UNIVERSIDADE FEDERAL DO RECÔNCAVO DA BAHIA
CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
BACHARELADO EM CIÊNCIAS EXATAS E TECNOLÓGICAS
AVALIAÇÃO DA ACURÁCIA ALTIMÉTRICA DE
MAPEAMENTO TOPOGRÁFICO USANDO VANT
WÁLLACE JOHN PEREIRA PEDREIRA
CRUZ DAS ALMAS, 2017.

WÁLLACE JOHN PEREIRA PEDREIRA
AVALIAÇÃO DA ACURÁCIA ALTIMÉTRICA DE
MAPEAMENTO TOPOGRÁFICO USANDO VANT
Trabalho de conclusão de curso
apresentado à Universidade Federal do
Recôncavo da Bahia como parte dos requisitos
para obtenção do título de Bacharel em Ciências
Exatas e Tecnológicas.
Orientador: Prof. Dr. Joanito de Andrade Oliveira
CRUZ DAS ALMAS, 2017.

UNIVERSIDADE FEDERAL DO RECÔNCAVO DA BAHIA
CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
BACHARELADO EM CIÊNCIAS EXATAS E TECNOLÓGICAS
AVALIAÇÃO DA ACURÁCIA ALTIMÉTRICA DE
MAPEAMENTO TOPOGRÁFICO USANDO VANT
WÁLLACE JOHN PEREIRA PEDREIRA
Trabalho de Conclusão de Curso aprovado em 08/05/2017 como requisito parcial para
obtenção do grau de Bacharel em Ciências Exatas e Tecnológicas no curso de Bacharelado em
Ciências Exatas e Tecnológicas da Universidade Federal do Recôncavo da Bahia.
EXAMINADORES:
_________________________________________________
Prof .Dr. Joanito Andrade Oliveira - Orientador
Universidade Federal do Recôncavo da Bahia - UFRB
_________________________________________________
Prof .Dr. Francisco Adriano de Carvalho Pereira.
Universidade Federal do Recôncavo da Bahia - UFRB
_________________________________________________
Prof. Dr. Mário Sérgio de Souza Almeida.
Universidade Federal do Recôncavo da - UFRB
CRUZ DAS ALMAS, 2017.

AGRADECIMENTOS
A Deus, por tudo.
A minha mãe Marinalde Andrade Pereira pela educação, incentivo e amor
incondicional.
Ao meu orientador Prof. Dr. Joanito de Andrade Oliveira pela sua dedicação,
paciência e ensinamentos passados durante todo o projeto.
Ao Prof. Dr. Francisco Adriano pela colaboração durante o projeto.
A toda a minha família que sempre mim apoiou.
A minha namorada Rose Costa, por toda força.
Aos meus amigos, pelo companheirismo e ajuda, em especial a Adalberto Oliveira
e Jailson Oliveira.
Aos colegas José Antônio dos Santos Pereira e Robson Pereira pela ajuda nos
trabalhos de campo.
Aos colegas da Residência Universitária Hospital.
Aos amigos Viviane Pedreira e Victor Emanuel, toda gratidão.
Aos funcionários do Restaurante Universitário.
Aos senhores Eliezer Ribeiro e José Fercundes de Freitas Filho, por terem mim
iniciado na Agrimensura.
A Universidade Federal do Recôncavo da Bahia, pelo ensino e formação
acadêmica.

EPÍGRAFE
“Vence o medo e vencerás a morte”
Alexandre o Grande.

RESUMO
A utilização dos veículos aéreos não tripulados (VANT) para obtenção de dados topográficos
é uma alternativa eficaz na produção de dados espaciais. Os levantamentos topográficos usando
VANT reduzem custos e o tempo quando comparado com os métodos tradicionais de
representação da superfície física em meio digital. Os avanços tecnológicos voltados para o
desenvolvimento dos VANTs, aplicados na extração de informações geoespacias através de
levantamentos aerofotogramétricos, demonstram ser uma ferramenta para a produção de
modelos digitais de elevação (MDE). A qualidade das informações métricas dos MDE depende
do tipo de levantamento e das metodologias de processamento. A precisão do modelo depende
da qualidade posicional dos pontos de controle de solo estabelecidos por sistema de
posicionamento global por satélite (GNSS RTK). Deste modo, métodos de controle de
qualidade cartográfica devem ser utilizados para determinar a acurácia dos levantamentos
obtidos que servirão como bases de dados espaciais. Neste trabalho, os métodos do PEC-PCD
(Padrão de Exatidão Cartográfica para Produtos Cartográficos Digitais) e o NSSDA (Nacional
Standard for Spatial Data Accuracy) foram utilizados para avaliar a acurácia vertical do modelo
digital de elevação produzido por VANT. Utilizou-se pontos de teste com precisão média
vertical de 0,009m, em três diferentes classes de declividade do solo. Através de procedimentos
aerofotogramétricos obteve um MDE com 3,24 cm/pixel de GSD, o qual foi classificado na
Classe A do PEC-PCD para uma escala usual de 1:1000 (equidistância vertical de 1m conforme
ET-ADGV), nas três faixas de declividades analisadas. Quanto ao NSSDA os valores de
acurácia obtidos nas classes de declividade foram: 0,156;0,131 e 0,125 m .As classes analisadas
não apresentaram diferenças expressivas quando comparadas entre si. Assim, o MDE gerado
por técnicas de fotogrametria de VANT possui natureza cadastral, visto a classificação de uso
quanto a escala de mapeamento.
Palavras-chave: VANT, GNSS RTK, MDE, Fotogrametria, Precisão Altimétrica.

ABSTRACT
The use of UAVs to obtain topographic data is an efficient alternative in the production
of spatial data. Topographic surveys using UAVs reduce costs and time when compared to
traditional methods of representing physical surface in digital medium. Topographic surveys
using UAVs reduce costs and time when compared to traditional methods of representing
physical surface in digital medium. The technological advances aimed at the development of
the UAVs, applied in the extraction of geospatial information through aerophotogrammetric
surveys, prove to be a tool for the production of digital elevation models (MDE). The quality
of the MDE metric information depends on the type of survey and the processing
methodologies. The accuracy of the model depends on the positional quality of the soil control
points established by the global satellite positioning system (GNSS RTK). Thus, cartographic
quality control methods should be used to determine the accuracy of the surveys obtained that
will serve as spatial databases. In this work, the PEC-PCD (Cartographic Accuracy Standard
for Digital Cartographic Products) and NSSDA (National Standard for Spatial Data Accuracy)
methods were used to evaluate the vertical accuracy of the digital elevation model produced by
UAV. Test points with mean vertical accuracy of 0.009m were used in three different classes
of soil slope. Aerofotogrammetric procedures obtained a MDE with 3.24 cm / pixel GSD, which
was classified in Class A of the PEC-PCD for a usual scale of 1: 1000 (vertical equidistance of
1m according to ET-ADGV), in the three bands Of slopes analyzed. As for the NSSDA, the
accuracy values obtained in the slope classes were: 0.156, 0.131 and 0.125 m. The analyzed
classes did not present expressive differences when compared to each other. Thus, the MDE
generated by VAN photogrammetry techniques has a cadastral nature, considering the use
classification as the mapping scale.
Key words: UAV, GNSS RTK, DEM ,Photogrammetry, Altimetric Accuracy.

SUMÁRIO
1 INTRODUÇÃO E OBJETIVOS .......................................................................... 1
1.1 Considerações Iniciais ................................................................................................. 1
1.2 Objetivos ..................................................................................................................... 2
2 FUNDAMENTAÇÃO TEÓRICA’ ....................................................................... 4
2.1 História e divisões da Agrimensura............................................................................. 4
2.2 Topografia ................................................................................................................... 4
2.3 Geodésia Espacial ....................................................................................................... 5
2.4 Sensoriamento Remoto (SR) ....................................................................................... 7
2.5 Veículos aéreos não tripulados (VANT) ..................................................................... 9
2.6 Pontos de controle: .................................................................................................... 14
2.7 Orientação fotogramétrica: ........................................................................................ 15
2.8 Modelo Digital de Elevação ...................................................................................... 17
2.9 .Análise de Exatidão Cartográfica ............................................................................. 18
2.9.1 Padrões de Exatidão Cartográfica ........................................................................ 18
2.9.2 NSSDA: - Nacional Standard for Spatial Data Accuracy ........................................ 20
3 MATERIAIS E MÉTODOS: .............................................................................. 21
3.1 Área de estudo: .......................................................................................................... 22
3.2 Marcos de referência (materialização dos pontos de controle) ................................. 23
3.3 Base Geodésica de Referência .................................................................................. 24
3.4 Implantação dos alvos (Sinalização do Voo): ........................................................... 25
3.5 Rastreio dos pontos de controle e pontos de teste ..................................................... 27
3.6 Processamento dos pontos coletados ......................................................................... 28
3.7 Planejamento da Missão e Recobrimento Aerofotogramétrico ................................. 29
3.8 Geração do Modelo Digital de Elevação ................................................................... 30
3.9 Análise da acurácia altimétrica do MDE ................................................................... 33
4 RESULTADOS E DISCUSSÕES: ...................................................................... 37
5 CONCLUSÃO: ..................................................................................................... 43
5.1 Sugestões para trabalhos futuros: .............................................................................. 43
6 REFERÊNCIAS BIBLIOGRÁFICAS: .............................................................. 45

LISTA DE ABREVIAÇÕES E SIGLAS
ANAC Agência Nacional de Aviação Civil.
EDGV Estruturação de Dados Geoespaciais Vetoriais.
EMQ Erro Quadrado Médio .
ET-AGVD Especificação Técnica para Aquisição de Dados Vetoriais.
FGDC Federal Geographic Data Commitee
GNSS Global Navigation Satellite System.
GSD Ground Sample Distance
IBGE Instituto Brasileiro de Geografia e Estatística.
MDE Modelo Digital de Elevação.
MDT Modelo Digital do Terreno .
NAVSTAR – GPS Navigation Satellite with Timing na Racing – Global Positioning System
NOAA National Oceânicos and Atmospheric Administration.
NSSDA Nacional Standard for Spatial Data Accuracy.
PEC Padrão de Exatidão Cartográfico.
PEC-PCD Padrão de Exatidão Cartográfico para Produtos Cartográficos Digitais.
RBMC Rede Brasileira de Monitoramento Contínuo.
RMSE Erro Quadrático Médio
RPA Aeronave Remotamente Pilotada.
RTK Real Time Kinematic.
SGB Serviço Geodésico Brasileiro.
SR Sensoriamento Remoto.
TBC Trimble Business Center.
TIN Triangular Irregular Network
VANT Veículos Aéreos não Tripulados.
WGS 84 Word Geodetic System 1984
´

1 INTRODUÇÃO E OBJETIVOS
1.1 Considerações Iniciais
Com o intuito de determinar acidentes geográficos naturais e artificiais, a cada dia é
crescente a demanda por dados oriundos de levantamentos topográficos. Segundo Pinto (1989)
a topografia é a ciência que trata da medição e descrição de regiões da superfície terrestre.
Etimologicamente, topografia significa a descrição do lugar (do grego, Topos = lugar, Graphen
= descrição).
Os levantamentos topográficos são de fundamental importância em projetos e obras de
engenharia (Silva e Segantine, 2015). A qualidade dos dados topográficos depende dos
equipamentos e métodos aplicados na obtenção das informações topográfica. Nas últimas
décadas, o uso da tecnologia GNSS (Global Navigation Satellite System) está sendo utilizada
nos trabalhos de topografia terrestres e levantamentos aéreos ou espaciais, para obter dados de
alta qualidade posicional. Essa tecnologia também é importante na obtenção dos pontos de
controle na aerofotogrametria, propiciando a orientação absoluta do modelo e o aumento da
acurácia.
Os avanços tecnológicos voltados para o desenvolvimento dos veículos aéreos não
tripulados (VANT), aplicados na extração de informações geoespacias através de
levantamentos aerofotogramétricos, têm proporcionado uma ferramenta muito eficaz para a
produção de modelos digitais de elevação (MDE). A qualidade das informações métricas dos
MDEs depende do tipo de levantamento e das metodologias de processamento. Deste modo,
métodos de controle de qualidade cartográfica devem ser utilizados para determinar a precisão
e exatidão dos levantamentos que servirão como bases de dados espaciais.
A legislação nacional vigente que regulamenta as normas técnicas para a cartografia,
por meio do DECRETO Nº 89.817 DE 20 DE JUNHO DE 1984, estabelece o Padrão de
Exatidão Cartográfico (PEC), como um índice que a avalia a acurácia de produtos cartográficos
(BRASIL,1984). A partir de 2008, órgãos do sistema cartográfico nacional iniciaram a
produção da Estruturação de Dados Geoespaciais Vetoriais, denominada de EDGV 2.0, a qual,
após aperfeiçoamentos, resultou na versão 2.1.3 em 2010 (CONCAR, 2010).

A EDGV traz uma nova abordagem no procedimento da análise de qualidade dos dados
cartográficos digitais, alterando os dispositivos de classificação existentes no Decreto
Nº89.817/1984. Outro fator importante é a criação da Especificação Técnica para a Aquisição
de Dados Geoespaciais Vetoriais (ET-ADGV) (DSG, 2011), a qual apresenta os requisitos para
a aquisição do atributo geométrico dos objetos definidos na ET-EDGV (CONCAR, 2010). A
ET-ADGV também disponibiliza as orientações quanto ao Padrão de Exatidão Cartográfica
(PEC) a serem aplicadas nos produtos cartográficos digitais (PEC-PCD).
Outro método similar ao PEC é o NSSDA (Nacional Standard for Spatial Data
Accuracy), implementado pelo órgão americano Federal Geographic Data Commitee (FGDC,
1998). O NSSDA propõe uma metodologia estatística para estimar a acurácia posicional de
cartas topográficas, comparando as coordenadas dos pontos identificados na carta, com os
pontos homólogos em campo (PREOSCK; MITISHITA; ANTUNES, 2008). Assim, ambos os
métodos avaliam a qualidade posicional dos dados provenientes de levantamento topográficos
e geodésicos.
1.2 Objetivos
O objetivo do presente trabalho é avaliar a qualidade do modelo digital de elevação
(MDE) gerado por técnicas de fotogrametria de VANT e demonstrar as possibilidades de
aplicação para a coleta de dados altimétricos de precisão.
1.2.1 Objetivos Específicos
Ao longo da elaboração deste trabalho foi necessário aplicar procedimentos que
possibilitassem a extração de informações de controle, a aplicação dos testes e análises dos
resultados para os métodos de precisão altimétrica.
Dentre as atividades destacam-se:
Usar o posicionamento global por Real Time Kinematic (RTK) na obtenção de pontos
de controle.
Utilizar os métodos aplicados na análise de acurácia cartográfica, PEC-Padrão de
Exatidão Cartográfica e NSSDA (Nacional Standard for Data Accuracy);

Analisar a precisão cartográfica em diferentes classes de declividades.

2 FUNDAMENTAÇÃO TEÓRICA
2.1 História e divisões da Agrimensura
Desde a antiguidade as civilizações constroem grandes obras como: aquedutos, pontes
e pirâmides. Operações topográficas sempre foram de fundamental importância para os
arquitetos e engenheiros. Calcular distância, estimar áreas, parcelar solos, traçar estradas e rotas
são aplicações da agrimensura.
Nos dias atuais, a agrimensura utiliza conhecimentos da geomática, como parte da
obtenção e gerenciamento de dados espaciais. Os engenheiros agrimensores usam
equipamentos e imagens para obter informações do espaço geográfico, úteis para projetar
loteamentos, realizar cálculos de volumes de corte e aterro. Os teodolitos, as estações totais, os
receptores GNSS são os principais equipamentos utilizados na aquisição de dados espaciais. As
estações totais e os GNSS continuam a ser os equipamentos mais comumente aplicados em
obras de engenharia.
Os avanços tecnológicos nas áreas de sensoriamento remoto, processamento digital de
imagens e sistema de informação geográfica foi determinante para as atualizações dos métodos
e procedimentos de aquisição, armazenamento e processamento das informações espaciais.
Assim, as atividades e atribuições dos profissionais da agrimensura ganharam uma amplitude
de aplicações, não só na extração dos dados topográficos, mas em toda linha da produção
cartográfica.
2.2 Topografia
Os levantamentos topográficos podem ser espaciais, aéreos e terrestres, devendo ser
precisos para que garantam a confiança na tomada de decisões em projetos de engenharia.
Quanto as classificações destes levantamentos podem ser classificados em planimétricos,
altimétricos e planialtimétricos.
Os levantamentos planimétricos representam a projeção da superfície em um plano,
denominado plano topográfico. Os levantamentos altimétricos buscam representar os desníveis
do terreno. Os trabalhos que envolvem a aquisição de informações planimétricas e altimétricas
são denominados de levantamentos planialmétricos. Com a evolução dos equipamentos e

métodos topográficos tornou-se possível o aumento da precisão no processo de aquisição de
informações espaciais.
Para trabalhos de engenharia, a precisão posicional torna-se essencial para a qualidade
dos projetos, não apenas na etapa de aquisição, mas também nos procedimentos de
processamento e locação. Nas atividades de fiscalização e análise de projetos, as informações
de referência devem ter sempre qualidade posicional superior ao do levantamento executado.
O aperfeiçoamento na descrição da forma da terra favoreceu a utilização da geodésica na
extração de informações topográficas precisas, que dependendo do trabalho, podem ser
aplicadas na etapa de validação posicional de projetos.
2.3 Geodésia Espacial
Segundo Pinto (1989), a geodésia é a medição e representação da superfície da terra.
Assim, a geodesia tem por finalidade mapear grandes superfícies levando em conta a
esfericidade e forma da superfície do planeta. Para o National Oceânicos and Atmospheric
Administration (NOAA) a geodésia é a ciência que mede e compreende com precisão a forma
geométrica da Terra, a orientação no espaço e o campo de gravidade (NOAA, 2017).
A superfície terrestre pode ser representada pelas coordenadas geodésicas latitude,
longitude e altitude ortométrica ou elipsoidal. A geodésia utiliza satélites para obtenção de
medidas de coordenadas de alta precisão (geodésica espacial) .Segundo o IBGE (2015) é
possível conhecer a diferença entre as superfícies do geoide e do elipsóide, isto é, a ondulação
geoidal, para que se possa obter a altitude ortométrica. Desta forma, se faz necessário um
modelo de ondulação geoidal para correções na altitude fornecida pelo receptor GNSS, após
estas correções obtém-se altitudes ortométricas. A figura 1 apresenta a altitude elipsoidal (h),
obtida através de receptores GNSS, a altitude ortométrica (H) e a altura geoidal (N) fornecida
por um modelo de ondulação geoidal.

Figura 1 – Modelo de ondulação geoidal.
(Fonte: IBGE, 2017 1 )
O Sistema Geodésico Brasileiro (SGB), por meio de pontos geodésicos implantados na
porção da superfície terrestre, usa determinados procedimentos operacionais e cálculos de
coordenadas para apoiar levantamentos topográficos. Os sistemas de posicionamento global são
fundamentais nas etapas de aquisição de dados topográficos e coordenadas geodésicas precisas.
O Sistema NAVSTAR-GPS (Navigation Satellite with Timming na Racing-Global Positioning
System) é o sistema de posicionamento por satélites mais utilizado para a realização de um
sistema de referência (BONIFÁCIO et al, 2006). O americano (GPS), O Russo (GLONASS) e
Europeu (Galileo) são exemplos de sistemas de navegação por satélite (GNSS). Os receptores
GNSS abrangem as constelações dos três sistemas. O sistema que mais recebeu investimento
em seu desenvolvimento foi o NAVSTAR- GPS (Navigation Satellite with Timming na Racing-
Global Positioning System) dos Estados Unidos da América (MONICO, 2008).
Existem várias técnicas de posicionamento utilizando GNSS. Conforme o IBGE (2008),
o posicionamento relativo estático utiliza duas antenas. Um desses receptores fica estacionado
em um ponto de coordenadas conhecida (Base), a outra antena móvel (Rover). Outros métodos
de posicionamento são descritos como estático, estático rápido, semi-cinemático e cinemático
(IBGE, 2008). As correções das coordenadas são executadas nas etapas de pós-processamento
ou em tempo real (RTK- Real Time Kinematic). A figura 2 ilustra o posicionamento relativo
utilizando o GNSS RTK.
1 http://www.ibge.gov.br/home/geociencias/geodesia/modelo_geoidal.shtm

Figura 2 – Posicionamento GNSS RTK.
(Fonte: Manual Técnico de Posicionamento INCRA2 )
Assim, vale ressaltar que fatores como condições atmosféricas, distribuição de satélites
no espaço, distância das antenas (Base-Rover) podem influenciar tanto na precisão, quanto no
tempo de coleta dos dados. Um dos cuidados a ser tomado é a linha Base-Rover, que quando o
comprimento for inferior a 10 km, cujos antenas estejam estacionados em locais onde não haja
ocorrência de obstrução do sinal e sob condições ionosféricas razoáveis, 20 minutos são
suficientes para se conseguir solução das ambiguidades (IBGE 2008).
Com o uso da tecnologia GNSS RTK, associado às boas práticas mencionadas, pode-se
obter precisões milimétricas, adquirindo pontos sobre o terreno de forma rápida, que pode ser
utilizados como apoio em levantamentos aerofotogramétricos.
2.4 Sensoriamento Remoto (SR)
Sensoriamento remoto é a ciência de obter informações sobre objetos ou áreas a
distância, normalmente de aeronaves ou satélites (NOAA, 2017). Com base na aquisição de
dados por sensores que são capazes de captar a radiação eletromagnética de alvos terrestre ou
atmosférico, permitindo assim a geração de produtos como imagens. Os níveis de aquisição de
dados de SR dependem da plataforma onde os sensores são transportados (NOVO, 2010):
2 Disponível:https://sigef.incra.gov.br/static/documentos/manual_tecnico_posicionamento_1ed.pdf

Nível de laboratório e campo;
Nível orbital;
Nível de aeronaves.
No nível de aeronaves ou plataforma aérea as informações adquiridas são provenientes
do processo de geração das fotografias aéreas. A ciência que trata de adquirir e interpretar as
fotografias áreas é a fotogrametria. Segundo Jensen (2009), a fotogrametria é a arte e a ciência
de realizar medições precisas por meio de fotografias aéreas.
Atualmente, as fotografias áreas são obtidas por câmaras embarcadas em aeronaves de
grande porte ou em veículos aéreos não tripulados (VANT). Rosalen (1997) relata a importância
da fotogrametria em diferentes áreas como: mapeamento, geologia, engenharia agronômica e
florestal, projetos e construção civil, cadastro urbano e rural, arquitetura, arqueologia,
meteorologia, oceanografia, medicina e criminologia.
Por sua tamanha importância a fotogrametria está em constante evolução tecnológica.
Os avanços mais intensos da fotogrametria foram na década de 60, pois até a década de 50 os
processos fotogramétricos eram mecânicos, sendo denominara fotogrametria analógica
(FURTADO, 2003).
A revolução da fotogrametria acontece com os avanços da eletrônica, aparecimento de
computadores e o surgimento de restituidores analíticos, permitindo uma orientação de forma
analítica, surge então à fotogrametria Analítica. No início dos anos 80, surge a fotogrametria
digital que tem como base o uso de imagens digitais como fonte primárias de dados. Assim com
possibilidade do uso de fotografias digitais, nos anos noventa houve uma grande utilização da
fotogrametria, impulsionada por avanços no setor de informática que possibilitaram maior
capacidade dos computadores no processamento de imagens digitais, além do avanço de
softwares e scanners (FURTADO, 2003).
Segundo Andrade (1998), os conceitos de fotogrametria mudaram muito com a
fotogrametria de digital, pois com esta se faz necessário associar o de hardwares e softwares. A
fotogrametria digital é fundamentada na utilização de imagens digitais, no armazenamento em
meio magnético e na forma de pixel (FURTADO, 2003).
O formato digital de imagem representa a imagem no formato de matriz ou malha. A
imagem pode ser considerada digital quando cada elemento nela contido pode ser representado
por um valor numérico possibilitando sua localização no espaço (WOLF, 2000).
Segundo Wolf (2000) a fotogrametria pode ser dividida em duas áreas na fotogrametria
métrica e interpretativa. A fotogrametria métrica ainda apresenta a outras divisões:
fotogrametria terrestre, onde câmaras fotográficas ficam localizadas em estações situadas em
campo e a fotogrametria aérea ou aerofotogrametria onde na maioria são usadas aeronaves
tripuladas ou não tripuladas (FURTADO, 2003).
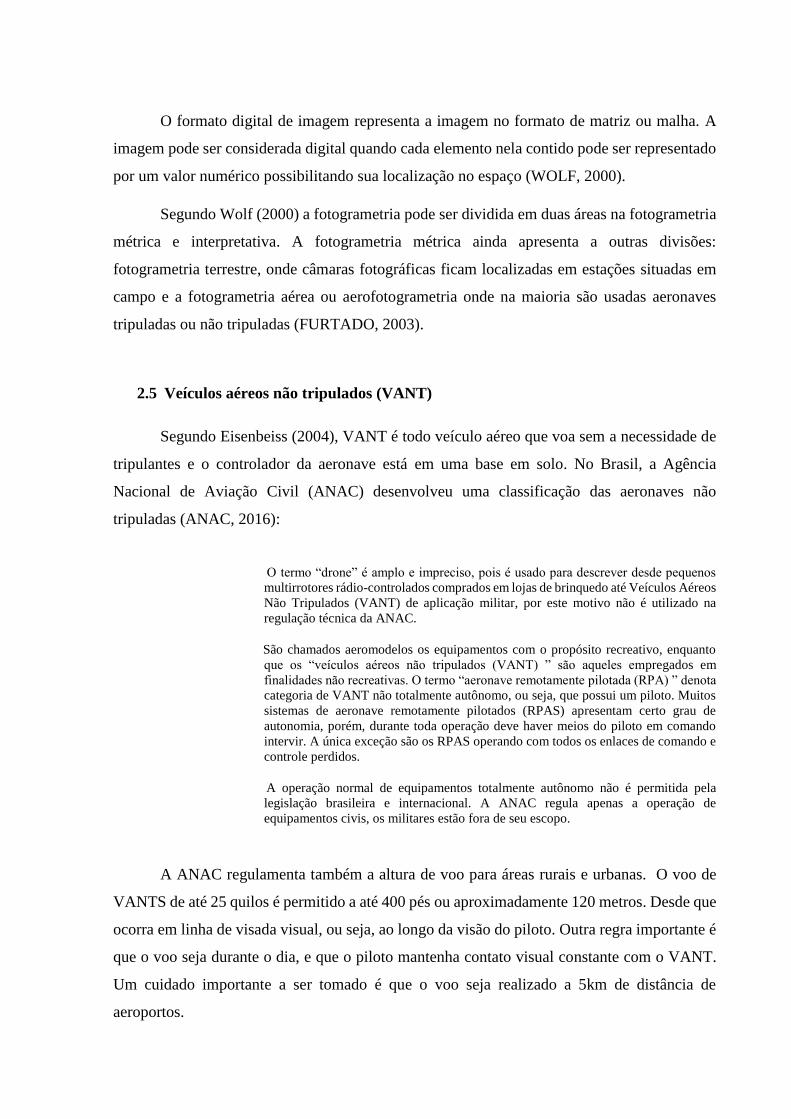
2.5 Veículos aéreos não tripulados (VANT)
Segundo Eisenbeiss (2004), VANT é todo veículo aéreo que voa sem a necessidade de
tripulantes e o controlador da aeronave está em uma base em solo. No Brasil, a Agência
Nacional de Aviação Civil (ANAC) desenvolveu uma classificação das aeronaves não
tripuladas (ANAC, 2016):
O termo “drone” é amplo e impreciso, pois é usado para descrever desde pequenos
multirrotores rádio-controlados comprados em lojas de brinquedo até Veículos Aéreos
Não Tripulados (VANT) de aplicação militar, por este motivo não é utilizado na
regulação técnica da ANAC.
São chamados aeromodelos os equipamentos com o propósito recreativo, enquanto
que os “veículos aéreos não tripulados (VANT) ” são aqueles empregados em
finalidades não recreativas. O termo “aeronave remotamente pilotada (RPA) ” denota
categoria de VANT não totalmente autônomo, ou seja, que possui um piloto. Muitos
sistemas de aeronave remotamente pilotados (RPAS) apresentam certo grau de
autonomia, porém, durante toda operação deve haver meios do piloto em comando
intervir. A única exceção são os RPAS operando com todos os enlaces de comando e
controle perdidos.
A operação normal de equipamentos totalmente autônomo não é permitida pela
legislação brasileira e internacional. A ANAC regula apenas a operação de
equipamentos civis, os militares estão fora de seu escopo.
A ANAC regulamenta também a altura de voo para áreas rurais e urbanas. O voo de
VANTS de até 25 quilos é permitido a até 400 pés ou aproximadamente 120 metros. Desde que
ocorra em linha de visada visual, ou seja, ao longo da visão do piloto. Outra regra importante é
que o voo seja durante o dia, e que o piloto mantenha contato visual constante com o VANT.
Um cuidado importante a ser tomado é que o voo seja realizado a 5km de distância de
aeroportos.

Apesar da regulamentação tardia o uso de VANT vem se destacando no Brasil, os
primeiros projetos de VANT no país iniciaram a partir de 1980. Porém segundo Medeiros
(2008), foi na década de 90 do século passado, que houve maior avanço e desenvolvimento
desta tecnologia no Brasil. Uso e aplicação de veículo aéreo não tripulado na aerofotogrametria
devem-se principalmente à boa resolução espacial e temporal das fotografias aéreas adquiridas,
oferecendo grande liberdade ao usuário, pois apresenta alta resolução temporal (GALVÃO,
2014).
Para atingir uma boa resolução espacial, os levantamentos por VANT deve ser
precedido de um planejamento de voo ou missão. Criado com base em mapas e informações
cartográficas existentes da área a ser levantada, o plano de voo é traçado em faixas de
sobreposição de imagens sequenciais, onde 30 a 40 % lateralmente e 60 a 80%
longitudinalmente (figuras 3 e 4). Quanto maior a sobreposição, maior a qualidade dos produtos
cartográficos finais (HORUS AERONAVES,2016).
Figura 3 – Sobreposição lateral
Fonte: Santos e Dias (2011)

Figura 4 – Sobreposição longitudinal
Fonte: Santos e Dias (2011)
Outros fatores que devem ser levados em consideração são a atitude da aeronave e a
altura de voo. A atitude está relacionada aos ângulos em relação aos eixos da aeronave devido
a sua instabilidade (figura 5) (HORUS AERONAVES, 2016). Qualquer inclinação em relação
a esses eixos (X0, Y0 e Z0), influencia diretamente nas inclinações nas fotografias capturadas
por câmara embarcadas na plataforma do VANT, conforme a figura 6.
Figura 5 – Eixos da Roll (φ), Pitch (ω) e Y (κ) da aeronave.
Fonte: A Fotogrametria aérea como ferramenta na
restituição de paisagens submersas por albufeiras3.
3,4 . Disponível: http://enggeoespacial.fc.ul.pt/ficheiros/teses/tese_mario_filipe.pdf

Figura 6 – Inclinação da fotografia em relação aos eixos x0, y0 e z0 da aeronave.
Fonte: A Fotogrametria aérea como ferramenta na
restituição de paisagens submersas por albufeiras4.
Uma maneira de minimizar esta inclinação é o uso de um sistema inercial para
compensar inclinações nos três eixos do VANT durante o voo (HORUS AERONAVES,2016).
A altura do voo e qualidade da câmera influenciam na qualidade dos levantamentos
aerofotogramétricos, e estão diretamente ligados ao GSD (Ground Sample Distance) e
autonomia da bateria (figura 7). Assim quanto menor GSD, maior será a resolução espacial da
imagem. Porém, mesmo em um voo de altura constante pode ser obtido valores de GSD
diferentes. Para haver uma compensação, os algoritmos dos softwares utilizam um GSD médio
no processamento dos dados (HORUS AERONAVES, 2016).
3,4 . Disponível: http://enggeoespacial.fc.ul.pt/ficheiros/teses/tese_mario_filipe.pdf

Figura 7 – Esquema da fotografia aérea(Altura do voo).
Fonte: Oliveira (2008)
Assim, com intuito de atender todas essas exigências, existem uma grande diversidade
de modelo de VANT no mercado que são classificados em dois tipos: multirotores e VANT de
asa fixa. Os VANTs multirotores possuem decolagem e pouso vertical (figura 8). Já os VANTs
de asa fixa possuem maior autonomia de voo, porém apresentam maior dificuldade no pouso e
decolagem (figura 9) (HORUS AERONAVES, 2016).
Figura 8. VANT multirotor.
Fonte: Aerofotogrametria com Drones- Horus Aeronaves.

Figura 9. VANT multirotor
Fonte: Aerofotogrametria com Drones- Horus Aeronaves.
A escolha da aeronave, os sensores nela embarcados e as características do voo são de
fundamental importância para obter uma acurácia geométrica das fotografias. Uma outra
maneira de elevar as precisões cartográficas em levantamento aerofotogramétrico usando
VANT é o uso de pontos de controle, aumentando assim a acurácia do levantamento (HORUS
AERONAVES,2016).
2.6 Pontos de controle:
Na concepção do projeto de mapeamento com uso de fotogrametria, o processo de
aquisição dos pontos de controle (pontos fotoindentificáveis) de coordenadas conhecida é
essencial para definir a qualidade dos dados produzidos (ROSALEN, 1997 apud GALVÃO,
2014). Os pontos de controle devem estar localizados na área a ser mapeada ou em toda área de
cobertura do levantamento ou área de recobrimento. A aquisição desses pontos de controle é
realizada por meio da geodesia espacial, isto é, com o uso do sistema de posicionamento GNSS
(Global Navigation Satelite System). Uma tecnologia eficaz na aquisição dos pontos de controle
é GNSS RTK, por apresentar alta qualidade posicional e agilidade na aquisição das informações
espaciais.
Os pontos de controle podem ser classificados em naturais e artificiais. Exemplos de
pontos de controle naturais são calhas, faixas e edificações; visíveis nas imagens. Pontos de
controle artificiais são materializados por marcos ou piquetes e identificados por meio de alvos

sinalizadores (figura 10 e 11). Esses pontos são utilizados para o georreferenciamento das
imagens aéreas e na orientação absoluta do modelo estereoscópico (GALVÃO, 2014).
Figura 10. Ponto de controle na forma de marco ou estação geodésica.
Figura 11. Modelos de alvos sinalizadores.
Fonte: (Boeing; Vitalis; Caten, 2014)
2.7 Orientação fotogramétrica:
A orientação fotogramétrica tem como objetivo ajustar a escala e posicionar as
fotografias na mesma posição em que foram coletadas (GALVÃO, 2014). Esta etapa consiste
no alinhamento das imagens.
Segundo Rosalen (1997), o processo de orientação pode ser dividido em três etapas:
orientação interna ou interior, a orientação relativa e a orientação absoluta. Para Galvão (2014),

a orientação relativa, recebe essa denominação, pois estabelece a posição relativa dos pontos
entre as fotos. Esta orientação é obtida a partir do alinhamento das imagens e busca por pontos
homólogos das fotografias sobreposta das mesmas, que são obtidas no levantamento
fotogramétrico. Importante salientar que a visão estereoscópica é gerada a partir da
sobreposição das imagens, fazendo com quer os raios luminosos dos pontos homólogos se
encontrem em único ponto.
Já o processo de orientação interna consiste em criar “a geometria interna da câmera
aérea no restituidor”, alinhando o centro da lente da câmera ao centro da imagem fotográfica
(GALVÃO, 2014). Segundo Sato (2003), o processo de orientação absoluta consiste no
georreferenciamento do modelo tridimensional do terreno.
As tecnologias atuais através de softwares específicos permitem, através de blocos de
imagens, a orientação relativa e absoluta quase que simultaneamente no processamento. O
processo faz-se necessário o uso de pontos de controle, identificando-os nas fotografias e
atribuindo as coordenadas coletas pelo GNSS em campo. Essas etapas são de fundamental
importância na confecção de modelos numéricos digitais de superfície e mosaicos de imagens.

2.8 Modelo Digital de Elevação
Os pontos de controle no terreno incorporado na orientação exterior e a aerotriangulação
possibilitam atribuir uma elevação a cada par conjugado de pixels (GALVÃO, 2014). A
informação de elevação pode ser extraída a partir do modelo estéreo triangulado. Na
fotogrametria digital (FD), os programas realizam automaticamente a estereocorrelação em
porções ortorretificadas das imagens e calcula a paralaxe associada a cada novo ponto no
modelo estéreo. Assim, na FD é possível visualizar a grade de pontos de elevação de um modelo
digital de elevação.
O modelo digital de elevação (MDE) é um modelo matemático que representa de uma
forma contínua a superfície topográfica (FURTADO, 2003). Os modelos digitais de superfície
assim como as ortofotos são uns principais produtos cartográficos gerados por levantamentos
aerofotogramétricos. Os MDE representam a superfície e outros objetos sobre o terreno (i.e,
vegetação, edificações, etc). Já o modelo digital do terreno (MDT) leva em consideração apenas
as informações da superfície do terreno (JENSEN, 2009).
Para geração desses modelos existem duas estruturas de Modelos Numéricos do Terreno
(MNT): a malha retangular e a rede triangular irregular (TIN - Triangular Irregular Network)
(GONÇALVES & FERNANDES 1996 apud FURTADO, 2003).
A geração de Modelos Digitais de Elevação fornece vários tipos de analises úteis no
geoprocessamento. As análises de modelos digitais possibilitam calcular, por exemplo:
volumes de corte e aterro, que são de fundamental importância a engenharia civil e engenharia
de minas. Outra possibilidade é geração de mapas de drenagem, curvas de níveis. Os MDE
podem ser aplicados também no planejamento rural e urbano, mapeamento e monitoramento
ambiental e de áreas de risco. Assim pela sua importância, o controle de qualidade é de grande
importância, para os produtos gerados.
2.9 .Análise de Exatidão Cartográfica
2.9.1 Padrões de Exatidão Cartográfica
A produção de informações espaciais é uma etapa importante nos trabalhos que deseja
espacializar os dados de análises. Com os avanços no desenvolvimento de equipamentos de
maior grau de precisão e métodos de processamento de informações cartográficas, cresce a
necessidade de avaliar a qualidade posicional (planimétrica e altimétrica) dos levantamentos
executados na etapa de aquisição de dados.
A precisão de um mapa é a probabilidade de uma posição de um ponto ser verdadeira,
quando comparados com métodos tidos como mais precisos. A exatidão de um mapa é
comparação das coordenadas (x, y, z) do terreno com as coordenadas do mapa. O PEC (Padrão
de Exatidão Cartográfico), definido na legislação cartográfica em vigor, regulamenta as normas
técnicas para a cartografia nacional, por meio do DECRETO Nº 89.817 DE 20 DE JUNHO DE
1984. Esta norma versa sobre especificações técnicas para Cartografia Nacional. Com atenção
para capitulo I para os artigos Art. 2°, Art. 5° e para o capítulo II para o Art. 8°.
Art.2°
As Instruções Reguladoras das Normas Técnicas da Cartografia Nacional se destinam
a estabelecer procedimentos e padrões a serem obedecidos na elaboração e
apresentação de normas da Cartografia Nacional, bem como padrões mínimos a serem
adotados nas atividades cartográficas.
Art.5º
Para efeito destas Instruções, define-se:
I- Em caráter geral:
1.Serviço Cartográfico ou Natureza Cartográfica – é toda operação de representação
da superfície terrestre ou parte dela, através de imagens, cartas, plantas e outras formas
de expressões afins, tais como definidas no Art.6° do DL 243/67 e seus parágrafos.
2. Atividade Correlata - toda ação, operação ou trabalho destinado a apoiar ou
implementar um serviço cartográfico ou de natureza cartográfica, tal como
mencionado no parágrafo único do art.2° do Decreto-Lei número 243167.
CAPÍTULOII.
Especificações Gerais Seção 1 Classificação de uma Carta Quanto a Exatidão.
Art. 8º
As cartas quando à sua exatidão devem obedecer ao Padrão de Exatidão Cartográfico-
PEC segundo o critério abaixo indicado:

1. Noventa por cento dos pontos bem definidos numa carta, quando testados no
terreno, não deverão apresentar erro superior ao Padrão de Exatidão-Planimétrico-
estabelecido.
2. Noventa por cento dos pontos isolados de altitude, obtidos por interpretação de
curvas-de-nível, quando testados no terreno, não deverão apresentar erro superior ao
Padrão de Exatidão Cartográfico-Altímetro o estabelecido.
§1° Padrão de Exatidão Cartográfica é um indicador estatístico de dispersão relativo
a 90% de probabilidade, que define a exatidão de trabalhos cartográficos.
§2º A probabilidade de 90% a 1,6449 vezes o Erro Padrão-PEC=1,6449EP.
§3º O Erro-Padrão isolado num trabalho cartográfico, não ultrapassará 60,8% do
Padrão de Exatidão Cartográfica.
§4º Para efeito das presentes ilustrações, consideram-se equivalentes as expressões
Erro-Padrão, Desvio-Padrão e Erro-Médio-Quadrático.
Segundo Silva et al. (2016), para produtos cartográficos digitais, a metodologia de
avaliação da acurácia de MDE utiliza análise de tendência e precisão. Os dados recebem uma
classificação de acordo com o Padrão de Exatidão Cartográfica dos Produtos Cartográficos
Digitais (PEC-PCD). As características de análise, como as tolerâncias, foram orientadas e
estabelecidas pela Diretoria de Serviço Geográfico do Exército Brasileiro - DSG (2011) e pela
Especificação Técnica para a Aquisição de Dados Geoespaciais Vetoriais (ET-ADGV).
O PEC-PCD complementa as normas do Decreto nº 89.817/84. Possuindo tolerâncias
específicas para MDEs, sendo o valor previsto para a classe “A” igual a 0,27 da equidistância
do produto cartográfico e o erro-padrão (EP) igual a 1/6 da equidistância do produto. As classes
“B”, “C” e “D” do PEC-PCD correspondem, em ordem, as classes “A”, “B”, “C” do PEC
previstas no Decreto 89.817/84. A tabela 1 apresenta o PEC-PCD para dados altimétricos.
Tabela 1: Padrão de Exatidão Cartográfica Altimétrica dos Pontos Cotados e do MDT, MDE e MDS
para a produção de Produtos Cartográficos Digitais.
O termo acurácia está relacionado a erros sistemáticos e aleatórios das medições
(MONICO et al. ,2009). As avaliações dos efeitos dos erros ocorrem de forma independente.

Segundo Galo & Camargo (1994), um método eficiente de identificação destes erros é por meio
de testes de hipóteses. Para análise de tendências usa-se distribuição t de Student, para verificar
a possível existência de erros sistemáticos. Já a precisão é analisada com base na distribuição
Qui-quadrado, para avaliação erros aleatórios. Os testes devem ser realizados com nível de
significância de α = 10%, tais procedimentos são descritos e realizados por Silva et al. (2016).
O modelo é considerado acurado para uma determinada classe do PEC-PCD, desde que aceita
a hipótese nula da avaliação de tendência e precisão realizada com base nas discrepâncias entre
as altitudes observadas e as altitudes de referência.
2.9.2 NSSDA: - Nacional Standard for Spatial Data Accuracy
Similar ao PEC, o NSSDA foi implementado pelo órgão americano Federal Geographic
Data Commitee-FGDC. Este órgão também propõe uma metodologia estatística para estimar a
acurácia posicional de cartas topográficas, comparando as coordenadas de pontos identificadas
na carta com pontos identificados em campo ou de maior acurácia (PREOSCK et al. ,2008).
Segundo o NSSDA (1998, p.4), o erro médio quadrático-EMQ das discrepâncias entre
as coordenadas da carta e as coordenadas dos pontos que compõe a amostra, serve para avaliar
a acurácia posicional do produto cartográfico final. Com nível de confiança 95% para avaliação
da acurácia, ou seja, 95% dos pontos da amostra deverão ter um erro em sua posição no terreno
menor ou igual ao valor da acurácia obtida no levantamento. O resultado da aplicação do
NSSDA reflete todos os erros e incertezas na fase do levantamento, aerotriangulação e extração
de coordenadas. Para obter o nível de probabilidade, o trabalho de análise deverá conter, no
mínimo, 20 pontos por amostras ou área do projeto a ser analisada. As amostras devem ser
representativas e bem distribuídas na área a ser testada (PREOSCK et al. ,2008).
Para avaliar a presença de tendência, os testes estatísticos utilizam a média da amostra
e o desvio padrão para avaliar a conformidade da precisão. Os testes de hipótese para as
amostras são realizados de maneira separados para as coordenadas X, Y, Z (PREOSCK et al,
2008).

3 MATERIAIS E MÉTODOS:
As etapas para a análise da acurácia do MDE envolvem os levantamentos geodésicos e
fotogramétricos (figura 12). No desenvolvimento das etapas do trabalho foram utilizados os
seguintes equipamentos:
Dois receptores GNSS RTK de fabricação da Timble, modelo R4, dupla frequência,
precisão planimétrica 3,0mm +0,4ppm RMS e altimetria 3,5 mm +0,4 ppm RMS ;
Um receptor GPS de fabricação da Garmin Map 76 CSx;
VANT PHANTOM 4 – PRO;
Software ArcGis-ESRI ®, versão 10.1;
Software Agisoft Photoscan versão 1.2.52680;
Software Google Earth
Computador (Desktop).

Levantamento Geodésico Levantamento Fotogramétrico
Figura 12: Fluxograma das etapas.
3.1 Área de estudo:
A área de estudo está localizada no município de Cruz das Almas, Bahia. A altitude
média da cidade é de 220,00 metros. A área está limitada pelas coordenadas UTM,
N=8.600.306,00m e E=489.731,00m; N=8.600.450,00m e E=490018,00m (datum WGS 84,
zona 24 s) situada no campus da Universidade Federal do Recôncavo da Bahia (UFRB), nas
proximidades do colégio Joaquim Medeiros, com área total de 5 hectares.
A área apresenta feições topográficas favoráveis à pesquisa, com diferentes classes de
declividade. Além disso, está localizada no micro bacia do Córrego do Machado, uma região
importante para estudos relacionados com impactos ambientais. A escolha da área foi
fundamental para a análise dos pontos obtidos na geração de modelos digital de elevação em
diferentes classes de declividade.
Planejamento
Marcos de referência Planejamento da missão
Aquisição
dos
dados
Base geodésica
Recobrimento Sinalização do voo
Rastreio dos pontos
Processamento dos pontos Geração do MDE
Analise da Acurácia

Para a delimitação da área de estudo utilizou-se o GPS de navegação modelo GARMIM
MAP para obter feições do perímetro, valor da área levantada e delimitação digital da área de
estudo (figura 13). Usando as ferramentas de ponto, configurou-se o equipamento no datum
WGS 84 (World Geodetic System 1984). Os pontos foram adquiridos com o maior número de
satélites. Assim, foi possível distribuir os pontos de controle e os pontos de teste, além de
auxiliar o planejamento da missão.
Figura 13.Delimitação da Área de Estudo.
3.2 Marcos de referência (materialização dos pontos de controle)
Foram implantados marcos de referência para materialização dos pontos de controle. Os
marcos utilizados possuem as dimensões descritas nas normas de georreferenciamento de
imóveis rurais do Instituto Nacional de Colonização e Reforma Agrária - (INCRA ,2010). Os
pontos de controle foram dispostos espacialmente utilizando o software Google Earth e locados
em campo com receptor GPS GARMIM Map 76 CSx. Totalizando 11 pontos de controle, sendo
8 materiazados com marcos de cimento (figura 10), os outros três foram aproveitados os bordos
das canaletas (figura 14). Estes pontos foram distribuídos de forma uniforme e estratégica.
Adotou-se critérios espaciais, como a disposição uniforme dos pontos no terreno e a
possibilidade de flutuação do ajuste nas bordas do modelo.
Figura 14.- Canaleta usada como ponto de controle.
3.3 Base Geodésica de Referência
O equipamento GNSS RTK de fabricação da Trimble - R4, foi instalado com objetivo
de permitir melhor cobertura de sinal, em ponto alto, de modo a evitar obstáculos naturais e
artificiais. Dessa forma, a BASE foi implantada no pavimento superior da biblioteca, nas
dependências do campus da UFRB (figura 15). Foram utilizadas as seguintes configurações:
máscara de elevação 10° e uma época equivalendo a um segundo. Utilizou-se o equipamento
BASE com antena interna, pois o sinal apresentou uma boa cobertura no teste que precederam
os trabalhos.
O tempo de ocupação para o transporte de coordenadas foi 3horas e 41 minutos de
rastreio. Após o rastreio, procedeu-se a etapa de pós-processamento e ajuste da base, transporte
de coordenadas. Para tanto, as bases de Bom Jesus da Lapa e Petrolina, da Rede Brasileira de
Monitoramento Continuo (RBMC), foram utilizadas de modo a estabelecer um triângulo
geodésico mais equilátero possível (figura 16), conforme as especificações técnicas. Após o
processamento da base, foram obtidos os resultados de precisões: 0,015m na direção leste;
0,017m na direção norte e 0,022 m na altitude, ao nível de confiança de 95%. Em seguida, as
coordenadas da base foram utilizadas no ajuste dos pontos de controle e teste.

Figura 15 – BASE GNSS RTK instalada no campus da UFRB.
Figura 16 – Ajustamento da Base.
3.4 Implantação dos alvos (Sinalização do Voo):
A sinalização ocorre com a implantação de alvos fotoindentificáveis nos marcos de
referência (figura 18). Desta forma, a implantação de alvos artificiais de boa refletância se fez
necessário na etapa que precede a aquisição das imagens, caracterizando assim um voo pré-
sinalizado.

Figura 18 –Alvo identificando um ponto de controle.
Para testar a qualidade dos alvos, foi realizado um voo teste a 60m do solo, verificando
o contraste e reflectância em relação ao solo e vegetação (figura 19).
Figura 19 –Imagem do voo teste a 60m do solo.

3.5 Rastreio dos pontos de controle e pontos de teste
Foram rastreados 11 pontos de controle e 75 pontos de teste na área de estudo (figura
20 e 21). Os 75 pontos de teste foram divididos em duas amostras, uma com 35 pontos coletados
na parte plana e a outros 40 pontos na área com maior declividade. Este método de aquisição
de pontos em diferentes áreas foi justificado partindo da hipótese: que as imagens teriam
qualidade de informação diferentes em áreas com declividades diferentes. Para o cadastro dos
pontos de controle e de teste foi utilizado o equipamento GNSS RTK R4 da Trimble, somente
a antena de rádio interna. O método de posicionamento utilizado foi o relativo com RTK pós-
processado, obtendo solução fixa para todos os pontos. Outra configuração é referente ao
datum, que para o trabalho utilizou-se o WGS-84, com uma máscara de elevação de 15°, tendo
em vista a normas técnica de georreferencimanto. A altura da antena do receptor ROVER foi
de 2,0m acima do solo.
Figura 20 – Disposição dos pontos de controle.

Figura 21 – Coleta dos pontos de teste usando GNSS RTK.
.
3.6 Processamento dos pontos coletados
Com a coordenada da base ajustada, foi realizado o pós-processamento dos pontos de
teste e de controle no software Trimble Business Center (TBC) (figura 22). Os pontos de
controle são importantes para os processos de aerotriangulação e orientação absoluta do Modelo
Digital de Elevação.
Figura 22 – Pontos de controle e de teste processados no TBC.

3.7 Planejamento da Missão e Recobrimento Aerofotogramétrico
Utilizou-se o VANT modelo Phantom 4 PRO para cobertura aerofotogramétrica da área
de estudo (Figura 22). A altura média de voo 60 m. Para área de estudo (5 ha), foram adquiridas
205 fotografias e com tempo de voo de 13 minutos e 15 segundos. Utilizou-se a velocidade de
cruzeiro de 5 m/s e um índice de sobreposição longitudinal e lateral de 80%, totalizando 15
faixas de fotografia. No planejamento da missão foi utilizado o software Map Pilot (figura 23).
Figura 22 –VANT Phantom 4 Pro.
Fonte: DJI
Figura 23: Planejamento da Missão e Área de Recobrimento Fotogramétrico.

A área de recobrimento maior que a área de estudo evita possíveis distorções no modelo
a ser gerado nas etapas posteriores.
3.8 Geração do Modelo Digital de Elevação
As imagens selecionadas e o arquivo de coordenadas dos pontos de controle foram
importados para o software Agisoft Photoscan (figura 24). A primeira atividade a ser
desenvolvida no sistema foi o alinhamento das fotografias, que através da orientação relativa,
busca pontos homólogos nas fotografias sobreposta e no terreno (figura 25). Em seguida, é feita
uma nova seleção das imagens, onde são retiradas as imagens que não foram orientadas pelo
método de alinhamento.
Figura 24 Imagens e coordenadas dos pontos de controle.
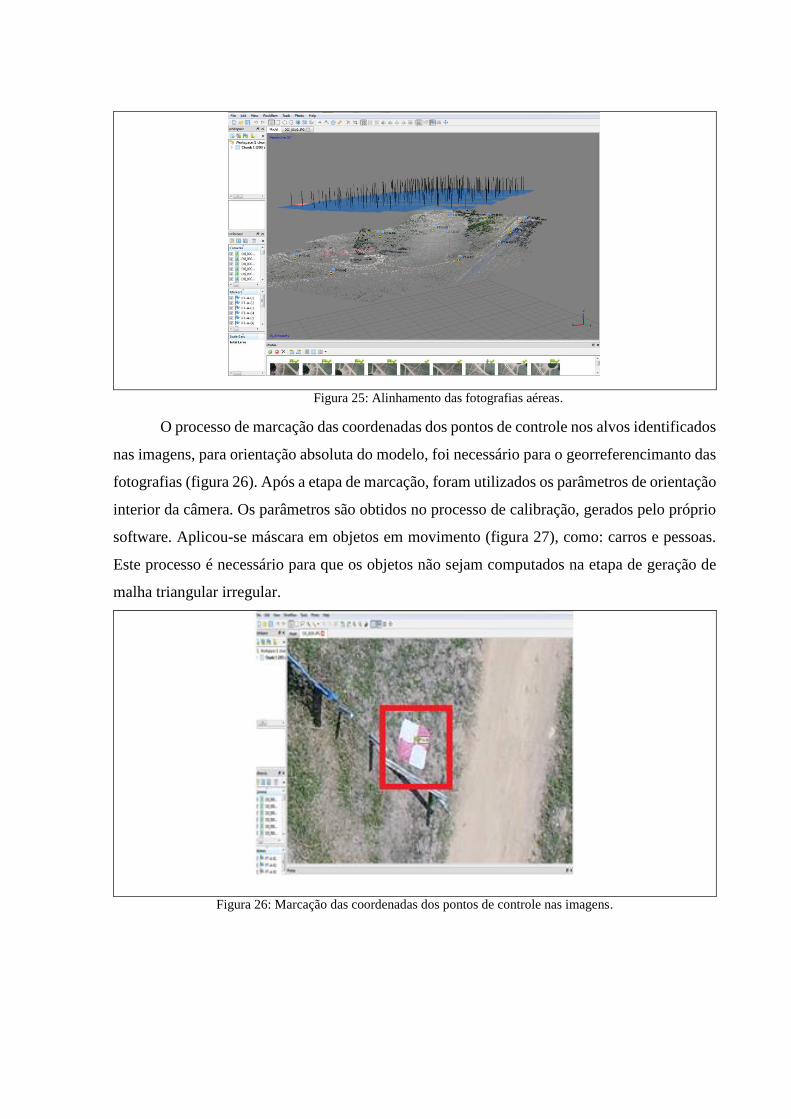
Figura 25: Alinhamento das fotografias aéreas.
O processo de marcação das coordenadas dos pontos de controle nos alvos identificados
nas imagens, para orientação absoluta do modelo, foi necessário para o georreferencimanto das
fotografias (figura 26). Após a etapa de marcação, foram utilizados os parâmetros de orientação
interior da câmera. Os parâmetros são obtidos no processo de calibração, gerados pelo próprio
software. Aplicou-se máscara em objetos em movimento (figura 27), como: carros e pessoas.
Este processo é necessário para que os objetos não sejam computados na etapa de geração de
malha triangular irregular.
Figura 26: Marcação das coordenadas dos pontos de controle nas imagens.

Figura 27: Máscara aplicada nos objetos em movimento.
A malha triangular irregular foi gerada a partir da nuvem espessa, com 55.222 pontos
obtidos pelo software, 13.619 vértices e 26.555 faces (figura 28).
Figura 28: Malha triangular irregular.
Após o processo de geração da malha triangular, procedeu-se a geração da nuvem densa
de pontos. A nuvem densa de pontos gerada contém 76.588.576 de pontos (figura 29).

Figura 29: Nuvem densa de pontos.
Em seguida, através da nuvem densa foi possível a confecção do modelo digital de
elevação, com resolução espacial foi 3,24 cm/pixel (figura 30).
Figura 30: Modelo Digital de Elevação.
3.9 Análise da acurácia altimétrica do MDE
O modelo digital elevação georreferênciado e os pontos de teste processados foram
analisados em um software de sistema de informação geografia (SIG), o ArcGis 10.1. O sistema
permite extrair as coordenadas do MDE através dos pontos de teste, com a função Extract
Values to Point. A função Slope foi aplicada no MDE para a confecção do mapa de declividade.
A tabela 2 apresenta as três classes de declividade utilizadas na análise da qualidade posicional
do MDE (0°-6°, 6°-10°, 10°-25°).

Tabela 2. Pontos coletados em diferentes classes de inclinação do solo.
Dos 75 pontos de teste rastreados com GNSS RTK, somente 20 pontos foram utilizados
em cada amostra para o cálculo das estáticas, com o intuito de padronizar as amostras.
Os métodos PEC-PCD e o NSSDA foram aplicados para obter a qualidade posicional
altimétricas dos MDE. Os dois métodos requerem os estudos dos erros sistemáticos e aleatórios
das medições. Para a análise de tendências baseada na distribuição foram aplicados o t de
Student , avaliando a presença de erros sistemáticos. Já a precisão, ou análise de dispersão,
utilizou-se o teste Qui-quadrado para avaliação dos erros aleatórios. As análises foram
realizadas com nível de confiança de 90% para o PEC-PCD. O NSSDA assume que os dados
são livres de erro sistemático e aplica a análise de dispersão com nível de confiança de 95%.
Sendo o modelo digital de elevação considerado acurado para uma da classe do PEC-
PCD, desde que aceita a hipótese nula da análise de tendência, realiza-se a análise da precisão
com as discrepâncias entre as altitudes do MDE (ℎ0) e as altitudes de referência (ℎ𝑟) dos
pontos de teste coletados pelo GNSS-RTK. A expressão usada para o cálculo das discrepâncias
é:
∆ℎ = ℎ0 − ℎ𝑟 (1)
Da equação 1 obtêm-se as estatísticas de média (eq 2) e desvio padrão de amostra (eq 3).
∆̅ℎ =1
𝑛∑ Δℎ𝑛
𝑖=1 (2)
𝑠Δℎ = √1
𝑛 − 1∑(Δℎ − Δℎ̅̅̅̅ )
𝑛
𝑖=1
(3)
Classes de declividade Inclinação (°) Número de pontos coletados por classe
1 0-6 20
2 6-10 27
3 10-25 28

Na avaliação da existência de erros sistemático foram avaliadas as hipóteses se 𝐻0 ∶
Δℎ̅̅̅̅ = 0 , então Δ̅ℎ não apresenta erros sistemático, caso contrário 𝐻1: Δℎ̅̅̅̅ ≠ 0, então Δ̅ℎ
apresenta tendência. A partir do número de pontos da amostra n foi obtido o valor tabelado (
𝑡𝑛−1,𝛼/2 ). O valor obtido na tabela do teste de hipótese é comparado ao calculado (eq 4). Caso
a comparação seja do tipo (eq 5), os dados não apresentam tendência.
𝑡ℎ =∆ℎ̅̅̅̅
𝑠∆ℎ√𝑛 (4)
|𝑡𝑐𝑎𝑙| < 𝑡𝑛−1,
𝛼2
(5)
Para a análise de precisão aplicou-se o teste estatístico Qui-quadrado, obedecendo aos
valores do erro padrão altimétrico, estabelecidos na ET-ADGV. O cálculo do erro padrão
esperado (𝜎ℎ) foi computado usando a equação 6:
𝜎ℎ = 𝐸𝑃𝐴𝐿𝑇 ∗ 𝐸𝑞. 𝑑𝑎𝑠𝑐𝑢𝑟𝑣𝑎𝑠𝑑𝑒𝑛í𝑣𝑒𝑙 (6)
O teste de hipótese foi aplicado comparando o desvio-padrão das discrepâncias das
altitudes com o erro padrão da classe PEC-PCD. As hipóteses foram: 𝐻0 ∶ 𝑆Δℎ2 = 𝜎ℎ
2contra
𝐻1 ∶ 𝑆Δℎ2 > 𝜎ℎ
2 . Para testar a que classe PEC-PCD o valor calculado do teste Qui-quadrado
(eq 7), deve ser inferior ao tabelado (eq 8). Assim, através destes procedimentos mencionados
foi possível identificar a qualidade cartográfica altimértica do MDE quanto sua escala e sua
respectiva classe PEC-PCD. Onde n é o tamanho da amostra dos pontos de teste coletados, S o
desvio padrão das discrepâncias e σ é o erro padrão esperado para uma das classes PEC-PCD.
𝑋ℎ2 = (𝑛 − 1)
𝑠Δℎ2
𝜎ℎ2
(7)
𝑋ℎ2 ≤ 𝑋(𝑛−1,𝛼)
2 (8)
O método desenvolvido pelo FGDC, o NSSDA foi usado para avaliar a precisão dados
geoespaciais digitais do modelo digital de elevação e o do GNSS RTK. A precisão dos dados

horizontal e vertical pode ser aplicada ao nível de confiança de 95% e assume que todos os
erros seguiram uma distribuição normal.
O erro quadrático médio (RMSE) (eq 9) foi utilizado para estimar a precisão vertical do
Modelo Digital de Elevação. A acurácia é calculada usando a seguinte expressão (eq 10):
𝑅𝑀𝑆𝐸(ℎ) = √∑ (ℎ0 − ℎ𝑟)2𝑛
𝑖=1
𝑛 (9)
𝐴𝑐𝑢𝑟á𝑐𝑖𝑎 (ℎ) = 𝑅𝑀𝑆𝐸 (ℎ)𝑥 1,96 (10)
A avaliação da precisão posicional baseia-se na comparação dos desvios entre pontos
de verificação homólogos nos dados de referência (ℎ𝑟) e os pontos do modelo digital de
elevação (ℎ0). Para aplicar a equação 9 e 10, assume que os dados não possuem erros
sistemáticos. O método NSSDA foi usado admitindo uma distribuição normal ou gaussiana
nas amostras de teste. A norma do FGDC não estabelece um valor limite ou valores de
comparação. Assim os valores de comparação são estabelecidos por órgãos que trabalham com
dados geoespaciais.

4 RESULTADOS E DISCUSSÕES:
O modelo digital de elevação, obtido via técnicas de fotogrametria com VANT,
apresentou um GSD de 3,24 cm/pixel. Este valor é justificado principalmente pela altura de voo
utilizada no levantamento (60 m) e a qualidade das fotografias aéreas do sensor (resolução
espacial e radiométrica). A alta qualidade do GSD requer dos dados de controle uma precisão
ainda melhor. Deste modo, o processamento dos dados geodésicos para os pontos de controle
coletados via GNSS RTK apresentou precisões verticais mínimas de 0,008m e máximas de
0,015m, respectivamente. Enquanto as precisões horizontais máximas e mínimas foram 0,004m
e 0,022 m, respectivamente.
Para os pontos de teste utilizados na análise da acurácia, o processamento geodésico
apresentou precisão média vertical e horizontal de 0,009m e 0,017m, respectivamente. As
precisões obtidas demonstram a qualidade dos pontos de teste ao nível de confiança de 95%.
Outra vantagem na aquisição da base de referência é a eficiência e produtividade do GNSS
RTK, bastando apresentar solução fixa no momento do rastreio. Os pontos com alta qualidade
posicional foram fundamentais para aplicação dos métodos de precisão cartográficos.
Quanto ao levantamento utilizando VANT, a nuvem de pontos recobriu toda a área de
estudo, apresentando pouca variação de densidade em relação à localização, chegando a
76.588.576 pontos (153 pontos/m²). A alta densidade de pontos é justificada pelo índice de
sobreposição longitudinal de 80% e lateral 80%. Refletindo assim na alta qualidade do modelo
gerado. O MDE resultante do levantamento aerofotogramétrico, gerado a partir da nuvem de
pontos densa do VANT, representou todas as feições topográficas da superfície irregular da
área de estudo.
Assim, efetuou-se a primeira análise da acurácia cartográfica do modelo digital de
elevação com a metodologia de classificação PEC-PCD. Depois de realizada a análise da
presença de erros sistemáticos e aleatório nas amostras de testes, para o estudo de tendência e
precisão, foi possível obter as discrepâncias por meio da (eq 1). Os gráficos de discrepâncias
para cada classe são apresentados nas figuras 31, 32 e 33, sendo possível visualizar os valores
que dão origem as estáticas de média (eq 2) e desvio padrão utilizados de acordo a ET-ADGV
De posse das estatísticas, as classes A e B tiveram a hipótese nula rejeitada ao nível de
confiança de 90%, indicando tendência nas duas primeiras amostras analisadas. A presença de

tendência nas amostras indica possibilidade de existência de erros sistemáticos, porém os
mesmos são passiveis de correção. Utilizou-se o teste Qui-quadrado para avaliar a acurácia
vertical apenas da classe 3, as classes 1 e 2 apresentaram tendência. Portanto, nesta etapa só foi
classificado o MDE de acordo a classe 3 de declividade, que obteve Classe A do PEC-PCD
para a escala de 1:1000 (equidistância de 1m), ao nível de confiança de 90%. Assim, pode
afirmar que esta classe é precisa e livre de erros sistemáticos.
Figura 31: Gráfico das Discrepâncias
Figura 32: Gráfico das Discrepâncias
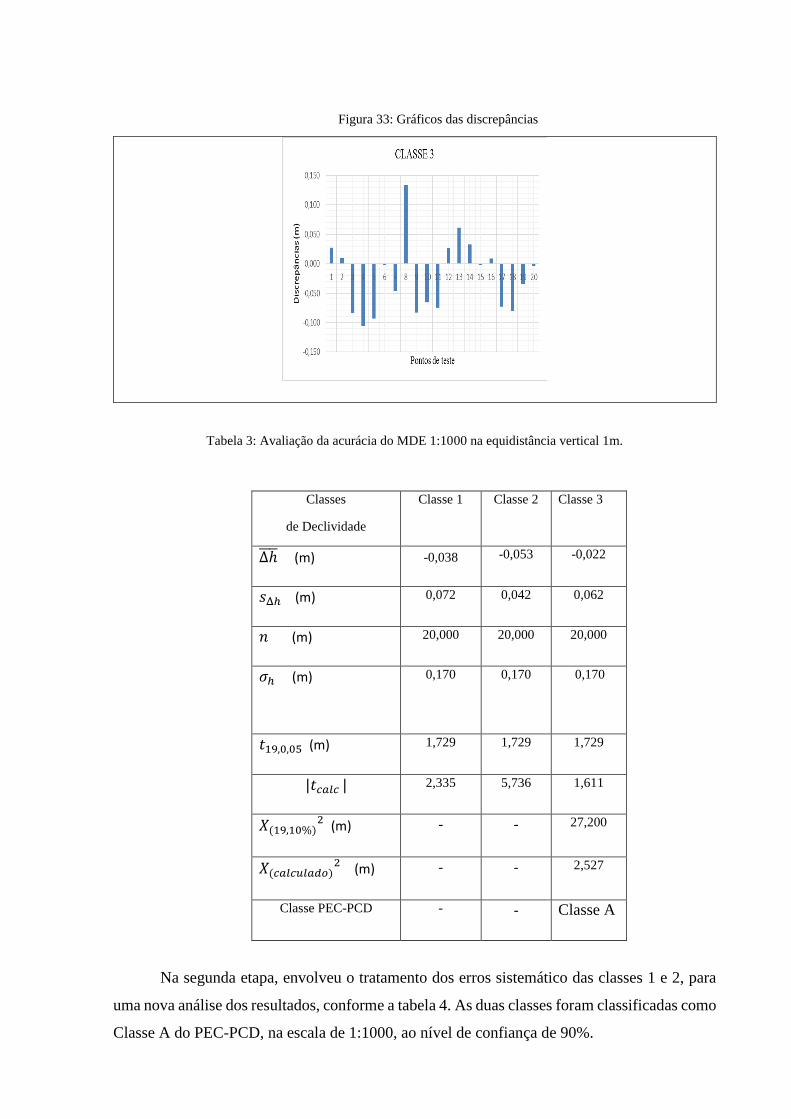
Figura 33: Gráficos das discrepâncias
Tabela 3: Avaliação da acurácia do MDE 1:1000 na equidistância vertical 1m.
Na segunda etapa, envolveu o tratamento dos erros sistemático das classes 1 e 2, para
uma nova análise dos resultados, conforme a tabela 4. As duas classes foram classificadas como
Classe A do PEC-PCD, na escala de 1:1000, ao nível de confiança de 90%.
Classes
de Declividade
Classe 1 Classe 2 Classe 3
∆ℎ̅̅̅̅ (m) -0,038 -0,053 -0,022
𝑠Δℎ (m) 0,072 0,042 0,062
𝑛 (m) 20,000 20,000 20,000
𝜎ℎ (m) 0,170 0,170
0,170
𝑡19,0,05 (m) 1,729 1,729 1,729
|𝑡𝑐𝑎𝑙𝑐 | 2,335 5,736 1,611
𝑋(19,10%)2 (m) - - 27,200
𝑋(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜)2 (m) - - 2,527
Classe PEC-PCD - - Classe A

Tabela 4: Avaliação da acurácia do MDE 1:1000 na equidistância vertical 1m.
O erro sistemático para classe 1 e 2 é justificável, pois o modelo digital de elevação leva
em conta a vegetação e edificações, sendo os pontos de teste coletados ao nível do solo. Já os
pontos homólogos do modelo foram computados ao nível da vegetação rasteira em sua maioria.
(figura 34).
Pode-se justificar a não ocorrência de erros sistemáticos na classe 3, pois tanto os pontos
do modelo digital de elevação quanto os pontos do GNSS RTK foram capturados em regiões
de solo expostos (figura 35). Essa classe só ficou sujeita aos erros do procedimento de ajuste
do modelo.
Classes
de Declividade
Classe 1 Classe 2 Classe 3
∆ℎ̅̅̅̅ (m) 0,000 0,000 -0,022
𝑠Δℎ (m) 0,072 0,042 0,062
𝑛 (m) 20,000 20,000 20,000
𝜎ℎ (m) 0,170 0,170 0,170
𝑡19,0,05 (m) 1,729 1,729 1,729
|𝑡𝑐𝑎𝑙𝑐 | (m) 0,030 0,049 1,611
𝑋(19,10%)2 (m) 27,200 27,200 27,200
𝑋(𝑐𝑎𝑙𝑐𝑢𝑙𝑎𝑑𝑜)2 (m) 3,397 1,142 2,527
Classe PEC-PCD Classe A Classe A Classe A

Figura 34: Vegetação Rasteira.
Figura 35: Solo Exposto.
A tabela 4 apresenta os resultados encontrados na análise do método desenvolvido pelo
FGDC, o NSSDA. Para esse método, utilizou-se também o RMSE para estimar a acurácia
vertical do modelo digital de elevação. A análise da acurácia vertical foi aplicada ao nível de
confiança de 95%, assumindo que todos os erros seguiram uma distribuição normal com erros
sistemáticos eliminados em etapa anterior.

Tabela 4: Avaliação da acurácia do MDE
Assim, a classe que apresentou maior acurácia foi Classe 3, ao nível de confiança de 95
%. Porém vale ressaltar que as classes avaliadas não apresentaram diferença expressivas no
valor da acurácia quando comparadas entre si. Denotando que a acurácia altimétrica não sofreu
alterações significativas para as classes avaliadas.
Classes de
Declividade
RMSE
(m)
ACURÁCIA (NSDDA)
(m)
Classe 1 0,079 0,156
Classe 2 0,067 0,131
Classe 3 0,064 0,125

5 CONCLUSÃO:
O modelo digital de elevação, confeccionado a partir do levantamento
aerofotogramétrico por VANT, foi classificado nas três faixas de declividades como classe “A”
do PEC-PCD, para uma equidistância vertical de 1m obedecendo a ET-ADGV,. Assim, conclui-
se que o levantamento altimétrico por VANT possui natureza cadastral, visto a classificação de
uso quanto a escala de mapeamento. As análises de precisão cartográfica pelo método NSSDA
apenas apresentaram os valores de acurácia para cada amostra de pontos. O FGDC não
estabelece valores para comparação, ficando a cargo de outros órgãos os padrões para
classificação.
A partir dos resultados obtidos nesta pesquisa, é possível concluir que apesar da modelo
aeronave utilizada no trabalho ser considerada de aplicações recreativas, o modelo digital de
elevação a partir de fotografias coletadas apresentou um elevado nível de acurácia altimétrica.
A justificativa para o alto grau de detalhamento das feições topográficas e exatidão vertical se
deve ao alto número de pontos gerados na nuvem densa, por meio de processos fotogramétricos
e pela qualidade dos pontos de controle obtidos por meio do GNSS RTK.
Por fim, embora os resultados apresentem uma alta acurácia altimétrica e produtividade
no levantamento usando VANT, as etapas do processamento digital das imagens requerem uma
estrutura computacional de alta performance. Assim, os requisitos mínimos de hardware,
exigidos pelo fabricante do software de processamento (Agisoft Photoscan), devem ser
obedecidos para tornar viável todas as configurações de processamento.
5.1 Sugestões para trabalhos futuros:
Analise da influência da vegetação na qualidade altimétrica dos modelos digitais de
elevação.
Avaliação da exatidão planimétrica de ortomosaicos usando VANT.
Uso de VANT em levantamentos planialtiméricos para elaboração de projetos
geométricos de estradas.


6 REFERÊNCIAS BIBLIOGRÁFICAS:
AGISOFT.SoftwareAgisoftPhotoScan.<http://www.agisoft.ru/products/photoscan/professiona
l/buy/educational/>.Acesso em 20 set 2016.
Agência Nacional de Aviação Civil - ANAC. Drones. Disponível em:
<http://www.anac.gov.br/assuntos/páginas-tematicas/drones>. Acesso em: 26 dez. 2016.
Bonifacio, M. B., Seixas, A., Marques de Sá, L. A. C. A Utilização de redes geodésicas para o
cadastro rural. Anais 1º Simpósio de Geotecnologias no Pantanal, Campo Grande, Brasil, 11-
15 novembro 2006. Disponível em: < http://mtc-m16b.sid.inpe.br/col/sid.inpe.br/mtc-
m17@80/2006/12.11.13.40/doc/p32.pdf>. Acesso em: 26 fev. 2016.
Brasil. Decreto nº 89.817, de 20 de junho de 1984.Instruções Reguladoras das Normas
Técnicas da Cartografia Nacional. Brasília, BRASIL, Disponível em:
<http://www.concar.gov.br/detalheDocumentos.aspx?cod=8>. Acesso em: 08 nov. 2016.
Boeing, E. L. ; VITALIS, F. ; CATEN, A. T. . APLICAÇÃO DE VEÍCULO ÁEREO NÃO
TRIPULADO PARA O MAPEAMENTO. 2014. (Apresentação de Trabalho / Congresso).
CONCAR. Comissão Nacional de Cartografia. Especificação Técnica para Estruturação de
Dados Geoespaciais Vetoriais - ET-EDGV. 2.1.3 ed. 2010, 246 p. Disponível em: <
http://www.geoportal.eb.mil.br/index.php/inde2?id=140 > Acesso em: 28 mar. 2017.
Dias, F.F., Santos, D.S. (2011) Uso de Anaglifos como Alternativa para Práticas de
Estereoscopia em Sensoriamento Remoto, Anuário do Instituto de Geociências, vol. 34,nº2,
Rio de Janeiro. Disponível em: < http://www.anuario.igeo.ufrj.br/2011_2/2011_2_105_111.pdf
> Acesso em :28 fev 2017..
Diretoria de Serviço Geográfico (DSG). Especificação técnica para a aquisição de dados
geoespaciais vetoriais (ET- ADGV). Ministério da Defesa, Exército Brasileiro, Departamento
de Ciência e Tecnologia. Brasília – DF, 2ª edição, 2011.
Eisenbeiss, Henri. A mini unmanned aerial vehicle (UAV): system overview and
imageacquisition. International Workshop on "Processing and visualization using high-
resolution imagery". Pitsanulok, Thailand. Nov. 2004.Disponível em: <
https://pdfs.semanticscholar.org/.../3a3d661a99b641914989a402...>28 mar. 2017.
Furtado, Maria Freitas. Comparação altimétrica entre pontos obtidos GPS RTK e
Fotogrametria Digital. 2003. 86 f. Dissertação (Mestrado) - Curso de Mestrado em Engenharia
Civil, Departamento de Transportes, Escola de Engenharia de São Carlos, Universidade de São
Carlos, São Carlos, 2003. Disponível em:
<http://www.teses.usp.br/teses/disponiveis/18/18137/tde-01102015-152915/pt-br.php>.
Acesso em: 07 set. 2016.

GALVÃO, Gustavo Mátar. Acurácia da mosaicagem gerada por veículo aéreo não tripulado
utilizado na agricultura de precisão. 2014. ix, 39 f. Trabalho de conclusão de curso
(bacharelado - Agronomia) - Universidade Estadual Paulista, Faculdade de Ciências Agrárias e
Veterinárias de Jaboticabal, 2014. Disponível em: <http://hdl.handle.net/11449/119194>.
Acessado em :28/10/2016.
Google Earth. Google Earth. Version x. Disponível Em :< http://earthgoogle.com>. Acesso
em:20 set. 2016.
HORUS AERONAVES.AEROFOTOGRAMETRIA COM DRONE: CONCEITOS
BÁSICOS. Florianópolis ,: Horus Aeronaves, 2016. Disponível em:
<http://maptor.horusaeronaves.com/ebook-aerofotogrametria> Acessado em :28/04/2016.
IBGE. Modelo de Ondulação Geoidal. Disponível em:
<http://www.ibge.gov.br/home/geociencias/geodesia/modelo_geoidal.shtm>. Acesso em: 6
mar. 2017
Instituto Nacional de Colonização e Reforma Agraria INCRA.NORMA TÉCNICA PARA
GEORREFERENCIAMENTO DE IMÓVEIS RURAIS.2010. Disponível em:
<http://www.incra.gov.br/estrutura-fundiaria/regularizacao-fundiaria/certificacao-de-imoveis-
rurais/file/119-2-edicaorevisada-da-norma-tecnica-para-georreferenciamento-de-imoveis-
rurais>. Acesso em: 10 out. 2016.
Instituto Brasileiro de Geografia e Estatística (IBGE). Recomendações para levantamentos
relativos estáticos –GPS. Brasília, 2008 Disponível em:
<www.inde.gov.br/images/inde/recom_gps_internet.pdf>. Acesso em: 06 fev. 2017.
Jensen, J. R. Sensoriamento Remoto do Ambiente: uma perspectiva em Recursos Terrestres.
Traduação de J. C. N. Epiphanio. São José dos Campos, SP: Parênteses, 2009. 598 p. (Prentice
Hall Series in Geographic Information Sciennce) Tradução de: Remote Sensing of the
environment: na earth resource perspective.
Monico, J. F. G. Posicionamento pelo GNSS: descrição, fundamentos e aplicações. 2ª ed. São
Paulo: Unesp, 2008. 473p.
Monico, J. F. G.; Póz, A. P. D.; Galo, M.; Santos, M. C.; Oliveira, L. C. “Acurácia e precisão:
revendo os conceitos de forma acurada. ” Bol. Ciênc. Geod., sec. Comunicações, Curitiba, v.
15, nº 3, p.469-483, jul-set, 2009.
Medeiros, F. A., Alonço, A. S., Balestra, M. R. G., Dias, V. O., Landerhal Jr. M. L., Utilização
de um veiculo aéreo não-tripulado em atividades de imageamento georreferênciado. Ciência
Rural, Santa Maria, v-38, n.8, p.2375-2378, Nov, 2008. Disponível em
:<http://www.cartografia.org.br/cbc/trabalhos/4/183/CT04-75_1404148668.pdf>. Acessado
em: 28 nov. 2016 .

NOAA (National Oceanic and Atmospheric Administration - Office of Coast Survey). U.S
Department of Commerce. Disponível em: <
http://oceanservice.noaa.gov/facts/geodesy.html>. Acesso: 20 jan. 2017.
Novo, E. M. L. M, - Sensoriamento Remoto, Princípios e Aplicações – 4ª Ed. Edgard Blucher,
2010.
Oliveira, M.M., Ed. Caroline Soudant, (2008) A Documentação como Ferramenta de
Preservação da memória. Cadastro, Fotografia, Fotogrametria e Arqueologia, Cadernos
Técnicos 7, Brasília. Disponível em :<
http://portal.iphan.gov.br/uploads/publicacao/CadTec7_DocumentacaoComoFerramenta_m(2
).pdf>
Pinto, Luiz Edmundo Kruschewsky.Curso de Topografia.2. ed. Salvador-Ba: Centro Editorial
e Didático Ufba, 1989. 344 p.
Preosck, Roberto Elizeu; MITISHITA, Edson Aparecido; ANTUNES, Alzir Felippe Buffara.
OTIMIZAÇÃO DA RESTITUIÇÃO FOTOGRAMÉTRICA DIGITAL URBANA:
RELAÇÃO ESCALA DA FOTOGRAFIA E A RESOLUÇÃO GEOMÉTRICA DA
IMAGEM. Boletim de Ciências Geodésicas, Boletim de Ciências Geodésicas, v. 14, n. 2,
p.242-255, abr./jun.2008. Disponível em:
<http://revistas.ufpr.br/bcg/article/view/11818/8329>. Acesso em: 25 jan. 2017.
Rosalen, D.L. Estudo do processo de captação de imagens aplicado à fotogrametria
digital.1997.Dissertação(Mestrado em Engenharia dos Transportes) - Escola de Engenharia de
São Carlos, Universidade de São Paulo, São Paulo,1997.
Silva, Irineu; SEGANTINE, Paulo Cesar Lima.Topografia para Engenharia: teoria e prática
de geomática.Rio de Janeiro: Elsevier Brasil, 2015. 432 p.
Sebem, Elódio; MONGUILHOTT, Michele (Org.). Curso de cartografia básica, GPS e
ArcGIS. Santa Maria: Colégio Politécnico da Ufsm, 2010. 228 p. Disponível em:
<200.132.36.199/ppgap/downloads/Curso_Cartografia_Basica_GPS_ArcGIS.pdf>. Acesso
em: 05 mar. 2017.
Santos, R.B. Metodologias para geração e atualização de mosaicos de fotos aéreas no Projeto
ARARA .2004. Dissertação (Mestrado em Ciências de Computação e Matemática
Computacional) -Instituto de Ciências Matemáticas e Matemática Computacional) – Instituto
de Ciências Matemáticas e de Computação, Universidade de São Paulo, São Carlos ,2004.
Disponível em :< http://www.teses.usp.br/teses/disponiveis/55/55134/tde-06122004-
154803/pt-br.php > Acesso em :08 nov 2016
Sato, S.S. Sistema de controle de qualidade dos processos fotogramétricos digitais para
produção de dados espaciais .2003 .229 f. Tese (Doutorado em Engenharia dos Transportes) -
Escola de Engenharia de São Carlos, Universidade de São Paulo, São Carlos,2003. Disponível
em :< http://www.teses.usp.br/teses/disponiveis/18/18137/tde-09052016-111226/pt-br.php >
Acesso em :29 nov 2016

Silva, C., Duarte, C., Souto, M., Santos, A., Amaro, V., Bicho, C. Sabadia, J., 2014. Avaliação
da acurácia do cálculo de volume de pilhas de rejeito utilizando VANT, GNSS e LiDAR. Boletim de Ciências Geodésicas. Vol. 22, pg. 73-94. Disponível em :< http://www.scielo.br/pdf/bcg/v22n1/1982-2170-bcg-22-01-00073.pdf php > Acesso em :31 jan 2016
Wolf, Paul. Elements of Photogrammetry. McGraw Hill, 2000. 562 p







