
TheRobotAcademy.com
Andalucía Open Future1 Marzo 2017
Metodología de DesarrolloRobots Móviles

2
Soon we’ll live in aWorld of Smart Robots

1Abriendo el apetito
El Cubo de Rubik

4

2Una visión panorámica

6
Competencias técnicas
Ingeniería de Sistemas
Programación
Impresión 3D
Modelado en 3D
Diseño mecánico
Diseño eléctrico
Montaje y cableado
Hexágono de competencias

7
Diseño
• Especificaciones
• Diseño conceptual
• Maqueta digital (diseño 3D)
Fabricación
• Preparaciónsólidos (STL)
• Slicing de piezas
• Impresión 3D
• Post-procesado
Integración y pruebas
• Integración mecánica
• Hardware y cableado
• Pruebas funcionales
Fases de desarrollo

8
Filling the gap between Education degrees
and Industry demand of professionals

4Ejemplo: Robot JUS

10
Diseño del grafo
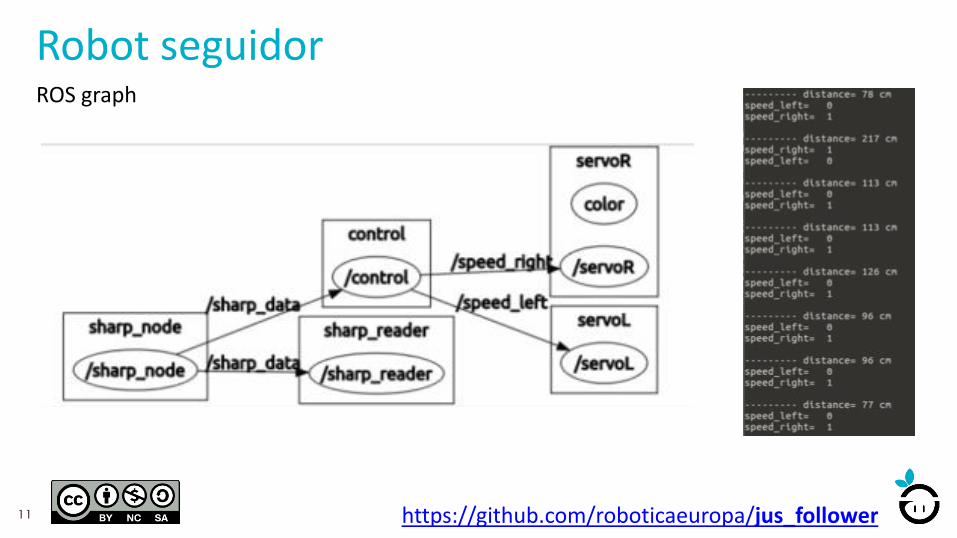
Robot seguidor
micro Maestro
Sensor proximidad
left
right
channel 5channel 4
channel 0
Maestro class
controlsensor
L_servoR_servo
sharp_publisher.pystart_stop.py
servo_L.py servoR.py
/sharp_data
/speed_left
/speed_right
https://github.com/roboticaeuropa/jus_follower
11
ROS graph
Robot seguidor
https://github.com/roboticaeuropa/jus_follower

12
Modo STEER BY HAND
Robot seguidor
roslaunch jus_follower start_stop.launch
https://github.com/roboticaeuropa/jus_follower
switch_distance= 23.1 cm

13
Modo FOLLOW ME
Robot seguidor
https://github.com/roboticaeuropa/jus_follower
roslaunch jus_follower follow_me.launch
switch_distance= 30 cm








