CFETR's Installation and Maintenance on Teleoperation
Institute of Intelligent Machines, Chinese Academy of Sciences
Zengfu Wang
(Qingquan Yan)
2012-5-15

- 2 -
Main topics
2. Our solution
3. Innovation Point
1. Current Research - Domestic and Abroad
4. Research foundation

- 3 -
1. Current Research - Domestic and Abroad

- 4 -
Fusion
Cabin
In order to accomplish the tasks on observation, Inspection, removal,
assembly, recycling, transport and restoration through tele-operation under the
nuclear environment, we must firstly solve the problems of stable collection,
reliable operation, effective representation and correct recognition of
all kinds of state information in fusion cabin, and therefore provide scientific
basis for decision and control.
Both physical and chemical environments are severe.
The geometry is complex
Outline of the Research
High Temperature
Vacuum Radiation Contamination

- 5 -
Current Research
Imaging
DeviceCCD Camera
VacuumUtilizing stainless steel
and glass to protect it
from the outer
High
temperature
Alloy is plated on the outer side
of supported arm.To increase the
thermal resistance, use Nitrogen
to cold.
Solution to ITER(1)
Radiation The radiation is under
consideration.
Illumination LEDs

- 6 -
Current Research
Solution to ITER (2)

- 7 -
Current Research
Solution to ITER (3)

- 8 -
Current Research
The direct visual representation method used in
ITER doesn’t contain the profound meanings,
thus it’s not contributed to the operator for
using the input effectively.
CCD camera along with the LEDs can’t go well
under the high temperature, vacuum, radiation
circumstance.
In Question

- 9 -
The Targets
It’s essential to reconstruct the 3D scene of fusion
cabin of ITER. The task may help us perform the virtual
path planning, accomplish the validation and evaluation
of operation, and avoid the collision with other devices.
The automatic detection of abnormal events based on
the visual info tends to be a promising project, and may
avoid the occasional checking failures caused by
operator fatigue and mistakes.
To observe stably, we should exploit the visual device
fitted to the inner ITER .
- 10 -
Our Solution
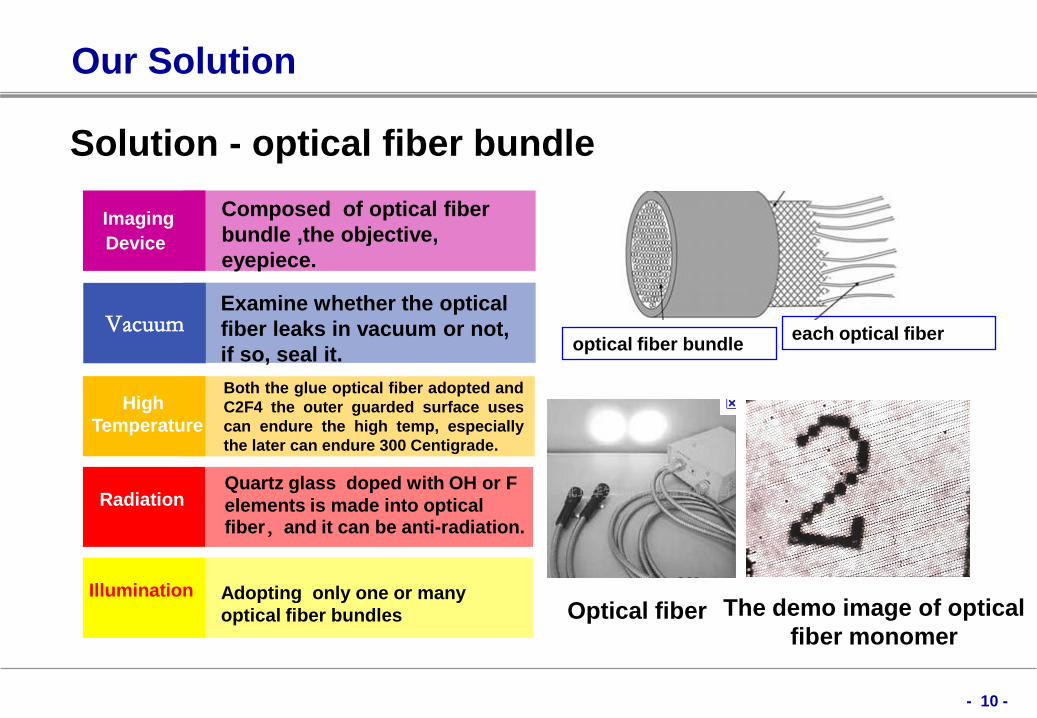
Solution - optical fiber bundle
Optical fiber The demo image of optical
fiber monomer
Imaging
Device
Composed of optical fiber
bundle ,the objective,
eyepiece.
VacuumExamine whether the optical
fiber leaks in vacuum or not,
if so, seal it.
High
Temperature
Both the glue optical fiber adopted and
C2F4 the outer guarded surface uses
can endure the high temp, especially
the later can endure 300 Centigrade.
RadiationQuartz glass doped with OH or F
elements is made into optical fiber,and it can be anti-radiation.
Illumination Adopting only one or many
optical fiber bundles
optical fiber bundleeach optical fiber

- 12 -
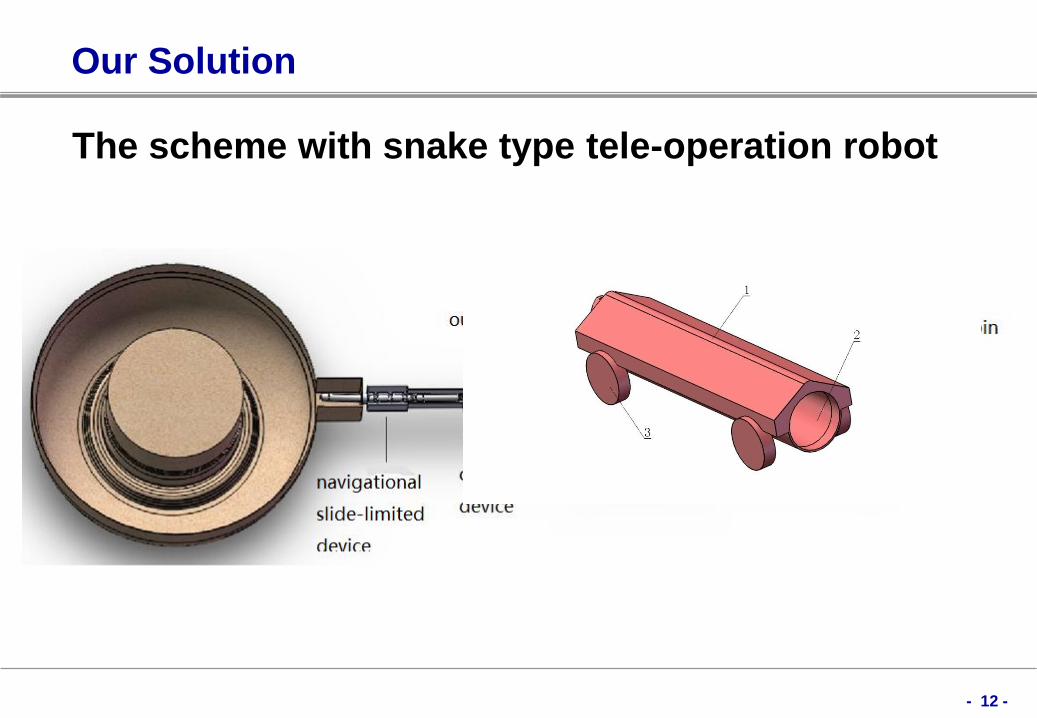
Our Solution
The scheme with snake type tele-operation robot

- 13 -
Our Solution
The scheme with snake type tele-operation robot

- 14 -
Our Solution
Design and realization of teleoperation system
based on visual feedback
Based on the developed of the integrated
snake robot, we propose to add the visual
sensing and teleoperation, to develop the
augmented reality reproduction algorithm on
visual input and real scene model, to realize
the teleoperation system with visual feedback
and testify in the experiment, to have the
robot’s teleoperation succeeded under manual
intervention.

- 15 -
Our Solution
The design and realization of the teleoperation
system combined with visual and force feedback
Based on the developed of the visual feedbackteleoperation, manipulator as well as end
effector (i.e smart hand),and also the
corresponding force feedback are added. We
accomplish recycling, replacing etc. by vision,
in company with testifying the robot’s
function, using online high precision target
localization algorithm and visual repre-
sentation of the force, following the instru-
ction.
- 16 -
The research on Control Algorithm Combined Tele-
operation with Autonomous Control
We’re carrying out the research combined teleoperation
with autonomous control on body movement of the
nuclear robot. On the one hand, operators directly
handle the manipulator to realize multi-pose and multi-
DOF movement through HMI, on the other hand, the
balance and every part’s movement of the robot is
controlled by the inertial’s obtaining pose on itself.
Balance control and movement distribution ensure that
it won’t overturn.
Our Solution

- 17 -
3. Innovation point
- 18 -
Innovation point
The project adopts optical fiber imaging system
to observe in the nuclear fusion cabin. It may
make good performance on high temperature,
vacuum, image sensing under radiation.
Besides, we propose effective and easy
accomplished method for 3D reconstruction
according to the structural feature. It may lay a
good foundation of virtual path planning and
collision detection of 3D model as well as
teleoperation.

- 19 -
4. Research foundation

- 20 -
Research foundation
Our team has a further study on stereo vision, and
we’ve proposed many kinds of effective stereo
matching algorithm. Especially Region Based Stereo
Matching Algorithm Using Cooperative Optimization
works best. This algorithm ranks top on the inter-
nationally accepted stereo vision evaluation website
Middlebury so far.
We carried out the research on 3D modeling well ,with
the wide-range, our outstanding field . We constructed a
3D reconstruction system based on image sequences
matching , highly praised by the experts.


- 22 -
Our team pre-researched the recovery of the
optical fiber bundle images.
Research foundation

- 23 -
Basis we have
Our team pre-researched the image enhancement
under low illumination.

- 24 -







