drt4all 2007 - inicio. envejecimiento en red. consejo...
TRANSCRIPT

II Congreso Internacional sobre
Domótica, Robótica y Teleasistencia para Todos
DRT4all 2007
EDITA:

II Congreso Internacional sobre
Domótica, Robótica y Teleasistencia para Todos
DRT4all 2007

© Fundación ONCE para la Cooperación e Integración Social de las Personas con Discapacidad. 2008. Edita: Fundación ONCE para la Cooperación e Integración Social de las Personas con Discapacidad. Supervisión de la edición: Comité Científico DRT4all: • D. Jesús Hernández Galán. Director de Accesibilidad e Fundación ONCE. • D. Enrique Varela Couceiro, Director del Departamento de Tecnologías Accesibles e I+D de Fundación ONCE • D. Carlos Egea García, Director de CEyAS y consultor externo de Fundación ONCE • D. Jaime López Krahe, Catedrático y Decano de la Facultad de Matemáticas, Informática y Tecnologías de la Universidad de
París 8 • D. Alejandro Rodríguez Ascaso, investigador del grupo aDeNu de la Universidad Nacional de Educación a Distancia (UNED) • D. Daniel Guasch Murillo, Director Académico de la Cátedra de Accesibilidad, Arquitectura, Diseño y Tecnología para Todos de
la Universidad Politécnica de Cataluña • D. Mike Duxbury, Director del Departamento de Accesibilidad para la Discapacidad de Vodafone, Reino Unido • D. Jesús García Fernández, Coordinador de la Oficina de W3C en España y responsable de la Unidad de Accesibilidad Web de
la Fundación CTIC • Dª. María Satur Torre Calero, Manager de Innovación, Fundación Vodafone España • D. Elías Morán de la Torre, Instructor Tiflotecnológico de Centro de Investigación, Desarrollo y Aplicación Tiflotécnica de la
ONCE ISBN: 84‐88934‐34‐3

ORGANIZA:
PATROCINAN:

Índice
Índice .................................................................................................................................... 1
Mesa inaugural ...................................................................................................................... 3
Tecnologías con sentido
D. Miguel Carballeda Piñeiro, Presidente de ONCE y Fundación ONCE .................................... 5
Aplicación APTRA. Adecuación de puestos de trabajo, recomendaciones y ayudas técnicas
María Josefa Álvarez Ilzarbe ...................................................................................................... 9
Ayuda robótica para la rehabilitación de miembros superiores
José Mª Sabater, J. Mª Azorín, C. Pérez, N. García y M. Menchón ........................................ 19
Domótica asistencial. Concepto y ejemplos
Rosa Mª Regatos Soriano ........................................................................................................ 29
Dispositivos hápticos: Una forma de realizar la interacción hombre‐máquina
Mary Monroy, María Oyarzabal, Manuel Ferre, Salvador Cobos, Jordi Barrio y Javier Ortego ................................................................................................................................................. 39
Experiencias de Fundación Vodafone España para el apoyo a las personas dependientes
Mari Satur Torre Calero y Puerto Asensio Collado .................................................................. 55
MAT II. Materiales de aprendizaje para todos (fase II)
Fundació per la Universitat Oberta deCatalunya y Fundosa Teleservicios ............................. 63
Aproximación a las necesidades de las TIC de las personas ciegas o con discapacidad visual. Integración mediante la innovación
José Manuel Azorín‐Albiñana .................................................................................................. 75
Los robots paralelos en la rehabilitación médica
José R. Serracín P., Roque Saltaren y Rafael Aracil ................................................................. 79
Proyecto educativo en Leganés, una Ciudad Digital
Virginia Moreno Bonilla ........................................................................................................... 89
Servicios de telecomunicación presentes y futuros universalmente accesibles
Julio Abascal ............................................................................................................................ 97
1

2
Servidor de procesos en Java para una instalación domótica EIB
Francisco Cilleruelo Trotter y Jorge Alva Alarcón .................................................................. 105
Silla de ruedas robótica para dar más independencia a su usuario
J. González, C. Galindo, J.A. Fernández, J.L. Blanco, A. Muñoz y V. Arévalo ........................ 117
Estudio sobre teléfonos parlantes. Entendimiento del mercado para usuarios ciegos y deficientes visuales
D. Sadek Wynberg Millward Brown ...................................................................................... 129
Interacción basada en webcam
Joaquín Fonoll y Ambrosio Gassol ......................................................................................... 145
Juguetes para todos
Flusidor, Carolina Moncada .................................................................................................. 159
Dondolio, Nuria Parrado ....................................................................................................... 161
Flip Flop Memory, Estefanía Maurey .................................................................................... 167
PlofPlof el tótem marino, Cristina Morales ........................................................................... 171
El papel de los usuarios ante las nuevas tecnologías para la diversidad
Javier Romañach, Mario Toboso, Elías Morán, Gonzalo Arjona, Javier Arroyo y Jorge Sánchez ............................................................................................................................................... 175
Iniciativas nacionales para fomentar la inclusión de todas las personas en la sociedad de la información y el conocimiento
Wendy Moreno ..................................................................................................................... 187
The role of evaluation of accessibility
Leonor Moniz Pereira ............................................................................................................ 193
Improvement and Assessment of Motor Rehabilitation with Control Engineering Methods
Michael Bernhardt, Heike Vallery, Herman van der Kooji, Martin Buss, and Albrecht Struppler ................................................................................................................................ 205
Privacy and functionality in the perspective of ambient intelligence and disability
Mathijs SOEDE ....................................................................................................................... 217
Development of Human‐Interactive Robot – RI‐MAN
Zhiwei Luo .............................................................................................. 229 , and Shinya Hirano

Mesa inaugural
Sra. Dña. Amparo Valcarce. Secretaria de Estado de Servicios Sociales, Familias y Discapacidad.
Sra. Dña. Concepción Guerra. Viceconsejera de Economía e Innovación Tecnológica de la Comunidad de Madrid.
Sr. D. Alberto Durán Vicepresidente 1º Ejecutivo de Fundación ONCE.
Sr. D. José Luis Ripoll. Director General de Fundación Vodafone España.
Sr. D. Jesús Hernández. Director de Accesibilidad de Fundación ONCE.
3

Tecnologías con sentido
Desde la Fundación ONCE, hemos tenido el placer de impulsar la segunda edición del Congreso Internacional de Domótica, Robótica y Teleasistencia para Todos que, gracias a la buena aceptación de la primera convocatoria y a la inestimable colaboración de las Administraciones Públicas, los patrocinadores y el amplio elenco de expertos que de una forma u otra se han implicado en el desarrollo de este singular Congreso, ha retomado con fuerza el objetivo que motivó este gran proyecto: universalizar el uso de las tecnologías y aprovechar las aplicaciones tecnológicas y científicas para impulsar la igualdad de oportunidades de todas las personas.
La Real Academia Española define la tecnología como “un conjunto de teorías y de técnicas que permiten el aprovechamiento práctico del conocimiento científico”. A tenor de dicha definición, la accesibilidad se presenta como una cualidad intrínseca a la propia tecnología que permite ampliar mercados y que, bien gestionada, podría ser la mejor prueba de su funcionalidad. No obstante, a pesar de que los beneficios de la accesibilidad universal son plausibles tanto para los usuarios, como para las empresas, como para la sociedad en su conjunto, en este terreno, todavía nos queda mucho por hacer y también por aprender.
En las últimas décadas, principalmente a partir de los 90 con la irrupción de Internet, la tecnología ha alcanzado cotas de influencia social, económica y cultural que han superado muchas de nuestras mayores expectativas. Pero el vertiginoso avance de la tecnología y de las comunicaciones no ha terminado. Es más, en áreas tan recientes como Internet, estamos muy lejos de aprovechar todas sus bondades y la pretendida universalidad de la Red de Redes no deja de ser una promesa utópica. No hay que irse a los países subdesarrollados para comprobar que Internet es todavía una desconocida; en los países desarrollados, no todos los ciudadanos tienen acceso a ella (muchos por motivos perfectamente superables).
Las nuevas tecnologías abarcan un espectro tan amplio de campos tecnológicos y científicos que las aplicaciones mal diseñadas, causantes de muchos problemas que ya agrupamos bajo el común denominador de brecha digital (principalmente por su dificultad de uso, por la carencia de criterios de diseño y por la incompatibilidad entre dispositivos), no disminuyen, sino que aumentan exponencialmente.
De entre las múltiples tecnologías emergentes que surgen casi cada día en nuestra sociedad tecnificada, hay tres grupos que consideramos pueden tener una gran importancia para el mejor desenvolvimiento de las personas con discapacidad en su vida diaria, en sus actividades laborales, en su autonomía y, en definitiva, en su plena integración social como son la domótica, la robótica y la teleasistencia.
Domótica
Semáforos acústicos, automatización de luces, sistemas de detección de presencia, seguridad electrónica (alarmas y sensores de fugas de gas, agua etc.), motorización de puertas, ventanas y persianas, programación de electrodomésticos, sistemas de riego y un largo etcétera pueden considerarse englobados en la inteligencia ambiental donde, como es lógico, no falta la informática, centro neurálgico de este avance científico.
5

Si bien, las aplicaciones domóticas siguen siendo minoritarias, dada la carestía de las mismas, son patentes las ventajas que pueden aportar al colectivo de personas con discapacidad y al de personas mayores. Además, el gran abanico de equipos que pueden ser integrados en el hogar, en edificios y en el propio entorno (desde un grifo con detección de manos para ahorro de agua hasta una cámara de seguridad motorizada; desde un detector de gas hasta un horno con control remoto), junto con la heterogeneidad de estándares que garanticen la plena, rápida y sencilla integración de todos ellos en un punto, siguen siendo barreras que obstaculizan su aplicación por parte del ciudadano medio.
Robótica
La ciencia ha hecho posible la automatización de máquinas −no necesariamente con formas
humanas o humanoides− que, dotadas de ‘inteligencia’ aplicada, son capaces de realizar labores difíciles o imposibles para el hombre.
Desde vehículos robotizados que exploran los planetas y máquinas robotizadas que participan de forma activa en los procesos industriales a robots domésticos que, con las adaptaciones pertinentes, pueden ayudar a personas dependientes, cuidar de bebés e, incluso, realizar tareas educativas y de ocio.
El abanico de aplicaciones de la robótica es prácticamente ilimitado y su futuro pasa necesariamente por su uso combinado con los servicios de teleasistencia.
Teleasistencia
La teleasistencia engloba tecnologías, equipos y servicios tecnológicos encargados del cuidado a distancia de la salud de las personas.
Desde la monitorización a distancia de las constantes vitales de un paciente, evaluación de análisis clínicos, el establecimiento de sistemas de alarmas ante recaídas de salud, diagnósticos por videoconferencia y multitud de aplicaciones, en el ámbito sanitario y fuera de él, son ejemplos ilustrativos de las tecnologías que se agrupan bajo este campo, aún en fase inicial.
El valor de la autonomía
Es evidente que un hogar altamente domotizado, con todos sus servicios automatizados, puede considerarse un lujo para determinadas personas; pero también es cierto que, para aquellos cuyos movimientos están limitados, una casa de este tipo puede suponerles la diferencia entre ser o no ser independientes y eso es una oportunidad que una sociedad como la nuestra no puede dejar pasar.
Un elemento robotizado con la inteligencia suficiente y los planos de una ciudad podría guiar a un ciego con mucha más precisión y seguridad que los actuales perros guía, así como acompañar y cuidar a personas mayores en sus desplazamientos. No obstante, la producción limitada y el consecuente alto precio de estas tecnologías hacen que el camino que hay que recorrer para que sean herramientas socialmente capaces y responsables sea aún largo.
Como el II Congreso Internacional de Domótica, Robótica y Teleasistencia para Todos ha puesto de manifiesto, es necesario que los expertos en estas materias, los usuarios con
6

discapacidad, así como de los productores, investigadores y fabricantes se impliquen de forma fehaciente para que el diseño universal se aplique en todos estos campos. A tal efecto –y así lo han revelado las conclusiones del Congreso–, existe ya un alto grado de concienciación y tanto usuarios como expertos comienzan ya a participar en los futuros desarrollos. Esperemos que este inequívoco deseo de compartir conocimientos y experiencias vivido por todos los participantes del Congreso siga incrementándose y que, entre todos, podamos dotar de sentido a la tecnología y a ese mundo mejor que todos deseamos construir.
D. Miguel Carballeda Piñeiro
Presidente de ONCE y Fundación ONCE
7

Aplicación APTRA. Adecuación de puestos de trabajo, recomendaciones y ayudas técnicas
María Josefa Álvarez Ilzarbe Técnico de la Dirección de Accesibilidad de Fundación ONCE
En las empresas, a la hora de abordar la incorporación de trabajadores con deficiencias12
y que tienen el certificado de minusvalía , entre otras muchas cuestiones, surge una que se convierte en pieza clave: La carencia de conocimiento de los profesionales de los departamentos de recursos humanos sobre lo que estos posibles trabajadores pueden hacer.
Esta y otras carencias de conocimiento son, normalmente, las que llevan a que en nuestra cultura, todavía hoy, se asocie deficiencia (minusvalía, discapacidad...) con INCAPACIDAD –así en mayúsculas‐; es decir, a que se considere que las personas con deficiencias NO son CAPACES de realizar actividad alguna o que si las realizan lo hacen ineficientemente. Así, este prejuicio cultural trasladado al mundo laboral se convierte en un escollo para la integración en la empresa ordinaria de quienes tienen alguna deficiencia.
Para contribuir al conocimiento de una realidad diferente, una realidad cotidiana para miles de trabajadores, se ha elaborado esta sencilla herramienta.
NOTA: Para evitar confusiones se indica que esta aplicación en ningún caso debe ser utilizada para evaluar capacidades o para realizar selección de personal o para suplantar el análisis del puesto de trabajo cuando sea necesario o cuando deba aplicarse para cumplimiento de la legalidad vigente.
Proyecto APTRA
El proyecto “Adaptación de puestos de trabajo, recomendaciones y ayudas técnicas” (A.P.T.R.A.) es un proyecto de la Fundación ONCE para la cooperación e integración social de personas con discapacidad en colaboración, en diferentes momentos del mismo, con el Fondo Social Europeo –vía el Programa Operativo de Lucha contra la Discriminación‐ y con el Fondo Europeo de Desarrollo Regional. Se ha ido desarrollando con las empresas Fundosa Social Consulting, VÍA LIBRE y TECHNOSITE, así como con personal del GRUPO FUNDOSA y de la
1 Deficiencia: Según la Clasificación Internacional del Funcionamiento, de la Salud y la Discapacidad –CIF‐ de la Organización Mundial de la Salud es “la anormalidad o pérdida de una estructura corporal o de una función fisiológica. Las funciones fisiológicas incluyen las mentales. Con “anormalidad” se hace referencia estrictamente a una desviación respecto a la norma estadística establecida y sólo debe usarse en ese sentido.” 2 El certificado de minusvalía es un documento oficial, expedido por la Administración Pública, mediante el que se acredita, tras valoración multiprofesional, la existencia de deficiencia. Se denomina minusvalía al mantenerse la terminología anterior a la CIF, que entendía por tal la relación desfavorable con el entorno, los efectos negativos de la existencia de alguna deficiencia. El grado de minusvalía se expresa en porcentaje y se considera que existe minusvalía, a efecto de obtención de prestaciones y beneficios compensatorios, cuando se alcanza un grado igual o superior al 33 por 100 de la misma.
9

Dirección de Accesibilidad de la propia Fundación ONCE, correspondiendo la dirección del proyecto al Director de Accesibilidad de esta última. Se ha contado también con la colaboración de personal experto de las siguientes organizaciones: Organización Nacional de Ciegos Españoles –ONCE‐, Federación de Organizaciones a favor de Personas con Discapacidad Intelectual de Madrid ‐FEAPS Madrid‐ y Confederación Española de Agrupaciones de Familiares y Personas con Enfermedad Mental –FEAFES‐.
Los objetivos que se fijaron para el proyecto fueron:
• Analizar diversos entornos empresariales y variados puestos de trabajo ocupados por personas con discapacidad con la doble finalidad de mejorar la calidad de los puestos de trabajo e incrementar la productividad en las empresas.
• Compilar las experiencias positivas encontradas y las soluciones aportadas y ponerlas a disposición de los responsables de recursos humanos de las empresas, en particular, y de los agentes sociales en general a través de Discapnet.
• Elaborar una herramienta informática que, incorporada a Discapnet, se convierta en apoyo para la integración de personas con discapacidad en las empresas al aportar información y recomendaciones sobre la adecuación puesto‐trabajador ante posibles desajustes o dificultades.
El proyecto se desarrolló en distintas fases. En la primera, el trabajo pivotó en el Área de Recursos Humanos de la Fundación ONCE y del GRUPO FUNDOSA de manera que se asegurara la confidencialidad que exige la Ley Orgánica de Protección de Datos. Se seleccionaron cien puestos de trabajo en función del tipo de discapacidad de la persona que lo ocupaba, el porcentaje de discapacidad y el tipo de puestos.
Se seleccionaron y estudiaron, también, veinte centros de trabajo desde el punto de vista de la accesibilidad y aplicando la norma UNE 170000 de Accesibilidad Global. Los informes realizados recogieron las dificultades detectadas y las soluciones a implementar para resolverlas.
De los cien puestos de trabajo analizados, noventa se encontraban en empresas del GRUPO FUNDOSA y los diez restantes fueron contactados a través de FEAPS Madrid y de FEAFES. Los análisis se realizaron teniendo en cuenta diferentes métodos de evaluación basados en la ciencia ergonómica. En resumen en cada análisis se realizó una evaluación funcional que tenía en cuenta los requerimientos –demandas‐ de las tareas asociadas a las funciones de cada puesto y las capacidades de los trabajadores y se señalaron los desajustes existentes recogiendo la información de las adecuaciones que se hubieran utilizado o aportando las correspondientes recomendaciones a incorporar. Estas recomendaciones iban desde la incorporación de ayudas técnicas, incluyendo mobiliario, hasta modificaciones de entorno o de la organización del trabajo. También se incorporaron recomendaciones generales relacionadas con la salud laboral y/o la prevención de riesgos.
Para ser usado como apoyo en la aplicación y especialmente para dar una visión amplia de las posibilidades de contratación desde el primer momento, aunque no estaba previsto originalmente, se elaboró una lista de los puestos más demandados por las empresas en los
10

últimos años, basándose en el estudio de más de diez mil ofertas y en las clasificaciones nacional e internacional de ocupaciones. Los nombres y las funciones básicas de los puestos seleccionados fueron revisados para evitar la discriminación por género y para aumentar su funcionalidad.
Para el desarrollo de la aplicación y para su uso futuro también se elaboraron:
o Lista de demandas y capacidades: basada en la Clasificación Internacional del Funcionamiento y la Salud (CIF – OMS 2001).
o Catálogo de Ayudas Técnicas: Este catálogo irá creciendo y modificándose con el uso de la herramienta y la aparición/desaparición de productos en el mercado.
o Otras recomendaciones: elaboradas con el apoyo de FEAPS Madrid y de FEAFES.
o Guía técnica de accesibilidad en Centros de Trabajo.
En una segunda fase se desarrolló el software, la aplicación informática, que en el momento actual se encuentra en fase de pruebas y que se comenta a continuación.
¿Qué es APTRA?
La aplicación denominada Adecuación de puestos de trabajo, recomendaciones y ayudas técnicas3 –APTRA‐ es una herramienta informática interactiva desarrollada con criterios de accesibilidad en entorno web y creada para informar de las recomendaciones y ayudas técnicas que, en caso de ser necesario, contribuyen en la incorporación al puesto de trabajo de personas con deficiencias al facilitar la adecuación entre los requerimientos, las demandas4
5
, de los puestos de trabajo y las capacidades de quienes los desempeñan.
¿Qué se encuentra en APTRA?
1. APTRA muestra ejemplos de trabajadores que desempeñan, o desempeñaban en el momento de hacer el análisis, puestos de trabajo reales. Personas con nombres y apellidos están detrás de cada caso6 en estudio, aunque no se les vea, puesto que su derecho a la intimidad prevalece y está, y debe seguir estando, celosamente protegido.
3 Según la norma UNE‐EN ISO 9999, ayuda técnica es “cualquier producto, instrumento, servicio o sistema técnico utilizado por personas con discapacidad, fabricado especialmente o disponible en el mercado para prevenir, compensar, mitigar o neutralizar la deficiencia, discapacidad o minusvalía”. 4 Las demandas de los puestos de trabajo, de las actividades o tareas asociadas a los mismos, son los requerimientos físicos, psíquicos y sensoriales que los trabajadores ponen en juego para realizar las mismas. Como ejemplos de demandas señalar: permanecer de pie, agacharse, andar, ver de cerca, oler, calcular, resolver problemas, manejar el estrés, ... 5 Capacidad es la aptitud, el talento o la cualidad que dispone el trabajador para dar respuesta a la demanda de la tarea. Se describen de la misma forma que las demandas. Así, si el desempeño de un puesto de trabajo requiere “permanecer de pie”, el trabajador deberá tener capacidad para “permanecer de pie”. En caso de que el trabajador no tuviera esa capacidad o la tuviera alterada se podría compensar a través de una adaptación del puesto de trabajo, incorporando una ayuda técnica, por ejemplo, un asiento de apoyo isquiático que le permita estar de pie. 6 En esta aplicación se denomina caso al conjunto formado por cada puesto de trabajo y la persona con discapacidad que lo desempeña. Cada caso responde, como se ha indicado a una situación real.
11

En esos ejemplos se incorporan, cuando es necesario, recomendaciones genéricas sobre el entorno7 y la organización8
9
del trabajo, así como recomendaciones específicas de adecuación del puesto ‐incorporación de ayudas técnicas, formación de apoyo, modificación de tareas, ...‐ para que trabajadores ciegos o con deficiencia visual, sordos o con deficiencia auditiva, que utilizan bastones o sillas de ruedas, con enfermedad mental, cardiaca, neurológica, ..., con deficiencia intelectual, ... puedan desempeñar las tareas esenciales de sus puestos de trabajo con normalidad .
2. APTRA permite la creación de casos de trabajadores con deficiencia en el desempeño de puestos de trabajo para lo que ofrece los modelos creados para la aplicación, además del apoyo permanente de técnicos asesores, que son los administradores de la aplicación.
¿Para qué puede serle útil APTRA?
APTRA puede utilizarse, como se ha dicho, para:
• Conocer ejemplos de puestos de trabajo desempeñados por trabajadores con deficiencias.
• Informarse de qué ayudas técnicas o de qué recomendaciones se ofrecen para prevenir riesgos y mejorar la calidad de vida de trabajadores que ya están ocupando un puesto de trabajo, pero se encuentran con dificultades a la hora de realizar alguna de las tareas.
• Enseñar a otros o aprender y practicar creando casos propios, reales o teóricos:
o Presentar ejemplos de las adecuaciones realizadas en puestos de trabajo, entornos, sistemas organizativos, ..., al haber incorporado trabajadores con deficiencia en una empresa,
o Averiguar cómo dar solución a los posibles desajustes que se presenten para el desempeño de un puesto de trabajo a una persona con deficiencia, que ya ha sido seleccionada por ajustarse perfectamente al perfil de una oferta.
o Probar si un determinado puesto de trabajo puede ser desempeñado por personas con deficiencia.
7 Para conseguir la incorporación de trabajadores con deficiencia a los centros de trabajo, en ocasiones, no se tratará tanto de adaptar los puestos de trabajo como de adecuar el entorno haciéndolo accesible, para que pueda ser utilizado por todos con comodidad, eficiencia y seguridad. 8 También con frecuencia la incorporación al puesto de trabajo de una persona con deficiencia dependerá de modificaciones en la organización del trabajo. AL hablar de organización del trabajo se incluyen cuestiones tan dispares como la organización funcional y jerárquica, la cultura empresarial, los sistemas de prevención, los horarios, los turnos, la distribución de tareas, las relaciones con los demás trabajadores, … Todas ellas afectan a las demandas de los puestos de trabajo. Las recomendaciones se incorporarán al elaborar los casos o se podrán consultar en las guías y enlaces recogidos en el Área de Documentación que aparece en el menú de la aplicación. 9 Recogido de la Ley 51/2003, de 2 de diciembre, de igualdad de oportunidades, no discriminación y accesibilidad universal de las personas con discapacidad –LIONDAU‐, el principio de normalización es “el principio en virtud del cual las personas con discapacidad deben poder llevar una vida normal, accediendo a los mismos lugares, ámbitos, bienes y servicios que están a disposición de cualquier otra persona”.
12

• Para ... aquello que Vd descubra que le resulta útil.
NOTA: Cada trabajador, cada persona, es única e irrepetible y lo es también en sus capacidades y habilidades para la realización de actividades y tareas. No pueden darse soluciones automáticas. Se debe realizar un uso responsable de esta aplicación –se recuerda nota incorporada al principio‐.
Menú de usuario y área de documentación
Al entrar en la aplicación, tras darse de alta y ser validado como usuario, encontrará una pantalla en la que a la izquierda se mostrará el menú. Este menú se mantiene durante el tiempo que utilice la aplicación –como puede verse en la Figura nº 1, que se presenta a continuación‐.
Figura nº 1
13

El Menú consta de: Crear caso, Modificar caso, Eliminar caso, Buscar casos, Buscar informes, Mis datos y Guía menú usuario.
Y tras él aparece el Área de documentación, en la que se incorporan, además de la referencia al proyecto APTRA, un apartado denominado Manuales y guías en el que se recogen informaciones –accesibilidad, empleo con apoyo...‐ y enlaces a páginas web de utilidad.
De todas las funciones que ofrece el menú de la aplicación se describen con detalle, por su importancia, las que permiten consultar casos existentes en la aplicación y crear casos nuevos.
Consulta de casos
Los casos en consulta que se encuentran en la aplicación son de dos tipos:
• Casos del sistema que son los casos dados de alta por los administradores de la aplicación.
• Casos creados por usuarios y que han sido validados por los administradores.
Para acceder a cualquiera de ellos se puede utilizar la opción Buscar casos (Ver Figura nº 1) o la opción Buscar Informe del menú. A partir de cualquiera de ellas, utilizando las posibilidades de búsqueda de la aplicación se selecciona el puesto de trabajo –asociado a un caso‐ que se desea conocer y la información se mostrará en la pantalla. La aplicación permite editar esa información para grabarla o imprimirla según se requiera.
Tras presentar los datos tipo –número, autoría y fecha de creación del caso‐, el orden en el que se presenta la información, pensado para que se pueda decidir rápidamente sobre el interés que tiene el caso elegido, es el siguiente:
• Observaciones asociadas al caso: Se recoge aquí la información respecto a la adecuación realizada para un correcto ajuste entre el desempeño del puesto y el trabajador.
• Descripción del perfil del candidato: Se indica únicamente el tipo de deficiencia del trabajador y, en caso necesario, las ayudas técnicas que utiliza habitualmente.
Estos dos ítems permiten conocer si ese es el caso que se precisa por sus coincidencias con la situación concreta que afronta el usuario o si, por el contrario, hay que continuar la búsqueda.
Una vez que se confirme que el caso es el que interesa, se pasa a conocer los detalles del puesto de trabajo: Código del puesto, Nombre del puesto, Descripción del puesto, Descripción de funciones y Descripción de tareas
Y, a continuación, la aplicación muestra la relación demandas/capacidades del caso, en las que aparecerán únicamente aquellas en las que existiera desajuste entre las capacidades del trabajador y los requerimientos del puesto de trabajo. En cada uno de esos desajustes se presentan las soluciones, las ayudas técnicas, que se utilizaron y también, para finalizar, las recomendaciones generales –de organización, de accesibilidad, de vigilancia de la salud, etc.‐ aportadas.
14

Figura nº 2
Crear caso
Cuando se desee crear un caso (Ver Figura nº 2) para conocer los posibles desajustes que pudieran aparecer y sus posibles soluciones o cuando ya exista una situación real de desempeño de un puesto de trabajo en la que hubieran surgido desajustes y se precisara conocer soluciones, se puede crear un caso utilizando como apoyo el manual y el asesoramiento de los administradores de la aplicación.
Los apartados fundamentales son:
• Datos generales del caso: De todas los ítems que se presentan merece la pena destacar los siguientes:
o Código de puesto. Se selecciona uno dentro de la clasificación nacional de ocupaciones –CNO‐ que recoge la aplicación.
15

o Descripción del puesto. Se debe indicar cualquier información del entorno y del propio puesto de trabajo que sirva para analizar los requerimientos del mismo: situación, localización, elementos que lo componen, útiles o maquinaria que se requiere.
o Descripción de funciones. En este campo hay que enumerar y describir todas las funciones del puesto de trabajo.
o Descripción de tareas. Se deben describir las tareas que se realizan en ese puesto de trabajo y cómo se llevan a cabo.
o Descripción del candidato. Aquí hay que señalar únicamente las capacidades afectadas por la deficiencia que tiene el trabajador y si utiliza ayudas técnicas en su vida cotidiana.
• Demandas (Puestos de trabajo) – Capacidades (Perfil del candidato): En este apartado se presentan los siguientes campos:
o Tipo de discapacidad. Se debe seleccionar el tipo de discapacidad que puede presentarse al realizar las tareas, en función del tipo de deficiencia del candidato, y entre las que ofrece la aplicación: física, sensorial, intelectual/mental, comunicación.
o Grupo de demandas. Según el tipo de discapacidad seleccionada se cargan los requerimientos de los puestos, las demandas relacionadas. Se seleccionan aquellas demandas que puedan ser origen de desajustes para el desempeño por parte de ese trabajador en concreto.
o Grupo de capacidades. Conforme se hayan ido cargando las demandas habrán aparecido las capacidades. Hay que revisarlas para ver si realmente se corresponden con las dificultades reales que puede tener la persona al realizar las tareas asociadas a ese puesto.
o Cargar grupo. Permite la carga de las demandas y capacidades seleccionadas para que, a continuación, se pueda valorar según corresponda.
• Relaciones Demandas‐Capacidades: Mostrará las demandas y capacidades seleccionadas. Aquí es donde tras la selección que se propone a continuación se verá el posible desajuste y su grado:
o Valor de la demanda. Se debe indicar el grado de requerimiento de la tarea en este punto.
o Valor de la capacidad. Se debe seleccionar el valor específico que se corresponda con la capacidad del trabajador.
A partir de aquí y tras seguir las instrucciones que permiten generar lo que en la aplicación se denomina informe, se mostrarán:
16

• El apartado Desajuste demanda – capacidad y ayudas técnicas: Aparecen los desajustes que han surgido al relacionar el valor de cada demanda con el de cada capacidad, uno a uno, y un enlace Ver recomendaciones, en el que se podrá seleccionar la ayuda o ayudas que al solucionar el desajuste faciliten la ejecución de la tarea y por tanto posibiliten o mejoren el desempeño del puesto. Cada ayuda se muestra con su definición y fotografía‐.
• Y el apartado Recomendaciones generales: Se muestran varias recomendaciones que se utilizan habitualmente para que se puedan seleccionar en el caso de que sean acordes con las necesidades del caso en estudio.
El informe (Ver Figura nº 3) recogiendo todos los datos se edita, para grabarlo o imprimirlo.
Figura nº 3
Los casos creados, además de haber servido para resolver situaciones concretas de incorporación de trabajadores con discapacidad a empresas, se incorporarán a la base de datos. Se podrán utilizar, entonces, como nuevos ejemplos que animen a los responsables de las empresas a contratar más personas con discapacidad o a mejorar las condiciones de trabajo de quienes ya estén incorporados al mundo laboral.
17

Ayuda robótica para la rehabilitación de miembros superiores
José Mª Sabater, J. Mª Azorín, C. Pérez, N. García y M. Menchón
Virtual Reality and Robotics Lab. Universidad Miguel Hernández y Unidad de Daño Crebral Casaverde
Resumen
Muchas patologías se traducen en una reducción de la movilidad de los miembros superiores. Diferentes estudios clínicos realizados desde 1997 han demostrado que los tratamientos con la ayuda de robots específicos mejoran los resultados de las terapias de rehabilitación. El presente artículo presenta un estudio de la robótica de rehabilitación de miembros superiores, a la vez que plantea un análisis de los requerimientos cinemáticos y de seguridad que debe tener un nuevo dispositivo destinado a trabajar conjuntamente con los fisioterapeutas. Finalmente se muestran los primeros avances y simulaciones de un nuevo dispositivo que se está diseñando actualmente
Introducción
La rehabilitación física de los pacientes con parálisis de un lado del cuerpo (hemiparesia espástica) es un desafío muy complejo. La parálisis puede estar provocada por varias causas, entre ellas la hemorragia cerebral o infarto (apoplejía), traumas, tumores, esclerosis múltiple y defectos congénitos. La causa más común es la apoplejía, que puede producir daños permanentes y es uno de los trastornos neurológicos más comunes en Europa, con un 80% de supervivientes que presentan importantes daños neurológicos y un 31% que necesitan ayuda en las actividades de cada día. En la Unión Europa (UE), la incidencia media está entre 150 y 400 casos por cada 100.000 habitantes. En Asia Central y en los nuevos estados independientes de la antigua Unión Soviética, el índice de incidencia es 600, mientras que en Estados Unidos es 214. Es necesario mejorar la asistencia médica de estos pacientes, no sólo en el campo de una terapia intensiva, sino también en la rehabilitación.
Los pacientes apopléticos responden positivamente al movimiento pasivo de sus miembros dañados: es posible reejercitar el cerebro y lograr un cierto grado de recuperación funcional. En el caso de los miembros superiores, el movimiento pasivo implica la intervención de un fisioterapeuta que agarra el codo y la muñeca del paciente y flexiona repetidamente el brazo durante 40–45 minutos. Para conseguir una rehabilitación eficaz se debe hacer este ejercicio pasivo dos veces al día durante un período mínimo de un mes, seguido de varios meses de ejercicio activo, en combinación con el trabajo activo del fisioterapeuta. A menudo no son posibles estos niveles de atención. Diferentes estudios clínicos realizados desde 1997 han demostrado que los tratamientos con la ayuda de robots específicos mejoran los resultados de las terapias de rehabilitación [1], [2], [3].
19
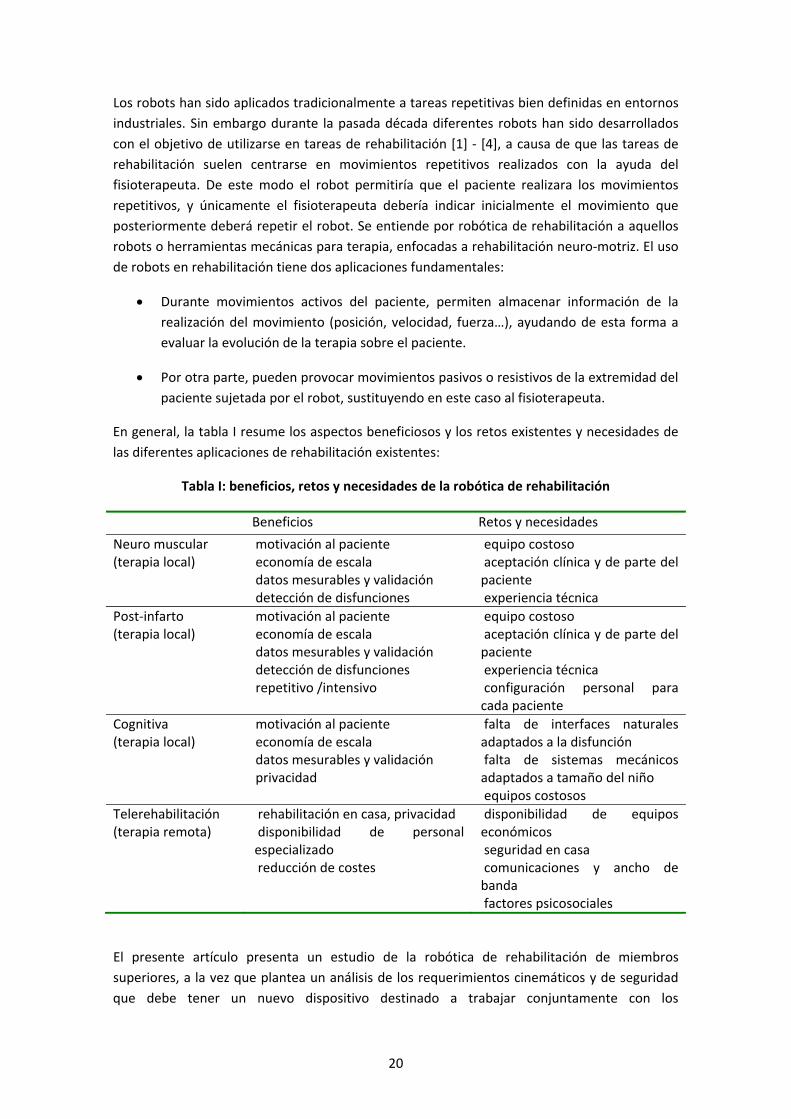
Los robots han sido aplicados tradicionalmente a tareas repetitivas bien definidas en entornos industriales. Sin embargo durante la pasada década diferentes robots han sido desarrollados con el objetivo de utilizarse en tareas de rehabilitación [1] ‐ [4], a causa de que las tareas de rehabilitación suelen centrarse en movimientos repetitivos realizados con la ayuda del fisioterapeuta. De este modo el robot permitiría que el paciente realizara los movimientos repetitivos, y únicamente el fisioterapeuta debería indicar inicialmente el movimiento que posteriormente deberá repetir el robot. Se entiende por robótica de rehabilitación a aquellos robots o herramientas mecánicas para terapia, enfocadas a rehabilitación neuro‐motriz. El uso de robots en rehabilitación tiene dos aplicaciones fundamentales:
• Durante movimientos activos del paciente, permiten almacenar información de la realización del movimiento (posición, velocidad, fuerza…), ayudando de esta forma a evaluar la evolución de la terapia sobre el paciente.
• Por otra parte, pueden provocar movimientos pasivos o resistivos de la extremidad del paciente sujetada por el robot, sustituyendo en este caso al fisioterapeuta.
En general, la tabla I resume los aspectos beneficiosos y los retos existentes y necesidades de las diferentes aplicaciones de rehabilitación existentes:
Tabla I: beneficios, retos y necesidades de la robótica de rehabilitación
Beneficios Retos y necesidades
Neuro muscular (terapia local)
motivación al paciente economía de escala datos mesurables y validación detección de disfunciones
equipo costoso aceptación clínica y de parte del paciente experiencia técnica
Post‐infarto (terapia local)
motivación al paciente economía de escala datos mesurables y validación detección de disfunciones repetitivo /intensivo
equipo costoso aceptación clínica y de parte del paciente experiencia técnica configuración personal para cada paciente
Cognitiva (terapia local)
motivación al paciente economía de escala datos mesurables y validación privacidad
falta de interfaces naturales adaptados a la disfunción falta de sistemas mecánicos adaptados a tamaño del niño equipos costosos
Telerehabilitación (terapia remota)
rehabilitación en casa, privacidad disponibilidad de personal especializado reducción de costes
disponibilidad de equipos económicos seguridad en casa comunicaciones y ancho de banda factores psicosociales
El presente artículo presenta un estudio de la robótica de rehabilitación de miembros superiores, a la vez que plantea un análisis de los requerimientos cinemáticos y de seguridad que debe tener un nuevo dispositivo destinado a trabajar conjuntamente con los
20

fisioterapeutas. Finalmente se muestran los primeros avances y simulaciones de un nuevo dispositivo que se está diseñando actualmente.
Estado de arte de robots para rehabilitación de miembros superiores
El primer trabajo en robótica de rehabilitación y terapias de asistencia empezó en los años 1960 con el dispositivo CASE y los manipuladores de Rancho Los Amigos, y desde entonces han aparecido una amplia variedad de sistemas, muchos de los cuales se encuentran detallados en [4] y [5].
Entre estos dispositivos hay que destacar el MIT‐MANUS [4], [6], que fue utilizado para demostrar los beneficios de la interacción con un dispositivo planar durante las etapas iniciales de la recuperación. El dispositivo MIT‐MANUS (Figura 1) es un manipulador robótico planar construido mediante un mecanismo SCARA que permite dos grados de libertad (GDL) traslacionales y que fue diseñado para rehabilitación de pacientes con apoplejía [6]. El MIT‐ MANUS puede mover u oponerse a los movimientos de hombro y codo del paciente. Este robot usa diferentes sensores para medir la posición, velocidad y fuerzas ejercidas sobre el efector final. Esta información es enviada a un PC donde se actualiza una interfaz gráfica de usuario. Esta interfaz consiste de varios juegos diseñados para motivar al paciente en su rehabilitación. Si el paciente no responde a las indicaciones del juego, el robot comienza a ayudar al paciente a realizar el ejercicio.
Figura 1. Robot MIT‐Manus
Figura 2. Robot MIME
El dispositivo MIME (Mirror Image Movement Enabler) (Figura 2) fue creado para rehabilitación de extremidades superiores [1]. Este dispositivo fue diseñado utilizando un robot PUMA‐260 para el brazo hemipléjico y un soporte 3D para el brazo no afectado. Este
21

dispositivo permite al paciente trabajar en un espacio 3D, de forma que el robot PUMA es capaz de sujetar el brazo durante movimientos 3D. El robot está conectado a un sensor de fuerzas para monitorizar la fuerza del paciente. MIME utiliza 3 modos unilaterales y uno bilateral de funcionamiento. En el modo bilateral, el brazo no afectado controla el movimiento del robot. Los modos unilaterales, utilizan solo el robot PUMA, y son los modos pasivo, activo‐asistido, activo‐resistencia, y auto‐guiado.
El sistema GENTLE/S (Figura 3) es un sistema robótico financiado por la Comisión Europea formado principalmente por el brazo robot Haptic Master de 3 GDL y un ordenador en el que se muestra un entorno virtual interactivo [2], [7]. Se utiliza una articulación pasiva de 3 GDL para sujetar el brazo del paciente al robot. Además, se emplean unas cuerdas enlazadas a una estructura para soportar al antebrazo y el brazo mediante una órtesis. Este sistema permite movimientos 3D del brazo.
Figura 3. Sistema GENTLE/S
Figura 4. “Artificial Muscle Manipulator”
El “Artificial Muscle Manipulator” (Figura 4) es un manipulador de 2 GDL diseñado para rehabilitación que usa como actuadores músculos neumáticos [8]. La elección de músculos neumáticos satisface las necesidades de seguridad y flexibilidad requeridas en aplicaciones en las que hay interacción con personas, a diferencia de los robots industriales.
22

Por otra parte, en los últimos años se ha comprobado que el uso de técnicas de realidad virtual mejora el proceso de rehabilitación [9]. Debido a que la motivación del paciente es clave para la rehabilitación, los ejercicios de rehabilitación aplicando técnicas de realidad virtual pueden “situar” al paciente en un mundo virtual, motivando la realización de ejercicios de rehabilitación.
A partir de esta breve revisión del estado actual de la tecnología en rehabilitación robótica se puede observar que existe una demanda de tecnología robótica adaptada que permita mejorar la atención que los fisioterapeutas dan a sus pacientes. En particular, hay una necesidad de sistemas multifuncionales con un gran número de grados de libertad, un espacio de trabajo suficiente y ergonómicos que hagan atractivo su uso tanto a pacientes como a fisioterapeutas. Por otra parte, estos dispositivos han de ser seguros, poco complejos y ligeros, para permitir su uso en casa mediante técnicas de telerehabilitación.
Espacio de trabajo requerido
El estudio previo del espacio de trabajo objetivo es crucial para el diseño de un dispositivo útil. Los requerimientos de este espacio de trabajo deben ser proporcionados por los expertos fisioterapeutas. En este artículo, la combinación de movimientos de rehabilitación elegida procede del método de facilitación neuromuscular propioceptiva (FNP) [10], también llamado método Kabat. Este método se emplea para demandar específicamente respuestas fisiológicas por parte del sistema neuromuscular. Con él se pretende promover o acelerar la respuesta del mecanismo neuromuscular, por medio de la estimulación de los propioceptores. Las combinaciones de movimientos, llamados patrones de movimientos, empleados en la FNP son patrones de movimiento en masa. El movimiento en masa es una característica de la actividad motora normal. En ésta, las diversas combinaciones de movimientos requieren reacciones de alargamiento y acortamiento en muchos músculos y en grados distintos. Es por ello por lo que los patrones de movimiento, muy similares a los patrones funcionales de movimientos normales, están constituidos por una serie de movimientos cuya combinación es óptima para obtener la contracción secuencial y única de los músculos responsables de dicho movimiento, de forma armónica. Cuando se realizan venciendo resistencia, las modalidades de facilitación promueven la irradiación selectiva. Los patrones de movimiento son de carácter espiral y diagonal, en consonancia con las características espirales y rotativas de los huesos y articulaciones del esqueleto, y con sus respectivas estructuras ligamentosas. Este tipo de movimiento también concuerda con la alineación topográfica de las inserciones musculares y con las características estructurales de cada músculo en particular. Además, a principios de 1951 se halló que las combinaciones de movimientos más eficaces son las que permiten la elongación máxima de grupos musculares afines, para obtener así el reflejo de estiramiento a través de un patrón. Respecto al miembro superior, existen dos diagonales de movimiento, cada una compuesta por dos patrones de movimiento antagónicos entre sí. Cada uno de los patrones puede tener un componente principal flexor o extensor, un segundo abductor o aductor, y un tercero rotador externo o rotador interno. Para colocar un determinado segmento corporal en la posición inicial de un patrón hay que tener en cuenta, de proximal a distal, todos los componentes musculares responsables de dicho movimiento. Se considera primero el componente de flexión o extensión, luego abducción o aducción y, por último, rotación externa o interna. Sin embargo, cuando se ejecuta el patrón de movimiento, el primer
23

componente es el rotador, y los otros dos se combinan para darle al patrón su trayectoria diagonal. Las dos diagonales para miembro superior son:
• ‐Diagonal D1: Está compuesta por dos patrones, D1 flexión y D1 extensión.
a) El patrón D1 flexión está compuesto por los movimientos:
Hombro: Flexión, aducción y rotación externa.
Codo: Flexión o extensión.
Muñeca: Flexión, supinación e inclinación radial.
Dedos: Flexión y aducción.
b) El patrón D1 extensión está compuesto por los movimientos:
Hombro: Extensión, abducción y rotación interna.
Codo: Flexión o extensión.
Muñeca: Extensión, pronación e inclinación cubital.
Dedos: Extensión y abducción.
• ‐Diagonal D2: Está compuesta por dos patrones, D2 flexión y D2 extensión.
a) El patrón D2 flexión está compuesto por los movimientos:
Hombro: Flexión, abducción y rotación externa.
Codo: Flexión o extensión.
Muñeca: Extensión, supinación e inclinación radial.
Dedos: Extensión y abducción.
b) El patrón D2 extensión está compuesto por los movimientos:
Hombro: Extensión, aducción y rotación interna.
Codo: Flexión o extensión.
Muñeca: Flexión, pronación e inclinación cubital.
Los patrones de FNP se ejecutan en movimientos activo libre, activo asistido, activo resistivo y pasivo. El objetivo final es siempre la ejecución coordinada de los patrones de movimiento en todo el recorrido articular posible, sin provocar dolor, con equilibrio de fuerza y en las dos diagonales de movimiento.
24

Nuestra solución
La idea principal es utilizar músculos neumáticos de bajo coste (figura 6) para el desarrollo de un brazo robótico capaz de resolver los problemas de singularidades que aparecen en las trayectorias que se realizan durante el proceso de rehabilitación (Diagonal D1 y Diagonal D2). Para ello se ha diseñado un brazo con una redundancia en la muñeca, como el mostrado en el esquema cinemático de la figura 5. Esta solución permite “independizar” el movimiento del brazo del paciente y del robot, permitiendo que éste siga la trayectoria deseada sin tener que forzar al paciente. Esta característica hace que el espacio de trabajo cartesiano sea suficiente para cumplir los requisitos de rango de movimiento (ROM) de las articulaciones del brazo.
Figura 5. Esquema cinemático de 7 GDL
Por otra parte, se está diseñando un sistema de control de la extensión de los dedos y mano del paciente, al estilo del nuevo módulo “hand” del MIT‐MANUS, de forma que a diferencia de otros dispositivos presentados anteriormente, los movimientos de rehabilitación incluyan la extensión / abducción de los dedos, y sean útiles para la terapia.
Figura 6. Sistema testbed para el control de músculos neumáticos
25

El modo de funcionamiento del robot para la rehabilitación del paciente será el siguiente (figura 7). En primer lugar, el paciente se situará en la camilla y colocará su mano en el mecanismo situado en el extremo del robot. Acto seguido, el fisioterapeuta realizará el movimiento de rehabilitación sobre el paciente, de forma que el robot irá registrando el movimiento efectuado. A continuación, el robot repetirá el movimiento de forma autónoma las veces indicadas por el fisioterapeuta, bajo la supervisión de éste. De este modo, el fisioterapeuta con la ayuda de varios robots, podrá al mismo tiempo monitorizar la recuperación de varios pacientes de forma más detallada. Para permitir los diferentes modos de funcionamiento del robot (activo, pasivo y resistivo), éste contará con un sistema de sensores de posición y fuerzas que permitirá registrar todas las posiciones por las que pasa el robot, así como todas las fuerzas ejercidas. Además de permitir movimientos pasivos de la extremidad superior del paciente, el robot también podrá ser utilizado durante movimientos activos para almacenar la información relativa a la realización del movimiento (posición y fuerza), y de este modo poder evaluar la evolución de la terapia sobre el paciente.
Figura 7. Sistema de rehabilitación diseñado
La siguiente secuencia de imágenes describe el movimiento del brazo principal de 7 GDL proyectado en sus movimientos sobre la Diagonal D1, y permiten conocer el funcionamiento del robot.
Figura 7. Secuencia de la Diagonal D1
26

Conclusiones
Los resultados clínicos disponibles han mostrado los beneficios de la aplicación de la robótica para las terapias de rehabilitación para miembros superiores. Diversos prototipos de investigación han abordado diferentes aspectos de la rehabilitación.
Los requerimientos necesarios para el diseño de un nuevo dispositivo útil y funcional hacen referencia a:
Espacio de trabajo, cartesiano, articular (ROM)
Seguridad
Aceptación clínica y paciente
Técnicas de realidad virtual para la motivación
El sistema presentado se está desarrollando actualmente y trabaja en:
Redundancia cinemática para adaptar los espacios de trabajo
Uso de músculos neumáticos de bajo coste y seguridad intrínseca
Dispositivo ligero y ergonómico que evita interferencias con el fisioterapeuta
Sistemas de realidad virtual para la rehabilitación
Sistema de telerehabilitación
Bibliografía
[1] Burgar, C.G., Lum, P.S., Shor, P.C., Van der Loos, H.F.M. (Jan 9 2001), “Development of robots for rehabilitation therapy: The Palo Alto VA/Stanford experience”, (VA Research and Development), Available: http://www.vard.org/jour/00/37/6/burga376.htm.
[2] Hawkins, P., Smith, J., Alcock, S., Topping, M., Harwin, W., Loureiro, R., Amirabdollahian, F., Brooker, J., Coote, S., Stokes, E., Johnson, G., Mak, P., Collin, C., & Driessen, B. (2002) GENTLE/S project: Design and ergonomics of a stroke rehabilitation system, 1st Cambridge Workshop on Universal Access and Assistive Technology March 25‐27 2002, pp. 85‐90. Available: http://rehab‐www.eng.cam.ac.uk/cwuaat/02/15.pdf
[3] Krebs, H.I., Hogan, N., Aisen, M.L., & Volpe, B.T. (1998), “Robot‐aided neurorehabilitation”, IEEE Transactions on Rehabilitation Engineering, vol. 6 no. 1, March 1998, pp. 75 – 87.
[4] Merrit, Carey Reid. A pneumatic actuated brace designed for upper extremity stroke rehabilitation. PhD Thesis, North Carolina State University.
[5] Hillman, M, “Rehabilitation robotics from past to present‐ a historical perspective” Proc. Of Int. Conference on Rehabilitation Robotics, Daejeon, Korea, April, 2003.
27

28
[6] N. Hogan, H.I. Krebs, J. Charnnarong, P. Srikrishna, P. Sharon “MIT‐MANU: a workstation for manual therapy and training” Proc. Of IEEE Workshop on Robot and Human Communication, pp.161‐165, Tokyo, Japan, 1992
[7] P. Mark, G.T. Gomes, G.R. Johnson, “ A robotic approach to neuro‐rehabilitation – interpretation of biomechanical data” 7th Int. Symposium on the 3D analysis of Human Movement, Centre for Life, Newcastle upon Tyne, IK, July 10‐12, 2002
[8] Noritsugu, T. & Tanaka, T. (1997), “Application of rubber artificial muscle manipulator as a rehabilitation robot”, IEEE/ASME Transactions On Mechatronics, vol. 2, no. 4, Dec. 1997, pp. 259 – 267.
[9] Jack, D., Boian, R., Merians, A., Tremaine, M., Burdea, G., Adamovich, S. Recce, M., Poizner, H. (2001), “Virtual Reality‐Enhanced Stroke Rehabilitation”, IEEE Transations on Neural Systems and Rehabiliation Engineering, vol. 9, no. 3, Sept. 2001, pp. 308‐18.
[10] Voss, Ionta, Myers. Facilitación Neuromuscular Propioceptiva. Patrones y técnicas. Editorial Panamericana.3ª Edición.

Domótica asistencial. Concepto y ejemplos
Rosa Mª Regatos Soriano Arquitecto Técnico del CEAPAT
Resumen
La Domótica se presenta como una clara herramienta y, porque no,”ayuda técnica” para mejorar la calidad de vida de las personas mayores y/o dependientes o con alguna discapacidad. Así se están realizando distintas experiencias encaminadas a adecuar estos sistemas al usuario y ver en que grado sirven de ayuda. Tan solo se quiere mostrar lo ya conseguido y hasta donde se podría llegar con una buena aplicación de la tecnología y las tecnologías de la información y la comunicación (TIC).
1. Introducción
El Centro Estatal de Autonomía Personal y Ayudas Técnicas es un centro tecnológico dependiente del IMSERSO, Ministerio de Trabajo y Asuntos Sociales, creado mediante Orden Ministerial de 7 de abril de 1989.
El CEAPAT está dedicado expresamente a potenciar la accesibilidad integral y el desarrollo de la tecnología. Promueve la optimización de las ayudas técnicas y el diseño para todos, con el fin de mejorar la calidad de vida de los ciudadanos, con especial apoyo a las personas con discapacidad y personas mayores.
Su ámbito de actuación es nacional. Para ello cuenta con delegaciones y una amplia red de centros de asesoramiento e información.
Áreas de actividad:
• Arquitectura y urbanismo accesibles.
• Transporte accesible.
• Tecnologías de la información y comunicación accesibles. Telecomunicaciones para todos.
• Diseño para todos.
• Ayudas técnicas y tecnología de apoyo.
• Adaptación de puestos de trabajo.
• Acceso al ordenador.
29

• Evaluación de productos y servicios.
• Normas técnicas. Especificaciones técnicas.
• Investigación y desarrollo en tecnología de la rehabilitación.
• Diseño de adaptaciones.
• Informaciones y publicaciones. Formación y coordinación.
A quienes va dirigido:
A personas con discapacidad, personas mayores, personas con limitaciones temporales, profesionales, investigadores, empresarios, diseñadores y todas aquellas personas y entidades relacionadas con los campos de la accesibilidad, el diseño y las tecnologías.
Objetivos:
En estrecha colaboración con entidades y asociaciones, el CEAPAT y sus delegaciones trabajan para conseguir los siguientes objetivos:
1. Potenciar la accesibilidad integral tanto en los ámbitos de la vivienda como en edificios, entornos y servicios.
2. Conseguir un transporte accesible como medio fundamental para la plena participación social.
3. Lograr plena accesibilidad en la comunicación, información y nuevas tecnologías.
4. Fomentar el "diseño para todos" en productos y servicios de consumo general, con el fin de que puedan ser utilizados por personas con discapacidad y mayores.
5. Potenciar la tecnología de la rehabilitación (investigación y desarrollo, mercado de ayudas técnicas, normalización y coordinación entre sectores) y promover la participación de usuarios.
6. Favorecer la formación y el empleo a través de la accesibilidad, la adaptación de puestos de trabajo y la optimización de ayudas técnicas.
7. Ofrecer formación, difusión e información a través de cursos, publicaciones, boletines, documentos, artículos, catálogos y bases de datos en internet y otros medios accesibles.
Qué servicios ofrece el centro:
• Información y asesoramiento en accesibilidad integral y diseño para todos en los campos de arquitectura, urbanismo, vivienda, domótica, turismo, transporte, comunicación e información, telecomunicaciones, informática, nuevas tecnologías, servicios y productos.
30

• Información y asesoramiento en ayudas técnicas para la vida diaria, movilidad, comunicación, vivienda, trabajo y ocio.
• Realización de proyectos y apoyo técnico a entidades, organismos, usuarios, profesionales y agentes del mercado.
• Elaboración del Catálogo general de ayudas técnicas, con información sobre productos, características técnicas, fabricantes y distribuidores.
• Apoyo técnico para el desarrollo y cumplimiento de legislación, normas técnicas, especificaciones y criterios de calidad.
• Evaluación técnica de productos, servicios y proyectos.
• Biblioteca especializada en tecnología de la rehabilitación, accesibilidad, transporte, comunicación, ayudas técnicas, nuevas tecnologías, normativa y legislación.
• Exposición de ayudas técnicas, presentaciones de nuevos productos, jornadas de puertas abiertas.
• Apoyo técnico en programas de investigación, desarrollo e innovación en accesibilidad, tecnología de la rehabilitación y servicios para todos.
• Coordinación de estudios de mercado sobre los campos de referencia.
• Asesoramiento y evaluación para permitir el acceso al ordenador y optimización de nuevas tecnologías. Unidad de demostración de equipos informáticos accesibles.
• Asesoramiento en la adaptación de puestos de trabajo.
• Producción de adaptaciones y pulsadores para juguetes, ordenador, comunicación y autonomía.
• Elaboración de publicaciones, Boletín del CEAPAT, traducciones y documentación técnica.
• Formación técnica y transferencia de conocimiento y experiencia.
• Coordinación y enlace con instituciones públicas y privadas, organismos y asociaciones a nivel nacional e internacional.
• Representación nacional en programas europeos e internacionales.
• Recursos humanos y técnicos
• El equipo interprofesional del CEAPAT está formado por técnicos de los campos de la arquitectura, ingeniería, ciencias empresariales, psicología, logopedia, terapia ocupacional, documentación, informática, personal de talleres, administración y dirección.
• La sede central del CEAPAT ocupa un amplio edificio accesible en el que se ubican:
31

• Exposición de ayudas técnicas.
• Unidad de demostración de equipos informáticos adaptables.
• Biblioteca.
• Salón de actos.
• Talleres.
• Salas de reuniones y despachos.
Las delegaciones del CEAPAT cuentan con UNE equipo interprofesional. disponen de exposición de ayudas técnicas y, al estar ubicados en centros del IMSERSO (CRMF, comparten con ellos instalaciones y recursos técnicos.
Ubicación:
CEAPAT, sede central:
Calle Los Extremeños 1 (esquina avenida Pablo Neruda). 28018 Madrid.
Teléfono: 91‐363 48 00
Fax: 91‐778 41 17
Teléfono de texto: 91‐778 90 64
Información sobre el CEAPAT en internet:
http://www.seg‐social.es/IMSERSO
Correo electrónico: [email protected]
Delegaciones:
• Delegación del CEAPAT en Albacete
C/ Jesús del Gran Poder, 1. 02006 Albacete
Tel.: 967‐21 65 01 / 61
Fax: 967‐21 66 37
• Delegación del CEAPAT en Cádiz:
C/ Pintor Fernando Vela, s/n. 11100 San Fernando. Cádiz
Tel.: 956‐80 30 01 / 48 79 50
Fax: 956‐48 79 54
• Delegación del CEAPAT en La Rioja
32

C/ Donantes de sangre, 4. 26140 Lardero. La Rioja
Tel.: 941‐44 81 13
Fax: 941‐44 90 15
• Delegación del CEAPAT en Salamanca
Avda. de Villamayor, 79. 37006 Salamanca
Tel.: 923‐23 48 50
Fax: 913‐12 18 92
2. Domótica Asistencial.
La primera pregunta que debemos hacernos es qué entendemos por Domótica Accesible o Asistencial, podríamos definirla como “un conjunto de servicios de la vivienda garantizado por sistemas que realizan varias funciones, los cuales pueden estar conectados entre sí, a redes interiores y/o exteriores de comunicación. Obteniendo un notable ahorro de energía, una eficaz gestión técnica de la vivienda, una buena comunicación con el exterior y un alto nivel de confort y seguridad, contando con características adecuadas al usuario que “asisten” o ayudan al mismo en el desarrollo de las actividades de la vida diaria”. Denotamos obviamente, que su aplicación sirve para mejorar la calidad de vida de las personas que habitan en ella. Si bien, hay que tener en cuenta las capacidades de los distintos usuarios y su bien llamada “diversidad funcional” ya que cada uno de nosotros nos desenvolvemos, en las mismas circunstancias, de formas diferentes según nuestras capacidades y gustos propios. Así, todas las aplicaciones que se están desarrollando en los últimos tiempos deberían, ante todo, ajustarse a las distintas necesidades de los diferentes usuarios para lo cual, tendrán que ser lo suficientemente flexibles en sí mismas, como para no tener que desarrollar productos orientados hacia uno u otro colectivo, es decir, el mismo producto se debería poder configurar de forma sencilla para que lo utilice una persona mayor o joven, con resto visual o ciega, con hipoacusia o sorda, con alzheimer o con algún trastorno mental o con problemas de movilidad, y tendrá que poder asimilar los cambios del usuario en el tiempo, bien por cambio de propietario o bien por cambio de las necesidades y/o capacidades iniciales del usuario.
En esta revolución tecnológica en la que estamos, podemos ver como se están promoviendo iniciativas en las que se generan entornos domóticos donde usuarios con distintas capacidades y necesidades prueban los diferentes mecanismos y sus funciones para determinar cuales de ellos se ajustan más a sus necesidades, tal es el caso de la iniciativa llevada a cabo por ASPACE (Asociación de la Parálisis Cerebral) en Barcelona donde a través del Centro de Recursos y Ayudas Técnicas (CRA) ubicado en un piso totalmente adaptado y domotizado con distintos sistemas de control, se intenta mostrar las posibilidades teniendo como objetivo la valoración de ayudas técnicas en función de las patologías motrices y la ayuda en el aprendizaje del uso de los nuevos recursos técnicos y, en su caso, su readaptación al usuario constituyendo una primera aproximación al uso de la tecnología por parte de personas con discapacidad.
33

En esta misma línea encontramos otra experiencia esta vez realizada por el IMSERSO en la delegación del CEAPAT en San Fernándo (Cádiz). Dónde, aprovechando la antigua vivienda del conserje del CRMF (Centro de Recuperación de Minusválidos Físicos) se plantea su adaptación e implementación mediante un sistema domótico para que sus instalaciones puedan ser utilizadas por los residentes en el CRMF, como entrenamiento para la vida independiente con ayuda de las nuevas tecnologías. En esta experiencia se intentó automatizar el máximo número de elementos de tal forma que se pudieran adecuar a las necesidades de los distintos usuarios, así obtuvimos un sistema modular programable que permite el control de la iluminación que, además, se podía utilizar como codificación para el control del entorno por parte de personas con deficiencias auditivas; el control de los electrodomésticos, de la climatización, de puertas y persianas de forma individual o conjunta; sistemas de seguridad activa para control de fugas de gas y agua, del paciente encamado o que pueda sufrir alguna caída en el interior. El sistema contará con la posibilidad de activar/desactivar cualquier función de forma remota.
El Proyecto Modula es otra iniciativa, esta vez de una empresa valenciana: LARTEC, Desarrollos Inteligentes S.L., que con ayuda del IBV (Instituto de Biomecánica de Valencia), la UDP (Unión Democrática de Pensionistas), el CEOMA (Confederación Estatal de Organizaciones de Mayores) y el apoyo del IMSERSO, desarrolla el proyecto de investigación, con el objetivo de adecuar el sistema domótico DiLartec a las personas mayores para hacer de él un uso eficaz en sus viviendas.
En el CEAPAT se ha generado una zona de exposición y demostración de algunos elementos domóticos accesibles para que se puedan probar y valorar sus distintas prestaciones y dispositivos para asegurar su adecuación al usuario.
Otra iniciativa digna de mención es el Proyecto Hogar Digital Accesible (H@D). Llevado a cabo por la Escuela Universitaria de Ingeniería Técnica de Telecomunicación de la Universidad Politécnica de Madrid, junto con el Colegio Oficial de Ingenieros Técnicos de Telecomunicación y un consorcio de empresas, mayoritariamente ligadas al sector de las TIC, y cuyo objetivo es promover e impulsar iniciativas de formación y de I+D+i en este ámbito fuertemente ligado tanto a la Universidad como a diversas entidades públicas y privadas.
El proyecto reproduce a escala real una vivienda media de 90 metros cuadrados en la que se ha integrado una muestra representativa de las últimas tecnologías, productos y servicios disponibles próximamente en el mercado, destinados al Hogar Digital. Las instalaciones realizadas sirven como laboratorio docente y de investigación para lo que se ha diseñado un programa de utilización con fines formativos, sirviendo como muestra permanente de interés para todos los sectores implicados. Se inauguró el pasado 16 de mayo de 2006, víspera del día de Internet, coincidiendo con el desarrollo del III Encuentro sobre Telecomunicaciones y Discapacidad celebrado en la citada Escuela.
En el Proyecto Hogar Digital Accesible se han incorporado novedades recientes de las Tecnologías de la Información y las Comunicaciones con el fin de facilitar a los usuarios un acceso seguro y personalizado a su vivienda, incluyendo todos los elementos domóticos accesibles y configurables, para poder controlar la casa desde cualquier lugar distante usando una red fija o de comunicaciones móviles con independencia del tipo de red de área
34

residencial (HAN) instalada. El Hogar Digital Accesible cuenta también con el apoyo del Ministerio de Industria, Turismo y Comercio, del Ministerio de Vivienda y del Ministerio de Trabajo y Asuntos Sociales, a través del CEAPAT‐IMSERSO, así como con la colaboración de la Federación Nacional de Empresarios de Instalaciones Eléctricas y Telecomunicaciones de España (FENIE).
El Hogar Digital instalado en la EUITT‐UPM es fruto de la colaboración con el COITT y el consorcio de 11 empresas, nace como espacio permanente para la formación, investigación e innovación en el desarrollo y difusión social de las tecnologías y servicios implicados. La accesibilidad para personas en situación de dependencia es un requisito fundamental en este proyecto y ha sido contemplada desde el primer momento en lo que se refiere a la reducción de barreras arquitectónicas. En la etapa actual se está estudiando un plan de actualización que extienda los niveles de accesibilidad a los servicios y tecnologías para otros colectivos con discapacidad visual o auditiva, entre otros. El H@D también contempla el deseo de ser punto de encuentro para iniciativas de formación e I+D tanto en la UPM como en otras instituciones de carácter público y empresarial.
Otra iniciativa destacable, digna de estudio, es la llevada a cabo por el Centro Dato y la Asociación Adamar formada por un grupo de padres de alumnos del Centro Dato, donde han puesto en marcha un complejo residencial para personas con discapacidad física gravemente afectadas y que lleva funcionando desde enero de 2004. En los llamados “Estudios Asura” por estar ubicados en el nº 78 de dicha calle en Madrid, se ha construido un complejo formado por cuatro edificios diferentes unidos entre sí por la planta baja, en la que se han ubicado zonas comunes totalmente accesibles (comedor, cafetería, despachos de dirección, etc.), mientras que en dos plantas superiores se han distribuido treinta y cinco estudios como residencia habitual de personas con una movilidad muy reducida y que han sido diseñados a medida de cada uno de ellos y de sus necesidades; este complejo se ha dotado de distintos elementos domóticos con el fin de aumentar la autonomía personal de sus residentes. Cada estudio cuenta con una habitación – estudio y un baño adaptado, con climatización individual e interface de control acorde con su movilidad. Todas las habitaciones cuentan con medidas de seguridad conectadas a un control central vigilado por un grupo de tutores.
En esta línea se ha desarrollado un Sistema Central de Control de Tecnologías Domóticas que se va a implantar en el Centro Integral de Alzheimer que se está construyendo en Madrid, impulsado por la Fundación Reina Sofía y con la colaboración de AFAL (Asociación de Enfermos de Alzheimer), el CEAPAT‐IMSERSO y la empresa Technology for Living (T4L) creadora del sistema de aplicación en residencias con personas asistidas, principalmente con demencia, merecedora del Premio Imserso Infanta Cristina 2005 en I+D+i en nuevas tecnologías y ayudas técnicas. Con el sistema se quiere conseguir un entorno amable utilizando las nuevas tecnologías, la idea no es controlar sino ayudar con las máximas garantías, monitorizando al residente sin atentar contra su intimidad, así el sistema mejorará la calidad de vida del enfermo; las familias estarán más tranquilas porque se les podrá facilitar un nivel de información mayor y la residencia contará con una herramienta que les permitirá realizar mejor su trabajo y dedicar más tiempo al paciente. El sistema contará con una serie de sensores que detectan las actividades de los pacientes y que transmiten a la unidad central de forma inalámbrica mediante tecnología WIFI. El sistema desarrolla el control del alumbrado, la
35

llamada a los cuidadores que contarán con un sistema inalámbrico de transmisión y recepción en donde, en tiempo real, recibirán las distintas incidencias pudiendo contactar entre ellos y con el paciente e incluso recibir llamadas telefónicas, control de errantes para saber qué usuario y dónde se está moviendo, alarmas por caídas en las habitaciones, control de puertas y sistemas de accesos, de persianas, de suministro de agua y gases medicinales, de relojes en todas las instalaciones para su sincronía, , control de intrusión, CCTV, megafonía, detección de incendios, etc.9
Una de las mayores barreras existentes en la penetración de la domótica, y por ende, del entorno inteligente, consiste en la propia formación por parte de los usuarios. España sigue manteniendo uno de los últimos lugares entre los países occidentales en cuanto a uso de tecnologías. Con independencia de la telefonía móvil, los españoles nos encontramos en los últimos puestos de acceso digital, por lo que irremediablemente, nuestra incorporación en un entorno digital será mucho más lenta que en otros mercados como pueden ser los asiáticos, escandinavos, o norteamericanos. En general, existe un gran desconocimiento de las prestaciones domóticas, de sus posibles aplicaciones a las personas con alguna discapacidad y de sus posibilidades para conseguir un aumento de la autonomía personal de los usuarios, lo que se ha empezado a llamar “Domótica Asistencial”. Se ha abierto un campo muy amplio, pero a su vez se plantean nuevos problemas; por una parte las empresas desconocen las características de los colectivos con discapacidad, por otra los usuarios son reticentes a depositar su confianza en un sistema tecnológico, sobre todo si éste cuenta con un protocolo propietario que no permite interactuar con otros y que para poder modificarlo necesitan a la empresa que, normalmente, no puede garantizar el tiempo que seguirá ofertando sus servicios, de modo que si la empresa desaparece, será necesario cambiar el sistema completo. Estas reticencias se agravan sobre todo si se depende del sistema para la realización de las actividades de la vida diaria, como nexo de unión con el exterior, para la seguridad o para la movilidad.
Dado que esto se ha hecho evidente, vemos iniciativas como la de CEDOM (Asociación Española de Domótica) que ha presentado una Guía – Cuaderno de divulgación para el usuario, que tiene como objeto la promoción de los sistemas domóticos. En él se comienza por definir que es la domótica, y se enumeran los principales elementos con los que puede contar así como las preinstalaciones necesarias para poder implementar los sistemas en el futuro con ejemplos prácticos y sencillos, este cuaderno lo que se quiere conseguir es transmitir la información necesaria para crear un estilo de buenas prácticas en el sector y generar confianza en el potencial usuario.
Es de todos sabido que los sistemas domóticos se centran en el control integrado de los elementos de una instalación y que se han basado desde sus inicios en cuatro ejes de desarrollo:
• Gestión técnica de la energía.
• Seguridad de las personas, animales y bienes.
• Confort.
36

• Comunicación del sistema y al sistema mediante el uso de redes de telecomunicación externas.
Me es grato comprobar como, cada día más, se está relacionando directamente el Confort con las necesidades del usuario, y como cada día más, las empresas tienen en cuenta la diversidad funcional de los usuarios, relacionando directamente este punto con las personas con alguna discapacidad.
Las viviendas, hoy en día, disponen de un gran número de equipos y sistemas, principalmente autónomos no conectados entre ellos, y redes como la telefonía, los sistemas de acceso, la televisión, las redes de datos (cableados e inalámbricos), electrodomésticos, equipamiento de audio y video, calefacción, aire‐condicionado, seguridad, riego, iluminación, etc. Con lo que el manejo y gestión de todos ellos es complicado y “farragoso” generalmente.
Quizás es el momento de pensar en la obtención de un sistema domótico accesible, capaz de facilitar las acciones en el día a día a las personas mayores y/o dependientes o con alguna discapacidad. El conseguir manejar los diferentes elementos de la vivienda desde un único punto mediante un interface amigable de fácil manejo, ajustado a la movilidad y capacidad del usuario, que consiga que las puertas, ventanas, persianas y demás elementos se abran con la sola presencia de una persona, o que las camas y los armarios se regulen en altura, o que se puedan automatizar las rutinas y facilitar las actividades de la vida diaria, dando la posibilidad de recibir apoyo desde el exterior de forma automática, puede suponer una solución que transforme una tarea complicada en una acción fácil de realizar. Gracias a la Domótica, personas que habitan en soledad y tienen problemas de movilidad, logran tener una mayor comunicación con el exterior, facilitando una mayor comunicación con la familia, los médicos o con un servicio de teleasistencia. Obteniendo la posibilidad de una monitorización de los hogares donde se puedan analizar las variaciones en los hábitos de los usuarios de acuerdo con sus características individuales, mediante un sistema configurable, que puede servir como punto de partida que les permita seguir viviendo en su domicilio con mayor sensación de libertad e independencia y un alto nivel de seguridad.
En conclusión las tecnologías aplicadas en el entorno de las personas mayores, con movilidad reducida o con discapacidad, claramente mejoran su autonomía personal y su calidad de vida, siempre que se cumpla con ciertos parámetros:
• El usuario debe sentir que tiene el control sobre el sistema, siendo fundamental la fiabilidad y seguridad del mismo.
• Los interfaces de usuario deben seguir el principio del diseño para todos y ser fácilmente configurables y adaptables a las capacidades del usuario.
Cuando consigamos que la tecnología cotidiana esté perfectamente integrada en el entorno: volviéndose invisible para el usuario, con una infraestructura de comunicaciones móvil/fijo interactiva y sin transiciones; cuando dispongamos de sistemas fiables y estables e interfaces naturales, cuando los espacios sean ínteroperables y sean interfaces en sí mismos (espacios inteligentes), alcanzaremos una fácil comunicación humana, ayudando a combatir el aislamiento y aportando soluciones de apoyo, mejorando la transmisión de valores culturales y
37

38
sociales, contribuyendo a construir conocimiento y obteniendo un espacio de confianza y seguridad, tendremos un mejor lugar donde vivir consiguiendo el paradigma denominado “Inteligencia ambiental”.

Dispositivos hápticos: Una forma de realizar la interacción hombremáquina
Mary Monroy, María Oyarzabal, Manuel Ferre, Salvador Cobos, Jordi Barrio y Javier Ortego
Universidad Politécnica deMadrid E.T.S. de Ingenieros Industriales
Dpto. Automática, Ing. Electrónica e Inf. Industrial.
INTERÉS DE LAS INTERFACES HAPTICAS
La destreza de la mano humana a la hora de interactuar con su entorno le permite manipular una amplia variedad de formas y tamaños, realizar tareas complejas, y adaptar su posición respondiendo a los cambios requeridos por la tarea que realiza.
Esto se debe en parte a la estructura física de las manos (múltiples dedos con varios grados de libertad) y en parte a nuestras sofisticadas capacidades de control. En gran medida, esta capacidad de control se basa en la percepción de fuerzas y sensaciones en el contacto dedo‐objeto. De hecho, cuando a una persona se le priva de información táctil mediante entumecimiento de los dedos por anestesia o frío, se puede observar gran torpeza en los movimientos, aún cuando sus capacidades motoras permanezcan intactas.
Cuando se emplean las manos para explorar y manipular un objeto, la información del sentido del tacto, localizada en los receptores de la piel, se combina y coordina con información del movimiento localizada en músculos, tendones y articulaciones. Esta información juega un papel fundamental en el agarre y manipulación de objetos. Los dedos deberán ejercer la fuerza necesaria para mantener sujeto el objeto pero sin sobrepasar los limites que lleguen a romperlo.
Si en la manipulación, a través de teleoperación o en entornos virtuales, queremos aproximarnos a la destreza de la mano humana, es necesario conocer qué información se requiere para realizar diversas tareas, estudiar cómo se percibe esta información en el manipulador remoto, y encontrar el modo de enviarla al operador.
Las interfaces hápticas son dispositivos que presentan información táctil y de fuerza a un operador humano que está interactuando con un objeto real o simulado a través de un ordenador. Pueden permitir al usuario tocar el objeto para sentir sus propiedades (textura, rigidez, forma…), o pueden servir para manipular el objeto directamente [1]. Estas interfaces son maestros que controlan dispositivos esclavos (telerrobótica) o proporcionan medios para interactuar con un entorno virtual generado a través de un ordenador.
El teclado y el ratón del ordenador son las interfaces hápticas más sencillas que miden los movimientos del usuario. Aplican fuerzas al usuario en el momento del contacto pero éstas no
39

están controladas por ningún programa, por lo que se las conoce como interfaces hápticas pasivas. Las interfaces hápticas activas, como la que presentamos en este artículo, disponen de sensores y actuadores de forma que, además de leer la posición y movimientos del usuario, le transmiten las fuerzas resultantes de su interacción con el entorno, permitiéndole percibir y controlar los objetos virtuales.
La interacción entre el operador y el entorno virtual es bidireccional, midiéndose la posición o fuerza de la mano del operador, y realimentando posición o fuerza al operador a través del ordenador (Fig.1). El hecho de que haya una comunicación bidireccional entre el operador y el entorno virtual diferencia a estas interfaces de otras modalidades de realimentación, como la visual o auditiva, que son unidireccionales [2].
Figura 1. Interacción bidireccional entre el operador y el entrono virtual.
El sistema requiere un dispositivo mecánico, con el que el usuario interactúa con el entorno y que debe generar las fuerzas y momentos que el entorno provoca sobre el usuario. Generalmente van equipados de un dispositivo gráfico, que es el encargado de mostrar el escenario virtual o remoto y proporciona, por tanto, la realimentación visual. Asimismo es preciso tener un software de control que calcule las fuerzas de contacto y genere las señales de consigna para los actuadores.
A la hora de diseñar una interfaz háptica se deben analizar las distintas características técnicas, con el fin de hacer una selección óptima y que esté adecuada al uso de la interfaz. Las principales especificaciones técnicas que se deben considerar son:
• Estructura mecánica. Existen básicamente dos tipos de estructuras: las estructuras serie y las paralelas, aunque también son posibles combinaciones híbridas entre ambas arquitecturas
• Tipo de actuadores. Éstos irán adecuados al margen de fuerzas a aplicar y a las posiciones a las que se deba acceder.
• Número de grados de libertad. Son el número de desplazamientos o rotaciones que permite el dispositivo y deben ser acordes a los grados de libertad que el usuario emplea en una tarea.
• Espacio de trabajo. Es el volumen o área dentro del cual el usuario puede posicionar el efector final y dentro del cual el dispositivo puede imponer restricciones a ese movimiento.
40

• Rango de fuerzas. Es el rango formado por los niveles máximo y sostenido de fuerzas que puede ejercer el dispositivo. Los valores máximos de fuerza controlable apretando con la mano varían desde 228 N para la mujer hasta los 400 N para el hombre. Sin embargo, si en vez de hacer un agarre fuerte se realiza un agarre de precisión, hay que hacer notar que las máximas fuerzas para los dedos pulgar e índice es de 50 N, mientras que para el resto es de 40 N.
Sin embargo, para que el confort del operador esté dentro de unos niveles de seguridad admisibles, las fuerzas ejercidas por la interfaz no deben exceder del 15% de los valores máximos anteriormente citados.
• Fricción aparente. Las pérdidas por fricción en una interfaz háptica deben ser inferiores a la mínima fuerza o par que el usuario es capaz de percibir mientras interactúa con el entorno virtual. En caso contrario, la interfaz dejaría de ser “transparente”, pues no se podría diferenciar si las fuerzas percibidas por el usuario provienen de la realimentación deseada o de las pérdidas mecánicas del dispositivo en sí. Los valores de fricción aparente deben mantenerse en valores por debajo del 7% de las fuerzas y del 12,7 % de los pares aplicados en la interacción con el entorno virtual.
• Rigidez. La rigidez de una interfaz háptica se relaciona íntimamente con la habilidad de la misma para generar restricciones al movimiento del operador dentro del entorno virtual, impidiendo que se penetre dentro de los distintos sólidos virtuales, y permitiendo, de este modo, su inspección y manipulación.
La rigidez máxima de una interfaz depende de la fuerza máxima que pueda desarrollar y del mínimo desplazamiento que detecte. Los estudios demuestran que, en la práctica, una interfaz debe proporcionar una rigidez mínima de 20 N/m para que el operador pueda recorrer adecuadamente una superficie virtual.
• Inercia aparente. La inercia aparente es la mínima masa percibida por el usuario cuando mueve el dispositivo háptico a través del espacio. En el caso de que la inercia aparente del dispositivo fuese demasiado alta, podría causar en el usuario una fatiga excesiva. Un estudio piloto indica que son aceptables masas de 50 gramos para operaciones que durasen media hora o menos, si bien, estudios recientes recomiendan valores cercanos a los 100 gramos.
• Transparencia. Expresa la capacidad del sistema para seguir el movimiento del usuario rápidamente y sin oposición. Es decir, el usuario no debe percibir ninguna fuerza sobre la mano en tanto que no exista interacción física con el entorno virtual.
• Ancho de banda del dispositivo. Muestra el rango de frecuencias dentro del cual la interfaz háptica es capaza de reflejar fuerzas de forma aceptable [4].
La calidad de una interfaz háptica se evalúa generalmente en términos de lo que es capaz de transmitir al usuario (texturas, geometría, deformación de superficies…) y el ancho de banda del dispositivo [4]. Depende de los componentes que forman la interfaz (sensores y actuadores) y del ancho de banda del conjunto, que a su vez depende de la transmisión de datos y los cálculos. La evaluación de una interfaz es importante para juzgar su efectividad y
41

para poder aislar posibles problemas. No obstante, es difícil hacer generalizaciones; las interfaces deben ser juzgadas para un determinado conjunto de tareas para las que hayan sido diseñadas.
INTERFACES HAPTICAS MULTIDEDO
En los últimos años, se ha registrado un notable incremento en el desarrollo de interfaces hápticas multidedo basadas en estructuras tipo guantes, exoesqueletos o los manipuladores que se sostienen suspendidos en el techo, Los sistemas sostenidos sobre el techo o un muro no son sistemas portátiles, mientras que los exoesqueletos y las interfaces que actúan sobre la mano del operador si suelen serlo.
Es importante destacar un factor que influye enormemente en el desempeño de las interfaces hápticas, en sistemas como exoesqueletos donde el usuario debe soportar todo el peso de la estructura sobre su mano o el brazo se dificulta la manipulación de objetos y el desarrollo de tareas colaborativas. En estos casos los actuadotes van colocados sobre la palma de la mano y las fuerzas que alcanzan a desarrollar sobre cada dedo es de aproximadamente 10 N. Sin embargo los grados de libertad actuados suelen ser reducidos.
Tabla 1. Interfaces hápticas
GDL NOMBRE CARACTERISTICAS CREADORES
6 PHANToM
• Morfología serie • 3 primeros grados de posición son activos • Los 3 últimos del dedal son pasivos
MIT por Massie y Salisbury
7 SPIDAR‐G
• Basadas en cables de acero muy finos para reflejar las fuerzas en el efector final.
• 3 GDF para translación, 3 GDF para rotación, y 1 GDF para agarre.
Instituto de Tecnología de Tokio
7 SARCOS
• La cinemática del brazo parecida a la del brazo humano.
• El ancho de banda del brazo varía entre los 10Hz del hombro y los 100Hz de la muñeca.
Sarcos Co.
7 FREFLEX
• Desarrollado para aplicaciones militares. • Los actuadores se encuentran en una consola vertical amarrada al suelo.
Desarrollado por el ejercito
10 ViSHarD 10
• Sistema hiper‐redundante. • Sostenido en el techo, o en el suelo. • Posee en gran espacio de trabajo.
Universidad técnica de Munich y Berlín
5
EXOS Force ArmMaster,
• 3 GDL en parte superior del brazo. • 2 GDL se sitúan en la parte baja del brazo.
EXOS Co.
8 SAFIRE
• Capaz de aplicar fuerzas a los dedos pulgar e índice y a la muñeca del operador.
• 3 GDL en cada dedo y 2 mas en la muñeca.
EXOS Co.
42

CyberGlove.
• Posee 18 ó 22 delgados medidores de esfuerzo.
• Sensores rectangulares para medir la flexión, y en forma de U para medir la abducción
Immersion Co
6
FREEDOM 6S
• Nivel de fricción de aproximadamente 0.1 N en cada dirección.
• La inercia resultante en el extremo varía entre 0.09 y 0.15 Kg.
MPB Technologies
6 brazo 15 mano
HIRO‐II • Presenta fuerza y sensación táctil en la yema de los 5 dedos de la mano.
• Debe seguir los movimientos de la mano del operador.
Universidad Gifu, Japón
CyberTouch
• Los estimuladores táctiles se unen a cada yema del dedo y a la palma del usuario para proporcionar pulsos o vibración sostenida.
• Pueden ser utilizados individualmente o en combinación para producir patrones táctiles sincronizados.
• Frecuencia de vibración: 0 – 125 Hz.
Immersion Co
6 El Magister‐P
• Estructura paralela • Capaz de reflejar fuerzas y/o posiciones • Funciona como display de impedancias o de admitancias
Dr. José María Sabater
Ejemplos interfaces hápticas multidedo
• El PHANToM: (Figura 2).Interfaz háptica con morfología serie que finaliza con un dedal donde el usuario puede introducir el dedo. De los seis grados de libertad de la interfaz, los tres grados de posición son activos y corresponden a las primeras articulaciones del brazo y los tres últimos del dedal son pasivos. El PHANToM utiliza 3 motores dc brushless con encoders ópticos. Las transmisiones se realizan con cables y poleas, con un mecanismo de reducción que mezcla dos motores capstan con un único cable. La arquitectura del PHANToM permite un desacople de los tres actuadotes, simplificando los cálculos para el control.
• SPIDAR (Space Interface Device for Artificial Reality) (Figura 2) [5]: El usuario inserta sus dedos en un dedal sujetado por cuatro cables. Utilizando un sistema de poleas y motores los cables se utilizan para medir la posición de los dedos y los cables tensados se utilizan para reflejar las fuerzas calculadas. En el prototipo inicial de un solo dedal la resolución de los encoders era de 0.503 mm (con poleas de 16mm). La versión SPIDAR II proporciona fuerzas a los dedos pulgar e índice y está utilizándose con éxito en experimentos con operaciones de “pick&place”. En la versión SPIDAR‐8 permite que un usuario utilice 8 dedos, 4 en mano izquierda y 4 en la mano derecha, para manipular los objetos virtuales con la reflexión de la fuerza.
43

(a)
(b)
(c)
44

(d)
Figura 2. (a) PHANToM, (b) SPIDAR‐8, (c) Exos ArmMaster, (d) Rutgers Master II
• EXOS Force ArmMaster: (Figura 2) Esta interfaz dispone de 5 grados de libertad. Una estructura suspendida por encima del hombro proporciona 3 grados de libertad a la parte superior del brazo, mientras que los otros 2 grados de libertad se sitúan en la parte baja del brazo.
• El RUTGERS MASTER [6]: (Figura 2). Se diferencia de otras interfaces hápticas de tipo guante, en que los actuadores se sitúan en la parte frontal de la mano. El diseño permite que los actuadores desarrollen su potencia directamente sobre la mano del usuario, evitando los problemas originados por las transmisiones. Los actuadores son micro‐cilindros de tipo neumático y se colocan formando una “L” sobre la palma de la mano.
• CYBERGLOVE: (Figura 3). Posee de 18 ó 22 delgados medidores de esfuerzo montados sobre un fino tejido elástico de nylon. El tejido elástico no cubre la superficie palmar (tampoco la punta de los dedos en el modelo de 18 sensores) lo que permite una mejor ventilación. Los sensores son rectangulares para medir la flexión, y en forma de U para medir la abducción. Dos de los sensores se utilizan para medir el cabeceo (pitch) y guiñada (yaw) de la muñeca.
(a)
45

(b)
(c)
Figura 3. (a)CyberGlove, (b) CyberGrasp, (c) CyberTouch
• CYBERGRASP: (Figura 3) El único guante háptico disponible comercialmente, fabricado por Immersion Co. Consiste en una estructura exoesquelética fijada a la parte posterior de la mano, que es accionada por unos actuadores instalados fuera de ésta, en una caja de control, con el objetivo de facilitar su manejo aligerando su peso, de aproximadamente 450 gr. La fuerza máxima que puede aplicar sobre cada dedo es de 12N.
• CYBERTOUCH: (figura 2) [7] Estos guantes son mucho más ligeros que los que poseen reflexión de fuerzas y emplean normalmente vibradores electromecánicos para proporcionar datos de texturas o rugosidades. La colocación de los actuadores es más simple que en aquellos, lo que facilita su diseño, reduciendo a su vez su coste de producción. Pesa solamente 144gr. Usa 6 vibradores electromecánicos situados en la parte posterior de los dedos y en la palma de la mano. Estos actuadores producen vibraciones de 0‐125Hz, alcanzando unos 1.2N de fuerza a 125Hz
• HIRO II: [8] (figura 4). Presenta fuerza y sensación táctil en las cinco yemas de los dedos de la mano humana. Se diseña para ser totalmente segura y similar al miembro superior humano en forma y capacidad de movimiento. El mecanismo posee 6 GDL en el brazo y 15 GDL en la mano. La interfaz se pone frente a al mano del ser humano, la dificultad
46

que presenta es controlar la interfaz háptica porque debe seguir las actitudes de la mano del operador.
Cuando el operador mueve la mano, La interfaz háptica sigue el movimiento de los dedos del operador y presenta la sensación de fuerza. El operador siente apenas una pequeña sensación opresiva porque la parte juntada entre la mano humana y la interfaz háptica es solamente la yema de los dedos del operador. La mano háptica empieza por la muñeca pero no incluye en su extremo la yema de los dedos, una base de la mano y cinco dedos hápticos forman la mano háptica. Los dedos hápticos se diseñan similares a los dedos humanos en geometría y capacidad del movimiento.
Figura 4. Hiro II
• ViSHaRD 10: (Figura 5) [9] Este sistema hiper‐redundante proporciona reflexión de fuerzas en la mano del operador, se ha desarrollado para superar desventajas comunes de los sistemas comerciales siendo este una interfaz háptica de alta fidelidad. Posee en gran espacio de trabajo en forma cilíndrica de 1.7m de diámetro y una carga útil de 7Kg, la cual es lo suficientemente grande para reflejar fuerzas. El dispositivo se puede ensamblar en el techo o en el suelo, con ambas posibilidades se obtienen los 6 grados de libertad en el efector final, permitiéndole al operador interactuar en un escenario virtual.
(a)
47

(b)
Figura 5. (a). ViSHard 10, (b). SARCOS Dextrous Arm Master
• El SARCOS: (Figura 5). [10] Desarrollado para aplicaciones submarinas de teleoperación. La cinemática del brazo se asemeja a la del brazo humano. La muñeca incorpora una unidad modular donde el usuario introduce su mano. Este módulo para la mano tiene menos grados de libertad que la mano y tan solo utiliza los dedos pulgar e índice para reflejar operaciones de agarre de piezas. En total el ancho de banda del brazo varia entre los 10Hz del hombro y los 100Hz de la muñeca. El par máximo que puede reflejar es de 97.7 N‐m para el hombro, 50 N‐m para el codo, 22 N‐m para la muñeca y 5.5 N‐m para la mano.
• EL MAGISTER‐P (figura 6) [11]: Es un dispositivo háptico de 6 grados de libertad y estructura paralela capaz de funcionar como interfaz kinestésica en cualquier tipo de implementación de un esquema de control bilateral (es capaz de reflejar fuerzas y/o posiciones).
Esta arquitectura permite cerrar un lazo de control de tiempo real en la zona local de un esquema de teleoperación, pudiendo así programar esquemas que aseguren la estabilidad del maestro. El desarrollo de los modelos y algoritmos necesarios para el control de dicho dispositivo, le permite funcionar como display de impedancias o como display de admitancias. La utilización de una formulación elegante basada en la dinámica multicuerpo ha permitido la obtención de los modelos cinemáticos y dinámicos necesarios para el diseño de las diferentes estrategias de control.
Figura 6. Maestro MAGISTER‐P
48

MASTER FINGER
Como alternativa a las estructuras multidedo que existen en la actualidad, presentamos un dispositivo que se conecta a cada dedo y permite la exploración de forma natural y pudiendo realimentar fuerzas en cada dedo con varios grados de libertad.
La interfaz está constituida por una estructura serie‐paralelo que le permite tener un gran campo de alcance pero que sin embargo le confiere una reducida inercia. El dispositivo tiene seis grados de libertad, de los cuales, los tres primeros están actuados y los tres últimos no están actuados pero sí se que mide su posición [4].
El “dedal”, donde el usuario inserta su dedo para poder interactuar con el entorno, está provisto de unas tiras resistivas que miden las fuerzas que el usuario está ejerciendo y que sirven para cerrar bucles en fuerza y poder tener un control adecuado.
Cinemática del dispositivo
Cinemática directa
Se presenta a continuación la cinemática de los dispositivos que irán asociados a cada dedo. El primer GdL permite un giro vertical de la mano (aproximadamente correspondiente al movimiento de desviación radio‐cubito de la muñeca) mientras que los demás grados de libertad están asociados al movimiento del dedo, propiamente dicho. De entre estos grados de libertad los más interesantes de estudiar son los dos primeros, que actúan de forma paralela, evitando así la inercia provocada por el movimiento de arrastre de los motores. Una vez resuelta la cinemática de estos dos GdL el estudio de la cadena completa se puede realizar como la de un mecanismo serie con el método de Denavit‐Hartenberg, que ha sido explicado ampliamente en la literatura y que por esta razón se omite.
En cuanto a los grados de libertad que forman una estructura paralela, se muestran en la figura 7 los eslabones que la forman y los parámetros dimensiónales y angulares que se emplearán.
Figura 7. Esquema de los tres primeros GdL
El punto P donde se encuentra el cuarto GdL viene expresado según las siguientes ecuaciones:
49

Los ángulos conocidos son ϕ y θ ya que son medidos por los encoders que llevan los motores,
por lo que es necesario hacer una transformación. De los eslabones (ϕ, θ, α y ψ), únicamente dos son independientes, y tenemos dos ecuaciones:
Manejando apropiadamente las ecuaciones podemos llegar al valor de cualquiera de los
parámetros en función de los otros dos, por ejemplo podemos obtener el valor de ψ en función de θ y ϕ:
Donde los parámetros B, A y b son funciones dependientes de las longitudes de los eslabones y
de ϕ y θ.
Jacobiano
El modelo diferencial que relaciona velocidades articulares con cartesianas se formula a través de la matriz jacobiana, además de que también relaciona los pares articulares con las fuerzas ejercidas en el efector final. La importancia radica en su empleo para el cálculo de los pares necesarios en los motores para que el usuario experimente una fuerza determinada.
La matriz jacobiana se obtiene derivando la siguiente expresión:
50

DEDAL
Para el dedal utilizamos un diseño que encierra completamente el dedo del operador, asegurando que la interfaz siempre siga los movimientos del usuario. Cuatro sensores Flexiforce (Tekscan Inc., Boston, MA) se incluyen en el dedal para estimar las fuerzas normales y tangenciales ejercidas por el usuario. La fuerza normal se obtiene con un sensor situado en el extremo del dedo, y las tangenciales se estiman a partir de las medidas de los sensores situados en los laterales. La figura 3 muestra un prototipo del dedal con cuatro sensores.
Figura 8. Prototipo del dedal
MASTER FINGER 2
Este dispositivo fue desarrollado con el objetivo de permitir que el usuario interactué en escenarios virtuales de una manera fácil, cómoda y ligera. Debido a que el peso de la interfaz no lo soporta la mano del usuario y a la baja inercia de sus componentes se puede manipular adecuadamente los objetos utilizando los dedos índice y pulgar. Esta interfaz posee 6 grados de libertad en cada dedo y gracias a su diseño mecánico ofrece una alta capacidad de movimiento obteniendo un amplio espacio de trabajo.
51

Figura 9. Master finger 2
REFERENCIAS:
[1] Biggs, S.J. & Srinivasan, M.A. (2002). Haptic interfaces. In K.M. Stanney (Ed.), Handbook of virtual environments: Design, implementation, and applications (pp. 93‐115). Mahwah, NJ: Erlbaum.
[2] Jones, L.A. & Lederman, S.J. (2006). Human hand function. New York: Oxford University Press.
[3] González, C., Ferre, M., Barrio, J., Cobos, S., Aracil, R. Interfaz Háptica Multidedo. XXVII Jornadas de Automática.2006
[4] Lawrence, D. A., Pao, L.Y., Salada, M. A., & Dougherty, A. M. (1996). Quantitative experimental analysis of transparency and stability in haptic interfaces. Proceedings of ASME Dynamic Systems and Control Division, 59, 441‐449.
[5] [Ishii 1993] Ishii, M., Sato, M. (1993). “A 3D Interface Device with Force Feedback: A Virtual Work Space for Pick‐and‐Place Tasks.” In IEEE (Ed.) VRAIS ’93 , pp. 331‐335 , IEEE , Seattle.
[6] [Burdea 1994] Burdea, G. and Coiffet, P. 1994. “Virtual Reality Technology”. New York: John Wiley and Sons, Inc.
[7] Virtual Technologies, “CyberTouch.” Company brochure, Palo Alto, CA, 1998. Electronic version: http://www.virtex.com.
[8] H. Kawasaki, T. Mouri, M. O.Alhalabi, Y. Sugihashi, Y. Ohtuka, S. Ikenohata, K. Kigaku, V. Daniulaitis, K. Hamada, and T. Suzuki, “Development of Five‐Fingered Haptic Interface: HIRO‐II”, ACM International Conference Proceeding Series;ICAT 2005, Vol. 157 pp 209‐214, 2005.
[9]. M. Ueberle, N. Mock, A. Peer, C. Michas, and M. Buss, "Design and Control Concepts of a Hyper Redundant Haptic Interface for Interaction with Virtual Environments", Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, Workshop on Touch and Haptics, Sendai, Japan, 2004.
52

53
[10] A. Nahvi, D. Nelson, J. Hollerbach, and D. Johnson. Haptic manipulation ofvirtual mechanisms from mechanical CAD designs. In Proc. of IEEE Conference on Robotics and Automation, pages 375–380, 1998.
[11] J. M. Sabater. “Desarrollo de una interfaz kinestésica paralela y experimentación en control de sistemas hápticos y teleoperados” Tesis Doctoral Universidad Miguel Hernández.2003

Experiencias de Fundación Vodafone España para el apoyo a las personas dependientes
Experiencias de Fundación Vodafone España para el apoyo a las personas dependientes
Mari Satur Torre Calero y Puerto Asensio Collado Mari Satur Torre Calero y Puerto Asensio Collado Fundación Vodafone España Fundación Vodafone España
La Fundación Vodafone España es una institución de investigación, sin ánimo de lucro cuyo principal objetivo es acercar a la Sociedad los nuevos avances en las Tecnologías de la Información y las Comunicaciones.
La Fundación Vodafone España es una institución de investigación, sin ánimo de lucro cuyo principal objetivo es acercar a la Sociedad los nuevos avances en las Tecnologías de la Información y las Comunicaciones.
La Fundación Vodafone España se constituyó en 1995 y desde entonces se ha destacado por su compromiso en la difusión de las nuevas tecnologías de la Información y la Comunicación, así como la promoción del uso de las mismas y, en especial, de las relacionadas con las comunicaciones móviles, para la integración social y laboral de los grupos más vulnerables y con necesidades especiales.
La Fundación Vodafone España se constituyó en 1995 y desde entonces se ha destacado por su compromiso en la difusión de las nuevas tecnologías de la Información y la Comunicación, así como la promoción del uso de las mismas y, en especial, de las relacionadas con las comunicaciones móviles, para la integración social y laboral de los grupos más vulnerables y con necesidades especiales.
Para ello, desarrolla un amplio programa de actividades que se adapta a las nuevas inquietudes que la propia Sociedad le hace llegar. Entre sus líneas de actuación podemos destacar:
Para ello, desarrolla un amplio programa de actividades que se adapta a las nuevas inquietudes que la propia Sociedad le hace llegar. Entre sus líneas de actuación podemos destacar:
• el desarrollo de proyectos de innovación aplicada a la integración y teleasistencia a colectivos vulnerables (discapacitados, personas mayores, enfermos crónicos, ... ),
• el desarrollo de proyectos de innovación aplicada a la integración y teleasistencia a colectivos vulnerables (discapacitados, personas mayores, enfermos crónicos, ... ),
• la promoción de formación en nuevas tecnologías y su repercusión en los distintos ámbitos de la Sociedad, no sólo a través de sus programas de Master y Postgrado en Universidades, sino también con la organización de seminarios que se constituyen como verdaderos puntos de encuentro para el debate, aprendizaje y la comunicación directa,
• la promoción de formación en nuevas tecnologías y su repercusión en los distintos ámbitos de la Sociedad, no sólo a través de sus programas de Master y Postgrado en Universidades, sino también con la organización de seminarios que se constituyen como verdaderos puntos de encuentro para el debate, aprendizaje y la comunicación directa,
• la difusión a través de publicaciones especializadas en temas técnicos, sociales, jurídicos y éticos relacionados con el sector de las TIC.
• la difusión a través de publicaciones especializadas en temas técnicos, sociales, jurídicos y éticos relacionados con el sector de las TIC.
Más información en www.fundacion.vodafone.esMás información en www.fundacion.vodafone.es
Innovación al Servicio de las PERSONAS
Dentro del Área de Innovación, la Fundación Vodafone España lleva a cabo proyectos que comprenden las siguientes líneas de trabajo:
• e‐Inclusión, tanto para el desarrollo de ayudas técnicas como en la promoción del Diseño para todos. Dirigidos a eliminar las barreras de comunicación y acceso a las TIC de colectivos dependientes.
55

• e‐Salud y Telemedicina, proyectos dirigidos a la promoción de estilos de vida saludables, prevención de enfermedades, seguimiento de enfermedades crónicas y mejoras en los modelos de atención sanitaria gracias al uso de las TIC.
• Vida independiente y teleasistencia, a colectivos vulnerables incluyendo en este grupo las aplicaciones para mayores, enfermos crónicos.
En todos sus proyectos, la Fundación Vodafone España promueve que la tecnología se ponga al servicio del usuario, y sea ésta la que se adapte a sus necesidades y no al contrario. Para ello, colabora estrechamente con las organizaciones más representativas de los intereses de los usuarios finales a los que van dirigidos los resultados de estos desarrollos innovadores.
Para el desarrollo de estas iniciativas y proyectos cuenta con la colaboración de los principales grupos de investigación de Universidades españolas y también participa en proyectos a nivel europeo.
En los siguientes apartados se describen algunos de los proyectos desarrollados y los nuevos retos planteados en el corto y medio plazo.
Nuevas Tecnologías para la e‐Inclusión
Proyectos para Personas Sordas
En colaboración con la CNSE (Confederación Estatal de Personas Sordas), y su Fundación, la Fundación Vodafone España ha impulsado el desarrollo de proyectos que han contribuido a eliminar las barreras de comunicación que las personas sordas encuentran en su día a día.
Entre ellos, destacar que la fructífera experiencia del Teléfono de Textos para móvil marcó un hito. El desarrollo de una aplicación específica que permitía la comunicación en modo texto (“chat”) entre dos terminales Nokia de la serie 9000 en la primera fase y luego entre terminales tipo PDA, utilizando la red GPRS y/o un ordenador conectado a internet contó en todo momento con el apoyo del IMSERSO a través del CEAPAT y fue desarrollado por investigadores de las Universidades Politécnia y Autónoma de Madrid bajo las especificaciones de la FCNSE.
Sin embargo, la comunicación en modo texto presenta algunas limitaciones e inconvenientes para aquellas personas cuya lengua natural es la lengua de signos. En ese sentido, los trabajos actuales se centran en la colaboración para la realización del primer diccionario enciclopédico para Lengua de Signos Española (LSE): DILSE o Tesoro de la LSE cuyo contenido estará en breve disponible en formato DVD, a través de Internet y a través del teléfono móvil.
La comunicación en LSE mediante videollamada o videoconferencia a través de los servicios de comunicaciones móviles de las redes 3G/HSDPA también está siendo objeto de estudio y pruebas en estos momentos para poder ofrecer una solución adecuada a las necesidades de este colectivo.
56

Proyecto HeadDev para Interacción con el Ordenador
El desarrollo software es capaz de mejorar la calidad de vida de las personas y muy especialmente en el ámbito de la discapacidad.
HeadDev o Ratón de Gestos es un paquete software que aplica las técnicas de visión por computador para poder sustituir una de las interfaces más comunes para interactuar con el ordenador: el ratón. Esta solución es no invasiva y está basada en los dispositivos habituales de un ordenador personal (teclado y webcam convencional). Con ello se permite interactuar completamente persona‐ordenador sin utilizar manos, cables, sensores, etc.
HeadDev está especialmente dirigido a personas con movilidad limitada en manos o brazos: esclerosis lateral amiotrófica, esclerosis múltiple, parálisis cerebral, lesiones medulares, distrofia muscular...
Este proyecto ha sido desarrollado por investigadores de la Universidad de Baleares y la empresa TAGRV. Ha contado con el apoyo de la Fundación Vodafone España y la Fundación para la Integración de Discapacidades en Red.
Los resultados de este proyecto recibieron el pasado mes de marzo el Premio Fundetec en la categoría Mejor Proyecto de Entidad No Lucrativa destinado a Ciudadanos.
El software y el manual de usuario pueden descargarse de la página web www.fundacion.vodafone.es
Tecnologías Móviles para el Bienestar y la Salud
En la comunicación médico‐paciente, un móvil puede aportar un valor añadido a ambas partes. Se pueden obtener respuestas directas y rápidas, con los datos y parámetros sobre las dolencias y tratamientos, gestionados vía SMS o a través de una sesión WAP, de una manera rápida y eficiente, y lo que es más importante “tranquilizante y humana”, que dote de una completa y continua sensación de seguridad. Con la llegada de las nuevas redes 3G/ HSDPA, que permiten la transmisión de datos a alta velocidad, se está creando una nueva forma de hacer medicina, más práctica; donde los pacientes con más riesgo son monitorizados a distancia y se evitan las esperas y agobios rutinarios.
Proyectos con el Instituto de Salud Carlos III
La Fundación Vodafone España colabora desde su constitución con el Instituto de Salud Carlos III del Ministerio de Sanidad. Fruto de esta colaboración, destacan los resultados del proyecto Airmed. Este proyecto centró su atención en el seguimiento de pacientes con patologías crónicas (riesgo cardiovascular, enfermos de asma, tabaquismo y patologías del sueño y personas mayores con deterioro cognitivo).
Cerca de 800 pacientes participaron en el proyecto Airmed Cardio. Los pacientes, en su entorno habitual y con un teléfono móvil transmitían información sobre del pulso, tensión arterial, peso, ECG y completaban un cuestionario WAP. Esta información era almacenada y procesada en un servidor central y consultada en un entorno seguro por el médico a través de un interfaz Web para el seguimiento del tratamiento.
57
Los resultados de estos ensayos clínicos demostraron las ventajas de esta solución respecto a la adherencia al tratamiento y en la mejora del estado de los pacientes.
Con la experiencia adquirida se trabaja ahora en una estrategia de uso de las TIC para la prevención y la promoción de la vida independiente. Se plantea en esta nueva etapa, un programa para el desarrollo de nuevos servicios para el cuidado personal que integren la atención social y sanitaria, alineada con el reto del cambio demográfico que prevé un aumento en el número de adultos con discapacidades y enfermedades crónicas como consecuencia del alargamiento de la vida.
Proyecto MyHeart
Más de 30 organizaciones de 11 países participan en este proyecto europeo del área de e‐Salud del VI Programa Marco. Su principal objetivo es prevenir las enfermedades cardiovasculares mediante la prevención y el diagnóstico temprano. El uso de prendas inteligentes que incorporan sensores y dispositivos que permiten enviar información sobre señales vitales a un teléfono móvil y éste a su vez a un servidor central donde son procesadas, permite a los profesionales de la salud un seguimiento continuado de los parámetros de los usuarios tanto para tratamientos médicos como para programas de entrenamiento.
El proyecto ha definido 4 escenarios de uso:
• “Activity Coach”. Dirigido a personas sanas que buscan el máximo rendimiento en sus sesiones de práctica deportiva en cualquier momento y en cualquier lugar, cuidando el estado de salud.
• “Take Care”. para mayores de 40 años en buen estado de salud y personas que poseen algún factor de riesgo (estrés, sobrepeso, desórdenes del sueño, inactividad), su objetivo principal es la prevención.
• “Neurological Rehabilitation”. para personas que han sufrido algún episodio cardiovascular o cerebrovascular agudo. Su objetivo será buscar nuevas oportunidades para la realización de una rehabilitación intensiva en el hogar, reduciendo el coste para el sistema nacional de salud.
• “Heart Failure Management”. Para el seguimiento de pacientes crónicos.
Durante el 2007 se realizarán las pruebas con usuarios reales.
Tecnologías Móviles para la Vida Independiente
El envejecimiento de la población en los países más desarrollados está planteando nuevos retos. Las nuevas tecnologías se proponen dentro de este contexto como el medio idóneo para mejorar la calidad de vida de las personas mayores y favorecer la vida independiente tanto para el desarrollo de las actividades de la vida diaria como para la mejora de su participación en el ámbito social.
Las soluciones tecnológicas deben ser no intrusivas y respetar la intimidad de las personas, así como las limitaciones legales y éticas.
58
No sólo el mayor debe beneficiarse de las ventajas de los nuevos servicios basados en las TIC, la figura del cuidador también es clave y por eso deben proporcionarse servicios de apoyo, información y formación de forma que se reduzca la carga de trabajo y la incertidumbre por la que atraviesa el cuidador cuando se enfrenta a la situación de dependencia de un mayor.
Todas estas y otras más, son lecciones aprendidas gracias a nuestra colaboración con Cruz Roja Española y otras asociaciones de ayuda a colectivos dependientes.
Innovación Social con Cruz Roja Española
En cuanto a la Cruz Roja Española, la estrecha relación mantenida entre ésta y la Fundación Vodafone España se ha materializado en la Fundación TECSOS, constituida al 50% por cada una de las entidades. Esta fundación ha sido el resultado de años de colaboraciones conjuntas para desarrollar las llamadas TECnologías SOcialeS.
La Fundación TECSOS nace en 2003 fruto de la colaboración y compromiso de Cruz Roja Española y Fundación Vodafone para desarrollar TECnologías SOcialeS. Esta simbiosis permite combinar la experiencia social de una de las organizaciones de mayor prestigio del mundo, con el liderazgo tecnológico del mayor operador de comunicaciones móviles a través de su Fundación en España.
Los antecedentes de esto es el desarrollo del proyecto de Teleasistencia Móvil. Su objetivo era aumentar la seguridad de las personas vulnerables proporcionándoles seguridad y asistencia en cualquier momento y en cualquier lugar, ampliando así la teleasistencia fija tradicional en la que el usuario sólo podía acceder a los servicios en el interior de su hogar.
La Teleasistencia Móvil se basa en un terminal móvil GSM con tecnología de localización GPS integrada y un botón de alarma de forma que cuando el usuario pulsa la alarma, se lanza una llamada al Centro de Teleasistencia proporcionando la identidad y localización del usuario. La experiencia piloto contó con más de 350 usuarios.
En este momento se está llevando a cabo el Proyecto ComplemenTA, orientado sobre todo a personas mayores. ComplemenTA va un paso más allá en servicios de teleasistencia complementándola con elementos de seguridad pasiva en el hogar (detección de humos, CO2, presencia, etc.) y comunicación con cuidadores y familiares a través de videoconferencia. La gran novedad de este proyecto reside en incorporar la figura del cuidador al que se proporciona confianza, apoyo e información sobre las tareas de cuidado con el objetivo de reducir la situación de ansiedad por la que atraviesan al pasar a hacerse cargo de una persona. Este año se realizará un piloto con 100 personas en distintas provincias españolas cuyos resultados se presentarán durante el año 2007.
Innovación Socio‐Sanitaria: Proyecto PLATAS
El proyecto PLATAS, Plataforma de Atención social cuenta con el apoyo del Ministerio de Industria, Turismo y Comercio a través del Plan AVANZA y se desarrolla en colaboración con Cruz Roja Española y el Instituto de Salud Carlos III.
59

Su objetivo es prevenir la dependencia, manteniendo a las personas mayores en su entorno habitual el mayor tiempo posible a través del uso de las tecnologías de la información y la comunicación. Con un espectro más amplio de servicios, entre los que se combina la teleasistencia con la telemedicina, PLATAS también pretende extender el uso de las nuevas tecnologías entre las personas mayores para mejorar su participación social.
Los servicios comprenden entre otros, prevención de riesgos a través de soluciones de seguridad pasiva, autocuidado de la salud, videoatención en el hogar, servicios de información para el mayor y sus cuidadores con consejos prácticos mediante el envío de SMS y MMS y otros servicios diseñados para mejorar su participación y de apoyo a la vida diaria.
El proyecto se desarrollará durante el año 2007 y contará con 2 pilotos de 60 usuarios en Huesca y la Palma.
El pasado mes de febrero recibió el ACCESIT en la categoría de Inclusión en la Sociedad de la Información: Mayores y Discapacitados de la I Edición de los Premios AVANZA.
Innovación en lo Cotidiano: Instituto para el Bienestar Ciudadano
El instituto es una iniciativa de la Consejería de Innovación, Ciencia y Empresa de la Junta de Andalucía en la que también participan la Universidad Internacional de Andalucía y la Fundación Vodafone España. Este centro pretende convertirse en una referencia internacional en la atención a los problemas derivados del progresivo envejecimiento de la población y las situaciones de dependencia, centrándose en el desarrollo y la aplicación de las tecnologías de la información y las comunicaciones a la mejora de la calidad de vida de los ciudadanos.
Entre sus prioridades se encuentra la generación del conocimiento necesario para garantizar el mayor grado de autonomía posible de ciudadanos que en la actualidad se encuentran en situación de dependencia por su avanzada edad o su estado de salud, en todos sus ámbitos de desarrollo (ya sea doméstico, laboral o de ocio).
Para ello, el Instituto de Innovación para el Bienestar Ciudadano, impulsará trabajos de experimentación que faciliten el desarrollo de nuevos entornos tecnológicamente asistidos y den soluciones funcionales a problemas concretos de ciudadanos con algún tipo de limitación.
Contará con un equipo de trabajo multidisciplinar formado por psicólogos, sociólogos, antropólogos, médicos, tecnólogos, informáticos o ingenieros, entre otros, que se encargarán de plantear hipótesis de trabajo para el posterior desarrollo de soluciones y mejoras en cuyo diseño y validación participarán también sus potenciales usuarios.
La Inteligencia Ambiental al Servicio de los Mayores: Proyecto PERSONA
El pasado 1 de enero de 2007 ha dado comienzo este proyecto financiado por la Comisión Europea dentro del VI Programa Marco que tiene como objetivo desarrollar una plataforma para el acceso ubicuo, instantáneo y transparente a servicios dirigidos a personas mayores y que permitan que éstas estén el mayor tiempo posible en su entorno habitual.
60

61
Para el desarrollo de estos servicios de atención continuada se han definido distintos espacios que van desde el de la propia persona hasta el de la ciudad donde vive pasando por su casa y el vecindario.
La persona estará inmersa en estos espacios y tendrá acceso a los distintos servicios gracias a las nuevas tecnologías de la micro‐nano electrónica, sistemas empotrados en tejidos inteligentes (prendas de vestir, alfombras, cortinas, …), interfaces basados en interacción natural (voz, tacto, …), biosensores, redes de comunicaciones inalámbricas (teléfono móvil) y de sensores distribuidos, así como herramientas inteligentes para la ayuda a la toma de decisión de forma automática.
En el proyecto participan más de 20 organizaciones de España, Grecia, Dinamarca, Italia y Alemania como Vodafone Italia, Fundación Vodafone España, la Universidad Politécnica de Madrid (UPM) y el Instituto ITACA de la Universidad Politécnica de Valencia.
Los servicios y soluciones que desarrollará el proyecto permitirán aumentar la calidad de vida y la independencia de las personas mayores. Esta nueva plataforma se pondrá a prueba con tres proyectos pilotos en España, Italia y Dinamarca.
Conclusiones
Las nuevas tecnologías de la Información y las Comunicaciones pueden y deben utilizarse para la promoción del bienestar de las personas, la eliminación de barreras de comunicación y como apoyo a la vida independiente y a la integración social y laboral de todos los grupos sociales teniendo en cuenta su diversidad. En cualquier caso, la tecnología es un medio y no un fin, que abre nuevas puertas a la inclusión, no sustituyendo sino complementando el apoyo humano.
Es importante destacar también la importancia de la difusión del conocimiento y la formación en el uso de las nuevas tecnologías para que sus beneficios lleguen a toda la Sociedad.
Agradecimientos
A todas las instituciones y organizaciones que colaboran en estos y otros proyectos haciendo posible que el uso de las nuevas tecnologías contribuya a la mejora del bienestar de las personas y en especial de aquellos colectivos más vulnerables.

MAT II. Materiales de aprendizaje para todos (fase II)
Fundació per la Universitat Oberta deCatalunya y Fundosa Teleservicios
Resumen
La Universitat Oberta de catalunya desea hacer accesibles sus materiales docentes, actualmente en formato Web, con el fin de que las personas con alguna discapacidad no encuentren una barrera al tratar de mejorar sus conocimientos sobre las materias que la UOC imparte, creando una herramienta tecnológica transferible para la migración de contenidos a formatos accesibles online. El objetivo final es romper las barreras que tienen actualmente las personas con alguna discapacidad de integrarse en la Sociedad de la Información y de satisfacer sus necesidades específicas de aprendizaje.
Este proyecto surge de la colaboración entre Fundosa Teleservicios y la Universitat Oberta de Catalunya para el desarrollo de un entorno de aprendizaje accesible que incluya los materiales didácticos y de la voluntad de la UOC en ser una universidad abierta y en Internet para todos, incluyendo aquellas personas con discapacidad. Se desarrolló una primera fase dentro del proyecto “MAT” (financiado en parte por el programa PROFIT con expediente FIT‐350300‐2004‐46). En la primera fase del proyecto MAT, una vez creada una Definición de Tipo de Documento (en adelante DTD) que nos sirve para poder guardar de forma estructurada un material docente generando un fichero XML y teniendo como base un material docente, hemos podido cambiar la forma de presentación, en los siguientes formatos:
• Libro Hablado
• Formato Web estándar accesible de la UOC
En esta segunda fase hemos abordado aquellos aspectos que quedaron fuera de la anterior fase. Se toma un material didáctico piloto y se trata de hacerlo accesible con la herramienta desarrollada. En un futuro se prevé ir adaptando progresivamente todo el resto del material docente. Por tanto, en esta segunda fase, el objetivo que nos hemos planteado es:
• Transformar dichos contenidos a un material integrado en el entorno de e‐learning (ALT) de Fundosa Teleservicios.
• Integrar los archivos audio generados en la fase I en materiales Web accesibles.
Por otra parte, es importante destacar, que el entorno e‐learning donde se integrará el material docente, ha sido desarrollado con criterios de accesibilidad, por lo que cualquier persona que presente un problema visual, motriz, etc., podrá acceder a los contenidos con total comodidad. También cabe destacar que la metodología obtenida en la fase I del proyecto MAT, de generación del contenedor de un material docente accesible, se ha aplicado ya a más de 1000 materiales de la UOC.
63

Introducción
Cuando un alumno con discapacidad visual afronta la tarea de realizar unos estudios a distancia lo ha de poder realizar con las mismas condiciones que los demás alumnos. Normalmente se le envía una serie de materiales en papel o soporte digital. Si sus apuntes están en soporte papel tendrá que pasarlos a un formato digital mediante OCR. Este proceso es lento y no fiable. Por otra parte el material digital que se le entrega debería de ser accesible. Por tanto, dependiendo del tipo de material de que disponga, puede ser muy complicado para el alumno discapacitado seguir los estudios como cualquier otro alumno.
Con el fin de romper esta brecha Fundosa Teleservicios y la Universitat Oberta de Catalunya se plantearon llevar a cabo un proyecto que transformará los materiales que tenía la UOC, en un formato no manipulable y no totalmente accesible (en HTML), a un formato XML accesible. El cual por medio de parseadores pudiese mostrarse en el entorno de aprendizaje que tiene Fundosa Teleservicios (el cual cumple las recomendaciones del WAI), o transformarse en el formato de Libro Hablado, formato Web accesible, etc.
Resumen de las actividades realizadas
La Universitat Oberta de Catalunya (UOC) ha ido creando una serie de materiales de estudio en formato HTML. Estos documentos son difíciles de manipular a gran escala. Por ejemplo si se desea cambiar el logotipo de todos los materiales se tendría que realizar manualmente editando cada uno de los materiales. Y dado el gran número de materiales que se han ido editando esa manipulación implica un gran coste económico.
A causa de lo anterior se planteó pasar los materiales didácticos a un formato mas manipulable como es XML, que separase los elementos comunes del contenido del curso.
En el párrafo siguiente se puede ver un fragmento del fichero XML de una asignatura de la UOC, la cual se divide en módulos los cuales tienen una serie de autores, biografía, etc.
<?xml version="1.0" encoding="iso-8859-1"?> <!--<!DOCTYPE assignatura SYSTEM "assignatura_junt.dtd">--> <assignatura> <title>Legislación financiera</title> <code> <web>UW04_90419_00004</web> <pdf>UW04/90419/00004</pdf> </code> <copy>PUOC</copy> <autor type="f"><name>Ana Mª Delgado García</name><cv><p>Doctora en Derecho, Profesora de Derecho Financiero y Tributario de la Universista Oberta de Catalunya</p></cv></autor> <autor type="m"><name>Rafael Oliver Cuello</name><cv><p>Doctor en Derecho, Profesor de Derecho Financiero y Tributario de la Universidad Pompeu Fabra</p></cv></autor> <autor type="f"><name>Ana Sala Andrés</name><cv><p>Doctora en Derecho, Profesora de Derecho Mercantil de la Universitat Oberta de Catalunya</p></cv></autor>
64

Una vez conseguido un XML y un DTD que valida este material comienza propiamente el proyecto MAT en su segunda fase. En dicho proyecto se pretende transformar estos materiales a las siguientes presentaciones:
Material Web accesible con el audio integrado.
Transformar dichos contenidos a un material integrado en el entorno de e‐learning (ALT) de Fundosa Teleservicios.
Integración audio en curso web
Mediante un XSL se va leyendo el fichero XML y se genera el material que se muestra en la figura 1. En el cual por medio de un manifest se generan los menús para movernos por el material. Podemos observar un enlace llamado “audio” que nos permite oír la página actual.
Figura 1.
La generación de esta nueva versión del curso en formato web accesible se realiza en los pasos siguientes:
• Un XSL lee el fichero XML y extrae el texto que se desea pasar a audio.
• En el paso anterior se ha generado un fichero de texto plano que es leído por una aplicación java. La cual lo va troceando y generando una versión audio del curso.
65

• Por otra parte, Un XSL lee el fichero XML y genera la parte del contenido del curso. Se genera un fichero llamado Manifest que da información sobre la estructura del curso.
• En un segundo paso un XSL lee el fichero manifest anteriormente generado creando el menú de navegación y todos los elementos comunes del material docente.
Generación fichero texto plano
En MAT se había generado una serie de ficheros XSL que transformaban un curso en formato XML a la presentación web de un material docente. En esta segunda fase se trataba de conseguir un XSL que transformase el curso docente en una serie de documentos audio.
Por esta razón, se generaron una serie de nuevos XSL que iban recorriendo el fichero XML y añadían el texto que se desea convertir a voz en un fichero de texto con unas marcas. Este fichero contiene todo el texto del material simulando la maquetación que tendría el correspondiente texto html (títulos, párrafos, listas, etc.). Las marcas le indican a un programa donde comenzará y finalizará el audio a generar, tal como se verá en el apartado siguiente.
Troceado del fichero texto plano
Por ejemplo en el apartado anterior podríamos haber obtenido un fragmento de fichero como el siguiente:
******** NEW FILE ********* webtext/nwin/guia/curri_N10014.txt Violencia de género: perspectiva jurídica y criminológica Isabel García Noguera ******** END FILE *********
En el fragmento anterior se puede ver que la primera línea es una marca que le indica a un programa especial que a partir de este punto se inicia un nuevo documento de texto. La segunda línea le indica la ruta donde va almacenado el archivo. A continuación encontramos el texto generado y la última línea le indica que ha finalizado el documento.
Un programa java lee el fichero anterior y va generando un árbol de directorios con una serie de documentos de texto según las marcas que va encontrando.
Generación fichero audio
El tercer paso consiste en generar un fichero WAV o MP3 para cada uno de los ficheros de texto generados en la etapa anterior. Esto se realiza mediante un programa Java que ejecuta un programa externo. El cual hace de puente entre este java y el motor de voz usado para la conversión. La ventaja de usar un programa puente es que nos posibilitaría usar distintos sintetizadores de voz cambiando solo dicho programa.
La función java sería la siguiente (ver anexo 1):
public static String transformarTTS(String ruta)
66

En el método anterior primero se comprueba que hay ficheros a generar. Para cada uno de los ficheros se define el nombre del archivo WAV y MP3 a crear. Luego se llama a una aplicación externa que convierte el fichero de texto a formato WAV. Dado que este fichero generado ocupa mucho espacio, a continuación, se llama otra aplicación externa que convierte el WAV a formato MP3.
El programa externo que convierte de texto a voz tiene la siguiente forma de ser invocado:
\Daisy\loquendo.exe texto audio_wav lector 16000 l
El primer parámetro es el nombre del fichero de texto, el segundo el nombre del archivo de audio a producir. El siguiente parámetro es el nombre del lector (Jordi, Jorge, Carmen, etc.). El cuarto parámetro corresponde a la frecuencia de mostreo. Y el último puede ser “U” o “L” dependiendo del motor usado.
Para la conversión de WAV a MP3 se usa una aplicación de código libre llamado LAME cuya forma de invocación es:
Lame.exe –h fichero_WAV Fichero_MP3
Si no ha habido ningún error al final de este proceso tendremos un árbol de directorios con una serie de ficheros MP3 que corresponden al curso web en formato audio.
Estos ficheros MP3 han de poderse oír cuando el estudiante esté visualizando el curso web. Por lo que se tuvieron que modificar los XSL generados en MAT para añadir el enlace al fichero de audio en las distintas paginas HTML que componen un curso docente.
Todos estos pasos se ejecutan vía un script (fichero bat de MS‐DOS) que va llamando secuencialmente los distintos procesos a ejecutar.
Integración en el entorno ALT
Se trata de integrar cursos que cumplen con la normativa SCORM dentro de la plataforma E‐Learning ALT (Accesible Learning Tool).
Para cumplir con este objetivo, partimos de un fichero comprimido ZIP, que representa los contenidos de un curso compatible con SCORM 1.2. Desde ALT, se dispone de una interfaz que nos permite seleccionar el fichero ZIP para que éste sea integrado como un curso más dentro de la plataforma ALT, dándole las mismas prestaciones que los cursos que son creados dentro desde ALT.
A continuación iremos detallando los pasos a seguir desde que disponemos de un curso SCORM (fichero ZIP) hasta que es integrado y accedido desde ALT.
Tareas para dar de alta un curso SCORM
A) Importación de fichero ZIP (Curso SCORM) en ALT
1. Entramos en la plataforma ALT con perfil Administrador o Super‐Administrador. La diferencia entre uno y otro es que el primero pertenece a un cliente determinado, y
67

sólo puede administrar cursos del cliente al que pertenece. El Super‐Administrador puede administrar cursos de todos los clientes.
2. Una vez dentro de la plataforma ALT, pulsamos el enlace “Cursos” (menú superior). Después, pulsamos el enlace “Importar cursos SCORM” (menú lateral izquierdo). Aparece el siguiente formulario:
Figura 2.
• Título Curso: título que queremos darle al curso. El título que le demos en este campo es el que aparecerá en todas las paginas como información.
• Seleccione Curso SCORM: aquí seleccionamos el fichero ZIP que representa el curso SCORM.
• Fecha Matriculación: fecha de matriculación del curso. Representa la fecha a partir de la cual, pueden matricularse alumnos a este curso.
3. Si pulsamos “Borrar” se limpia los contenidos del formulario. Si pulsamos Aceptar, realiza las siguientes validaciones:
• Título Curso es obligatorio
• Seleccione Curso SCORM es obligatorio. Sin embargo, NO COMPRUEBA QUE EL FICHERO ZIP SEA REALMENTE UN CURSO SCORM. Es responsabilidad del usuario que el ZIP seleccionado sea un curso SCORM. Aún así, si por error seleccionase un fichero ZIP que no es un curso SCORM, puede existir la posibilidad de darlo de baja desde otra parte de la aplicación que se explicará más adelante.
• Cliente este campo sólo aparece para el perfil Super‐Administrador. En perfil Administrador, el cliente es el cliente del Administrador.
68

• Fecha matriculación es obligatorio y debe introducirse en formato DD/MM/YYYY.
• El título del Curso NO DEBE EXISTIR. Es decir, si ya existe otro curso con el mismo título, no deja insertar el curso.
4. Una vez superada la fase de validación del formulario, ya tenemos el curso SCORM dentro de la plataforma ALT.
B) Modificar características Curso SCORM
Una vez que ya hemos dado de alta al curso SCORM, podemos ver las características del mismo pulsando sobre el enlace “Modificación” (panel lateral izquierdo). Saldrá un listado de todos los cursos disponibles en ALT, tanto los propios de ALT como de los importados tipo SCORM. No existe distinción entre ellos a la hora de trabajar con ellos.
En esta página podemos modificar el título del curso, el idioma y la fecha de matriculación.
C) Dar de baja un Curso SCORM
Para dar de baja un curso SCORM, se realiza el mismo tratamiento que los cursos de ALT: pulsamos sobre el enlace “Baja Curso”, y sale un listado de los cursos dados de alta. Pulsamos sobre el botón “Dar de baja” del curso que deseemos dar de baja y el curso dejará de estar operativo, pero NO SE BORRA FÍSICAMENTE.
Los cursos dados de baja, siempre pueden recuperarse o ser dados de alta nuevamente mediante el enlace “Alta curso borrado
Tareas para acceder a un curso ALT
Una vez importado el Curso SCORM a ALT, procedemos a matricular a un alumno para que éste pueda acceder y hacer uso del curso SCORM.
Acceso de un alumno a un curso SCORM:
Entramos en ALT con las credenciales de un alumno, obteniendo la siguiente página de bienvenida (ver figura 3):
69

Figura 3.
En esta página, los dos primeros cursos, son cursos formato ALT, y el resto, son cursos SCORM.
Si pulsamos en cualquiera de los cursos SCORM, aparece la siguiente pantalla (ver figura 4):
Figura 4.
Esta página presenta información de bienvenida con el título del curso:
70

• El menú lateral izquierdo representa el menú de primer nivel de navegación del curso.
• El menú superior representa las herramientas comunes de control y seguimiento del curso.
Si pulsamos del menú, por ejemplo, el elemento “Introducción”, obtenemos la siguiente página (ver figura 5):
Figura 5.
Se presenta la información relativa al apartado introducción.
Para los capítulos que contengan a su vez subcapítulos, la información se presenta de la siguiente manera (ver figura 6):
71

Figura 6.
El menú lateral izquierdo presenta los capítulos principales del curso, y en el menú superior, los subcapítulos del elemento seleccionado del menú lateral izquierdo.
Además, podemos hacer uso de las herramientas comunes del menú superior: programa, tablón, agenda, etc. todas las actividades que se realicen, irán asociadas a este curso.
Beneficios generados por el proyecto
La enseñanza virtual o e‐learning está sufriendo un proceso de expansión constante, que seguirá adelante en los próximos años, según las estimaciones realizadas por las grandes consultoras. La enseñanza virtual se perfila como solución a los problemas a los que la enseñanza tradicional no puede dar respuesta. El problema lo encontramos en que los materiales docentes han de ser modificados para que algunos alumnos no se encuentren con otra barrera. Para una persona con discapacidad visual tener un material adaptado a su discapacidad es esencial para poder mejorar en su vida intelectual.
El trabajo que hemos presentado en este documento innova en los problemas de accesibilidad del día a día del estudiante discapacitado. Si miramos en el mercado educativo no encontramos referencias sobre herramientas para la generación de cursos totalmente accesibles. Si observamos las diferentes Universidades a distancia, la mayoría de documentación esta suministrada en soporte papel. Y tal como hemos explicado anteriormente este formato provoca muchos problemas a las personas con discapacidad visual. Si observamos la enseñanza presencial tampoco existen materiales adaptados para personas con problemas visuales.
72

Dado que disponer de un material adaptado a todos los tipos de usuarios es esencial, también es muy interesante disponer de una serie de herramientas que a partir de un contenido didáctico en un formato manipulable pueda ser transformado a la presentación más idónea para dicho usuario. Con nuestro producto podemos generar actualmente el Libro Hablado y la versión html accesible con el audio integrado. Pero en futuras versiones podría generarse el formato PDF, texto braille, etc. Y para ello solo se requiere del diseño de nuevos parseadores, ya que el XML que hemos presentado en este documento es lo suficiente versátil para adaptarse a muchas transformaciones.
Con nuestro producto final el alumno puede estudiar desde casa conectándose a Internet usando su ordenador adaptado a sus necesidades. Para ello se han diseñado una serie de transformadores que permiten importar el fichero XML al entorno de e‐learning accesible (ALT).
La mayoría de personas que optan por una enseñanza a distancia lo hacen motivados por la falta de tiempo para asistir a unas clases presenciales ya sea por carga familiar o porque trabajan. Una cosa común de estas personas es la falta de tiempo libre para dedicarlo al estudio. Si la persona no tiene una deficiencia visual puede coger sus apuntes e ir estudiando por ejemplo en el metro, bus o tren mientras va a su puesto de trabajo. Una persona con una deficiencia visual no puede llevarse su ordenador a cuestas, por lo que disponer del material en formato Libro Hablado le puede servir para ir estudiando en esos tiempos, ya que el Libro Hablado se reproduce en un lector de CD portátil (discman). Pero también pueden ser útil los audios generados a los demás estudiantes. Por esa razón se han integrado en el curso web. Y un estudiante en todo momento puede optar por leer el curso u oirlo.
Nuestra solución de material docente aporta la capacidad de hacer accesible cualquier material, sea de la UOC o de otra fuente, si se aplican las normas marcadas en la definición de tipo de documento. Y el material en este formato será automáticamente portable a los modos de presentación siguientes:
• Libro Hablado: que permite al usuario estudiar de forma desconectada de la red.
• Formato accesible: Tenemos un método de presentación del material independiente de la plataforma. Optimizada para todos los usuarios. Puede leerse o escucharse.
• Presentación en línea en el entorno ALT.
Conclusiones
La tendencia actual en relación al eLearning y las plataformas contenedoras de cursos formativos la marcan la estructuración de dichos cursos según las metodologías existentes. De esta forma se facilita:
• La migración de cursos entre plataformas.
• Independencia de los contenidos respecto de las plataformas que los contendrán.
• Los proveedores de contenidos se preocuparán exclusivamente de los contenidos y no de la tecnología relativa a la plataforma en cuestión que finalmente los soporte.
73

74
• Los proveedores tecnológicos se preocuparán exclusivamente de sus herramientas y no de los contenidos.
En este proyecto este tema se ha enfocado definiendo una estructura de curso, aportando como ejemplo un curso piloto de demostración.
Sin embargo este trabajo tal como se define hasta ahora no tendría nada de novedoso ya que actualmente son muchas las entidades relacionadas con la formación online que se encuentran en este mismo proceso. El elemento diferenciador y novedoso de este trabajo lo aporta la introducción de un requisito que debe cumplir dicha definición de estructura y por ende los cursos con ella definidos. Ese requisito no es otro que la accesibilidad de dichos cursos para personas con discapacidad o lo que es lo mismo la construcción de cursos con criterios de diseño para todos. El diseño para todos o la accesibilidad son términos que requieren de un respaldo objetivo ya que de lo contrario se caería en la subjetividad y por tanto en la pérdida de valor real, por ello el trabajo se ha apoyado en las pautas de accesibilidad definidas por el W3C/WAI con un nivel de exigencia de doble‐A.
El modelo de cursos que adoptará la UOC a partir de este proyecto será accesible en cuanto a su estructura y en cuanto a su presentación en la web, lo cual permitirá a una persona discapacitada con un navegador de Internet formarse de forma online sin barreras tecnológicas. Avanzando un paso más y partiendo de las potencialidades de disponer de los cursos en formatos XML, se decidió disponer de los cursos no solo accesibles desde un navegador web sino también desde reproductores de sonido. Para ello se construyó una herramienta que automáticamente generase un Libro Hablado a partir de un curso XML.
Con el trabajo desarrollado hasta el momento se han puesto las bases para poder generar toda una serie de herramientas que ayudarán a que la formación online resuelva los obstáculos propios de disciplinas emergentes pero con limitada experiencia en la cual apoyarse. Así mismo se ha tratado un problema detectado en gran número de plataformas de e‐Learning como es la exclusión de personas con discapacidad, sector de la población para los cuales la formación online es especialmente interesante. Por lo que los cursos podrán mostrarse en un entorno diseñado con criterios de accesibilidad como es ALT.

Aproximación a las necesidades de las TIC de las personas ciegas o con discapacidad visual. Integración mediante la
innovación
José Manuel AzorínAlbiñana Marketing Particulares, Mayores
y Necesidades Especiales de Vodafone
Nuestra responsabilidad ante la sociedad en general, nuestro entorno y el mundo que nos rodea debe dar muestras siempre, de una especial sensibilidad ante los grupos más vulnerables, a los que la nueva Sociedad de la Información es capaz de proveer de “capacidades” completas para disfrutar de una total integración laboral y, lo que es mucho más importante y a veces olvidado la integración social.
Tras la firma en el año 2004 del Acuerdo de Colaboración entre ONCE‐CIDAT y Vodafone, somos aún más conscientes de la aportación de valor en el proceso de incorporar a las personas ciegas o con deficiencia visuales al uso de la Telefonía móvil y las comunicaciones.
Dentro de este contexto vemos con gran interés nuestra contribución en la comercialización de aplicaciones para ayudar a las personas de este colectivo a tener una vida más plena a través de los servicios que proveemos y a través de la relación que mantenemos con la ONCE.
El colectivo de personas ciegas o con discapacidad visual es el siguiente:
• En la UE 6 millones son ciegos o con discapacidad visual.
• En España existen 825.000 deficientes visuales de los que el 33% están considerados discapacitados.
• De estos 685.000 (83%), son mayores de 65 años.
La Tecnología Móvil y las Personas ciegas o con discapacidad visual
Aunque el uso de teléfonos móviles convencionales plantea a las personas ciegas o con discapacidad visual serios problemas de accesibilidad, hasta hace relativamente poco tiempo no existían teléfonos móviles Accesibles. La baja resolución de la pantalla, la iluminación y el tamaño de los terminales dificultan la visión y la lectura de los menús. Las teclas no resultan fáciles de identificar aunque la marca (.) de la tecla del número 5 es un significativo avance en la orientación del teclado. Sin embargo, las personas mayores, ciegas o con deficiencia visual, tienen muchas dificultades para identificar las teclas, cuando no están separadas y con el suficiente relieve. En la actualidad han aparecido iniciativas que intentan paliar este problema.
75

Hasta hace poco más de Tres años no existían teléfonos móviles adaptados para personas ciegas o con discapacidad visual, sin embargo en la actualidad han aparecido iniciativas muy interesantes.
Por otra parte se han desarrollado aplicaciones que se pueden instalar en teléfonos que utilicen el sistema operativo Simbyan. Actuando como un PDA, posibilitan funciones limitadas que están programadas y permiten conectar con otros dispositivos abriendo el paso a la domótica.
Vodafone en el Reino Unido con el lanzamiento de una aplicación parlante (TALK) en el año 2002 y en particular en España donde juntos (ONCE y Vodafone) hemos lanzado 2 aplicaciones parlantes, desarrolladas por Code Factory que consisten en aplicaciones de software que con la ayuda de un sintetizador de voz permite utilizar las funciones de un menú simplificado.
Mobile Accesibility 2 permite a la persona ciega aprovechar todas las posibilidades de uso que proporciona el teléfono y cuyas funcionalidades más importantes son:
1. Gestión completa de las llamadas. Se puede tener control de las llamadas entrantes, salientes, llamadas perdidas …
2. Gestión de contactos en la que se dispone de un registro completo de datos de los contactos, varios números de teléfono, direcciones, notas.
3. Posibilidad de gestión de SMS, tanto a nivel de redacción y envío de los mismos como en su recepción y lectura.
4. Gestión de MMS.
5. Posibilidad de identificar el número de llamante antes de descolgar la llamada.
6. Gestión de perfiles para adecuar el tono de llamadas a distintos entornos de utilización.
7. Control del volumen del tono de llamada.
8. Posibilidad de alarma.
9. Gestión de contraste de la pantalla.Mobile Speak de mayores prestaciones como MP3, identificadores de colores, etc.
Por último existen aplicaciones móviles que llevan incorporados revisores de pantalla (Mobile Magnifier). Todas estas aplicaciones móviles se comercializan en España.
Por otro lado, la empresa española Owasys ha diseñado específicamente para ciegos y personas con deficiencia visual un teléfono que utilizando la tecnología de Babel, sustituye la pantalla por un sintetizador que lee todo lo debería aparecer en la supuesta pantalla. El sistema habla al usuario y le informa de quién le llama, qué mensajes ha recibido etc. Es un teléfono no convencional y de diseño específico para personas ciegas.
76

La elección de teléfono móvil es una decisión que depende de cada usuario. Cada uno de los tipos de móviles explicados tienen su utilidad y sus ventajas en función de las características de cada usuarios.
Cuales son algunas de las importantes características que debe tener un teléfono móvil para que lo use una persona ciega o con discapacidad visual :
1. Display de mayor tamaño, configurable en contraste, y tamaño de letras y números. Programa parlante revisor de pantalla que permita el acceso a las funciones del móvil.
2. Sencillez para el manejo de los menús, sintetizadores de voz que lean lo que aparece en la pantalla del móvil en relación a funciones y menús.
3. Teclas bien separadas y que se perciban al tacto
4. Funciones de fácil manejo y con mayor accesibilidad a través de síntesis de voz y teclado con botones bien diferenciados y resaltados, con posibilidad de definir los colores y tamaños del texto y fondos para personas con deficiencia visual funcional.
5. Implementación de sonidos diferentes según el botón o función que sea activa
6. Pantallas accesibles con macrotipos.
USO DE LAS TECNOLOGÍAS POR EL COLECTIVO DE PERSONAS CON DISCAPACIDAD (PCD).
La telefonía móvil ha supuesto, debido a su portabilidad y disponibilidad, un incremento importantísimo de la autonomía del colectivo de discapacitados físicos, facilitando en multitud de ocasiones prescindir de ayuda de terceras personas. Pero su reducido tamaño, tendencia cada vez mayor y las reducidas dimensiones de teclas, botones o pantalla, puede representar un obstáculo para las personas más afectadas.
Respecto al uso de otras tecnologías, Las personas con discapacidad visual, las personas sordas y las personas con discapacidad intelectual utilizan menos el ordenador que el teléfono móvil [Fundación Auna, 2004].
Para los mayores y aún más para los que presentan alguna discapacidad, el móvil representa una herramienta de comunicación social, así como un dispositivo de seguridad.
El teléfono móvil se ha incorporado a la vida de las personas con discapacidad (figura 1 y 2 ). En general, el nivel de uso es “frecuente” o “muy frecuente”. Destaca el alto porcentaje que los representantes de las personas sordas han concedido al “uso frecuente”. Por otra parte, es comprensible que el mayor porcentaje de “uso poco frecuente” corresponda al colectivo de las personas con discapacidad intelectual.
77

Fuente: Fundación AUNA, e‐España 2004.
Gráfica 1.
En general, el colectivo de PCD comparte la idea de que las TIC son herramientas básicas de integración laboral de su colectivo (figura 3). El 88% de las personas con discapacidad visual y el 89% de las personas con discapacidad física que trabajan, utilizan las TIC en el desarrollo de sus tareas laborales.
Estos porcentajes bajan bastante en los colectivos de personas con discapacidad psíquica (65%) y las personas sordas (55%), debido a la menor incorporación a la vida laboral por parte de estos dos últimos colectivos [Fundación Auna, 2004].
Fuente: Fundación AUNA, e‐España 2004.
Gráfica 2.
78

Los robots paralelos en la rehabilitación médica
José R. Serracín P., Roque Saltaren y Rafael Aracil Universidad Politécnica de Madrid
Resumen
Este Trabajo presenta una introducción de lo que son los robots de estructura paralela, contiene además una breve guía para la concepción y desarrollo de robots paralelos, seguidamente presenta un enfoque de la aplicación de éstos, en actividades de rehabilitación física de personas que sufren algún tipo de discapacidad, que puede ser atenuada o corregida con la ayuda de robots paralelos.
INTRODUCCIÓN
Un robot paralelo es una estructura mecánica formada por cadenas cinemáticas cerradas, en el que el efector final se une a la base por al menos dos cadenas cinemáticas independientes. En los robots paralelos cada una de las cadenas cinemáticas dispone en general de un único accionamiento de potencia, reduciendo así su complejidad, pues el accionamiento también es la estructura mecánica. Cada cadena cinemática servo actuada paralela, permite canalizar mejor la energía de los accionadores hacia la mejora de las prestaciones del robot, en cuanto a la velocidad del movimiento, la rigidez y la capacidad de carga de su efector final. Una nueva generación de aparatos robóticas podría un día permitir que miles de pacientes que han sufrido apoplejías, accidentes, enfermedades, etc., se recuperen rápidamente, ayudándoles a recuperar la habilidad de movimientos normalmente. La protésica y ortésica, con sus mejores diseños y unido al uso de nuevos materiales y ayuda de la robótica, facilitan que los pacientes realicen actividades como la marcha cada vez de manera más funcional y fisiológica. La robótica, aplicada intensamente en el mundo industrial, ayuda ya a personas con discapacidad, permitiendo y facilitando su interacción con el medio ambiente. La figura‐1 muestra un robot paralelo “Sistema basado en Plataforma Stewart para rehabilitación de tobillo”, M. Girone, 2001 [8]. El movimiento del robot paralelo se consigue variando la longitud de los accionadores lineales, a través de un sistema de control inteligente que combina la realidad virtual, la interacción háptica (percepción de fuerzas del medio) y la computación grafica de precisión basada en un escáner 3D.
79

Figura 1. Robot paralelo (plataforma Stewart) para aplicaciones de rehabilitación de tobillo
GENERALIDADES
Prestaciones de los robots paralelos. R. Aracil 2006 [10] Es indiscutible la primacía en expansión de los robots con estructura serie. Los robots paralelos, en constante crecimiento en la actualidad, son utilizados especialmente en determinadas aplicaciones en las que sus características ofrecen ventajas para resolver algunos problemas para los que tienen limitaciones los robots serie.
En general, las plataformas paralelas presentan las siguientes ventajas":
Los accionamientos de potencia conectan directamente la base del robot al efector final. Debido a esto, los accionamientos de potencia sirven de elementos estructurales y actúan de manera simultánea, lo que les da la capacidad de manipular cargas muy superiores a su propio peso. Por tanto, el elevado ratio carga/potencia de estos mecanismos proporciona una alta eficiencia energética.
Las estructuras paralelas son mecanismos que ofrecen una alta rigidez y muy bajo peso. Esto hace que presenten unas características en cuanto a precisión claramente superiores a las de los robots serie.
Presentan elevadas velocidades de operación, en comparación con cualquier otro tipo de estructura robótica.
Sin embargo, también presentan otras características que, según para que aplicación, pueden considerarse “desventajas”:
La cinemática de los mecanismos paralelos es más complicada. En ocasiones esto obliga a recurrir a sensores redundantes para poder establecer un lazo de control.
80

El espacio de trabajo suele ser pequeño comparativamente hablando. Además, no es sencillo su cálculo, pues la posición y orientación están muy fuertemente acopladas.
El problema de las configuraciones singulares es más complejo, y debe resolverse específicamente para cada topología.
No existe, como ocurre en los robots serie, un modelo dinámico general para los mismos. Esto dificulta el desarrollo de algoritmos de control de carácter general y hace que los robots existentes en la actualidad se controlen de forma desacoplada.
Configuraciones estructurales de los robots paralelos. Existen innumerables configuraciones estructurales para los robots paralelos. Las combinaciones de numero de cadenas cinemáticas, tipo de las mismas, restricciones en el movimiento de las articulaciones, etc. Hacen prácticamente imposible una presentación sistemática de las estructuras de los robots paralelos.
Merlet Merlet, 1997 [7] ha sido uno de los autores que más profundamente ha estudiado estas configuraciones. En principio, y según el tipo de movimientos que son capaces de realizar se pueden distinguir dos grupos, los robots planares y los espaciales.
Los mecanismos planares son aquellos en los que su movimiento se reduce al plano. Por tanto pueden tener 2 ó 3 grados de libertad, correspondientes al movimiento de traslación en el plano y a una rotación sobre un eje perpendicular al mismo (Figura 2).
Figura 2. Ejemplos de robots planares de 2 y 3 gdl.
Los robots espaciales son aquellos que evolucionan en todo el espacio tridimensional (Figura 3).Algunos de ellos disponen de los tres grados de traslación, otros tan solo son capaces de orientarse. En la figura 3 se muestran algunas estructuras de robots de 3, 4, 5 y 6 grados de libertad, aunque existen algunas que solo tiene dos, el de la izquierda es manipulador neumático paralelo utilizado para la rehabilitación de la muñeca. En todos estos esquemas las uniones de los accionamientos con el efector final y la base se realizan con juntas universales (U) o esféricas (S) que tienen respectivamente dos y tres grados de libertad.
Dos ejemplos de robots de estructura paralela aplicados a la rehabilitación física (Figuras 4 y 5) A. Gupta 2004 [1], en la figura 4 se muestra un robot paralelo que es utilizado para rehabilitaciones de brazo y muñeca y en la figura 5 un robot paralelo para la rehabilitación del tobillo.
81

Figura 3. Ejemplos de robots espaciales.
Figura 4. Robot Paralelo para brazo y muñeca.
Figura 5. Robot Paralelo para brazo.
METODOLOGÍA PROPUESTA PARA LA CONCEPCIÓN Y DESARROLLO DE ROBOTS PARALELOS
La siguiente metodología para la concepción de robots paralelos R. Saltarén 2006 [12].
82

1. Definición de la morfología del robot. La morfología del robot depende de la tarea que debe realizar. Sin duda una referencia necesaria acerca de las morfologías de los robots paralelos y sus aplicaciones se puede encontrar en la página Web de Merlet, (http://www‐sop.inria.fr/coprin/equipe/merlet/merlet.html) y en www.parallemic.org . Este es el paso inicial más importante, después de definir la morfología que más nos conviene para la aplicación, se debe verificar el número de grados de libertad del mecanismo aplicando la formula de Grübler.
2. Modelado cinemático del robot. Para realizar el modelado cinemático, es conocido que el método de Denavit‐Hartemberg utilizado en los robots seriales, no es la mejor opción. El modelo cinemático inverso se debe desarrollar con los conceptos básicos de las matrices de transformación homogénea calculadas en base a las técnicas de los screws sucesivos Tsai [14]. Es muy importante utilizar la formula de Rodríguez (y/o los cuaterniones) junto con las técnicas de screws sucesivos para evitar las singularidades de las matrices de rotación, en este sentido se debe evitar modelar las rotaciones utilizando el teorema de las tres rotaciones de Euler. En el caso de la cinemática directa, esta se debe calcular a menudo utilizando métodos numéricos. El modelado de la cadena cinemática a través de los vectores de restricciones Haug [5] y su solución numérica utilizando la técnica de Newton‐Raphson es una de las mejores opciones.
3. Modelado diferencial del robot. El modelado diferencial del robot basado en la determinación y análisis del jacobiano directo e inverso es clave para el control de trayectorias del robot. El determinante del jacobiano y el índice de de condición CI (Condition Index) [9], [11] son parte esencial del algoritmo de decisión del planificador de trayectorias y del control cinemático. El índice CI que varía entre 0 y 1, permite calcular que tan cerca está el robot de una singularidad y en base a él, como adoptar soluciones optimas de control de trayectorias para que el robot sea controlable. Entre más próximo a cero este el índice CI, el robot esta cerca de una configuración singular. Es conocido que los robots paralelos ganan grados de libertad en ciertas configuraciones singulares, estos grados de libertad sin control pueden causar un gran desastre. El modelado diferencial de robot permite además calcular el índice global de desempeño GCI [9], [11]. Este índice global es muy importante a la hora de calificar si el diseño cinemático de un robot es bueno o deficiente. El índice de comportamiento global varía entre 0 y 1 y refleja que porcentaje del espacio de trabajo teórico es aprovechado por el robot sin que este entre en una singularidad.
4. Modelado dinámico. El modelado dinámico de un robot paralelo usualmente se realiza utilizando técnicas de dinámica computacional [9]. Para los efectos de diseño, una buena opción es modelar el robot utilizando un paquete de simulación dinámica como ADAMS o DADS. Estos paquetes permiten realizar programas en s entorno de programación para reducir los tiempos de desarrollo. El modelado dinámico es importante de una parte para el cálculo de los accionamientos de potencia y de otra parte para el control, en el caso que se quiera usar técnicas de par calculado Kelly [6]. Disponer de un buen modelo dinámico sin duda permite optimizar el estudio y análisis de la dinámica de un robot paralelo y su optimización y control.
83

5. Diseño mecánico. El diseño mecánico de los robots paralelos a menudo se ve sujeto a las limitaciones en la consecución de las articulaciones esféricas y universales lo suficientemente precisas para alcanzar resoluciones del orden de micras en el efector final. En el caso de las juntas esféricas, en la siguiente dirección se pueden encontrar juntas especiales para robots paralelos, http://www.hephaist.co.jp/e/index.html. En el caso de los accionamientos lineales, es usual llegar a la conclusión de que estos accionamientos sean eléctricos. En este sentido un accionamiento lineal eléctrico está formado por un husillo a bolas o de rodillos recirculantes y un servomotor brushless, La firma SKF: http://www.linearmotion.skf.com, es una buena opción para adquirir los husillos a bolas o de rodillos recirculantes o el accionamiento lineal completo. En robots de precisión la mejor opción es utilizar husillos de rodillos recirculantes por ser más precisos. En el caso de requerir desarrollar microrobots paralelos, la firma Steinmeyer (http://www.stein‐meyer.com/english/index.htm), ofrece micro husillos a bolas de 3 mm. de diámetro.
6. Materiales de ingeniería y técnicas de fabricación. A menudo es preferible abordar una primera fase del desarrollo de un nuevo robot paralelo construyendo un prototipo. Este prototipo no tiene por que construirse a escala real. Realizar un prototipo a escala, reduce costos y es igualmente útil para los desarrollos de los algoritmos computacionales de control cinemático, de control dinámico y del desarrollo de las interfaces de usuario. Al desarrollar los prototipos es muy posible que los plásticos de ingeniería sean la mejor opción. En este sentido, materiales como ARNITE, DELRIN o el Polietileno de alta densidad ofrecen excelentes propiedades estructurales mecánicas y muy reducidos niveles de absorción de humedad., además de que su mecanizado es menos costoso (http://www.plasticos‐mecanizables.com/). Estos materiales junto con el Aluminio, son fáciles de mecanizar con técnicas de corte por agua y/o láser, lo que reduce sustancialmente los costos de desarrollo.
7. Integración y desarrollo del hardware y de control. Una opción económica es dotar al robot de un control abordo basado en una tarjeta PC‐104 o similar, con salidas de control en una red multipunto RS 485 o a través de bus CAN y con comunicaciones inalámbricas. En el caso de prestaciones mas exigentes la firma GALIL, ofrece tarjetas multiejes de costes favorables (www.galilmc.com).
8. Interfaz de usuario y entorno de desarrollo. Sin duda una decisión clave para la concepción y desarrollo de un robot paralelo es bajo que sistema operativo se deben realizar los desarrollos. Una opción bastante buena es hacer los desarrollos bajo el sistema operativo de tiempo real QNX, que esta basado en la tecnología de Hilos y es especialmente apto para los desarrollos de sistemas empotrados, como es el caso de la tarjeta PC‐104. Una opción más general aunque también dependiente de una oferta comercial, es trabajar bajo el entorno de RTLinux‐Pro de la firma FSMLabs. En este caso al seguir el estándar POSIX, hace posible la portabilidad de los desarrollos. No obstante se conoce que no existe un estandard Linux para tiempo real, y se dispone de algunas versiones libres como RTAI y RTLinux, al trabajar con ellas debe tenerse en cuenta los tiempos de instalación y de los servo ciclos que se consigan. La interfaz de usuario es cada vez mas importante, su desarrollo es complejo y es muy posible que tengamos
84

que recurrir a técnicas de ingeniería de software UML, una opción en este caso puede ser utilizar herramientas CASE como las provistas por ARTiSAN.
APLICACIÓN EN LA REHABILITACIÓN MÉDICA
La rehabilitación es el conjunto de procedimientos médicos, psicológicos, sociales, dirigidos a ayudar a una persona a alcanzar el más completo potencial físico, psicológico, social, laboral y educacional compatible con su deficiencia fisiológica o anatómica y limitaciones medioambientales, intentando restablecer o restaurar la salud. La rehabilitación debe actuar tanto en la causa de la discapacidad como en los efectos producidos por la enfermedad, basado en el modelo biopsicosocial, para aumentar la función perdida y así la calidad de vida. La rehabilitación médica interviene sobre los tres aspectos de la enfermedad que son:
• La deficiencia, es decir el conjunto de secuelas patológicas o físicas de un órgano o aparato producidas por la enfermedad, como la pérdida de una extremidad o el déficit sensorial.
• La discapacidad, que es la restricción o ausencia de función, secundario a la deficiencia, de la habilidad de una persona para realizar una tarea o actividad dentro de un rango considerado humanamente normal, como trastorno de la marcha, o dificultad para vestirse.
• La pérdida de roles en relación a la discapacidad, como por ejemplo la pérdida de la actividad laboral o pérdida del puesto de trabajo.
El objetivo de los programas de rehabilitación es obtener el máximo nivel de independencia de sus pacientes, tomando en cuenta sus capacidades y aspiraciones de vida.
En España, la especialidad médica que coordina el proceso rehabilitador es la de medicina física y rehabilitación. Y decimos coordinar, porque precisamente por su concepción, la rehabilitación médica de un individuo es por necesidad multidisciplinar, y en ella deben intervenir de manera autónoma y desde su especificidad el fisioterapeuta, el psicólogo, el terapeuta ocupacional, el logopeda, el trabajador social, así como intervenciones puntuales de otros especialistas médicos si así fuera necesario.
C. Paolinelli 2003 [4] Es un imperativo ético que la especialidad de la medicina física y rehabilitación sea cada vez menos empírica y más científica. Eso no significa como algunos piensan una deshumanización del que hacer de la rehabilitación médica sino darle un marco conceptual más sólido. El desarrollo de estándares de calidad y guías clínicas de tratamiento basados en estos principios harán que el trabajo sea reconocido ampliamente, y económicamente sustentable. El advenimiento de nuevas tecnologías ha sido una verdadera revolución copernicana en el campo de la Rehabilitación Médica, permitiendo una mayor integración de las personas con discapacidad. Sistemas de ayudas físicas, sistemas alternativos y aumentativos de comunicación, equipamiento que facilita la movilidad y mejoría en el control de entornos, son algunos ejemplos de ello. Así la tecnología se pone al servicio de los hombres, facilitando a los que tienen una discapacidad (limitaciones de la actividad), el logro de una mejor funcionalidad.
85

Los robots para la rehabilitación son aquellos destinados a recuperar una función (figura 6) o capacidad de la persona. Son precisos, potentes y obedientes, y pueden ejecutar muchas de las tareas repetitivas que hasta ahora han tenido que hacer los fisioterapeutas. Con la llegada de robots sumamente fiables, fabricados en serie, la perspectiva de la fisioterapia de neuro rehabilitación con la ayuda de robots ha pasado ha ser realidad.
Figura 6. Ejemplos de robots paralelos aplicados a la rehabilitación.
El análisis biomecánico del movimiento, mediante estudios electrocinesiológicos, capturas de imágenes en video y plataformas dinamométricas, permiten el análisis de la marcha y la postura y su posterior corrección.
R.F. Boian [13] El tobillo de Rutgers (figura 7), es un tipo compacto y robusto de la plataforma Stewart, usada en la rehabilitación del tobillo. Puede medir dislocaciones y aplicar fuerzas y esfuerzos de torsión en seis grados de libertad. Se programan simulaciones de situaciones en donde es necesario realizar determinados movimientos del tobillo. Para permitir que los pacientes terminen las rutinas, las simulaciones se modifican para requisitos particulares a sus capacidades. Además, la complejidad del ejercicio, así como efectos visuales y hápticos son fijados por el terapista, y se puede también cambiar en tiempo real. Una base de datos almacena resultados del ejercicio que luego pueden ser presentados gráficamente.
Figura 7. Sistema VR basado en la rehabilitación del tobillo (Tobillo de Rutgers).
A. Toth 2006 [2] La terapia mediante robots se configura en tres fases principales: primeramente el fisioterapeuta programa los robots demostrando una serie de ejercicios básicos hechos en presencia del paciente. A continuación se editan los ejercicios individualmente, adecuándolos a las necesidades del paciente, y se combinan para producir un programa terapéutico complejo personalizado. Finalmente, los robots reproducen el
86

programa, permitiendo al fisioterapeuta cambiar el orden, la velocidad y el número de repeticiones de cada fase. Los robots también contribuyen a supervisar el progreso del paciente con registros detallados del régimen de ejercicios y de las respuestas del mismo.
CONCLUSIONES
Los robots paralelos son mecánicamente sencillos de fabricar y menos costosos que los robots seriales, son fuertes y precisos, además tienen una elevada rigidez y bajo peso por lo cual es seguro que tienen un lugar garantizado en la tecnología de la rehabilitación médica, éste es el primer paso del proceso de rehabilitación de las personas con discapacidad, por lo cual, éste primer paso debe ser lo suficientemente robusto como para permitir alcanzar la meta que se desea, la plena integración social de la persona.
REFERENCIAS
[1] A Gupta 2004). Design and Control of a Haptic Arm Exoeskeleton.
[2] A. Toth, I. Ermolaev (2006). Robots para los pacientes.
[3] C. Gosselin and J. Angeles. A global performance index for the kinematic optimization of robotic manipulator. Trans. ASME J. Mech. Des., 113:220‐226, 1991.
[4] C. Paolinelli (2003). Medicina Física y Rehabilitación, un desafío del futuro.
[5] Haug, E.J. (1989). Computer aided kinematics and dynamics of mechanical systems. Allyn and Bacon.
[6] Kelly, R. and V. Santibañez (2003). Control de movimiento de robots manipuladores. Prentice‐Hall.
[7] Merlet, J.P. (1997). Les robots paralleles. Hermes.
[8] M. Girone, G. Burdea, M. Bouzit and V. Popescou (2001). A Stewart Platform‐Based System for Ankle Telerehabilitation.
[9] Saltaren, R.J. (1996). Herramientas para el modelado diseño perimétrico de robots, basadas en la dinámica de sistemas multicuerpos. PhD thesis. Politechnic
[10] R.Aracil, R.J.Saltaren, J.M.Sabater y O.Reinoso (2006). Robots Paralelos. Máquinas con un pasado para una Robotica del futuro.
[11] Roque J. Saltaren, et al. Performance evaluation of spherical parallel platforms for humanoid robots. ROBOTICA, Cambridge University Press (in press) 2006
[12] R. Saltaren, R. Aracil, E. Yime, J. Sabater and M. ferre (2006). Concepción de Robots Paralelos. Universidad Politécnica de Madrid, Universidad Miguel Hernández.
[13 ] R.F. Boian, C.S. Lee, J.E. deutsch, G.C. Burdea and J.A. Lewis (2002). Virtual Reality‐based System for Ankle Rehabilitation Post Stroke
87

88
[14] Tsai, L.W. (1999). Robot Analysis: the mechanics of serial and parallel manipulators. Wiley Interscience. John Wiley and Sons.

Proyecto educativo en Leganés, una Ciudad Digital
Virginia Moreno Bonilla Directora de Sistemas de la Información
del Ayuntamiento de Leganés
Resumen
La introducción de las Tecnologías de la Información y las Comunicaciones se hacen necesarias en el actual contexto de cambio educativo exigido por una nueva realidad social. Las funciones del profesorado son más complejas que nunca, debiendo responder a necesidades de una población estudiantil diversa y cambiante, y a las demandas que generan las nuevas condiciones, entre ellas, la necesidad de preparar a los ciudadanos para ser capaces de seguir aprendiendo a lo largo de toda su vida, y el uso de las tecnologías como nuevo canal de comunicación y gestión.
1. Introducción
El proyecto educativo se enmarca dentro del Proyecto Leganés Ciudad Digital, bajo el lema de Leganés Soci@l, tiene como objetivo principal el acercar al ciudadano la información y los servicios de los que dispone una administración local, creando un nuevo canal de comunicación, lo que implica, además de la mejora de las infraestructuras de comunicación desde el punto de vista tecnológico, la mejora de la accesibilidad, planteando y desarrollando actividades de forma conjunta y relacionadas con la creación de los servicios digitales que permitan que todos los ciudadanos y ciudadanas con independencia de que puedan tener algún tipo de discapacidad, no se encuentren familiarizados con el uso de las nuevas tecnologías, o se trate de personas de edad avanzada (las cuáles puedan sentirse inseguras o confusas con el uso de estas nuevas herramientas que el Ayuntamiento de Leganés pone a su disposición), puedan emplearlas sin ningún tipo de exclusión social y / o cultural.
2. Participantes en el Proyecto
El proyecto educativo que lidera el Ayuntamiento de Leganés está siendo pilotado en 12 centros educativos del Municipio.
El desarrollo de los proyectos educativos para la utilización de las TIC en los centros docentes, es de aplicabilidad actualmente, en todos los centros públicos del distrito de Zarzaquemada de Leganés.
• Un Colegio de educación especial: Alfonso X El Sabio,
• Nueve Colegios de Primaria, y
89

• Dos Institutos de Enseñanza Secundaria.
3. El Ayuntamiento de Leganés hace una propuesta de futuro con los Colegios
Hoy en día, España se sitúa en el uso de las nuevas tecnologías en el marco Europeo únicamente por delate de Grecia e Italia. El uso de las nuevas tecnologías no sigue un patrón ordenado con unos parámetros cuantificables, indudablemente el nivel socio‐económico de la región, la situación del tejido empresarial, etc. son factores que condicionan la utilización de las nuevas tecnologías, lo que sí está claro, es que la formación, la educación en el uso de las nuevas tecnologías, la familiaridad de los niños‐as y jóvenes acerca de la utilización de estos nuevos servicios telemáticos en sus actividades más cercanas, utilización de diccionarios enciclopédicos on‐line, reservar de entradas de cines y teatros, etc. fomenta el uso de las nuevas tecnologías, así como la capacitación de niños‐as y jóvenes en el correcto uso de estos nuevos modelos de comunicación.
4. Principales Actuaciones del Proyecto
• Equipamiento y dotación de Infraestructuras.
• Soporte de Apoyo Técnico a los Centros.
• Contenidos en Internet
• Difusión y divulgación del Proyecto
• Seguimiento del nivel de uso y aceptación de los nuevos servicios e infraestructuras
• Disponer de un nuevo modelo educativo
• Modelo de acceso a información exportable a otros colectivos
5. Actuación de dotación de infraestructuras
Se ha dotado a cada centro con 3 portátiles, un cañón de proyección, una pantalla desmontaje, así como un Punto de Información para el alumnado y profesorado del centro. En el caso del Centro Público de Educación Especial Alfonso X El Sabio, dicho Punto de Información dispone de una carcasa especial infantil.
Imagen 1. Dotación de infraestructuras cada centro.
90

6. Actuación de Soporte y apoyo técnico a los centros educativos
Se ha creado un equipo de apoyo técnico a padres y profesores, compuesto por cuatro ingenieros informáticos que se desplazarán a los centros educativos para asegurar el adecuado mantenimiento de los equipos e infraestructuras utilizados en el proyecto.
De igual forma, una de las iniciativas que ha contado con un rotundo éxito ha sido el de realizar con una periodicidad acordada con los responsables de los centros, charlas informativas impartidas por estas personas para comunicar y divulgar aspectos tan importantes tales como:
• Cómo hacer que sus alumnos e hijos naveguen de una forma segura en internet
• Qué es un filtro de contenidos y como puedo tenerlo en casa o en el aula
• Consejos útiles para un uso responsable de Internet
• ¿Sabemos lo que significa infoaccesibilidad?
• ¿Sabemos lo que significa accesibilidad?
• Qué aplicaciones puedo instalar en mi ordenador si mis alumnos, mi hijo.., o yo no puedo...
7. Contenidos en Internet
Dado que uno de los principales inconvenientes para el acceso a Internet de las personas que no lo tienen accesible en su hogar, era por una de estas razones:
• coste del acceso a la banda ancha
• desconocimiento del uso de internet
• dificultad con el teclado
El Ayuntamiento de Leganés, ha optado por la implantación en cada centro Educativo de un punto de información táctil que puede ser utilizado por parte de los alumnos, los profesores y los padres y madres de alumnos de los centros educativos, convirtiendo esta herramienta en un punto de acercamiento de todos ellos.
Puesto que el acceso es táctil no es necesario conocer las teclas del dispositivo de entrada teclado y ser conocedor del modo de uso de un ratón.
Otra de las ventajas es el desarrollo de una home la cual se convierte en un escritorio que aglutina las principales web y las mejores o referentes en cada materia en función del público objetivo donde se encuentro ubicado cada uno de los puntos de información.
En el caso de los centros educativos la web desarrollada permite el acceso, a enciclopedias on‐line, becas, recursos educativos, bibliotecas on‐line, ocio y cultura, lecturas recomendadas, etc.
91

Imagen 2. WebEduca del Ayuntamiento de Leganés.
8. Difusión y divulgación del Proyecto
Se trata de asegurar que todos los colectivos afectados por las iniciativas y directamente beneficiados de las soluciones, propuestas, acciones formativas, uso de nuevos dispositivos de entrada y salida de información, etc. sean conocedores del proyecto, de sus objetivos, de su alcance, y conozcan uno de los aspectos más importantes, en qué pueden y deben participar, qué se espera de ellos, cómo podemos mejorar nuestros proyectos, nutriéndonos de sus experiencias, necesidades y expectativas. Es por esto, por lo que el Ayuntamiento de Leganés, ha realizado un esfuerzo importante en dar a conocer todas las iniciativas del proyecto educativo, presentar las mismas a Asociaciones de Padres y Madres de Alumnos, a profesores y a alumnos de centros educativos convencionales y centros educativos de educación especial.
En la celebración en el Municipio del Día de Internet que como en el resto de España., está siendo un evento de nueva creación cuyo objetivo es fomentar el uso de las nuevas tecnologías en todas las tareas de nuestra vida cotidiana, se ha tenido un espacio muy especial a este proyecto, además de la preparación de jornadas en tono lúdico al que todos los niños y adolescentes siempre están invitados para conocer los avances y resultados del proyecto.
El proyecto educativo, ha estado presente en todos los eventos relacionados con las nuevas tecnologías en los que ha estado presente el Ayuntamiento de Leganés. Tales eventos son entre otros, SIMO 2004 y 2005, Jornadas de Ciudades Digitales I, II y III, Tecnimap 2004, 2005 y 2006, etc.
Imagen 3. Spot publicitario Leganés Ciudad Digital con niños haciendo uso de páginas Webs Educativas.
92

9. Seguimiento del nivel de uso y aceptación de los nuevos servicios e infraestructuras
Uno de los objetivos del proyecto educativo, es el de potenciar el uso de nuevos sistemas, elementos informáticos, periféricos, etc. que potencien el acercamiento de los niños y adolescentes al uso de la tecnología como un medio convencional y complementario al resto de elementos educativos con los que se encuentran familiarizados, así como a la identificación del grado de éxito entre los alumnos y profesores, puntos fuertes y áreas de mejora de cada uno de los elementos en nuevo uso.
Uno de los ejemplos es el ser el municipio de Leganés, el primero en instalar un equipo KidSmart en un centro de educación especial en el que se trabajan e imparten las siguientes áreas:
• EBO: Educación Básica Obligatoria.
• TGD: Trastorno General del Desarrollo.
• TVA: Transición de la Vida Adulta.
• Discapacidades motóricas y visuales.
Con el objetivo de ofrecer:
• Ayuda para el aprendizaje de educación especial.
• Asimilación de conceptos básicos.
• Ayuda a fomentar la creatividad.
• Conseguir una evaluación del aprendizaje infantil.
Y estar presentes en como ponentes en “Primer Encuentro Nacional Profesores KidSmart” liderado por IBM.
10. Disponer de un nuevo modelo educativo
Nos encontramos en un momento en el que el adiestramiento mediante medios informáticos y multimedia se encuentra en pleno apogeo, es por eso que la alfabetización digital ha de ocupar un papel preponderante porque sin un mínimo conocimiento informático los alumnos no podrán alcanzar un rendimiento óptimo en sus estudios.
Se trata por lo tanto de un tipo de enseñanza recurrente ya que, se sirve del adiestramiento en materia informática para alcanzar conocimientos en esta área y también en el resto de áreas en materia educativa, habilidades, destrezas, creatividad, etc...
Desde el año 2003 la Unión Europea ha llevado a cabo una apuesta clara para extender la alfabetización digital al conjunto de la comunidad y ha realizado importantes inversiones para potenciar el uso de Internet en centros educativos y culturales. Hoy en día se hace más patente la necesidad de que todos dispongamos de unos mínimos conocimientos informáticos ya que esta tecnología se encuentra presente en todos los aspectos de nuestra vida.
93

Desde el proyecto Leganés Ciudad Digital se intenta dar un giro vertiginoso en el municipio respecto a la implantación de nuevas tecnologías y nuevos servicios y formas de comunicación.
Se trata de un ambicioso proyecto que abarca una gran variedad de subproyectos, todos ellos con el objetivo de crear una plataforma tecnológica común en el municipio, sin olvidar la faceta de gran interés social, ya que se pretende incentivar sobre todo a los colectivos más desfavorecidos y que se han quedado atrás en la carrera tecnológica como son los niños, personas con necesidades especiales y personas mayores.
De esta forma Leganés Ciudad Digital acepta el reto de la Alfabetización Digital incluyendo en sus principales líneas de actuación, tareas encaminadas a capacitar a una persona en los conocimientos básicos necesarios para utilizar un ordenador, los servicios digitales que esta administración local pone a disposición de todos sus ciudadanos, así como a la gran red de redes Internet.
Como aspecto novedoso, el proyecto contempla a todos los participantes de la aventura educativa: profesores, alumnos, equipo directivo y sin olvidar a los padres, al colocarse el Punto Informativo con acceso a Internet gratuito en los hall de los centros escolares elegidos, lugar de encuentro de todos los participantes.
Partiendo del hecho real de que no todo el mundo tiene acceso a internet en su domicilio, este servicio, se convierte en una gran ayuda, una gran utilidad y un beneficio social por ser de carácter ilimitado y gratuito.
Este acceso a internet dispone de una gran espacios web de interés especial entre el público infantil y juvenil, padres y profesores (deportes, medicina, ocio, didáctica, organismos oficiales, defensor del menor, etc.)11. Modelo de acceso a información exportable a otros colectivos
Todos los resultados de la experiencia tales como:
El uso de puntos de información en exteriores
Tecnología Táctil como medio de navegación y acceso a contenidos
Tecnología Bluetooth (descarga de información a móviles)
Integración de diversos periféricos
Software abierto permitiendo la integración de servicios de terceros
Lector de tarjetas magnéticas y de chip
Multimedia: audio, vídeo, imágenes, cámara de video
son fácilmente exportables a otros colectivos o servicios municipales tales como servicios digitales para mayores, telecentros, enciclopedias on‐line, plataformas de autoformación, etc.
El hecho de verificar la utilización del material de dotación para modernizar el acto educativo y adecuarse a la nueva era tecnológica, el obtener métricas que reportan el grado de utilización
94

del servicio y el grado de aceptación del mismo, así como el obtener experiencia hace que sea viable el apostar por construir un modelo extensible a otros colectivos.
Imagen 4. Puntos de Información táctil y pupitre KidSmart en centros educativos de Leganés.
95

Servicios de telecomunicación presentes y futuros universalmente accesibles
Julio Abascal Laboratorio de Interacción Persona Computador
para Necesidades Especiales Universidad del País VascoEuskal Herriko Unibertsitatea
1. Introducción
El COST219 ter “Accessibility for All to Services and Terminals for Next Generation Networks”10 es un grupo de trabajo europeo11
12
13
dedicado a la promoción de la accesibilidad y el diseño para todos de las nuevas tecnologías de telecomunicaciones. Fue aprobado por la acción europea de colaboración científica internacional COST , con una duración de cuatro años (de 2003 a 2006) y ha recibido recientemente una extensión de un año (para el 2007). Como culminación de los trabajos de la primera etapa ha publicado en enero de 2007 un libro titulado: “Towards an Inclusive Future: Impact and Wider Potential of Information and Communication Technologies” editado por el presidente del COST219 ter, Patrick R. W. Roe, en el que han colaborado la mayoría de los miembros del grupo y algunos autores invitados. El libro está accesible en Internet en formatos PDF y HTML y se pueden solicitar copias en papel a los representantes nacionales.
2. Servicios telemáticos accesibles presentes y futuros
Esta presentación, basada en los contenidos de los primeros capítulos del libro, reúne diversos ejemplos de buenas prácticas que han sido seleccionados con el objetivo de dar una visión de la posible evolución desde las tecnologías de telecomunicación actuales a los servicios que en el futuro serán provistos por “entornos inteligentes”. El principal objetivo es dar una primera impresión de las tendencias actuales en servicios accesibles para las personas con discapacidad y vislumbrar su aplicación futura a las necesidades de las personas con restricciones físicas, sensoriales o cognitivas (que pueden serlo debido a la discapacidad, el envejecimiento o a las condiciones especiales o el equipo que se usa para acceder). Los ejemplos que se muestran dan un paso adelante en el uso de la tecnología existente actualmente para proveer nuevos servicios accesibles y permiten analizar la posible evolución de los mismos y su impacto sobre las personas con discapacidad y ancianas. Además, este tipo de experiencias son útiles para evitar que los entornos inteligentes que se desarrollen resulten inaccesibles.
10 http://www.tiresias.org/cost219ter/about.htm 11 Cuenta con miembros de diversos países europeos: Belgium, Cyprus, Denmark, Finland, France, Germany, Greece, Ireland, Italy, Norway, Portugal, Slovenia, Spain, Sweden, Switzerland, The Netherlands, United Kingdom, y no europeos: Australia, Israel y United States of America. 12 http://www.cost.esf.org/ 13 http://www.tiresias.org/cost219ter/inclusive_future/index.htm
97

Nuevas tecnologías para la ayuda a las personas con discapacidad y los ancianos
Los avances tecnológicos en el campo del a Robótica proveen dispositivos y técnicas para sensorización, posicionamiento, navegación, etc. Estas técnicas han hecho posible el desarrollo de dispositivos para ayudar a personas con restricciones físicas, sensoriales o cognitivas a navegar en interiores y exteriores. En el apartado “Navegación segura con tecnología moderna” se describe en detalle de la tecnología de soporte a la navegación humana actual y se discuten sus posibilidades futuras.
Por otro lado, es sabido que la voz es el principal medio de comunicación entre las personas. Sin embargo algunos usuarios con discapacidad experimentan restricciones de voz que limitan su capacidad de comunicación. La tecnología de voz actual puede traducir de texto a voz y de voz a texto (aunque esta última sin suficiente calidad y fiabilidad aun) lo que permite el diseño de diversos dispositivos y servicios de mediación. Estos servicios incluyen, por ejemplo, la lectura en voz alta de textos para personas con restricciones de visión y el control de dispositivos de modo más natural, mediante órdenes orales. La sección dedicada a “Procesamiento de voz para personas con discapacidad” repasa las aplicaciones de las tecnologías del habla actuales y especialmente las futuras, que permitirán mejorar las comunicación de las personas con discapacidad y ancianas.
Nuevos servicios remotos
Actualmente están disponibles tecnologías de comunicación de banda ancha que permiten la implantación de servicios avanzados para dar soporte a las personas con discapacidad y ancianas. En diversos países se están probando con éxito servicios de soporte remoto, comunidades virtuales, comunicaciones mejoradas, etc. La sección “Servicios basados en Banda Ancha: nuevas oportunidades para las apersonas con discapacidad” describe siete experiencias de servicios de soporte basados en banda ancha desarrollados por la Agencia Nacional de Correos y Telecomunicaciones sueca, PTS, con el objetivo de evaluar la validez de los servicios de telecomunicaciones actuales y futuros para proveer soporte remoto adaptado a las necesidades de grupos específicos de usuarios con discapacidad.
Los sistemas de soporte remotos actúan usualmente como mediadores entre usuarios, de los que uno, al menos, tiene una discapacidad que le impide usar dispositivos o servicios de telecomunicación estándar. Estos servicios son capaces de traducir de signos a voz y vice‐versa, de texto a voz y vice‐versa, etc. También pueden proveer otros servicios tales como la descripción para un apersona ciega de una imagen que esta les envía. Por otro lado, algunos servicios de soporte remoto preexistentes pueden ser mejorados, universalizados y abaratados por medio de las tecnologías de telecomunicación avanzadas disponibles. La sección “Acceso a servicios de soporte remoto mediante vídeo a través del intérprete de bolsillo (3G) e Internet” presenta dos experiencias de soporte remoto a personas sordas signantes: un servicio de videotelefonía para soporte remoto basado en IP y un teléfono de bolsillo de tercera generación para video comunicación móvil.
El uso eficiente de los servicios de soporte remoto requiere un número de pasos que deben ser realizados adecuadamente para acelerar su aprovechamiento. La sección “Invocación adecuada de servicios de soporte remoto” describe el mejor modo de llamar diversos servicios
98

de soporte remoto actualmente existentes en Suecia. Estas experiencias deben ser tomadas como ejemplos de buenas prácticas que pueden ayudar a optimizar el diseño del acceso a los servicios de soporte remoto futuros.
La enorme difusión del os SMS (Short Message Services) ligada a la expansión del a telefonía móvil se asocia frecuentemente a las comunicaciones utilizadas por los jóvenes. Los SMS son más baratos que las llamadas y no requieren que ambos interlocutores estén simultáneamente en comunicación. Sin embargo, los SMS pueden ser útiles para otros grupos de población. En la sección “Modos de uso de los teléfonos móviles por personas con demencia” se muestra una interesante aplicación de los SMS que muestra que las personas mayores con restricciones cognitivas pueden hacer uso de esta tecnología para comunicación y soporte a través de comunicación verbal, textual o simbólica.
Además, la tecnología SMS ha sido usada en la “Implementación de un servicio de emergencia basado en SMS” en Finlandia que permite, no sólo a personas con sordera sino también a cualquier otro usuario, contactar el servicio de emergencia universal 112 enviando mensajes de texto de emergencia. Una vez contactado el servicio, éste manda un mensaje de acuse de recibo y el usuario es localizado para ser atendido.
Evolución del a telefonía de texto
La telefonía de texto es actualmente el medio de comunicación básico para muchas personas con discapacidad, como por ejemplo las personas sordas. La tecnología que da soporte a la telefonía móvil no permite la extensión del a telefonía de texto tradicional. Por esta razón, muchos usuarios sustituyen la telefonía de texto por los mensajes SMS., pero esto no permite la comunicación interactiva. Por ello, resulta necesario desarrollar nuevos servicios de telefonía de texto móvil.
Como la siguiente generación de telefonía de texto en Europa está en desarrollo, es necesario establecer pautas de diseño básicas que garanticen la calidad del servicio. La sección “Recomendaciones de los países Nórdicos sobre la funcionalidad del a telefonía de texto” reúne los criterios de movilidad, interoperabilidad, continuidad, accesibilidad desde Internet y disponibilidad de los servicios de soporte remoto.
Se han desarrollado diversas experiencias para proveer telefonía de texto móvil a través del acceso a servidores de Internet. La sección “Telefonía de Texto móvil y basada en IP” muestra el despliegue de este servicio en Suecia. Por otro lado, la sección “Telefonía de Texto móvil basada en comunicaciones GPRS” presenta los resultados obtenidos en esta área por un proyecto español.
Participación del usuario en la tecnología
Con la atracción de un mercado creciente, existe la posibilidad de que cada vez más compañías comercialicen en el futuro dispositivos que puedan ser usados por personas con discapacidad y ancianas. Dado que los conceptos relacionados con la accesibilidad pueden ser interpretados de diversas maneras, los consumidores pueden descubrir que algunos productos que han sido anunciados como completamente accesibles, directos y de fácil uso, no satisfacen realmente sus necesidades. Es en este contexto que la disponibilidad de especificaciones funcionales de
99

los terminales son esenciales, de manera que los productos puedan ser evaluados y certificados para dar al usuario una garantía de la adecuación de un determinado producto o servicio a sus necesidades. La sección “Especificación funcional para adquisición de terminales” presenta un ejemplo de buenas prácticas en este área, que será determinante en el futuro.
Los Hogares Inteligentes y la Inteligencia Ambiental
El término Hogar Inteligente, se ha usado para introducir el concepto de entornos domóticos que asisten a las personas que los habitan mediante la aplicación de diversas tecnologías, entre ellas las redes de telecomunicaciones. La aplicación de los conceptos de Inteligencia ambiental promete entornos adaptados a las necesidades de los usuarios que facilitan sus actividades. Existe una gran experiencia en hogares inteligentes que puede ser aprovechada para desarrollar los entornos inteligentes. El capítulo “Entorno de hogares inteligentes” analiza las características actuales y futuras de los hogares inteligentes y la necesidad de diseñar interfaces de usuario adecuadas.
Se han hecho prospectivas del impacto de los nuevos entornos inteligentes para las personas con discapacidad y los resultados no siempre son satisfactorios. Es pues necesario tener en cuenta las características de las personas con discapacidad y ancianas a la hora de diseñar la tecnología de soporte a la Inteligencia Ambiental, de modo que el resultado no sean entornos accesibles para todos excepto para las personas con discapacidad. Además, es necesario estudiar y dar solución a los problemas éticos y sociales que pueden presentar estos entornos. En el capítulo “Implicaciones de la Inteligencia Ambiental para las personas con discapacidad” se tratan estos problemas mediante la crítica de los escenarios propuestos por el ISTAG.
3. Conclusiones
Las experiencias de servicios basados en las tecnologías de telecomunicación actuales demuestran que ya es posible el desarrollo de dispositivos y servicios de alta calidad para el soporte a las personas con discapacidad. Sin embargo las prospectivas realizadas por diferentes entidades no son optimistas respecto a la accesibilidad de los nuevos entornos. Es por ello necesario que las necesidades de los usuarios con restricciones físicas, sensoriales o cognitivas sean tenidas en cuenta en el desarrollo de los futuros sistemas y servicios para evitar que resulten inaccesibles.
Agradecimientos
Agradezco la información aportada por los miembros del COST 219 ter y por los autores invitados, Santiago Aguilera, Ilse Bierhoff, Robert Hecht y Jan‐Ingvar Lindström que colaboraron en el libro “Towards an Inclusive Future: Impact and Wider Potential of Information and Communication” y especialmente la inestimable ayuda de Patrick Roe en la edición del Capítulo 2.
Referencias
Abascal J., Nicolle C., (2005). Moving towards inclusive design guidelines for socially and ethically aware HCI. Interacting with Computers. Vol. 17, Issue 5. Pp. 484‐505
100

Abowd G., Mynatt E., Rodden T., (2002). The Human experience. IEEE Pervasive Comp., 1 (1), 48‐57
American Association for Artificial Intelligence; http://www.aaai.org/AITopics/html/rooms.html
Andersson, C., (2001). GPRS and 3G Wireless Applications: Professional Developer's Guide, ISBN: 0471414050, John Wiley & Sons
Bachmann, G., (2002). Palm Programming The Authoritative Solution, 2nd Edition.
Barros M.J., Maia R., Tokuda, K. Resende, F.G., Freitas, D., (2005). HMMbased European Portuguese TTS System, artigo apresentado e publicado nas actas da Interspeech'2005 ‐ Eurospeech — 9th European Conference on Speech Communication and Technology, Lisboa
Beresford, A., Stajano, F., (2003). Location privacy in pervasive computing. IEEE Pervasive Computing vol. 2, no. 1, pp. 46–55
Bohn J., Coroama V., Langheinrich M., Mattern F., Rohs M., (2005). Social, Economic, and Ethical Implications of Ambient Intelligence and Ubiquitous Computing.W.Weber, J. Rabaey, E. Aarts (Eds.): Ambient Intelligence, Springer‐Verlag, ISBN 3‐540‐23867‐0, pp. 5‐29
Botinis (ed.) et al., (1997). Intonation: Theory, Models and Applications.Proceedings of the ESCA Worksop Sept. 18‐20 Athens, Greece
Brasher, H., Starner, T. et al., (2003). Using Multiple Sensors for Mobile Sign Language Recognition. ISCW White Plains,WA, Also: http://www‐static.cc.gatech.edu/~thad/031_research.htm
Buchanan M., (2004). ISTAG Report on Grand Challenge in the Evolution of the Information Society ‐Retrieved February 24, 2005 from ftp://ftp.cordis.lu/pub/ist/docs/2004_grand_challenges_web_en.pdf
Burghardt, F. et al., (2006). Examples of synthesized emotional speech http://emosamples.syntheticspeech.de/
Casas R., Marco A., Falcó J. L, Artigas J. I., Abascal J., (2006). Ethically Aware Design of a Location System for People with Dementia. In K. Miesenberger et al. (Eds.): ICCHP 2006, LNCS 4061, pp. 777‐784. Springer‐ Verlag
Casert, R., (2004). Rathenau Institute’s Workshop Ambient Intelligence: In the service of Man? EUSAI 2004 symposium, November 8‐10, 2004, Eindhoven University of Technology, The Netherlands
Charter of Fundamental Rights of the European Union, OJ C 364, 18.12.2000, p. 1. http://www.europarl.eu.int/charter/pdf/text_en.pdf, 2000
101

Clarke, R., (1999). Person‐Location and Person‐Tracking: Technologies. Risks and Policy Implications. Proceedings of International Conference on Privacy and Personal Data Protection. Hong Kong; 131–150
Crispien, K., Fellbaum, K. (1995). Use of Acoustic Information in Screen Reader Programs for Blind Computer Users: Results from the TIDE Project GUIB. In: Placencia Porrerro, I.,& de la Bellacasa, R. P., (Eds.): The European Context for Assistive Technology ‐ Proceedings of the 2nd TIDE Congress, Paris, , IOS Press, Amsterdam
Deller, J.R., (2000). Discrete‐time processing of speech signals. New York : Institute of Electrical and Electronics Engineers. DRAGON Naturally Speaking Professional Engine, (2006)
Directive 95/46/EC on the processing of personal data
Directive 97/66/EC on the protection of privacy and the processing of personal data in the telecommunications sector
Ducatel K., Bogdanowicz M., Scapolo F., Leijten J., Burgelman J‐C., (2001). ISTAG ‐ Scenarios for Ambient Intelligence in 2010 – Retrieved February 24, 2005 from http://www.cordis.lu/ist/istag.htm
Emiliani, P.‐L., & Stephanidis, C., (2005). Universal Access to Ambient Intelligence Environments: Opportunities and Challenges for People with Disabilities. IBM Systems Journal, special issue on Accessibility, 44 (3), 605‐619
Estrin D., Culler D., Pister K., Sukhatme G., (2002). Connecting the Physical world with pervasive Networks, IEEE Pervasive Computing, 1 (1), 59‐69
European Council, (2000). Lisbon Extraordinary European Council, 23‐24 March 2000 ‐ Retrieved February 24, 2005 from http://ue.eu.int/ueDocs/cms_Data/docs/pressData/en/ec/00100‐r1.en0.htm
Ferreira, H., Freitas, D., (2005). AudioMath—Towards Automatic Readings of Mathematical Expressions”, 11th International Conference on Human Computer Interaction, Las Vegas, EUA.
Ferreira. http://lpf‐esi.fe.up.pt/~audiomath
FICORA, (2005). Implementation of an SMS‐Based emergency service in Finland ficora.fi/englanti/document/WGReport022005.pdf
Foster, L.R., (2002). Palm OS Programming Bible 2nd Edition. John Wiley & Sons
Friedewald, M. et.al. (ed.), (2006). Safeguards in a World of Ambient Intelligence (SWAMI). Deliverable D1. IST, 6th Framework Programme. January 2006
Furui, S., (2001). Digital speech processing, synthesis, and recognition 2nd ed., rev. and expanded. New York : Marcel Dekker
102

103
Geer D., (2004). Will gesture recognition technology point the way?, IEEE Computer, 37(10), 20‐23
Heine, G., Sagkob, H., (2003) GPRS: Gateway to Third Generation Mobile Networks. Mobile Communications Series, Artech House
IST Advisory Group (2003). Ambient Intelligence: from vision to reality – Retrieved February 24, 2005 from ftp://ftp.cordis.lu/pub/ist/docs/istag‐ist2003_consolidated_report.pdf
Krell, B., (2002). Pocket PC Developer's Guide, Osborne/McGraw‐Hill, US
Lewis, C., & Rieman, J., (1994). Task‐Centred User Interface Design:A Practical Introduction. Electronically available at: http://www.syd.dit.csiro.au/hci/clewis/contents.html
Lorincz K., Malan D., Fulford‐Jones T., Nawoj A., Clavel A., Shnayder V., Mainland G., Welsh M., Moulton S., (2004). Sensor Networks for Emergency Response:Challenges and Opportunities, IEEE Pervasive Computing, 3(4), 16‐22
Makofsky, S., (2003). Pocket PC Network Programming, Addison‐Wesley Professional
NFTH, (2005). The recommendations of the Nordic countries regarding functionality for text telephony. http://www.nuh.fi/NFTH_2‐2005.doc
NUANCE communications. http://www.nuance.com/naturallyspeaking/
PTS (2004). Broad band for people with disability. http://www.pts.se/Dokument/dokument.asp?Sectionid=&Itemid=4615&Languageid=EN
PTS (2005). Mobile video communications for people who are deaf. http://www.pts.se/Dokument/dokument.asp?Sectionid=&Itemid=3745&Language
PTS (2006). “Convenient invocation of Relay Services ‐ A pre‐study conducted by Omnitor, commissioned by the PTS ‐ PTS‐ER‐2006:5”. http://www.pts.se/Dokument/dokumentlista.asp?SectionId=2884
Roe, P.R.W. (Ed.), (2001). Bridging the Gap? Access to telecommunications for all people. COST 219bis

Servidor de procesos en Java para una instalación domótica EIB
Francisco Cilleruelo Trotter y Jorge Alva Alarcón E.U.I. Universidad Politécnica de Madrid y Universidad Carlos III de Madrid
Resumen
Este proyecto se trata de una aplicación, desarrollada en Java, que funciona como servidor de procesos para una instalación domótica basada en el estándar europeo EIB (European Installation Bus). En nuestro caso, esta instalación consta de un conjunto de viviendas dentro de un mismo edificio, que se conectan a nuestro servidor por medio de Ethernet. Para que nuestro servidor se comunique con la unidad de acoplamiento al bus EIB (BCU), utiliza como interfaz de comunicación el puerto serie (RS‐232). Esta aplicación se presenta mediante un interfaz gráfico, que permite la gestión, control y monitorización de los dispositivos conectados al bus. Además este trabajo tiene entre sus principales prioridades proveer de una aplicación de estas características que sea de libre distribución.
1. Introducción
En Europa, de entre todos los protocolos y estándares presentes para la domótica, es el estándar EIB el de mayor auge y consolidación. En la actualidad, para la administración de las instalaciones EIB, existen múltiples aplicaciones. Estas aplicaciones se caracterizan por ser de código propietario, lo que limita el desarrollo modular o mejora de estas aplicaciones por parte de otros programadores. En cambio este trabajo, pretende mostrar una alternativa de código libre.
En nuestro caso, el desarrollo de este trabajo se ha enfocado al control, administración y monitorización de un conjunto de viviendas pertenecientes a una misma instalación domótica. Estas viviendas están conectadas por medio de una red Ethernet a nuestro servidor.
Por estas razones esta aplicación se enfoco como un servidor de procesos desarrollado en Java con la capacidad de administrar dispositivos y usuarios. Y son estos usuarios los que realizan peticiones a nuestro servidor para cambiar o conocer el estado de sus propios dispositivos.
2. Domótica y EIB
Definición
Por domótica entendemos la incorporación al equipamiento de nuestras viviendas y edificios de una sencilla tecnología que permita gestionar de forma energéticamente eficiente, segura y confortable para el usuario, los distintos aparatos e instalaciones domésticas tradicionales que conforman una vivienda (la calefacción, la lavadora, la iluminación...).
105
La domótica busca el aprovechamiento al máximo de la energía y luz solar adecuando su comportamiento a nuestras necesidades.
El European Installation Bus (EIB) se ha pensado para ser utilizado como un sistema de gestión de la instalación eléctrica de un edificio. Su propósito comprende la monitorización y control de sistemas tales como el alumbrado, la calefacción, el aire‐acondicionado, ventilación, persianas y alarmas de un edificio.
El estándar EIB ha sido propuesto por la EIBA (European Installation Bus Association) que es la organización que reúne a empresas europeas de instalación eléctrica para impulsar el desarrollo de sistemas de edificios y conseguir ofrecer en el mercado europeo un sistema único de alta fiabilidad.
Tecnología
El bus EIB se puede definir como un sistema descentralizado en el que cada uno de los dispositivos conectados tiene control propio. Cada uno de los dispositivos tiene su propio microprocesador, y se pueden clasificar en sensores, que son los responsables de detectar actividad en el edificio, y en actuadores, que son capaces de modificar el entorno.
La EIBA propone una especificación abierta en la cual todos los dispositivos se conectan a través de la única línea de bus existente, sin precisar un control centralizado. Se basa en el protocolo CSMA/CA para solucionar el acceso al medio físico. Los sensores se comunican mandando telegramas a los actuadores los cuales ejecutan los comandos apropiados.
El bus se adapta fácilmente a distintos tamaños y topologías pudiéndose conectar hasta 10000 dispositivos. El bus es independiente del medio físico que se utilice estando disponibles los siguientes:
• Par trenzado (9600bps).
• Red eléctrica (1200/2400bps, en un principio para 230V y 50Hz).
• EIB.net (10 Mbps sobre Ethernet).
• Radio Frecuencia.
• Infrarrojos.
Las instalaciones que existen en la actualidad están implementadas sobre par trenzado y en menor media sobre red eléctrica, pudiendo tener elementos que se comunican mediante infrarrojos o radio frecuencia.
Topología
La red del EIB se estructura de forma jerárquica. La unidad más pequeña se denomina línea, a la cual se pueden conectar hasta un máximo de 64 dispositivos. La topología de la línea es libre, siempre y cuando respete:
• Que haya al menos una fuente de alimentación.
106

• Que la longitud total no supere los 1000m.
• Que la distancia máxima entre la fuente de alimentación y un dispositivo sea menor de 350m.
• Que la distancia máxima entre dispositivos no supere los 750m.
• Que mínima distancia entre dos fuentes de alimentación dentro de una misma línea sea mayor de 200 m.
Imagen 1. Topología de línea bus EIB.
Las líneas se agrupan en áreas. El área se compone de una línea principal del cual cuelgan hasta 15 líneas secundarias. Por tanto, un área podrá tener como máximo 960 dispositivos. Cada una de las líneas secundarias se conecta con la línea principal mediante un dispositivo llamado acoplador de línea. La línea principal deberá tener su propia fuente de alimentación.
A su vez se puede disponer de hasta 15 áreas unidas mediante una línea principal denominada backbone. Como máximo se podrán conseguir hasta 14400 dispositivos. Las áreas se conectan al backbone mediante acopladores.
Imagen 2. Topología de área bus EIB.
107

Telegramas
Los dispositivos se comunican mediante señales binarias en banda base con una velocidad de transmisión de 9600bps (en el caso de cable trenzado). Un cero lógico se representa mediante el flujo de corriente por el cable mientras que la ausencia de corriente significa un uno lógico.
Imagen 3. Señal digital de transmisión.
Al tener que compartir el medio físico de transmisión, un dispositivo comenzará a transmitir siempre y cuando el bus éste desocupado. Cuando dos o más dispositivos transmiten simultáneamente se produce una colisión en el bus que será resuelta mediante un algoritmo CSMA/CD (Carrier Sense Mulitple Access with Collision Avoidance). Los dispositivos se mantienen a la escucha mientras están transmitiendo. Tan pronto como detecten un cero cuando ellos estén transmitiendo un uno, se pararán dejando el bus libre para el dispositivo de mayor prioridad.
El intercambio de información entre dos dispositivos se consigue mediante el envío de telegramas. Un telegrama se compone de un paquete de datos estructurado que el emisor envía, y del correspondiente acuso de recibo con el que el receptor responde si no ha ocurrido ningún fallo. Cada paquete datos se divide en los siguientes campos:
• Control. (8 bits)
• Dirección del emisor. (16 bits)
• Dirección del destinatario. (16 bit +1 bit)
• Contador (3 bits)
• Longitud. (4 bits)
• LSDU (Link Service Data Unit): que es la información a ser transmitida (hasta 16x8 bits).
• Byte de comprobación. (8 bits)
Imagen 4. Estructura del telegrama.
El campo de control sirve para determinar la prioridad del mensaje, así como marca inicial del telegrama.
108

Tanto la dirección del emisor como la del receptor siguen el formato explicado en el apartado anterior, añadiendo un bit más en la dirección del destinatario que indica si se trata de una dirección física o de una dirección de grupo.
El contador se utiliza para funciones de enrutamiento, contando el número de saltos que ha dado el paquete. La longitud indica cuantos bytes ocupa la LSDU.
El último byte se utiliza para comprobar que los anteriores han sido transmitidos correctamente.
3. Java y RS‐232
Java es un potente lenguaje de programación orientado a objetos, que permite mediante sus librerías, entre otras cosas, manejar el puerto serie, comunicarse por red, desarrollar interfaces gráficos, etc.
En este proyecto se ha usado java como motor central, que se encarga de leer los usuarios y dispositivos de una base de datos, de recibir las peticiones de los clientes, de trasmitir estos datos hacia la BCU y viceversa, como se puede ver en la siguiente figura.
Imagen 5. Módulo principal desarrollado en java.
Para poder controlar el puerto serie utilizando Java se ha utilizado la clase javax.comm.SerialPort, que dispone de una serie de métodos y propiedades.
La comunicación que se establece con la BCU utiliza cuatro hilos de datos y uno de tierra: Tx, Rx, RTS, CTS y GND. Esta comunicación se realiza a una velocidad de 9600 bps, 8 bits de datos, sin paridad y un bit de parada.
Los métodos utilizados principalmente son:
• isCTS(): con el cual se obtiene el estado de la señal de CTS.
• isRTS(): con el cual se obtiene el estado de la señal RTS.
• notifyOnCTS(): permite lanzar un evento cuando la señal CTS cambia de valor.
• addEventListener(): permite lanzar eventos.
• setRTS(): con el cual se cambia el valor de la señal RTS.
109

• setSerialPortParams(): se usa para configurar inicialmente el puerto serie.
4. Ámbito de aplicación
Esta aplicación está especialmente enfocada a ser utilizada en un conjunto de viviendas que comparten una misma instalación domótica; como es el caso de residencias, hoteles, hospitales, etc. En este caso, solo el servidor tiene acceso directo al bus por medio de la BCU, de forma que los usuarios para poder controlar sus dispositivos tienen que hacerlo a través del servidor. Para poder comunicarse con el servidor, los usuarios hacen uso de una red local (intranet, wifi, bluetooth, etc.).
Las posibilidades y ventajas que ofrece la domótica, ya sea en el ámbito del hogar o para edificios enteros (hospitales, oficinas, hoteles, etc.), son muchísimas y muy variadas. Algunas de ellas son:
• Accesibilidad
• Ahorro energético
• Confort
• Seguridad
• Comunicación, etc.
Este proyecto, al ser de contenido libre y accesible a cualquier persona, puede ser estudiado, ampliado, mejorado o adaptado para utilizarlo junto con otros módulos complementarios para cualquier otro sistema basado en el estándar EIB, con la intención de administrar y controlar de una forma centralizada y fácil todo el sistema domótico.
5. Diseño
El desarrollo de este trabajo se puede dividir en dos secciones que se describen a continuación:
1. El módulo servidor, que recibe las peticiones de los distintos usuarios, bien desde la red local o desde Internet, y se las transmite al módulo encargado de la comunicación con el bus EIB. Además devuelve el resultado de dicha acción hacia los clientes.
2. El módulo de comunicación con el bus EIB, que es el que traduce las órdenes recibidas por parte del módulo servidor al protocolo de comunicación propio del estándar EIB (basado en telegramas), y seguidamente trasmite esta información hacia el bus EIB a través del puerto de comunicación serie RS‐232 (interfaz física entre ambos). También traduce la información recibida a través del bus EIB por parte de los distintos dispositivos (leyendo del puerto serie), para comunicarle al módulo servidor el estado del los distintos dispositivos.
Un ejemplo de cómo un usuario enciende una luz es el siguiente. El usuario ingresa su usuario y contraseña, las cuales el servidor las valida y le permite acceder al control de sus dispositivos. Luego el usuario enciende la luz, esta orden llega al servidor, el cual los trasmine hacia la BCU
110

con todo el protocolo extra necesario. Una vez que la luz se enciende, la BCU devuelve una trama de confirmación, la cual es leída por el servidor (del BCU al puerto serie). Finalmente la confirmación es enviada al usuario.
Todo esto sin dejar de lado que los usuarios siguen teniendo la opción de encender la luz de sus habitaciones mediante pulsadores conectados directamente al Bus EIB.
Imagen 6. Organización lógica del proceso de comunicación de datos entre los usuarios, el servidor y el bus EIB.
6. Desarrollo
La aplicación desarrollada, como se ha mencionado anteriormente, ha sido desarrollada en java, y para que su manipulación sea sencilla se ha implementado la interfaz gráfica que resume todas las órdenes que un administrador del sistema puede realizar. A continuación se muestran algunas pantallas y una breve descripción de cuando se usan.
Pantalla de inicio del servidor
A través de esta pantalla se inicia el servidor. Esta pantalla lanza un proceso que configura inicialmente el puerto serie del ordenador y manda las tramas iniciales de datos hacia la BCU, para que ésta se comunique correctamente con la CPU.
Imagen 7. Pantalla de inicio del servidor.
111

Pantallas de administración de los dispositivos
Esta aplicación para guardar todos los datos de los dispositivos posee una conexión con una base de datos, que en este caso es MySql. Para facilitar la administración de los dispositivos (nombre, identificador, grupo principal, grupo intermedio, subgrupo) se tienen las siguientes pantallas:
La siguiente figura muestra la pantalla de consultas. Aquí se muestra el estado de todos los dispositivos conectados al Bus EIB que se hayan introducido previamente.
Imagen 8. Pantalla de consulta de dispositivos.
En la siguiente figura se observa la pantalla que permite la manipulación del estado de los dispositivos.
Imagen 9. Pantalla de control de dispositivos.
Los datos de los dispositivos deben ser previamente guardados, para esto se utiliza la pantalla que se muestra:
112

Imagen 10. Pantalla para añadir dispositivos a la base de datos.
Pantallas de administración de usuarios
Ya que el ámbito de aplicación de este software abarca muchos usuarios, es necesario poder administrarlos, de forma que cada usuario sólo tenga permiso para acceder a sus propios dispositivos.
Por que se deben crean usuarios. En la figura siguiente se observa una consulta que se hace la base de datos de usuarios.
Imagen 11. Pantalla de consulta de usuarios.
La figura siguiente muestra la forma de dar de alta un usuario.
113

Imagen 12. Pantalla para añadir usuarios.
7. Resultados
Se ha logrado desarrollar una aplicación, con su correspondiente interfaz gráfico, que permite la comunicación de la CPU con el bus EIB por medio del puerto serie. Y con esta comunicación conseguimos interactuar sobre los distintos dispositivos que conforman el sistema (luces, persianas, etc.).
El servidor desarrollado tiene la capacidad de gestionar los usuarios y los dispositivos (consultando, añadiendo, eliminando, editando, etc.), de una forma sencilla mediante pantallas gráficas.
8. Conclusiones
Esta aplicación, al ser de código libre, es susceptible de ser mejorada o adaptada por cualquier desarrollador interesado.
Debido a que el servidor es configurable, esto permite que los usuarios tengan distintas formas de acceder a los dispositivos de su vivienda (vía web, wifi, móviles, etc.).
Al centralizar el sistema se consiguen reducir los gastos, ya que solo hay una BCU a la cual solo accede el servidor.
Referencias
[1] Fundación AUNA, “Tecnologías y actividades de estandarización para la interconexión de Home Networks; Anexo A: Descripción de tecnologías para telecontrol”, pp. 14‐21.
[2] http://odisea.ii.uam.es/esp/recursos/bus_eib.htm, “BUS EIB”.
[3] Wolfgang Kastner and Bernd Thallner, “A GPL Linux Device Driver for the EIB”
[4] European Installation Bus Association sc (EIBA), Técnica de proyectos en instalaciones con EIB; Principios básicos, Willy Muller Design, Alemania, 2000.
114

115
[5] European Installation Bus Association sc (EIBA), Técnica de proyectos en instalaciones con EIB; Aplicaciones, Willy Muller Design, Alemania, 2000.
[6] EIBA, “Volume 1: Primer; Part 2: Introduction to the System”, EIBA Handbook Series, 1999.
[7] EIBA, “Volume 2: Guide for development; Part 1: Cookbook; Chapter 2: EIB System Introduction”, EIBA Handbook Series, 1999.
[8] EIBA, “Volume 3: System Specifications; Part 6: Application Interfaces; Chapter 2: Physical External Interface”, EIBA Handbook Series, 1999.
[9] EIBA, “Volume 3: System Specifications; Part 6: Application Interfaces; Chapter 3: External Message Interface”, EIBA Handbook Series, 1999.
[10] EIBA, “Volume 3: System Specifications; Part 9: EIB.net”, EIBA Handbook Series, 1999.
[11] EIBA, “Volume 9: Standardized Components and Devices and Tests; Part 4: BCU’s and BIM’s; Chapter 3: BIM M112”, EIBA Handbook Series, 1999.
[12] EIBA, “Volume 9: Standardized Components and Devices and Tests; Part 4: BCU’s and BIM’s; Chapter 3: BCU1”, EIBA Handbook Series, 1999.

Silla de ruedas robótica para dar más independencia a su usuario
J. González, C. Galindo, J.A. Fernández, J.L. Blanco, A. Muñoz y V. Arévalo
Departamento de Ingeniería de Sistemas y Automática de la Universidad de Málaga
Resumen
En esta ponencia se presenta la silla robotizada SENA, que es el resultado de un proyecto de investigación desarrollado en el Dpto. de Ingeniería de Sistemas y Automática de la Universidad de Málaga. SENA se basa en una silla eléctrica comercial en la que se han integrado una serie de sensores y dispositivos que son gestionados mediante un ordenador portátil. Este prototipo se caracteriza por su capacidad para la navegación autónoma en interiores (oficinas, viviendas, centros comerciales, etc.), así como por su facilidad para interactuar y cooperar con el humano (integración Humano‐Robot). Estas capacidades están soportadas por una arquitectura software desarrollada específicamente para robots asistentes. Las posibilidades actuales de SENA se ilustran en esta ponencia con un caso típico de utilización de este prototipo en un entorno real.
1 INTRODUCCIÓN
Los últimos años han sido testigos de esperanzadores avances en la robótica de servicios y especialmente en el desarrollo de robots para la asistencia de personas discapacitadas. Se han desarrollado prototipos de sillas eléctricas que incluyen mecanismos para la evitación automática de obstáculos y navegación semi‐autónoma a lo largo de pasillos estrechos, puertas, etc. Estos mecanismos requieren que la silla esté dotada de sensores apropiados, gestionados y controlados mediante un ordenador a bordo. Así, la idea es convertir a las sillas eléctricas en sillas robóticas capaces de operar con un alto grado de autonomía.
Nuestro grupo de investigación viene trabajando durante los últimos años en el desarrollo de una silla robótica robusta y fiable con capacidad para la comunicación de alto nivel, persiguiendo el máximo grado de aceptación del usuario. Como resultado de este proyecto se ha construido el robot de asistencia SENA, ideado para mejorar la movilidad de personas con problemas motrices. SENA (ver imagen en la figura 1) está basada en una silla eléctrica convencional dotada de múltiple sensores y dispositivos gestionados por un ordenador portátil.
117

Figura 1. La silla eléctrica de navegación autónoma SENA. Este vehículo es el resultado de varios años de investigación en el Dpto. de Ingeniería de Sistemas y Automática de la
Universidad de Málaga.
Las características más destacables y diferenciadoras de SENA son:
• Fiabilidad e interacción con el usuario, gracias al uso de una arquitectura robótica de control especialmente diseñada para robots asistentes, denominada ACHRIN [6]. ACHRIN permite la participación activa del usuario a todos los niveles (desde el nivel deliberativo hasta el nivel de actuación física) lo que implica unos requerimientos de comunicación también a varios niveles. En la sección 2.2 se proporcionan más detalles sobre ACHRIN.
• Confort del usuario. Desafortunadamente, una persona discapacitada pasa casi todo el día en su silla, así que cualquier elemento adicional en el vehículo se puede convertir en una molestia en su vida diaria. En nuestro diseño hemos puesto especial atención a este aspecto situando todos los componentes de SENA fuera del espacio del trabajo del usuario. Además, la navegación autónoma de la silla se controla mediante un ordenador portátil que puede ser utilizado también para su trabajo diario.
• Modularidad. El diseño de un sistema robótico debería considerar futuras extensiones y actualizaciones. Por esta razón, tanto el software como el hardware de SENA usan productos comerciales estandares: conexiones genéricas (USB, firewire), middleware de comunicaciones (CORBA), y sistema operativo Windows. Esto facilita la actualización y extensión de los componentes.
118

La siguiente sección describe en detalle los componentes de hardware y software de SENA. La sección 3 describe algunas experiencias reales del uso de SENA demostrando su idoneidad para operar en una variedad de situaciones. Finalmente presentamos las conclusiones de este trabajo y algunas de las futuras mejoras de SENA.
2 DESCRIPCIÓN DE SENA
El hardware de SENA
La silla robótica SENA (ver figura 1) se ha construido sobre una silla eléctrica comercial (Sunrise Powertec F40) en la cual se han integrado diversos dispositivos y sensores para realizar eficazmente tareas de alto nivel en entornos interiores.
Los componentes hardware de SENA se muestran en el esquema de la figura 2. Es importante resaltar que la silla original ha sufrido mínimas modificaciones: se han conectado dos codificadores ópticos en los ejes de los motores para estimar la odometría de la silla y un voltímetro en las baterías originales. La señal del joystick ha sido puenteada mediante un controlador situado en la parte inferior del vehículo. Un conmutador, que se activa manualmente o mediante comandos verbales, selecciona la entrada al sistema motor del vehículo, pudiendo ser ésta la señal del joystick (operación manual de la silla) o del ordenador (control autónomo del vehículo). Este conmutador permite al usuario desconectar la navegación autónoma de SENA cuando lo desee para iniciar su guiado manual.
Figura 2. Esquema del hardware de SENA. El control de bajo nivel de los sensores y los motores es efectuado mediante varios microcontroladores que proporcionan un interfaz al software que se ejecuta en el portátil. Nuestro diseño proporciona gran flexibilidad, ya que el usuario puede estar trabajando en su ordenador personal al tiempo que éste se encarga
de guiar la silla.
Un sistema basado en microcontroladores a bordo de SENA opera como interfaz para todos los sensores y dispositivos, a la vez que implementa el control de bajo de nivel del vehículo. Por
119

otro lado, los algoritmos de alto nivel tales como planificación, localización, síntetis y reconocimiento de voz, etc., se ejecutan en el portátil, que se comunican con los microcontroladores a través de USB (ver figura 2).
A continuación se describen en detalle los diferentes sensores de los que dispone SENA:
• Una cámara CCD montada sobre una unidad motorizada con dos grados de libertad, utilizada para localizar a SENA. La cámara CCD se sitúa en una posición elevada, aproximadamente a 1.70 m., desde donde percibe elementos estáticos del entorno (paredes, ventanas, muebles, etc.).
• Un escáner láser radial de 180º montado sobre un mecanismo retráctil situado delante de la silla, entre las piernas del usuario, de modo que no le causa ningún tipo de molestia (ver figura 3). El empleo de este tipo de sensor está ampliamente extendido en robots móviles ya que proporciona alta precisión y un muestreo rápido del entorno. En nuestra aplicación, la información que proporciona el escáner láser se emplea para detectar obstáculos, para la construcción del mapa del entorno, y para localización ([2],[3],[7]).
Figura 3. El escáner láser radial proporciona información valiosa del entorno que permite a SENA evitar obstáculos, localizarse, crear mapas, etc. Su emplazamiento delante de la silla le
permite escanear la parte frontal sin molestar al usuario.
• Un anillo de trece sensores infrarrojos que se sitúan alrededor de SENA para detectar obstáculos cercanos cuando la silla esta maniobrando (ver figura 4). Los infrarrojos son sensores pequeños y baratos que proporcionan un rango operacional de 10 a 60 cm., permitiendo a la silla aproximarse de un modo seguro a objetos y muebles. Dos de ellos están situados en la parte inferior de la silla para detectar baches, bordillos, huecos de escalera, etc. Otros dos sensores infrarrojos están situados en la parte trasera para detectar situaciones peligrosas cuando la silla se mueve hacia atrás.
120

Figura 4. Porción del espacio escaneado por el anillo de sensores infrarrojos. Los sensores están situados en posiciones que complementan el espacio muestreado por el escáner láser
radial.
Como se ha comentado anteriormente, la selección y emplazamiento de los sensores de SENA están dirigidos a proporcionar tolerancia a fallos y operación robusta. Algunas tareas críticas como la evitación de obstáculos o la localización hacen uso de información redundante y complementaria proporcionada por varios sensores.
El vehículo también cuenta con dos pequeños altavoces y un set auricular‐micrófono bluetooth para la comunicación verbal con el usuario a través de un software comercial de síntesis y reconocimiento de voz. Esta comunicación verbal utiliza información simbólica del entorno [5], tal y como se comentará en la siguiente sección, proporcionando una comunicación de alto nivel similar a la humana [4].
Finalmente es importante destacar que todos los componentes hardware considerados para SENA usan conexiones estándar que nos permiten fácilmente actualizar, extender, o modificar, cuando sea necesario, la configuración de la silla con nuevos y más potentes dispositivos.
El software de SENA
Además del conjunto de sensores comentados en la sección anterior es necesaria una arquitectura software apropiada para interpretar la información sensorial y planificar las acciones más convenientes cuando se opera en entornos complejos.
Nuestra solución para superar la falta de capacidad autónoma de los actuales robots asistentes se basa en una arquitectura software que incluye al usuario de la silla de ruedas como un componente extra que puede ayudar al sistema cuando sea necesario. Es decir, suponiendo que el usuario tiene suficientes habilidades cognitivas (por ejemplo para corregir la posición del vehículo) y habilidades físicas (para por ejemplo manipular objetos, abrir una puerta o llamar a un ascensor), su destreza puede mejorar o extender la del sistema robótico.
Esta participación del humano en el sistema impone una estrecha interacción humano‐robot en la que la comunicación de alto nivel toma especial relevancia, ya que las personas que pueden extender la autonomía del robot (típicamente, el usuario o una persona de los
121

alrededores) prefieren comunicarse e interactuar con el robot del mismo modo que lo hacen con otras personas. Por ejemplo, cuando los sensores de la silla de ruedas detectan una puerta cerrada, el robot debería poder solicitar ayuda de una manera amigable para el humano, esto es, “por favor, ¿me abre alguien la puerta que está delante de nosotros?”. Es importante remarcar que esta ayuda se solicita solicitada sólo cuando es realmente imprescindible, sin molestar continuamente al usuario, que debe sentir que la silla opera de un modo autónomo.
Por lo tanto, se ha diseñado e implementado una arquitectura software que permite al humano interactuar en este sentido con la silla robótica. Esta arquitectura, denominada Arquitectura para la Integración Cognitiva Humano‐Robot ACHRIN (de los términos ingleses, Architecture for Cognitive Human‐Robot Integration) [6], integra al humano dentro del sistema robótico para que pueda aportar habilidades no soportadas por el robot (por ejemplo, llamar un ascensor) o soportada por el robot pero de un modo diferente y (quizás) más seguro (por ejemplo, maniobrar en situaciones complejas).
Figura 5. Visión general de ACHRIN. ACHRIN puede considerarse como una arquitectura robótica híbrida, sin embargo no presenta la disposición jerárquica típica ya que el modelo del mundo es accesible por la mayoría de sus componentes (una excepción es el Sistema de
Alerta).
ACHRIN (ver figura 5) es una arquitectura robótica híbrida [1] que permite la participación de un humano a todos los niveles, desde el nivel deliberativo al control de bajo nivel. Las características principales proporcionadas por ACHRIN son las siguientes:
• El humano y la silla se comunican mediante lenguaje común. A través de la integración cognitiva, el robot puede compartir parte del modelo simbólico que mantiene el humano de su entorno, y así, SENA y el usuario pueden referirse a los mismos conceptos espaciales (objetos, lugares, etc.) de forma inequívoca, usando sus nombres en un lenguaje común. Dicha integración cognitiva se logra a través del uso de un modelo jerárquico y simbólico [5] (ver figura 6).
122

Figura 6. Ejemplo de una jerarquía de abstracciones. (a) Plan esquemático de un entorno de oficinas. Los lugares de interés para el usuario de la silla aparecen marcados con círculos. (b)
Nivel básico de la jerarquía: mapa topológico de los lugares de interés. (c‐d) Niveles superiores de la jerarquía. Las regiones pintadas de gris contienen el conjunto de nodos que
son abstraídos en un mismo concepto espacial en el nivel superior. Cada concepto, por ejemplo una habitación, puede llevar asociado una o varias etiquetas lingüísticas para
mejorar la comunicación con el humano.
• El humano puede extender las habilidades de la silla. Estas habilidades van desde complejos movimientos de bajo nivel a toma de decisiones de alto nivel, por ejemplo abrir una puerta, advertir al sistema de situaciones de riesgo indetectables por los sensores del robot, planificar el camino más conveniente para llegar al destino, etc. Es destacable que no sólo el usuario de la silla puede extender las habilidades del sistema, sino cualquier persona de su entorno.
• El humano puede mejorar algunas habilidades de la silla. El humano puede realizar las acciones asignadas inicialmente a la silla, por ejemplo el guiado hasta un punto determinado. De la misma forma, el usuario o cualquier persona del entorno puede
123

completar acciones encomendadas a la silla que ocasionalmente hayan fallado. Por ejemplo, el usuario puede recuperar al vehículo de un fallo de navegación guiando manualmente a localizaciones bien conocidas donde éste podría continuar navegando autónomamente.
Los módulos de ACHRIN tienen en cuenta las capacidades humanas a través de las llamadas unidad de habilidad. Cada módulo de la arquitectura se puede componer de diversas unidades de habilidad que ejecutan una cierta acción, como producir un plan, comprobar situaciones arriesgadas, moverse entre dos localizaciones, etc. Tales acciones pueden ser resueltas bien por el humano o por el vehículo, seleccionando las correspondientes unidades de habilidad. En el caso del robot, las unidades de habilidad son implementadas mediante algoritmos software, mientras que en el caso del humano permiten realizar y comunicar acciones a través de los interfaces adecuados, por ejemplo mediante comandos de voz [6].
3. EXPERIENCIAS CON SENA
En los últimos años se han realizado múltiples demostraciones y apariciones en televisión (algunas de ellas en programas emitidos en directo) poniendo de manifiesto la utilidad de nuestro prototipo como robot asistente a la movilidad de personas discapacitadas (ver figura 7).
Figura 7. Algunas de las demostraciones llevadas a cabo con SENA. Nuestra silla de ruedas ha sido utilizada en una variedad de situaciones y con diferentes personas (algunas de ellas en
programas de televisión emitidos en directo).
A continuación se describe un escenario típico que ilustra la utilidad y prestaciones del prototipo SENA. Supongamos que un usuario de SENA que trabaja en un entorno de oficina
124

típico, envía un documento a una impresora remota y quiere ir a la habitación donde la impresora está situada para recoger su copia. Este simple ejemplo puede presentar dificultades complejas como, por ejemplo, qué hacer si la puerta de la habitación está cerrada o el sistema de navegación de SENA falla debido a la dificultad de maniobrar dentro de la habitación. Para el primer problema, la ayuda del humano es inevitable ya que SENA no es capaz de abrir puertas. En este caso, el sistema de planificación de ACHRIN advierte de la necesidad de participación del humano en el plan, que es solicitada y aceptada a través de los comandos verbales mostrados en la tabla de la figura 8. Para el segundo problema, presente en cualquier aplicación robótica real, el usuario puede detectar que la navegación automática falla y notificar al control de SENA que necesita del usuario para solventar manualmente esta situación14.
La figura 8 muestra algunas instantáneas de un usuario desenvolviéndose en este escenario. Un video de este experimento, y de algunos otros experimentos, puede ser descargado desde http://www.isa.uma.es/research/sena.
Figure 8. Integración SENA‐humano. Cuando SENA opera dentro de un escenario complejo y dinámico, la ayuda del humano puede ser necesaria para resolver situaciones complejas (b,d). En este sentido, SENA y el usuario cooperan: el vehículo proporciona movilidad al
usuario mientras él/ella suple las limitaciones de la silla de ruedas.
En la figura 9 se muestra un listado de comandos/respuestas disponibles para la comunicación verbal entre la silla y el usuario.
14 Las capacidades de navegación de bajo nivel empleadas en SENA no son abordadas en este artículo, pero pueden ser encontradas en [2].
125

Figure 9. Comunicación verbal entre el usuario y el robot asistente SENA. Con el objetivo de mejorar la comunicación, esta gramática se ha extendido con variaciones de los comandos.
Así por ejemplo, “Vamos a <nombre de lugar>” es reconocido como una variante del comando (7).
Las posibilidades de una silla de ruedas robótica no se limitan al desplazamiento sino que, el hecho de contar con un computador a bordo conectado mediante un sistema inalámbrico (wi‐fi o similar) a otros equipos y dispositivos conllevaría una serie de ventajas adicionales. En concreto, se posibilita que el usuario tenga al alcance de la mano actuaciones domóticas (encendido de electrodomésticos, accionamiento de persianas, encendido de luces, llamadas al ascensor, etc.), así como conexiones a Internet (compras, reserva de entradas, llamadas por teléfono, consultas médicas, etc.).
4 CONCLUSIONES Y TRABAJO FUTURO
En este artículo hemos presentado el robot asistente SENA, una silla eléctrica de navegación autónoma destinada a facilitar la movilidad a personas discapacitadas y personas ancianas. Tras años de investigación y sin que el trabajo pueda considerarse concluido, nuestro grupo ha desarrollado un prototipo razonablemente robusto y eficaz que proporciona a las personas la posibilidad de operar en el interior de edificios más o menos complejos y extensos, como un hospital, geriátrico, centros de enseñanza, edificios públicos, aeropuertos, estaciones de autobuses y trenes, etc.
El futuro de nuestra investigación va en la línea de mejorar y extender la funcionalidad del hardware/software de SENA, así como llevar a cabo una experiencia piloto real que nos permita testar su funcionamiento y utilidad en situaciones completamente reales.
126

127
Agradecimientos
Los autores desean agradecer el inestimable esfuerzo y dedicación de un gran número de investigadores, alumnos y doctorandos que han trabajado en el desarrollo de SENA. Este trabajo ha sido subvencionado por el Ministerio de Educación, mediante los proyectos de investigación CICYT‐DPI2005‐01391 y CICYT‐DPI2002‐01319.
Bibliografía
[1] Arkin, R.C., E.M. Riseman and A.Hansen (1987). Aura: An architecture for vision‐based robot navigation. In: DARPA Image Understanding Workshop, Los Angeles, CA}. pp. 417‐431.
[2] Blanco, J.L., J.Gonzalez and J.A. Fernández‐Madrigal (2006). The trajectory parameter space (tp‐space): A new space representation for non‐holonomic mobile robot reactive navigation. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Beijing (China).
[3] Blanco, J.L., J.A. Fernández‐Madrigal and J.Gonzalez (2006). An entropy‐based measurement of certainty in rao‐blackwellized particle filter mapping. In: Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Beijing (China).
[4] Fernández‐Madrigal, J.A. and J.Gonzalez (2000). Multi‐Hierarchical Representation of Large‐Scale Space. Kluwer Academic Publishers.
[5] Fernández‐Madrigal, J.A., C.Galindo and J.Gonzalez (2004). Assistive navigation using a hierarchical model of the environment. Integrated Computer‐Aided Engineering (4), 309‐322.
[6] Galindo, C., J.Gonzalez and J.A. Fernández‐Madrigal (2006). A control architecture for human‐robot integration: Application to a robotic wheelchair. IEEE Transaction on Systems, Man, and Cybernetics‐Part B (5),1053‐1067.
[7] Reina A. and J.Gonzalez (2000). A two‐stage mobile robot localization method by overlapping segment‐based maps. Robotics and Autonomous Systems. Elsevier Science.

Estudio sobre teléfonos parlantes. Entendimiento del mercado para usuarios ciegos y deficientes visuales
D. Sadek Wynberg Millward Brown Equipo de Vodafone
Michael FawknerCorbett y Nagia El Emary (VFGROUP). Coordinado en España por José Manuel Azorín (VFE)
INFORMACIÓN PRELIMINAR. OBJETIVOS. MÉTODO Y MUESTRA
Información preliminar sobre el proyecto
• Se ha descubierto que aproximadamente el 10% de la población adulta está excluida de los servicios básicos de la telefonía móvil, debido en parte a la complejidad de los teléfonos. De este grupo, al menos el 20% tiene una discapacidad visual severa.
• Vodafone está decidida a eliminar esta barrera de acceso mediante el desarrollo de dispositivos que supondrán un cambio en la accesibilidad a teléfonos al tiempo que demostrarán su compromiso con la responsabilidad social.
• De acuerdo con este objetivo, se ha desarrollado un teléfono parlante para personas con discapacidad visual que está ya comercializado en diversos mercados de Vodafone, incluidos el Reino Unido y España, junto a otros mercados próximamente. Vodafone España ha comercializado Mobile Accessibility y Mobile Speak, de Codefactory, que son revisores de pantalla en competencia con TALKS, con una funcionalidad similar.
• A pesar de que la telefonía parlante ha contado con una cobertura publicitaria y un apoyo de los usuarios positivos, se considera que los canales de ventas y de atención ha resultado menos efectivos que lo que debieran. Además, debido a que la promoción de la telefonía móvil ha sido limitado, el reconocimiento del producto sigue siendo bajo.
• Por ello, era necesario realizar un estudio para mejorar el entendimiento del mercado para usuarios ciegos y deficientes visuales.
• Con los resultados obtenidos, Vodafone quiere:
o Apoyar decisiones estratégicas sobre el suministro futuro de productos para este mercado.
o Compartir con las compañías operadoras y asegurar que los lanzamientos de teléfonos parlantes están dirigidos de forma efectiva y eficaz.
o Informar sobre el borrador del Documento de Estrategia de Teléfonos Parlantes.
129

Objetivos del estudio
• El objetivo fundamental de este estudio era comprender cómo las personas ciegas o deficientes visuales afrontan y adquieren nuevas tecnologías y, en concreto, teléfonos móviles.
• Los objetivos específicos analizaban:
o Si existe una demanda de productos específicos (en cuanto a conductores de la demanda más que a un nivel empírico de demanda).
o Dónde consiguen los discapacitados visuales información sobre nuevas tecnologías.
o Experiencia en la compra de tecnología.
o Experiencia en la obtención de información, compra y soporte actual (entre clientes quienes han utilizado/comprado conversores de texto a voz).
Preguntas del estudio
Se formularon un número de preguntas específicas relativas a la tecnología y los teléfonos móviles, que se reproducen a continuación, aunque se trataron de acuerdo con una metodología cualitativa:
Tecnología en general
1. ¿Qué tecnología utiliza habitualmente? (PC/TV/Radio, teléfono móvil/fijo/equipo Hi‐Fi…).
2. ¿Utiliza tecnologías asistida/específica? (en caso afirmativo, Revisores de pantalla para PC, GPS y PDA con salida parlante, etc.)
3. ¿Dónde encuentra información sobre tecnologías convencionales?
4. ¿Dónde encuentra información sobre tecnología especializada/asistida/adaptada?
5. ¿Accede a Internet? En caso afirmativo, ¿desde dónde? (casa, cibercafé, trabajo, etc.)
6. ¿Utilizan un revisor de pantallas?. En caso afirmativo, ¿cuál?
7. ¿Cuál resulta su dispositivo tecnológico favorito/más importante/útil?
Telefonía móvil
1. ¿Tienen teléfono móvil? ¿Qué modelo?
2. ¿Qué funcionalidad utiliza en su móvil? (Voz, SMS, MMS, WAP, acceso a Internet, correo electrónico, videollamada).
3. ¿Utilizan tecnologías de apoyo con su teléfono móvil? En caso afirmativo, ¿cuál? (software de conversión de texto a voz, ampliación, salida/entrada braille).
130

4. ¿Dónde se informaron sobre el producto?
5. ¿Dónde adquirieron la tecnología? (operadores especializados, en línea…).
6. En caso de software, ¿tenía el dispositivo ya instalado el software o se realizó posteriormente?
7. Si fue posteriormente, ¿realizaron ellos mismos la instalación, o la realizaron amigos, familiares o en algún establecimiento especializado?
8. ¿Cuánto abonaron por el teléfono y el software? (distinguiendo entre teléfono y software, si es posible).
9. ¿El teléfono es con tarjeta prepago o con contrato?
10. ¿Quién es el proveedor/operador de su teléfono móvil?
11. ¿Cuál es la funcionalidad más importante en su teléfono móvil?
12. ¿Qué funciones en su teléfono resultan inaccesibles en la actualidad?
13. ¿Cuál es la principal prestación que les gustaría incorporar en su teléfono móvil?
14. ¿En dónde esperarían encontrar información sobre productos específicos? (Operadores, fabricantes de teléfonos, tiendas, asociaciones (por ejemplo RNIB, u organizaciones más locales), oftalmólogos, etc.)
15. ¿Cómo valorarían su experiencia a la hora de comprar su teléfono móvil y software?
16. ¿Cómo valoran la experiencia de utilizar su producto especializado?
17. ¿Han recibido suficiente apoyo sobre el producto y en el momento adecuado cuando lo han solicitado?
18. ¿Les gustaría realizar algún comentario adicional sobre la accesibilidad de la tecnología?
Método y muestra
• Tanto en España (Madrid) como en el Reino Unido (Londres y alrededores de Manchester):
- 2 Debates en grupos reducidos
- Cada uno de ellos con 5‐6 encuestados
- 2 horas de duración
- Realizada en un entorno muy “visual”
- 6 entrevistas en profundidad
131

- Cada una con una duración de 1 hora
- Realizadas en casa (en el Reino Unido) y en un Centro de Investigación (en Madrid).
• Requisitos para la participación:
- Hombre y mujer, entre 20 y 40 años
- Incluyendo ciegos totales y deficientes visuales
- Incluyendo aquéllas personas discapacitadas visuales de nacimiento/o desde la etapa infantil, y aquéllas que pierden la vista de adultos.
- Mínimo de dos personas por grupo han de ser usuarios de tecnología asistida/ específica (Revisor de pantallas para PC, PDA con voz, etc.)
- Todos los participantes han de mostrarse elocuentes y seguros al hablar en una discusión en grupo.
OBSERVACIONES GENERALES SOBRE LA MUESTRA
• Los dos temas principales que surgen en común (a través de los grupos objetivos en el Reino Unido y en España) con un impacto en la reacción y respuesta de las nuevas tecnologías son:
- Firme deseo de no tener que depender de las personas videntes a su alrededor.
- Igualmente, firme deseo de no llamar la atención por su deficiencia visual (en otras palabras, de integración en cualquier faceta convencional).
• Fueron evidentes la conciencia y franqueza ante nuevas tecnologías (en ambos mercados)
Un interés que, en ocasiones, había surgido como resultado directo de la pérdida de la visión.
Nuevas tecnologías que tuvieron un acogida especialmente buenas entre estudiantes / empleados de oficina / personas solteras (mayor disponibilidad para acceder a la tecnología día a día/ingresos disponibles).
De hecho, la mayoría consideran la tecnología como una importantísima ayuda sin la que no habría posibilidad de integrarse en la forma de vida cotidiana.
• En nuestra muestra también se incluye a un número reducido de personas cuya familiaridad, confianza o demanda de nuevas tecnologías asistidas estaban considerablemente menos pronunciadas (mayor edad / sin actividad laboral / casados)
132

• Dicho esto, la mayoría coincidieron en que la disponibilidad de tecnología especializada/adaptada quedaba por detrás de la disponible en el mercado convencional para personas sin discapacidad visual:
- A pesar de que piensan que la capacidad tecnológica está ahí, carece de una fuerza motriz que la respalde.
- Se considera que las adaptaciones a la tecnología convencional no prosperaban lo suficiente.
- Los cajeros automáticos tienen pantallas grandes, por ejemplo, pero no cuentan con el suficiente contraste ni un tipo de letra suficientemente grande, ni los medios necesarios para distinguir fácilmente la ranura adecuada para introducir la tarjeta.
• Incluso entre aquéllos con actividad laboral, este sector del mercado no se caracterizaba por su abundancia: ‐ restricciones en el presupuesto y alto coste de la tecnología especializada hacen que la mayoría de los dispositivos estén fuera de su alcance.
PRINCIPALES RESULTADOS DEL ESTUDIO
1. Tecnología
Experiencia con la tecnología en general
• Cada persona utilizaba una amplia gama de dispositivos tecnológicos generales no especializados en el hogar:
o Radio, teléfono fijo y móvil, TV, equipo Hi‐Fi, reproductores de libros parlantes, etc.
o Una televisión con pantalla grande posibilita que algunas personas con discapacidad visual puedan ver TV.
- Curiosamente, la gente conocía más sobre la disponibilidad de señalización/subtítulos para personas con discapacidad auditiva que sobre un servicio equivalente para las personas ciegas (como AudioDescripción).
- Quienes tenían conocimiento de la Audio Descripción fueron algo más críticos con la limitada selección de programas/producciones en las que estaba disponible (se trata más de un gesto simbólico que de proporcionarles auténtica accesibilidad).
• Sin excepción en la muestra, se realizó una selección de electrodomésticos entre los que están disponibles al público en general, pero con especial atención a los detalles que hacen que se ajusten a sus necesidades.
• De hecho, la mayoría preferían elegir dispositivos estándar en lugar de específicos – incluso si esto suponía que no se iba a hacer uso de la total funcionalidad del equipo.
133

o Por ejemplo, elegir un microondas sencillo, básico con relación a uno parlante, y optar por paneles de control que están diseñados con botones en lugar de pantallas o selectores LCD.
o Adhesivos en braille (puntos en relieve de color naranja), que constituyen una inestimable aportación a la hora de marcar determinados ajustes.
• La preferencia sobre tecnología estándar frente de la adaptada respondía a un claro deseo de tener un hogar “con la apariencia de normal” en la medida de lo posible,
1. Que tenga en cuenta a sus niños, cónyuges, visitas/huéspedes videntes.
2. Nadie quiere que su discapacidad visual domine sus vidas y relaciones con otras personas.
• Además, siempre estaba en la mente la evidente carestía de los electrodomésticos especializados en comparación con productos estándares equivalentes hacía que se descartaran de antemano como una opción.
• Varias personas, aunque no todas, tenían un PC con acceso a Internet en su casa:
o Prácticamente todas ellas aseguraron que tenían previsto adquirirlo pero, en cualquier caso, consideraban que podrían tener acceso a Internet si así lo precisaban.
o La biblioteca municipal, colegio, la organización de ciegos, un cibercafé (en el caso de una o dos personas) estaban siendo utilizados para tener acceso a un PC con conexión a Internet y con un revisor de pantallas y ampliador de caracteres.
Experiencia con tecnología especializada/asistida.
• En realidad todo el mundo tenían experiencia, o conocían, con revisores de pantallas o programas de ampliación de caracteres para PC.
o Los primeros contactos habían tenido lugar en las asociaciones, o como estudiantes, o en cursos de formación recomendados por organizaciones para ciegos.
o En estos ámbitos se hizo referencia al programa de ampliación de caracteres.
• JAWS resultó ser el revisor de pantallas para PC más conocido (tanto en España como en el Reino Unido) y en general se consideró como el mejor (aunque, más que gustar, se tolere su voz sintética).
• A pesar de tener la impresión de que el software de revisión de pantallas cada vez resulta más potente, los gráficos todavía representan un problema:
o La naturaleza compleja, con una orientación gráfica, de muchos portales – que no habían sido evidentemente diseñados teniendo en cuenta a las personas con deficiencia visual – a menudo supone que la página resulte inaccesible.
o Aunque algunos de estos portales estaban mejor que otros (por ejemplo, bancos).
134

o La página Web de Vodafone no obtuvo una puntuación especialmente alta desde una perspectiva de discapacidad visual.
• Los escáneres son dispositivos que a menudo se utilizan como tecnología asistida para personas con resto visual:
o Aunque no se pueden considerar como una novedad, son un dispositivo sencillo, apropiado y útil a la hora de facilitar la vida cotidiana.
o El valor principal reside en que permite la lectura del correo de forma confidencial e inmediata.
• Las PDAs con salida parlante no eran habituales en nuestra muestra.
o Aunque se consideran una potente herramienta de organización personal además de sus prestaciones en GPS.
o Ambas funciones resultaban especialmente relevantes en la actividad cotidiana de las personas ciegas.
• Una o dos personas se mostraron interesadas en un dispositivo SMART (para correo electrónico) aunque su precio les desanimó, además de cierta resistencia inicial a un teclado Qwerty.
• Entre las tecnologías más ampliamente disponibles en la actualidad, la informática está ampliamente reconocida como fundamental por su contribución a mejorar las vidas de las personas ciegas y deficientes visuales, además de ser un instrumento vital en su independencia.
• Para muchos, el acceso a Internet en el PC con un revisor de pantallas (o ampliador de textos) es el único aspecto más importante:
o Posibilita el acceso al mundo laboral (sólo hace pocos años no se podía acceder).
o Como herramienta de integración social y de comunicación (a través de correo electrónico, chats, foros, llamadas (skype).
o Como la herramienta más potente que existe para acceder a la información, especialmente aquélla que resulta específica para sus necesidades, sin el reto de la geografía.
o Como una fórmula para mejorar nuestras actividades diarias: Comprar (prácticamente de todo, pudiendo realizar las compras de Navidad en horas en las que las tiendas no son accesibles); gestionar sus propias cuentas y asuntos del hogar (por ejemplo, facturas electrónicas en sustitución del documento tradicional en papel)…
135

Móviles – uso y experiencia
• Incluso sin tecnología asistida, los móviles desempeñan un papel fundamental en la vida diaria.
o Como un medio de ser independiente.
o Como una forma de garantizar la seguridad y tranquilidad (por ejemplo, cuando uno se pierde).
o Como una herramienta de comunicación, que permite acceder a la vida social y laboral.
o Como una fórmula para crear un sentimiento de integración en la cultura social convencional.
• Dicho esto, el uso actual del móvil cuando se esta fue moderado por precaución.
o La necesidad de concentrarse en dónde vamos hace que caminar y hablar resulten muy difícil.
o El miedo a la vulnerabilidad al robo del móvil cuando se utiliza públicamente (esto ocurre más en el Reino Unido).
• Como resultado, aunque se lleve, el móvil puede que permanezca desconectado.
• En casa, se manifestó una clara preferencia por el uso de la línea fija.
o Esto se basa fundamentalmente en la costumbre, aunque está perpetuado por la percepción de que el coste de las llamadas desde móvil es más elevado.
• Al margen del uso predominante del móvil para realizar llamadas con voz, otras funcionalidades que se utilizan son la agenda y el grabador de voz.
o La función de marcación rápida resultó más útil que la activación por voz (que fue especialmente difícil de utilizar con ruidos de fondo).
o Para ayudar a identificar las llamadas entrantes, en ocasiones se asignaban tonos diferentes.
o La posibilidad de grabar breves mensajes recordatorios con voz a menudo resultaba inapreciable debido a la dificultad de tomar notas/recordatorios por escrito.
• El uso de SMS dependía considerablemente del nivel de discapacidad visual de la persona.
o La inaccesibilidad a este servicio constituía a menudo un motivo de enfado, que se exacerbaba al recibir mensajes SMS (a pesar de haber indicado a las personas que dejaran mensajes de voz en lugar de enviar SMS).
136

o No resultaba poco común tener que pedir a personas extrañas que leyeran el nombre del remitente e incluso su contenido.
• También se consideraba conveniente tener acceso a la alarma y al calendario, aunque dependiendo de la visión.
• En parte, y debido a la importancia de oír el ruido de ambiente, el uso de auriculares no era muy popular. Por lo tanto, las funciones de radio o MP3 (si se encuentran disponibles) no se utilizaban demasiado.
• Generalmente, WAP y acceso a Internet quedaban descartados por resultar demasiado lentos y costosos (aunque algunos se descargaran tonos de llamadas).
• Resulta interesante que la función de cámara fuera un elemento a menudo valorado (no por MMS sino por mostrar fotos a personas videntes – para compartir experiencias de vacaciones, vida familiar, etc – o para personalizar la pantalla principal.
• Todos son conscientes de que no estaban utilizando todas las funcionalidades de sus móviles:
o A pesar de que a menudo sabían que no tenían necesidad de utilizar todas sus prestaciones, existía un cierto resentimiento de estar limitado – de forma injusta – en el acceso a funciones del menú debido a su discapacidad. Especialmente, a las funciones estándares.
Productos móviles especializados
• Durante nuestra muestra (tanto en España como en el Reino Unido), se mostró muy poco interés en la idea de dispositivos especializados, diseñados exclusivamente para personas ciegas (tales como aquéllos con salida/entrada en Braille, o que no tienen pantalla),
o Incluso para aquellos usuarios ciegos para los que la pantalla era esencialmente superflua.
• A pesar de que existía la creencia de que estos productos tienen precios prohibitivos, la inquietud fundamental se refería al deseo de “encajar” con las personas videntes.
o Existía un claro rechazo a utilizar cualquier cosa que indique que son “diferentes”.
• También importante resultaba el hecho de que nadie quisiera un dispositivo que otra persona (vidente) no pudiera utilizar.
137

FUENTES DE INFORMACIÓN, CANALES DE COMPRA Y EXPERIENCIA
Fuentes de información y Canales de Compra.
Tecnología general, incluyendo los móviles.
• A la hora de elegir y de adquirir tecnología en general, incluidos los móviles, se tiende a utilizar los canales tradicionales:
o Grandes almacenes (tales como “El Corte Inglés”, o establecimientos especializados en electrónica (como Comet), que ofrecen una amplia selección por si sólo como para no tener que ir de tienda en tienda.
o Tiendas de telefonía (como Carphone Warehouse o similares), o tiendas propias de operadores (Movistar, Vodafone, etc).
• Mientras que han de ir acompañados por personas videntes en sus visitas a comercios (minoristas), muestran mayor confianza hacia los vendedores de grandes almacenes, a los que consideran como principal fuente de información y asesoramiento sobre sus productos. Sin embargo, a menudo consideraban que éstos carecían de:
o Conocimiento detallado de los productos que estaban vendiendo así como de mayor conciencia de las necesidades de este grupo minoritario.
o Por tanto, a menudo no podían facilitar las recomendaciones adecuadas.
• Los establecimientos propios de los operadores tendían a facilitar información más precisa que otras tiendas. Aunque hubo algunas experiencias positivas, ninguno de los operadores destacaron particularmente en cuanto al servicio.
Tecnología adaptada/asistida.
• Evidentemente, las asociaciones desempeñan un papel fundamental dentro de la comunidad de ciegos y deficientes visuales, en cuanto a:
o Favorecer la concienciación de tecnologías innovadoras y relevantes, y como una fuente de información complementaria, ayuda y asesoramiento.
o Como una tienda.
o Como un medio que ofrece la oportunidad de prestar/descargar demos de nuevos productos.
o Facilita apoyo sobre financiación.
o Como un foro para la red y el boca a boca.
o Como promotor / defensor de una solución tras otra. Sin embargo, en ocasiones podrían considerarse que están condicionados por sus propios intereses comerciales.
138

• Muchos hacen un uso considerable de internet, que supone una importante fuente de información alternativa y asesoramiento a través del proceso de toma de decisiones.
• A pesar del papel de Internet, no encontramos a nadie que hubiera realizado compras por este medio (prefieren realizar los trámites en una tienda).
• Muy de vez en cuando, las personas tenían conocimiento de novedades tecnológicas a través de programas de radio de actualidad sobre discapacidad (por ejemplo, “In Touch”, en Radio 4 – Reino Unido).
Teléfonos parlantes / Programas de conversión de texto a voz
• A pesar de que la mayoría de nuestra muestra no utilizaba teléfonos móviles con software de conversión, existía una concienciación a través de:
o “Lanzamientos” realizados a través de organizaciones de ciegos: RNIB y Henshaws (Reino Unido) y ONCE (España): con demostraciones, notas informativas, empleados que lo utilizan, sus páginas web. Se mencionó que la de Henshaw había sido visitada por algún empleado de la sede central de Vodafone para promocionar el prelanzamiento de un producto.
o Boca a boca: Por parte de conocidos de una persona deficiente visual, y también – de vez en cuando – en chats relacionados con temas de ceguera, tablones de anuncios en línea, etc.
o Encontrarse con una persona que utiliza ese dispositivo: en los grupos, los usuarios resultaron ser defensores convincentes y de influencia.
o Todos los informes apoyaban el dispositivo y habían generado interés.
o Sin embargo, evidentemente no todo el mundo había tenido conocimiento del producto antes de la investigación: coincide con aquellas personas con una relación menos regular o activa con una organización de ciegos.
Experiencia en la compra de un teléfono parlante de Vodafone
• Una valoración de los intentos de las personas por obtener más información sobre los teléfonos parlantes y su compra, puso de manifiesto algunos puntos flacos en el proceso: Parece que la experiencia se ha caracterizado más como elemento de frustración que de reconocimiento (Nota: en una pequeña representación).
• Más allá de lo que se encontraba disponible en sus organizaciones, se buscó mayor información y asesoramiento de Vodafone a través de los tres canales de cara al cliente: en establecimientos autorizados, a través del servicio de atención telefónica y a través de la página web.
• La página web de Vodafone había sido visitada de forma regular para obtener mayor información sobre productos específicos de telefonía parlante y mantenerse al día de los últimos desarrollos en telefonía móvil que hayan tenido en cuenta su discapacidad. Sin
139

embargo, una o dos personas comentaron que la información sobre teléfonos parlantes en la web no parecería haber sido actualizada.
• Se consideraba que se tenía un conocimiento insuficiente sobre telefonía parlante. Un comprador (en el Reino Unido) lo describió como “inconsistente e impreciso”. Por ejemplo, en lo referente a qué teléfonos son compatibles con el software – se compró un equipo según la información facilitada que resultó ser incompatible.
• La instalación del programa no había estado exenta de problemas: Había tenido que ser reinstalado por una persona; había precisado varios viajes a la tienda autorizada; la instalación por parte de CIDAT (centro de I+D de ONCE) resultó ser un proceso excesivamente prolongado, con un duración de entre 7‐10 días.
• En España se tenía la impresión de que los compradores no eran dueños del acuerdo de uso de licencia para el programa: Se dio a entender que un teléfono nuevo/mejorado precisaba la recompra de un programa de conversión de texto‐voz. Sin embargo, esto ha resultado ser una confusión creada por algunos usuarios en los grupos que estaban utilizando una demo de teléfonos parlantes que se habían descargado (recargándola mediante la constante conexión y desconexión del teléfono).
Respuesta a los teléfonos parlantes de Vodafone
Teléfonos parlantes de Vodafone
• La reacción a los dos teléfonos parlantes a los que se les había instalado el software de conversión de texto a voz fue valorada en esta investigación:
Nokia N70 + TALKS (en ambos mercados)
Nokia 3660 + TALKS (Reino Unido) y + Mobile Accessibility (España).
Respuesta al diseño del teléfono Nokia N70.
• Tanto en España como en el Reino Unido, el N70 tuvo una aceptación más positiva en cuanto a estética, tanto por si mismo como en comparación con el 3660.
• Sin embargo, se consideraba que el teclado no había sido diseñado teniendo en cuenta al colectivo de personas con discapacidad visual.
• Elementos positivos:
o Modelo más innovador, con un diseño más moderno (nítido y nada recargado).
o Equilibrio proporcionado entre el teclado y la pantalla.
o Pantalla con un tamaño generoso para las personas con resto visual.
o Tamaño (en general) más reducido en relación con el 3660.
o Para los usuarios de teléfonos de mesa, todavía se consideraba bastante voluminoso.
140

o Gustó el protector (obturador) de la cámara (novedoso y práctico).
• Elementos negativos:
o Definición/separación insuficientes entre las teclas bastante pequeñas. Además, el 5 no se localiza fácilmente.
o (Las numerosas) teclas de funciones están demasiado juntas del teclado numérico.
o Se han observado algunas dificultades iniciales al pulsar el botón de “encendido” y la tapa de la tarjeta SIM.
Respuesta al diseño del teléfono Nokia 3660.
• La respuesta menos positiva hacia el 3360 se debió, en parte, al hecho de que se considerara un modelo más antiguo (algunos encuestados tenían este teléfono).
• A pesar de tener una ergonomía bastante incómoda, se pensó que era un modelo de fácil manejo.
• Elementos positivos:
o Clara separación entre las teclas.
o Disposición sencilla de las teclas de funciones.
• Elementos negativos:
o Voluminoso, pesado e incómodo en las manos.
o Los usuarios ciegos comentaron que su pantalla era excesivamente grande (quienes no tienen ninguna necesidad de pantalla).
o El teléfono estaba en el mercado desde hace algún tiempo/obsoleto.
o No tiene marca en la tecla del 5.
Respuesta a los productos de conversión de texto a voz
• Tal y como se estableció antes de presentarles el teléfono parlante (Speaking Phone), ya se había despertado cierto interés al margen del estudio realizado.
• La familiaridad con los revisores de pantallas para PC garantizó que la mayoría de las personas tuviera, por lo menos, un cierto entendimiento de que se trataba de un teléfono móvil que incorporaba un programa que verbalizaba la información que aparecía en la pantalla.
• La voz a menudo se identificaba, de manera instantánea, como la de Jaws y esto contribuía a dar cierta garantía. Sin embargo, quienes descubrían por primera vez este dispositivo podían sentirse bastante intimidados y con dificultades para entenderlo.
141

• Al margen de algunas dificultades iniciales con la navegación y a la hora de acceder a la demo, se obtuvo una respuesta muy positiva (estaban entusiasmados ante las posibilidades de tener mayor accesibilidad a todas las funcionalidades del teléfono).
• La variedad de funciones y la posibilidad de adaptarlo a las necesidades personales (ajustando la velocidad y el volumen de la voz, deletreo de palabras que resultan difíciles de “escuchar”, etc).
• En España, TALKS tenía una preferencia mayor con respecto a Mobile Accesibility:
o Se consideraba que TALKS era superior que MA, con mayor aceptación en el Reino Unido y en USA.
o Mobile Accesibility obtenía una menor valoración y se consideraba que tenía una funcionalidad limitada.
• Mobile Speak también fue mencionado en el contexto de los productos de conversión de texto a voz. Se trata de un producto popular en España y se considera que se actualiza con mayor frecuencia y que incorpora funciones adicionales tales como el identificador de colores.
NOTA IMPORTANTE: En ambos modelos, la lentitud en el proceso de carga y la falta de una señal inmediata que avise cuando el dispositivo está encendido fueron motivos de consternación.
CONCLUSIONES
• Existe un evidente llamamiento para un dispositivo totalmente inclusivo que ofrezca conversión de texto a voz, reconocimiento de voz y ampliación.
• Vodafone cuenta con una buena posición como para fomentar su reputación como un proveedor socialmente responsable y comprometido que garantiza las necesidades de los clientes discapacitados visuales – de hecho, ningún otro proveedor destaca en esta zona de influencia y en muchos casos Vodafone Reino Unido es el único que trabaja en el desarrollo de productos de ayuda.
• Las observaciones en cuanto al precio pueden constituir un obstáculo para posteriores investigaciones y resulta importante que se trate este tema. Esto podría verse favorecido gracias al desarrollo de un mayor número de teléfonos y, finalmente, de dispositivos casi básicos que sean compatibles.
• Las organizaciones desempeñan un papel importante para la comunidad de ciegos y deficientes visuales y tienden a ser el canal a través del que se presentan y promueven nuevas tecnologías. Evidentemente, Vodafone necesita continuar trabajando en colaboración y establecer vínculos con las mismas.
142

HACIA UNA MEJORA EN EL SUMINISTRO
• Los aspectos principales que surgen de este estudio y que figuran en la “lista de deseos” para cubrir las necesidades de ciegos y deficientes visuales, incluyen:
• Total accesibilidad:
o Al menú completo de servicios y funciones que pueden utilizar las personas videntes en sus móviles.
o Disponibilidad de un software asistido en una selección de los principales teléfonos móviles.
o Asequibilidad – teléfonos adaptados al nivel elemental y básico de PAYG (sistema de “pago por uso”).
• Formación en materia de concienciación sobre la deficiencia visual para aquellos empleados vendedores en almacenes y en centros de atención de llamadas.
• Designar personal de venta / equipos de discapacidad en los centros de atención de llamadas, quienes tengan un pleno entendimiento de los productos de telefonía parlante.
o En particular, el conocimiento de los teléfonos que admiten (o no) programas de conversión de texto a voz, precios y disponibilidad.
o Poder realizar una demostración completa a la hora de elegir un teléfono.
• Quienes tienen conocimiento de otros prestaciones en productos convencionales que resultan de utilidad para las personas deficientes visuales, tales como pantalla de alto contraste, pantalla con ajuste de color/brillo, marcación por voz, tamaño de la fuente regulable, etc.
• Información actualizada y precisa en la web: sobre teléfonos móviles, aquéllos dispositivos que son compatibles con el programa, fechas de lanzamiento, etc.
• Información y asesoramiento dirigidos a usuarios (mediante una selección de formatos relevantes, i.e. electrónico, macrotipo) sobre temas de telefonía móvil relacionados con clientes ciegos y deficientes visuales: fomentando una mayor concienciación de servicios importantes, tales como los de información telefónica o, por el contrario, aquéllos que se activan por voz.
• Periodo de prueba gratuito para los teléfonos parlantes.
• Software preinstalado – o instalado gratuitamente por Vodafone (en los nuevos teléfonos y cuando se adquiere el software para un teléfono ya existente).
Algunos datos sobre telefonía móvil
143

144
• Voz menos robotizada, con una entonación más natural y la opción de masculina y femenina.
• GPS con voz para dispositivos móviles
• Tecnología de reconocimiento de colores en teléfonos con lentes de cámara.
• Incorporación de un dispositivo de escaneo.
Algunos datos sobre teléfonos
• Control instantáneo del volumen (i.e, mediante una ruedecilla en el teléfono).
• Marca en relieve en la tecla del 5.
• Mayor iluminación cuando suena.
• Pocas teclas de funciones, claramente separadas del teclado principal.
• Definición clara entre las teclas.
• Opción de desactivar la voz cuando el teclado está bloqueado.
• Pantalla con mayor contraste, con la posibilidad de modificar el color de la luminosidad de fondo y el color de la fuente.

Interacción basada en webcam
Joaquín Fonoll y Ambrosio Gassol
Resumen
Durante años hemos estado desarrollando herramientas informáticas destinadas a la atención educativa de personas discapacitadas que facilitaran su acceso al ordenador y a las actividades de clase. Recientemente hemos utilizados técnicas elementales de visión artificial basadas en webcam que, integradas en desarrollos anteriores, han transformado la interfaz tradicional basada en el paradigma teclado, ratón, pantalla. Con todo ello hemos ampliado el número de usuarios potenciales y la tipología de actividades que podemos desarrollar.
SIMUOVE: UN EJEMPLO DE NUESTRO TRABAJO
SiMuove es un programa de ordenador que no se maneja ni con el teclado ni con el ratón, sino que responde directamente a los movimientos captados por la webcam, gracias a un uso elemental de tecnologías de visión artificial.
SiMuove se podría catalogar como un programa de causa – efecto semejante a NetSwitch, el Pictures and Music y otros que se utilizan para la atención temprana, la educación infantil o la rehabilitación.
SiMuove se ha concebido como un entorno abierto que se puede personalizar. Existe un programa editor con el que el profesional puede modificar los contenidos o crear nuevas actividades para ajustarse a los intereses o necesidades del usuario.
Para el usuario la interacción con SiMuove es semejante a los juegos para EyeToy de la PS2 o el Camgoo para PC. En la pantalla se muestra la imagen real del jugador, captada por la webcam, junto a unos objetos virtuales generados por el ordenador. Al tocar virtualmente los objetos, éstos se animan según el modo en que se haya programado.
En SiMuove los objetos son zonas estáticas definidas en el campo de visión de la webcam, isomórfica con la pantalla. Cada zona u objeto dispone de secuencias de imágenes y sonidos que, como un carrusel de diapositivas, avanzan cuando se detecta movimiento, o retroceden al quedarse estático. Es semejante a un juguete elástico que avanza con el movimiento, pero luego se recupera. Si se alcanza el final de la secuencia el programa ofrece un “premio”
Podemos configurar diferentes parámetros para regular la sensibilidad del programa para avanzar, retroceder, crear una secuencia de ejercicios, así como utilizar imágenes con colores transparentes, obteniendo un interesante efecto “croma”.
145

SiMuove requiere un ordenador, funcionando con Windows XP o Suse 10, con capacidad para procesar la señal de vídeo a 15 fps, así como los recursos gráficos y de sonido del programa.
Imagen 1. Portada SiMuove.
Imagen 2. Usuario de SiMuove.
La interacción mediante técnicas de visión artificial permite que una misma actividad de SiMuove pueda realizarse a corta, media o larga distancia, en función del dispositivo que capture las imágenes. Con una webcam deberemos trabajar a una distancia corta y movimientos pequeños, pero con una videocámara digital podremos trabajar a grandes distancias y los movimientos deberán ser mucho más amplios.
A partir de este esquema elemental hemos desarrollado diversas actividades que pueden servir de ejemplo para desarrollos posteriores.
Animaciones
Es el más simple de los ejercicios. Muestra en la pantalla una sola imagen que se anima cuando detecta nuestro movimiento. Este ejercicio trabaja la relación causa efecto y la motricidad, estimulando la movilidad y la coordinación del jugador.
146

Carreras de coches
Simula la conducción de un coche que avanza con nuestros movimientos. En la pantalla se muestra un coche, en cuyo interior nos vemos a nosotros mismos a través del parabrisas, que avanza por el paisaje cuando nos movemos.
Ejercita el control postural y estimula la atención y la motricidad
Adivina
Muestra en la pantalla la construcción paso a paso de una imagen que hay que adivinar. Se trata de un ejercicio para estimular la observación, el pensamiento hipotético y la expresión oral.
Disfrazar
Aquí el ordenador se convierte en un fotomatón que combina la imagen real con un disfraz, en el que se ha dejado uno o más “agujeros” donde poner la cabeza o las manos.
La exploración libre de los disfraces del programa no sólo se trata de una actividad lúdica, sino que permite trabajar el control postural de la cabeza, así como la expresión facial, cosa muy importante en usuarios gravemente afectados.
Para trabajar mediante selección voluntaria del disfraz se ejercita la direccionalidad, el léxico oral, la memoria secuencial y la numeración.
Imagen 3. SiMuove Disfraz.
Imagen 4. Usuario disfrazado.
147

Simetrías
Es el más complejo de los ejercicios realizados. En la pantalla hay dos zonas con mitades de una fotografía que debemos emparejar moviendo la mano derecha o izquierda en cada zona.
No sólo ejercita la lateralidad derecha / izquierda y la coordinación óculo – manual, sino también la percepción de las formas y la memoria visual.
SiMuove – Interfaz ‐Educación
Ver a alumnos escolarizados en centros específicos trabajar con SiMuove nos ha facilitado comprender las ventajas e inconvenientes de esta nueva interfaz y el paradigma educativo asociado.
La interacción mediante técnicas de visión artificial simplifica la interfaz del usuario, ya que el ordenador se maneja como una extensión del propio cuerpo, sin requerir, aparentemente, ningún dispositivo interpuesto. Por otra parte, el control mediante movimientos corporales reduce el esfuerzo físico a realizar, así como la precisión en los movimientos o los aprendizajes específicos para manejar dispositivos y programas.
Esta simplicidad amplía el número potencial de usuarios, favoreciendo aquellos que no pueden manejar otros programas.
La webcam como periférico crea un entorno de trabajo más “ecológico”, libre de cables, soportes y otros elementos invasivos, ya que sólo se requiere contacto visual. Trabajando con el zoom de cámaras fijas robotizadas, semejantes a las que se emplean en vídeo‐vigilancia, se pueden crear espacios interactivos donde la tecnología sea invisible para el usuario.
SiMuove amplifica las consecuencias de los movimientos del jugador, añadiéndoles efectos visuales y auditivos, con la intención de que los movimientos involuntarios o descontrolados pasen a la esfera del control voluntario y significativo.
La integración de la propia imagen en un entorno virtual es un plus que favorece el autocontrol y la estimulación.
La interfaz mediante webcam no requiere estar sentado frente al ordenador, sino dentro del campo visual que podemos modificar con el enfoque. Ello permite abordar otros contenidos menos “escolásticos”, como el control postural, la estimulación sensorial o la psicomotricidad, propios de la atención temprana, la educación infantil o la educación especial.
NUESTRO PROYECTO INTERACCIÓN CON WEBCAM
SiMuove no es el punto inicial o final de nuestro y trabajo, sino tan solo un ejemplo de lo que hemos conseguido gracias al estadio actual de desarrollo de las tecnologías que manejamos.
En nuestra opinión las TIC han modificado profundamente aquellos sectores, como la banca, el comercio, el ocio o el turismo, donde se ha integrado, cosa que todavía no ha ocurrido en la educación.
148

El uso del ordenador debe ofrecer nuevas oportunidades para la educación, especialmente allí donde ésta ha conseguido menores resultados. Un caso evidente, como el propio nombre indica, es la atención a las necesidades específicas, alumnos a los que no les basta con las atenciones ordinarias.
Algunos de los contenidos que se trabajan en la escuela desbordan el uso habitual de los ordenadores, pensados inicialmente para el trabajo de oficina. Aunque no todo el contenido educativo debe ser tratado con el ordenador, sí que hay modos alternativos, tal como muestran los videojuegos y la videoconsolas.
Si superamos el paradigma del teclado y la pantalla como interfaz del ordenador, podremos atender a nuevos contenidos y usuarios.
Antecedentes
SiMuove es el fruto de un proceso que tiene ya una larga trayectoria. Nuestro recorrido se inició en 1980 instalando un aula de ordenadores en un centro de primaria y se consolido en 1987 con la creación del PIE, Programa de Informática Educativa – Generalitat de Catalunya que tenía como objetivo introducir la informática en el sistema educativo de Cataluña.
Nuestro trabajo se caracteriza por centrarse en el ámbito educativo, tener muy próxima la demanda del usuario, disponer de facilidades para dialogar con él y ensayar los materiales.
Por el contrario nuestro equipo es muy reducido y con limitaciones tecnológicas que nos impiden avanzar.
Antes de 1990, introducimos los teclados de conceptos, como un acceso alternativo al teclado para el parvulario y las NEE, cuando los ordenadores era CGA y todavía no se vislumbraba el uso generalizado de los ratones. Nuestro teclado era una tableta digitalizadora de 32 x 32 cm y 10 dpi que se conceptualizaba como un teclado expandido alternativo o complementario al estándar.
El teclado de conceptos nos obligó a resolver la interfaz gráfica para el usuario, mediante sistemas coherentes de pictogramas, así como técnicas de edición y distribución digital de los materiales para facilitar su distribución.
De aquel proyecto nos queda un software, Tswin, que permite crear zonas en un mapa físico cualquiera y asociarles comandos para controlar el ordenador. Igualmente disponemos de más de 100 aplicaciones, que a diferencia de otros proyectos parecidos, hemos ido actualizando, que pueden funcionar sobre Windows XP y actualmente los utilizan algunos alumnos invidentes de Cataluña.
Después de las olimpiadas de Barcelona de 1992 dispusimos de pantallas táctiles donde desarrollamos actividades que se manejaban con los dedos, y el Tpwin, un teclado virtual en pantalla. A partir de esta experiencia comprendimos que las limitaciones físicas de la pantalla reducen el número de aplicaciones educativas y que sólo un número reducido de alumnos las necesita.
149

A partir de 1997 desarrollamos el proyecto TocaToca, un sistema de autor para actividades de causa ‐ efecto que son el inicio de la comunicación persona / ordenador y también permiten trabajar la comunicación persona / persona.
Si habitualmente el niño trabaja estas actividades con el interruptor de la luz o con los juguetes musicales, TocaToca aprovecha las posibilidades multimedia del ordenador para crear espacios complejos y estructurados. El programa ha ido evolucionado con los años y actualmente, además del teclado y el ratón podemos trabajar con el sonido, con el joystic, el DancePad y otros periféricos parecidos.
En el año 2000 Jordi Lagares, un profesor de física de un instituto, desarrolló el Proyecto Fressa http://www.lagares.org, que resuelve la interacción con el ordenador a través del sonido. En Fressa encontramos Globus, un programa de visualización del sonido, Recofone que reconoce patrones de voz o el Control del mouse por voz.
En el 2003 trabajamos con el DancePad y otros periféricos procedentes de los videojuegos utilizándolos como ayudas técnicas para las personas con discapacidad. Ello supuso una doble economía. En primer lugar estos periféricos son más asequibles y accesibles que los periféricos específicos para la discapacidad. En segundo lugar, aplicamos la estrategia de incorporarlos en desarrollos anteriores, Tswin, Tpwin, TocaToca, lo que nos permitió aprovechar el trabajo realizado y disponer de un amplio abanico de actividades.
En el 2004, Cesar Mauri, en aquel momento estudiante de la Universidad Rovida Virgili, desarrolló WebColor un sistema capaz, a tiempo real, de reconocer una marca de color determinado en la imagen que proporciona una webcam.
Webcolor se distribuye como un API de programación con llamadas que retornan las coordenadas de la marca de color, y con ejemplos de programación en C++ y Vb.
Webcolor y las tecnologías de reconocimiento de color requieren entrenar el sistema antes de utilizarlo y, a menudo, se dan interferencias con la iluminación y los colores existentes en el ambiente.
En el años 2000 Jordi Lagares, un profesor de físca de un instituto, desarrollo el Proyecto Fressa http://www.lagares.org, que resuelve la interacción con el ordenador a traves del sonido. En Fressa encontramos Globus un programa de visualización del sonido, Recofone que reconoce patrones de voz o el Control del mouse por voz.
En el 2003 trabajamos con el DancePad y otros periféricos procedentes de los videojuegos utilizándolos como ayudas técnicas para las personas con discapacidad. Ello supuso una doble economía. En primer lugar estos periféricos son más asequibles y accesibles, que los periféricos específicos para la discapacidad. En segundo lugar aplicamos las estrategias de incorporarlos en desarrollos anteriores, Tswin, Tpwin, TocaToca, lo que nos permitió aprovechar el trabajo realizado y disponer de un amplio abanico de actividades.
En el 2004, Cesar Mauri, en aquel momento estudiante de la Universidad Rovira Virgili, desarrolló WebColor un sistema capaz, a tiempo real, de reconocer una marca de color determinado en la imagen que proporciona una webcam.
150

Webcolor se distribuye como un Api de programación con llamadas que retornan las coordenadas de la marca de color y con ejemplos de programación en C++ i Vb.
Webcolor, y las tecnologías de reconocimiento de color, requieren entrenar el sistema antes de utilizarlo y a menudo se dan interferencias con la iluminación y los colores existentes en el ambiente.
En el 2006 Jordi Sánchez, miembro de nuestro equipo y en aquel momento becario del Departamento de educación, desarrolló WebColorToy, un sistema basado en webcam que detecta el movimiento “restando” dos fotogramas consecutivos y devuelve, para un área, un índice de cambio. También se trata de un conjunto de módulos de programación utilizables, compatibles para Linux y Windows.
La ventaja de trabajar con el movimiento, aunque se consiga menor precisión, es que el sistema no requiere de entrenamiento. Es decir, basta con situarse frente a la cámara para ponerse a trabajar.
Imagen 5. Emulator como Joystick.
Imagen 6. Control cámara robotizada.
151

Productos desarrollados
A partir de las tecnologías que conocemos, combinándolas e integrándolas en desarrollos y proyectos anteriores, actualmente disponemos de un abanico de recursos educativos que se distribuyen gratuitamente
Emulator
Es un emulador de pulsador, mouse, joystick, o teclado de conceptos, que funciona con la webcam mediante técnicas de reconocimiento de color o de movimiento.
Emulator, en versión para Windows y Linux, puede utilizarse como una Ayuda Técnica que de forma virtual sustituya a:
• Pulsador. Hace clic sobre el programa activo cuando se muestra u oculta un color.
• Ratón. El puntero de la pantalla se sitúa directamente allá donde señala el cursor de color. Esta aplicación permite trabajar a distancias alejadas, pero requiere un entrenamiento, para no salirnos del campo visual de la webcam, y sólo consigue una precisión semejante a una pantalla táctil manejada con los dedos.
• Joystick. El puntero se desplaza en la dirección que señalamos y se detiene al situarnos en la zona central.
• Tablero de conceptos. Partiendo de una impresión de la pantalla, al señalar el papel situamos el cursor de la pantalla en la zona indicada.
En todos lo casos el clic se realiza por tiempo y se precede de señales visuales y acústicas.
Emular estas ayudas técnicas mediante la webcam tiene una evidente ventaja económica, así como una mayor flexibilidad en equipos, como los de los centros educativos, que son utilizados por diversos usuarios. Además los dispositivos basados en webcam tienen menos averías mecánicas, que pueden ser muy frecuentes en los dispositivos físicos.
Una dificultad, que ha surgido de modo imprevisto, es que los usuarios no aceptan de igual modo los sistemas estándar físicos, con una mayor presencia social, que los virtuales que, además de ser menos conocidos, no proporcionan ninguna respuesta física.
Tswin
El editor de Tablero de conceptos ahora funciona con la webcam sin necesidad de ningún soporte físico. Basta situar la lámina frente a la webcam y señalar sus vértices para calibrarla.
Permite mapear el campo de visión de la webcam, con independencia del tamaño físico que abarque, creando zonas a las que se asignan comandos. Esto convierte en interactiva cualquier superficie
Funciona con tecnología de reconocimiento del color y puede tener problemas si nos separamos de la lámina, al proyectarse los movimientos 3D sobre un plano 2D.
152

TocaToca
TocaToca es nuestra solución para los ejercicios de causa efecto y ahora funciona con la webcam. El campo de visión de la webcam se divide en zonas, en relación isomórfica con la pantalla, que se activan por detección de color y de movimiento.
Imagen 7. TocaToca Fútbol.
Imagen 8. TocaToca contar pelotas.
Con esta nueva prestación, surgen nuevos ejercicios para estimular la motricidad y la coordinación de movimientos en los que podemos incluir la interacción con objetos reales. Así, el ordenador nos aplaude cuando marcamos un gol con una pelota en una portería real, o debemos responder arriba o abajo señalando sobre nuestro cuerpo…
Estas nuevas prestaciones también nos han hecho descubrir nuevas dificultades. Por ejemplo, resulta difícil ubicarse sin salirse del campo visual de la webcam y es complicado tocar unas zonas sin invadir otras.
SiMuove
SiMuove es un desarrollo nuevo, específico para la webcam del que ya hemos hablado ampliamente
153

WebColorToy
Este programa es un juego con webcam en toda regla. El juego muestra varios objetos en movimiento y debemos atrapar algunos y evitar otros. Nuevamente se trata de un entorno de autor que permite definir los objetos, sus movimientos y cómo reaccionan. El juego se estructura en niveles y da vidas y puntos, y la persona puede verse integrada en la imagen.
Las potencialidades de este programa están por desarrollar, aunque permitirá actividad de observación, discriminación y control motriz. Este juego permitirá retomar contenidos pedagógicos tradicionales, discriminación de letras o figuras mediante actividades más físicas. Hay que tener en cuenta que la actividad propiamente dicha se define por el tipo de objetos (figuras, formas, letras, colores) y las reglas del juego.
Imagen 9. WebColorToy.
DanceMusic
Este programa es un generador MIDI que funciona a partir del movimiento de un cursor de color. Le damos al usuario una batuta o unos guantes de color y las coordenadas obtenidas se convierten en notas musicales.
Funciona con el ratón y el joystick, y existen opciones del menú para escoger diferentes instrumentos.
En esta actividad los usuarios exploran un espacio que es físico y, al mismo tiempo, sonoro con lo que permite desarrollar actividades de estimulación, psicomotricidad, danza y música.
El uso de videocámara con zoom posibilita trabajar estas actividades en espacios de mesa, aula o patio. Permite actividades individuales o juegos de grupo, y trabajar sobre el plano vertical u horizontal.
Una vez más, lo importante no es lo que ocurre en el ordenador, sino lo que hace el alumno.
154

Imagen 10. Usuarios con DanceMusic.
Frío y caliente
Es un juego donde hay que encontrar un objeto escondido por el ordenador, por ejemplo: una canción, siguiendo sus instrucciones. Debemos mover nuestro cursor de color al dictado de las órdenes derecha, izquierda, arriba, abajo, o de las señales acústicas del programa.
Este programa es una actividad de discriminación auditiva y orientación espacial. Exige rigor en el control del movimiento para resolver el ejercicio, ya que de otro modo no se consigue.
Nuevamente es un entorno programable, en el que podemos variar las imágenes y sonidos que utilizamos como refuerzo final.
A MODO DE CONCLUSIÓN
Algunos usuarios no pueden utilizar el ordenador con la interfaz actual y algunas de las alternativas disponibles resultan costosas o aparatosas. Muchos de los contenidos a trabajar son propios de la atención temprana, la estimulación sensorial o la discapacidad, y no pueden trabajarse con la interfaz actual basada en el paradigma del teclado, el ratón y la pantalla.
Disponemos de muchas herramientas para crear una nueva interfaz alternativa:
• Programas abiertos, con múltiples ejercicios, que responden a diferentes necesidades educativas.
• La webcam como un sistema de acceso de bajo coste, basado en técnicas elementales de visión artificial que utilizan dos tecnologías de reconocimiento del color o del movimiento, con exigencias y resultado diversos.
• Disponemos de módulos de programación de libre acceso que podemos emplear para :
o Desarrollar emuladores u otras Ayudas Técnicas
o Integrar los nuevos periféricos en programas anteriores, lo que supone una economía de esfuerzos
155

o Desarrollar ejercicios nuevos que optimicen las prestaciones
La webcam como interfaz
La webcam nos proporciona un nuevo paradigma de interfaz que no requiere estar sentado frente al ordenador en una ubicación específica. Se minimiza el esfuerzo físico, las necesidades de aprendizajes previos, el contacto físico. El uso de dispositivos ópticos, y quizás otros inalámbricos, permite un efecto escala que admite trabajar por un igual en grandes espacios o en reducidos. Todo ello lleva a una desmaterialización de la tecnología que, haciéndose invisible, se transforma en ubicua, ampliándose las situaciones y los usuarios potenciales.
A pesar de nuestra pequeñez, la tecnología elemental que empleamos ha proporcionado sus frutos que estamos interesados en compartir con otros equipos e instituciones. Creemos poder desarrollar sistemas con 2 o más cámaras que identifiquen distintas marcas de colores. Ello posibilitaría desarrollar situaciones más complejas. También hemos hecho ensayos con cámaras robotizadas que desearíamos integrarlas en aulas de estimulación sensorial o instalaciones semejantes.
Toda nuestra experiencia la ponemos a disposición de aquellos que quieran acompañarnos en esta aventura.
Bibliografía
González Rus, G. (2002). Pulsadores, conmutadores e interruptores: sistemas de acceso para el discapacitado motórico. En Las nuevas tecnologías en la respuesta educativa a la diversidad. Actas del II Congreso Nacional de Nuevas Tecnologías y Necesidades Educativas (TECNONEET) [en línea]. Murcia: Consejería de Educación y Cultura. Disponible en http://www.tecnoneet.org/actas2002.php
Fonoll, J.; Gassol, A. (2004) “Las TIC al servicio d’una escuela inclusiva” 1r congreso Sobre educación inclusiva‐ Vic
Fonoll, J. (2004) “Nuevos periféricos utilizados como ayudas técnicas para personas con discapacidad ” Taller Tecnoneet 2004 – Murcia
Fonoll, J.; Gassol, A. (2006) “Webcam como sistema de acceso en actividades de estimulación, psicomotricidad y ayudas técnicas” Taller Tecnoneet 2006 – Murcia
Enlaces
• http://www.camgoo.com/
Enlace a la empresa camgoo con demos a juegos comerciales basados en webcam
• http://www.crea‐si.com/
Enlace a la web de CREA‐SI desarrolladores del webcolor, y el ratón facial
156

157
• http://www.lagares.org
Enlace a la web del Fressa. Contiene numerosos programas para el reconocimiento del sonido y la discapacidad
• http://www.xtec.cat/~jfonoll/tocatoca/
Enlace a la web del TocaToca con el programa y las actividades desarrolladas
• http://www.xtec.cat/dnee/udc/
Enlace a la web del proyecto UDC que contiene programas con interfaz basada en webcam desarrollados en el Departamento Educación Generalitat de Cataluña
• http://www.xtec.cat/dnee/udc/act_simuove.htm
Enlace a la página web del SiMuove y las actividades educativas asociadas
• http://www.xtec.cat/dnee/udc/english/main.html
Enlace a la web del Computer Accessibilty Group
• http://www.xtec.cat/recursos/tauleta/
Enlace a la web de la tauleta sensible teclado de conceptos distribuidompor la Genrealitat de Cataluña
• http://www.pnte.cfnavarra.es/creena/010tecnologias/Estimulacion_Sensorial.htm
Enlace al NETSwich traducido al español por el Centro de Recursos de Educación Especial de Navarra.

Juguetes para todos
Flusidor, Carolina Moncada
Istituto Europeo di Desing
Flusidor es un juguete que proporciona experiencias multisensoriales con las que el niño desarrolla su sensibilidad y capacidad de percepción de una manera creativa.
Desde que el niño nace e incluso antes, es totalmente receptivo. Todo lo que le rodea es información que se le va grabando y que va configurando su mundo.
A través de los estímulos que recibe, el niño va conformándose una idea de su entorno y luego la expresa mediante un lenguaje. Este lenguaje varía según la edad: al principio es postural, gestual, más tarde llega el lenguaje que utilizamos de adultos, después de un proceso de asimilación.
De toda la etapa de aprendizaje este proyecto se centra en la relación entre recibir, percibir y comunicar. El objetivo del proyecto es favorecer el desarrollo del niño a través de la percepción de estímulos sensoriales y la asimilación de estos potenciando la creatividad.
Para ello propongo un juego que presente un compendio de sensaciones relacionadas entre si por medio de la Música.
La música es un lenguaje paralelo al que utilizamos, una forma de expresión. Es un mundo lleno de proporciones y perfección dentro de la más fascinante de las libertades.
La experiencia de la Música ayuda a despertar una serie de sensibilidades que te permiten disfrutar del mundo de una manera más plena.
La música se compone de sonidos organizados y distintos unos de otros. Las diferencias entre los sonidos se representan por una serie de parámetros: ritmo (mide la duración en el tiempo de los sonidos), tono (mide la gravedad o agudeza del sonido), volumen (mide la potencia sonora), matiz (expresa el tipo de relación que hay entre los sonidos) entre otros…
Estos parámetros son informaciones de la música, proporciones, en el fondo, numéricas, que se pueden interpretar con otros efectos que no sean sonoros. Yo propongo traducirlo a estímulos sensoriales: texturas, colores, formas, movimiento…Sería muy interesante poder interpretar la música con diferentes estímulos haciendo que sea una sensación conjunta y global de los sentidos, no solo del oído.
Flusidor es una nueva tipología de instrumento de viento. Lo elementos fundamentales son: el aire como fuente de energía, piezas para componer melodías multisensoriales y un mecanismo que soporta la actividad del juego.
159

El aire lo proporciona un globo que se hincha gracias a un fuelle y circula por un conducto de aire que se controla por medio de una válvula.
Cada pieza ofrece un color, un sonido, formas y 4 densidades de textura. El niño juega con ellas, las palpa, las mira, las siente, relaciona las sensaciones y las ordena creando una composición.
La estructura de las piezas tiene una entrada y una salida de aire y alberga el mecanismo sonoro de una armónica. Cada una de ellas produce un sonido diferente.
Las piezas tienen forma de rosquilla y se ensamblan creando una secuencia. De su unión resulta un bloque con un agujero interior que es atravesado por el conducto del aire. Este conducto es un tubo hueco unido al globo que tiene un orificio por donde sale el aire.
El bloque de piezas se adapta a un eje helicoidal paralelo al tubo que al girar gracias a una manivela, hace que las piezas avancen sobre el conducto de aire. Cuando el orificio de salida de la cada pieza se coloca encima del orificio de salida del tubo, el aire hace que la pieza emita su sonido. Dependiendo de la velocidad con la que se gire la manivela se consigue un ritmo u otro en la secuencia de sonidos.
El niño gira la manivela con una mano y pone la otra encima de la pieza que está sonando. Percibe así una sensación global en cada momento; ve un color, escucha un sonido, palpa una textura y siente el aire salir.
Cada melodía que se compone se interpreta de diferentes maneras. No es necesario valerse de los cinco sentidos para poder disfrutar del juguete; el niño adecua el lenguaje del juego a sus capacidades, el mensaje tendrá valor y se podrá interpretar por varias vías sensoriales.
160

Dondolio, Nuria Parrado
Istituto Europeo di Desing
DONDOLIO: palabra que significa balanceo en italiano, define este singular balancín.
INTRODUCCIÓN
A través de toda la infancia el ser humano realiza de manera sistemática juegos espontáneos de equilibrio. Esto nos indica que la estimulación del aparato vestibular del oído interno, es necesaria para la madurez de este sistema, con la importancia que esto conlleva para la integrar la información sensorial. Los artilugios o juguetes que utilizan los niños para este desarrollo, son muy variados, tales como balancines, columpios, patines, etc. según la cultura.
Los juegos de equilibrio en la infancia son producto de la necesidad de este tipo de sensaciones y del entorno. Es la génesis del desarrollo humano. El niño a lo largo de los años ha demostrado la necesidad de desarrollar determinados tipos de juegos en cada una de las etapas de su desarrollo motor. Los juguetes van a ser un elemento esencial en las actividades del niño y por tanto de su proceso madurativo desde el nacimiento. ¿Porqué elige el niño utilizar y preferir determinados juguetes relacionados con la estimulación vestibular de manera sistemática que han perdurado generación tras generación utilizándolos hasta el agotamiento o el aburrimiento? El niño parece calmarse cuando sus padres le "mecen" en la cuna. También se divierte cuando sus padres le colocan encima de las rodillas y lo mueven hacia delante y hacia atrás. Más adelante, busca actividades como todo tipo de columpios que utiliza hasta el cansancio. Después, patina sobre artilugios inestables con ruedas de todo tipo como el patín de ruedas, el monopatín, la bicicleta, etc. desafiando su sentido del equilibrio hasta lo inverosímil. Esto obedece más a una necesidad biológica que a una cuestión cultural o meramente accidental. Estas actividades tienen un hilo común y no solo le atraen y divierten sino que las necesita desde el punto de vista biológico.
LA IMPORTANCIA DE LA ESTIMULACIÓN DEL ÁREA VESTIBULAR
Los sistemas sensoriales básicos para el desarrollo infantil, sin los cuales el niño no logra una correcta madurez neurológica, son los llamados internos o inconscientes, porque se perciben de forma interna, y los receptores sensoriales no se encuentran en contacto directo con el exterior. Estos participan directamente en la correcta formación y desarrollo de las habilidades de los niños. Estamos hablando del sentido del movimiento (o vestibular) y del sentido de la posición del cuerpo en el espacio (o propiocepción).
Los niños necesitan moverse, saltar, correr, columpiarse... para poder adquirir habilidades motrices cada vez superiores, y también necesitan explorar su propio cuerpo, conocer sus
161

límites corporales y sus formas, para poder adquirir una autoestima y una autoconfianza adecuadas y necesarias para seguir creciendo a nivel personal.
SISTEMA VESTIBULAR: Este sistema es de formación muy primitiva, ya que la vía vestibular es la primera vía sensorial en formarse, junto con las vías sensitivas. El aparato vestibular (también llamado laberinto) es un órgano no auditivo situado en el oído interno que sirve fundamentalmente para el control de la postura y el equilibrio, pero también para regular el tono muscular, los movimientos oculares y la orientación espacial. El aparato vestibular responde específicamente a la fuerza de la gravedad y a los movimientos de aceleración y desaceleración angular.
El vestíbulo, que es parte del oído interno, controla el balance, coordinación, verticalidad, tono muscular de los músculos de nuestros ojos, todos los estímulos relacionados con el movimiento, la fuerza de la gravedad y el equilibrio; procesados en el oído interno. El sistema vestibular permite coordinar los movimientos del cuerpo, de los ojos y de la cabeza. Si este sistema no funciona correctamente, o no recibe la estimulación necesaria, el niño puede presentar dificultades de equilibrio, retraso en el lenguaje, problemas de coordinación, torpeza. Este sistema sensorial es básico para el desarrollo del tono muscular, la coordinación de los dos hemicuerpos y el mantenimiento erecto de la cabeza en posición contra gravedad. Otra parte importante del oído interno es la cóclea. Su función es el analizar sonidos. El vestíbulo y la cóclea están enlazados y actúan como enlazadores de comunicación entre el sistema nervioso y el cerebro para toda la información sensorial. El tacto, la visión y la escucha son interpretados por nuestro sistema vestibular‐cóclear. El sistema postural es de formación muy primitiva, ya que la vía vestibular es la primera vía sensorial en formarse, junto con las vías sensitivas.
Mediante la estimulación vestibular se desarrolla la propiocepción o Sentido de la posición corporal. Estrechamente vinculada con el sentido vestibular, la cual nos da un conocimiento de la posición del cuerpo. Es este sentido, el que permite a una persona guiar hábilmente los movimientos de sus brazos o piernas sin tener que mirar cada acción que realiza. Cuando la propiocepción funciona eficientemente, la posición corporal de un individuo se ajusta automáticamente. También nos permite manipular hábilmente objetos como lápices, botones, cubiertos, peines.
Este sentido nos facilita información acerca de la posición del cuerpo, con lo cual permite guiar los movimientos de nuestro cuerpo sin necesidad de observar cada una de las acciones que realizamos. Permite al niño mantenerse sentado en una silla sin caerse, y posteriormente le facilitará el mantenimiento del equilibrio encima de una bicicleta.
Las sensaciones propioceptivas son las que aportan información sobre la situación del cuerpo en el espacio. Forman la base del movimiento. Están muy relacionadas con las informaciones provenientes del sentido de la vista.
Los receptores de las sensaciones propioceptivas se hallan situados en los músculos y articulaciones, así como el aparato vestibular del oído interno. Los impulsos se trasmiten hasta las zonas correspondientes del córtex y cerebelo, y así se tiene conciencia de la postura, situación de las partes del cuerpo, equilibrio o desequilibrio, etc.
162

La integración sensorial es la organización de los sentidos. Los sistemas vestibular y propioceptivo comienzan a funcionar muy temprano en la vida, aún antes de nacer. Estos sentidos básicos están estrechamente conectados entre sí, y forman interconexiones con otros sistemas del cerebro a medida que el individuo crece y se desarrolla. La interacción entre varios sentidos es compleja, y una persona la necesita para poder interpretar correctamente una situación y dar una respuesta apropiada.
La función de planificar motóricamente: La integración sensorial no solo nos permite responder apropiadamente a sensaciones nuevas, sino que también nos guía para nuestro desempeño en el ambiente. Por ejemplo, la planificación motora es una adquisición que depende de una eficiente integración sensorial. Implica tener idea de lo que hay que hacer para planificar una acción y luego poder ejecutarla. De esta manera muchas nuevas acciones son planificadas, usando información de experiencias anteriores y las sensaciones que las acompañaron. El sentido táctil, propioceptivo y vestibular son particularmente importantes para suministrar información acerca de cómo se mueve el cuerpo, y cómo puede ser usado, para actuar en el ambiente que lo rodea y reconocer o anticipar las acciones. Cuando la planificación motora tiene lugar, una persona es capaz de enfrentar una tarea completamente nueva para él organizando una nueva forma de acción. Un ejemplo, puede ser el niño cuando se encuentra por primera vez ante un juguete para montar, y puede resolver como subir y bajar de él sin ninguna instrucción previa. La planificación motora implica atención consciente a una ocupación, mientras se cuenta con información almacenada relacionada con sensaciones inconscientes del cuerpo. La integración sensorial y su desarrollo nos indican como el aparato vestibular realiza junto con el cerebelo una función de "guardia de tráfico" regulando los distintos imputs sensoriales que llegan al cerebro. Este es el motivo de que en su propuesta de rehabilitación en personas con necesidades especiales de este orden incluyan numerosas propuestas en este sentido.
Tienen un alto interés para los niños en las primeras edades y posibilitan desarrollos decisivos para su madurez neurológica. A través de estas actividades el niño ejercita y entrena durante horas, días y semanas de manera insistente su equilibrio. Esta capacidad incide sobre su control tónico‐postural y hacen más eficiente su sistema nervioso, hacen madurar su oído interno (sistema vestibular) y favorecen su desarrollo físico.
La relación del sistema vestibular con la audición indica que el aprendizaje del habla tiene relación con ello y esto con la construcción del pensamiento y éste con la lectura y escritura a parte de otros importantes procesos de aprendizaje como la habilidad motriz. Es decir, la estimulación psicomotriz terapéutica con estimulación vestibular no sólo se propone a fin de favorecer y mejorar no sólo las habilidades motrices estáticas (control postural y posicional) y dinámicas (coordinación de los movimientos y adaptación córporo‐espacial), sino también aprovechar esos logros con el propósito de incrementar las habilidades y capacidades cognitivas y comunicativas tanto en sus aspectos lingüísticos como en aquellos que deriven y/o dependan de sistemas alternativos y/o aumentativos.
En la utilización del desarrollo del equilibrio con finalidad educativa se ha producido una evolución en los enfoques metodológicos en el sentido de su consideración desde lo funcional. Merecen una consideración especial aquellos enfoques que, sobre la base de las
163

consideraciones neurobiológicas del equilibrio, han implementado un abordaje terapéutico de los trastornos de la integración sensorial, específicamente de la integración propioceptivo‐vestibular, y que muestran esperanzadores resultados.
MOTIVACIÓN: PROVOCAR SENSACIONES DESARROLLANDO EL EQUILIBRIO
Dondolio se centra en la importancia del desarrollo de la capacidad vestibular. Esta capacidad está estrechamente relacionada con el equilibrio y la coordinación de movimientos, de ahí que a los niños les guste tanto columpiarse. Es también el motivo por el que cuando somos pequeños nos gusta tanto dar vueltas sin parar para luego perder el equilibrio. Son sensaciones emocionantes con las que conseguimos ejercitar un aprendizaje mucho más importante de lo que en un primer momento pueda parecer.
El movimiento es fundamental para el desarrollo integral humano, a partir de este concepto el ser humano puede estructurar su inteligencia. Sin embargo, existen niños que tienen la movilidad restringida por diferentes causas que pueden ser de origen sensorial o físico, tal es el caso de personas ciegas, sordo‐ciegas, con parálisis cerebral, con deficiencias motoras... en definitiva, con diferentes tipos de necesidades especiales.
Las restricciones en la movilidad generan estados de gran conflicto emocional; a pesar de querer desplazarse, las condiciones de deficiencia motora o sensorial impiden o limitan la satisfacción de ese deseo, con lo cual se afecta tanto la imagen de uno mismo como las oportunidades para estructurar el mundo. Por ejemplo, el niño invidente, aunque no tenga problemas de movilidad, siente inseguridad y temor de desplazarse, con lo cual, además de afectar a su capacidad para establecer relaciones con los objetos, afecta también su capacidad de representación mental del espacio.
Una parte fundamental del proceso de educación o rehabilitación de quienes tienen este tipo de limitaciones de orden motor o sensorial es la promoción de la movilidad y la orientación. Los niños sólo pueden aprender a equilibrarse desequilibrándose. Ese es el motivo por el que es esencial facilitar un juguete que favorezca la mayor cantidad de posibilidades de equilibrio y desequilibrio.
La estimulación vestibular mejora las capacidades tanto motrices como comunicativas de niños con necesidades educativas especiales. La mejora del dominio corporal supone, la adquisición de múltiples conductas motrices de carácter utilitario, lúdicas y expresivas, que son fundamentales para el desarrollo integral del niño. Es un proceso en el que, mediante una exploración de las propias posibilidades corporales se activan mecanismos cognitivos y motores.
IDEA: Dondolio, 360º de divertidos balanceos.
Para evitar problemas de espacio a la hora de guardar el juguete, Dondolio es un hinchable de goma forrado con tejido engomado. Tiene forma de media esfera hueca donde en niño se introduce y se balancea sujetándose a unas asas de goma sintética. Como sistema de seguridad, para que no vuelque, incorpora unos anillos en el borde que sirven de elemento pivotante. Estos anillos, además, contienen un juego de equilibrio que consiste en conseguir, mediante el balanceo controlado, que una pelota complete un recorrido de obstáculos
164

planteado por un zig‐zag de PP. La forma de zig‐zag nos permite el plegado de este elemento para guardarlo también cómodamente. Dondolio posee un refuerzo inferior fabricado en compuesto de PP y viruta de madera que lo protege de la fricción con el suelo. Material con propiedades superficiales y de resistencia al agua y humedad similares al plástico pero mecánicamente más resistente, además de ser parcialmente biodegradables. No se deforma, resquebraja, astilla, ampolla ni descascara, no se pudre ni se descompone. Una vez deshinchado este refuerzo contiene la parte hinchable. Las dimensiones de dicho refuerzo hacen que Dondolio sea fácil de guardar en casa cuando lo deshinchamos. El juguete queda reducido a un diámetro de 420mm por 74mm de ancho.
La reacción inicial de cualquier persona al estar en una semiesfera colocada en el suelo es comenzar a oscilar y a moverse. Estos movimientos en niños, con o diversidades funcionales o si ellas, desarrollan la capacidad vestibular, la propiocepción, la coordinación de movimientos, el tono muscular, el control postural, la integración sensorial…además de proporcionar diversión.
Al ser una semiesfera los movimientos de equilibrio‐desequilibrio son mucho más ricos que los de un balancín convencional.
EDADES APROPIADAS PARA EL JUGUETE
Como ya hemos ido viendo el desarrollo vestibular es uno de los primeros aprendizajes inconscientes que ejercitamos. Incluso con los movimientos que realizamos antes de nacer, ayudados por el entorno que nos envuelve, el líquido amniótico, ya estamos ejercitando dicha capacidad. El movimiento es inherente al ser humano. Inconscientemente también los adultos
165

contribuyen en este ejercicio a edades muy tempranas. Cuando mecemos o acunamos a un niño no estamos más que favoreciendo este desarrollo, al igual que cuando jugamos con los niños al "aserrín‐aserrán" (balanceos del niño sobre nuestras rodillas). Es por esto que no hay una edad clave para trabajar el equilibrio. A los tres años, con la madurez del sistema nervioso, hay una necesidad de movimiento ya que es una de las mayores fuentes de placer en este periodo. A partir de esta edad el control postural es mayor, con lo cual los niños ya podrían empezar a usar solos, aunque con vigilancia, el juguete como simple balancín. No obstante desde el nacimiento puede ser utilizado por los padres para mecer y balancear al bebé. Sin embargo, el juego interno del recorrido de la bola que se propone en nuestro juguete iría destinado a niños a partir de cinco años aproximadamente, en adelante. Es necesario pasar de un juego meramente espontáneo al interés por un tipo de juego organizado para poder disfrutar al 100% del juguete. El recorrido que hace la bola en el interior del anillo está sujeto a unas reglas simples. La superación de los obstáculos requiere unos razonamientos lógicos que el niño debe de hacer para ir guiando la bola. Claro está que hablamos de niños sin necesidades especiales. Sería imposible hacer este razonamiento teniendo en cuenta todas las diversidades funcionales posibles puesto que en cada niño con necesidades especiales variaría el rango de edad apropiado para según qué actividades.
A raíz de este planteamiento hemos considerado las medidas de niños de tres a seis años para diseñar en proporción el juguete.
166

Flip Flop Memory, Estefanía Maurey
Istituto Europeo di Desing
El propósito de Flip Flop Memory es el de ser un juego que permita a todos participar, a la vez que se desarrolla la memoria durante el crecimiento del niño. Los juegos que se suelen encontrar en el comercio no son accesibles para todos los niños
Antes del primer año, el niño ya es capaz de reconocer rostros, sin aun saber distinguirlos. Hasta los 4 años, la evolución de la memoria es más bien lenta. Pero de los 4 a los 5 años, la memoria del niño está en gran desarrollo. Es a partir de los 4 años cuando el niño ya es realmente capaz de utilizar la memoria como herramienta de juego.
Los 4 años, coinciden con el momento en el que el niño empieza a socializarse (a jugar con otros niños), a adquirir nuevas habilidades motrices, en el que su inteligencia y creatividad están en plena evolución, y en el que el lenguaje está en completa expansión.
Una de las problemáticas que se resalta es que en muchos juegos no se contempla a todos los usuarios, y por ejemplo, juegos en los que se usan gráficos quedan fuera del alcance de las personas invidentes, o aquellos en los que se usan elementos de forma plana no permiten ser manejados por personas con reducida motricidad fina.
Descripción del juego:
Flip Flop Memory es un juego de mesa para mayores de cuatro años. Invita a pensar, asociar, y aprender cosas nuevas desarrollando con ello la memoria, la inteligencia y el nivel sensorial. Implica la participación de más de una persona, de dos a seis jugadores, y favorece las relaciones con otros niños, niñas y personas adultas. Ha sido adaptado para ser disfrutado por personas invidentes así como para aquellas personas con dificultad de motricidad fina.
167

El juego está compuesto por 72 fichas y 3 comodines. Dichas fichas se reparten en 6 familias compuestas cada una de ellas por 12 fichas. Las familias son: deportes, habitación, ropa, baño, cocina y alimentos. Cada ficha tiene, en una de sus caras un dibujo diferente al de las demás. Tenemos, por ejemplo, en la familia deportes, unas zapatillas de fútbol, una pelota de fútbol, unas gafas de buzo, unas aletas, unos bolos, … en la familia habitación, un armario, una percha, una estantería, unos libros, un equipo de música,… en la familia ropa, un traje de astronauta, un casco de astronauta, un bañador, un flotador, unas botas de agua, … en la familia baño, una tiritas, un botiquín, un inodoro, un rollo de papel higiénico, un cepillo de dientes, … en la familia cocina, unos cubiertos, unos platos, un congelador, unos cubos de hielo, una botella, … o en la familia alimentos, una vaca, un envase de leche, una gallina, unos huevos, una manzana, …
La preparación del juego es sencilla. Cada jugador escoge una familia. Se jugará con las fichas escogidas y los tres comodines. Es decir que si juegan cuatro jugadores, solo se utilizarán aquellas cuatro familias elegidas y los tres comodines, las dos familias restantes se retirarán del juego. Entonces, todas las fichas se colocarán bocabajo en la mesa, aleatoriamente, de forma que no se vea su dibujo.
El objetivo del juego es que cada jugador reúna las 12 fichas de la familia escogida. Para ello, los jugadores tendrán, cada uno en su turno, que escoger dos fichas y voltearlas de tal forma que ellos mismos y los demás jugadores puedan ver cuál es el dibujo de esas fichas. El jugador se quedará con las fichas que ha volteado solo si son de la familia que ha escogido (por ejemplo, si ha escogido la familia alimentos y destapa la vaca y los huevos). En ese caso, volverá a jugar. En el caso contrario, las volverá a colocar tal y como estaban y le tocará el turno al siguiente jugador. En caso de que un jugador destape un comodín durante su turno, este deberá realizar lo que este último indique. Cada comodín tiene una indicación diferente: voltear cuatro fichas a la vez, remover todas las fichas de la mesa o intercambiar la familia con la del siguiente jugador. Una vez que haya sido destapado un comodín, se retirará del juego y le tocará el turno al siguiente jugador.
El primer jugador en reunir todas sus fichas será el ganador. Existe una modalidad de juego más difícil que es muy similar a la anteriormente descrita y que simplemente varía en el momento en el que el jugador voltea las dos fichas. En este caso, el jugador se quedará con las fichas que ha volteado solo si son de la familia que ha escogido y si la una con la otra forman una “pareja” (por ejemplo, si ha escogido la familia alimentos y destapa los huevos y la gallina).
168

En ese caso, volverá a jugar. En el caso contrario, las volverá a colocar tal y como estaban y le tocará el turno al siguiente jugador.
Particularidades
Una de las características destacables de las fichas del juego es la “alita” que sobresale hacia arriba, tanto por la parte superior como por la parte inferior de la ficha. Permite que pulsando una de esas “alitas” se levante la ficha por el lado opuesto, facilitando así el agarre. Esta singularidad permite a las personas con difícil presión en las manos jugar fácilmente al Flip Flop Memory.
La segunda característica importante es referente a la gráfica y a su lectura táctil. Es fácil diferenciar visualmente las familias entre ellas y los comodines. Todas las fichas tienen un mismo marco (alrededor del dibujo) de un determinado color, el de los deportes es verde, el de la habitación naranja, el de la ropa azul marino, el del baño azul claro, el de la cocina rojo, el de los alimentos amarillo y el de los comodines morado. A nivel táctil, también se ha facilitado la lectura. Cada familia se identificará de forma táctil con marcas o relieves que se encontrarán en el marco, en la parte inferior a la derecha. Tendremos un punto de relieve para la familia de los deportes, dos para la habitación, tres para la ropa, cuatro para el baño, cinco para la cocina, seis para los alimentos y no habrá ninguno para los comodines. De esta sencilla manera se distinguirán las familias entre ellas y los comodines de las familias.
También se podrá distinguir cada uno de los dibujos ya que comportan relieve para poder ayudar a las personas invidentes a reconocer los diferentes elementos dentro de cada familia.
Para facilitar al máximo el funcionamiento del juego, los dibujos escogidos para las fichas son conocidos de todos los niños, o forman parte de su aprendizaje. Organizando estos dibujos dentro de grupos temáticos, se facilita la capacidad de memorizar, de asimilar y aprender. Es un punto muy importante para que el juego sea un verdadero entretenimiento y no esfuerzo.
También hay que destacar que las familias siguen un orden dificultad, siendo la de los deportes la más sencilla y la de los alimentos la más difícil (cada punto de relieve inscrito dentro del marco de la ilustración indica un nivel de complicación, cuanto más puntos, más difícil). De la misma forma, la lectura táctil sigue este patrón. Son más fáciles de distinguir los elementos de la familia deportes que la de los alimentos. Las pelotas que se usan en los deportes tradicionales se identifican por su tamaño, peso y color, pero también por las formas o líneas que lleve dibujadas, como la pelota de tenis de la de fútbol. Eso permitiría incluso a las personas totalmente invidentes distinguir fácilmente los dibujos dentro de esta familia. La familia siguiente (2 puntos de relieve en el marco) implica un nivel de dificultad mayor que la
169

170
anterior, aunque siendo elementos muy cercanos, el tema es la habitación, es menos difícil que la de la ropa (3 puntos). Después tendríamos la familia del baño (4 puntos), la cocina (5 puntos), y finalmente la de los alimentos. Son los entornos con los que progresivamente se van encontrando y familiarizando los niños durante esta etapa de su evolución.

PlofPlof el tótem marino, Cristina Morales
Istituto Europeo di Desing
“Del cuerpo como materia al cuerpo como memoria: en el cuerpo almacenamos información y a medida que le imprimimos experiencia y le dotamos de lenguaje lo convertimos en mapa de nuestro conocimiento” Eulalia Valldosera.
Esta frase resume el punto de partida de este proyecto, basado en el concepto de universalidad y adaptabilidad para una correcta autonomía de los niños en un acto tan cotidiano como es la hora del baño.
La idea de Plofplof surge a través de valores como la vinculación entre cuerpo y movimiento para realizar una acción, la propiocepción o el sentido de posición del cuerpo, el juego como un medio para adquirir un hábito y autonomía personal, la experimentación del niño con elementos externos (en el baño encontramos estímulos táctiles, auditivos, olfativos y visuales), el sentido del orden y el espacio a través del propio cuerpo y la coordinación óculo‐manual y las destrezas motrices necesarias para un correcto desarrollo.
Las edades que abarca este juguete están entre los 2 y los 5 años de edad.
Durante este periodo de tiempo es cuando el niño comienza a adaptarse a situaciones nuevas mediante esquemas adquiridos anteriormente, buscará nuevos medios y estímulos, intentará aumentar su grado de autonomía manipulando los objetos del entorno que le rodea, se iniciará en la “actividad objetal”, dando a cada objeto el uso que le corresponde, por lo que se le ha de proporcionar la experimentación con elementos como la arena, el agua, el barro... para que comience a consolidar su actitud ante la limpieza.
Será entre los 2 y los 3 años cuando comience a conocerse a sí mismo, primero exteriormente y luego interiormente, utilizará su imaginación como un medio de ensayo para acercarse a la realidad mediante el juego simbólico.
Entre los 3 y 4 años será capaz de representar en su pensamiento la acción que va a realizar, así como expresar hechos pasados (recuerdos) y se verán incrementadas su autoestima, seguridad y autonomía. Entre los 4 y los 5 años, será cuando comience a gustarle terminar cualquier actividad que empiece.
La hora del baño comprende una serie de vínculos y estímulos necesarios para el correcto desarrollo de los pequeños, desde ese momento relajado que comparte con sus padres, pasando por la transformación de la materia (agua, jabón, espuma...) y los diferentes estados (húmedo/seco) que le dan un abanico de texturas, y olores, pesos, densidades y volúmenes únicos para estimular todos sus sentidos.
171

Plofplof trata de reunir todos estos valores: Ayudar al niño a desarrollar las nociones de espacio, tiempo y representaciones secuenciales a través de todos los elementos necesarios para la hora del baño, la diferenciación de texturas y olores que orienten a los niños con problemas visuales, así como aquellos que tengan problemas cognitivos, ya que se tratarán de acciones repetitivas sencillas, con una secuencia ordenada de pasos con un hilo conductor. En el caso de niños que padezcan autismo, se tratará de poner énfasis en el orden y los tiempos entre acciones, además de ese carácter abierto, para que sus elementos se puedan organizar según las habilidades y necesidades del niño.
Descripción de Plofplof
Plofplof se podría concebir como la frontera entre un juguete y un objeto funcional. Cada una de sus partes ha sido pensada para adaptarse a cualquier tipo de baño.
Tiene dos posiciones de uso:
Horizontal: Cuando se utiliza como taburete para que el niño alcance el lavabo para otros actos de aseo como peinarse, lavarse las manos o cepillarse los dientes
Vertical: Cuando se introduce en la bañera o plato de ducha para que el niño comience a asearse.
De modo descriptivo las partes de que se compone son las siguientes:
172

En los cantos superior e inferior posee un anillo antideslizante de silicona para evitar resbalones del pequeño cuando lo use como taburete y permitir una mejor estabilidad cuando se utilice dentro de la bañera o plato de ducha.
El cuerpo exterior tiene una serie de agujeros en sus paredes que permiten el drenaje del agua en su interior para aumentar su estabilidad y en sus cantos se observan 4 hendiduras verticales que actúan como carriles guía, en cada una de ellas encontramos un sensor del nivel y la temperatura del agua de forma esférica, que cambia de color al sobrepasar los 31ºC para indicar la temperatura del agua, éste sube a medida que aumenta el nivel de agua de su interior, llegando hasta un tope en el carril guía, indicando de esta manera al niño hasta dónde debe llenarse la bañera.
El interior de Plofplof: Tierra y Mar
Plofplof se compone interiormente de dos compartimentos opuestos, Tierra y Mar. Sus elementos se encargan del desarrollo de diferentes destrezas motrices, así como de la noción espacio‐ temporal en el niño.
Tierra: Representa los pasos que se dan fuera de la bañera o plato de ducha. Este compartimento consta de una red para la ropa sucia adaptable a cualquier tipo de toallero. Se extrae únicamente levantando la tapa superior.
Mar: Abarca los pasos que se dan dentro de la bañera o plato de ducha. Este compartimento tiene en la parte superior un mango que gira en un único sentido (el mismo que se utiliza para
173

174
abrir los botes), y que sólo permite ver un elemento de la secuencia a la vez, evitando así que el niño lo gire y cambie el orden de sus elementos interiores. Sus componentes son: una concha de mar, una gota de agua, un pulpo y una estrella de mar.
Estos elementos son los dosificadores de agua, jabón y champú, y se pueden reorganizar en el interior del compartimento de Mar libremente, según las necesidades de cada sesión de baño.
La concha y la gota de agua: Se insertan la una en la otra y se encargan del paso del agua. La concha de mar tiene una forma similar a la misma, sólo que en la parte posterior posee una agarradera, para aquellos niños con poca capacidad de agarre en las manos, y en uno de sus extremos se cierra y acaba en una boquilla, ya que se utiliza posteriormente a modo de embudo para recargar el resto de los dosificadores.
El pulpo: Tiene un brazo alrededor de un extremo a otro de su cuerpo, que se cierra a modo de tapón lateral, además de ser flexible y poder adaptarse a modo de agarradera para las manos del niño si éste lo requiere.
La estrella de mar: Se compone de dos lados y actúa como una manopla, uno devellos posee una serie de bolas que arrastran el gel de su interior, y el otro está formado por una redecilla que sirve para formar espuma. De esta forma, se voltea la manopla según te des el gel o formes espuma.

El papel de los usuarios ante las nuevas tecnologías para la diversidad
Javier Romañach, Mario Toboso, Elías Morán, Gonzalo Arjona, Javier Arroyo y Jorge Sánchez
Resumen
Este artículo recopila los puntos de vista de varias personas con diferentes tipos de diversidad funcional, con experiencia y formación en el campo de las nuevas tecnologías, sobre el papel que deben ocupar en el proceso del desarrollo de nuevas tecnologías para la diversidad y su opinión sobre algunas de las ideas que fueron presentadas en el congreso drt4all celebrado en Madrid el al año 2007.
Introducción
La inversión en nuevos desarrollos tecnológicos para las personas con diversidad funcional se va incrementando en Europa. Sin embargo, el desarrollo de productos y servicios en ese ámbito sigue un desarrollo muy lento en nuestros mercados. Los motivos por los que este desarrollo es lento y no se corresponde a los niveles de inversión son muy variados (fraccionamiento del mercado, cadenas de distribución débiles, diversidad cultural e idiomática, etc.) y entre otros se puede observar la ausencia de soluciones reales para las personas con diversidad, debido a la ausencia de su criterio a lo largo del proceso.
Por ello, se hace imprescindible la presencia de personas con diversidad funcional que sean conocedoras de su realidad, sus necesidades y de la tecnología, en todas las fases de los proyectos de I+D y su opinión debe ser escuchada en todos los ámbitos de conocimiento relacionados con estos proyectos, incluidos los congresos como el que nos ocupa, que ha demostrado este concepto, incorporando una mesa de usuarios en las dos ediciones que lleva.
El contenido de este artículo es el resultado de recopilar la opinión de los usuarios, usuarios con diversidad física, visual y auditiva, respecto al rol que deberían tener y respecto a aquello que han valorado como más relevante del propio congreso.
175

Precedentes europeos
La participación de los usuarios, en concreto, de las personas con diversidad funcional, en los proyectos de I+D en los que se desarrollan ideas relacionadas con la diversidad, es una idea que lleva varios años en marcha en Europa.
Para dotar de un marco teórico a esa participación se desarrolló a finales de los años 90 el programa FORTUNE, del que se extrajeron valiosas conclusiones y un marco de funcionamiento.
Ese marco de funcionamiento está basado en las siete ideas fundamentales que deben regir la participación de usuarios en proyectos de I+D. Estas ideas son las siguientes:
• Cooperación – Los usuarios deben participar cooperando en los proyectos en igualdad de condiciones que el resto de los socios
• Representatividad – Los usuarios deben representar a una organización de usuarios, a la que representan en el proyecto
• Igualdad retributiva – Los usuarios reciben salario equiparable al que reciben el resto de los participantes del proyecto
• Accesibilidad – Tanto la información como los lugares de trabajo y reunión deberán ser accesibles para el usuario, de acuerdo con su diversidad funcional
• Personal cualificado – Todos los socios deberán integrar en el proyecto a personal cualificado para la tarea que deba realizar
• Plan completo – Los proyectos deberán tener un plan completo en el que se incluyan los paquetes de trabajo correspondientes a la participación de usuarios
• Participación desde el principio – Los usuarios participaran en los proyectos desde su fase inicial y participaran en su desarrollo integral
Se espera que la aplicación de estas ideas y la participación usuarios más preparados redunden en un beneficio para todos y se consigan mejores productos adaptados a las necesidades de las personas con diversidad funcional en toda Europa.
EL PRINCIPAL PAPEL PARA LOS USUARIOS
Gonzalo Arjona ‐ COCEMFE
En representación de la Confederación Española de Personas con Discapacidad Física y Orgánica COCEMFE, he podido asistir en estos días al II Congreso Internacional sobre Domótica, Robótica y Teleasistencia DRT4ALL, en el que se nos han presentado, como muy bien indica su lema “un escaparate de futuro abierto al presente” en todo lo relativo a mejorar la calidad de vida de las personas, por medio de las nuevas tecnologías.
A lo largo del Congreso hemos podido observar las innumerables investigaciones llevadas a cabo en el campo de estas nuevas tecnologías, los últimos progresos y las incuestionables
176

soluciones, que desde la Domótica, la Robótica y la Teleasistencia aportan la aparición de nuevos servicios que facilitan la autonomía personal y mejoran la calidad de vida de las personas con algún tipo de discapacidad.
Pero en todo este entramado científico, surgen de inmediato una serie de preguntas. ¿Donde se ubica el papel de los usuarios en estas investigaciones? ¿Cómo participamos los usuarios en las investigaciones de futuras soluciones, que se supone van a servirnos para mejorar nuestra calidad de vida? ¿Se hacen productos y servicios para los usuarios o somos los usuarios los que nos adaptamos a los productos y servicios?
Es común en las investigaciones y en el surgimiento de nuevos productos, que el usuario participe casi siempre al final del proceso, como evaluador de la solución final o como testador del producto. Es el usuario el que tiene que probarlo para saber cómo puede amoldarse al producto o servicio.
Pero la reflexión que se saca es que esto no debiera ser así. El usuario, en todo momento debe de ser partícipe desde el primer momento en que se ponga en marcha un proyecto en el que se vea involucrado; casi desde que surja la primera idea del mismo, porque de él saldrán las verdaderas necesidades y demandas, y de el surgirán los primeros contratiempos y las principales soluciones. Con ello, todo proyecto ganaría en tiempo, medios y esfuerzos, reduciendo enormemente los costes y ofreciendo una calidad y seguridad desde el primer momento en que salga al mercado.
Y no solo deben de estar presente en dichos proyectos, sino que el usuario debe de estar presente en cualquier entidad u organismo que lleve a cabo procesos de estandarización y/o normalización, ya que es el usuario el que se encuentra día a día con los problemas con los problemas de uso de las nuevas tecnologías, y es él quien puede ofrecer una visión menos sesgada de lo que ofrece el producto o servicio. Son muy buenas en ese sentido, las aportaciones que nos da Europa con iniciativas como FORTUNE y últimamente USEM, en cuyos objetivos se busca la incorporación de usuarios en procesos de estandarización.
En otro orden de cosas me gustaría hacer mención a una parte del Congreso en la hemos podido ver las últimas novedades en Teleasistencia, en los cuales el servicio deja de ser un mero dispositivo que soluciona accidentes domésticos y pasa a convertirse en un dispositivo que esta presente en todos los aspectos vitales de la persona: hogar, salidas a la calle, viajes. Con ello, el usuario gana en prevención y seguridad, se fomenta la recuperación de su red social y pierde esa soledad característica de las personas con dependencia. A estos servicios se incluyen otros más de telemedicina y control de la salud, en los cuales se controla al paciente en todo momento. Para ellos se incluyen avances científicos relacionados con los sensores, la Domótica y la Inteligencia Ambiental que proporcionan un entorno seguro y fiable en cuanto a la seguridad y la prevención.
Estas nuevas tecnologías unidas a la aprobación de la Ley de Promoción de la Autonomía Personal y Atención Personal a la Situación de Dependencia, van a dar un enorme giro a la situación de muchas personas que por su condición física no pueden llevar a cabo una vida lo suficientemente digna. Esto dará una serie de oportunidades para nuevos negocios dirigidos a prestar servicios de teleasistencia a personas dependientes y a servicios nuevos orientados a la
177

calidad de vida de las personas. En estos negocios siempre debe de buscarse, la calidad y el bienestar del usuario como factor importante a la hora de ofrecer estos servicios, teniendo siempre en cuenta los valores éticos y morales que implica una situación de estas características (inviolabilidad del domicilio, respeto a la persona, etc.).
En definitiva, el papel de los usuarios es muy importante ya que en el fondo es el fin que justifica toda actuación que implique una mejora en la calidad de vida de las personas con algún tipo de dependencia
CONCLUSIONES DEL DRT4ALL 2007
Javier Arroyo Méndez – Foro de Vida Independiente
De los talleres, mesas, conferencias en los que participé durante la celebración del DRT4ALL curiosamente el que me resultó más interesante fue uno de los más alejados de la domótica‐robótica‐teleasistencia. Me refiero al taller: APTRA (Adaptación de puestos de trabajo, recomendaciones y ayudas técnicas) Una aplicación web que relaciona puestos de trabajo, “discapacidades” y ayudas técnicas.
Desde mi punto de vista es una herramienta que puede contribuir a disminuir la distancia, muchas veces tan importante, entre las personas con diversidad funcional y el mundo laboral. Es, además, bidireccional en el sentido de que puede ser usada tanto desde la perspectiva de la empresa (departamento de RR.HH que quiere cubrir un puesto con un perfil y encuentra en la herramienta las posibles ayudas técnicas que debe suministrar) como desde la del trabajador (persona que localiza puestos de trabajo desarrollados por individuos en similares circunstancias)
A pesar de que un congreso sobre domótica, robótica y teleasistencia no parece el sitio indicado para hablar de la relación entre la diversidad funcional y el trabajo creo interesante analizar por qué fue este taller particular el más interesante para mí: porque responde a una inquietud o necesidad actual mía. Y este es un punto que no siempre se cumplió en los talleres a los que asistí. Bien es cierto que no soy el usuario universal, que existen muchas realidades diferentes pero me encontré con algunos talleres que me parecieron evaluables únicamente como ejercicios de diseño o técnicos. Alejados de casi cualquier usuario potencial.
El hecho de que un robot sea bueno llevando a cabo tareas mecánicas y repetitivas no implica que un usuario prefiera ejecutarlas él mismo, caso de poder hacerlas, o que las realice una persona por él, mejor que un robot, caso de no poder. “Demos a los usuarios la oportunidad de elegir” se planteó durante la mesa de usuarios en la que participé. Y si, claro, bien que podamos elegir. Pero, en mi opinión, un 99% de los usuarios prefiere un contacto humano para determinadas actividades. ¿Merece la pena la inversión en tiempo y recursos para desarrollar automatismos para dichas actividades? No quiero con esto decir que deban despreciarse las ayudas técnicas. Muy al contrario un correcto uso de las mismas es capaz de proporcionar una mayor autonomía al usuario. Entonces, ¿cuáles si, cuáles no?
Es difícil dar una respuesta. Las necesidades cambian según el usuario e, incluso, para un mismo usuario evolucionan con el tiempo. En este sentido serían interesantes soluciones
178

sencillas (fácilmente descartables) para pequeños problemas concretos más que grandes soluciones globales.
Se habló mucho durante la mesa de los usuarios del slogan del congreso, diseño para todos, de que los usuarios debían poder elegir. Yo situaría al usuario al comienzo mismo del proceso de diseño: en la génesis de la idea a desarrollar, planteando a los técnicos cuáles son sus necesidades y discutiendo con ellos posibles alternativas.
EL USUARIO DE LAS TIC: FACTORES HUMANOS Y CONSIDERACIONES ÉTICAS
Mario Toboso Martín15 ‐ Departamento de Ciencia, Tecnología y Sociedad, Instituto de Filosofía, CSIC
Como asistente a este II Congreso de Domótica, Robótica y Teleasistencia para todos, DRT4all, una de mis primeras impresiones, imagino que compartida por el resto de los asistentes, es una cierta desazón amable por no haber podido asistir a todas sus conferencias, talleres, experiencias y presentaciones, dada la simultaneidad con la que se han venido desarrollando en distintas salas a lo largo de sus sesiones de tarde.
En la base de esa “desazón”, entre comillas, está la notable calidad que uno es capaz de adivinar en todos los trabajos presentados, y que, personalmente, he podido comprobar en aquellos casos a los que he podido asistir. Pienso que, en nuestro conjunto, todos los asistentes podemos dar fe de lo que aquí menciono. Es una gran suerte poder asistir a un evento de estas características, tan intenso y rico en su contenido, en el que en un breve espacio de tiempo (dos días y medio) puede uno tener contacto, aunque sea de manera tangencial, con numerosas propuestas tecnológicas “de frontera”, como suele decirse. Creo, por ello, que es muy justo felicitar a todos los ponentes y también a la organización, a través de los comités científico, asesor y organizador de este Congreso.
Como usuario potencial de algunas de las propuestas presentadas, lo primero que salta a la vista es, como digo, la notable calidad de las mismas y su esfuerzo en términos de avance tecnológico incesante, de superación de dificultades en su desarrollo e implantación, y especialmente su aproximación, cada vez más evidente y acertada, a la realidad y a las características humanas propias de las personas con diversidad funcional. Este último es, en mi opinión, el aspecto fundamental e irrenunciable que de manera implícita, o explícita (como sería más deseable), debería servir de guía a todas las investigaciones, y en torno al cual gira mi exposición.
Los “factores humanos” deberían estar tan presentes sobre la mesa de trabajo de los investigadores como los elementos tecnológicos que ensamblan para dar forma a las distintas aplicaciones y dispositivos de apoyo. Estos factores humanos recogen el conocimiento acerca de las capacidades de las distintas personas, con el objetivo de hacer los productos y servicios más eficientes, más seguros y más fáciles de utilizar. Se trata de aspectos fundamentales que, desde el punto de vista de los usuarios, tienen gran relevancia en su encuentro con las tecnologías de la información y las comunicaciones. Una pieza básica dentro de estas consideraciones es, sin lugar a dudas, la “interfaz de usuario”.
15 Investigador postdoctoral, contrato I3P financiado por el Fondo Social Europeo.
179

Desde sus primeros diseños rudimentarios, en la década de los años 60, hasta las modernas interfaces que utilizan técnicas de inteligencia artificial para conseguir la adaptación automática al perfil del usuario, el camino ha sido largo, si bien en lo que respecta a la diversidad funcional también ha resultado clarificador, al llegar a establecerse algunas características básicas necesarias en el diseño óptimo de estas interfaces, como son la “accesibilidad” y la “usabilidad”. La primera remite al conjunto de propiedades que un producto o servicio debe incorporar, de manera que el mayor número posible de personas, y en el mayor número posible de circunstancias, pueda acceder a él y utilizarlo. 16
17
La usabilidad se refiere a la efectividad, eficiencia y satisfacción con la que usuarios específicos, en un entorno particular, pueden alcanzar unos objetivos concretos. En el campo de las TIC hace referencia generalmente a la facilidad de uso que ofrece cierto producto o servicio.
Un ajuste más fino de estas dos características básicas introduce las nociones de “naturalidad” y “adaptabilidad” en el diseño de las interfaces de usuario. La comunicación de los usuarios con los productos y servicios debe aspirar a ser lo más natural posible, utilizando para ello modalidades habituales de la comunicación humana, como el reconocimiento del habla, de los gestos, etc. También debe ser adaptable, en el sentido de que las interfaces puedan adaptarse automáticamente a las preferencias y capacidades específicas de los usuarios, sin limitar su capacidad de control sobre los dispositivos.
Un caso notable de estas características finas se ofreció en este Congreso, de manera ejemplar, en el taller presentado por el profesor Teodiano Freire, del Departamento de Ingeniería Eléctrica de la Universidad Federal do Espírito Santo, de Brasil, sobre “Desarrollo de interfaces para personas con discapacidad basadas en señales EMG y EEG”, en el que pudimos ver cómo la comunicación persona‐máquina se realizaba a través de patrones de señales biológicas del propio usuario. ¿Cabe mayor naturalidad que interactuar con los dispositivos por medio del “pensamiento”, dicho en sentido metafórico? En este taller se puso de manifiesto, además, que los desarrollos tecnológicos de vanguardia no requieren necesariamente costosísimas inversiones, sino que pueden llevarse igualmente a buen fin en condiciones de bajo y medio coste; sin duda, una enseñanza muy interesante sobre el valor de las ideas y del talento aplicados a la democratización de la tecnología. Si consideramos el “diseño para todos” como la estrategia para diseñar productos y servicios que, sin necesidad de llevar a cabo una adaptación o diseño especializado, sean utilizables por el mayor número posible de personas, con independencia de su edad, talla o capacidad, 18 añádase también “con independencia de las posibilidades económicas y de financiación del entorno científico que lo produce”, y tendremos diseño para todos en estado puro.
Volviendo a la ortodoxia, existe el convencimiento de que las modificaciones que se realizan para mejorar la accesibilidad de cara a las personas con diversidad funcional benefician al conjunto total de los usuarios. Aun así, no es difícil caer en la cuenta de que, a causa de la gran diversidad humana, la idea de diseñar productos y servicios válidos para absolutamente todas las personas roza la utopía. En este sentido, seguramente resulte aprovechable un giro
16 Nordic Guidelines for Computer Accessibility, 1998: http://trace.wisc.edu/docs/nordic_guidelines/nordic_guidelines.htm 17 ISO 9241‐11, “Guidance on Usability”. 18 Ekberg, J., “Un paso adelante, Diseño para Todos”, Proyecto INCLUDE. CEAPAT‐IMSERSO, Madrid, 2000.
180

terminológico y conceptual del diseño para todos hacia la idea, más ajustada a la realidad, de “diseño para la diversidad”. Una propuesta ésta, todavía embrionaria, concebida en el contexto del Foro de Vida Independiente.19
Además de los aspectos que tienen que ver con los factores humanos, en los que como usuarios debemos estar siempre interesados, hay otros que considero igualmente importantes, y son los que se refieren a las “cuestiones éticas” implicadas en el desarrollo e implementación de las tecnologías de la sociedad de la información, especialmente en el ámbito de la diversidad funcional.
De acuerdo con el informe de 2001 de la UNESCO,20
21
sobre ética de la sociedad de la información: “los valores afectan también a las tecnologías y, por tanto, es necesario considerar dichos valores, incluso cuando se trate aparentemente de características técnicas de sistemas y productos.”
Me sorprendió gratamente, en este sentido, que en el taller presentado por Miguel Ángel Valero, del Departamento de Ingeniería y Arquitecturas Telemáticas de la Universidad Politécnica de Madrid, sobre “Hogar Digital Accesible” se tratasen de manera explícita estas cuestiones. Allí se habló, evidentemente, de la privacidad en el marco de esta aplicación, de la evitación de amenazas para la intimidad de los usuarios, del derecho de los mismos al control, a la autonomía y a la integridad de la información que manejan. También de la fiabilidad de los dispositivos tecnológicos implicados, en relación con la confianza percibida en el servicio que ofrecen y, por supuesto, de la seguridad de los dispositivos respecto a la no‐ocurrencia de eventos imprevistos que amenacen la salud o la vida humana.
Igualmente, como era de esperar (y de desear), la exposición de los aspectos éticos ligados al uso de las tecnologías tuvo también una presencia amplia en el taller presentado por Torbjorn Sund y Alejandro Rodríguez Ascaso, de ETSI, sobre “Experiencias de usuario en servicios de teleasistencia”.
La relevancia de las cuestiones éticas en el ámbito de la tecnología se plasma, de hecho, en contenido del VII Programa Marco de la Unión Europea. Dentro de su programa específico denominado “Capacidades” encontramos una línea de acción dedicada a obtener una mejor comprensión del lugar de la ciencia y la tecnología en la sociedad, a través, precisamente, de la investigación de los aspectos éticos relacionados con las mismas.
A modo de conclusión, la sociedad de la información se compone de una mezcla muy compleja de productos y servicios que aspiran a mejorar la comunicación humana y el acceso necesario a la información. Además de ello, deberían ir dirigidos a mejorar la calidad de vida y el bienestar, de manera particular en el caso de las personas susceptibles de ser discriminadas en su acceso por motivos de diversidad funcional. A este respecto, tener en cuenta los factores humanos y las consideraciones éticas en el diseño e implantación de tales productos debería contemplarse como una condición indispensable para el respeto de la dignidad, entendida
19 http://www.forovidaindependiente.org 20 http://unesdoc.unesco.org/images/0012/001248/124896e.pdf 21 La consideración de los “valores” como elementos relevantes de la práctica científica y tecnológica es objeto de estudio dentro de la denominada “axiología de la ciencia”. Puede consultarse, al respecto, Echeverría, J., Ciencia y Valores, Destino, Barcelona, 2002, y La revolución tecnocientífica, FCE, Madrid, 2003.
181

como una cuestión de derechos humanos, que involucra tanto el valor inherente de todas las personas como su igualdad de derechos.
CONCLUSIONES DE LOS USUARIOS
Jorge Sánchez Solano. Coordinador del Área Nuevas Tecnologías Fundación CNSE para la Supresión de las Barreras de Comunicación
Después de asistir durante los pasados días al II Congreso DRT4all: Domótica, Robótica y Teleasistencia, es obligado comenzar estas conclusiones agradeciendo a la Fundación ONCE su iniciativa de realizar una segunda edición de este congreso tras la primera edición hace dos años, así como por la buena organización del mismo. Del mismo modo, quiero agradecer también la invitación realizada a la Confederación Estatal de Personas Sordas y a su Fundación a participar en el congreso y, de forma particular, en este panel de conclusiones de los usuarios. Finalmente, un último agradecimiento a la Fundación ONCE por atreverse a que seamos nosotros, los usuarios, los que, de alguna manera, cerremos este congreso con nuestras conclusiones.
Más que centrarme de forma exclusiva en las necesidades que el colectivo de personas sordas tienen en relación a la Domótica, la Robótica y la Teleasistencia, como hiciera en este mismo panel de usuarios en la primera edición de este congreso hace dos años, me gustaría exponer unas conclusiones de carácter global en relación a esta segunda edición del congreso. En particular, serán cuatro las conclusiones que de forma breve exponga a continuación.
1. La primera de ellas es una reflexión acerca de la imagen que acompaña al logotipo elegido para este congreso. Al posar la mirada sobre la imagen de inmediato viene a la mente la imagen del original con la que se relaciona en la que Dios mismo hace partícipe al hombre de su vida sobrenatural por ese contacto íntimo y delicado del dedo de Dios con el dedo del hombre. De la misma manera se nos parece sugerir que en ese contacto del dedo de la máquina se transfiere vida humana a la máquina, que la máquina se ve animada por el contacto con el hombre.
Sin embargo, esto me resulta inverosímil y frío. Prefiero imaginar y creo que es el espíritu de este congreso, que es el dedo de un ser humano el que entra en contacto con el dedo del otro ser humano y es ahí donde realmente se genera esa auténtica vida que es capaz de animar la realidad circundante, que es capaz de crear, de inventar, de hacer que surja esa máquina que ahora ya, sí, tiene sentido. Porque nadie quiere vivir acompañado por una máquina por muy animada que esta sea. Queremos y necesitamos tener cercano al otro, y es ahí donde la máquina, la tecnología tiene sentido.
Quiero decir con esto, por un lado, que la Domótica, Robótica y Teleasistencia no son un fin por sí mismas, sino que su finalidad es conseguir que mi mano sienta la cercanía, el contacto de la mano de los demás. Y, por otro lado, que, como se ha visto a lo largo del congreso, nuestros proyectos, nuestras investigaciones, cobran vida, calor humano, cuando los usuarios son tomados en consideración no como menos evaluadores o
182

testadores, sino como esa otra mano con la que queremos entrar en contacto para generar una vida común.
2. La segunda conclusión está relacionada con el lema del congreso: “Un escaparate de futuro abierto al presente”. Vistas las conferencias y los talleres mostrados durante el Congreso, qué duda cabe que ha habido un importante avance en los últimos dos años, junto al trabajo de otros muchos años precedentes, en lo que a legislación, normativa, servicios y logros se refiere.
Sin embargo, creo que no me equivoco al afirmar que todos pensamos que en el momento presente esto es insuficiente, que ese “futuro abierto al presente” no acaba nunca de llegar, que el momento presente se nos escapa instante a instante sin que podamos impedirlo y sin acabar de lograr lo que deseamos, lo cual a veces puede llenarnos de frustración o de desánimo.
Por eso creo que, una vez concluido el congreso y fruto de la dinámica del mismo, el lema se reescribe automáticamente por sí solo como: “Un escaparate hacia el futuro abierto desde el presente”, pues, efectivamente se vislumbra un horizonte esperanzador, aunque no exento de trabajo.
3. La tercera conclusión es de todos sabida, pero a veces, por evidente, obviada. Llorenç Sabate nos recordaba al hablar en su exposición sobre “Materiales de aprendizaje para todos” que si queremos hablar de verdad de un entorno accesible en el entorno universitario debe garantizarse la accesibilidad tanto en el campus, como en los materiales didácticos, como en las propias pruebas de evaluación o exámenes. Y algo similar nos decía también Julio Lorca al hablarnos del “e‐bienestar para la diversidad” y su relación con la creación del “Instituto de Innovación para el Bienestar Ciudadano”.
Es decir, la Domótica, la Robótica y la Teleasistencia tienen que caracterizarse por facilitar entornos accesibles globales y no reducidos únicamente a determinados ámbitos espaciales, geográficos o personales.
En este sentido, como decía Cristina Rodríguez Porrero, hay que seguir creando cultura, formando, demostrando e incentivando.
4. Finalmente, una última conclusión en relación al colectivo de personas sordas. A lo largo del congreso se ha puesto de manifiesto cómo es necesario contar con la presencia de intérpretes de lengua de signos así como de subtitulado si se quiere que el colectivo de personas sordas, en su gran heterogeneidad, tenga acceso a la información y a la comunicación en igualdad de condiciones que el resto de los ciudadanos de la sociedad. Por eso quiero dar las gracias pública y explícitamente a la Fundación ONCE y a los organizadores por contar con los recursos humanos y técnicos para ello.
Por ello mismo se hace evidente que todos los servicios prestados que no tengan en consideración estos canales de comunicación serán inaccesibles para las persona sordas. En particular, en el caso que nos ocupa, mientras que en los servicios de teleasistencia no se implanten protocolos que contemplen canales de comunicación
183

distintos al de la voz éstos serán inaccesibles para las personas sordas. Lo mismo sucede en todo lo relativo a la Domótica: mientras no englobe las características visuales y comunicativas propias de las personas sordas no estaremos hablando de diseños domóticos para todos. Y en este sentido me gustaría destacar muy especialmente como elemento singular de la Domótica la televisión digital, la cual, mientras no garantice la emisión de contenidos en lengua de signos y con subtitulado será una televisión digital excluyente y en absoluto diseñada para todos.
LAS NECESIDADES ESPECÍFICAS DE CADA GRUPO DE USUARIOS
Elías Morán de la Torre. Instructor de Tiflotecnología y Braille. Centro de Investigación, Desarrollo y Aplicación Tiflotécnica (CIDAT). Organización Nacional de Ciegos Españoles (ONCE).
En primer lugar, deseo manifestar mi más sincero agradecimiento a la organización de este II Congreso de Domótica, Robótica y Teleasistencia por la oportunidad de participar en el mismo que me vuelve a brindar.
A lo largo de estos dos últimos días y medio de apretado programa que nos ha obligado a optar a la hora de elegir entre la asistencia a uno u otro de los distintos eventos que se celebraban en paralelo, he tenido la oportunidad de aproximarme de nuevo al estado actual de estas ramas de la Ciencia y la Tecnología orientadas a un sector de población con unas necesidades vitales muy concretas: el de los usuarios con diversidad funcional.
No voy a exponer cuáles de las exposiciones a las que he podido asistir me han parecido más o menos interesantes porque considero que podría resultar una visión demasiado parcial. Me voy a limitar a plantear algunos puntos de vista que en este Congreso se han vuelto a ver reforzados.
La exposición que han presentado las representantes de la Administración Pública y de la Unión Europea nos han ayudado a conocer lo que son y lo que hacen ambas entidades. Sin embargo, la percepción que se nos queda a los llamados “usuarios finales” es que “aún queda mucho por hacer”. Mi experiencia personal, sobre todo en lo que atañe a la participación de los usuarios en los proyectos, tanto nacionales como europeos, es que en no pocas ocasiones se ponen en marcha con mucha ilusión y, poco a poco, por razones muy diversas, se van deshinchando o se pierden en farragosos procesos de seguimiento, evaluación y control que los ralentizan o llegan incluso a detenerlos. En lo que atañe a los usuarios finales, se cuenta con ellos para los paneles de usuario y poco más. Su intervención es la de evaluadores que toman conocimiento con los productos de los proyectos en fases demasiado avanzadas como para que muchas de sus ideas sean determinantes o puedan ser tenidas en cuenta.
Considero muy interesante la exposición acerca de la accesibilidad a los videojuegos para discapacitados visuales que ha presentado Monsieur Archambault. En relación a este punto megustaría hacer un llamamiento sobre dos cuestiones: La primera es la conveniencia de abordar proyectos que faciliten la integración social de las personas con necesidades especiales. Aunque pueda parecer paradójico e incluso superfluo, el hecho de disponer de herramientas (en este caso juegos o programas) susceptibles de ser empleadas por grupos de
184

185
personas con diferentes niveles de necesidades sirve para aproximarlas entre sí y tomar conciencia de ellas mismas, facilitando su interrelación social. El segundo aspecto está relacionado con el primero. Se trata de aprovechar las sinergias que surgen de la comunicación entre las entidades que agrupan a las personas con necesidades especiales, los organismos que se encargan de la investigación y el desarrollo de los productos orientados a estas personas (universidades y empresas) y las administraciones que facilitan el marco legal y administrativo para el desenvolvimiento de esta función.
No se debe olvidar los condicionantes sociales actuales, sobre todo el envejecimiento de la población, que modifican sus necesidades vitales. Considero que, ni las entidades públicas ni las privadas deben olvidar esto porque puede servir para potenciar productos y servicios nuevos, tanto tecnológicos como humanos, que pueden tener repercusiones económicas nada despreciables. Como ejemplo, se puede citar la accesibilidad a los entornos urbanos o a los portales de comercio electrónico. Sólo hace falta asomarse a cualquiera de nuestras calles para darse cuenta de los problemas que una persona con necesidades especiales experimenta para desplazarse, hacer la compra, ir al trabajo o disfrutar de su tiempo de ocio fuera de su casa, partiendo del hecho de que ésta reuna unas condiciones de accesibilidad suficientes, algo que no necesariamente ocurre.
Quiero reiterar un punto que ha sido expuesto por otros compañeros de este Panel: la necesidad de no abandonar el factor humano sustituyéndolo por el tecnológico. Aunque la tecnología nos ayuda mucho a las personas que tenemos necesidades especiales, resulta incierta su capacidad para cubrirlas.
Los modelos sociales actuales nos llevan a formas de vida disgregadas e independientes, basadas en la autosuficiencia del individuo, en las que éste debe ser capaz de desenvolverse en su vida diaria por sí solo. Así, desde necesidades básicas simples, como las derivadas del aseo, la alimentación o el desplazamiento cotidianos, hasta otras más específicas, tales como la educación, el desenvolvimiento profesional y laboral, la cultura o el ocio, requieren el empleo de recursos que no siempre están al alcance de los grupos con necesidades especiales ni son susceptibles de cubrir en su totalidad por la tecnología sin recurrir al factor humano. Precisamente en varios eventos de este Congreso se ha hecho un llamamiento a no descuidar el segundo por la primera y se ha puesto de manifiesto, sobre todo en el sector de la Teleasistencia, que ésta es la línea adecuada de evolución.
Finalmente, me gustaría aprovechar esta oportunidad para hacer un llamamiento a todos los sectores implicados en este Congreso, Organizadores, patrocinadores, participantes y asistentes, para que intentemos todos reducir a la mínima expresión las barreras, por desgracia no todas ellas tecnológicas o funcionales, que contribuyen a hacer difícil la posibilidad de vivir cada día en una sociedad más normalizada.

Iniciativas nacionales para fomentar la inclusión de todas las personas en la sociedad de la información y el
conocimiento
Wendy Moreno Moviquity
El objetivo de la Plataforma Española de Comunicaciones Inalámbricas (eMOV) es contribuir al fortalecimiento de los agentes que intervienen en el desarrollo de sistemas y servicios móviles e inalámbricos. Esto ha de repercutir finalmente en:
• ‐la mejora de la posición económica que el propio sector representa, en cuanto a creación de empleo y generación de riqueza;
• la mejora del impacto que la adopción de este tipo de sistemas y servicios tiene en otros sectores y en la sociedad española en general, en términos de productividad y bienestar.
La Plataforma está desarrollando una serie de acciones para determinar la estrategia y la dirección de la Investigación y el Desarrollo Tecnológico en el campo de las comunicaciones móviles e inalámbricas en este país:
• Identificación de los agentes que son relevantes para el desarrollo de las comunicaciones móviles e inalámbricas y de sus prioridades en materia de Innovación;
• Identificación y coordinación de iniciativas nacionales e internacionales que se están desarrollando en materia de Innovación que contribuyan en el logro de los objetivos de la Plataforma eMOV.
Otra de las acciones llevadas a cabo dentro de la plataforma, son las realizadas por los diferentes grupos de trabajo creados según tipo de actividades. A continuación presentamos el grupo e, liderado por MOVIQUITY y dirigido al área de accesibilidad e inclusión.
Descripción del grupo de trabajo e, Tecnologías para la accesibilidad:
El grupo de trabajo de tecnologías para la accesibilidad tratará aquellas tecnologías móviles e inalámbricas que permitan ofrecer soluciones integradas a todos los ciudadanos, con especial interés en aquellos grupos con necesidades específicas (personas mayores, con alguna discapacidad, etc), para que ellos también entren a formar parte activa en la sociedad de la información, disminuyendo así la brecha digital existente en la actualidad y ofreciendo una mejora en la calidad de vida de estas personas.
187

Por tanto, el objetivo de este grupo de trabajo es ser un punto de encuentro y discusión para servir como embrión de futuras ideas y proyectos tecnológicos para cualquiera de las convocatorias nacionales, autonómicas o europeas donde el objetivo principal sea avanzar en las áreas de e‐Inclusion: accesibilidad y diseño para todos.
Posibles aplicaciones:
• Servicios de carácter asistencial y para la salud.
• Servicios de e‐formación
• Servicios de entretenimiento, etc.
Estado actual del sector de aplicación:
La accesibilidad es considerada como un área temática en la que, a pesar de los avances conseguidos hasta ahora, aún queda mucho por avanzar. De hecho, la accesibilidad actualmente es considerada como uno de los temas de interés en diferentes programas de investigación y desarrollo tanto europeos como nacionales, en los que se abarcan diferentes sectores como la salud, formación, entretenimiento, etc.
Caso práctico, proyecto europeo: Tele asistencia a pacientes cardiacos, "For ALL".
FOR ALL Description
Overall Project
e‐TEN is an European Community programme that provides funds to help make e‐services available throughout the European Union. This programme helps to stimulate the deployment of innovative, trans‐European e‐services of social or economic interest, funding part of the deployment cost, for the initial rollout of a new service or funding part of the cost of the market validation for a service, showing its technical and economic feasibility and benefit to end‐users.
FOR ALL project is a e‐TEN project, aimed to perform the market validation at trans‐European level of an existing pilot system deployed in Italy called ICAROS (Integrated care vs. Conventional intervention in cArdiac insufficiency patients Randomized Open label Study), which monitors and manages (using PDA's and mobile technology) heart chronic disease patients in their daily life, offering cardiologic and psychological assistance with an all‐time and all‐place on‐line mobile trans‐European service. The pilot system produces real‐time reports to support clinical decision‐making and aggregates data for use in setting best practice guidelines, managing clinical outcomes and staff training.
188

FOR ALL service will allow thus an integrated management (cardiac and psychological) of cardiologic patients every time and everywhere, making easy and continuous the interaction between patients and hospital personal using wireless and Internet technologies.
During the project, three main trial groups constituted by Istituto Auxologico Italiano (Italy), Consorci Sanitari de Terrassa (Spain) and National Kapodistrian University of Athens, Department of Radiology (Greece) will try the pilot service implemented in the FOR ALL market validation phase. Feedback will be reported with further conclusions for the exploitation and the further development of the service, should the viability be confirmed.
There is a clear challenge: to deploy this service through the previously described existing pilot application that needs to be customised for a trans‐European service approach. The adaptation will be done by the technological partners taking advantage of the high specialisation of NOEMALIFE and MOVIQUITY in mobile technologies applied to health and system integration, and ALTEC in system integration.
The trans‐European service will be provided initially for 3 languages (Spanish, Italian and Greek) by the consortium and if the service goes to the deployment phase other remaining European Organisations and Institutions will be invited to join creating the concept of a common trans‐European service.
Some important characteristics of FOR ALL service are that it:
• provides a mobile, all‐time/all‐places, continuous management and monitoring service to support to those citizens who are suffering from heart diseases and any psychological consequence of it such as depression, stress, anxiety and so on;
• provides a trans‐European service which enables to monitor citizens and patients under these circumstances, even if they are abroad from their home country, preventing further pathologies in their heart diseases and its consequences;
• promotes health and improves the prevention of illnesses, in particular, in cardiologic affected citizens;
• reduces costs and improves cost‐efficiency of public and private healthcare systems and organisations by detecting in advance and preventing CVD and other illnesses with a high rate of morbidity;
• improves the statistical data from illnesses affecting certain groups of patients and pathologies by improving data capture and access, thus improving access to cross‐border healthcare records through the use of
o electronic health records;
o cost‐efficient healthcare and support of health authorities in assessing health needs and planning capacity.
Finally, we can summarize saying that FOR ALL addresses a service in the area of e‐Health and advanced mobile services, and helps to overcome the existing barriers (financial and social)
189

FOR ALL Service
FOR ALL is based on ICAROS, which is an existing pilot service in Italy to monitor and manage remotely patients suffering cardiologic disease. It is going to be market validated at trans‐European level, since this service offers notorious improvements22 in patient’s quality of life, economic cost management and also reduces risk factors linked to cardiac disease.
In this service, PDA’s are used to daily send patient’s vital parameters (blood pressure, liquid intake, diuresis, weight). These data are analysed and in case parameters are outside of specific ranges, patients are contacted by phone immediately to discuss their condition and get medical assessment from the paramedical staff that is in charge of monitoring. Cardiologists are alerted immediately when parameters show a condition which may be at risk. Furthermore, patients get an alert on the PDA at the specific time of the day that they have to take their prescriptions.
Besides cardiologic monitoring, the service offers psychological support to these patients. Periodically, patients receive via the PDA questionnaires that aim to evaluate their psychological status. it is important to notice that besides their heart problems, patients suffering cardiologic diseases often feel shock, fear and anxiety over their condition. They may have difficulty accepting their condition and this may lead to depression as well as confusion in selecting the best course of treatment. Heart patients therefore need generous amounts of guidance and support from their healthcare professionals to assist in their recovery process. That is why FOR ALL, besides cardiologic care, is also focus on psychosocial healthcare, helping to prevent relapse and alleviate their psychological difficulties until they, either overcome gradually those extreme situations, or they are cured or undergo a further medical treatment.
Thus, data are sent to an online database that allows monitoring patients’ medical and psychological conditions. Similarly, psychological parameters are compared to normative values and if patients show a clinically significant level of anxiety and/or depression, the psychologist in charge of monitoring contacts the patient by phone; after an initial assessment on the phone, decides together with the patients whether it would be advisable to schedule a meeting.
If it is not necessary to schedule an encounter, the psychologist reassures the patient and states his/her availability for further discussion of matters that may be important to the patients regarding their medical and/or psychological condition.
FOR ALL service will allow physicians to detect depression and anxiety and allows heart disease treatment by professionals, who monitor the patient's condition and manage individual outcomes. The system produces real‐time reports to support clinical decision‐making and
22 ICAROS received national prize from the Italian Ministry of Health :”Prize for the innovation in sanitary services”, Rome 2005.
190

aggregates data for use in setting best practice guidelines, managing clinical outcomes and staff training.
FOR ALL Users
Final Users of the service will be those citizens who by one or other circumstances (age, sex, lifestyle, etc.) are affected from CVD and its psychological consequences, at the rational for the provision of service has been listed some figures on possible final users of the service and as it is highlighted the number of final users is really high and growing day by day.
Therefore, final users of the system will be:
• Patients with cardiac disease after first hospitalization with sufficient informatics abilities (patients will need to interact with a PDA. That is why a training service is foreseen within the project, to get users acquainted with service functionalities).
• Medical personnel (cardiologists, nurses) and psychologists that are involved in care management of the patient. (Also this personnel will be trained to manage the service)
On the other hand we can list as providers of the service organisations such as:
• Public and Private health organisations
• Hospitals
• Insurance Companies
The providers of FOR ALL service will specify the customisations needed for trans‐European validation of the service, adapt it –with the support of the technological partners‐ to the new needs of the trans‐European scope of the service, and will perform the trial in order to assess and give feedback on the service operation for the deployment phase.
We can summarize saying that FOR ALL service is addressed to enhance, complement and upgrade present cardiologic care and support services as well as its psychosocial consequences, and because these services are being considered more and more important for Health and National Administrations, this service has a strong potential for launching at trans‐European level the Deployment Phase after finishing the market validation phase.
Project Brochure
In this brochure it has been collected the more significative information about FOR ALL project, as well as the consortium members and the web site are reflected.
191

Figure 1. Images of the Brochure, Front and Back respectively
Project Web
It has been created in order to present to general people information about the project, the context in which it is going to be developed, the main goals, the consortium members, the work plan, the public documentation generated, the events related to the project, and that kind of issues.
Besides, it has been developed a private area, which will be used by the Consortium for internal communication, as the main way for interchange of files and documents. Also, this restricted area will allow a better organization and management of the documents created.
http://forall.moviquity.com
192

The role of evaluation of accessibility
Leonor Moniz Pereira
Interdisciplinary Centre for the Study of Human Performance Faculty of Human Kinetics / Technical University of Lisbon
Introduction
CIPER (Interdisciplinary Centre for the Study of Human Performance) is a research centre, of the Faculty of Human Kinetics of the Technical University of Lisbon, aiming at to develop and promote multidisciplinary approaches to the study of human development and functioning, or adaptation.
Our research model is based on the human performance model (Bailey, 1989), human activity assistive technology model “HAAT” proposed by Cook & Hussey (1995), on the International Classification of Functioning, Disability and Health model (ICF) developed by WHO (2001) and the Human Functioning Model proposed by AAIDD (2007).
Participation Interaction
Social Roles
ActivitiesAdaptive Behavior
Personal Abilities
Mainstream Technology
Assistive Technology
SupportsSupports
Research model
SettingHome
EmploymentSchool
Community
Social ContextsPhysical ContextsContextContext
AUTONOMY
Functioning is a key concept for the study of autonomy providing important information concerning evaluation of people daily living activities and to understand their performances. It may also help to assess and to establish individual rehabilitation plans.
193

Objectives and methods
Our main goal is to facilitate the function of elderly people or of people with disabilities in their daily environment, to increase their autonomy, reducing the disabling effect of impairments. This may be achieved through individual training, by the lowering of task requirements for social and cultural participation or by promoting accessibility. In fact, accessibility may act as a facilitator of the interaction of elderly and disabled people with their environment, creating new possibilities to their autonomy and social participation.
We aim to fulfil the gap between personal abilities, activities or tasks requirements and social participation by developing intervention methods acting as facilitators of social inclusion and participation, which may include assistive or mainstream technology to support their performance, their interaction or social role.
With our research program we aim also to identify barriers to social interactions related to communication and to mobility caused by attitudes, equipment, products and services accessibility and to propose solutions, based on non intrusive intervention methods and support models etc.
One of our goals is to assess activities limitations that might influence daily life of people with disabilities; i. e. to identify the activities and the level of participation through the identification of limitations in functioning and autonomy. We are using a transdisciplinar model to define the adequate supports for that population to overcome its difficulties in the adaptation to society.
In order to identify the needs of elderly people and of people with visual, motor or cognitive impairment; and the accessibility role to improve their autonomy, along the years our research programme generated a set of questions:
• Which are the activities limitations and participation restrictions imposed by equipment, products and services design?
• Which environmental barriers may be avoided?
• How technology may improve services and support models, to expand elderly or disabled person’s autonomy and their possibility to live at home in their community, avoiding the need of a sheltered home?
• What are the attitudes and the acceptance towards technology of the support team and of elderly people and people with disabilities for the support of their autonomy?
To answer to those questions an inclusive approach is used focusing on the following work areas:
• The identification of priority needs and areas of intervention related to autonomy and independent living of elderly and disabled people.
• The impact study of how technology may improve the performance of activities and quality of support services.
194

• The development and validation of evaluation instruments.
• The study of accessibility of mainstream technology, like public terminals, its influence in performance, autonomy and social participation.
• The production of recommendations for good practices, follow up and future issues.
For the development of these working areas, and to check data consistency, combinations of quantitative and qualitative methods are used namely: interviews, questionnaires, focus groups and observation of user performance.
Using the Human Functioning Model proposed by AAIDD (2007) a Core Set of categories from ICF has been chosen to study autonomy and independent living in three major settings: home, school or day centre, and community. In each of these settings the work was divided into two big areas: the interaction with different equipments and the interaction with others. So, our studying Core Set is composed by the following categories of ICF classification:
• From part 1 (Impairments of Body Functions):
b1. MENTAL FUNCTIONS
b114 Orientation (time, place, person)
b140 Attention
b144 Memory
b156 Perceptual functions
b2. SENSORY FUNCTIONS AND PAIN
b210 Seeing
• From part 2 (Activity Limitations & Participation Restriction):
d1. LEARNING AND APPLYING KNOWLEDGE
d110 Watching
d2. GENERAL TASKS AND DEMANDS
d210 Undertaking a single task
d3. COMMUNICATION
d310 Communicating with ‐‐ receiving ‐‐ spoken messages
d315 Communicating with ‐‐ receiving ‐‐ non‐verbal messages
d325 Communicating with ‐ receiving – written messages
d330 Speaking
195

d350 Conversation
d360 Using communication devices and techniques
d4. MOBILITY
d430 Lifting and carrying objects
d440 Fine hand use (picking up, grasping)
d455 Moving around
d460 Moving around in different locations
d465 Moving around using equipment (wheelchair, skates, etc.)
d8. MAJOR LIFE AREAS
d860 Basic economic transactions
• From part 3 (Environmental Factors):
e1. PRODUCTS AND TECHNOLOGY
e115 For personal use in daily living
e120 For personal indoor and outdoor mobility and transportation
e125 products and technology for communications
e3. SUPPORT AND RELATIONSHIPS
e310 Immediate family
e325 Acquaintances, peers, colleagues, neighbours and community members
e360 Health related professionals
e4. ATTITUDES
e410 Individual attitudes of immediate family members
e425 Individual attitudes of acquaintances, peers, colleagues, neighbours and community
e440 Individual attitudes of personal care providers and personal assistants
e455 Individual attitudes of health related professionals
196

An example
As an example of our work and how accessibility can influence autonomy we have chosen the ATM Project. This project was sponsored by SIBS (Portuguese Inter bank Society) developed by a multidisciplinary team, from different schools of the Technical University of Lisbon, namely:
• António Cordeiro e Manuel Ribeiro from the Faculty of Architecture,
• Leonor Moniz Pereira and Cristina Espadinha from Faculty of Human Kinetics
• and João Brisson Lopes e Mário Rui Gomes from the Institute of technology.
In Portugal the ATMs network has some unique singularities that influence our methodological choices. For instance, the SIBS network provides a network of more than 10.250 On Line ATMs, including all the national territory and connecting all Banks operating in Portugal, providing a service far beyond the traditional Cash Dispenser with credit cards. That is to say, more than simple ATMs, SIBS provide a popular Network of Public Interfaces.
These machines, in Portugal, provide the standard financial operations (like, cash dispenser with single debit cards, account situation and latest movements) or more complex financial operations (like money transfer between accounts of any bank or deposit of values in check or notes). Furthermore, offers a large set of other services as payments (telephone, energy, water supply, public services, insurances, credit cards, taxes, traffic fines, and so on), and ticket vending (cinemas, concerts, trains, etc.). The ATM service, in our country is currently equipped with two kinds of machines: “Free‐Standing” (with 5 different models) and the more widespread “Through‐the‐Wall” (with 6 different models).
To achieve equal opportunities to Product and Services our work was based in some background principles: the equipments should be designed taking into account all ages, different human abilities and the most demanding situations.
In order to define those situations we have chosen from ICF the following categories: d110 watching; d310; d325 (receiving a spoken and written message); d360 (Using communication devices and techniques); d440 (Fine hand use); d460 (moving around in different locations), d465 Moving around using equipment –wheelchair, cane); e125 products and technology for communications; e150 products and technology related to architecture.
However, as we are not manufactures of ATMs improvements were limited mainly to installation recommendations and software updates. Concerning hardware, with our study we just could influence the choice ATM acquisition. Thus our goals were:
• To create guidelines for the installation process.
• To identify areas of software improvement and development.
• To establish some recommendations for the acquisition of new ATMs.
To achieve those goals our work were divided into three main phases:
197

• Systematic characterization of the actual situation, by identifying the existent ATMs types, models, the installation faults and also a software analysis. To finalize this phase we identified the main constraints and barriers pointed by the users by applying interviews and questionnaires.
• Diagnosis of the Portuguese reality, by the identification of the more common barriers trying at the same time to identify the existence of conflict areas of interest between different users groups. To do groundwork for the final phase, by developing a test bed and performing its evaluation (including hardware assembly, software changes proposals and the establishment of the evaluation protocol). With this groundwork we managed to gather the users’ evaluation and the identification of user groups that might not be able still to use ATMs machines.
• Recommendations and dissemination to SIBS of one checklist to help the implementation of those recommendations.
We asked the users’ opinion in the first and second phase. In the beginning we questioned 356 persons with Intellectual, Motor, Visual Disabilities or elderly in order to make a big picture of their problems. It was interesting to observe that 206 were able to use the ATMs, 138 did not and 12 were former users but had giving up using it.
During the test bed phase we interviewed 24 elderly persons or with Intellectual or Motor disabilities and Blind persons: 18 were users and 6 were non users. These users were picked in spite that the main characteristic of impaired and elderly people is their heterogeneity, taking into account they have in common some difficulties in locating, accessing, interacting with the terminal or understanding instructions (adapted from COST 219,1989 & Gill, 1996).
The problems identified with the Portuguese ATMs accessibility can be summarized in following table:
198

Visual Impaired
(45)
Mental Impaired
(47)
Elderly (54)
Severe Problems Problems No Problems
The table shows that the motor impaired group is the most heterogenic: in the item “insert card, remove money or receipts”, due to the high location of the dispenser, if the person has arm mobility or grip problems, it may become a problematic or even impossible task to perform.
Installation problems may explain the existence of difficulties in reading the screen as pointed out by most people interviewed: glare in the screen due to sunny conditions in Portugal. Also the existence of different layouts, that vary from one ATM model to another, represent another difficulty to its usability, especially if the operations timeouts are not adequate to the person, in particular in complex tasks like payments and bank transfers.
According to the users interviews, sometimes it’s difficult, even for “normal” users to locate the terminal in an unknown environment because the equipment sometimes does not present a good contrast with its surroundings; or the sign is located in odd places. It may become an important obstacle if you have visual or motor impairments and have to walk looking around for the terminal.
But, even when the location is known, sometimes the major problems rely on how you may access the terminal. Path obstacles are a great problem in an environment, like steps as you may see in the picture. If the pathway has a lot of things to contour, or if the road has a big inclination it may affect everybody especially those with problems to move around such as the majority of the elderly, motor impaired, blind and low vision people.
Motor Impaired
(60)
Insert card, remove money or receiptsPerform complex financial tasks in time
Perform simple financial tasks in timeUnderstand /Follow Instructions
Read the ScreenUsing the keypad
Access the ATM
Locate the ATM
Motor Impaired
(60)
Visual Impaired
(45)
Mental Impaired
(47)
Elderly (54)
Severe Problems Problems No Problems
199

In summary, we may say that, the access to the terminal is still a problem due to:
• Obstructions (e.g., to wheelchairs);
• no levelled platforms;
• access platform level different from equipment level;
• reduced/no shelter from atmospheric agents;
• lack of shelves/devices to hold objects;
• insufficient lighting conditions / glare;
• reduced space for waiting queues.
• longitudinal and transverse slopes above legal limits (6 and 2%).
The following draws illustrate the technical problems presented by slopes. Houses are levelled in the interior, but outside the facades have to follow the street slope. So to access a terminal in a street with a 6º slope we may have a 70 cm difference, as it can be seen in the drawing.
200

When we are talking about interacting with the terminal, we have different problems to address, like introducing and recovering the card. To identify the place and to be able to introduce and take off the card may be a problem to blind, low vision, motor and intellectually impaired persons due to the variety of the layouts presented by the different models.
Four main reasons may explain why it may be difficult to read the screen in the time given: reading the screen does not follows the usual process from left to right from top to bottom, glare caused by the sun, and the lack of contrast and the parallax (in the photo we can observe that a monitor upgrade of the ATM causes the increase of the gap between the buttons and the screen, thus increasing the parallax error).
Also the pin‐pad used in some models leads to elderly, visually and motor impaired people to experience difficulties in pressing keys especially if they are small and near to each other.
Motor impaired people may have difficulties in reaching the touch screen or the keyboard, depending of the level where they are installed.
201

Visual and intellectually impaired people may have problems to chose the correct key specially if they have not different shapes and have not always the same position (there are still some pin‐pads with “7,8,9 numbers in the first row, instead of the “1,2,3” numbers)
Another set of difficulties is related with understanding how to operate the ATM. For instance, to choose the correct answer the elderly, intellectually impaired and low vision people, may have difficulties in selecting the correct information for the time given to perform the task required, in particular if they have to confront a multiple stimulus environment (like a busy street). Visual and intellectually impaired people may have problems to chose the correct key specially if they have not different shapes and have not always the same position, as already has been stated.
Talking about following instructions, another set of difficulties arouse, like sometimes choices presented on the screen are not clearly identified specially if you are not familiar with some of the words used (elderly, intellectually impaired, low vision people), accompanied by a lack of consistence in the feedback dialogues and the establishment of the timeouts to a “perfect performance”.
Another set of difficulties have security issues involved. Financial transactions are related with money management and everything that is related with that. Staff from professional training centres and occupational centres for Intellectually Impaired persons referred that money management skills and ATM usage are part of their training. According to the Portuguese law, it is mandatory for all Intellectually Impaired (over 16 years) frequenting Professional training programs to dispose of a bank account and a card. But their ability to manage their money is not predictive of the ATM usage or non usage because parents attitude have an important role in their ATM usage.
Another interesting point is that elderly people don't use ATMs to buy tickets because age discounts are not considered in the ticket vending option.
Concerning security all users have commented about environment issues like unsafe streets, location of ATM in bad spots (poor illumination, isolated, background noise, …). The lack of self‐confidence concerning speed errors or the misconceptions that the ATM can hold the card or the money were also stated.
To conclude we present a summary of the most important and can influence the Portuguese ATM design, namely:
• The possibility to connect audio headphones to the ATM to use the audio feedback was as an option to add security, eliminate background noise problems and it is based in mainstream technology. It may also be used as a solution to operate terminals that in some periods of the day have readability problems caused by the sun glare.
• Another solution proposed to the visual impaired group is the labeling in Braille that should be positioned with a 45º from the ATM to improve readability (Braille is read by touching the dots with the finger tips and the hand cannot be in paralleled position with the reading surface).
202

• Another problem detected in the Portuguese ATM is the presence of too much information in the receipts. We recommended as an easy solution to reorganize them with the fundamental information, thus an easier to read receipt can be produced. As a better example we can point one receipt produced in a Spanish bank. The use of a sans serif font, size 16 is recommended to be used.
• The last suggestion that we presented is the easiest way to eradicate the usability problem to those who have difficulties to use the buttons located near the screen. (To operate the Portuguese ATMs is mandatory to use those buttons.) So if the software includes a numeric code of every possible choice that needs to be done with the
screen buttons, all operations may be emulated with the pin‐pad.
203

204
This solution was part of the test bed and proved to be successful to all users with motor disabilities and having the ability to use one finger to press a key and to introduce the card.
In conclusion we may say that users, involved in the trials accepted the ATM installation in a lower position, even the taller ones. The lowered ATM installation was considered an advantage it allows to use the body as a shield against sun reflexes.
Bibliography
Cordeiro, António; Moniz Pereira, L e Brisson, Lopes (2006). Final Report of ATM project (unpublished)
Frederiksen, J. ; Martin, M.; Bellacasa, R. P.; Tetchner S. (1989) _ Use of telecommunication: The needs of people with disabilities. Telefonica: EEC DGXIII Cost 219.
Gill, Jonh (n/d), http://www.tiresias.org
Luckasson, R. et al (1992) – Mental Retardation Definition: Classification and Systems of Supports, cap. 8, pp. 93‐99 e 101‐109
Luckasson, R. at al (2007). User's Guide: Mental Retardation ‐ definition, classification and systems of supports. 10th edition. American Association on Intelectual and Developmental Disabilities
Roe, Patrick Ed. (2007) Towards an Inclusive Future: Impact and Wider Potential of Information and Communication Technologies. Brussels – COST edition
Tetzchner, S. (Ed) (1994) ‐, Telecomunicações e Incapacidade pág. 100‐119 e 421‐436, 450‐463.Lisboa: SNR
WHO (2001), ICF: International Classification of Funcioning and Disability. Geneva: WHO.

Improvement and Assessment of Motor Rehabilitation with Control Engineering Methods
Michael Bernhardt, Heike Vallery, Herman van der Kooji, Martin Buss, and Albrecht Struppler
Institute of Automatic Control Engineering
Technische Universität München
Research Group for Sensorimotor Integration
Klinikum rechts der Isar
Technische Universität München
Abstract
Two medical engineering projects will be presented that are in the field of motor rehabilitation after stroke. The first project focuses on the restitution of hand and finger movements. The concept is the generation of proprioceptive afferent input by position controlled muscle stimulation. As innovative stimulation method the Repetitive Peripheral Magnetic Stimulation (RPMS) is used.
Secondly, a novel control method (Complementary Limb Motion Estimation, CLME) for automated treadmill training for hemiparetic patients is presented. CLME deduces reference motion for the impaired limbs based on the contralateral leg. This method aims to increase the patient’s involvement and dominance during rehabilitation, while the robot acts as an assistive slave.
I) SYSTEM IDENTIFICATION BASED SPASTICITY QUANTIFICATION DURING MAGNETICALLY INDUCED MUSCLE STIMULATION
1. Introduction
A central paresis of the arm and/or hand, e.g. after stroke, reduces the quality of life dramatically. Studies on large clinical cohorts, using standard therapeutic methods, showed that approximately 90% of stroke patients have persistent hemiparesis of the upper extremities, and in 30‐40% the paresis is so severe that the affected limb can not be used any more. This data emphasizes the necessity of innovative approaches in rehabilitation of central paresis. Cortical reorganization abilities form the basis of relearning lost motor functions. In order to activate a beneficial reorganization process, the lost proprioceptive input should be reactivated. Currently, physiotherapy aims to achieve such an activation through externally applied movements. Inducing the lost movement via muscle stimulation results in a higher proprioceptive input which corresponds closer to the lost voluntary action patterns. Ultimately, this leads to an increase in the therapeutic effect [1]. In this context functional electrical stimulation (fES) is a well–known method. Though the fES activates somatosensory nerve fibers a major drawback consists of the equal activation of the cutaneous receptors.
205

Apart from leading to pain this may also result in an additional increase in spasticity. Hence, the use of fES for therapeutic purposes appears limited, see e.g. [2]. In order to achieve a deeper penetrating, focused and painless stimulation we use the new method of repetitive peripheral magnetic stimulation (RPMS) (see fig. 1).
Figure 1: Principle of RPMS application.
The repetitively applied field impulses are sinusoidal half‐waves with a fixed duration of 100μs and a variable amplitude called stimulation intensity. The maximum stimulation intensity of 100% corresponds to a magnetic flux density of approximately 2.0T. The therapeutic concept of RPMS is the activation of a reorganization process by inducing a proprioceptive input to the central nervous system (CNS), physiologically corresponding to the lost input during active movements [1, e.g.]. In clinical experimental studies [3] on spasticity, cognitive functions, cerebral activation, stiffness around the elbow joint and goal‐directed motor performances, it was shown, that the sensorimotor dysfunctions due to brain lesions can improve remarkably with the application of RPMS. Our current research focuses on the improvement and the assessment of RPMS‐therapy. Fig. 2 summarizes our main aims:
• Optimization of the proprioceptive inflow by inducing position controlled functional ovements with multiple coils.
• Time continuous tracking of patient parameters like level of spasticity and muscle atigue based on system identification.
Figure 2: Overview of the main research goals.
One important goal in treatment of central paresis is the reduction of spasticity. The evaluation of the spasticity level is essential for the individual therapy planning, for the
206

evaluation of the therapy progress and most of all for the neurophysiological research to obtain a deeper understanding of the recovery processes in the CNS. Standard methods are the modified Ashworth scale [4] or EMG‐measurements of the affected muscles. The modified Ashworth test is not objective and EMG measurements are time consuming and error‐prone. In [5] static and dynamic spasticity components are identified by measuring the torque necessary to passively move the elbow joint, and in [6] a system identification approach is introduced which is also based on torque measurements. However, to the authors’ best knowledge, a spasticity quantification during muscle stimulation without using any extra equipment like force sensors or EMG has not been introduced yet.
2. Methods
Fig 3 illustrates a simplified description of the plant. The force F generated by the stimulated muscle is transmitted via a tendon the the respective joint. The block diagram comprises the force generation and the limb dynamics. The nonlinearities N1 and N2 model the gravitational torque Fg elastic joint properties Fejp and friction F f , see eq. (1) and (2). In case of spasticity the tonic spasticity component S t and the phasic component Sp have to be added. Detailed derivations can be reviewed in [7].
Figure 3: Simplified model of the plant.
(1)
(2)
Since the only time varying components of eq. (1) and (2) are the spasticity components S t and Sph a change of spasticity can be tracked by identifying the nonlinearities N1 and N2 .
207

Figure 4: Output error configuration for identification of the plant parameters.
The plant parameters have been identified in output error configuration with a neural observer and a recursive least squares algorithm. Details can be reviewied in [7].
3. Results
In a pilot study the described approach has been tested with one patient (female, 71 years old, hemiplegic after stroke, spastic paretic arm and hand with neglect syndrome, time since lesion approx. 5 years): In clinical experimental studies it could be shown, that the level of spasticity decreased after the application of conditioning RPMS [14]. During the treatment, nonfunctional muscle contractions are applied to the flexor and extensor muscles of the forearm and the upper arm. The field pulses are applied for a period of 1.5 s followed by a break of 3 s with a total duration of approximately 15 min. In order to assess the change of
flexor spasticity in the forearm due to the conditioning RPMS, the angle ϕ(t) of the MCP joint
of the index finger and the stimulation intensity u(t) have been recorded during open loop stimulation of the index finger extensor immediately before (time t 1 ) and one hour after (time t 2 ) the treatment.
Figure 5: Results of the spasticity evaluation.
208

The results of the spasticity evaluation are depicted in fig. 5. The solid line describes is the difference between the nonlinear functions identified at the time t 2 and t 1 . With The identification result clearly indicates a decrease of the static flexor spasticity component. The dynamic component has increased slightly for extension movements and decreased for flexion movements. These results coincide with the findings of the medical examinations.
4. Conclusion
This paper presents a novel method for rehabilitation of spastic paresis after stroke An automated system identification based spasticity evaluation has the capability to yield objective data and can be executed during the therapeutic stimulation without applying any additional equipment. Furthermore it allows a clear separation between the static and dynamic spasticity component. Hence, it can be a valuable tool for rehabilitation research to help understanding the processes of recovery after stroke. It can also help the physiotherapist to monitor the therapy process and hence, to adapt the therapy to the patient.
5. References
[1] A. Struppler, P. M. Havel, and P. M¨uller‐Barna. Facilitation of skilled finger movements by repetitive peripheral magnetic stimulation (RPMS) — A new approach in central paresis. NeuroRehabilitation, 18(1):69–82, May 2003.
[2] A. B. Conforto, A. Kaelin‐Lang, and L. G. Cohen. Increase in hand muscle strength of stroke patients after somatosensory stimulation. Annals of Neurology, 51(1):122–125, January 2002.
[3] A. Struppler, B. Th. Angerer, Ch. G¨undisch, and P. M. Havel. Modulatory effect of repetitive peripheral magnetic stimulation (RPMS) on the skeletal muscle tone (stabilization of the elbow joint) on healthy subjects. Experimental Brain Research, 157(1):59–66, 2004.
[4]A. Pandyan, G. Johnson, C. Price, R. Curless, M. Barnes, and H. Rodgers. A review of properties and limitations of the ashworth and the modified ashworth scales as measures of spasticity. Clinical Rehabilitation, 13(5):373–383, October 1999.
[5] B.D. Schmit and W.Z. Rymer. Identification of static and dynamic components of reflex sensitivity in spastic elbow flexors using a muscle activation model. Annals of Biomedical Engineering, 29(4):330–339, February 2001.
[6] L. Galiana, J. Fung, and R. Kearney. Identification of intrinsic and reflex ankle stiffness components in stroke patients. Experimental Brain Research, 165(4):422–434, 2005.
[7] M. Bernhardt, B. Th. Angerer, M. Buss and A. Struppler, Neural observer based spasticity quantification during therapeutic muscle stimulation, in Proceedings of the 28th Annual International Conference of the IEEE Engineering in Medicine and Biology Society in New York, August 30th to September 3rd, 2006, pages 4897 – 4900, September 2006
209

II) COMPLEMENTARY LIMB MOTION ESTIMATION (CLME)
1. Introduction
To replace or restore lost motor functions, a growing number of robotic devices are available. Rehabilitation robots, e.g. such as surveyed in [1], facilitate early and extensive therapy, which promotes effective rehabilitation after brain injury [2].
In search of suitable control strategies for such robots, a look at the therapeutic outcome of classical motor rehabilitation methods offers general guidelines. Various evaluation studies on rehabilitation strategies, e.g. for Constraint Induced Movement Therapy [3] or Functional Electrical Therapy [4], have confirmed that therapy is more successful if it aims at a restoration of functional use of the impaired limbs, and if the patient participates actively. Controller design should therefore aim at a provocation of active cooperation of the patient, whose movements should not be just externally imposed, but rather assisted.
In some cases, residual, yet insufficient muscular activity can be detected and reinforced in the paretic leg, either by observation of the generated motion [5], [6], [7], or by EMG measurements of the muscle activation [8]. However, these techniques require sufficiently coordinated activity in the motor cortex regions controlling the impaired limbs.
An alternative approach is to observe the patient’s sound limbs, which might reveal the pa‐tient’s movement intention. For example, [9] suggests to observe thorax acceleration in order to detect the intention of a paraplegic patient to stand up.
We have presented an automated, generic method (”Complementary Limb Motion Estima‐tion”, CLME) that infers from the motion of sound limbs to the intended motion of paretic or amputated limbs [10]. The starting point of this idea are control strategies of the human brain that are employed for the execution of complex, learned motion patterns [11]–[13]: During functional motions such as grasping or walking, the individual Degrees of Freedom (DoFs) are strongly coupled; these linear correlations are also called ”synergies”. This observation indicates a reduced set of manipulated variables. It seems as if our brain has developed such refined control methodologies to deal with the redundancy or ”abundancy” [14], [15] of human DoFs. CLME uses the mathematical method of Principal Components Analysis (PCA) [16], [17] to extract the couplings between limbs in healthy synergistic motion. Using these physiological couplings and a patient’s sound limb motion, it estimates the corresponding motion of his paretic limbs.
Simulation studies show the potential of CLME applied to gait rehabilitation of hemiparetic patients (i.e. right leg ‐ left leg inference) in theory [10]. However, the suitability for control of gait rehabilitation robots can only be answered by practical experiments, where the human closes the loop. The first important question is whether a person can functionally walk with such a unidirectional coupling between legs. Another question is whether patients walking with CLME might produce asymmetric, yet functional walking patterns. Considering the fact that the patient’s own original gait pattern probably remained unrecorded, another key question is whether a subject can adapt to the coupling of someone else.
210

To assess the questions above, we ran a series of experiments on the LOPES gait rehabilitation robot [18]. This exoskeleton‐based robot [19],[20] allows automated limb guidance and measurements during treadmill‐walking. Furthermore, due to its Series Elastic design and lightweight exoskeleton, it offers very low resistance in zero‐impedance mode, such that the sound leg can move almost unhindered. For this first rather qualitative proof of concept, healthy subjects were recruited, and a one‐sided impairment was simulated using the exoskeleton leg as a prosthesis.
This paper contains a brief description of Complementary Limb Motion Estimation (CLME). Then, the experimental setup on the LOPES rehabilitation robot and the obtained results are presented.
2. Method: Complementary Limb Motion Estimation (CLME)
Principal Components Analysis (PCA) [16], [17] is frequently used as a general approach to data compression, where statistical (linear) correlation is exploited. A data set is projected onto a lower‐dimensional subspace in a way that the error after re‐projection into the original data space is minimized. The redundancy in the data, which is revealed by the analysis of correlations, can also be used for the reconstruction of incomplete measurements. A simple example: If only two statistical variables are involved, and they are roughly multiples of each other, then PCA will reveal the multiplication factor. Afterwards, one variable is enough to estimate the value of the other one.
For the application of motion intention estimation, PCA is used to reveal the linear correlations between both legs, i.e. it delivers a function which infers from angles and velocities of one leg to angles and velocities of the other one instantaneously. To obtain this function, joint synergies are extracted from recorded trajectories of normal human gait. Then, reference motion can be generated on‐line for inoperable joints of hemiparetic patients, using the instantaneous states of the sound limbs.
The outputs of the function are angles and velocities for the impaired leg, yet both angles and velocities are subject to uncertainty. As PCA is completely static and does not account for the relationship between the time derivatives, these are not internally coherent. This means the PCA‐estimated velocity is quite different from the velocity estimate obtained via differentiation of the PCA‐estimated position signal. Therefore, an additional Kalman filter is used to merge the two pieces of information, and to calculate the most plausible motion of the impaired leg.
The strong inter‐limb coordination during human walking allows for a very accurate reconstruction of one leg using pre‐recorded trajectories, as shown in Fig. 6.
211

Figure 6: Estimated motion (red dashed line) of the left leg compared with the originally recorded motion (black solid line) of a healthy subject. The motion is estimated based on right leg angles and velocities. The averaged coupling information used has been extracted
(separately for stance and swing phase) from the gait patterns of nine other healthy subjects.
3. Test Setup
To evaluate the feasibility of walking with unilateral coupling, we conducted a first series of experiments with healthy subjects on the LOPES robot. To simulate a one‐sided impairment, subjects walked with their own right leg and a robotic left leg, the motion of which was commanded in dependance of the right leg motion.
The LOPES robot consists of a treadmill in combination with a light‐weight exoskeleton for the lower extremities. It actuates sideways and forward motion, hip abduction, hip flexion and knee flexion.
In the study, 8 healthy subjects took part (6 male, 4 female, aged between 18 and 28, weight between 68 and 82 kg). First, they walked for 3 minutes at 3 km/h in the frame in zero‐impedance mode in order to get used to the robot. Then, they were asked to ”sit” left‐sidedly on a small board mounted to the LOPES frame. Furthermore, a foot was attached to the exoskeleton leg on this side, such that the left LOPES leg became a prosthesis. Fig. 7 shows the setup in action.
Figure 7. The experimental setup with the LOPES rehabilitation robot. The subject rests his left buttock on a board, which is supported by a robotic leg (the LOPES exoskeleton leg with a foot attached to it). The subject’s right leg motion is measured and used as input for CLME
to calculate the reference motion for the robotic leg.
212

Each subject then walked at 3 km/h with CLME based on the extracted coupling and norming of a physiologically comparable person (criteria were gender, hip height and weight), whose gait pattern had previously been recorded in zero‐torque mode at 3 km/h. PCA was performed over 10 seconds of the reference gait without separation of swing and stance phase. Each subject was assigned a different reference subject. Subjects were allowed to hold on to the lateral bars of the LOPES frame in order to maintain balance. Only hip flexion and knee flexion angles and velocities of the right side were included to estimate the corresponding abduction, hip flexion and knee flexion of the left side, because in preliminary experiments, additional consideration of right abduction had led to insufficient robustness.
4. Results
In a professional gait analysis [21], joint angles are generally measured via a motion tracking system, and ground reaction forces are recorded using force platforms or sensor insoles. However, the test setup for this experiment did not include measurements apart from joint angle information. Neither ground reaction forces nor events like heel‐strike or toe‐off were detected, because the primary goal of this study was to answer the binary question of feasibility. However, using only angle data (in the sagittal plane), still some important tendencies can be detected concerning spatio‐temporal gait characteristics, control strategies and adaptation.
Qualitative Observations
All subjects were able to walk with the prosthetic robotic leg after a very short time of practice (15‐30 sec). In the beginning, all subjects tended to do exaggerated hip flexion and too little extension. This was obviously due to the fact that their left leg was ”sitting”, the hip continuously being flexed. Anatomical constraints such as elastic joint moments then complicate the correct extension of the other leg. Several subjects hesitated to place their weight on the left side, although the foot was properly placed. This increased the step length of the right side (due to the running treadmill). Others were quite confident of their "prosthetic" foot and reached an almost normal‐looking gait pattern.
Gait Symmetry
To quantify symmetry, we use a symmetry index [22] to compare joint excursions (represented by the standard deviation of the respective angle) and mean angles between legs. Although the changes in joint excursion symmetry from normal to CLME gait are not consistent among subjects (some maintain a very high level of symmetry), there is a tendency to increase the dominance of the right foot. This means, the right leg has a longer stance phase than the left leg. This is in accordance with the previously mentioned observations concerning the varying confidence the subjects had in their fake leg.
Spatio‐Temporal Joint Motion
Fourier analysis reveals that the step frequency decreases in all subjects (from an average of 89 to 65 steps per minute), which is equivalent to an increase in average step length. This value mainly reflects the longer stance phase on the right. Concerning spatial joint motion, there is an interesting change above the level of significance in the mean of the right hip angle:
213

The mean of the hip angle of the reference subject is clearly correlated with the mean of the hip in CLME‐walking, whereas the mean of the original subject’s hip angle is clearly uncorrelated with both. This is interpreted as an indication that the subject adapts to the reference gait to some extent when walking with the CLME‐controller.
Subject Control Strategies for the Right Leg
It was of particular interest in how far the subjects would maintain or adapt the control strategies of their right leg when walking with the robotic left leg. This question is assessed by looking at the synergies present in the right leg only, i.e. a PCA is performed on the recorded right leg angles and velocities. This analysis reveals a significant weakening of synergies in all subjects (indicated by a decrease in the cumulative fraction of variance explained by the first 2 principal components from an average of 88.9% to 85.2%). This might be an indication that slightly less pre‐programmed control strategies are used, i.e. more voluntary or conscious control of individual joints appears. Concerning the form of synergies, there is a large variance among subjects such that no conclusions can be drawn: For some, the eigenvectors seem to approach those of the reference, for some they stay almost unaltered, for some they change in some other way.
5. Conclusion
The proposed method of Complementary Limb Motion Estimation (CLME) has been presented together with first experimental results, which affirm its suitability for patient‐cooperative gait rehabilitation: Trajectories for inoperable limbs can be generated on‐line using motion information of sound limbs.
Apart from an answer to the binary question of feasibility, the analysis provided some qualitative tendencies: The CLME gait pattern shows hints of adaptation to the reference gait used. Furthermore, functional walking with CLME can be asymmetric, and it seems to trigger slightly more voluntary and conscious control of the right leg.
Future investigations will now aim at an evaluation of CLME with hemiplegic patients. This way, the rehabilitative benefit of a cooperative, intention‐based guidance of the impaired limbs will be investigated. For this purpose, it will probably be combined with a simple balance control using lateral and frontal guidance at the hip, as suggested by the LOPES frame construction.
Another future project is the application of CLME to above‐knee prostheses. For this purpose, the algorithm will be made more flexible, in order to cope with different motion patterns. The required motion segmentation could be performed by hand, but maybe also by dynamic clustering, using methodologies such as Generalized Principal Component Analysis [23] or Correlation Clustering [24].
6. Acknowledgments
The authors would like to thank Gert Jan Nevenzel, Jan Veneman, and Edwin van Asseldonk (all Laboratory of Biomechanical Engineering, University of Twente) for their valuable contribution to this project, all subjects who participated, and the Studienstiftung des Deutschen Volkes for
214

financial support. Special thanks go to Prof. Frans van der Helm (TU Delft) and to Dr. Rainer Burgkart (Klinikum Rechts der Isar, München) for their advice.
References
[1] S. Hesse, H. Schmidt, C. Werner, and A. Bardeleben. Upper and lower extremity robotic devices for rehabilitation and for studying motor control. Current Opinion in Neurology, 16:705–710, 2003.
[2] T.Sinkjær and D. B. Popovic. Trends in the rehabilitation of hemiplegic subjects. Journal of Automatic Control, 15, 2005.
[3] E. Taub, G. Uswatte, and R. Pidikiti. Constraint‐induced movement therapy: a new family of techniques with broad application to physical rehabilitation: a clinical review. J Rehabil Res Dev, 36(3):237–51, 1999.
[4] M. B. Popovic et al. Clinical evaluation of functional electrical therapy in acute hemiplegic subjects. Journal of Rehabilitation Research and Development, 40(5):443–454, 2003.
[5] R. Riener and T. Fuhr. Patient‐driven control of fes‐supported standing up: A simulation study. IEEE Trans on Rehab Eng, 6:113–124, 1998.
[6] H. Kazerooni, Jean‐Louis Racine, Lihua Huang, and Ryan Steger. On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE International Conference on Robotics and Automation, pages 4364–4371, April 2005.
[7] S. Jezernik, G. Colombo, and M. Morari. Automatic gait‐pattern adaptation algorithms for rehabilitation with a 4‐dof robotic orthosis. IEEE Transaction on Robotics and Automation, 20(3):574–582, June 2004.
[8] H. Kawamoto and S. Kanbe. Power Assist Method for HAL3, Estimating Operator Intention Based on Motion Information. In Proceedings of IEEE International Workshop on Robot and Human Interactive Communication, pages 67–72, Millbrae. California USA, 2003.
[9] C. Azevedo and R. Héliot. Rehabilitation of functional posture and walking: Coordination of healthy and impaired limbs. Journal of Automatic Control, 15(Supplement):12–14, 2005.
[10] H. Vallery and M. Buss. Complementary limb motion estimation based on interjoint coordination using principal components analysis. In Proceedings CCA 2006, Munich, October 2006.
[11] A. Alexandrov, A. Frolov, and J. Massion. Axial synergies during human upper trunk bending. Exp Brain Res, 118(2):210–220, January 1998.
[12] N. St‐Onge and A. G. Feldman. Interjoint coordination in lower limbs during different movements in humans. Exp Brain Res, 148(2):139– 149, 2003.
215

216
[13] V. Dietz, K. Fouad, and C. M. Bastiaanse. Neuronal coordination of arm and leg movements during human locomotion. European Journal of Neuroscience, 14(11):1906–1914, December 2001.
[14] D. S. Reisman and J. P. Scholz. Aspects of joint coordination are preserved during pointing in persons with post‐stroke hemiparesis. Brain, 126(11):2510–2527, November 2003.
[15] N. Bernstein. The Coordination and Regulation of Movements. Pergamon Press Ltd., London, 1967.
[16] K. Pearson. On lines and planes of closest fit to systems of points in space. Philosophical Magazine, 2(6):559–572., 1901.
[17] I. T. Jolliffe. Principal Component Analysis. Springer‐Verlag, New York, 2nd edition, 2002.
[18] H. Vallery, H., R. Ekkelenkamp and H. van der Kooij. Complementary Limb Motion Estimation based on Interjoint Coordination: Experimental Evaluation. Proceedings of ICORR 2007, 2007, to appear.
[19] J.F. Veneman et al. Design of a series elastic‐and bowdencable‐based actuation system for use as torque‐actuator in exoskeleton‐type training. In Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, 2005.
[20] R. Ekkelenkamp, J. Veneman, and H. van der Kooij. Lopes : Selective control of gait functions during the gait rehabilitation of cva patients. In Proceedings of the 2005 IEEE 9th International Conference on Rehabilitation Robotics, 2005.
[21] J. Perry. Gait Analysis: Normal and Pathological Function. Slack, Inc., 1992.
[22] R.O. Robinson, W. Herzog, and B.M. Nigg. Use of force platform variables to quantify the effects of chiropractic manipulation on gait symmetry. J Manipulative Physiol Ther, 10:172–6, 1987.
[23] R. Vidal, Y. Ma, and S. Sastry. Generalized principal component analysis (GPCA). IEEE Transactions on Pattern Analysis and Machine Intelligence, 27(12):1945–1959, December 2005.
[24] C. Böhm et al. Computing clusters of correlation connected objects. In ACM SIGMOD Int. Conf. on Management of Data, 2004.
Privacy and functionality in the perspective of ambient intelligence and disability
Mathijs SOEDE VILANS
(former called Institute for Rehabilitation Research) Hoensbroek, The Netherlands
Abstract.
The role of Ambient Intelligence, AmI, in the field of disability is a complex phenomenon. First, the technological driving forces of AmI towards the society is also towards the people having any type of disability. Where we are focusing on Designing our Society for All, certainly, AmI has to be watched carefully, to catch the opportunities.
Where AmI means for most of us an increased comfort and better and faster functioning, the same issues can mean for persons with disability a passing of a threshold between dependency (much need for human care support) and autonomous living. We could speak of enhanced leverage in case of a disability. At the other side, there are new risks for people in missing the AmI opportunities.
This paper will first look into the concepts and tries to find conceptual models for AmI in our society.
The focus of this paper will be on an ethical approach, i.e. the invasion of privacy and a trade‐off between a gain in function and a loss or risking a loss of privacy with its negative effects.
Achieving trust on technology (AmI) is most important. This trust must best be based on reality and objective information.
An example of wireless monitoring of people and feedback about results of the monitored data to the client will be given to explain some of the risks.
Introduction
AmI does have great potential and in every segment of our society we will see in the near future it’s effects. However, for elderly, chronic ill and disabled persons we see that the practical needs are differ from the larger portion of our society: wealthy young and middle aged workers. If important matters are handled unobtrusive, unnoticed, we do have to be cautious. Misuse of the AmI environment is possible: identity theft and/or illegal use of individual profiles (personal information and data).
The phrase that “AmI will shape the future of ordinary people, but ordinary people will shape AmI”, raises the issue of Design for All [1]. The numbers of aged, chronically ill and disabled persons are large and might be interesting from a market viewpoint. However it is not always
217

understood that the special needs of those groups, individuals within those groups are often, at best niche markets where sometimes only strategies like orphan medicines can bring solutions. This issue can be illustrated easily when we look at the EU‐Ambient intelligence scenario’s: Maria the road warrior will be a complete different scenario when Maria is a wheelchair user, or Dimitri the Digital‐Me is actually mentally or cognitive impaired. Of course, AmI offers a very great challenge for Maria with the wheelchair and Dimitri with his impairments [2].
In English a lot of words exist which are associated with ambient.
• Circumstance: is related to fact for example in legal issues,
• Environment: relates to pollution but also used in occupational therapy,
• Surrounding and Neighborhood: is used in urban planning and living area’s.
• Milieu: is a general term for a composite number of factors around us.
• Ambient, the word which could be associated with the English and French word Ambiance.
The word Ambient seems, intentionally chosen to be related to good feeling and good moods. At least we can see this in the brochures of the founding father of Ambient Intelligence, Philips research. Examples of photographs form Philips brochures are given in the picture 1. In these photographs we see hardly any computer or electronic technology. It is all hidden and unobtrusive, which is very nice.
Figure 1: From Philips Research brochure on AmI, 2006.
218

The basic role of AmI, or what is the AmI support to people?
What is actually the basic role of AmI? This is not an easy question: Morganti and Riva tried to visualize this for a virtual reality model where they made the distinction (seen from the user’s perspective) a known, an unknown and a learning part in our society or ambient intelligent environment, see figure 2 [3].
Figure 2: Annotated figure of Morganti and Riva’s model for the virtual reality case.
The deterministic part which is known to the person and is always the same unless the environment is modified in a specified way. An example could be a local environment with shops and fixed opening times but also a large transportation database for train and air travel where computers can find the optimal choice matching your preferences and needs. If the environment, shops, train tables are modified, the computer calculates a new optimal choice. A user, impaired or not, should be able to follow and/or memorize a series of determined steps (a previous planned trip is exactly followed step‐by‐step).
The unknown part (again from the user’s perspective), is changing dynamically and the user has to adopt to the actual situation accordingly. In this situation computers can use a database and infrastructure based on rules to create an virtual reality on top of the real environment: thus assisting the user in an unknown space. Assistance by the computer is based on a computer model of the user’s preferences (User profile). User and intelligent environment cooperate in a mixed reality situation. Due to the unknown and dynamic changing environment the user should be able to follow procedures or use rules.
The learning part is meant to point at the ability of the user, to learn and to change. The user’s ability and preference can be changed by learning but also by deterioration of human functions which by aging or trauma and illness. This refers to rehabilitation which is actually looking for the best fit and training for making the best use of the opportunities in society.
219

This model refers to virtual reality, but in essence it describes the interventions in human life offered by AmI:
1. finding the optimal solution or path through a complex society and guiding step by step to the goals to be achieved.
2. assisting the human on a rule based, subjective interpreted society and
3. adapting the assistance to the users abilities and learning.
AmI is functionality, support, creating moods. AmI consists of (almost) hidden technologies i.e.: computing hardware, software and sensors. The technological systems can have different positions depending on the function and shape of the technology. In the relation, Person (Me)
Technology World, different relations exist. The type of he relation is important factor in gaining trust. And “Trust” is a main factor in acceptance of the technological system, i.e. the AmI. Don Ihde defines the following relationships [4]:
First, technology and mankind is considered as that technology does have a mediating relation between Me, the person, and the world. Technology is set as a tool through which the world is observed or is activated upon.
Second, technology can have a background relation: it works, sometimes quite at a distance but it is important to have it. A central, automatically controlled heating system is an example of this situation; or a logistic system handling the newspaper to be in the mailbox every day. We do not see this technology but it is there and we take it for granted. It can be very influential to our way of life and trust in technology in general.
Third, technology can act as another partner, another ego, which is called an Alterity relation. People act towards technology as it was another intelligent being. People, very young and very old as well, can set up a conversation with a robot toy or even a much beloved artifact like a special car or painting.
In AmI all three different technology relations do exist. In the background relation, AmI can perform a plethora of functions. The user is not very conscious about these functions. In the alterity relation, technology is not perceived as technology but the alter‐ego is what the user experiences. The mediating relation is more likely to be a conscious experience. Functions performed by the technology in a mediating relation are more conscious perceived.
From an ethical viewpoint it is likely that a breach in privacy, stealing personal information, can be unnoticed in technology which is hidden in the background or technology with has an alterity relation. In a mediating relationship, people might be more aware of the technology used and it’s impact on their life..
Acceptance of AmI.
A paper of Adams and Sasse [5] describes the relations between information sensitivity, information usage and the trust in the information receiver. The figure 3 shows that the user considers the sensitivity of the information, does or does not trust the receiver of the information and considers the information usage in respect to cost (loss of privacy) and
220

benefits (gains in functioning of the system). AmI is often very much hidden, and claims to be unobtrusive, thus the user needs a high level of trust that the information receiver handles the information in a right and agreed way.
Trust is based on assumptions about the information receiver: if the implications are thought to be strong, and privacy invasion is perceived, then, in an emotive reaction the technology will be rejected.
Figure 3: Adams and Sasse’s model about trust and cost‐benefit and judgements.
The gains and threats connected to AmI are creating a cost‐benefit debate: AmI will create better services, increase quality of life and adapts to the peoples needs and profile but one might expect that you may also loose control of your own situation (cost of loosing privacy). Another threat might be, due to the fact that AmI will be costly at least at the start, it will become a luxury good.
Some application area’s of AmI in the field of disability.
Some area’s in society, problem area’s could most probably gain very much from AmI.
First, we want a secure environment where systems prevent intrusion in houses, provide support in public spaces against violence and burglary. For elderly and disabled people, security is quit important due to the higher vulnerability they may experience.
In home and in the public space a variety of sensors could be installed. Low cost sensors and intelligent algorithms can alert people or even raise an alarm for assistance. It will not be effective when the follow‐up is not fast and effective: also here it might be possible that the nature of the signals from the sensors direct the appropriate follow‐up service.
Second, personal safety is also related to a secure environment, but is in principle a different issue. Personal safety can be improved when he user him/herself is monitored medically in case of a chronic illness or age‐related deteriorated functioning. Also prevention of falls due to instability can be an issue: measuring the physiological condition and an “intelligent” way of processing the data might lead to early warnings and therapeutic interventions. But also prediction of epileptic seizures could be done if we know the phenomenon better and the
221

changes in physiology and behavior early enough. A fast follow‐up with medical assistance (unlike the security situation is a medical professional needed at the emergency‐call scene) is helpful to prevent more serious damage.
Third, a lot of people do need some guidance or a continuous assistance through a chaotic society. An example is travel support systems which give precise advice based on the known geographic location. Guidance through the day in house keeping, shopping and cooking is for persons with an impaired cognitive function (memory loss, lack of coordination) important.
Fourth problem to be solved is the advice and motivating support that people need to gain a more healthy lifestyle and well being. Life style and wellness are modern issues focusing on behavior that is considered to prevent illness (mentally en physically) and let people feel better. It is seen often that programs for health support fail because of a lack of motivation; the exercises are not maintained and people are not mental and socially active. An older idea of proximal development by Vygotski mentions a step by step approach and in this context a feedback is seen as an important motivator [6]. Short term feedback about the exercise itself: is it done and how wel is it done. Very short term feedback is changing, for example, the rhythm of the movement by music in a slightly higher rhythm then the exercise rhythm. Or long term feedback on the physical condition and probably the mental condition as well as a result of the exercises itself. The measurement of the emotional state or mood may enforce the feedback algorithms. AmI is all about mood and these rather futuristic phenomena will be important for that reason.
Fifth, the top‐priority as indicated by elderly is loneliness. This is not only because of age but it is known also that certain impairments are causing a change in mood of people or even a change in character. The latter, a change of character can take place in CVA patients. But also depression as such is reported more often in case of some impairment (Blindness and traumatic brain damage in general). Experiments are taking place to provide some sort of attention care; with this it is meant in practice that by telecommunication technology contacts are laid between clients and a people who contact those people and have a chat (sometimes rather long) and/or take notice of a special situation or problem and organize a follow‐up. Also in this case it would be very interesting if mood and changes of mood can be measured individually and reported to the caregiver in a care center or near family member.
A trade off between increased functional gain and support and loss of privacy.
Maintaining privacy and gaining better functionality can be conflicting. Maintaining privacy might also be costly, because of the extra technical precautions and measures.
This will be illustrated in three different situations in life:
A. The first situation is of a high urgency: a life threatening situation. When caught by a street accident or a very sudden illness it might be needed to get all the client’s data immediately at hand in order to develop the correct diagnosis and create an emergency care plan according to the best personal interest of the client/patient. In order to survive, most people will give all detailed information to anybody who can assist. Privacy is not getting a high priority but the best treatment is extremely
222

important. Having the information directly available in the ambulance or in the emergency hospital, requires a fast working communication infrastructure which is expensive.
B. A second case is of a chronic ill patient. The illness does not require very urgent actions but requires precize defined actions to get a better quality of life. Again, to adapt a situation that the best quality of life is created one needs a precise profile of the client: medical prospects, medical history, preferences and behavioral data.
C. A particular situation is in the last phase of life due to a disease or illness, where decisions are taken about medication and treatment, often within a family environment. It is a restricted circle of known people and sharing personal information is not per definition an issue. Thus privacy can be an issue or not. Loss of functionality due to privacy restrictions is most probably not the case.
These three situations are summarized in the following table 1.
Function Privacy need Cost
Acute care needed
Function overrules any other issue.
Low. High cost for life saving is accepted.
Chronic illness Not for any price, cost effective also for privacy – loss.
High need for maintaining privacy.
Major factor, effective and low costs.
Care in end of life Phase
Very specific functions, pain relief and comms
No issue in family circle
Varies, but a new digital divide?
Table 1: situations and Function versus Privacy versus Costs
Practical Example of Wireless technology for monitoring
An example about AmI and the risks of privacy invasion is the example of a wireless physiologic data collection and feedback system with GSM‐based communication, web‐support and feedback about the results achieved. This example is explored and studied by Lars Ødegaard, in his thesis [7]. This example can be seen as a medical monitoring situation but also as lifestyle enhancement situation. The difference is in the goals to be achieved, the role of the advisor (medical advisor or professional trainer) and the (medical) condition.
The situation is presented in the picture 4 below:
Signals from the body are collected by wireless sensors: for example movement sensors obtained by an wireless accelerometer and heart rate by special body surface sensors. These
223

signals are sent to an adapted wireless telephone or PDA with GSM connectivity. The data is then sent to a web‐based server and either the medical professional, the trainer or the client self can look at the website and the data presented. This is a direct feedback to the client and it is possible that the medical professional or trainer adds some expert advice towards the client, or the client asks for a specific explanation of what is seen at the web‐site.
Figure 4: Wireless monitoring and feedback system.
To understand the vulnerability of systems like the wireless monitoring and feedback system which was used in pilot experiments it is important to describe aspect of the system in a transparent way: The table 2 below gives an overview.
Specialised sensors Yes
Communicate with many No, only preset entities.
Part of a larger system Yes, part of health records and treatment.
Integrated in standard objects Partly, the mobile telephone set. Sensors and DAA are specialised objects.
Unobtrusive Partly
Gather information Yes
Learn about users preferences Yes
Provide feedback Yes
Make choices No
Promote human contact No, not directly.
Table 2: Characteristics of the wireless monitoring and feedback system.
Examples of possible risks and possible effects, when a privacy invasion is taking place are presented in table 3.
224

Situation = mobile telephone monitoring
Risk
Comment on Effect
Close to the body tapping of information
Activity and physiological data can be transmitted to some person or authority
In general not of interest for anybody; limiting risk of possible tap by smaller range of wireless Body Area Network
Tapping the GSM transmission and/or using the web‐site archive
A much more complete picture can be created about activity data
An analysis of a persons daily activity and health status can be misused in situations.
Combining data with health profiles can lead to unwanted restrictions in sick fund services or adapted premium.
Data added to shopping profiles creates a picture of expenditure and activity which under circumstances can be a reason for withdrawal of allowances.
Locating and cross referencing GSM signals
Position of the user can be calculated
As proposed in case of geographical location systems for mental problems: freedom can be restricted.
Etc Etc Etc
Table 3: Examples of situations, risks and possible effects.
These risks fall within two main categories:
1. Identity theft: the identity of the owner is illegally used to gain something out of this. A most clear example is that private information of celebrities and politicians is having news value. The same data of an unknown civilian is pretty uninteresting for others.
2. Illegal use of particular information by combining with information from other sources.
225

Looking at those two types of risks we can see that they are related to extra services for the benefit of the client. For example:
• If close to the body signals can be measured wireless, the burden for the client is low and wearing the sensors is convenient and unobtrusive. The wireless link could however be tapped by others. But in this case the sensors and the signals are very special and such a data theft /identity theft requires a major effort to achieve and for an overview of that type of data for a longer period is even more difficult.
• If by tapping the GPS data from the client, which is “just” breaking into the password shielded website, the whereabouts of the client are known. This could be very troublesome for people and especially for those in public functions.
• Health insurances (could) offer more and more client related services. Clients who buy healthy food could have a refund. Clients who show that they have an active life and good lifestyle proven by their activity program are supported in some way by the insurance company. Clients who cannot show these efforts, possibly the majority group, are not obtaining these benefits and moreover this might be a factor in a decision on an expensive treatment or expensive, supportive technology.
These examples should not lead immediately to refrain from these services or to build in expensive safety barriers which is may be an extra barrier for use. First of all, an open discussion should take place about these issue and a fully transparent view on the information flows and usage should be made available in fast and easy to understand descriptions.
Furthermore the use, and possibly the misuse of (new) services should be recorded: the primary data for the main purpose limited in period and extent needed for the specific goals of the system. All other use of the data like for administration and finance and other types of usage should be kept also long enough collect eventual evidence of proper or false use. The latter could be illustrated as that internet companies ask if it is allowed to use address information for mailing news and associated products of companies cooperating by the primary company. However they never give an overview to whom the address information is actually given or even sold.
We need most and for all an in‐depth discussion about the pro’s and con’s of the concrete and real AmI applications, and not having onl global discussions in general. The effects on people and the society are very different for different applications.
Concluding remarks.
In the author’s opinion we see a dilemma: Privacy protection and easy functioning of a system as explained above. A second dilemma can be derived from this: we need low‐ cost and efficient systems but to ensure acceptable levels of privacy protection, much more R&D effort has to be put in the design of a new systems and products.
A way to solve these dilemma’s might be to continue in creating strict laws for fully protecting privacy. Systems designers should be obliged to incorporate security systems, but this is also a
226

227
way which limits the new functionalities coming with AmI technologies. We do not think that this is the best way forward.
We propose that we study these issues much more thoroughly than in the past:
• During the design process the dilemma must be made very transparent. In real cases fundamental issues can be discussed. The end‐results and the reasoning should be included in de specifications. Including the reasoning itself can make it later on clear when new user groups emerge, conditions are changed, or criteria are modified or new insight is obtained. This reported reasoning is also important to support the next recommendation.
• Products and systems have to provide in a very clear way how communication flows are organized, what information is transmitted, who is looking to the information and what precautions are taken to prevent misuse. We suggest to include this information like in the CE – marking. However, much attention must be given to the way that the information is communicated to the users. We believe that learning from the practice of reasoning and trialing is the best way to gain expertise in this area. And after that proper regulations and laws will be accepted by a broad public.
8. References
[1] Philips Research, Booklet on ambient intelligence, Eindhoven, 2006
[2] ISTAG; Scenario’s for ambient intelligence 2010. European Union, feb 2001. IPTS‐Seville.
[3] F. Morganti, G. Riva. Ambient Intelligence for rehabilitation. In: Ambient Intelligence, IOSPress, Amsterdam, 2005.
[4] D. Ihde, Technology and the life world. Bloomington / Mineopolis, Indiana University Press. 1990.
[5] A. Adams & M. A. Sasse (2001): Privacy in Multimedia Communications: Protecting Users, Not Just Data. In A. Blandford, J. Vanderdonkt & P. Gray [Eds.]: People and Computers XV ‐ Interaction without frontiers. Joint Proceedings of HCI2001 and ICM2001, Lille, Sept. 2001. pp. 49‐64. Springer.
[6] L. Vygotski (1978). Mind and society: The development of higher psychological processes. Cambridge, MA: Harvard University Press
[7] L. Ødegaard, Privacy and Functionality in an Ambient Intelligence Application, University of Oslo / Universiteit Maastricht, Technological Culture, 2006

Development of HumanInteractive Robot – RIMAN Development of HumanInteractive Robot – RIMAN
Zhiwei Luo, and Shinya Hirano Zhiwei Luo, and Shinya Hirano Biomimetic Control Research Center, RIKEN
Faculty of Engineering, Kobe University Biomimetic Control Research Center, RIKEN
Faculty of Engineering, Kobe University
As one of the most important technologies to support the coming aging society, development of human care robots is attracted by many researchers. Based on the recent advances of electronic technology, system control engineering and information science, it is already possible for us to develop the robot that has almost the same scales as the human‐like size, human‐like physical ability as well as many types of sensors such as vision, audition and tactile sensation. One typical example is RI‐MAN as shown in Fig.1. Although it is designed as a platform which integrates the advanced research results of the bio‐mimetic control research center for basic scientific research of human‐robot interactions, RI‐MAN has its power and ability to be applied to help elderly people as well as to perform hard physical tasks in complex environment such as home and/or hospitals.
As one of the most important technologies to support the coming aging society, development of human care robots is attracted by many researchers. Based on the recent advances of electronic technology, system control engineering and information science, it is already possible for us to develop the robot that has almost the same scales as the human‐like size, human‐like physical ability as well as many types of sensors such as vision, audition and tactile sensation. One typical example is RI‐MAN as shown in Fig.1. Although it is designed as a platform which integrates the advanced research results of the bio‐mimetic control research center for basic scientific research of human‐robot interactions, RI‐MAN has its power and ability to be applied to help elderly people as well as to perform hard physical tasks in complex environment such as home and/or hospitals.
Figure 1. RI‐MAN is carrying up a person.
The name of RI‐MAN comes from our research project on: “Robot Interacting with Human”. To design such a robot is not easy because we have to consider many factors such as the size, torque, skillfulness, safety as well as intelligence of the robot to work within human
229

environment, considering the human's size, force and response speed. RI‐MAN is developed as an autonomous robot 158cm in height and about 100kg in weight, and he is powered by DC motors. With such a size, the main feature of RI‐MAN is that he can generate high torque output skillfully by using tactile sensor feedback and full body manipulation. Specifically, RI‐MAN can hold an object up to about 35kg, and RI‐MAN can skillfully use its tactile sensor feedback to carry up a doll with 18kg safely from a bed. There are 5 tactile sensor sheets equipped on RI‐MAN's two arms and chest, each has 64 points of pressure sensing elements. A small‐size controller, named C‐Chip, with a size 3cm by 4cm as shown in Fig.2 is used near each sensor sheet to measure and process the tactile information, which results in the fast processing of the overall 320 points of analog pressure inputs while reducing noise.
Figure 2. Small‐size controller, C‐Chip.
To generate such a large torque output, RI‐MAN utilizes special coupled drive mechanism shown in Fig.3 as well as full body manipulation. The former generates large force by cooperation of many motors and the latter uses contact between RI‐MAN and many parts of the object skillfully by using hierarchical decentralized control network of C‐Chip. For the communication among each level, the control network of RI‐MAN uses shared memory technology so as to realize synchronization and reflex between each motors and tactile sensors. In addition, RI‐MAN is equipped with cameras, sound localization function, sound recognition/speech function to search and track a person who talks to him. Sound localization function enables 3D sound localization using only two microphones. Concerning image processing, sound recognition and speech function, while the conventional approaches are used, the main feature of RI‐MAN is that he applies them in an integrated way. For example, considering a task of human tracking, RI‐MAN has two kinds of sensor input from both the cameras and microphones. Thus he should use them in an integrated way. RI‐MAN also has smell function that uses only one device to detect more than 8 kinds of gases such as
230

ammonia. In the application of human care task, the gas sensor can detect urine. This enables RI‐MAN to detect a wet diaper.
Figure3. Coupled drive mechanism of RI‐Man.
By now, the information processing function of RI‐MAN is still under development. For example, the number of commands he can understand is limited and he cannot distinguish different persons. It is expected that he will become more intelligent to adapt to the changing and complex environment in the near future.
Towards the final goal of human life support applications, more research should be conducted, so as to improve RI‐MAN's autonomy and physical power while taking into account the scale of its size, force and response speed compared with those of human.
For more information of RI‐MAN, please refer to the following HPs:
http://www.bmc.riken.jp/~RI‐MAN/index.html
http://www.bmc.riken.jp/~RI‐MAN/high_resolution/
http://www.riken.jp/engn/r‐world/info/release/news/2003/jul/index.html
http://www.riken.jp/engn/r‐world/info/release/news/2006/feb/index.html
http://www.bmc.riken.jp/~robot/us/research.html
Acknowledgment: There are 13 researchers in RIKEN BMC have contributed in developing RI‐MAN. The authors would like to express thanks to all of them.
231