ISA, UVA 1
Modelos de procesos y linealización
Prof. María Jesús de la FuenteDpt. Ingeniería de Sistemas y Automática
Univ. De Valladolid
ISA, UVA 2
Modelos
• Representación aproximada de la realidad• Abstracción: Incluimos solo aquellos aspectos
y relaciones que son de interés.• Modelos físicos, cualitativos, cuantitativos,…• Usos de los modelos: diseño, entrenamiento,
que pasa si…., decisiones,...• ¿Como generarlos, resolverlos, utilizarlos,
validarlos?

ISA, UVA 3
¿Qué es un modelo matemático?
• Conjunto de ecuaciones que relacionan las variables de interés del proceso y representan adecuadamente su comportamiento
• Siempre son aproximaciones de la realidad• Distintos modelos para distintos objetivos y
tipos de procesos• Compromiso entre facilidad de uso y
exactitud

ISA, UVA 4
RepresentaciRepresentacióón adecuadan adecuada
Proceso
u
tiempo
y
tiempo
Modelo
ym
tiempo
ISA, UVA 5
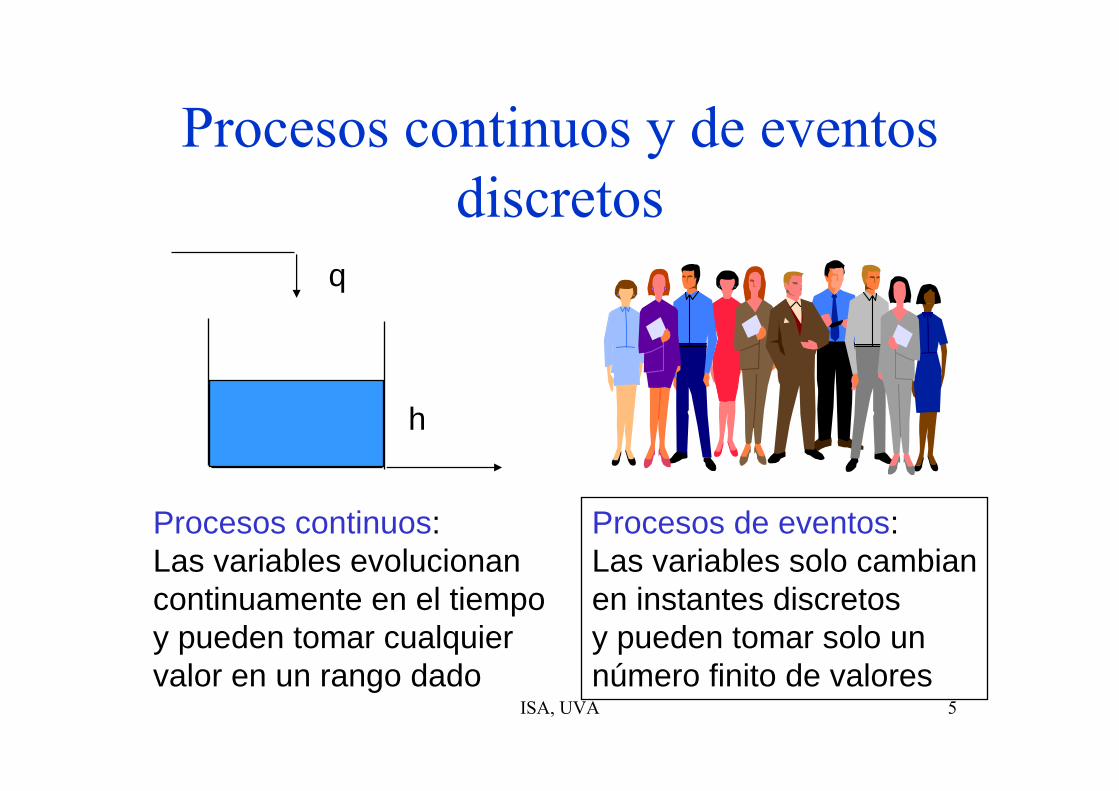
Procesos continuos y de eventos discretos
q
h
Procesos continuos:Las variables evolucionancontinuamente en el tiempoy pueden tomar cualquier valor en un rango dado
Procesos de eventos:Las variables solo cambianen instantes discretosy pueden tomar solo un número finito de valores

ISA, UVA 6
Procesos Continuos / Eventos• Procesos Continuos
– Descritos principalmente por DAEs o PDE.– Interés fundamental: la trayectoria de algunas
variables• Procesos de eventos discretos
– Descritos principalmente por secuencias de actividades.
– Interés fundamental: el comportamiento estadístico de algunas variables.

ISA, UVA 7
Modelos estáticos y dinámicos
q
h
A d hd t
q k hρ ρ= −
q k h= ρ
Modelo estático: Relaciona las variables en unestado de equilibrio
Modelo dinámico:Relaciona las variables alo largo del tiempo
ISA, UVA 8
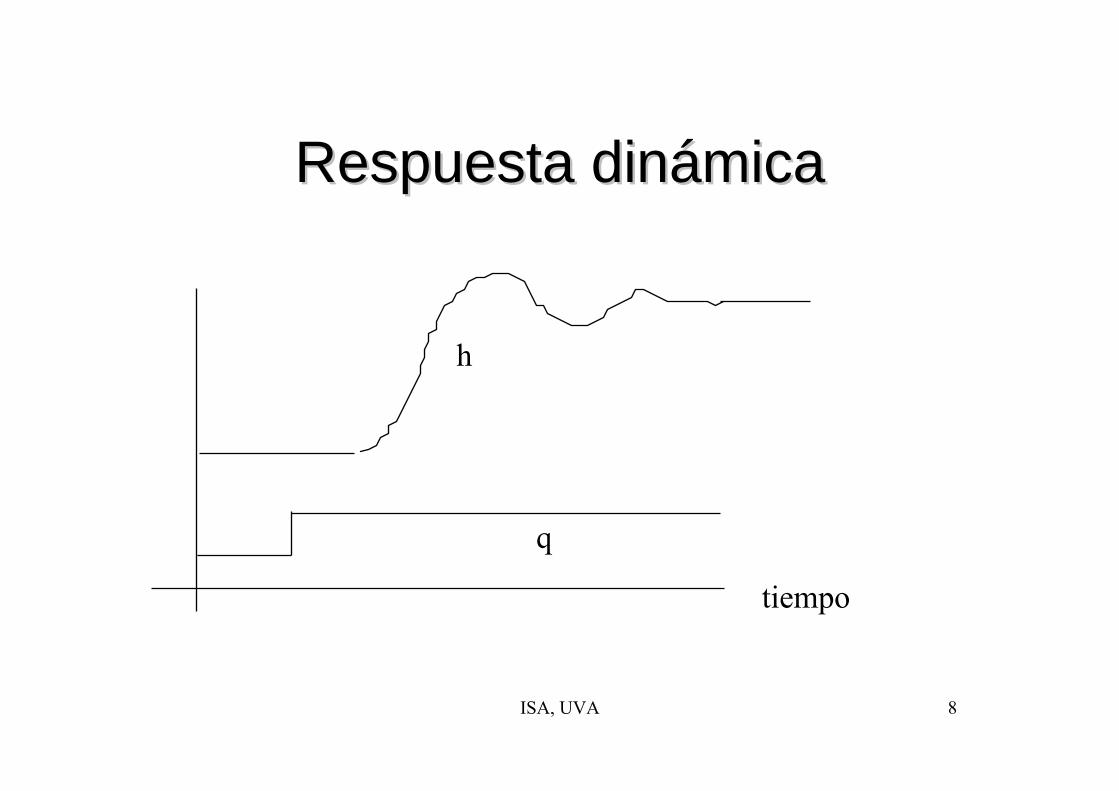
Respuesta dinRespuesta dináámicamica
tiempo
q
h

ISA, UVA 9
Modelos estáticos y dinámicos• Modelos estáticos
– Representan situaciones de equilibrio– Descritos mediante ecuaciones algebraicas– Orientados a diseño
• Modelos dinámicos en tiempo continuo– Representan la evolución temporal– Descritos mediante DAE y PDE– Uso mas general: control, entrenamiento,...
ISA, UVA 10
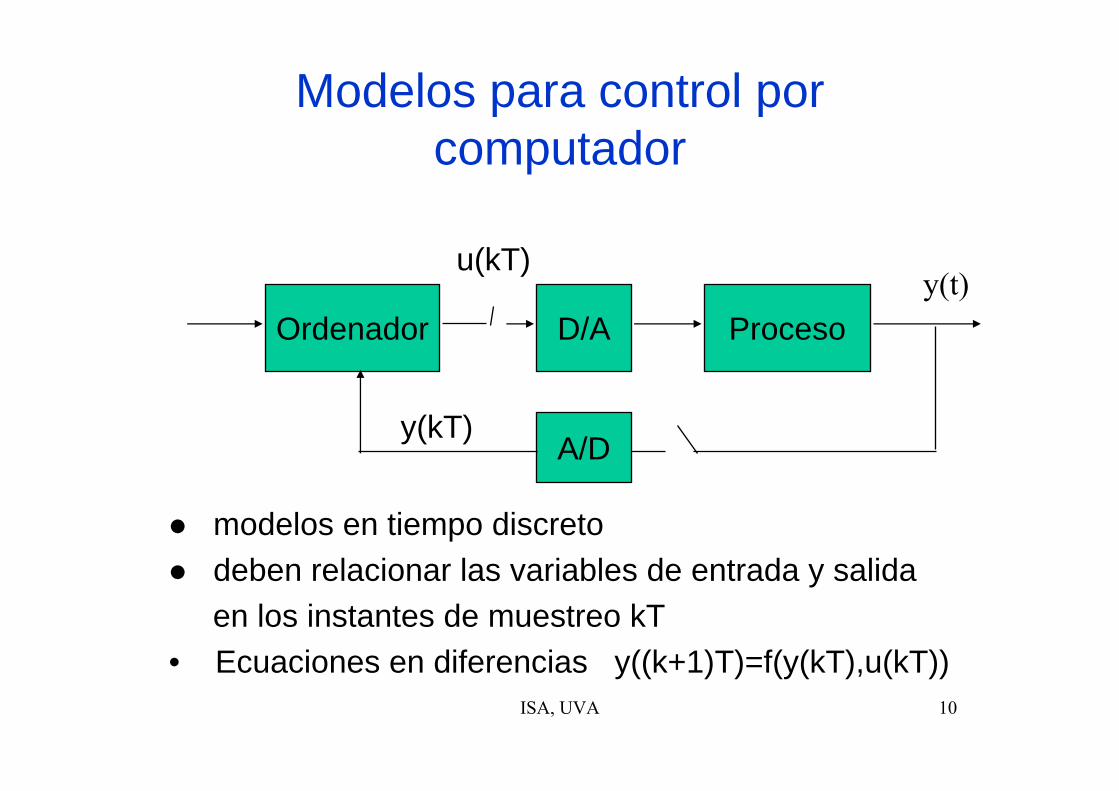
Modelos para control por computador
ProcesoOrdenador D/A
A/Dy(kT)
u(kT)
modelos en tiempo discretodeben relacionar las variables de entrada y salidaen los instantes de muestreo kT
• Ecuaciones en diferencias y((k+1)T)=f(y(kT),u(kT))
y(t)

ISA, UVA 11
¿Como obtener modelos?
Mediante razonamientos,usando leyes físicas,químicas, etc
Mediante experimentacióny análisis de datos

ISA, UVA 12
Modelos de conocimiento
• Se obtienen mediante razonamientos y la aplicación de principios de conservación de masa, energía, momento, etc. y otras leyes particulares del dominio de aplicación
• Tienen validez general• Requieren conocimiento profundo del
proceso y de las leyes fisico-químicas
ISA, UVA 13
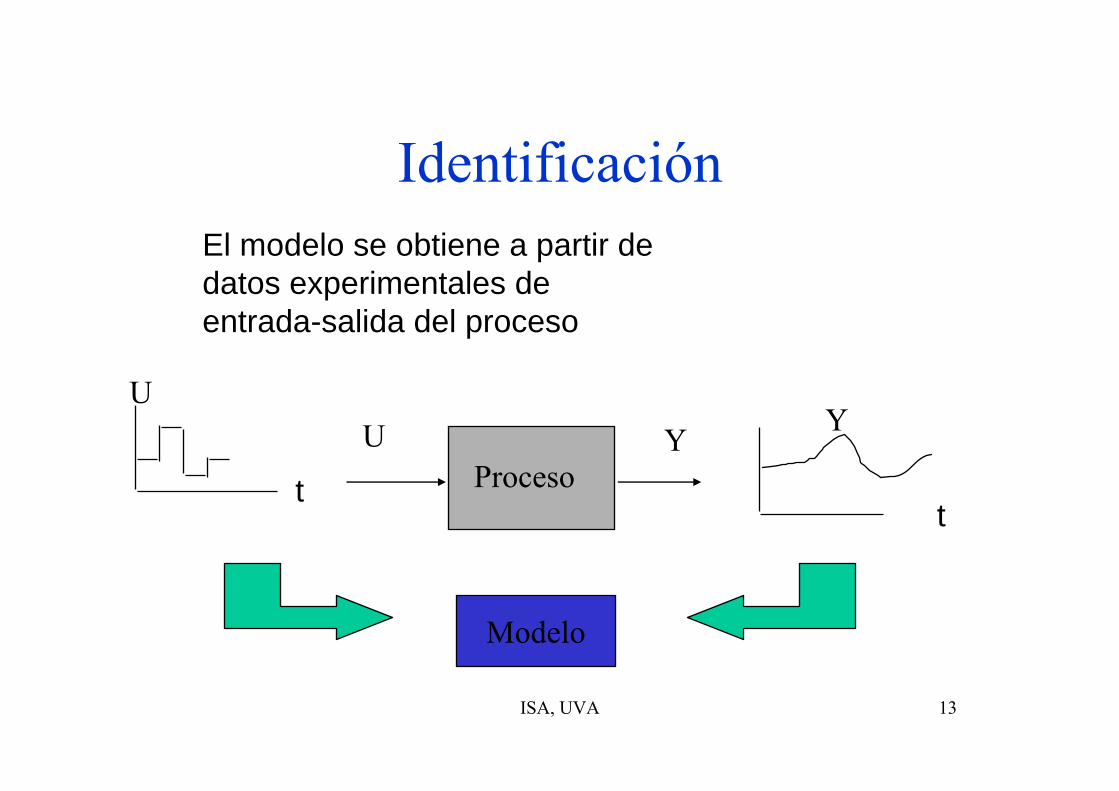
IdentificaciónEl modelo se obtiene a partir de datos experimentales de entrada-salida del proceso
tt
YUU
Y
Proceso
Modelo

ISA, UVA 14
Modelos de conocimientoMetodología de modelado:
⌦Establecer los límites y objetivos del modelo⌦Establecer las hipótesis básicas⌦Escribir las ecuaciones usando leyes de conservación y del dominio de aplicación⌦Estimar el valor de los parámetros⌦Validar el modelo

ISA, UVA 15
Tipos de modelos
• Parámetros concentrados• Parámetros distribuidos• No-lineales• Lineales• Tiempo• Frecuencia• ….

ISA, UVA 16
Conservación de masaAcumulación de masa en el sistema por unidad de tiempo =
Masa que entra al sistema por unidad de tiempo -
Masa que sale del sistema por unidad de tiempo +
Masa que se genera en el sistema por unidad de tiempo -
Masa que se consume en el sistema por unidad de tiempo
CGFFtdmd
0i −+−=
m
Fi F0G C

ISA, UVA 17
Ejemplo: DepósitoConservación de masa
Acumulación=flujo entrada q - flujo salida F
m masa en el depósitoA sección del depósitoρ densidad, k constante
q
h
F
hkqtdhdA
hkF ghpp
ppSkSvF hAm
Fqtdmd
01
011
ρ−ρ=ρ
=ρ+=
−==ρ=
ρ−ρ=
p0
p1

ISA, UVA 18
Ejemplo: DepósitoConservación de masa
Acumulación=flujo entrada q - flujo salida F
m masa en el depósitoA sección del depósitoρ densidad, k constante u posición de la válvula
q
h
F
Ecuación diferencial no-lineal
AhV hukqtdhdA
hukF hAm
Fqtdmd
=−=
=ρ=
ρ−ρ=
Ecuación algebraica
u

ISA, UVA 19
Modelos en variables de estado
)),(),(,()(
)),(),(),(()(
ttvtuxgty
ttvtutxfdt
txd
=
=
Variables manipuladas
Respuestas observables
u yx
x Estados
perturbacionesv

ISA, UVA 20
SimulaciónIntegrando numéricamente el modelo pueden obtenerse los valores del volumen de líquido en función de los valores de q
q
h
F AhV hAukq
A1
tdhd
=−=
Integración numérica mediante el método de Euler
t)t(hA
k)t(u)t(qA1)t(h)tt(h Δ⎥⎦
⎤⎢⎣⎡ −+=Δ+
ISA, UVA 21
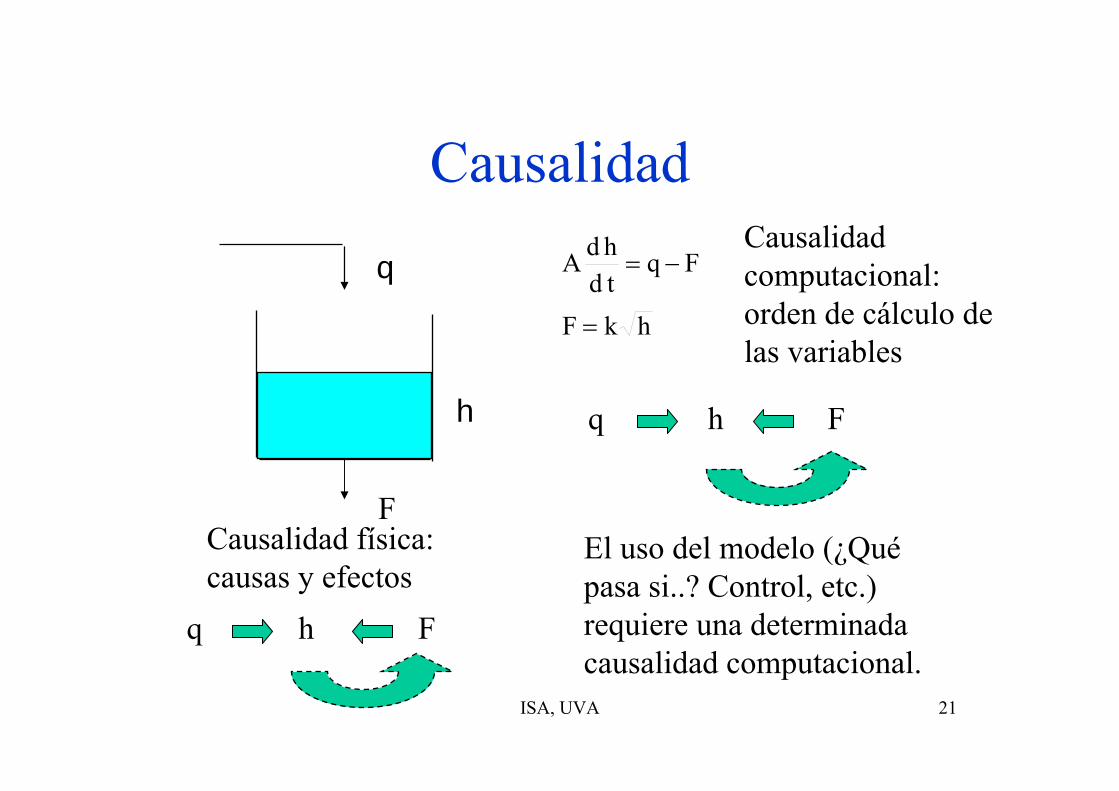
Causalidad
q
h
FCausalidad física: causas y efectos
q h F
hkF
FqtdhdA
=
−=Causalidad computacional: orden de cálculo de las variables
q h F
El uso del modelo (¿Quépasa si..? Control, etc.) requiere una determinada causalidad computacional.

ISA, UVA 22
Hipótesis
q
h
F
q
h
F
ci
c
Fcqctd
Vcdi −=
Mezcla perfecta Flujo pistón
)FVt(c)
AvAht(c)
vht(c)t(c iii −=−=−=
ISA, UVA 23
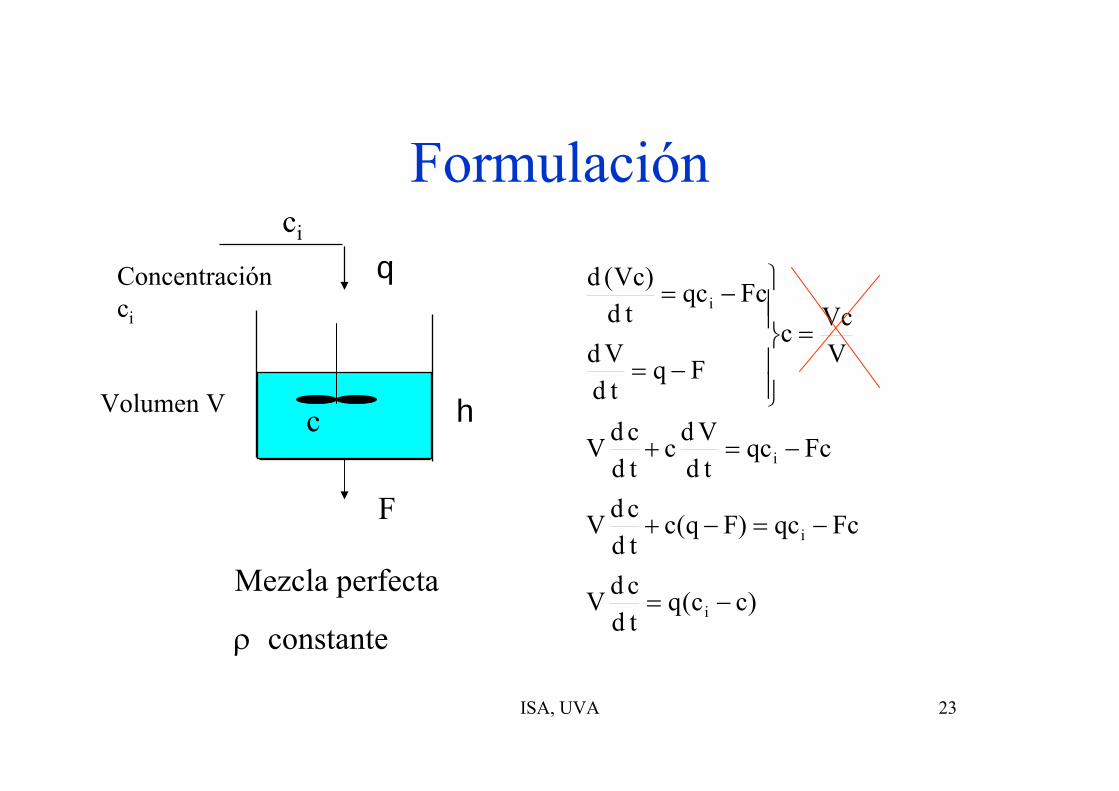
Formulación
q
h
F
ci
c
)cc(qtdcdV
Fcqc)Fq(ctdcdV
FcqctdVdc
tdcdV
VVcc
FqtdVd
Fcqctd
)Vc(d
i
i
i
i
−=
−=−+
−=+
=
⎪⎪⎭
⎪⎪⎬
⎫
−=
−=
Mezcla perfecta
ρ constante
Volumen V
Concentración ci
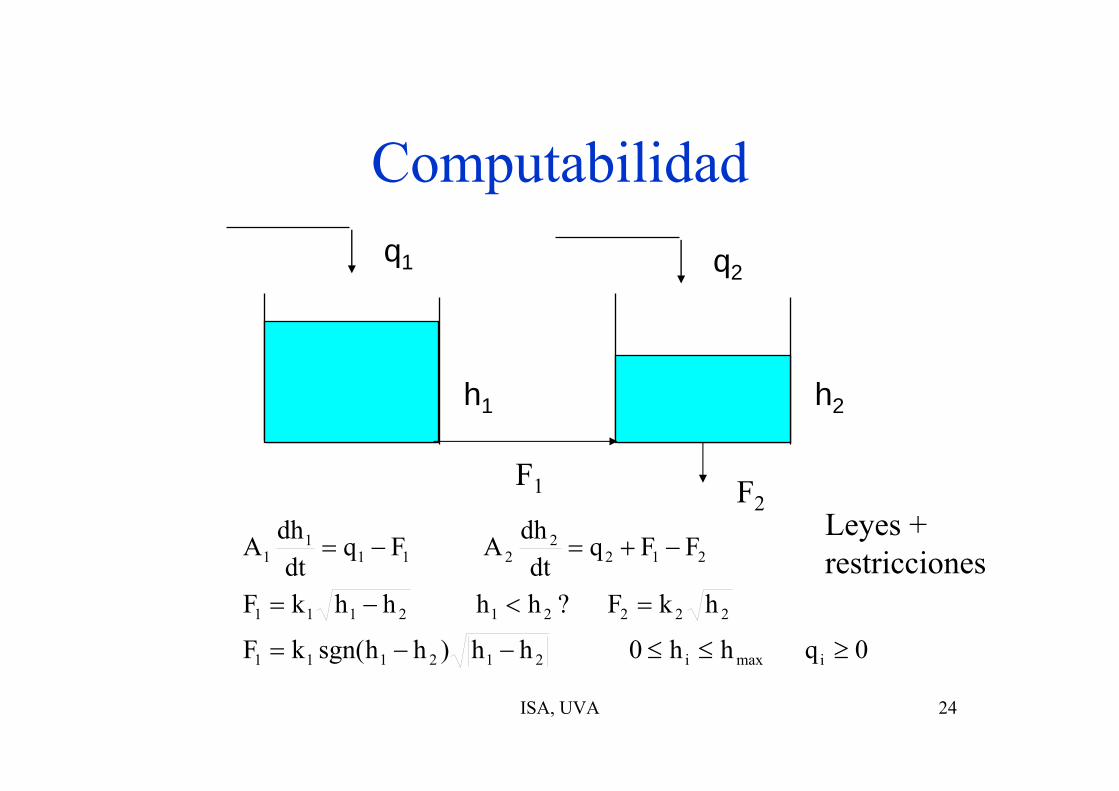
ISA, UVA 24
Computabilidadq1
h1
F1
h2
F2
0q hh0 hh)hhsgn(kF
hkF ?hh hhkF
FFqdt
dhA Fqdt
dhA
imaxi212111
222212111
2122
2111
1
≥≤≤−−=
=<−=
−+=−=
q2
Leyes + restricciones

ISA, UVA 25
Reactor Químico Isotermo
Reactor
FT
AT
Productos
Materia prima
Reacción:
A
A, B
A B

ISA, UVA 26
Modelo Matemático
A ⇒ B
F
CA CB T
CAi , Ti
Producto AHipótesis:
•Mezcla perfecta en el reactor
•Temperatura T constante
•Volumen constante V
Balance másico del producto ABalance másico del producto B
Vd cd t
Fc Fc Vke cAAi A
ERT
A= − − −
Vd cd t
Fc Vke cBB
ERT
A= − + −

ISA, UVA 27
Presión en un recipiente
2f
2vi
2f
2vii
ppaCFtdpd
RTVM
isotermo que tanRTM
p Vm
ppaCFFFtdmd
−−=
ρ=ρ=
−−=−= Fi
Fa
p
pf

ISA, UVA 28
Conservación de energía
T temperatura, V voltajem masa en el depósitoH entalpia, ce calor específicoA sección del depósitoρ densidad, R resistencia
q
Ecuación diferencial no-lineal
RcV)TT(q
tdTdAh
Ahm TcH si
RVHqHq
td)mH(d
e
2
i
e
2
i
ρ+−=
ρ==
+ρ−ρ=
V R T
Hipótesis:
T uniforme en el depósito Aislamiento perfecto densidad constante
Ti
ISA, UVA 29
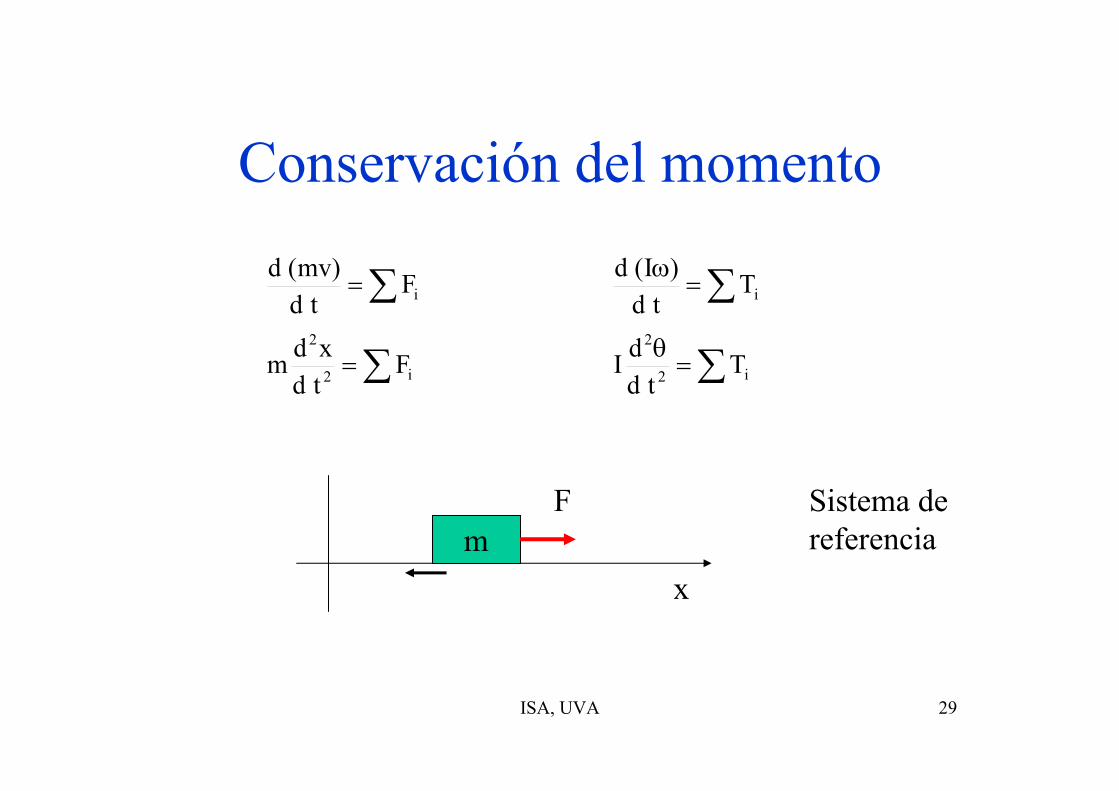
Conservación del momento
∑
∑
=
=
i2
2
i
Ftdxdm
Ftd
)mv(d
xm
F Sistema de referencia
∑
∑
=θ
=ω
i2
2
i
Ttd
dI
Ttd
)I(d
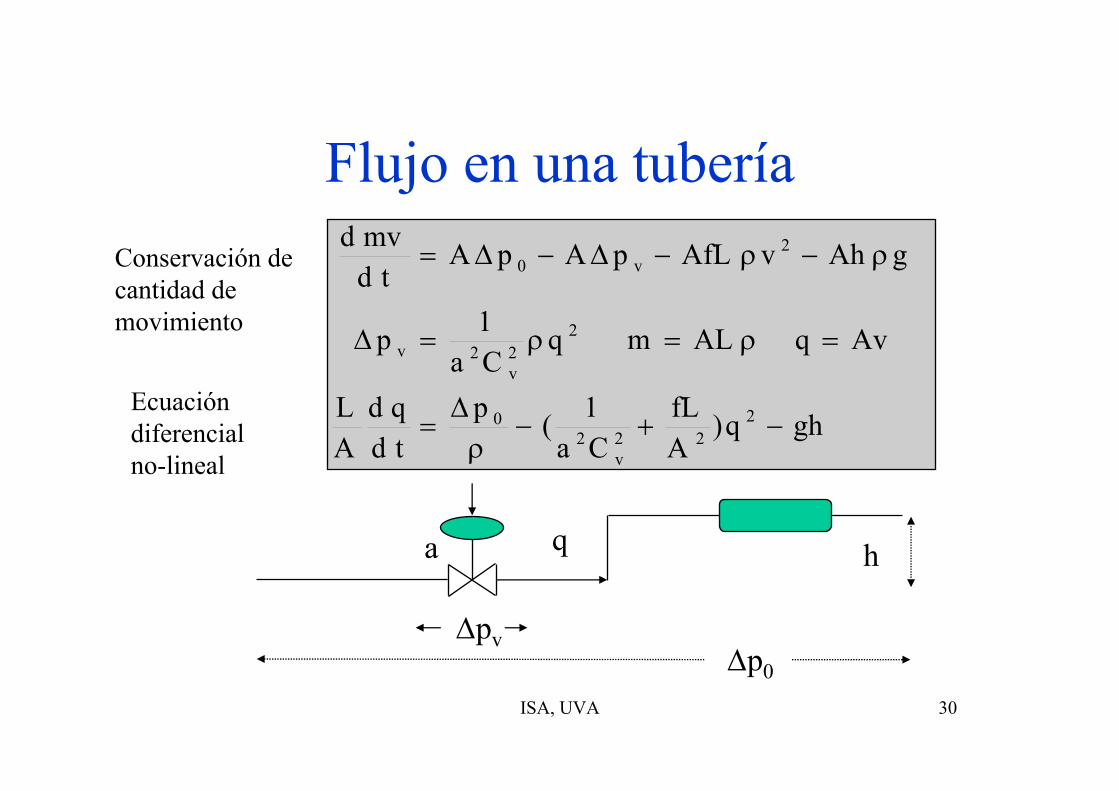
ISA, UVA 30
q
Δpv
a h
Δp0
ghq)AfL
Ca1(p
tdqd
AL
Avq ALm qCa1p
gAhvAfLpApAtd
mvd
222
v2
0
22v
2v
2v0
−+−ρ
Δ=
=ρ=ρ=Δ
ρ−ρ−Δ−Δ=
Flujo en una tuberíaConservación de cantidad de movimiento
Ecuación diferencial no-lineal

ISA, UVA 31
Válvula de regulación
Aire
Aire abre
Aire
Aire abre
Muelle
Diafragma
Líquido
Fricción
2
0 v v2
vv
d x dxm (p p )A p S kx kdt dt
pxq CL
= − + Δ − −
Δ=
ρ
x desplazamiento desdela posición de equilibrio
L carrera de la válvula
p presión de aire
x
p
ISA, UVA 32
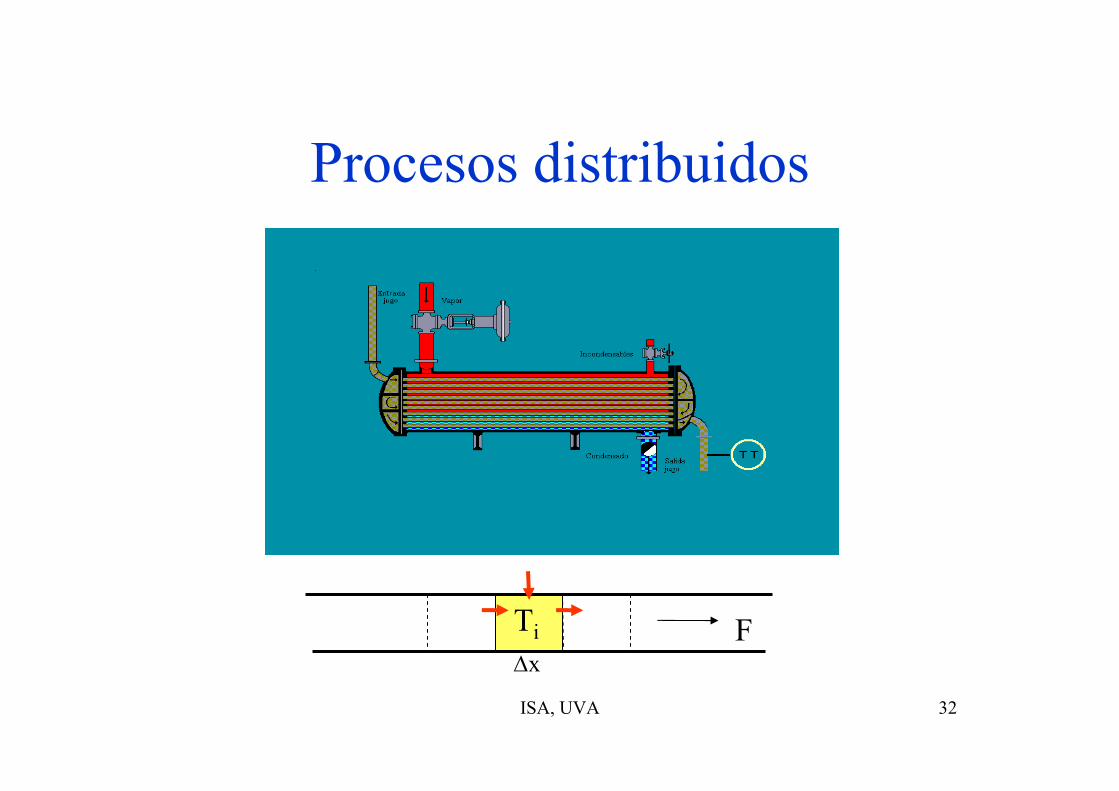
Procesos distribuidos
Δx
Ti F

ISA, UVA 33
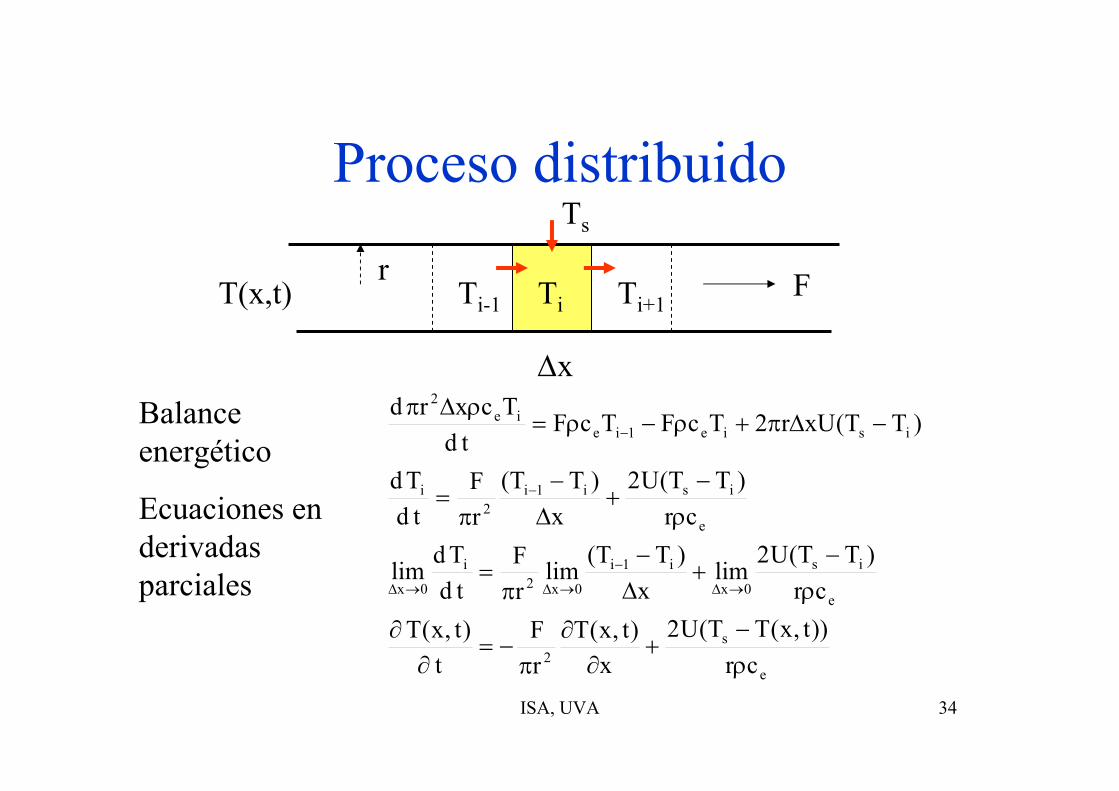
Proceso distribuido
Δx
Ti Ti+1Ti-1
Ts
F
Se divide el proceso en celdas de ancho Δx en las que T pueda considerarse uniforme
Balance de energía en un elemento
Limite cuando Δx → 0
T(x,t)
x
ISA, UVA 34
Proceso distribuido
Δx
Ti Ti+1Ti-1
Ts
FT(x,t)
e
s2
e
is
0x
i1i
0x2i
0x
e
isi1i2
i
isie1ieie
2
cr))t,x(TT(U2
x)t,x(T
rF
t)t,x(T
cr)TT(U2
limx
)TT(lim
rF
tdTd
lim
cr)TT(U2
x)TT(
rF
tdTd
)TT(xUr2TcFTcFtd
Tcxrd
ρ−
+∂
∂π
−=∂
∂
ρ−
+Δ−
π=
ρ−
+Δ−
π=
−Δπ+ρ−ρ=ρΔπ
→Δ
−
→Δ→Δ
−
−
r
Balance energético
Ecuaciones en derivadas parciales

ISA, UVA 35
Modelos de conocimiento
• Formados por conjuntos de ecuaciones diferenciales y algebraicas frecuentemente no lineales
• Utiles para muchos fines• Requieren ciertos conocimientos• Difíciles de manipular matemáticamente• Se resuelven mediante simulación

ISA, UVA 36
Simulación: EcosimPro
• Lenguaje de Modelado / Simulación• ¿Qué pasa si…?• Basado en tecnología orientada a objetos• Métodos numéricos y funcionalidades avanzadas• ESA: Agencia Europea del Espacio• Generador de código C++ con un entorno de
desarrollo y ejecución• Librería / Componente / Partición / Experimento• Abierto

ISA, UVA 37
EcosimPro
ISA, UVA 38
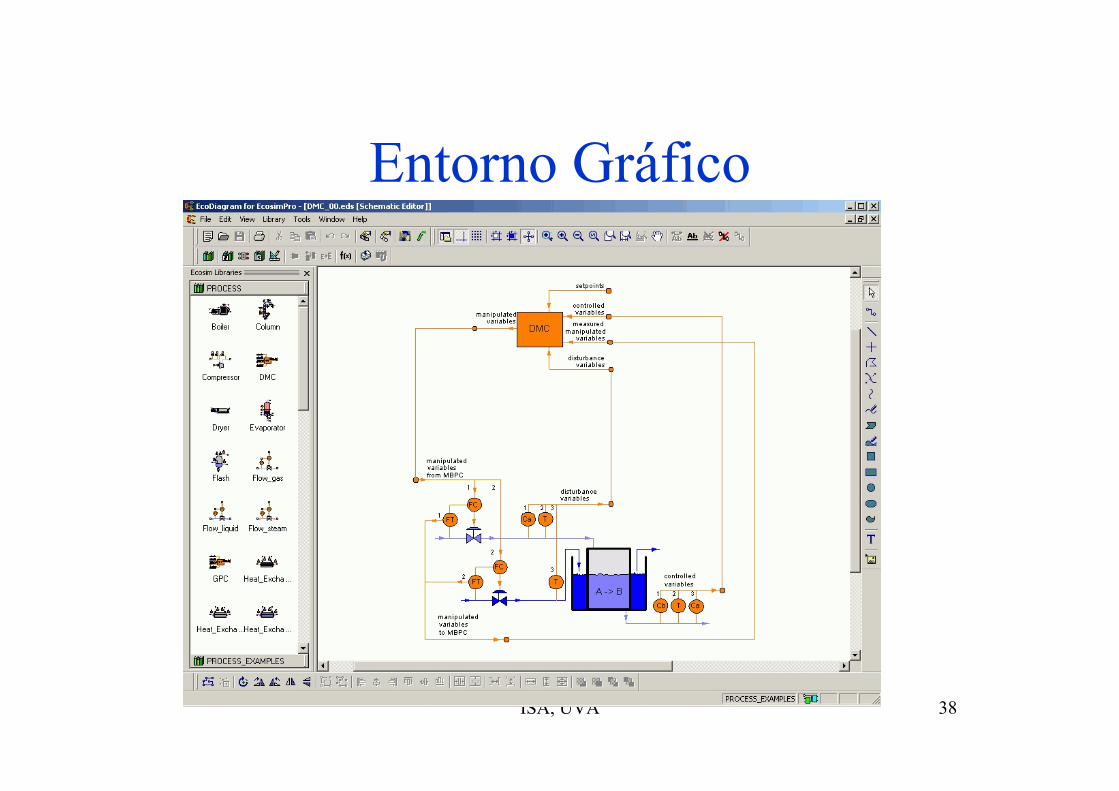
Entorno Gráfico
ISA, UVA 39
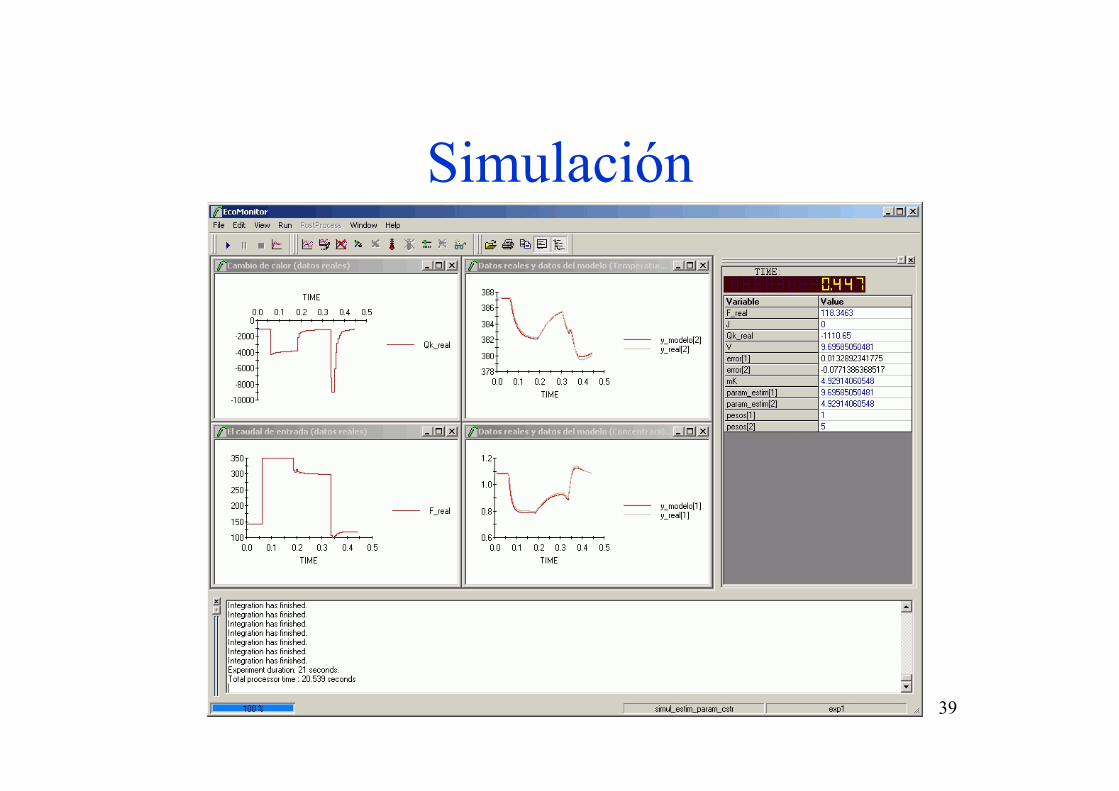
Simulación

ISA, UVA 40
Modelos linealizados• Aproximaciones lineales de las ecuaciones
no-lineales• Mas fáciles de manipular matemáticamente
pero su rango de validez es limitado
hkqtdhdA −= hq
tdhdA Δα−Δβ=Δ

ISA, UVA 41
Linealización
Desarrollo en serie de Taylor sobre un punto de operación u0, y0, z0, ….
...)zz(zf)yy(
yf)uu(
uf)z,y,u(f)z,y,u(f
0)z,y,u(f 0)z,y,u(f
00
00
00
000
000
+−∂∂+−
∂∂+−
∂∂+=
==
zzz yyy uuu 0zzfy
yfu
uf
000000
−=Δ−=Δ−=Δ=Δ∂∂+Δ
∂∂+Δ
∂∂
Ecuación lineal en las nuevas variables Δu, Δy, Δz
ISA, UVA 42
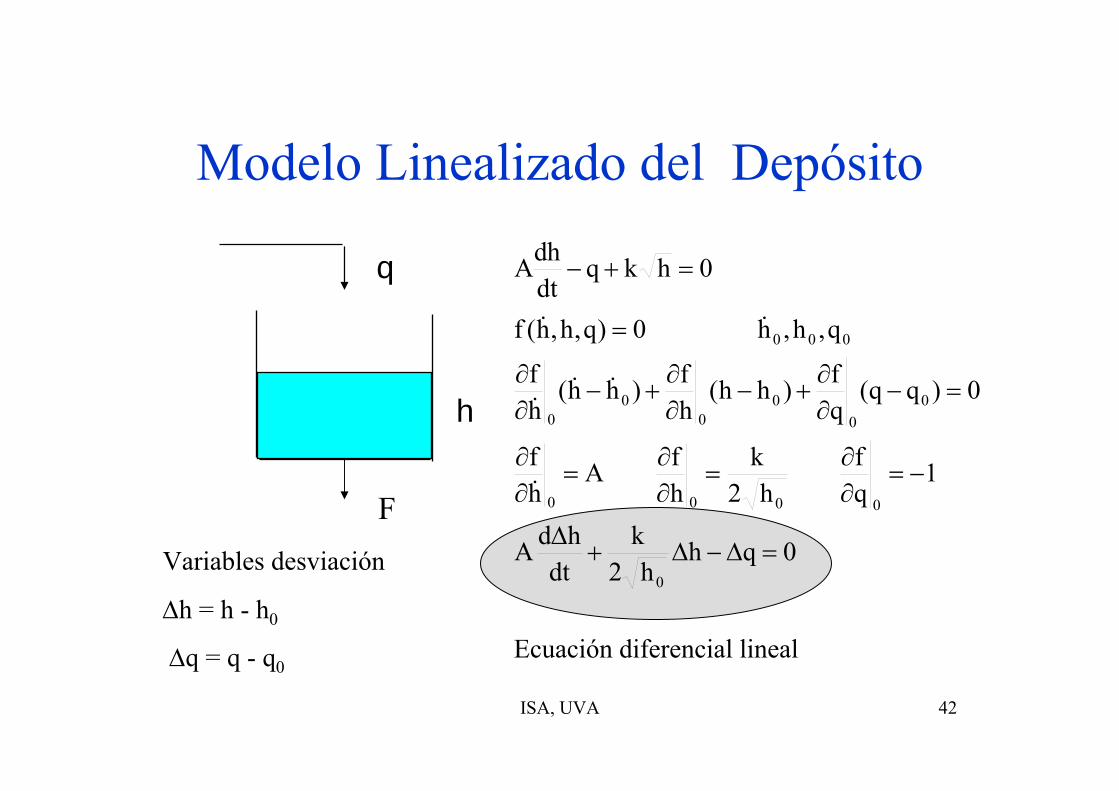
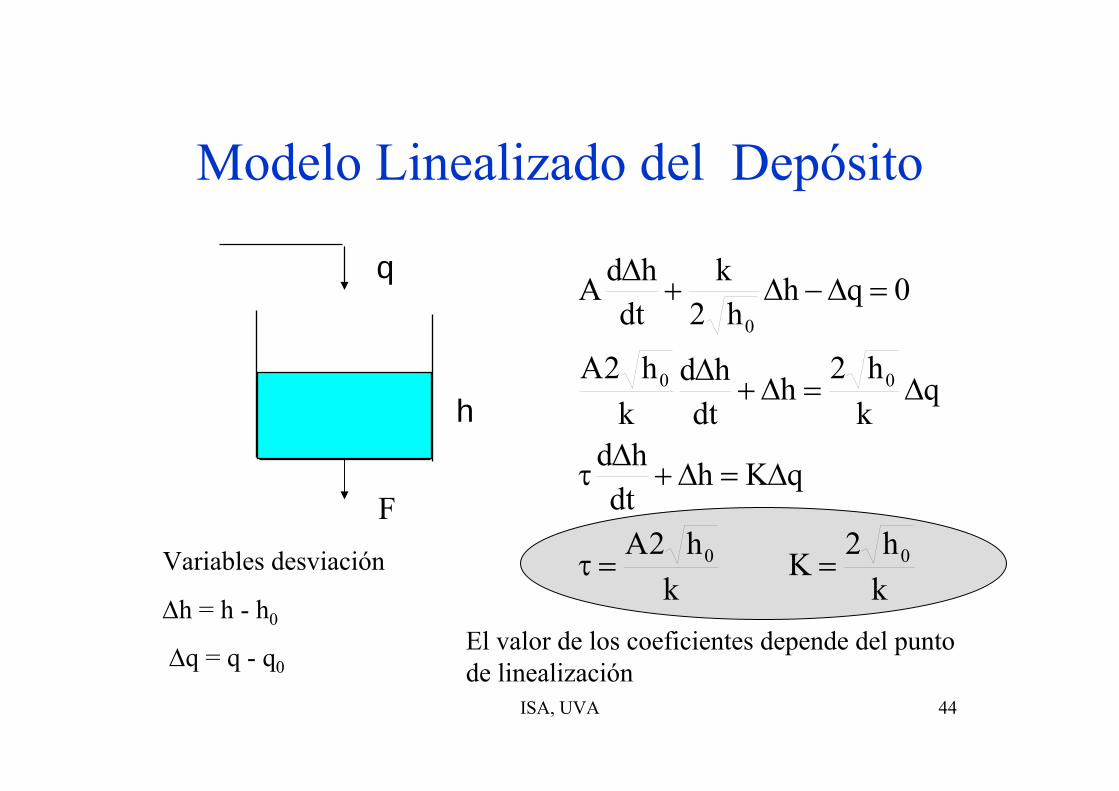
Modelo Linealizado del Depósito
q
h
F
Ecuación diferencial lineal
0qhh2
kdt
hdA
1qf
h2k
hf A
hf
0)qq(qf)hh(
hf)hh(
hf
q,h,h 0)q,h,h(f
0hkqtdhdA
0
0000
00
00
00
000
=Δ−Δ+Δ
−=∂∂=
∂∂=
∂∂
=−∂∂+−
∂∂+−
∂∂
=
=+−
&
&&&
&&
Variables desviación
Δh = h - h0
Δq = q - q0

ISA, UVA 43
Simulación
4.0
4.2
4.4
4.6
4.8
5.0
0 10 20 30 40TIME
hh_l
5.0
5.1
5.2
5.3
5.4
5.5
0 10 20 30 40TIME
q
4
5
6
7
8
0 10 20 30 40TIME
hh_l
5.0
5.5
6.0
6.5
7.0
0 10 20 30 40TIME
q
Respuestas del modelo no –lineal y linealizado para 2 saltos en q
ISA, UVA 44
Modelo Linealizado del Depósito
q
h
F
El valor de los coeficientes depende del punto de linealización
kh2
K k
h2A
qKhdt
hd
qkh2
hdt
hdk
h2A
0qhh2
kdt
hdA
00
00
0
==τ
Δ=Δ+Δτ
Δ=Δ+Δ
=Δ−Δ+Δ
Variables desviación
Δh = h - h0
Δq = q - q0

ISA, UVA 45
Modelos linealizados
tt
YUU0
UY0
Y
las variables u e y soncambios sobre un punto de operación U0 , Y0
El rango de validez está limitado a un entorno del punto de operación
Proceso
)t(Y)t(Y)t(y)t(U)t(U)t(u
0
0
−=−=
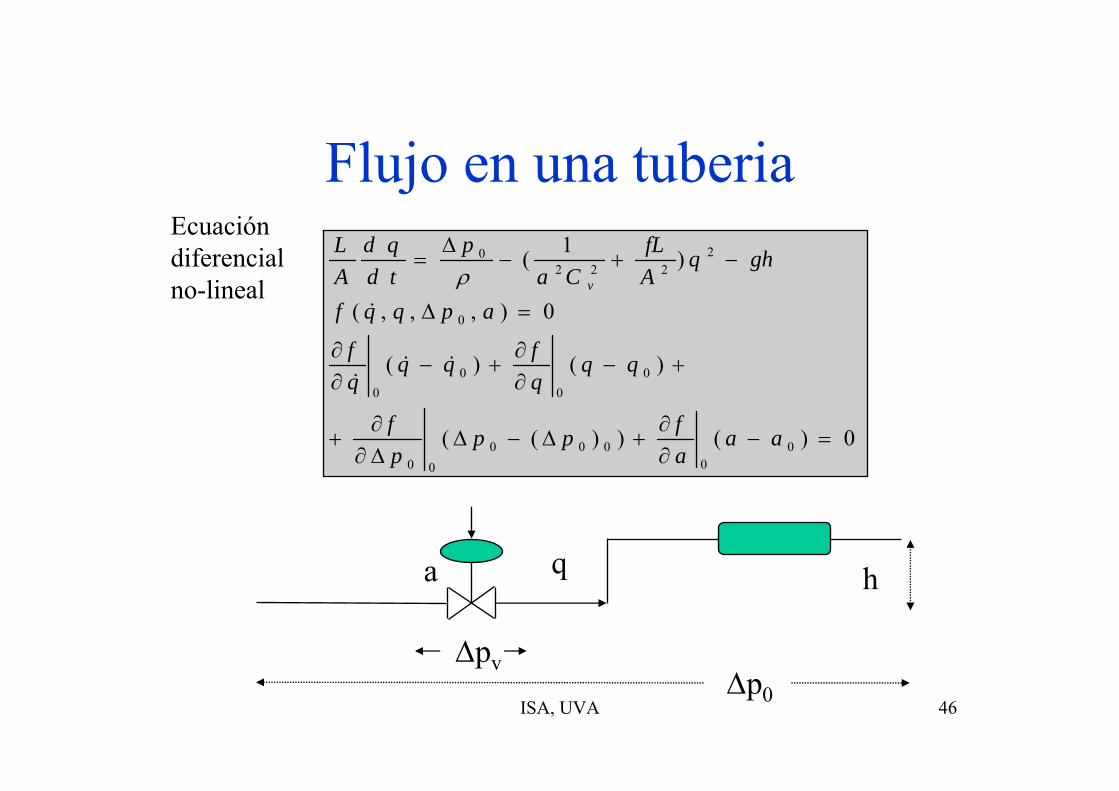
ISA, UVA 46
q
Δpv
a h
Δp0
0)())((
)()(
0),,,(
)1(
00
00000
00
00
0
2222
0
=−∂∂
+Δ−ΔΔ∂∂
+
+−∂∂
+−∂∂
=Δ
−+−Δ
=
aaafpp
pf
qqqfqq
qf
apqqf
ghqAfL
Cap
tdqd
AL
v
&&&
&
ρ
Flujo en una tuberiaEcuación diferencial no-lineal

ISA, UVA 47
Modelo linealizado del flujo
aK)p(Kqtdqd
]aqCa2)p([
q2)AfL
Ca1(
1
qtdqd
q2)AfL
Ca1(
LA
1
]aqCa2qq2)
AfL
Ca1()p([
LA
tdqd
]ghq)AfL
Ca1(p[
LA
tdqd
201
0
22v
30
022
v2
022
v2
0
22v
30
22v
20
222
v2
0
Δ+ΔΔ=Δ+Δτ
Δ⎭⎬⎫
⎩⎨⎧
ρ+ΔΔ
⎭⎬⎫
⎩⎨⎧
+ρ=
=Δ+Δ
⎭⎬⎫
⎩⎨⎧
+
Δ⎭⎬⎫
⎩⎨⎧
+Δ⎭⎬⎫
⎩⎨⎧
+−ρΔΔ=Δ
−+−ρΔ=

ISA, UVA 48
Cambios del punto de operación
02
2v
22v
22
022
v2
201
)A
CfLa1Ca(a
qK q2)
AfL
Ca1(
LA
1
aK)p(Kqtdqd
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
++β=
⎭⎬⎫
⎩⎨⎧
++β=τ
Δ+ΔΔ=Δ+Δ
τ
q
t
τ crece en puntos de operación con apertura alta K2 decrece en puntos de operación con apertura alta
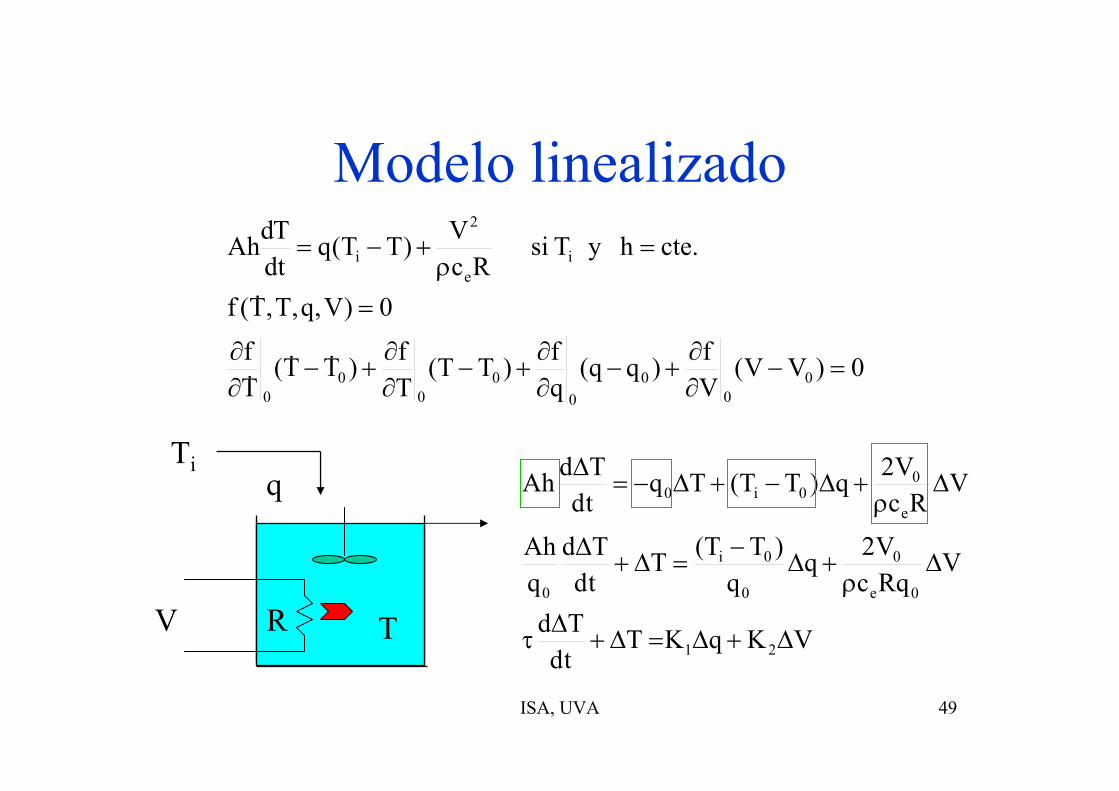
ISA, UVA 49
Modelo linealizado
q
0)VV(Vf)qq(
qf)TT(
Tf)TT(
Tf
0)V,q,T,T(f
cte.h y T si Rc
V)TT(qtdTdAh
00
00
00
00
ie
2
i
=−∂∂+−
∂∂+−
∂∂+−
∂∂
=
=ρ
+−=
&&&
&
V R T
TiV
RcV2q)TT(Tq
tdTdAh
e
00i0 Δ
ρ+Δ−+Δ−=Δ
VKqKTtdTd
VRqcV2q
q)TT(T
tdTd
qAh
21
0e
0
0
0i
0
Δ+Δ=Δ+Δτ
Δρ
+Δ−=Δ+Δ

ISA, UVA 50
Semejanza formal
q
V R T
Ti
VKqKTtdTd
21 Δ+Δ=Δ+Δτ
q
Δpv
a h
Δp0
aK)p(Kqtdqd
201 Δ+ΔΔ=Δ+Δτ

ISA, UVA 51
Modelo linealizado del reactor
A ⇒ B
F
CA CB T
CAi Producto AVd cd t
Fc Fc Vke cAAi A
ERT
A= − − −
Vd cd t
Fc Vke cBB
ERT
A= − + −
Dos ecuaciones
0)F,c,c,c(f0)c,F,c,c(f
ABB2
AiAA1
==
&
&
F

ISA, UVA 52
Modelo linealizado (1)
Ai00A0AiART
E
0A cFF)cc(c)VkeF(
tdcdV 0 Δ+Δ−+Δ+−=Δ −
Punto de operación:0Ai0B0A0 c,c,c,F
Valor calculado en el punto de operación
Vd cd t
Fc Fc Vke cAAi A
ERT
A= − − −
Desarrollando en serie de Taylor.....
Ai00A0Ai
ART
E0A c
VFF
V)cc(c)ke
VF(
tdcd
0 Δ+Δ−+Δ+−=Δ −
Ai1111A11A cdFbca
tdcd Δ+Δ+Δ=Δ

ISA, UVA 53
Punto de linealización
0cVkeFcFctd
cdV ART
E
AAiA =−−=
−
0cVkeFctd
cdV ART
E
BB =+−=
−
Si el punto de linealización corresponde a una operación en equilibrio:
Si cAi0 = 8 y cA0 = 0.8 ⇒ cB0 = 7.2
Si F0 = 26.66 y V = 80 ⇒ ke-E/RT = 2.999
Ai00A0AiART
E
0A cFF)cc(c)VkeF(
tdcdV 0 Δ+Δ−+Δ+−=Δ −
AiAAi00A0Ai
ART
E0A c333.0F09.0c332.3c
VFF
V)cc(c)ke
VF(
tdcd
0 Δ+Δ+Δ−=Δ+Δ−+Δ+−=Δ −
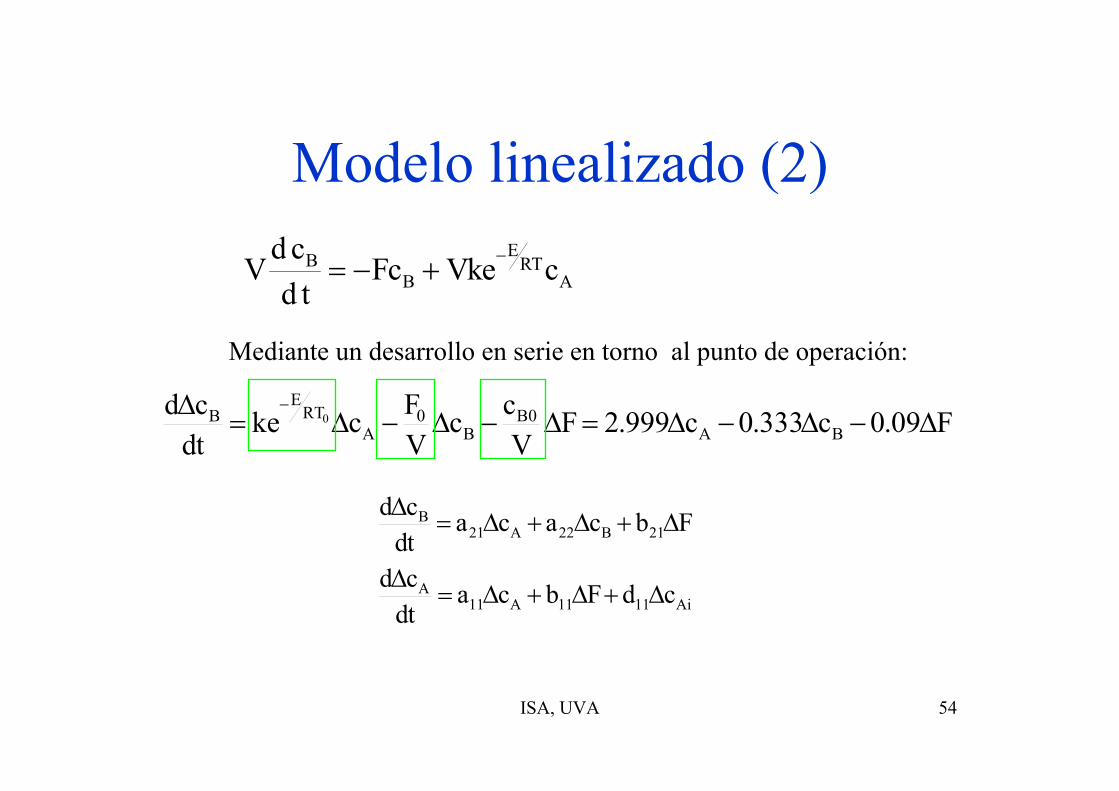
ISA, UVA 54
Modelo linealizado (2)
F09.0c333.0c999.2FV
ccVFcke
tdcd
BA0B
B0
ART
EB 0 Δ−Δ−Δ=Δ−Δ−Δ=Δ −
Fbcacatdcd
21B22A21B Δ+Δ+Δ=Δ
Vd cd t
Fc Vke cBB
ERT
A= − + −
Mediante un desarrollo en serie en torno al punto de operación:
Ai1111A11A cdFbca
tdcd Δ+Δ+Δ=Δ
ISA, UVA 55
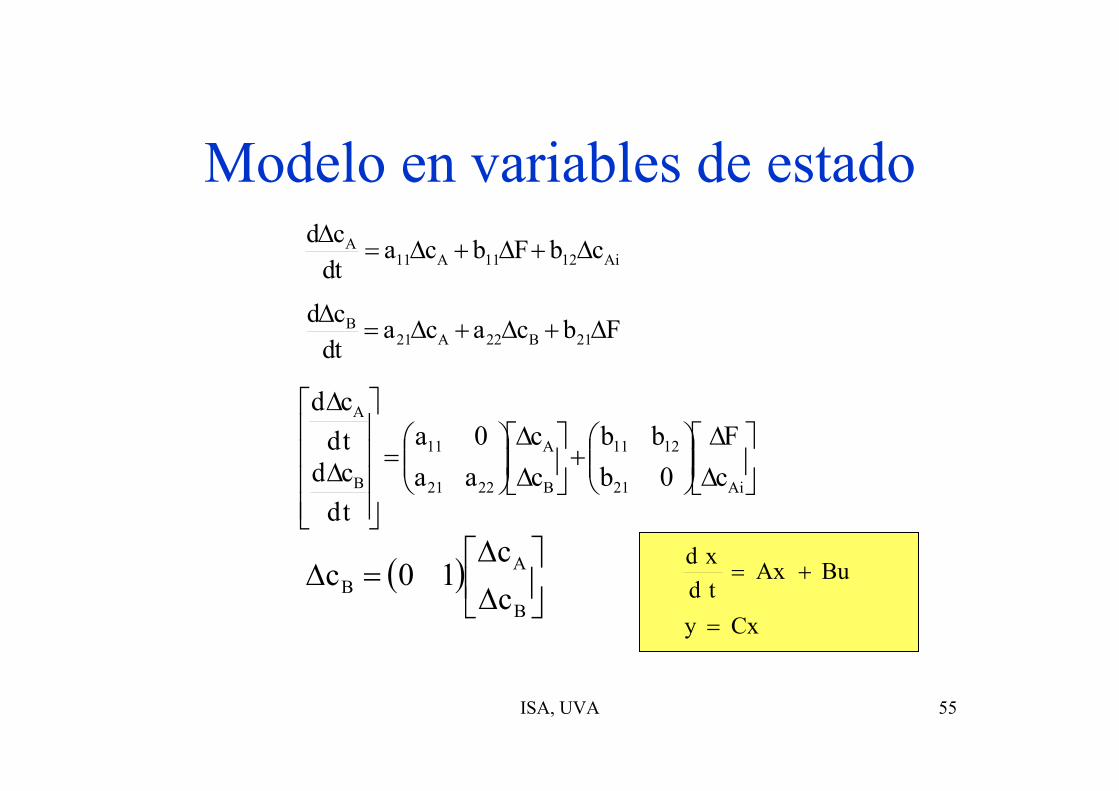
Modelo en variables de estado
⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎟⎠
⎞⎜⎜⎝
⎛=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
Δ
Ai21
1211
B
A
2221
11
B
A
cF
0bbb
cc
aa0a
tdcdtdcd
Fbcacatdcd
21B22A21B Δ+Δ+Δ=Δ
Ai1211A11A cbFbca
tdcd Δ+Δ+Δ=Δ
( ) ⎥⎦
⎤⎢⎣
⎡ΔΔ
=ΔB
AB c
c10c
Cxy
BuAxtdxd
=
+=

ISA, UVA 56
Reactor isotermo
⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎠
⎞⎜⎝
⎛−
+⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎠
⎞⎜⎝
⎛−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
Δ
AiB
A
B
A
cF
009.0333.009.0
cc
33.03033.0
tdcdtdcd
( ) ⎥⎦
⎤⎢⎣
⎡ΔΔ
=ΔB
AB c
c10c
A ⇒ B
F
CA CB T
CAi
Producto A
F
Reactor isotermo

ISA, UVA 57
q1qa
)p(KKq1
tdqd
aK)p(Kqtdqd
021
201
Δ=Δ
⎥⎦
⎤⎢⎣
⎡ΔΔΔ
⎟⎠⎞
⎜⎝⎛
ττ+Δ
τ−
=Δ
Δ+ΔΔ=Δ+Δ
τ
Modelos en variables de estado
h.1h
qhdt
hd
qA1h
hA2k
dthd
0
Δ=Δ
Δβ+Δα=Δ
Δ+Δ−=Δq
h
qah
Δp0
Cxy
BuAxtdxd
=
+=

ISA, UVA 58
Modelos en variables de estado
DuCxy
BuAxtdxd
+=
+=x variables de estado: conocido su valor en el instante inicial y los valores de u(t) a lo largo del tiempo, puede determinarse el valor de las salidas a lo largo del tiempo
∫ ττ+= τ−−t
t
tAttA dBuetxetx0
0 )()()( )(0
)(Solución analítica:
ISA, UVA 59
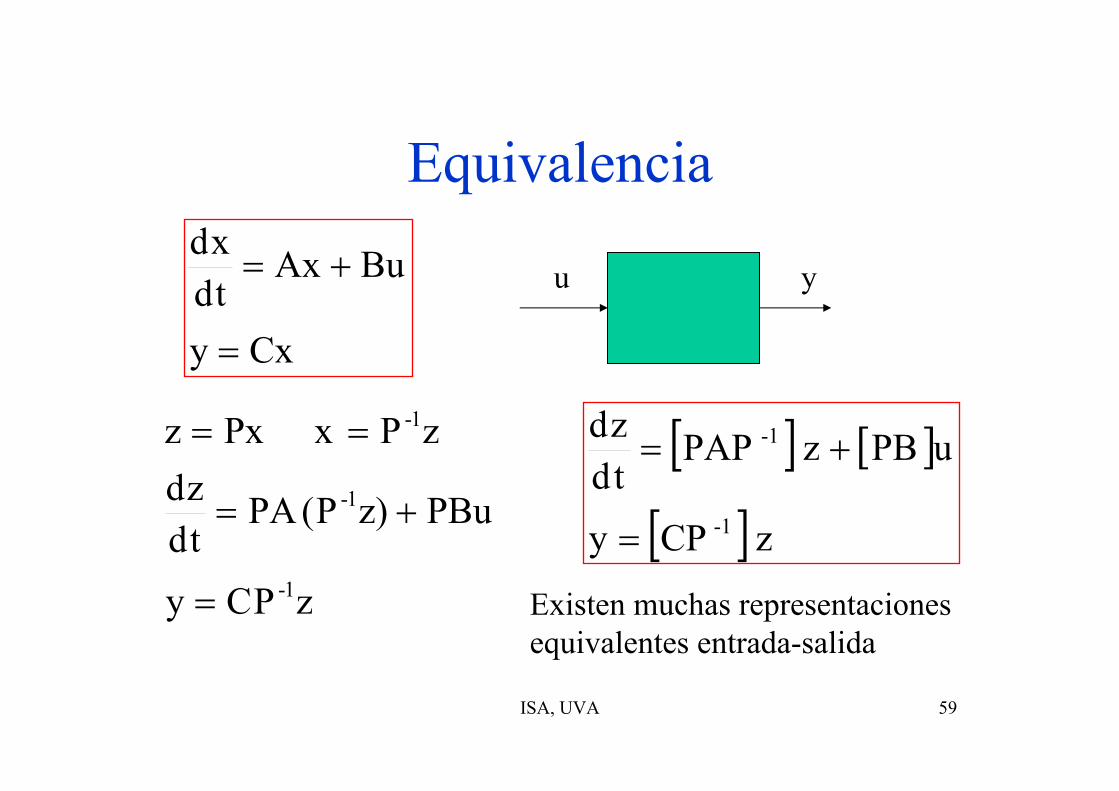
Equivalencia
Cxy
BuAxtdxd
=
+= u y
zPCy
PBuz)P(PAtdzd
zP xPxz
1-
1-
1-
=
+=
== [ ] [ ]
[ ] zCPy
uPB zPAPtdzd
1-
1-
=
+=
Existen muchas representaciones equivalentes entrada-salida
ISA, UVA 60
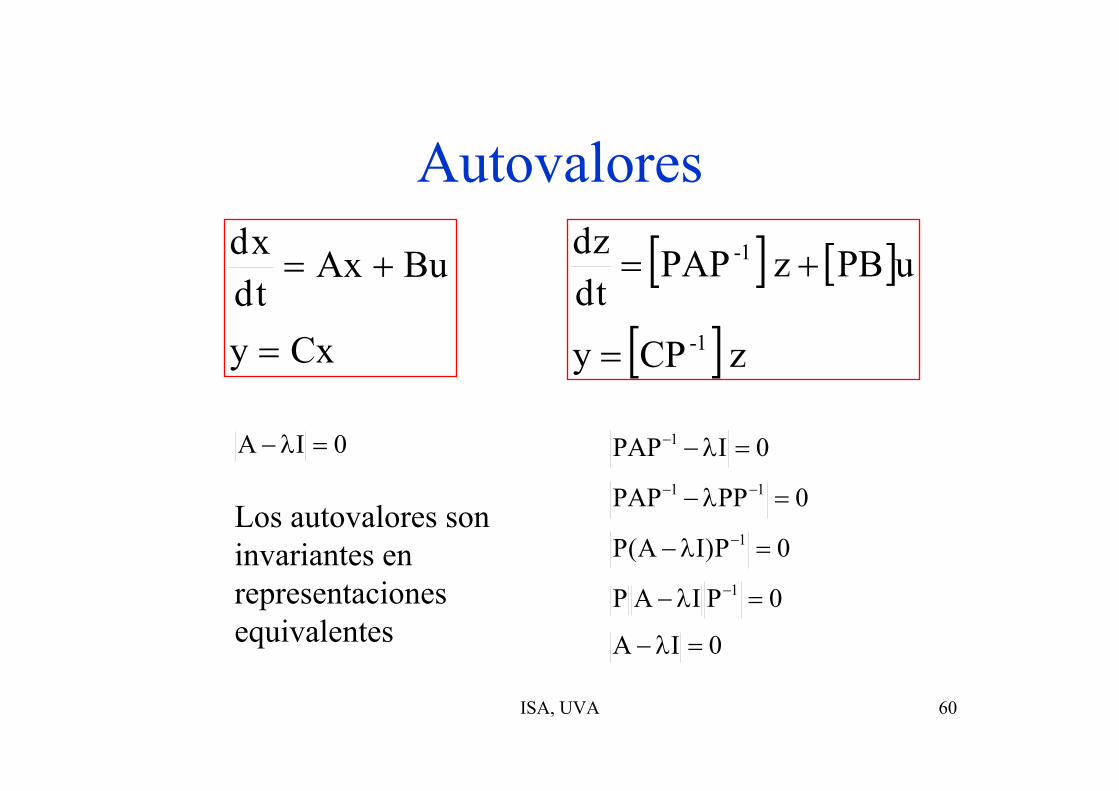
Autovalores
Cxy
BuAxtdxd
=
+= [ ] [ ]
[ ] zCPy
uPB zPAPtdzd
1-
1-
=
+=
0IA =λ−
0IA
0PIAP
0P)IA(P
0PPPAP
0IPAP
1
1
11
1
=λ−
=λ−
=λ−
=λ−
=λ−
−
−
−−
−
Los autovalores son invariantes en representaciones equivalentes
ISA, UVA 61
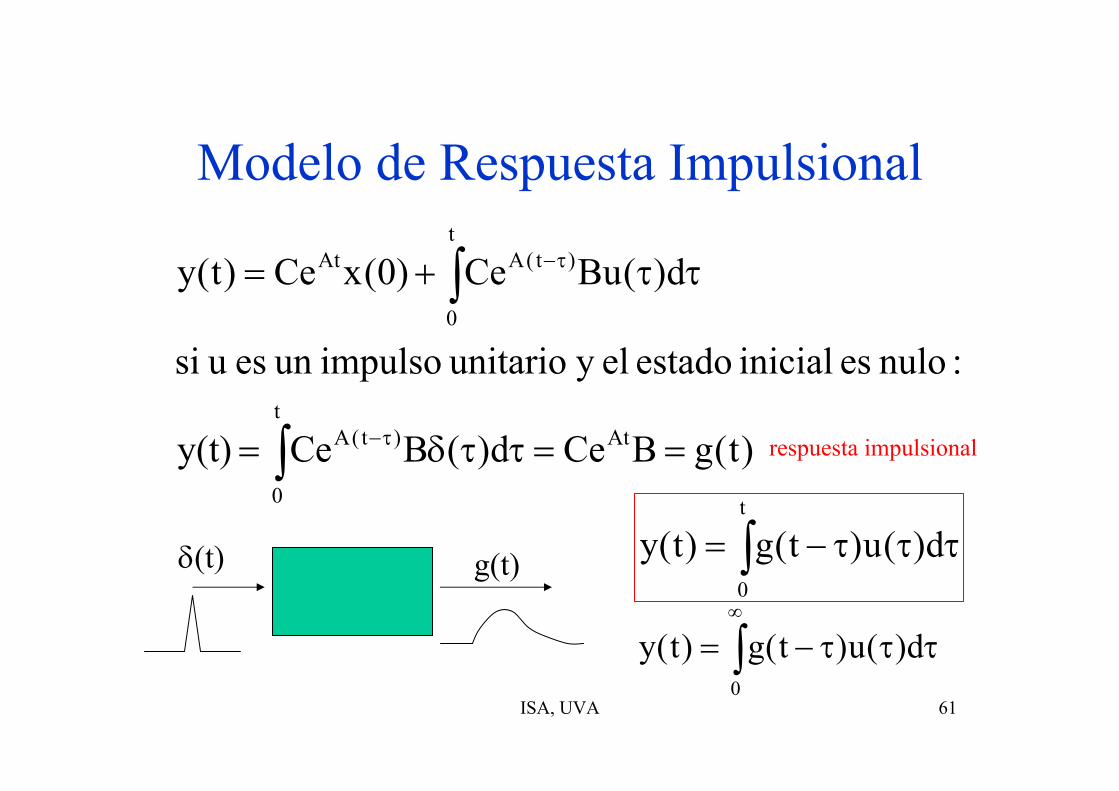
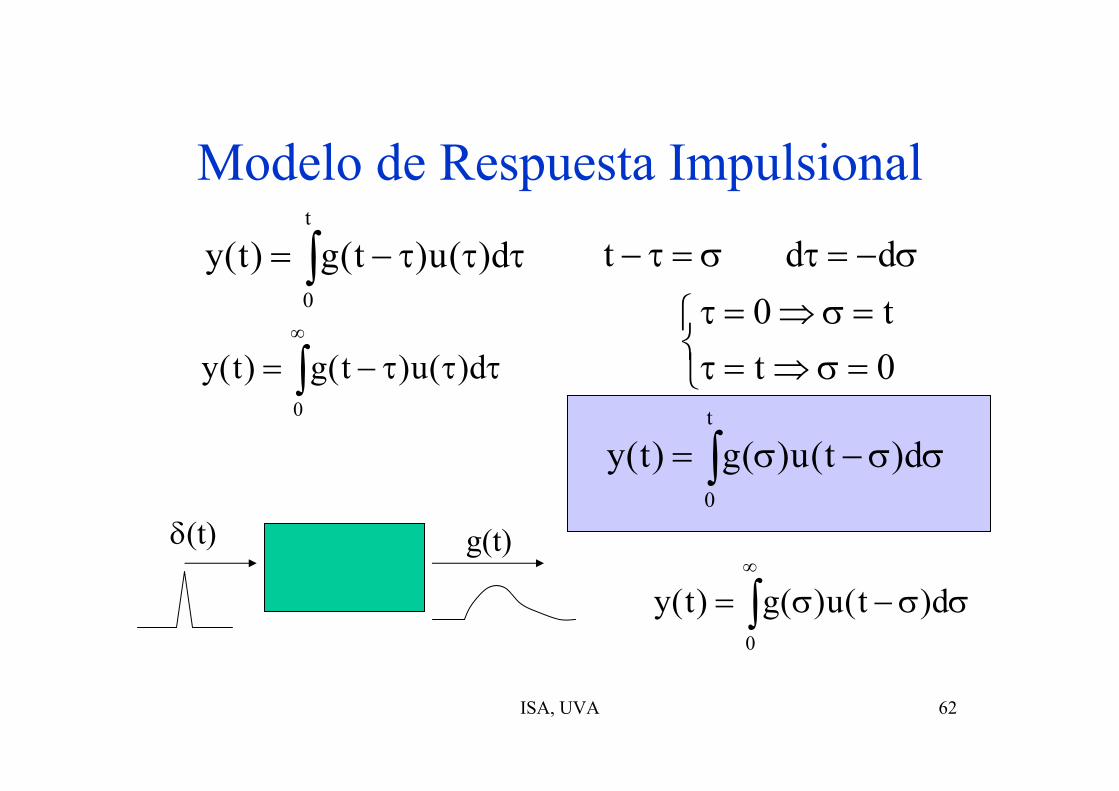
Modelo de Respuesta Impulsional
)t(gBCed)(BCey(t)
:nulo es inicial estado ely unitario impulsoun esu si
d)(BuCe)0(xCe)t(y
Att
0
)t(A
t
0
)t(AAt
==ττδ=
ττ+=
∫
∫
τ−
τ−
g(t)δ(t) ∫ τττ−=t
0
d)(u)t(g)t(y
respuesta impulsional
∫∞
τττ−=0
d)(u)t(g)t(y
ISA, UVA 62
Modelo de Respuesta Impulsional
g(t)δ(t)
∫ τττ−=t
0
d)(u)t(g)t(y
∫ σσ−σ=
⎩⎨⎧
=σ⇒=τ=σ⇒=τ
σ−=τσ=τ−
t
0
d)t(u)(g)t(y
0tt0dd t
∫∞
τττ−=0
d)(u)t(g)t(y
∫∞
σσ−σ=0
d)t(u)(g)t(y

ISA, UVA 63
Transformada de Laplace
[ ]
Laplace de compleja le variabjs
dte)t(f)s(F)t(f0
st
ω+σ=
== ∫∞
−L
f(t) función temporal
f(t) = 0 para t < 0t
f(t)
[ ] [ ])s(G)s(F
)t(g)t(f)t(gf(t) si
===
LL Cambio de variable t ⇒ s
ISA, UVA 64
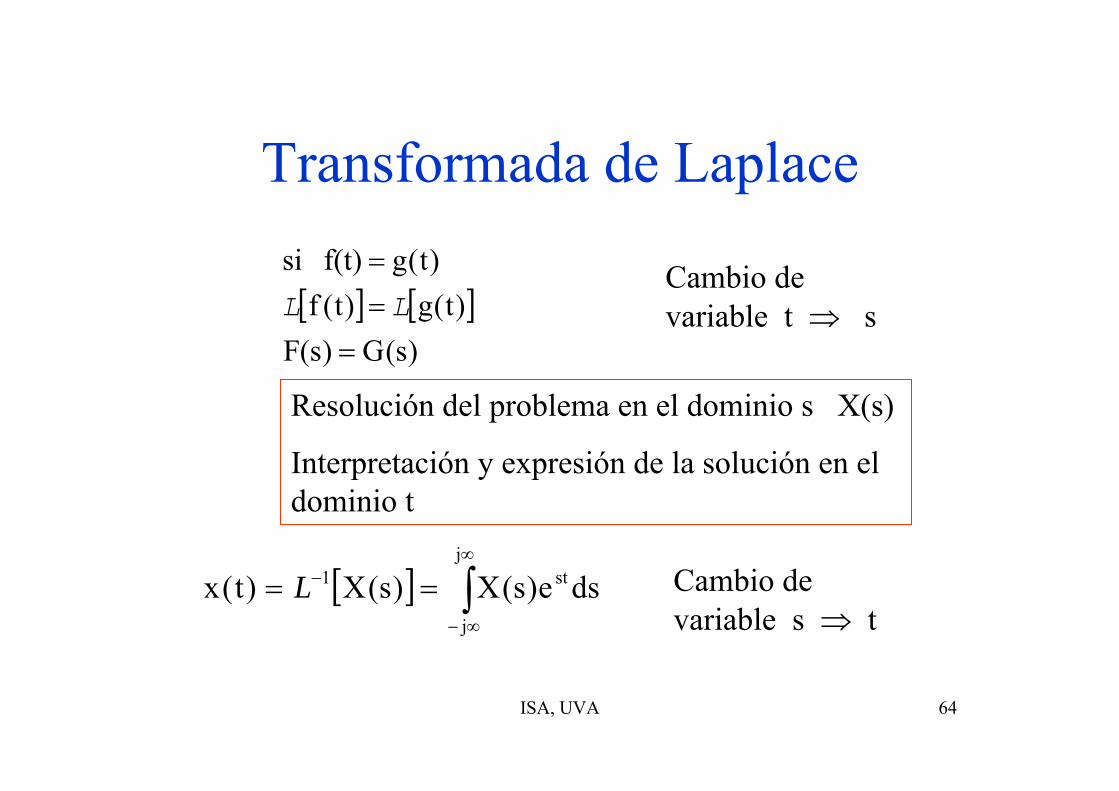
Transformada de Laplace
[ ] [ ])s(G)s(F
)t(g)t(f)t(gf(t) si
===
LLCambio de variable t ⇒ s
Resolución del problema en el dominio s X(s)
Interpretación y expresión de la solución en el dominio t
Cambio de variable s ⇒ t
[ ] ∫∞
∞−
− ==j
j
st1 dse)s(X)s(X)t(x L

ISA, UVA 65
Ejemplo
[ ]sk
sekdtkedte)t(f)s(F)t(f
0
st
0
st
0
st =−====∞−∞
−∞
− ∫∫L
f(t) función salto
f(t) = 0 para t < 0
f(t) = k para t >= 0t
f(t)=k
Tablas de transformadas de las funciones mas comunes

ISA, UVA 66
Tabla de Transformadas

ISA, UVA 67
Tabla de transformadas

ISA, UVA 68
Propiedades de la T. Laplace[ ]
[ ]
[ ]
)s(G)s(Fd)t(g)(f
)s(sFlim)t(flim)s(Fe)dt(f
)0(fdt
)0(dfs)s(Fsdt
)t(fd)0(f)s(sFdt
)t(df
)s(bG)s(aF)t(bg)t(af
dte)t(f)s(F)t(f
0
0st
sd
22
2
0
st
=⎥⎦
⎤⎢⎣
⎡ττ−τ
==−
−−=⎥⎦
⎤⎢⎣
⎡−=⎥⎦
⎤⎢⎣⎡
+=+
==
∫
∫
∞
→∞→
−
∞−
L
L
LL
L
L
[ ] ∫∞
∞−
− ==j
j
st1 dse)s(F)s(F)t(f L
Transformada inversa

ISA, UVA 69
Propiedades I
[ ]
[ ] [ ] )s(bG)s(aFdte)t(gbdte)t(fadte)t(bg)t(af)t(bg)t(af
)s(bG)s(aF)t(bg)t(af
0
st
0
st
0
st +=+=+=+
+=+
∫∫∫∞
−∞
−∞
−L
L
[ ] )s(sF)0(fdtse)t(f)t(fedtedt
)t(dfdt
)t(df
dtsedu)t(fveudtdt
)t(dfdvduvuvdvu
dtedt
)t(dfdt
)t(df)0(f)s(sFdt
)t(df
0
st
00
stst
stst
0
st
+−=+==⎥⎦⎤
⎢⎣⎡
−==⇒==−=
=⎥⎦⎤
⎢⎣⎡−=⎥⎦
⎤⎢⎣⎡
∫∫
∫ ∫
∫
∞−
∞∞−−
−−
∞−
L
LL
[ ] ∫∞
−==0
stdte)t(f)s(F)t(fL

ISA, UVA 70
Propiedades
[ ]
)s(Fs1d)(f
d)(fsd)(fd)(fsdt
d)(fd
)s(F)t(fdt
d)(fd)t(f
dt
d)(fd
t
0
t
0
0
0
t
0
t
0
t
0
t
0
=⎥⎦⎤
⎢⎣⎡ ττ
⎥⎦⎤
⎢⎣⎡ ττ=ττ−⎥⎦
⎤⎢⎣⎡ ττ=
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ ττ
==⎥⎥
⎦
⎤
⎢⎢
⎣
⎡ ττ=
ττ
∫
∫∫∫∫
∫∫
L
LLL
LL

ISA, UVA 71
Propiedades II[ ]
[ ]
)s(Fede)(fedee)(fde)(fdte)dt(f
t;d0tdtdte)dt(f)dt(f
)s(Fe)dt(f
sd
0
ssd
0
ssd
d
)d(s
0
st
0
st
sd
−∞
τ−−∞
τ−−∞
−
+τ−∞
−
∞−
−
=ττ=ττ=ττ=−
∞=τ⇒∞=−=τ⇒=τ=−−=−
=−
∫∫∫∫
∫L
L
)(f)0(f)0(f)(f)0(f)t(f
)0(fdttd
)t(fd)0(fdtetd
)t(fdlim)s(sFlim
)0(fdtetd
)t(fd)s(sF)s(sFlim)t(flim
0
00
st
0s0s
0
st
0st
∞=+−∞=+=
=+=+=
+==
∞
∞∞−
→→
∞−
→∞→
∫∫
∫

ISA, UVA 72
Propiedades III
)s(G)s(Fde)(gde)(f
de)(gde)(fde)(gde)(f
dde)(g)(fdtde)t(g)(fdted)t(g)(f
t;0tt
dted)t(g)(fd)t(g)(f
)s(G)s(Fd)t(g)(f
0
s
0
s
s
0
ss
0
s
0
)(s
0 0
st
0
st
0
0
st
00
0
=αα⎥⎦
⎤⎢⎣
⎡ττ=
=αα⎥⎦
⎤⎢⎣
⎡ττ=αα⎥
⎦
⎤⎢⎣
⎡ττ=
=α⎥⎦
⎤⎢⎣
⎡τατ=⎥
⎦
⎤⎢⎣
⎡ττ−τ=⎥
⎦
⎤⎢⎣
⎡ττ−τ
∞=α⇒∞=τ−=α⇒=α=τ−
⎥⎦
⎤⎢⎣
⎡ττ−τ=⎥
⎦
⎤⎢⎣
⎡ττ−τ
=⎥⎦
⎤⎢⎣
⎡ττ−τ
∫∫
∫∫∫ ∫
∫ ∫∫ ∫∫ ∫
∫ ∫∫
∫
∞α−
∞τ−
∞
τ−
α−∞
τ−∞
τ−
α−∞
τ−
∞
τ−
∞τ+α−
∞ ∞−
∞−
∞
∞−
∞∞
∞
L
L

ISA, UVA 73
Resolución de LODES
( ) ( )
[ ]
tiomindosiomindotiomindo
......2s
11s2s
5.0sL)s(YL)t(y
2s1
1s2s5.0s)s(Y
2s1)s(U)s(U
1s2s5.0s)s(Y
)s(U5.0s1s2s)s(Y)s(U5.0)s(sU)s(Y)s(sY2)s(Ys
u5.0tdudLy
tdyd2
tdydL
0 tpara e)t(u;0td
)0(yd;0)0(yu5.0tdudy
tdyd2
tdyd
211
22
22
2
2
t22
2
⇒⇒
=⎥⎦⎤
⎢⎣⎡
+++−
==
+++−
=+
=++
−=
−=++−=++
⎥⎦
⎤⎢⎣
⎡−=⎥
⎦
⎤⎢⎣
⎡++
≥===−=++
−−
−
Ejemplo:

ISA, UVA 74
Descomposición en fracciones simples
[ ]( )
( ) ( )
( )( )
( ) ( )
( )ttt2
21
222
2
2
22
21
211
te5.1e5.2e5.21s5.1
1s5.2
2s5.2L)t(y
5.2bb25.5c2b2a5.00sa5.22sc5.11s
)2s(1s)2s(c
)2s()1s()2s)(1s(b
)2s(1s1sa
2s1
1s5.0s
1sc
1sb
2sa
2s1
1s5.0s
2s1
1s5.0sL
2s1
1s2s5.0sL)s(YL)t(y
−−−−
−−−
−+−=⎥⎦
⎤⎢⎣
⎡
+−
++
++
−=
=⇒+−=++=−⇒==−⇒−==−⇒−=
+++
+++++
+++
+=
++−
++
++
+=
++−
⎥⎦
⎤⎢⎣
⎡++
−=⎥⎦
⎤⎢⎣⎡
+++−
==

ISA, UVA 75
Función de Transferencia
∫ σσ−σ=t
0
d)t(u)(g)t(y
Tomando transformadas de Laplace:
[ ]
[ ] [ ] )s(U)s(Gu(t)g(t)
d)t(u)(gy(t))s(Yt
0
==
=⎥⎦
⎤⎢⎣
⎡σσ−σ== ∫
LL
LL
U(s)Y(s)G(s) )s(U)s(G)s(Y == s variable
compleja

ISA, UVA 76
Función de Transferencia
Cxy
BuAxtdxd
=
+= Tomando transformadas de Laplace, con condiciones iniciales nulas:
[ ]
[ ] [ ][ ] [ ])t(gBAsICG(s) )s(U)s(G)s(Y
)s(BUAsIC(s) Y)s(BUAsI)s(X
)s(CX)s(Y)s(BU)s(XAsI )s(BU)s(AX)s(sX
1
11
L=−==
−=−=
==−+=
−
−−

ISA, UVA 77
Función de Transferencia
G(s) es una función racional en la variable s
[ ] BAsICG(s) 1−−=
[ ]01
1n1n
nn
011m
1mm
m1
asa...sasabsb...sbsbBAsICG(s)
++++++++=−= −
−
−−−
Solo contiene operaciones racionales +-*/
)s(D)s(N
asa...sasabsb...sbsbG(s)01
1n1n
nn
011m
1mm
m =++++++++= −
−
−−

ISA, UVA 78
Representaciones matemáticas de modelos linealizados
)s(D)s(N
asa...sasabsb...sbsbG(s)01
1n1n
nn
011m
1mm
m =++++++++= −
−
−−
Cxy
BuAxtdxd
=
+=∫ σσ−σ=t
0
d)t(u)(g)t(yVariables de estado
Respuestaimpulsional
Función de transferencia

ISA, UVA 79
Matriz de Transferencia
En un proceso con varias entradas y salidas (MIMO) G(s) es una matriz de funciones de transferencia
[ ] BAsICG(s) 1−−= ⎥⎦
⎤⎢⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
)s(U)s(U
)s(G)s(G)s(G)s(G)s(G)s(G
)s(Y)s(Y)s(Y
2
1
3231
2221
1211
3
2
1
u1
u2
y1
y2
y3

ISA, UVA 80
Depósito. Modelo en FT
q
h
Fkh2
K k
h2A
qKhdt
hd
00 ==τ
Δ=Δ+Δτ
Tomando Transformadas de Laplace:
[ ]
( )
1sKG(s) G(s)Q(s)H(s) )s(Q
1sK)s(H
)s(KQ1s)s(H )s(KQ)s(H)s(sH
qKhdt
hd
+τ==
+τ=
=+τ=+τ
Δ=⎥⎦⎤
⎢⎣⎡ Δ+Δτ LL 1s
K+τ
Q(s) H(s)
ISA, UVA 81
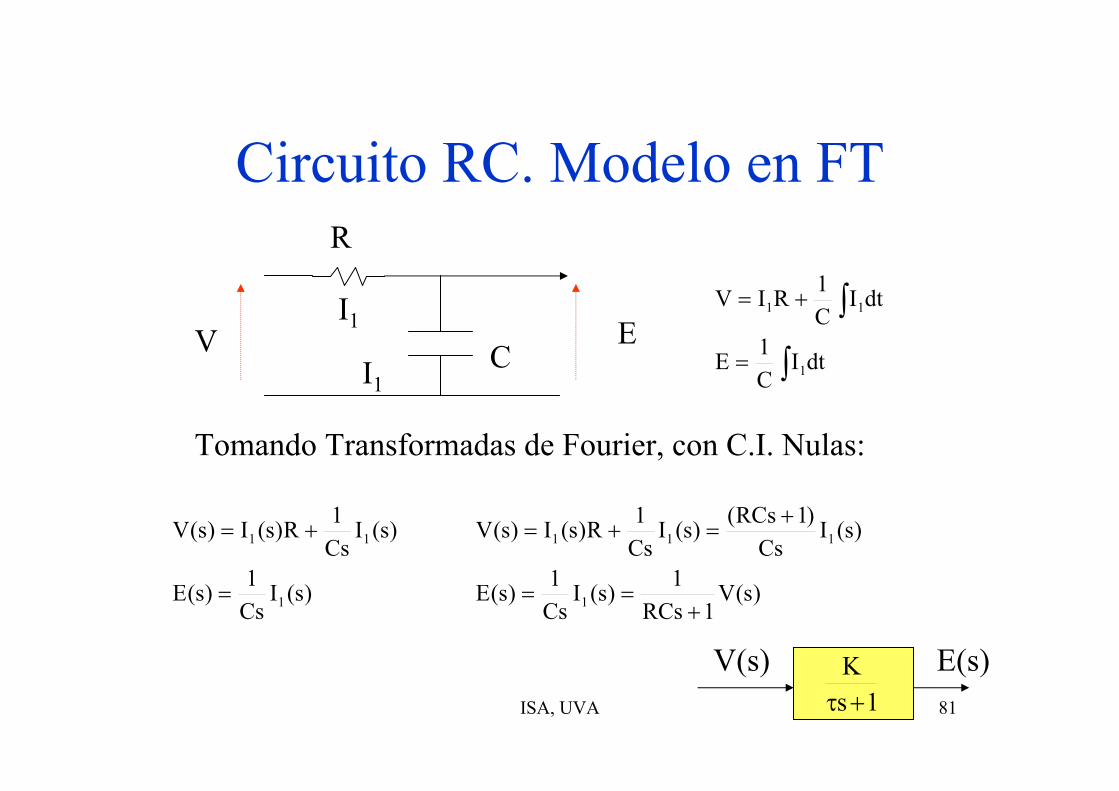
Circuito RC. Modelo en FTR
I1
CV EI1 ∫
∫
=
+=
dtIC1E
dtIC1RIV
1
11
)s(ICs1)s(E
)s(ICs1R)s(I)s(V
1
11
=
+=
)s(V1RCs
1)s(ICs1)s(E
)s(ICs
)1RCs()s(ICs1R)s(I)s(V
1
111
+==
+=+=
1sK+τ
V(s) E(s)
Tomando Transformadas de Fourier, con C.I. Nulas:

ISA, UVA 82
Flujo. Modelo en FTqa
Δp0
aK)p(Kqtdqd
201 Δ+ΔΔ=Δ+Δτ
Tomando transformadas de Laplace con c.i. nulas:
Q(s)1s
K1
+τ
1sK2
+τ
P(s)
A(s)[ ]
)s(A1s
K)s(P1s
K)s(Q
)s(AK)s(PK)1s)(s(Q)s(Q)s(sQ
aK)p(Kqtdqd
21
21
201
+τ+
+τ=
+=+τ=+τ
Δ+ΔΔ=⎥⎦
⎤⎢⎣
⎡Δ+Δτ LL
⎥⎦
⎤⎢⎣
⎡⎥⎦⎤
⎢⎣⎡
+τ+τ=
)s(A)s(P
1sK
1sK)s(Q 21

ISA, UVA 83
Temperatura. Modelo en FT
[ ]
)s(V1s
K)s(Q1s
K)s(T
)s(VK)s(QK)1s)(s(T)s(T)s(sT
VKqKTtdTd
21
21
21
+τ+
+τ=
+=+τ=+τ
Δ+Δ=⎥⎦
⎤⎢⎣
⎡Δ+Δτ LL
Tomando transformadas de Laplace con c.i. nulas:
T(s)1s
K1
+τ
1sK2
+τ
Q(s)
V(s)
q
V R T
Ti
VKqKTtdTd
21 Δ+Δ=Δ+Δτ

ISA, UVA 84
Reactor Isotermo. Modelo en FT
Fbcacatdcd
21B22A21B Δ+Δ+Δ=Δ
Ai1211A11A cbFbca
tdcd Δ+Δ+Δ=Δ
Tomando transformadas de Laplace con c.i. nulas:
A ⇒ B
F
CA CB
CAiA
[ ]
)s(Cas
b)s(Fas
b)s(C
)s(Cb)s(Fbas)s(C)s(Cb)s(Fb)s(Ca)s(sC
Ai11
12
11
11A
Ai121111A
Ai1211A11A
−+
−=
+=−++=
[ ]
)s(Fas
b)s(Cas
a)s(C
)s(Fb)s(Caas)s(C)s(Fb)s(Ca)s(Ca)s(sC
22
21A
22
21B
21A2122B
21B22A21B
−+
−=
+=−++=

ISA, UVA 85
Diagrama de bloques
A ⇒ B
F
CA CB
CAiA
)s(Cas
b)s(Fas
b)s(C Ai11
12
11
11A −
+−
=
)s(Fas
b)s(Cas
a)s(C22
21A
22
21B −
+−
=
CAi(s)
F(s)
CA(s) CB(s)11
11
asb−
22
21
asb−
11
12
asb− 22
21
asa−

ISA, UVA 86
Diagrama de bloques
( )( ) ( )( ) )s(Casas
ba)s(Fasas
abbasb
)s(Cas
bas
a)s(Fas
bas
bas
a
)s(Fas
b)s(Cas
b)s(Fas
bas
a)s(C
Ai1122
1221
1122
1121112121
Ai11
12
22
21
22
21
11
11
22
21
22
21Ai
11
12
11
11
22
21B
−−+
−−−+=
=−−
+⎥⎦
⎤⎢⎣
⎡−
+−−
=
=−
+⎥⎦
⎤⎢⎣
⎡−
+−−
=
CAi(s)
F(s) CB(s)( )( )1122
1221
asasba−−
( )( )1122
1121112121
asasabbasb
−−−+
ISA, UVA 87
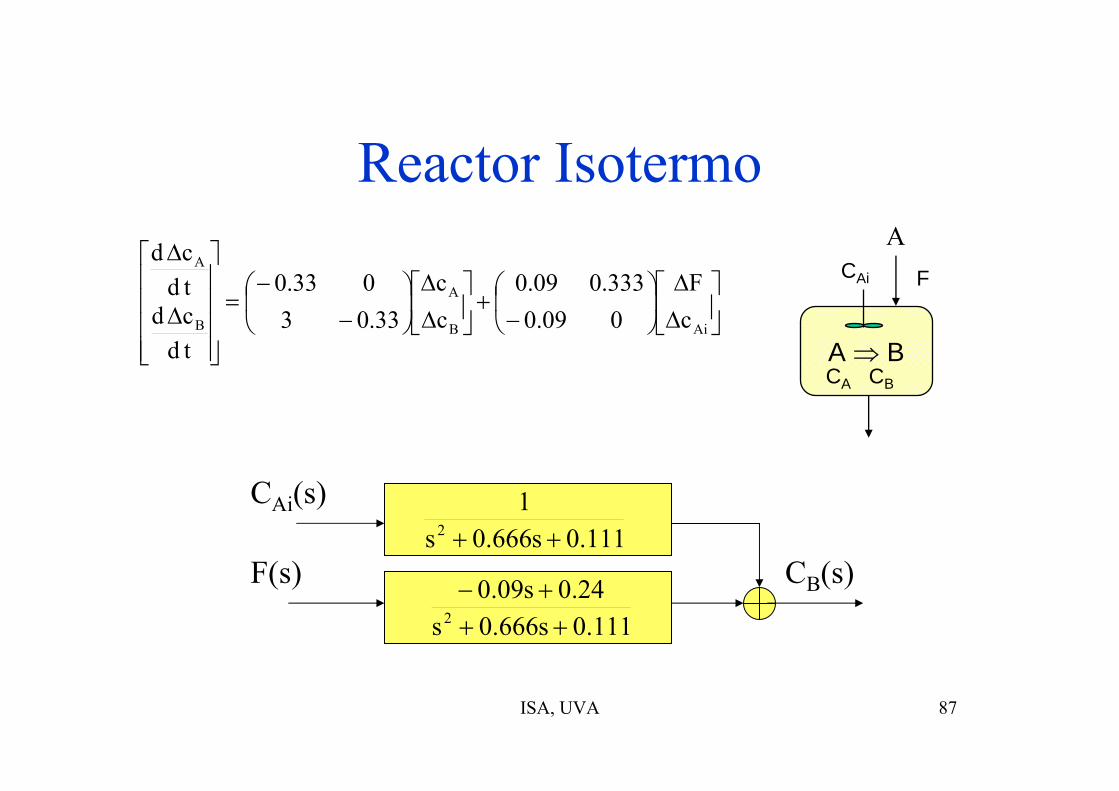
Reactor Isotermo
CAi(s)
F(s) CB(s)111.0s666.0s
12 ++
111.0s666.0s24.0s09.0
2 +++−
⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎠
⎞⎜⎝
⎛−
+⎥⎦
⎤⎢⎣
⎡ΔΔ
⎟⎠
⎞⎜⎝
⎛−
−=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
Δ
Δ
AiB
A
B
A
cF
009.0333.009.0
cc
33.03033.0
tdcdtdcd
A ⇒ B
F
CA CB
CAi
A

ISA, UVA 88
Bloques en serie
G1(s) G2(s)U(s) Y(s)X(s)
Y(s) = G2(s)X(s) = G2(s)G1(s)U(s) = G(s)U(s)
G (s) Y(s)U(s)
G(s) = G2(s)G1(s)
ISA, UVA 89
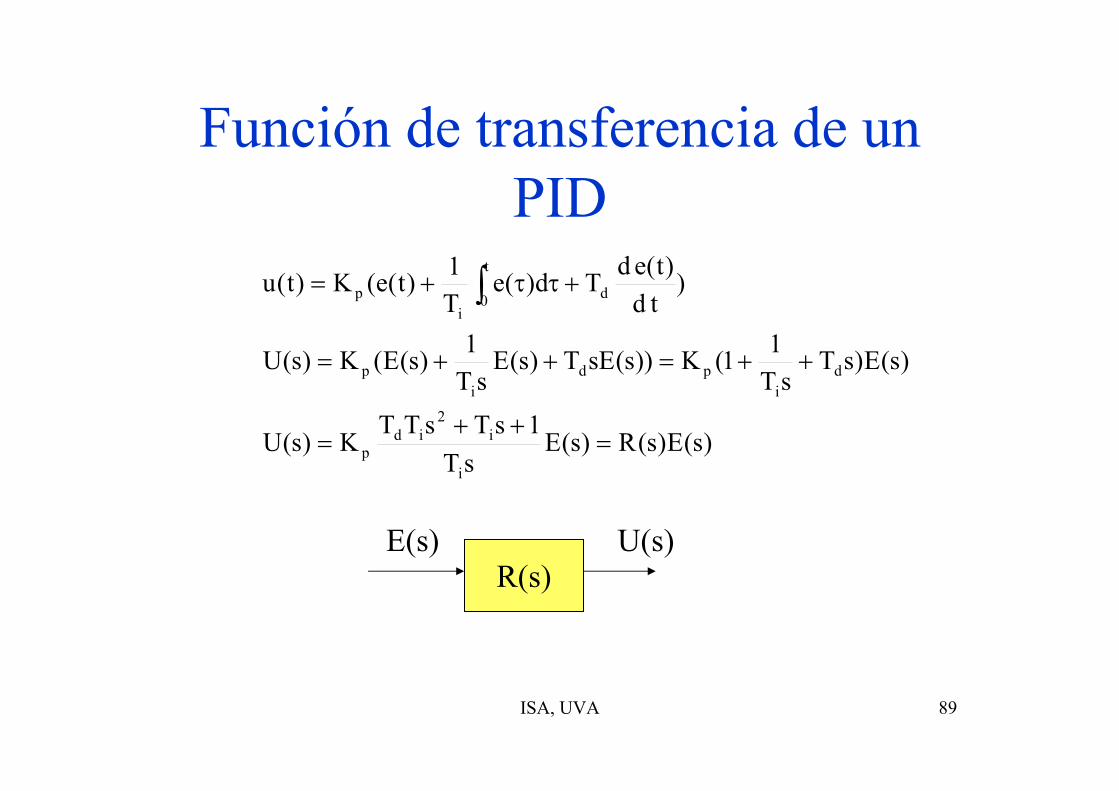
Función de transferencia de un PID
)s(E)s(R)s(EsT
1sTsTTK)s(U
)s(E)sTsT
11(K))s(sET)s(EsT
1)s(E(K)s(U
)td
)t(edTd)(eT1)t(e(K)t(u
i
i2
idp
di
pdi
p
d
t
0i
p
=++
=
++=++=
+ττ+= ∫
R(s)U(s)E(s)

ISA, UVA 90
Entradas Normalizadas
u y
t
u
tu t
u
t
u
impulso
salto
rampat=0
t=0
t=0
t=0
seno

ISA, UVA 91
Polos y ceros
)s(D)s(N
asa...sasabsb...sbsbG(s)01
1n1n
nn
011m
1mm
m =++++++++= −
−
−−
Ceros de G(s) = raíces de N(s) = 0
Polos de G(s) = raíces de D(s) = 0
0.382- ,618.2sen polos 01s3s3sen cero 03-s
)382.0s)(618.2s(3s
1s3s3sG(s)
2
2
−==++
==++
−=
++−
=

ISA, UVA 92
¿Por qué son importantes los polos(y los ceros)?
• Como se verá mas adelante, el tipo de respuesta temporal a una determinadaentrada depende de las posiciones de los polos (y ceros) del sistema.
• Igualmente la estabilidad está ligada a lasposiciones de los polos
ISA, UVA 93
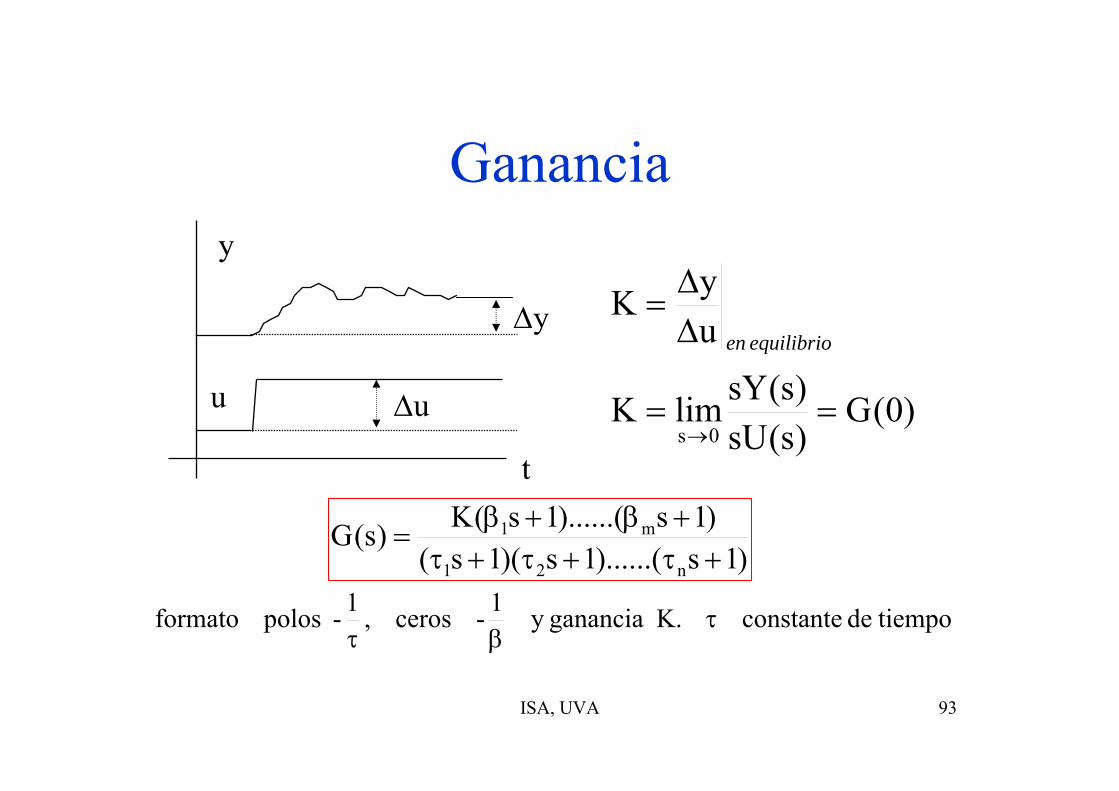
Ganancia
t
Δu
y
u
Δy
)0(G)s(sU)s(sYlimK
uyK
0s==
ΔΔ
=
→
equilibrio en
)1s)......(1s)(1s()1s)......(1s(K)s(G
n21
m1
+τ+τ+τ+β+β=
tiempode constante K. gananciay 1- ceros , 1- polos formato τβτ

ISA, UVA 94
Polos y Autovalores
[ ])s(D)s(NBAsICG(s) 1 =−= −
[ ] [ ][ ]BAsIdet
AsIadjCBAsICG(s) 1
−−=−= −
[ ] 0AsIdet =−
Autovalores de A = polos de G(s) (salvo cancelaciones polo/cero)
Polos: raices de D(s) = 0
Autovalores: raices de

ISA, UVA 95
Realizabilidad Física
q
h
1sK)s(G+τ
=
Sistema físico continuo
Existe
Dada una función de transferencia G(s)
¿Puede existir un sistema físico cuya función de transferencia sea G(s)?

ISA, UVA 96
Realizabilidad
Para que G(s) sea fisicamente realizable: m ≤ n
)s(D)s(N
asa...sasabsb...sbsbG(s)01
1n1n
nn
011m
1mm
m =++++++++= −
−
−−
En caso contrario:
⎥⎦⎤
⎢⎣⎡+
+=
⎟⎠⎞
⎜⎝⎛
++=
+++=
)s(U2s
1dt
)t(du)t(y
)s(U2s
1s)s(U2s
1s2s)s(Y2
1-L
Para una entrada en salto en u(t) tendría que dar una y(t) infinita

ISA, UVA 97
Un proceso con retardo (de transporte)
TTu
uq
(1-u)q
Tc
Tf
q , Te
L, vol
T
m
)t(TT)t(u)TT(dt
)t(TdqV
qvol
vALA
vL)t(Tcq)t(Tcq
dt)t(TcVd
T))t(u1(T)t(u)t(TTcq))t(u1(Tcq)t(u)t(Tcq
ffc
eeee
fcefeceee
−+τ−−=
===τρ−τ−ρ=ρ
−+=⇒ρ−+ρ=ρ
Suponiendo ρ, ce ctes.
u: señal en tanto por uno
ISA, UVA 98
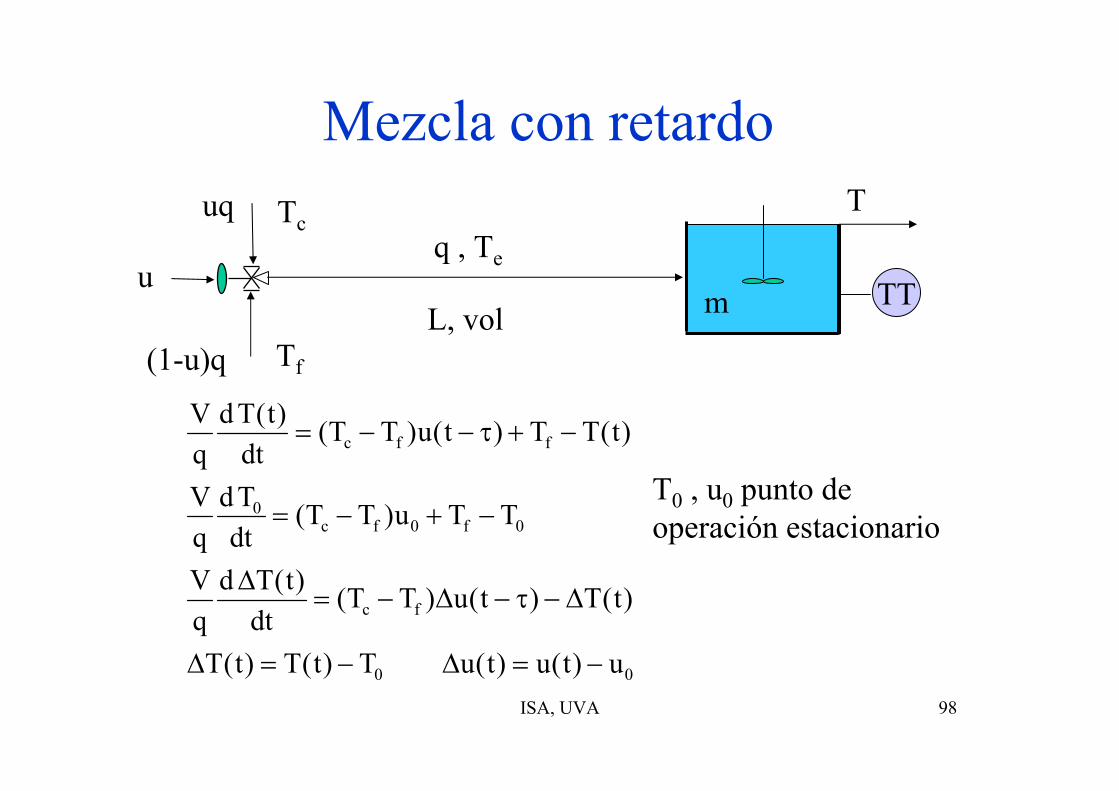
Mezcla con retardo
TTu
uq
(1-u)q
Tc
Tf
q , Te
L, vol
T
m
00
fc
0f0fc0
ffc
u)t(u)t(uT)t(T)t(T
)t(T)t(u)TT(dt
)t(TdqV
TTu)TT(dtTd
qV
)t(TT)t(u)TT(dt
)t(TdqV
−=Δ−=Δ
Δ−τ−Δ−=Δ
−+−=
−+τ−−=
T0 , u0 punto de operación estacionario

ISA, UVA 99
Mezcla con retardo
TTu
uq
(1-u)q
Tc
Tf
q , Te
L, vol
T
m
)t(Cx)t(y
)t(Bu)t(Axdt
)t(xd
)t(T.1)t(T)t(uV
)TT(q)t(TVq
dt)t(Td
)s(U1s
qV
)TT(e)s(T)t(u)TT()t(Tdt
)t(TdqV
fc
fcs
fc
=
τ−+=
Δ=Δτ−Δ−
+Δ−=Δ
+
−=⇒τ−Δ−=Δ+
Δ τ−
Modelo con retardo a la entrada

ISA, UVA 100
Retardo a la salida
TTu
uq
(1-u)q
Tc
Tf
q , TeL, volT
m
)t(Cx)t(y
)t(Bu)t(Axdt
)t(xd
)t(T.1)t(T)t(uV
)TT(q)t(TVq
dt)t(Td
)t(T)t(T)t(u)TT()t(Tdt
)t(TdqV
mfc
mfc
=τ+
+=
Δ=τ+ΔΔ−
+Δ−=Δ
Δ=τ+ΔΔ−=Δ+Δ
Modelo con retardo a la salida
Tm

ISA, UVA 101
Retardoq
V R T
Ti TT
)vLt(T)dt(T)t(Td −=−=
L
)s(V1s
Ke)s(Q1s
Ke)s(Te)s(T1
2ds
1
1ds
dsd +τ
++τ
==−−
−
)s(V1s
K)s(Q1s
K)s(T1
2
1
1
+τ+
+τ=
)1s)......(1s)(1s()1s)......(1s(Ke)s(G
n21
m1ds
+τ+τ+τ+β+β=
−
t
y
u
td
ISA, UVA 102
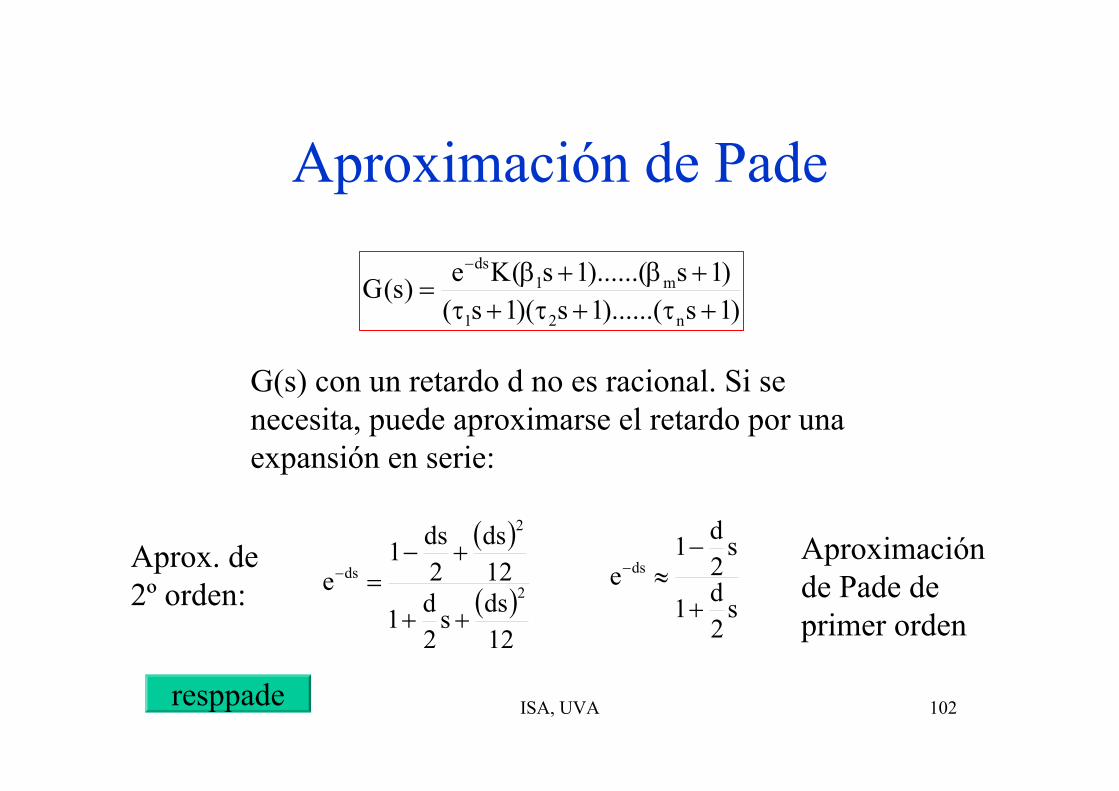
Aproximación de Pade
( )
( )12dss
2d1
12ds
2ds1
e 2
2
ds
++
+−=−
G(s) con un retardo d no es racional. Si se necesita, puede aproximarse el retardo por una expansión en serie:
)1s)......(1s)(1s()1s)......(1s(Ke)s(G
n21
m1ds
+τ+τ+τ+β+β=
−
s2d1
s2d1
e ds
+
−≈−
Aproximación de Pade de primer orden
Aprox. de 2º orden:
resppade

ISA, UVA 103
Control de procesos por computador
Proceso
Transmisor
u(t)
y(t)
4-20 mA
4-20 mA
Ordenador D/A
A/Dy(kT)
u(kT)w
Regulador digital
Actuador
Las señales que recibe y procesa el ordenador son de naturaleza distinta: digitales y solo cambian en ciertos instantes de tiempo

ISA, UVA 104
Señales
Procesou(t)
y(t)Ordenador D/A
A/Dy(kT)
u(kT)
wt
u(t)
t
y(kT)
t
y(t)
tT
La información en el ordenador se actualiza cada T unidades de tiempo (periodo de muestreo)

ISA, UVA 105
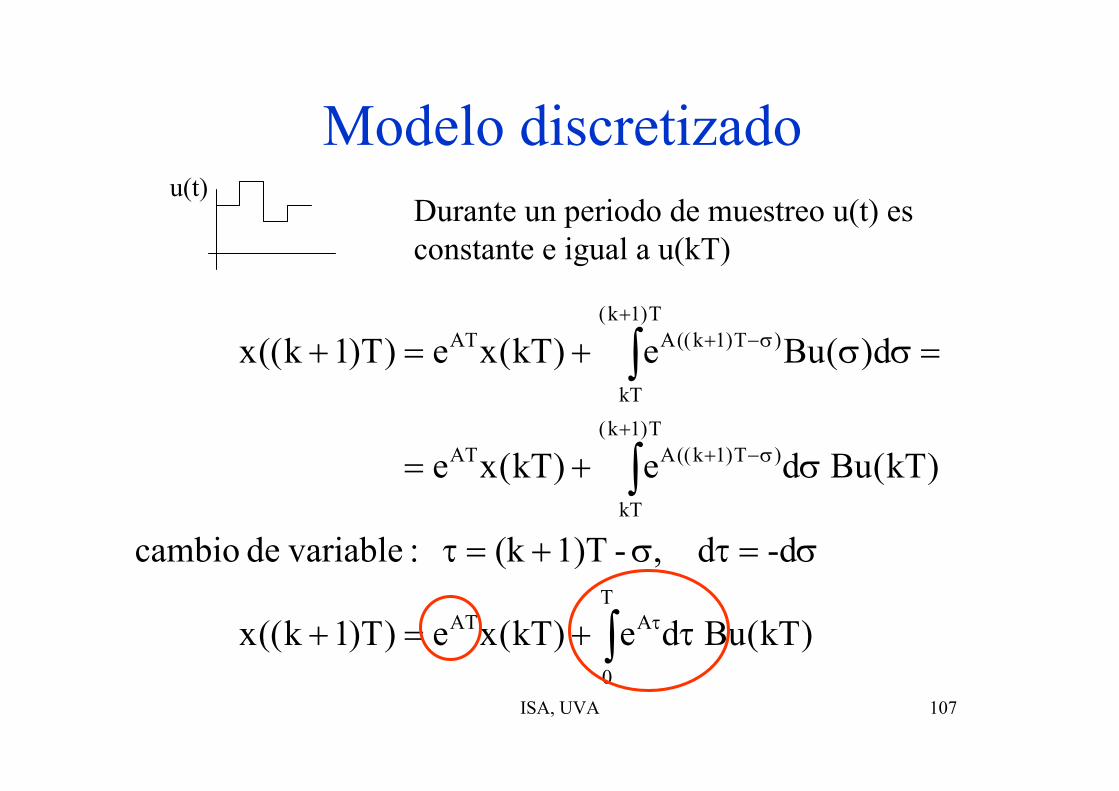
Modelo discretizado
u(t)
y(t)Ordenador D/A
A/Dy(kT)
u(kT)
wt
u(t)
t
u(kT)Cxy
BuAxtdxd
=
+=
Encontrar un modelo y(kT) = f( u(kT) ) tal que y(kT) = y(t) en los instantes de muestreo

ISA, UVA 106
Modelo discretizado
DuCxy
BuAxtdxd
+=
+=
Tomando como tiempos de inicio y final los instantes kT y (k+1)T de un periodo de muestreo:
∫+
σ−+ σσ+=+T)1k(
kT
)T)1k((AAT d)(Bue)kT(xe)T)1k((x
∫ ττ+= τ−−t
t
tAttA dBuetxetx0
0 )()()( )(0
)(
ISA, UVA 107
Modelo discretizado
)kT(Bude)kT(xe)T)1k((x
-dd ,-1)T(k : variablede cambio
)kT(Bude)kT(xe
d)(Bue)kT(xe)T)1k((x
T
0
AAT
T)1k(
kT
)T)1k((AAT
T)1k(
kT
)T)1k((AAT
∫
∫
∫
τ+=+
σ=τσ+=τ
σ+=
=σσ+=+
τ
+σ−+
+σ−+
u(t)Durante un periodo de muestreo u(t) es constante e igual a u(kT)

ISA, UVA 108
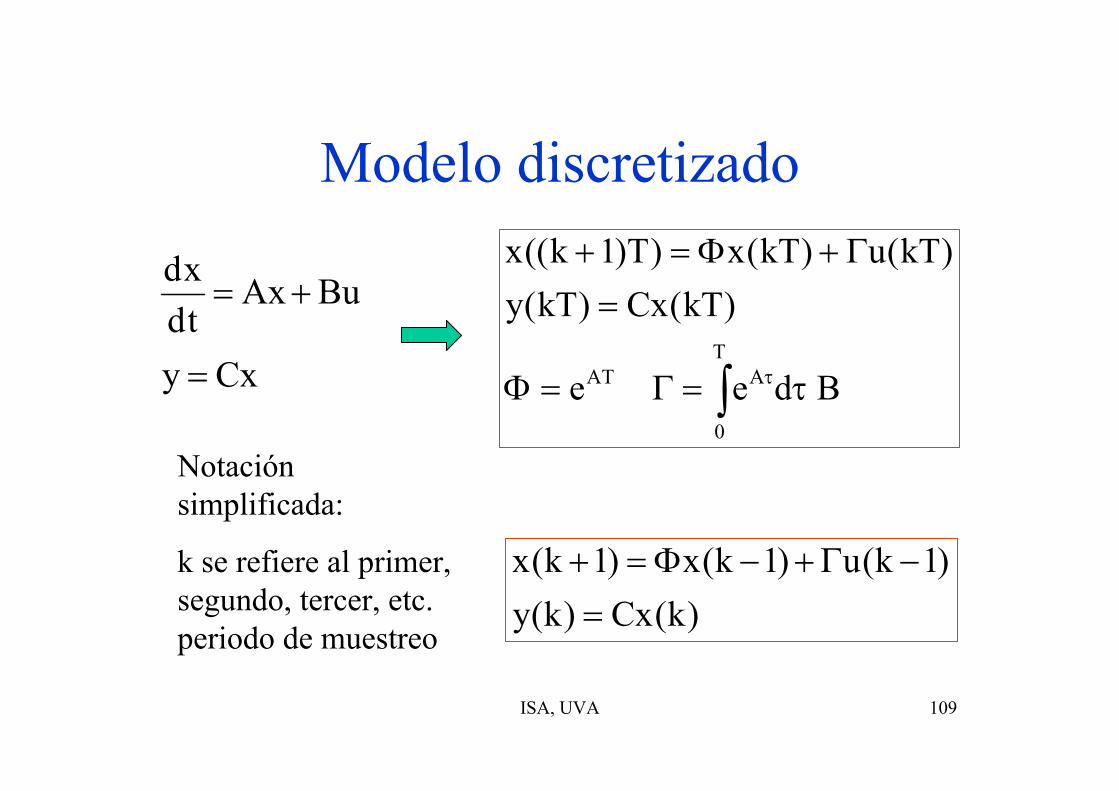
Modelo discretizado
Bdee
)kT(Cx)kT(y)kT(u)kT(x)T)1k((x
T
0
AAT ∫ τ=Γ=Φ
=Γ+Φ=+
τDuCxy
BuAxtdxd
+=
+=
u(t) Para este tipo de entradas, el modelo discretizado da los mismos valores en los instantes t = kT que el modelo continuo. (Partiendo del mismo estado inicial y aplicando las mismas entradas)
Ecuación en diferenciasMatlab c2d
y(t)
y(kT)
ISA, UVA 109
Modelo discretizado
Bdee
)kT(Cx)kT(y)kT(u)kT(x)T)1k((x
T
0
AAT ∫ τ=Γ=Φ
=Γ+Φ=+
τCxy
BuAxtdxd
=
+=
)k(Cx)k(y)1k(u)1k(x)1k(x
=−Γ+−Φ=+
Notación simplificada:
k se refiere al primer, segundo, tercer, etc. periodo de muestreo
ISA, UVA 110
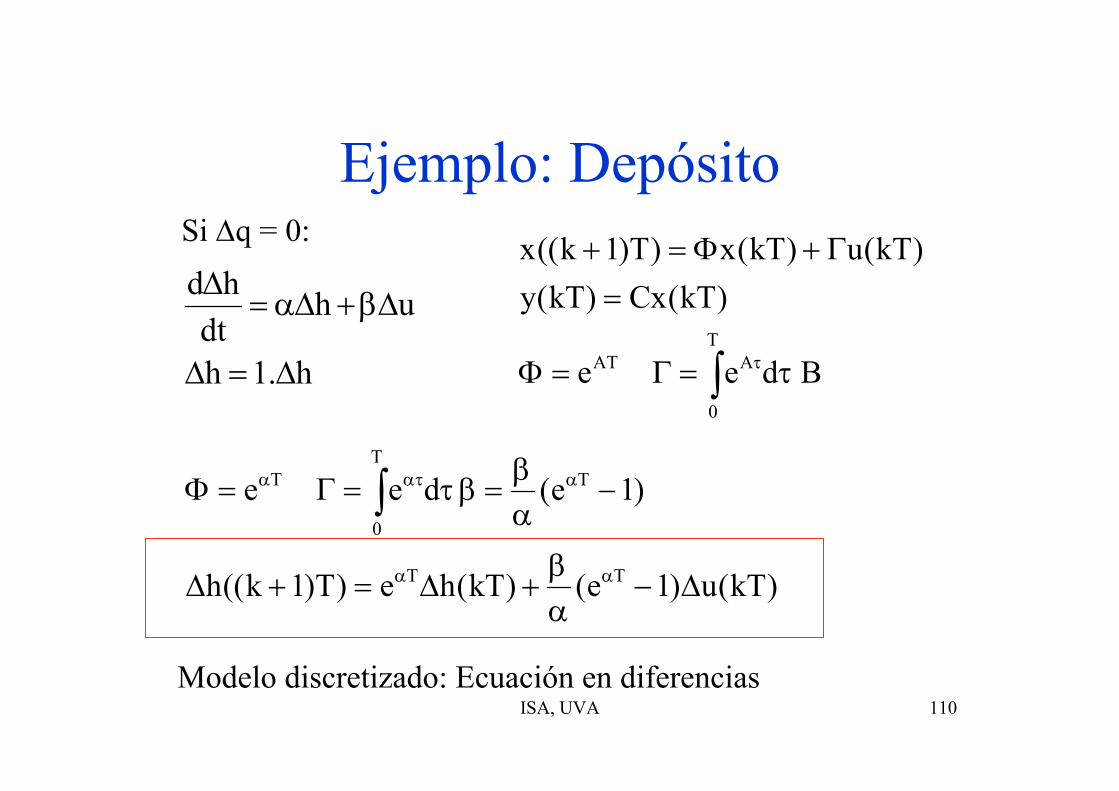
Ejemplo: Depósito
h.1h
uhdt
hd
Δ=Δ
Δβ+Δα=Δ
Bdee
)kT(Cx)kT(y)kT(u)kT(x)T)1k((x
T
0
AAT ∫ τ=Γ=Φ
=Γ+Φ=+
τ
)kT(u)1e()kT(he)T)1k((h
)1e(dee
TT
TT
0
T
Δ−αβ
+Δ=+Δ
−αβ
=βτ=Γ=Φ
αα
αατα ∫
Modelo discretizado: Ecuación en diferencias
Si Δq = 0:

ISA, UVA 111
Ejemplo: Depósito
h.1h
uhdt
hd
Δ=Δ
Δβ+Δα=Δ )kT(Cx)kT(y
)kT(u)kT(x)T)1k((x=
Γ+Φ=+
)kT(u)1e()kT(he)T)1k((h TT Δ−αβ
+Δ=+Δ αα
Modelo discretizado: Ecuación en diferencias
Si Δq = 0:
5.0T
167.0A
hk
252.1hA2ku
0
0
0
=
−=−
=β
−=−
=α
)5.0k(u062.0)5.0k(h535.0)5.0)1k((h Δ−Δ=+ΔSi

ISA, UVA 112
Respuesta temporal
)k(Cx)k(y)k(u)k(x)1k(x
=Γ+Φ=+ Condiciones iniciales: x(0)
[ ]
[ ]
∑∑−
=
−−−
=
−− ΓΦ+Φ=ΓΦ+Φ=
Γ+ΦΓ+ΓΦ+Φ=
=Γ+Γ+ΦΓ+ΦΦ=Γ+Φ=
Γ+ΦΓ+Φ=
=Γ+Γ+ΦΦ=Γ+Φ=Γ+Φ=
1k
0i
1ikk1k
0i
1ikk
23
2
2
)i(uC)0(xC)k(y)i(u)0(x)k(x
.......)2(u)1(u)0(u)0(x
)2(u)1(u)0(u)0(x)2(u)2(x)3(x)1(u)0(u)0(x
)1(u)0(u)0(x)1(u)1(x)2(x)0(u)0(x)1(x
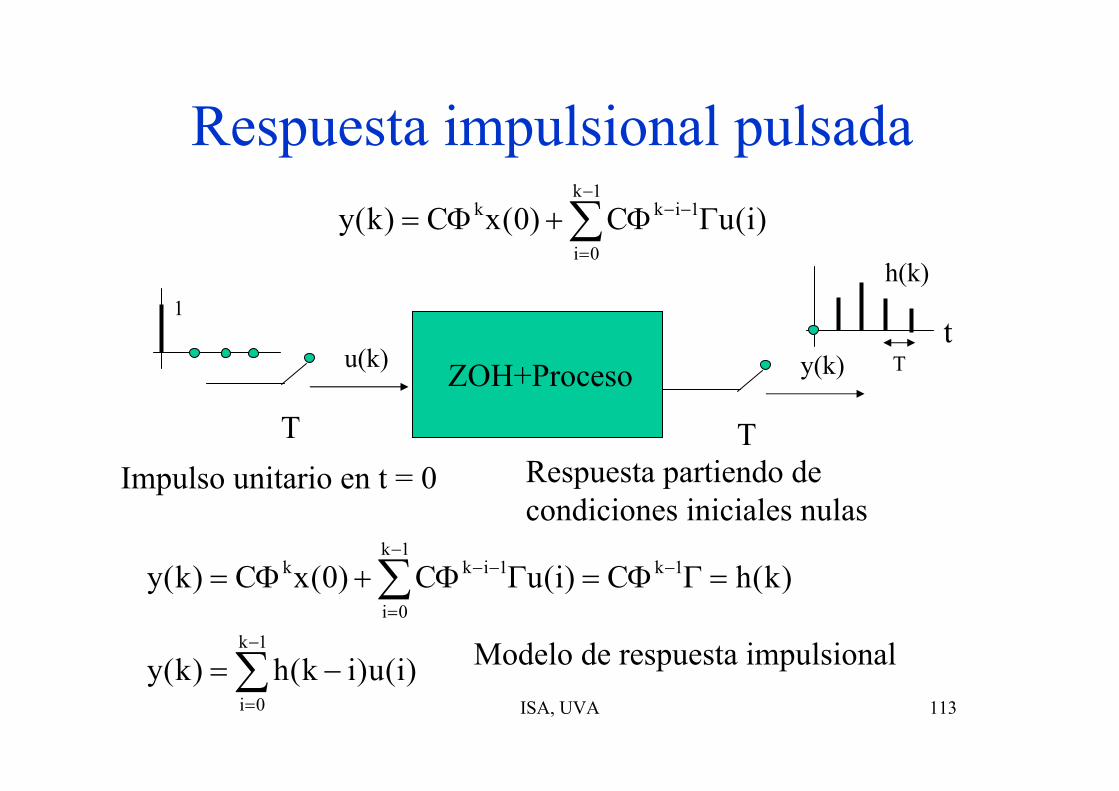
ISA, UVA 113
Respuesta impulsional pulsada∑−
=
−− ΓΦ+Φ=1k
0i
1ikk )i(uC)0(xC)k(y
T
u(k) ZOH+Proceso
T
y(k)t
T
Impulso unitario en t = 0
1
Respuesta partiendo de condiciones iniciales nulas
∑
∑−
=
−−
=
−−
−=
=ΓΦ=ΓΦ+Φ=
1k
0i
1k1k
0i
1ikk
)i(u)ik(h)k(y
)k(hC)i(uC)0(xC)k(y
h(k)
Modelo de respuesta impulsional

ISA, UVA 114
Modelo respuesta impulso
t
h(k)
∑
∑
=
−
=
−=
=−+−++−+=
=−=
k
1j
1k
0i
)jk(u)j(h
)1k(u)1(h)2k(u)2(h...)1(u)1k(h)0(u)k(h
)i(u)ik(h)k(y
Como h(i) = 0 para i ≤ 0 y para condiciones inociales nulas: u(i) = 0 para i < 0 :
∑∑∞
=
∞
=
−=−=1j0i
)jk(u)j(h)i(u)ik(h)k(y
La salida es una combinación lineal de valores pasados de la entrada

ISA, UVA 115
Ejemplo: Mezcla
TTu
uq
(1-u)q
Tc
Tf
q , Te
L, vol
T
m
)2k(u75.4)k(T905.0)1k(T
75.4)1060(204de905.0ee
min144)t(u
V)TT(q)t(T
Vq
dt)t(Td
5.0
0
2045.0
204
AT
fc
−+=+
=−τ=Γ===Φ
==ττ−Δ−
+Δ−=Δ
∫τ−−
Para q=4 l/min, V=10 l, Tc=60ºC, Tf=10ºC, vol=4 l, periodo = 0.5 min.
ISA, UVA 116
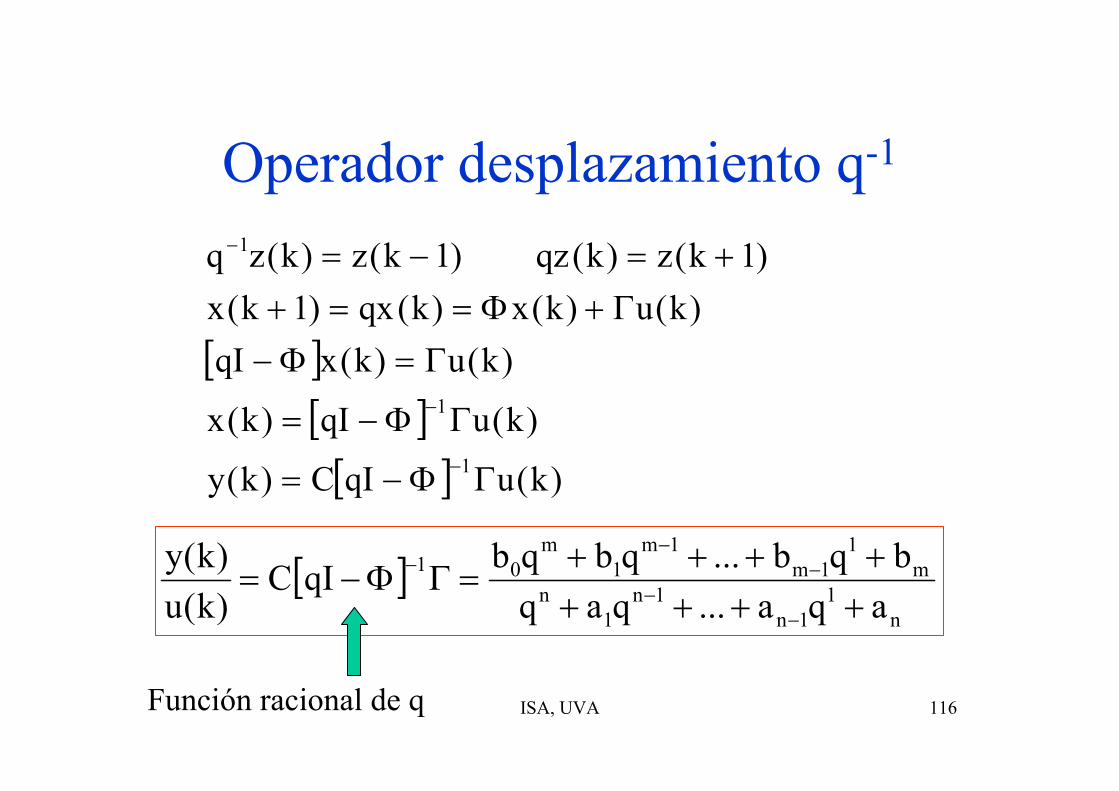
Operador desplazamiento q-1
[ ][ ][ ] )k(uqIC)k(y
)k(uqI)k(x
)k(u)k(xqI)k(u)k(x)k(qx)1k(x
)1k(z)k(qz)1k(z)k(zq
1
1
1
ΓΦ−=
ΓΦ−=
Γ=Φ−Γ+Φ==+
+=−=
−
−
−
[ ]n
11n
1n1
nm
11m
1m1
m01
aqa...qaqbqb...qbqbqIC
)k(u)k(y
++++++++
=ΓΦ−=−
−−
−−
Función racional de q

ISA, UVA 117
Función de transferencia pulsada[ ]
mnd
)k(uqaqa...qa1
)qbqb...qbb(q
)k(u]aqa...qaq[q
]bqb...qbqb[q
)k(uaqa...qaq
bqb...qbqb)k(uqIC)k(y
nn
1n1n
11
mm
1m1m
110
)mn(n
11n
1n1
nnm
11m
1m1
m0
nn
11n
1n1
nm
11m
1m1
m01
−=++++
++++=
=++++++++
=
=++++++++
=ΓΦ−=
−+−−
−
−+−−
−−−
−−−
−−−
−−
−−
−
)k(uqaqa...qa1
)qbqb...qbb(q)k(u)q(A)q(B)k(y n
n1n
1n1
1
mm
1m1m
110
d
1
1
−+−−
−
−+−−
−−
−
−
++++++++
==
ISA, UVA 118
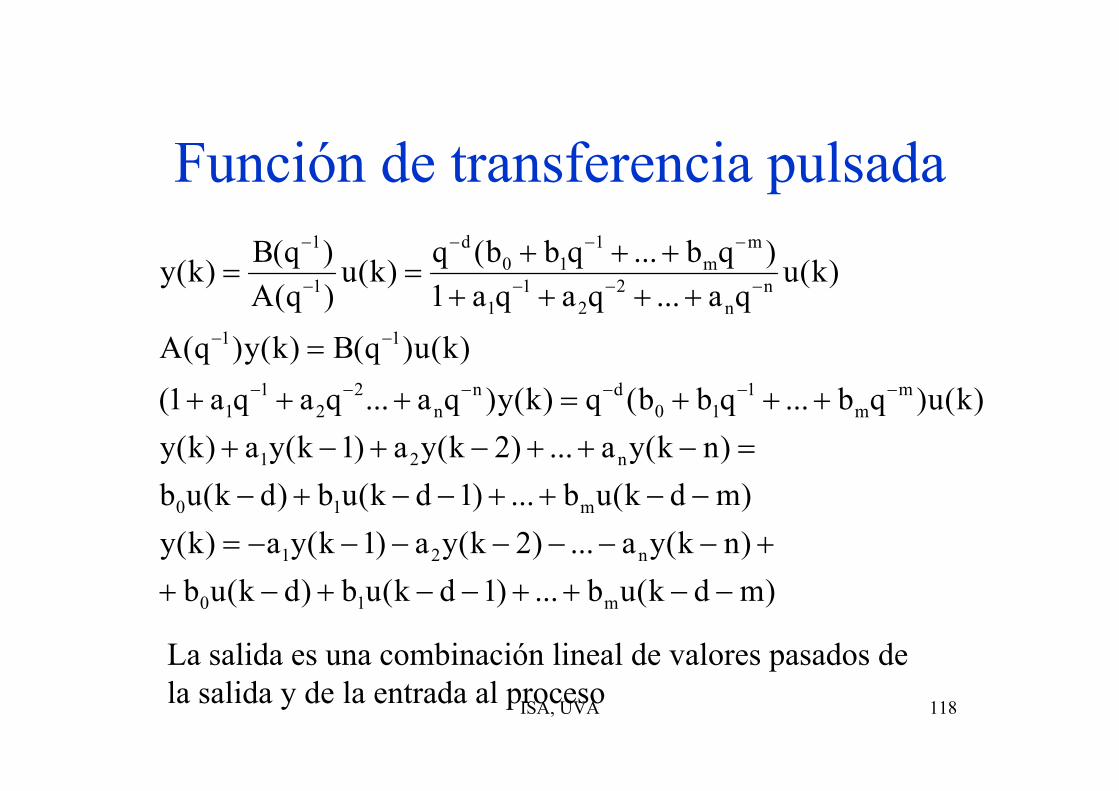
Función de transferencia pulsada
)mdk(ub...)1dk(ub)dk(ub)nk(ya...)2k(ya)1k(ya)k(y)mdk(ub...)1dk(ub)dk(ub
)nk(ya...)2k(ya)1k(ya)k(y)k(u)qb...qbb(q)k(y)qa...qaqa1(
)k(u)q(B)k(y)q(A
)k(uqa...qaqa1
)qb...qbb(q)k(u)q(A)q(B)k(y
m10
n21
m10
n21
mm
110
dnn
22
11
11
nn
22
11
mm
110
d
1
1
−−++−−+−++−−−−−−−=
−−++−−+−=−++−+−+
+++=+++
=
+++++++
==
−−−−−−
−−
−−−
−−−
−
−
La salida es una combinación lineal de valores pasados de la salida y de la entrada al proceso

ISA, UVA 119
Ejemplo: Depósitoq
h
F u
)5.0k(u062.0)5.0k(h535.0)5.0)1k((h Δ−Δ=+Δ
[ ]
[ ]
)k(uq535.01q062.0)k(u
535.0q062.0
)k(u)062.0(535.0q1
)k(uqIC)k(u)q(A)q(B)k(y
1
1
1
11
1
−
−
−
−−
−
−−
=−−
=
=−−=
=ΓΦ−==
T = 0.5
Polo = Autovalor = 0.535







