dissertação de mestrado em engenharia elétrica
TRANSCRIPT

Universidade Federal de Minas Gerais
Escola de engenharia
Programa de Pós-Graduação em Engenharia Elétrica
Contribuições ao Estudo das Tensões de Eixo e
Correntes de Modo Comum em Motores de Indução
Acionados por Conversores PWM
De
Welington Passos de Almeida
Dissertação submetida à banca examinadora
designada pelo colegiado do Programa de
Pós-Graduação da Universidade Federal de
Minas Gerais, como parte dos requisitos
necessários a obtenção do Grau de Mestre em
Engenharia Elétrica.
Orientador: Prof. Hélder de Paula, Dr., DEE/UFMG
Belo Horizonte, 09 de junho de 2011

BANCA EXAMINADORA
Titulares
________________________________________________
Prof. Hélder de Paula, Dr., DEE/UFMG
Orientador/Examinador
__________________________________________________
Prof. Alessandro Fernandes Moreira, Ph. D., DEE/UFMG
Examinador
__________________________________________________
Prof. Sidelmo Magalhães Silva, Dr., DEE/UFMG
Examinador

Resumo
As correntes elétricas que fluem pelos rolamentos do motor de indução trifásico têm
provocado falhas imprevistas e onerosas aos usuários. Isto comprovadamente tem ocorrido de
forma recorrente com motores acionados por inversores PWM, que durante a sua operação
produzem naturalmente uma componente de tensão de modo comum. Uma das parcelas da
corrente produzida por tal tensão flui em direção à carcaça aterrada da máquina através dos
rolamentos, resultando numa contínua e cumulativa degradação dos mesmos, danificando-os
irreversivelmente. Neste contexto, a proposta do presente trabalho é a de descrever
detalhadamente as grandezas envolvidas nestes fenômenos de alta frequência, mostrando de
forma didática e esclarecedora os tipos, modos de circulação e características destas correntes,
assim como a dinâmica de ocorrência das tensões induzidas no eixo do rotor. Parte integrante
deste estudo é a descrição do comportamento da impedância do rolamento em função da
velocidade do eixo e de outros fatores que alteram a espessura da película de lubrificação do
rolamento, tais como temperatura e carga, que também são discutidos. Uma análise dos danos
produzidos aos rolamentos é feita em função da área de contato elíptica, densidade de
corrente, relação de tensão e relação de estresse. Diversas alternativas de modelagem para a
representação da máquina perante tais fenômenos são descritas e comparadas, elegendo-se
então aquela que será utilizada no presente trabalho para a análise computacional das
grandezas de alta frequência em estudo. As simulações das tensões induzidas e das correntes
não-circulantes e circulantes que se fazem presentes no motor são feitas a partir da
modelagem de um sistema de acionamento real constituído pelo conversor de frequência,
cabos de alimentação e motor de indução trifásico. Um motor especialmente modificado, de
forma a possibilitar a medição dessas tensões e correntes, é empregado nos testes
experimentais, cujos resultados são então confrontados com aqueles obtidos
computacionalmente, a fim de se verificar a validade da modelagem empregada, bem como
dos conceitos teóricos apresentados inicialmente.

Abstract
The electrical currents which flow through the bearings of an induction motor have caused
unanticipated and costly failures to users. This has been proven on a recurring basis with
motors driven by PWM inverters, which produce a natural component of common mode
voltage during their operation. One of the portions of the current produced by this voltage
flows toward the grounded frame of the machine through the bearings, resulting in its
continuous and cumulative degradation. In this context, the purpose of this paper is to
describe in detail the quantities involved in these high frequency phenomena, showing, in a
didactic and explanatory approach, the characteristics and modes of circulation of these
currents, as well as the dynamics of the occurrence of induced voltages on the rotor shaft. Part
of this study is to describe the impedance behavior of the bearing as a function of the shaft
speed and other factors that alter the thickness of the bearing lubrication, such as temperature
and load, which are also discussed. An analysis of the damage caused to the bearings is made
according to the elliptical contact area, current density, voltage ratio and relationship stress.
Several alternative models for the representation of the machine under such phenomena are
described and compared. Based this comparison, one model is elected to be used in present
work for the computational analysis of high frequency quantities under study. Simulations of
induced voltages and circulating and non-circulating currents that are present in the machine
are made from the modeling of a real drive system consisting of a frequency converter, power
cable and induction motor. A specially modified machine to enable the measurement of these
voltages and currents is used in the experimental tests, whose results are then compared with
those obtained computationally in order to verify the validity of the model, as well as of the
theoretical concepts initially presented.

Agradecimentos
Agradeço a Deus por me dar mais esta oportunidade de desenvolver conhecimentos
para a vida acadêmica, para o bem comum e pessoal.
Agradeço ao professor Hélder de Paula pela amizade, orientação, ensinamentos,
disponibilidade, apertos, discussões acaloradas e grande ajuda que impulsionaram a realização
deste trabalho.
Agradeço a toda comunidade da Universidade Federal de Minas Gerais pela
transmissão de importantes conhecimentos e pela acolhida, começando pelas pessoas que
trabalham no Laboratório de Aplicações Industriais (LAI), coordenado pelo professor Braz de
Jesus Cardoso Filho e aos integrantes do Grupo da Eletrônica de Potência (GEP), coordenado
pelo professor Porfirio Cabaleiro Cortizo; também aos professores Clever Sebastião Pereira
Silva, Glássio Costa de Miranda, Maria Helena Murta Vale, José Osvaldo Saldanha Paulino,
Selênio Rocha Silva, Manuel Losada y Gonzalez, Hani Camille Yehia, Antônio Emílio,
Reinaldo Martinez Palhares, Wallace do Couto Boaventura, Marcos Antônio Severo Mendes
e Alessandro Fernandes Moreira; aos colegas de Pós-Graduação João Américo de Castro
Júnior, Silas Yunghwa Liu, Rosembergue Pereira de Souza, Tumilla Cançado, Fernanda
Pacheco de Pinho, Carlos Henrique Nogueira de Resende Barbosa, Leonardo Adolpho
Rodrigues da Silva, Paulo César Soares, Jonathan Aguiar Espiridon, José César Vale Campos,
Sergio Alejandro Diaz Contreras, Guilherme Ferreira Trezza Knop, Julio Cesar Bernardes,
Danny Augusto Vieira Tonidandel, Thiago Calaca Barbosa, Welbert Alves Rodrigues,
Helbert Ribeiro de Sá, Edino Barbosa Giudice Filho, Romero Araujo, Roberta Dantas
Ribeiro, Elisa de Mendonça Passini, Guilherme Costa Silva, Hélciner Vitor Ferreira, Marcus
Vinícius Cordeiro Lisboa, Jonathas Guilherme, João Paulo Ramos Gomes, Kennedy Marconi
Santos e Álvaro Batista Cançado; às secretárias do Programa de Pós-Graduação em
Engenharia Elétrica Anete Vidal de Freitas Vieira e Arlete; aos técnicos administrativos Srs.
Hudson, Alisson e André.
Agradeço aos professores, funcionários, amigos e ex-aluno do Centro Federal de
Educação Tecnológica de Minas Gerais, entre eles os professores Eduardo Gonzaga da
Silveira, Maurílio Ferreira Leandro, Geraldo do Carmo, Flávio Antônio dos Santos, Túlio
Charles de Oliveira Carvalho, Rubens Marcos dos Santos, Euler Cunha Martins, Márcio
Melquíades Silva, Eduardo Henrique Lacerda Coutinho, Cláudio Pimenta, Enilce Santos
Eufrásio, Hilda Mara de Almeida, Eduardo Buccini, João Carlos Lima, Colimar Marcos
Vieira, Célio Sérgio, Antônio Santana Netto, Gilmar Machado Grossi, Joel Augusto dos

Santos, Márcia Gorett Ribeiro Grossi, Theldo Cruz Franqueira, Ely Paschoal, Aloísia Maria
Ladeira de Teixeira, José Renato Senra, Ovídio Canabrava de Oliveira, Antônio de Souza
Reis, Geraldo Eustáquio Nicolau, Danilo Fonseca, Danilo Freitas, Gerson Soares, José
Eustáquio Batista, Paulo Roberto Buccini, Gledson Melotti, Vanessa Guerra Caires, Eudes
Weber Porto, Epaminondas Souza Lage, José Mariano Gonçalves Lana, Eduardo Bueno,
Fátima Takenaka, Eduardo Nunes, Geraldo Mariano, Anderson Vagner Rocha, Anderson
Arthur Rabello, José Elias, Marco Antônio da Silva, José Francisco de Faria, Lúcio Elias,
Antônio Eustáquio Vieira, Eustáquio Pinto de Assis, Vagner Bachur, Pedro Bispo
Alexandrino, João Paulo, João Cláudio Scott, John Kennedy Schettino de Souza, Arnaldo
Avidago, Denny Collina, Marco Antônio da Silva Pinto, Sady António dos Santos, Sidelmo
Magalhães Silva, Marcos Fernando dos Santos, Patrícia Romeiro da Silva, José Henrique
Martins Neto e David Mattos Andrade Ávila, à ex-aluna Andreza Pires e aos amigos e
funcionários Wildemar Gomes dos Santos, Joaquim Olímpio e Antônio pelo incentivo e
contribuição para a realização deste trabalho.
Agradeço à mestranda Camilla de Sousa Chaves que organizou os dados geométricos
do motor de 3 cv de alto rendimento, como membro integrante do Laboratório de Transitórios
Eletromagnéticos da Faculdade de Engenharia Elétrica da Universidade Federal de
Uberlândia, e à WEG Motores Equipamentos Elétricos S.A., através do Sr. Hugo, pelas
informações privilegiadas do motor de alto rendimento produzido pela empresa.
A toda minha família pelo amor e dedicação, Niquinho “in memória”, Lêle, Heloísa,
João Aloísio, “mamãe” Dulce, “papai” Waldemar “in memória”, Chicota, Irinéia, Iara,
Márcia, Nilza, Edmar, Quito, Lena, Dinha, Guinho, Bico “in memória”, Terezinha, Renata,
Chininha e Vera, Márcia da “Cilíca”, Georgina, Regina, Rosângela “Cilíca”, Baiana, Taioba
“in memória” e aos queridos amigos Maria Ângela, Douglas Rangel, Júlio César Bandeira “in
memória”, Messias Nogueira Júnior, Ronilson Rocha, Gilson Chveid Oen e Marcindo Pereira
pela amizade e companheirismo.

Lista de Figuras
Fig. 2. 1: Sistema de acionamento típico de um motor de indução. ............................................................... 7
Fig. 2. 2: Circuito eletrostático equivalente do conversor PWM, modificado a partir de (HYYPIO, 2003). 7
Fig. 2. 3: Forma de onda da tensão Vcm como resultante das comutações dos IGBTs no barramento c.c. . 8
Fig. 2. 4: Corrente do tipo não-circulante acoplada pela capacitância Cwr, modificada a partir de (CHEN,
LIPO e NOVOTNY, 1996). ...................................................................................................................10
Fig. 2. 5: Capacitâncias Cwr1 e Cwr0 da abertura da ranhura do estator para o núcleo do rotor. .................10
Fig. 2. 6: Corrente do tipo não-circulante acoplada pela capacitância Cwf, modificada a partir de (CHEN,
LIPO e NOVOTNY, 1996). ...................................................................................................................11
Fig. 2. 7: Parâmetros da ranhura e dos respectivos isolantes utilizados no cálculo de Cwf, figura extraída a
partir de (MIRAFZAL, 2006). ..............................................................................................................12
Fig. 2. 8: Percurso da corrente circulante de uma ponta à outra do eixo do rotor, figura modificada a
partir de (ONTTO e LUOMI, 2005). ....................................................................................................14
Fig. 2. 9: Parcela ΔiL da corrente de modo diferencial que produz correntes circulantes, figura extraída de
(SHAMI e AKAGI, 2009). .....................................................................................................................15
Fig. 2. 10: (a) Capacitância existente entre esfera e pista externa de um rolamento; (b) detalhe da película
de lubrificação atuando como dielétrico da capacitância entre esferas e pistas, figura extraída a
partir de (HOPPLER e ERRATH, 2007). .............................................................................................16
Fig. 2. 11: Circuito elétrico do rolamento de um motor para “Nb” esferas em paralelo. .............................17
Fig. 2. 12: Circuito elétrico simplificado do rolamento de um motor. ..........................................................18
Fig. 2. 13: Detalhe do corte transversal de um rolamento mostrando a sua folga radial (Fr) e o raio da
esfera (Re), figura modificada a partir de (BUSSE, 1997). ...................................................................18
Fig. 2. 14: Vista transversal do setor de um motor, destacando a capacitância Cg, figura modificada a
partir de (BUSSE, 1997). .......................................................................................................................19
Fig. 2. 15: Detalhe das larguras da ranhura e do dente dos núcleos, com dois dentes alinhados, figura
modificada a partir de (SHARIFIAN, 2009).........................................................................................21
Fig. 2. 16: Localização das capacitâncias Cwf, Cwr e Cg no motor de indução, figura extraída a partir de
(ADABI, 2008). ......................................................................................................................................22
Fig. 2. 17: Circuito divisor de tensão eletrostático do motor de indução, figura modificada a partir de
(SHAMI e AKAGI, 2009). .....................................................................................................................22
Fig. 2. 18: Corrente do tipo circulante causada pela ruptura da película lubrificante, figura modificada a
partir de (SHAMI e AKAGI, 2009). .....................................................................................................24
Fig. 2. 19: Circuito divisor de tensão capacitivo do motor de indução. ........................................................25
Fig. 2. 20: Circuito equivalente para a representação do acoplamento eletromagnético no eixo pelas
correntes não-circulantes, figura extraída a partir de (ONTTO e LUOMI, 2003). .............................26
Fig. 2. 21: Detalhe das malhas A, B e C por onde fluem as correntes circulantes de condução. ..................28
Fig. 2. 22: Estrias na pista interna do rolamento causadas pelas correntes de descarga, foto extraída a
partir de (BOYANTON e HODGES, 2002). .........................................................................................30
Fig. 2. 23: Queimaduras superficiais na pista interna do rolamento causada pela corrente de descarga,
foto extraída a partir de (MUETZE, 2004). ..........................................................................................31
Fig. 3. 1: Deslocamento da linha de centro do eixo para uma posição assimétrica, figura extraída a partir
de (ADABI, 2008). .................................................................................................................................35
Fig. 3. 2: Resistência do rolamento em função da velocidade do eixo, figura modificada a partir de
(SKIBINSKI, 1995). ..............................................................................................................................36
Fig. 3. 3: (a) Superfície microscópica da esfera, figura extraída a partir de (IMMOVILLI, 2009); (b)
Gráfico mostrando qualitativamente as superfícies rugosas e onduladas de rolagem, curva extraída a
partir de (BUSSE, 1997). .......................................................................................................................37
Fig. 3. 4: Detalhe das curvaturas das pistas que envolvem a esfera. .............................................................38
Fig. 3. 5: Área de contato AH em função da carga mecânica aplicada ao eixo do motor, figura extraída a
partir de (BUSSE, 1997). .......................................................................................................................39
Fig. 3. 6: Vida útil do rolamento versus densidade de corrente, figura extraída a partir de (BUSSE, 1997).
...............................................................................................................................................................40
Fig. 3. 7: Circuito básico para análise do comportamento das induções eletrostáticas. ...............................42
Fig. 3. 8: (a) Forma de onda da tensão Vcm; (b) forma de onda da tensão Vb. ............................................44
Fig. 3. 9: Curva de Stribeck para a análise de lubrificação, extraído a partir de (BUSSE, 1997). ...............49
Fig. 3. 10: Porcentagem de tempo em função da relação Lambda (Λ), extraído a partir de (BUSSE, 1997).
...............................................................................................................................................................49
Fig. 3. 11: Marcas microscópicas de arcos elétricos na pista interna do rolamento, figura extraída a partir
de (BELL, 1998). ...................................................................................................................................51
Fig. 4. 1: Modelo com parâmetros concentrados inversor /motor, figura extraída a partir de (CHEN e
FITZGERALD, 1996). ..........................................................................................................................55
Fig. 4. 2: Modelo de sequência zero do sistema de acionamento, figura extraída a partir de (KERKMAN,
1997). .....................................................................................................................................................55
Fig. 4. 3: Modelo conversor-motor-rolamento, figura extraída a partir de (SKIBINSKI, 1995). ................57
Fig. 4. 4: Modelo do motor para resposta até a rádio frequência, figura extraída de (HALKOSAARI e
TUUSA, 1999). ......................................................................................................................................58
Fig. 4. 5: Modelo do motor de indução com resposta em frequência até a faixa de MHz, figura extraída a
partir de (XIANG, 1998). ......................................................................................................................60
Fig. 4. 6: Modelo do motor de indução com resposta em frequência de 50 kHz até 3 MHz, figura extraída a
partir de (CACCIATO, 2003). .............................................................................................................61
Fig. 4. 7: Esquema do modelo de HF para frequências de 50 kHz até 3 MHz, figura extraída a partir de
(CACCIATO, 2003). .............................................................................................................................62
Fig. 4. 8: O modelo proposto de HF para frequências de 50 kHz a 3 MHz, figura extraída a partir de
(CACCIATO, 2003). .............................................................................................................................63
Fig. 4. 9: Modelagem do motor de indução para a faixa de frequência de kHz até MHz, figura extraída a
partir de (GUBIA, 2002). ......................................................................................................................64

Fig. 4. 10: Modelagem universal do motor de indução, por fase, figura extraída a partir de (MIRAFZAL,
2006). .....................................................................................................................................................65
Fig. 4. 11: (a) Ilustra as capacitâncias Cwf, Cg e Cwr em uma parte da seção transversal do motor; (b)
mostra o detalhe da ranhura do estator envolvendo os parâmetros utilizados no cálculo da
capacitância concentrada por ranhura Cwf-slot, figuras extraídas a partir de (MIRAFZAL, 2006). ....66
Fig. 4. 12: O tipo de conexão do enrolamento trifásico do estator altera o valor da capacitância Cwf-effective.
...............................................................................................................................................................68
Fig. 4. 13: Modelagem universal do motor de indução trifásico, figura extraída a partir de (MIRAFZAL,
2006). .....................................................................................................................................................70
Fig. 5. 1: Sistema trifásico de acionamento típico, figura extraída modificada a partir de (PAULA, 2005).
...............................................................................................................................................................73
Fig. 5. 2: Vista geral do sistema de acionamento implementado no Simulink/Matlab. .................................74
Fig. 5. 3: Topologia da ponte inversora de dois níveis, figura extraída a partir de (PAULA, 2011). ...........75
Fig. 5. 4: Arranjo especial de uma célula π para a modelagem do cabo, figura extraída de (PAULA, 2005).
...............................................................................................................................................................77
Fig. 5. 5: Ranhura do núcleo do estator do motor WEG de 3 cv, alto rendimento, figuras fornecidas pelo
fabricante de motores WEG..................................................................................................................79
Fig. 5. 6: (a) e (b) detalhe das dimensões das ranhuras do estator; (c) desenho do disco do rotor do motor
de teste, desenhos fornecidos pelo fabricante de motores WEG. ..........................................................81
Fig. 5. 7: Apresentação das dimensões básicas do rolamento e folga radial. ................................................83
Fig. 5. 8: Associação da modelagem universal ao subsistema eixo/rolamentos, figura modificada a partir
de (MIRAFZAL, 2006). .........................................................................................................................84
Fig. 5. 9: Subsistema Eixo/rolamentos. ..........................................................................................................85
Fig. 5. 10: (a) Forma de onda das tensões idênticas sobre os rolamentos do lado DE e NDE,
respectivamente, com resultado da simulação; (b) detalhe de um setor da figura (a) numa base de
tempo menor. ........................................................................................................................................86
Fig. 5. 11: (a) Resultado da simulação da tensão Vcm nos terminais do motor de indução; (b) detalhe de
um setor da figura (a) numa escala de tempo menor. ...........................................................................87
Fig. 5. 12: (a) Tensão de modo comum (curva superior) e corrente de modo comum (curva inferior); (b)
Idem, numa escala de tempo menor. .....................................................................................................88
Fig. 5. 13: (a) Resultado de simulação da corrente de condução no rolamento do lado NDE do eixo; (b)
detalhe da figura (a) numa base de tempo menor.................................................................................89
Fig. 5. 14: (a) Resultado de simulação da corrente de condução no rolamento do lado DE do eixo; (b)
detalhe de um setor da figura (a) numa base de tempo menor. ............................................................90
Fig. 5. 15: (a) Resultado de simulação da corrente de condução na capacitância Cg; (b) detalhe da figura
(a) numa escala de tempo menor...........................................................................................................91
Fig. 5. 16: (a) Resultado de simulação da corrente de condução na capacitância Cwr; (b) detalhe de um
setor da figura (a). .................................................................................................................................92

Fig. 5. 17: (a) Resultado de simulação da tensão entre as pontas do eixo do rotor; (b) detalhe da figura (a)
numa escala de tempo menor. ...............................................................................................................93
Fig. 5. 18: Resultado da simulação mostrando o pico da corrente de descarga no rolamento do lado NDE
do eixo....................................................................................................................................................95
Fig. 5. 19: Detalhe da forma de onda apenas da corrente de descarga sobre o rolamento do lado NDE,
numa base de tempo menor. .................................................................................................................96
Fig. 5. 20: Resultado da simulação mostrando o pico da corrente de descarga no rolamento do lado DE do
eixo.........................................................................................................................................................96
Fig. 5. 21: Detalhe da forma de onda apenas da corrente de descarga sobre o rolamento do lado DE, numa
escala de tempo menor. .........................................................................................................................97
Fig. 5. 22: Resultado da simulação mostrando o pico da corrente de descarga na capacitância Cg. ............97
Fig. 5. 23: Detalhe da forma de onda da corrente de descarga na capacitância Cg, numa base de tempo
menor.....................................................................................................................................................98
Fig. 5. 24: Resultado da simulação mostrando o pico da corrente de descarga na capacitância Cwr. ..........98
Fig. 5. 25: Detalhe da forma de onda da corrente de descarga na capacitância Cwr, numa escala de tempo
menor.....................................................................................................................................................99
Fig. 5. 26: (a) Resultado de simulação do pico de tensão entre as pontas do eixo que produz o pico de
corrente não-circulante de descarga, juntamente com os picos de tensões que produzem correntes
não-circulantes de condução; (b) detalhe do pico da tensão de descarga da figura (a) numa base de
tempo menor. ...................................................................................................................................... 100
Fig. 5. 27: (a) Forma de onda da tensão sobre os rolamentos das pontas DE e NDE do eixo, como resultado
de simulação; (b) detalhe do momento que ocorre a queda de tensão produzida pela corrente de
descarga numa escala de tempo menor. .............................................................................................. 101
Fig. 5. 28: Forma de onda das correntes não-circulantes e circulantes no rolamento do lado DE do eixo.102
Fig. 5. 29: Detalhe da forma de onda das correntes de descarga no rolamento do lado DE do eixo, numa
escala de tempo menor. ....................................................................................................................... 103
Fig. 5. 30: Forma de onda das correntes não-circulantes e circulantes no rolamento do lado NDE do eixo.
............................................................................................................................................................. 103
Fig. 5. 31: Detalhe da forma de onda das correntes de descarga no rolamento do lado NDE do eixo, numa
base de tempo menor. .......................................................................................................................... 104
Fig. 5. 32: Resultado de simulação da forma de onda das correntes circulantes de descarga e não-
circulantes de condução na capacitância Cg. ...................................................................................... 104
Fig. 5. 33: Detalhe da forma de onda das correntes de descarga na capacitância Cg, numa escala de tempo
menor................................................................................................................................................... 105
Fig. 5. 34: Resultado de simulação da forma de onda das correntes não-circulantes de descarga e de
condução na capacitância Cg. .............................................................................................................. 105
Fig. 5. 35: Detalhe da forma de onda das correntes não-circulantes de descarga e de condução na
capacitância Cwr, numa escala de tempo menor. ................................................................................ 106

Fig. 5. 36: Tensões entre as pontas DE e NDE do eixo que produzem correntes circulantes de descarga e de
condução. ............................................................................................................................................. 107
Fig. 5. 37: Detalhe da forma de onda das tensões simuladas entre as pontas DE e NDE do eixo, que
produzem as correntes circulantes de descarga, mostradas numa base de tempo menor. ................ 107
Fig. 5. 38: Detalhe da forma de onda da tensão simulada entre as pontas DE e NDE do eixo que produz a
corrente circulante de condução, ilustrada em uma escala de tempo menor. .................................... 108
Fig. 5. 39: Modificações especiais executadas no motor de teste, figura extraída a partir de (SHAMI e
AKAGI, 2009). .................................................................................................................................... 109
Fig. 5. 40: Porta escovas na ponta NDE do eixo e a sonda de corrente no condutor de desvio. ................. 110
Fig. 5. 41: Detalhe do ponto neutro do enrolamento trifásico e de aterramento da carcaça. ..................... 111
Fig. 5. 42: Tensão Vcm, medida entre o neutro do motor e a carcaça aterrada, em escalas de tempo
diferentes. ............................................................................................................................................ 112
Fig. 5. 43: Tensão induzida no eixo da máquina (curva superior) e correntes nos rolamentos do motor,
enfatizando-se as componentes de condução (curva inferior). ........................................................... 113
Fig. 5. 44: Tensão induzida no eixo da máquina (curva superior) e corrente de modo comum no
aterramento do motor, enfatizando sua componente de descarga (curva inferior). .......................... 114
Fig. 5. 45: (a) tensão induzida eletromagneticamente das pontas DE e NDE para o ponto de aterramento
do motor; (b) tensão eletrostática modulada pela senóide. ................................................................. 115
Fig. 5. 46: Tensão entre as pontas do eixo e tensão das extremidades do eixo para o ponto de aterramento
do motor. ............................................................................................................................................. 116
Lista de Equações
(2. 1) ........... 8
(2. 2) ........................11
(2. 3) ...............11
(2. 4) ...................................11
(2. 5) ....................................12
(2. 6).......................16
(2. 7) .........................19
(2. 8) .............................20
(2. 9) ...........................20
(2. 10) ......................20
(2. 11) .................20
(2. 12) ..............................21
(2. 13) ..............................21
(2. 14) .........................22
(3. 1) .......................39
(3. 2) ....................40
(3. 3) .......................42
(3. 4) .....................................42
(3. 5) ......................43
(3. 6) .........................43
(3. 7) ...........................43
(3. 8)................................43
(3. 9)..............................44
(3. 10) .....................45
(3. 11) ......................46
(4. 1) ............................66
(4. 2) .......................................66
(4. 3) .............................................67
(4. 4) ................................67
(4. 5) .......................67
(4. 6) .........................69
(4. 7) ........................69
(4. 8) .......................................69

(5. 1) ......................................................................................................................................................76
(5. 2) ......................................................................................................................................................76
(5. 3) ......................76

Lista de Tabelas
Tabela I - Vida elétrica útil do rolamento do motor de 15 hp acionado pelo conversor PWM. ...................41
Tabela II - Valores medidos das capacitâncias C e Cf do conversor de frequência PWM, Tabela extraída a
partir de (PAULA, 2011). ......................................................................................................................74
Tabela III - Valores dos parâmetros do circuito π relativos aos condutores de alimentação do motor de
indução. .................................................................................................................................................77
Tabela IV - Resultados dos ensaios a vazio e com rotor bloqueado. .............................................................78
Tabela V - Capacitâncias Cwf-slot e Cwf-total calculadas para os valores extremos e intermediários de Kt e δ3.
...............................................................................................................................................................80
Tabela VI - Dimensões dos rolamentos tipos 6204 ZZ e 6205 ZZ. ................................................................82
Tabela VII - Dimensões e parâmetros do motor de indução de 3 cv.............................................................83
Tabela VIII - Parâmetros da modelagem universal do motor de indução de 3 cv. ......................................84

SUMÁRIO
Capítulo 1 – Introdução Geral ............................................................................................... 1
1.1 Considerações Iniciais................................................................................................ 1
1.2 Correntes de Modo Comum no Motor de Indução....................................................... 2
1.3 Relevância e Contribuições do Trabalho .................................................................... 3
1.4 Organização do Texto................................................................................................. 4
Capítulo 2 - Fenômenos de Alta Frequência em Motores de Indução ..................................... 6
2.1 Considerações Iniciais................................................................................................ 6
2.2 Tensão de Modo Comum ............................................................................................ 6
2.3 Corrente do Tipo Não-Circulante ............................................................................... 9
2.3.1 Corrente Não-Circulante Associada à Capacitância Entre o Enrolamento do
Estator e o Núcleo do Rotor .......................................................................... 9
2.3.2 Corrente Não-Circulante Associada à Capacitância Entre o Enrolamento e o
Núcleo do Estator ....................................................................................... 11
2.4 Corrente do Tipo Circulante ..................................................................................... 13
2.4.1 Corrente Circulante Induzida Pela Corrente Não-Circulante ..................... 13
2.4.2 Corrente Circulante Gerada pela Corrente de Modo Diferencial ............... 14
2.4.3 Capacitância do Rolamento - Cb ................................................................. 16
2.4.4 Capacitância do Núcleo do Rotor para o Núcleo do Estator - Cg ................ 19
2.4.5 Circuito Divisor de Tensão Eletrostático do Motor de Indução................... 22
2.4.6 Corrente Circulante Devido à Assimetria de Impedâncias dos Rolamentos. 23
2.5 Tensões Induzidas no Eixo do Rotor ......................................................................... 24
2.5.1 Tensão Induzida Eletrostaticamente no Eixo do Rotor ................................ 24
2.5.2 Tensão Induzida Eletromagneticamente no Eixo do Rotor .......................... 26
2.6 Modos das Correntes no Rolamento ......................................................................... 27
2.6.1 Corrente de Condução ou de dv/dt.............................................................. 27
2.6.2 Corrente de Descarga ou de EDM .............................................................. 29
2.7 Conclusões ............................................................................................................... 33
Capítulo 3 - Fatores que Influenciam as Correntes de Rolamento ........................................ 34
3.1 Considerações Iniciais.............................................................................................. 34
3.2 Variação da Impedância do Rolamento em Função da Velocidade do Eixo .............. 34
3.3 Área de Contato da Elipse Hertziana ........................................................................ 37
3.4 Densidade da Corrente Aparente e Vida Útil do Rolamento...................................... 39
3.5 Relação de Tensão do Rolamento - BVR ................................................................... 42
3.6 Relação de Estresse Elétrico do Rolamento - ωestresse ................................................ 45
3.7 Variáveis Mecânicas que Influenciam o Valor da Capacitância Cb ........................... 46
3.7.1 Espessura da Película de Lubrificação e Temperatura do Rolamento ......... 46
3.7.2 Viscosidade e Aditivos do Lubrificante ....................................................... 47
3.7.3 Análise da Curva de Stribeck ...................................................................... 48
3.8 Rigidez Dielétrica e a Espessura da Película Lubrificante ........................................ 50
3.9 Conclusões ............................................................................................................... 51
Capítulo 4 – Modelagens do Motor de Indução Apropriadas Para o Estudo dos Fenômenos
de Alta Frequência ............................................................................................................... 54
4.1 Considerações Iniciais.............................................................................................. 54
4.2 Modelagem com Parâmetros Concentrados .............................................................. 54
4.3 Modelagem de Modo Comum para a Análise do Comportamento do Rolamento....... 55
4.4 Modelagem para a Análise Modal ............................................................................ 57
4.5 Modelagem com Resposta em Frequência até a Rádio Frequência - RF ................... 58
4.6 Modelagem com Resposta em Frequência até a Faixa de MHz ................................. 59
4.7 Modelagem com Resposta em Frequência de 50 kHz até 3 MHz ............................... 61
4.8 Modelagem com Resposta em Frequência na Faixa de kHz até MHz ........................ 64
4.9 Modelagem Universal do Motor de Indução Trifásico .............................................. 65
4.10 Conclusões ............................................................................................................... 71
Capítulo 5 – Simulações Computacionais e Testes Experimentais ........................................ 73
5.1 Considerações Iniciais.............................................................................................. 73
5.2 Modelagem do Sistema de Acionamento ................................................................... 73
5.2.1 Modelagem do Conversor PWM ................................................................. 74
5.2.2 Modelagem dos Cabos de Alimentação do Motor ....................................... 75
5.2.3 Modelagem do Motor de Indução ............................................................... 78
5.3 Resultados das Simulações Computacionais ............................................................. 85
5.3.1 Relação BVR do Motor Modelado e Corrente de Modo Comum no Ponto de
Aterramento de sua Carcaça ...................................................................... 85
5.3.2 Correntes Não-Circulantes e Circulantes de Condução .............................. 89

5.3.3 Correntes Não-Circulantes e Circulantes de Descarga ............................... 94
5.3.3.1 Chaves Programadas Operando Simultaneamente ............................... 95
5.3.3.2 Chaves Programadas Operando Assimetricamente ........................... 102
5.4 Testes Experimentais .............................................................................................. 108
5.4.1 Motor de Teste Especialmente Modificado ............................................... 109
5.4.2 Resultados dos Testes Experimentais ........................................................ 111
5.5 Conclusões ............................................................................................................. 116
Capítulo 6 – Conclusões Gerais e Propostas de Continuidade ........................................... 118
6.1 Conclusões Gerais .................................................................................................. 118
6.2 Propostas de Continuidade ..................................................................................... 120
Apêndice A – Cálculo da Área de Contato Hertziana ......................................................... 127
Apêndice B – Parâmetros da Modelagem de (GUBIA, 2002) ............................................. 130
Apêndice C – Modelagem Universal do Motor de Indução ................................................. 133
Apêndice D – Ilustrações Gerais ........................................................................................ 150

Capítulo 1 – Introdução Geral
1.1 Considerações Iniciais
Os motores elétricos são empregados em vários setores da atividade humana, na
execução de tarefas próprias que envolvem movimentações ou deslocamentos. Dentre os
vários tipos de motores existentes, a máquina de indução se destaca por sua simplicidade
construtiva, robustez, dimensões e custos reduzidos.
Normalmente, o motor de indução é acionado pelo conversor de frequência (Pulse
Width Modulation - PWM), do qual as seguintes vantagens podem ser destacadas:
1. O controle da corrente de linha em qualquer ponto de operação, inclusive na partida do
motor, quando a sua amplitude é ajustada de acordo com os valores tolerados pela
barra de alimentação. Assim, os conversores substituem os convencionais
acionamentos da chave de partida estrela-triângulo e da chave compensadora, com a
vantagem de fornecer um torque eletromagnético suficiente para a partida com a carga
mecânica nominal ou parcial acoplada ao eixo;
2. Controle da velocidade do eixo através de alterações na frequência da tensão aplicada,
ocorrendo tipicamente entre 3 e 400 Hz, com a possibilidade de ajuste da frequência
de comutação da ponte inversora entre 2 e 20 kHz;
3. Proteção efetiva do motor contra as sobretensões, sobrecorrentes, curtos-circuitos,
temperaturas excessivas, dentre outros parâmetros.
No entanto, a utilização de tais conversores provoca a ocorrência de alguns fenômenos
indesejáveis, quais sejam:
Sobretensões transitórias nos terminais do motor, que dependendo do tempo de subida
e espaçamento dos pulsos PWM, comprimento dos cabos de interligação conversor–
motor e impedância equivalente do motor frente aos pulsos de tensão, podem atingir
picos superiores a 3 pu, considerando 1 pu a tensão do barramento c.c. do conversor.
Uma consequência importante destas sobretensões repetitivas é o estresse imposto à
isolação do enrolamento, que indubitavelmente provoca redução acentuada do tempo
de vida útil do motor (PAULA, 2005, p. 130-154);

2
Aumento da amplitude da corrente de carga e descarga nas capacitâncias distribuídas
dos condutores de alimentação do motor em cada dv/dt dos pulsos PWM, podendo
sobrecarregar e até queimar os capacitores snubbers do conversor de frequência
(PAULA, 2005, p. 130-154) e (SUWANKAWIN e SUKHAPAP, 2005, p. 1382-
1389);
Introdução de conteúdo harmônico nas barras de alimentação do conversor, reduzindo
a qualidade do abastecimento de energia elétrica e piorando o desempenho dos
equipamentos conectados a tais barras (ARRILLAGA, 1985);
Indução de tensões eletrostáticas e eletromagnéticas de alta frequência em partes
internas ao motor, produzindo correntes que fluem através dos rolamentos, entreferro e
núcleo do estator. Estas correntes danificam os rolamentos, reduzindo a confiabilidade
do motor de indução (HYYPIO, 2003, p. 875-882) e (PAULA, 2005, p. 130-154).
Cabe ressaltar, neste momento, que o presente trabalho abordará especificamente o
efeito indesejável das tensões eletrostáticas e eletromagnéticas induzidas no interior do motor,
considerando-se que os outros fenômenos supracitados fogem ao escopo desta dissertação.
1.2 Correntes de Modo Comum no Motor de Indução
Como se sabe, uma ponte inversora operando sob PWM gera naturalmente, durante o
seu funcionamento, uma tensão de modo comum, visto que a soma instantânea das tensões de
fase resulta num valor não-nulo. Tal tensão gera correntes de deslocamento para a terra em
todos os acoplamentos capacitivos do conversor, cabo e motor. No tocante ao motor, tais
correntes de alta frequência fluem do enrolamento trifásico para os núcleos do rotor e estator
em direção à sua carcaça aterrada. As correntes que alcançam o rotor têm a alternativa de
retornar à fonte de tensão PWM através dos rolamentos, entreferro ou, ainda, por algum outro
acoplamento associado à carga mecânica ligada ao eixo do rotor. Neste trabalho, serão
analisadas apenas as correntes de modo comum que fluem pelo motor, sem passar por
quaisquer componentes mecânicos associados ao seu eixo; para tanto, este eixo é considerado
isolado eletricamente dos dispositivos de acionamento mecânico. A amplitude das correntes
de alta frequência depende do valor instantâneo da impedância do rolamento e também da
combinação dos outros acoplamentos capacitivos internos que dividem a tensão de modo
comum. Vários danos são decorrentes das correntes de alta frequência, a começar pela
degradação da graxa de lubrificação dos rolamentos, terminando com a produção de marcas,

3
queimaduras e estrias em suas pistas de rolagem, que gradualmente conduzem à inutilização
do rolamento. Portanto, o elemento crítico deste sistema sob o ponto de vista de tais correntes
é o rolamento, principalmente devido à dificuldade de obtenção do valor instantâneo de sua
impedância, que em última análise varia em função da carga mecânica, temperatura do
rolamento e velocidade do eixo.
1.3 Relevância e Contribuições do Trabalho
Nas últimas décadas, muitas investigações objetivaram o entendimento e ordenamento
da dinâmica de ocorrência das tensões de eixo e correntes de rolamento, com a finalidade de
eliminar ou minimizar a ocorrência das falhas nos motores elétricos. No que diz respeito aos
motores acionados pelos conversores PWM, a eliminação da tensão de modo comum é o
problema central e relativamente difícil de ser resolvido com a atual concepção de modulação
por largura de pulsos. Desde o início, quando da utilização dos motores de indução trifásicos,
muitos pesquisadores trabalharam no sentido de atenuar os efeitos das correntes de rolamento,
tanto em baixas quanto em altas frequências, apresentando várias soluções de mitigação no
decorrer do tempo, as quais são citadas a seguir:
Aterramento do eixo (ALGER e SAMSON, 1924, p. 235-245) e (BELL, 1998, p. 253-
262);
Utilização de rolamento isolado (ALGER e SAMSON, 1924, p. 235-245) e (MUETZE
e BINDER, 2003, p. 1859-1865);
Emprego de rolamento cerâmico ou híbrido (JOUANNE, ZHANG e WALLACE,
1997, p. 478-485);
Uso de graxa condutora (BELL, 1998, p. 253-262) e (BUSSE, 1997, p. 567-576);
Aplicação de filtros de emissões de interferência eletromagnéticas “EMI”
(OGASAWARA e AKAGI, 1995, p. 29-36) e (SHAMI e AKAGI, 2009, p. 1532-
1540);
Execução de blindagens no interior do motor de indução (BUSSE, 1996), (ONTTO e
LUOMI, 2003, p. 274-278);
Utilização de ponte inversora dupla (JOUANNE e ZHANG, 1997, p. 1276-1280);
Desenvolvimento de compensador ativo da tensão de modo comum (XIANG, 1998, p.
1003-1009);

4
Desvio da corrente de modo comum através de caminhos alternativos de baixa
impedância (LINK, 1998, p. 181-195);
Elevação da impedância do circuito de modo comum (HYYPIO, 2003, p. 875-882).
Entretanto, de forma geral, as soluções que apresentaram altos índices de atenuação se
mostraram proibitivas devido ao custo elevado.
A relevância do presente trabalho consiste em promover um maior esclarecimento
destes fenômenos de alta frequência que envolve o motor de indução acionado pelo conversor
PWM; neste contexto, as principais contribuições do mesmo são:
1. Descrever e caracterizar, de forma didática e detalhada, o fenômeno das tensões
induzidas no eixo e das correntes de alta frequência que percorrem o motor de
indução;
2. Realizar uma ampla revisão bibliográfica e posterior análise comparativa das
modelagens do motor de indução, incluindo eixo e rolamentos, com a finalidade de
selecionar a mais apropriada para a representação dos fenômenos descritos;
3. Determinar analiticamente, os parâmetros a serem utilizados na modelagem
selecionada, aplicada ao motor de teste, para a execução de simulações
computacionais;
4. Utilizar métodos experimentais para realizar medições das grandezas de alta
frequência em estudo, para posterior comparação com a descrição teórica apresentada
inicialmente e os resultados obtidos nas simulações.
1.4 Organização do Texto
O texto desta dissertação é organizado da seguinte forma:
No capítulo 2 é apresentado o estudo dos fenômenos de alta frequência, sendo
delineados minuciosamente os tipos e os modos das correntes que fluem pelo motor de
indução, bem como os tipos das tensões induzidas no eixo do rotor. As capacitâncias
envolvidas nos processos eletrostáticos de distribuição da tensão de modo comum são
definidas e determinadas analiticamente a partir dos dados geométricos do motor de indução.
No capítulo 3 são descritos e analisados os fatores que influenciam as correntes de
rolamento, destacando-se a variação de sua impedância causada pela alteração da velocidade
do eixo, a área de contato entre as parte rolantes, densidade de corrente, relação de tensão,
relação de estresse e as variáveis mecânicas que alteram o valor da capacitância do rolamento.

5
No capítulo 4 são investigadas as alternativas de modelagem do motor de indução para
a reprodução do comportamento da distribuição da tensão de modo comum pelo eixo,
rolamento, enrolamentos e laminações do estator e rotor, permitindo a observação das
correntes de alta frequência em várias partes internas do motor. Uma ampla análise
comparativa é feita entre as modelagens avaliadas com a finalidade de se escolher aquela mais
apropriada para o presente estudo.
No capítulo 5, o sistema de acionamento é representado computacionalmente. No que
diz respeito ao conversor de frequência e cabo de interligação, modelos mais simples são
utilizados. No tocante ao motor, a modelagem escolhida do capitulo quatro é empregada.
Assim, são executadas as simulações a partir da plataforma computacional desenvolvida e
apresentados os resultados correspondentes. O motor de teste é especialmente modificado
com a finalidade de realizar as medições das grandezas de alta frequência, cujos resultados
são comparados com os obtidos nas simulações.
Finalmente, no capítulo 6 são apresentadas as conclusões gerais e as propostas de
continuidade deste trabalho.

Capítulo 2 - Fenômenos de Alta
Frequência em Motores de Indução
2.1 Considerações Iniciais
Neste capítulo, são examinadas as principais questões relacionadas aos fenômenos de
alta frequência, nos motores de indução acionados por conversores PWM. Inicialmente, a
tensão de modo comum, denominada tensão Vcm, é descrita para auxiliar na introdução dos
conceitos associados aos tipos de correntes que fluem pelo motor. As correntes dos tipos não-
circulantes e circulantes são apresentadas. As capacitâncias que constituem o circuito
eletrostático básico do motor são determinadas analiticamente, a partir dos dados geométricos
do mesmo. As tensões induzidas eletrostaticamente e eletromagneticamente no eixo do rotor
são delineadas, aquelas induzidas pelo conversor PWM são descritas em detalhes. Finalmente,
são examinadas e analisadas as correntes que fluem pelos rolamentos nos modos de condução
(dv/dt) e/ou descarga (Electric Discharge Machining - EDM).
2.2 Tensão de Modo Comum
A tensão Vcm se apresenta como uma diferença de potencial estabelecida do
enrolamento trifásico do estator para o solo, sendo distribuída pelos acoplamentos capacitivos
existentes dentro do motor. A tensão Vcm é naturalmente gerada pelo conversor de frequência
e para começar a explicá-la, tal conversor deve ser situado num sistema de acionamento
típico, como é mostrado na Fig. 2.1. Nessa figura, verifica-se que o conversor é constituído
por uma ponte retificadora trifásica, barramento intermediário de tensão c.c. e ponte
inversora, operando sob PWM. Uma fonte de tensão ou de corrente constante podem
alimentar a ponte inversora, definindo-se as duas categorias de inversores, denominados VSI
(Voltage Source Inverter) e CSI (Current Source Inverter), respectivamente (HALKOSAARI
e TUUSA, 1999) e (RASHID, 1999). Na Fig. 2.1 são mostradas as características básicas de
um conversor VSI, cujas barras de tensão c.c. positiva e negativa são ligadas à malha do
sistema de aterramento, através das capacitâncias Cpg e Cng. As tensões de fase na saída da

7
ponte inversora são Va, Vb e Vc. A tensão Vcm é verificada entre o ponto comum do
enrolamento trifásico “N” e o ponto aterrado “GND”, cuja amplitude atinge valores tão altos
quanto o valor da tensão do barramento c.c. e a sua forma de onda apresenta as mesmas
variações de chaveamento dos IGBTs que constituem a ponte inversora.
Fig. 2. 1: Sistema de acionamento típico de um motor de indução.
Para melhor compreender a geração da tensão Vcm, um circuito eletrostático
equivalente simplificado da Fig. 2.1 é apresentado na Fig. 2.2, onde a fonte de alimentação é
modelada por duas fontes de tensão referenciadas ao solo.
Fig. 2. 2: Circuito eletrostático equivalente do conversor PWM, modificado a partir de (HYYPIO, 2003).
Os valores instantâneos das tensões Vpg e Vng são aplicados às barras positiva e
negativa pelas chaves S1 e S2 respectivamente. A ponte retificadora é modelada por uma
chave ideal conectada em série com cada fonte de tensão (neste caso, a corrente de modo
comum não deve ser confundida com a de modo diferencial1). A tensão Vcm que é aplicada
1 A corrente de modo comum sempre busca um acoplamento para terra, enquanto que a de modo diferencial
circula entre as fases.

8
nos terminais do motor produz uma corrente de sequência zero que retorna ao ponto “0”,
através da malha de aterramento, dissipadores de calor e capacitâncias Cpg e Cng, existentes
entre os IGBTs e os dissipadores. A saída da ponte inversora é modelada em função da
comutação de tais IGBTs nas três fases, havendo uma única tensão Vcm aplicada nos cabos
de alimentação do motor de indução. Portanto, a tensão Vcm é uma resultante da combinação
instantânea das três tensões de fase na saída da ponte inversora, possuindo quantidades c.c.
variáveis no tempo e descrita pela equação (2.1), onde .
(2. 1)
Para k = 0, nenhum IGBT do ramo superior da ponte inversora está ligado e os três
IGBTs do ramo inferior estão ligados simultaneamente (Fig. 2.1). Para k = 1, apenas um
IGBT do ramo superior está ligado, ao passo que dois do ramo inferior estão ligados, e assim
sucessivamente, até k = 3, obtendo-se para os respectivos estados de condução dos IGBTs,
um valor de tensão Vcm constituído por um terço da soma instantânea das tensões associadas
às barras Vpg e Vng, resultando valores de tensões iguais a (Vng), [(1/3) * Vng], [(1/3) * Vpg] e
(Vpg), respectivamente. A forma de onda da tensão Vcm para um ciclo completo é mostrada
na Fig. 2.3, considerando-se que 1 pu é igual ao valor da tensão do barramento intermediário
c.c. do conversor de frequência, resultando em valores de Vpg e Vng iguais a (+/-) 0.5 pu,
respectivamente.
Fig. 2. 3: Forma de onda da tensão Vcm como resultante das comutações dos IGBTs no barramento c.c.
0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 10-4
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Tempo (s)
Tensão V
cm
em
pu.
Tensão Vcm resultante das comutações dos IGBTsnas barras Vpg e Vng.
9
A ponte inversora é projetada de forma que os estados de comutação k = 0 e k = 3
ocorram em intervalos de tempo bastante reduzidos, sendo considerados aqui somente para
melhor explicar a origem da tensão Vcm. Cada chave possui duas possibilidades de estado,
existindo (2)3 combinações possíveis relacionadas às barras Vpg e Vng em qualquer instante.
Desses oito estados, apenas os estados (000) e (111) produzem tensões de modo diferencial
igual a zero, mas esses mesmos estados produzem valores máximos da tensão Vcm, em
instantes ínfimos. Com exceção do breve intervalo de tempo para o chaveamento dos IGBTs,
a saída de cada ramo é ligada à barra c.c. positiva ou negativa, gerando contribuições
instantâneas assimétricas de cada uma das três fases, resultando, assim, uma tensão Vcm
diferente de zero a cada instante.
A tensão Vcm pode ser medida com facilidade ao se conectar as pontas de prova do
medidor de tensão entre o ponto neutro do enrolamento trifásico e um ponto aterrado qualquer
(CHEN e FITZGERALD, 1996, p. 25-32) e (HYYPIO, 2003, p. 875-882).
2.3 Corrente do Tipo Não-Circulante
A tensão Vcm aplicada aos acoplamentos existentes entre o enrolamento trifásico e os
núcleos do rotor e estator dá origem à corrente do tipo não-circulante que flui pelo motor. Tal
corrente é caracterizada por se deslocar unidirecionalmente para a carcaça aterrada do motor
por duas vias distintas:
1. Pelo eixo do rotor, rolamentos e núcleo do estator;
2. Diretamente pelo núcleo do estator.
É importante ressaltar que a corrente não-circulante ocorre simultaneamente em ambos
os percursos.
2.3.1 Corrente Não-Circulante Associada à Capacitância Entre o Enrolamento
do Estator e o Núcleo do Rotor
Uma parte da corrente não-circulante é acoplada do enrolamento trifásico para o
núcleo do rotor, através da capacitância denominada Cwr, que é distribuída ao longo de todo o
enrolamento trifásico e núcleo do rotor. As correntes não-circulantes Icwr que chegam ao
núcleo do rotor cruzando estes acoplamentos são divididas, posteriormente, pelos dois

10
rolamentos2 e retornam à fonte de tensão Vcm, cruzando o núcleo do estator aterrado e a
impedância Cin. O circuito eletrostático de acoplamento dessas correntes é mostrado na Fig.
2.4, onde se verifica a corrente Icwr fluindo por apenas um dos rolamentos, somente para
simplificar a figura. A impedância Cin representa o equivalente da combinação das
capacitâncias Cpg e Cng em série com as impedâncias de terra e do dissipador de calor (CHEN,
LIPO e NOVOTNY, 1996, p. 162-167).
Fig. 2. 4: Corrente do tipo não-circulante acoplada pela capacitância Cwr, modificada a partir de (CHEN, LIPO e
NOVOTNY, 1996).
As capacitâncias distribuídas Cwr, vistas na Fig. 2.4, estão conectadas em paralelo e
são proporcionais ao número de ranhuras do rotor (Nr). A capacitância concentrada Cwr é
modelada a partir de duas outras conectadas em série, sendo que a primeira delas, denominada
Cwro, é definida pela capacitância existente entre o núcleo do rotor e a altura da abertura da
ranhura (h0) somada à distância do entreferro g, como mostra a Fig. 2.5.
Fig. 2. 5: Capacitâncias Cwr1 e Cwr0 da abertura da ranhura do estator para o núcleo do rotor.
2 Os rolamentos podem ter dimensões diferentes ou suportarem cargas desiguais, o que acarreta impedâncias
distintas.

11
O cálculo analítico de Cwro é feito através da equação (2.2), onde b0 é a largura de
abertura da ranhura, lfe é o comprimento do núcleo do estator, εr0 é a permissividade relativa
do ar (εr0 ≈ 1.0), e ε0 é a permissividade do vácuo (ε0 = 8.85x10-12
F/m);
(2. 2)
A segunda capacitância, denominada Cwr1, é associada à região entre a espessura do
isolante de papel/cunha (hwedge+ins) e os condutores do enrolamento na ranhura (Fig. 2.5). Tal
capacitância é calculada através da equação (2.3), onde εr1 é a permissividade relativa do
material isolante papel/cunha (εr1≈ 3.0).
(2. 3)
A equação (2.4) estabelece analiticamente o valor da capacitância concentrada Cwr
(MUETZE e BINDER, 2007, p. 665-672).
(2. 4)
2.3.2 Corrente Não-Circulante Associada à Capacitância Entre o
Enrolamento e o Núcleo do Estator
Outra parcela da corrente não-circulante é acoplada do enrolamento trifásico para o
núcleo do estator, através das capacitâncias distribuídas ao longo do enrolamento trifásico e
núcleo do estator, denominadas Cwf. O circuito eletrostático deste acoplamento é mostrado na
Fig. 2.6 (CHEN, LIPO e NOVOTNY, 1996, p. 162-167).
Fig. 2. 6: Corrente do tipo não-circulante acoplada pela capacitância Cwf, modificada a partir de (CHEN, LIPO e
NOVOTNY, 1996).

12
A capacitância concentrada, denominada Cwf-total, é composta pela soma de todas as
capacitâncias Cwf ligadas em paralelo, correspondente ao número de ranhuras do núcleo do
estator (Ns). A equação (2.5) calcula, analiticamente, o valor da capacitância concentrada Cwf-
total (MIRAFZAL, 2006, p. 423-433).
(2. 5)
Onde:
εo é a constante de permissividade do vácuo;
Lslot é o perímetro interno de cada ranhura do estator, sendo igual ao dobro da
profundidade Wd somado à largura média WS da ranhura, conforme mostra a Fig. 2.7,
onde se verifica uma forma geométrica abaulada da ranhura. Este fato exige uma
compensação no cálculo do perímetro interno, que é feita sobre a dimensão da largura
média, considerando-a com um incremento de 50%, numa primeira aproximação e
Lslot ≅ 2*Wd + 1.5*WS;
Fig. 2. 7: Parâmetros da ranhura e dos respectivos isolantes utilizados no cálculo de Cwf, figura extraída a partir de (MIRAFZAL, 2006).
lfe é o comprimento do núcleo do estator ou da sua pilha de chapas;
δ1 é a espessura do papel isolante entre a parede interna da ranhura e os condutores,
como mostra a Fig. 2.7, com o valor típico definido no intervalo (0.38 < δ1 < 0.63

13
mm); δ2 é a espessura do verniz isolante do condutor (0.02 < δ2 < 0.05 mm), as
permissividades relativas são εr1 (3.0 < εr1 < 3.2) e εr2 (3.5 < εr2 < 4.0),
respectivamente;
Kt é o fator de correção da espessura do papel isolante devido ao aumento da espessura
do isolante na região próxima à abertura da ranhura e definido no intervalo (1.0 < kt <
1.5). Tal espessura é dobrada ao longo de uma parte da parede interna da ranhura do
estator (Fig. 2.7), tendo um valor igual a 2*δ1;
δ3 é o possível espaço de ar aleatório entre o papel isolante e a parede interna da
ranhura (Fig. 2.7), definido no intervalo (0.02 < δ3 < 0.3 mm), cuja permissividade
relativa é εr3 ≈ 1.
2.4 Corrente do Tipo Circulante
A corrente circulante é caracterizada por não buscar a carcaça aterrada como meio de
alcançar a fonte Vcm, mas simplesmente por circular da ponta do eixo de maior potencial
para a de menor potencial, através dos rolamentos. Tal corrente tem três fontes de origem:
1. Corrente não-circulante;
2. Corrente do modo diferencial;
3. Assimetria das impedâncias dos rolamentos.
2.4.1 Corrente Circulante Induzida Pela Corrente Não-Circulante
A tensão Vcm gera as correntes não-circulantes que penetram unidirecionalmente
pelas extremidades das bobinas de fase e são acopladas para o núcleo do estator. Entretanto,
uma parte dessas correntes não-circulantes abandona o enrolamento trifásico, nas primeiras
espiras das bobinas de cada fase, através dos acoplamentos associados ao núcleo do estator
aterrado, de forma que à medida que vai ocorrendo os abandonos de tais correntes, a
intensidade delas e, consequentemente, do fluxo magnético pulsante se reduz como mostra a
Fig. 2.8. Neste caso, o fluxo pulsante apresenta maior intensidade no lado acionado do eixo
do rotor, denominado DE, gerando também neste lado a maior a amplitude da tensão
eletromagneticamente induzida. A diferença de potencial que surge entre a extremidade DE e
a extremidade não-acionada do eixo do rotor, denominada NDE, produz uma corrente
circulante na malha fechada constituída pela ponta DE do eixo, rolamento “DE”, tampa da

14
carcaça “DE”, carcaça do motor, tampa da carcaça “NDE”, rolamento “NDE” e ponta “NDE”
do eixo (BINDER e MUETZE, 2008, p. 769-776).
Fig. 2. 8: Percurso da corrente circulante de uma ponta à outra do eixo do rotor, figura modificada a partir de
(ONTTO e LUOMI, 2005).
Este tipo de corrente circulante motivou experimentos de uma blindagem condutiva de
baixa impedância para as correntes não-circulantes, com a finalidade de drená-las diretamente
para terra e impedir a criação das linhas de força pulsantes nas laminações do núcleo. Mas,
infelizmente esta blindagem é bastante trabalhosa, além de ter um custo restritivo para a maior
parte dos fabricantes e usuários (ONTTO e LUOMI, 2003, p. 274-278) e (ONTTO e LUOMI,
2005, p. 1653-1660).
2.4.2 Corrente Circulante Gerada pela Corrente de Modo Diferencial
O chaveamento da ponte inversora também produz tensões pulsantes de modo
diferencial no enrolamento trifásico, em alta frequência, gerando correntes que são acopladas
para o núcleo do estator e novamente acopladas para outra fase. A intensidade dessas
correntes do modo diferencial, bem como o fluxo magnético pulsante por elas induzido vai
diminuindo à medida que elas vão deixando as bobinas de cada fase. Isso resulta em uma
diferença de potencial entre as pontas do eixo, de forma pulsante. Portanto, tal tensão induzida
no eixo, eletromagneticamente, gera uma corrente circulante pulsante na malha fechada

15
constituída pela ponta do eixo de maior potencial, rolamentos, tampas do motor, carcaça e
ponta do eixo de menor potencial. Um circuito simplificado com parâmetros concentrados é
apresentado na Fig. 2.9, com a finalidade de auxiliar na compreensão desta corrente do modo
diferencial, denominada ΔiL. Nessa figura, R1 e R2 são resistências das bobinas de cada fase,
incluindo o efeito pelicular; L1 é a indutância de dispersão da bobina residindo na primeira
ranhura do estator; L2 é a indutância de dispersão da bobina em outra fase e ranhura. As
capacitâncias e resistências do enrolamento trifásico para o núcleo do estator são
denominadas Cwf-a, Cwf-b, Cwf-c, Ra, Rb e Rc, respectivamente, sendo incluído o efeito
dissipativo da carcaça do motor nas resistências. A capacitância de espira para espira das
bobinas de uma mesma fase do enrolamento trifásico é descartada por ser, aproximadamente,
um décimo da capacitância Cwf-total (MOREIRA, 2002, p. 1297-1306). Considerando-se que a
fase V é instantaneamente positiva (Fig. 2.9), verifica-se que a corrente diferencial total iv,
que entra no terminal da fase V, é igual à corrente iw que sai instantaneamente pela fase W.
Entretanto, a intensidade da corrente iL1, na bobina da fase V, é diferente da intensidade da
corrente iL2, na bobina da fase W. Tal diferença é denominada ΔiL e flui para o núcleo do
estator, através do ramo série constituído por Rc e Cwf-c, retornando depois à fase W, através
do ramo série constituído por Rb e Cwf-b, independentemente do núcleo do estator se manter
aterrado ou não, pois a corrente ΔiL tem características do modo diferencial (SHAMI e
AKAGI, 2009, p. 1532-1540).
Fig. 2. 9: Parcela ΔiL da corrente de modo diferencial que produz correntes circulantes, figura extraída de
(SHAMI e AKAGI, 2009).

16
Os arranjos espaciais assimétricos dos enrolamentos favorecem, portanto, a
desigualdade entre os parâmetros, de modo que L1 ≠ L2 e Cwf-a ≠ Cwf-b, acarretando um valor
de ΔiL diferente de zero. Entretanto, se o circuito equivalente simplificado da Fig. 2.9 for
balanceado ou simetricamente distribuído, de tal forma que L1 = L2, R1 = R2, Cwf-a = Cwf-b e Ra
= Rb, a diferença ΔiL se anula. Todavia a equação (2.6) continuará válida para quaisquer
valores de Rc e Cwf-c (SHAMI e AKAGI, 2009, p. 1532-1540) e (BHATTACHARYA, 1999,
p. 552-562).
(2. 6)
2.4.3 Capacitância do Rolamento - Cb
A definição da capacitância do rolamento, bem como a do entreferro, isto é, do núcleo
do rotor para o núcleo do estator faz-se necessária para o estabelecimento do circuito
eletrostático do motor de indução, que será abordado na seção 2.4.5, de forma a auxiliar nas
explicações da dinâmica da corrente circulante provocada pela assimetria das impedâncias dos
rolamentos, na seção 2.4.6.
A capacitância equivalente do rolamento é modelada a partir de duas capacitâncias
associadas em série com a resistência ôhmica de contato da esfera com as respectivas pistas.
A capacitância que ocorre entre a pista externa e a esfera é denominada Cepe, a outra
capacitância que é estabelecida entre a pista interna e a mesma esfera é denominada Cepi, tal
como mostra a Fig. 2.10 (a).
(a) (b)
Fig. 2. 10: (a) Capacitância existente entre esfera e pista externa de um rolamento; (b) detalhe da
película de lubrificação atuando como dielétrico da capacitância entre esferas e pistas, figura extraída a
partir de (HOPPLER e ERRATH, 2007).

17
Também existe uma capacitância entre cada par de esferas, denominada Cee, que é
comumente desprezada pelo fato de ter um valor insignificante em relação às demais. Uma
delgada película de graxa lubrificante é inserida entre as superfícies das pistas e esferas para
reduzir o coeficiente de atrito e, consequentemente, aumentar a vida mecânica útil do
rolamento. Todavia, a tal película de lubrificação se torna o dielétrico das capacitâncias
formadas, o que é benéfico à medida que isola as superfícies das pistas e esferas, mas é
maléfico quando a sua rigidez dielétrica é rompida e toda a carga elétrica armazenada no eixo
é descarregada intempestivamente para a carcaça aterrada.
As resistências ôhmicas da pista interna, externa e da esfera são denominadas Rpi, Rpe
e Re, respectivamente, sendo conectadas em série com as capacitâncias Cepi e Cepe, na forma
indicada pela Fig. 2.11, onde as “Nb” esferas são ligadas em paralelo nos respectivos pontos
de conexão M e N.
Fig. 2. 11: Circuito elétrico do rolamento de um motor para “Nb” esferas em paralelo.
A modelagem simplificada do rolamento é constituída pela soma de Rpe, Rpi e Re,
representada por uma resistência equivalente denominada Rb (Fig. 2.12), a qual se encontra
conectada em série com a associação equivalente das “n” capacitâncias de Cepe e Cepi,
denominada Cb. Além disso, uma impedância não-linear, denominada Znl, é ligada em
paralelo com a capacitância Cb, com a finalidade de simular a variação instantânea da
impedância do rolamento. Tal impedância passa da característica capacitiva para resistiva,
repentinamente, quando ocorre uma ruptura dielétrica da película de lubrificação,
descarregando instantaneamente, a energia armazenada na capacitância Cb do respectivo

18
rolamento. Portanto, a impedância Znl descreve o comportamento não-linear que retrata as
descargas elétricas parciais entre pistas e esferas nas modelagens dos rolamentos. No
momento da ruptura dielétrica, a impedância do rolamento é reduzida a um simples valor
ôhmico de resistência, cujo efeito se iguala ao de um contato quase-metálico entre as
superfícies das esferas e pistas.
Fig. 2. 12: Circuito elétrico simplificado do rolamento de um motor.
A ruptura dielétrica da graxa de lubrificação é causada pela elevação da tensão sobre
os rolamentos ou eixo do rotor, que pode exceder o valor limite da tensão de ruptura,
denominada Vth. O cálculo da capacitância Cb é feito levando-se em conta o número de
esferas do rolamento Nb, permissividade do vácuo εo, permissividade relativa da película de
lubrificação εrlub, raio da esfera re e folga radial do rolamento Fr, sendo que as duas últimas
são apresentadas na Fig. 2.13.
Fig. 2. 13: Detalhe do corte transversal de um rolamento mostrando a sua folga radial (Fr) e o raio da esfera (Re),
figura modificada a partir de (BUSSE, 1997).

19
A equação (2.7) utiliza o raio da esfera e a folga radial do rolamento para estabelecer a
área superficial da esfera que, juntamente à permissividade relativa do lubrificante e o número
total de esferas, quantificam a capacitância concentrada Cb de cada rolamento (BUSSE, 1997,
p. 577-584) e (SKIBINSKI, 1995, p. 250-259).
(2. 7)
2.4.4 Capacitância do Núcleo do Rotor para o Núcleo do Estator - Cg
O núcleo do estator é ajustado dentro da carcaça do motor e ambos são ligados
solidamente, de modo que o núcleo do rotor e o núcleo do estator são separados apenas pela
distância g do entreferro. Portanto, a dimensão da distância g do entreferro é muito menor que
o diâmetro externo do rotor dre ou o diâmetro interno do estator dsi (a Fig. 2.14 mostra os raios
externo do rotor dre/2 e interno do estator dsi/2). As capacitâncias distribuídas que são
formadas ao longo e entre os núcleos do rotor e estator são denominadas Cg.
Fig. 2. 14: Vista transversal do setor de um motor, destacando a capacitância Cg, figura modificada a partir de
(BUSSE, 1997).
Para calcular, analiticamente, a capacitância concentrada Cg, os núcleos do estator e
rotor são inicialmente considerados como capacitores cilíndricos (MUETZE e BINDER,
2007, p. 665-672). No motor elétrico, a relutância do fluxo em cada pólo, denominada R, é

20
relacionada ao efeito de abertura das ranhuras, bem como ao espalhamento do fluxo e à
permeabilidade magnética do núcleo de ferro, podendo ser calculada através da equação (2.8),
onde A é a seção transversal de cada pólo e μo é a constante de permeabilidade magnética do
vácuo.
(2. 8)
A superfície do núcleo sob cada pólo e o fluxo de cada pólo são reduzidos se o efeito
das ranhuras é considerado, mantendo-se constante o valor do ampère-espira. Esta diferença
pode ser aplicada por analogia ao comprimento equivalente do entreferro, denominado ge,
sendo compensado o comprimento real do entreferro g pela substituição do comprimento
efetivo do entreferro ge na equação (2.8), obtendo-se a equação (2.9).
(2. 9)
A redução da densidade do fluxo no entreferro que é verificada no cálculo da força
magnetomotriz dos motores, ocorre devido às aberturas do entalhe das ranhuras e
normalmente é avaliada pela razão do comprimento efetivo do entreferro ge e o comprimento
real do entreferro g, ou ainda, pela razão entre a densidade máxima e média do fluxo
magnético no entreferro, denominadas Bgmáx e Bg, respectivamente. Qualquer uma destas
correlações define o coeficiente de Carter, denominado Kc, de acordo com as equações (2.10)
e (2.11) (BINDER e MUETZE, 2008, p. 769-776).
(2. 10)
(2. 11)
O coeficiente de Carter é calculado a partir da largura da ranhura (WS), largura do
dente (Wt) e distância do entreferro g, como ilustra a Fig. 2.15, considerando-se dois dentes
alinhados dos núcleos do estator e rotor. Se o comprimento do entreferro é muito pequeno em
relação à largura da ranhura, praticamente todo o fluxo cruza o dente da laminação do núcleo,
podendo-se, então, considerar que a área efetiva de cada pólo, denominada Ae, é
aproximadamente igual à area da superfície do dente ou proprocional à largura do dente.

21
Fig. 2. 15: Detalhe das larguras da ranhura e do dente dos núcleos, com dois dentes alinhados, figura
modificada a partir de (SHARIFIAN, 2009).
A equação (2.12) calcula a área da superfície efetiva, considerando tal raciocínio, onde
A é a seção transversal de cada pólo e proporcional à soma das larguras da ranhura e dente.
(2. 12)
Então, a área A contida nas equações (2.8) e (2.9) é substituída pela área efetiva Ae da
equação (2.12), obtendo-se a equação (2.13), que define o coeficiente de Carter calculado pelo
método primitivo, onde a pequena quantidade de fluxo espalhada em cada dente não é
considerada, sendo portanto, uma aproximação de primeira ordem. Atualmente, empregam-se
o método primitivo melhorado ou o método de Green para obter resultados mais precisos
(SHARIFIAN, 2009, p. 18-23).
(2. 13)
A forma de cálculo da capacitância concentrada Cg é finalmente obtida por meio da
equação (2.14), considerando-se a redução da capacitância Cg devido às aberturas das
ranhuras, quando comparado com um capacitor cilíndrico sem aberturas (MUETZE e

22
BINDER, 2007, p. 665-672) e (BINDER e MUETZE, 2008, p. 769-776). Vale ressaltar que
todos os parâmetros de (2.14) foram definidos anteriormente.
(2. 14)
A título de ilustração, a Fig. 2.16 mostra simultaneamente a localização física das
capacitâncias Cwr, Cwf e Cg no motor de indução.
Fig. 2. 16: Localização das capacitâncias Cwf, Cwr e Cg no motor de indução, figura extraída a partir de (ADABI,
2008).
2.4.5 Circuito Divisor de Tensão Eletrostático do Motor de Indução
O circuito divisor de tensão eletrostático do motor de indução, mostrado na Fig. 2.17,
é estabelecido a partir de todas as capacitâncias com parâmetros concentrados descritas até o
momento, sendo excitado pela tensão Vcm.
Fig. 2. 17: Circuito divisor de tensão eletrostático do motor de indução, figura modificada a partir de (SHAMI e
AKAGI, 2009).

23
Nesse circuito, as capacitâncias dos rolamentos são denominadas Cb e Cb1,
respectivamente. Além disso, as impedâncias dos semi-eixos do rotor, denominadas Zeixo e
Zeixo1, são consideradas. Inspecionando-se o circuito supracitado, verifica-se que a tensão
sobre o eixo ou rolamentos depende da magnitude da tensão Vcm e do divisor de tensão
capacitivo estabelecido pelas capacitâncias Cwf, Cwr, Cb, Cg e Cb1. Uma simetria de
impedâncias entre as pontas DE e NDE do eixo pode ser estabelecida, quando as impedâncias
dos semi-eixos e dos respectivos rolamentos são distribuídas simetricamente, de tal forma que
Zeixo = Zeixo1, Rb = Rb1 e Cb = Cb1 (SKIBINSKI, 1995, p. 250-259) e (SHAMI e AKAGI, 2009,
p. 1532-1540).
2.4.6 Corrente Circulante Devido à Assimetria de Impedâncias dos Rolamentos
A assimetria entre as impedâncias dos rolamentos ocorre de duas formas possíveis,
simultaneamente ou não:
1. Assimetria branda: acontece de maneira contínua, devido às diferenças permanentes
das dimensões dos rolamentos DE e NDE, onde Rb ≠ Rb1 e/ou Cb ≠ Cb1;
2. Assimetria severa: ocorre devido ao curto-circuito instantâneo da capacitância de um
dos rolamentos (Cb ≠ Cb1), produzindo uma queda de tensão repentina no respectivo
rolamento.
No caso da assimetria branda, uma ligeira diferença entre as resistências e/ou
capacitâncias dos rolamentos produz, permanentemente, uma tensão de baixa magnitude entre
as pontas do eixo, que estão em sincronismo com a tensão Vcm. Tal tensão produz pulsos de
correntes de baixa intensidade, denominada corrente circulante de condução, que flui de uma
ponta do eixo para a outra, passando pelos rolamentos. No caso da assimetria severa, a
situação é representada pelo circuito da Fig. 2.18, onde acontece uma ruptura dielétrica
instantânea na capacitância Cb1, simulada através de um curto-circuito estabelecido pelo
rápido fechamento e abertura da chave Sw1, que representa a impedância não-linear Znl. No
momento da ruptura dielétrica em Cb1, a carga elétrica de Cb, cujo dielétrico está intacto,
colabora para o aumento da corrente de curto-circuito por meio da adição da corrente que
percorre a malha II, denominada corrente circulante de descarga, pelo fato de circular
subitamente (Fig. 2.18). No mesmo instante, a carga elétrica de Cg fornece outra corrente
circulante de descarga que flui pela malha I. Então, a ruptura dielétrica instantânea de Cb1
produz uma momentânea tensão entre as pontas do eixo DE e NDE, denominada tensão de

24
descarga, por se apresentar, repentinamente, com amplitudes significativas e induzir as tais
correntes circulantes de descarga (SHAMI e AKAGI, 2009, p. 1532-1540).
Fig. 2. 18: Corrente do tipo circulante causada pela ruptura da película lubrificante, figura modificada a partir de
(SHAMI e AKAGI, 2009).
2.5 Tensões Induzidas no Eixo do Rotor
As tensões induzidas no eixo do rotor acontecem tanto em função de efeitos
eletrostáticos como eletromagnéticos. A divisão da tensão Vcm do enrolamento trifásico para
as partes internas do motor, através do circuito capacitivo, é uma indução de natureza
eletrostática. A tensão induzida eletromagneticamente ocorre na frequência fundamental,
devido à assimetria magnética no entreferro do motor (ALGER e SAMSON, 1924, p. 235-
245) e (AMMANN, 1988, p. 409-419). A tensão induzida eletromagneticamente, em altas
frequências, ocorre no eixo do rotor devido às correntes pulsantes de modo comum e/ou
diferencial, (COSTELLO, 1993, p. 419-426), (ONTTO e LUOMI, 2003, p. 274-278) e
(SHAMI e AKAGI, 2009, p. 1532-1540). Nesta seção, serão abordadas, especificamente, as
tensões induzidas eletrostaticamente pelo divisor de tensão capacitivo e as tensões induzidas
eletromagneticamente pelas correntes pulsantes de alta frequência.
2.5.1 Tensão Induzida Eletrostaticamente no Eixo do Rotor
A tensão induzida eletrostaticamente no eixo do rotor se origina dos acoplamentos
existentes entre o enrolamento trifásico e o núcleo do rotor, de forma que em cada variação da

25
tensão Vcm, as cargas elétricas são distribuídas entre as capacitâncias concentradas Cwf, Cwr e
Ceq1. A capacitância Ceq1 representa a capacitância equivalente de Cg, Cb e Cb1 ligadas em
paralelo, conforme mostra a Fig. 2.19.
Fig. 2. 19: Circuito divisor de tensão capacitivo do motor de indução.
Analisando o circuito eletrostático simplificado da Fig. 2.19, pode-se concluir que a
capacitância Cwf não exerce influência sobre a tensão eletrostática induzida no eixo.
Entretanto, a amplitude da tensão Vcm e a combinação entre as capacitâncias Cwr e Ceq1
ligadas em série, atuam diretamente sobre a tensão que é induzida no eixo. Como Ceq1 é muito
maior do que Cwr, a capacitância resultante da ligação série de Cwr e Ceq1 assume sempre
valores que se avizinham ao valor de Cwr. Portanto, a tensão eletrostática do eixo depende
diretamente do valor da capacitância de Cwr e da amplitude da tensão Vcm.
O estudo apresentado na seção anterior mostrou que qualquer diferença entre os
parâmetros associados ao eixo do rotor (Fig. 2.17), causa a assimetria das impedâncias entre
as pontas do eixo, de modo brando e/ou severo, induzindo tensões eletrostáticas que podem
ser classificadas como de:
1. Condução;
2. Descarga.
A tensão de condução é assim denominada por se apresentar no eixo do rotor
continuamente e em sincronismo com as bordas da tensão Vcm. Por outro lado, a tensão de
descarga surge entre as pontas do eixo, de tempos em tempos, estando associada,
simplesmente, ao patamar mais elevado da tensão Vcm, cuja amplitude é bem maior do que
aquela apresentada pela tensão de condução.

26
2.5.2 Tensão Induzida Eletromagneticamente no Eixo do Rotor
As tensões induzidas eletromagneticamente no eixo do rotor, em alta frequência, são
geradas pelos pulsos das correntes não-circulantes e diferenciais que se acoplam para o núcleo
do estator, ver as seções 2.4.1 e 2.4.2, respectivamente. Essas tensões induzidas no eixo do
rotor acontecem em decorrência das tensões assimétricas de fase e do elevado dv/dt
produzidos pela ponte inversora PWM. Tais tensões de eixo podem ser classificadas como:
1. Induzidas por correntes não-circulantes;
2. Induzidas por correntes diferenciais.
Até o momento, apenas um circuito eletromagnético descreve as tensões induzidas
pelas correntes não-circulantes, como é mostrado na Fig. 2.20, e não foi desenvolvido, ainda,
um circuito eletromagnético que descrevesse as tensões induzidas pelas correntes diferenciais.
No primeiro caso, é sugerido um circuito equivalente com o acoplamento eletromagnético
constituído por um transformador linear, cujo enrolamento primário apreende as variações das
correntes não-circulantes, induzindo uma tensão no enrolamento secundário que excita as
pontas DE e NDE do eixo (ONTTO e LUOMI, 2003, p. 274-278). Na Fig. 2.20, Cwf-total é a
capacitância do enrolamento trifásico para o núcleo do estator, Icm é a corrente não-circulante
acoplada para o núcleo do estator, Rne é a resistência de modo comum do núcleo do estator,
Xne é a reatância de modo comum do núcleo do estator, Xm é a reatância mútua de
magnetização, (Zb + Zb1) é a soma das impedâncias dos respectivos rolamentos e I é a corrente
circulante estabelecida na malha fechada constituída pelo eixo e rolamentos.
Fig. 2. 20: Circuito equivalente para a representação do acoplamento eletromagnético no eixo pelas correntes
não-circulantes, figura extraída a partir de (ONTTO e LUOMI, 2003).

27
Infelizmente, não foi definida a forma de obtenção dos parâmetros Rne, Xne e Xm em
(ONTTO e LUOMI, 2003, p. 274-278), ocorrendo apenas uma indicação da possibilidade do
cálculo analítico de Rne e Xne, a partir do valor da permeabilidade magnética do núcleo do
estator. O circuito equivalente que descreve a tensão induzida pelas correntes do modo
diferencial, deve ter uma configuração similar ao da Fig. 2.20, exceto que as características do
modo comum são alteradas para o modo diferencial; contudo, ainda não foram encontradas
informações suficientes a este respeito, sendo necessárias mais investigações para elucidar os
fatos. Desta forma, as simulações realizadas neste trabalho não contemplam as tensões
induzidas eletromagneticamente no eixo do rotor.
2.6 Modos das Correntes no Rolamento
As propriedades elétricas de um rolamento em rotação são complexas, devido às
alterações aleatórias de sua condutividade, que pode variar de boa à péssima, dependendo da
velocidade do eixo, carga do rolamento, temperatura e viscosidade da graxa lubrificante. De
acordo com essa variação de condutividade, as correntes que fluem pelos rolamentos podem
ser classificadas em dois modos distintos:
1. Condução ou dv/dt;
2. Descarga ou EDM (Electric Discharge Machining).
Cabe ressaltar que esses modos da corrente de rolamento podem ocorrer
simultaneamente ou não.
2.6.1 Corrente de Condução ou de dv/dt
A corrente de condução ou de dv/dt é caracterizada por fluir pelos rolamentos, sempre
em sincronismo com as variações da tensão Vcm, ocorrendo independentemente da
velocidade do eixo do motor. Tal corrente se origina do acoplamento do enrolamento trifásico
para o núcleo do rotor, através da capacitância Cwr, que é um dos responsáveis pelo
estabelecimento da tensão de eixo. Portanto, a capacitância Cwr fornece correntes de condução
para as capacitâncias do entreferro “Cg” e dos rolamentos “Cb e Cb1”. Alguns autores
associam a baixa velocidade do motor à maior amplitude da corrente de condução, devido ao
aumento do valor das capacitâncias Cb e Cb1, que provocam a redução da tensão acumulada
no eixo e ao mesmo tempo, aumentam o valor de pico das tais correntes (CHEN e
FITZGERALD, 1996, p. 25-32), (BHATTACHARYA, 1999, p. 552-562) e (BUSSE, 1997, p.

28
567-576). As correntes de condução ou dv/dt podem ser classificadas, de acordo com a
associação aos tipos de correntes, como:
1. Não-circulantes de condução, quando fluem para a carcaça aterrada a fim de
retornarem ao potencial negativo da tensão Vcm;
2. Circulantes de condução, quando percorrem malhas fechadas constituída pelo eixo,
rolamento e núcleo do estator.
A corrente não-circulante de condução ocorre para quaisquer valores das impedâncias
do eixo e rolamentos, dependendo apenas do dv/dt da tensão Vcm. No entanto, as correntes
que circulam pelos rolamentos apresentam as mesmas amplitudes e um defasamento de 1800
nas formas de onda. A tensão que produz a corrente de condução entre as pontas do eixo se
anula quando todas as impedâncias forem simétricas, isto é, Zeixo = Zeixo1 e Zb = Zb1, zerando
consequentemente a corrente circulante de condução. Caso contrário, havendo alguma
assimetria de impedâncias entre as pontas do eixo, ocorrerão as correntes circulantes de
condução, que podem circular em qualquer malha fechada mostrada na Fig. 2.21,
simultaneamente ou não, no sentido horário ou anti-horário, dependendo do local de
carregamento do eixo.
Fig. 2. 21: Detalhe das malhas A, B e C por onde fluem as correntes circulantes de condução.

29
Quantizar as parcelas das correntes não-circulantes e circulantes de condução que
fluem instantaneamente pelos rolamentos é tarefa difícil, mesmo considerando que a
assimetria ocorra apenas entre as capacitâncias dos rolamentos (Cb ≠ Cb1), sem o
conhecimento dos valores instantâneos das respectivas capacitâncias. No entanto, esta
dificuldade aumenta, ainda mais, porque as capacitâncias dos rolamentos variam a todo
instante, devido às alterações da distância entre as esferas e pistas, bem como das áreas de
contato equivalentes, que normalmente dependem da variação da temperatura, carga e
velocidade do eixo. Se estas quantidades instantâneas forem conhecidas e todas as correntes
oscilarem nas mesmas frequências, uma análise deve ser realizada no circuito da Fig. 2.21, de
acordo com a lei dos nós de Kirchhoff, para estabelecer adequadamente as correntes não-
circulantes e circulantes. Uma prova circunstancial das correntes circulantes de condução é
dada quando se verifica os pulsos de tensão entre as pontas NDE e DE do eixo ou quando o
valor de pico da corrente não-circulante de condução na entrada do eixo (Icwr, na Fig. 2.21)
não coincide com a soma instantânea dos picos das correntes Icg, Izb e Izb1. A diferença entre
tais quantidades de correntes é atribuída à presença das correntes circulantes de condução,
pois como se sabe, apenas as correntes não-circulantes de condução se dirigem à carcaça
aterrada.
A degradação química da graxa de lubrificação nos rolamentos é produzida pelas
correntes de condução que fluem continuamente por eles, independentemente de ser não-
circulante ou circulante, aumentando o coeficiente de atrito entre os elementos rolantes e
favorecendo a corrosão das superfícies metálicas das pistas e esferas (BUSSE, 1997, p. 567-
576), (JOUANNE, ZHANG e WALLACE, 1997, p. 478-485) e (BELL, 1998, p. 253-262).
2.6.2 Corrente de Descarga ou de EDM
O fenômeno da corrente de descarga no rolamento é relacionado à ruptura dielétrica da
graxa de lubrificação, que pode suportar valores de tensões inferiores ao valor limite da tensão
de ruptura Vth, considerando-se um conjunto específico de condições de operação do motor,
tais como temperatura, carga e velocidade do eixo (MUETZE e BINDER, 2007, p. 665-672).
A existência de um curto-circuito intermitente ou aleatório das capacitâncias Cb e/ou Cb1 é
caracterizada por sua ocorrência repentina, independentemente das bordas de transição da
tensão Vcm, sendo relacionada, simplesmente, ao período de maior amplitude da tensão Vcm,
bem como ao nível de carregamento do eixo. Portanto, as correntes de descarga podem

30
coincidir ou não com as bordas de transição da tensão Vcm, dependendo da espessura da
película de lubrificação ou dos contatos quase-metálicos entre as pistas e esferas. Depois das
descargas elétricas, os rolamentos passam a exibir novamente uma alta impedância,
possibilitando um novo carregamento elétrico do eixo (CHEN e FITZGERALD, 1996, p. 25-
32). A corrente de descarga tem menor probabilidade de ocorrer em baixas velocidades,
porque a espessura da película de lubrificação é reduzida, ocorrendo os contatos quase-
metálicos entre pista e esferas. Isso provoca um aumento da capacitância dos rolamentos e a
redução da tensão de eixo, de modo que o valor de tal tensão não excede ao valor limite de
ruptura dielétrica Vth. No entanto, se mesmo assim ocorrer uma corrente de descarga, não
haverá tanto prejuízo ao rolamento, devido à reduzida amplitude desta corrente. As estrias
(fluting), as queimaduras superficiais (fritting) e as marcas nas pistas são resultantes dos
danos causados pelas correntes de descarga ou de EDM. A Fig. 2.22 mostra as estrias (fluting)
na pista interna do rolamento devido às correntes de descarga (EDM).
Fig. 2. 22: Estrias na pista interna do rolamento causadas pelas correntes de descarga, foto extraída a partir de
(BOYANTON e HODGES, 2002).
A Fig. 2.23 mostra as queimaduras superficiais (fritting) e as marcas no anel interno
do rolamento, devido às correntes de descarga.

31
Fig. 2. 23: Queimaduras superficiais na pista interna do rolamento causada pela corrente de descarga, foto
extraída a partir de (MUETZE, 2004).
O primeiro sinal de degradação é o ruído no rolamento e o aumento do coeficiente de
atrito entre as partes rolantes, liberando partículas metálicas que se desgastam na graxa
lubrificante, destruindo o rolamento em pouco tempo de operação (MUETZE, 2004, p. 1989-
1995). Os danos na superfície das pistas do rolamento podem ser descritos da seguinte forma:
Uma perfuração da graxa de lubrificação é causada por correntes de descarga muito
rápidas, deixando pequenas crateras na superfície metálica das pistas;
Estas crateras são formadas pela fundição do metal no local da ruptura dielétrica;
As esferas rolam sobre estas crateras achatando-as, mas nem sempre são achatadas
idealmente, obrigando as esferas a pularem por sobre estas elevações, deixando covas
depois das crateras pelos impactos das batidas;
Finalmente, é gerado um padrão regular de vales e colinas, denominado estrias, que é
visível em toda superfície das pistas do rolamento (MUETZE, 2004, p. 1989-1995) e
(SKIBINSKI, 1995, p. 250-259).
Os tipos não-circulantes e circulantes das correntes também podem ser associados ao
modo de descarga ou EDM, podendo ser reclassificados como:
1. Não-circulantes de descarga, quando buscam a carcaça aterrada como caminho de
retorno à fonte Vcm;

32
2. Circulantes de descarga, quando transitam por um ou ambos os rolamentos em malhas
fechadas (Fig. 2.21).
As correntes não-circulantes e circulantes de descarga acontecem simultaneamente,
independentemente das rupturas dielétricas nos rolamentos serem simultâneas (simétricas) ou
em tempos distintos (assimétricas) (SHAMI e AKAGI, 2009, p. 1532-1540).
A corrente de descarga “simétrica” é constituída por duas componentes idênticas,
quando se considera uma perfeita simetria das impedâncias dos rolamentos e semi-eixos, além
de uma descarga simultânea ou simétrica em ambos os rolamentos:
A primeira componente é a corrente não-circulante de descarga abastecida por Cwr,
que flui em direção da carcaça aterrada com igual intensidade em ambos os
rolamentos;
A segunda componente é a corrente circulante de descarga fornecida por Cg, que flui
circulando pelas malhas A e B (Fig. 2.21) também com intensidades idênticas nos dois
rolamentos.
Esse caso de simetria de todas as impedâncias com as descargas simultâneas
“simétricas” é muito difícil de acontecer, embora seja didático na análise das correntes. Nesse
caso especifico, é importante ressaltar que a amplitude da tensão entre as pontas do eixo é
nula. Todavia, existem tensões idênticas “simétricas” das partes centrais do eixo para as
respectivas pontas.
Num outro caso, considerando-se que ocorra uma simetria entre todas as impedâncias,
das pontas do eixo, mas que as descargas ocorram em tempos distintos “assimétricos”, a
análise da corrente de descarga assimétrica apresenta duas características adicionais em
relação ao caso anterior, sendo uma praticamente consequência da outra:
Surge uma diferença de potencial entre as pontas do eixo com uma amplitude
proporcional à diferença de impedância ocorrida instantânea e abruptamente entre os
rolamentos no momento das descargas, onde o maior potencial se apresenta na
extremidade onde se localiza o rolamento cuja película de lubrificação esteja intacta;
A carga do rolamento cuja película de lubrificação esteja intacta é instantaneamente
transferida para o rolamento curto-circuitado, estabelecendo a corrente circulante de
descarga entre os rolamentos (Fig. 2.21, malha C).
As correntes circulantes de descarga ocorrem em pelo menos duas malhas fechadas
quando as descargas são assimétricas (seção 2.4.2).

33
2.7 Conclusões
Neste capitulo foram abordados tópicos essenciais para a compreensão dos fenômenos
de alta frequência que ocorrem no motor de indução trifásico acionado pelo conversor PWM,
onde se demonstrou a presença da tensão Vcm, produzida pelo inversor operando sob PWM.
As correntes de modo comum foram definidas como correntes não-circulantes, que
ocorrem em sincronismo com as bordas de transição da tensão Vcm, de forma permanente nos
motores acionados pelo inversor PWM. As correntes não-circulantes que fluem pelos
rolamentos podem ter as amplitudes variadas de acordo com o valor instantâneo das
respectivas impedâncias. As correntes não-circulantes podem ocorrer nos modos de condução
e/ou de descarga. As correntes circulantes são descritas como correntes causadas pelos efeitos
eletromagnéticos em altas freqüências com origem nas induções eletrostáticas de modo
comum ou diferencial. As correntes circulantes também podem ocorrer nos modos de
condução e/ou de descarga, sendo que os prejuízos causados pelas correntes de descarga aos
rolamentos são indiscutivelmente maiores do que aqueles causados pelas correntes de
condução.
As capacitâncias envolvidas nos processos de indução eletrostática da tensão Vcm
foram determinadas analiticamente, levando-se em conta, simplesmente, a geometria e
características dos materiais empregados no motor de indução. A capacitância Cwr é delineada
considerando uma ranhura perfeitamente retangular e duas capacitâncias distintas ligadas em
série; a capacitância Cwf-total leva em conta a área da superfície interna da ranhura, onde é feita
uma compensação para a ranhura de formato abaulado, levando-se em conta os seus meios
permissivos; a capacitância Cb considera a permissividade da graxa de lubrificação, a área
superficial da esfera e a distância entre esferas e pistas, que é baseada na folga radial do
rolamento; a capacitância Cg depende da permissividade do ar, da área superficial interna do
estator, da distância do entreferro e do coeficiente de Carter em função dos entalhes das
ranhuras.
As tensões eletrostáticas induzidas no eixo existem em função do módulo da tensão
Vcm e do valor de Cwr. Já, as tensões eletromagnéticas induzidas no eixo, em alta frequência,
dependem em proporção direta dos módulos das tensões modais, bem como do valor das
capacitâncias Cwf-total, nos respectivos modos sequenciais. O circuito que descreve as tensões
induzidas eletromagneticamente pelo efeito das correntes não-circulantes também foi
apresentado. Todavia, não foi evidenciada uma base confiável para a determinação dos seus
parâmetros.
Capítulo 3 - Fatores que Influenciam as
Correntes de Rolamento
3.1 Considerações Iniciais
Neste capítulo são abordados os principais fatores que alteram direta ou indiretamente
a amplitude, os tipos e modos das correntes de rolamento, agindo principalmente na variação
da capacitância Cb. O estudo começa pela variação da impedância do rolamento em função da
velocidade do eixo, contemplando os aspectos associados à área de contato da elipse
hertziana, densidade da corrente aparente e vida útil do rolamento, relação de tensão do
rolamento (BVR), relação de estresse elétrico do rolamento (ωestresse) e, ainda, as variáveis
mecânicas: espessura da película de lubrificação, temperatura, carga mecânica, viscosidade e
aditivos do lubrificante. Além disto, são examinados o desgaste mecânico e a probabilidade
de ocorrência das correntes de descarga através da curva de Stribeck, bem como a relação
entre a rigidez dielétrica, espessura da película lubrificante e o valor limite da tensão de
ruptura Vth.
3.2 Variação da Impedância do Rolamento em Função da Velocidade do Eixo
O motor operando em baixa velocidade provoca um contato quase-metálico entre as
pistas e esferas do rolamento, devido à diminuição da força centrípeta3, considerando a
aceleração da gravidade constante (ADABI, 2008, p. 903-907). Nesta situação, as esferas e
pistas são comprimidas naturalmente na direção da aceleração da gravidade, reduzindo a
espessura da película lubrificante na parte inferior dos rolamentos. Isso provoca um aumento
da capacitância dos rolamentos e da área de contato entre as esferas e pistas. A Fig. 3.1 ilustra
o deslocamento da linha de centro do eixo do rotor da posição simétrica para a posição
assimétrica da linha de centro do eixo, na direção da aceleração da gravidade (ADABI, 2008,
p. 903-907).
3 A força centrípeta é proporcional ao quadrado da velocidade angular do eixo.

35
Fig. 3. 1: Deslocamento da linha de centro do eixo para uma posição assimétrica, figura extraída a partir de
(ADABI, 2008).
Em baixas velocidades, o eixo gira com relativa excentricidade e valores maiores da
capacitância Cb, proporcionando a elevação dos picos das correntes não-circulantes de
condução e, consequentemente, a diminuição de ocorrência das correntes de descarga. À
medida que o motor desenvolve velocidades mais elevadas, a força centrípeta aumenta e a
linha de centro do eixo torna-se simétrica, de modo que as espessuras da película de
lubrificação na parte superior e inferior da linha de centro tornam-se idênticas. Assim, o eixo
gira concentricamente aos anéis interno e externo do rolamento, a espessura da película de
lubrificação atinge o valor máximo e as capacitâncias dos rolamentos são reduzidas,
provocando a redução dos picos das correntes circulantes e não-circulantes de condução. Isso,
infelizmente, fornece meios de carregamento do eixo até os níveis que excedem o valor limite
da tensão de ruptura Vth, aumentando, desta forma, a freqüência de ocorrência das correntes
não-circulantes e circulantes de descarga.
A Fig. 3.2 apresenta o resultado gráfico de medições experimentais das resistências
dos rolamentos em função da velocidade do motor (BUSSE, 1997, p. 567-576). Nota-se em
tal gráfico que o rolamento opera numa região de baixa resistência (valores inferiores a 10 Ω)
em velocidades inferiores a 4% do seu valor nominal, com característica resistiva pelo fato
dos contatos quase-metálicos entre pistas e esferas ocorrerem frequentemente. Na faixa de 4 a
20% da velocidade nominal, o rolamento opera na região de transição da característica
resistiva para capacitiva, variando rapidamente nesta estreita faixa de velocidades. No
intervalo da velocidade do motor entre 20 e 120% do valor nominal, o rolamento opera numa
região de alta resistência, cujos valores atingem patamares de MΩ, apresentando uma

36
característica predominantemente capacitiva, devido à atuação efetiva da película de
lubrificação como dielétrico do capacitor formado. Toda esta dinâmica de variação da
resistência indica que o aumento da velocidade de 4 a 120% do valor nominal proporciona um
deslizamento das esferas numa espessura crescente da película de lubrificação, confirmando
as questões relacionadas à excentricidade do eixo mencionadas anteriormente. Além disso,
são notadas as interseções nos pontos de 12 e 52% da velocidade nominal, indicando iguais
possibilidades de ocorrência das correntes de condução e de descarga nos rolamentos do lado
NDE e DE, respectivamente.
Fig. 3. 2: Resistência do rolamento em função da velocidade do eixo, figura modificada a partir de
(SKIBINSKI, 1995).
A resistência equivalente Rb, definida na seção 2.4.3, é considerada constante para um
tipo especifico de aço que constitui as esferas e pistas do rolamento, assumindo valores baixos
de resistências dos contatos quase-metálicos entre os elementos rolantes. Entretanto, numa
primeira aproximação foi estabelecido o valor constante de Rb igual a 10.0 Ω para rolamentos
associados a qualquer valor de potência nominal do motor (BINDER e MUETZE, 2008, p.
769-776). Tal fato apresenta certa coerência com as questões relacionadas e discutidas
anteriormente.

37
3.3 Área de Contato da Elipse Hertziana
As superfícies de contato entre as esferas e pistas dos rolamentos se apresentam
ásperas e rugosas, do ponto de vista microscópico. O cálculo da área de contato, com o
rolamento em operação, constitui-se numa tarefa bastante complexa, considerando-se as
instantâneas e constantes irregularidades superficiais. A Fig. 3.3(a) mostra a superfície da
esfera vista com o microscópio, onde se percebe uma grande aspereza. O gráfico da Fig.
3.3(b) ilustra a forma de onda, em termos de profundidade e rolagem, da esfera e pistas com
superfícies ásperas e sinuosas.
Fig. 3. 3: (a) Superfície microscópica da esfera, figura extraída a partir de (IMMOVILLI, 2009); (b) Gráfico
mostrando qualitativamente as superfícies rugosas e onduladas de rolagem, curva extraída a partir de (BUSSE,
1997).
Um procedimento para calcular a área de contato é baseado na teoria do ponto de
contato hertziano (HARRIS, 1991). Tal teoria considera uma área de contato em forma
elíptica, como resultante de uma deformação plástica e elástica desse acoplamento mecânico,
produzindo a denominada área de contato hertziana ou AH. No entanto, para se aplicar os

38
conceitos dessa teoria é necessário estabelecer as dimensões da elipse, sendo que tanto a
dimensão maior “a” quanto a menor “b” varia em função dos seguintes parâmetros:
1. Carga mecânica aplicada em cada esfera do rolamento, numa razão direta;
2. Somatórios da curvatura das pistas interna e externa, numa proporção inversa. Isso
quer dizer que quanto maior for o somatório das curvaturas das pistas que envolvem a esfera,
menores serão as dimensões principais das elipses formadas. A Fig. 3.4 mostra a esfera
contida nas curvaturas das pistas do rolamento. É importante salientar que não são idênticas as
respectivas áreas de contato da esfera com as pistas interna e externa, devido à diferença
existente entre os somatórios das curvaturas interior e exterior;
Fig. 3. 4: Detalhe das curvaturas das pistas que envolvem a esfera.
3. Duas quantidades intermediárias, associadas às dimensões principais da elipse, são
obtidas através de uma avaliação instantânea da diferença de curvaturas relacionada à área de
contato elíptica, utilizando-se métodos computacionais.
Os somatórios das curvaturas são obtidos com facilidade, usando as dimensões
especificas de cada rolamento e considerando-se constante, a carga aplicada à esfera. No
entanto, as duas quantidades intermediárias apresentam maior dificuldade de obtenção,
porque refletem as complexas irregularidades superficiais entre pistas e esferas. O
desenvolvimento do cálculo das dimensões dos eixos e das áreas de contato interna e externa,
se encontram no apêndice A.
Uma relação gráfica foi obtida entre a área de contato calculada e a carga mecânica
aplicada ao eixo de um motor de 15 hp, comprovando que a área de contato das esferas com a
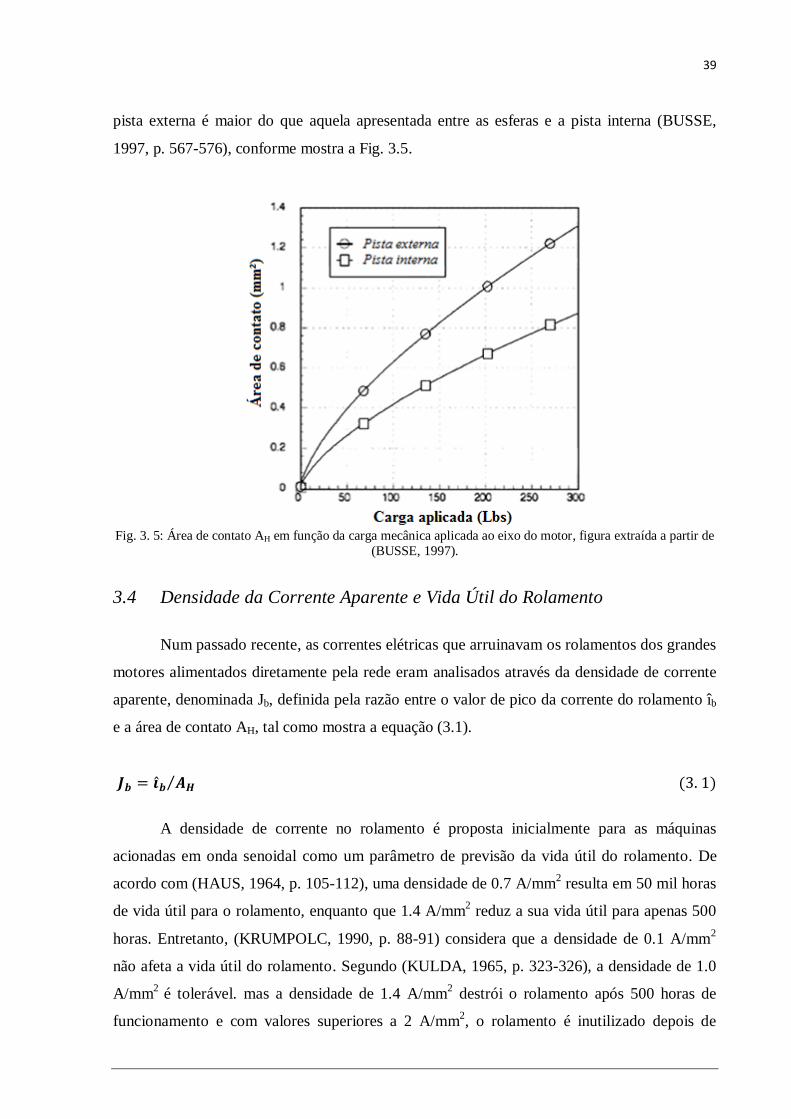
39
pista externa é maior do que aquela apresentada entre as esferas e a pista interna (BUSSE,
1997, p. 567-576), conforme mostra a Fig. 3.5.
Fig. 3. 5: Área de contato AH em função da carga mecânica aplicada ao eixo do motor, figura extraída a partir de
(BUSSE, 1997).
3.4 Densidade da Corrente Aparente e Vida Útil do Rolamento
Num passado recente, as correntes elétricas que arruinavam os rolamentos dos grandes
motores alimentados diretamente pela rede eram analisados através da densidade de corrente
aparente, denominada Jb, definida pela razão entre o valor de pico da corrente do rolamento îb
e a área de contato AH, tal como mostra a equação (3.1).
(3. 1)
A densidade de corrente no rolamento é proposta inicialmente para as máquinas
acionadas em onda senoidal como um parâmetro de previsão da vida útil do rolamento. De
acordo com (HAUS, 1964, p. 105-112), uma densidade de 0.7 A/mm2 resulta em 50 mil horas
de vida útil para o rolamento, enquanto que 1.4 A/mm2 reduz a sua vida útil para apenas 500
horas. Entretanto, (KRUMPOLC, 1990, p. 88-91) considera que a densidade de 0.1 A/mm2
não afeta a vida útil do rolamento. Segundo (KULDA, 1965, p. 323-326), a densidade de 1.0
A/mm2
é tolerável. mas a densidade de 1.4 A/mm2 destrói o rolamento após 500 horas de
funcionamento e com valores superiores a 2 A/mm2, o rolamento é inutilizado depois de

40
apenas 5 horas de operação. Na análise de densidade da corrente nos rolamentos da máquina,
apresentado por (ENDO, 1978), foi estabelecida a densidade de 1.0 A/mm2 como valor
crítico, sendo que a densidade de 1.8 A/mm2 danifica o rolamento em 2 horas de operação.
Também se comprovou, em experiências de campo, que valores de densidades entre 0.15 e
0.39 A/mm2 não deixavam marcas ou estrias nos rolamentos.
A equação (3.2) descreve a vida útil do rolamento influenciada por fenômenos
elétricos, onde se substituem valores de densidade da corrente em Apico/mm². Tal equação
estabelece a durabilidade do rolamento na faixa de 20 a 40 mil horas, utilizando os valores
limites de densidade em torno de 1.06 e 1.19 Apico/mm², respectivamente, para os motores
alimentados diretamente pela rede.
(3. 2)
A Fig. 3.6 mostra graficamente as exponenciais decrescentes da vida útil do rolamento
em relação à densidade de corrente dada em Arms/mm² e em Apico/mm², onde são
considerados os patamares de densidade da corrente que não afetam a vida útil do rolamento,
de acordo com os dados aproveitados das pesquisas de (ENDO, 1978).
Fig. 3. 6: Vida útil do rolamento versus densidade de corrente, figura extraída a partir de (BUSSE, 1997).
A vida útil do rolamento influenciada pelo atrito mecânico das superfícies foi descrita
por (BONNETT, 1993), que estabeleceu a sua durabilidade na faixa de 40 e 60 mil horas.

41
No entanto, intensos testes e vários tipos de análises dos rolamentos foram executados
por (MUETZE, 2004, p. 1989-1995), após períodos curtos, médios e longos de
funcionamento dos motores de indução, acionados pelo conversor PWM, sendo proposto o
valor de densidade máxima de corrente inferior a 0.8 Apico/mm2 para os motores acionados
pelo conversor PWM, garantindo-se que tal valor não interfere na durabilidade dos
rolamentos.
Para verificar a vida útil do rolamento de um motor padronizado de 15 hp acionado
pelo conversor PWM, testes executados por (BUSSE, 1997, p. 567-576) mostraram que as
correntes de condução não degradavam a vida útil do rolamento e que os motores sem carga
mecânica eram mais sensíveis aos danos por correntes de descarga do que os motores
carregados nominalmente. A Tabela I, apenas a título de exemplo, mostra um resumo destes
testes que foram executados com a carga no rolamento representada pelo peso próprio do
rotor e por três vezes o peso próprio.
Tabela I - Vida elétrica útil do rolamento do motor de 15 hp acionado pelo conversor PWM.
Parâmetro Unidade Peso próprio do rotor 3.0 vezes o peso do rotor
Corrente de descarga (Apico) 2.2 2.2
Área de contato hertziana (mm2) 0.62 1.29
Densidade de corrente (Apico/mm2) 3.55 1.71
Vida útil calculada (hora) 0.157 1566.9
Corrente de condução (Apico) 0.2 a 0.5 0.2 a 0.5
Área de contato hertziana (mm2) 0.62 1.29
Densidade de corrente (Apico/mm2) 0.32 a 0.8 0.15 a 0.38
Vida útil calculada (hora) >144480.0 >1178200.0
A área de contato hertziana cujo valor era de 0.62 mm² para o peso próprio do rotor
alterou para 1.29 mm² quando o seu peso era três vezes maior. A densidade de corrente no
motor sem carga estava em torno de 3.55 Apico/mm², quando era aplicada uma corrente de
descarga de 2.2 Apico, estabelecendo a vida útil do rolamento em torno de nove minutos e
vinte segundos, aplicando-se a equação (3.2). Com o motor carregado, a densidade de
corrente diminui para 1.71 Apico/mm² e a vida útil do rolamento é ampliada para 1.56 mil
horas. O motor sem carga produz uma corrente de condução variando entre 0.2 e 0.5 Apico,
gerando densidades de correntes entre 0.32 e 0.8 Apico/mm², conduzindo a uma expectativa
de vida útil maior que 144.48 mil horas. O motor com carga produziu uma densidade entre
0.15 e 0.38 A/mm² e forneceu a expectativa de vida útil maior que 1.17 milhões de horas.
Pode-se concluir que a corrente de descarga reduz bastante a vida útil do rolamento, mesmo
para o melhor caso em que a densidade de corrente foi igual a 1.71 A/mm², resultando numa
expectativa da vida útil de 1.56 mil horas. Entretanto, este valor fica muito aquém das 20 mil

42
horas mínimas previstas pela equação (3.2). A corrente de condução não afeta a vida útil do
rolamento do motor de 15 hp, que pelo cálculo apresenta uma expectativa de vida superior a
144 mil horas, estimativa que está bem além do valor máximo previsto pela equação (3.2) que
é de 40 mil horas.
O tempo calculado da vida útil do rolamento deve ser atenuado pela dificuldade de se
determinar a área de contato AH, onde o pior caso é aquele que leva em conta a área AH de
uma única esfera do rolamento. No entanto, o índice de carga mecânica equivalente é
distribuído normalmente ao longo de três esferas do rolamento, aumentando a área de contato
durante a distribuição dos pulsos das correntes de descarga (MUETZE, 2004, p. 1989-1995).
3.5 Relação de Tensão do Rolamento - BVR
O circuito eletrostático mostrado na Fig. 3.7 é idêntico ao da Fig. 2.19, exceto que a
capacitância Ceq1 é explicitada como o equivalente do ramo paralelo constituído pelas
capacitâncias Cb, Cb1 e Cg, definida pela equação (3.3).
(3. 3)
Fig. 3. 7: Circuito básico para análise do comportamento das induções eletrostáticas.
A tensão Vcm é dividida entre os ramos paralelos de Cwf com o ramo série constituído
por Cwr e Ceqrp. A capacitância equivalente deste ramo série, denominada Ceqrs, é calculada
através da equação (3.4).
(3. 4)

43
A tensão sobre o rolamento, denominada Vb, é obtida pela equação (3.5), sendo igual à
tensão sobre a capacitância equivalente Ceq1, definida como o produto da corrente do ramo
série Irs por Xceq1 do respectivo ramo paralelo, onde f é a frequência da tensão aplicada.
(3. 5)
A tensão Vcm é o produto de Irs por Xeqrs utilizando-se (3.4), resultando em (3.6).
(3. 6)
Isolando-se Irs da equação (3.6) e substituindo-a em (3.5), obtém-se (3.7).
(3. 7)
A relação BVR é definida como a razão entre a tensão de rolamento Vb e a tensão
Vcm, podendo ser retirada de (3.7) e reescrita em (3.8).
(3. 8)
A relação BVR fornece algumas informações importantes sobre o fenômeno de carga
e descarga na capacitância do rolamento. Exemplo, para cada valor da tensão de rolamento
Vb, existe uma tensão limite Vth para o respectivo valor de espessura da película lubrificante,
abaixo do qual a ruptura dielétrica não ocorre, dependendo da duração dos pulsos e das
características da película de lubrificação. O valor estimado da tensão Vb é comparado com o
valor da tensão limite de ruptura Vth, determinando-se assim, a probabilidade de ocorrência da
corrente de descarga sobre o rolamento (CHEN, LIPO e FITZGERALD, 1996, p. 1365-1370).
A equação (3.8) também sugere que uma grande capacitância do rolamento reduz Vb. A
expressão de BVR mostra que se Cwr tender a zero, a tensão eletrostática sobre o rolamento
tende a se anular. A relação BVR acopla ao eixo do rotor não somente a amplitude, mas
também a variação temporal da tensão Vcm, como ilustra a Fig. 3.8, onde se observa que a
tensão Vcm apresenta o valor de 94.9 V entre os patamares, ao passo que a tensão Vb
apresenta o valor de 2.3 V, para as mesmas variações no tempo, obtendo-se, neste caso, o
valor de BVR igual a 2.47%.

44
(a)
(b)
Fig. 3. 8: (a) Forma de onda da tensão Vcm; (b) forma de onda da tensão Vb.
A equação (3.9) é válida para as relações de amplitude e de tempo entre as tensões
Vcm e Vb.
(3. 9)
0 1 2
x 10-4
-250
-200
-150
-100
-50
0
50
100
150
200
250
X: 6.567e-005Y: 142.6
Tensão (
V)
Tempo(s)
X: 0.0001Y: 47.67
Tensão Vcm
0 1 2
x 10-4
-6
-4
-2
0
2
4
6
X: 6.557e-005Y: 3.517
Tensão (
V)
Tempo(s)
X: 0.0001Y: 1.176
Tensão sobre o rolamento (Vb)

45
3.6 Relação de Estresse Elétrico do Rolamento - ωestresse
Os estragos causados nas superfícies das pistas dos rolamentos pelas correntes
elétricas são descritos como uma perfuração da película lubrificante, gerados por arcos
elétricos que produzem pequenas crateras na superfície metálica de tais pistas. As crateras e
os sulcos são formados pelo derretimento local do metal, devido à corrente de arco elétrico
(Iarc) ocorrendo com as esferas rolando e achatando tais crateras e sulcos continuamente,
criando mais crateras por mais fluxo de corrente local. A elevada densidade de corrente local
(J), juntamente com a condutividade elétrica do metal (k), desenvolvem uma potência elétrica
(P) no volume local (v), que são relacionados pela equação (P/v = J²/k), produzindo
temperaturas bastante elevadas e causando o derretimento metálico. A energia de fusão
metálica no rolamento (Warcb) é definida como o produto da tensão de arco (Varc), corrente de
arco (Iarc), duração do fluxo de corrente (tarc) e o número de eventos das correntes de arcos
(Narc), definida pela equação Warcb = Varc*Iarc*tarc*Narc. No entanto, foi percebido por
(MUETZE, 2004, p. 1989-1995) que o fator Narc era proporcional ao tempo de operação do
rolamento (top) e à frequência de comutação da ponte inversora PWM (fs), estabelecendo-se,
assim, a relação de estresse do rolamento, denominada ωestresse, resultante do produto da
densidade de corrente do rolamento (Jb), (top) e (fs), como mostra a equação (3.10).
(3. 10)
Como o produto de (top) e (fs) é adimensional, ωestresse representa a densidade de
corrente total que o rolamento suporta durante toda a sua vida útil, para os valores constantes
de Jb, top e fs. A título de ilustração, ωestresse pode ser calculado para Jb igual a 0.8 A/mm², fs
igual a 3 kHz e top de 20 mil horas (72 x 106 s), obtendo-se ωestresse = 0.17x10
12 A/mm².
Todavia, a equação (3.10) mostra que se a frequência de chaveamento da ponte inversora (fs)
é elevada para 20 kHz, o índice de estresse sobe para 1.15x1012
A/mm², com os mesmos Jb =
0.8 A/mm² e top = 20 mil horas. Se o rolamento suportar o índice de estresse de apenas
0.17x1012
A/mm², então, o tempo de operação do rolamento ou a sua vida útil é reduzida para
apenas três mil horas. No entanto, se for imprescindível que a ponte inversora PWM opere em
20 kHz e for possível exercer algum controle sobre a densidade de corrente, o tempo de
operação do rolamento pode ser ampliando novamente para 20 mil horas, se Jb for reduzida
para 0.118 A/mm². Essa ilustração mostra que o limite de densidade da corrente estabelecida

46
em 0.8 A/mm², depende da freqüência de chaveamento desenvolvida pela ponte inversora
PWM.
ωestresse também pode ser utilizado como um instrumento de avaliação da redução do
ácido carboxílico (COOH) na composição química da graxa de lubrificação, como indicativo
de sua degradação ou envelhecimento, questão que é bem detalhada por (MUETZE, 2004, p.
1989-1995).
3.7 Variáveis Mecânicas que Influenciam o Valor da Capacitância Cb
Nesta seção, a espessura da película de lubrificação, temperatura do rolamento,
viscosidade e aditivos do lubrificante são destacados como variáveis mecânicas que alteram o
valor instantâneo da capacitância Cb. Em seguida, a curva de Stribeck é examinada,
relacionando o coeficiente de atrito, desgaste mecânico dos rolamentos e hidrodinâmica do
lubrificante. Também é feita uma análise do desgaste mecânico e da probabilidade de
ocorrência das correntes de descarga, em função da espessura da película de lubrificação e da
porcentagem de tempo que tal película permanece entre as superfícies de contato.
3.7.1 Espessura da Película de Lubrificação e Temperatura do Rolamento
A espessura da película de lubrificação, denominada hlb, é de longe o elemento que
mais exerce influência sobre o valor da capacitância Cb, através da variação da distância entre
as esferas e pistas do rolamento. A hlb depende de muitas variáveis, tais como velocidade do
motor, viscosidade e elasticidade do lubrificante, raio equivalente de curvaturas, coeficiente
de pressão e carga mecânica (BUSSE, 1997, p. 577-584), (MAGDUN e BINDER, 2009, p.
1051-1056) e (WITTEK, 2010), como mostra a equação (3.11).
(3. 11)
Onde: u é função da velocidade dos elementos rolantes (u’), do módulo de elasticidade (E), da
viscosidade do lubrificante (η’) e do raio equivalente de curvaturas entre esferas e pistas (R’),
explícitos na equação [u = (η’*u’) / (E.R’)], desta forma, u influencia sobremaneira o valor de
hlb; g é função do produto entre o coeficiente de pressão (αp) e o módulo de elasticidade do
lubrificante (E), definido por (g = αp*E), proporcionando uma influência moderada sobre hlb;
Qz é função da força mecânica (P) que atua na esfera, bem como do módulo de elasticidade e
47
raio equivalente de curvaturas entre esferas e pistas, segundo a expressão Qz = P/[E* (R’)²],
como Qz é elevada a uma potência mais baixa, exibe menos influência sobre hlb.
Também, a temperatura do rolamento é uma grandeza física que atua indiretamente
nas variações de hlb, pois a sua alteração produz mudanças na viscosidade e elasticidade do
lubrificante, que por sua vez modificam hlb. Por outro lado, a temperatura depende das
características do lubrificante, tais como carga mecânica, velocidade do eixo e alinhamento
mecânico. A elevação da temperatura reduz a viscosidade do lubrificante e consequentemente
a espessura da película de lubrificação.
3.7.2 Viscosidade e Aditivos do Lubrificante
A variação da viscosidade da graxa de lubrificação no rolamento é inversamente
proporcional à variação do coeficiente de transferência de calor, ou seja, um aumento da
viscosidade da graxa de lubrificação diminui a propagação de calor do rotor para a carcaça do
motor, elevando a sua temperatura de equilíbrio e provocando a redução da espessura da
película de lubrificação. Portanto, a alteração da viscosidade da graxa produz algumas
modificações em hlb, que acarreta variações nos seguintes parâmetros:
1. Capacitância do rolamento;
2. Nível de tensão do eixo do rotor;
3. Correntes de descarga e condução nos rolamentos;
4. Coeficiente de transferência de calor;
5. Isolação térmica entre o rotor e carcaça do motor;
6. Coeficiente de atrito;
7. Desgaste mecânico do rolamento.
Deve ficar claro que o aumento da viscosidade do lubrificante prejudica o desempenho
do rolamento, porque fornece meios para a elevação de ocorrências das correntes de descarga.
Por outro lado, é benéfico para o desempenho mecânico do rolamento, visto que reduz o
coeficiente de atrito entre as partes rolantes. Então, há que se estudar um ponto de equilíbrio
dessa viscosidade que dê mais tempo de vida ao rolamento, minimizando a ocorrência do
atrito mecânico e a corrente de descarga. Além disso, deve-se pensar nas consequências da
alteração do ponto de equilíbrio térmico, causado pela variação do coeficiente de transferência
de calor entre o rotor e estator.

48
Os lubrificantes comerciais são complexas misturas de aditivos individuais escolhidos
pela relativa habilidade de combater a corrosão, atrito, desgaste ou outros processos de
degradação. A maioria dos rolamentos é lubrificada com graxa, sendo normalmente
constituída por um óleo mineral mantido dentro de um portador de sabão. O óleo mineral é
uma mistura de parafínicos, naftênicos e óleos aromáticos do petróleo. O cálcio, sódio, lítio,
complexo de alumínio e uréia são os portadores de sabão preferidos, tendo cada elemento uma
única aplicação. Numa investigação sobre os efeitos dos aditivos sobre o lubrificante,
verificou-se que a capacitância do rolamento é inversamente proporcional à concentração de
aditivos, num caso específico em que um ácido oleoso foi misturado ao óleo mineral (BUSSE,
1997, p. 567-576), (WANG e TUNG, 1990, p. 563-572).
Os tipos de graxas de lubrificação mais modernos utilizam a poliuréia como
espessante. Com isso, a graxa proporciona uma excelente lubrificação numa ampla faixa de
temperaturas, funcionando silenciosamente e mais livre de impurezas, o que aumenta a sua
longevidade.
3.7.3 Análise da Curva de Stribeck
Uma grande área de contato existente entre as pistas e as esferas num rolamento
parado ou movimentando em baixa velocidade, produz um contato quase-metálico perfurando
a película lubrificante, apresentando uma característica resistiva entre as superfícies de
contato, resultado da baixa resistência metálica do rolamento4. Esta ocorrência corresponde à
região de alto coeficiente de atrito da curva de Stribeck, que descreve a elevação do
coeficiente de atrito em função do aumento da capacidade hidrodinâmica do lubrificante,
definida por [(η’) *U / (P’)], onde U é a velocidade do eixo e P’ é a pressão sobre a película
lubrificante. A Fig. 3.9 mostra três regimes hidrodinâmicos presentes na curva Stribeck, que
podem ser descritos da seguinte forma:
Película limite – Nesta região existem contatos ásperos que resultam num elevado
desgaste mecânico com alto coeficiente de atrito em velocidades inferiores a 15 rpm,
registrando um baixo deslizamento;
Película variável ou mista – A carga entre as duas superfícies é suportada parcialmente
pela superfície áspera e película de lubrificação, resultando em um desgaste mecânico
moderado com a velocidade do eixo entre 15 e 90 rpm;
4 Devido, principalmente, aos curtos-circuitos instantâneos da capacitância Cb.

49
Fig. 3. 9: Curva de Stribeck para a análise de lubrificação, extraído a partir de (BUSSE, 1997).
Película hidrodinâmica – Nesta região, as duas superfícies são separadas por uma
película lubrificante completa, resultando um coeficiente de atrito e de desgaste
mecânico mínimos, em velocidades superiores a 90 rpm (BUSSE, 1997, p. 567-576).
A relação de desgaste mecânico do rolamento pode ser definida, também, em função
do percentual de tempo que as duas superfícies de contato rugoso ficam separadas por uma
determinada espessura de película lubrificante, como mostra a Fig. 3.10.
Fig. 3. 10: Porcentagem de tempo em função da relação Lambda (Λ), extraído a partir de (BUSSE, 1997).

50
O desgaste mecânico é convertido em uma porcentagem de tempo da ocorrência desta
película, em função de Lambda (Λ), que é a relação entre a espessura da película lubrificante
e o valor eficaz da superfície de contato rugoso. A vida útil do rolamento é baixa, se (Λ)
assumir um valor menor ou igual a 0.9, devido ao pequeno valor da hlb, que mesmo
permanecendo entre as superfícies durante 100% do tempo, produz o contato quase-metálico
entre elas. Entretanto, a ocorrência das correntes de descarga é bastante reduzida no
rolamento, pelo fato do eixo ser descarregado, continuamente, através das correntes não-
circulantes de condução. Existe a possibilidade do atrito superficial quase-metálico, se o valor
de (Λ) está entre 0.9 e 1.5, dependendo do percentual de tempo que hlb permaneça entre as
superfícies de contato, mas a ocorrência da corrente de descarga é aumentada efetivamente.
Se o percentual de tempo que hlb permanecer entre as superfícies de contato for superior a
40%, com (Λ) igual a 1.5, seguramente, haverá tempo para o carregamento do eixo,
aumentando, assim, a possibilidade de ocorrência das correntes de descarga no rolamento.
Para (Λ) maior que 3.8, hlb é grande, não importando a porcentagem de tempo em que ela
fique entre as superfícies de contato, porque raramente irá acontecer um contato quase-
metálico, mas os carregamentos capacitivos da película de lubrificação ocorrerão com muita
frequência (BUSSE, 1997, p. 567-576).
3.8 Rigidez Dielétrica e a Espessura da Película Lubrificante
As propriedades isolantes de qualquer material são dependentes de sua rigidez
dielétrica e da capacidade de resistir à alta tensão sem se romper. A rigidez dielétrica dos
lubrificantes é medida pela Sociedade Americana de Teste e Medida (ASTM) Norma D 877 e
se consiste de um teste estático com as placas condutoras separadas por 2.5 mm. Uma tensão
senoidal é aplicada entre as placas com uma taxa de variação em rampa de 3 kV/s, até que
uma corrente de fuga seja detectada. A rigidez dielétrica da película lubrificante do rolamento
tem o valor aproximado de 15 kV/mm (BUSSE, 1997, p. 567-576).
Uma corrente de descarga, que atravesse a película lubrificante, provoca corrosão e
crateras na superfície das pistas, conforme mostra a Fig. 3.11. Isso ocorre, principalmente, no
caso dos rolamentos que utilizam lubrificantes com alta resistividade ou viscosidade, de modo
que as tensões de eixo excedem em muito a tensão limite de ruptura Vth. Uma rigidez
dielétrica de 15 Vpico/μm e uma espessura da película lubrificante variando entre 0.2 e 2.0
μm produzem uma tensão limite Vth que estará entre 3 e 30 V de pico. Para um valor de BVR

51
igual a 2.47%, num sistema de acionamento alimentado por uma tensão eficaz de linha igual a
220 V, a tensão Vcm terá um valor, aproximadamente, igual ao da tensão do barramento c.c.
dividido por dois, neste caso, Vcm ≈ 148.5 V. Portanto, a tensão sobre o rolamento assumirá
um valor em torno de 3.6 V, estando dentro do intervalo de tensões Vth que produzem
correntes de descarga. Os detritos dentro do lubrificante e os contaminantes químicos
causados pelos desgastes mecânicos ou correntes elétricas alteram a condutividade, rigidez
dielétrica e outras propriedades elétricas da graxa, que em casos extremos pode transformá-la
em uma graxa condutora (BUSSE, 1995, p. 698-705).
Fig. 3. 11: Marcas microscópicas de arcos elétricos na pista interna do rolamento, figura extraída a partir de
(BELL, 1998).
3.9 Conclusões
Os principais fatores que alteram as correntes de alta frequência nos rolamentos foram
examinados neste capítulo, onde se constatou que a impedância do rolamento apresenta
características predominantemente resistivas, quando ocorrem os contatos quase-metálicos
entre as suas partes rolantes. Este fato pode ocorrer tanto pelas baixas velocidades do eixo
quanto pelo aumento da carga mecânica que é imposta aos rolamentos. Isto também é
justificado pelo deslocamento da linha de centro do eixo da posição vertical simétrica, na
direção e sentido da aceleração da gravidade, que pressiona os elementos rolantes na sua parte
inferior. Todos esses fatores contribuem para a redução de hlb, de forma que a impedância

52
resultante apresenta características mais resistivas. À medida que a velocidade aumenta,
notadamente a partir de 90 rpm, a linha de centro do eixo se torna simétrica, diminuindo a
capacitância do rolamento e aumentando o nível de tensão acumulado no eixo. A resistência
do rolamento (Rb) é admitida como invariável, assumindo os baixos valores dos momentos
em que ocorrem os contatos quase-metálicos entre as esferas e pistas.
As áreas de contato entre as superfícies das esferas e pistas são determinadas
analiticamente com base na teoria do ponto de contato hertziano, que considera a área elíptica
como resultante do acoplamento entre as superfícies. No entanto, estas superfícies de contato
apresentam ondulações e rugosidades que tornam a área de contato (AH) instável. As
quantidades intermediárias associadas às dimensões principais da elipse fazem parte das
equações que delineiam as áreas (AH), retratando as tais irregularidades superficiais. No
entanto, devido a isso, apresentam certa complexidade para serem determinadas.
A densidade de corrente no rolamento é considerada como o melhor parâmetro para
avaliar os danos que nele ocorrem como consequência das correntes de alta frequência. A
equação da vida útil do rolamento é um bom auxiliar na análise de sua durabilidade, através
da comparação com os valores pré-estabelecidos da vida útil. O comportamento elétrico do
rolamento é avaliado em função da carga mecânica imposta ao eixo, onde se concluí que os
motores operando em vazio são mais suscetíveis aos danos causados pelas correntes de
descarga. Além disso, constata-se que as correntes de descarga são mais prejudiciais aos
rolamentos do que as correntes de condução.
A relação de tensão BVR do rolamento é apontada como o parâmetro que quantifica a
probabilidade de ocorrência da corrente de descarga nos rolamentos, visto que correlaciona
amplitude e a variação temporal da tensão Vcm com a tensão (Vb) induzida sobre o eixo.
O ωestresse estabelece o valor da densidade de corrente total que o rolamento é capaz de
suportar durante toda a sua vida útil. Tal índice apresenta dependência em relação à densidade
de corrente, tempo de operação e frequência de chaveamento da ponte inversora PWM. Este
índice alerta para o fato de que o valor da densidade de corrente aceito como seguro para os
rolamentos, na realidade é dependente da frequência de chaveamento do inversor PWM e
coloca em suspeição o valor de densidade igual a 0.8 A/mm², convencionalmente aceito como
um valor incapaz de afetar o desempenho mecânico dos rolamentos nos motores acionados
pelos conversores PWM.
A espessura hlb é examinada analiticamente e mostra-se dependente da velocidade do
eixo, viscosidade do lubrificante, coeficiente de pressão sobre a película de lubrificação, raio
equivalente de curvaturas e módulo de elasticidade do lubrificante, numa proporção direta.

53
Entretanto, tal espessura da película de lubrificação varia inversamente com a carga mecânica
que atua sobre as esferas.
A temperatura do rolamento agindo diretamente sobre a viscosidade e módulo de
elasticidade do lubrificante é apontada como um agente indireto que altera a espessura da
película de lubrificação. No entanto, a temperatura do rolamento é também modificada pela
variação da viscosidade do lubrificante, carga mecânica no rolamento, velocidade do eixo e
alinhamento mecânico. A viscosidade do lubrificante e o coeficiente de transferência de calor
variam em proporção inversa, produzindo efeitos na espessura da película de lubrificação,
capacitância Cb, tensão de eixo, correntes de descarga, desgaste mecânico e isolação térmica
entre o rotor e a carcaça.
Os aditivos apresentam qualidades específicas para os lubrificantes no sentido de
reduzir a corrosão e o desgaste dos rolamentos. Todavia, de acordo com a bibliografia
pesquisada, tem-se que o aumento da concentração de aditivos reduz a capacitância do
rolamento.
A curva de Stribeck é analisada em função do coeficiente de atrito, velocidade do eixo,
viscosidade do lubrificante e pressão sobre a película de lubrificação, apresentando três
regiões de operação do rolamento, onde ocorrem desgastes mecânicos severos, moderados e
suaves, respectivamente, à medida que a velocidade do eixo aumenta. Antagonicamente, os
prejuízos causados pelas correntes de descarga é suave, moderado e severo com o crescente
aumento da velocidade do eixo, respectivamente.
A rigidez dielétrica de 15 V/µm é estabelecida para uma faixa limite da tensão de
ruptura entre 3 e 30 V, considerando-se o intervalo de ocorrência da espessura da película
lubrificante entre 0.2 e 2 µm. As impurezas e detritos contidos na graxa de lubrificação
também são apontados como agentes modificadores das características elétricas da graxa.

Capítulo 4 – Modelagens do Motor de
Indução Apropriadas Para o Estudo dos
Fenômenos de Alta Frequência
4.1 Considerações Iniciais
O presente capítulo disserta sobre modelos matemáticos apropriados para a
representação do motor diante dos fenômenos de alta frequência abordados nessa dissertação.
Após uma ampla revisão bibliográfica, oito modelagens foram selecionadas, cujo
detalhamento é apresentado ao longo deste capítulo. Em função da facilidade de obtenção dos
seus parâmetros e da capacidade de representar, com mais exatidão, os fenômenos aqui
estudados, elegeu-se uma delas para o desenvolvimento das simulações computacionais, cujos
resultados serão apresentados no capítulo 5.
4.2 Modelagem com Parâmetros Concentrados
Dentre as referências estudadas, a modelagem mais simples para o circuito de
sequência zero do motor de indução trifásico é mostrada na Fig. 4.1 (CHEN e FITZGERALD,
1996, p. 25-32). Tal modelagem é utilizada somente para observar a ocorrência das correntes
não-circulantes de condução acopladas para os núcleos do rotor e estator. Os rolamentos são
modelados simplesmente pela chave Sw, cujo contato é ligado em paralelo com a capacitância
Cg. Como limitação deste modelo, pode-se destacar a ausência efetiva das capacitâncias dos
rolamentos, que implica numa capacitância equivalente do ramo igual ao valor de Cwr e uma
relação BVR igual a zero, no momento que a chave Sw está com o contato fechado, pois a
tensão (Vb) sobre os rolamentos se anula; por outro lado, quando o respectivo contato está
aberto, a tensão (Vb) ocorre em função apenas da capacitância Cg, obtendo-se neste caso, um
valor resultante inferior ao da capacitância equivalente que inclui as respectivas capacitâncias
dos rolamentos, acarretando uma relação BVR acima do valor real. Portanto, em ambos os
casos, a medição indireta da relação BVR é corrompida ao se desprezar as capacitâncias dos

55
rolamentos. Além disso, nenhuma orientação foi dada para a determinação ou medição dos
respectivos parâmetros da modelagem (CHEN e FITZGERALD, 1996, p. 25-32). Por estas
razões, tal modelagem não foi utilizada nas simulações executadas no capítulo 5.
Fig. 4. 1: Modelo com parâmetros concentrados inversor /motor, figura extraída a partir de (CHEN e
FITZGERALD, 1996).
4.3 Modelagem de Modo Comum para a Análise do Comportamento do
Rolamento
A modelagem de sequência zero, mostrada na Fig. 4.2, descreve um sistema de
acionamento constituído pelo conversor PWM, cabos de alimentação e motor de indução
trifásico, incluindo eixo e rolamentos (BUSSE, 1997, p. 577-584) e (KERKMAN, 1997, p.
567-576).
Fig. 4. 2: Modelo de sequência zero do sistema de acionamento, figura extraída a partir de (KERKMAN, 1997).

56
O conversor de frequência é reduzido a uma tensão de sequência zero aplicada do
ponto neutro do enrolamento trifásico para o solo. Os cabos de alimentação, bobinas de modo
comum e os reatores de linha são representados pelas impedâncias série Zsérie e paralelo
Zparalelo, de forma a tornar possível a análise dos efeitos desses elementos sobre a tensão de
eixo. A indutância e resistência de modo comum do enrolamento trifásico são denominadas
L0 e R0, respectivamente. O restante da modelagem é a combinação das capacitâncias Cwf, Cwr
e Cg, associada ao modelo do rolamento, que é constituído pela resistência Rb em série com o
ramo paralelo formado pela capacitância Cb e a impedância Znl. Estes parâmetros são medidos
experimentalmente, como é descrito sucintamente a seguir:
1. A impedância de sequência zero do motor é igual a um terço da resistência do estator
(R0) em série com um terço da indutância de dispersão do estator (L0). As três linhas
do estator foram curto-circuitadas e a medição da impedância foi executada com um
medidor LCR do ponto de curto-circuito para o ponto neutro da ligação estrela do
enrolamento trifásico;
2. A medição da capacitância do enrolamento do estator para a carcaça (Cwf) foi realizada
com um medidor LCR ao se remover o rotor para que os efeitos de Cwr, Cg e Cb
fossem eliminados;
3. A medição da capacitância do enrolamento do estator para o núcleo do rotor (Cwr) foi
realizada conectando-se o eixo à carcaça do motor, por meio de um condutor. Um
terminal do medidor LCR foi conectado aos três terminais unidos do enrolamento do
estator e o outro terminal do medidor à carcaça do motor. Para se obter o valor da
capacitância Cwr, o valor da capacitância Cwf foi subtraído do valor da capacitância
obtido pelo medidor LCR;
4. A capacitância dos rolamentos (Cb) depende das condições específicas de operação do
motor. Entretanto, numa primeira aproximação, foram realizadas medições em um
rolamento segmentado, cujos valores da rigidez dielétrica da película lubrificante e da
pressão de contato entre as pistas e esferas eram conhecidos;
5. A medição da capacitância existente entre os núcleos do rotor e estator (Cg) foi
executada indiretamente. Uma vez conhecido o valor de Cb, executou-se a medição da
capacitância do rotor para a carcaça e subtraiu-se o valor da capacitância Cb. Neste
caso, o predomínio do valor da capacitância Cwf foi reduzido.
Este modelo de sequência zero permite verificar as sobretensões nos terminais do
motor e as formas de onda das tensões e correntes nos acoplamentos de alta frequência, bem
como obter uma relação BVR mais próximo do real. Através desta modelagem, é possível

57
verificar as correntes não-circulantes de descarga, originando de Cwr em direção à Cb e as
circulantes de descarga, fluindo de Cg para Cb. No entanto, tal modelo foi descartado devido à
ausência de um melhor detalhamento da correlação entre o valor da ruptura dielétrica da graxa
de lubrificação e a pressão de contato entre esferas e pistas dos rolamentos para a
determinação da capacitância Cb, também, por causa da indisponibilidade de um medidor
LCR (trata-se de um equipamento de elevado custo e, portanto, de acesso restrito ao
pesquisador/engenheiro).
4.4 Modelagem para a Análise Modal
A modelagem para a análise modal combina o circuito do rolamento com o circuito do
sistema conversor-motor, permitindo que as tensões e correntes originadas do conversor
sejam analisadas através dos circuitos de sequência zero, positiva e negativa, conforme mostra
a Fig. 4.3 (SKIBINSKI, 1995, p. 250-259). Nesta proposta, o conversor PWM é modelado
como três linhas de tensão para o ponto neutro, que também é ligado à fonte de tensão Vcm.
O motor é representado pelos conjuntos de enrolamentos trifásicos do estator e rotor,
respectivamente. A capacitância (Cwf) é concentrada a partir do ponto neutro do enrolamento
do estator e a capacitância (Cwr) é conectada ao estator e ao circuito de sequência zero do
rotor, incluindo os terminais de Cg, Rb e o ponto neutro do enrolamento do rotor. O circuito do
rolamento fornece o caminho de retorno ao ponto negativo da tensão Vcm, a partir do eixo do
rotor, passando por Rb e pela conexão em paralelo da capacitância do rolamento com sua
impedância não-linear.
Fig. 4. 3: Modelo conversor-motor-rolamento, figura extraída a partir de (SKIBINSKI, 1995).

58
O fato que impede a aplicabilidade dessa modelagem está na inexistência de um
procedimento para a determinação dos parâmetros do modo diferencial dos enrolamentos do
estator e rotor, por fase. Essa modelagem não foi empregada nas simulações executadas no
capítulo 5, pelos seguintes motivos:
Os parâmetros do circuito eletrostático do motor são obtidos de acordo com as
descrições de aquisição da seção 4.3. Portanto, ocorrem as mesmas restrições para a
determinação de tais parâmetros;
Não há uma descrição de procedimentos para se determinar os parâmetros do modo
diferencial dos enrolamentos do estator e rotor.
4.5 Modelagem com Resposta em Frequência até a Rádio Frequência - RF
A proposta desta modelagem é a de ampliar a resposta em frequência até a faixa de
rádio frequência, utilizando-se os parâmetros distribuídos de alta frequência dos enrolamentos
trifásicos do estator e rotor. A modelagem do enrolamento do estator é realizada através de
seções π com parâmetros concentrados, sendo sugerida a utilização de pelo menos cinco
destas seções π, conectadas em série (HALKOSAARI e TUUSA, 1999, p. 959-964). A Fig.
4.4 apresenta uma única seção π, como parte constituinte desse modelo.
Fig. 4. 4: Modelo do motor para resposta até a rádio frequência, figura extraída de (HALKOSAARI e TUUSA,
1999).

59
Nessa modelagem é recomendada a medição da indutância de dispersão do estator
(Lsl), resistência do estator (Rs) e a capacitância do enrolamento do estator para a carcaça
aterrada do motor (Csg) na frequência fundamental. A capacitância entre as espiras das
bobinas de uma mesma fase do estator, denominada (Cw), é determinada por aproximação,
justificando-se apenas que a sua medição exigiria a separação do enrolamento do estator do
seu próprio núcleo, não sendo apresentado o modo de obter tal aproximação. As resistências
RLsl e RLrl que descrevem as perdas, em alta frequência, nos respectivos enrolamentos do
estator e rotor, sendo incluído somente em RLsl o efeito de proximidade e pelicular, sem a
ocorrência de uma descrição dos procedimentos para a obtenção de ambas as resistências,
relatando-se apenas que devem ser selecionadas para a faixa de frequência de interesse. Para
a indutância de dispersão do rotor (Lrl) e a resistência do rotor (Rr), não são fornecidos
procedimentos ou descrições para obtê-los, sendo citado que tais parâmetros respondem à
freqüência fundamental. Por último, também não é informado o meio de obtenção da
resistência (Rsg) que dissipa uma potência adicional, devido ao fluxo das correntes de alta
frequência pela capacitância Csg.
Esta modelagem teve o mérito de ser a primeira a considerar os enrolamentos
trifásicos do estator e rotor, além de permitir a aplicação da tensão PWM diretamente nos
terminais do motor. No entanto, não foi utilizada nas simulações deste trabalho, porque não
foram descritas a forma de obtenção dos parâmetros citados acima, dificultando a sua
aplicação prática.
4.6 Modelagem com Resposta em Frequência até a Faixa de MHz
Esta modelagem propõe a resposta em frequência até a faixa de MHz e para atingir tal
objetivo, consideram-se os três enrolamentos de fase do motor, como se fossem linhas de
transmissão de múltiplos condutores. Os parâmetros do enrolamento do motor, por fase, são
constituídos pela resistência (Rem), indutância (Lem) e capacitância (Cem), respectivamente. A
tensão Vcm é acoplada do enrolamento trifásico para o núcleo do estator em duas direções:
1. Carcaça aterrada, através da capacitância (Cel);
2. Entreferro, por meio da capacitância (Cee).
As capacitâncias entre as chapas no núcleo do estator são definidas em direção à
carcaça como (Celf) e em direção ao entreferro como (Cele). Os segmentos da carcaça são
representados pela resistência (Rf) em série com a indutância (Lf), a capacitância (Clf) conecta
a carcaça ao núcleo do estator. No lado do rotor, a resistência (Rsr) em série com a
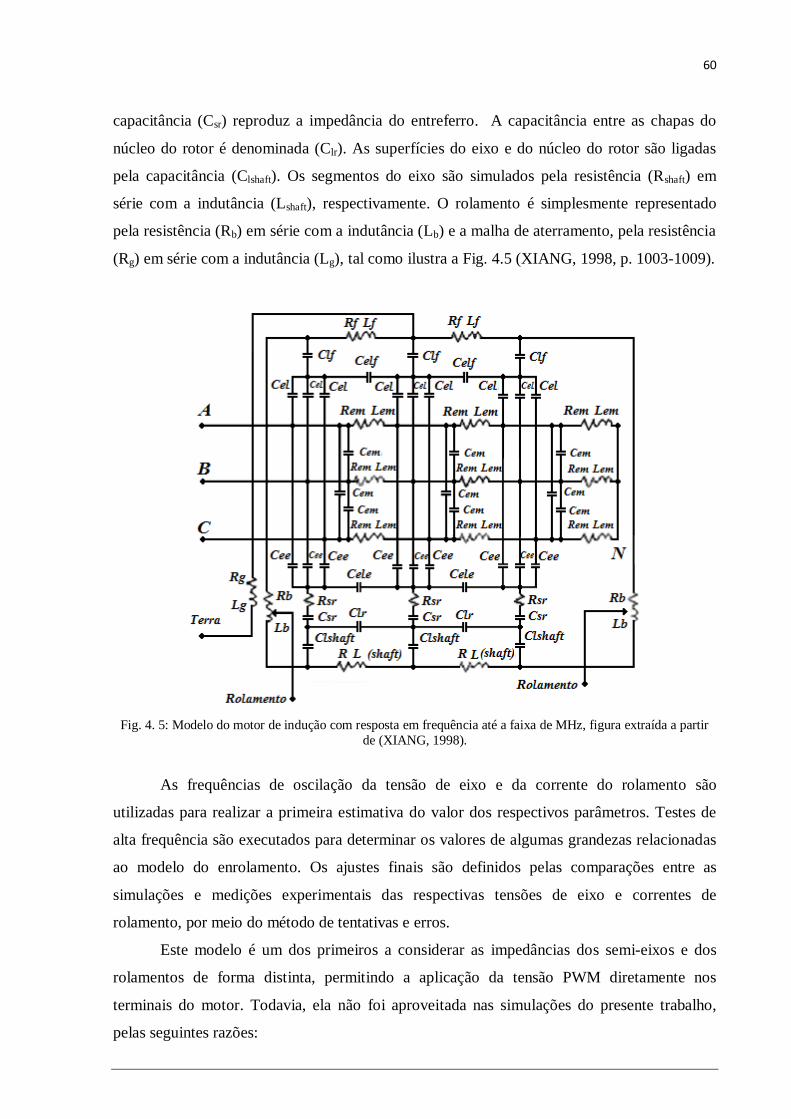
60
capacitância (Csr) reproduz a impedância do entreferro. A capacitância entre as chapas do
núcleo do rotor é denominada (Clr). As superfícies do eixo e do núcleo do rotor são ligadas
pela capacitância (Clshaft). Os segmentos do eixo são simulados pela resistência (Rshaft) em
série com a indutância (Lshaft), respectivamente. O rolamento é simplesmente representado
pela resistência (Rb) em série com a indutância (Lb) e a malha de aterramento, pela resistência
(Rg) em série com a indutância (Lg), tal como ilustra a Fig. 4.5 (XIANG, 1998, p. 1003-1009).
Fig. 4. 5: Modelo do motor de indução com resposta em frequência até a faixa de MHz, figura extraída a partir
de (XIANG, 1998).
As frequências de oscilação da tensão de eixo e da corrente do rolamento são
utilizadas para realizar a primeira estimativa do valor dos respectivos parâmetros. Testes de
alta frequência são executados para determinar os valores de algumas grandezas relacionadas
ao modelo do enrolamento. Os ajustes finais são definidos pelas comparações entre as
simulações e medições experimentais das respectivas tensões de eixo e correntes de
rolamento, por meio do método de tentativas e erros.
Este modelo é um dos primeiros a considerar as impedâncias dos semi-eixos e dos
rolamentos de forma distinta, permitindo a aplicação da tensão PWM diretamente nos
terminais do motor. Todavia, ela não foi aproveitada nas simulações do presente trabalho,
pelas seguintes razões:
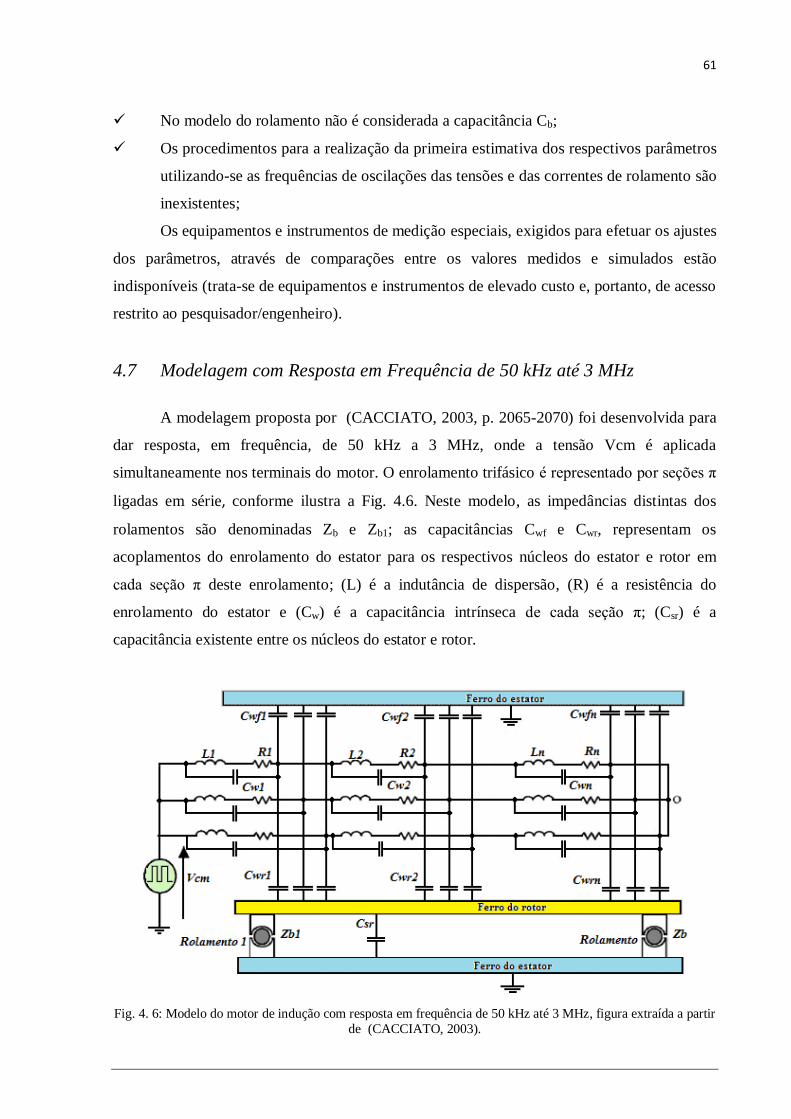
61
No modelo do rolamento não é considerada a capacitância Cb;
Os procedimentos para a realização da primeira estimativa dos respectivos parâmetros
utilizando-se as frequências de oscilações das tensões e das correntes de rolamento são
inexistentes;
Os equipamentos e instrumentos de medição especiais, exigidos para efetuar os ajustes
dos parâmetros, através de comparações entre os valores medidos e simulados estão
indisponíveis (trata-se de equipamentos e instrumentos de elevado custo e, portanto, de acesso
restrito ao pesquisador/engenheiro).
4.7 Modelagem com Resposta em Frequência de 50 kHz até 3 MHz
A modelagem proposta por (CACCIATO, 2003, p. 2065-2070) foi desenvolvida para
dar resposta, em frequência, de 50 kHz a 3 MHz, onde a tensão Vcm é aplicada
simultaneamente nos terminais do motor. O enrolamento trifásico é representado por seções π
ligadas em série, conforme ilustra a Fig. 4.6. Neste modelo, as impedâncias distintas dos
rolamentos são denominadas Zb e Zb1; as capacitâncias Cwf e Cwr, representam os
acoplamentos do enrolamento do estator para os respectivos núcleos do estator e rotor em
cada seção π deste enrolamento; (L) é a indutância de dispersão, (R) é a resistência do
enrolamento do estator e (Cw) é a capacitância intrínseca de cada seção π; (Csr) é a
capacitância existente entre os núcleos do estator e rotor.
Fig. 4. 6: Modelo do motor de indução com resposta em frequência de 50 kHz até 3 MHz, figura extraída a partir
de (CACCIATO, 2003).

62
Um procedimento para estabelecer os parâmetros desta modelagem se consiste em
identificar os caminhos das correntes de alta frequência, em duas etapas:
1. Realizando medições em frequências diferentes no intervalo de 50 kHz até 3 MHz,
cujos resultados são utilizados para obter a modelagem do caminho desejado, de forma
analítica;
2. Calcular a admitância para cada frequência solicitada e em seguida, determinar a
função de transferência do caminho de alta frequência considerado.
O procedimento automático de medição emprega, adequadamente, uma interface
computacional (GPIB) entre o instrumento de medição e o computador. O sistema de medição
é composto por um PC, gerador de sinal senoidal, amplificador linear de alta frequência (HF)
e osciloscópio digital, que são associados às sondas de tensão e corrente. A bancada de teste é
isolada eletricamente e preparada para analisar os caminhos das correntes de alta frequência
no motor. Tal sistema utiliza um motor de indução padrão, acionado na velocidade nominal
por um motor auxiliar, cujos eixos são isolados eletricamente. Após a injeção do sinal de alta
frequência, é possível identificar uma resposta em frequência, nos seguintes trechos: a) dos
enrolamentos de fase para a carcaça; b) do eixo para a carcaça, através da inserção de um
conjunto porta-escovas e escova. A Fig. 4.7 mostra o esquema do circuito elétrico equivalente
do motor para as correntes de modo comum, onde Zbi e Zbc são as impedâncias do rolamento,
que simulam o momento em que a pista externa é isolada ou conectada à pista interna.
Fig. 4. 7: Esquema do modelo de HF para frequências de 50 kHz até 3 MHz, figura extraída a partir de
(CACCIATO, 2003).

63
A distribuição não-linear da tensão sobre o enrolamento trifásico é também
considerada nesta modelagem, de forma que a maior queda de tensão ocorre na primeira
bobina de cada fase. Deste modo, o circuito da Fig. 4.7 é simplificado, ao se considerar
apenas a impedância da primeira bobina de cada fase, conforme mostra a Fig. 4.8. Neste caso,
a modelagem continua sendo válida para a faixa de frequência proposta.
Fig. 4. 8: O modelo proposto de HF para frequências de 50 kHz a 3 MHz, figura extraída a partir de
(CACCIATO, 2003).
Os parâmetros Zw, Zwf, Zbi e Zbc da modelagem simplificada da Fig. 4.8 são obtidos
empregando-se os instrumentos de medição que operam na faixa de frequência exigida e ao
desmontar o motor, extraindo-se o rotor para realizar as seguintes medições:
1. Impedâncias Zw e Zwf localizadas no estator, onde Zw é a impedância própria do
enrolamento trifásico e Zwf a impedância do enrolamento trifásico para o núcleo do
estator;
2. Impedâncias Zbi e Zbc dos respectivos rolamentos, situados no rotor.
A capacitância concentrada Csr, que acopla os núcleos do rotor e estator é calculada
analiticamente, por aproximação, aplicando-se a equação do capacitor de placas cilíndricas.
No entanto, não foi dada a descrição para a obtenção da impedância Zwr.
Esta modelagem não foi aplicada nas simulações executadas neste trabalho, em virtude
da indisponibilidade da maioria dos equipamentos envolvidos no processo de medição e de
aquisição de dados dos caminhos de interesse, bem como a falta de detalhamento para a
obtenção dos parâmetros Csr e Zwr.

64
4.8 Modelagem com Resposta em Frequência na Faixa de kHz até MHz
Esta modelagem propõe a utilização de apenas uma seção π, para simular as respostas
em frequência do motor de indução, na faixa de kHz até MHz, conforme mostra a Fig. 4.9
(GUBIA, 2005, p. 45-49) e (GUBIA, 2002, p. 1144-1149).
Fig. 4. 9: Modelagem do motor de indução para a faixa de frequência de kHz até MHz, figura extraída a partir de
(GUBIA, 2002).
Em tal modelagem, a capacitância nos terminais do motor, denominada Csg, é sempre
menor que Cng e representa a capacitância distribuída nas primeiras espiras das bobinas de
cada fase, sendo excitada durante as variações da tensão Vcm. A capacitância Cng é
estabelecida do ponto neutro do enrolamento trifásico para a terra e representa a capacitância
distribuída do restante das espiras. Rcm e Csn representam, respectivamente, a resistência e a
capacitância existentes entre as espiras das bobinas de uma mesma fase; Lcm e Rscm simulam a
indutância de dispersão e a resistência do enrolamento de fase, respectivamente, sendo Rscm
medido diretamente em cada fase do enrolamento. Os cálculos dos parâmetros Rcm, Lcm, Cng e
Csg são feitos analiticamente e dependem da obtenção e interpretação das formas de onda da
tensão Vcm e da corrente de modo comum, em suas transições de subida, permitindo a
determinação da frequência natural de oscilação e do coeficiente de amortecimento das

65
grandezas envolvidas. Os procedimentos para a determinação de tais parâmetros são
mostrados com mais detalhes no apêndice B.
Esta modelagem não foi selecionada para a realização das simulações deste trabalho,
porque não associa a modelagem do enrolamento trifásico ao modelo do eixo e rolamentos,
além disso, os equipamentos e instrumentos necessários para as medições têm custos
elevados, sendo restrita a sua utilização pelos pesquisadores de modo geral.
4.9 Modelagem Universal do Motor de Indução Trifásico
A modelagem universal do motor de indução trifásico foi proposta para responder em
frequência, na faixa de 10 Hz até 10 MHz (MIRAFZAL, 2006, p. 423-433). Tal modelagem
associa, em um único circuito equivalente trifásico, os modelos de modo comum, modo
diferencial, eixo e rolamentos, sendo uma extensão do circuito T-equivalente de baixa
frequência da norma (IEEE STD 112, 2004). No apêndice C, esta modelagem é descrita com
mais detalhes e na Fig. 4.10 é mostrado o modelo de fase do enrolamento, associado ao eixo e
rolamentos.
Fig. 4. 10: Modelagem universal do motor de indução, por fase, figura extraída a partir de
(MIRAFZAL, 2006).
Os procedimentos para a obtenção dos parâmetros dessa modelagem são dados a
seguir:

66
1. Rs: é a resistência do estator medida diretamente nos terminais dos enrolamentos de
fase do estator, na frequência fundamental (50/60 Hz);
2. Rcore: é a resistência de magnetização ou dos núcleos do estator e rotor que dissipa a
potência por histerese e correntes de Foucault (Phf), podendo ser determinada pela
expressão empírica (4.1), onde hp é a potência nominal do motor dada em [hp];
(4. 1)
3. Rr, Lls, Lm e Llr: são, respectivamente, a resistência do enrolamento do rotor,
indutância de dispersão do enrolamento do estator, indutância de magnetização e
indutância de dispersão do rotor, sendo obtidas através da solução do circuito T-
equivalente, na frequência fundamental (50/60 Hz);
4. ηLls: é a indutância de dispersão das primeiras espiras das bobinas de fase do estator,
sendo calculada, de forma aproximada, através da expressão (4.2);
(4. 2)
5. Cwf-total: é igual à soma de todas as capacitâncias (Cwf) que estão localizadas entre os
condutores do enrolamento e o núcleo do estator, como ilustra a Fig. 4.11.
Fig. 4. 11: (a) Ilustra as capacitâncias Cwf, Cg e Cwr em uma parte da seção transversal do motor; (b)
mostra o detalhe da ranhura do estator envolvendo os parâmetros utilizados no cálculo da capacitância
concentrada por ranhura Cwf-slot, figuras extraídas a partir de (MIRAFZAL, 2006).

67
Como Cwf-total é calculada a partir da geometria da ranhura do núcleo do estator, cada
ranhura pode ser considerada, aproximadamente, como um condutor de forma
retangular com a largura média (Wslot), profundidade média (dslot) e comprimento (Lfe)
do núcleo do estator. Considerando que todos os lados deste condutor estejam num
mesmo potencial, o valor da capacitância (Cwf-slot), existente entre os condutores do
enrolamento e o núcleo do estator em cada ranhura, pode ser obtido através da
equação (4.3).
(4. 3)
Onde: εo é a constante de permissividade do vácuo; Lslot é o perímetro interno de cada
ranhura do estator, que para uma ranhura perfeitamente retangular, é igual ao dobro da
profundidade (dslot) somado à largura média da ranhura (Wslot). Mas, devido à forma
geométrica abaulada da ranhura, é necessária uma compensação no cálculo deste
perímetro, através do aumento de 50% da dimensão (Wslot). Tal perímetro é calculado
pela expressão (4.4);
(4. 4)
Kt é o fator de correção da espessura do papel isolante devido ao aumento da espessura
do isolante na região próxima à abertura da ranhura (1.0 < kt < 1.5). Tal espessura é
dobrada ao longo de uma parte da parede interna da ranhura do estator, tendo um valor
igual a 2*δ1; lfe é o comprimento do núcleo do estator ou da sua pilha de chapas; δ1 é a
espessura do papel isolante entre a parede interna da ranhura e os condutores, com o
valor típico definido no intervalo (0.38 < δ1 < 0.63 mm); δ2 é a espessura do verniz
isolante do condutor (0.02 < δ2 < 0.05 mm), com as respectivas permissividades
relativas εr1 (3.0 < εr1 < 3.2) e εr2 (3.5 < εr2 < 4.0); δ3 é o possível espaço de ar aleatório
entre o papel isolante e a parede interna da ranhura (0.02 < δ3 < 0.3 mm), cuja
permissividade relativa é εr3 ≈ 1. Para um motor com um número de ranhuras do
estator (Ns), a capacitância Cwf-total é calculada pela equação (4.5);
(4. 5)

68
6. Cwf-effective: é a capacitância efetiva do enrolamento de fase para o núcleo do estator das
primeiras espiras das bobinas de uma mesma fase, que tem funcionalidade apenas para
os sinais de alta frequência. Tal capacitância depende do valor de Cwf-slot e do tipo de
conexão do enrolamento do estator. A conexão, em triângulo, do enrolamento do
estator apresenta em cada terminal de aplicação da tensão, duas entradas para as
primeiras espiras das bobinas de fase, em ranhuras distintas:
a) Na fase R, os terminais de números 1 e 5, do início do enrolamento da fase R e
final do enrolamento da fase S, duplicam o valor de Cwf-effective, pois cada ranhura
representa uma unidade de Cwf-slot na entrada da respectiva fase, conforme ilustra a
Fig. 4. 12;
Fig. 4. 12: O tipo de conexão do enrolamento trifásico do estator altera o valor da capacitância Cwf-effective.
b) Na fase S, estão conectadas as terminações de números 2 e 6, do início do
enrolamento da fase S e final do enrolamento da fase T;
c) Na fase T, terminais de números 3 e 4, do início do enrolamento da fase T e
final do enrolamento da fase S. Assim, em cada fase, Cwf-effective terá um valor igual ao
dobro do valor da capacitância Cwf-slot.
Se o enrolamento do motor estiver ligado em estrela, as capacitâncias Cwf-slot dos
terminais de números 4, 5 e 6, que penetravam em ranhuras distintas são anuladas pelo
desligamento da conexão em triângulo, sendo tais terminais curto-circuitados na
conexão em estrela. Neste caso, em cada fase, Cwf-effective terá valor idêntico ao da
capacitância Cwf-slot.

69
7. Cwf-0: é o restante da capacitância de modo comum concentrada entre o ponto neutro
do enrolamento trifásico e o núcleo do estator, cujo valor é um terço da diferença entre
a capacitância Cwf-total e três vezes a capacitância Cwf-effective, de acordo com a equação
(4.6);
(4. 6)
8. Cws: é a capacitância que existe entre as espiras das bobinas de uma mesma fase, é
determinada de forma heurística, baseando-se em vários testes que realizados em mais
de 50 motores diferentes (MIRAFZAL, 2006, p. 423-433). Em tais testes, se observou
que tal capacitância preserva a relação entre a primeira e a segunda frequências de
ressonância, associada ao valor da capacitância Cwf-effective. Também, verificou-se que a
segunda frequência de ressonância é igual ao dobro ou menos do valor da primeira
frequência de ressonância. Então, Cws é calculada em função da capacitância Cwf-effective
e da primeira e da segunda frequências de ressonância, conforme mostra a equação
(4.7);
(4. 7)
9. Rws: é a resistência de amortecimento do enrolamento do estator, que ocorre entre as
espiras das bobinas de uma mesma fase, sendo obtida através da medição da
impedância do modo diferencial, na primeira ressonância;
10. μRs: é a resistência de amortecimento que representa a parte fracionária da resistência
(Rs), devido à segmentação do enrolamento do estator, através de ηLls. Em 50/60 Hz,
μRs é calculada utilizando-se a equação (4.8). O fator de multiplicação, situado entre
10 e 20, é posteriormente aplicado em μRs para compensar os efeitos de proximidade e
pelicular.
(4. 8)
A modelagem universal do motor de indução trifásico foi selecionada para executar as
simulações desta dissertação, pelas seguintes razões:

70
Apresenta a vantagem de combinar em um único circuito equivalente trifásico os
modelos de modo comum, modo diferencial, eixo e rolamento;
Considera a funcionalidade de uma capacitância para os sinais de alta frequência, nas
primeiras espiras das bobinas de cada fase e de outra capacitância representando o
restante das espiras para os sinais de baixa frequência;
Fornece a descrição detalhada para a aquisição dos seus parâmetros.
A Fig. 4.13 mostra a modelagem universal do motor de indução trifásico, que
responde em frequência na faixa de 10 Hz até 10 MHz (MIRAFZAL, 2006, p. 423-433).
Fig. 4. 13: Modelagem universal do motor de indução trifásico, figura extraída a partir de (MIRAFZAL, 2006).

71
4.10 Conclusões
A modelagem da seção 4.2, concebeu os elementos básicos para a compreensão da
distribuição da tensão Vcm e das correntes não-circulantes que fluem pelo motor de indução,
estabelecendo os caminhos dos respectivos acoplamentos eletrostáticos, porém deu um
tratamento superficial à modelagem do rolamento e não estabeleceu as formas de obtenção
dos seus parâmetros.
O modelo para a análise do desempenho do rolamento contribuiu significativamente
para as concepções de mitigações dos efeitos das tensões de eixo e correntes de rolamentos,
através da análise das sobretensões produzidas pelas bem conhecidas ondas viajantes.
Também, estabeleceu a forma de medição para o estabelecimento de todos os parâmetros,
possibilitando a verificação da relação BVR e das correntes não-circulantes e circulantes de
descarga e condução.
Na modelagem para a análise modal foi verificada a primeira tentativa de modelar os
enrolamentos trifásicos do estator e rotor, associando o modelo do eixo e rolamentos.
Entretanto, não foram descritas as formas de obtenção de seus respectivos parâmetros,
dificultando a sua aplicação.
A modelagem que abrange até a faixa de rádio frequência idealizou o enrolamento
trifásico do estator formado por elementos com parâmetros distribuídos, utilizando várias
seções π, ligadas em série. Tal modelagem contribuiu com a introdução do conceito de
indutância, capacitância e resistência entre as espiras do enrolamento trifásico e o
amortecimento das sobretensões nas primeiras espiras das bobinas de fase. No entanto, não
são detalhados os meios para o estabelecimento da maior parte de seus parâmetros.
A modelagem da seção 4.6 utiliza parâmetros distribuídos para representar os
enrolamentos trifásicos do estator e rotor, bem como dos seus respectivos núcleos, além dos
circuitos de eixo e rolamentos. Nesta modelagem, surgem as impedâncias dos semi-eixos e
dos rolamentos distintos, mesmo que com valores iguais ou simétricos. Entretanto, para as
análises das tensões e correntes de alta frequência nos rolamentos, a modelagem deixa a
desejar, pois o circuito do rolamento se mostra desprovido de qualquer capacitância,
apresentando apenas elementos resistivos e indutivos.
Na modelagem com resposta em frequência de 50 kHz até 3 MHz é considerada a
distribuição não-linear da tensão sobre as bobinas do enrolamento trifásico, verificando-se
que ocorre uma razoável queda de tensão na primeira bobina de cada fase. A maior parte dos

72
parâmetros é obtida através de medições no rotor e estator da máquina, com o rotor extraído.
No entanto, não é estabelecido o modo de obter a capacitância entre as espiras das bobinas de
uma mesma fase do enrolamento trifásico.
A modelagem com resposta em frequência na faixa de kHz até MHz utiliza apenas
uma seção π para modelar o enrolamento trifásico do motor, onde a maior parte dos seus
parâmetros é determinada analiticamente, através das formas de onda da tensão e corrente de
modo comum durante o tempo de subida de tais parâmetros. Nesta modelagem, também é
estabelecida a capacitância das primeiras espiras das bobinas de cada fase para responder em
altas frequências, assim como a capacitância concentrada ligada no ponto neutro do
enrolamento trifásico para responder em baixas frequências. Entretanto, não são mencionados
os circuitos do eixo e rolamentos.
A modelagem universal do motor de indução trifásico apresenta a vantagem de
combinar em um único circuito equivalente trifásico os modelos de modo comum, modo
diferencial, eixo e rolamento, respondendo satisfatoriamente em uma faixa ampla de
frequências entre 10 Hz e 10 MHz. Também, é considerada nesta modelagem, a
funcionalidade de uma capacitância para responder aos sinais de alta frequência nas primeiras
espiras das bobinas de fase e outra capacitância representando o restante das espiras para
responder aos sinais de baixa frequência. Os procedimentos para a obtenção de todos os
parâmetros contidos no modelo são descritos completamente. Tal modelagem permite
observar as tensões e correntes nos enrolamentos de fase, eixo e entreferro, além das correntes
não-circulantes e circulantes de descarga e condução que fluem pelos rolamentos. Por estas
razões, a modelagem universal do motor de indução trifásico é a que se mostrou mais
adequada para a realização das simulações, sendo selecionada para desempenhar tal função.

Capítulo 5 – Simulações Computacionais e
Testes Experimentais
5.1 Considerações Iniciais
Neste capitulo, a modelagem de um sistema de acionamento real, composto por um
conversor de frequência, cabos de alimentação e motor de indução trifásico é desenvolvida na
plataforma Simulink/Matlab. A distribuição da tensão Vcm pelos acoplamentos eletrostáticos
do motor é simulada e são verificadas as correntes de alta frequência fluindo pelos mesmos,
com o objetivo de se reproduzir as grandezas relacionadas aos fenômenos abordados nos
capítulos 2 e 3. Além disso, são apresentadas as modificações especiais executadas em um
motor de indução com a finalidade de possibilitar a realização de medições de tais grandezas.
Finalmente, os resultados das simulações e das medições são comparados e discutidos.
5.2 Modelagem do Sistema de Acionamento
O sistema de acionamento que foi modelado é constituído pelo conversor PWM, cabos
de alimentação e motor de indução, tal como ilustra a Fig. 5.1.
Fig. 5. 1: Sistema trifásico de acionamento típico, figura extraída modificada a partir de (PAULA, 2005).
A visão geral do modelo computacional implementado é mostrada na Fig. 5.2, onde
uma ponte inversora PWM aplica tensões de modo diferencial e comum ao motor de indução

74
através dos cabos de alimentação. Toda a corrente de modo comum retorna ao barramento c.c.
através do plano metálico sobre o qual os cabos estão dispostos, representando a malha de
aterramento do sistema.
Fig. 5. 2: Vista geral do sistema de acionamento implementado no Simulink/Matlab.
5.2.1 Modelagem do Conversor PWM
O conversor de frequência é representado simplesmente por uma ponte inversora
PWM comutada pelos IGBTs, (ponte universal presente na biblioteca no Simulink), associada
ao barramento c.c., contemplando os principais acoplamentos capacitivos do conversor para a
terra (PAULA, 2011). Os valores destas capacitâncias foram medidos para dois equipamentos
distintos (um conversor CFW de três níveis, disponível no Laboratório de Aplicações
Industriais UFMG “LAI”, e um módulo inversor trifásico BSM30GP60 de dois níveis), sendo
mostrados na Tabela II. Uma vez que a potência destes dispositivos é compatível com aquela
do conversor PWM utilizado nos testes desta dissertação, tais valores são aplicados à presente
simulação. No tocante ao valor de Cf, tem-se que o mesmo depende, além da potência do
conversor, também da sua montagem física. Na falta de outro valor, utilizou-se aquele da
Tabela II, relativo a uma ponte inversora de três níveis.
Tabela II - Valores medidos das capacitâncias C e Cf do conversor de frequência PWM, Tabela extraída a partir
de (PAULA, 2011).
Capacitância Modelo do conversor
CFW-09 (três níveis) BSM30GP60 (dois níveis)
C 7.2 ηF 36.0 ρF
Cf 20.5 ηF -
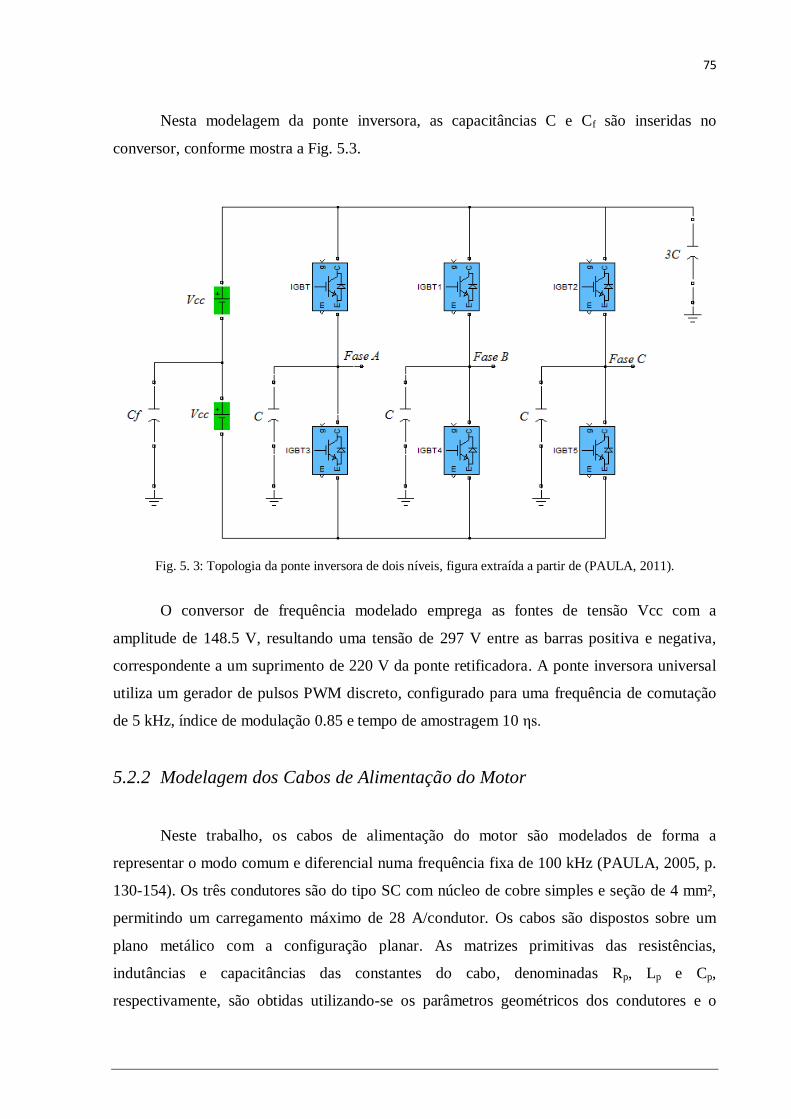
75
Nesta modelagem da ponte inversora, as capacitâncias C e Cf são inseridas no
conversor, conforme mostra a Fig. 5.3.
Fig. 5. 3: Topologia da ponte inversora de dois níveis, figura extraída a partir de (PAULA, 2011).
O conversor de frequência modelado emprega as fontes de tensão Vcc com a
amplitude de 148.5 V, resultando uma tensão de 297 V entre as barras positiva e negativa,
correspondente a um suprimento de 220 V da ponte retificadora. A ponte inversora universal
utiliza um gerador de pulsos PWM discreto, configurado para uma frequência de comutação
de 5 kHz, índice de modulação 0.85 e tempo de amostragem 10 ηs.
5.2.2 Modelagem dos Cabos de Alimentação do Motor
Neste trabalho, os cabos de alimentação do motor são modelados de forma a
representar o modo comum e diferencial numa frequência fixa de 100 kHz (PAULA, 2005, p.
130-154). Os três condutores são do tipo SC com núcleo de cobre simples e seção de 4 mm²,
permitindo um carregamento máximo de 28 A/condutor. Os cabos são dispostos sobre um
plano metálico com a configuração planar. As matrizes primitivas das resistências,
indutâncias e capacitâncias das constantes do cabo, denominadas Rp, Lp e Cp,
respectivamente, são obtidas utilizando-se os parâmetros geométricos dos condutores e o

76
programa computacional ATP, através da rotina Cable Constants. As matrizes resultantes são
mostradas de (5.1) a (5.3) dadas em Ω/m, H/m e F/m, respectivamente.
(5. 1)
(5. 2)
(5. 3)
As resistências e indutâncias próprias e mútuas são denominadas Rpr, Rm, Lpr e Lm,
respectivamente; Cs é a capacitância do condutor para o plano de referência e Cm é a
capacitância mútua entre os condutores. Os parâmetros de sequência zero e positiva podem
ser obtidos através dos valores médios próprios e mútuos de cada matriz primitiva, calculados
como se segue:
Rzero = Rpr + 2*Rm = 0.9087 Ω/m;
Rpos = Rpr - Rm = 0.0207 Ω/m;
Lzero = Lpr+2*Lm = 0.4241x10-5
H/m;
Lpos = Lpr – Lm = 0.0659x10-5
H/m
Czero = Cs;
Cs+2*Cm = 0.6855x10-10
F/m;
Cm = -0.0100x10-10
F/m;
Czero = 0.6655x10-10
F/m;
Cpos = Cs + 3*Cm = 0.6955x10-10
F/m
A modelagem utilizada para a representação dos cabos é aquela proposta em (PAULA,
2005, p. 130-154), cuja metodologia encontra-se detalhada na referência em questão. Tal
técnica propõe a associação de circuitos π especialmente modificados, numa quantidade

77
apropriada para a reprodução da natureza distribuída dos parâmetros do cabo, como ilustra a
Fig. 5.4. Além disso, tal modelagem representa com exatidão o efeito pelicular tanto nas fases
como no caminho de retorno pela terra, embora neste trabalho tenha sido utilizada uma versão
simplificada do mesmo, com parâmetros fixos correspondentes à frequência de 100 kHz. Por
fim, tem-se que este modelo reproduz também simultaneamente os modos comum e
diferencial sem a necessidade de realizar a transformação modal (PAULA, 2005, p. 130-154).
Fig. 5. 4: Arranjo especial de uma célula π para a modelagem do cabo, figura extraída de (PAULA, 2005).
Os valores utilizados na composição da célula π, relativos aos condutores de
alimentação de 4 mm², estão resumidos na Tabela III.
Tabela III - Valores dos parâmetros do circuito π relativos aos condutores de alimentação do motor de indução.
Parâmetros
Rpos (Ω/m) Lpos (H/m) Cpos/2 (F/m) C’/2 (F/m) Rm (Ω/m) Lm (H/m)
0.0208 0.0659x10-5
0.3478x10-10
7.7143x10-10
0.2960 0.1194x10-5
Os condutores de alimentação do motor têm 20 metros de comprimento, tendo sido
modelados por 20 células π conectadas em cascata para representar, satisfatoriamente, o
fenômeno da propagação e reflexão de ondas.

78
5.2.3 Modelagem do Motor de Indução
A modelagem universal do motor de indução, explanada na seção 4.9, é aplicada a um
motor de indução da marca Weg, modelo Plus CE, de alto rendimento, de 3 cv, 220 V, 1735
rpm. Inicialmente, são realizados os ensaios a vazio e com rotor bloqueado no mesmo,
obtendo-se os resultados apresentados na Tabela IV.
Tabela IV - Resultados dos ensaios a vazio e com rotor bloqueado.
Ensaio a vazio do motor de 3 cv
Vo (V) Io (A) W1o (W) W2o (W) Po (W) Rs (Ω)
220.0 4.21 - 426.0 604 178.0 2.41
Ensaio com o rotor bloqueado do motor de 3 cv
Vbl (V) *Ibl (A) W1bl (W) W2bl (W) Pbl (W) Rs (Ω)
44.7 8.30 314.0 - 7.0 307.0 2.41
Os parâmetros do circuito T-equivalente da norma IEEE Std 112 são obtidos, por
completo, para o motor de teste, utilizando-se os resultados de tais ensaios. Os valores dos
parâmetros de interesse são os seguintes: resistência de cada fase do enrolamento do estator
(Rs = 2.41 Ω); indutância de magnetização (Lm = 242.57 mH); resistência do rotor referida ao
estator (Rr = 2.04 Ω); indutâncias de dispersão do enrolamento do estator e do rotor referidas
ao estator, respectivamente, (Lls = 11.77 mH e Llr = 9.95 mH). Os parâmetros complementares
da modelagem universal são determinados da seguinte forma:
1. A indutância de dispersão das quatro primeiras espiras (ηLls = 1.17 μH) é calculada de
acordo com a equação (4.2), onde o número total de espiras por fase é 402 (dado
fornecido pelo fabricante);
2. A resistência de amortecimento inicial do estator para a terra (μRs = 230.98 mΩ) é
obtida a partir da equação (4.8); posteriormente, é aplicado o fator multiplicativo igual
a 10 para compensar os efeitos de proximidade e pelicular (MIRAFZAL, 2006, p. 423-
433);
3. A capacitância total do enrolamento do estator para a carcaça (Cwf-total = 3.16 ηF) é
calculada de acordo com as equações (4.3) e (4.5), onde:
a) O valor obtido do perímetro da ranhura (Lslot = 33.21 mm) é estabelecido
empregando-se a expressão (4.4), conhecendo-se as dimensões da ranhura do
núcleo do estator, cujos desenhos foram fornecidos pelo fabricante do motor e
são mostrados nas Fig. 5.5 (a) e (b);

79
Fig. 5. 5: Ranhura do núcleo do estator do motor WEG de 3 cv, alto rendimento, figuras fornecidas pelo
fabricante de motores WEG.
b) Outras informações pertinentes ao motor de teste que são fornecidas pelo seu
fabricante: Ns = 36.0 ranhuras, lfe = 120.0 mm, δ1 = 0.23 mm, εr1 = 3.2, δ2 =
0.04 mm e εr2 = 3.2;
c) O papel isolante dobrado na borda da ranhura (Kt =1.25) e a espessura do
espaço de ar aleatório entre o papel isolante e a parede da ranhura (δ3 = 0.29),
cujos valores típicos se encontram, respectivamente, nos intervalos (1.0 < kt <
1.5) e (0.02 < δ3 < 0.3 mm) (MIRAFZAL, 2006, p. 423-433), são estabelecidos
depois de serem testados em cálculos preliminares das capacitâncias de Cwf-slot
e Cwf-total, considerando-se os referidos intervalos, pois o fabricante não
disponibiliza tais parâmetros. Os valores extremos e intermediários dos
respectivos intervalos são aplicados nos cálculos, cujos resultados são
apresentados na Tabela V. Além disso, tomou-se como referência as
informações sobre a medição da capacitância de Cwf = 3.10 ηF que foi
realizada anteriormente no motor de teste com o medidor LRC, bem como do
valor aproximado de Cwf ≈ 3.10 ηF que foi obtido em (CHAVES, 2011 (Abril))
e (CHAVES, 2011 - Junho), para este mesmo tipo de motor, utilizando-se o
método de elementos finitos. Assim sendo, considerou-se o valor de Cwf = 3.10
ηF como a referência para o valor obtido através das equações (4.3) e (4.5).

80
Observando a Tabela V, verifica-se que o resultado calculado que mais se
aproxima do valor de referência, é o que considera δ3 = 0.299 mm, juntamente
com o valor intermediário de Kt (1.25). Quando são utilizados os valores
respectivos de δ3 iguais a 0.021 e 0.140 para o mesmo o valor intermediário de
Kt (1.25), os erros percentuais alcançam 225.4 e 65.6%, respectivamente. Isto
mostra que o espaço de ar aleatório entre o papel isolante e a parede da ranhura
(δ3) tem mais influência na determinação da capacitância Cwf-total do que o
papel isolante dobrado na borda da ranhura (Kt), pelo menos para o motor em
questão;
Tabela V - Capacitâncias Cwf-slot e Cwf-total calculadas para os valores extremos e intermediários de Kt e
δ3.
Parâmetros
Kt δ3 (mm) Cwf-slot (ρF) Cwf-total (ηF)
1.01 0.021 332.38 11.966
1.01 0.140 156.66 5.6398
1.01 0.299 91.810 3.3052
1.25 0.021 285.90 10.292
1.25 0.14 145.51 5.2384
1.25 0.299 87.864 3.1631
1.49 0.021 250.82 9.0295
1.49 0.140 135.84 4.8903
1.49 0.299 84.243 3.0328
4. A capacitância efetiva do enrolamento do estator para a carcaça (Cwf-effective = 175.73
ρF) é determinada em função da capacitância (Cwf-slot = 87.64 ρF) e do tipo conexão do
enrolamento trifásico (MIRAFZAL, 2006, p. 423-433). A capacitância Cwf-slot é
calculada utilizando-se a equação (4.3) e, como o enrolamento trifásico foi conectado
em triângulo, resulta em Cwf-effective = 2*Cwf-slot;
5. A capacitância concentrada no ponto neutro do enrolamento trifásico (Cwf-0 = 878.64
ρF) é determinada através da equação (4.6);
6. A capacitância entre as espiras das bobinas de uma mesma fase (Cws = 702.91 ρF) é
calculada em função de Cwf-effective, de acordo com a equação (4.7), considerando-se
que a segunda frequência de ressonância é o dobro da primeira (MIRAFZAL, 2006, p.
423-433), ou Cws = (2)2*Cwf-effective;
7. As resistências dos núcleos do estator e rotor (Rcore = 2.93 kΩ) são obtidas por meio da
equação (4.1);
8. A capacitância concentrada do núcleo do rotor para o núcleo do estator (Cg = 755.48
ρF) é estabelecida por meio da equação (2.14), considerando-se as dimensões do disco

81
do rotor (Fig. 5.6), das ranhuras do estator (Fig. 5.5) e a distância do entreferro (g),
sendo todos esses dados fornecidos pelo fabricante do motor. O valor do coeficiente de
Carter (Kc = 1.36) é calculado pelo método primitivo através da equação (2.13),
utilizando-se as seguintes informações: a largura efetiva de abertura da ranhura WS =
2.2 mm [Fig. 5.5 (a)]; a largura do dente da ranhura Wt = 6.083 mm, correspondendo à
largura do dente sem o chanfro (a = 3.8 mm) [Fig. 5.6 (b)], somado à diferença entre a
largura no início da ranhura após o chanfro (b = 4.483 mm) e WS (c = 2.2 mm) [Fig.
5.6 (a)], ou seja, [3.8 mm + (4.483 mm - 2.2 mm)];
9. O valor da resistência entre as espiras das bobinas de uma mesma fase (Rws = 1.15 kΩ)
do motor de teste, não é medida na primeira frequência de ressonância de acordo com
(MIRAFZAL, 2006, p. 423-433), devido à indisponibilidade dos instrumentos e
equipamentos necessários para a sua realização. Entretanto, é utilizado o resultado de
tal medição em outro motor de indução de 3 hp (MOREIRA, 2002, p. 1297-1306). Os
detalhes da determinação de (Rws) se encontram na referência citada, tendo sido
utilizado tal valor de Rws na presente modelagem;
(a)
(b)
(c)
Fig. 5. 6: (a) e (b) detalhe das dimensões das ranhuras do estator; (c) desenho do disco do rotor do
motor de teste, desenhos fornecidos pelo fabricante de motores WEG.

82
10. A capacitância do enrolamento do estator para o núcleo do rotor (Cwr = 58.97 ρF) é
calculada por meio das equações (2.2), (2.3) e (2.4), considerando-se a geometria da
ranhura do estator (Fig. 5.5). Os seguintes dados também são fornecidos pelo
fabricante do motor: Nr = 28.0, εr1 = 3.2, lfe = 120.0 mm, g = 0.3 mm e hwedge+ins = 0.35
mm. As dimensões b0 = 2,2 mm e ho = 0.700 mm são obtidas de acordo com o
desenho da ranhura do estator (Fig. 5.5);
11. Os cálculos das capacitâncias dos rolamentos (Cb = 2011.8 ρF para o rolamento tipo
6205 ZZ e Cb1 = 1788.3 ρF para o tipo 6204 ZZ (Cb) são realizados utilizando-se a
equação (2.7), considerando-se o número de esferas Nb = 9 para o rolamento tipo 6205
ZZ e Nb = 8 para o tipo 6204 ZZ; a permissividade relativa do lubrificante (εrlub = 2.5)
para a graxa dos rolamentos dos motores elétricos, de modo geral, é baseada em
(MAGDUN e BINDER, 2009, p. 1051-1056), observando-se que a graxa POLYREX
EM ESSO é especificada para os rolamentos utilizados no motor de teste, na qual é
empregado um espessante à base de poliuréia; o raio das esferas (Re = 4 mm) para
ambos os rolamentos foi obtida pela medição direta do diâmetro das esferas, por meio
do ensaio destrutivo dos rolamentos especificados; a folga radial do rolamento (Fr = 20
µm) e outras dimensões complementares são obtidas no catálogo de rolamentos fixos
de esferas (NACHI, 2007, p. 138-164) e no catálogo on-line do fabricante de
rolamentos SKF (www.skf.com), que são resumidas na Tabela VI.
Tabela VI - Dimensões dos rolamentos tipos 6204 ZZ e 6205 ZZ.
Dimensões básicas dos rolamentos
Dimensões Tipo 6204 ZZ Tipo 6205 ZZ
D (mm) 47 52
d (mm) 20 25
B (mm) 14 15
r (mm) 1 1
Da (mm) 41 46
da (mm) 26 31
Fr - Folga radial mínima (µm) 5 5
Fr - Folga radial máxima (µm) 20 20
As dimensões do rolamento são ilustradas através das cotas nos desenhos apresentados
na Fig. 5.7;
12. A resistência do rolamento (Rb = 10 Ω) é considerada constante (BINDER e
MUETZE, 2008, p. 769-776), assumindo um valor para os contatos quase-metálicos
do rolamento operando em baixa rotação;

83
13. As impedâncias dos semi-eixos do rotor Zeixo e Zeixo1 são incluídas no modelo
conforme sugerido por (XIANG, 1998, p. 1003-1009), (SHAMI e AKAGI, 2009, p.
1532-1540) e (ONTTO e LUOMI, 2005, p. 1653-1660). Entretanto, tais referências
não descrevem os meios de obtenção dos seus respectivos valores, de forma que se
optou por adotar neste trabalho, de forma arbitrária, o valor de 10.0 mΩ para as
mesmas, apenas para verificar as tensões de condução entre as pontas do eixo e as
respectivas correntes circulantes de condução, através dos rolamentos.
Fig. 5. 7: Apresentação das dimensões básicas do rolamento e folga radial.
A Tabela VII apresenta os parâmetros de placa e as dimensões geométricas do motor
modelado, ao passo que a Tabela VIII reúne os parâmetros calculados nos itens 1 a 13
mostrados anteriormente.
Tabela VII - Dimensões e parâmetros do motor de indução de 3 cv.
PARÂMETROS E DIMENSÕES DADOS
Linha - data de fabricação - número de série Plus CE – 10/08/2008 – HE 17919
Fator de serviço 1.15
Classe de isolamento F
Categoria N
Índice de proteção IP55
Regime de trabalho S1
Temperatura ambiente máxima 40.0 oC
Altitude 1000.0 m
Rolamento da ponta acionada do eixo 6205 ZZ
Rolamento da parte traseira 6204 ZZ
Conexão do enrolamento do estator Triângulo
Tipo de rotor Gaiola de esquilo
Comprimento do núcleo do estator/rotor 120.0 mm
Número de ranhuras do estator 36.0
Número de ranhuras do rotor 28.0
Número de condutores por ranhura 67.0
Número de ranhuras por fase 12.0
Número de espiras do enrolamento trifásico 1206.0
Número de espiras por fase 402.0
Largura média da ranhura do estator 5.47 mm
Profundidade da ranhura do estator 12.5 mm
Distância média do entreferro 0.3 mm

84
Tabela VIII - Parâmetros da modelagem universal do motor de indução de 3 cv.
PARÂMETROS DA MODELAGEM UNIVERSAL
Grandeza Valor Grandeza Valor Grandeza Valor
Rcore 2.93 kΩ 10xμRs 230.98 mΩ Cwr1 598.12 ρF
Zm 90.51 Ω Cwf-slot 87.64 ρF Cwr 58.97 ρF
Lm 242.57 mH Cwf-total 3.1631 ηF Kc 1.3617
Rs 2.410 Ω Cwf-effective (Δ) 175.728 ρF Cg 755.48 ρF
Lls 11.77 mH Cwf-0 (Δ) 878.64 ρF Cb 2011.8 ρF
Rr 2.040 Ω Cws (Δ) 702.91 ρF Cb1 1788.3 ρF
Llr 9.95 mH Rws 1150.0 Ω Rb = Rb1 10.0 Ω
ηLls 1.170 μH Cwr0 65.42 ρF Zeixo = Zeixo1 10.0 mΩ
A Fig. 5.8 mostra os componentes definidos na modelagem universal do motor de
indução trifásico incluindo o subsistema eixo/rolamentos ligado em paralelo com a
capacitância Cwf-0.
Fig. 5. 8: Associação da modelagem universal ao subsistema eixo/rolamentos, figura modificada a partir de
(MIRAFZAL, 2006).
O subsistema eixo/rolamentos é mostrado com mais detalhes na Fig. 5.9.

85
Fig. 5. 9: Subsistema Eixo/rolamentos.
As chaves programadas Cp e Cp1 comutam os seus contatos em paralelo com as
respectivas capacitâncias Cb e Cb1 para que sejam verificadas as correntes não-circulantes e
circulantes de descarga, portanto, nas simulações onde são observadas as correntes não-
circulantes e circulantes de condução, as chaves programadas se mantêm desconectadas.
5.3 Resultados das Simulações Computacionais
As simulações são realizadas utilizando-se o modelo universal do motor de indução,
considerando o escorregamento unitário do motor de indução, embora os fenômenos de alta
frequência independam do escorregamento ou da carga aplicada ao motor. Inicialmente, é
verificada a relação de tensão dos rolamentos BVR; em seguida, analisam-se as correntes não-
circulantes e circulantes de condução e, por fim, as correntes não-circulantes e circulantes de
descarga.
5.3.1 Relação BVR do Motor Modelado e Corrente de Modo Comum no Ponto
de Aterramento de sua Carcaça
A relação de tensão dos rolamentos BVR é obtida a partir da equação (3.8) utilizando-
se os valores entre os patamares das tensões Vb (1.189 V) e Vcm (92.65 V) obtidas nas

86
simulações, resultando numa BVR de 1.28%. A Fig. 5.10 (a) mostra as formas de onda
idênticas da tensão sobre os respectivos rolamentos dos lados DE e NDE do eixo e, a Fig.
5.10 (b) detalha uma seção da Fig. 5.10 (a).
(a)
(b)
Fig. 5. 10: (a) Forma de onda das tensões idênticas sobre os rolamentos do lado DE e NDE, respectivamente,
com resultado da simulação; (b) detalhe de um setor da figura (a) numa base de tempo menor.
0 1 2
x 10-4
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
X: 6.013e-005Y: 1.781
Tempo(s)
Tensão (
V)
X: 9.793e-005Y: 0.5911
Tensão Vzb = Vzb1
4 5 6 7 8 9 10 11 12
x 10-5
-0.5
0
0.5
1
1.5
X: 6.013e-005Y: 1.781
Tempo(s)
Tensão (
V) X: 9.793e-005
Y: 0.5911
Tensão Vzb = Vzb1

87
A Fig. 5.11 (a) mostra a forma de onda da tensão Vcm aplicada nos terminais do
motor de indução como resultante das simulações e a Fig. 5.11 (b) detalha um setor da Fig.
5.11 (a) numa base de tempo menor.
(a)
(b)
Fig. 5. 11: (a) Resultado da simulação da tensão Vcm nos terminais do motor de indução; (b) detalhe de um setor
da figura (a) numa escala de tempo menor.
A Fig. 5.12 (a) ilustra a forma de onda da corrente de modo comum total do motor, ou
seja, aquela medida no seu ponto de aterramento e que considera as parcelas de correntes
0 1 2
x 10-4
-200
-150
-100
-50
0
50
100
150
200
Tempo(s)
Tensão (
V)
X: 5.876e-005Y: 139
X: 9.516e-005Y: 46.35
Tensão Vcm
6 7 8 9 10 11 12
x 10-5
-100
-50
0
50
100
150
X: 6.265e-005Y: 114.1
Tensão (
V)
Tempo(s)
X: 9.566e-005Y: 35.18
Tensão Vcm
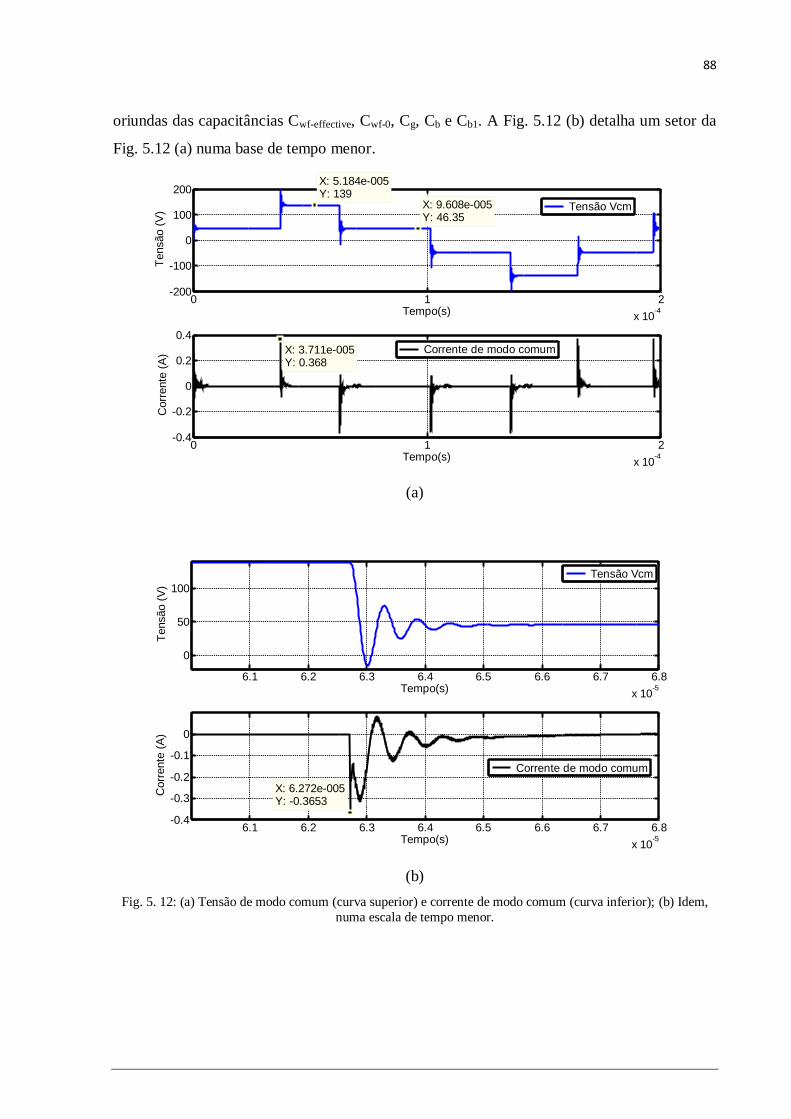
88
oriundas das capacitâncias Cwf-effective, Cwf-0, Cg, Cb e Cb1. A Fig. 5.12 (b) detalha um setor da
Fig. 5.12 (a) numa base de tempo menor.
(a)
(b)
Fig. 5. 12: (a) Tensão de modo comum (curva superior) e corrente de modo comum (curva inferior); (b) Idem,
numa escala de tempo menor.
0 1 2
x 10-4
-200
-100
0
100
200
Tempo(s)
Tensão (
V)
X: 5.184e-005Y: 139
X: 9.608e-005Y: 46.35
Tensão Vcm
0 1 2
x 10-4
-0.4
-0.2
0
0.2
0.4
Tempo(s)
Corr
ente
(A
) X: 3.711e-005Y: 0.368
Corrente de modo comum
6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8
x 10-5
0
50
100
Tempo(s)
Tensão (
V)
Tensão Vcm
6.1 6.2 6.3 6.4 6.5 6.6 6.7 6.8
x 10-5
-0.4
-0.3
-0.2
-0.1
0
Tempo(s)
Corr
ente
(A
)
X: 6.272e-005Y: -0.3653
Corrente de modo comum

89
5.3.2 Correntes Não-Circulantes e Circulantes de Condução
Os resultados das simulações mostram que as correntes de condução ocorrem
assimetricamente nos rolamentos, devido à diferença entre os valores das capacitâncias
existente nos rolamentos (Cb = 2011.8 ρF e Cb1 = 1788.3 ρF). As figuras seguintes mostram as
formas de onda da corrente sobre os parâmetros Zb, Zb1, Cg e Cwr:
1) Corrente na impedância do rolamento DE com picos de 3.23 mA, como ilustra a Fig. 5.13;
(a)
(b)
Fig. 5. 13: (a) Resultado de simulação da corrente de condução no rolamento do lado NDE do eixo; (b) detalhe
da figura (a) numa base de tempo menor.
0 1 2
x 10-4
-4
-3
-2
-1
0
1
2
3
4x 10
-3
X: 3.739e-005Y: 0.003233
Tempo(s)
Corr
ente
(A
)
Corrente Izb
3 4 5 6 7 8
x 10-5
-3
-2
-1
0
1
2
3
x 10-3
X: 3.739e-005Y: 0.003233
Tempo(s)
Corr
ente
(A
)
Corrente Izb

90
2) Corrente na impedância do rolamento NDE com picos de 2.88 mA, como ilustra a Fig. 5.14
(a) e (b);
(a)
(b)
Fig. 5. 14: (a) Resultado de simulação da corrente de condução no rolamento do lado DE do eixo; (b) detalhe de
um setor da figura (a) numa base de tempo menor.
0 1 2
x 10-4
-3
-2
-1
0
1
2
3x 10
-3
X: 3.739e-005Y: 0.002881
Tempo(s)
Corr
ente
(A
)
Corrente Izb1
3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-3
-2
-1
0
1
2
x 10-3
X: 3.739e-005Y: 0.002881
Tempo(s)
Corr
ente
(A
)
Corrente Izb1

91
3) Corrente na capacitância Cg com picos de 1.22 mA, como ilustra a Fig. 5.15 (a) e (b);
(a)
(b)
Fig. 5. 15: (a) Resultado de simulação da corrente de condução na capacitância Cg; (b) detalhe da figura (a) numa
escala de tempo menor.
0 1 2
x 10-4
-1.5
-1
-0.5
0
0.5
1
1.5x 10
-3
X: 3.737e-005Y: 0.001229
Tempo(s)
Corr
ente
(A
)
Corrente Icg
3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-1
-0.5
0
0.5
1
x 10-3
X: 3.737e-005Y: 0.001229
Tempo(s)
Corr
ente
(A
)
Corrente Icg

92
4) Corrente na capacitância Cwr com picos de 7.32 mA, como ilustra a Fig. 5.16 (a) e (b).
(a)
(b)
Fig. 5. 16: (a) Resultado de simulação da corrente de condução na capacitância Cwr; (b) detalhe de um setor da
figura (a).
A simples inspeção das formas de onda das correntes assimétricas nos rolamentos não
explicita a corrente circulante de condução. Entretanto, verifica-se a existência da diferença
de potencial entre as pontas do eixo com a amplitude de 3.55 µV, ilustrada na Fig. 5.17,
donde se conclui a existência de uma corrente circulante. Como a forma de onda de tal tensão
0 1 2
x 10-4
-8
-6
-4
-2
0
2
4
6
8x 10
-3
X: 3.739e-005Y: 0.007328
Tempo(s)
Corr
ente
(A
)
Corrente Icwr
3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-6
-4
-2
0
2
4
6
x 10-3
X: 3.739e-005Y: 0.007328
Tempo(s)
Corr
ente
(A
)
Corrente Icwr

93
exibe o mesmo padrão de variação da tensão Vcm, esta tensão é classificada como uma tensão
de condução do eixo, porque produz uma corrente circulante de condução.
(a)
(b)
Fig. 5. 17: (a) Resultado de simulação da tensão entre as pontas do eixo do rotor; (b) detalhe da figura (a) numa
escala de tempo menor.
Neste caso especifico, o pico da corrente circulante de condução é igual a 0.023 mA,
obtida através da diferença instantânea entre o pico da corrente não-circulante de condução
que chega até o eixo (Icwr = 7.320 mA) e a soma dos picos das correntes circulantes e não-
0 1 2
x 10-4
-4
-3
-2
-1
0
1
2
3
4x 10
-6
X: 3.741e-005Y: 3.558e-006
Tempo(s)
Tensão (
V)
Tensão entre as pontas do eixo (NDE) e (DE)
3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-3
-2
-1
0
1
2
3
x 10-6
Tempo(s)
Tensão (
V)
X: 3.741e-005Y: 3.558e-006
Tensão entre as pontas do eixo (NDE) e (DE)

94
circulantes de condução que fluem por Cg, Cb e Cb1 (7.343 mA), simultaneamente. Tal
corrente circulante pode ocorrer em uma, duas ou três malhas nos sentidos horário e/ou anti-
horário (Fig. 2.21).
Num caso especial, onde as impedâncias dos rolamentos e dos semi-eixos do rotor
sejam perfeitamente simétricas, os picos das correntes não-circulantes de condução que fluem
pelos rolamentos são idênticos e a diferença de potencial entre as pontas do eixo é igual a
zero, bem como as correntes circulantes de condução.
5.3.3 Correntes Não-Circulantes e Circulantes de Descarga
As correntes de descarga são simuladas a partir da inserção das chaves programadas
Cp e Cp1, que aparecem desconectadas na Fig. 5.9. Estas chaves são ligadas em paralelo com
as capacitâncias Cb e Cb1, respectivamente, em substituição à carga não-linear Znl, que é
admitida na modelagem dos rolamentos para simular a ruptura dielétrica da película
lubrificante. O intervalo de fechamento e abertura das chaves programadas é considerado
igual a um décimo do tempo de transição da tensão Vcm (em torno de 10 ηs, neste caso).
Além disso, considera-se que a corrente de descarga deve ocorrer no patamar mais elevado da
tensão Vcm, sendo estabelecida, portanto, no intervalo de tempo entre 37.5 e 62.8 μs ou entre
136.7 e 164.8 µs. Duas formas de atuação das respectivas chaves programadas são levadas em
conta:
1. Ambas operando simultaneamente ou em tempos simétricos;
2. As duas atuando em momentos distintos ou em tempos assimétricos.
Uma pequena resistência interna de contato das chaves programadas, denominada Ron,
é também considerada. Tal resistência é configurada apenas para evitar os erros numéricos e
diminuir o tempo gasto nas simulações executadas. Entretanto, deve-se notar que Ron se soma
às respectivas resistências Rb e Rb1, no instante em que as chaves programadas atuam,
limitando a corrente de curto-circuito nas respectivas impedâncias dos rolamentos. Nesta
modelagem computacional, Ron é configurada com um valor de 10 mΩ.

95
5.3.3.1 Chaves Programadas Operando Simultaneamente
A operação simultânea das chaves programadas é executada simetricamente em duas
situações:
1. No instante de ocorrência da corrente de condução com a tensão Vb crescente em
direção a seu patamar mais elevado, sendo considerado o tempo de fechamento t0 igual
a 37.55 μs e de abertura t1 igual a 37.56 μs;
2. Simplesmente no valor de pico da tensão Vb no patamar mais elevado, no tempo de
fechamento t0 igual a 40.9 μs e de abertura t1 igual a 40.91 μs.
No primeiro caso, são verificados os picos de correntes de descarga simulados nos
seguintes elementos:
a) Rolamento do lado NDE do eixo com o valor da corrente não-circulante de descarga de
47.41 mA, no momento em que as chaves programadas CP e CP1 curto-circuitam
simultaneamente as respectivas capacitâncias, como ilustra a Fig. 5.18. As correntes não-
circulantes de condução com picos de 2.87 mA são verificadas, normalmente, em sincronismo
com as variações da tensão sobre os rolamentos independentemente da ocorrência da corrente
de descarga;
Fig. 5. 18: Resultado da simulação mostrando o pico da corrente de descarga no rolamento do lado NDE do eixo.
A Fig. 5.19 ilustra apenas a forma de onda do pico da corrente de descarga no rolamento do
lado NDE em uma base de tempo menor, de forma a detalhá-la um pouco mais;
4 6 8 10 12 14 16
x 10-5
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
X: 3.757e-005Y: 0.04741
Tempo(s)
Corr
ente
(A
)
X: 6.301e-005Y: -0.00287
Corrente Izb1

96
Fig. 5. 19: Detalhe da forma de onda apenas da corrente de descarga sobre o rolamento do lado NDE, numa base
de tempo menor.
2) Rolamento do lado DE do eixo com o valor de 47.36 mA, como ilustra a Fig. 5.20, sendo
também verificados os picos das correntes não-circulantes de condução com valores de 3.22
mA. Nota-se que as correntes de descarga e as de condução sofrem influências da assimetria
das capacitâncias dos rolamentos, produzindo picos de correntes assimétricos nas duas pontas
do eixo;
Fig. 5. 20: Resultado da simulação mostrando o pico da corrente de descarga no rolamento do lado DE do eixo.
3.65 3.7 3.75 3.8 3.85 3.9
x 10-5
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
X: 3.757e-005Y: 0.04741
Tempo(s)
Corr
ente
(A
) Corrente Izb1
0 1 2
x 10-4
-0.01
0
0.01
0.02
0.03
0.04
0.05
X: 3.757e-005Y: 0.04736
Tempo(s)
Corr
ente
(A
)
X: 6.299e-005Y: -0.003223
Corrente Izb

97
A Fig. 5.21 ilustra apenas a forma de onda do pico da corrente de descarga no rolamento do
lado DE em uma escala de tempo menor;
Fig. 5. 21: Detalhe da forma de onda apenas da corrente de descarga sobre o rolamento do lado DE, numa escala
de tempo menor.
3) Capacitância Cg com o valor de corrente reversa de 85.59 mA, no instante 37.57 µs, como
ilustra a Fig. 5.22, sendo mantidas no entreferro as correntes não-circulantes de condução com
picos de 1.19 mA;
Fig. 5. 22: Resultado da simulação mostrando o pico da corrente de descarga na capacitância Cg.
3.68 3.7 3.72 3.74 3.76 3.78 3.8 3.82 3.84 3.86
x 10-5
-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
0.04
0.045
X: 3.757e-005Y: 0.04736
Tempo(s)
Corr
ente
(A
)
Corrente Izb
2 4 6 8 10 12 14
x 10-5
-0.09
-0.08
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
X: 3.757e-005Y: -0.08559
Tempo(s)
Corr
ente
(A
)
X: 3.759e-005Y: 0.01399
X: 6.295e-005Y: -0.001195
Corrente Icg

98
A Fig. 5.23 ilustra a forma de onda do pico da corrente de descarga na capacitância Cg em
uma base de tempo menor;
Fig. 5. 23: Detalhe da forma de onda da corrente de descarga na capacitância Cg, numa base de tempo menor.
4) Capacitância Cwr como o valor de 9.17 mA, onde são mantidos os picos das correntes não-
circulantes de condução (7.27 mA) do enrolamento do estator para o núcleo do rotor, como
resultado de simulação ilustrada a Fig. 5.24.
Fig. 5. 24: Resultado da simulação mostrando o pico da corrente de descarga na capacitância Cwr.
3.72 3.73 3.74 3.75 3.76 3.77 3.78 3.79 3.8
x 10-5
-0.08
-0.07
-0.06
-0.05
-0.04
-0.03
-0.02
-0.01
0
0.01
X: 3.757e-005Y: -0.08559
Tempo(s)
Corr
ente
(A
)
X: 3.759e-005Y: 0.01399
Corrente Icg
0 1 2
x 10-4
-8
-6
-4
-2
0
2
4
6
8
10x 10
-3
X: 3.757e-005Y: 0.009176
Tempo(s)
Corr
ente
(A
)
X: 6.298e-005Y: -0.007276
Corrente Icwr

99
A Fig. 5.25 ilustra a forma de onda do pico da corrente de descarga na capacitância Cwr em
uma escala de tempo menor;
Fig. 5. 25: Detalhe da forma de onda da corrente de descarga na capacitância Cwr, numa escala de tempo menor.
Inspecionando-se as figuras resultantes das simulações, tem-se a impressão de ter
ocorrido apenas correntes não-circulantes de descarga, distribuídas por Cwr (9.17 mA).
Entretanto, quando se verifica a amplitude das correntes no rolamento DE (47.36 mA) e NDE
(47.41 mA) chega-se à conclusão que existem correntes circulantes de descarga provenientes
de Cg para cada rolamento, com o valor de [(Icg) /2] = 42.79 mA, o que é comprovado pela
observação do pico da corrente de descarga reversa em Cg com a amplitude de 85.59 mA.
A comprovação da existência da corrente circulante de descarga junto com as
correntes circulantes de condução é feita através do registro do pico de tensão entre as pontas
DE e NDE do eixo com a amplitude de 12.0 µV, no momento da atuação das chaves
programadas, bem como os picos contínuos de tensões com a magnitude de 3.51 µV. A Fig.
5.26 (a) e (b) mostra o pico da tensão que produz a corrente circulante de descarga no instante
37.59 µs e as respectivas tensões que produzem as correntes circulantes de condução, de
acordo com os resultados das simulações.
3.5 4 4.5 5 5.5 6 6.5 7 7.5
x 10-5
-6
-4
-2
0
2
4
6
8
x 10-3
X: 3.757e-005Y: 0.009176
Tempo(s)
Corr
ente
(A
)
X: 6.298e-005Y: -0.007276
Corrente Icwr

100
(a)
(b)
Fig. 5. 26: (a) Resultado de simulação do pico de tensão entre as pontas do eixo que produz o pico de corrente
não-circulante de descarga, juntamente com os picos de tensões que produzem correntes não-circulantes de
condução; (b) detalhe do pico da tensão de descarga da figura (a) numa base de tempo menor.
3 4 5 6 7 8 9 10 11 12
x 10-5
-2
0
2
4
6
8
10
12x 10
-6
X: 3.759e-005Y: 1.2e-005
Tempo(s)
Tensão (
V)
X: 6.304e-005Y: -3.512e-006
Tensão entre as pontas do eixo (NDE) e (DE)
3.65 3.7 3.75 3.8 3.85 3.9 3.95
x 10-5
0
2
4
6
8
10
12x 10
-6
X: 3.759e-005Y: 1.2e-005
Tempo(s)
Tensão (
V)
Tensão entre as pontas do eixo (NDE) e (DE)

101
A Fig. 5.27 (a) e (b) mostra as formas de ondas idênticas da tensão sobre os respectivos
rolamentos dos lados DE e NDE do eixo, de acordo com os resultados simulados.
(a)
(b)
Fig. 5. 27: (a) Forma de onda da tensão sobre os rolamentos das pontas DE e NDE do eixo, como resultado de
simulação; (b) detalhe do momento que ocorre a queda de tensão produzida pela corrente de descarga numa
escala de tempo menor.
No segundo caso, quando a operação simultânea (simétrica) das chaves programadas é
executada simplesmente no pico da tensão Vb em seu patamar mais elevado, considerando-se
0 1 2
x 10-4
-4
-3
-2
-1
0
1
2
Tempo(s)
Tensão (
V)
Tensão Vzb = Vzb1
3 4 5 6 7 8 9
x 10-5
-1.5
-1
-0.5
0
0.5
1
Tempo(s)
Tensão (
V)
Tensão Vzb = Vzb1

102
o tempo de fechamento t0 igual a 40.90 μs e de abertura t1 igual a 40.91 μs, são observados
picos das correntes de descarga em Zb (85,13 mA), Zb1 (85,21 mA), Cwr (11.91 mA) e Cg (-
158.4 mA). Os valores de pico das respectivas correntes nos rolamentos sofrem um acréscimo
de mais de 79.75% em relação ao primeiro caso.
5.3.3.2 Chaves Programadas Operando Assimetricamente
A ruptura dielétrica das capacitâncias nos rolamentos é simulada em tempos distintos
de atuação das chaves programadas, sendo admitidos os mesmos tempos executados nas
simulações simultâneas, isto é, t0 = 37.55 µs e t1 = 37.56 µs para o fechamento e a abertura da
chave programada CP, t2 = 40.90 µs e t3 = 40.91 µs para a chave programada CP1. A dinâmica
de ocorrência das correntes não-circulantes e circulantes assimétricas é semelhante à do caso
simétrico individual, destacando-se o aumento da intensidade das correntes circulantes de
descarga de rolamento para rolamento, devido à adição do fornecimento de carga elétrica da
capacitância que não sofre a ruptura dielétrica instantânea. A Fig. 5.28 mostra a forma de
onda da corrente de descarga no rolamento do lado DE do eixo, nos instantes em que as
chaves programadas CP e Cp1 atuam assimetricamente (37.58 e 40.93 µs).
Fig. 5. 28: Forma de onda das correntes não-circulantes e circulantes no rolamento do lado DE do eixo.
Neste caso é registrado na simulação, o pico direto de descarga de 97.74 mA e o pico
reverso de descarga de 47.21 mA, além dos picos das correntes de condução de 3.19 mA. A
4 6 8 10 12 14
x 10-5
-0.05
0
0.05
0.1
X: 3.758e-005Y: 0.09774
Tempo(s)
Corr
ente
(A
)
X: 4.093e-005Y: -0.04721
X: 6.302e-005Y: -0.003198
Corrente Izb

103
Fig. 5.29 mostra a forma de onda dos picos das correntes de descarga no rolamento do lado
DE do eixo em uma escala de tempo menor;
Fig. 5. 29: Detalhe da forma de onda das correntes de descarga no rolamento do lado DE do eixo, numa escala de
tempo menor.
A Fig. 5.30 mostra a forma de onda da corrente de descarga no rolamento do lado
NDE do eixo, nos instantes em que as chaves programadas CP e Cp1 atuam assimetricamente
(37.58 e 40.93 µs) com valores de -55.27 e 78.88 mA para as correntes de descarga,
respectivamente e de 2.48 mA para as correntes de condução.
Fig. 5. 30: Forma de onda das correntes não-circulantes e circulantes no rolamento do lado NDE do eixo.
3.7 3.75 3.8 3.85 3.9 3.95 4 4.05 4.1 4.15 4.2
x 10-5
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
X: 3.758e-005Y: 0.09774
Tempo(s)
Corr
ente
(A
)
X: 4.093e-005Y: -0.04721
Corrente Izb
3 4 5 6 7 8 9 10 11
x 10-5
-0.04
-0.02
0
0.02
0.04
0.06
0.08
X: 4.093e-005Y: 0.07888
Tempo(s)
Corr
ente
(A
)
X: 6.293e-005Y: -0.002486
X: 3.758e-005Y: -0.05527
Corrente Izb1
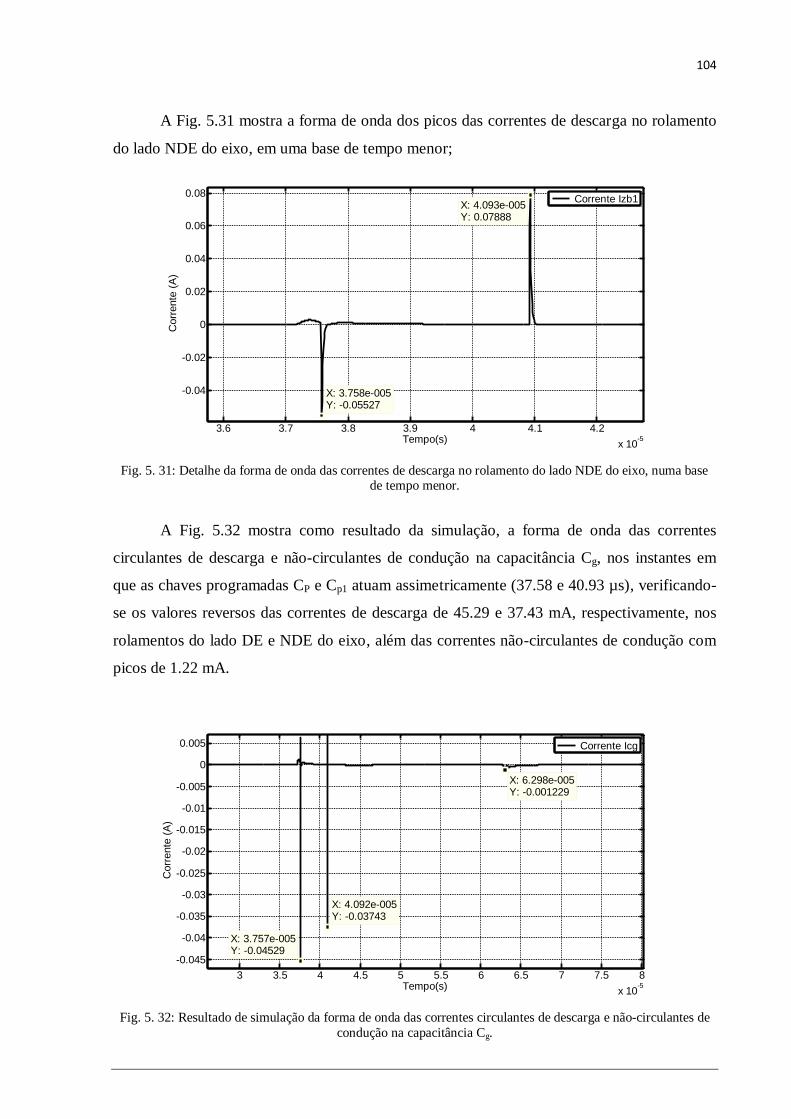
104
A Fig. 5.31 mostra a forma de onda dos picos das correntes de descarga no rolamento
do lado NDE do eixo, em uma base de tempo menor;
Fig. 5. 31: Detalhe da forma de onda das correntes de descarga no rolamento do lado NDE do eixo, numa base de tempo menor.
A Fig. 5.32 mostra como resultado da simulação, a forma de onda das correntes
circulantes de descarga e não-circulantes de condução na capacitância Cg, nos instantes em
que as chaves programadas CP e Cp1 atuam assimetricamente (37.58 e 40.93 µs), verificando-
se os valores reversos das correntes de descarga de 45.29 e 37.43 mA, respectivamente, nos
rolamentos do lado DE e NDE do eixo, além das correntes não-circulantes de condução com
picos de 1.22 mA.
Fig. 5. 32: Resultado de simulação da forma de onda das correntes circulantes de descarga e não-circulantes de
condução na capacitância Cg.
3.6 3.7 3.8 3.9 4 4.1 4.2
x 10-5
-0.04
-0.02
0
0.02
0.04
0.06
0.08
Tempo(s)
Corr
ente
(A
)
X: 4.093e-005Y: 0.07888
X: 3.758e-005Y: -0.05527
Corrente Izb1
3 3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-0.045
-0.04
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
X: 3.757e-005Y: -0.04529
Tempo(s)
Corr
ente
(A
)
X: 4.092e-005Y: -0.03743
X: 6.298e-005Y: -0.001229
Corrente Icg

105
A Fig. 5.33 mostra a forma de onda dos picos das correntes de descarga na
capacitância Cg, em uma escala de tempo menor.
Fig. 5. 33: Detalhe da forma de onda das correntes de descarga na capacitância Cg, numa escala de tempo menor.
A Fig. 5.34 ilustra o resultado da simulação da forma de onda das correntes não-
circulantes de descarga (7.32 e 3.00 mA) e de condução (7.27 mA) na capacitância Cwr.
Fig. 5. 34: Resultado de simulação da forma de onda das correntes não-circulantes de descarga e de condução na
capacitância Cg.
3.7 3.75 3.8 3.85 3.9 3.95 4 4.05 4.1 4.15
x 10-5
-0.045
-0.04
-0.035
-0.03
-0.025
-0.02
-0.015
-0.01
-0.005
0
0.005
X: 3.757e-005Y: -0.04529
Tempo(s)
Corr
ente
(A
)
X: 4.092e-005Y: -0.03743
Corrente Icg
0 1 2
x 10-4
-8
-6
-4
-2
0
2
4
6
8x 10
-3
X: 3.739e-005Y: 0.007328
Tempo(s)
Corr
ente
(A
)
X: 4.092e-005Y: 0.003009
X: 6.298e-005Y: -0.007276
Corrente Icwr

106
A Fig. 5.35 mostra a forma de onda dos picos das correntes não-circulantes de
descarga e de condução na capacitância Cg, em uma escala de tempo menor.
Fig. 5. 35: Detalhe da forma de onda das correntes não-circulantes de descarga e de condução na capacitância
Cwr, numa escala de tempo menor.
É importante ressaltar que, neste caso, ocorrem quatro correntes com características
diferentes:
1. Correntes não-circulantes de condução da capacitância Cwr para o rolamento DE (3.19
mA), rolamento NDE (2.48 mA) e capacitância Cg (1.22 mA);
2. Corrente não-circulante de descarga da capacitância Cwr para o rolamento DE (7.32
mA) e rolamento NDE (3.00 mA);
3. Correntes circulantes de condução, produzidas continuamente pela assimetria das
impedâncias dos rolamentos e comprovadas pela ocorrência da tensão de condução
entre as pontas do eixo;
4. Corrente circulante de descarga entre os respectivos rolamentos, com picos de 55.27
mA do rolamento DE para o rolamento NDE e 47.21 mA do rolamento NDE para o
rolamento DE, além da corrente circulante de descarga da capacitância Cg para o
rolamento DE (45.29 mA) e para o rolamento NDE (37.43 mA).
A Fig. 5.36 mostra a forma de onda das tensões entre as pontas DE e NDE do eixo
(1530.0 e 1261.0 µV), que produzem correntes circulantes de descarga e de (3.51 µV) que
geram as correntes circulantes de condução.
3.5 4 4.5 5 5.5 6 6.5 7 7.5 8
x 10-5
-6
-4
-2
0
2
4
6
x 10-3
X: 3.739e-005Y: 0.007328
Tempo(s)
Corr
ente
(A
)
X: 4.092e-005Y: 0.003009
X: 6.298e-005Y: -0.007276
Corrente Icwr

107
Fig. 5. 36: Tensões entre as pontas DE e NDE do eixo que produzem correntes circulantes de descarga e de
condução.
A Fig. 5.37 mostra o detalhe da forma de onda dos picos das tensões simuladas entre
as pontas DE e NDE do eixo que produzem as correntes circulantes de descarga, ilustradas em
uma escala de tempo menor.
Fig. 5. 37: Detalhe da forma de onda das tensões simuladas entre as pontas DE e NDE do eixo, que produzem as
correntes circulantes de descarga, mostradas numa base de tempo menor.
3.5 4 4.5 5 5.5 6 6.5 7 7.5
x 10-5
-1
-0.5
0
0.5
1
1.5
x 10-3
X: 3.758e-005Y: 0.00153
Tempo(s)
Tensão (
V)
X: 4.093e-005Y: -0.001261
X: 6.304e-005Y: -3.512e-006
Tensão entre as pontas do eixo (NDE) e (DE)
3.75 3.8 3.85 3.9 3.95 4 4.05 4.1
x 10-5
-1
-0.5
0
0.5
1
1.5
x 10-3
X: 3.758e-005Y: 0.00153
Tempo(s)
Tensão (
V)
X: 4.093e-005Y: -0.001261
Tensão entre as pontas do eixo (NDE) e (DE)

108
A Fig.5.38 mostra o detalhe da forma de onda do pico da tensão simulada entre as
pontas DE e NDE do eixo que produzem as correntes circulantes de condução, ilustrada em
uma escala de tempo menor.
Fig. 5. 38: Detalhe da forma de onda da tensão simulada entre as pontas DE e NDE do eixo que produz
a corrente circulante de condução, ilustrada em uma escala de tempo menor.
As tensões assimétricas entre as pontas do eixo em cada ruptura dielétrica assumem os
valores de pico de 1.53 mV na primeira ruptura e -1.26 mV na segunda, justificando o
aumento dos valores de pico das correntes circulantes de descarga.
Assim, são finalizadas as simulações executadas no modelo computacional do motor
de indução de teste, que se deteve à verificação das grandezas relacionadas às induções
eletrostáticas. Entretanto alterações na modelagem atual devem ser estudadas e executadas
para contemplar as induções eletromagnéticas de alta freqüência, possibilitando que sejam
avaliadas também as suas influências nas grandezas relacionadas. Isto é citado aqui apenas
para colaborar com a justificativa feita na seção 2.5.2, apontando a inexistência de uma
modelagem factível para a realização das simulações das induções eletromagnéticas de alta
frequência no eixo do rotor.
5.4 Testes Experimentais
A medição da corrente de modo comum próximo ao ponto de aterramento do motor e
da tensão Vcm, obtida entre os pontos neutro do enrolamento trifásico e de sua carcaça
aterrada, são facilmente realizadas, sem a necessidade de modificar fisicamente o motor de
4 4.5 5 5.5 6 6.5
x 10-5
-6
-4
-2
0
2
4
x 10-6
Tempo(s)
Tensão (
V)
X: 6.304e-005Y: -3.512e-006
Tensão entre as pontas do eixo (NDE) e (DE)

109
teste. No entanto, para as medições das tensões entre as pontas do eixo e sobre os respectivos
rolamentos, é necessário adaptar um conjunto de porta-escovas nas respectivas pontas do eixo
e, para realizar as medições das correntes que fluem pelos rolamentos, é preciso isolá-los
eletricamente dos seus respectivos mancais. Assim sendo, nesta seção são mostradas tais
modificações físicas executadas no motor de teste e os respectivos resultados das medições.
5.4.1 Motor de Teste Especialmente Modificado
Inicialmente, são adaptados conjuntos de porta escovas e escovas de carbono-grafite
nas pontas do eixo DE e NDE, de forma a transferir os respectivos potenciais dessas pontas
para as extremidades F e G dos condutores, como ilustra a Fig. 5.39. Além disso, os mancais
dos rolamentos são embuchados com um material isolante de nylon, com 1.0 mm de
espessura, de forma a isolar a pista externa do rolamento das respectivas tampas do motor.
Uma arruela de bronze é ajustada para se manter em contato com a pista externa do rolamento
e um fio de cobre, denominado condutor de desvio, tendo uma das extremidades ligada
solidamente a esse anel e a outra extremidade saindo por um orifício localizado nas
respectivas tampas do motor, de forma a permitir o acesso aos terminais dos condutores de
desvio através dos pontos A e C (Fig. 5.39). Esses terminais têm a alternativa de serem
conectados, respectivamente, aos terminais B e D dos condutores que estão firmemente
ligados à carcaça do motor, na caixa de conexões.
Fig. 5. 39: Modificações especiais executadas no motor de teste, figura extraída a partir de (SHAMI e AKAGI,
2009).

110
Os detalhes do porta-escovas na ponta NDE do eixo e da sonda de corrente
envolvendo o respectivo condutor de desvio são mostrados na Fig. 5.40. Essas modificações
especiais permitiram as medições das tensões entre os pontos F e B, G e D dos respectivos
rolamentos e da tensão entre as pontas do eixo, medida entre os pontos F e G (Fig. 5.39). As
correntes que fluem pelos respectivos rolamentos são verificadas através das sondas de
corrente que envolvem os respectivos condutores de desvio. A tensão Vcm foi medida entre o
ponto neutro do enrolamento trifásico e o ponto de aterramento localizado na caixa de
conexão do motor, como ilustra a Fig. 5.41, lembrando que, para tal finalidade, o enrolamento
trifásico foi conectado em estrela. A corrente de modo comum do motor foi medida próximo
ao ponto de aterramento de sua carcaça, localizado na caixa de conexões.
Fig. 5. 40: Porta escovas na ponta NDE do eixo e a sonda de corrente no condutor de desvio.

111
Fig. 5. 41: Detalhe do ponto neutro do enrolamento trifásico e de aterramento da carcaça.
A relação de tensão dos rolamentos (BVR) é medida, indiretamente, utilizando-se os
valores medidos das tensões induzidas eletrostaticamente sobre os rolamentos e do ponto
comum do enrolamento para a terra.
5.4.2 Resultados dos Testes Experimentais
Os instrumentos utilizados nas medições são os seguintes:
1. Ponta de prova para medição de alta tensão diferencial, Tektronix, modelo P5200, que
é ilustrada no apêndice D, Fig. D.1;
2. Ponta de prova para medição de corrente (current probe), Tektronix, modelo A6302,
faixa de frequência entre 0 a 50 MHz, corrente máxima 20.0 A, como mostrada no
apêndice D, Fig. D.2;
3. Amplificador para ponta de prova de corrente, Tektronix, modelo TM 502A, ilustrado
no apêndice D, Fig. D.3;
Ponto neutro do enrolamento trifásico
Ponto de aterramento da carcaça

112
4. Osciloscópio digital, Tektronix, modelo TDS 1001B, 40 MHz e 500 MS/s, conforme é
mostrado no apêndice D, Fig. D.4.
A forma de onda da tensão Vcm é mostrada na Fig. 5.42 (a) até (c), para a condição
dos pontos A e B, C e D estarem desconectados (Fig. 5.39). O valor medido das variações da
tensão Vcm está em torno de 100 Volts, ou seja, Vcc/3 como era de se esperar, considerando-
se que o amplificador da ponta de prova de tensão foi calibrado em 1/500 e as escalas de
tempo são ajustadas para 50, 25 e 10 µs, respectivamente.
(a)
(b)
(c)
Fig. 5. 42: Tensão Vcm, medida entre o neutro do motor e a carcaça aterrada, em escalas de tempo diferentes.
As medições da tensão de eixo e da corrente de modo comum são executadas
simultaneamente e os resultados apresentados, respectivamente, nos canais 1 e 2 do
osciloscópio. Nesta situação, os pontos F e G (Fig. 5.39) são curto-circuitados. A diferença de

113
tensão entre tal ponto e a carcaça aterrada é observada e registrada. Neste caso, os pontos A e
B, C e D (Fig. 5.39) são conectados, de modo a permitir a medição da corrente de modo
comum no ponto de aterramento do motor, próximo a sua caixa de conexões. As formas de
onda da tensão de eixo e da corrente de modo comum são mostradas na Fig. 5.43 (a) até (c),
dando-se ênfase às correntes não-circulantes de condução, ou seja, aquelas fruto da aplicação
dos dv/dts de Vcm nas capacitâncias Cwf, Cg e Cb. Nesta situação, os amplificadores de tensão
e de corrente são calibrados, respectivamente, em 1/50 e 5 mA/divisão. Os valores de pico da
corrente de modo comum variando entre 2 e 10 mA são mostrados na Fig. 5.43 (a), onde
também podem ser verificadas as suas variações temporais que se apresentam em sincronismo
com aquelas da tensão de eixo. Correntes não circulantes de condução com amplitudes de 6
mA e a tensão de eixo com a magnitude de 2 V (entre os seus patamares) são medidos,
conforme ilustra a Fig. 5.43 (b). A relação BVR de 2% é estabelecida a partir das tensões de
eixo e Vcm, tal valor é superior ao obtido nas simulações (1.28%), apresentando uma
diferença percentual de 56.25%. Tal discrepância muito provavelmente é função das
incertezas resultantes dos cálculos das respectivas capacitâncias do enrolamento para o núcleo
do rotor (Cwf), do núcleo do estator para o núcleo do rotor (Cwr) e dos rolamentos (Cb).
Entretanto, a forma de onda da tensão eletrostática induzida sobre os rolamentos se mostra
idêntica à da tensão Vcm, em termos das variações temporais, mudando-se apenas a
proporção de suas amplitudes, devido ao divisor de tensão capacitivo. Isto evidencia a
concordância entre as afirmações contidas nos capítulos 2 e 3 a este respeito, bem como dos
resultados das simulações correlacionadas e exibidas na seção 5.3.1.
(a)
(b)
Fig. 5. 43: Tensão induzida no eixo da máquina (curva superior) e correntes nos rolamentos do motor,
enfatizando-se as componentes de condução (curva inferior).

114
A Fig. 5.44 (a) até (d) mostra a tensão sobre o rolamento e a corrente de modo comum
na saída do motor, próximo à caixa de conexão, enfatizando a ocorrência das correntes não-
circulantes de descarga. Correntes de descarga de 390 e 380 mA são verificadas na Fig. 5.44
(a) e (b), coincidindo com as respectivas bordas de descida da tensão de eixo; intensidades de
500 e 350 mA são mostradas na Fig. 5.44 (c) e (d), respectivamente, onde se observa a não-
coincidência de sua manifestação com os dv/dts da tensão de modo comum. Picos de
correntes não-circulantes de condução, em torno de 80 mA, também são verificados na Fig. 5.
44, sendo que tais valores estão bem abaixo dos picos de 368 mA observados nas simulações.
Nestes casos, os respectivos amplificadores de tensão e de corrente são calibrados em 1/50 e
100 mA/divisão.
(a)
(b)
(c)
(d)
Fig. 5. 44: Tensão induzida no eixo da máquina (curva superior) e corrente de modo comum no aterramento do
motor, enfatizando sua componente de descarga (curva inferior).

115
A tensão induzida eletromagneticamente descrita por (ALGER e SAMSON, 1924, p.
235-245), é observada das pontas do eixo (NDE e DE, respectivamente) para o ponto de
aterramento da carcaça, quando os rolamentos são novamente isolados das respectivas
tampas, através do desligamento dos pontos A e B, C e D (Fig. 5.39). A Fig. 5.45 (a) mostra
as idênticas formas de onda dessa tensão com o valor de pico de 37.5 V, nas respectivas
extremidades do eixo, cujo amplificador de tensão é ajustado em 1/50. Tal tensão, originada
por induções eletromagnéticas (60 Hz), modula a tensão induzida eletrostaticamente no eixo,
que tem a amplitude de 2 V (entre os patamares), como mostra a Fig. 5.45 (b). Todavia, vale
ressaltar que, quando é feita a conexão dos pontos A e B, C e D, a amplitude dessa tensão
senoidal no eixo reduz-se para valores entre 13 e 15 V.
(a)
(b)
Fig. 5. 45: (a) tensão induzida eletromagneticamente das pontas DE e NDE para o ponto de aterramento do
motor; (b) tensão eletrostática modulada pela senóide.
Os pontos A e B, C e D (Fig. 5.39) são religados e as formas de onda da tensão
registradas entre as pontas do eixo confirmam indiretamente a presença das correntes
circulantes de condução e de descarga, como mostra a Fig. 5.46 (c) e (d). O pico de tensão de
900 mV, caracterizado como de descarga, é mostrado na Fig. 5.46 (a), numa base de tempo de
500 ηs e com o amplificador de tensão ajustado em 1/50. A tensão entre as pontas do eixo e as
correntes de rolamentos é registrada, respectivamente, nos canais 1 e 2 do osciloscópio. Essas
formas de onda são mostradas na Fig. 5. 46 (b) até (d), onde se verifica que os pulsos de
tensão entre as pontas do eixo se apresentam em sincronismo com as bordas da tensão dos
rolamentos, com amplitudes em torno de 250 mV. Reportando aos resultados das simulações
realizadas, o valor observado para a diferença de potencial entre as pontas do eixo foi de cerca
de 5 µV, quando da circulação de correntes de condução e aproximadamente 1.5 mV na

116
ocorrência de correntes circulantes de descarga. Não é possível identificar, nas formas de
onda medidas, qual manifestação dessa tensão se refere a cada uma dessas correntes; de
qualquer forma, os valores medidos mostram-se absolutamente destoantes daqueles
simulados. Isso se deve muito provavelmente à natureza e ao valor da impedância
arbitrariamente escolhida para o eixo, considerada na simulação como sendo puramente
resistiva e com o valor de 10 mΩ.
(a)
(b)
(c)
(d)
Fig. 5. 46: Tensão entre as pontas do eixo e tensão das extremidades do eixo para o ponto de aterramento do
motor.
5.5 Conclusões
Neste capítulo, o sistema de acionamento real constituído por um conversor de
frequência, cabos de interligação e motor de indução é representado pela modelagem
universal. O procedimento adotado para a determinação de todos os parâmetros deste modelo

117
é apresentado; todavia, vale ressaltar que são encontradas dificuldades para a determinação da
capacitância total do enrolamento trifásico para a carcaça (Cwf-total), resistência entre espiras
das bobinas de uma mesma fase (Rws), impedância do rolamento (Zb) e impedância do semi-
eixo do rotor.
A modelagem universal, apesar de apresentar muitas vantagens na representação do
motor em relação aos fenômenos das induções eletrostáticas, não reproduz as induções
eletromagnéticas, de baixa frequência, que são identificadas nos resultados dos testes
experimentais. Portanto, devem ser incorporados alguns elementos nesta modelagem para
que as tensões induzidas eletromagneticamente no eixo do rotor também possam ser
representadas.
As simulações computacionais servem para verificar as formas de onda de várias
grandezas descritas nos capítulos 2 e 3, tais como: tensão de modo comum (Vcm), tensões
sobre os rolamentos, relação de tensão dos rolamentos (BVR), correntes não-circulantes de
condução e descarga, tensão entre as pontas do eixo e correntes circulantes de condução e
descarga.
Os resultados experimentais mostram que a tensão induzida eletromagneticamente no
rotor, assume alguma responsabilidade no carregamento do eixo até os limites que excedem a
tensão de ruptura da película de lubrificação dos rolamentos. Todavia, apesar de sua elevada
amplitude a influencia desta componente na efetiva desrupção do dielétrico e, portanto, na
produção de correntes de descarga não foi analisada. No que diz respeito à determinação do
BVR, tem-se que a diferença entre o valor simulado e aquele obtido a partir dos experimentos
é causada pelos erros cumulativos ocorridos na determinação analítica das capacitâncias da
máquina.

Capítulo 6 – Conclusões Gerais e
Propostas de Continuidade
6.1 Conclusões Gerais
Nesta dissertação, é apresentada uma investigação detalhada dos diversos fenômenos
de alta frequência presentes em motores de indução trifásicos acionados por conversores
PWM. A análise teve início com a introdução do conceito da tensão de modo comum gerada
pela ponte inversora, a qual está relacionada intrinsecamente à modulação por largura de
pulso. Tais tensões sofrem rápidas variações no tempo de acordo com o chaveamento dos
IGBTs, induzindo tensões eletrostáticas e eletromagnéticas por vários acoplamentos dentro do
motor, inclusive no seu eixo. O estudo das correntes não-circulantes e circulantes envolvidas
delineia as rotas de acoplamento dentro do motor de indução. Concomitantemente, são
estabelecidos os cálculos das capacitâncias do circuito eletrostático básico a partir das
dimensões e características geométricas do motor de indução. Obstáculos são encontrados
para a definição do valor da capacitância dos rolamentos, devido à incerteza com relação ao
valor da permissividade relativa da graxa lubrificante do motor modelado. O comportamento
da impedância do rolamento, em relação à resistência Rb, com a variação da velocidade do
eixo é relatado, concluindo-se que tal resistência é praticamente constante para cada tipo de
rolamento. Entretanto, seria apropriado realizar medições mais exatas dos valores de Rb para
as variadas características dimensionais dos rolamentos. De qualquer forma, é verificado que
as expressivas alterações das impedâncias de surto dos rolamentos são devido às variações
instantâneas das capacitâncias dos mesmos. Tal fato serve para balizar, numa primeira
aproximação, o valor constante de Rb que é utilizado nas simulações, ainda que com alguma
incerteza no que tange o valor empregado. A determinação da resistência existente entre as
espiras do enrolamento é outra dificuldade encontrada, uma vez que, em principio, a
modelagem utilizada requer a medição da resposta em freqüência da impedância do
enrolamento trifásico, de modo a extrair a sua componente real na primeira frequência de
ressonância. Não havendo disponibilidade dos instrumentos exigidos para a realização desta
medição, o problema foi contornado ao se empregar o valor medido em outra referência para

119
um motor de indução de mesma potência nominal do que é empregado neste trabalho,
gerando mais um ponto de incerteza na modelagem resultante. Uma vez determinados todos
os parâmetros associados à modelagem empregada, procedeu-se à execução das simulações,
possibilitando a verificação das grandezas em estudo. As correntes de condução e de descarga
são analisadas, caracterizadas e associadas às correntes do tipo não-circulantes e circulantes,
as quais são geradas pelas tensões induzidas eletrostaticamente no motor.
Uma abordagem específica do cálculo da área de contato AH é realizada para apontar a
complexidade para a determinação do somatório das curvaturas internas e externas que
refletem a superfície côncava e convexa das esferas e pistas, devido à variação do ângulo de
contato entre esferas e pistas, mesmo que considerando a carga constante sobre o rolamento.
A densidade da corrente no rolamento é definida para comprovar que os danos nos rolamentos
estão relacionados não somente à amplitude da corrente que flui por eles, mas também da área
de contato AH. A relação da vida útil dos rolamentos é baseada nos estudos dos danos
causados pela magnitude da densidade de corrente sobre eles. A relação de estresse associa a
densidade de corrente, tempo de operação do motor e frequência de comutação da ponte
inversora, onde é constatado que tal relação pode ser reduzida com a diminuição da
frequência de comutação, aumento da área de contato ou redução da amplitude dos picos das
correntes de descarga ou condução. Na análise das variáveis que modificam o valor da
capacitância Cb, destaca-se a carga sobre o rolamento, viscosidade do lubrificante, variação da
temperatura e características dos aditivos, que, em última análise, causam variações na
espessura da película lubrificante (hlb). A curva de Stribeck é examinada, verificando-se a
relação entre a característica hidrodinâmica da película lubrificante e a velocidade do
rolamento. Em baixas velocidades, o coeficiente de atrito aumenta, reduzindo a vida útil do
rolamento; todavia, a natureza da impedância do rolamento torna-se mais resistiva, reduzindo
as correntes de descarga. Entretanto, em velocidades mais elevadas, o coeficiente de atrito
diminui, aumentando a vida útil do rolamento, mas, devido à natureza mais capacitiva da
impedância em tal situação, a intensidade das correntes de descarga aumenta. Então, há que se
procurar um ponto de equilíbrio onde se tenha uma boa característica hidrodinâmica e,
concomitantemente, a minimização das correntes de descarga. A rigidez dielétrica da película
lubrificante é estabelecida com o valor típico de 15 V/µm para uma variação típica da
espessura da película lubrificante entre 0.2 e 2.0 µm. Com isto, a faixa da tensão limite de
ruptura da película lubrificante é estabelecida entre 3 e 30 V, sendo que a mesma pode ser
variada por qualquer fator que altere a espessura da película de lubrificação do rolamento.
Com um melhor entendimento dos mecanismos dinâmicos que mudam o valor da

120
capacitância do rolamento, é possível avaliar as diversas modelagens utilizadas nas
investigações dos fenômenos de alta frequência associados ao motor de indução suprido por
tensões PWM.
Ao pesquisar as modelagens que envolvem o enrolamento, eixo e rolamentos do motor
de indução, é percebida uma evolução dos mesmos, sendo abordadas oito modelagens nesse
trabalho. Dentre elas, é destacada a modelagem universal do motor de indução, que foi
elaborada a partir do modelo T-equivalente da norma (IEEE STD 112, 2004). Tal modelagem
aproveita os parâmetros obtidos nos ensaios em vazio e com o rotor bloqueado, na frequência
fundamental, proporcionando a determinação de vários parâmetros de alta frequência,
inclusive aquelas referidas às primeiras espiras das bobinas de fase. Atualmente, não existe
uma modelagem do motor que considere de modo factível as induções eletrostáticas e
eletromagnéticas simultaneamente; desta forma, há muito que ser realizado e os problemas
não são triviais.
Na tentativa de se detectar as possíveis falhas do sistema modelado, modificações
especiais no motor de indução são executadas para permitir os testes experimentais. Os
resultados destes testes desmitificam algumas realidades:
A tensão induzida eletromagneticamente no eixo, em baixa frequência,
contribui efetivamente para o acúmulo da tensão de modo comum sobre o mesmo;
embora os mecanismos associados às correntes de descarga provenientes dessa parcela
de tensão do eixo não tenham sido caracterizados;
A relação de tensão sobre os rolamentos (BVR) não está sempre em torno de
10%, tal como relatado na maior parte das referências consultadas. Tanto na simulação
quanto nos testes experimentais essa relação situou-se entre 1 e 2%. Além disso, os
testes experimentais mostram que a tensão sobre o eixo está na faixa de 7 a 14 V,
considerando-se a composição das induções eletrostáticas e eletromagnéticas.
6.2 Propostas de Continuidade
Diante dos desafios encontrados no desenvolvimento desta dissertação, algumas
propostas de continuidade do presente trabalho são elaboradas, conforme descrito a seguir:
Analisar uma forma alternativa de se obter com mais facilidade e exatidão a espessura
da película lubrificante (hlb) e a área de contato da superfície hertziana (AH);

121
Investigar um meio de se determinar a permissividade relativa da graxa de lubrificação
(εrlub) utilizada em rolamentos específicos dos motores elétricos;
Avaliar um modo de se estabelecer com simplicidade e exatidão a resistência de
contato entre as esferas e pistas dos rolamentos (Rb);
Investigar um procedimento efetivo de medição da impedância do eixo ou semi-eixos
para uma ampla faixa de frequências;
Verificar, detalhadamente, o comportamento das correntes de condução e de descarga
nos rolamentos, quando o motor de indução é alimentado apenas pela fonte trifásica
senoidal, caracterizando-se os mecanismos da produção de descargas pela tensão
senoidal eletromagneticamente induzida no eixo;
Incorporar no modelo universal do motor de indução, os elementos geradores das
induções eletromagnéticas no eixo do rotor, visando melhorar as respostas da
modelagem em comparação com os resultados experimentais.

122
Referências bibliográficas
ADABI, J. E. et al. Bearing damage analysis by calculation of capacitive coupling between
inner and outer races of a ball bearing. 13th International Power Electronics and Motion
Control Conference (EPE-PEMC 2008), p. 903-907, 2008.
ALGER, P. L.; SAMSON, H. Shaft currents in electric machines. Transactions A. I. E. E.,
Philadelphia, p. 235-245, Fevereiro 1924.
AMMANN, C. et al. Shaft voltages in generators with static excitation systems - problems and
solution. Transactions on energy conversion - IEEE, Junho 1988. 409-419.
ARRILLAGA, J. et al. Power system harmonics. [S.l.]: John Wiley & Sons, 1985.
BELL, S. Experience with variable frequency drives and motor bearing reliability. IEEE
Transactions on Industry Applications, p. 253-262, 1998.
BHATTACHARYA, S. et al. Experimental comparison of motor bearing currents with PWM
hard-and soft-switched voltage-source inverters. IEEE Transactions on power eletronics,
1999. 552-562.
BINDER, A.; MUETZE, A. Scaling effects of inverter-induced bearing currents in AC machines.
IEEE Transactions on industry applications, Vol. 44, Nº 3, Maio/Junho 2008. 769-776.
BONNETT, A. H. Cause and analysis of anti-friction bearing failures in A.C. induction motors.
U.S Electrical motors division of Emerson Electric, junho 1993. 36-46.
BOYANTON, H. E.; HODGES, G. Bearing Fluting. IEEE - Industry Applications Magazine , p. 53-
57, Setembro/Outubro 2002.
BUSSE, D. et al. An evaluation of the electrostatic shielded induction motor: a solution for
rotor shaft voltage buildup and bearing current. IEEE IAS conference, San Diego, Outubro
1996.
BUSSE, D. et al. Bearing currents and their relationship to PWM drives. IEEE - Transactions
on Power Electronics, 1995. 698-705.
BUSSE, D. et al. System electrical parameters and their effects on bearing currents. IEEE
Transactions on industry applications, Março/abril 1997. 577-584.

123
BUSSE, F. D. et al. The effects of PWM voltage source inverters on the mechanical
performance of rolling bearings. IEEE - Transactions on Industry Applications, v. 33, p. 567-
576, MARÇO/ABRIL 1997.
CACCIATO, M. et al. High frequency modeling of bearings currentes and shaft voltage on
electrical motors. Miurprin projeto 2003: ‘Topologias de conversão inovadoras para
acionamentos elétricos’, 2003. 2065-2070.
CHAVES, C. S. et al. Capacitances calculation using FEM for transient overvoltage and
common mode currents prediction in inverter-driven induction motors. IEEE - PES
Trondheim PowerTech 2011, Junho 2011 - Junho.
CHAVES, C. S. et al. Induction motor capacitances calculation using FEA for common mode
current studies in ATP. ICREPQ 11 - Internacional Conference on Renewable Energies and
Power Quality, Las Palmas de Gran Canaria (Spain), Abril (13 até 15) 2011 (Abril).
CHEN, S.; FITZGERALD, D. Source of induction motor bearing currents caused by PWM
inverters. IEEE - Transaction Energy Conversion , 11, Março 1996. 25-32.
CHEN, S.; LIPO, T. A.; FITZGERALD, D. Modeling of motor bearing currents in PWM inverter
drives. IEEE - Transactions on industry applications, v. 32, p. 1365-1370, Novembro-
Dezembro 1996.
CHEN, S.; LIPO, T. A.; NOVOTNY, D. W. Circulating type motor bearing current in inverter
drives. IEEE - Industrial Electronics Society, Setembro 1996. 162-167.
COSTELLO, M. J. Shaft voltages and rotating machinery. IEEE - Transactions on Industry
Applications, v. 29, p. 419-426, Março/Abril 1993.
ENDO, H. Analysis of current density at d.c. motor bearing. Shinko Electric -Ltda, 21 Janeiro
1978.
GUBIA, E. et al. Simplified high-frequency model for AC drives. IEEE - Power Electronics
Letter, Pamplona, p. 1144-1149, 2002.
GUBIA, E. et al. Frequency domain model of conducted EMI in electrical drives. IEEE Power
Electronics Letters, Junho 2005. 45-49.
HALKOSAARI, T.; TUUSA, H. Reduction of conducted emissions and motor bearing currents in
current source PWM inverter drives. PESC-1999 - 30th Annual IEEE - Power Electronics
Specialists Conference, 1999, 1999. 959-964.
HARRIS, T. Rolling bearing analysis. 3ª. ed. New York: Wiley, 1991.

124
HAUS, O. Shaft voltage and bearing currents - causes, effects and remedies. ETZ-A, p. 105-
112, 1964.
HOPPLER, R.; ERRATH, R. A. Motor bearings, not just a piece of metal. IEEE-IAS/PCA Cement
Industry Conference, p. 214-233, 29 Abril - 03 Maio 2007.
HYYPIO, D. Mitigation of bearing electro-erosion of inverter-fed motors through passive
common mode voltage suppression. IEEE - Transactions on Industry Applications, 2003.
875-882.
IEEE STD 112, (. Test procedure for polyphase induction motors and generators, 2004.
IMMOVILLI, F. et al. Detection of generalized-roughness bearing fault by spectral-kurtosis
energy of vibration or current signals. IEEE - Transactions on Industrial Electronics, v. 56, p.
4710-4717, Novembro 2009.
JOUANNE, A. V.; ZHANG, H. A dual-bridge inverter approach to eliminating common mode
voltages and bearing and leakage currents. IEEE - Power Electronics Specialists Conference,
PESC, 1997, 28th Annual IEEE, St. Louis, MO, 22 a 27 Junho 1997. 1276-1280.
JOUANNE, A. V.; ZHANG, H.; WALLACE, A. K. An evaluation of mitigation techniques for
bearing currents, EMI and over-voltages in ASD applications. IEEE - Industry Applications
Conference, 1997, 32th IAS Annual Meeting, IAS '97, Conference Record of the 1997 IEEE,
New Orleans, LA, USA, p. 478-485, Outubro 1997.
KERKMAN, R. J. et al. The effects of PWM voltage source inverters on the mechanical
performance of rolling bearings. IEEE - Transactions on Industry Applications , San Jose, CA,
v. 33, p. 567-576, MARÇO/ABRIL 1997.
KRUMPOLC, E. Bearing currents and shaft voltages in electric machines. Electrotechnik, v.
45, p. 88-91, Abril 1990.
KULDA, V. Bearing currents in electrical machines. Czechtech Journal "The Electrical
Engineer", 1965. 323-326.
LINK, P. J. Minimizing electric bearing currents in ajustable speed drive systems. IEEE - Pulp
and Paper Industry Technical Conference, 1998. Conference Record of Annual 1998,
Portland, ME, 21 a 26 Junho 1998. 181-195.
MAGDUN, O.; BINDER, A. Calculation of roller and ball bearing capacitances and prediction
of EDM currents. Industrial Electronics 2009, IECON '09, 35th Annual Conference of IEEE,
Porto, 3 a 5 Novembro 2009. 1051-1056.

125
MIRAFZAL, B. et al. Universal induction motor model with low-to high ferquency response
characteristics. Industry Applications Conference, 2006. 41st IAS Annual Meeting.
Conference Record of the 2006 IEEE, Tampa, FL, 8 a 12 Outubro 2006. 423-433.
MOREIRA, A. F. et al. High frequency modeling for cable and induction motor overvoltage
studies in long cable drives. IEEE - Transactions on Industry Applications, v. 38, p. 1297–
1306, Setembro/Outubro 2002. ISSN 5.
MUETZE, A. et al. Experimental evaluation of the endangerment of ball bearings due to
inverter-induced bearing currents. Industry Applications Conference, 2004. 39th IAS Annual
Meeting. Conference Record of the 2004 IEEE, 3 a 7 Outubro 2004. 1989-1995.
MUETZE, A.; BINDER, A. Experimental evaluation of mitigation techniques for bearing
currents in inverter-supplied drive-systems - Investigations on induction motors up to 500
kW. IEEE, 2003. 1859-1865.
MUETZE, A.; BINDER, A. Calculation of motor capacitances for prediction of the voltage
across the bearings in machines of inverter-based drive systems. IEEE - Transactions on
Industry Applications, v. 43, p. 665-672, Maio/junho 2007.
NACHI, B. L. Rolamentos fixos de esferas, 22 Agosto 2007. 138-164. Acesso em: 7 Dezembro
2010.
OGASAWARA, S.; AKAGI, H. Modeling and damping of high frequency leakage currents in
PWM inverter-fed AC motor drive systems. Industry applications Conference, 1995.
Thirtieth IAS Annual Meeting, IAS '95., Conference Record of the 1995 IEEE, Orlando, FL,
USA, 8 a 12 Outubro 1995. 29-36.
ONTTO, P. M.; LUOMI, J. Bearing current prevention of converter-fed AC machines with a
conductive shielding in stator slots. Electric Machines and Drives Conference, 2003. IEMDC
'03. IEEE Internacional, p. 274-278, Junho 2003.
ONTTO, P. M.; LUOMI, J. Induction motor model for the analysis of capacitive and induced
shaft voltages. Electric Machines and Drives, 2005 IEEEE International Conference on, San
Antonio, TX, 15 Maio 2005. 1653-1660.
PAULA, H. D. Uma nova metodologia para a determinação dos fenômenos de alta freqüência
em sistemas de acionamento de motores de indução através do inversor PWM. Tese de
doutorado - Capítulo 5, Uberlândia-UFU, p. 130-154, 2005.

126
PAULA, H. et al. Uma proposta para modelagem de inversores para o estudo de correntes de
modo comum em sistemas de acionamento de motores. Universidade Federal de Minas
Gerais, Belo Horizonte, Fevereiro 2011.
RASHID, M. H. Eletrônica de potência: circuitos , dispositivos e aplicações. São Paulo:
Makron Books, 1999.
SHAMI, U. T.; AKAGI, H. Experimental discussions on a shaft end-to-end voltage appearing in
an inverter-driven motor. IEEE - Transactions on power electronics, v. 24, p. 1532-1540,
Junho 2009.
SHARIFIAN, M. B. B. et al. Slot fringing effect on the magnectic characteristics of eletrical
machines. Journal of Electrical Engineering, v. 60, p. 18-23, 2009.
SKIBINSKI, G. L. et al. Effect of PWM inverters on AC motor bearing currents and shaft
voltages. IEEE IAPEC Conference 1995, Dallas, 32, Março 1995.
SUWANKAWIN, S.; SUKHAPAP, C. Destruction by charge current and its solution for PWM
inverter feeding multiple motors through long cables. Industry Applications Conference,
2005. Fourtieth IAS Annual Meeting. Conference record of the 2005, v. 2, p. 1382-1389,
Outubro 2005.
WANG, S. S.; TUNG, S. C. Using electrochemical and spectroscopic techniques as probes for
investigating metal—Lubricant interactions. Trans. Society Triboligists Lubrication
Engineers, v. 33, p. 563–572, 1990.
WITTEK, E. et al. Capacitances and lubrificant film thicknesses of motor bearings under
different operating conditions. Electrical Machines (ICEM), 2010 XIX International
conference on , Roma, 6 a 8 Setembro 2010. 1 a 6.
XIANG, Y. Q. A novel active common-mode -volt age compensator (ACCOM) for bearing
current reduction of PWM VSI-Fed induction motors. Applied Power Electronics Conference
and Exposition, 1998. APEC '98. Conference Proceedings 1998., Thirteenh Annual,
Anaheim, CA, USA, 15 a 19 Fevereiro 1998. 1003-1009.

Apêndice A – Cálculo da Área de Contato
Hertziana
As equações baseada na teoria do ponto de contacto hertziano, tal como previsto por
Harris gera curvas relacionando a área de contato com a carga. Uma única fila de esferas
radial do rolamento satisfaz as suposições das equações hertzianas. Os parâmetros mecânicos
necessários obtidos dos fabricantes dos rolamentos incluem: o diâmetro da pista interna (di)
em milímetros, o diâmetro externo (do) em milímetros, o diâmetro da esfera (D) em
milímetros, dois índices, o da curvatura da pista interna (ri) e o da curvatura da pista externa
(ro), e α o ângulo de liberdade em graus. A Fig. A.1 identifica estas dimensões mecânicas.
Fig. A.1: Dimensões do rolamento para o cálculo do ponto de contato áspero.
Utilizando as equações de Harris, a área de contato pode ser calculada para a
superfície interna e externa da pista do rolamento. Primeiro, a área do ponto de contato
depende do ângulo de liberdade, dado por:
(A.1)
A área de contato também requer o raio do sulco externo e interno, definido por:
(A.2)

128
A seguir, as quantidades de menores dimensões são determinadas:
(A.3)
A Fig. A.1 mostrou o diâmetro médio definido como:
(A.4)
A quantidade de menor dimensão que relaciona o comprimento do arco de contato da esfera
com o diâmetro médio é definido por:
(A.5)
A superfície de contato da curvatura é inversamente relacionada ao diâmetro da esfera porque
a esfera e a pista estão em movimento relativo, ou seja, quanto maior o diâmetro menor é a
superfície de contato da curvatura. Os somatórios das curvaturas interiores e exteriores
são usados, e eles devem refletir a superfície côncava e convexa das esferas e
pistas:
(A.6)
As diferenças de curvatura de menores dimensões para a pista interior e exterior, ,
completam os cálculos dos parâmetros e são dadas por:
(A.7)
As diferenças de curvatura do interior e do exterior, , estão sempre entre 0,0
e 1,0 e tem o valor nominal de 0,9. As quantidades intermediárias e são valores que
podem ser obtidos através da vista de cima da mesa ou de avaliação com os métodos
computacionais, relacionando os valores da diferença de curvatura com as áreas elípticas.
Estas quantidades dependem da excentricidade elíptica e da avaliação completa da
integral elíptica de primeira e de segunda ordem. As quantidades intermediárias e ,
juntamente com a carga , com o somatório das curvaturas e com a incorporação do termo

129
constante do módulo da elasticidade são combinadas através das equações (A.8) e (A.9)
produzindo quantidades com dimensões de comprimento em milímetros:
(A.8)
(A.9)
A área de contato da superfície hertziana pode ser calculada a partir do eixo maior e do
eixo menor. Assim, a área de contato elíptica interna e externa da pista e esfera, em mm2, é
dada por:
(A.10)
Como mostram as equações de (A.8) até (A.10), a área de contato é função da carga
suportada pelo rolamento.

Apêndice B – Parâmetros da Modelagem
de (GUBIA, 2002)
Modelagem com resposta em frequência faixa de kHz até MHz (GUBIA, 2002, p.
1144-1149).
Fig. B.1: Modelo de modo comum do motor de indução com resposta em frequência de kHz até MHz.
A Fig. B.2(b) mostra a forma de onda da corrente de terra img, da tensão entre o neutro
e a carcaça Vng e da tensão entre os terminais do estator e o neutro Vsn. A Fig. B.2(a) mostra a
evolução das variáveis da Fig. B.2(b), no começo do pulso com o tempo expandido. O pico da

131
corrente inicial é devido à carga da capacitância distribuída nas primeiras espiras que
corresponde à capacitância de Ci = 3*Csg no modelo proposto. A integração da corrente de
pico dá a quantidade de carga na capacitância Ci que pode ser avaliada.
Fig. B.2: Tensões e correntes no motor de teste.
Depois deste primeiro transitório, a capacitância de Ci não influencia a onda da tensão
e da corrente no motor. A resposta do degrau para o resto do circuito é o seguinte:
(B.1)
Com,
(B.2)
Onde,
A expressão (B.1) pode ser escrita resumidamente como:
(B.3)
Uma vez que Ci pode ser calculada, os outros parâmetros podem ser estimados com a ajuda da
expressão (B.3), como mostrado a seguir:
Procedimento de cálculo:

132
I) Capacitâncias Cng e Csn: Primeiramente a capacitância Cng pode ser obtida por
meio da forma de onda da tensão Vng e da corrente img. A capacitância Csn é calculada a partir
das tensões sobre as capacitâncias;
II) Período de oscilação e ângulo ψ: Ambos são calculados usando o cruzamento
de zero da tensão Vsn;
(B.4)
(B.5)
III) Valor de pico Up: É calculado a partir da condição inicial;
(B.6)
IV) Frequência natural ωn e coeficiente de amortecimento δ: O valor do produto
δ*ωn pode ser estimado a partir de qualquer ponto diferente de zero da tensão Vng dado por
(B.3). Em particular, se o ponto escolhido é um ponto de tensão mínima (tmin, Umin), as
seguintes expressões são obtidas;
(B.7)
(B.8)
V) A indutância Lcm de dispersão de cada fase do enrolamento trifásico: A partir
da equação (B.1), e desprezando Rscm comparado com Rcm;
(B.9)
VI) A resistência Rscm: Este parâmetro é obtido diretamente medindo a resistência
do enrolamento por fase. Se necessário, os coeficientes de proximidade e pelicular devem ser
usados;
VII) A resistência Rcm: É calculada a partir da equação (B.1), sendo derivado de
Rscm.
(B.10)

Apêndice C – Modelagem Universal do
Motor de Indução
A modelagem universal é assim denominada porque combinam em um único circuito
equivalente trifásico os modelos de modo comum, modo diferencial, eixo e rolamento, sendo
uma extensão do modelo de baixa freqüência da norma (IEEE STD 112, 2004), Test
Procedure for Polyphase Induction Motors and Generators. A resposta do motor de indução
trifásico, em baixa frequência (50.0 Hz, 60.0 Hz ou 400.0 Hz), foi estudada desde a sua
origem, sendo estabelecida a norma (IEEE STD 112, 2004) para obter todos os parâmetros do
motor de indução por fase, por métodos de ensaios, utilizando o modelo T-equivalente,
mostrado na Fig. C.1.
Fig. C. 1: Modelo T-equivalente do motor indução trifásico - Norma IEEE 112.
O circuito do rotor é fisicamente isolado do circuito do estator através do entreferro e a
frequência de escorregamento do rotor é diferente da frequência do estator ou da fonte de

134
alimentação. Com o modelo da função de transferência, em baixa frequência, se obtém as
quantidades elétricas referidas à fonte de alimentação, tais como, frequência, fator de
potência, corrente e rendimento, além das quantidades mecânicas de saída como a energia,
potência e torque. Pela conveniência de análise, as grandezas elétricas do rotor são referidas
ao estator pela relação do número de espiras entre eles e executada uma conexão elétrica para
o estator. Na faixa de baixa frequência, a tensão aplicada é uniformemente distribuída através
das bobinas do enrolamento. Os parâmetros do modelo são obtidos a partir dos cálculos
matemáticos, equações heurísticas e análise por elementos finitos (FEA). A norma (IEEE
STD 112, 2004) é um método de teste universalmente aceito para determinar com precisão os
parâmetros do modelo em baixa frequência, entretanto, para corrigir a resposta em média
frequência (400.0 Hz até 20.0 kHz), deve-se correlacionar a frequência de ondulação da
portadora da corrente do motor ao aquecimento do enrolamento de cobre e às perdas na
laminação do núcleo. Os métodos de análise incluem o uso de um modelo com parâmetros
distribuídos para averiguar a distribuição dos surtos de tensão no enrolamento, onde a
capacitância Cws é distribuída entre as espiras do enrolamento do estator em paralelo com a
indutância Ls distribuída de cada espira do enrolamento do estator. A capacitância Cwf é
distribuída do enrolamento trifásico para o núcleo do estator ou carcaça aterrada, como ilustra
a Fig. C.2.
Fig. C. 2: Modelo do enrolamento em frequência intermediária e alta com parâmetros distribuídos.
O método de análise por elementos finitos tem sido utilizado para obter um modelo de
parâmetro distribuído para examinar os fenômenos de sobre tensão nos terminais dos motores

135
de indução acionados pelo conversor PWM, associando os longos condutores de alimentação
às impedâncias de surto do motor. Sabendo-se que o circuito eletromagnético do rotor não
está envolvido em qualquer efeito relacionado à penetração mínima de fluxo ou à
profundidade de penetração magnética em alta frequência. A sobre tensão da onda refletida do
modo diferencial nos terminais do motor é relacionada aos efeitos do tempo de subida em alta
frequência e confinada nas primeiras espiras do enrolamento, sendo a maior parte contida no
primeiro grupo de bobinas do enrolamento de múltiplas bobinas. Isto sugere que os
parâmetros do circuito do rotor não precisam ser modificados, em baixa freqüência, uma vez
que não têm nenhum efeito em altas frequências. Para obter um modelo em alta frequência, o
primeiro de muitos dx nas seções distribuídas (Fig. C.2) é integrado à parte de baixa
frequência existente no modelo T-equivalente (Fig. C.1). O modelo do motor de indução tem
uma resposta predominantemente capacitiva, em alta frequência, sendo indispensável para
examinar as correntes de modo comum que se deslocam nas capacitâncias existentes entre o
enrolamento do estator e a terra. A modelagem da tensão de eixo e corrente de rolamento é
capacitiva por natureza e descrita juntamente com o modelo dos enrolamentos do motor. No
intervalo de baixa frequência a tensão é distribuída uniformemente através das espiras do
enrolamento do estator, mas na faixa de médias e altas frequências o comportamento do motor
pode ser representado melhor por um modelo de parâmetros distribuídos em que o impacto do
circuito no rotor é desprezível e o comportamento do motor é alternado entre a característica
capacitiva e indutiva. Portanto, nesta modelagem são verificadas as características do motor
de indução nas frequências entre 10 Hz e 10 MHz, onde são observadas geralmente uma anti-
ressonância e duas ressonâncias. A Fig. C.3 apresenta as curvas de impedância medida no
modo diferencial versus frequência que foi obtida experimentalmente em um motor de
indução de 5 hp com as ligações dos enrolamentos do estator em 460 V e 230 V,
respectivamente, correspondendo à conexão interna dos enrolamentos ligados em série e em
paralelo (MIRAFZAL, 2006, p. 423-433). Tal figura mostra que os capacitores parasitas do
motor são função da geometria do motor e o valor da impedância é representado por um
circuito R-L equivalente, em baixa frequência, abaixo da primeira ressonância. Nesta região, a
impedância da conexão série de 460 V varia com o quadrado do número de espiras (N)2,
então, é quatro vezes o valor da impedância da ligação paralela de 230 V, devido á conexão
diferente do enrolamento do estator, como indica o ponto de 100 kHz (Fig. C.3). Também é
visto que a primeira freqüência de ressonância fr do motor de 5 hp com ligação série é quase a
metade da frequência de ressonância do mesmo motor com a ligação paralela.

136
Fig. C. 3: Medição da impedância modo diferencial versus frequência em conexões diferentes.
A Fig. C.4 mostra a impedância medida no modo diferencial versus frequência obtida
experimentalmente nos motores de 5 e 20 hp para ligação do estator em 460 V, sendo definida
a frequência de ressonância da impedância do motor quando a impedância tem o seu valor
máximo e é calculada por , onde L e C podem ser
considerados como os valores eficazes da capacitância e indutância, respectivamente. A
indutância eficaz L para uma ligação em série é quatro vezes o valor para a conexão em
paralelo e fr é a metade do valor da conexão em paralelo.
Fig. C. 4: Medição da impedância modo diferencial versus frequência para a conexão em 460 V.

137
A capacitância parasita do motor não varia significativamente com a mudança da
configuração no enrolamento do estator, porque o valor da capacitância eficaz C varia em
função da geometria do motor ou do tamanho de sua carcaça. Um fenômeno da anti-
ressonância de baixa impedância é observado no motor de 20 hp em 4.1 MHz (Fig. C.4) e a
impedância do motor é igual a 10 Ω nesta freqüência de ressonância. Esta baixa impedância
no modo diferencial, em 4.1 MHz, é aproximadamente equivalente a 2.2 Ω no circuito de
modo comum e fornece um caminho de baixa impedância de anti-ressonância para a corrente
de modo comum. Uma correlação entre um ensaio do enrolamento do estator com o fenômeno
de anti-ressonância em 4.5 MHz é visto na Fig. C.5, utilizando o enrolamento do estator de
um motor de seis pólos, 7.5 Hp, 460 V, contendo 19 espiras por bobina e 18 bobinas em série,
totalizando 342 espiras por fase. Os tempos de subida do pulso de tensão são 1.0 μs, 200 ηs e
50 ηs (Fig. C.5), correspondendo à frequência equivalente de 318 kHz, 1.6 MHz e 6.3 MHz.
O tempo de subida de 1.0 μs e 0.2 μs não excita a frequência anti-ressonante, mas o tempo de
subida de 50 ηs excita o ponto de anti-ressonância resultante em 5 MHz ou 200 ηs. A anti-
ressonância no modo diferencial também ocorreu em outros motores testados (MIRAFZAL,
2006, p. 423-433).
Fig. C. 5: Tensão medida nas primeiras espiras.
A Fig. C.6 mostra que as primeiras espiras, por exemplo, 4.0 espiras, dividido pelo
total de espiras (342 espiras), resultam no valor de abscissa igual a 0.02 pu e no valor
correspondente da tensão de pico da onda refletida de 0.35 pu sobre as espiras, no tempo de

138
subida de 60 ηs da tensão de impulso. O primeiro grupo de bobina em 0.16 pu, já obteve o
pico de tensão mais alto possível. Estes dados justificam as corretas formas de onda refletida
que são obtidas usando-se apenas a capacitância Cwf-effective, definida na primeira bobina da
primeira ranhura. Para verificar o modelo proposto foram testados motores de indução de 20 e
100 hp. A medição da resposta em freqüência da impedância no modo diferencial do motor é
feita utilizando um analisador de freqüências que mostra as amplitudes e ângulos de fase, que
são representados graficamente na faixa de frequências entre 100 Hz e 10 MHz.
Fig. C. 6: Medição de tensão sobre espiras, em pu, versus razão espiras/total de espiras.
A Fig. C.7 mostra uma boa aproximação entre os resultados dos cálculos e das
medições para amplitude e ângulo de fase da impedância no modo diferencial para o motor de
100 hp e 460 V, em função da frequência.
Fig. C. 7: Cálculo e medição impedância modo diferencial motor de 100 hp, 460 V.

139
É importante observar o defasamento entre a impedância de modo diferencial
registrado pelo medidor de LCR, para o escorregamento igual a 1, da ligação em triângulo no
motor de 100 hp e a impedância do modelo proposto, utilizando os componentes do circuito
T- equivalente de baixa frequência entre 20 Hz e 10 kHz. A medição da resistência c.c.
correspondente ao parâmetro Rs da norma (IEEE STD 112, 2004) foi medida pelo mili-
ohmímetro (mΩ). A proposta de alteração do modelo T-equivalente, com o escorregamento
igual a 1, considera que a indutância de dispersão do rotor é (Llr << Lm) para que a indutância
de entrada seja aproximadamente igual à (Lls + Llr). Na realidade em níveis de baixo fluxo, a
relação de transformação (Ns/Nr) do rotor pode ser isolada para que a indutância da entrada
apareça principalmente como a soma da indutância Lls para uma grande variação da
indutância de magnetização Lm. A medição e o cálculo da impedância de modo comum versus
resposta em frequência do modelo proposto são mostrados na Fig. C.8 e apresentaram uma
boa concordância para um motor de 100 hp, 460 V.
Fig. C. 8: Cálculo e medição impedância modo comum dos motores de 5 e 100 hp, 460 V.
A capacitância Cwf-0 é concentrada no ponto neutro do enrolamento do estator, como
mostrada Fig. C.9, para dar resposta em baixa frequência, enquanto que a resposta em alta
frequência é dada pela capacitância Cwf-effective.

140
Fig. C. 9: Proposto modelo universal do motor de indução por fase.
A fim de modelar as mencionadas freqüências de anti-ressonância e de ressonância,
três capacitores Cwf-effective, Cwf-0 e Cwf são propostos como elementos adicionais do modelo T-
equivalente da Fig. C.1 e representam as características de comportamento do motor na faixa
de média e alta frequência. A capacitância Cwf é a capacitância total do estator para a carcaça,
a capacitância Cwf-effective representa a capacitância do estator para a carcaça da primeira
ranhura por fase (nas primeiras 4 espiras), a capacitância Cwf-0, ligada do neutro do
enrolamento do estator para a carcaça, representa o restante das espiras do enrolamento. A
capacitância Cws representa a capacitância entre as espiras das bobinas por fase. Nesta
proposta são obtidas as frequências de ressonância curto-circuitando todos os resistores da
modelagem por fase e resolvendo-se a equação quadrática (C.1) e em seguida (C.2).
(C. 1)
Onde,
(C. 2)
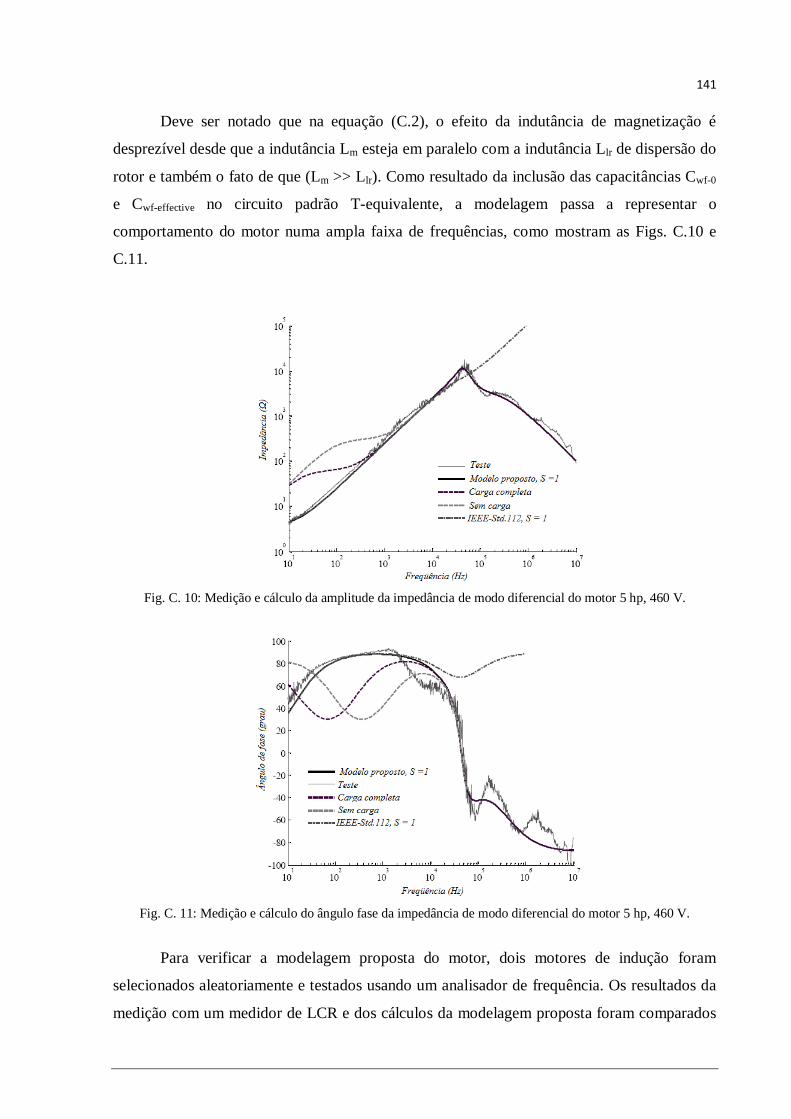
141
Deve ser notado que na equação (C.2), o efeito da indutância de magnetização é
desprezível desde que a indutância Lm esteja em paralelo com a indutância Llr de dispersão do
rotor e também o fato de que (Lm >> Llr). Como resultado da inclusão das capacitâncias Cwf-0
e Cwf-effective no circuito padrão T-equivalente, a modelagem passa a representar o
comportamento do motor numa ampla faixa de frequências, como mostram as Figs. C.10 e
C.11.
Fig. C. 10: Medição e cálculo da amplitude da impedância de modo diferencial do motor 5 hp, 460 V.
Fig. C. 11: Medição e cálculo do ângulo fase da impedância de modo diferencial do motor 5 hp, 460 V.
Para verificar a modelagem proposta do motor, dois motores de indução foram
selecionados aleatoriamente e testados usando um analisador de frequência. Os resultados da
medição com um medidor de LCR e dos cálculos da modelagem proposta foram comparados

142
nas Figs. C.10 e C.11, no teste em que o escorregamento do motor era igual a 1. Nestas
figuras, a resposta em frequência da amplitude e do ângulo de fase da impedância é mostrada
na faixa de frequência entre 100 Hz e 10 MHz, para o rotor bloqueado, sem carga e com carga
completa, respectivamente, sendo o escorregamento do motor com carga completa igual a
0.027. Como observado, a velocidade do motor ou o nível de carga do motor não tem impacto
significativo sobre a impedância do motor sobre a faixa de média e alta frequência. A curva
do modelo proposto corresponde à curva de alta frequência no modo diferencial e ao primeiro
e segundo pontos de ressonância exatamente. O circuito T-equivalente mostra que a
impedância do motor é correta somente até a frequência de ressonância fr, isto é esperado
devido à falta de capacitores ressonantes. Uma questão fundamental é que a modelagem tem a
capacidade de combinar as funções de transferência do modo diferencial e comum para todas
as frequências da modelagem, sabendo-se que existem os efeitos de proximidade e pelicular
em função da frequência. Um teste com o rotor e sem o rotor foi executado para certificar que
o circuito do rotor de baixa frequência não alteraria a função de transferência no modo
diferencial da modelagem proposta em alta frequência. A Fig. C.12 mostra que a impedância
série R-L no modo diferencial é reduzida, abaixo da frequência de ressonância, devido à
remoção da indutância Llr e da resistência (Rr/S) do rotor que representa a variação de carga
do motor.
Fig. C. 12: Medição da impedância de modo diferencial do motor 1 hp, 460 V versus frequência.
A análise da interferência eletromagnética (EMI) e da sobre tensão da onda refletida se
preocupou com as frequências correlacionadas ao tempo de subida do pulso de tensão
definido por (1/π*tr) para os tempos de subida típicos do conversor de frequência entre 20 ηs e
2.0 μs, resultando numa faixa de frequência de 150 kHz a 16 MHz. A Fig. C.12 mostrou que a

143
impedância no modo diferencial é estritamente ditada pelos parâmetros do estator, de forma
que o circuito do rotor de baixa frequência pode ser deixado como está na modelagem
proposta sem apresentar erro, assim como mostraram as Figs. C.10 e C.11 sob as condições
de carga plena e em vazio.
Os procedimentos para a obtenção dos parâmetros do modelo proposto são os
seguintes:
11. Resistência do estator Rs: para garantir que a frequência fundamental de 50 Hz, 60 Hz
ou 400 Hz do fluxo da corrente no modelo resulte na correta saída de potência e torque
fundamental, o valor da resistência Rs deve ser igual à do enrolamento quente ou frio
fornecido pelo fabricante. As perdas do fio de cobre na frequência harmônica,
frequência da portadora e frequência das emissões de onda refletida devem ser
contabilizadas no termo de amortecimento Rws;
12. Resistência de perda do núcleo Rcore: a resistência Rcore e a indutância Lm parecem ter
um efeito sobre o arredondamento da forma de onda refletida e da forma de onda das
emissões eletromagnéticas. Os valores padronizados dos fabricantes para 460 V, 60
Hz e Rcore versus potência da máquina, em hp, é dado pela equação (C.3).
(C. 3)
A importância da resistência Rcore é maior para as potências elevadas, onde seu efeito
aproxima os valores da impedância de surto do cabo de 50 Ω a 120 Ω ao valor do
coeficiente de reflexão no terminal;
13. Resistência Rr, indutância Llr e escorregamento S do rotor: neste caso, são utilizados
os valores fornecidos pelo fabricante do modelo T-equivalente. Existe o efeito
pelicular da indutância e o efeito pelicular de profundidade da barra na resistência do
rotor, porém estas variações não alteram apreciavelmente a forma da curva da
impedância de modo diferencial versus frequência;
14. Indutância de magnetização Lm: é utilizado o valor na frequência fundamental do
modelo da norma (IEEE STD 112, 2004). O efeito da indutância de magnetização é
desprezível desde que ela esteja em paralelo com a indutância de dispersão do rotor
para ajudar a definir as frequências de ressonância;
15. Indutância Lls de dispersão do estator: é empregado o valor na freqüência fundamental
do modelo da norma (IEEE STD 112, 2004). No entanto, a redução da indutância Lls

144
na frequência harmônica e da portadora é reconhecida como um efeito secundário. Isto
pode ser levado em conta por não se obter uma concordância perfeita na função de
transferência no modo diferencial em toda a faixa de frequências;
16. Indutância ηLls de dispersão das primeiras espiras do estator: este termo é um dos
parâmetros críticos na definição da impedância no modo diferencial com a onda
refletida de tensão, prevendo o ponto de anti-ressonância da Fig. C.4 e a configuração
correta da corrente de dispersão de interferência eletromagnética para terra no circuito
de modo comum. O termo ηLls é usado para explicar o fato de que apenas uma fração
da indutância total de dispersão do estator é atribuída para alta frequência, em torno de
5 MHz no ponto de anti-ressonância e especificamente nas quatro primeiras espiras da
primeira ranhura na entrada do enrolamento, sendo obtido pela equação (C.4) e
dependente dos dados do enrolamento fornecidos pelo fabricante do motor.
(C. 4)
Se o valor de ηLls é muito alto, então tal indutância isolará o termo Cwf-effective e a
corrente de pico para terra, tornando a forma de onda da reflexão incorreta na
simulação de modo comum;
17. Capacitância total do estator para a carcaça Cwf-total: Uma representação física da
capacitância Cwf-total do enrolamento do estator para a carcaça aterrada é mostrado na
Fig. C.13.
Fig. C. 13: (a) Capacitância Cwf-total; (b) Capacitância Cwf-slot.

145
Para frequências maiores que a primeira frequência ressonante fr1 na ranhura do
estator, a capacitância Cwf-slot por ranhura do enrolamento para a carcaça desempenha
um papel importante, descrevendo o comportamento no modo diferencial e comum do
motor em altas frequências. A capacitância Cwf-total é calculada a partir da geometria do
núcleo do estator, analisando-se a capacitância da ranhura para a carcaça aterrada e
multiplicando-se pelo número de ranhuras do estator Ns. Cada ranhura do estator pode
ser considerada, aproximadamente, como um condutor de forma retangular com o
comprimento Lfe igual ao do núcleo do estator, largura média Wslot e profundidade
média dslot.
Considerando que todos os lados deste condutor estejam num mesmo potencial, o
valor da capacitância existente entre os condutores do enrolamento do estator em cada
ranhura pode ser obtido através de (C.5).
(C. 5)
Onde, Lslot é o perímetro da ranhura do estator, podendo ser aproximado como (Lslot ≅
2*dslot + 1.5*Wslot), δ1 e δ2 são as espessuras do papel isolante da ranhura e o
isolamento do fio, respectivamente, δ1 (0.38 < δ1 < 0.63 mm) e δ2 (0.02 < δ2 < 0.05
mm), ver a Fig. 4.24(b), com as permissividades relativas εr1 e εr2, respectivamente,
(3.0 < εr1 < 3.2) e (3.5 < εr2 < 4.0). Como pode ser visto na Fig. C.13(b), o papel
isolante próximo à abertura da ranhura é o dobro ao longo de uma parte da parede do
estator. Portanto, uma correção do fator de espessura é definida como kt e considera a
espessura extra do isolamento (1.0 < kt < 1.5). Um pequeno espaço de ar aleatório
entre o papel isolante da ranhura e a carcaça é definido por δ3 (0.02 < δ3 < 0.3 mm),
exerce um papel importante no resultado final das capacitâncias Cwf-slot e Cwf-total,
podendo alterá-las em até duas vezes (2:1) ao considerar este espaço de ar linear,
porém, os cálculos são mais precisos. Para um motor com um número de ranhuras do
estator Ns, a capacitância Cwf-total pode ser obtida por (C.6).
(C. 6)
18. Capacitância Cwf-slot e Cwf-effective do estator para a carcaça: os resultados das medições
de variação da capacitância Cwf, em resposta de freqüência, para uma fase condutora e
três fases condutoras curto-circuitadas do enrolamento do estator em relação à carcaça

146
aterrada são mostrados na Fig. C.14. O valor da capacitância de uma fase condutora é
muito menor na faixa de 100 kHz até 16 MHz, se comparado com o valor em baixa
frequência (300 Hz a 5 kHz). Isso é explicado usando o modelo de parâmetros
distribuídos da Fig. C.2. Nas frequências baixas todo o somatório de várias seções
contribui para a capacitância Cwf, mas em alta frequência apenas a capacitância Cwf-
effective é funcional e o restante da capacitância é isolado.
Fig. C. 14: Resultados da capacitância do enrolamento do estator para a carcaça motor 5 hp.
O valor de 300 ρF para (fr > 100 kHz) concorda com o valor calculado da capacitância
Cwf-effective para uma ranhura conforme a Tabela C.1, do motor de 5 hp e verifica a
teoria de uma única ranhura para a resposta no modo diferencial em alta frequência.
Tabela C. 1: Especificações de projeto dos motores de indução de 5, 20 e 100 hp.
Potência do motor 5 hp 20 hp 100 hp
Conexão do enrolamento do estator Estrela (Y) Delta (∆) Delta (∆)
Número de circuitos paralelos 1.0 1.0 2.0
Comprimento da pilha (mm) 114.3 158.8 196.9
Número de ranhuras do estator 36 48 60
Largura da ranhura do estator (mm) 6.959 7.366 8.763
Profundidade da ranhura do estator (mm) 18.669 26.924 35.8141
As medições dos três condutores no modo comum da Fig. C.14 para (fr > 100 kHz) é
três vezes o valor do condutor único. Isso ocorreu porque a primeira seção distribuída
de todos os três condutores são apenas as seções contribuindo em paralelo, de forma

147
que o valor dos três condutores é três vezes o valor de um único condutor. As
medições de um único condutor e de três condutores em baixa frequência não são três
vezes, mas têm o mesmo valor. Isso ocorre porque o valor do condutor único pode ir
através do neutro do motor e ganhar a capacitância do estator para a carcaça das outras
duas fases. Na faixa de 10 kHz até 100 kHz o valor dos três condutores está ganhando
mais seções distribuídas no fim do terminal e o seu valor é maior do que a medição de
um único condutor. Para a modelagem proposta, somente a título de exemplo, a Tabela
C. 2 fornece os parâmetros de por fase para os motores de 5, 20 e 100 hp, em 60 Hz.
Tabela C. 2: Parâmetros por fase com a frequência de alimentação de 60 Hz para motores de 5, 20 e 100 hp.
Potência do motor 5 hp 20 hp 100 hp
Rs (Ω) 1.410 0.267 0.090
Rr (Ω) 1.280 0.248 0.056
Lls (mH) 11.350 2.910 1.695
Llr (mH) 15.040 4.290 2.217
Lm (mH) 319.0 77.3 48.1
Rcore (Ω) 2568.0 990.0 862.0
Cwf-slot (ηF) 0.213 0.409 0.703
Cwf-effective (ηF) 0.213 0.818 2.80
Cwf-total (ηF) 7.668 19.63 42.1
Cwf-0 (ηF) 2.343 5.726 11.26
Cws (ηF) 0.852 1.63 5.60
Outro importante fator de geometria da máquina é a conexão do enrolamento do
estator, que se estiver ligado em triângulo, tem o dobro da capacitância Cwf-slot, em
comparação com enrolamento ligado em estrela, Fig. C.15. O número de circuitos
paralelos também pode alterar o valor da capacitância Cwf-effective.
Fig. C. 15: Enrolamento ligado em delta tem o dobro de capacitância efetiva.
19. Capacitância Cwf-0: a capacitância Cwf-0 é o restante da capacitância de modo comum
do estator para terra concentrada no ponto neutro da conexão estrela do enrolamento.

148
Deve ser notado que o valor da capacitância de sequência zero é um terço do valor da
capacitância no modo comum medida, sendo obtida por (C.7).
(C. 7)
20. Capacitância Cws do enrolamento do estator de espira para espira: para a determinação
deste parâmetro utiliza-se uma forma heurística baseada em vários testes realizados
anteriormente em mais de 50 motores diferentes, observando-se que a segunda
frequência de ressonância é aproximadamente o dobro ou menos do valor da primeira
frequência de ressonância, então a capacitância de dispersão entre espiras pode ser
obtida como uma função da capacitância Cwf-effective, dada por (C.8).
(C. 8)
21. Resistência Rws de amortecimento do enrolamento do estator de espira para espira: este
termo explica o efeito de proximidade e o efeito pelicular no fio e as perdas no núcleo
em alta frequência. A resistência Rws é o elemento de amortecimento do circuito
ressonante paralelo. No primeiro pico de ressonância da Fig. C.4, a impedância no
modo diferencial medida é igual a 3/2. Ela é fundamentada na resistência Rcore e não
tem um grande impacto sobre a resistência de amortecimento necessária. Os fatores do
efeito de proximidade e pelicular do fio, na frequência de ressonância, multiplicados
pelo valor de Rdc resulta em um valor em série que pode ser convertido para um valor
Rws em paralelo;
22. Resistência de amortecimento inicial μRs do estator para terra: esta componente é a
resistência AC da parte fracionária da resistência Rs do estator devido à segmentação
de ηLls, já descrita. Em 60 Hz μRs é igual a [Rs* (4 espiras/Nº total de espiras)] e o
fator de multiplicação entre 10 e 20 é usado para o efeito de proximidade e pelicular,
abrangendo também a resistividade da laminação do aço das ranhuras, onde o fio terra
do motor está conectado à caixa de conexão. O termo μRs afeta a corrente de pico no
modo comum, bem como o amortecimento das oscilações de tais correntes para terra.
A Fig. C.16 mostra o modelo universal do motor de indução trifásico com a adição do
modelo de eixo e do rolamento, ligado ao enrolamento trifásico (MIRAFZAL, 2006, p.
423-433).

149
Fig. C. 16: Modelagem universal do motor de indução trifásico de 10 Hz até 10 MHz.

Apêndice D – Ilustrações Gerais
Neste apêndice são apresentadas as fotos dos equipamentos e instrumentos utilizados
nos testes experimentais. Começando com a foto mostrada na Fig. D.1 que ilustra a ponta de
prova para medição de alta tensão diferencial; na Fig. D.2, o amplificador da ponta de prova
para medição das correntes; na Fig. D.3, o amplificador da ponta de prova para medição das
correntes; na Fig. D.4, o osciloscópio digital utilizado para obtenção das formas de onda; na
Fig. D.5, o conversor de freqüência utilizado nos testes experimentais; na Fig. D.6, o
rolamento 6205 ZZ, utilizado na ponta DE do eixo; na Fig. D.7, o rolamento 6204 ZZ,
aplicado na ponta NDE do eixo.
Fig. D. 1: Foto da ponta de prova para medição de alta tensão diferencial.

151
Fig. D. 2: Ponta de prova para a medição das correntes, abraçando o condutor de desvio.
Fig. D. 3: O amplificador da ponta de prova para medição das correntes com a terminação de 50 Ω, 0.5 W.

152
Fig. D. 4: Foto do osciloscópio digital utilizado para obtenção das formas de onda.
Fig. D. 5: Foto do conversor de frequência utilizado nos testes experimentais.

153
Fig. D. 6: foto do rolamento 6205 ZZ, utilizado na ponta DE do eixo.
Fig. D. 7: Foto do rolamento 6204 ZZ, aplicado na ponta NDE do eixo.