Download - Geodesic Equation
Geodesic Equation & Hamiltonian Dynamics
Hang Shao
Introduction
• Recall Lagrangian Mechanics
• Geodesic Equations
• Hamiltonian Mechanics (Dynamics)
• Applications
Lagrangian Mechanics
• Lagrangian : short for
where
• kinetic minus the potential energy
L(qi, qi, t) L(q1, · · · , qn, q1, · · · , qn, t)
qi = dqi/dt
Lagrangian Mechanics
• Variation of Lagrangian , which is
similar with total differential of
• Then integrate the variation with respect to time and make it to 0,
which can be summarized by Hamilton’s principle
L(qi, qi, t)
�L =NX
i=1
(@L
@qi�qi +
@L
@qi�qi)
Z b
a�L = 0
Lagrangian Mechanics
• Integrating by parts and boundary condition
• Euler–Lagrange equation
d
dt
@L
@qi� @L
@qi= 0
Z b
a�L
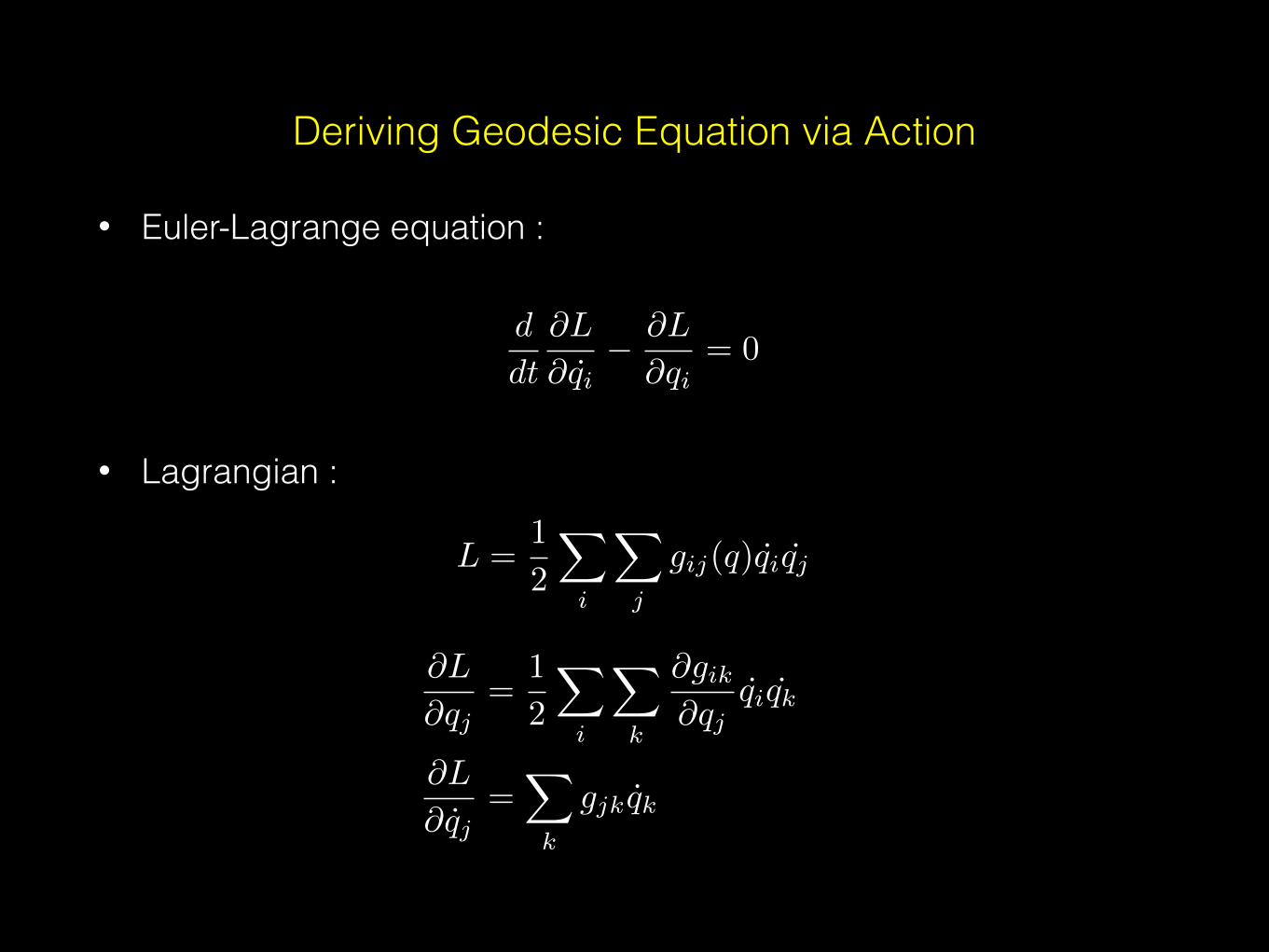
Deriving Geodesic Equation via Action
• Euler-Lagrange equation :
• Lagrangian :
d
dt
@L
@qi� @L
@qi= 0
@L
@qj=
1
2
X
i
X
k
@gik@qj
qiqk
@L
@qj=
X
k
gjk qk
L =1
2
X
i
X
j
gij(q)qiqj
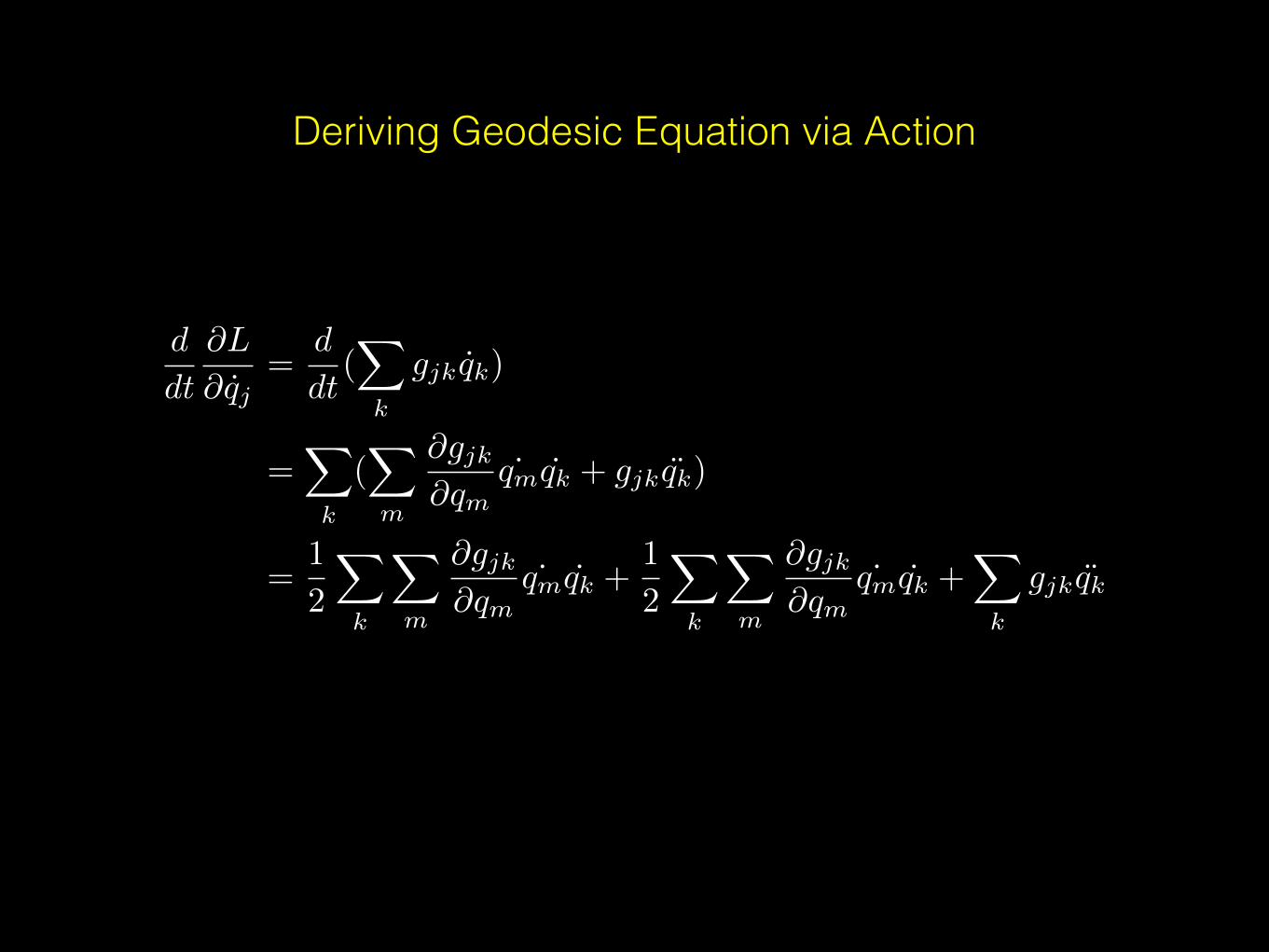
Deriving Geodesic Equation via Action
d
dt
@L
@qj=
d
dt(X
k
gjk qk)
=X
k
(X
m
@gjk@qm
˙qmqk + gjk qk)
=1
2
X
k
X
m
@gjk@qm
˙qmqk +1
2
X
k
X
m
@gjk@qm
˙qmqk +X
k
gjk qk
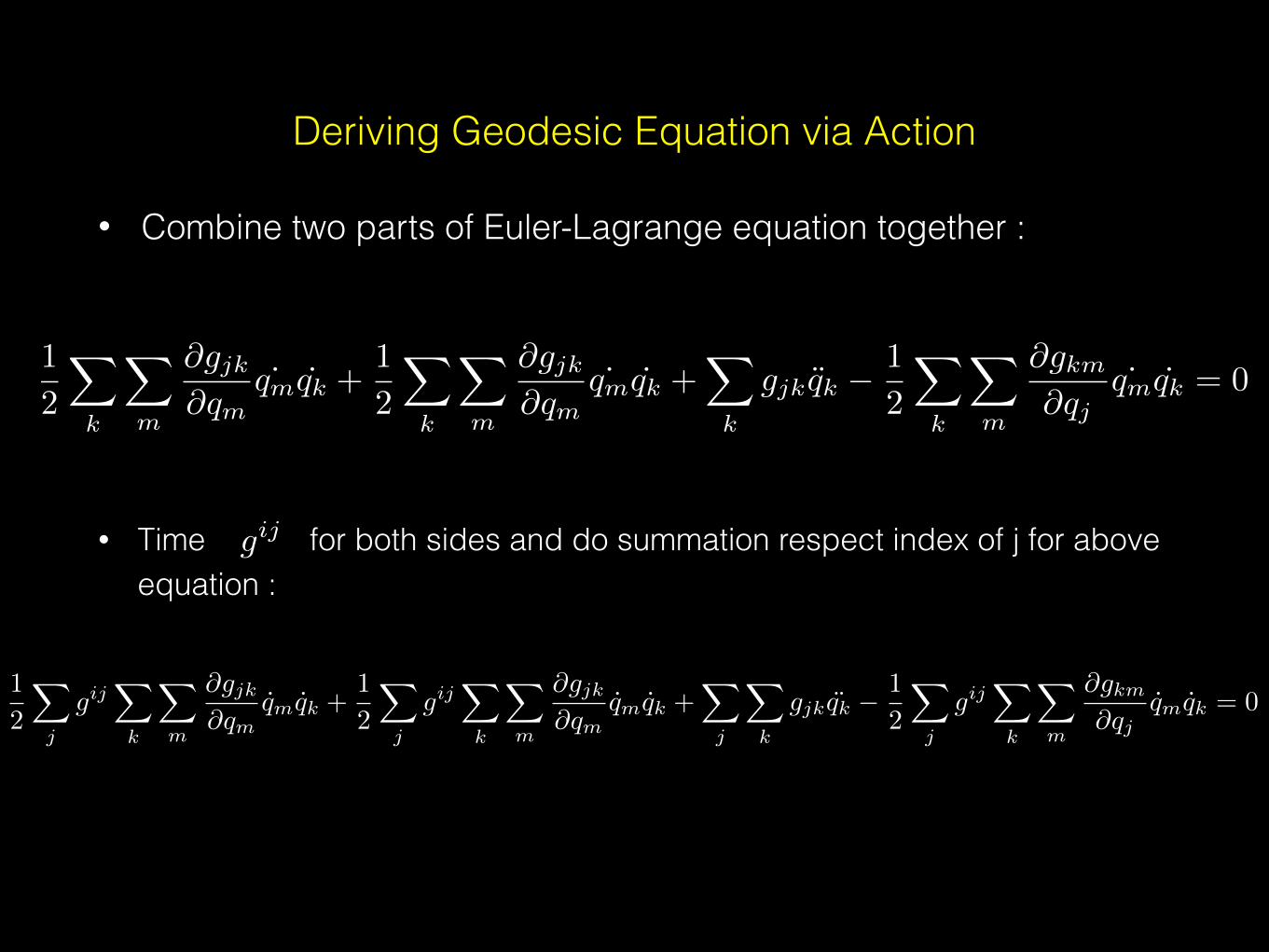
Deriving Geodesic Equation via Action
• Combine two parts of Euler-Lagrange equation together :
• Time for both sides and do summation respect index of j for above equation :
1
2
X
k
X
m
@gjk@qm
˙qmqk +1
2
X
k
X
m
@gjk@qm
˙qmqk +X
k
gjk qk � 1
2
X
k
X
m
@gkm@qj
˙qmqk = 0
gij
1
2
X
j
gijX
k
X
m
@gjk@qm
qmqk +1
2
X
j
gijX
k
X
m
@gjk@qm
qmqk +X
j
X
k
gjk qk � 1
2
X
j
gijX
k
X
m
@gkm@qj
qmqk = 0
Deriving Geodesic Equation via Action
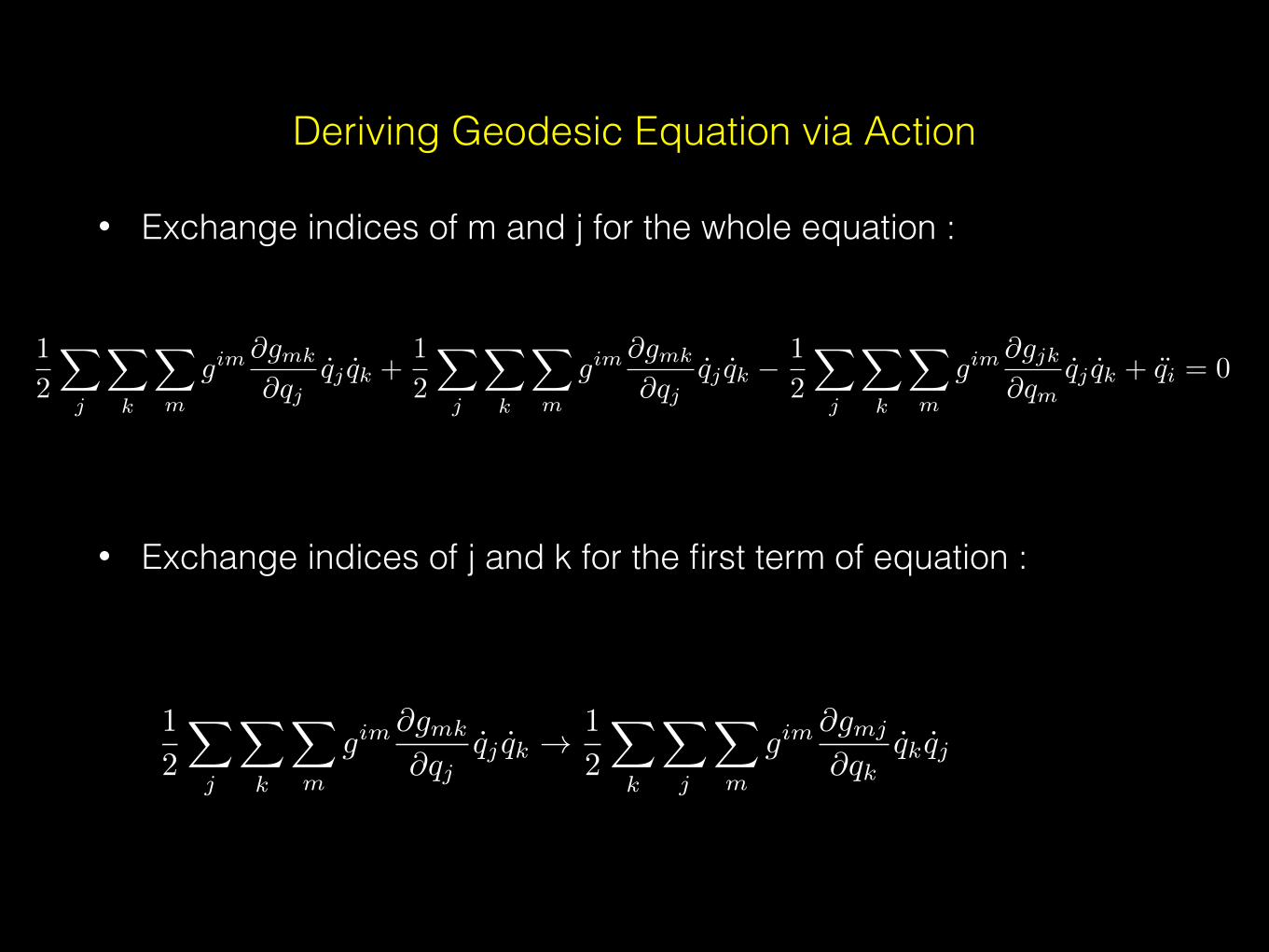
• Exchange indices of m and j for the whole equation :
• Exchange indices of j and k for the first term of equation :
1
2
X
j
X
k
X
m
gim@gmk
@qjqj qk +
1
2
X
j
X
k
X
m
gim@gmk
@qjqj qk � 1
2
X
j
X
k
X
m
gim@gjk@qm
qj qk + qi = 0
1
2
X
j
X
k
X
m
gim@gmk
@qjqj qk ! 1
2
X
k
X
j
X
m
gim@gmj
@qkqk qj
Deriving Geodesic Equation via Action
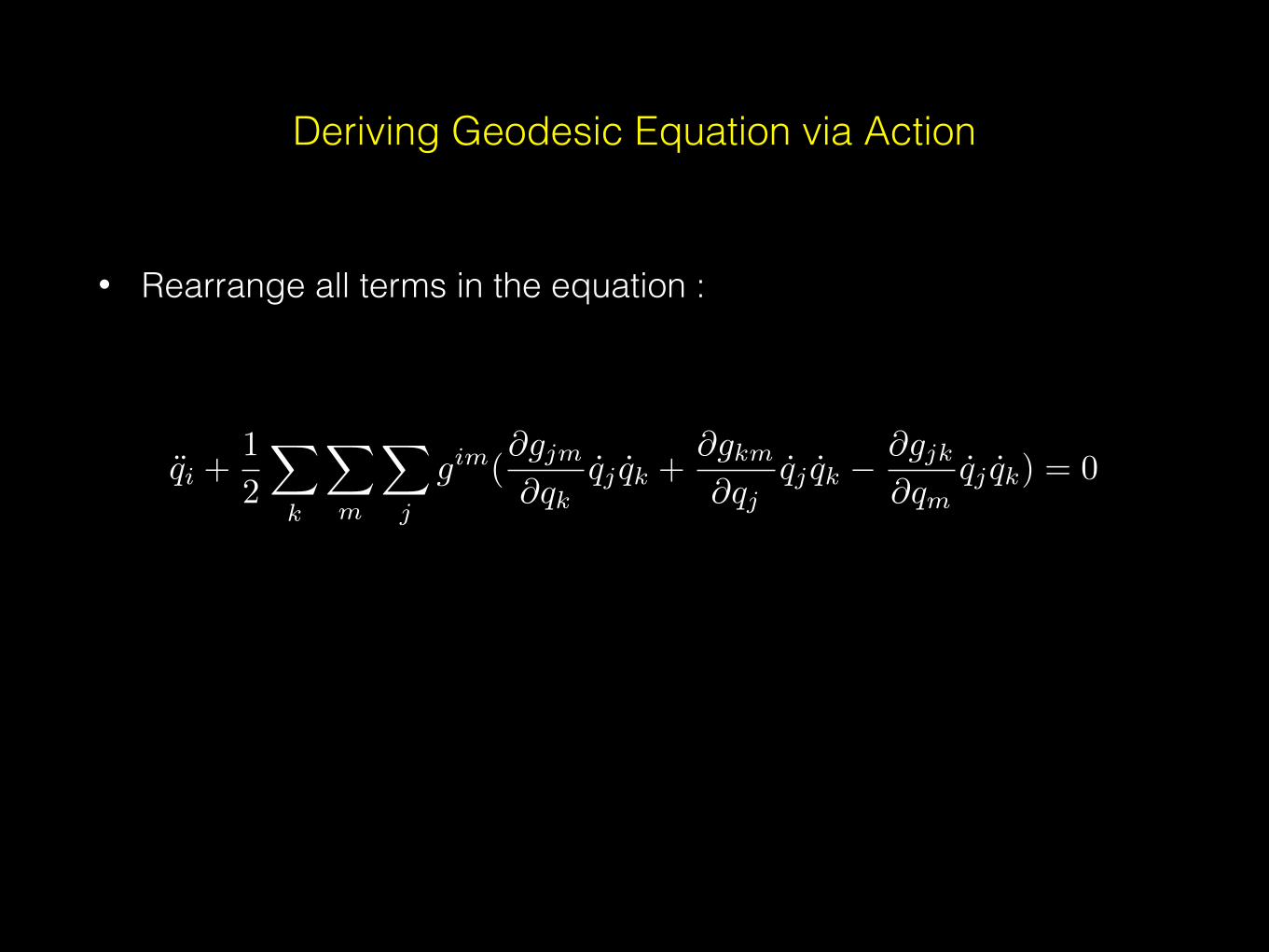
• Rearrange all terms in the equation :
qi +1
2
X
k
X
m
X
j
gim(@gjm@qk
qj qk +@gkm@qj
qj qk � @gjk@qm
qj qk) = 0
Deriving Geodesic Equation via Action
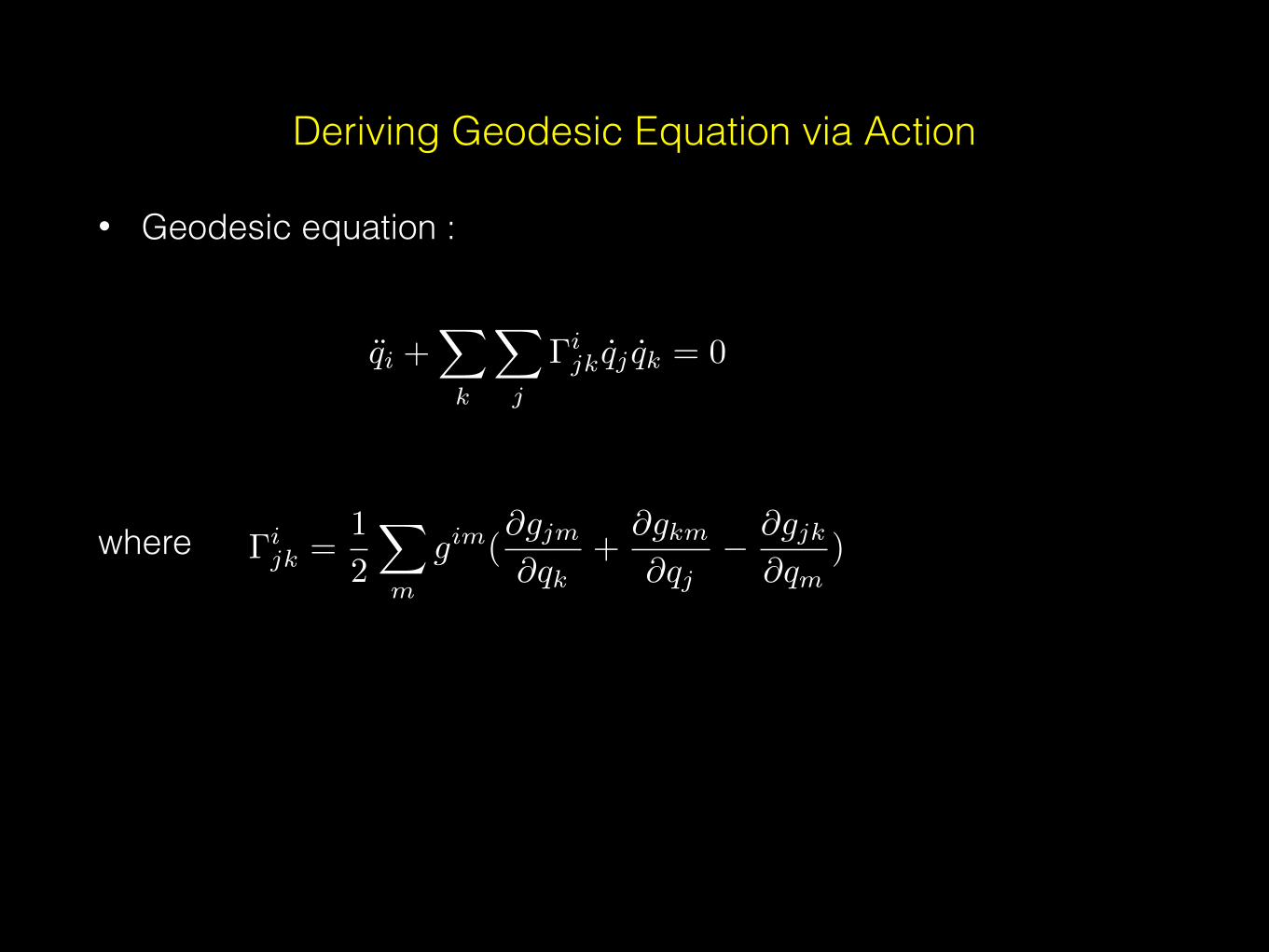
• Geodesic equation :
where �ijk =
1
2
X
m
gim(@gjm@qk
+@gkm@qj
� @gjk@qm
)
qi +X
k
X
j
�ijk qj qk = 0
Geodesic Equation

Geodesic Equation
(cos ✓ cos�, sin ✓ cos�, sin�)
e✓ = (� sin ✓ cos�, cos ✓ cos�, 0)
e� = (� cos ✓ sin�,� sin ✓ sin�, cos�)
g =
✓he✓, e✓i he✓, e�ihe�, e✓i he�, e�i
◆
=
✓(cos�)2 0
0 1
◆
• SO(3) ( ) coordinate chart : S2
• Unit tangent vectors:
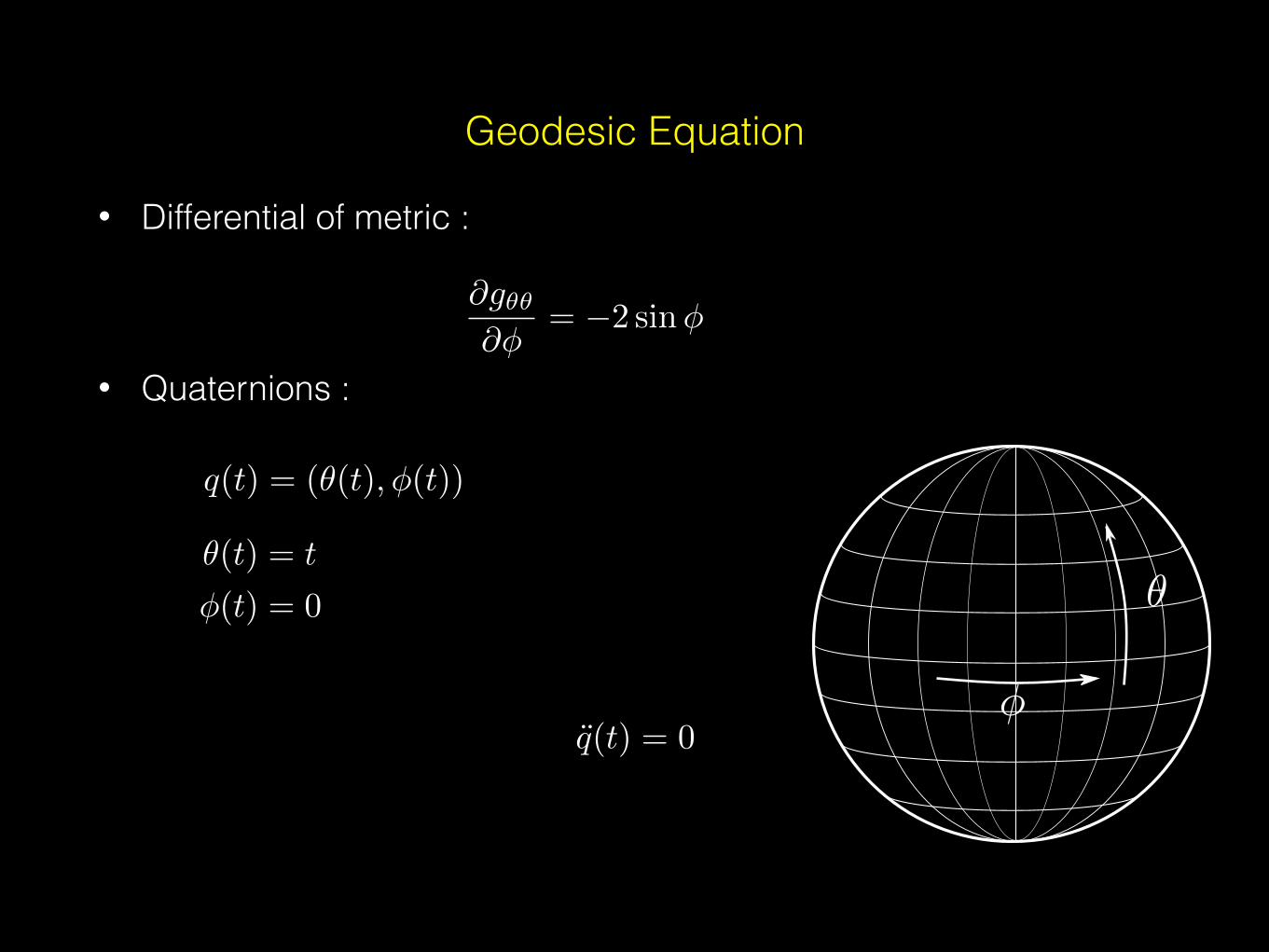
Geodesic Equation
q(t) = (✓(t),�(t))
✓(t) = t
�(t) = 0
q(t) = 0
• Differential of metric :
• Quaternions :
@g✓✓@�
= �2 sin�
Hamiltonian Mechanics
• Conjugate momenta :
• Total differential of Lagrangian :
(qi, qi) 7! (qi, pi)pi =@L
@qi
dL =NX
i=1
@L
@qidqi +
NX
i=1
@L
@qidqi
=NX
i=1
pidqi +NX
i=1
pidqi
Hamiltonian Mechanics
• Set velocities to momenta via a Legendre transformation
• Define “Hamiltonian” as
dH = �NX
i=1
pidqi +NX
i=1
qidpi
dL =NX
i=1
pidqi + d(p · q)�NX
i=1
qidpi
d(p · q � L) = �NX
i=1
pidqi +NX
i=1
qidpi
H = p · q � L
Hamiltonian Mechanics
• Hamiltonian equations :
dqidt
=@H
@pidpidt
= �@H
@qi
Hamiltonian Mechanics
• Assumed kinetic energy is T =< q, q >=NX
i,j=1
cij qiqj
@T
@qj= 2
NX
i=1
cij qi
H =NX
i=1
pi@L
@qi� L
=NX
i=1
pi@T
@qi� L
= 2T � L
= T + U
Geodesic Equations
• Lagrangian and Hamiltonian
• Metrics and inverse of it
• Hamiltonian Equation
gijgjk = �ik
dqidt
= gijpi
dpidt
= �1
2
@gjk
@qipjpk
L =1
2
X
i
X
j
gij(q)qiqj
H =1
2
X
i
X
j
gij(q)pipj
Applications of Hamiltonian
• Geodesic Flow
• Image Registration
• Hamiltonian Monte Carlo Sampling( HMC Sampling)
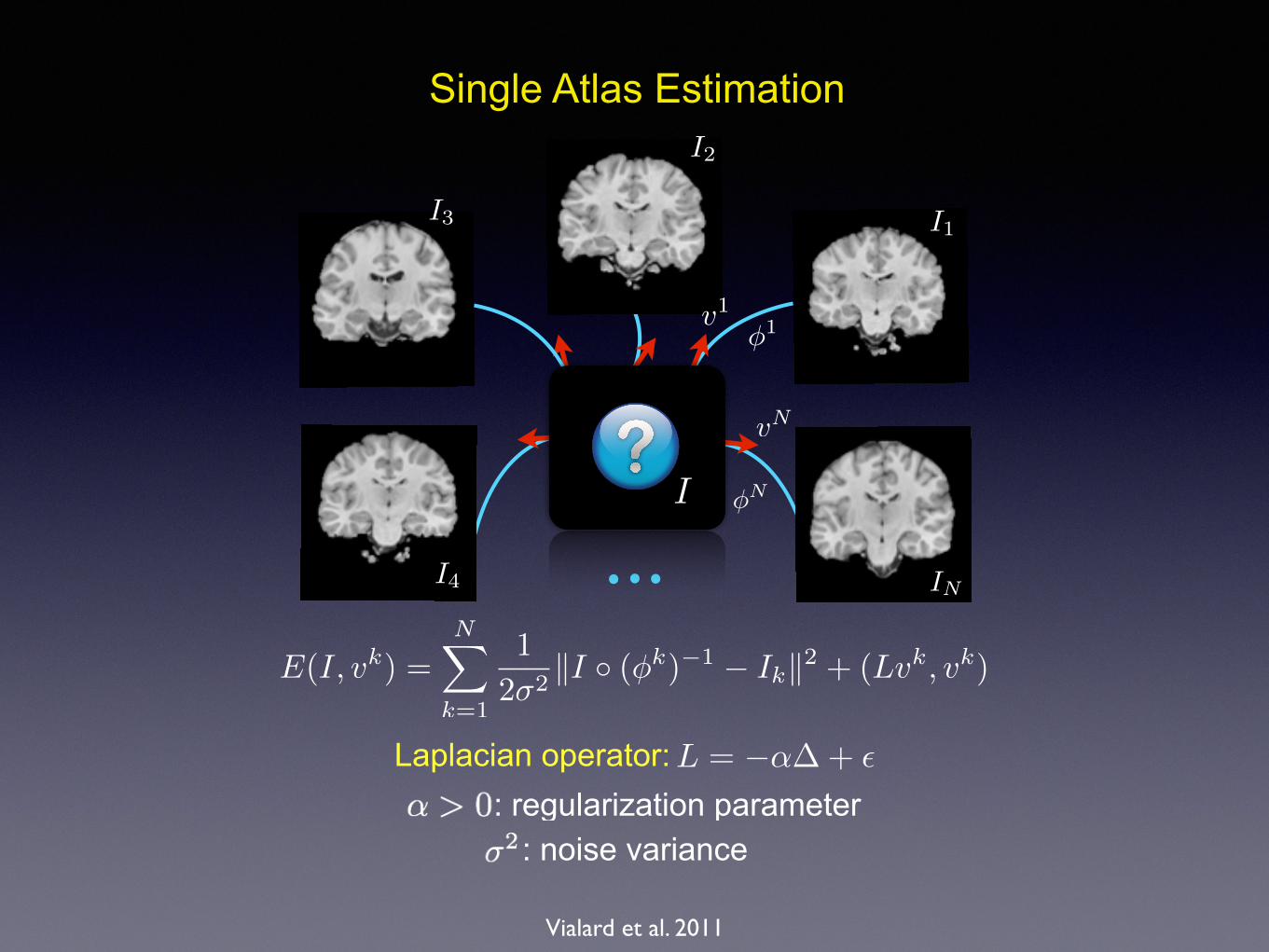
Vialard et al. 2011
I1
I2
I3
I4 IN
I �N
�1v1
vN
E(I, vk) =NX
k=1
1
2�2kI � (�k)�1 � Ikk2 + (Lvk, vk)
L = �↵�+ ✏Laplacian operator:: regularization parameter
: noise variance
Single Atlas Estimation
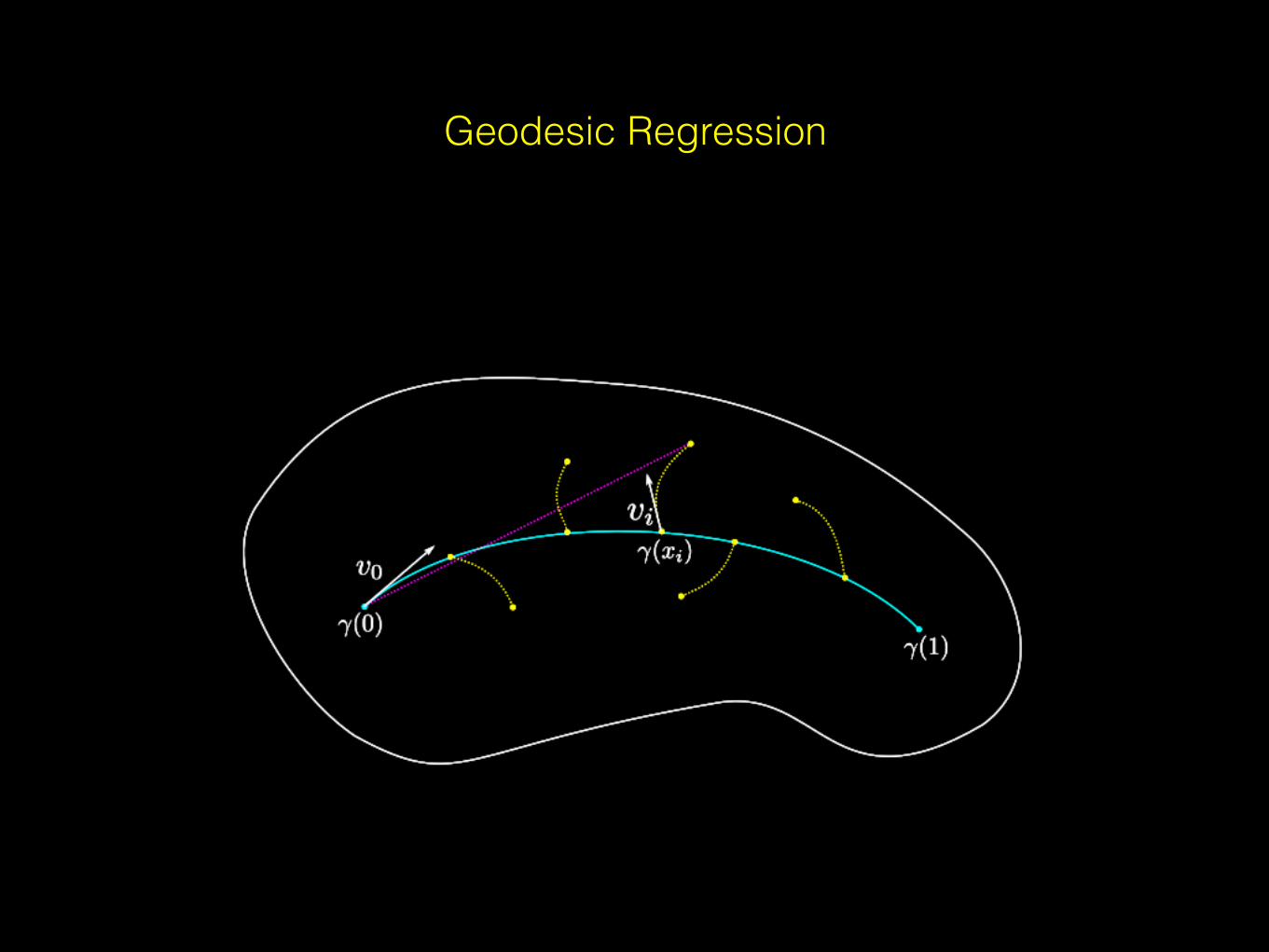
Geodesic Regression
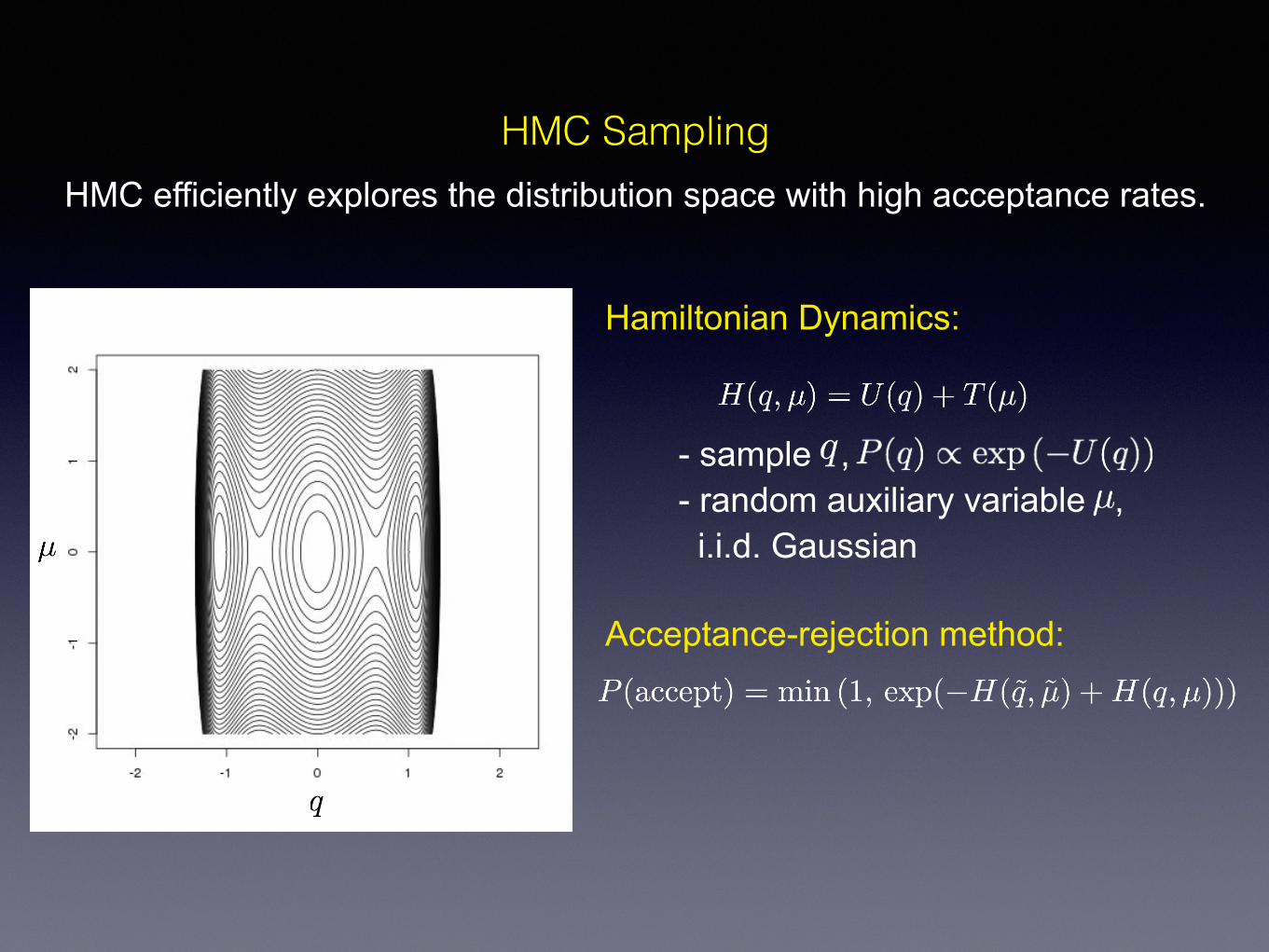
HMC efficiently explores the distribution space with high acceptance rates.
Acceptance-rejection method:
Hamiltonian Dynamics:
- sample , - random auxiliary variable , i.i.d. Gaussian
HMC Sampling







