
3-week Report
Calculations of the FlowAround a Sphere in a Fluid
Jeppe Gavnholt (s001484)Mads Brøkner Christiansen (s001612)
Christian Kallesøe (s001363)Joachim Alexander Furst (s001385)
Jesper Pedersen (s001443)
Supervisor: Henrik Bruus
MIC – Department of Micro and NanotechnologyTechnical University of Denmark
24th June 2004


Abstract
This project concerned the drag experienced by a sphere while moving withconstant velocity through an incompressible fluid. The well-known formula forthe Stokes drag was derived thoroughly using analytical methods. The Oseencorrection to this solution was demonstrated. Numerical solutions for the dragobtained using FEMLAB were calculated and compared to the expressions cal-culated using analytical methods. Finally, a rule of thumb for calculating thedrag for small channel radii was derived.
Jeppe Gavnholt, Mads Brøkner Christiansen, Jesper Pedersen,Christian Kallesøe and Joachim A. Furst
MIC – Department of Micro and NanotechnologyTechnical University of Denmark
24th June 2004


Resume
Dette projekt omhandlede træk-modstanden pa en kugle, som bevæger sig medkonstant hastighed gennem en inkompressibel væske. Den velkendte formel forStokes træk-modstanden blev grundigt udledt via analytiske metoder. Oseenkorrektionen til denne løsning blev demonstreret. Ved hjælp af FEMLAB blevnumeriske løsninger udregnet og sammenlignet med udtrykkene fundet ved brugaf analytiske metoder. Endelig blev en tommelfingerregel for beregning af træk-modstanden for sma kanal radier udledt.
Jeppe Gavnholt, Mads Brøkner Christiansen, Jesper Pedersen,Christian Kallesøe and Joachim A. Furst
MIC – Institut for Mikro- og NanoteknologiDanmarks Tekniske Universitet
24th June 2004


Contents
1 Introduction 11.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Chapter Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Analytical Methods 32.1 Stokes Drag . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.2 Improved Approximations . . . . . . . . . . . . . . . . . . . . . . 9
3 Numerical Methods 133.1 FEMLAB Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 133.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
4 Conclusion 25
A FEMLAB Scripts 29A.1 calcDrag.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29A.2 setAppMode.m . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33


Chapter 1Introduction
1.1 Motivation
Calculation of the drag on a spherical object in a fluid is often required whendesigning microfluidic systems. The well-known Stokes drag formula is veryeasy to work with, but care must be taken to ensure that the deviation from theexact drag does not become too large. This may well be the case for microfluidicsystems in which the assumption of infinitely wide channels included in thederivation of the Stokes formula, is clearly no longer valid. The exact natureof the drag for these geometries will need to be considered. A rule of thumbfor calculating the drag for small channel radii would be desirable. Also, thevelocity dependence of the drag will need to be determined.
1.2 Chapter Outline
This report focuses on the problem of a sphere moving through a fluid withconstant velocity.
Chapter 2 is concerned with analytical solutions to the problem, starting witha derivation of the well-known Stokes drag formula. This is improved by use ofthe Oseen correction, which adds an additional term to the drag.
Chapter 3 outlines the numerical methods used to calculate the drag. FEM-LAB routines and parameters are discussed and the results obtained throughnumerical analysis are presented. Also, a rule of thumb for calculating the dragfor small channel radii is derived.
Chapter 4 serves to sum up the conclusions of the project.
Appendix A contains the FEMLAB scripts used to determine the velocityand channel radius dependence of the drag. Care has been taken to ensure thatthe code is both comprehensible and flexible.

2 1.2 Chapter Outline
Chapter 2Analytical Methods
This chapter outlines the analytical methods used to determine the drag ona sphere moving through a newtonian fluid. The well-known formula for theStokes drag is derived under the assumption that inertial forces are negligiblecompared to the viscous forces. The drag formula is then improved by consid-ering the inertial terms, using the Oseen expansion.
2.1 Stokes Drag
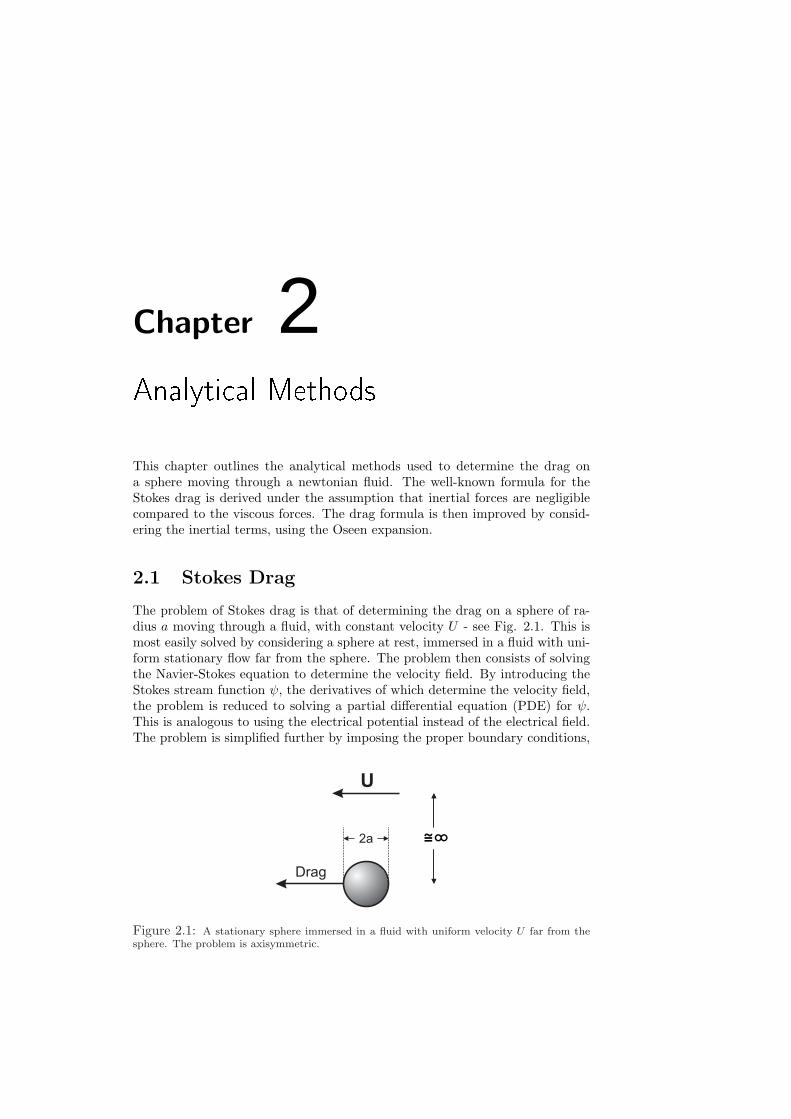
The problem of Stokes drag is that of determining the drag on a sphere of ra-dius a moving through a fluid, with constant velocity U - see Fig. 2.1. This ismost easily solved by considering a sphere at rest, immersed in a fluid with uni-form stationary flow far from the sphere. The problem then consists of solvingthe Navier-Stokes equation to determine the velocity field. By introducing theStokes stream function ψ, the derivatives of which determine the velocity field,the problem is reduced to solving a partial differential equation (PDE) for ψ.This is analogous to using the electrical potential instead of the electrical field.The problem is simplified further by imposing the proper boundary conditions,
Figure 2.1: A stationary sphere immersed in a fluid with uniform velocity U far from thesphere. The problem is axisymmetric.

4 2.1 Stokes Drag
in the end reducing the problem to that of solving an ordinary differential equa-tion in order to obtain ψ. This is used to calculate the pressure, which in turndetermines the stress components on the sphere, allowing us to calculate thetotal drag force experienced by the sphere.
Reducing the Navier-Stokes equation
The Navier-Stokes equation for an incompressible fluid is [1]
ρD
(∂u∂t
+ (u · ∇)u)
= −∇p + µ∇2u + f , (2.1)
where ρD is the mass density of the fluid, u is the velocity field, p is the pressure,µ is the viscosity and f denotes any external body forces.We assume a very low Reynolds number Re = Ulρ/µ, where l is the charac-teristic length [1], which is in the order of a in the region close to the sphere.This means that the viscous forces are dominant, so that we may disregard theinertial term (u · ∇)u. Furthermore we seek a stationary solution so that theNavier-Stokes equation reduces to
∇p = µ∇2u. (2.2)
Keeping in mind the equation for second derivatives∇×(∇×u) = ∇(∇·u)−∇2uand the fact that ∇ · u is zero for an incompressible fluid due to the continuityequation [1], we may rewrite the Navier-Stokes equation as
∇p = −µ∇× (∇× u) = −µ∇×Ω, (2.3)
where we have introduced the vorticity of the velocity field, Ω = ∇ × u. Thespherical symmetry of the problem leads us to seek an axisymmetric velocityfield
u = ur(r, θ)er + uθ(r, θ)eθ.
The Stokes stream function
The divergence ∇·u in spherical coordinates, for an axisymmetric velocity field,is given as
∇ · u =1r2
∂
∂r
(r2ur
)+
1r sin θ
∂
∂θ(uθ sin θ)
To automatically satisfy the condition of incompressibility of the fluid, ∇·u = 0,we introduce the Stokes stream function ψ(r, θ) such that
ur =1
r2 sin θ
∂ψ
∂θ, uθ = − 1
r sin θ
∂ψ
∂r. (2.4)
Thus the velocity field is uniquely defined by the stream function ψ(r, θ). Inorder to determine the stream function from the reduced Navier-Stokes equationEq. (2.3) we proceed to calculate the vorticity
Ω = ∇× u = Ωrer + Ωθeθ + Ωφeφ.

2.1 Stokes Drag 5
Now, since u is axisymmetric the vorticity must be axial, having only a φcomponent. Using Eq. (2.4) we find
Ωφ =1r
(∂
∂r(ruθ)− ∂ur
∂θ
)
=1r
(∂
∂r
(− 1
sin θ
∂ψ
∂r
)− ∂
∂θ
(1
r2 sin θ
∂ψ
∂θ
))
= − 1r sin θ
(∂2ψ
∂r2+
sin θ
r2
∂
∂θ
(1
sin θ
∂ψ
∂θ
))
= − 1r sin θ
E2ψ,
where we have introduced the differential operator
E2 =∂2
∂r2+
sin θ
r2
∂
∂θ
(1
sin θ
∂
∂θ
). (2.5)
We insert this result in the momentum equation Eq. (2.3) and find
∇p = −µ∇×Ω
= − µ
r sin θ
(∂
∂θ
(−1
rE2ψ
))er +
µ
r
(∂
∂r
(− 1
sin θE2ψ
))eθ
=µ
r2 sin θ
∂
∂θ
(E2ψ
)er − µ
r sin θ
∂
∂r
(E2ψ
)eθ.
The left-hand side of this equation is given in spherical coordinates as
∇p =∂p
∂rer +
1r
∂p
∂θeθ +
1r sin θ
∂r
∂φeφ.
Equating terms in each of the directions er and eθ we arrive at two differentialequations for the pressure
∂p
∂r=
µ
r2 sin θ
∂
∂θ
(E2ψ
),
∂p
∂θ= − µ
sin θ
∂
∂r
(E2ψ
). (2.6)
Cross-differentiation of each of these equations yields
∂
∂θ
(∂p
∂r
)=
µ
r2
∂
∂θ
(1
sin θ
∂
∂θ
(E2ψ
)),
∂
∂r
(∂p
∂θ
)= − µ
sin θ
∂2
∂r2
(E2ψ
).
Since these cross-differentiations must be equal we find
∂2
∂r2
(E2ψ
)+
sin θ
r2
∂
∂θ
(1
sin θ
∂
∂θ
(E2ψ
))= 0
E2(E2ψ
)= 0. (2.7)
Finally, inserting the original definition of the differential operator Eq. (2.5) wearrive at a differential equation for the Stokes stream function
[∂2
∂r2+
sin θ
r2
∂
∂θ
(1
sin θ
∂
∂θ
)]2
ψ = 0. (2.8)
We impose the following boundary conditions on the solution:

6 2.1 Stokes Drag
Figure 2.2: The geometrical relations in the far-field.
• No-slip condition on the sphere surface, u (a, θ) = 0
• Uniform flow of speed U far from the sphere
Using Eq. (2.4) the no-slip condition implies
∂ψ
∂r
∣∣∣∣r=a
= 0,∂ψ
∂θ
∣∣∣∣r=a
= 0. (2.9)
Considering Fig. 2.2, the condition of uniform flow far from the sphere may beformulated as
limr→∞
ur = U cos θ , limr→∞
uθ = −U sin θ.
This boundary condition will need to be reformulated as a requirement on ψrather than u. Using Eq. (2.4) to insert expressions in ψ in place of ur and uθ,this may be accomplished through two integrations, yielding
1r2 sin θ
∂ψ
∂θ= U cos θ ⇒ ψ = 1
2Ur2 sin2 θ + f(r),
− 1r sin θ
∂ψ
∂r= −U sin θ ⇒ ψ = 1
2Ur2 sin2 θ + f(θ).
Thus f(r) = f(θ) = 0 and the boundary condition may be reformulated as
limr→∞
ψ = 12Ur2 sin2 θ. (2.10)
This leads us to search for a solution of the form
ψ = f(r) sin2 θ. (2.11)
Let us examine the effect of the differential operator E2 on a solution of thisform.
E2(f(r) sin2 θ
)=
∂2
∂r2
(f(r) sin2 θ
)+
sin θ
r2
∂
∂θ
(1
sin θ
∂
∂θ
(f(r) sin2 θ
))
=d2f(r)
dr2sin2 θ +
sin θ
r2
∂
∂θ
(f(r)sin θ
2 sin θ cos θ
)
=(
d2
dr2− 2
r2
)f(r) sin2 θ.

2.1 Stokes Drag 7
Now, we may define a new function
g(r) =(
d2
dr2− 2
r2
)f(r),
so that we find
E2(E2
(f(r) sin2 θ
))= E2
(g(r)sin2θ)
)
=(
d2
dr2− 2
r2
)g(r) sin2 θ
=(
d2
dr2− 2
r2
)2
f(r) sin2 θ.
If the trial function f(r) sin2 θ is to satisfy the differential equation for ψ, Eq.(2.7), this expression must equal zero. Thus we arrive at a requirement for thefunction f(r) in the shape of an ordinary differential equation
(d2
dr2− 2
r2
)2
f = 0.
The form of this differential equation suggests solutions of the type f(r) = rα.Inserting this leads to a fourth order equation in α
(d2
dr2− 2
r2
)2
rα = 0 ⇒(α(α− 1)− 2) ((α− 2)(α− 3)− 2) = 0.
The solutions of this equation are α = −1, 1, 2, 4. Thus we have arrived at asolution to the PDE for ψ of the form
ψ =(Ar−1 + Br + Cr2 + Dr4
)sin2 θ.
The four arbitrary constants are determined by applying boundary conditionsEq. (2.9) and Eq. (2.10). The condition of uniform flow far from the sphererequires that Cr2 be the dominant term as r →∞, which in turn implies D = 0.The precise formulation of the boundary condition, Eq. (2.10), yields
C = 12U.
The no-slip condition leads to two requirements of the derivatives of ψ. Theseare used to determine the two remaining constants, A and B. Using Eq. (2.9)we find
∂ψ
∂r
∣∣∣∣r=a
= 0 ⇒ − A
a2+ B + Ua = 0,
∂ψ
∂θ
∣∣∣∣r=a
= 0 ⇒ A
a+ Ba + 1
2Ua2 = 0.
Solving these equations yields the two final constants
A = 14Ua3,
B = − 34Ua.

8 2.1 Stokes Drag
Having now determined all arbitrary constants we have obtained the Stokesstream function
ψ = 14U
(2r2 − 3ar + a3r−1
)sin2 θ (2.12)
Inserted in equation Eq. (2.4) this gives us the velocity field of the fluid
u = U cos θ
(1− 3a
2r+
a3
2r3
)er − U sin θ
(1− 3a
4r− a3
4r3
)eθ. (2.13)
Calculating the drag on the sphere
In order to arrive at an expression for the total drag on the sphere, we need todetermine the pressure. An expression for the pressure is most easily obtainedby integrating Eq. (2.6). The first step is to determine the effect of the operatorE2 on the stream function
E2ψ =(
∂2
∂r2+
sin θ
r2
∂
∂θ
(1
sin θ
∂
∂θ
))(U
4(2r2 − 3ar + a3r−1
)sin2 θ
)
=U
4sin2 θ
(4 +
2a3
r3
)− U
2sin2θ
(2 +
a3
r3− 3a
r
)
=3Ua
2rsin2 θ.
Having found this, we may proceed by integrating Eq. (2.6) to find
p∞ − p(r) =∫ ∞
r
µ
r2 sin θ
∂
∂θ
(3Ua
2rsin2 θ
)dr
=3µUa
r2cos θ.
This is inserted into the expressions for the stress tensors in spherical coordinates[3]
σr = Trr = −p + 2µ∂ur
∂r
= −p∞ +3µU
2acos θ,
σθ = Trθ = µr∂
∂r
(uθ
r
)+
µ
r
∂ur
∂θ
= −3µA
2asin θ,
σφ = Trφ = 0.
Because of the symmetry of the problem, we expect the net drag force to be inthe direction of the uniform flow far from the sphere. The component of thestress tensor in this direction is given by
σ = σr cos θ − σθ sin θ = −p∞ cos θ +3µU
2a.

2.2 Improved Approximations 9
Thus we may calculate the total drag force experienced by the sphere by inte-grating this expression over the surface of the sphere, resulting in the well-knownexpression for the Stokes drag:
D =∫ 2π
0
∫ π
0
σa2 sin θdθdφ
D = 6πµUa. (2.14)
2.2 Improved Approximations
Far away from the sphere the characteristic length l in the Reynolds number isnot in the order of a, but the length over which the magnitude of the velocitychanges by the size of U . Since the Reynolds number expresses the ratio be-tween inertial and viscous forces in the fluid, removal of the inertial term in theNavier-Stokes equation, Eq. (2.1) is no longer justified. This can be understoodby noting that far away from the sphere the velocity field is nearly constant inspace. Thus there is hardly any friction, so that the viscous forces are no longermuch larger than the inertial forces.
In the following we will use dimensionless variables, r and ψ, such that r = r∗a∗
and ψ = ψ∗
U∗a∗2 , where a star denotes the real variables. We also introduce thevariable ρ defined as ρ = Re r.
Including the inertial term yields a non-linear equation of motion for the fluid,since it adds an extra term to Eq. (2.2) such that
∇p = −µ∇×Ω− ρD(u · ∇)u. (2.15)
Since the velocity field is still axisymmetric, this equation results in the twoscalar equations in the spherical directions er and eθ [3]
∂p
∂r= µ
[1r2
∂2
∂r2
(r2ur
)+
1r2 sin θ
∂
∂θ
(sin θ
∂ur
∂θ
)]
−ρD
[ur
∂ur
∂r+
uθ
r
∂ur
∂θ− u2
θ
r
], (2.16)
∂p
∂θ= µ
[1r
∂
∂r
(r2 ∂uθ
∂r
)+
1r
∂
∂θ
(1
sin θ
∂
∂θ(uθ sin θ)
)+
2r
∂ur
∂θ
]
−ρD
[rur
∂uθ
∂r+ uθ
∂uθ
∂θ+ uruθ
]. (2.17)
By using cross differentiation, as in the previous section, the pressure p can beeliminated. This results in the following differential equation for the streamfunction
E4ψ =Re
ρ2 sin θ
(∂ψ
∂θ
∂
∂r− ∂ψ
∂r
∂
∂θ+ cot θ
∂ψ
∂r− 2
r
∂ψ
∂θ
)E2ψ, (2.18)

10 2.2 Improved Approximations
where E2 is defined in Eq. (2.5). Such an equation cannot be solved analytically,so a solution is derived by expansion of the stream function with respect to theReynolds number. The stream function is expanded in the region close to thesphere as well as in the far region. Two different expansions are used. TheOseen expansion is used in order to obtain a more accurate velocity field in thefar region, while the Stokes expansion in the close field yields a better result forthe drag force on the sphere.
The Oseen expansion (far region)
We assume that the stream function in the far field can be expanded as apolynomial in the Reynolds number:
ψO(r, θ; Re) ≈ 12Re−2ρ2 sin2 θ + Re−1ψO1(ρ, θ), (2.19)
The first term is simply the stream function, Eq. (2.12), in the far field. TheOseen correction, ψO1(ρ, θ), can thus be found with the following expression
ψO1(ρ, θ) = LimO
(Re−1ψ(r, θ; Re)− LimO[ψ(r, θ;Re)]) , (2.20)
where the Oseen limit used is defined as
LimOψ(r, θ; Re) = limRe→0
[ψ(ρ, θ;Re)] with ρ and θ fixed, (2.21)
meaning that as Re goes to zero, r goes to infinity. Thus ψO1 is reminiscent ofa differential of ψ with respect to Re. Inserting Eq. (2.19) in Eq. (2.18) andtaking the terms that remain in the Oseen limit, i.e. keeping only the termswhere Re has the smallest exponent, gives the following differential equation forthe correction
E4ψO =(
cos θ∂
∂ρ− sin θ
ρ
∂
∂θ
)E2ψO
The first term in Eq. (2.19) vanishes during this operation, since it was derivedunder the condition E4ψ = 0, and because of the linearity of the E4 operator.Thus we have
E4ψO1 =(
cos θ∂
∂ρ− sin θ
ρ
∂
∂θ
)E2ψO1 (2.22)
Solving Eq. (2.22) is by no means straight forward. The following solutions,which are the only physical ones, can be checked by substitution [2]
ψO1 = −2A(1 + cos θ)(1− exp
(−ρ
2(1− cos θ)
))(2.23)
The constant A is found by requiring that the two dominant terms in Eq. (2.12)and in the Oseen expansion above fit in the limits r →∞ and ρ → 0 respectively.In other words the Reynolds number goes faster towards 0 than r goes to infinityso that Eq. (2.12) is valid in the far region. Expanding Eq. (2.23) in ρ we find
ψO1 ≈ A(
14ρ2 (1− cos θ)− ρ
)sin2 θ

2.2 Improved Approximations 11
Thus, using Eq. (2.19), we find in the limit ρ → 0
ψO ≈(
ρ2
2Re2−A
ρ
Re
)sin2 θ
The dominating terms of the Stokes stream function Eq. (2.12) as r →∞ is
ψS0 ≈(
ρ2
2Re2− 3ρ
4Re
)sin2 θ
We see then that A turns out to be 34 . Using Eq. (2.4) we may then determine
the velocity field in the Oseen approximation.
The Stokes expansion (close region)
We assume that the stream function close to the sphere can be expanded as apolynomial in the Reynolds number:
ψS(r, θ; Re) ≈ ψS0(r, θ) + ReψS1(r, θ), (2.24)
where ψS0 is the expression found in Eq. (2.12). The correction can thus befound with the following expression
ψS1(r, θ) = LimS
(Re−1ψ(r, θ; Re)− LimS [ψ(r, θ; Re)]) . (2.25)
The Stokes limit used is defined as
LimSψ(r, θ; Re) = limRe→0
[ψ(r, θ; Re)] with r and θ fixed. (2.26)
Inserting Eq. (2.24) in Eq. (2.18) and keeping the terms that remain in theStokes limit gives the following differential equation for the correction
E4ψS1 = −94(2r−2 − 3r−3 + r−5) sin2 θ cos θ (2.27)
This equation is solved by finding a particular solution and adding the formerlyfound solutions to the equation E4ψ = 0. This results in the two-term Stokesexpansion
ψS(r, θ; Re) = (14
+ B)(2r2 − 3r + r−1) sin2 θ
−3Re
32(2r2 − 3r + 1− r−1 + r−2) sin2 θ cos θ, (2.28)
where the arbitrary constant B is found by expanding this into two terms forRe → 0 and comparing with the first two terms found when expanding Eq.(2.23) for ρ → 0. B turns out to be 3
32 . Using this Eq. (2.28) can be regroupedinto
ψS(r, θ; Re) =14(r − 1)2 sin2 θ
((1 +
3Re
8
)(2 + r−1)
−3Re
8(2 + r−1 + r−2) cos θ
)(2.29)

12 2.2 Improved Approximations
The first order correction to the drag
Including another term in the Stokes expansion leads to better approximationof the drag. The analysis follows the same procedure as the one leading to Eq.(2.14) based on the two-term Stokes expansion Eq. (2.29) instead of Eq. (2.12).
The inertial term in the Navier-Stokes equation means that the differential ofthe pressure is given by Eq. (2.16), where uθ and ur are calculated using Eq.(2.4). In order to use this equation, we must reformulate the stream functionto the original unnormalized variables. Integrating Eq. (2.16), in an attemptto find the pressure, yields some unphysical terms. This is not surprising, sincethe stokes expansion is only valid close to the sphere. The problematic termsinclude ln(r), so they are removed. From the pressure and the velocity field theforce on the sphere can readily be calculated exactly as in Section 2.1. The twomost important terms for low Reynolds numbers are
D = 6πµUa
(1 +
3Re
8
). (2.30)

Chapter 3Numerical Methods
This chapter outlines the numerical process used to determine deviations fromthe Stokes drag for channels of small radii. The first section illustrates the modelused in FEMLAB, while the subsequent sections outline the results obtainedthrough the numerical analysis of the problem.
3.1 FEMLAB Model
While the analytical methods neglected the effects of walls on the velocity field,these are now included in the model. To ease the modelling we consider a channelwith cylindrical profile. The three-dimensional problem is then reduced to atwo-dimensional problem in cylindrical coordinates because of the symmetry inthe φ-direction, reducing the spatial dimensions to r and z. We used the modelsystem for the axisymmetric Navier-Stokes equation, included in FEMLAB. Thegeometry needed for FEMLAB is the one illustrated in Fig. 3.1. The boundaryconditions required of the solution are
(1) Uniform flow with velocity U , u = Uez.
(2) No-slip condition, u = 0.
(3) Axisymmetry.
(4) Constant pressure p = 0.
(5) Flow inlet u = Uez.
The boundary conditions (4) and (5) imply an infinite channel length in orderto be physical, since they require the influence of the sphere to be negligibleat these boundaries. We used a channel length a thousand times the sphereradius, which proved sufficient for this condition to be met. We fixed the radiusof the sphere to 1 µm, while varying the radius of the channel. After calculatingthe velocity field using the model described, we subtracted the velocity Uez toobtain the field for the sphere moving through the fluid.

14 3.2 Results
Figure 3.1: The geometry and boundary conditions used in the FEMLAB model. Theboundary conditions are: (1) Uniform flow with velocity U , (2) No-slip condition, (3) Ax-isymmetry, (4) Constant pressure p = 0, (5) Flow inlet u =Uez.
To determine the velocity and the channel radius dependence of the drag, weused the scripting tools available in MatLab. The scripts developed during theproject are included in appendix A.
3.2 Results
In this section we describe our results obtained through the numerical analysis.We start with comparing the Stokes velocity field and the Oseen corrected fieldto numerical calculations of the flow with low Reynolds number in a channelwith dimensions much larger than the sphere. This enables us to comparethe numerical solutions to the theoretical, since these are derived under theassumption that the walls are infinitely far away. We then move on to considerwhat happens to the drag as the Reynolds number increases, and finally weconsider the effects of walls relatively close to the sphere.
Comparison of Velocity Fields
Figs. 3.2 and 3.3 show the deviation in percent between the numerically calcu-lated flow at low Reynolds numbers in a large pipe and the two approximationsvalid close to the sphere (Eqs. (2.13) and (2.29), respectively).
As expected, both of the analytical solutions are quite good close to the sphere,but both approximations quickly diverge from the numerical calculation furtheraway from the sphere. The correction makes the approximation slightly better,as expected. The blue regions in the figures are extended somewhat, whereasthe yellow and red regions just move further out. We did not expect the theoret-ical approximations to be any good far from the sphere, because the Reynoldsnumber increases as we move away from the sphere and thus removal of theinertial term is unjustified.

3.2 Results 15
Figure 3.2: Deviation in percent between the numerically calculated flow fieldand the Stokes flow field in Eq. (2.13). Note the different length and colourscales.

16 3.2 Results
Figure 3.3: Deviation in percent between the numerically calculated flow fieldand the Oseen corrected Stokes flowfield derived from Eq. (2.29). Note thedifferent length and colour scales.

3.2 Results 17
Dependence on Reynolds Number
Figs. 3.4 and 3.5 show solutions to a sphere moving in a wide channel at dif-ferent Reynolds numbers. The figures show both the velocity fields and thepressures.
From the figures it is seen that, as expected, the velocity field is completelysymmetric at very low Reynolds numbers. The symmetry is obviously brokenas the Reynolds number passes one, where an increasingly larger tail is formedbehind the sphere. This is due to the growing importance of inertia in the fluid.Furthermore it is seen that the calculated drag agrees very well with the Stokesdrag formula as long as the Reynolds number is less than 0.1. In this range thedifference is smaller than 3%. When the Reynolds number is increased beyond0.1 the deviation between the numerically found drag and that obtained fromthe Stokes drag formula increases quite rapidly. At a Reynolds number of 5 thedifference is 44%.
The pressure graphs show, as expected, that the pressure is high in front ofthe sphere and low behind sphere. Furthermore it is seen that the influenceon the pressure far away from the sphere is negligible in these wide channels.However, for larger Reynolds numbers the low pressure area seems to extendfurther towards the front of the sphere.

18 3.2 Results
Figure 3.4: A sphere moving through a fluid in a wide channel. (left) thevelocity field, indicated by the colour grading, shows the absolute value. (right)the pressure. The Reynolds number is 10−3 and 0.1 in the upper part and thelower part respectively.

3.2 Results 19
Figure 3.5: A sphere moving through a fluid in a wide channel. (left) thevelocity field, indicated by the colour grading, shows the absolute value. (right)the pressure. The Reynolds number is 1 and 5 in the upper part and the lowerpart respectively.

20 3.2 Results
Influence of Walls
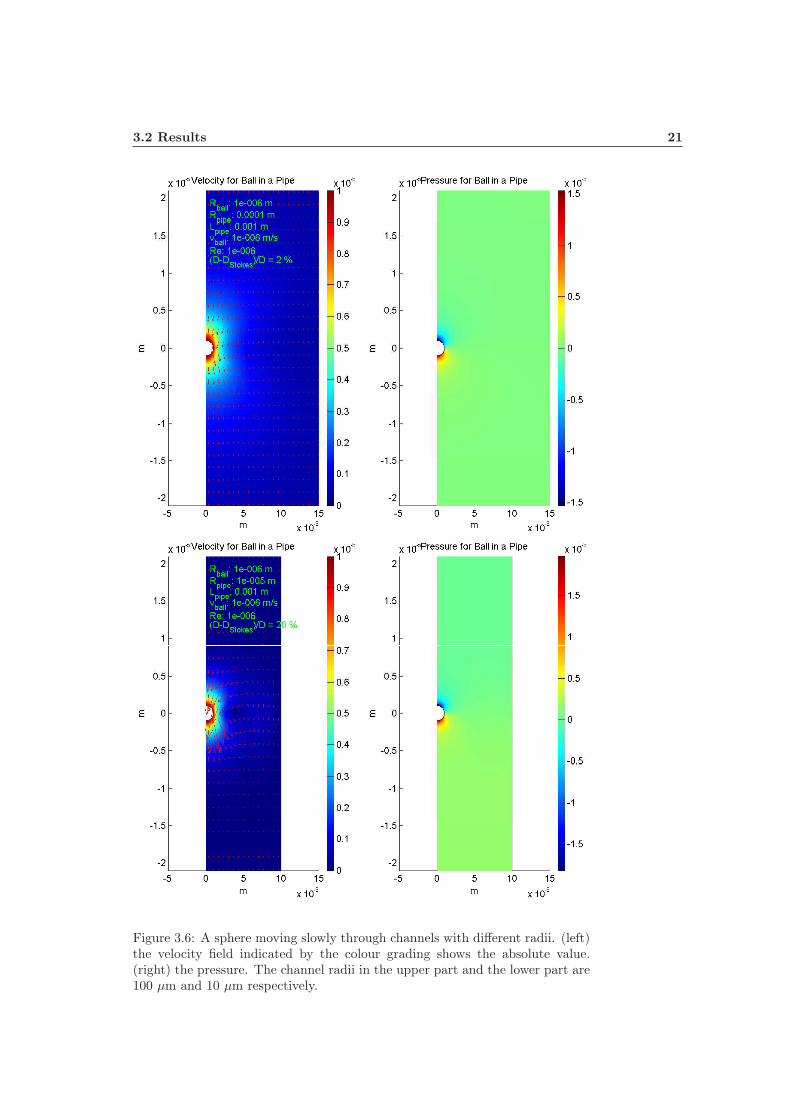
Figs. 3.6 and 3.7 shows the effect of walls on the drag and flow fields, when thesphere velocity is small. It is obvious that as the channel radius gets smaller, thedeviation of the drag from the Stokes drag becomes increasingly larger. Sincethe fluid is incompressible, the fluid in front of the moving sphere has to getbehind it as it passes. Thus there has to be an area between the sphere andthe wall, where the flow direction is opposite the direction of sphere movement.Since there are no-slip boundary conditions on both the sphere and the wall,the velocity gradient becomes larger when there is less room between the sphereand the wall. This results in larger viscous forces in the fluid and thus the dragincreases above the Stokes drag. As seen in Fig. 3.8 this effect can be ratherlarge. In order for the Stokes drag formula to be correct within 10%, the channelradius must be more than 20 times the sphere radius.
In order to improve the Stokes drag formula for spheres in narrow channels,a double logarithmic plot of the deviation as a function of the ratio of the chan-nel radius and the sphere radius is shown on Fig. 3.9. From the plot a clearlinear dependence is seen. This dependence is given as:
log10
(D − 6πµUa
D
)= 0.30902− 1.0051 log10
(rpipe
rball
)⇔
D ≈ 6πµUa1
1− 2 rball
rpipe
(3.1)
This result is valid within 1% as long as the ratio of the radii (rpipe and rball)is larger than 5. In the lower part of Fig. 3.9 the Stokes drag, the numericallyfound drag, and the approximation in Eq. (3.1) has been plotted as a functionof the radii ratio. The approximation is obviously very poor when the radiiratio approaches 2, since then the approximation goes towards infinity.
3.2 Results 21
Figure 3.6: A sphere moving slowly through channels with different radii. (left)the velocity field indicated by the colour grading shows the absolute value.(right) the pressure. The channel radii in the upper part and the lower part are100 µm and 10 µm respectively.

22 3.2 Results
Figure 3.7: A sphere moving slowly through channels with different radii. (left)the velocity field indicated by the colour grading shows the absolute value.(right) the pressure. The channel radii in the upper part and the lower part are5 µm and 2 µm respectively.

3.2 Results 23
2 4 6 8 10 12 14 16 18 200
10
20
30
40
50
60
70
80
90
100
relative pipe radius rpipe
/rball
devi
atio
n in
%
Deviation from Stokes Drag
Figure 3.8: The deviation of the Stokes drag from the numerically calculatedvalue, as a function of channel radius. The sphere radius is 1 µm and the velocityis 10 µm/s.

24 3.2 Results
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2−1.8
−1.6
−1.4
−1.2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
log10
(rpipe
/rball
)
log 10
(Dev
iatio
n in
dra
g)
<− log10
(Deviation) = 0.30902−1.0051log10
(rpipe
/rball
)
Numerically foundLinear regression
0 10 20 30 40 50 60 70 80 90 1000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
rpipe
/rball
Dra
g/pN
Corrected dragNumerically found dragStokes drag
Figure 3.9: (upper) logarithmic plot of the relative deviation as a function ofthe ratio of the channel radius and the sphere radius. (lower) Stokes drag, thenumerically found drag and the approximation in Eq. (3.1) as a function of theradii ratio rpipe
rball.
Chapter 4Conclusion
We have successfully and thoroughly derived the known results of Stokes drag,as well as the Oseen correction to this formula. To determine the validity scopeof the Stokes drag formula, we have used FEMLAB to solve the Navier-Stokesequation analytically for cylindrical channels of varying radii.
As expected, the analytical velocity fields deviates substantially from the nu-merically calculated fields in the far region. The Oseen correction is a slightimprovement to this fact, but remains invalid far from the sphere.
The numerical computations have shown a significant deviation from the Stokesdrag when channel radii are smaller than 20 times the sphere radius. For radiiabove this threshold, the Stokes drag is within 10% of the numerical value. Onthe other hand, for microfluidic systems, the velocity dependence of the drag iswell approximated by the Stokes drag formula. No significant deviation fromthis was noted for sphere velocities below 1m/s. Thus for microfluidic systems,the channel radius is the essential parameter for the validity of the Stokes drag.
A basic rule of thumb for calculating the drag for small channel radii and smallReynolds numbers has been derived. This formula is valid within 1% for radiiratios as small as 5.

26

Bibliography
[1] Laurits Højgaard Olesen Computational Fluid Dynamics in MicrofluidicSystems, Master Thesis MIC, 2003
[2] M. Van Dyke Pertubation Methods in Fluid Mechanics, The ParabolicPress, Stanford, Calif, 1975
[3] Bird, Armstrong and Hassager Dynamics of Polymeric Liquids, John Wi-ley and Sons Inc., 1987

28 BIBLIOGRAPHY
Appendix AFEMLAB Scripts
A.1 calcDrag.m
%--------------------------------------------------------------------% FEMLAB Model M-file% calcDrag.m%% Script for calculating the total drag on a sphere in a cylindrical% channel, as a function of channel radius and sphere velocity.%% NOTE : Requires additional M-file setAppMode.m%% Data is output in matrices:%% radiusData - single-row matrix of radius iteration points% velocityData - single-row matrix of velocity iteration points% stokesDragData - matrix of Stokes drag data sorted as% (velocity, radius)% dragData - matrix of numerically calculated drag data sorted as% (velocity, radius)%% Developed by Jeppe Gavnholt, Mads Brøkner Christiansen,% Jesper Pedersen, Christian Kallesøe and Joachim A. Furst%--------------------------------------------------------------------
% Initialize FEMLABclearflclear femtime = 0;
% Femlab versionclear vrsn

30 A.1 calcDrag.m
vrsn.name = ’FEMLAB 3.0’;vrsn.ext = ’a’;vrsn.major = 0;vrsn.build = 228;vrsn.rcs = ’$Name: $’;vrsn.date = ’$Date: 2004/04/05 18:04:31 $’;fem.version = vrsn;
%--------------------------------------------------------------% INITIAL CONSTANTS AND ITERATION STEPS%--------------------------------------------------------------rho0=1000; eta0=1e-3; % Values for density and viscosity of waterkanallangde=1e-4; % Length of the channel set to be 100 times
% the sphere radiuskugleradius=1e-6; % Sphere radius 1 micronradiusMin = 2e-6; % Initial radius of the channelradiusMax = 1e-4; % Final radius of the channelradiusPoints = 100; % Number of iterations between initial and
% final radiusif radiusPoints == 1
radiusInc = 0;else
radiusInc = (radiusMax-radiusMin)/(radiusPoints-1);end;usideMin = 1e-5; % Initial sphere velocityusideMax = 1e-2; % Final sphere velocityusidePoints = 100; % Number of iterations between initial and
% final velocityif usidePoints == 1
usideInc = 0;else
usideInc = (usideMax-usideMin)/(usidePoints-1);end;
%--------------------------------------------------------------% LOOP WHILE INCREASING CHANNEL RADIUS AND SPHERE VELOCITY%--------------------------------------------------------------radius = radiusMin;velocity = usideMin;
%--- channel radius loop start ---
for rpoint = 1: 1: radiusPoints% Set constants in FEMLABkanalradius=radius;uside = velocity;fem.const=’uside’,uside,’eta0’,eta0,’rho0’,rho0;tic;
%--------------------------------------------------------------% Calculate initial solution for fixed geometry velocity loop

A.1 calcDrag.m 31
%--------------------------------------------------------------%----------------------------------------------------------------% Initialize geometry in FEMLAB%----------------------------------------------------------------g1=rect2(kanalradius,kanallangde,’base’,’corner’,’pos’,[0,-kanallangde/2]);g2=ellip2(kugleradius,kugleradius,’base’,’center’,’pos’,[0,0]);g3=geomcomp(g1,g2,’ns’,’g1’,’g2’,’sf’,’g1-g2’,’edge’,’none’);clear ss.objs=g3;s.name=’CO1’;s.tags=’g3’;
fem.draw=struct(’s’,s);fem.geom=geomcsg(fem);
% Initialize meshfem.mesh=meshinit(fem);% Refine mesh around the spherefem.mesh=meshrefine(fem, ...
’boxcoord’,[0 3*kugleradius -3*kugleradius 3*kugleradius], ...’rmethod’,’regular’);
% Load the axis-symmetric incompressible Navier-Stokes FEMLAB modelsetAppMode;% Calculate solution from scratchfem.sol=femnlin(fem, ...
’solcomp’,’u’,’p’,’v’, ...’outcomp’,’u’,’p’,’v’, ...’nonlin’,’on’);
% Save solution for initial condition of next iterationfem0=fem;time=toc;
%--- sphere velocity loop start ---
for upoint = 1: 1: usidePoints
% Print current point info and calculating time in MatLab command windowdisp(strcat(’rpoint:’,num2str(rpoint), ’/’, num2str(radiusPoints), ’, ...
’, ’upoint:’,num2str(upoint), ’/’,num2str(usidePoints)));disp(strcat(’last iteration time: ’, num2str(time),’s’));disp(strcat(’estimated time remaining: ’, ...
num2str(time*(usidePoints-upoint+usidePoints*...(radiusPoints-rpoint-1))),’s’));
% Set constants in femlabkanalradius=radius;uside = velocity;fem.const=’uside’,uside,’eta0’,eta0,’rho0’,rho0;

32 A.1 calcDrag.m
% Solve problem using previous solution as initial value% except for first veliocity iterationif upoint ~= 1
tic;setAppMode;fem.sol=femnlin(fem, ...
’init’,fem0.sol, ...’solcomp’,’u’,’p’,’v’, ...’outcomp’,’u’,’p’,’v’, ...’nonlin’,’on’);
time=toc;end% Save solution for resolve purposesfem0=fem;
%--------------------------------------------------------------% CALCULATE AND SAVE DATA FOR EACH ITERATION%--------------------------------------------------------------
% Calculate total drag on spheredrag=postint(fem,’-2*pi*r*(T_z_ns)’, ...
’phase’,0*pi/180, ...’edim’,1, ...’intorder’,4, ...’geomnum’,1, ...’dl’,[6,7]);
% Calculate Stokes dragstokesdrag=6*pi*kugleradius*velocity*eta0;% Save datadragData(upoint, rpoint) = drag;stokesdragData(upoint,rpoint) = stokesdrag;radiusData(rpoint) = radius;velocityData(upoint) = velocity;
% Increase velocity for next iterationvelocity=velocity+usideInc;end;%--- sphere velocity loop end ---velocity = usideMin;radius=radius+radiusInc;end;%--- channel radius loop end ---

A.2 setAppMode.m 33
A.2 setAppMode.m
%--------------------------------------------------------------------% FEMLAB Model M-file% setAppMode.m%% Script for initializing incompressible axisymmetric Navier-Stokes% model in FEMLAB%% Developed by Jeppe Gavnholt, Mads Brøkner Christiansen,% Jesper Pedersen, Christian Kallesøe and Joachim A. Furst%--------------------------------------------------------------------
clear applappl.mode.class = ’FlNavierStokes’;appl.mode.type = ’axi’;appl.assignsuffix = ’_ns’;clear bndbnd.type = ’ax’,’uv’,’out’,’noslip’;bnd.v0 = 0,’uside’,’uside’,0;bnd.ind = [1,2,1,3,2,4,4];appl.bnd = bnd;clear equequ.rho = ’rho0’;equ.eta = ’eta0’;equ.ind = [1];appl.equ = equ;fem.appl1 = appl;fem.sdim = ’r’,’z’;
% Multiphysicsfem=multiphysics(fem);
% Extend meshfem.xmesh=meshextend(fem);







