Download - Nurul Huda Insani ITS PKMP
USULAN PROGRAM KREATIVITAS MAHASISWA
JUDUL PROGRAM
PERAMALAN GERAK BERPASANGAN ROLLING, SWAYING, DAN YAWING
MENGGUNAKAN MODEL HIBRIDA VAR-ANN SEBAGAI DETEKSI AWAL
INSTABILITAS PADA FLOATING PRODUCTION UNIT
BIDANG KEGIATAN :
PKM PENELITIAN
Diusulkan oleh :
Nurul Huda Insani (1312030056) Angkatan 2012
I Dewa Ayu Made Istri W (1310100009) Angkatan 2010
Novri Suhermi (1310100010) Angkatan 2010
Kiki Ferawati (1311100018) Angkatan 2011
Eva Arum Setyarini (1311100046) Angkatan 2011
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2014

i
USULAN PROGRAM KREATIVITAS MAHASISWA
JUDUL PROGRAM
PERAMALAN GERAK BERPASANGAN ROLLING, SWAYING, DAN YAWING
MENGGUNAKAN MODEL HIBRIDA VAR-ANN SEBAGAI DETEKSI AWAL
INSTABILITAS PADA FLOATING PRODUCTION UNIT
BIDANG KEGIATAN :
PKM PENELITIAN
Diusulkan oleh :
Nurul Huda Insani (1312030056) Angkatan 2012
I Dewa Ayu Made Istri W (1310100009) Angkatan 2010
Novri Suhermi (1310100010) Angkatan 2010
Kiki Ferawati (1311100018) Angkatan 2011
Eva Arum Setyarini (1311100046) Angkatan 2011
INSTITUT TEKNOLOGI SEPULUH NOPEMBER
SURABAYA
2014

ii
PENGESAHAN USULAN PKM-PENELITIAN
1. Judul Kegiatan : Peramalan Gerak Rolling, Swaying, dan
Yawing Menggunakan Model Hibrida VAR-
ANN Sebagai Deteksi Awal Instabilitas pada
Floating Production Unit
2. Bidang Kegiatan : PKMP
3. Ketua Pelaksana Kegiatan
a. Nama Lengkap : Nurul Huda Insani
b. NIM : 1312 030 056
c. Jurusan : Statistika
d. Universitas/Institut/Politeknik : Institut Teknologi Sepuluh Nopember
Surabaya
e. Alamat Rumah/Telp/HP : Jalan Sawo no. 125 RT 03/RW 05 Selosari,
Magetan/08983500116
f. Alamat email : [email protected]
4. Anggota Pelaksana Kegiatan : 4 orang
5. Dosen Pendamping
a. Nama Lengkap dan Gelar : Muhammad Sjahir Akbar, S.Si, M.Si
b. NIDN : 0005077208
c. Alamat Rumah dan HP : Srengganan Lebar 16 Surabaya/ 0817595710
6. Biaya Kegiatan Total
DIKTI : Rp 9.720.000,00
Sumber lain : -
7. Jangka Waktu Pelaksanaan : 5 bulan
Menyetujui,
Surabaya, 28 Oktober 2013
Ketua Jurusan Statistika FMIPA ITS
(Dr. Muhammad Mashuri,M.T.)
NIP. 196204081987011001
Ketua Pelaksana Kegiatan
(Nurul Huda Insani)
NRP. 1312 030 056
Pembantu Rektor Bidang
Kemahasiswaan dan Akademik
(Prof. Dr. Ing. Herman Sasongko)
NIP. 196010041986011001
Dosen Pendamping
(Muhammad Sjahid Akbar, S.Si, M.Si)
NIP. 197207051998021001
iii
DAFTAR ISI
HALAMAN SAMPUL ........................................................................................... i
HALAMAN PENGESAHAN ............................................................................... ii
DAFTAR ISI ......................................................................................................... iii
DAFTAR TABEL ................................................................................................. iv
DAFTAR GAMBAR ............................................................................................ iv
RINGKASAN ......................................................................................................... v
BAB 1. PENDAHULUAN ..................................................................................... 1
1.1 Latar Belakang .......................................................................................... 1
1.2 Rumusan Masalah ..................................................................................... 2
1.3 Tujuan ....................................................................................................... 2
1.4 Luaran yang Diharapkan ........................................................................... 2
1.5 Manfaat Program ...................................................................................... 3
BAB 2. TINJAUAN PUSTAKA ........................................................................... 3
2.1 Model Vector Autoregressive (VAR) ....................................................... 3
2.2 Artificial Neural Network (ANN) ............................................................. 3
2.3 Model Hibrida VAR-ANN ....................................................................... 4
2.4 Gerak Kapal (Ship Motion) ....................................................................... 5
2.5 Penelitian Sebelumnya .............................................................................. 6
BAB 3. METODE PENELITIAN ........................................................................ 7
3.1 Sumber Data ............................................................................................. 7
3.2 Variabel Penelitian .................................................................................... 7
3.3 Langkah Analisis ...................................................................................... 7
BAB 4. BIAYA DAN JADWAL KEGIATAN .................................................... 8
4.1 Anggaran Biaya ........................................................................................ 8
4.2 Jadwal Kegiatan ........................................................................................ 9
DAFTAR PUSTAKA ............................................................................................ 9
LAMPIRAN-LAMPIRAN .................................................................................... 1

iv
DAFTAR TABEL
Tabel 3.1 Struktur Data Penelitian .......................................................................... 7
Tabel 4.1 Rancangan Biaya Penelitian ................................................................... 8
Tabel 4.2 Jadwal Kegiatan ....................................................................................... 9
DAFTAR GAMBAR
Gambar 2.1 Gerak Translasi Kapal ........................................................................ 5
Gambar 2.2 Gerak Rotasi Kapal ............................................................................ 6
Gambar 3.1 Diagram Alir Analisis ........................................................................ 8

v
RINGKASAN
Foating Production Unit (FPU) mempunyai peran penting dalam proses produksi
minyak dan gas mentah yang berada di daerah lepas pantai. Oleh karena itu, stabilitas
FPU sangat perlu diperhatikan. Kapal atau FPU yang memiliki stabilitas rendah memiliki
risiko besar untuk terjadi kecelakaan. Salah satu studi yang dilakukan untuk mengetahui
stabilitas suatu kapal (dalam hal ini FPU) adalah studi gerak kapal (ship motion study).
Gerak rolling merupakan gerak yang sangat penting untuk dipelajari dalam mengetahui
keamanan suatu kapal. Oleh karena itu, stabilitas suatu kapal sangat ditentukan dari
perilaku gerak rolling. Gerak kapal dapat dipelajari baik secara individu (uncoupled)
maupun secara berpasangan (coupled). Salah satu sistem gerak coupling yang sering
diteliti adalah gerak rolling-swaying-yawing. Gerak kapal pada beberapa tahap ke depan
dapat diramalkan dengan menggunakan analisis time series. Model linier time series yang
sering digunakan adalah Vector Autoregressive (VAR). Pendekatan secara komputasional
untuk menangkap pola data yang nonlinier sering digunakan model Artificial Neural
Network (ANN). Model linier VAR dan model ANN kemudian dikembangkan menjadi
model hibrida VAR-ANN dengan mengambil keunggulan masing-masing model dalam
menangkap pola linier dan nonlinier. Pada penelitian ini, dilakukan peramalan gerak
rolling, swaying, dan yawing pada FPU dalam kondisi beam seas dengan menggunakan
model VAR-ANN. Setelah didapatkan model yang sesuai, kemudian dilakukan permalan
gerak rolling, swaying, dan yawing untuk beberapa tahap ke depan. Data yang digunakan
adalah data eksperimen gerak kapal di Laboratorium Hidrodinamika Indonesia BPPT
yang direkam selama 30 menit.

1
BAB 1. PENDAHULUAN
1.1 Latar Belakang
Industri minyak dan gas (migas) telah berkembang dengan pesat karena kebutuhan
energi yang terus meningkat. Indonesia merupakan salah satu negara penghasil minyak
dan gas bumi. Tentunya Indonesia memiliki banyak blok pengeboran minyak dan gas
bumi, termasuk yang berlokasi di daerah lepas pantai. Blok pengeboran minyak dan gas
bumi di lepas pantai didukung dengan adanya suatu kapal yang berfungsi sebagai
production unit untuk memproses minyak atau gas mentah. Kapal ini sering disebut
sebagai Floating Production Unit (FPU). Keberadaan FPU menjadi sangat penting dalam
proses produksi minyak dan gas bumi. Suatu FPU yang memiliki tingkat stabilitas rendah
memiliki risiko tinggi untuk terjadi kecelakaan. Oleh karena itu, stabilitas FPU sangat
perlu diperhatikan. Salah satu studi yang dilakukan untuk mengetahui stabilitas suatu
kapal adalah studi gerak kapal (ship motion study).
Gerak kapal merupakan salah satu contoh dari six degrees of freedom (6DoF). Gerak
kapal terdiri dari 6 macam gerak, yaitu gerak rolling, yawing, pitching, swaying, surging,
dan heaving. Salah satu gerak kapal yang paling sering diteliti adalah gerak rolling. Gerak
rolling adalah gerak rotasi yang berputar pada sumbu longitudinal kapal. Gerak rolling
merupakan gerak yang sangat penting untuk dipelajari dalam mengetahui keamanan suatu
kapal (Hui & Fong, 2010). Oleh karena itu, stabilitas suatu kapal sangat ditentukan dari
perilaku gerak rolling. Gerak kapal dapat dipelajari baik secara individu (uncoupled)
maupun secara berpasangan (coupled). Salah satu sistem gerak coupling yang sering
diteliti adalah gerak rolling-swaying-yawing.
Gerak kapal pada beberapa tahap ke depan dapat diprediksi dengan menggunakan
analisis time series. Analisis time series adalah analisis observasional data yang terjadi
dengan urutan waktu dengan interval waktu yang tetap. Analisis time series terdiri dari
metode untuk menganalisis data time series untuk mengetahui pola dan karakteristik data.
Salah satu model time series yang sering digunakan adalah model Vector Autroregressive
(VAR). Model VAR bersifat linier, sehingga model ini tidak dapat dengan mudah
menangkap pola data yang bersifat nonlinier (Pai & Ling, 2005). Oleh karena itu,
diperlukan suatu pendekatan dengan menggunakan model lain yang bisa menangkap pola
nonliner dengan baik. Salah satu model nonlinier yang sering digunakan dalam analisis
time series adalah Artificial Neural Network (ANN). ANN atau disebut Neural Network

2
(NN) merupakan salah satu model nonlinier yang mempunyai bentuk fungsional fleksibel
dan mengandung beberapa parameter yang tidak dapat diinterpretasikan seperti pada
model parametrik (Suhartono, 2007). Zhang (2003) memperkenalkan model gabungan
(hybrid) antara model linier dan model nonlinier serta menunjukkan bahwa model
tersebut lebih unggul dalam menghasilkan ramalan yang akurat. Dengan demikian,
kemampuan model VAR dalam menangkap pola linier dan kemampuan model ANN
dalam menangkap pola nonlinier dapat digabungkan menjadi model hibrida VAR-ANN
sehingga dapat meningkat tingkat akurasi peramalan.
Selanjutnya, pada penelitian kali ini dilakukan peramalan gerak berpasangan
(coupled motion) rolling, swaying, dan yawing pada FPU menggunakan model hibrida
VAR-ANN. Penelitian ini dilakukan dalam kondisi beam seas dengan menggunakan
gelombang tipe irregular. Beam seas adalah kondisi laut di mana gelombang bergerak
dari arah 90○ terhadap muka kapal, sehingga gelombang menghantam badan kapal dengan
gaya yang maksimal.
1.2 Rumusan Masalah
Rumusan masalah dalam PKM Penelitian ini adalah:
1. Bagaimana bentuk model VAR-ANN yang sesuai untuk menggambarkan dan
menjelaskan perilaku dan pola data gerak rolling, swaying, dan yawing pada
FPU?
2. Bagaimana hasil peramalan gerak rolling, swaying, dan yawing beberapa tahap ke
depan pada FPU menggunakan model VAR-ANN yang sesuai?
1.3 Tujuan
Tujuan dalam PKM Penelitian ini adalah:
1. Mengetahui bentuk model VAR-ANN yang sesuai untuk menggambarkan dan
menjelaskan perilaku dan pola data gerak rolling, swaying, dan yawing pada
FPU.
2. Mengetahui hasil peramalan gerak rolling, swaying, dan yawing beberapa tahap
ke depan pada FPU menggunakan model VAR-ANN yang sesuai.
1.4 Luaran yang Diharapkan
Luaran yang diharapkan dari penelitian ini adalah artikel dan jurnal yang
dipublikasikan dalam seminar dan jurnal ilmiah internasional yang bertemakan applied
statistics, time series forecasting dan ocean engineering. Artikel atau jurnal ini nanti

3
dapat menjadi bahan referensi bagi para pemilik kapal atau FPU untuk mengetahui tingkat
stabilitas kapal atau FPU ketika berada di laut.
1.5 Manfaat Program
Manfaat yang diharapkan dalam PKM Penelitian ini adalah:
1. Penelitian ini dapat dijadikan referensi bagi pemilik FPU sebagai deteksi awal
instabilitas pada FPU, sehingga dapat meminimalisir risiko terjadinya kecelakaan.
2. Menambah dan memperkaya wawasan penerapan metode statistik khususnya
metode peramalan time series dalam aplikasi di bidang perkapalan.
BAB 2. TINJAUAN PUSTAKA
2.1 Model Vector Autoregressive (VAR)
Model vector autoregressive (VAR) adalah salah satu model yang baik, fleksibel,
dan mudah digunakan dalam analisis multivariate time series jika dibandingkan dengan
metode lain. Model ini adalah pengembangan dari model univariat autoregressive (AR).
Seperti pada kasus univariat, proses AR lebih dapat dipahami dan diinterpretasi daripada
proses MA (Chatfield, 2000). Begitu juga halnya dengan proses VAR, sehingga model
VAR menjadi model multivariate time series yang sering digunakan. Wei (2006)
menjelaskan bentuk umum dari model proses VAR (p) dapat ditulis sebagai berikut.
�̇�𝒕 = Ф𝟏�̇�𝒕−𝟏 + ⋯+ Ф𝒑�̇�𝒕−𝒑 + 𝒂𝒕 (2.1)
Keterangan:
Ф𝑝 = matriks m x m dari parameter ke-p
Ф𝑃𝑠 = matriks m x m dari parameter ke-P untuk efek seasonal
𝑎𝑡 = vektor m x 1 dari residual pada waktu ke-t
�̇�𝑡 = vektor m x 1 dari variabel pada waktu ke-t
Sebagai contoh, untuk m = 3, model VAR(p) dapat dituliskan sebagai berikut.
[
�̇�1,𝑡
�̇�2,𝑡
�̇�3,𝑡
] = [
𝜙111 𝜙112 𝜙113
𝜙121 𝜙122 𝜙123
𝜙131 𝜙132 𝜙133
] [
�̇�1,𝑡−1
�̇�2,𝑡−1
�̇�3,𝑡−1
] + ⋯+ [
𝜙𝑝11 𝜙𝑝12 𝜙𝑝13
𝜙𝑝21 𝜙𝑝22 𝜙𝑝23
𝜙𝑝31 𝜙𝑝32 𝜙𝑝33
] [
�̇�1,𝑡−𝑝
�̇�2,𝑡−𝑝
�̇�3,𝑡−𝑝
] + [
𝑎1,𝑡
𝑎2,𝑡
𝑎3,𝑡
]
Prosedur pembentukan model VAR mulai dari identifikasi pola data sampai pengujian
kesesuaian model lebih lengkapnya dapat dilihat dalam Tsay (2010).
2.2 Artificial Neural Network (ANN)
Artificial Neural Network (ANN) atau jaringan saraf tiruan adalah sebuah
information-processing system yang memiliki karakteristik performa tertentu dalam
jaringan saraf biologis (Fausett, 1994). Artificial Neural Network (ANN) telah

4
dikembangkan sebagai generalisasi model matematis dari kesadaran manusia atau biologi
saraf, berdasarkan asumsi-asumsi sebagai berikut.
1. Pemrosesan informasi terjadi pada banyak simple element yang disebut neuron.
2. Sinyal dilewatkan di antara neuron di atas connection links.
3. Masing-masing connection link memiliki bobot yang dikalikan dengan sinyal
yang ditransmisi.
4. Masing-masing neuron menggunakan fungsi aktivasi (biasanya nonlinier) pada
net input (jumlahan sinyal input terboboti) untuk menentukan sinyal output.
Sebuah neural network digolongkan berdasarkan pola connection di antara neuron
(disebut juga arstitektur), metode dalam mentukan bobot dari connection (disebut
training, learning, atau algoritma), dan fungsi aktivasi.
2.3 Model Hibrida VAR-ANN
Model hibrida Vector Autoregressive-Artificial neural Network (VAR-ANN) adalah
model ANN berdasarkan input dari order model VAR. Banyak neuron dalam output layer
dari architecture ini adalah sama dengan banyaknya series yang digunakan dalam model
VAR. Misalkan bobot dari neuron ke-i dalam input layer pada neuron ke-j dalam hidden
layer dinotasikan sebagai 𝑤𝑖𝑗. Maka, jika skalar h menyatakan jumlah unit dalam hidden
layer, m menyatakan jumlah variabel (dalam kasus ini, m = 3), maka matriks bobot untuk
hidden layer memiliki dimensi (𝑝 𝑥 𝑚) 𝑥 ℎ.
𝑾 =
[ 𝑤1,𝑡−1,1
⋮𝑤1,𝑡−𝑝,1
𝑤2,𝑡−1,1
⋮𝑤2,𝑡−𝑝,1
𝑤3,𝑡−1,1
⋮𝑤3,𝑡−𝑝,1
𝑤1,𝑡−1,2
⋮𝑤1,𝑡−1,2
𝑤2,𝑡−1,2
⋮𝑤2,𝑡−1,2𝑤3,𝑡−1,2
⋮𝑤3,𝑡−1,2
… 𝑤1,𝑡−1,ℎ
… ⋮… 𝑤1,𝑡−𝑝,ℎ
⋯ 𝑤2,𝑡−1,ℎ
⋯ ⋮⋯ 𝑤2,𝑡−𝑝,ℎ
⋯ 𝑤3,𝑡−1,ℎ
⋯ ⋮⋯ 𝑤3,𝑡−𝑝,ℎ]
(2.2)
Ketika bobot dari neuron ke-j dalam hidden layer pada neuron ke-k pada output layer
dinotasikan dengan 𝜆𝑗𝑘, maka matriks bobot 𝑚𝑥ℎ untuk output layer adalah sebagai
berikut.
𝝀 = [
𝜆1,1 𝜆1,2 … 𝜆1,ℎ
𝜆2,1 𝜆2,2 … 𝜆2,ℎ
𝜆3,1 𝜆3,2 … 𝜆3,ℎ
] (2.3)
5
Misalkan 𝜶 = (𝛼1, 𝛼2, 𝛼3)′ dan 𝜷 = (𝛽1, 𝛽2, 𝛽3)′ adalah vektor residual dari hidden
layer dan output layer, maka output dari model hybrid VAR-ANN dapat didefinisikan
sebagai berikut.
𝒀𝒕 = 𝝀𝑭(𝒀𝑾 + 𝜶) + 𝜷 + 𝜺𝒕 (2.4)
dan
𝑭(𝒀𝑾 + 𝜶) =𝟏
𝟏+𝐞𝐱𝐩 (−(𝒀𝑾+𝜶)) (2.5)
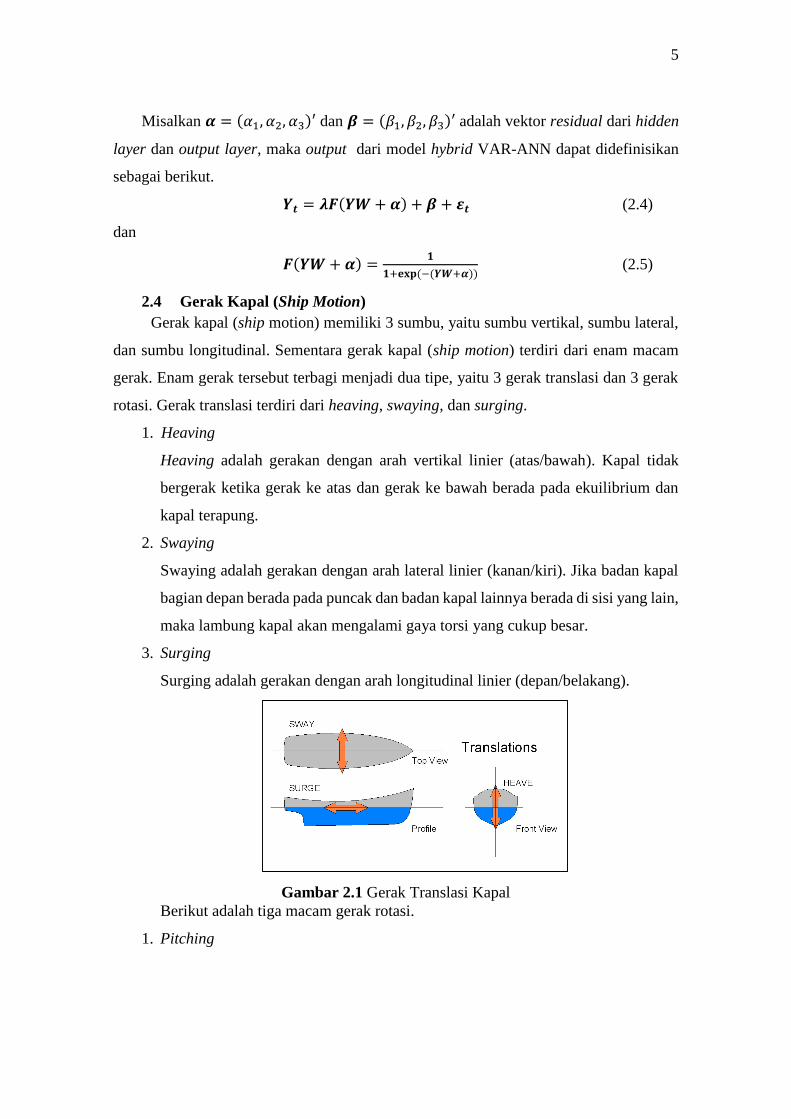
2.4 Gerak Kapal (Ship Motion)
Gerak kapal (ship motion) memiliki 3 sumbu, yaitu sumbu vertikal, sumbu lateral,
dan sumbu longitudinal. Sementara gerak kapal (ship motion) terdiri dari enam macam
gerak. Enam gerak tersebut terbagi menjadi dua tipe, yaitu 3 gerak translasi dan 3 gerak
rotasi. Gerak translasi terdiri dari heaving, swaying, dan surging.
1. Heaving
Heaving adalah gerakan dengan arah vertikal linier (atas/bawah). Kapal tidak
bergerak ketika gerak ke atas dan gerak ke bawah berada pada ekuilibrium dan
kapal terapung.
2. Swaying
Swaying adalah gerakan dengan arah lateral linier (kanan/kiri). Jika badan kapal
bagian depan berada pada puncak dan badan kapal lainnya berada di sisi yang lain,
maka lambung kapal akan mengalami gaya torsi yang cukup besar.
3. Surging
Surging adalah gerakan dengan arah longitudinal linier (depan/belakang).
Gambar 2.1 Gerak Translasi Kapal
Berikut adalah tiga macam gerak rotasi.
1. Pitching

6
Pitching adalah gerakan rotasi kapal terhadap sumbu lateral (depan/belakang).
Dalam pitching, kapal diangkat di haluan dan diturunkan di buritan atau
sebaliknya. Sudut pitching bervariasi tergantung panjang kapal.
2. Rolling
Rolling adalah gerakan rotasi kapal terhadap sumbu longitudinal (kanan/kiri).
Ketika kapal berada di laut moderat, kapal besar memiliki sudut rolling hingga
mencapai 10°. Dalam kejadian langka, sudut rolling juga bisa mencapai 45° atau
lebih.
3. Yawing
Yawing adalah gerakan rotasi kapal terhadap sumbu vertikal. Hal ini terjadi karena
ketidakmungkinan kemudi kapal pada jalur benar-benar lurus.
Gambar 2.2 Gerak Rotasi Kapal
2.5 Penelitian Sebelumnya
Penelitian sebelumnya yang berhubungan dengan peramalan gerak kapal pernah
dilakukan oleh Khan, Bil, Marion, dan Malcom (2004) tentang prediksi gerak rolling,
pitching, dan kecepatan angin menggunakan model time series ARIMA, VARIMA, dan
ANN. Hal yang sama juga telah dilakukan oleh Nicolau, Palade, dan Aiordachioaie
(2007) di dalam penelitiannya tentang prediksi gerak rolling pada kapal konvensional
dengan menggunakan feed-forward neural networks (FFNN). Penelitian-penelitian
sebelumnya masih belum ada yang melakukan peramalan gerak rolling, swaying, dan
yawing secara bersamaan menggunakan metode stokastik time series. Namun, peramalan
gerak rolling, swaying, dan yawing pernah dilakukan oleh Das, Das, dan Sahoo (2010)
menggunakan metode numerik. Kontribusi penelitian ini adalah melakukan peramalan
gerak rolling, swaying, dan yawing melalui pendekatan stokastik time series
menggunakan model VAR-ANN.

7
BAB 3. METODE PENELITIAN
Metode yang digunakan dalam penelitian ini adalah metode pemodelan dan
peramalan. Pemodelan dilakukan untuk mengetahui pola dan perilaku gerak rolling,
swaying, dan yawing. Setelah didapatkan formulasi model yang sesuai, selanjutnya
dilakukan peramalan gerak rolling, swaying, dan yawing untuk beberapa tahap ke depan.
3.1 Sumber Data
Data yang digunakan dalam penelitian ini adalah data rekaman gerak rolling,
swaying, dan yawing dari hasil simulasi eksperimen sebuah FPU di Laboratorium
Hidrdinamika Indonesia. Gerakan FPU ini direkam selama 30 menit, di mana tiap 1 detik
dihasilkan 100 data. Data ini merupakan data sekunder yang diperoleh dari Badan
Pengkajian dan Penelitian Teknologi (BPPT).
3.2 Variabel Penelitian
Terdapat 3 (tiga) variabel yang digunakan dalam penelitian ini. Variabel-variabel
tersebut adalah sebagai berikut.
1. 𝑌1,𝑡 = gerak rolling (derajat).
2. 𝑌2,𝑡 = gerak swaying (m).
3. 𝑌3,𝑡 = gerak yawing (derajat).
Struktur data dalam penelitian ini ditampilkan dalam tabel berikut.
Tabel 3.1 Struktur Data Penelitian
Waktu (second) Variabel
Rolling (derajat) Swaying (meter) Yawing (derajat)
1 𝑌1,1 𝑌2,1 𝑌3,1
2 𝑌1,2 𝑌2,2 𝑌3,2
⋮ ⋮ ⋮ ⋮
180000 𝑌1,180000 𝑌2,180000 𝑌3,180000
3.3 Langkah Analisis
Langkah analisis dalam penelitian ini adalah sebagai berikut.

8
Studi Literatur
Pengumpulan Data
Membangun Model VAR
1. Identifikasi Model
2. Penentuan Order Model VAR
3. Estimasi Parameter Model
4. Pemeriksaan Diagnostik
Membangun Model VAR-ANN
1. Uji Linieritas Model
2. Membangun Arsitektur Model ANN
3. Menentukan Input berdasarkan Order Model VAR
4. Menentukan Bobot Optimum dan Jumlah Neuron pada Hidden Layer
5. Menentukan Formulasi Model VAR-ANN
Melakukan Peramalan Beberapa Tahap ke Depan Menggunakan Model
VAR-ANN
Melakukan Interpretasi Model VAR-ANN
Mengambil Kesimpulan dari Hasil Peramalan
Gambar 3.1 Diagram Alir Analisis
BAB 4. BIAYA DAN JADWAL KEGIATAN
4.1 Anggaran Biaya
Berikut ini merupakan daftar rincian rancangan biaya yang dialokasikan
untuk kegiatan penelitian.
Tabel 4.1 Rancangan Biaya Penelitian
No Jenis Pengeluaran Biaya (Rp)
1. Biaya Peralatan, Jasa dan Pendukung Rp 3.550.000,00
2. Biaya Habis Pakai Rp 2.620.000,00
3. Biaya Perjalanan Rp 3.000.000,00
4. Biaya Pembuatan Laporan dan Administrasi Rp 550.000,00
Total Pengeluaran Rp 9.720.000,00

9
4.2 Jadwal Kegiatan
Berikut ini adalah jadwal kegiatan program penelitian dengan alokasi waktu
selama 5 bulan.
Tabel 4.2 Jadwal Kegiatan
No. Kegiatan Bulan 1 Bulan 2 Bulan 3 Bulan 4 Bulan 5
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1 Pengkajian Masalah
2 Studi Literatur
3 Pengumpulan Data
4 Identifikasi Variabel
5 Penentuan Metode
Penelitian
6 Analisis Data
7 Penarikan
Kesimpulan
8 Pembuatan Laporan
Penelitian
9 Persiapan Seminar
dan publikasi Ilmiah
10 Pembimbingan Dosen
DAFTAR PUSTAKA
Chatfield, C. (2000). Time-Series Forecasting. New York: Chapman & Hall.
Cryer, J.D., & Chan, K. (2008). Time Series Analysis With Application in R (2nd Ed.).
New York: Springer.
Das, S.K., Das S.N, & Sahoo, P.K. (8-10 November 2006). Investigation of Sway, Roll
and Yaw Motions of a Ship with Forward Speed: Numerical Modeling for Flared
Up Conditions. Paper presented at 5th International Conference on High
Perfomance Marine Vehicles, Launceston.
Fausett, L. (1994). Fundamental of Neural Network: Architectures, algorithm and
applicalions, New Jersey: Prentice Hall Inc.
10
Hui, L.A., & Fong, Y.F. (2010). A Numerical Study of Ship’s Rolling Motion,
Proceedings of the 6th IMT-GT Conference on Mathematics, Statistics, and its
Applications, (pp. 843-851). Kuala Lumpur, Malaysia: Universiti Tunku Abdul
Rahman.
Khan, A., Bil, C., Marion, K., & Malcolm, M. (29 Agustus-3 September 2004). Real Time
Prediction of Ship Motions and Attitudes using Advanced Prediction Techniques.
Paper presented at 24th International Congress of The Aeronautical Sciences,
Yokohama.
Nicolau, V., Palade, V., & Aiordachioaie, D. (2007). Neural Network Prediction of The
Roll Motion of a Ship for Intelligent Course Control. Lecture Notes in Computer
Science, 4694, 284-291.
Pai, P.F.,& Ling, C.S.(2005). A Hybrid ARIMA and Support Vector Machings Models
in Stock Price Forecasting. Omega The International Journal of Management
Science, 33, 497-505.
Suhartono (2007). Feed Forward Neural Network untuk Pemodelan Runtun Waktu.
Disertasi, Jurusan Matematika, Universitas Gadjah Mada.
Tsay, R.S. (2010). Analysis of Financial Time Series: Financial Ecnometrics (3rd Ed.).
New York: John & Wiley Sons, Inc.
Wei, W.W., (2006). Time Series Analysis : Univariate and Multivariate Methods (2nd
ed.), Addison Wesley.
Zhang, G.P. (2003). Time Series Forecasting Using a Hybrid ARIMA and Neural
Network Model. Neurocomputing, 50, 159-17.
LAMPIRAN-LAMPIRAN
i. Biodata Ketua dan Anggota
1. Biodata Ketua
A. Identitas Diri
1 Nama Lengkap (dengan gelar) Nurul Huda Insani
2 Jenis Kelamin Perempuan
3 Program Studi D3 Statistika FMIPA ITS
4 NRP 1312100056
5 Tempat dan Tanggal Lahir Jakarta, 19 Oktober 1993
6 E-mail [email protected]
7 Nomor Telepon/HP 08983500116
B. Riwayat Pendidikan
SD SMP SMA
Nama Institusi SDN Selosari 4
Magetan
SMPN 1
Magetan
SMAN 1
Magetan
Jurusan - - IPA
Tahun Masuk-Lulus 1999-2005 2005-2008 2008-2011
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan
dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata
dijumpai ketidaksesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu
persyaratan dalam pengajuan Hibah PKM Penelitian.
Surabaya, 28 Oktober 2013
Pengusul,
(Nurul Huda Insani)

2. Biodata Anggota 1
A. Identitas Diri
1 Nama Lengkap (dengan gelar) I Dewa Ayu Made Istri Wulandari
2 Jenis Kelamin Perempuan
3 Program Studi S1 Statistika FMIPA ITS
4 NRP 1310100009
5 Tempat dan Tanggal Lahir Denpasar, 7 Januari 1993
6 E-mail [email protected]
7 Nomor Telepon/HP 081916411610
B. Riwayat Pendidikan
SD SMP SMA
Nama Institusi SDN 3 Legian SMPN 2
Denpasar
SMAN 4
Denpasar
Jurusan - - IPA
Tahun Masuk-Lulus 1998-2004 2004-2007 2007-2010
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan
dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata
dijumpai ketidaksesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu
persyaratan dalam pengajuan Hibah PKM Penelitian.
Surabaya, 28 Oktober 2013
Pengusul,
(I Dewa Ayu Made Istri Wulandari)

3. Biodata Anggota 2
A. Identitas Diri
1 Nama Lengkap (dengan gelar) Novri Suhermi
2 Jenis Kelamin Laki-laki
3 Program Studi S1 Statistika FMIPA ITS
4 NRP 1310100010
5 Tempat dan Tanggal Lahir Pekanbaru, 2 November 1992
6 E-mail [email protected]
7 Nomor Telepon/HP 085731193070
B. Riwayat Pendidikan
SD SMP SMA
Nama Institusi SDN 003 Sail
Pekanbaru
SMPN 13
Pekanbaru
SMAN Plus
Provinsi Riau
Jurusan - - IPA
Tahun Masuk-Lulus 1998-2004 2004-2007 2007-2010
C. Penghargaan dalam 10 tahun terakhir (dari pemerintah, asosiasi, atau instansi
lain)
No Jenis Penghargaan Institusi Pemberi
Penghargaan Tahun
1 Juara 2 Calculus Cup Tingkat
Nasional BEMJ Matematika UNJ 2012
2 Juara 1 OSN Pertamina 2012
Bidang Matematika Tingkat
Provinsi Jawa Timur
PT Pertamina (Persero) 2012
3 Finalis 6 Besar OSN Pertamina
2012 Bidang Matematika
Tingkat Nasional
PT Pertamina (Persero) 2012
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan
dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata
dijumpai ketidaksesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu
persyaratan dalam pengajuan Hibah PKM Penelitian.
Surabaya, 28 Oktober 2013
Pengusul,
(Novri Suhermi)
4. Biodata Anggota 3
A. Identitas Diri
1 Nama Lengkap (dengan gelar) Kiki Ferawati
2 Jenis Kelamin Perempuan
3 Program Studi S1 Statistika FMIPA ITS
4 NRP 1312100018
5 Tempat dan Tanggal Lahir Gresik, 21 juni 1993
6 E-mail [email protected]
7 Nomor Telepon/HP 085648528028
B. Riwayat Pendidikan
SD SMP SMA
Nama Institusi SDN
Mojotengah I
SMPN 1
Kedamean
SMAN 1 Krian
Jurusan - - IPA
Tahun Masuk-Lulus 1999-2005 2005-2008 2008-2011
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan
dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata
dijumpai ketidaksesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu
persyaratan dalam pengajuan Hibah PKM Penelitian.
Surabaya, 28 Oktober 2013
Pengusul,
(Kiki Ferawati)
5. Biodata Anggota 4
A. Identitas Diri
1 Nama Lengkap (dengan gelar) Eva Arum Setyarini
2 Jenis Kelamin Perempuan
3 Program Studi S1 Statistika FMIPA ITS
4 NRP 1313100046
5 Tempat dan Tanggal Lahir Ponorogo, 28 Mei 1992
6 E-mail [email protected]
7 Nomor Telepon/HP 08973278790
B. Riwayat Pendidikan
SD SMP SMA
Nama Institusi SD Negeri 1
Winong
SMPN 1 Jetis SMAN 1
Ponorogo
Jurusan - - IPA
Tahun Masuk-Lulus 1999-2005 2005-2008 2008-2011
Semua data yang saya isikan dan tercantum dalam biodata ini adalah benar dan
dapat dipertanggungjawabkan secara hukum. Apabila di kemudian hari ternyata
dijumpai ketidaksesuaian dengan kenyataan, saya sanggup menerima sanksi.
Demikian biodata ini saya buat dengan sebenarnya untuk memenuhi salah satu
persyaratan dalam pengajuan Hibah PKM Penelitian.
Surabaya, 28 Oktober 2013
Pengusul,
(Eva Arum Setyarini)

ii. Justifikasi Anggaran Kegiatan
1. Biaya Peralatan, Jasa, dan Pendukung
No Material Justifikasi
Pemakaian
Kuantitas Harga Satuan Total Harga
1
Pendaftaran
Seminar
Internasional
Untuk
mendaftarkan
penelitian ke
seminar
internasional
1 seminar Rp 1,000,000.00 Rp 1.000.000,00
2 Lisensi Software
Analisis
Digunakan
untuk
menganalisis
data
1 buah Rp 2,000,000.00 Rp 2.000.000,00
3 Pembelian Modem
Internet
Digunakan
untuk
browsing
Internet
1 unit Rp 200,000.00 Rp 200.000,00
4 Keperluan
Dokumentasi
Untuk
dokumentasi
kegiatan
1 kali Rp 350,000.00 Rp 350.000,00
SUBTOTAL (Rp) Rp 3.550.000,00
2. Biaya Habis Pakai
No Material Justifikasi
Pemakaian
Kuantitas Harga Satuan Total Harga
1 Jurnal Referensi
Untuk
menambah
referensi
dalam
penelitian
5 buah Rp 50,000.00 Rp 250.000,00
2 Kertas A4 80 gram
Untuk
mencetak
laporan
8 rim Rp 40,000.00 Rp 320.000,00
3 Notebook
Untuk
mencatat
selama
pekerjaan
5 buah Rp 20,000.00 Rp 100.000,00
4 Tinta Printer
Untuk
mencetak
laporan
8 buah Rp 150,000.00 Rp 1.200.000,00
5 Alat Tulis
Untuk
keperluan
pekerjaan di
lapangan
5 pak Rp 50,000.00 Rp 250.000,00
6 Pembelian Pulsa
Internet
Untuk
keperluan
internet
5 voucher Rp 100,000.00 Rp 500.000,00
SUBTOTAL (Rp) Rp 2,620.000.00

3. Biaya Perjalanan
No Material Justifikasi
Pemakaian
Kuantitas Harga Satuan Total Harga
1
Observasi ke
Laboratorium
Hidrodinamika
Indonesia
Untuk biaya
perjalanan ke
Laboratorium
Hidrodinamika
Indonesia
5 orang Rp 200,000.00 Rp 1.000.000,00
2
Perjalanan
Seminar
Internasional
Digunakan
untuk biaya
perjalan
seminar
1 orang Rp 2,000,000.00 Rp 2.000.000,00
SUBTOTAL (Rp) Rp 3.000.000,00
4. Biaya Pembuatan Laporan dan Administrasi
No Material Justifikasi
Pemakaian
Kuantitas Harga Satuan Total Harga
1 Laporan Akhir
PKM + Jilid
Untuk
pencetakan
laporan akhir
PKM
5
eksemplar Rp 100,000.00 Rp 500.000,00
2
CD Laporan
Kemajuan dan
Laporan Akhir
Untuk
menyimpan
laporan
kemajuan dan
laporan akhir
1 unit Rp 10,000.00 Rp 50.000,00
SUBTOTAL (Rp) Rp 550.000,00
TOTAL (Keseluruhan) Rp 9.720.000,00
iii. Susunan Organisasi Tim Peneliti dan Pembagian Tugas
No. Nama / NRP Program
Studi
Bidang
Ilmu
Alokasi
Waktu
(jam/minggu)
Uraian Tugas
1.
Nurul Huda
Insani /
1312030056
D3 Statistika 6 jam/minggu
Bertugas untuk
mengoordinasikan
kinerja tim,
mengontrol dan
mengevaluasi
pelaksanaan
program, serta
membantu
pemodelan statistik
2.
I Dewa Ayu
Made Istri W /
1310100009
S1 Statistika 6 jam/minggu
Bertugas mengatur
dana keluar pada
realisasi program,
melakukan
pencatatan dana
masuk dan keluar
3. Novri Suhermi
/ 1310100010 S1 Statistika 6 jam/minggu
Bertugas dalam
pemodelan
statistik,
interpretasi hasil
model, melakukan
peramalan, dan
mengambil
kesimpulan
4. Kiki Ferawati /
1311100018 S1 Statistika 6 jam/minggu
Bertugas atas
hubungan dengan
pihak-pihak
eksternal yang
terkait dengan
aktivitas PKM-
Penelitian dan
membantu
pemodelan statistik
5.
Eva Arum
Setyarini /
1311100046
S1 Statistika 6 jam/minggu
Bertanggung jawab
pada kebutuhan
terkait dengan
surat-menyurat,
perijinan,
dokumentasi
kegiatan dan
pengisian logbook

iv. Surat Pernyataan Ketua Peneliti
SURAT PERNYATAAN KETUA PENELITI
Yang bertanda tangan di bawah ini:
Nama : Nurul Huda Insani
NRP : 1312030056
Program Studi : D3 Statistika
Fakultas : Matematika dan Ilmu Pengetahuan Alam
dengan ini menyatakan bahwa usulan PKM Penelitian saya dengan judul:
“Peramalan Gerak Rolling, Swaying, dan Yawing Menggunakan Model Hibrida
VAR-ANN Sebagai Deteksi Awal Instabilitas pada Floating Production Unit”
yang diusulkan untuk tahun anggaran 2014 bersifat original dan belum pernah dibiayai
oleh lembaga atau sumber dana lain.
Bilamana dikemudian hari ditemukan ketidaksesuaian dengan pernyataan ini, maka saya
bersedia dituntut dan diproses sesuai dengan ketentuan yang berlaku dan mengembalikan
seluruh biaya penelitian yang sudah diterima ke kas negara.
Demikian pernyataan ini dibuat dengan sesuangguhnya dan dengan sebenar-benarnya.
Mengetahui,
Pembantu Rektor
Bidang Kemahasiswaan dan Akademik
(Prof. Dr. Ing. Herman Sasongko)
NIP. 19601004 198601 1 001
Surabaya, 28 Oktober 2013
Yang menyatakan,
(Nurul Huda Insani)
NRP. 1312030056







