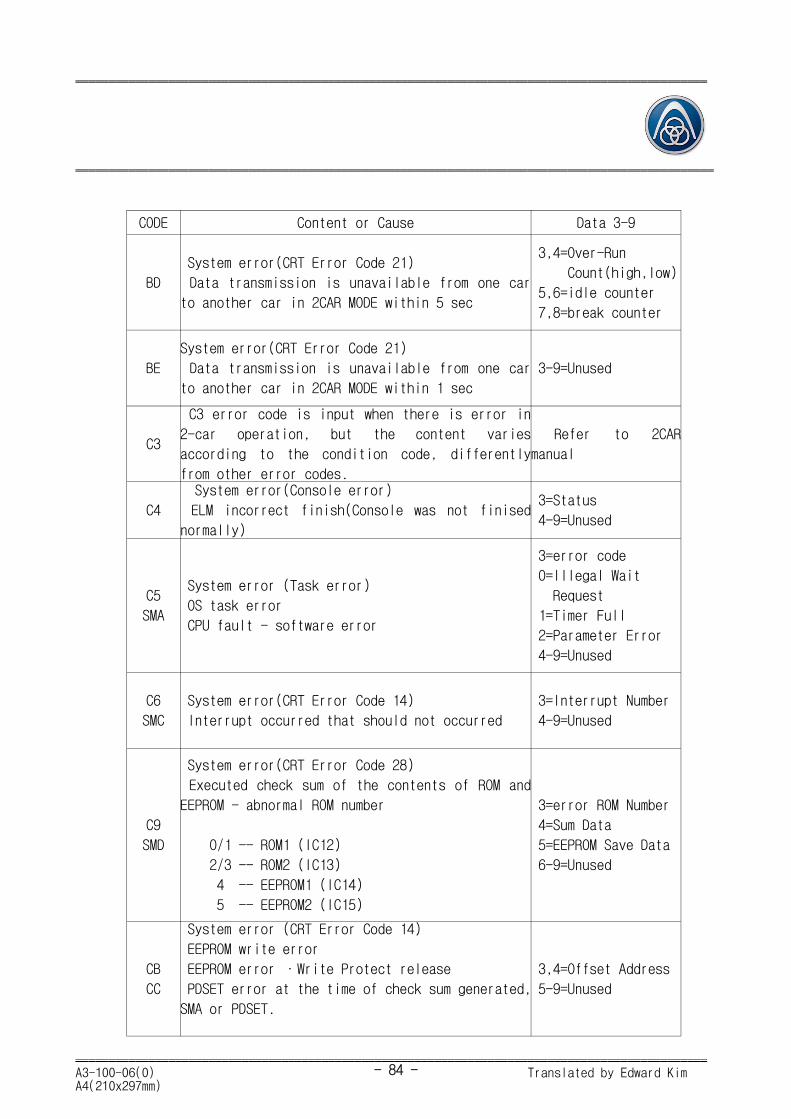
- 84 -
CODE Content or Cause Data 3-9
BD
System error(CRT Error Code 21)
Data transmission is unavailable from one car
to another car in 2CAR MODE within 5 sec
3,4=Over-Run
Count(high,low)
5,6=idle counter
7,8=break counter
BE
System error(CRT Error Code 21)
Data transmission is unavailable from one car
to another car in 2CAR MODE within 1 sec
3-9=Unused
C3
C3 error code is input when there is error in
2-car operation, but the content varies
according to the condition code, differently
from other error codes.
Refer to 2CAR
manual
C4
System error(Console error)
ELM incorrect finish(Console was not finised
normally)
3=Status
4-9=Unused
C5
SMA
System error (Task error)
OS task error
CPU fault - software error
3=error code
0=Illegal Wait
Request
1=Timer Full
2=Parameter Error
4-9=Unused
C6
SMC
System error(CRT Error Code 14)
Interrupt occurred that should not occurred
3=Interrupt Number
4-9=Unused
C9
SMD
System error(CRT Error Code 28)
Executed check sum of the contents of ROM and
EEPROM - abnormal ROM number
0/1 -- ROM1 (IC12)
2/3 -- ROM2 (IC13)
4 -- EEPROM1 (IC14)
5 -- EEPROM2 (IC15)
3=error ROM Number
4=Sum Data
5=EEPROM Save Data
6-9=Unused
CB
CC
System error (CRT Error Code 14)
EEPROM write error
EEPROM error ·Write Protect release
PDSET error at the time of check sum generated,
SMA or PDSET.
3,4=Offset Address
5-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
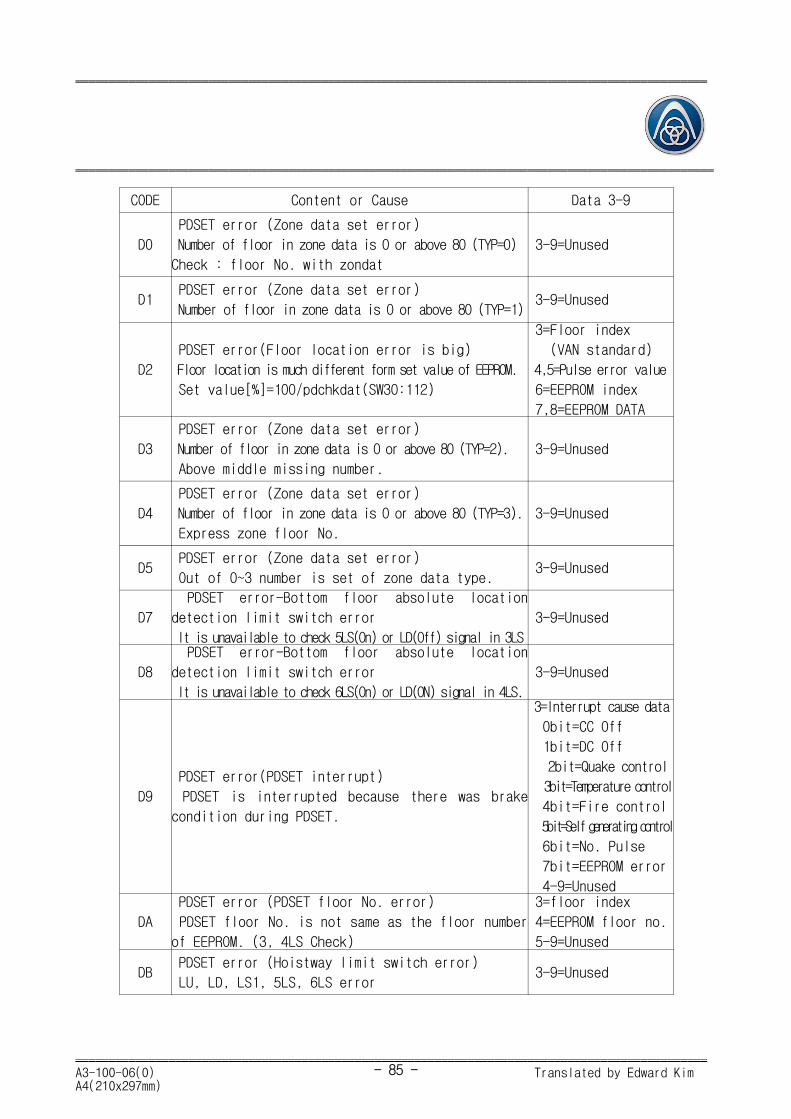
- 85 -
CODE Content or Cause Data 3-9
D0
PDSET error (Zone data set error)
Number of floor in zone data is 0 or above 80 (TYP=0)
Check : floor No. with zondat
3-9=Unused
D1PDSET error (Zone data set error)
Number of floor in zone data is 0 or above 80 (TYP=1)3-9=Unused
D2
PDSET error(Floor location error is big)
Floor location is much different form set value of EEPROM.
Set value[%]=100/pdchkdat(SW30:112)
3=Floor index
(VAN standard)
4,5=Pulse error value
6=EEPROM index
7,8=EEPROM DATA
D3
PDSET error (Zone data set error)
Number of floor in zone data is 0 or above 80 (TYP=2).
Above middle missing number.
3-9=Unused
D4
PDSET error (Zone data set error)
Number of floor in zone data is 0 or above 80 (TYP=3).
Express zone floor No.
3-9=Unused
D5PDSET error (Zone data set error)
Out of 0~3 number is set of zone data type.3-9=Unused
D7
PDSET error-Bottom floor absolute location
detection limit switch error
It is unavailable to check 5LS(On) or LD(Off) signal in 3LS
3-9=Unused
D8
PDSET error-Bottom floor absolute location
detection limit switch error
It is unavailable to check 6LS(On) or LD(ON) signal in 4LS.
3-9=Unused
D9
PDSET error(PDSET interrupt)
PDSET is interrupted because there was brake
condition during PDSET.
3=Interrupt cause data
0bit=CC Off
1bit=DC Off
2bit=Quake control
3bit=Temperature control
4bit=Fire control
5bit=Selfgeneratingcontrol
6bit=No. Pulse
7bit=EEPROM error
4-9=Unused
DA
PDSET error (PDSET floor No. error)
PDSET floor No. is not same as the floor number
of EEPROM. (3, 4LS Check)
3=floor index
4=EEPROM floor no.
5-9=Unused
DBPDSET error (Hoistway limit switch error)
LU, LD, LS1, 5LS, 6LS error3-9=Unused
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 86 -
CODE Content
E0
BOER
Open confirm signal(BKA) is detected without brake open command (1BK).
Check: Abnormal operation of DMCU RY1 scorch of 1BK contact or wrong
wiring of BKA.
E1
BCER
Open confirm signal (BKA) is not detected 1 sec. after brake open
command (1BK).
Check: Fine operation of DMCU RY, 1BK wiring or BKA wiring
E3
STH
IGBT Stack Thermal operation (Above 85℃)
Check : STH wiring, overheat of radiating disc
(GL is PS(Converter) STACK FAN, Temperature error)
E4
MTH
Motor Thermal Operation
Check:MTH wiring, overheat of motor (GL is MT STACK)
(GL is MT(인버터) STACK FAN, Temperature sensor error)
E6
STD1
Start error, SDRL is not detected in NOR operation for 8 seconds after
UDX is On.
PG wiring, BP5A error (PG power supply), DMCU error
E7
STD2
Stop Error, Leveling is not made in NOR operation 랙 8 seconds after
UDX is ON.
Check:Leveling LS wiring and operation, P.G wiring, BP5A
E8
DCLT
Door open during run : DC is not detected at the speed above SDRL.
Check Door controller, DC
E9
INSER
INSERR, INS and NOR signal are not input.
check : INSS S/W error of MNCU board, contact of MNCU↔DMCU(CN2).
EA
PSFCK
3-phase input power error : Main power supply input is below 340V
except in ARD operation.
Check : 3-phase input power voltage, wiring(DMXU, CN5)
EB
MSBCK
Auxiliary CPU error, D8741 CPU status error
Check : U1 (D8741)
EC
MCLCK
Motor control failure : MCC is not detected 0.2 sec. after giving the
exciting current control command.
check : INV LED, STACK, U, V, W ↔ Motor current sensor
ED
PGCHK
One of A and B phases of PG is not input, or A and B phases are
interchanged.
Check: PG, PG wiring
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 87 -
CODE Content
FO
MFD
The difference among the motor tree, speed command and feedback
values are above MF-REF(36m/min).
Check:DMCU EEPROM Data, PG error, check CAR BALANCE.
F1
VDSCK
GD
Power control error, minimum votage failure between P and N, 3-phase
input voltage error, AMC, AMC1 error, 3-phase rectification diode error,
fuse vlown (stack), over-current between P and N.
F2
VDSE
GD
Power control error 2 : VDS voltage is not available for 3 seconds
after CCX is turned on when ARD is off.
Check : AMC1 or AMC error
F3
AMCE
GD
AMC error : AMC auxiliary contact does not available for 3 seconds
after CCX is turned on when ARD is off.
Check : AMC1 or AMC error
F4
XAMCE
GD
XAMC error : XAMC is not off 랙 1 second when CCX is off.
Check : XAMC wiring, AMC aux. contact scorch
F5
DSD
Terminal floor slow down failure : when the speed is at SDRH(90% of
rated speed) when 5LS and 6LS are ON.
Check: 5LS & 6LS attachment, slow down command data error, speed
control error.
F6
OSL
Speed error during Low speed control : SDRL is not detected when SPE
is off. SDRL is detected in WSE operation.
Check: WSE speed setting error, PG.G error, speed control error
F7
MTOC
Motor over current : The current of above 75% of IGBT stack capacity
is detected.
Check : VMTOC setting, magnification of current sensor, control error.
F8
OV
Stack over voltage detected: Above 690V between stack P and N is
detected.
Check: GDU Q7 circuit, regenerative resistance, wiring, GDU setting
FA
FSLDForcing slow down signal is detected (1, 3 & 5SD Check and over speed)
FB
(CON_ERR)
GL
Error occurred in CONVERTER.
check error in converter.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
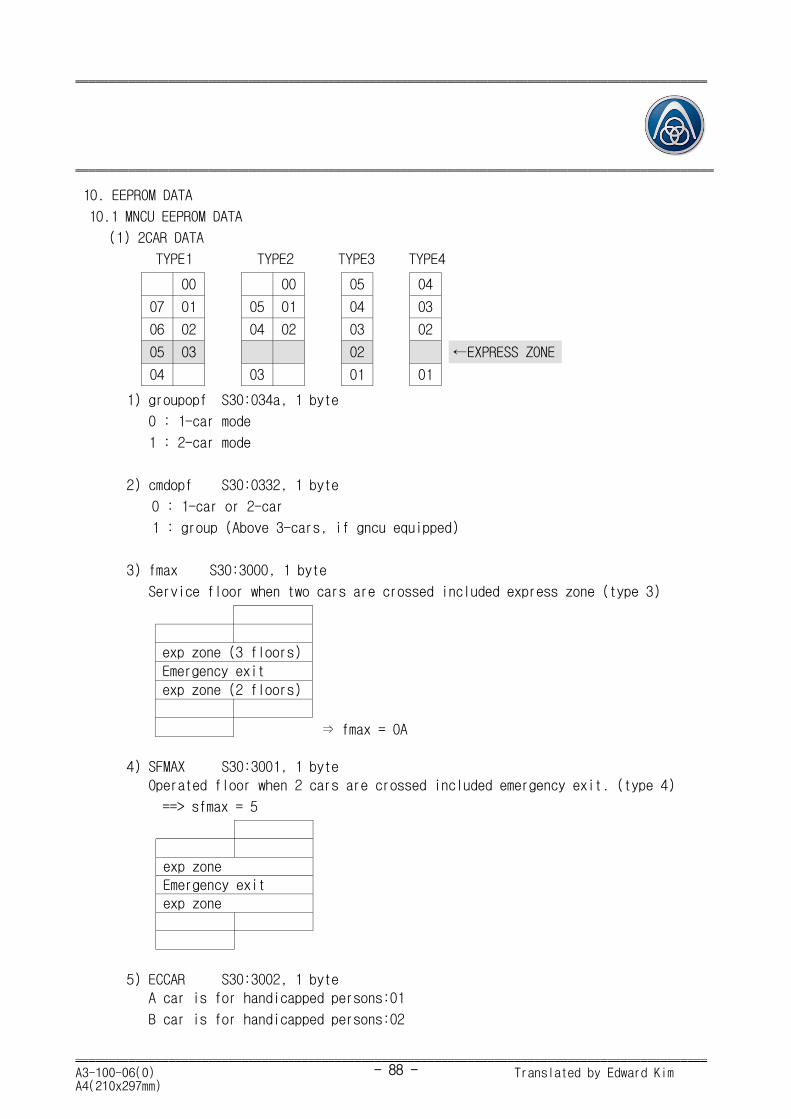
- 88 -
10. EEPROM DATA
10.1 MNCU EEPROM DATA
(1) 2CAR DATA
TYPE1 TYPE2 TYPE3 TYPE4
00
07 01
06 02
05 03
04
00
05 01
04 02
03
05
04
03
02
01
04
03
02
01
←EXPRESS ZONE
1) groupopf S30:034a, 1 byte
0 : 1-car mode
1 : 2-car mode
2) cmdopf S30:0332, 1 byte
0 : 1-car or 2-car
1 : group (Above 3-cars, if gncu equipped)
3) fmax S30:3000, 1 byte
Service floor when two cars are crossed included express zone (type 3)
exp zone (3 floors)
Emergency exit
exp zone (2 floors)
⇒ fmax = 0A
4) SFMAX S30:3001, 1 byte
Operated floor when 2 cars are crossed included emergency exit. (type 4)
==> sfmax = 5
exp zoneEmergency exitexp zone
5) ECCAR S30:3002, 1 byte
A car is for handicapped persons:01
B car is for handicapped persons:02
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 89 -
6) carcidx S30:3003, 1 byte
car index number
A car : 0
B car : 1
7) flighttim SW30:3004 ~ 30:3143, 160 word
- Every seconds are inputted to operate for n floors.
- It is used to calculate estimated arrival time.
But, 1 ≤n ≤fmax * 2
v : Regular speed [m/min]
al : Average floors distance [mm]
8) fchg34 S30:3144 ~ 30:3193,80 byte
- Table to convert from floor type 3 to floor type 4.
- Exit and floors are installed 0
- Service floor : 1 ≤fchg34[n] ≤sfmax
type 3 floor==>
⇒
type 4 floor
(fchg34)
9 5
8 4
7 exp 0
6 exp 0
5Emergency
exit3
4 exp 0
3 exp 0
2 2
1 1
9) xfloor S30:3194, 1 byte
X floor value to allocate hall call (Near floor number)
10) ytime SW30:3196,1 word
- Expected limit time to be allocated for car in operation [sec]
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 90 -
11) tlimit SW30:3198, 1 word
- It is basic time to allocate 2 cars when hall call is not serviced in
certain time. [sec]
fmax < 20 : tlimit = 60 [sec]
fmax ≥ 20 : tlimit = 90 [sec]
12) abtmcflr S30:319a, 1 byte
- Lower floor number which I have service. (type 3)
1 ≤abtmcflr < fmax
13) atopcflr S30:319b, 1 byte
- Upper floor number which I have service. (type 3)
2 ≤atopcflr ≤fmax
14) bbtmcflr S30:319c, 1 byte
- Lower floor number which is serviced by another car.(type 3)
1 ≤bbtmcflr < fmax
15) btopcflr S30:319d, 1 byte
- Upper floor number which is serviced by another car.(type 3)
2 ≤btopcflr ≤fmax
16) cdncmask S30:319e ~ 30:31a7, 10 byte
- Common down call service zone table
- Setting up the service floor bit to 1 for crossing 2 cars make down call
(type 4)
17) cupcmask S30:31a8 ~ 30:31b1, 10 byte
- Common up call service zone table
- Setting up the service floor bit to 1 for crossing 2 cars make up
call(type 4)
18) awdncmask S30:31b2 ~ 30:31bb, 10 byte
- Setting up the service floor to 1 which is down call for itself (type 4)
19) awupcmask S30:31bc ~ 30:31c5, 10 byte
- Setting up the service floor to 1 which is up call for itself (type 4)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 91 -
20) bwdncmask S30:31c6 ~ 30:31cf, 10 byte
- Setting up the service floor to 1 which is down call for another car
(type 4)
21) bwupcmask S30:31d0 ~ 30:31d9, 10 byte
- Setting up the service floor to 1 which is up call for another car
(type 4)
22) vipcidx S30:2942, 1 byte
- Designate VIP car by each bit.
bit 0 : A Car (0 : It is not VIP Car, 1 : VIP Car)
bit 1 : B Car (0 : It is not VIP Car, 1 : VIP Car)
23) vipinadr SW30:2944 ~ 30:2952, 8 word
- Setting up SLS Address (16 Bit data) until VIP Call is inputted as number
of 8
- Setting up 0000 when n+1 is coming in sequence of n.
24) vipinflr S30:2954 ~ 30:295b, 8 byte
- Through SLS address which is installed by vipinadr make set of call floor
location.(floor type 4). It is correspond to vipinadr as one to one.
25) bunsanopf S30:0341, 1 byte
- 0 : diversification waiting function is unavailable.
- 1 : diversification waiting function is available. hlopf should be 0.
26) nhl1flr S30:02b0, 1 byte
- Set up the below diversification waiting floor (Include landing available
floor)
27) nhl2flr S30:02b1, 1 byte
- Set up the above diversification waiting floor (Include landing available
floor)
28) vipopf S30:0316, 1 byte
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 92 -
29) eassopf S30:31da, 1 byte
- 0 : Only general car service when gets general call.
- 1 : Car for handicapped person does service when it gets same call of
general.
- 2 :General car is not classified the mode of handicapped person.
(2) Check 2 cars from MNCU to FND.
1) Set MNCU from RS1 to 5 as belows
RS1 RS2 RS3 RS4 RS5
0 0 0 0 F
2) Check 2 cars operating condition in FND of MNCU and which is as follows.
FND1 FND2 FND3 FND4 Status
d L 0 1 2 Car Normal waiting
d L 0 2One car is operating and one
car is waiting
d L 0 3 2 Cars are operating
d L 0 4One car is out of group in 2
cars
d L 0 5 2 cars are out of group
d L 0 6 VIP
d L 0 7 WLT (DOOR OPEN signal)
d L 0 8 Handicapped person
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 93 -
(3) MNCU OPTION related DATA
ADRS SYMBOL Description SIZE
0000 NFADDATADVANCE Distance setting (Distance from starting
reduction speed to landing)1W
0002 NL80CDAT Set reduction speed point(80CS signal occurrence standard value) 1W
0004 SRNCHKDAT
Set landing compensation value according to operation distance.
(A car journey distance /39)is basic and make it multiple's
positive number gradually. set FFFF the end of sequence.
40W
0054 USRNDAT 1,2,3,4,5,6,7----set 7 40W
00A4 DSRNDAT 1,2,3,4,5,6,7----set 7 40W
0100 UAMEVAL
Set LEVEL ZONE COMPENSATION VALUE
(PULSE COUNTER COMPENSATION VALUE when it is out of LU/LD ZONE)
GD -- (15/PULSE RATE)
GL -- (25/PULSE RATE)
1W
0102 DAMEVALLEVEL ZONE COMPENSATION SETTING
SW30: 2 OF 100 REPAIRING VALUE IS REGISTERED.1W
0104 IADLDAT SET INITIAL ADVANCE VALUE(BASIC : 150/PULSE RATE) 1W
0106 DASTPDAT SET ADVANCE STEP DATA ((BASIC : 600/PULSE RATE) 1W
0108 APAMDAT SET ADVANCE COMPENSATION DATA (BASIC : 50/PULSE RATE) 1W
010A SLDDLDAT SET REDUCTION SPEED COMMAND POINT 1W
010C DZUAMEVAL
SET DOOR ZONE COMPENSATION VALUE
(PULSE COUNTER COMPENSATION VALUE WHEN IT IS OUT OF DOOR ZONE)(200/PULSE RATE) VALUE
1W
010E DZDAMEVALSET DOOR ZONE COMPENSATION VALUE
COMPENSATION VALUE OF 2 OF (200/PULSE RATE)1W
0110 CPAMEVAL OPERATION ZONE VERTICAL SPACE SETTING(200/PULSE RATE) 1W
0112 PDCHKDATSET FLOOR ERROR APPROVAL ALLOWANCE (100/ALLOWANCE
ERROR[%]), BASIC : 0뭓000A1W
0116 LVZCDAT SET LANDING ZONE CHECK DATA (600/PULSE RATE) 1W
011A DZLNG SET DOOR ZONE DISTANCE(BASIC : 400/PULSE RATE) 1W
011C OLDETDAT SET BASIC LOADING OF OVER WEIGHT (0뭓0050(80%) ) 1W
0120 AMEMAXSET ALLOWANCE ERROR RANGE WHEN IT LANDED PULSE COUNTER LU/LD ZONE.
{(PULSE VALUE OF SERVICE ZONE MINIMUM FLOORS DISTANCE)/3}1W
0122 PLSRATESET PULSE RATE
INPUT (PULSE RATE뭓100)1W
0124 LSCHKSPD2SET OPERATION SPEED AS MINUTES TO CHECK LIMIT SWITCH OF ELEVATOR VANE.
SET THE SPEED RATE AS MINUTES (BASIC VALUE 0뭓000A)1W
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 94 -
ADRS SYMBOL DESCRIPTION SIZE
01D0 HLFLROPF
SET HIGH FLOOR SERVICE
LESS 40 FLOORS(01~40)「00」, MORE THAN 40
FLOOR(41~80)「01」
1B
01D1 LHIBOPF
WHEN LHIB(SHIB) IS INSTALLED, SETTING OPTION
NOTHING「00」, EXISTENCE「01」
S30:3F40∼3F8F=85,84~81,01,02~4B(DSPFLRDAT)
1B
01D2 LDSINOPF
LDS(DLS) SIGNAL INPUT CHOICE
Serial「00」, Parallel「01」
CNS309-2(LDS),CNS309-4(BLDS)
1B
01D3 OPENWTOPF
WHEN IT IS STOPPED,DOOR OPEN WAITING OPTION
「00」Close WAITING
「01」 Open WAITING,FAN OFF,LIGHT ON
「02」 Open WAITING,FAN OFF,LIGHT OFF
1B
01D4 DPRAM2OPFMNCU8A CREATION DATA(USE LSIF20 CN6∼CN9 PORT)
ONLY USE COM-A.「00」, USE COM-A AND COM-B 「01」1B
01D5 HCJAMOPF
LCU34,36A(B) WHEN IT USES, JAM FUNCTION OPTION
Nothing「00」, Existence「01」
S30:B51=「00」2 MIN,「01」3MIN,
「02」4MIN,「03」5MIN (JAMTIMDAT)
1B
01D6 VIPSPDOPF
WHEN VIP CALL HAPPENS, CAR SPEED-UP OPTION(IT IS NOT
WORKS WHEN SILENCE OPERATION)
NOTHING「00」, EXISTENCE「01」
1B
01D7 GRPTIMEROPFAPPLY PUG TIME TO MNCU
NOTHING「00」, EXISTENCE「01」1B
01D8 SUBUNITOPFAPPLY TO SUB OPERATION DEVICE (ROOMLESS)
NOTHING「00」, EXISTENCE「01」1B
01D9 LDBELLOPF
APPLY TO NEWLY BROADCASTING DEVICE OPTION
(EAS-DY20LBA)
NOTHING「00」, EXISTENCE「01」
1B
01DA GEHCINOPF
CHANGE GROUP HANDICAPPED PERSON CALL INPUT (FLOORS
MORE THAN 40, IT GETS HANDICAPPED HALL CALL FROM
HANDICAPPED PERSON'S CAR DIRECTLY.)
NOTHING「00」, EXISTENCE「01」
1B
01DB FDGENOPF
SUPERVISOR PANEL FD SIGNAL OUTPUT OPTION WHEN IT IS
FDS CUT
NOTHING「00」, EXISTENCE「01」
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 95 -
ADRS SYMBOL DESCRIPTION SIZE
01DC MCUOPF
CHOOSE MCU BOARD
DMCU APPLICATION(DY20L)「00」, PMCU APPLICATION
(DY35L)「01」
SW30:02C0 = AFTER LANDING UP/DN SIGNAL OFF DELAY
TIME [10mS]
(BASIC VALUE : 0뭓0096)
1B
01DD CARDKEYOPF
CAR CALL CARD KEY FUNCTION
NOTHING「00」, EXISTENCE「01」
S30 : 339 = 00
SW30 : 2416 = 0161
S30 : 2161 = 01
S30 : 2418 = CARD KEY SET APPLICATION FLOOR(10B)
SW30 : B70 = 0096
SW30 : B98 = 003C
1B
01F8 FUNC1OPF
REGULAR SPEED CHANGE WHEN SIGNAL IS INPUTTED IN VIP
(SILENT OPERATION IS NOT AVAILABLE)
NOTHING「00」, EXISTENCE「01」
1B
0200 DSPAP1TBL INDICATE CONDITION OF CAR, SET INDEX 8B
0225 DSPAP3TBL HALL STATUS INDICATION INDEX SETTING 8B
0273 SPVLMPIDXTBL SUPERVISION PANEL INDICATION INDEX SETTING 32B
02BO NHL1FLRSET A LOWER PART OF DISPERSION WAITING (IT IS
INVOLVED IN LANDING AVAILABLE FLOOR)1B
02B1 NHL2FLRSET A UPPER PART OF DISPERSION WAITING (IT IS
INVOLVED IN LANDING AVAILABLE FLOOR)1B
02BA CBSFLR CALL BACK ASSIGNMENT FLOOR 1B
02BB NIGHTSTHOUR STARTING SILENT OPERATION BY HOUR [BCD] 1B
02BC NIGHTSTMIN STARTING SILENT OPERATION BY MINUTES [BCD] 1B
02BD NIGHTENDHOUR WHEN IT FINISHES OF SILENT OPERATION BY HOUR[BCD] 1B
02BE NIGHTENDMIN WHEN IT FINISHES OF SILENT OPERATION BY MINUTES [BCD] 1B
02C0 DIRDLTIMEAFTER LANDING, UP/DN SIGNAL OFF DELAY TIME
[10mS](BASIC VALUE:0뭓0096)1W
02C2 CRTDLYTIMSUPERVISOR PANEL INPUT SIGNAL DELAY TIME [mS](BASIC
0064H)1W
0300 INDOPFIND OPERATION
NOTHING「00」, EXITSENCE「01」1B
0301 ATTOPF
ATT OPERATION
NOTHING「00」, PCS ADHESION「01」, PCS NON-ADHESION
「02」
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
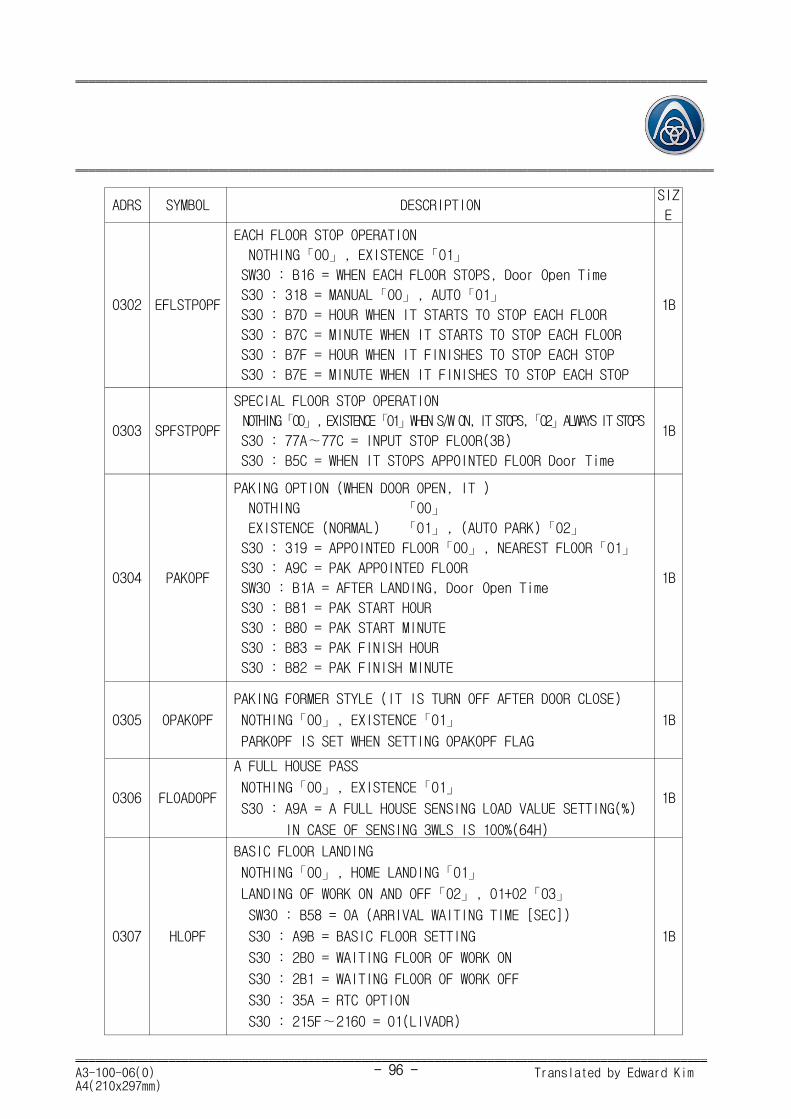
- 96 -
ADRS SYMBOL DESCRIPTIONSIZ
E
0302 EFLSTPOPF
EACH FLOOR STOP OPERATION
NOTHING「00」, EXISTENCE「01」
SW30 : B16 = WHEN EACH FLOOR STOPS, Door Open Time
S30 : 318 = MANUAL「00」, AUTO「01」
S30 : B7D = HOUR WHEN IT STARTS TO STOP EACH FLOOR
S30 : B7C = MINUTE WHEN IT STARTS TO STOP EACH FLOOR
S30 : B7F = HOUR WHEN IT FINISHES TO STOP EACH STOP
S30 : B7E = MINUTE WHEN IT FINISHES TO STOP EACH STOP
1B
0303 SPFSTPOPF
SPECIAL FLOOR STOP OPERATION
NOTHING「00」, EXISTENCE「01」WHEN S/W ON, IT STOPS,「02」ALWAYS IT STOPS
S30 : 77A∼77C = INPUT STOP FLOOR(3B)
S30 : B5C = WHEN IT STOPS APPOINTED FLOOR Door Time
1B
0304 PAKOPF
PAKING OPTION (WHEN DOOR OPEN, IT )
NOTHING 「00」
EXISTENCE (NORMAL) 「01」, (AUTO PARK)「02」
S30 : 319 = APPOINTED FLOOR「00」, NEAREST FLOOR「01」
S30 : A9C = PAK APPOINTED FLOOR
SW30 : B1A = AFTER LANDING, Door Open Time
S30 : B81 = PAK START HOUR
S30 : B80 = PAK START MINUTE
S30 : B83 = PAK FINISH HOUR
S30 : B82 = PAK FINISH MINUTE
1B
0305 OPAKOPF
PAKING FORMER STYLE (IT IS TURN OFF AFTER DOOR CLOSE)
NOTHING「00」, EXISTENCE「01」
PARKOPF IS SET WHEN SETTING OPAKOPF FLAG
1B
0306 FLOADOPF
A FULL HOUSE PASS
NOTHING「00」, EXISTENCE「01」
S30 : A9A = A FULL HOUSE SENSING LOAD VALUE SETTING(%)
IN CASE OF SENSING 3WLS IS 100%(64H)
1B
0307 HLOPF
BASIC FLOOR LANDING
NOTHING「00」, HOME LANDING「01」
LANDING OF WORK ON AND OFF「02」, 01+02「03」
SW30 : B58 = 0A (ARRIVAL WAITING TIME [SEC])
S30 : A9B = BASIC FLOOR SETTING
S30 : 2B0 = WAITING FLOOR OF WORK ON
S30 : 2B1 = WAITING FLOOR OF WORK OFF
S30 : 35A = RTC OPTION
S30 : 215F∼2160 = 01(LIVADR)
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 97 -
ADRS SYMBOL DESCRIPTION SIZE
0308 LOADCNOPFNUISANCE CALL CANCEL
NOTHING「00」, EXISTENCE「01」1B
0309 FANATOPF
CAR내 FAN AUTOMATIC STOP
NOTHING「00」, EXISTENCE「01」
SW30 : B02 = FAN CONTROL EXPIRE TIME [SEC]
1B
030A ARDOPF
ARD OPERATION
NOTHING「00」, EXISTENCE「01」
SW30 : B28 = OPERATING TIME SETTING 3C(60SEC)
(SUITABLE VALUE SETTING OF 3C~FF)
SWD000 : 52 = SPEED SETTING 05(6m/min) ⇒ DMCU
00~0B(1∼12m/mim)
0C(12.75m/min)
SWD000 : 7A = CONTROL LANDING PATTERN 15H ⇒ DMCU
(SUITABLE VALUE SETTING IN 00 ~ 2DT)
1B
030B DIRREVOPFFinal car call turning in the re-verse direction.
NOTHING「00」, EXISTENCE「01」1B
030C LITATOPF
Light automatic stop in car
Nothing「00」, Existence「01」
SW30 : B04 = Lightning control expire time[SEC]
1B
030D RVKCOPFCAR CALL CANCEL turning in the re-verse direction
Nothing「00」, Existence「01」1B
030E SLIPOPF
Rope SLIP CHECK(It is detected DOOR ZONE is not
ON/OFF)
Overseas「00」, Domestic「01」
1B
030F HEVOPF
DOOR HEAVY OPTION
Nothing「00」, Existence「01」
S30 : 77D = High speed door installation floor bit
conversion (Non service floor is included.)
1B
0310 NUDOPF
DOOR CLOSE Promotion OPTION
Nothing「00」, Existence「01」
SW30 : B18 = CLOSE Promotion waiting time[SEC]
1B
0311 DOXOPF
DOOR OPEN EXTENDING OPTION
Nothing「00」, Existence「01」
SW30 : B14 = OPEN Extending time[SEC]
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 98 -
ADRS SYMBOL DESCRIPTION SIZE
0312 DOMNOPF
DOOR OPEN AUTOMATIC CONTROL (PHOTO CELL)
NOTHING「00」, EXISTENCE「01」
SW30 : B1E (DOM1TDAT)
SW30 : B20 (DOM2TDAT)
SW30 : B22 (DOM3TDAT)
SW30 : B24 (DOM4TDAT)
SW30 : B26 (DOM5TDAT)
1B
0313 CGONGOPF
CAR GONG(CHIME) OPTION
NOTHING「00」, EXISTENCE「01」
SW30 : 458 = CHIME ON LOCATION VALUE IN UP
OPERATION
SW30 : 456 = CHIME ON LOCATION VALUE IN DOWN
OPERATION
1B
0314 ANAOPF
AUTOMATIC BROADCASTING GUIDANCE
NOTHING「00」, EXISTENCE「FB00」
1W
BIT
15
BIT
14
BIT
13
BIT
12
BIT
11
BIT
10
BIT
9
BIT
8
BIT
7
BIT
0-6
Break
down
Earth
quakeFire
Black
out
A
full
house
DCLevel
ing
Direc
tion
Emerg
ency
S30:3EE=01(UP) S30:3EF=02(DN) S30:3F0=04(Full house)
S30:3F1=06(Fire) S30:3F2=08(Breakdown) S30:3F3=00
S30:3F4=00(VIP) S30:3F5=00(ARD) S30:3F6=09(1 floor)
S30:3F7=0A(2 floor) S30:3F8=0B(3 floor) S30:3F9=0C(4
floor)
S30:3FA=0D(5 floor) S30:3FB=0E(6 floor)
S30:3FC=0F(7 floor)
S30:3FD=10(8 floor) S30:3FE~405=00
S30:406~455=85(under 5 floor)~(Floor DATA)
<Special floor> C1(Robby) C2(Rooftop) C3(Shelter
floor)
C4(Parking floor) C5(Underground floor)
C6(Middle first floor)
C7(Middle second floor) C8(Middle third
floor) C9(M floor) CA(F floor)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 99 -
ADRS SYMBOL DESCRIPTION SIZE
0316 VIPOPF
VIP OPTION
NOTHING「00」, EXISTENCE「01」
SW30 : B7C = VIP DOOR OPEN TIME (DTVIP)
1B
0317 DC3MOPF
ENFORCEMENT DOOR CLOSE FOR 3 MINUTES
NOTHING「00」, EXISTENCE「01」
SW30 : B7A = EXPIRE CHECK TIME[SEC]
1B
0318 TEFLOPFTIMER : EACH FLOOR STOP
NOTHING「00」, EXISTENCE「01」1B
0319 NFPAKOPFNEAREST FLOOR PARKING
NOTHING「00」, EXISTENCE「01」1B
031A WSEOPF
WIRE STRETCH OPTION
NOTHING「00」, EXISTENCE「01」
SW30 : B06 = 000A
SWD000 : 8E = 01 ⇒DMCU
1B
031B APASOPF
AUTO PASS OPTION
NOTHING「00」, EXISTENCE「01」
S30:1118~111F=PASS FLOOR SET
S30 : 3DD = 00
S30 : B8C = MINUTES WHICH START (HEX)
S30 : B8D = HOURS WHICH START (HEX)
S30 : B8E = MINUTE WHICH FINISH (HEX)
S30 : B8F = HOUR WHICH FINISH (HEX)
1B
031C RMSOPFBUILDING COMMAND OPTION
NOTHING「00」, EXISTENCE「01」1B
031D DSTOPFDAYLIGHT SAVING TIME APPLICATION(SUMMER TIME)
NOTHING「00」, EXISTENCE「01」1B
031E DCBZOPFDOOR CLOSE BUZZER
NOTHING「00」, WXISTENCE「01」1B
0321 FDBZOPF
NOTHING「00」, EXISTENCE「01」
Car Buzzer ON IN FD CONDITION
IT IS TURN OFF WHEN FDBZC SIGNAL INPUT OF SUPERVISOR
PANEL.
1B
0322SAOPF
(HOTELOPF)
SINGLE-AUTO(LOVE HOTEL) OPTION
NOTHING「00」, EXISTENCE「01」1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 100 -
ADRS SYMBOL DESCRIPTION SIZE
0323 LSPDOPF
SILENT OPERATION
NOTHING「00」, EXISTENCE「01」
SW30 : 3D6 = FULL ADVANCE
SW30 : 3D8 = NL80CS
S30 : 2BB = HOUR WHICH START (DECIMAL)
S30 : 2BC = MINUTE WHICH START (DECIMAL)
S30 : 2BD = HOUR WHICH FINISH (DECIMAL)
S30 : 2BE = MINUTE WHICH FINISH(DECIMAL)
SWD000 : 42 =「01」30M,「02」45M,「03」60M ⇒ DMCU
1B
0324 CBSOPF
CALL BACK OPTION
NOTHING「00」, EXISTENCE「01」
S30 : 2BA = APPOINTED FLOOR
1B
0325 HCTGLOPFHALL CALL TOGGLE
NOTHING「00」, EXISTENCE「01」1B
0326 HPWROPF
LHIB(LDM) POWER DOWN OPTION
NOTHING「00」, EXISTENCE「01」
SW30 : B90 = WAITING TIME[SEC]
1B
0327 HDBZOPF
HALL DOOR OPEN BUZZER FUNCTION
NOTHING「00」, EXISTENCE「01」
SW30 : B92 = 12C(3 SEC:DELAY TIME)
1B
0328 DOOPENPAKOPFPARKING시 DOOR STOP OPTION
CLOSE STOP「00」, OPEN STOP「01」1B
0329 FIROPF
FIRE RELATED OPERATION
NOTHING「00」, EXISTENCE(FIRE CONTROL)「01」,
EXISTENCE(PREVENT A FIRE OF 1,2)「02」
EXISTENCE (BS)「03」S30:2161=01(LIVADR)
S30:343=02(FRETFMANOPF)
S30:349=00(SPVINOPF)
S30:330=02(OEMOPF)
SW30:AE0=161(FIREINADR)
SW30:AE2=01(FIREINBIT)
S30 : A9F = SHELTER FLOOR
1B
032A FMROPF
BS FIREMAN(G/L ONLY)
NOTHING「00」, EXISTENCE「01」
S30 : A9F = SHELTER FLOOR
1B
032B THROPF
MACHINE ROOM TEMPERATURE CONTROL OPERATION
NOTHING「00」, EXISTENCE「01」
S30 : A9F = SHELTER FLOOR
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 101 -
ADRS SYMBOL DESCRIPTION SIZE
032C EPWOPF
SELF GENERATING CONTROL OPERATION
NOTHING「00」, EXISTENCE「01」
S30 : A9F = SHELTER FLOOR
S30 : 32E = EXPRESS ZONE NOTHING「00」
EXPRESS ZONE EXISTENCE「01」
1B
032D EQOPF
EARTHQUAKE CONTROL OPERATION
NOTHING「00」, EXISTENCE「01」
S30 : A9F = SHELTER FLOOR
S30 : 32E = EXPRESS ZONE NOTHING「00」
EXPRESS ZONE EXISTENCE「01」
1B
032E EXPOPFEXPRESS ZONE
NOTHING「00」, EXISTENCE「01」1B
032F RSQOPF
SIDE RESCUE OPERATION
NOTHING「00」, EXISTENCE「01」
S30 : A9E = SHELTER FLOOR
S30 : 7DC = STOP LOCATION WHEN RESCUE OPERATION OF UP (PULSE VALUE)
S30 : 7DD = STOP LOCATION WHEN RESCUE OPERATION OF DN (PULSE VALUE)
1B
0330 OEMOPFOVERSEAS CONTROL OPERATION
DOMESTIC「00」, OVERSEAS「01」, ETCS「02」1B
0331 ECOPFONLY FOR HANDICAPPED PERSON OPERATION
NOTHING「00」, EXISTENCE「01」1B
0332 CMDOPFGROUP MANAGEMENT OPTION
NOTHING「00」, EXISTENCE (MORE THAN 3CAR)「01」1B
0333 GL20OPF
Gearless CHOICE
「00」GD SYSTEM,「01」GL SYSTEM
SW30:02C4 = UP/DN OFF SIGNAL AFTER LANDING ZONE,
DELAY TIME IS BASIC VALUE 0뭓00C8 [10mS]
SW30:240E = Set waiting time after brake opens
until advance data is increasing.[10mS]
Above 150m/min : 0뭓0064
Less 150m/min : 0000
1B
0334 HLDOIOPF
It is prohibited to open door as arrive at basic
floor.
Nothing「00」, Existence「01」
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
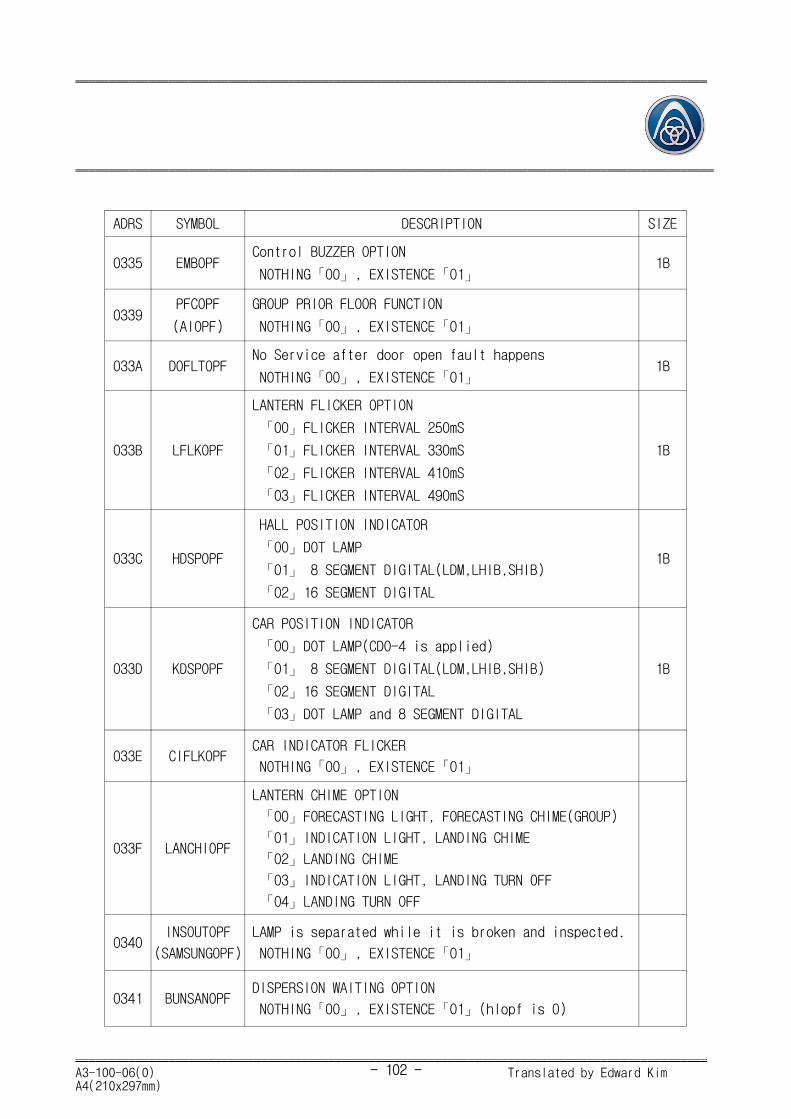
- 102 -
ADRS SYMBOL DESCRIPTION SIZE
0335 EMBOPFControl BUZZER OPTION
NOTHING「00」, EXISTENCE「01」1B
0339PFCOPF
(AIOPF)
GROUP PRIOR FLOOR FUNCTION
NOTHING「00」, EXISTENCE「01」
033A DOFLTOPFNo Service after door open fault happens
NOTHING「00」, EXISTENCE「01」1B
033B LFLKOPF
LANTERN FLICKER OPTION
「00」FLICKER INTERVAL 250mS
「01」FLICKER INTERVAL 330mS
「02」FLICKER INTERVAL 410mS
「03」FLICKER INTERVAL 490mS
1B
033C HDSPOPF
HALL POSITION INDICATOR
「00」DOT LAMP
「01」 8 SEGMENT DIGITAL(LDM,LHIB,SHIB)
「02」16 SEGMENT DIGITAL
1B
033D KDSPOPF
CAR POSITION INDICATOR
「00」DOT LAMP(CDO-4 is applied)
「01」 8 SEGMENT DIGITAL(LDM,LHIB,SHIB)
「02」16 SEGMENT DIGITAL
「03」DOT LAMP and 8 SEGMENT DIGITAL
1B
033E CIFLKOPFCAR INDICATOR FLICKER
NOTHING「00」, EXISTENCE「01」
033F LANCHIOPF
LANTERN CHIME OPTION
「00」FORECASTING LIGHT, FORECASTING CHIME(GROUP)
「01」INDICATION LIGHT, LANDING CHIME
「02」LANDING CHIME
「03」INDICATION LIGHT, LANDING TURN OFF
「04」LANDING TURN OFF
0340INSOUTOPF
(SAMSUNGOPF)
LAMP is separated while it is broken and inspected.
NOTHING「00」, EXISTENCE「01」
0341 BUNSANOPFDISPERSION WAITING OPTION
NOTHING「00」, EXISTENCE「01」(hlopf is 0)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 103 -
ADRS SYMBOL DESCRIPTION SIZE
0342 ALLBACKOPF
This is service if one car is not available to do
service, another car does the service instead.
NOTHING「00」, EXISTENCE「01」
1B
0343 FRETFMANOPF
FUNCTION PERFORMED TO FIROPF FROM FIR SIGNAL OF「00」.
"FIR" SIGNAL OF 「01」Serial USE ONLY FIRE
CONTROL.(SUPERVISOR PANEL IS EXISTED.)
"FIR" SIGNAL OF 「02」Serial USE ONLY FIRE
CONTROL.(SUPERVISOR PANEL IS NOT EXISTED.)
FIROPF(S30:329)
1B
0344 HLDOIOPF
It is function not to close and open the door after HL landing.
「00」means open and close door.
「01」means not open and close door.
1B
0345 HLINHOPF
Control of Home-Landing from external signal.
「00」: Nothing
「01」: HLINH signal (Bit6-40H of serial 234
address) and HLOPF(S30:307) is only active of
Home-landing when it is 1.
1B
0346 DROCKOPF
RETIRE CAM OPTION
Nothing : 「00」, Existence「01」
SW30 : B68 = Hex value of 10ms units is set which necessary
time to supply initial extra electricity of Retire-Cam.
1B
0347 HCREOPNOPF
DOOR REOPEN function (2CAR)
Only Reopen is performed by 「00」allocation.
Immediate reopen is performed without related 「01」allcation.
1B
0348 RNOPNOPFRUNNING OPEN Function
Nothing「00」, Existence「01」1B
0349 SPVINOPF
CRT SVP COMMAND OPTION
Nothing「00」, Existence(MINI)「01」,
Existence(OFFICE)「02」
1B
034A GROUPOPFGroup management OPTION
1CAR「00」, Group management and 2CAR「01」1B
034B ECUOPFECU-20 Use OPTION
Nothing「00」, Existence「01」1B
034C SPDOPFSPEED OPTION
More than 「00」60m/min, Less「01」60m/min1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
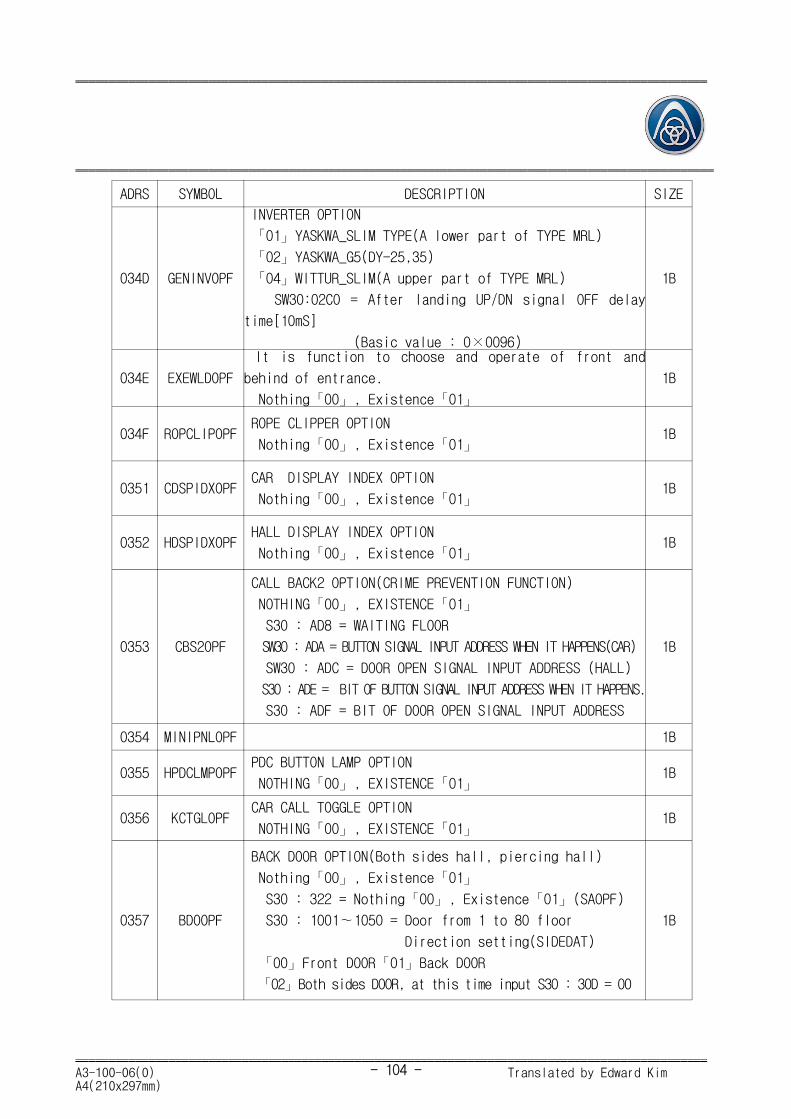
- 104 -
ADRS SYMBOL DESCRIPTION SIZE
034D GENINVOPF
INVERTER OPTION
「01」YASKWA_SLIM TYPE(A lower part of TYPE MRL)
「02」YASKWA_G5(DY-25,35)
「04」WITTUR_SLIM(A upper part of TYPE MRL)
SW30:02CO = After landing UP/DN signal OFF delay
time[10mS]
(Basic value : 0뭓0096)
1B
034E EXEWLDOPF
It is function to choose and operate of front and
behind of entrance.
Nothing「00」, Existence「01」
1B
034F ROPCLIPOPFROPE CLIPPER OPTION
Nothing「00」, Existence「01」1B
0351 CDSPIDXOPFCAR DISPLAY INDEX OPTION
Nothing「00」, Existence「01」1B
0352 HDSPIDXOPFHALL DISPLAY INDEX OPTION
Nothing「00」, Existence「01」1B
0353 CBS2OPF
CALL BACK2 OPTION(CRIME PREVENTION FUNCTION)
NOTHING「00」, EXISTENCE「01」
S30 : AD8 = WAITING FLOOR
SW30 : ADA = BUTTON SIGNAL INPUT ADDRESS WHEN IT HAPPENS(CAR)
SW30 : ADC = DOOR OPEN SIGNAL INPUT ADDRESS (HALL)
S30 : ADE = BIT OF BUTTON SIGNAL INPUT ADDRESS WHEN IT HAPPENS.
S30 : ADF = BIT OF DOOR OPEN SIGNAL INPUT ADDRESS
1B
0354 MINIPNLOPF 1B
0355 HPDCLMPOPFPDC BUTTON LAMP OPTION
NOTHING「00」, EXISTENCE「01」1B
0356 KCTGLOPFCAR CALL TOGGLE OPTION
NOTHING「00」, EXISTENCE「01」1B
0357 BDOOPF
BACK DOOR OPTION(Both sides hall, piercing hall)
Nothing「00」, Existence「01」
S30 : 322 = Nothing「00」, Existence「01」(SAOPF)
S30 : 1001∼1050 = Door from 1 to 80 floor
Direction setting(SIDEDAT)
「00」Front DOOR「01」Back DOOR
「02」Both sides DOOR, at this time input S30 : 30D = 00
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 105 -
ADRS SYMBOL DESCRIPTION SIZE
0358 KCBEEPOPFCAR CALL BEEP
Nothing「00」, Existence「01」1B
0359 DOTOPF
DOT LAMP OPTION
Nothing「00」, Existence「01」
S30 : F9E∼FCA = 85∼81, 01∼28
1B
035A RTCOPFRTC OPTION
DALAS product「00」, MOTOROLA product「01」1B
035B DLSOPFLDS(DLS) contact point input
A contact point「00」, B contact point「01」1B
035C SAOPF
SINGLE-AUTO OPTION
Nothing「00」, Existence「01」
AUTDCOPF(S30:035E) ⇒ Automatic door close function
AUTDCTME(SW30:0B96)[SEC]
CARLIFTOPF(S30:035D) ⇒ Car Lift Option
LDCLTTME(SW30:B94)[SEC]
SAREOPNOPF(S30:35F) ⇒ Reopen Option by Button
REOPCLOPF(S30:360) ⇒ Reopen Option시 Call Clear
CAGE indication Index Value = LAMP using for 11H ⇒ S30:200⇒11
HALL Indication Index Value = 0CH using with LAMP ⇒ S30:22A⇒0C
1B
035D CARLIFTOPF
E/L is stopped for safety when photo cell signal
inputted of cage in case of CAR LIFT.
When PHOTO CELL signal is cancelled, it is automatically re
start by indicated LDCLTTME which time is over.
Nothing「00」, Existence「01」
SW30 : 0B94 = DCLT Restart waiting time.
1B
035E AUTDCOPF
Automatic Door closing function
Nothing「00」, Existence「01」
SW30 : 0B96 = Automatic Door close waiting time
1B
035F SAREOPNOPFDoor Reopen function by "calling"
Nothing「00」, Existence「01」1B
0360 REOPCLOPF
It is eliminate function which reopen door by some
signal, first registered signal is cancelled.
Nothing「00」, Existence「01」
1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 106 -
ADRS SYMBOL DESCRIPTION SIZE
0361 UPDOOROPF
UP-DOOR OPTION
Nothing「00」, Existence「01」
DCERTDAT(SW30:0B0E)[SEC]=15
DOERTDAT(SW30:0B10)[SEC]=15
HLDSADR(SW30:0BDC)=122(A contact point),16C(B contact
point)
BHLDSADR(SW30:0BDE)=123(A contact point),16D(B
contact point)
FPOSADR(SW30:0BE0)=0041
UPDORCADR(SW30:0BE2)=0043
Operation prohibition signal --(Bit0)
Door-Zone Signal--(Bit1, Front/Back )
In case SPDOPF(S30:034C):23DS signal is not existed,
make it "1", and do c13sflg and b13csflg function by
door close signal.
1B
0362 BITSLINADR
BIT PASS by SLS Line
Set the SLS address which is going to input Pass Data.
If it is not used, set 00.
BITSLSTDAT(S30:365)
BITSLINCNT(S30:364)
1W
0364 BITSLINCNT Expected Byte number from BITSLINADR address 1B
0365 BITSLSTDATCommon mask table number which is inputted from SLS
Line (00-0F)1B
0366 BITKLINADR
BIT PASS BY VLS LINE
Nothing「0000」, Existence「023C」
BITKLSTDAT(S30:369)
BITKLINCNT(S30:368)
1W
0368 BITKLINCNTByte number which is going to be inputted from
BITKLINCNT.1B
0369 BITKLSTDATCommon mask table number which is inputted from SLS
Line (00-0F)1B
036A PATSLINADR
PATTERN PASS
Nothing「0000」, Existence「00FE」
PATPSMDAT(S30:37E)
PATSLSTDAT(S30:36C)
1W
036C PATSLSTDATCommon Mask Table number (00-0F) which is going to be
copied by PATPSMDAT.8B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 107 -
ADRS SYMBOL DESCRIPTION SIZE
0374 PATKLINADR
PATTERN PASS BY SUPERVISOR PANEL.
NOTHING「0000」, EXISTENCE「0242」
PATPSM2DAT(S30:800)
PATKLSTDAT(S30:376)
1W
0376 PATKLSTDATCOMMON Mask Table NUMBER WHICH IS GOING TO BE COPIED
OF PATPSM2DAT (00-0F).8B
037E PATPSMDAT Set 8 type of pattern table and make bit "1" of pass floor. 80B
03CE OPESTDATCommon Mask Table Number(00-0F) which is going to be
copied of PATPSM2DAT8B
03D6 LNFADDAT FULL ADVANCED VALUE ACCORDING TO SILENT OPERATION. 1W
03D8 LNL80CDAT 80 CS LOCATION VALUE ACCORDING TO SILENT OPERATION. 1W
03DA SRN80CDAT
As general-purpose inverter applies like MRL for short
run operation, Convert and input the distance of speed
reduction as pulse value for N operation.
1W
03DD TIMPASDAT SET ONLY 「00」 1B
03DE MSKCOMDAT
MASK CHOICE DATABit0- General CAR CALL register prohibition.Bit1- General HALL CALL register prohibition.Bit2- General CAR CALL CANCELBit3- General HALL CALL CANCELBit4- For Handicapped person CAR CALL register prohibitionBit5- For handicapped person HALL CALL register prohibitionBit6- For handicapped person CAR CALL CANCELBit7- For handicapped person HALL CALL CANCEL
16B
03EE ANASORTTBL Status broadcasting output INDEX 8B
0406 ANPOSDATTBL Broadcasting data for every floor from underground 5 floor. 80B
0456 CGODNLENGTH CHIME ON Location Value in DN operation 1W
0458 CGOUPLENGTH CHIME ON Location Value in UP operation 1W
045ACARSEG
DATTBLCAR DIGITAL Indicate DATA 100DW
05EAHALLSEG
DATTBLHALL DIGITAL Indicate DATA 100DW
077A SPFDAT Special floor and Appointed floor Input (If it is not, input 00) 3B
077D HEVFLRDAT Input as Bit which is converted from HEAVY DOOR(Non service is included.) 10B
0787 EXPZONNMB 1B
0788 EQUDSDAT
Input {(The highest floor location + The lowest floor
location)/2} as low speed operating direction choice in
high speed operation zone.
1W
078A EXPDAT 40W
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 108 -
ADRS SYMBOL DESCRIPTION SIZE
07DC RSTCUDLDAT Set as pulse value in rescue operation of up of stop position. 1B
07DD RSTCDDLDAT Set as pulse value in rescue operation of down of stop position. 1B
07E0 OPEPSFADR
PASS by EEPROM
Set EEPROM address which is included Pass Data
OPESTDAT(S30:3CE)
8DW
0800 PATPSM2DAT Set 8 type of pattern table and make bit "1" of pass floor. 80B
0900 ZONDAT
ZONE DATA
(It is data to occur EEPROM and indicate service in every floor.)
TYP FLR DSP
0900
0903
0906
~
TYP 0 : Crossed, TYP 1 : SERVICE
TYP 2 : NON SERVICE, TYP 3 : EXPRESS
1B
09F0 GPOSROM
Make the lowest floor data 0뭓0100 and Set each
absolute floor to pulse value.
(Distance/Pulse Rate = DATA = DATA[H])
80W
0A90 TOPSPEED Set regular speed to minute speed 1W
0A94 LOADOFFSetting of {(300/regular loading [Kg]뭓100뭓16}value.
(Set OFFSET concerning regular speed to [%] Value)1W
0A96 LOADOFF0 Set Bias value concerning weight signal '0'(Fixed value 300[Kg]) 1W
0A98 FULLLOAD
Set regular loading value as KG units
- 750Kg(11persons) : 02EE, - 900Kg(13persons) : 0384
-1000Kg(15persons) : 03E8, -1150Kg(17persons) : 047E
-1350Kg(20persons) : 0546, -1600Kg(24persons) : 0640
-1800Kg(27persons) : 0708, -2000Kg(30persons) : 07D0
1W
0A9A FLOADDATSet a full house sensing load value (%)
In case of 3WLS sensing, it is 100%(64H).1B
0A9B NHLFLR HOME LANDING floor 1B
0A9C NPAKFLR PARKING floor 1B
0A9E NRSQFLR Rescue operation shelter floor 1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 109 -
ADRS SYMBOL DESCRIPTION SIZE
0A9F NRFGFLR Temperature, Self-generation, Fire control shelter floor 1B
0AA0 GNDFLRUnderground data for indicate POSITION = (Number of
underground floor)+1 ≤61B
0AA1 EXITFLR
Set the floor which is installed of emergency exit in
high speed operation zone.
(It is 4 numbers include false image)
4B
0AA5 GRPCARNMB Set GROUP operation cars 1B0AA6 GCARNMB Set car number in GROUP (0 ≤GCARNMB ≤7) 1B
OAB8 EMGFADVDAT
In case more than 105M E/L emergency operation 90m/min DATA
EMGFADVDAT(SW30:AB8)
EMG80CDAT(SW30:ABA)1W
TM30B TM40S TM40E TM55B TM70C TM70A
0482 0460 0491 0476 0460 0483
OABA EMG80CDAT 02B0 028E 029C 1W
AEO
AE2DOOR TIME
1SEC=0064, 2SEC=00C8, 3SEC=012C, 4SEC=0190
5SEC=01F4, 6SEC=0258, 7SEC=02BC, 8SEC=0320
9SEC=0384, 10SEC=03E80B02 FANTDAT FAN OFF DELAY TIME 1W
0B04 LITTDAT LIGHT OFF DELAY TIME 1W
0B06 WSETDAT WIRE STRETCH Operation limit time [SEC] 1W
0B08 APASDT DT TIME ON AUTO PASS 1W
0B0C DODLTDAT DOOR OPEN DELAY TIME 1W
0B0E DCERTDAT Activate prohibit signal output waiting time.[SEC] 1W
0B10 DOERDAT DOOR OPEN ERROR CHECK TIME 1W
0B12 WLTTDAT WLT CHECK TIME 1W
0B14 DOXTDAT OPEN extension time[SEC] 1W
0B16 EFLTDAT DT TIME which stops each floor [10mS units](Basic 5 sec=01F4H) 1W
0B18 NUDTDAT CLOSE Promotion waiting time [SEC] 1W
0B1A PAKTDAT After landing PAK Appointed floor DT TIME 1W
0B1C 1W
0B1E DOM1TDATEnter opening time extension when handicapped person
call is not existed CHECK TIME[10mS]1W
0B20 DOM2TDATSet opening time extension when handicapped person
call is not existed.[10mS]1W
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 110 -
ADRS SYMBOL DESCRIPTION SIZE
0B22 DOM4TDATEnter opening time extension when handicapped person
call is not existed CHECK TIME[10mS]1W
0B24 DOM5TDATSet opening time extension when handicapped person
call is not existed CHECK TIME[10mS]1W
0B26 DOM6TDATSet opening time extension when handicapped person
call is existed CHECK TIME[10mS]1W
0B28 ARDTDATMaximum available operation time whih battery in
landing operation.[SEC]1W
0B2C General CAR CALL 1W
0B2E General HALL CALL 1W
0B30 General CAR,HALL CALL 1W
0B32 For handicapped person CAR CALL 1W
0B34 For handicapped person CAR + General CAR,HALL CALL 1W
0B36 For handicapped person CAR + General HALL CALL 1W
0B38 For handicapped person CAR + General CAR CALL 1W
0B3A For handicapped person HALL CALL 1W
0B3C For handicapped person HALL + General CAR CALL 1W
0B3E For handicapped person HALL + General HALL CALL 1W
0B40 For handicapped HALL + General CAR,HALL CALL 1W
0B42 For handicapped CAR,HALL CALL 1W
0B44 For handicapped CAR,HALL + General CAR CALL 1W
0B46 For handicapped CAR,HALL + General HALL CALL 1W
0B48 For handicapped CAR,HALL + General CAR,HALL CALL 1W
0B4C POWER ON DT TIME : 5 Sec「01F4」 1W
0B51 JAMTIMDATHALL CALL JAM CHECK TIME
「00」2min,「01」3min,「02」4min,「03」5min1B
0B52 EDLKTDAT Time [SEC] 1W
0B54 EXRUNTDAT EXPRESS Section Operation Time (Maximum Section operation standard)[SEC] 1W
0B58 HLTDAT After Normal landing , it is waiting time[SEC] 1W
0B5C SPFTDAT When it is stopped appointed floor : DOOR TIME 1W
0B68 RCKTDATIt is set RETIRE-CAM which is needed to supply according to initial
extra electricity and it is set to Hex value by 10mS units1W
0B70 KREGTDAT Car call register maintain time for 1.5 sec 1W
0B78 DTVIP DT TIME when you are answered VIP call 1W
0B7A DC3TDAT Enforcement DOOR CLOSE for 3 Min [SEC] 1W
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 111 -
ADRS SYMBOL DESCRIPTION SIZE
0B7C EFLTMS Each floor stop start minute 1B
0B7D EFLTHS Each floor stop start hour 1B
0B7E EFLTME Each floor stop finish minute 1B
0B7F EFLTHE Each floor stop finish hour 1B
0B80 PAKTMS PAK Start minute 1B
0B81 PAKTHS PAK Start hour 1B
0B82 PAKTME PAK Start minute 1B
0B83 PAKTHE PAK Start hour 1B
0B90 HSETTIM Waiting time until entering Economical MODE 1W
0B94 LDCLTTME DCLT Restart Waiting time[SEC] 1W
0B96 AUTDCTME Automatic Door closing waiting time[SEC] 1W
0B98MASTKEY
RSTTIMDAT0.6 Sec 1W
0BDC HLDSADR Front PHOTO-CELL Input ADDRESS Setting (Unused 0000) 1W
0BDE BHLDSADR Back PHOTO-CELL Input ADDRESS Setting(Unused 0000) 1W
0BE0 FPOSADRFloor awareness data is going to output setting
serial address For HALL DOOR CONTROLLER (Unused 0000)1W
0BE2 UPDORCADR
HALL DOOR CONTROLLER CONTROL Output ADDRESS Setting
Operating prohibition signal -- (BIT0)
DOOR-ZONE Signal -- (BIT1)
1W
0C00 EXMSKTBLEmergency service floor setting (CAR CALL MASK)
-Emergency exit is included10B
0C0A EXMSKTBLEmergency service floor setting(HALL CALL DN
MASK)-Include emergency exit10B
0C14 EXMSKTBLEmergency service floor setting (HALL CALL UP
MASK)-Include emergency exit10B
0C1E SFMSKTBL Service floor setting(CAR CALL MASK) -Include emergency exit 10B
0C28 SFMSKTBL Service floor setting(HALL CALL DN MASK) -Include emergency exit 10B
0C32 SFMSKTBL Service floor setting(HALL CALL UP MASK) -Include emergency exit 10B
0C3C SRUFNMB Sum of FLR which has TYP=1 of ZONDAT 1B
0C3D BOTFLR Underground floor of Service 1B
0C3E TOFLR The highest floor except for express zone 1B
0C3F GTOPFLR Sum of FLR which has total of ZONDAT 1B
0C40 DSPTOPFLR DISPLAY Floor number 1B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 112 -
ADRS SYMBOL DESCRIPTION SIZE
0C41 TBLNDAT CALL DATA TABLE Number setting on basic of C3F 1B
0D82 CFPZDAT CAR FLOOR POSITION DATA which middle location of each floor 80W
0EC2 DSPZDAT Middle location DATA for indicate floor when it is in PD-SET 80W
0F9E DOTFLOOR Set floor data to indicate of DOT DISPLAY Device 45B
1001 SIDEDAT
Door direction is decided to each floor
「00」Installed only Front DOOR
「00」Installed only back DOOR
「00」Installed both side of door
80B
1050 SVPSEGTBL Supervisor DIGITAL SEGMENT DATA setting from 5th underground 100W
1118 APASFLR AUTO PASS floor setting 8B
2038~
21F7SLSTLCTBL SLS LIVE ADDRESS TABLE 456B
2238~
23F7VLSTLCTBL VLS LIVE ADDRESS TABLE 456B
2400 SFMAX2Address number setting which to accept hall call from
HCU {(HCU Last response address) - 0뭓010F + 1}
2538~
25F7ELSTLCTBL ELS LIVE ADDRESS TABLE 456B
2942 VIPCIDX
VIP car is indicated according to each bit
bit0:A car(0:Unused, 1:Used)
bit1:B car(0:Unused, 1:Used)
1B
2944~
2952VIPINADR
Setting up SLS Address (16 Bit data) until VIP Call
is inputted as number of 8.
Setting up 0000 when n+1 is coming in sequence of n.
8W
2954~
295BVIPINFLR
Through SLS address which is installed by vipinadr
make set of call floor location.(floor type 4). It is
correspond to vipinadr as one to one.
8W
3000 FMAXOperating floor when two cars are crossed service
floor included express zone (TYPE3)1B
3001 SFMAXOperating floor when two cars are crossed service
floor included emergency exit (TYPE4)1B
3002 ECCAR
For handicapped person car is indicated to "1" each bit
1Bbit 7 6 5 4 3 2 1 0
Car H G F E D C B A
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 113 -
ADRS SYMBOL DESCRIPTION SIZE
3003 CARCIDXCAR INDEX(Car recognizing number)
A Car 「00」, B Car「01」1B
3004
~
3143
FLIGHTTIM
Unit for seconds which takes time to pass N floors.
It is used to calculate Arrival estimated time.
al×60flighttim[n]=6 + --------- ×(n-1)
1000×v
But, 1 ≤n ≤fmax×2
v : Regular speed[m/min]
al: Average distance of floor [mm]
160W
3144
~
3193
FCHG34
It is a table to convert from floor type3 to type4.
Set passing floor is 0.
In case of service floor:1 ≤fchg34[n] ≤sfmax
80B
3194 XFLOORX floor value to allocate HALL CALL.
(CAR near floor and FLOOR number)1B
3196 YTIMEEstimated limit time to allocate cars in
operation[SEC]1W
3198 TLIMIT
It is basic time to allocate 2 cars if hall call is
not serviced on time. [SEC]
fmax<20 : tlimit = 60[sec]
fmax ≥20 : tlimit = 90[sec]
1W
319A ABTMCFLRLower floor number by itself(type3)
1 ≤abtmcflr<fmax1B
319B ATOPCFLRA upper floor number by itself (type3)
2 ≤atcpcflr ≤fmax1B
319C BBTMCFLRLower floor number by another car (type3)
1 ≤bbtmcflr<fmax1B
319D BTOPCFLRA upper floor number by another car(type3)
2 ≤btcpcflr ≤fmax1B
319E
~
31A7
CDNCMASK
Common down CALL service zone table
Setting up the service floor bit to 1 for crossing 2
cars make down call(type 4)10B
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 114 -
ADRS SYMBOL DESCRIPTION SIZE
31A8
~
31B1
CUPCMASK
Common up CALL service zone table
Setting up the service floor bit to 1 for crossing 2
cars make up call(type 4)
10B
31B2
~
31BB
AWDNCMASKSetting up the service floor to 1 which is down call
for itself (type 4)10B
31BC
~
31C5
AWUPCMASKSetting up the service floor to 1 which is up call
for itself (type 4)10B
31C6
~
31CF
BWDNCMASKSetting up the service floor to 1 which is down call
for another car (type 4)10B
31D0
~
31D9
BWUPCMASKSetting up the service floor to 1 which is up call
for another call (type 4)10B
31DA EASSOPF
2cars for Handicapped person Call allocation Choice
Mode
「00」Priority service for handicapped person car in
case of handicapped call.
「01」General call which inputted Handicapped person
call is serviced by for handicapped person car.
「02」It is allocated by rule (Priority service for
handicapped person)
1B
3F40
~
3F8F
DSPFLRDATLocation indicate output of car of LHIB(SHIB)
DATA:85,84~81,01,02~4B80B
S10:
35EALOAD-TEST
「01」1WLS Normal operation when it is inputted
signal
「F=4」Function cancel
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 115 -
(4) Floor DISPLAY DATA
FLRADD DATA ADD DIGITAL DATA LDM DATA ADD DATA
LHIB(SHIB) CAR HALL CAR & HALL CAR HALL SVP
B5 3F40 85 45A 5EA 00,02,FF,ED 00,00,00,85 00,00,85,00 1050 FF,ED
B4 3F41 84 45E 5EE 00,02,FF,E6 00,00,00,84 00,00,84,00 1052 FF,E6
B3 3F42 83 462 5F2 00,02,FF,CF 00,00,00,83 00,00,83,00 1054 FF,CF
B2 3F43 82 466 5F6 00,02,FF,DB 00,00,00,82 00,00,82,00 1056 FF,DB
B1 3F44 81 46A 5FA 00,02,FF,06 00,00,00,81 00,00,81,00 1058 FF,06
1 3F45 01 46E 5FE 00,00,00,30 00,00,00,01 00,00,01,00 105A 00,30
2 3F46 02 472 602 00,00,00,DB 00,00,00,02 00,00,02,00 105C 00,DB
3 3F47 03 476 606 00,00,00,CF 00,00,00,03 00,00,03,00 105E 00,CF
4 3F48 04 47A 60A 00,00,00,E6 00,00,00,04 00,00,04,00 1060 00,E6
5 3F49 05 47E 60E 00,00,00,ED 00,00,00,05 00,00,05,00 1062 00,ED
6 3F4A 06 482 612 00,00,00,FD 00,00,00,06 00,00,06,00 1064 00,FD
7 3F4B 07 486 616 00,00,00,07 00,00,00,07 00,00,07,00 1066 00,07
8 3F4C 08 48A 61A 00,00,00,FF 00,00,00,08 00,00,08,00 1068 00,FF
9 3F4D 09 48E 61E 00,00,00,EF 00,00,00,09 00,00,09,00 106A 00,EF
10 3F4E 0A 492 622 00,00,06,3F 00,00,00,0A 00,00,0A,00 106C 06,3F
11 3F4F 0B 496 626 00,00,06,06 00,00,00,0B 00,00,0B,00 106E 06,06
12 3F50 0C 49A 62A 00,00,06,DB 00,00,00,0C 00,00,0C,00 1070 06,DB
13 3F51 0D 49E 62E 00,00,06,CF 00,00,00,0D 00,00,0D,00 1072 06,CF
14 3F52 0E 4A2 632 00,00,06,E6 00,00,00,0E 00,00,0E,00 1074 06,E6
15 3F53 0F 4A6 636 00,00,06,ED 00,00,00,0F 00,00,0F,00 1076 06,ED
16 3F54 10 4AA 63A 00,00,06,FD 00,00,00,10 00,00,10,00 1078 06,FD
17 3F55 11 4AE 63E 00,00,06,07 00,00,00,11 00,00,11,00 107A 06,07
18 3F56 12 4B2 642 00,00,06,FF 00,00,00,12 00,00,12,00 107C 06,FF
19 3F57 13 4B6 646 00,00,06,EF 00,00,00,13 00,00,13,00 107E 06,EF
20 3F58 14 4BA 64A 00,00,DB,3F 00,00,00,14 00,00,14,00 1080 5B,3F
21 3F59 15 4BE 64E 00,00,DB,06 00,00,00,15 00,00,15,00 1082 5B,06
22 3F5A 16 4C2 652 00,00,DB,DB 00,00,00,16 00,00,16,00 1084 5B,DB
23 3F5B 17 4C6 656 00,00,DB,CF 00,00,00,17 00,00,17,00 1086 5B,CF
24 3F5C 18 4CA 65A 00,00,DB,E6 00,00,00,18 00,00,18,00 1088 5B,E6
25 3F5D 19 4CE 65E 00,00,DB,ED 00,00,00,19 00,00,19,00 108A 5B,ED
26 3F5E 1A 4D2 662 00,00,DB,FD 00,00,00,1A 00,00,1A,00 108C 5B,FD
27 3F5F 1B 4D6 666 00,00,DB,07 00,00,00,1B 00,00,1B,00 108E 5B,07
28 3F60 1C 4DA 66A 00,00,DB,FF 00,00,00,1C 00,00,1C,00 1090 5B,FF
29 3F61 1D 4DE 66E 00,00,DB,EF 00,00,00,1D 00,00,1D,00 1092 5B,EF
30 3F62 1E 4E2 672 00,00,CF,3F 00,00,00,1E 00,00,1E,00 1094 4F,3F
40 3F6C 28 50A 69A 00,00,E6,3F 00,00,00,28 00,00,28,00 10A8 66,3F
☞ Option Data : S30:33C(Hall), S30:33D(Car) = 01
Rom Data Check: 00637(Hall), 00C07(Car)
201=0F, 205=05, 227=08, "B"=80, "M"=90, "L"=A0, "LL"=AA,
"G"=B0, "R"=C0, "-"=D0, "F"=E0, "PH"=F0, "P"=65
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 116 -
(5) CAR Status indicate device
Symbol Address Size IDX DESCRIPTION
DSPAPITBL
(Index value is
inputted as
sequence of
output data's
bit)
16B
0 UNUSED PORT INDEX
207 1 DOWN OPERATION LAMP INDEX
206 2 UP OPERATION LAMP INDEX
205 3 IND LAMP INDEX
203 4 EXCESS WEIGHT LAMP INDEX
202 5 PARKING LAMP INDEX
6 DOOR OPEN LAMP INDEX
7 DOOR TIME EXTENSION LAMP INDEX
8 EMERGENCY POWER LAMP INDEX
9 EARTHQUAKE LAMP INDEX
A MACHINE ROOM TEMPERATURE CONTROL LAMP INDEX
B FIRE LAMP INDEX
204 C FIRE OPERATION OF 1 AND 2 LAMP INDEX
D BS-FIREMAN LAMP INDEX
E EMERGENCY OPERATION LAMP INDEX
201 F STOP LAMP INDEX
10 FD LAMP INDEX
11 LAMP INDEX(SINGLE-AUTO) IN USING
12 ARD LAMP INDEX
(6) HALL STATUS INDICATE DEVICE
Symbol Address Size IDX DESCRIPTION
DSPAP3TBL
(Index value is
inputted as
sequence of
output data's
bit)
16B
0 UNUSED PORT INDEX
228 1 DOWN OPERATION LAMP INDEX
229 2 UP OPERATION LAMP INDEX
3 AUTO LAMP INDEX
4 IND LAMP INDEX
5 PARKING LAMP INDEX
6 PASS LAMP INDEX
7 FIRE OPERATION OF 1, 2 LAMP INDEX
227(LDM) 8 STOP LAMP INDEX
9 NSC LAMP INDEX
A SC LAMP INDEX
B JC LAMP INDEX
C FD LAMP INDEX(GENERAL CAR)
C LAMP INDEX(FREIGHT ) IN USE
D FIREMAN LAMP INDEX
E FIRE CONTROL LAMP INDEX
F ATT LAMP INDEX
227(LCORY) 10 INS LAMP INDEX
11 LAMP INDEX(SINGLE-AUTO) IN USE
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 117 -
(7) SVP Condition indicate device
Symbol Address Size IDX DESCRIPTION
SPVLMPIDXTBL
(Index value is
inputted as
sequence of
output data's
bit)
16B
0 UNUSED PORT INDEX
274 1 DOWN DIRECTION LAMP INDEX
273 2 UP DIRECTION LAMP INDEX
275 3 RUN LAMP INDEX
276 4 PARK LAMP INDEX
27B 5 IND LAMP INDEX
285 6 ATT LAMP INDEX
286 7 INS LAMP INDEX
277 8 FIRE LAMP INDEX FOR 1, 2
27A 9 RETURN LAMP INDEX
280 C CALL BACK LAMP INDEX
281 D ARD OPERATION LAMP INDEX
282 E A FULL HOUSE LAMP INDEX
283 F AUTOMATIC LAMP INDEX
284 10 CRT ON LAMP INDEX
12 WAITING LAMP INDEX
28B 13FIRE CONTROL ARRIVAL COMPLETE
LAMP INDEX28C 14 FIRE CONTROL LAMP INDEX
28D 15 EMERGENCY POWER ARRIVAL COMPLETE LAMP INDEX
28E 16 EMERGENCY POWER CONTROL LAMP INDEX
28F 17TEMPERATURE CONTROL ARRIVAL
COMPLETE LAMP INDEX290 18 TEMPERATURE CONTROL LAMP INDEX
291 19EARTHQUAKE CONTROL ARRIVAL
COMPLETE LAMP INDEX292 1A EARTHQUAKE CONTROL LAMP INDEX
1B EMERGENCY POWER LEVEL LANDING LAMP INDEX
1C EMERGENCY POWER OPERATION LAMP INDEX
1F BREAK OPENING LAMP INDEX
20 FIREMAN LAMP INDEX
21 DOOR OPEN BTN LAMP INDEX
22 NEAREST FLOOR ARRIVAL LAMP INDEX
23 BASIC FLOOR ARRIVAL LAMP INDEX
279 24 BREAKDOWN LAMP INDEX
278 25 VIP LAMP INDEX
289 26 DOOR CLOSE LAMP INDEX
27C 27 EP LAMP INDEX
27D 28 NP LAMP INDEX
29 CBS2
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 118 -
(8) ROM DATA ACCORDING AS CHANGING FLOOR
FLO
ORSADD DATA
ADDRESS
SERVICEFLOOR
INDICATEFLOOR
CAR CALL DN HALL CALL UP HALL CALL
NUMBEROFHCU
SERVICE
FLOOR
THEHIGHESTFLOOR(1)
THEHIGHESTFLOOR(2)
THEHIGHESTFLOOR(3)
FLOORMOD
901 902C00 C01 C02 CO3 C0A C0B C0C C0D C14 C15 C16 C17
2400 C3C C3E C3F C40 C41C1E C1F C20 C21 C28 C29 C2A C2B C32 C33 C34 C35
1F 210F 01 01 01 01 00 00 00 00 00 00 00 00 00 00 00 01 01 01 01 01
01
2F 2110 01 02 02 03 00 00 00 02 00 00 00 01 00 00 00 02 02 02 02 02
3F 2111 01 03 03 07 00 00 00 06 00 00 00 03 00 00 00 03 03 03 03 03
4F 2112 01 04 04 0F 00 00 00 0E 00 00 00 07 00 00 00 04 04 04 04 04
5F 2113 01 05 05 1F 00 00 00 1E 00 00 00 0F 00 00 00 05 05 05 05 05
6F 2114 01 06 06 3F 00 00 00 3E 00 00 00 1F 00 00 00 06 06 06 06 06
7F 2115 01 07 07 7F 00 00 00 7E 00 00 00 3F 00 00 00 07 07 07 07 07
8F 2116 01 08 08 FF 00 00 00 FE 00 00 00 7F 00 00 00 08 08 08 08 08
9F 2117 01 09 09 FF 01 00 00 FE 01 00 00 FF 00 00 00 09 09 09 09 09
02
10F 2118 01 0A 0A FF 03 00 00 FE 03 00 00 FF 01 00 00 0A 0A 0A 0A 0A
11F 2119 01 0B 0B FF 07 00 00 FE 07 00 00 FF 03 00 00 0B 0B 0B 0B 0B
12F 211A 01 0C 0C FF 0F 00 00 FE 0F 00 00 FF 07 00 00 0C 0C 0C 0C 0C
13F 211B 01 0D 0D FF 1F 00 00 FE 3F 00 00 FF 0F 00 00 0D 0D 0D 0D 0D
14F 211C 01 0E 0E FF 3F 00 00 FE 7F 00 00 FF 1F 00 00 0E 0E 0E 0E 0E
15F 211D 01 0F 0F FF 7F 00 00 FE FF 00 00 FF 3F 00 00 0F 0F 0F 0F 0F
16F 211E 01 10 10 FF FF 00 00 FE FF 00 00 FF 7F 00 00 10 10 10 10 10
17F 211F 01 11 11 FF FF 01 00 FE FF 01 00 FF FF 00 00 11 11 11 11 11
03
18F 2120 01 12 12 FF FF 03 00 FE FF 03 00 FF FF 01 00 12 12 12 12 12
19F 2121 01 13 13 FF FF 07 00 FE FF 07 00 FF FF 03 00 13 13 13 13 13
20F 2122 01 14 14 FF FF 0F 00 FE FF 0F 00 FF FF 07 00 14 14 14 14 14
21F 2123 01 15 15 FF FF 1F 00 FE FF 1F 00 FF FF 0F 00 15 15 15 15 15
22F 2124 01 16 16 FF FF 3F 00 FE FF 3F 00 FF FF 1F 00 16 16 16 16 16
23F 2125 01 17 17 FF FF 7F 00 FE FF 7F 00 FF FF 3F 00 17 17 17 17 17
24F 2126 01 18 18 FF FF FF 00 FE FF FF 00 FF FF 7F 00 18 18 18 18 18
25F 2127 01 19 19 FF FF FF 01 FE FF FF 01 FF FF FF 00 19 19 19 19 19
04
26F 2128 01 1A 1A FF FF FF 03 FE FF FF 03 FF FF FF 01 1A 1A 1A 1A 1A
27F 2129 01 1B 1B FF FF FF 07 FE FF FF 07 FF FF FF 03 1B 1B 1B 1B 1B
28F 212A 01 1C 1C FF FF FF 0F FE FF FF 0F FF FF FF 07 1C 1C 1C 1C 1C
29F 212B 01 1D 1D FF FF FF 1F FE FF FF 1F FF FF FF 0F 1D 1D 1D 1D 1D
30F 212C 01 1E 1E FF FF FF 3F FE FF FF 3F FF FF FF 1F 1E 1E 1E 1E 1E
31F 212D 01 1F 1F FF FF FF 7F FE FF FF 7F FF FF FF 3F 1F 1F 1F 1F 1F
32F 212E 01 20 20 FF FF FF FF FE FF FF FF FF FF FF 7F 20 20 20 20 20
* S30:210F ~ : STOP according to SET.EX) In case of 10 STOP : Set From 210F to 2118
* S30:AA0 = Set number from underground floor to first floor.(Maximum 06)EX) Without underground : 01H, B3,B2,B1,1,2,3 ~ : 04H
* S30:C3D = The lowest service floor* The highest floor(1) : The highest service floor(Except for EXPRESS)* The highest floor(2) : The highest floor of building (Include EXPRESS)* The highest floor(3) : The highest DISPLAY floor (include EXPRESS)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 119 -
(9) Speed/TM TYPE PATTERN DATA(MNCU)
symbol DESCRIPTION addCurrent
settingFactory setting
Contr
ol
range
NL80CS 80CS 0230m/min 45m/min 60m/min 90m/min 105m/min
210H 2BCH 300H 320H 400H
NFADDATFULL
ADVANCE
TM30B
00
5F2H 3FBH 456H 515H 593H
TM40E 5F2H 3FBH 466H 54EH 5CDH
TM55B 5F2H 417H 488H 674H 5ACH
TM70C 5F2H 3EEH 488H 53CH 58FH
Speed
ADD
30M 45M 60M 90M 105M
40E 30B 40E 55B 30B 40E 55B 30B 40E 55B 30B 40E 55B
0000 05F2 0417 03FB 0417 0456 0466 0488 053D 054E 0574 0593 05CD 05AC
0002 0200 02BC 02BC 02BC 0300 0300 0300 0320 0320 0320 0380 0380 0380
0004 05B1 03CB 03D0 03E8 02CC 02D9 02FF 01E5 01FA 0208 01A2 01B4 01AA
0006 097D 0652 065A 0683 04AA 04BF 04FB 0329 034C 0363 02B9 02D7 026C
0008 0D48 08D9 08E4 091E 06B7 06A4 06D8 046D 049D 04BE 03D0 03FA 03E2
000A 1113 0B60 0B6F 0BB9 0865 088A 08CD 05B0 05EF 0619 04E7 1D05 04FE
000C 14DF 0DE7 0DF9 0E54 0A42 0A6F 0AC1 06F4 0740 0774 05AE 0640 061A
000E 18AA 106F 1083 10EE 0C20 0C55 0CB6 0837 0892 08CF 0715 0763 0736
0010 1C76 12F6 130E 1389 0DFD 0E3B 0EAA 097B 09E3 0A2A 082C 0886 0852
0012 2041 157D 1598 1624 0FDB 1021 109F 0ABF 0B35 0B85 0943 09A9 096E
0014 240D 1804 1822 18BF 11B8 1206 1294 0C02 0C87 0CE0 0A5A 0ACC 0A8A
0016 27D8 1A8B 1AAD 1B5A 1396 13EC 1488 0D46 0DD8 0E3B 0B71 0BEF 0BA6
0018 2BA3 1D12 1D37 1DF4 1573 15D2 167D 0EB9 0F2A 0F96 0087 0D12 0CC2
001A 2F6F 1F9A 1FC1 208F 1750 17B7 1871 0FCD 107B 10F0 0D9E 0E35 0DDE
001C 333A 2221 224C 232A 192E 199D 1A66 1110 11CD 124B 0E85 0F58 0EFA
001E 3706 24A8 24D6 25C5 1B0B 1B83 1C5D 1254 131E 13A6 0FCC 107B 1016
0020 3AD1 272F 2761 2860 1CF9 1D69 1E4F 1398 1470 1501 10E3 119D 1132
0022 3E9C 29B6 29EB 2AFB 1EC6 1F4E 2044 14D8 15C1 165C 11FA 12C0 124E
0024 4268 2C3D 2C75 2D95 20A4 2134 2238 161F 1713 17B7 1311 13E3 136A
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 120 -
SPEED
ADD
30M 45M 60M 90M 105M
40E 30B 40E 55B 30B 40E 55B 30B 40E 55B 30B 40E 55B
0026 4633 2EC4 2F60 3030 2281 231A 242D 1762 1864 1912 1428 1506 1486
0028 49FF 314C 3184 32CB 2454 24FF 2621 18A6 19B6 1A6D 153F 1629 15A2
002A 4DCA 33D3 3414 3566 263C 26E5 2816 19E9 1B07 1BC8 1656 174C 16BE
002C FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF FFFF
0100 000F 000A 000A 000B 0008 0008 0008 0005 0006 0006 0005 0005 0005
0102 FFF1 FFF6 FFF6 FFF5 FFF8 FFF8 FFF8 FFFB FFFA FFFA FFFB FFFB FFFB
0104 0092 0061 0062 0064 0048 0049 004B 0031 0033 0034 002A 002C 002B
0106 00CA 008C 0088 008C 006F 0071 0074 007D 007F 0082 0072 0077 0074
0108 0031 0020 0021 0021 0018 0018 0019 0010 0011 0011 000E 000F 000E
010A 0228 0178 0171 017B 013D 0142 014C 015C 0163 016D 0146 0153 014C
010C 00C2 0081 0082 0085 005F 0061 0064 0041 0044 0045 0038 003A 0039
010E FF3E FF7F FF7F FF7B FF01 FF9F FF9C FFBF FFBC FFBB FFC8 FFC6 FFC7
0110 00C2 0081 0082 0085 005F 0061 0064 0041 0044 0045 0038 003A 0039
0112 0032 0032 0032 0032 0032 0032 0032 0032 0032 0032 0032 0032 0032
0114 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000
0116 0123 00C2 00C3 00C3 008F 0092 0096 0061 0065 0068 0054 0057 0085
0118 0061 0041 0041 0043 0030 0031 0032 0020 0022 0023 001C 001B 001C
011A 00C2 0081 0082 0085 005F 0061 0064 0041 0044 0045 0038 003A 0039
0120 00C2 0081 0082 0085 005F 0061 0064 0041 0044 0045 0038 003A 0039
0122 0067 009B 009A 0096 00D1 00CE 00C8 00D1 0128 0120 0167 0158 0160
0456 05B1 03CB 03D0 03E8 02CC 02D9 02EF 01E5 01FA 0208 01A2 01B4 01AA
0458 05B1 03CB 03D0 03E8 02CC 02D9 02EF 01E5 01FA 0208 01A2 01B4 01AA
07DC 0C 27 27 28 1D 1D 1E 13 14 15 11 11 11
07DD 0C 27 27 28 1D 1D 1E 13 14 15 11 11 11
1.03 1.55 1.54 1.50 2.09 2.06 2.00 2.09 2.96 2.88 3.59 3.44 3.52
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 121 -
(10) DY20 GOVERNOR PG DATA(MNCU)
3.96mm DATA 5mm DATA 10mm DATA
ADD SYMBOL 105M 90M 60M 45M 30M
W30:0000 NFADDAT 50C 415 249 199 18C
0002 ML80CDAT 32B 26F 18C 111 085
0004 SRNCHKDAT 17A
0006 27E
0008 373
000A 470
000C 56C
000E 669
0010 765
0012 862
0014 95E
0016 A5B
0018 B58
001A C5C
001C D51
001E E4D
0020 F4A
0022 1046
0024 1143
0026 123F
0028 133C
002A 1438
002C
ADD SYMBOL 105M 90M 60M 45M 30M
W30:0000 NFADDAT 400 33C 1D0 144
0002 ML80CDAT 283 1EE 13A D9
0004 SRNCHKDAT 12C
0006 1FA
0008 2BC
000A 384
000C 44C
000E 514
0010 5DC
0012 6A4
0014 76C
0016 834
0018 8FC
001A 9CA
001C A8C
001E B54
0020 C1C
0022 CE4
0024 DAC
0026 E74
0028 F3C
002A 1004
002C FFFF
ADD SYMBOL Over 120M
W30:0000 NFADDAT 21C
0002 ML80CDAT 1C0
0004 SRNCHKDAT 95
0006 F9
0008 15C
000A 1C0
000C 223
000E 287
0010 2EA
0012 34E
0014 3B1
0016 414
0018 478
001A 4DB
001C 53F
001E 4A2
0020 606
0022 669
0024 6CD
0026 730
0028 794
002A 7F7
002C
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 122 -
0100 UAMEVAL 4
0102 DAMEVAL FFFC
0104 IADLDAT 25
0106 ADSTODAT 67 61 3A 36 36
0108 APAMDAT C
010A SLDDLDAT 127 10E 6C 5C 4C
010C DZUAMEVAL 32
010E DZDAMEVAL FFCE
0110 CPAMEVAL 32
0112 PDCHKDAT 3F
0116 LVCDAT 4B
0118 ROPEDEFMAX 19
011A DZLNG 32
0120 AMEMAX 32
0122 PLSRATE 18C
0456 CGODNLENGTH 17A
0458 CGOUPLENGTH 17A
30:07DC LSTCUDLDAT 0F
03:07DD RSTCUDLDAT 0F
SWD000
:EARMNRATE 130
0100 UAMEVAL 3
0102 DAMEVAL FFFD
0104 IADLDAT 1E
0106 ADSTODAT 52 4D 2E 2B
0108 APAMDAT A
010A SLDDLDAT EA D6 56 49
010C DZUAMEVAL 28
010E DZDAMEVAL FFD8
0110 CPAMEVAL 28
0112 PDCHKDAT 32
0116 LVCDAT 3C
0118 ROPEDEFMAX 14
011A DZLNG 28
0120 AMEMAX 28
0122 PLSRATE
0456 CGODNLENGTH 12C
0458 CGOUPLENGTH 12C
30:07DC LSTCUDLDAT 0C
03:07DD RSTCUDLDAT 0C
SWD000
:EARMNRATE 130
0100 UAMEVAL 3
0102 DAMEVAL FFFD
0104 IADLDAT F
0106 ADSTODAT 3C
0108 APAMDAT 5
010A SLDDLDAT 63
010C DZUAMEVAL 14
010E DZDAMEVAL FFEC
0110 CPAMEVAL 14
0112 PDCHKDAT 32
0116 LVCDAT 3C
0118 ROPEDEFMAX 5
011A DZLNG 63
0120 AMEMAX 14
0122 PLSRATE
0456 CGODNLENGTH 17A
0458 CGOUPLENGTH 17A
30:07DC LSTCUDLDAT 0F
03:07DD RSTCUDLDAT 0F
SW30
:0AB8EMGFADVDAT 0
0ABA EMGL80CDAT 0
002C-
0052FFFF
0054-
00F20
WD000:
EARMNRATE 130
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
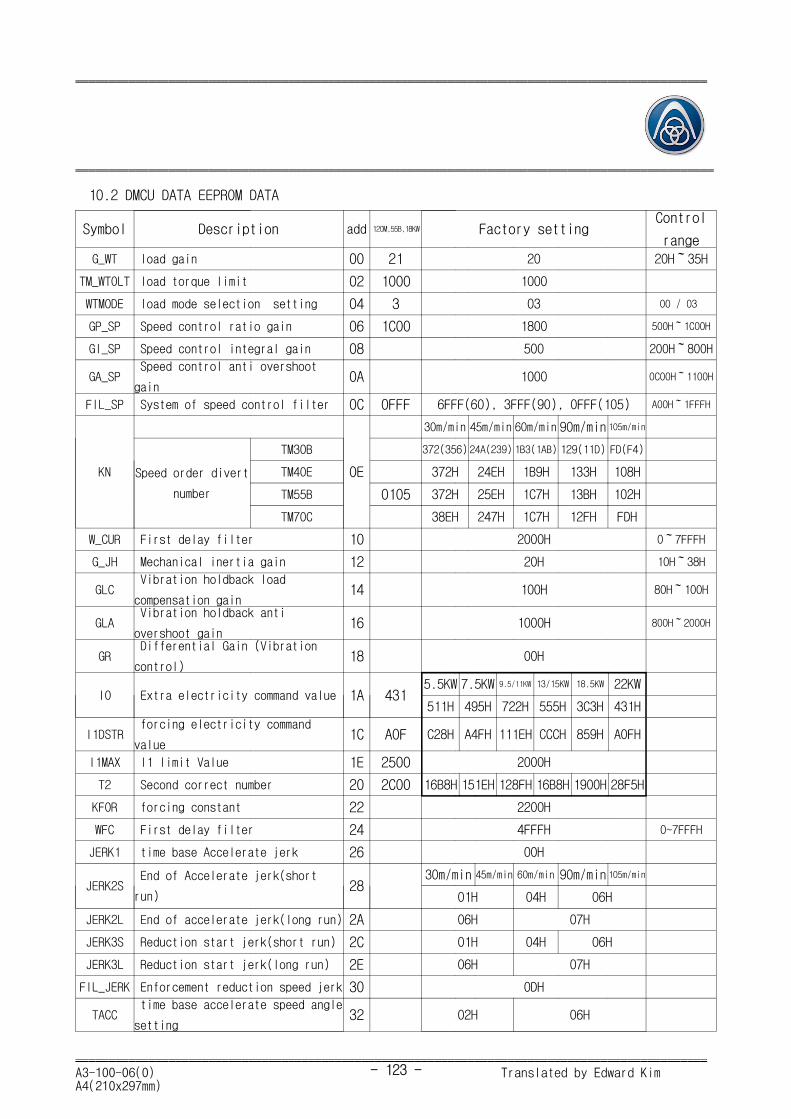
- 123 -
10.2 DMCU DATA EEPROM DATA
Symbol Description add 120M,55B,18KW Factory settingControl
rangeG_WT load gain 00 21 20 20H~35H
TM_WTOLT load torque limit 02 1000 1000
WTMODE load mode selection setting 04 3 03 00 / 03
GP_SP Speed control ratio gain 06 1C00 1800 500H~1C00H
GI_SP Speed control integral gain 08 500 200H~800H
GA_SPSpeed control anti overshoot
gain0A 1000 0C00H~1100H
FIL_SP System of speed control filter 0C 0FFF 6FFF(60), 3FFF(90), 0FFF(105) A00H~1FFFH
KN OE
30m/min 45m/min 60m/min 90m/min 105m/min
Speed order divert
number
TM30B 372(356) 24A(239) 1B3(1AB) 129(11D) FD(F4)
TM40E 372H 24EH 1B9H 133H 108H
TM55B 0105 372H 25EH 1C7H 13BH 102H
TM70C 38EH 247H 1C7H 12FH FDH
W_CUR First delay filter 10 2000H 0~7FFFH
G_JH Mechanical inertia gain 12 20H 10H~38H
GLCVibration holdback load
compensation gain14 100H 80H~100H
GLAVibration holdback anti
overshoot gain16 1000H 800H~2000H
GRDifferential Gain (Vibration
control)18 00H
IO Extra electricity command value 1A 4315.5KW 7.5KW 9.5/11KW 13/15KW 18.5KW 22KW
511H 495H 722H 555H 3C3H 431H
I1DSTRforcing electricity command
value1C AOF C28H A4FH 111EH CCCH 859H A0FH
I1MAX I1 limit Value 1E 2500 2000H
T2 Second correct number 20 2C00 16B8H 151EH 128FH 16B8H 1900H 28F5H
KFOR forcing constant 22 2200H
WFC First delay filter 24 4FFFH 0~7FFFH
JERK1 time base Accelerate jerk 26 00H
JERK2SEnd of Accelerate jerk(short
run)28
30m/min 45m/min 60m/min 90m/min 105m/min
01H 04H 06H
JERK2L End of accelerate jerk(long run) 2A 06H 07H
JERK3S Reduction start jerk(short run) 2C 01H 04H 06H
JERK3L Reduction start jerk(long run) 2E 06H 07H
FIL_JERK Enforcement reduction speed jerk 30 0DH
TACCtime base accelerate speed angle
setting32 02H 06H
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 124 -
LSP_ACCMinimum pattern
Acclerate/Reduction speed setting34 02H REFERENCE
TO DACC
TBLTDECtime base reduction speed angle
setting36 00H 03H
DDECDistance base reduction speed
setting38 00H 04H
FSL_DECDEnforcement reduction speed
angle setting3C 0DH
Refer to
DEC
symbol DESCRIPTION add 120M,55B,18KW Factory settingAdjustmen
t range
INSRATE INS speed setting 3E 08H(16M/MIN)Refet to
DACC
KTS INS pattern filter 40 4FFFHRefer to
INSSPD
LRATEStructural operation spedd
setting42
Silent
operation
04
00H 00H 02H 03H 03H Refer to
DRATE TBLRATE Regulation speed setting 44 00H 01H 02H 03H 04H
VLLP04HMinimum pattern setting in low
speed46 0FFH(12.75M/MIN)
0~FFH
LSP_FLTminimum pattern of first delay
filter48 00H
FCMP short run comparision bias 4A 50 00H 2BH 80H
CMPGshort run inspection
compensation gain4C 20H
DBIA advance distance bias setting 4E F0H F0H F0H F0H
VDBIADistance base pattern bias
setting50 90 A0H
ARD SPEED ARD speed setting 52 0CH 00~0CH
WSR_LNDLanding pattern limit value setting in wire
stretch54 20H(7.2M/MIN) 00~90H
SDRL E/L speed SDRL value setting 56 96H(7.5M/MIN)
SDRM0 E/L speed SDRM value setting 58 300 190H(20M/MIN) 258H(30M/MIN) 300H
SDRH0 E/L speed SDRH value setting 5A 870 21CH 32AH 438H 654H 762H90% of
regular
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 125 -
※ SWD000:5A address SETTING method
- Complete PATTERN adjustment.
- Check landing condition from the lowest floor to
highest floor.
- Read segment value on the set of 2F004 of MNCU
rotary switch (EX U230).
- Read segment value on the set of 2F014 of MNCU
rotary switch (EX U205).
In case of this, 0530 is the speed of 5LS location.
- Read segment value on the set of 2F024 of MNCU
rotary switch (EX U240).
- Read segment value on the set of 2F034 of MNCU
rotary switch (EX U205).
In case of this, 0540 is the speed of 6LS location.
- Input the large number between 0530 and 0540 +
60H(5m/min) to SWD000 : 5A address. (0540 + 60 =
05A0)
MFD_REFSpeed gap setting of FR and
FRREF5C 300 190H(20M/MIN) 2D0H(36M/MIN)
MSTY_LMT mmsty on delay time setting 5E 7DH
symbol DESCRIPTION add 120M,55B,18KW Factory settingAdjustmen
t Range
BKT_LMT bkt off delay time setting 60 64H
MCLCK_LMT mclck on delay time setting 62 19H
64Before DMCU-3C =00 / After
DMCU-3F =01
LED_CNT led flickering time setting 68 40H
RES_WAIT sdrdy wait time setting 6A 3F02H
DA1ADD da1 output address setting 6C OC 0AH
A01,A02
Output ADDR.
and GAIN
DA1GAIN da1 output gain setting 6E 3000H
DA2ADD da2 output address setting 70 14 0CH
DA2GAIN da2 output gain setting 72 400 3000H
LSSOPF lss option flag setting 74 0001HSilent
operation
LRATE2Emergency operation speed
setting76 00H 01H 02H 03H
Refer to DRATE
TBL
NO LOAD UP load gain in
operation.82 15H(A field adjustment)
NO LOAD DN load gain in
operation.84 30H(A field adjustment)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 126 -
FULL LOAD UP load gain in
operation.86 30H(A field adjustment)
FULL LOAD DN load gain in
operation.88 15H(A field adjustment)
8E
(Auto=00//Manual=01)
After setting of 01H, adjust
reduction pattern PATTERN
After complete adjustment, set 00H.
START TORQUE BOOST 90
5.5kW/7.5kW = 200H
9.5kW/15kW = 180H
18.5kW/30kW = 100H
UG_LND Landing gain setting in UP A2 100H 0~1FFH
DG_LND Landing gain setting in Down A4 100H 0~1FFH
VLDADFL Landing flag setting A6 00H
VLDCMPData value setting if Landing
pattern is changed.A8 0000H 0~7FFFH
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 127 -
symbol CONTENTS add 120M,55B,18KW FACTORY SETTINGAdjustmen
t range
KTS1 The first delay of Speed reference filter AA 180H 0~7FFFH
SFCTSF Inertia system flag setting AC 000H
KLND
Landing command
conversion number
SETTING
B6 28
30m/min 45m/min 60m/min 90m/min 105m/min
TM30B 0DH 13H 1AH 27H 2DH
TM40E 0DH 13H 1AH 27H 2DH
TM55B 0DH 13H 1AH 27H 2DH
TM70C 0DH 13H 1AH 27H 2DH
RE_DIS
Landing start
POINT DATA
SETTING(200mm)
TM30B
B8 1F70
679DH 4503H 32EDH 2281H 1DCOH
TM40E 679DH 4503H 32EDH 2400H 1F06H
TM55B 679DH 4503H 3566H 2502H 1E4AH
TM70C 679DH 4459H 3566H 238BH 1DB7H
LUDCMP
After 1u and ld
off, 15mm movement
data setting
TM30B
BA 25B
7C5H 52DH 3D2H 296H 23BH
TM40E 7C5H 52DH 3D2H 2B3H 254H
TM55B 7C5H 52DH 401H 2C6H 246H
TM70C 7C5H 52DH 401H 2AAH 23AH
LUDBRK
After 1u and ld
off, 17mm movement
data setting
TM30B
BC 24C
8CFH 5DDH 454H 2EFH 287H
TM40E 8CFH 5DDH 454H 30FH 2A3H
TM55B 8CFH 5DDH 48AH 325H 293H
TM70C 8CFH 5CFH 48AH 305H 287H
AMCX_LMT amcx on delay time setting BE 007DH
NUD_LMT nud on delay time setting C0 0271H
SPE_LMT spe on delay time setting C2 000CH
FRDY2_LMT frdy2 on delay time setting C4 000AH
DCT_LMT dct on delay time setting C6 0013H
CCC_LMT ccc on delay time setting C8 0271H
1BK_LMT 1bk on delay time setting CA 000CH
AMCE_LMT amce on delay time setting CC 00BBH
BCER_LMT bcer on delay time setting CE 007DH
BOER_LMT boer on delay time setting D0 007DH
INSER_LMT ins err on delay time setting D2 007DH
XAMCE_LMT xamce on delay time setting D4 007DH
VDSE_LMT vdse on delay time setting D6 3E 0177H
VDSCK_LMT vdsck on delay time setting D8 00FAH
FAN_LMT fan off delay time setting DA 0EA6H
STD1_LMT std1 on delay time setting DC 03E8H
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 128 -
symbol CONTENTS add 120M,55B,18KW FACTORY SETTING RANGE
STD2_LMT std2 on delay time setting DE 01F4H
TH_LMT th on/off delay time setting E0 00FAH
LNDZ_LMT lndz off delay time setting E2 007DH
LZIH_LMT lzih off delay time setting E4 0006H
ZSR0 zero speed inspection value setting E6 003CH(3M/MIN)
CCCTR_LMT ccc trip limit data setting E8 09C4H
RMNRATE
Left distance
bias number
(Be careful when you
use Governer P.G )
EA 300
30m/min 45m/min 60m/min 90m/min 105m/min
Governer P.G
5mm = 130H
10mm = 300h
TM30B 4FH 77H A0H EDH 114H
TM40E 4FH 76H 9EH E3H 108H
TM55B 4FH 73H 9AH DDH 10EH
TM70C 4FH 78H 9AH E6H 114H
RLVDATLrelevel low data
setting
TM30B
EC 20
06H 09H 0BH 11H 14H
TM40E 06H 08H 0BH 10H 14H
TM55B 06H 08H 0BH 10H 13H
TM70C 05H 09H 0BH 11H 14H
RLVDATM
relevel middle
data
setting
TM30B
EE 60
13H 1DH 27H 38H 42H
TM40E 13H 1DH 27H 36H 40H
TM55B 13H 1CH 25H 35H 42H
TM70C 13H 1DH 25H 39H 43H
RLVDATHrelevel high data
setting
TM30B
F0 B0
30H 48H 61H 8DH A6H
TM40E 30H 47H 5FH 89H 9FH
TM55B 30H 45H 5CH 85H A3H
TM70C 2EH 48H 5CH 8BH A6H
W1WLS 110% load data setting F2550Kg 600 750 900 1000 1150 1350 1600
0100HW3WLS 90% load data setting F4 132 0100H
W4WLS 70% load data setting F6 0198H
W5WLS 50% load data setting F8 28B 0200H
W6WLS 30% load data setting FA 2F0 0200H
W8WLS 150kg load data setting FC 2FF 02CDH
NLOAD no load data setting FE 180 02FFH
GI_SP_LOW Integral gain value setting until sdrl 102 200 0180H 100~GI_SP
NLUDATStart weight compensation when
it is up of the lowest floor.104 0200H(0~258H)
check in no
load
NLDDATStart weight compensation when
it is dn of the lowest floor.106 0200H(0~258H)
FLUDATStart weight compensation when
it is up of the highest floor.108 0200H(0~258H)
FLDDATStart weight compensation when
it is dn of the lowest floor.10A 0200H(0~258H)
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 129 -
SINGLE
- AUTO
MOROR :
30KW
TM : 125
speed :
30M/MIN
ROPING :
2:1
Signal ADDRESS DATA
MOTOR :
30KW
TM : 125
speed :
30M/MIN
ROPING :
2:1
Signal ADDRESS DATA
KN 0E 1BBH KN
JERK1 26 5H I0
KLND B6 18H I1DSTR
RE-DLS B8 684EH I1MAX
LUDCMP BA 7D2H T2
LUDBRK BC 8DCH RATE
RMNRATE EA 9EH KLND
RLVDATL EC 0BH RE-KIS
RLVDATM EE 27H LUDCMP
RLVDATH F0 5FH LUDBRK
RMNRATE
RLVDATL
RLVDATM
RLVDATH
Out of EEPROM DATA is follows
of 60M/MIN 22KW.
Out of EEPROM DATA is follows 60M/MIN
22KW. (Board volume setting included)
Speed :
105M/MIN
TM : 30B
Name of
signalADDRESS DATA
KN 0R FD
RLVDATL RV 14
RLVDATM RR 42
RLVDATH F0 A6
OutofEEPROMDATAisfollowsof60M/MIN 22KW.
Speed :
30M/MIN
TM : 30B
MOTOR :
22KW
ROPING :
2:1
Name of
signalADDRESS DATA
KN 0E 1BB
JERK1 26 05
KLND B6 18
RE-DLS B8 684E
LUDCMP BA 7D2
LUDBRK BC 8DC
Out of EEPROM DATA is follows
of 60M/MIN 22KW.
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
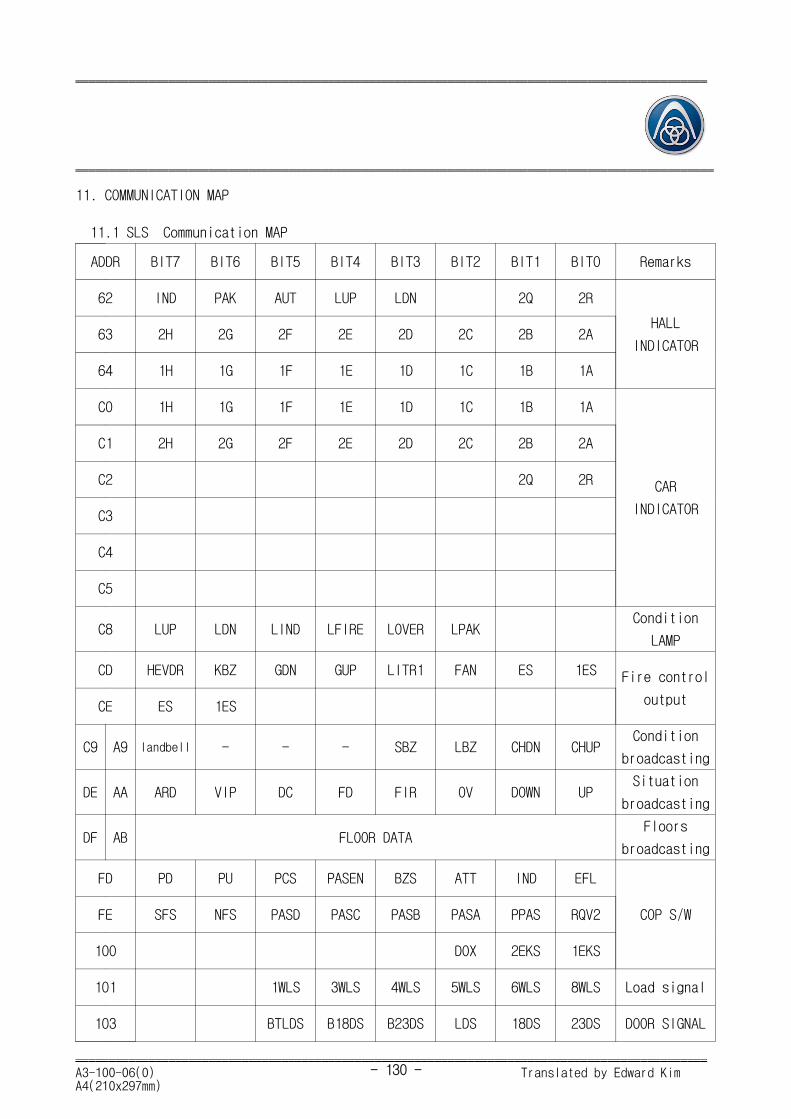
- 130 -
11. COMMUNICATION MAP
11.1 SLS Communication MAP
ADDR BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0 Remarks
62 IND PAK AUT LUP LDN 2Q 2R
HALL
INDICATOR63 2H 2G 2F 2E 2D 2C 2B 2A
64 1H 1G 1F 1E 1D 1C 1B 1A
C0 1H 1G 1F 1E 1D 1C 1B 1A
CAR
INDICATOR
C1 2H 2G 2F 2E 2D 2C 2B 2A
C2 2Q 2R
C3
C4
C5
C8 LUP LDN LIND LFIRE LOVER LPAKCondition
LAMP
CD HEVDR KBZ GDN GUP LITR1 FAN ES 1ES Fire control
outputCE ES 1ES
C9 A9 landbell - - - SBZ LBZ CHDN CHUPCondition
broadcasting
DE AA ARD VIP DC FD FIR OV DOWN UPSituation
broadcasting
DF AB FLOOR DATAFloors
broadcasting
FD PD PU PCS PASEN BZS ATT IND EFL
COP S/WFE SFS NFS PASD PASC PASB PASA PPAS RQV2
100 DOX 2EKS 1EKS
101 1WLS 3WLS 4WLS 5WLS 6WLS 8WLS Load signal
103 BTLDS B18DS B23DS LDS 18DS 23DS DOOR SIGNAL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 131 -
ADDR T/L SYMBOL Remarks ADDR T/L SYMBOL Remarks
38 58 T (Z)EDHL
Handicap Down
Hall Call Lamp
39 T SLSTRS M ⇒ S 59
3A HCU T (Z)UHL
Normal Up Hall
Call Lamp
5A
3B 55B
3C 5C
3D 5D
3E 5E
3F 5F
40 60
41 61
42 62 HALL T HSTSLI Situation lamp
43 63 8/16 T HDIGI
Hall Digital44 T (Z)DHL
Normal Down Hall
Call Lamp
64 8/16
45 65 16
46 66 16
47 67 LCU T LANTFLK Lantern blinking
48 68 T (Z)ULNT
Up Hall Lantern
49 69
4A 6A
4B 6B
4C 6C
4D 6D HCU
4E T (Z)EUHL
Handicap Up Hall
Call Lamp
6E
4F 6F
50 70
51 71
52 72 T (Z)DLNT
Down Hall Lantern
53 73
54 74
55 75
56 76
57 77
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
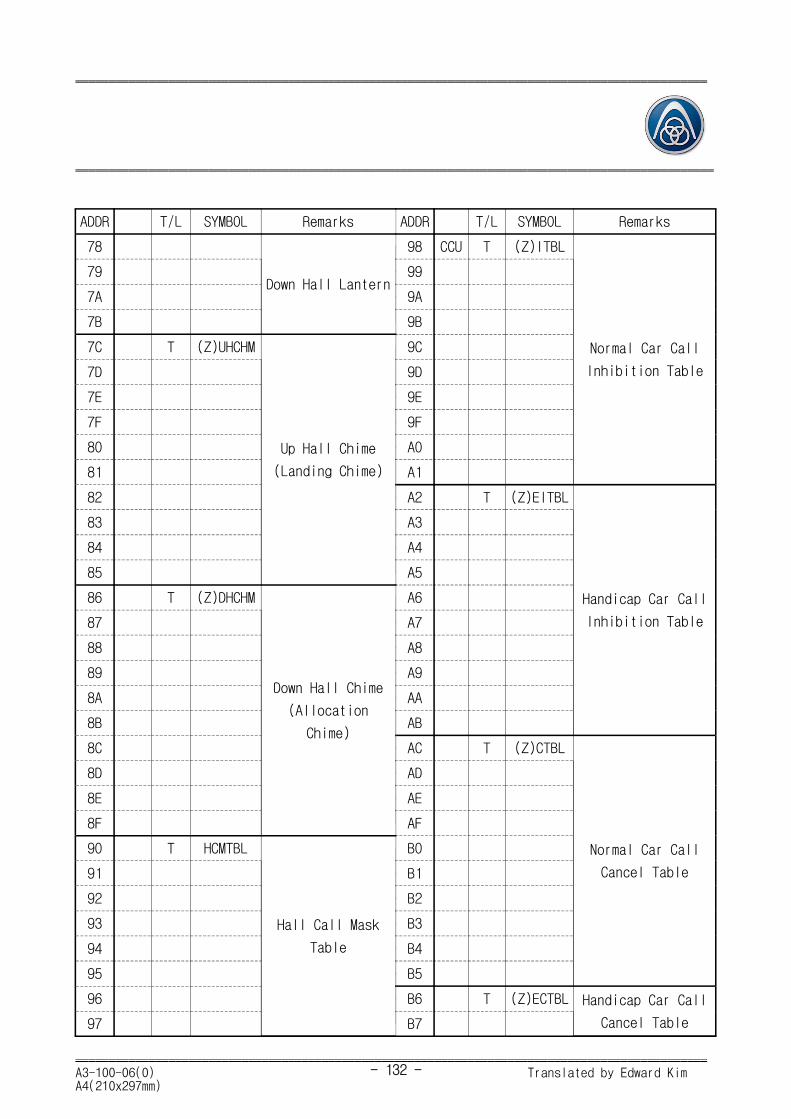
- 132 -
ADDR T/L SYMBOL Remarks ADDR T/L SYMBOL Remarks
78
Down Hall Lantern
98 CCU T (Z)ITBL
Normal Car Call
Inhibition Table
79 99
7A 9A
7B 9B
7C T (Z)UHCHM
Up Hall Chime
(Landing Chime)
9C
7D 9D
7E 9E
7F 9F
80 A0
81 A1
82 A2 T (Z)EITBL
Handicap Car Call
Inhibition Table
83 A3
84 A4
85 A5
86 T (Z)DHCHM
Down Hall Chime
(Allocation
Chime)
A6
87 A7
88 A8
89 A9
8A AA
8B AB
8C AC T (Z)CTBL
Normal Car Call
Cancel Table
8D AD
8E AE
8F AF
90 T HCMTBL
Hall Call Mask
Table
B0
91 B1
92 B2
93 B3
94 B4
95 B5
96 B6 T (Z)ECTBL Handicap Car Call
Cancel Table97 B7
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 133 -
ADDR T/L SYMBOL Remarks ADDR T/L SYMBOL Remark
B8
Handicap Car Call
Cancel Table
D8Position
Indicator
(AI Mode :
Destination floor
register Data)
B9 D9
BA DA
BB DB
BC DC
BD DD
BE DE T ANOUNCAutomatic
guidance
broadcastingBF DF
C0 8/16 T KDIGI
Car Digital
Display
E0 TLDM
informati
on
indicate
device
StatusaLamp1
C1 8/16 E1 StatusaLamp2
C2 8/16 E2 PositionData
C3 16sg E3 Operation Speed
C4 LCU T CARPST Car location output E4 HIB T
LDM-HIB
Low
electrici
ty
control
Data
Power Control
C5 LCU T FLRMAXOperation total
floorsE5 Time(H)
C6 T OPTF Option Flag E6 Time(L)
C7 T EKCCLRHandicapped
CallClearE7 T
STSL(Exten
sion)StatusaLamp1
C8 Car T STSL StatusLamp E8 StatusaLamp2
C9 E9 CCU L (Z)ENTBL
Normal Car Call
Entry Table
CA T KCCLR Car CallClear EA
CB LCU TIME Ltn and JAM EB
CC EC
CD T FC Fire Control ED
CE EE
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 134 -
CF T RCVINC LoopCounter EF
D0 F0
D1 SLSLPTRS F1
D2 VLSLPTRS F2
D3 SLS2LPTRS F3 L EENTBL
Handicap Car Call
Cancel Table
D4 CCU T POSIL
Position Indicator
F4
D5 F5
D6 F6
D7 F7
ADDR T/L SYMBOL Remarks ADDR T/L SYMBOL Remarks
F8
Handicap Car
Call
Cancel Table
118 10F
F9 119 11F
FA 11A 12F
FB 11B 13F
FC 11C 14F
FD L COPSW COP S/W 11D 15F
FE 11E 16F
FF 11F 17F
100 120 18F
101 L WEIGHT Car load signal 121 19F
102 L 122 20F
103 L DOOR Door Signal 123 21F
104 L JAMHANDI E-Btnjam ∼
105 L JAMNORM Normal JAM 15A 76F
106 L RTNINC LoopCounter 15B 77F
107 L KCINFLG CarCalllnFlag 15C 78F
108 L JAMREAR Rear JAM 15D 79F
109 15E 80F
10A 15F LLHD(A
caster)CRT Mode
10B 160 L CRT Data
10C 161 (LISTENER)
10D 162 〈SPARE〉
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 135 -
10E 163 (LISTENER)
10F HCU L Hall Call 1F 164
110 Button 2F 165
111 Input 3F 166
112 4F 167
113 5F 168
114 6F 169
115 7F 16A
116 8F 16B
117 9F 16C
ADDR T/L SYMBOL Remarks ADDR T/L SYMBOL Remarks
16D
16E
16F
170
171
172
173
174 L SLS2RCV S2 →M
175 L SLSACV S →M
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 136 -
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 137 -
11.2 VLS COMMUNICATION MAP
(1) Less application of MNCU IC12, 13 REV5.0
KCTL1 A T/L BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
SEQ : Step
operation
FDBZC : FD of CAGE
BUZZER CUT
RSQ : SIDE Rescue
operation
GLSS : Earthquake
low speed operation
VFIR : CRT
Supervisor fire
signal (Only
Guidance
broadcasting, E/L
normal operation)
BIT
PASS
23C L 8 7 6 5 4 3 2 1
23D L 16 15 14 13 12 11 10 9
23E L 24 23 22 21 20 19 18 17
23F L 32 31 30 29 28 27 26 25
240 L 40 39 38 37 36 35 34 33
CHECK 241 L CRT INCREMENT RETURN DATA
Control
(CRT)
242 L PS-C PS-B PS-A SFLS EFLS IND CBS PAK
243 L AFIR HLINH FIR EMN EDH EDM EDL GLSS
244 L RSQ FDBZC SEQ NP EP MGR RTN
Control
(LCI)
24C L PS-C PS-B PS-A SFLS EFLS IND CBS PAK
24D L AFIR HLING FIR EMN EDH EDM EDL GLSS
24E L RSQ FDBZC SEQ NP EP MGR RTN
24F L
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)
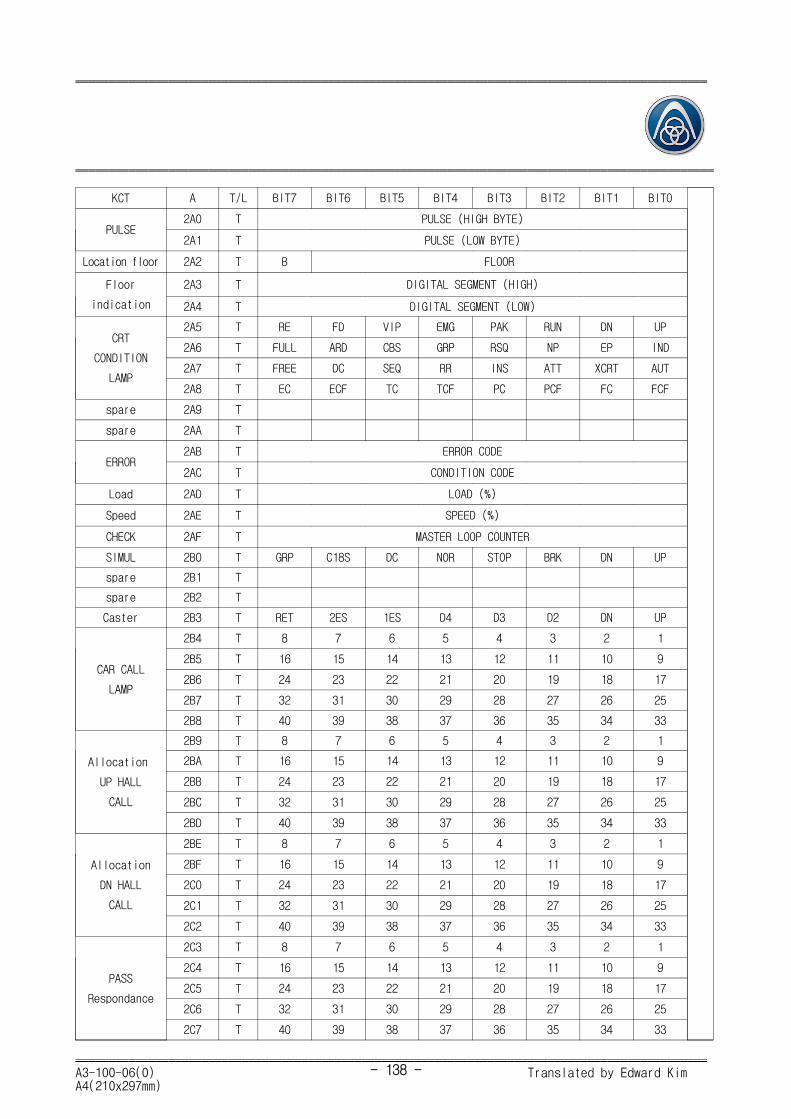
- 138 -
KCT A T/L BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
PULSE2A0 T PULSE (HIGH BYTE)
2A1 T PULSE (LOW BYTE)
Location floor 2A2 T B FLOOR
Floor
indication
2A3 T DIGITAL SEGMENT (HIGH)
2A4 T DIGITAL SEGMENT (LOW)
CRT
CONDITION
LAMP
2A5 T RE FD VIP EMG PAK RUN DN UP
2A6 T FULL ARD CBS GRP RSQ NP EP IND
2A7 T FREE DC SEQ RR INS ATT XCRT AUT
2A8 T EC ECF TC TCF PC PCF FC FCF
spare 2A9 T
spare 2AA T
ERROR2AB T ERROR CODE
2AC T CONDITION CODE
Load 2AD T LOAD (%)
Speed 2AE T SPEED (%)
CHECK 2AF T MASTER LOOP COUNTER
SIMUL 2B0 T GRP C18S DC NOR STOP BRK DN UP
spare 2B1 T
spare 2B2 T
Caster 2B3 T RET 2ES 1ES D4 D3 D2 DN UP
CAR CALL
LAMP
2B4 T 8 7 6 5 4 3 2 1
2B5 T 16 15 14 13 12 11 10 9
2B6 T 24 23 22 21 20 19 18 17
2B7 T 32 31 30 29 28 27 26 25
2B8 T 40 39 38 37 36 35 34 33
Allocation
UP HALL
CALL
2B9 T 8 7 6 5 4 3 2 1
2BA T 16 15 14 13 12 11 10 9
2BB T 24 23 22 21 20 19 18 17
2BC T 32 31 30 29 28 27 26 25
2BD T 40 39 38 37 36 35 34 33
Allocation
DN HALL
CALL
2BE T 8 7 6 5 4 3 2 1
2BF T 16 15 14 13 12 11 10 9
2C0 T 24 23 22 21 20 19 18 17
2C1 T 32 31 30 29 28 27 26 25
2C2 T 40 39 38 37 36 35 34 33
PASS
Respondance
2C3 T 8 7 6 5 4 3 2 1
2C4 T 16 15 14 13 12 11 10 9
2C5 T 24 23 22 21 20 19 18 17
2C6 T 32 31 30 29 28 27 26 25
2C7 T 40 39 38 37 36 35 34 33
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 139 -
(2) More than MNCU IC12, 13 REV5.0 application
KCTL1 A T/L BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0EQ : Step
operation
FDBZC : FD of
CAGE
BUZZER CUT
RSQ : SIDE
Rescue
operation
GLSS :
Earthquake low
speed operation
VFIR : CRT
Supervisor fire
signal (Only
Guidance
broadcasting,
E/L normal
operation)
BIT
PASS
23C L 8 7 6 5 4 3 2 1
23D L 16 15 14 13 12 11 10 9
23E L 24 23 22 21 20 19 18 17
23F L 32 31 30 29 28 27 26 25
240 L 40 39 38 37 36 35 34 33
CHECK 241 L CRT INCREMENT RETURN DATA
Control
(CRT)
242 L PS-C PS-B PS-A SFLS EFLS IND CBS PAK
243 L AFIR EMG FIR EMN EDH EDM EDL GLSS
244 L RSQ FDBC SEQ NP EP MGR RTN
Control
(LCI)
284 L PS-C PS-B PS-A SFLS EFLS IND CBS PAK
285 L AFIR EMG FIR EMN EDH EDM EDL GLSS
286 L RSQ FDBC SEQ NP EP MGR RTN
287 L EDH EDM EDL
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)

- 140 -
KCT A T/L BIT7 BIT6 BIT5 BIT4 BIT3 BIT2 BIT1 BIT0
PULSE2A0 T PULSE (HIGH BYTE)
2A1 T PULSE (LOW BYTE)
Location floor 2A2 T B FLOOR
Floor
indication
2A3 T DIGITAL SEGMENT (HIGH)
2A4 T DIGITAL SEGMENT (LOW)
CRT
Situation
LAMP
2A5 T RE FD VIP EMG PAK RUN DN UP
2A6 T FULL ARD CBS GRP RSQ NP EP IND
2A7 T FREE DC SEQ RR INS ATT XCRT AUT
2A8 T EC ECF TC TCF PC PCF FC FCF
spare 2A9 T
spare 2AA T
ERROR2AB T ERROR CODE
2AC T CONDITION CODE
Load 2AD T LOAD (%)
Speed 2AE T SPEED (%)
CHECK 2AF T MASTER LOOP COUNTER
SIMUL 2B0 T GRP C18S DC NOR STOP BRK DN UP
spare 2B1 T
spare 2B2 T
Caster 2B3 T RET 2ES 1ES D4 D3 D2 DN UP
CAR CALL
LAMP
2B4 T 8 7 6 5 4 3 2 1
2B5 T 16 15 14 13 12 11 10 9
2B6 T 24 23 22 21 20 19 18 17
2B7 T 32 31 30 29 28 27 26 25
2B8 T 40 39 38 37 36 35 34 33
Allocation
UP HALL
CALL
2B9 T 8 7 6 5 4 3 2 1
2BA T 16 15 14 13 12 11 10 9
2BB T 24 23 22 21 20 19 18 17
2BC T 32 31 30 29 28 27 26 25
2BD T 40 39 38 37 36 35 34 33
Allocation
DN HALL
CALL
2BE T 8 7 6 5 4 3 2 1
2BF T 16 15 14 13 12 11 10 9
2C0 T 24 23 22 21 20 19 18 17
2C1 T 32 31 30 29 28 27 26 25
2C2 T 40 39 38 37 36 35 34 33
PASS
Reference
2C3 T 8 7 6 5 4 3 2 1
2C4 T 16 15 14 13 12 11 10 9
2C5 T 24 23 22 21 20 19 18 17
2C6 T 32 31 30 29 28 27 26 25
2C7 T 40 39 38 37 36 35 34 33
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안
안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안안A3-100-06(0) Translated by Edward KimA4(210x297mm)