
Moriond27th March 2003
Progress in determining GClive Speake
University of Birmingham
• Importance of G in physics?
• Motivation
• BIPM/B�ham determination
• Recent developments

Moriond27th March 2003 Importance of G in physics?
• Why are we interested in the value of G?
Newton 1687 Einstein 1915
G is the UNIVERSAL constant of Gravitation
• Defines the dynamics of the Universe?Perhaps holds the key to Unification of forces. No Quantum theory of gravitation
122
12
2112 r̂
rMMGF −=
vµνµνµν
πTc
GgG4
8=Λ−

Moriond27th March 2003 Importance of G in physics?
• Original motivation was to determine the densities of planets (those with satellites).
Kepler
The Geocentric Gravitational constant is very accurately knownGME=398600.4415+/-0.0008 km3 s-2 (2ppb)
{ } 32 1)(
RmMG +=ω
• In dynamics we only find G in the product GM eg in binary pulsars; precession rate { } 3/2GM∝
• However masses of ZAMS 5/1
7
∝
GLM
• Chandrasekhar limit for White Dwarfs2/3
2
2
≈
pp Gm
cAZmM h
• G is calculable from other coupling constants and Unification scale; with gu
2=1/25 at 2.1016GeV, gives G=2.108!

Moriond27th March 2003 Motivation
•Our knowledge of gravity is weak!
dG/G = 0.15% , cf dα/α = 3.7 ppb (CODATA 1998)
•Inverse square law cf for electromagnetism 1/r2+ε, ε<3.10−16
Gravity
Moriond27th March 2003
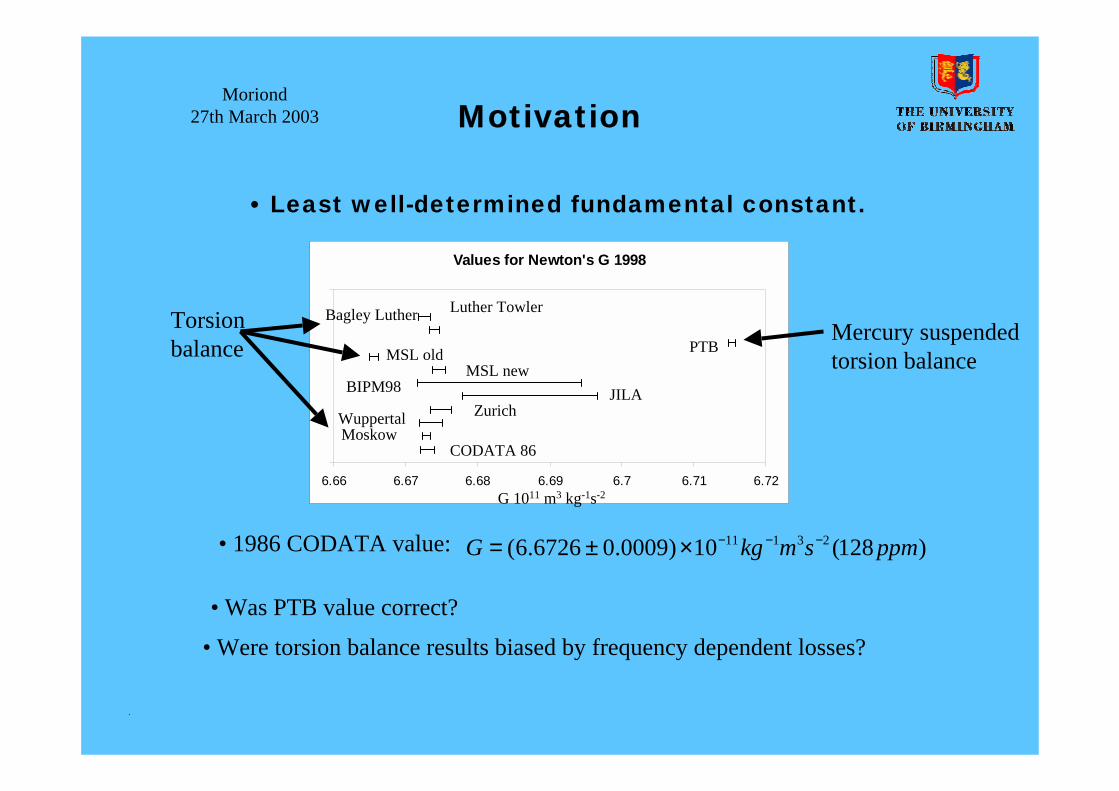
Values for Newton's G 1998
6.66 6.67 6.68 6.69 6.7 6.71 6.72
PTB
Wuppertal ZurichJILABIPM98
MSL new
CODATA 86
Luther Towler
MSL old
Moskow
Bagley Luther
G 1011 m3 kg-1s-2
• Least well-determined fundamental constant.
• Were torsion balance results biased by frequency dependent losses?
Torsion balance
• Was PTB value correct?
Mercury suspendedtorsion balance
Motivation
)128(10)0009.06726.6( 23111 ppmsmkgG −−−×±=• 1986 CODATA value:

Moriond27th March 2003
Frequency dependent fibre losses
Fractional change in spring constant
02468
101214
-6 -5 -4 -3 -2 -1 0 1 2
Log(frequency)
xQ
Maxwell unit:
+
∆+=ωτ
ωτj
jk
kK1
1
F
k
∆
∆.τ
• Extend to a distribution with
density of states ~1/τ
Real part of spring constant:
ττω
τωττ
τ
τdKreal ∫
∞
∞ +∆=
022
2
0 1)/ln(
Quinn et al 1992Kuroda 1995
• Leads to an overestimate of G

Moriond27th March 2003 Determination of G
T.J.Quinn, CCS, S.J.Richman, R.S.Davis and A. Picardco-workers and experiment at BIPM, France.
•Four-fold symmetry: low sensitivity to gravity gradients
•Torsion-Strip: 96% of restoring torque is gravitational. Relaxationtime 4 months. Torque is104 bigger than Luther 1981.
•Two quasi-independent methods:Electrostatic servo and Cavendishmethods.
•Experiment mounted on CMM.
T.J.Quinn, C.C.Speake, S.J.RichmanR.S.Davis and A.Picard. Phys Rev Lett 87, 111101, 2001

Moriond27th March 2003 Determination of G
12kg source massesCu -Te. Density gradient 200ppm across diameter
1.2kg test masses
AutocollimatorVacuum-canTorsion strip
Torsional stiffness:
Round section;
Rectangular section;2
.4R
LFk π=
21 4
2
RR
MgL
ππ
+
+
=12
112
433 tb
abMg
Lbt
LFk

Moriond27th March 2003 Determination of G
•Electrostatic torques applied tobalance G.
•Capacitance gradient hasmaximum versus angle (θ).
•Use capacitance bridge/autocollimatorto measure components of C(θ).
• Frequency dependent losses incapacitances could explain PTBresult. Use ac servo at frequency of Capacitance bridge.

Moriond27th March 2003
Plot of variation with angle of capacitance between one set of electrodes and torsion balance.

Moriond27th March 2003 Loss induced errors in
Capacitance calibration
( ) 121 )( −+>> CCRω ( )
+
+≡21
21CC
CCdd
ddC
ddC
θθθ
• Stray capacitance to lossyshields gives extra capacitance
C1
C2
RV C
• Determine C(θ) usingac bridge at 1kHz
• Use { }∑ −==Γ 2)(21
jiij VVCdd
ddU
θθ

Moriond27th March 2003 Loss induced errors in
Capacitance calibration
( )( )
++
+=Γ 221
22
21
222
2
12 CCRCR
ddC
ddCV
ωω
θθ
•Stray capacitance to shieldsgives extra frequency dependenttorque
C1
C2
R
( ) 121 )( −+<< CCRω θd
dCV2
2
→Γ
• Calibration includes variation of C2: Overestimate of G• Possible explanation of PTB result?• Calibrate and apply torques at same frequency.
• Apply torques with lowfrequency voltage
V C

Moriond27th March 2003 Determination of G
Uncertainty Source pts in 105
(a) Servo-method:
test mass value 0.25
source mass value 0.25
test and source mass coordinates 3.2
angle calibration 2
calibration of electrical instruments 4
mean of torque measurements (n=25) 2.3
Sub-total 6.0
(b) Cavendish method
test mass value 0
source mass value 0.25
test and source mass coordinates 2.4
timing 3.5
angle calibration 4
anelasticity 0.4
source-mass density inhomogeneity 0.6
mean of deflection measurements (n=38) 3.2
Sub-total 6.7
A ve rage o f (a) and (b),
tak ing account o f corre lations
mass values 0.3
test and source mass coordinates 2.2
source-mass density inhomogene ity 0.3
anelastic ity 0.2
capacitance calibration 2
angle calibrat ion 1
tim ing 1.75
means of torque and deflection 2.0
C ombine d unce rtainty 4 .1

Moriond27th March 2003 Determination of G
Final value:G = 6.67559(27) × 10-11 m3 kg-1 s-2 (41ppm)
• Cavendish Method: G = 6.67565 × 10-11 m3 kg-1 s-2 (67ppm)
• Servo method: G = 6.67553 × 10-11 m3 kg-1 s-2 (61ppm)
• Cross-correlation in uncertainty budgets -18%
CODATA 1999: )1500(10)010.0673.6( 23111 ppmsmkgG −−−×±=

Moriond27th March 2003
Mk3 Torsion strip balance at BIPM 26 March 2003

Moriond27th March 2003
Torsion-strip gimbal and simple pendulum damper.

Moriond27th March 2003
Richard Davis, Terry Quinn (his optics), Harold Parkes

Moriond27th March 2003
Recent Developments
Values of Newton's Constant of Gravitation 2003.
CODATA 1986Bagley Luther
MoskowHUST
CODATA 99
WuppertalMSL
BIPMSeattle
Zurich
6.66 6.67 6.68 6.69
G. 1011 m3 kg-1 s-2
Measurements in progress: BIPM, HUST, Irvine, JILA, MSL.

Moriond27th March 2003



![Ham [Read-Only] Ham Beetles, Cheese Skippers, Ham Mites](https://cdn.vdocuments.site/doc/165x107/5abdea347f8b9a7e418c3fd3/ham-read-only-ham-beetles-cheese-skippers-ham-mites.jpg)



