
Wave Energy Propulsion forPure Car and Truck Carriers
(PCTCs)
Master thesis
by
Ludvig af Klinteberg
Supervisor: Mikael Huss, Wallenius Marine
Examiner: Anders Rosen, KTH Centre forNaval Architecture
Stockholm, 2009
KTH Centre forNaval Architecture

Abstract
Wave Energy Propulsion for Pure Car and Truck Carriers (PCTC’s)The development of ocean wave energy technology has in recent years seena revival due to increased climate concerns and interest in sustainable en-ergy. This thesis investigates whether ocean wave energy could also beused for propulsion of commercial ships, with Pure Car and Truck Carriers(PCTC’s) being the model ship type used. Based on current wave energyresearch four technologies are selected as candidates for wave energy propul-sion: bow overtopping, thrust generating foils, moving multi-point absorberand turbine-fitted anti-roll tanks.
Analyses of the selected technologies indicate that the generated propulsivepower does the overcome the added resistance from the system at the shipdesign speed and size used in the study. Conclusions are that further waveenergy propulsion research should focus on systems for ships that are slowerand smaller than current PCTC’s.
Vagenergiframdrivning av biltransportfartyg (PCTC’s)Utvecklingen av vagenergiteknik har pa senare ar fatt ett uppsving i sam-band med okande klimatoro och intresse for fornyelsebar energi. Detta exam-ensarbete utreder huruvida vagenergi aven skulle kunna anvandas till fram-drivning av kommersiella fartyg, och anvander moderna biltransportfartyg(PCTC’s - Pure Car and Truck Carriers) som fartygstyp for utredningen.Med utgangspunkt i aktuell vagenergiforskning tas fyra potentiella teknikerfor vagenergiframdrivning fram: ”overtopping” i foren, passiva fenor, ”mov-ing multi-point absorber” samt antirullningstankar med turbiner.
Analys av de valda teknikerna indikerar att den genererade framdrivandekraften blir mindre an systemets adderade framdrivningsmotstand vid denfartygshastighet och -langd som anvands. Slutsatserna ar att framtida forskn-ing om vagenergiframdrivning borde fokusera pa fartyg som ar mindre ochlangsammare an dagens PCTC-fartyg.

Contents
Contents ii
1 Introduction 1
2 Theory of ocean waves 2
2.1 Surface gravity waves . . . . . . . . . . . . . . . . . . . . . . . . . 22.1.1 Basic equations . . . . . . . . . . . . . . . . . . . . . . . . . 22.1.2 Deep water approximation . . . . . . . . . . . . . . . . . . . 52.1.3 Energy transport . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Ocean wave spectra . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Wave energy on worldwide route 9
4 Wave energy conversion 12
4.1 Overtopping devices . . . . . . . . . . . . . . . . . . . . . . . . . . 124.1.1 Wave Dragon . . . . . . . . . . . . . . . . . . . . . . . . . . 134.1.2 Sea Slot-cone Generator . . . . . . . . . . . . . . . . . . . . 15
4.2 Oscillating water column . . . . . . . . . . . . . . . . . . . . . . . . 164.3 Oscillating bodies . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.4 Thrust generating foils . . . . . . . . . . . . . . . . . . . . . . . . . 20
5 Proposed technologies 21
5.1 Bow overtopping . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215.1.1 Ship motions . . . . . . . . . . . . . . . . . . . . . . . . . . 225.1.2 Overtopping model . . . . . . . . . . . . . . . . . . . . . . . 235.1.3 Water acceleration effect . . . . . . . . . . . . . . . . . . . . 275.1.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 Thrust generating foils . . . . . . . . . . . . . . . . . . . . . . . . . 325.2.1 Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2.2 Studies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
ii
CONTENTS iii
5.2.3 Numerical experiment . . . . . . . . . . . . . . . . . . . . . 335.2.4 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.3 Moving Multi-Point Absorber . . . . . . . . . . . . . . . . . . . . . 365.3.1 Modelling . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375.3.2 Numerical solution . . . . . . . . . . . . . . . . . . . . . . . 385.3.3 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.4 Turbine-fitted anti-roll tanks . . . . . . . . . . . . . . . . . . . . . 40
6 Conclusions 41
Bibliography 42
Nomenclature 45
Abbreviations 49
List of Figures 50
List of Tables 51

Chapter 1
Introduction
This master thesis project has been carried out at Wallenius Marine in Stockholm,
and the purpose of it has been to investigate the possibility of reducing the fuel
consumption of Wallenius Lines’ Pure Car and Truck Carriers (PCTC’s) by extracting
energy from sea waves.
Wallenius works with a strong environmental vision, which in 2005 was expressed in
the conceptual emission-free E/S Orcelle. The Orcelle would be driven by fuel cells
together with a combination of solar, wind and wave energy systems. This project
has started off from this vision, in order to investigate if wave energy propulsion really
is a future possibility for the shipping industry.
In the 1970’s and early 1980’s extensive research was made in wave energy conversion,
including wave energy ship propulsion, motivated by high oil prices. Most projects
however lost their funding when oil prices dropped again in the mid 1980’s. In the
last few years there has been a revival in wave energy technology and several wave
energy conversion methods are now ready for large-scale implementation.
This thesis summarises current wave energy research, with the purpose of identifying
which techniques can be transferred onto a moving ship. Based on this summary
a number of techniques have been chosen as possible candidates and investigated
further, to evaluate if they could successfully be implemented on a PCTC.
1
Chapter 2
Theory of ocean waves
2.1 Surface gravity waves
This chapter provides a brief introduction to the theory necessary for the analysis of
ocean waves and the energy they transport.
2.1.1 Basic equations
The equations governing ocean waves can be derived from the basic principles of
fluid dynamics, the Navier-Stokes equations1. For a Newtonian fluid the equations
for conservation of mass and momentum can be written on Cartesian tensor form
(using the Einstein summation convention) as
∂ρ
∂t+
∂
∂xj(ρuj) = 0 (2.1)
∂ui∂t
+ uj∂ui∂xj
= −1ρ
∂p
∂xi+
1ρ
∂τij∂xj
+ fi (2.2)
where ui is the velocity vector, ρ is the density of the fluid, p is the total pressure,
fi is the external force and τij is the viscous stress tensor
1For a complete treatment of Navier-Stokes equations and surface gravity waves, see [14].
2

CHAPTER 2. THEORY OF OCEAN WAVES 3
τij = µw
(∂ui∂xj
+∂uj∂xi− 2
3∂ur∂xr
δij
)(2.3)
where µw is the dynamic viscosity of sea water.
For an incompressible fluid, which for our purposes is a valid approximation of sea
water, the density ρ is constant, reducing the conservation of mass to
∂ui∂xj
= 0 (2.4)
Using this, equations (2.1) and (2.2) reduce to the incompressible Navier-Stokes
equations:
∇ · u = 0 (2.5)
∂u
∂t+ (u · ∇)u = −1
ρ
(∇p+ µw∇2u
)+ f (2.6)
To further simplify the equations the following assumptions are made for ocean waves:
1. µw = 0, viscosity is neglected.
2. ∇× u = 0, the flow is irrotational.
3. f = −∇(gz), the only external force is gravity.
4. Small amplitude waves, allowing the problem to be linearised by neglecting
velocities of second order and higher.
5. Surface tension effects can be neglected.
Assuming that the flow is irrotational, there exists a scalar velocity potential
u = ∇φ (2.7)
which reduces the conservation of mass (2.5) to the Laplace equation
∇2φ = 0 (2.8)

CHAPTER 2. THEORY OF OCEAN WAVES 4
Applying the above assumptions the momentum equation (2.6) is reduced to the
linearised Bernoulli equation
∂φ
∂t+p
ρ+ gz = 0 (2.9)
To solve this equation a case is considered where the waves propagate in the x
direction and the motion is restricted to the xz plane. The surface displacement
ζ(x, t) of the wave is measured from the undisturbed free surface at z = 0. Two
boundary conditions are specified at the free surface and one at the bottom, where
z = −h0. The boundary condition at the bottom is
uz =∂φ
∂z= 0 at z = −h0 (2.10)
The first boundary condition at the free surface is the kinematic boundary condition,
which implies that a fluid particle at the surface never leaves the surface.
∂ζ
∂t+ ux
∂ζ
∂x= uz =
∂φ
∂zat z = ζ (2.11)
This is linearised and approximated to a first order of accuracy
∂ζ
∂t=∂φ
∂zat z = 0 (2.12)
The second surface boundary condition is the dynamic condition, that the pressure
just below the free surface is equal to the ambient pressure (neglecting surface ten-
sion). Taking the ambient pressure to be zero, this is written
p = 0 at z = ζ (2.13)
which upon insertion into (2.9) and evaluation at z = 0 rather than z = ζ (small
amplitude waves) gives
∂φ
∂t= −gζ at z = 0 (2.14)

CHAPTER 2. THEORY OF OCEAN WAVES 5
An ansatz for ζ(x, t) is required in order to solve Eq. (2.8) using conditions (2.10),
(2.12) and (2.14). Assuming a sinusoidal waveform with amplitude H/2, angular
frequency ω and wavenumber k
ζ(x, t) =H
2cos(kx− ωt) (2.15)
results in the solution
φ =Hω
2kcosh k(z + h0)
sinh kh0sin(kx− ωt) (2.16)
ζ =H
2cos(kx− ωt) (2.17)
ω2 = gk tanh(kh0) (2.18)
which means that the free surface displacement is sinusoidal with a wave height H
between crest and trough. Eq. (2.18) is the dispersion relation, λ = 2π/k is the
wavelength and T = 2π/ω is the wave period.
2.1.2 Deep water approximation
On deep water where h0 is large the dispersion relation (2.18) can be reduced to
ω2 = gk (2.19)
since tanh(x)→ 1 as x→∞. In reality this approximation is valid when h0 > λ/3.
The phase speed c ≡ ω/k of the wave can then be written
c =
√gλ
2π=√g
k(2.20)
Since the propagation speed of a wave depends on its wavenumber, waves of different
lengths will propagate at different speeds and disperse. Because of this a system such
as this, where c depends on k, is called dispersive. In a dispersive system the energy
of the waves does not propagate with the phase speed. Instead it propagates with
the group speed cg ≡ dω/dk, which for deep water becomes
cg =12
√g
k=gT
4π(2.21)

CHAPTER 2. THEORY OF OCEAN WAVES 6
2.1.3 Energy transport
The energy content per square meter of ocean surface is the sum of the potential
and kinetic energy of the wave.
E = Ep + Ek[J/m2
](2.22)
The average potential energy over one wavelength in the propagataion direction is
found by considering the work necessary to transform the undisturbed surface level
into the waveform. Using Eq. (2.17) and integrating over one wavelength the work
done to raise the centre of mass of the water column ρζdx the distance ζ/2 from
the undisturbed surface level, one obtains
Ep =1λ
λ∫0
gζ
2ρζdx =
ρg
2λ
λ∫0
ζ2dx =116ρgH2 (2.23)
The average kinetic energy is found by integrating the velocity vector over one wave-
length and the whole depth, using Eq. (2.16).
Ek = 1λ
λ∫0
0∫−∞
ρ2u
2dzdx
= ρ2λ
λ∫0
0∫−∞
((∂φ∂x
)2+(∂φ∂z
)2)dzdx = 1
16ρgH2
(2.24)
The fact that Ek = Ep is called the principle of equipartition of energy. The total
energy becomes
E =18ρgH2
[J/m2
](2.25)
Comparing Eqs. (2.25) and (2.23) one realises that the total energy can be written
E =18ρgH2 = 2Ep =
ρg
λ
λ∫0
ζ2dx = ρgζ2 (2.26)
which means that the energy per square meter of ocean surface is proportional to
the mean square surface displacement.
The wave-energy flux per meter of wave crest is calculated as the group speed times
the average energy per square meter:
J = cgE =ρg2TH2
32π[W/m] (2.27)

CHAPTER 2. THEORY OF OCEAN WAVES 7
2.2 Ocean wave spectra
The sea surface is not regular and can never be described as a neat sine wave of
constant wavelength and wave height going in one direction. It is a complex process,
where waves of many different wavelengths, sizes and directions together form a
surface that at first sight appears completely random. To describe this process it
is common to use an energy spectrum function S(ω) that describes how the wave
energy is distributed over different frequency components2:
E = ρg
∫ ∞0
S(ω)dω (2.28)
Where S(ω) is a Bretschneider spectrum, defined as
S(ω) = Aω−5e−Bω−4
(2.29)
A and B are constants that are empirically determined to describe a specific sea
state.
Based on the sea spectrum the spectral moment of order j is defined as
mj =∫ ∞
0ωjS(ω)dω (2.30)
Using the spectral moments several useful statistical variables can be calculated. One
is the significant wave height Hs, defined as
Hs = Hm0 = 4√m0 [m] (2.31)
This measure is used because it corresponds well to the traditional measure of sig-
nificant wave height, which is the average of the 1/3 highest waves in the spectrum
(Hs = H1/3). Sometimes Hs is also referred to as Hm0 because it is based on m0,
the spectral moment of order 0.
When working with wave energy another useful variable is the energy period Te [9],
which is the average period of all the waves in the spectrum:
Te =
∫∞0 TS(T )dT∫∞0 S(T )dT
=2π∫∞0 ω−1S(ω)dω∫∞0 S(ω)dω
= 2πm−1
m0[s] (2.32)
2See [17] for a complete introduction to sea spectra.

CHAPTER 2. THEORY OF OCEAN WAVES 8
For fully developed seas a fairly accurate spectrum is the ISSC spectrum, which is a
two parameter spectrum based on significant wave height and period. Expressed in
terms of energy period it is written3 [17]
A = 4π4Γ(5/4)4T−4e H2
s
B = 16π4Γ(5/4)4T−4e
(2.33)
The average energy density of the sea state can be expressed in terms of Hs as
E = ρgm0 =ρg
16H2s [J/m2] (2.34)
In analogy with the energy flux J = cgE of a single wave, the energy flux of the whole
system (assuming deep water) can be calculated using the relations cg = g/(2ω),
(2.31) and (2.32) [9].
J = ρg
∫ ∞0
cg(ω)S(ω)dω =12ρg2m−1 =
ρg2
64πH2sTe [W/m] (2.35)
3Γ is the Gamma function, defined as Γ (x) =∞∫0
sx−1e−sds.
Chapter 3
Wave energy on worldwide route
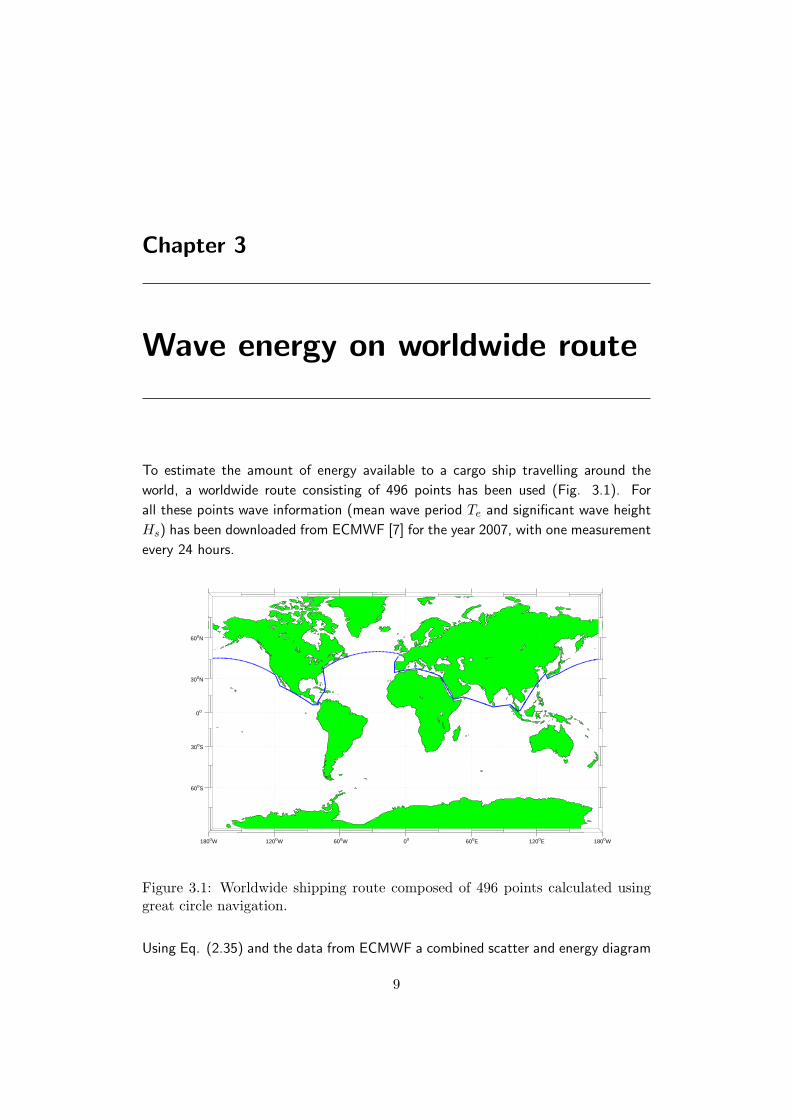
To estimate the amount of energy available to a cargo ship travelling around the
world, a worldwide route consisting of 496 points has been used (Fig. 3.1). For
all these points wave information (mean wave period Te and significant wave height
Hs) has been downloaded from ECMWF [7] for the year 2007, with one measurement
every 24 hours.
180oW 120oW 60oW 0o 60oE 120oE 180oW
60oS
30oS
0o
30oN
60oN
Figure 3.1: Worldwide shipping route composed of 496 points calculated usinggreat circle navigation.
Using Eq. (2.35) and the data from ECMWF a combined scatter and energy diagram
9

CHAPTER 3. WAVE ENERGY ON WORLDWIDE ROUTE 10
has been created (Fig. 3.2), showing that most of the wave energy along the route is
carried by waves of average period 7-11 s and significant wave height 1.5-3.5 m. The
average energy flux varies between 10 kW/m and 50 kW/m with a yearly average of
26 kW/m, as can be seen in Table (3.1).
0 2 4 6 8 10 120
1
2
3
4
5
6
7
Ann
ual e
nerg
y flu
x fo
r se
a st
ate
inte
rval
[kW
h/(m
×yea
r)]
200 kW/m
100 kW/m
50 kW/m
Energy period [s]
Energy diagram for global route
20 kW/m
10 kW/m
5 kW/m
2 kW/m
Sig
nific
ant w
ave
heig
ht [m
]
0
50
100
150
200
250
300
350
Figure 3.2: Combined scatter and energy diagram for worldwide route, measuringannual energy flux per meter of wave front (kWh/(m·year)) for each sea state,represented by a 1
8 ·18 [m·s] square. Lines are isolines of constant energy flux,
according to Eq. (2.35).
Since the wave spectrum generally has a wide directional spread and a ship route
does not follow the weather patterns, it has been assumed that a ship on average
has incoming sea equally from all directions. For a typical ship of length 220 m
and breadth 30 m, the average projected side to the incoming sea (averaged over a
rotation of 360 degrees) is Lp = (220 + 30) 2π = 160 m. With an average energy flux
of J = 26 kW/m this means that a ship following the worldwide route on average
will be exposed to an energy flow of roughly 4 MW.
Month Janu
ary
Febr
uary
Mar
ch
Apr
il
May
June
July
Aug
ust
Sept
embe
r
Oct
ober
Nov
embe
r
Dec
embe
r
year
avg.
J [kW/m] 49 49 34 28 15 12 12 11 15 21 29 41 26
Table 3.1: Average monthly energy flux along worldwide route during January-December 2007.

CHAPTER 3. WAVE ENERGY ON WORLDWIDE ROUTE 11
One of the motivations for this thesis work has been that large amounts of fuel could
be saved by capturing as little as one tenth of this available energy. For further
analyses the sea state Te 9 s, Hs 2.5 m has been chosen as a reference state for this
thesis, since it lies in the centre of the most dense region of Fig. 3.2.

Chapter 4
Wave energy conversion
Wave energy conversion (WEC) is the term for the conversion of ocean wave energy
into a desired form, usually electrical or mechanical energy. Numerous strategies for
wave energy conversion have over the years been proposed. Almost all of them can
be categorised into one of the following categories; overtopping devices, oscillating
bodies and oscillating water column. [4, 5, 16]
This chapter attempts to give a brief summary of the state of the art of WEC by
describing the working principles and listing the devices that have reached farthest in
their development. The purpose is to give an overview of the technology that exists
today, in order to evaluate what could possibly be fitted onboard a ship.
4.1 Overtopping devices
The basic principle of overtopping devices is to utilise the potential energy of the
waves. Incoming waves are focused by a set of channels and artificial beaches to make
them rise higher, thus redistributing the kinetic energy of the waves into potential
energy. The waves then spill over (overtop) into reservoirs with a water level above
the mean sea level (see Fig. 4.1). From the reservoirs the water then flows back
into the sea through turbines, converting the potential energy into usable electrical
or mechanical energy.
12

CHAPTER 4. WAVE ENERGY CONVERSION 13
4.1.1 Wave Dragon
The Wave Dragon [23] is a floating, slack moored overtopping device that has been
developed in Denmark by Wave Dragon ApS. It has large arms that focus the waves
up a ramp and into a reservoir, from where the water flows back through propeller
turbines connected to permanent magnet generators. A 20 kW prototype has been
successfully tested in Denmark (Fig. 4.2), and a pre-commercial demonstrator with
a rated capacity of 4-7 MW is currently being constructed, to be placed off the
Welsh coast. According to the developers, a Wave Dragon designed for a 24 kW/m
wave climate will have a total width of 260 m and a rated power of 4 MW, giving a
total efficiency of nearly 65%. This number probably reflects a maximum output at
optimal conditions.
Figure 4.1: Principles of energy capture in an overtopping device.c©Wave Dragon ApS

CHAPTER 4. WAVE ENERGY CONVERSION 14
Figure 4.2: Wave Dragon overtopping device prototype. The wave reflectors (top,bottom left) focus the waves onto the ramp and into the reservoir (bottom right).c©Wave Dragon ApS & Earth-vision.biz

CHAPTER 4. WAVE ENERGY CONVERSION 15
4.1.2 Sea Slot-cone Generator
Another type of overtopping device is the Sea Slot-cone Generator (SSG) [15], which
is a shore-based installation that uses reservoirs at several levels to extract energy
from waves of different heights. The water is collected in the reservoirs and then flows
out through a Multi-Stage Turbine (MST) that consists of several turbines staggered
concentrically inside each other, driving a common shaft. The MST makes use of
the different levels of water head in the reservoirs, and is able to extract power even
at low water heads. Estimated overall efficiency of the SSG is 10-26% depending on
wave conditions.
Figure 4.3: The Sea Slot-cone Generator developed in Norway. It allows wavesof different height to overtop into reservoirs at three different levels (left). Waterthen flows out through a multi-stage turbine (right). From [15].
CHAPTER 4. WAVE ENERGY CONVERSION 16
4.2 Oscillating water column
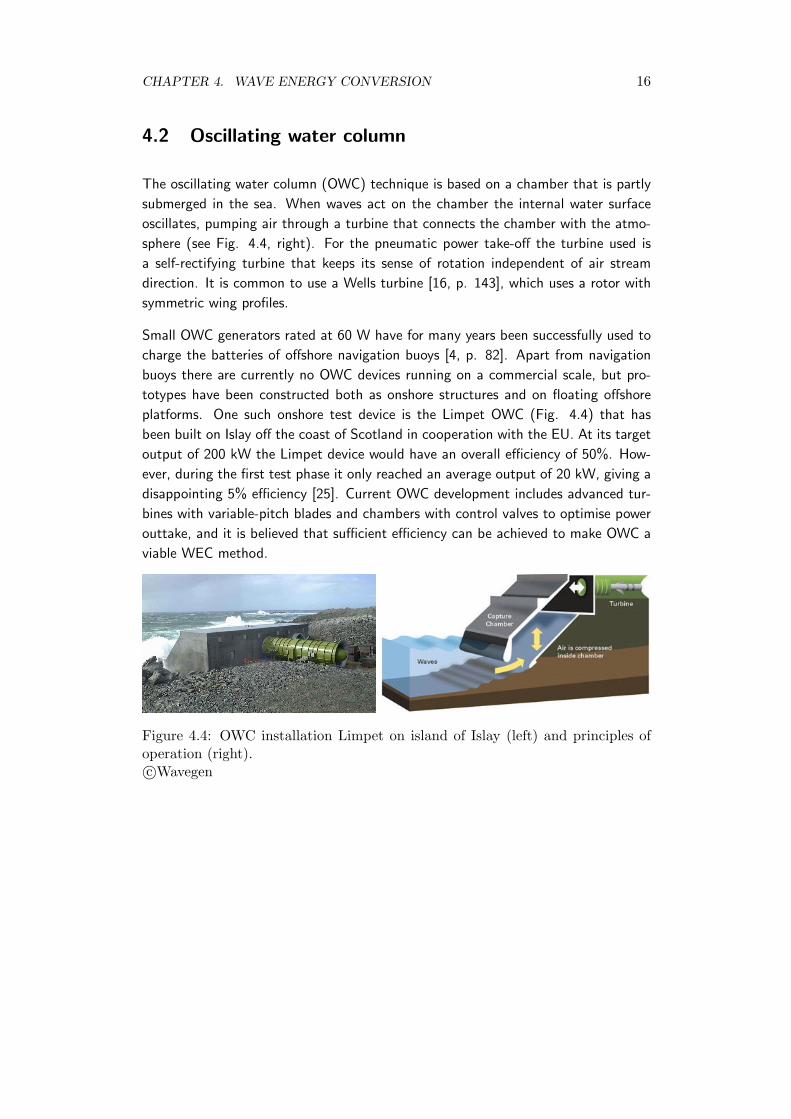
The oscillating water column (OWC) technique is based on a chamber that is partly
submerged in the sea. When waves act on the chamber the internal water surface
oscillates, pumping air through a turbine that connects the chamber with the atmo-
sphere (see Fig. 4.4, right). For the pneumatic power take-off the turbine used is
a self-rectifying turbine that keeps its sense of rotation independent of air stream
direction. It is common to use a Wells turbine [16, p. 143], which uses a rotor with
symmetric wing profiles.
Small OWC generators rated at 60 W have for many years been successfully used to
charge the batteries of offshore navigation buoys [4, p. 82]. Apart from navigation
buoys there are currently no OWC devices running on a commercial scale, but pro-
totypes have been constructed both as onshore structures and on floating offshore
platforms. One such onshore test device is the Limpet OWC (Fig. 4.4) that has
been built on Islay off the coast of Scotland in cooperation with the EU. At its target
output of 200 kW the Limpet device would have an overall efficiency of 50%. How-
ever, during the first test phase it only reached an average output of 20 kW, giving a
disappointing 5% efficiency [25]. Current OWC development includes advanced tur-
bines with variable-pitch blades and chambers with control valves to optimise power
outtake, and it is believed that sufficient efficiency can be achieved to make OWC a
viable WEC method.
Figure 4.4: OWC installation Limpet on island of Islay (left) and principles ofoperation (right).c©Wavegen
CHAPTER 4. WAVE ENERGY CONVERSION 17
4.3 Oscillating bodies
Most of the WEC concepts being developed today consist of bodies that move in
one or more degrees of freedom in the sea, absorbing the energy of the waves.
Physically, to absorb energy from a wave means to generate a wave that interferes
destructively with the original wave [8, p. 196], thereby reducing its amplitude.
Hence, an oscillating body WEC device must be an efficient wave maker that creates
a cancelling wave with its motion.
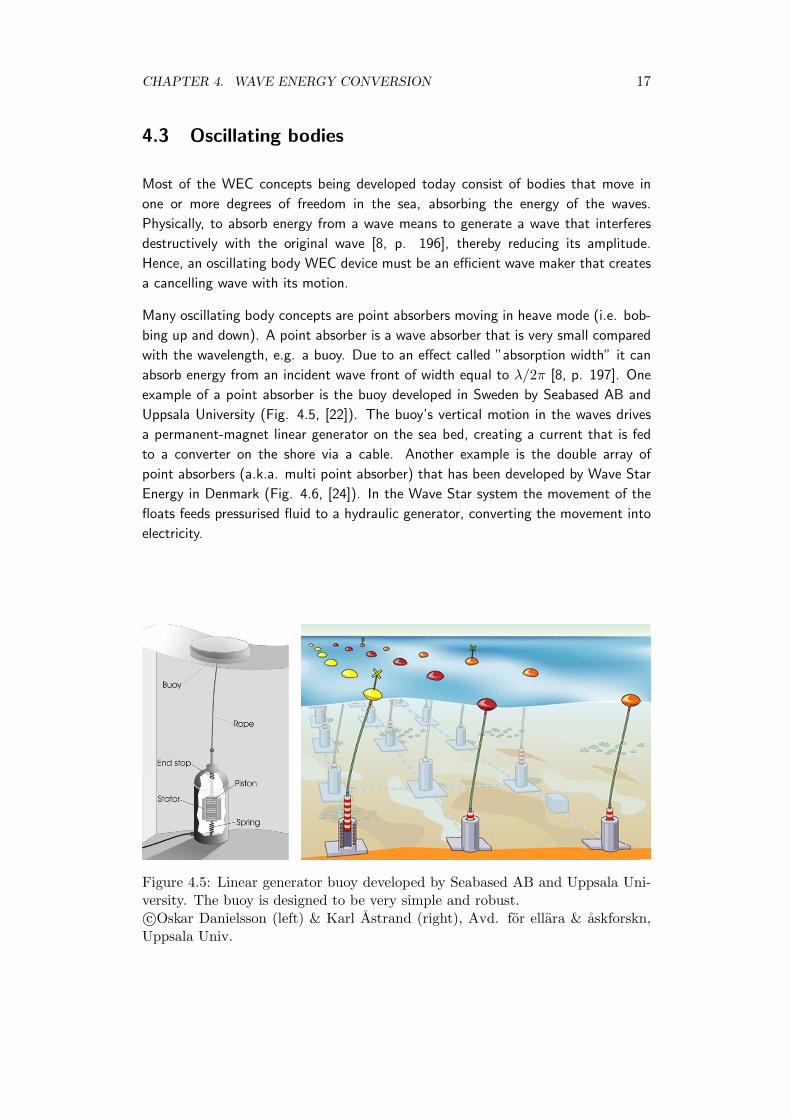
Many oscillating body concepts are point absorbers moving in heave mode (i.e. bob-
bing up and down). A point absorber is a wave absorber that is very small compared
with the wavelength, e.g. a buoy. Due to an effect called ”absorption width” it can
absorb energy from an incident wave front of width equal to λ/2π [8, p. 197]. One
example of a point absorber is the buoy developed in Sweden by Seabased AB and
Uppsala University (Fig. 4.5, [22]). The buoy’s vertical motion in the waves drives
a permanent-magnet linear generator on the sea bed, creating a current that is fed
to a converter on the shore via a cable. Another example is the double array of
point absorbers (a.k.a. multi point absorber) that has been developed by Wave Star
Energy in Denmark (Fig. 4.6, [24]). In the Wave Star system the movement of the
floats feeds pressurised fluid to a hydraulic generator, converting the movement into
electricity.
Figure 4.5: Linear generator buoy developed by Seabased AB and Uppsala Uni-versity. The buoy is designed to be very simple and robust.c©Oskar Danielsson (left) & Karl Astrand (right), Avd. for ellara & askforskn,
Uppsala Univ.
CHAPTER 4. WAVE ENERGY CONVERSION 18
Other examples of oscillating body devices that have come far in their development
are the Pelamis (Fig. 4.7, [19]) and the Oyster (Fig. 4.8, [2]). The Pelamis is the
first WEC device in the world to be commercialised, with three 750 kW-devices now
operating off the Portuguese coast and more being planned. The Oyster has suc-
cessfully been tested in full scale at the New and Renewable Energy Centre (NaREC)
near Newcastle.
CHAPTER 4. WAVE ENERGY CONVERSION 19
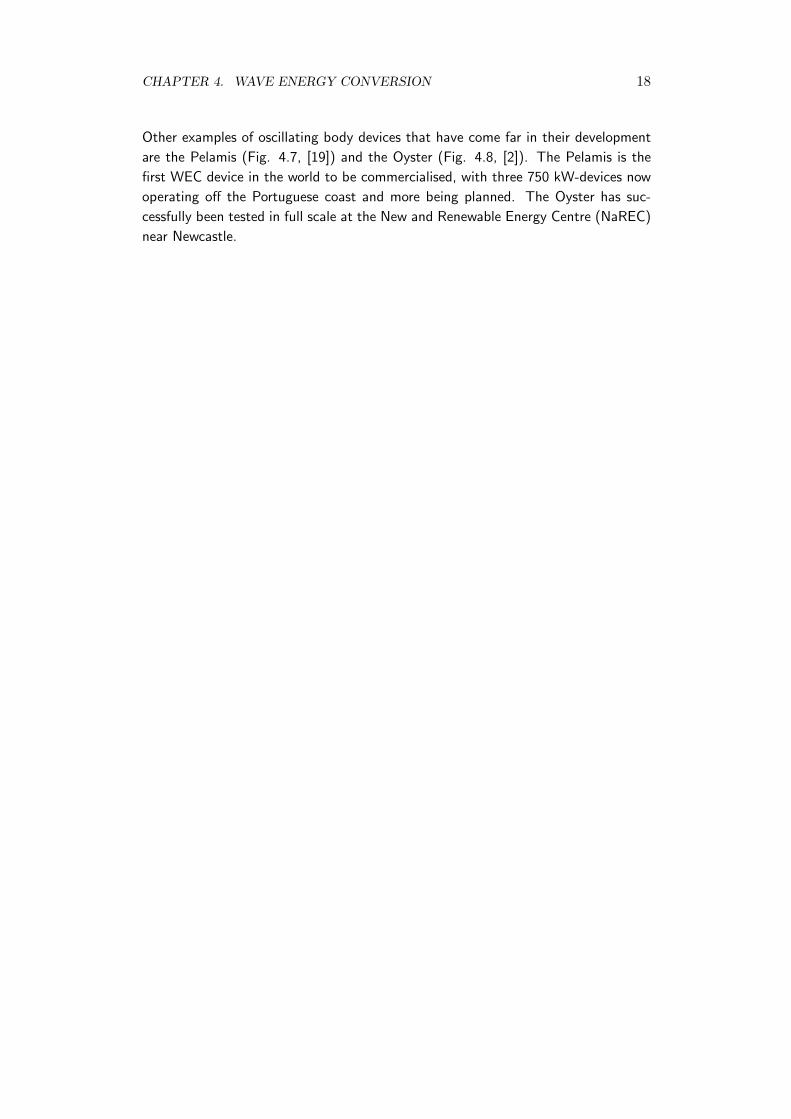
Figure 4.6: The Wave Star multi point absorber generates electricity continuouslyby combining multiple floats in an array several wavelengths long. The motion ofthe floats pumps fluid into a common transmission system that drives a hydraulicgenerator. c©Wave Star Energy
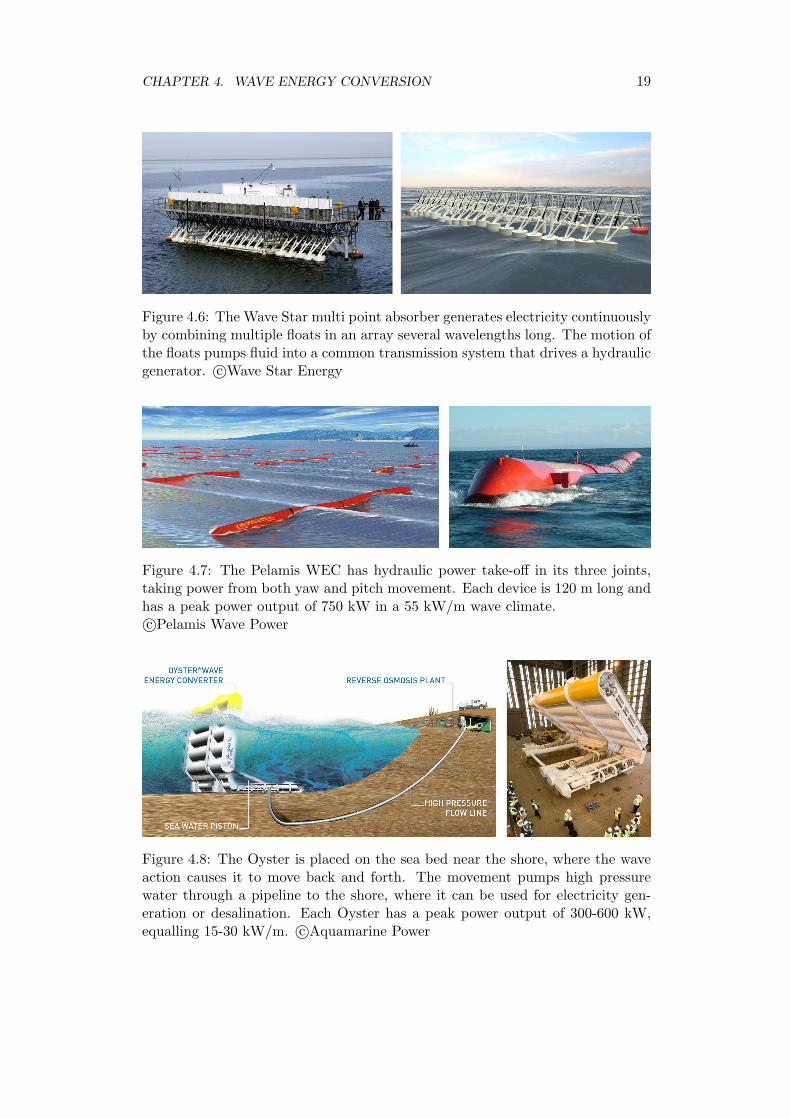
Figure 4.7: The Pelamis WEC has hydraulic power take-off in its three joints,taking power from both yaw and pitch movement. Each device is 120 m long andhas a peak power output of 750 kW in a 55 kW/m wave climate.c©Pelamis Wave Power
Figure 4.8: The Oyster is placed on the sea bed near the shore, where the waveaction causes it to move back and forth. The movement pumps high pressurewater through a pipeline to the shore, where it can be used for electricity gen-eration or desalination. Each Oyster has a peak power output of 300-600 kW,equalling 15-30 kW/m. c©Aquamarine Power

CHAPTER 4. WAVE ENERGY CONVERSION 20
4.4 Thrust generating foils
One method of wave energy propulsion that has received a lot of attention is by using
a hydrofoil that undergoes an oscillating motion below the surface, thus generating
thrust. This mimics the way that birds, fishes and insects generate thrust by moving
wings and fins. The difference is that the thrust generation by the hydrofoil is
completely passive; wave energy is absorbed as ship motion kinetic energy, which in
turn is converted into thrust by the hydrofoil that moves with the ship.
The conversion of wave energy into thrust by a foil was named ”wave devouring
propulsion” (WDP) by Terao [12]. Another term for the same technology is ”passive
foil propeller”. Early experimental and analytical studies in the 1980’s suggested
that a WDP system on a ship could generate thrust in both following and head sea
[12, 21].
The concept is in itself very attractive, since foils mounted at the bow and stern of
a ship would reduce its rolling and pitching motion, and at the same time generate
thrust. Thus fuel would be saved both by reducing ship motions and by the direct
forward thrust produced by the foils. To further improve results the foils could be
controlled by an active system that adjusted their angle of attack to avoid stall and
produce maximum thrust at all times.
Figure 4.9: Wallenius’ conceptual emission-free vessel E/S Orcelle, equipped withfins for wave energy propulsion. Some results indicate that fins would not besuitable on a ship of the Orcelle’s length. c©Wallenius
Chapter 5
Proposed technologies
This chapter presents the different concepts for wave energy propulsion that have
been considered during this thesis work. All the concepts are adaptations of existing
technologies, and all have been chosen in discussion with engineers at Wallenius as
concepts that could be feasible to install on a PCTC. A total of 4 concepts have
been studied, but the bow overtopping is the one that has been most thoroughly
analysed. The analyses have been carried out with main ship data from Wallenius’
PCTC M/V Fedora, described in Table 5.1.
Lpp Breadth Draft CB U PE216 m 32.3 m 9.5 m 0.62 18 kts 8.5 MW
Table 5.1: Ship data for M/V Fedora used in study. PE is the engine powerrequired at 18 knots.
5.1 Bow overtopping
The motion of the sea surface relative the side of the ship is a superposition of the
motion of the sea surface and the pitch and heave motions of the ship. This relative
motion is at its largest at the bow of the ship. By installing an overtopping device
at the bow, this large motion amplitude could be used to generate electrical power.
A possible positive side-effect could be a slight damping of the pitching motion.
In this thesis work an overtopping device installed at the bow of a Wallenius PCTC has
21
CHAPTER 5. PROPOSED TECHNOLOGIES 22
been modelled by using the response amplitude operators1 (i.e. transfer functions)
Y3(ω) for heave and Y5(ω) for pitch in an ISSC sea state S(ω) (see Eqs. 2.29 and
2.33). The transfer functions have been calculated by using the linear strip method,
as implemented in the software package Tribon M3.
5.1.1 Ship motions
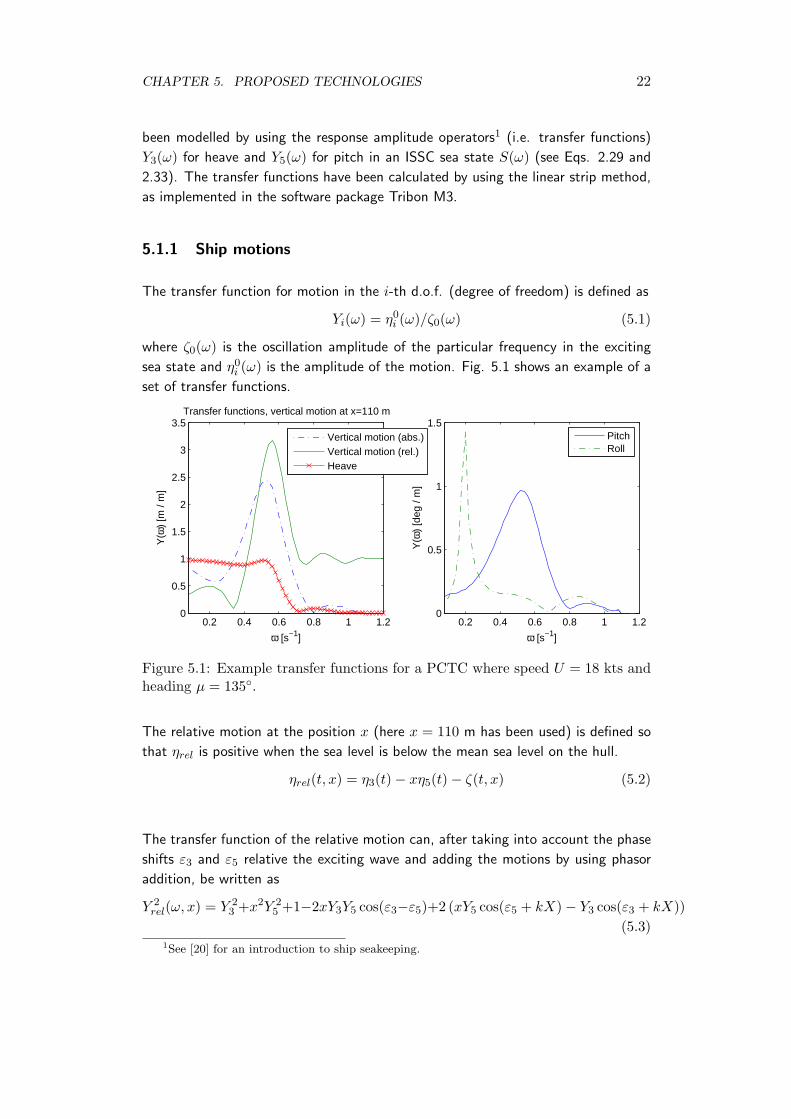
The transfer function for motion in the i-th d.o.f. (degree of freedom) is defined as
Yi(ω) = η0i (ω)/ζ0(ω) (5.1)
where ζ0(ω) is the oscillation amplitude of the particular frequency in the exciting
sea state and η0i (ω) is the amplitude of the motion. Fig. 5.1 shows an example of a
set of transfer functions.
0.2 0.4 0.6 0.8 1 1.20
0.5
1
1.5
2
2.5
3
3.5Transfer functions, vertical motion at x=110 m
ω [s−1]
Y(ω
) [m
/ m
]
Vertical motion (abs.)Vertical motion (rel.)Heave
0.2 0.4 0.6 0.8 1 1.20
0.5
1
1.5Y
(ω)
[deg
/ m
]
ω [s−1]
PitchRoll
Figure 5.1: Example transfer functions for a PCTC where speed U = 18 kts andheading µ = 135◦.
The relative motion at the position x (here x = 110 m has been used) is defined so
that ηrel is positive when the sea level is below the mean sea level on the hull.
ηrel(t, x) = η3(t)− xη5(t)− ζ(t, x) (5.2)
The transfer function of the relative motion can, after taking into account the phase
shifts ε3 and ε5 relative the exciting wave and adding the motions by using phasor
addition, be written as
Y 2rel(ω, x) = Y 2
3 +x2Y 25 +1−2xY3Y5 cos(ε3−ε5)+2 (xY5 cos(ε5 + kX)− Y3 cos(ε3 + kX))
(5.3)1See [20] for an introduction to ship seakeeping.

CHAPTER 5. PROPOSED TECHNOLOGIES 23
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.30
10
20
30
Sη (ω
)
ω [s−1]
Response energy spectrum, vertical motion at x=110 m
Absolute motionRelative motion
0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.30
1
2
3
Sζ(ω
)
ω [s−1]
Sea state energy spectrum Hs=4.0, T
w=9.0
Figure 5.2: Example of energy spectrum for a sea state and corresponding re-sponse spectrum for absolute and relative motion at bow.
where kX is the phase shift due to the heading µ relative the direction of the waves
X = x cos(µ) (5.4)
By combining the transfer function of a motion with the sea state energy spectrum,
the response energy spectrum of the motion for the actual sea state can be calculated
as
Sηi (ω) = Y 2i (ω)S(ω) (5.5)
Once the response spectrum is known, the standard deviation, or RMS (root mean
square) ηrmsi , of the motion can be calculated as
σi =
√∫ ∞0
Sηi (ω)dω (5.6)
5.1.2 Overtopping model
The overtopping mechanism has here been modelled as an inflow opening and a
reservoir located at zin (in meters above mean water level). The vertical distance h
from the inflow opening up to the water surface is defined as
h(t, x) = −ηrel(t, x)− zin [m] (5.7)
CHAPTER 5. PROPOSED TECHNOLOGIES 24
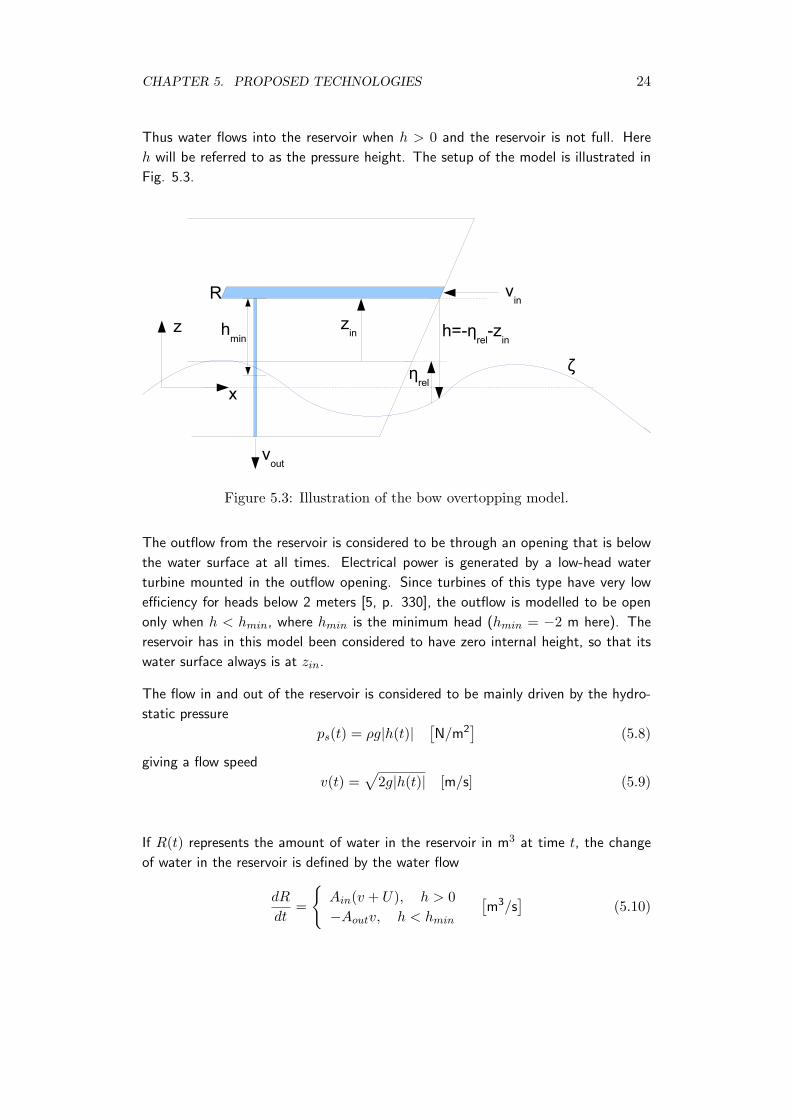
Thus water flows into the reservoir when h > 0 and the reservoir is not full. Here
h will be referred to as the pressure height. The setup of the model is illustrated in
Fig. 5.3.
Figure 5.3: Illustration of the bow overtopping model.
The outflow from the reservoir is considered to be through an opening that is below
the water surface at all times. Electrical power is generated by a low-head water
turbine mounted in the outflow opening. Since turbines of this type have very low
efficiency for heads below 2 meters [5, p. 330], the outflow is modelled to be open
only when h < hmin, where hmin is the minimum head (hmin = −2 m here). The
reservoir has in this model been considered to have zero internal height, so that its
water surface always is at zin.
The flow in and out of the reservoir is considered to be mainly driven by the hydro-
static pressure
ps(t) = ρg|h(t)|[N/m2
](5.8)
giving a flow speed
v(t) =√
2g|h(t)| [m/s] (5.9)
If R(t) represents the amount of water in the reservoir in m3 at time t, the change
of water in the reservoir is defined by the water flow
dR
dt=
{Ain(v + U), h > 0−Aoutv, h < hmin
[m3/s
](5.10)

CHAPTER 5. PROPOSED TECHNOLOGIES 25
The ship speed U has been added to the inflow speed driven by hydrostatic pressure
to include the effect of the ship’s forward speed relative to the sea water. Ain/out is
the area of the inflow and outflow openings, respectively, here set to 10 m2 each.
The available power of the outflow, before considering efficiency of power take-off
systems, is calculated as the volume outflow times the driving pressure
P (t) = Aoutv(t)ps(t) [W], h < hmin (5.11)
In terms of the pressure height
P = ρg√
2gAouth3/2 (5.12)
The relative motion ηrel between the surface and the inflow opening is normally
distributed, and therefore the probability density function (pdf) of h can be obtained
from the normal distribution by substituting ηrel using Eq. 5.7
f(h) =1
σrel√
2πexp
(−(h+ zin)2
2σ2rel
)(5.13)
Using f(h) the probabilities of in- and outflow can be written as2
Πin =∫ ∞
0f(h)dh =
12
(1− erf
(zin
σrel√
2
))(5.14)
Πout =∫ hmin
−∞f(h)dh =
12
(1 + erf
(zin − hmin
σrel√
2
))(5.15)
The outflow power depends on h3/2, here defined as the power height w
w = h3/2, h < hmin (5.16)
The pdf f(w) is obtained from (5.13) by variable substitution with (5.16) and nor-
malising with Πout
f(w) =1
Πout
√2
9πw−1/3
σrelexp
(−(w2/3 − zin)2
2σ2rel
)(5.17)
Similarly, the probability distribution functions for the inflow and outflow speeds are
obtained by substituting (5.9) into (5.13)
f(vin) =1
Πin
vin − Uσrelg
√2π
exp
−(
(vin − U)2 /2g − zin)2
2σ2rel
, U ≤ vin ≤ ∞ (5.18)
f(vout) =1
Πout
vout
σrelg√
2πexp
(−(v2
out/2g − zin)2
2σ2rel
),√
2ghmin ≤ vout ≤ ∞ (5.19)
2erf(x) is the error function, defined as erf(x) = 2√π
∫ x0
e−t2dt.

CHAPTER 5. PROPOSED TECHNOLOGIES 26
The in- and outflow pdf’s are only defined when h > 0 and h < hmin, respectively,
and therefore normalised with Πin and Πout.
Using the distribution functions mentioned above, important time averages for the
overtopping process can be calculated by noting that a variable x with pdf f(x),
defined ∀x ∈ R, has an average value
x =∫ ∞−∞
xf(x)dx (5.20)
The time average of the flow changing the reservoir level can thus be calculated as
dR
dt= ΠinAinvin −ΠoutAoutvout (5.21)
The reservoir water level will build up to its maximum if dRdt > 0. In that case there
will always be water in the reservoir, and the mean power production will only depend
on the outflow
P = Πoutρg√
2gAoutw (5.22)
If dRdt < 0, the reservoir will empty faster then it gets filled, and the power production
will depend on the inflow. Numerically, this means that the outflow area must be
adjusted so that dRdt = 0, since water cannot flow out from an empty reservoir. This
gives
P = Πoutρg√
2gAoutw (5.23)
where Aout is the adjusted outflow area
Aout =Πinvin
ΠoutvoutAin (5.24)
Therefore, the power production can be expressed as
P =
{ρg√
2gΠoutAoutw , ΠinAinvin > ΠoutAoutvoutρg√
2gΠinAin (vin/vout)w , ΠinAinvin < ΠoutAoutvout(5.25)
As can be observed in Fig. 5.4 (line ”Calculated”), this function is piecewise smooth
with a sharp maximum. The maximum occurs at the point where dRdt = 0, i.e. when
the average outflow is of the same magnitude as the average inflow. A time-domain
simulation of the same model has also been run (Fig. 5.4, line ”Simulated”), by
modelling the behaviour of the reservoir for a time series of the relative motion. The
results coincide well with the analytic model except for a slight underestimation in the
second half of the curve, probably because of effects that occur when the reservoir
is completely empty for some time periods.
CHAPTER 5. PROPOSED TECHNOLOGIES 27
0 0.5 1 1.5 2 2.5 3 3.5 40
100
200
300
400
500
600
zin
[m]
Tim
e av
erag
e of
out
flow
pow
er [k
W]
Power vs zin
. Ship speed U=18 kts. Sea state Hs=2.5 m, T
e=9.0 s.
SimulatedCalculated
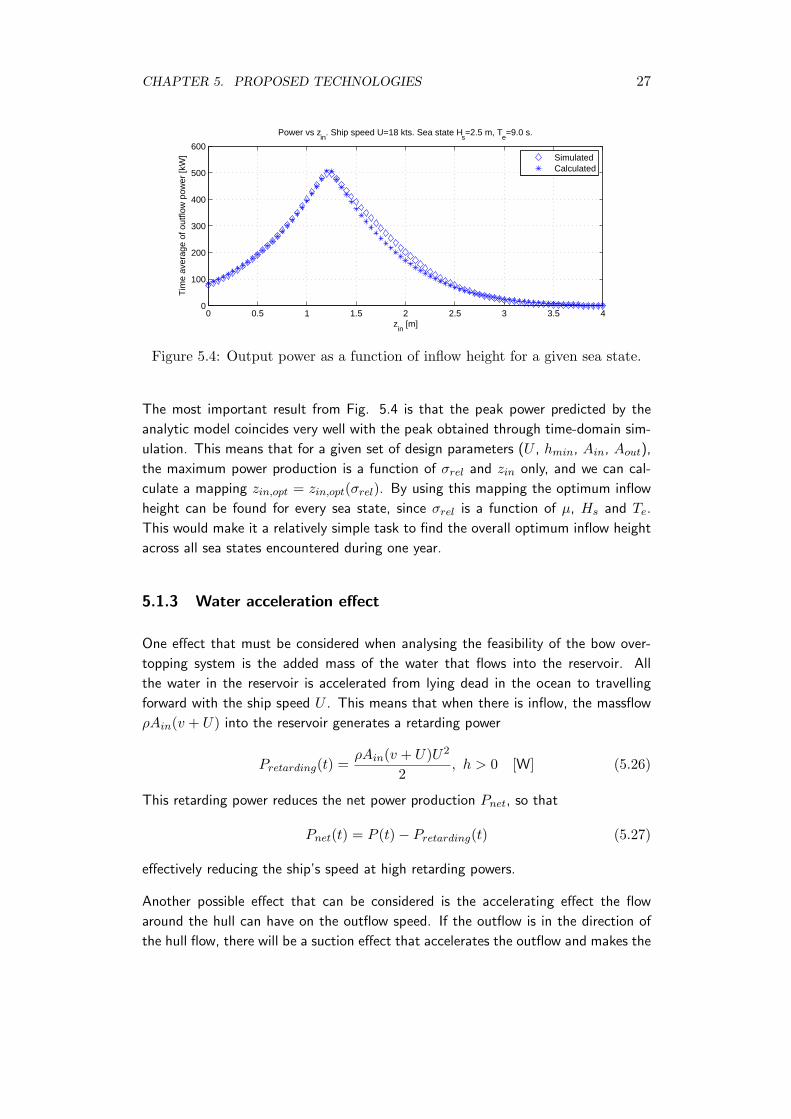
Figure 5.4: Output power as a function of inflow height for a given sea state.
The most important result from Fig. 5.4 is that the peak power predicted by the
analytic model coincides very well with the peak obtained through time-domain sim-
ulation. This means that for a given set of design parameters (U , hmin, Ain, Aout),
the maximum power production is a function of σrel and zin only, and we can cal-
culate a mapping zin,opt = zin,opt(σrel). By using this mapping the optimum inflow
height can be found for every sea state, since σrel is a function of µ, Hs and Te.
This would make it a relatively simple task to find the overall optimum inflow height
across all sea states encountered during one year.
5.1.3 Water acceleration effect
One effect that must be considered when analysing the feasibility of the bow over-
topping system is the added mass of the water that flows into the reservoir. All
the water in the reservoir is accelerated from lying dead in the ocean to travelling
forward with the ship speed U . This means that when there is inflow, the massflow
ρAin(v + U) into the reservoir generates a retarding power
Pretarding(t) =ρAin(v + U)U2
2, h > 0 [W] (5.26)
This retarding power reduces the net power production Pnet, so that
Pnet(t) = P (t)− Pretarding(t) (5.27)
effectively reducing the ship’s speed at high retarding powers.
Another possible effect that can be considered is the accelerating effect the flow
around the hull can have on the outflow speed. If the outflow is in the direction of
the hull flow, there will be a suction effect that accelerates the outflow and makes the

CHAPTER 5. PROPOSED TECHNOLOGIES 28
water flow out of the reservoir faster than when driven by hydrostatic pressure, thus
increasing the produced power. The theoretical maximum occurs when the outflow
is accelerated by the ship speed U
P (t) = Aout(v + U)ps, h < hmin [W] (5.28)
CHAPTER 5. PROPOSED TECHNOLOGIES 29
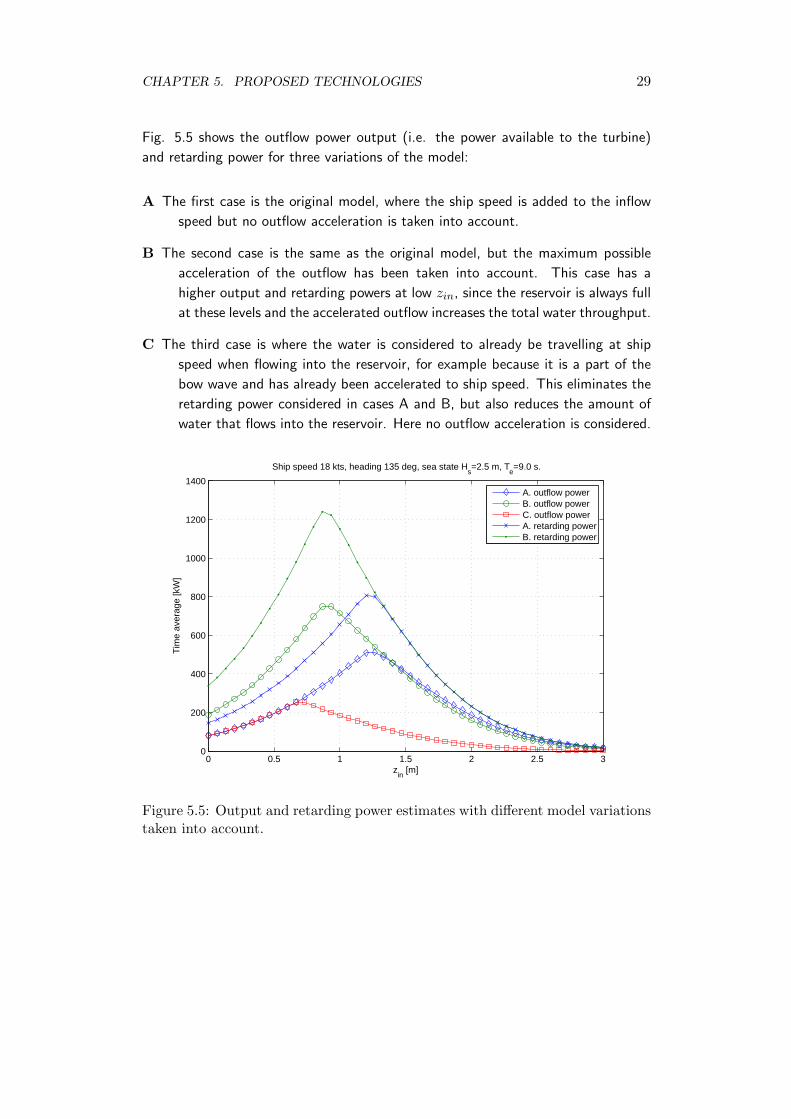
Fig. 5.5 shows the outflow power output (i.e. the power available to the turbine)
and retarding power for three variations of the model:
A The first case is the original model, where the ship speed is added to the inflow
speed but no outflow acceleration is taken into account.
B The second case is the same as the original model, but the maximum possible
acceleration of the outflow has been taken into account. This case has a
higher output and retarding powers at low zin, since the reservoir is always full
at these levels and the accelerated outflow increases the total water throughput.
C The third case is where the water is considered to already be travelling at ship
speed when flowing into the reservoir, for example because it is a part of the
bow wave and has already been accelerated to ship speed. This eliminates the
retarding power considered in cases A and B, but also reduces the amount of
water that flows into the reservoir. Here no outflow acceleration is considered.
0 0.5 1 1.5 2 2.5 30
200
400
600
800
1000
1200
1400
zin
[m]
Tim
e av
erag
e [k
W]
Ship speed 18 kts, heading 135 deg, sea state Hs=2.5 m, T
e=9.0 s.
A. outflow powerB. outflow powerC. outflow powerA. retarding powerB. retarding power
Figure 5.5: Output and retarding power estimates with different model variationstaken into account.
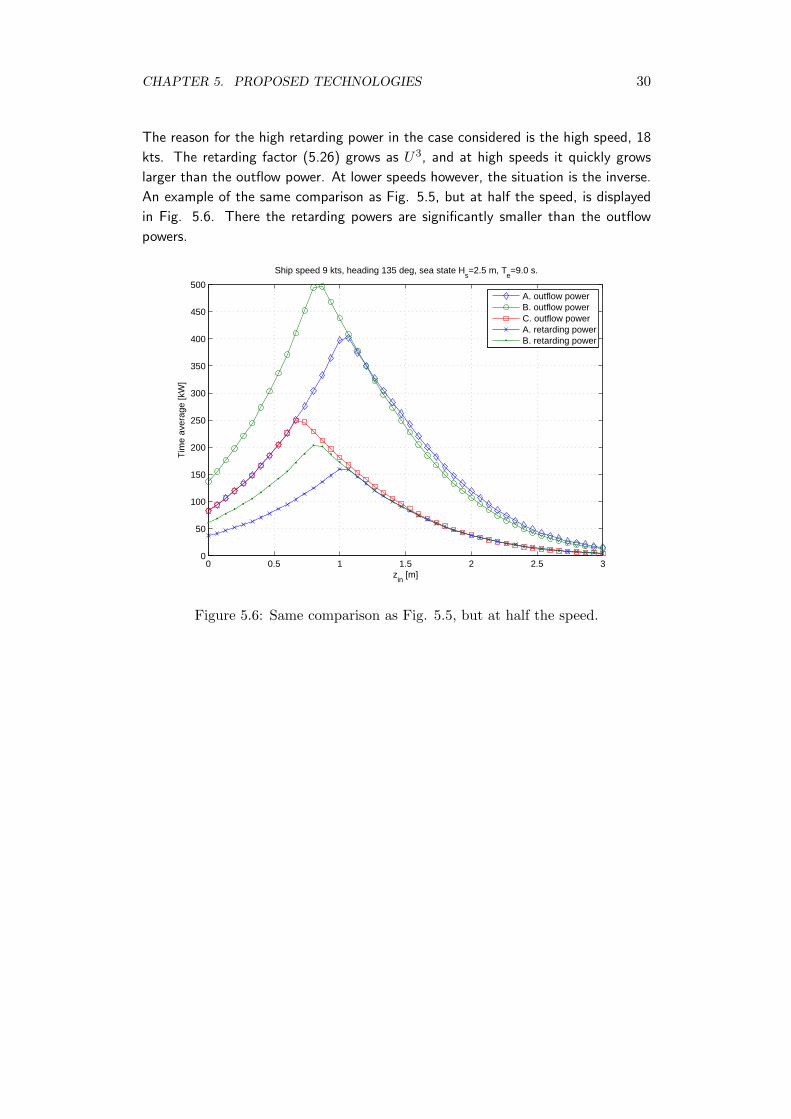
CHAPTER 5. PROPOSED TECHNOLOGIES 30
The reason for the high retarding power in the case considered is the high speed, 18
kts. The retarding factor (5.26) grows as U3, and at high speeds it quickly grows
larger than the outflow power. At lower speeds however, the situation is the inverse.
An example of the same comparison as Fig. 5.5, but at half the speed, is displayed
in Fig. 5.6. There the retarding powers are significantly smaller than the outflow
powers.
0 0.5 1 1.5 2 2.5 30
50
100
150
200
250
300
350
400
450
500
zin
[m]
Tim
e av
erag
e [k
W]
Ship speed 9 kts, heading 135 deg, sea state Hs=2.5 m, T
e=9.0 s.
A. outflow powerB. outflow powerC. outflow powerA. retarding powerB. retarding power
Figure 5.6: Same comparison as Fig. 5.5, but at half the speed.

CHAPTER 5. PROPOSED TECHNOLOGIES 31
5.1.4 Conclusions
As Fig. 5.5 clearly shows, the retarding power considered is significantly larger than
the outflow power regardless of outflow acceleration. This is a clear overestimate,
partly because some of the water has already been accelerated by the hull before
flowing in, and partly because the original added mass of the bow is reduced since
there is a reduction of the area that pushes water forward and to the side. However,
the outflow power is also a theoretical maximum that will be greatly reduced once
turbines and generators are included in the model.
One can interpret the results of the model by considering a floating overtopping
device, such as the Wave Dragon, that is equipped with an electric motor driven
by the generators on the device. At speeds close to zero the output power will be
larger than the retarding power, and the device will accelerate. But at a certain (and
probably very low) speed there will be an equilibrium, and the device will not move
any faster.
CHAPTER 5. PROPOSED TECHNOLOGIES 32
5.2 Thrust generating foils
The WDP concept described in section 4.4 has been analysed both by a literature
survey of earlier studies and by a numerical study using the simplified model described
below.
5.2.1 Modelling
To fully model a ship equipped with WDP, one must couple the equations of motions
of the ship with the behaviour of the oscillating foil, which is a fairly complicated
task. The hydrodynamics of foils oscillating in heave and pitch near a free surface is a
subject of ongoing research, and beyond the scope of this study. (One treatment of a
rigid oscillating foil near a free surface can be found in [10].) A simplified approach is
to model the foil by using steady-state foil theory, with fluid speed and angle of attack
determined by using linear wave theory together with the ship’s transfer functions for
heave and pitch. This approach disregards the foil’s damping effect on ship motions
and the wave-making effects of the oscillating foil, but is still interesting because of
its simple implementation.
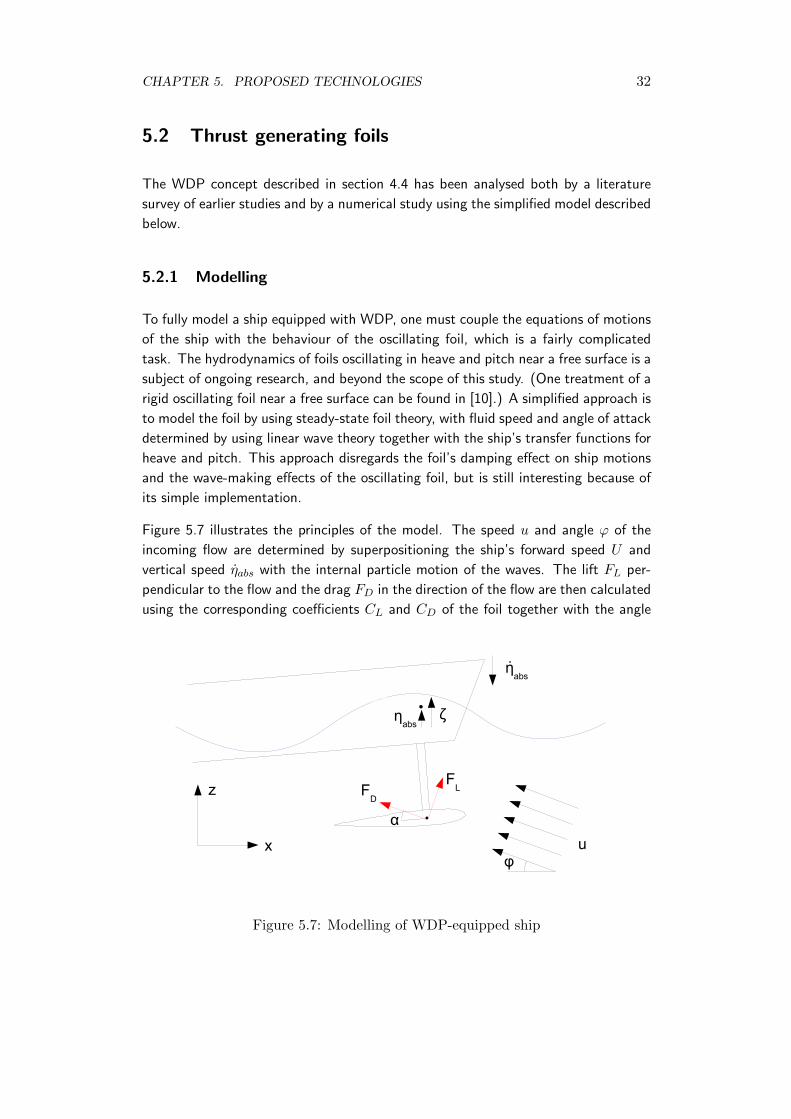
Figure 5.7 illustrates the principles of the model. The speed u and angle ϕ of the
incoming flow are determined by superpositioning the ship’s forward speed U and
vertical speed ηabs with the internal particle motion of the waves. The lift FL per-
pendicular to the flow and the drag FD in the direction of the flow are then calculated
using the corresponding coefficients CL and CD of the foil together with the angle
-0.50
0.51
1.5
-0.5
0
0.5
u
FLF
D
ζηabs
α
ηabs
φx
z
Figure 5.7: Modelling of WDP-equipped ship

CHAPTER 5. PROPOSED TECHNOLOGIES 33
of attack α, determined by the foil’s control system. The horizontal components of
FL and FD are then used to calculate the thrust and drag of the foil in the direction
of travel. The lift and drag are calculated as
FL =12ρu2AfCL (α) (5.29)
FD =12ρu2AfCD (α) (5.30)
where Af is the area of the foil [1].
5.2.2 Studies
One implementation of the simplified approach described above is a DNV study from
1989 [13], which considers a 300 m vessel sailing the route Chile-Japan at 13 knots.
The vessel in the study is equipped with bow and stern foils with areas 2.0% and
1.5% of the total water plane area (WPA), respectively. According to the study, the
foils would give a propulsive effect of 1.6 MW and a fuel saving of 21%, on average
for all headings. However, this study does not analyse the resistance increase due
to the appended foils or the motions of the ship in waves, but rather adds 15% (1
MW) to the still water resistance to account for all factors. A quick estimate of the
foil drag alone (based on CD) sets it at minimum 0.4 MW without waves, i.e at 0◦
angle of attack, and it would definitely be larger in waves. The fuel saving of 21%
is calculated as the ratio of the foil propulsive power at 13 knots and the effective
power normally needed to maintain that speed (with the 15% increase). Thus it
does not take into account the resistance increase from the foils. On the other hand,
the foils will most likely dampen the pitching of the ship, reducing the wave-induced
resistance compared to the original configuration.
More recently, WDP in the form of bow wings has been extensively studied by Naito
[18]. However, this wave energy conversion system seems to be ineffective when the
wavelength is shorter than the ship’s length (λ/L < 1), according to Naito. A typical
PCTC has a length of about 200 meters, meaning that WDP would only be effective
for wave periods above 11 seconds. Mean wave periods above 11 seconds occur less
than 5% of the year on the worldwide route [7, 11], and thus WDP seems to be
unsuitable for ships this large. An experimental study from CUT by Bergholtz and
Stocks [3] also concludes that when λ/L < 1 the foil thrust is too small to overcome
the added resistance due to the foils.
5.2.3 Numerical experiment
An implementation of the simplified model described in 5.2.1 has been made in
MATLAB during this thesis work, simulating a T-shaped foil mounted 10 meters
CHAPTER 5. PROPOSED TECHNOLOGIES 34
below the surface at the bow of a PCTC. The depth of 10 meters was chosen so
that the risk of foil slamming would be small even in large waves. It has some effect
on the results since the particle motions of the waves are largest near the surface,
making deep mounted foils slightly less effective. A symmetrical NACA 0012 profile
with aspect ratio 4 was used, since it is the kind used in [18] and [13]. It is also
similar to the NACA 0018 profile used by [3]. The total foil area was set to 1% of
the WPA, and the foil was considered to be controlled by an optimal control system.
Optimality was here defined as the angle of attack that maximised the net propulsive
force.
The 2D panel code XFoil [6] was used to derive the section lift and drag coefficients
(cl and cd) of the profile. The foil coefficients (CL and CD) where then derived from
the section coefficients by applying aspect ratio effects, as described in [1]. XFoil
is considered to give relatively accurate lift and drag predictions, but it is likely to
overestimate the stall angle. No experimental results were however available for the
high Reynolds number encountered here (Re 3e7), which is why the XFoil coefficients
have been applied without modification. Since the foil was considered to have an
optimal control system it would not come near the stall angle anyway, since the
optimal lift/drag ration of the foil was observed to be well below the stall angle.
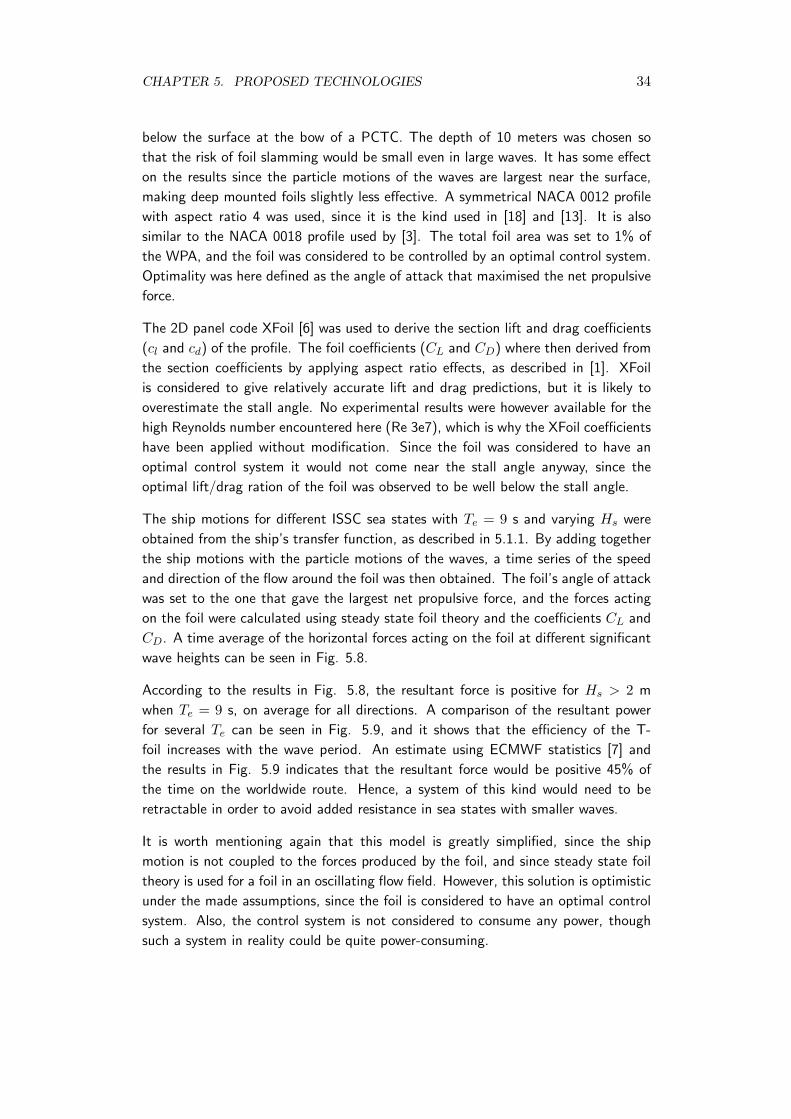
The ship motions for different ISSC sea states with Te = 9 s and varying Hs were
obtained from the ship’s transfer function, as described in 5.1.1. By adding together
the ship motions with the particle motions of the waves, a time series of the speed
and direction of the flow around the foil was then obtained. The foil’s angle of attack
was set to the one that gave the largest net propulsive force, and the forces acting
on the foil were calculated using steady state foil theory and the coefficients CL and
CD. A time average of the horizontal forces acting on the foil at different significant
wave heights can be seen in Fig. 5.8.
According to the results in Fig. 5.8, the resultant force is positive for Hs > 2 m
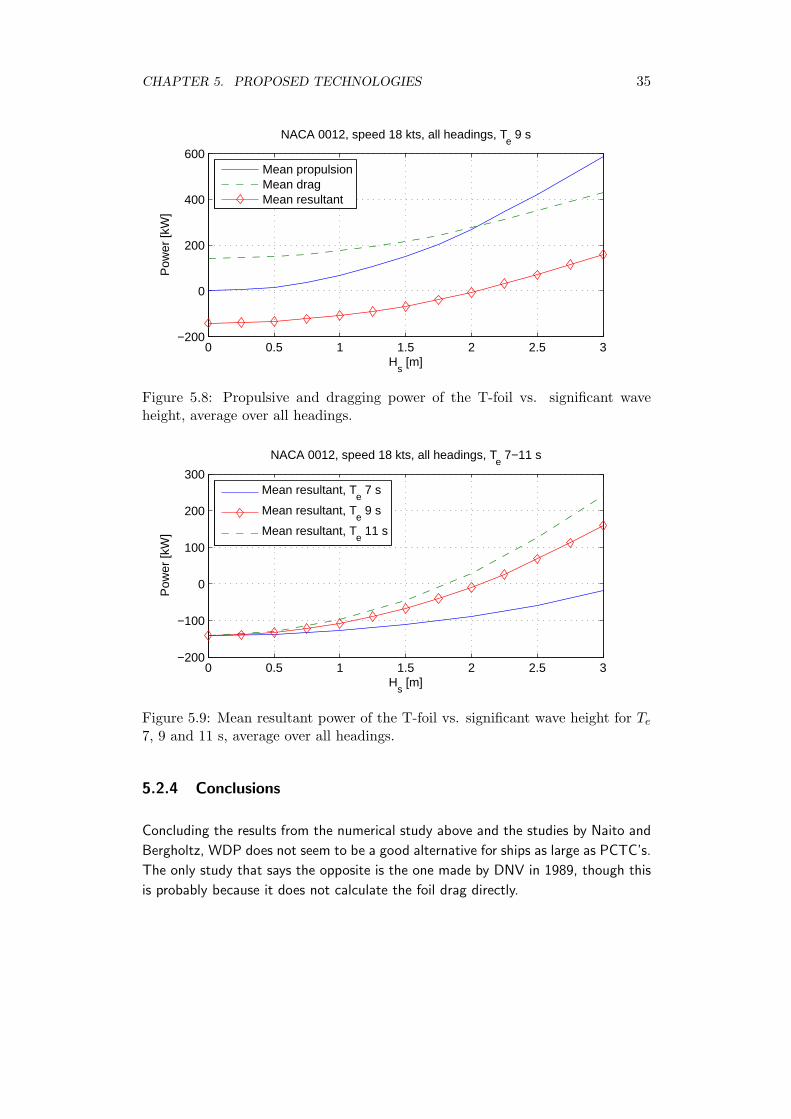
when Te = 9 s, on average for all directions. A comparison of the resultant power
for several Te can be seen in Fig. 5.9, and it shows that the efficiency of the T-
foil increases with the wave period. An estimate using ECMWF statistics [7] and
the results in Fig. 5.9 indicates that the resultant force would be positive 45% of
the time on the worldwide route. Hence, a system of this kind would need to be
retractable in order to avoid added resistance in sea states with smaller waves.
It is worth mentioning again that this model is greatly simplified, since the ship
motion is not coupled to the forces produced by the foil, and since steady state foil
theory is used for a foil in an oscillating flow field. However, this solution is optimistic
under the made assumptions, since the foil is considered to have an optimal control
system. Also, the control system is not considered to consume any power, though
such a system in reality could be quite power-consuming.
CHAPTER 5. PROPOSED TECHNOLOGIES 35
0 0.5 1 1.5 2 2.5 3−200
0
200
400
600
NACA 0012, speed 18 kts, all headings, Te 9 s
Hs [m]
Pow
er [k
W]
Mean propulsionMean dragMean resultant
Figure 5.8: Propulsive and dragging power of the T-foil vs. significant waveheight, average over all headings.
0 0.5 1 1.5 2 2.5 3−200
−100
0
100
200
300
Hs [m]
Pow
er [k
W]
NACA 0012, speed 18 kts, all headings, Te 7−11 s
Mean resultant, T
e 7 s
Mean resultant, Te 9 s
Mean resultant, Te 11 s
Figure 5.9: Mean resultant power of the T-foil vs. significant wave height for Te7, 9 and 11 s, average over all headings.
5.2.4 Conclusions
Concluding the results from the numerical study above and the studies by Naito and
Bergholtz, WDP does not seem to be a good alternative for ships as large as PCTC’s.
The only study that says the opposite is the one made by DNV in 1989, though this
is probably because it does not calculate the foil drag directly.

CHAPTER 5. PROPOSED TECHNOLOGIES 36
5.3 Moving Multi-Point Absorber
Another concept that has been considered during the work with this thesis is a
variation of the Wave Star multi point absorber (Figure 4.6) that can be installed on
a moving ship. The technology has here been named Moving Multi Point Absorber
(MMPA).
The idea is to use several surface-following point absorbers that lie outside of the
ship hull. The relative motion between the absorbers and their attachment points
on the ship would then be used, drawing energy from the sea waves both through
the absorbers’ and the ship’s movement. At the same time the rolling and pitching
movements of the ship would be damped.
The point absorbers used by the Wave Star are half spheres, and would probably
not be suitable for the MMPA because of their large propulsion resistance. Instead,
absorbers with a good ratio between drag and developed power would have to be
used. The absorbers could be displacing, semi-displacing or planing hulls. Hydrofoils
could also be a possibility.
The full scale version of the Wave Star (Fig. 5.10) uses absorbers with a diameter
of five meters, and each absorber is expected to give 25–50 kW output power at 2.5
meters significant wave height, according to Wave Star [24]. Placed on a ship the
output per absorber would probably be even higher, since power is also drawn from
the ship motions. As a quick approximation, consider a configuration where 10 of
these absorbers (� 5 m) are placed on each side of the ship. If each float produces
50 kW, then the total power production could be up to 1 MW at Hs 2.5 m.
Figure 5.10: Wave Star test section in full scale, launched in September 2009.Each float has a diameter of 5 m and is expected to produce 25–50 kW atHs 2.5 m. c©Wave Star Energy

CHAPTER 5. PROPOSED TECHNOLOGIES 37
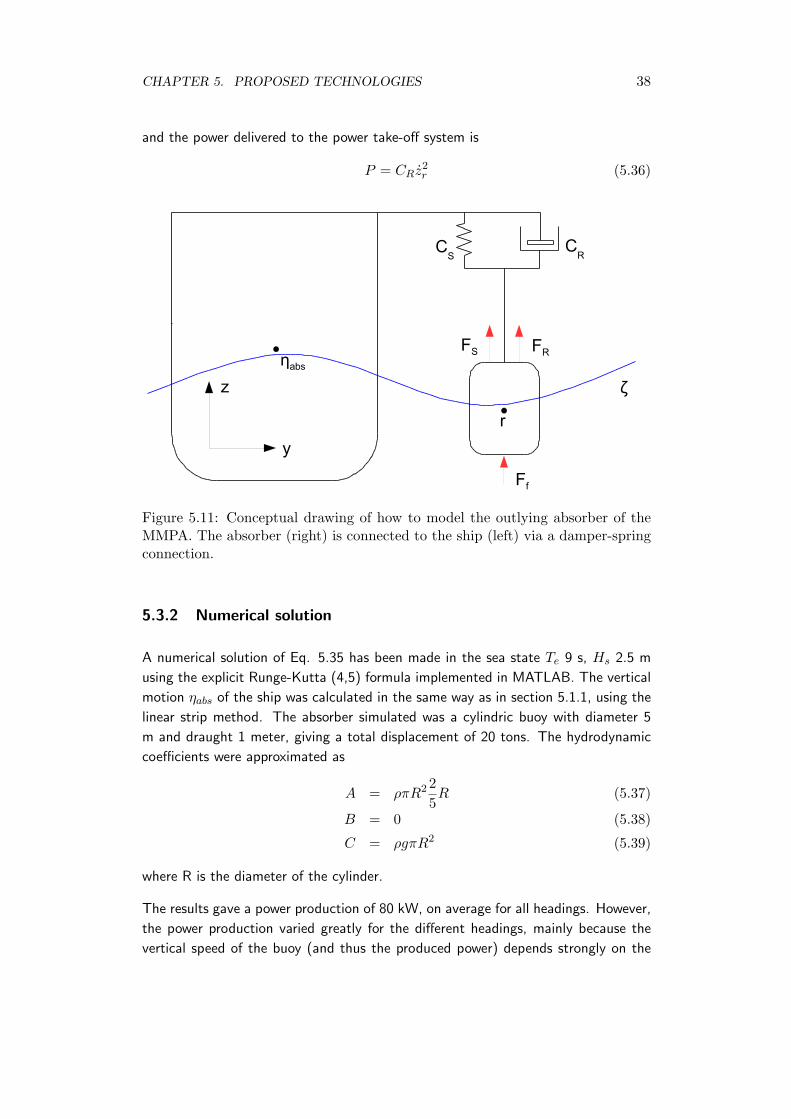
5.3.1 Modelling
The MMPA concept has not been thoroughly studied in this thesis, but a simplified
model of how to do it has been created. The model is based on the following
assumptions:
1. Linear theory is used.
2. The motions of the ship are not influenced by the motions of the absorber,
except for the resistance increase due to the absorber. Therefore the absolute3
vertical motion of the ship ηabs(ζ0, ω, t) at the position of the absorber, obtained
by linear strip theory, is an input variable in the model.
3. Only one absorber is modelled. An advanced model that captures the wave
interaction between many absorbers should also include absorber-ship interac-
tions.
4. The power take-off system is modelled as a spring CS (e.g. a linear generator)
and a damper CR, which are controllable via a control system.
The vertical movement r of the absorber is governed by the equation
mr = FR + Fs + Ff (5.31)
where FR and FS are the damper and spring forces:
FR = −CRzrFS = −CSzr
(5.32)
and zr is the relative motion between the ship and the absorber
zr = r − ηabs (5.33)
The fluid forces on the absorber are represented by Ff ,
Ff = −(Ar +Br + Cr) + Fe (5.34)
where A, B and C are hydrodynamic coefficients of the absorber and Fe is the
exciting wave force, Fe = Fe (ζ0, ω, t). These four variables depend on the absorber
shape, and can be calculated once the geometry has been decided, e.g. using the
linear strip method.
The governing equation finally becomes
(m+A) r + (CR +B) r + (CS + C) r = −CRηabs − CSηabs + Fe (5.35)3Absolute as compared to the relative motion, which is measured between surface and ship.
CHAPTER 5. PROPOSED TECHNOLOGIES 38
and the power delivered to the power take-off system is
P = CRz2r (5.36)
Figure 5.11: Conceptual drawing of how to model the outlying absorber of theMMPA. The absorber (right) is connected to the ship (left) via a damper-springconnection.
5.3.2 Numerical solution
A numerical solution of Eq. 5.35 has been made in the sea state Te 9 s, Hs 2.5 m
using the explicit Runge-Kutta (4,5) formula implemented in MATLAB. The vertical
motion ηabs of the ship was calculated in the same way as in section 5.1.1, using the
linear strip method. The absorber simulated was a cylindric buoy with diameter 5
m and draught 1 meter, giving a total displacement of 20 tons. The hydrodynamic
coefficients were approximated as
A = ρπR2 25R (5.37)
B = 0 (5.38)
C = ρgπR2 (5.39)
where R is the diameter of the cylinder.
The results gave a power production of 80 kW, on average for all headings. However,
the power production varied greatly for the different headings, mainly because the
vertical speed of the buoy (and thus the produced power) depends strongly on the
CHAPTER 5. PROPOSED TECHNOLOGIES 39
encounter frequency of the waves. When the ship heads into the waves the encounter
frequency increases, and thus the power production also increases.
5.3.3 Conclusions
An MMPA system could probably be able to produce a substantial amount of power,
but it is unclear if it could be done without the absorbers giving a resistance increase
larger than the produced power. It would most certainly be difficult at speeds as high
as 18 knots.

CHAPTER 5. PROPOSED TECHNOLOGIES 40
5.4 Turbine-fitted anti-roll tanks
In an M.Sc thesis work at Wallenius by Bjorn Winden [26], the possibility of fitting
roll damping U tanks on a PCTC has been investigated. The tanks work by letting
a fluid (usually water) flow between port and starboard tanks as the ship rolls, thus
counteracting the rolling motion. To improve damping performance in random sea
states, the duct between the tanks is fitted with some type of control valve or flow
damping device. Alternatively, the tank tops are connected by a closed air duct that
contains the control system.
Together with Bjorn Winden the possibility of extracting energy from the ship motions
by fitting a generator turbine to the roll tank system has been investigated. The idea
was to tap energy from the flow between the tanks with a variable resistance, thus
optimising the roll damping and extracting flow energy at the same time. However, a
simulation of the described system on a PCTC in rough weather showed that the tank
motions needed to stabilise the ship were so small that the possible power outtake
would be less than 1 kW. The reason for this is that the tanks already are tuned
to the ship’s roll eigenfrequency, and the adjustments needed to maintain optimal
roll damping in an irregular sea state are very small. One could increase the power
output by deliberately designing the tanks to be out of tune, but the increase would
probably not be large enough to justify this.
Figure 5.12: An anti-roll tank system of the kind considered in Winden’s thesis.The picture is of the INTERING system marketed by Rolls Royce.

Chapter 6
Conclusions
Looking at the technologies evaluated in chapter 5, a first conclusion is that none
has proved to be the future solution for wave energy propulsion of PCTC’s. The
main problem encountered in both the bow overtopping and WDP studies was the
resistance associated with the relatively high speed of 18 knots used, though in the
WDP case the length of the ship also had a negative impact on the results. In
the MMPA study no resistance estimate was made, but at 18 knots the increased
resistance would most likely pose a problem.
Noting that ship speed and size in this study have proved to be the main factors
against feasible wave energy propulsion, a justified question is if it would be possible
to construct shorter and slower ships that were at least partially propelled by wave
energy? The answer is, as it often is in science and engineering, that it depends
on what you need. It would, most likely, be possible to construct a wave-powered
vessel that moved at a very low speed, since a regular wave power device such as
the Wave Star or the Wave Dragon probably could move by its own power. The
question is rather if the speed and cargo-carrying capacity of such a vessel would
make it economically viable? This thesis does however not answer that question,
it only concludes that wave energy propulsion does not seem to be feasible for the
PCTC’s that are in Wallenius’ fleet today.
For future work in this field, a first recommendation would be to study systems for
shorter and slower ships than in this study, maybe 100 m long ships travelling at 10
knots. Secondly, I think that both the WDP and MMPA concepts could be further
studied beyond what has been done in this study. MMPA could be studied with
relative ease by using the linear strip method, while a thorough study of WDP would
have to use quite advanced fluid dynamics to be reliable.
41
Bibliography
[1] I.H. Abbott and A.E. Von Doenhoff. Theory of wing sections : including a
summary of airfoil data. Dover Publications, New York, 2nd ed., 1976. ISBN
0-486-60586-8. [cited at p. 33, 34]
[2] Aquamarine Power. Aquamarine Power Website. Accessed 2009-05-05.
URL http://www.aquamarinepower.com/technologies [cited at p. 18]
[3] J. Bergholtz and P. Stocks. Model testing of a passive foil propeller in
waves. Master’s thesis, Department of Naval Architecture and Ocean Engineer-
ing, Chalmers University of Technology, Goteborg, 1990. Report no. X-90/7.
[cited at p. 33, 34]
[4] J. Brooke. Wave energy conversion. Elsevier Science, Oxford, 2003. ISBN
0-08-044212-9. [cited at p. 12, 16]
[5] J. Cruz (ed.). Ocean wave energy : current status and future prepectives [i.e.
perspectives]. Springer, Berlin, 2008. ISBN 978-3-540-74894-6. [cited at p. 12, 24]
[6] M. Drela. XFoil - Subsonic Airfoil Development System. Accessed 2009-07-15.
URL http://web.mit.edu/drela/Public/web/xfoil/ [cited at p. 34]
[7] ECMWF, European Centre for Medium-Range Weather Forecasts. Interim
Re-Analysis wave statistics for 2007. Downloaded 2009-03-18.
URL http://data-portal.ecmwf.int/data/d/interim_daily/
[cited at p. 9, 33, 34]
[8] J. Falnes. Ocean waves and oscillating systems: linear interactions including
wave-energy extraction. Cambridge University Press, Cambridge, 2002. ISBN
0-521-01749-1. [cited at p. 17]
[9] J. Falnes. A review of wave-energy extraction. Marine Structures, 20(4):185–
201, 2007. [cited at p. 7, 8]
42

BIBLIOGRAPHY 43
[10] J. Grue, A. Mo, and E. Palm. Propulsion of a foil moving in water waves.
Journal of Fluid Mechanics, 186:393–417, 1988. [cited at p. 32]
[11] N. Hogben, N.M.C. Dacunha, G.F. Olliver, and British Maritime Technology
Ltd. Global wave statistics. Unwin Brothers, London, 1986. ISBN 0-946653-
38-9. [cited at p. 33]
[12] H. Isshiki, M. Murakami, and Y. Terao. Utilization of wave energy into propul-
sion of ships – wave devouring propulsion. In 15th Symposium on Naval Hy-
drodynamics, pp. 539–552. National Academy Press, Washington, DC, 1984.
[cited at p. 20]
[13] F. Korbijn. Analysis of a foil propeller system on a vessel of 300m length
sailing between chile and japan. Tech. Rep. 89-0034, Det Norske Veritas, Hovik,
Norway, 1989. [cited at p. 33, 34]
[14] P.K. Kundu and I.M. Cohen. Fluid mechanics. Academic Press, San Diego, 2nd
ed., 2002. ISBN 0-12-178251-4. [cited at p. 2]
[15] L. Margheritini, D. Vicinanza, and P. Frigaard. Ssg wave energy converter: De-
sign, reliability and hydraulic performance of an innovative overtopping device.
Renewable Energy, 34(5):1371–1380, 2009. [cited at p. 15]
[16] M.E. McCormick. Ocean wave energy conversion. Wiley, New York, 1981. ISBN
0-471-08543-X. [cited at p. 12, 16]
[17] W.H. Michel. Sea Spectra Revisited. Marine Technology, 36(4):211–227, 1999.
[cited at p. 7, 8]
[18] S. Naito and H. Isshiki. Effect of bow wings on ship propulsion and motions.
Applied Mechanics Reviews, 58(1-6):253–267, 2005. [cited at p. 33, 34]
[19] Pelamis Wave Power Ltd. Pelamis Wave Power Website. Accessed 2009-05-05.
URL http://www.pelamiswave.com [cited at p. 18]
[20] A. Rosen. Introduktion till fartygs sjoegenskaper. KTH Marina System, Stock-
holm, 2007. [cited at p. 22]
[21] K.V. Rozhdestvensky and V.A. Ryzhov. Aerohydrodynamics of flapping-wing
propulsors. Progress in Aerospace Sciences, 39(8):585–633, 2003. [cited at p. 20]
[22] Seabased AB. Seabased Website. Accessed 2009-05-05.
URL http://www.seabased.com [cited at p. 17]
[23] Wave Dragon ApS. Wave Dragon Website. Accessed 2009-04-21.
URL http://www.wavedragon.net [cited at p. 13]

BIBLIOGRAPHY 44
[24] Wave Star Energy. Wave Star Website. Accessed 2009-05-05.
URL http://www.wavestarenergy.com [cited at p. 17, 36]
[25] Wavegen. Islay Limpet Project Monitoring Final Report, 2002. Downloaded
2009-05-04.
URL http://www.wavegen.co.uk/research_papers.htm [cited at p. 16]
[26] B. Winden. Anti roll tanks in pure car and truck carriers, 2009. M.Sc Thesis at
KTH Center for Naval Architecture, Stockholm. [cited at p. 40]

Nomenclature
α [ - ] Angle of attack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
� [m] Float diameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 36
η0i (ω) [m] Amplitude frequency component of motion in direction i . . page 22
ηi(t, x) [m] Motion in direction i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 22
ηabs [m] Vertical motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
ηrel(t, x) [m] Relative motion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 22
λ [m] Wavelength . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 5
µ [ - ] Heading relative the direction of the waves . . . . . . . . . . . . . . . . page 23
µw [Ns/m2] Dynamic viscosity of sea water . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 3
ω [s−1] Angular frequency . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 5
φ [m2/s] Velocity potential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 3
Π [ - ] Probability. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 25
ρ [kg/m3] Density of fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 2
σi [m] RMS of motion in direction i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 23
τ [N/m2] Viscous stress . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 2
εi(ω) [ - ] Phase shift in direction i . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 23
ϕ [ - ] Flow angle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
ζ [m] Free surface displacement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 4
45
BIBLIOGRAPHY 46
ζ0i (ω) [m] Amplitude of sea state frequency component . . . . . . . . . . . . . . page 22
A [m2s−4] Spectrum constant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
A [Ns2/m] Added mass coefficient of absorber . . . . . . . . . . . . . . . . . . . . . . . . page 37
Af [m2] Foil area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
Ain [m2] Inflow opening area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 25
Aout [m2] Outflow opening area . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 25
B [Ns/m] Damping coefficient of absorber . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
B [s−4] Spectrum constant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
c [m/s] Phase speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 5
C [N/m] Buoyancy coefficient of absorber . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
CB [ - ] Block coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 21
CD [ - ] Foil drag coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
cd [ - ] Section drag coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 34
cg [m/s] Group speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 5
CL [ - ] Foil lift coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
cl [ - ] Section lift coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 34
CR [Ns/m] Damper constant. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 37
CS [N/m] Spring constant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
E [J/m2] Energy density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 6
Ek [J/m2] Kinetic energy density. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 6
Ep [J/m2] Potential energy density . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 6
f [ - ] Probability density function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 25
f [N/kg] External force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 2
FD [N] Drag force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
Fe [N] Exciting wave force on absorber . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
Ff [m] Fluid force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37

BIBLIOGRAPHY 47
FL [N] Lift force. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 33
FR [N] Damper force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
FS [N] Spring force . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
g [m/s2] Acceleration of gravity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 3
H [m] Wave height. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 5
h [m] Pressure height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 24
h0 [m] Water depth . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 4
Hs [m] Significant wave height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
H1/3 [m] Significant wave height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
Hm0 [m] Significant wave height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
hmin [m] Minimum head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 24
J [W/m] Energy flux . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 6
k [m−1] Wavenumber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 5
kX [ - ] Phase shift due to heading and position . . . . . . . . . . . . . . . . . . . page 23
L [m] Ship length . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 33
Lpp [m] Length between perpendiculars . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 21
mj [m4s−j ] Spectral moment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
p [N/m2] Total pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 2
P [W] Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 25
PE [W] Required engine power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 21
ps [N/m2] Hydrostatic pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 24
R [m3] Reservoir level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 24
r [m] Vertical motion of absorber . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 37
S [m4s] Energy spectrum function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
Sηi [m4s] Response energy spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 23
T [s] Waveperiod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 5
BIBLIOGRAPHY 48
t [s] Time. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 2
Te [s] Wave energy period . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 7
U [m/s] Ship speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 25
u [m/s] Flow velocity. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 2
v [m/s] Flow speed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .page 24
w [m3/2] Power height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 25
Yi(ω) [ - ] Transfer function in direction i . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 22
z [m] Vertical position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 3
zin [m] Inflow height . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . page 24
Abbreviations
Abbreviation Description Definition
ECMWF European Centre for Medium-Range WeatherForecasts
page 9
kts knots, 1 knot = 1.852 km/h page 21MMPA Moving Multi Point Absorber page 36MST Multi-Stage Turbine page 15OWC Oscillating Water Column page 16PCTC Pure Car and Truck Carrier page 1pdf Probability Density Function page 25SSG Sea Slot-cone Generator page 15WDP Wave Devouring Propulsion page 20WEC Wave Energy Conversion page 12WPA Water Plane Area page 33
49

List of Figures
3.1 Worldwide shipping route . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Combined scatter and energy diagram for worldwide route . . . . . . . . . . 10
4.1 Principles of energy capture in an overtopping device . . . . . . . . . . . . . 134.2 Wave Dragon prototype . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144.3 Sea Slot-cone Generator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 154.4 Limpet oscillating water column . . . . . . . . . . . . . . . . . . . . . . . . . 164.5 Linear generator buoy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174.6 Wave Star multi point absorber . . . . . . . . . . . . . . . . . . . . . . . . . 194.7 Pelamis WEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.8 Oyster WEC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194.9 Wallenius’ E/S Orcelle, equipped with fins for wave energy propulsion . . . . 20
5.1 Example transfer functions for a PCTC . . . . . . . . . . . . . . . . . . . . . 225.2 Example of energy spectrum . . . . . . . . . . . . . . . . . . . . . . . . . . . 235.3 Illustration of the bow overtopping model. . . . . . . . . . . . . . . . . . . . 245.4 Output power as a function of inflow height for a given sea state. . . . . . . . 275.5 Output and retarding power estimates for model variations . . . . . . . . . . 295.6 Same comparison as Fig. 5.5, but at half the speed. . . . . . . . . . . . . . . 305.7 Modelling of WDP-equipped ship . . . . . . . . . . . . . . . . . . . . . . . . 325.8 Propulsive and dragging power of the T-foil, all headings . . . . . . . . . . . 355.9 Mean resultant of the T-foil for multiple Te, all headings . . . . . . . . . . . 355.10 Wave Star test section in full scale . . . . . . . . . . . . . . . . . . . . . . . . 365.11 Conceptual drawing of how to model the outlying absorber of the MMPA. . 385.12 An anti-roll tank system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
50

List of Tables
3.1 Average monthly energy flux . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
5.1 Ship data for M/V Fedora used in study. . . . . . . . . . . . . . . . . . . . . 21
51







