
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
A non-parametric Bayesian approach todecompounding from high frequency data
Shota Gugushvili Frank van der Meulen Peter Spreij
Workshop on Analysis, Geometry and Probability (and Statistics)
Ulm, October 1, 2015

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Outline
1 Introduction
2 Non-parametric Bayes
3 Main result
4 Simulations
5 Proof

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Compound Poisson process
N = (Nt , t ≥ 0) is a Poisson process with a constantintensity λ > 0.
Yj is a sequence of i.i.d. random variables, independentof N and having a common distribution function R withdensity r .
A compound Poisson process (CPP) X = (Xt , t ≥ 0) isdefined as
Xt =Nt∑j=1
Yj .
CPPs are basic models e.g. in risk theory and queueing.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Sample path
0.0 0.5 1.0 1.5 2.0 2.5 3.0
0.0
0.2
0.4
t
Y_t

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Statistical problem
The ‘true’ parameters: λ0 and r0.
Observations: a discrete time sample X∆, . . . ,Xn∆ isavailable, where ∆ > 0 is a sampling mesh.
Problem: (non-parametric) estimation of λ0 and r0.Recovering λ0 and r0 from the observations Xi∆’s is calleddecompounding.
Some references: Buchmann and Grubel (2003),Buchmann and Grubel (2004), Comte et al. (2014),Duval (2013), van Es et al. (2007), Gugushvili etal. (2015a).
More general context of Levy processes: Comte andGenon-Catalot (2010), Comte and Genon-Catalot (2011),Neumann and Reiß (2009), and others.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Discrete observations
1 2 3 4 5
0.0
0.4
0.8
t
Y_t
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Equivalent problem
The random variables Z ∆i = Xi∆ −X(i−1)∆, 1 ≤ i ≤ n, are
i.i.d. Each Z ∆i is distributed as
Z ∆ =T∆∑j=1
Yj ,
where T ∆ is independent of the sequence Yj and has aPoisson distribution with parameter ∆λ.
Equivalent problem: Estimate λ0 and r0 based on thesample Z∆
n = (Z ∆1 ,Z
∆2 , . . . ,Z
∆n ).

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Haarlemmerolie

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Statistical Haarlemmerolie
Statistical Haarlemmerolie
To be or not to be?The problem seems quite tough to me!But don’t despair, my poor soul,I’ve found the way to reach the goal
By thinking hard for many daysAnd pain depicted on my face:I’ll use the rule by Thomas BayesTo elegantly close the case!
Shota Gugushvili, September 2015

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Non-parametric Bayes
Non-parametric Bayesian approach to inference for Levyprocesses has been considered in the literature only inGugushvili et al. (2015a) and Gugushvili et al. (2015b).
Advantages: automatic quantification of uncertainty inparameter estimates through Bayesian posterior crediblesets; (Bayesian) adaptation.
One may also think of a non-parametric Bayes approach asa means for obtaining a frequentist estimator.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Likelihood
Bayes’ theorem combines the likelihood and prior into theposterior. We start with the likelihood.
The law Q∆λ,r of Z ∆
i is not absolutely continuous withrespect to the Lebesgue measure.
A specific choice of the dominating measure for Q∆λ,r is
not essential for inferential conclusions, but a clever choicemay greatly simplify the theoretical analysis.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
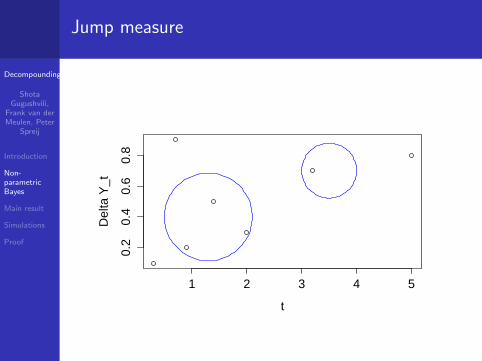
Jump measure
ForB ∈ B([0,∆])⊗ B(R \ 0)
define the random measure µ by
µX (B) = #t : (t,Xt − Xt−) ∈ B.
Let R∆λ,r be the law of (Xt : t ∈ [0,∆]).
Under R∆λ,r , the random measure µX is a Poisson point
process on [0,∆]× (R \ 0) with intensity measureΛ(dt, dx) = λdtr(x)dx .
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Jump measure
1 2 3 4 5
0.2
0.4
0.6
0.8
t
Del
ta Y
_t

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Continuously observed CPP
Fix λ and r .
Provided λ, λ > 0, and r > 0,
dR∆λ,r
dR∆λ,r
(X )
= exp
(∫ ∆
0
∫R
log
(λr(x)
λr(x)
)µX (dt, dx)−∆(λ− λ)
).

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
From the continuous to the discrete case
The density k∆λ,r of Q∆
λ,r with respect to Q∆λ,r
is given by
the conditional expectation
k∆λ,r (x) = E
λ,r
dR∆λ,r
dR∆λ,r
(X )
∣∣∣∣∣∣X∆ = x
,
where the subscript in the conditional expectationoperator signifies the fact that it is evaluated under R∆
λ,r.
The likelihood (in the parameter pair (λ, r)) associatedwith the sample Z∆
n is given by
L∆n (λ, r) =
n∏i=1
k∆λ,r (Z ∆
i ).
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Prior
We will use the product prior Π = Π1 × Π2 for (λ0, r0).
The prior Π1 for λ0 will be assumed to be supported onthe interval [λ, λ] and to possess a density π1 with respectto the Lebesgue measure.
The prior for r0 will be specified as a Dirichlet processmixture of normal densities.
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Digression
Suppose we have an i.i.d. sample V1, . . . ,Vn ∼ F .
An excellent nonparametric estimator of F is the empiricaldistribution function:
Fn(x) =1
n
n∑j=1
1[Vj≤x].
If we instead want to estimate the density f of F , we cansmooth Fn with a kernel W to obtain a kernel estimator
fnh(x) =1
h
∫W
(x − y
h
)dFn(y) =
1
nh
n∑j=1
W
(x − Vi
h
).
Here h > 0 is a smoothing parameter. Its choice is criticalfor a good statistical performance of fnh.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Dirichlet process prior
Dirichlet process prior is a non-parametric prior on the setof distribution functions.
Let α be a finite measure on R and let Dα denote theDirichlet process distribution with base measure α.
By definition, if F ∼ Dα, then for any Borel-measurablepartition B1, . . . ,Bk of Rd the distribution of the vector(F (B1), . . . ,F (Bk)) is the k-dimensional Dirichletdistribution with parameters α(B1), . . . , α(Bk).
Dirichlet distribution has a density defined on thek-dimensional unit simplex Sk that is proportional toxα1−1
1 · · · xαk−1k . It is a multivariate generalisation of the
Beta distribution.
Dirichlet prior has attractive properties: conjugacy, largetopological support.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Dirichlet process location mixture of normals
Introduce a convolution density
rH,σ(x) =
∫φσ(x − z)H(dz),
where H is a distribution function on R, σ > 0, and φσdenotes the density of the centred normal distribution withvariance σ2.
The Dirichlet process location mixture of normals prior Π2
is obtained as the law of the random function rH,σ, whereH ∼ Dα, and σ ∼ G for some prior distribution functionG .
In a rough sense the Dirichlet mixture prior resembles thekernel estimation approach (realisations of the Dirichletprocess are discrete distributions with infinite number ofatoms). But it is more ‘clever’ than a ‘naive’ kernelestimator.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Posterior
By Bayes’ theorem, the posterior measure of anymeasurable set A is given by
Π(A|Z∆n ) =
sA L∆
n (λ, r)dΠ1(λ)dΠ2(r)s
L∆n (λ, r)dΠ1(λ)dΠ2(r)
.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Asymptotic properties of Bayesian procedures
Our main result concerns study of asymptotic frequentistproperties of Bayesian procedures.
We will establish the posterior contraction rate in asuitable metric around the true parameter pair (λ0, r0).This will provide a frequentist justification of our approach.
The result also implies existence of Bayes point estimatesconverging in the frequentist sense to the true parameterpair (λ0, r0) with the same rate.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Parametric example
Let X1, . . . ,Xn ∼ Bernoulli(p). Take a uniform prior on p.Then
p|X1, . . . ,Xn ∼ Beta
(n∑
i=1
Xi + 1, n −n∑
i=1
Xi + 1
).
Posterior mean and variance are∑ni=1 Xi + 1
n + 2,
(∑n
i=1 Xi + 1) (n −∑n
i=1 Xi + 1)
(n + 2)2 (n + 3).
Let us view the posterior under the true parameter valuep0. As n→∞, the posterior puts more and more massaround the true parameter: it concentrates on theneighbourhoods of radius proportional to
√n.
Bernstein-von Mises theorem (discovered by Laplace).

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Posterior contraction rate
The Hellinger distance h(Q0,Q1) between two probabilitylaws Q0 and Q1 on a measurable space (Ω,F) is given by
h(Q0,Q1) =
(∫ (dQ1/2
0 − dQ1/21
)2)1/2
.
Define the complements of the Hellinger-typeneighbourhoods of (λ0, r0) by
A(εn,M) =
(λ, r) :
1√∆
h(Q∆λ0,r0
,Q∆λ,r ) > Mεn
,
where εn is a sequence of positive numbers.
We say that εn is a posterior contraction rate, if thereexists a constant M > 0, such that
Π(A(εn,M)|Z∆n )→ 0
in Q∆,nλ0,r0
-probability as n→∞.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Scaled Hellinger metric
Lemma
The following holds:
lim∆→0
1
∆h2(Q∆
λ,r ,Q∆λ0,r0
) = h2(λr , λ0r0)
=
∫(√λr(x)−
√λ0r0(x))2 dx .
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Assumptions
Assumption
(i) λ0 is in a compact set [λ, λ] ⊂ (0,∞);
(ii) The true density r0 is a location mixture of normaldensities, i.e.
r0(x) = rH0,σ0(x) =
∫φσ0(x − z)dH0(z)
for some fixed distribution H0 and a constantσ0 ∈ [σ, σ] ⊂ (0,∞). Furthermore, for some 0 < κ0 <∞,H0[−κ0, κ0] = 1, i.e. H0 has compact support.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Assumption on Π1
Assumption
The prior on λ, Π1, has a density π1 (with respect to theLebesgue measure) that is supported on the finite interval[λ, λ] ⊂ (0,∞) and is such that
0 < π1 ≤ π1(λ) ≤ π1 <∞, λ ∈ [λ, λ]
for some constants π1 and π1.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Assumption on Π2
Assumption
1 The base measure α of the Dirichlet process prior Dα hasa continuous density on an interval [−κ0 − ζ, κ0 + ζ], withκ0 as in Assumption 1 (ii), for some ζ > 0, is boundedaway from zero there, and for all t > 0 satisfies the tailcondition
α(|z | > t) . e−b|t|δ
with some constants b > 0 and δ > 0;
2 The prior on σ, Π3, is supported on the interval[σ, σ] ⊂ (0,∞) and is such that its density π3 with respectto the Lebesgue measure satisfies
0 < π3 ≤ π3(σ) ≤ π3 <∞, σ ∈ [σ, σ]
for some constants π3 and π3.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Result
Theorem
Under previous assumptions, provided n∆→∞, there exists aconstant M > 0, such that for
εn =logκ(n∆)√
n∆, κ = max
(2
δ,
1
2
)+
1
2,
we haveΠ(
A (εn,M)∣∣∣Z∆
n
)→ 0
in Q∆,nλ0,f0
-probability as n→∞.
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Discussion
For fixed ∆ (w.l.o.g. one may then assume ∆ = 1) theposterior contraction rate in Theorem 1 reduces toεn = logκ(n)√
n.
The posterior contraction rate is controlled by theparameter δ. The stronger the decay rate in (1), the betterthe contraction rate, but all δ ≥ 4 give the same valueκ = 1.
Our theorem implies existence of Bayesian point estimateswith the same frequentist convergence rates.
The (frequentist) minimax convergence rate for estimationof (λ0, r0), but some existing analogies suggest that up toa logarithmic factor it should be of order
√n∆.
Our result generalises to multivariate processes and Holdersmooth jump densities r .

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Implementation
Implementation is work in progress.
A fully non-parametric implementation appears quite adifficult task.
Instead we concentrated on the case when the density r isa discrete location mixture of normals.
Keywords: MCMC, data augmentation, auxiliary variables.
Interesting interplay between λ,∆, n and r .

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Example 1
Setup: ∆ = 1, λ = 1, r = 0.8N(2, 1) + 0.2N(−1, 1),n = 5000.
True density and posterior mean based on 15000 MCMCsamples (the first 5000 are treated as burn-in).
0.0
0.1
0.2
0.3
−2.5 0.0 2.5 5.0x
dens
ity(x
)
curve posterior mean true

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Example 2
Setup: ∆ = 1, λ = 3, r = 0.8N(2, 1) + 0.2N(−1, 1),n = 5000.
True density and posterior mean based on 25000 MCMCsamples (the first 10000 are treated as burn-in).
0.00
0.25
0.50
0.75
1.00
−2.5 0.0 2.5 5.0x
dens
ity(x
)
curve posterior mean true

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Example 1: another plot
0.2
0.3
0.4
0.5
0 5000 10000 15000iteration
psi1
0.5
0.6
0.7
0.8
0.9
0 5000 10000 15000iteration
psi2
−1
0
1
0 5000 10000 15000iteration
mu1
1.00
1.25
1.50
1.75
2.00
0 5000 10000 15000iteration
mu2
0.5
1.0
0 5000 10000 15000iteration
tau
1.85
1.90
1.95
2.00
2.05
−1.3 −1.2 −1.1 −1.0 −0.9 −0.8mu1
mu2
0.775
0.800
0.825
0.850
0.875
0.900
0.175 0.200 0.225psi1
psi2
0.00
0.25
0.50
0.75
1.00
0 10 20 30 40 50lag
acf
psi1
0.00
0.25
0.50
0.75
1.00
0 10 20 30 40 50lag
acf
tau

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Example 2: another plot
0.4
0.8
1.2
1.6
0 5000 10000 15000 20000 25000iteration
psi1
1.6
2.0
2.4
0 5000 10000 15000 20000 25000iteration
psi2
−1
0
1
0 5000 10000 15000 20000 25000iteration
mu1
1.2
1.5
1.8
2.1
0 5000 10000 15000 20000 25000iteration
mu2
0.5
1.0
1.5
0 5000 10000 15000 20000 25000iteration
tau
1.8
2.0
2.2
−1.25 −1.00 −0.75 −0.50mu1
mu2
2.0
2.2
2.4
2.6
0.6 0.8 1.0psi1
psi2
0.00
0.25
0.50
0.75
1.00
0 10 20 30 40 50lag
acf
psi1
0.00
0.25
0.50
0.75
1.00
0 10 20 30 40 50lag
acf
tau

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Roadmap
General results on posterior contraction rates (Ghosal et.al (2000), Ghosal and van der Vaart (2001) and others)are not directly applicable in our case.
However, key insights from the proofs are still valid withsuitable modifications.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Decomposition
We start with the decomposition
Π(A(εn,M)|Z∆n ) = Π(A(εn,M)|Z∆
n )φn
+ Π(A(εn,M)|Z∆n )(1− φn),
where φn is a sequence of tests.
The idea is to show that the terms on the right-hand sideseparately converge to zero in probability.
The tests φn allow one to control the behaviour of thelikelihood ratio
L∆n (λ, f ) =
n∏i=1
k∆λ,f (Z ∆
i )
k∆λ0,f0
(Z ∆i )
on the set where it is not well-behaved due to the factthat (λ, f ) is ‘far away’ from (λ0, f0).

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Tests
Sophisticated arguments show existence of tests, such thatfor any ε > εn,
Eλ0,f0 [φn] ≤ 2 exp(−(KM2 − c1)n∆ε2
n
),
supQ∆λ,f ∈Q:h∆(Q∆
λ0,f0,Q∆λ,f )>ε
Eλ,f [1− φn] ≤≤ exp(−Kn∆M2ε2
n
),
where K > 0 is a universal constant.
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
First term
We have
Eλ0,f0 [Π(A(εn,M)|Z∆n )φn]
≤ Eλ0,f0 [φn] ≤ 2 exp(−(KM2 − c1)n∆ε2
n
),
and so by the Chebyshev (Markov?) inequalityΠ(A(εn,M)|Z∆
n )φn goes to zero in probability.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Second term
The second term iss
A(εn,M) L∆n (λ, f )dΠ1(λ)dΠ2(f )(1− φn)
sL∆n (λ, f )dΠ1(λ)dΠ2(f )
.
We will show that the numerator goes exponentially fastto zero in Q∆,n
λ0,f0-probability, while the denominator is
bounded from below by an exponential function, withQ∆,nλ0,f0
-probability tending to one, in such a way that the
ratio still goes to zero in Q∆,nλ0,f0
-probability.

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Numerator
By Fubini’s theorem one can show that
Eλ0,f0 [Numn] ≤ Π(Qcn)+
x
Qn∩A(εn,M)
Eλ,f [1−φn]dΠ1(λ)dΠ2(f ).
The second term is bounded by exp(−KM2n∆ε2n).
Furthermore,
Π(Qcn) = Π2(H[−an, an] < 1− ηn, σ ∈ [σ, σ]) .
1
ηne−ba
δn .
Hence
Eλ0,f0 [Numn] .1
ηne−ba
δn + exp(−KM2n∆ε2
n).
Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Denominator
Let
εn =log(n∆)√
n∆.
It can be shown that with Q∆,nλ0,f0
-probability tending to oneas n→∞, for any constant C > 0 we have
Denomn > exp
(−(1 + C )n∆ε2
n − c log2
(1
εn
)).

Decompounding
ShotaGugushvili,
Frank van derMeulen, Peter
Spreij
Introduction
Non-parametricBayes
Main result
Simulations
Proof
Completion of the proof
The proof is completed by combining the previous bounds:provided the constant M > 0 is chosen large enough, theChebyshev inequality yields the result.







