Paul Mann

Overview
Background Outline of principles of methods Limitations Thoughts on design Potential outputs Variations Any suggestions?
BackgroundLast years symposium...
I liked Kevin Dixon’s laser scanner, a toy I could get used to playing with.
But most impressed by the potential of Anna Mason’s videogrammetry work.

VideogrammetryThe low contrast problem...
The method relies on tracking automatically identifiable features through a sequence of frames.Cave walls are often low contrast dull browns, lacking identifiable features.Shadows are the most readily identified feature, but these change position as the light source moves
Suggested solution...Add targets
But this takes time and is invasive.
So why not use projected spots of light?
Thinking time...

Trying out videogrammetryFreeware and demo versions of videogrammetry
software on internet.
Attempt to project light patterns
Also enhance edge detection
Plenty of difficulties, not many results

Sidelined“to build your own laser scanner for under a fiver...”
1. A computer2. A web cam3. A few sheets of paper4. A laser5. A glass fuse6. David...

Success at last!

How it works... Orthogonal background planes Marked with a calibration grid
Locates camera Scales and orientates planes Provides corrections for lens
distortions Structured light
Planar laser Calculate plane of light
From incidence on orthogonal planes Any other point lit must be on this
plane And on linear ray path calculated for
that pixel Hence point co-ordinates given by
intersection of these two.Image from David-Laserscanner .com home page

Drawbacks
The David system is constrained by its need for two reference planes.
It is possible to scan though a hole to capture detail a behind the planes, but range is very limited as laser line must still intersect both planes.
Like most structured light solutions it is “inward” looking.

Useful in caves?
Excellent for capturing details on a cave wallRock artScallops
But can we capture the whole cave?Back to the drawing board
More internet research...
Excel 2009 survey trade show in York Surveying is fun...
...it has lots of nice toys...
...but better to do it properly So off to Glasgow...
... project required
One solution
A structured light triangulation profiler
One solution
A structured light triangulation profiler

One solution
A structured light triangulation scanner
Design
The components:A planar laserA digital cameraA suitably wide lens
○ A parabolic reflector lens is a bit pricey, but ideal.
Fortunately I have a couple spare.
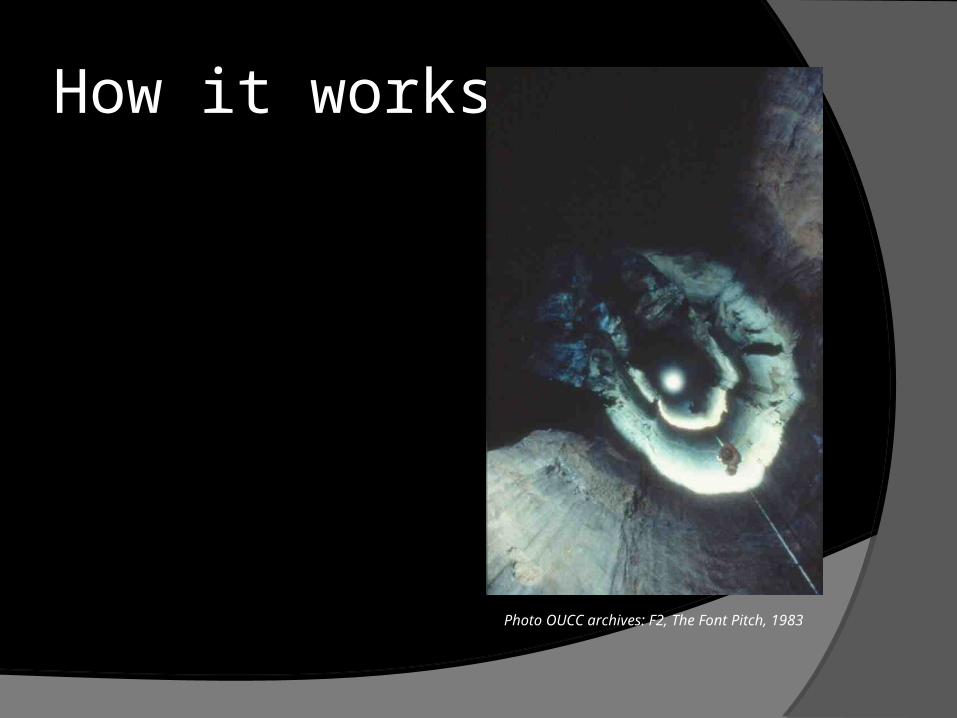
How it works
Photo OUCC archives: F2, The Font Pitch, 1983
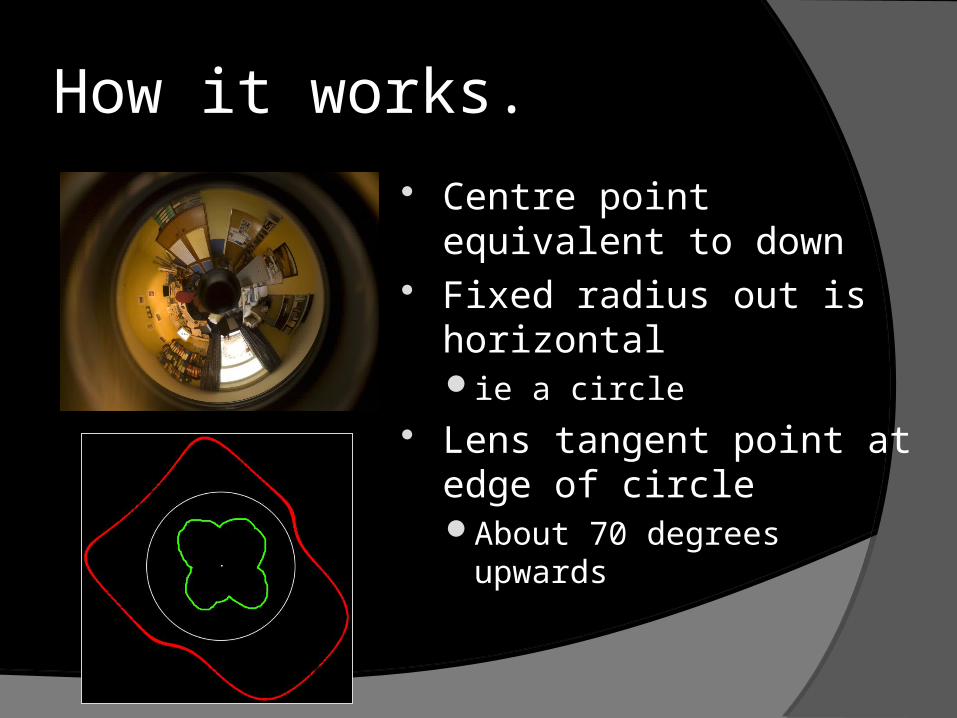
How it works. Centre point equivalent to
down Fixed radius out is horizontal
ie a circle
Lens tangent point at edge of circleAbout 70 degrees upwards
How it works..
Vertical angle (clino) is a function of distance from central point
Horizontal angle (compass) is directly equivalent to angle from central point
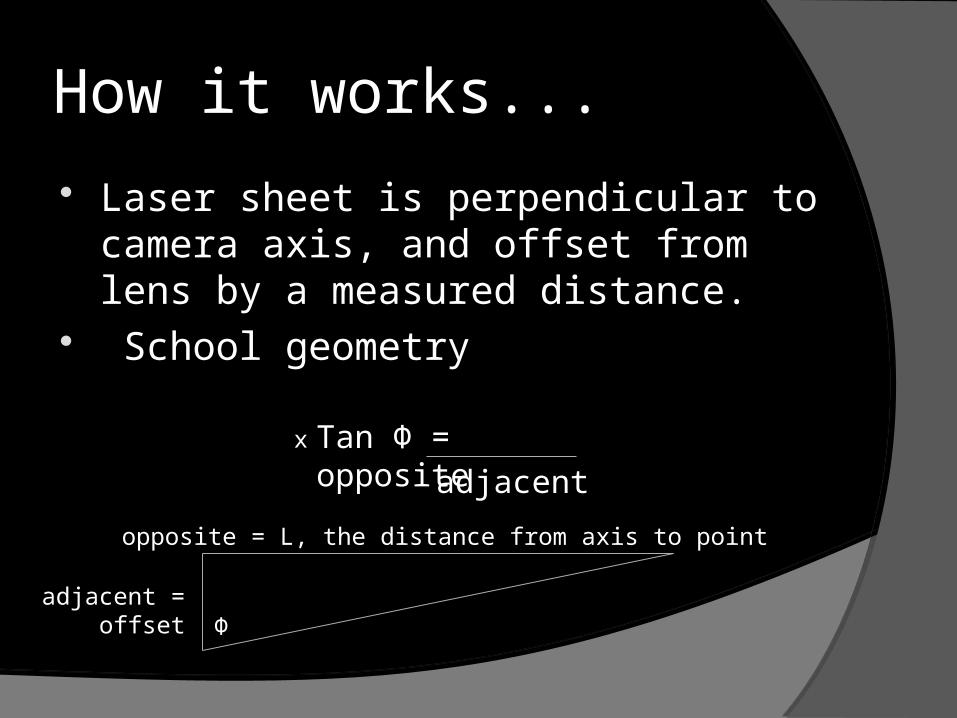
How it works...
Laser sheet is perpendicular to camera axis, and offset from lens by a measured distance.
School geometry
Tan Φ = opposite
adjacent
Φadjacent =
offset
x
opposite = L, the distance from axis to point
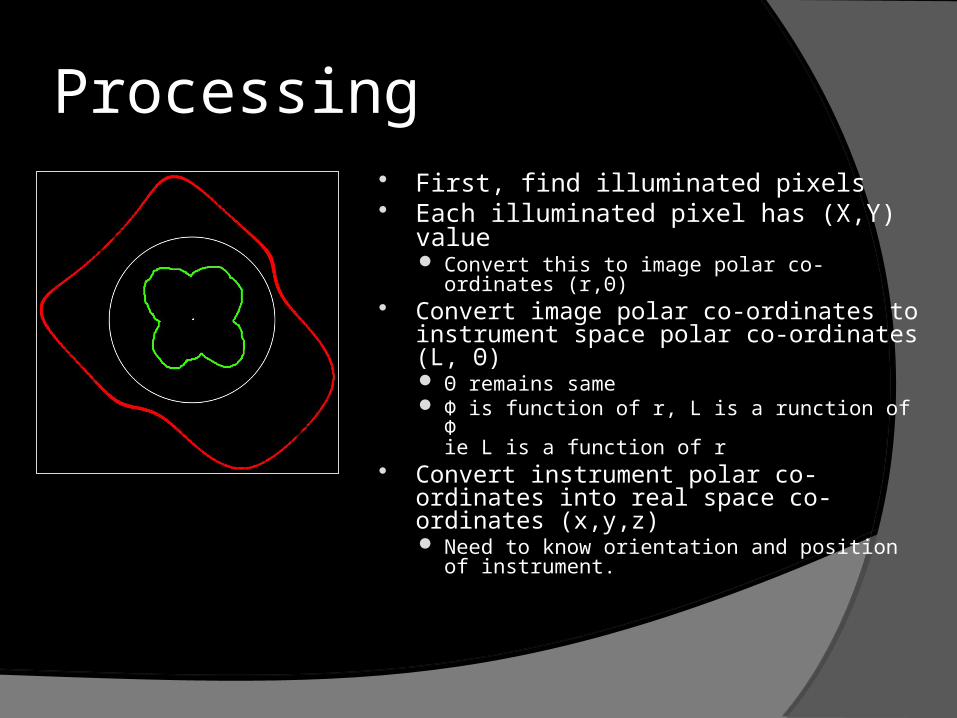
Processing First, find illuminated pixels Each illuminated pixel has (X,Y) value
Convert this to image polar co-ordinates (r,ϴ) Convert image polar co-ordinates to
instrument space polar co-ordinates (L, ϴ) ϴ remains same Φ is function of r, L is a runction of Φ
ie L is a function of r Convert instrument polar co-ordinates into
real space co-ordinates (x,y,z) Need to know orientation and position of
instrument.

Complications to processing Barrelling / pincushioning of camera lens
Easily modelled Modelling of parabolic lens curvature
Again relatively easily modelled Offset between axis of two lenses
A bit more challenging
Either rigorous calibration to determine lens constants
Or skip and calibrate straight to a (X,Y) look up table
Limitations
PrecisionLimited by pixel spacingFor 6MPixel camera:
1000 pixels cover 160 degrees vertically
1 pixel equates to about 1/6 degree
For laser offset of 1m, and passage radius 1m this equates to 3mm precision
But because of the tan Φ this drops off rapidly as passage radius increases.
Limitations
Is the drop off in precision a problem in cave survey situations?I suspect notIn big passages, increase offset of laser
Need for low lightHard to make system work in daylightSuits cave survey
Output Remember, not just one point being
recorded –Typically a passage profile of 3000 pointsCaptured at reshoot rate of cameraCan easily distinguish red and green lasersCan easily determine above and below reflector
planeHence could create upwards of 10,000 points
per shotComparable to commercially available scanners
Challenges
Getting from a profiler to a scannerMovement need not be rotational, well suited for
linear capture
But how do we control such motion and record it accurately?
Stringing taut wires a lot of work
Shafts a lot easier to constrain
Possibly active railway tunnels (or even recording vegetation overhanging lines)

Handling data Pointclouds
A set of points defined by their x,y,z coordinates
May have other attributes linked (eg RGB)
Huge data sets Specialist software Getting away from paper
Variations
Other structured light solutions exist How about combining this approach with
photogrammetry / videogrammetry? Increasing computer power is making
complex solutions viable Robotics is driving a lot of research in
this area – worth keeping an eye on these developments

Over to you...
Thoughts about how this could be used, developed, etc very welcome.







