
1
Consortium for Autonomous Space Systems CASS Texas A&M University . Air Force Research Laboratory . University of Texas
Dynamics and Control UpdateDynamics and Control Update
Texas A&M UniversityTexas A&M University
John ValasekJohn Valasek28 February 200728 February 2007

2
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Full Professors– Hyland (half time with Dean’s Office)– Junkins– Strganac – Vadali– ?????
Associate Professors– Hurtado– Mortari– Pollock – Valasek
Assistant Professors– Bhattacharya*– Chakravorty*– Kalmar-Nagy*
________________________*not yet tenured
Migrations– Alfriend– Ward– Crassidis
Adjunct– Turner
Aerospace D&C FacultyAerospace D&C Faculty

3
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Receiver UAVWingspan: 11.5 ftWing Area: 2107 in2Aspect Ratio: 9Airfoil: 4412 at the root, 2412 at the tipFuel systems: 64 oz model fuel tankWeight: 58 lbsPower plant: Brison 6.4cu intwin cylinder engine rated at 9 BHP (without muffler)C&I Electronic IgnitionPropeller: 24” diameter with 12" pitch
Tanker UAVWingspan: 14.25 ftWing Area: 2880 in2Aspect Ratio: 10Airfoil: 4412 at the root, 2412 at the tipFuel systems: 64 oz model fuel tankWeight: 70 lbs Power plant: Brison 6.4cu intwin cylinder engine rated at 9 BHP (without muffler)C&I Electronic IgnitionPropeller: 26” diameter with 10" pitch
Goal: demonstrate first air-to-air docking of UAV tanker and UAV receiver, without human supervision or intervention
Scheduled for 2nd Quarter 2007 Sensor– VisNav relative navigation
optical sensor Controller
– Reference Observer Tracking Controller (ROTC)
Air Vehicles– Custom
Phase II SBIR 10+ flights to date Refueling hardware installed Sensor integration
proceeding
5
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
• Project Introduction• 11+ years of space flight, nanosatellite design, student education at ASU
• Over 750 students (mostly undergraduate and of all disciplines and levels)• Provision of real aerospace projects
• Sounding rocket launch out of Wallops Island in 2000• Several high-altitude balloon launches• Two major satellite programs launched with the Air Force
• ASUSat1 on 1st OSP Space Launch Vehicle “Minotaur” out of Vandenberg in Jan 2000
• Three Corner Sat on Delta IV Heavy Demo out of Cape Canaveral in Dec 2004 as part of University Nanosat program I/II
• AggieSat Lab established in March 2005 • Vision Statement: To demonstrate and develop modern technologies by
utilizing nanosatellite platform while educating students and enriching undergraduate experience.
• Problem/Challenge• Consider lessons learned from our previous missions, provide systems perspective
and implement realistic experimental program featuring series of satellites.

6
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Current ProjectsCurrent Projects
• AggieSat1• AFRL UN4
Competition– 30 kg
nanosatellite – Demonstrating
RSM Architecture
• AggieSat2– JSC/TAMUS/UT
Austin Collaboration
– 3.5 kg cubesat
– Inaugural Mission of LONESTAR Campaign
• AggieSat3– AFRL UN5
Competition
– 50 kg nanosatellite
– Relative navigation demonstration

7
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
• AggieSat2: 1st of 4 satellite pairs 4th pair of satellites will demonstrate autonomous
rendezvous and docking (ARD) AggieSat2 will test communications and GPS systems Work directly with Johnson Space Center (JSC) Collaborative effort with University of Texas at Austin
LONESTAR LONESTAR (Low-earth Orbiting Experimental (Low-earth Orbiting Experimental Satellites to Test Autonomous Rendezvous)Satellites to Test Autonomous Rendezvous)

9
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
COM & Tracking
Demo
System Test Flight
ARD Sensor/ Mechanism Validation
Complete ARD Demo
Baseline CampaignBaseline Campaign

10
Consortium for Autonomous Space Systems CASS Texas A&M University . Air Force Research Laboratory . University of Texas
DOD Consortium for DOD Consortium for Autonomous Space SystemsAutonomous Space Systems
(CASS) (CASS)

11
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
CASS Goals ICASS Goals I Enable Collaboration Between the Air Force Research
Laboratory and CASS Universities to– Conduct Research on Important Autonomous Spacecraft Technology
Accelerate Progress to Address Critical DOD Needs Accelerate Technology Transfer to Next Generation DOD Spacecraft Systems
– Enhance Education of the Future Aerospace Workforce Involve both graduate and undergraduate students (U.S. Citizens, about 70
students/year) in research
Enhance and Utilize the Unique Strengths of Two Excellent Academic Institutions:
Texas A&M University and the University of Texas, … teamed with AFRL and Industry

12
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Conduct Basic and Applied Research to Enable the Next Generation of DOD Space Systems that are
– More Intelligent and More Autonomous Self-Aware, Self-Healing, and Re-Configurable
– Lighter/Smaller for a Given Functionality Less Expensive to Launch
– More Responsive and More Adaptive Cooperation of multi-spacecraft systems
Research and Develop Innovative Spacecraft Designs:– Advanced Computing, Sensing, and Intelligent Control Systems for Responsive Space and
Counter Space Mission Scenarios Modular Plug and Play Sub-System Designs
– Engineering models and flight prototypes to facilitate technology validation and transfer Team with industry
CASS Goals IICASS Goals II

13
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Operation of CASSOperation of CASS– CASS research will have five major thrusts:
Smart Sensing Technologies Satellite Design Satellite Constellation and Formation Analysis Autonomous Control Methods Precision Navigation and Orbit Determination
– Each project will be formed by the advisory board; the teams may draw expertise from several thrusts with PIs from both Universities, and will typically cross the boundaries of the above thrusts
– Typically about 10 projects will be active at any time.
– Frequent reviews will stress collaboration and each project will be evaluated based upon measures of how well the work is achieving its goals; progress toward technology transfer will be considered.
– The AFRL advisors will assist the advisory board in planning the research projects for each year in evaluations/feedback.
– Funds for projects which fail to make satisfactory progress will be re-programmed by the advisory board to accelerate successful projects.

14
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
CASS Organizational StructureCASS Organizational Structure
John L. Junkins/NAELead Principal Investigator
TEES/Texas A&M University
Byron Tapley/NAELead Principal Investigator
The University of Texas
Dr. ABC, A&M PILead PI forResearch
Topic TAMU-1
Dr. XYZ, A&M PILead PI forResearch
Topic TAMU-N
…Dr. ABC, UT PI
Lead PI forResearch Topic UT-1
Dr. XYZ , UT PILead PI forResearch
Topic UT-N
…
Staff
Industry partners
Grad students
Undergrad students
Staff
Industry partners
Grad students
Undergrad students
Staff
Industry partners
Grad students
Undergrad students
Staff
Industry partners
Grad students
Undergrad students
Dr. James D. TurnerOperational Director
TEES Admin and Fiscal Staff
John L. Junkins, DirectorTexas Engineering Experiment StationAFRL
Dr. Robinson Contract Monitor
Advisory Board Dr. Bishop Dr. Reed Dr. Tapley Dr. XYZ

15
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Constellations and Imaging for Standoff Space Situational AwarenessConstellations and Imaging for Standoff Space Situational AwarenessD. C. Hyland (PI), S. Chakravorty (Co-PI), D. Mortari (Co-PI)D. C. Hyland (PI), S. Chakravorty (Co-PI), D. Mortari (Co-PI)-- Exploits Entry Pupil Processing Technologies for design of a LEO-based observatory for ultra-fine -- Exploits Entry Pupil Processing Technologies for design of a LEO-based observatory for ultra-fine resolution imaging of GEO objectsresolution imaging of GEO objects
Entry Pupil Processing: System Level --Entry Pupil Processing: System Level --
One s/c receives the data signals. Determines coherence values and reconstructs image
Each s/c records
photodetector output signal
and sends data via comm. to coordinating
s/c
Each spacecraft an independent, interchangeable light collector.
No formation-keeping constraints (at the nanometer level) for the transfer of collected beams
Metrology requirements for Hanbury Brown-Twiss technique are extremely benign
16
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
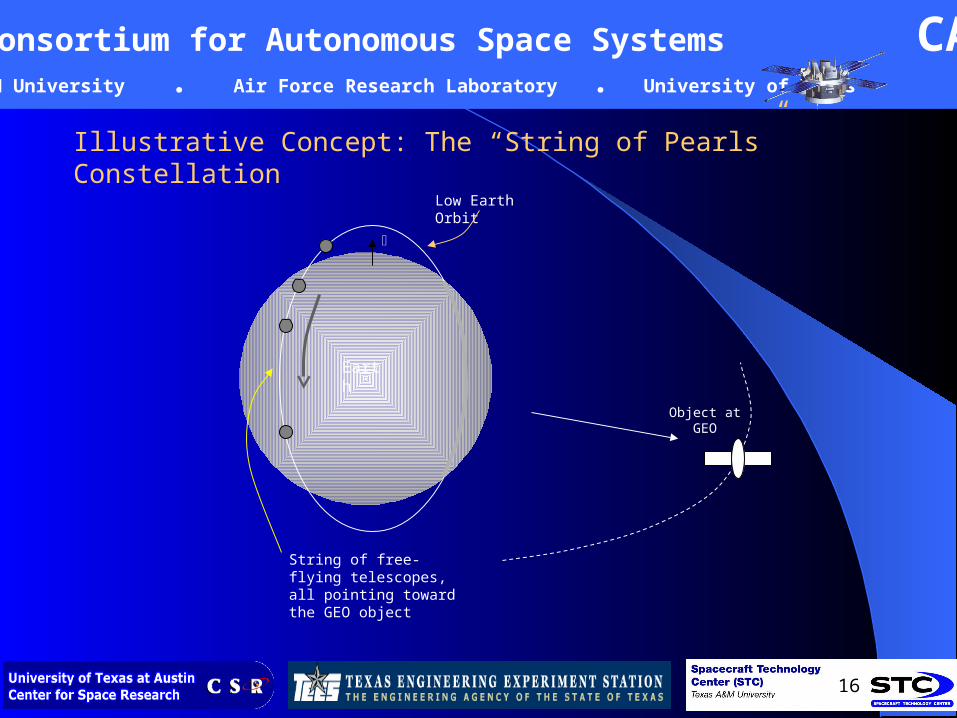
Earth
Low Earth Orbit
Object at GEO
String of free-flying telescopes, all pointing toward the GEO object
Illustrative Concept: The “String of Pearls” Constellation

17
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Example: “Skylab” at GEOExample: “Skylab” at GEO
1 pixel =1 cm
18
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
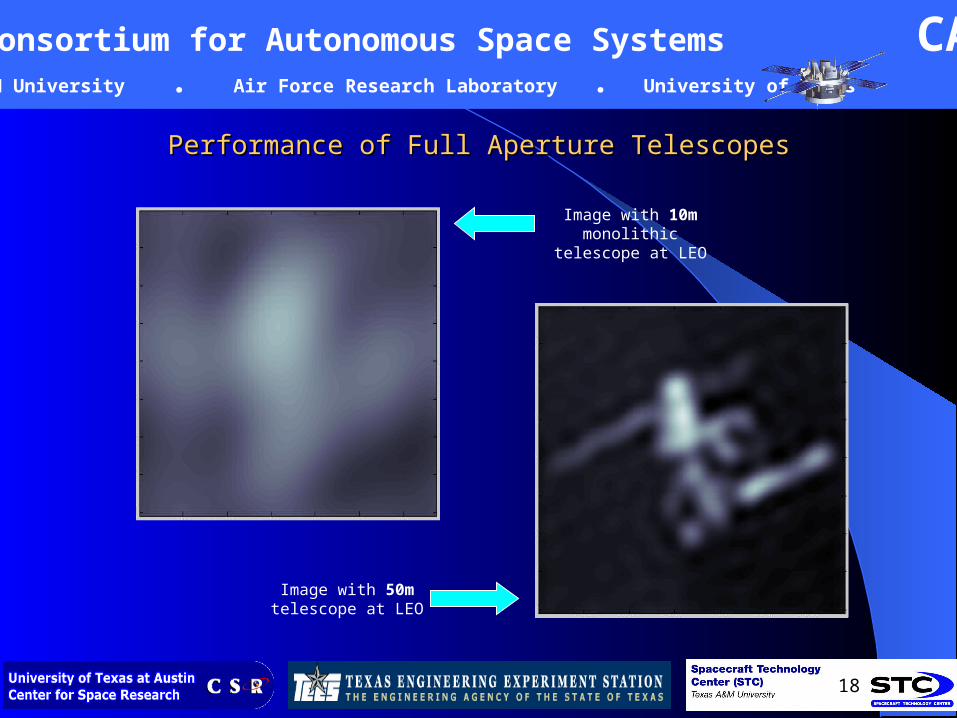
Performance of Full Aperture TelescopesPerformance of Full Aperture Telescopes
Image with 10m monolithic telescope at
LEO
Image with 50m telescope at LEO

19
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Reconstructed Image: Reconstructed Image: = 0.5 , Total length of formation = 1800 m. Resolution = 1cm.
20
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
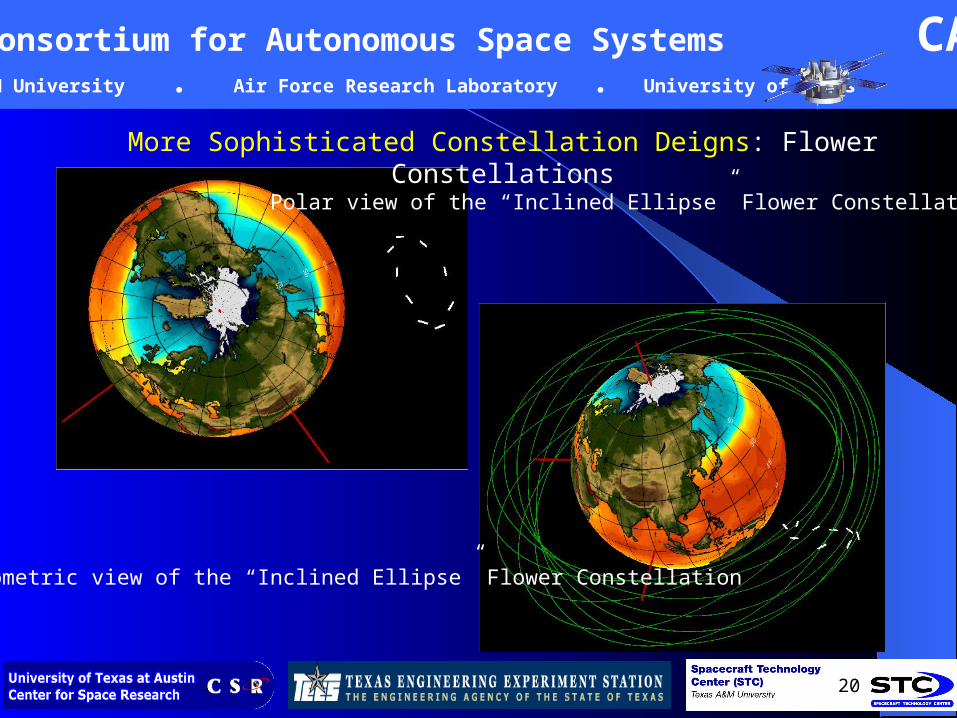
Polar view of the “Inclined Ellipse” Flower Constellation
Axonometric view of the “Inclined Ellipse” Flower Constellation
More Sophisticated Constellation Deigns: Flower Constellations

21
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Active Maneuvering Strategies for High Active Maneuvering Strategies for High Resolution ImagingResolution Imaging
Problem Statement: Design of optimal maneuvers for the imaging of space objects at a desired resolution using multiple Separated Spacecraft Interferometry
PIs: Dr. S. R. Vadali and Dr. S. Chakravorty Importance to AFRL: Mission Analysis Tool that allows for the
complete design of an active maneuvering system given the parameters of the desired mission such as “desired resolution”, “Orbit Location/ size: Near-Earth or Libration point”, “desired fuel usage”, “size of telescopes” and “number of spacecraft”.
Extremely useful tool for designing space systems for Space Situational Awareness, a long-term goal of AFRL.

22
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Real-Time, Sub-Optimal Control Real-Time, Sub-Optimal Control for Multi-Vehicle Systemsfor Multi-Vehicle Systems
John E. Hurtado, Tamás Kalmár-Nagy
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas

23
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
XY
Z
V1L6C1G99
ISAT Model
XY
Z
V1L6C1G2
ISATpartially deployed
Deployed Section
(proprietary information of Lockheed Martin and Harris Corporation)
Modulating Retro-Reflectorsmounted on local (section) metrology sensor
ISAT End View:Section Metrology
Three MRRs per section sensor are imaged by VisNav sensormounted on the Central Body
Any of several local metrology sensors can be used to Make the on the local measurements of each section.
Local SectionMetrologySensor
Global MetrologySensor View of
The MRRs onThe Section
Sensors
Sensors and Algorithms for Large Space Structure MetrologySensors and Algorithms for Large Space Structure MetrologyJunkins, Hurtado, collaboration with StarVision Technology, Lockheed Martin, et alJunkins, Hurtado, collaboration with StarVision Technology, Lockheed Martin, et al
VisNav
Creamer, et alNRL

24
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
SEARCH: Space-Eye Awareness and SEARCH: Space-Eye Awareness and Reconnaissance Camera HardwareReconnaissance Camera Hardware
Compatible orbit for periodic close encounters– Rendezvous / Single / Dual Impulse transfers– Many S/C (Gen. Cluster & 7th Space Cavarly)– Touch-to-GEO with Flower Constellations
High dynamic range imaging (HRDI)– Full information from different levels of illumination– Data processing at video rate– Hardware solution

25
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Autonomous Mobile Robotic System Autonomous Mobile Robotic System Concepts to Enable Ground Testing ofConcepts to Enable Ground Testing ofMulti-Spacecraft Proximity OperationsMulti-Spacecraft Proximity Operations
John Junkins, John Valasek
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas

26
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Stewie VideoStewie Video
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas

27
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Consortium for Autonomous Space Systems CASSTexas A&M University . Air Force Research Laboratory . University of Texas
Point of Contact
John Valasek
Aerospace Engineering Department
Texas A&M University
3141 TAMU
College Station, TX 77843-3141
(979) 845-1685
Department Web Page– http://aero.tamu.edu







