diseÑo e instalaciÓn de guÍa virtual para...
TRANSCRIPT

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
DISEÑO E INSTALACIÓN DE GUÍA VIRTUAL PARA DÉBILES VISUALES
Y PÚBLICO EN GENERAL
T E S I S
QUE PARA OBTENER EL TÍTULO DE INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
P R E S E N T A
IKER SANTIESTEBAN JIMÉNEZ
ASESORES: M. EN C. MARTÍN ENRIQUEZ SOBERANES M. EN C. FRANCISCO J. VILLANUEVA MAGAÑA
MÉXICO D.F. 2008


Muchas veces en mi vida imaginé el momento de tener que agradecer a todos y cada uno de los actores trascendentales en mi vida.
Hoy, me he dado cuenta que muchos a los cuales hubiese querido agradecer quizás no puedan saber qué tanto aprecio su ayuda, esfuerzo y sobre todo cariño, espero que en cualquier momento de sus vidas y de la mía podamos compartir este logro que tanto me ha costado y que sin tanta ayuda no hubiese podido lograr.
Afortunadamente, existe una fuerza fundamental que todo lo puede y se que me lee, me escucha, GRACIAS ¡DIOS!, espero me permitas seguir creciendo, aprendiendo y concretando sueños y metas.
Al mismo tiempo, DIOS, te doy gracias por darme a dos seres incomparables, únicos, que me han llenado de vida, cariño, así como de regaños necesarios y que poco a poco he intentado comprender el papel que ejercen en mi vida, concluyendo en que sin ellos nada sería.
MI GER Y MI CHAPARRITA, o MI CHAPARRITA Y MI GER,
¡GRACIAS! Sin importar el orden, únicamente la existencia, ¡GRACIAS INFINITAS! Y al igual que a DIOS, ahora me toca también agradecerles a ustedes mis
PADRES, por haberme dado una familia hermosa, llena de amor, de mucho cariño y de hermandad, pues bien saben que tampoco podría vivir sin mis hermanos.
SUNY Y PPIN
Quiénes mejor que ellos dos para haberme acompañado toda mi vida y ser parte fundamental de ella; la mezcla perfecta de amor, educación, protección y amistad que un ser como Yo, y saben a lo que me refiero, necesito y necesitará siempre para ser feliz, ¡GRACIAS¡
A toda mi familia, GRACIAS de verdad GRACIAS. A PHI, gracias por mantenerme, espero sigamos creciendo. A mis asesores de tesis, en especial al M. en C. Martín Enríquez Soberanes,
quien me ha apoyado “muchísimo” y que sin él no hubiese podido sincronizar los horarios de trabajo y elaboración de Tesis, Profe, ¡lento pero seguro!, muchas ¡GRACIAS!
Al Ing. Javier Lancón Bretón , que se ha adelantado pero que dejó en mí lo necesario para poder salir adelante en la carrera. En donde quiera que se encuentre ¡GRACIAS!, sigo guardando las hojas de los primeros circuitos que vi y resolví en mi vida.
Y por último GRACIAS A LA MÚSICA, AL AMOR Y A LA VIDA, son mis fuentes de inspiración y es ahí donde encuentro fuerzas para seguir adelante.
A todos GRACIAS.
Su flaco, güerejo, feo, brouch, más conocido como:
Iker Santiesteban Jiménez.

1
DISEÑO E INSTALACIÓN DEL MÓDULO
“GUIA VIRTUAL PARA DÉBILES VISUALES Y PÚBLICO EN GENERAL”

2
OBJETIVO GENERAL: Diseñar un dispositivo económico y eficiente que permita funcionar como un guía
virtual en el recorrido del Museo de la Biodiversidad en los fuertes de Loreto y Guadalupe, en el estado de Puebla y así brindar un mejor acondicionamiento a las necesidades de personas con debilidad visual y público en general.
OBJETIVOS PARTICULARES: 1. La guía virtual debe funcionar de forma automatizada. 2. Implementar sensores de presencia. 3. Programar detección de secuencia con dos entradas y una salida; cada entrada
corresponde a un módulo de dos sensores de presencia. El programa debe detectar cuál de los dos sensores ha sido activado en primera instancia y así dar la orden de reproducir o no reproducir mensajes.
4. El programa de detección de secuencia debe funcionar de manera simultánea en 12 módulos, de tal suerte que existirán 24 entradas y 12 salidas de forma física.
5. Debido al número de entradas y salidas y a las características del microcontrolador 16F877A es necesario habilitar una etapa para multiplexar las entradas de éste.
6. Habilitar el dispositivo ISD4003 encargado de grabar y reproducir mensajes. 7. Reproducir mensajes al existir ingresos aleatorios a cualquiera de los 12
módulos. 8. Elaborar un programa que permita controlar la intensidad de volumen en cada
uno de los 12 módulos existentes; en este mismo apartado, debe existir la opción de activar o desactivar la operación de cualquiera de los 12 canales.
9. Estructurar un programa que permita la modificación de las características de cada uno de los módulos, de tal suerte que la información deberá desplegarse en un display (LCD) de 4 X 20 segmentos. Tal programa deberá contemplar 4 entradas, 2 para acceder y salir del menú y 2 para dar modificar los valores.
10. Estudio costo beneficio y elección adecuada de los dispositivos a emplear para la reducción de costos.

3
PLANTEAMIENTO DEL PROBLEMA: Los dispositivos comercializados para reproducción de mensajes como por ejemplo los
vistos en bancos encargados de controlar el tráfico de los clientes a las cajas, pueden ser una solución a lo deseado por el CONSEJO CÍVICO CULTURAL CINCO DE MAYO (CCCCM). Sin embargo, el problema surge en que el costo por módulo es bastante elevado; un costo aproximadamente de $30,000.00 (treinta mil pesos 00/100 M.N.) por módulo y si la necesidad es de 12 módulos incrementando los costos del proyecto. Aunado a esto, surge el cuestionamiento de la eficiencia del producto y de la capacidad de adaptación a la aplicación requerida como lo es la del museo.
Nosotros nos enfrentamos a la siguiente problemática: 1. Debemos controlar 12 módulos de forma independiente a través de un módulo
central o cerebro, con la finalidad de que todo se concentre en un solo dispositivo y una persona, a través de una sola cabina, haga uso del dispositivo y pueda configurar el canal deseado sin tener que desplazarse a cada una de las localidades a configurar.
2. El volumen de cada canal se deberá configurar con base a la cantidad de visitantes existentes en el recinto, de ahí que el dispositivo debe poderse configurar a placer del operador.
3. En caso de no tener una lógica de la secuencia de reproducción, los mensajes podrían reproducirse a la entrada y a la salida de las personas, lo cual sería poco operativo pues se causaría confusión a los visitantes y más a las personas con discapacidad visual.
4. El dispositivo debe ser configurable por un operador, pues de no ser así, cada que se requiriera hacer una modificación se tendría que recargar el programa, lo cual implica aumento en los costos de mantenimiento del dispositivo.
JUSTIFICACIÓN: Se ha observado que los dispositivos comerciales brindan únicamente soluciones
parciales y las cotizaciones demuestran que una adaptación de estos, a las necesidades planteadas, representa una elevación considerable en los costos del proyecto del Museo de la Biodiversidad.
Es conveniente invertir en un dispositivo que como principales características resuelva todas las necesidades del CCCCM y aunado a esto, represente una fuerte atracción turística dado el nivel de tecnología empleado, por lo cual se espera una mayor captación de gente y recuperación de la inversión a plazo más corto.

4
1. INTRODUCCIÓN .................................................................................................................................. 6 2. MICROCONTROLADORES.............................................................................................................. 12
2.1 REGISTROS.......................................................................................................................................... 16 2.1.1 REGISTRO STATUS ...................................................................................................................... 17 2.1.2 REGISTRO INTCON ..................................................................................................................... 17 2.1.3 REGISTRO PIE1............................................................................................................................ 18 2.1.4 REGISTRO PIR1............................................................................................................................ 18 2.1.5 REGISTRO SSPSTAT..................................................................................................................... 18 2.1.6 REGISTRO SSPCON ..................................................................................................................... 18 2.1.7 REGISTRO ADCON1 .................................................................................................................... 19
2.2 CONFIGURACIÓN DE PUERTOS...................................................................................................... 19 2.3 MODO SPI............................................................................................................................................. 20
2.3.1 ACTIVACIÓN DE LOS PUERTOS DE ENTRADA/SALIDA EN EL SPI. ..................................... 22 2.3.2 MODO MAESTRO......................................................................................................................... 23 2.3.3 MODO ESCLAVO ......................................................................................................................... 24 2.3.4 SINCRONIZACIÓN DE SELECCIÓN DE ESCLAVO................................................................... 24
2.4 OPERACIÓN DEL MSSP I2C ............................................................................................................... 24 2.4.1 MODO ESCLAVO ......................................................................................................................... 25 2.4.2 DIRECCIONAMIENTO................................................................................................................. 26 2.4.3 RECEPCIÓN ESCLAVO................................................................................................................ 27 2.4.4 TRANSMISIÓN ESCLAVO ............................................................................................................ 27 2.4.5 SOPORTE DE DIRECCIÓN DE LLAMADA GENERAL .............................................................. 28 2.4.6 MODO MAESTRO......................................................................................................................... 28 2.4.7 MODO MULTIMAESTRO............................................................................................................. 29 2.4.8 SOPORTE DEL MODO MAESTRO PARA EL I2C........................................................................ 29 2.4.9 OPERACIÓN DEL MODO MAESTRO EN EL I2C ....................................................................... 29
2.5 CONVERTIDOR ANALÓGICO DIGITAL A/D. ................................................................................. 31 2.5.1 REQUERIMIENTOS PARA LA ADQUISICIÓN EN EL A/D. ....................................................... 32 2.5.2 SELECCIÓN DEL RELOJ DE CONVERSIÓN DEL A/D.............................................................. 33 2.5.3 CONFIGURACIÓN DE LAS TERMINALES ANALÓGICAS DEL PUERTO................................ 34 2.5.4 CONVERSIÓN A/D........................................................................................................................ 34
3. DISPOSITIVOS.................................................................................................................................... 35 3.1 MULTIPLEXORES............................................................................................................................... 35 3.2 RETENEDORES “LATCH” ................................................................................................................. 36 3.3 ISD......................................................................................................................................................... 38 3.4 FILTROS ............................................................................................................................................... 43 3.5 ATENUADOR DE AUDIO LM 1971 ................................................................................................... 51
4. CABLEADO ESTRUCTURADO Y TRANSMISIÓN DE DATOS. ................................................ 53 4. 1 TRANSMISIÓN DE DATOS ............................................................................................................... 53 4. 2 TRANSMISIÓN DE SONIDO ............................................................................................................. 54
5. DISEÑO DEL PROYECTO ................................................................................................................ 58 5.1 SENSORES Y ACTUADORES ............................................................................................................ 58
5.1.1 DETECTOR DE PRESENCIA ....................................................................................................... 58 5.1.2 ACTUADORES. ............................................................................................................................. 62
5.2 TARJETA DE CONTROL .................................................................................................................... 63 5.2.1 DETECCIÓN DE SECUENCIA..................................................................................................... 63 5.2.2 PROCESAMIENTO Y ACTIVACIÓN DE VARIABLES................................................................. 65 5.2.3 RETENEDOR LATCH PARA CONTROL DE EVENTOS. ............................................................ 69

5
5.2.4 ENVÍO DE EVENTOS MEDIANTE EL MÓDULO SSP................................................................ 72 5.3 LCD ....................................................................................................................................................... 73 5.4 TARJETA DE REPRODUCCIÓN DE CUÑAS. ................................................................................... 76
5.4.1 ISD ................................................................................................................................................. 76 5.5 ATENUADOR LM 1971 ....................................................................................................................... 78
6. IMPLEMENTACIÓN DEL PROYECTO ......................................................................................... 80 6.1 PROTEL DXP........................................................................................................................................ 80 6.2 TARJETAS............................................................................................................................................ 82
6.2.1 TARJETA DE REPRODUCCIÓN Y GRABACIÓN DE MENSAJES ............................................. 82 6.2.2 TARJETA DE CONTROL .............................................................................................................. 83 6.2.3 TARJETA DE REPRODUCCIÓN DE MENSAJES ....................................................................... 85
6.3 GABINETE ........................................................................................................................................... 87 6.3.1 ESQUEMÁTICOS.......................................................................................................................... 87
6.4 BITÁCORA DE INSTALACIÓN ......................................................................................................... 92 6.4.1 VERIFICACIÓN DE INSTALACIÓN DE DUCTOS...................................................................... 92 6.4.2 VERIFICACIÓN DE INSTALACIÓN DE CASETAS ..................................................................... 92 6.4.3 CABLEADO ................................................................................................................................... 93 6.4.3.1 CONFIGURACIÓN DE CABLE................................................................................................. 94 6.4.4 PANEL DE PATCHEO .................................................................................................................. 94 6.4.4.1 TRANSMISIÓN DE DATOS........................................................................................................ 95 6.4.4.2 TRANSMISIÓN DE AUDIO........................................................................................................ 95 6.4.5 INSTALACIÓN DE SENSORES Y ALTAVOCES........................................................................... 96 6.4.6 CONEXIÓN DEL MÓDULO DE LOS SENTIDOS ....................................................................... 96 6.4.6.1 PRUEBAS DE FUNCIONAMIENTO ......................................................................................... 97 6.4.6.2 DIAGRAMA ARQUITECTÓNICO DE INSTALACIÓN.............................................................. 98
7. ESTUDIO COSTO BENEFICIO .......................................................................................................100 8. CONCLUSIONES ...............................................................................................................................102 9. BIBLIOGRAFÍA .................................................................................................................................104 10. GLOSARIO DE FIGURAS............................................................................................................105 11. GLOSARIO DE TABLAS..............................................................................................................106

6
1. INTRODUCCIÓN Las tendencias mundiales en la arquitectura de recintos ha evolucionado a pasos
agigantados, cada vez es más notoria la necesidad de aplicaciones tecnológicas que brinden mejores condiciones de vida y mejor acondicionamiento a las necesidades de las personas. Tal es el caso de las nuevas leyes de construcción que han entrado en vigor en España promovidas por la federación española de municipios y provincias, por citar un ejemplo, en la que obligan a las nuevas construcciones poseer elementos de ahorro de energía, tratamiento de aguas residuales, aplicaciones en beneficio de personas con discapacidades y cuestiones relacionadas con las mejoras en los servicios brindados en recintos.
En esta ocasión, el Consejo Cívico Cultural Cinco de Mayo preocupado por acceder a la
vanguardia mundial y así mismo brindar servicios a discapacitados, han elaborado un proyecto dotado de características tecnológicas innovadoras en pro de un sector que debe ser procurado y atendido como lo es el de los discapacitados.
Dentro del todo los proyectos emprendidos en los fuertes de Loreto y Guadalupe, existe
uno dedicado al 100% a los débiles visuales y lleva por nombre MUSEO DE LA BIODIVERSIDAD, cuya finalidad es dar a los invidentes un área de recreación en la que todos sus sentidos son expuestos a olores, sonidos, texturas y sabores con características especiales, así como una arquitectura agradable a la vista del público en general.
Como en todo proyecto es esencial pensar en todos los sectores del universo de gente a
la cual este se destina, provocando, así, aplicación de código braile, nomenclaturas didácticas y, una parte importante e innovadora como lo es, una dispositivo dedicado a la detección de los visitantes que ingresen a cualquiera de las áreas del museo y brinde una explicación de lo que se muestra en algún área determinada y funja como una guía a través del recorrido.
Es así como el CCCCM plantea su necesidad y en pláticas sostenidas con dicha
Asociación Civil a cargo de la Lic. Lorena Zedillo Ponce de León, se afinaron detalles técnicos y se ha concluido con las cualidades de lo que ahora nombraremos Guía virtual (GV)
La principal cualidad del dispositivo es detectar la entrada y diferenciarla de la salida de
los visitantes, por lo que se propone el empleo de sensores de presencia con tecnología infrarroja. Se han elegido dos de ellos, con la finalidad de poder saber cuál de ellos ha sido detectado en primer tiempo y así definir si las personas entran o salen.
Una segunda cualidad del dispositivo es la reproducción de los mensajes de forma
simultánea en cualquiera de las áreas propuestas por el CCCCM y que posean una intensidad variable dependiendo del tráfico de personas, así como una potencia que permita tener una correcta apreciación de los mensajes reproducidos, de tal suerte que se eligen altavoces de 4 ohms con una potencia de salida de 20 W RMS.

7
Ahora bien, conocemos de forma general lo que se requiriere y daremos paso a los requerimientos tecnológicos que permitirán el desarrollo y éxito del proyecto.
1. Se requiere un dispositivo que procese las señales emitidas por los sensores y de
lógica a su secuencia de activación, dictaminando las tareas a ejecutar, de ahí se ha elegido utilizar la tecnología brindada por la empresa MICROCHIP en su dispositivo de la serie 16F877A; microcontrolador que se consigue en el mercado con facilidad y posee características apreciables para el proyecto, las cuáles serán mostradas y descritas a lo largo del desarrollo de ésta literatura.
2. Como se mencionó, la reproducción de los mensajes es fundamental en el
proyecto y se ha encontrado un dispositivo muy noble en cuanto a su uso y que brinda la solución completa, pues también a través de éste se pueden elaborar la grabación de mensajes. El ISD4003, permite la grabación de mensajes de hasta 3 minutos, así como otras características que se detallaran más adelante
. 3. Dadas las necesidades de intensidad de audio, se anexará al proyecto un
amplificador de audio muy comercial y de bajo costo, el LM1875T. 4. Una etapa interesante es la del control de volumen y características de volumen.
Se tiene conocimiento del uso de atenuadores de sonido, en este proyecto será la primera vez que experimentemos con él, se trata del LM1971, comercial y de bajo costo.
5. Para efectos de desplegar la información en el LCD y poder controlar las
opciones de los canales, se anexará otro microcontrolador 16F877A.
6. Existe un detalle importante y repercute directamente en los costos de producción, debido a que se tienen 24 entradas y 12 salidas, bien puede utilizarse un microcontrolador más, sin embargo, resulta más eficiente y económico anexar una etapa para multiplexar las entradas del dispositivo empleando el CD4067BE.
7. Dada la experiencia, cuando se trabaja con múltiples entradas y salidas, es
necesario anexar un retenedor de datos, pues como bien sabemos todo ocurre a una velocidad impresionante y un dispositivo LATCH, 74HC259, nos puede brindar la certeza de que todos los eventos serán tomados en cuenta, pues recopilará los eventos sucedidos, los ordenará por de forma LIFO(last input, last output) y cada que el microcontrolador pueda recibir los datos, los requerirá directamente al LATCH y podremos tener control de todos los eventos de forma cronológica.
8. Una etapa dentro de este proyecto, que en realidad no es tema de esta tesis, es la
maquilación de un gabinete adaptado a las tarjetas, al LCD, al sistema de ventilación y alimentación, de lo cual posteriormente se anexarán planos y especificaciones.

8
9. Como punto final y de gran trascendencia, tenemos lo referente al cableado estructurado, pues una correcta transmisión y recepción de datos dependerá directamente de la calidad de cable empleado y cálculos adecuados de longitudes físicas con respecto a la longitud de onda.
De esta forma, en resumen, podemos dar solución a las siguientes necesidades:
1. 12 Canales independientes con 20 W RMS de salida. 2. Detección de dirección de recorrido por canal. 3. Reproducción de Cuñas. 4. Desplegado de opciones en LCD de 4X24. 5. Grabación de Cuñas. 6. Diseño de Gabinete. 7. Cableado estructurado para una superficie de 50x30mts.
Por cuestiones ergonómicas, la etapa de adquisición de datos y procesamiento será diseñada en una misma tarjeta que se denominará TARJETA DE CONTROL. La etapa de reproducción, control de volumen y potencia se manufacturará por separado, teniendo como resultado una TARJETA DE GRABACIÓN y una TARJETA DE REPRODUCCIÓN. La tarjeta de grabación no se incluye en la venta del dispositivo, es para uso personal del grupo de trabajo.
DESCRIPCIÓN:
• TARJETA DE CONTROL. La tarjeta de control será la encargada de asignar los valores iniciales de volumen para
cada uno de los canales, desplegar las opciones en el LCD, detectar el correcto recorrido a través del recinto y ordenar la reproducción de la(s) cuña(s) correspondiente(s).
Al energizar el sistema, el dispositivo desplegará en el LCD la información del
proveedor y posteriormente el menú de opciones para modificar el volumen y la activación o desactivación de uno o más de los canales. Las condiciones iniciales proveen un volumen de 20 dB y los 12 canales activados.
Para la detección de dirección de recorrido se han empleado dos sensores infrarrojos
con salida a relevador NA que se alimentan a 12 V CD. Cada par de sensores es recibido en la tarjeta de control mediante conectores RJ11 que a su vez han sido conectados a 2 multiplexores (CD4067BE) que con la ayuda de dos dispositivos retenedores LATCH (74HC259), enviarán y recibirán información del PIC 16F877A que procesará y ordenará la reproducción de los canales que hayan sido activados.

9
• TARJETA DE REPRODUCCIÓN DE CUÑAS. La tarjeta de reproducción de cuñas posee los dispositivos encargados de controlar el
volumen (LM1971), la potencia de la reproducción (LM1875T) y los dispositivos encargados del almacenamiento de las cuñas, que, como es de suponerse, han sido previamente grabadas (ISD4003-04MP).
La tarjeta de control enviará bits de activación al ISD4003-04MP que a su vez permitirá
la salida de la señal acústica al LM 741 para ser amplificada al nivel adecuado de recepción del LM1971, que en conjunto con la configuración inicial enviada por la tarjeta de control, establecerá el volumen o silencio total de la señal acústica y, así, enviar al LM1875T donde se amplificará a 20 W RMS y será transmitida al altavoz.
• TARJETA DE GRABACIÓN DE CUÑAS.
Esta tarjeta es independiente de la tarjeta de control y reproducción de cuñas, ya que su
labor es previa a todo el funcionamiento del dispositivo, pues es donde será establecido el contenido de la información de cada canal.
Representa un parte trascendental en el proyecto pues de ella depende la correcta
grabación y pureza de las cuñas El diseño de la tarjeta permite la elección de la fuente acústica, ya sea mediante micrófono o mediante el puerto de salida de audio de la PC, es decir, el diseño de la tarjeta de grabación permitirá capturar señal analógica o digital.
• CABLEADO ESTRUCTURADO. Gran parte del funcionamiento adecuado del dispositivo dependerá de la correcta
transmisión y recepción de las señales emitidas tanto por los sensores de presencia como por el módulo central de control que contiene la tarjeta de control y la tarjeta de reproducción de cuñas, por lo que se deben de tomar en cuenta todos los estándares de cableado para evitar pérdidas en la señal o envío de información errónea durante el funcionamiento.
De manera resumida, tenemos el siguiente cuadro:
• Sensores y Actuadores.
• Tarjeta de Control.
a) Detección de Secuencia.
1. Recepción de Señal enviada por el Relevador interno del Sensor. 2. Procesamiento y activación de variables. 3. Comunicación Serial Síncrona SSP para controlar la tarjeta de reproducción. 4. Control del envío de bits de activación mediante los retenedores LATCH.
10
b) Desplegado en LCD.
1. Datos del Fabricante. 2. Datos del Consejo Cívico Cultural Cinco de Mayo. 3. Opciones de Volumen, Activación y Desactivación de Canales.
c) Selección de opciones de canal.
1. Procesamiento de los valores elegidos por el usuario. 2. Comunicación SSP para controlar el atenuador LM1971.
• Tarjeta de Reproducción de Cuñas.
a) ISD
1. Envió de los mensajes contenidos al LM741 tras haber recibido la trama
adecuada de activación. 2. Desactivación de los mensajes por mandato de la tarjeta de control.
b) LM741
1. Recepción de señal. 2. Amplificación. 3. Envío a LM1971
c) LM1971
1. Recepción de los valores determinados por el usuario. 2. Recepción de la señal emitida por el LM741. 3. Envió de señal atenuada a LM1875.
d) LM1875
1. Amplificación a 20W. 2. Conexión a terminales RCA hembra para transmisión de señal.
• Tarjeta de Grabación de Cuñas.
a) Grabación y reproducción de mensajes.
• Cableado Estructurado.
a) Estándares de Cableado. b) Cálculo de longitud de Onda. c) Conectores.

11
- Diagrama a bloques del Sistema
Ent.
Módulo Central 24 entradas x 12
salidas.
Altavoces
12 módulos de 2 Sensores
Altavoces
12

12
2. MICROCONTROLADORES. En las dos últimas décadas la microelectrónica ha tenido un crecimiento impresionante
y se ha dado paso a dispositivos microelectrónicos, capaces de alojar programas que permitan almacenar datos y controlar simultáneamente diferentes tareas a velocidades impresionantes en procesos de producción, monitoreo, sistemas de alarma, sistemas de control, etc.
Las soluciones, a nivel industrial y, en si, en la rama de la ingeniería, cada vez necesitan ser más prácticas; abatir costos, espacios y poseer una gran compatibilidad y adaptabilidad a otros sistemas, plataformas o protocolos establecidos. Los microcontroladores poseen capacidades sorprendentes como lo son el bajo consumo de energía, alta inmunidad al ruido, velocidades de operación del orden de nanosegundos, debido a su tamaño y arquitectura favorece la ergonomía de cualquier diseño electrónico, permitiendo abatir costos en el diseño de las tablillas y los gabinetes.
Los microcontroladores, en su mayoría, están constituidos por los siguientes módulos:
1. Unidad central de proceso CPU 2. Módulos de memoria.
a) ROM b) RAM c) EEPROM
3. Módulo de comunicación serie en modo síncrono y asíncrono. 4. Módulo de temporización y conteo. 5. Modulo de conversión A/D. 6. Módulo de Interrupciones. 7. Unidad lógica aritmética ALU. 8. Registros específicos programables.
Diversas empresas son las encargadas de manufacturar y revolucionar a los
microcontroladores; MOTOROLA, MICROCHIP, PHILIPS, ANALOG DEVICES, NATIONAL SEMICONDUCTORS, NATIONAL INSTRUMENTS, y otras tantas más que se encuentran en el mercado ofreciendo funcionalidad, innovación y desarrollo.
Microchip technology incorporated ha diseñado el microcontrolador PIC16F877,
perteneciente a la familia de los microcontroladores CMOS FLASH de 8 bits. Este dispositivo cuenta con la aceptación de muchos diseñadores debido al potencial brindado a las necesidades actuales.
CARACTERÍSITCAS
• Emplea tecnología RISC en el CPU, que le brinda una velocidad de procesamiento de información bastante alta.
• Se programa solamente con 35 instrucciones simples. • Todas las instrucciones ocupan un solo ciclo, con excepción de los saltos
ocasionados por las subrutinas dentro de la programación.

13
• Opera a velocidades de: 20 MHz. en el reloj de entrada y 200 ns para el ciclo de instrucciones.
• 8000 x 14 palabras en la memoria FLASH de programa. • 368 x 8 bytes en la memoria de datos. (RAM) • 256 x 8 bytes de memoria de datos EEPROM. • La salida en los pines es compatible con PIC16C73/74/76/77 • 14 fuentes de interrupción internas/externas. • 8 niveles bajos de bandera en el hardware. • Modos de direccionamiento directo, indirecto y relativo. • Power-on Reset • Power-up Timer y un oscilador para el Start-up timer. • Watchdog timer • Código de protección programable. • Mode SLEEP. • Selector de opciones de oscilador. • Bajo consumo de energía, tecnología CMOS FLASH/EEPROM de alta
velocidad. • Programación serial a través de 2 pines. • Fuente de 5 voltios necesaria para la programación. • Compilación en dispositivo a través de 2 pines. • Procesador de lectura/escritura accesado desde la memoria de programa. • Intervalo de operación de 2.0 a 5.5 voltios. • Corriente de carga/fuente de: 25 mA • Bajo consumo de poder. • Timer0: temporizador/contador de 8 bits, con preescala de 8 bits. • Timer1: temporizador/contador de 16 bits con preescala. • Timer2: temporizador/contador con registro de periodo de 8 bits, con preescala
y postescala. • Dos módulos de captura, comparación o PWM. • La captura es de 16 bits y la resolución es de 12.5 ns, la comparación es de 16
bits, con una resolución de 200 ns. El PWM posee una resolución de 10 bits. • Convertidor multi canal analógico-digital de 10 bits. • Puerto serial síncrono (SSP) con SPI (modo maestro) y I2C (modo esclavo). • Transmisor receptor universal síncrono asíncrono (USART/SCI) con 9 bits de
detección de dirección. • Puerto paralelo esclavo (PSP) con un ancho de 8 bits y controles RD, WR Y CS
externos. • Circuito detector de Brown-out RESET.

14
Ilustración 2-1. – Diagrama de Terminales del Microcontrolador Microchip 16F877A

15
Ilustración 2-2.- Descripción de terminales
El diagrama anterior muestra como muchas de las terminales contienen dos o más
funciones, ya sea de lectura/escritura, temporizador, contador, reloj, intercomunicación, etc. Dichas funciones podrán ser elegidas dependiendo de la configuración otorgada a cada terminal, basándose en el banco de trabajo y el registro correspondiente de configuración.
El PIC, dentro de la organización de la memoria de datos, se particiona en bancos que
contienen registros de propósito general, mismos que pueden seleccionarse a través de los bits RP1 y RP0.
RP1 RP0 BANCO0 0 Bank0 0 1 Bank1 1 0 Bank2 1 1 Bank3
Tabla 2-1.- Bancos
Cada banco posee 128 bytes y las locaciones más bajas de cada banco están reservadas
para registros de funciones especiales. A continuación se describe la distribución de los registros existentes en el microcontrolador con respecto al banco seleccionado.

16
2.1 REGISTROS
Ilustración 2-3.- Registros

17
Un microcontrolador puede alojar aplicaciones tan diversas como queramos, la limitante de estos, además de sus mismas características electrónicas y de arquitectura, es la capacidad que el programador muestre en el planteamiento del algoritmo, diagramas de tiempos y posteriormente los nmónicos y registros elegidos a través del programa. El programador deberá ser cuidadoso de los ciclos de reloj en el microcontrolador, con el objetivo de que los diagramas de tiempo contemplados no se vean alterados por cuestiones internas de orden de funcionamiento en las tareas del microcontrolador.
A continuación se darán a conocer todas las características de los registros utilizados en
el algoritmo del módulo de los sentidos y posteriormente analizaremos paso a paso la configuración inicial y la forma de programación adecuada en el MPLAB.
2.1.1 REGISTRO STATUS El registro de estado o STATUS REGISTER, contiene el estado aritmético del ALU,
RESET y la selección de bancos o BANK para la memoria de datos. De igual forma se puede conocer el estado de bits de control tales como Z, DC, C, cero, medio acarreo y acarreo respectivamente, que son fundamentales en las operaciones lógicas elaboradas en el programa.
Registro de estado (STATUS REGISTER) direcciones 03H, 83H, 103H, 183H.
2.1.2 REGISTRO INTCON Es un registro de lectura y escritura que contiene diversos bits de activación y bits de
bandera para los registros de sobre flujo del TMR0, cambios del puerto RB y las interrupciones de las terminales RB0/INT.

18
2.1.3 REGISTRO PIE1
Este registro contiene los bits individuales de activación para las interrupciones de los periféricos como lo son: puerto paralélelo, convertidor analógico digital, USART, SSP, CCP1, TMR2 a PR2 y TMR1IE.
2.1.4 REGISTRO PIR1 Este registro contiene los bits individuales de bandera para las interrupciones de los
periféricos.
2.1.5 REGISTRO SSPSTAT Este es el registro de estado del puerto serial síncrono.
2.1.6 REGISTRO SSPCON Registro de control para el puerto serial síncrono.

19
2.1.7 REGISTRO ADCON1 Este registro configura el convertido Analógico Digital.
2.2 CONFIGURACIÓN DE PUERTOS El PIC16F877A cuenta con 5 puertos de control, A, B, C, D y E. Estos puertos de
intercomunicación entre el proceso y el microcontrolador pueden contener dos o más funciones en cada una de sus terminales, las cuales son elegidas a través del registro TRISA, TRISB, TRISC, TRISD Y TRISE, respectivamente, en conjunto con registros específicos de configuración.
Los puertos en su totalidad son bidireccionales, es decir, pueden ser utilizados para
enviar datos o para recibirlos, siguiendo estos un patrón de configuración tal que al modificar una o varias terminales en estado alto “1”, en el registro TRIS correspondiente, activaremos dicha terminal como entrada, así mismo, si es modificado a un estado bajo “0”, la terminal poseerá cualidades como salida.
Como ha sido descrito en el REGISTER FILE MAP, los registros de configuración
TRIS pertenecen al banco 1 y para su modificación a lo largo del programa, debe existir una interacción con el STATUS REGISTER tras modificar el bit RP0 y así enviar valores a PORTA o configurar TRISA, tal como lo muestra el siguiente ejemplo:
BCF STATUS, RP0 CLRF PORTA ; inicializa PORTA limpiando cualquier dato retenido En las terminales. BSF STATUS, RP0 ; Selección del Bank1 en el STATUS REGISTER. MOVLW 0Xcf MOVWF TRISA Las terminales RA (3:0) han sido configuradas como salidas y RA (5:4) siempre son
leídas como “0”. Tal como se muestra en el PINOUT DESCRIPTION, y como se ha mencionado al
inicio de éste capítulo, existen diversas funciones en cada uno de los puertos pertenecientes al PIC16F877A, éstas, en caso de ser necesarias en el desarrollo del proyecto serán explicadas en los temas subsecuentes, y así, se hará de su conocimiento la configuración de registros y función de las terminales para cada uno de los puertos.

20
2.3 MODO SPI El modo Serial Peripheral Interface SPI es, como su nombre lo dice, una interfase serial
periférica, es decir, permite enviar y recibir datos simultáneamente de manera síncrona con un ancho de 8 bits. Se realiza a través de las siguientes terminales:
• SDO, dato serial de salida. • SDI, dato serial de entrada. • SCK, reloj serial. • Existe una cuarta terminal que es utilizada cuando opera el modo esclavo,
SS. Cuando se inicializa el SPI, se necesitan especificar muchas opciones. Esto se hace
mediante la programación adecuada de los bits de control (SSPCON 5:0 y SSPSTAT 7:6). Estos bits de control especifican lo siguiente: • Modo Maestro (SCK es el reloj de salida) • Modo Esclavo (SCK es el reloj de entrada) • Polaridad del Reloj (SCK se encuentra en estado Idle) • Muestreo de fase del dato de entrada (mitad o final del tiempo de dato de salida) • Flanco de reloj (la salida del dato se hará en el flanco de subida/bajada del SCK) • Velocidad de reloj (únicamente disponible en el modo maestro) • Modo de selección de esclavo (únicamente disponible en el modo esclavo)
Ilustración 2-4 .- Interface serial periférica

21
Existe un módulo denominado MSSP que se encarga de realizar todas las tareas necesarias en el modo SPI y consiste de un registro de cambio de transmisión/recepción (transmit/receive Shift Register SSPSR) y de un registro acumulador (buffer register SSPBUF).
El SSPSR cambia el dato de entrada y salida del dispositivo, comenzando por el bit más significativo. El SSPBUF retiene el dato que será escrito en el SSPSR, hasta que el dato recibido es leído. Una vez que los 8 bits de datos han sido recibidos, este byte es movido al registro SSPBUF. Entonces el acumulador detector de bit lleno BF (SSPSTAT 0) y el bit de bandera de interrupción SSPIF (PIR1 3) son puestos a “1”. Esta doble acumulación del dato recibido (SSPBUF) lleva al siguiente byte a iniciar la recepción antes de leer el dato que acabó de ser recibido. Cualquier escritura al registro SSPBUF durante la transmisión/recepción del dato será ignorada, y el bit de detección de coalición WCOL (SSPCON 7) será puesto a “1”. El usuario mediante programación deberá limpiar el bit WCOL para que de esta forma pueda determinar si la siguiente escritura en el registro SSPBUF se completó satisfactoriamente.
Cuando el programa de aplicación está esperando recibir un dato, el SSPBUF deberá ser leído antes de que sea escrito el siguiente byte de datos a transferir en el SSPBUF. El BF indicará cuándo el SSP-BUF ha sido cargado con el dato transmitido, es decir, la transmisión ha sido completada. Cuando el SSPBUF es leído, el bit BF es limpiado. Este dato puede ser irrelevante si el SPI es únicamente un transmisor. Generalmente la interrupción MSSP es usada para determinar cuando la transmisión/recepción ha sido completada. El SSPBUF debe ser leído y/o escrito, si el método de interrupción no será usado, entonces la interrogación por programación puede ser hecha para asegurarse de que no ocurrió una escritura de coalición.
Ejemplo de cómo se debe cargar el SSPBUF para la transmisión de datos. BSF STATUR, RP0 ; banco 1
LOOP BTFSS SSPSTAT, BF ; ¿se recibió el dato? GOTO LOOP BCF STATUS, RP0 ; banco 0 MOVF SSPBUF, W MOVWF RXDATA ; guardado en memoria RAM MOVF TXDATA, W MOVWF SSPBUF ; nuevo dato a transmitir El SSPSR no puede ser escrito o leído directamente, y solamente se puede tener acceso
a él direccionando el registro SSPBUF. Adicionalmente, el registro de estado MSSP (SSPSTAT) indica las diversas condiciones de estado.

22
2.3.1 ACTIVACIÓN DE LOS PUERTOS DE ENTRADA/SALIDA EN EL SPI.
Para la activación del puerto serial, el bit SSPEN (SSPCON 5) debe ser modificado a
“1”. Para reiniciar o reconfigurar el modo SPI, se modifica el bit SSPEN a “0”, con esto se reinicializa el registro SSPCON, y así solamente resta fijar a “1” SSPEN. Esto configura las terminales SDI, SDO, SCK y SS como terminales del puerto serial. Estas terminales del puerto serial poseen una configuración específica en el registro TRIS, esto es:
• SDI es automáticamente controlado por el módulo SPI. • SDO debe ser modificado a “0” el bit TRISC 5 • SCK (Modo maestro) debe modificar a “0” el bit TRISC 3 • SCK (Modo maestro) debe modificar a “1” el bit TRISC 3 • SS debe modificar a “1” el bit TRISA 5
De esta forma, no existirá conflicto alguno con la configuración del puerto serial y las
terminales correspondientes de cada puerto. La siguiente figura muestra una conexión típica entre dos microcontroladores. El
controlador maestro (procesos 1) inicia la transferencia de datos tras enviar la señal SCK. El dato es sacado de ambos registros de cambio (shift register), sobre el flanco de reloj programado, y retenido en el flanco contrario del reloj. Ambos procesadores deben ser programados con la misma polaridad de reloj CKP, entonces ambos controladores enviarán y recibirán datos al mismo tiempo. Ya sea que el dato sea erróneo o un dato incompleto, dependerá de la aplicación del programa. Esto nos lleva a la existencia de tres escenarios para la transmisión de datos.
• Maestro envía dato – esclavo manda un dato incompleto. • Maestro envía dato – esclavo manda un dato completo. • Maestro envía un dato incompleto – esclavo envía un dato.
Ilustración 2-5.- Modo Maestro/esclavo

23
2.3.2 MODO MAESTRO El maestro puede iniciar la transferencia de datos a cualquier momento porque el
controla el SCK. El maestro determina cuándo el esclavo (procesador 2) emita el dato mediante el protocolo del programa.
En el modo maestro el dato es transmitido/recibido tan rápido como el registro SSPBUF es escrito a. si el módulo SPI solamente recibirá, la salida SDO puede ser deshabilitada (programada como una entrada). El registro SSPSR continuará enviando los datos en la señal presente sobre la terminal SDI a la velocidad de reloj programado. Así como se va recibiendo cada byte, éste se va guardando dentro del registro SSPBUF como si fuera un dato normal recibido (interrupciones y bits de estado propiamente fijados). Esto puede ser usado en aplicaciones de recepción como una “línea de monitoreo activa”.
La polaridad del reloj es seleccionada por la correcta programación del bit CKP (SSPCON 4). Entonces esta generará formas de onda para la comunicación SPI como se muestra en la siguiente figura donde el bit más significativo es transmitido primero. En el modo maestro, la velocidad de reloj del SPI es elegida mediante programación para ser una de las siguientes:
• FOSC/4 ( o TCY) • FOSC/16 (o 4 * TCY) • FOSC/64 (o 16*TCY) • Timer2 salida/2
Esto lleva al bit de reloj a una frecuencia máxima desde 20 MHz. a 5.0 MHz. La figura 6 muestra las ondas de formas de onda para el modo maestro. Cuando CKE =
1, el dato SDO es válido antes de que haya un flanco de reloj en el SCK. El cambio de la entrada de muestreo se muestra con base en el estado de bit SMP. El tiempo en el que SSPBUF es cargado con el dato recibido se muestra.
Ilustración 2-6 .- Diagrama de tiempos (MM)

24
2.3.3 MODO ESCLAVO En el modo esclavo, el dato es transmitido y recibido conforme aparecen los pulsos del
reloj externo sobre SCK. Cuando el último bit es retenido, el bit de interrupción de bandera SSPIF (PIR1 3) es modificado a “1”.
En el modo esclavo el reloj externo es suplido por la fuente de reloj externa en la terminal SCK. Este reloj externo debe cumplir con los tiempos altos y bajos eléctricamente especificados.
En el modo sleep, el esclavo puede transmitir/recibir datos. Cuando un byte es recibido el dispositivo regresará del modo sleep.
2.3.4 SINCRONIZACIÓN DE SELECCIÓN DE ESCLAVO. La terminal SS se encarga de sincronizar el modo esclavo. El SPI debe estar en modo
esclavo con el bit de control SS activado (SSPCON 3:0=0100). La terminal no debe ser manejada como “0” para funcionar SS como una entrada. TRISA 5 debe ser modificada a “1”. Cuando la termi9nal SS está en bajo, la transmisión y recepción son activadas y la terminal SDO es manejada. Cuando SS va a alto, SDO no puede ser manejada, al igual que si se encuentra a la mitad de un byte transmitido y al comienzo de una salida flotante. El uso de resistencias pull-up/pull-down es conveniente, dependiendo de la aplicación.
Cuando el módulo SPI se reinicia, el bit contador es forzado a “0”. Esto puede ser echo
forzando de igual forma el SS a un nivel alto o limpiando el bit SSPEN. Para emular una comunicación de 2 vías, el SDO puede ser conectado al SDI. Cuando
el SPI necesite aperar como un receptor el SDO puede ser configurado como una entrada. Esto deshabilita la transmisión del SDO. El SDI siempre puede ser dejado como una entrada (función del SDI) ya que este no puede causar un conflicto en el bus.
2.4 OPERACIÓN DEL MSSP I2C El módulo MSSP en el modo I2C emplea totalmente las funciones del maestro y esclavo
(incluyendo el soporte de llamada general) y provee interrupciones en el inicio y parada de bits en el hardware para determinar un bus libre (función mul timaestro). El MSSP implementa tanto el modo estándar de especificación 7 bit como el de 10 bits de direccionamiento.
Un filtro de interferencia es puesto sobre el SCL y SDA cuando la terminal es una entrada. Este filtro opera tanto en el modo de 100 kHz como en el de 400kHz. En el modo de 100 kHz, cuando éstas terminales se encuentran configuradas como salida, hay una control bajo de velocidad de la terminal, que es independiente a la frecuencia del dispositivo.
Dos terminales son usadas para la transferencia de datos. Estos son el SCL, que es el reloj, y el SDA que es el dato. El SDA y SCL son configurados automáticamente cuando el I2C es activado. Las funciones del SSP son activadas tras modificar a “1” el bit SSPEN (SSPCON 5).

25
El módulo MSSP contiene seis registros para la operación del I2C y son:
• SSP registro de control (SSPCON) • SSP registro 2 de control (SSPCON2) • SSP registro de estado (SSPSTAT) • Acumulador serial de transmisión/recepción (SSPBUF) • SSP registro de cambio (SSPSR) no se puede tener acceso a él directamente. • SSP registro de direccionamiento (SSPADD).
El SSPCON lleva el control de la operación del I2C. Cuatro bits de selección (SSPCON
3:0) especifican cuál de los siguientes modos del I2C fue seleccionado:
• I2C modo esclavo (7 bits direccionales) • I2C modo esclavo (10 bits direccionales) • I2C modo maestro, reloj =OSC/4 (SSPADD +1)
Antes de seleccionar cualquier modo del I2C, el SCL y el SDA deben ser programados
como entradas tras la correcta configuración de estos en los bits del TRIS. Una vez que se seleccione el modo I2C, tras la activación del bit SSPEN, activará el SCL y el SDA para ser usados como líneas de reloj y dato, respectivamente.
El bit CKE (SSPSTAT 67) fija los niveles del SDA y SCL en cada modo, ya sea
maestro o esclavo. Cuando CKE =1, el nivel conformará la especificación del SMBUS. Cuando CKE =0, el nivel será conformado mediante la especificación del I2C.
El SSPSTAT dará el estado del dato transmitido. Esta información incluye la detección
de los bits de INICIO y PARADA, especifica si el byte recibido fue dato o dirección, si el siguiente byte es complemento de los 10 bits direccionables, y si éste será leído o escrito en el dato transmitido.
SSPBUF es el registro a través del cual será escrito o leído el dato transmitido. El SSPSR intercambio el dato adentro a afuera del dispositivo. En la operación de recepción, el SSPBUF y el SSPSR crean un doble acumulador receptor. Esto nos lleva a la recepción del nuevo byte que comenzará antes de ser leído el último byte del dato recibido. Cuando el byte es recibido por completo, es transferido al SSPBUF y la el bit de bandera SSPIF es fijado. Si cualquier otro byte es recibido completo antes de que el SSPBUF sea leído, un sobre flujo ha ocurrido y el bit SSPOV (SSPCON 6) es fijado y el byte en el SSPSR es perdido.
El SSPADD retiene la dirección del esclavo. En el modo de 10 bits, el programador necesita escribir el byte más alto en la dirección (1111 0 A9 A8 0). En seguida del byte más alto puesto en la dirección, el byte bajo de la dirección necesita se guardado (A7:A0).
2.4.1 MODO ESCLAVO En el modo esclavo, el SCL y el SDA deben ser configurados como entradas. El MSSP
anulará el estado de entrada junto con el dato de salida cuando sea requerido (transmisión esclavo).

26
Cuando una dirección es conjuntada o es recibido un dato después de que una dirección sea conjuntada, el hardware automáticamente generará el reconocimiento del pulso ACK y entonces cargará el SSPBUF con el valor recibido que se encuentra en el SSPSR.
Hay ciertas condiciones que pueden causar que el MSSP no entregue el pulso ACK: a) El BF fue modificado a “1” antes de que la transferencia fuera recibida. b) El SSPOV fue fijado antes de que la transferencia fuera recibida. Si el BF es fijado, el valor del SSPSR no es cargado dentro del SSPBUF, pero el SSPIF
y el SSPOB son fijados. Cuando un byte de dato transferido es recibido, da el estado de los bits BF y SSPOV. La última celda muestra la condición donde el programador no limpió propiamente la condición de sobre flujo. BF es limpiado tras la lectura de SSPBUF mientras que SSPOV es limpiado a través de programación.
El reloj de entrada SCL debe tener un tiempo alto y bajo mínimo para la operación adecuada. Los tiempos de alto y bajo de la especificación I2C, así como los requeridos por el módulo MSSP son mostrados en el parámetro de tiempo #100 y #101 de las especificaciones eléctricas.
2.4.2 DIRECCIONAMIENTO Una vez que el MSSP ha sido activado, espera que ocurra la condición de INICIO.
Seguido de las condiciones de INICIO, los 8 bits son intercambiados dentro del SSPSR. Todos los bits introducidos son muestreados con el flanco de subida del reloj SCL. El valor del registro SSPSR 7:1 es comparado con el valor del SSPADD. La dirección es comparada con el flanco de bajada del octavo pulso de reloj SCL. Si la dirección conjuntada y el BF y el SSPOB son limpiados, los siguientes eventos ocurrirán:
a) El valor del SSPSR es guardado dentro del SSPBUF en el flanco de bajada del
octavo pulso del SCL. b) El BF es fijado en el flanco de bajada del octavo pulso del SCL. c) Se genera un pulso ACK. d) El bit de bandera de interrupción SSP, SSPIF (PIR1 3) es fijado (se genera una
interrupción si está activado) en el flanco de subida del noveno pulso del SCL. En el modo de 10 bits, dos bytes direccionables necesitan ser recibidos por el esclavo.
El quinto bit más significativo (MSbs) del primer byte direccionable, especifica si éste es un modo de 10 bits. El bit R/W (SSPSTAT 2) especifica una lectura entonces el dispositivo esclavo recibirá el segundo byte direccionable. Para el modo de 10 bits, el primer byte debe ser igual a “1111 0 A9 A8 0” donde A9 y A8 son los dos MSbs de la dirección. La secuencia de eventos para el modo de 10 bits se da de la siguiente manera, de 7 a 9 pasos para la transmisión esclavo:
1. Recibir el primer byte (alto) de la dirección (los bits SSPIF, BF y el bit UA
(SSPSTAT 1) son fijados).

27
2. La actualización del SSPADD con el segundo byte (bajo) de la dirección (se limpia el bit UA y libera la línea SCL).
3. Leer el SSPBUF (se limpia el BF) y limpiar el bit de bandera SSPIF. 4. Recibir el segundo byte (bajo) de la dirección (bits SSPIF, BF y UA son fijados). 5. al actualizar SSPADD con el primer byte (alto) de la dirección. Esto limpiara el UA y
liberará la línea SCL. 6. Leer el SSPBUF (esto limpia a BF) y limpiar el bit de bandera SSPIF. 7. Recibir condiciones de INICIO repetidamente. 8. Recibir primer byte (alto) de la dirección (bits SSPIF y BF son fijados). 9. Leer el SSPBUF (esto limpia a BF) y limpiar el bit de bandera SSPIF.
2.4.3 RECEPCIÓN ESCLAVO Cuando el R/W del byte de dirección es limpiado y ocurre la conjunción de la dirección,
el R/W del SSPSTAT es limpiado. La dirección recibida es cargada dentro del SSPBUF. Cuando existen condiciones de sobre flujo en el byte de dirección entonces no habrá un
reconocimiento del pulso ACK. Una condición de sobre flujo es definida tanto por la modificación a “1” del BF como por la modificación a “1” del SSPOV.
Una interrupción en el SSP es generada por cada byte de datos transferido. El bit de bandera SSPIF debe ser limpiado mediante programación. El SSPSTAT es usado para determinar el estado del byte recibido.
2.4.4 TRANSMISIÓN ESCLAVO Cuando el R/W del byte de direcciones recibido es fijado y ocurre una conjunción de
dirección, el R/W del SSPSTAT es fijado. La dirección recibida es cargada dentro del SSPBUF. El pulso ACK se enviará en el noveno bit y el SCL es llevado a un nivel bajo. El dato transmitido debe ser cargado dentro del SSPBUF el cual también carga el SSPSR. Entonces el SCL deberá ser activado modificando a “1” el CKP (SSPCON 4). El maestro debe monitorear el SCL antes de afirmar otro pulso de reloj. El dispositivo esclavo puede mantener en off el maestro tras alargar el reloj. El bit ocho del dato será intercambiado hacia fuera en el flanco de bajada de la entrada del SCL. Esto asegura que la señal del SDA es válida durante el tiempo alto del SCL.
Una interrupción es generada en el SSP por cada byte de datos transmitido. El SSPIF debe ser limpiado mediante programación y el SSPSTAT es usado para determinar el estado del byte transferido. El SSPIF es fijado en el flanco de bajada del noveno pulso de reloj.
Como un transmisor esclavo, el ACK del receptor maestro es retenido en el flanco de subida del noveno pulso de entrada del SCL. Si la línea SDA fue alta (no existió ACK), entonces el dato transferido esta completo. Cuando no existió ACK y es retenido por el esclavo, la lógica del esclavo se reinicia y entonces el esclavo monitorea la ocurrencia de otro bit de INICIO. Si el SDA fue bajo (ACK), el dato transmitido debe ser cargado dentro del SSPBUF el cual también es cargado en el SSPSR. Entonces el SCL deber ser activado tras modificar a “1” el CKP.

28
2.4.5 SOPORTE DE DIRECCIÓN DE LLAMADA GENERAL El proceso de direccionamiento para el bus del I2C es de la siguiente forma, el primer
byte después la condición de INICIO usualmente determina cuál dispositivo será direccionado como esclavo por el maestro. La excepción es el soporte de dirección de llamada general, el cual puede direccionar todos los dispositivos. Cuando esta dirección es usada, todos los dispositivos, en teoría, responden con un reconocimiento.
La dirección de llamada general es reconocida cuando el bit de activación de llamada general (GCEN) es activado (SSPCON2 7 es fijado). Siguiendo una detección de bit de inicio, 8 bits serán intercambiados en el SSPSR y la dirección es comparada nuevamente con el SSPADD, y también es comparada con la dirección de llamada general, arreglada en hardware.
Si la dirección de llamada general es conjuntada, el SSPSR es transferido al SSPBUF, el bit de bandera BF es fijado (octavo bit), y sobre el flanco de bajada del noveno bit (ACK) es fijado SSPIF.
Cuando la interrupción funcionó, puede verificarse el origen si se lee el contenido del SSPBUF para determinar si la dirección fue de un dispositivo en específico o por una dirección de llamada general.
En el modo de 10 bits, el SSPADD es requerido para ser actualizado por la segunda mitad de la dirección conjuntada, y el UA es fijado. Si la dirección de llamada general es muestreada cuando GCEN es fijado mientras que el esclavo es configurado en el modo de 10 bits, entonces la segunda mitad de la dirección no es necesaria, el UA no será fijado y al esclavo comenzará la recepción del dato después del reconocimiento.
2.4.6 MODO MAESTRO El modo maestro de operación es soportado por la generación de la interrupción en la
detección de las condiciones de INICIO Y PARO. Los bits de PARO (P) e INICIO (S) son limpiados con un reinicio o cuando el MSSP es deshabilitado. El control del bus en el I2C puede ser tomado cuando el bit P es fijado, o el bus es idle con los dos bits limpios (P Y S).
En el modo maestro, las líneas SCL y SDA son manipuladas por el hardware del MSSP. Los siguientes eventos causarán un bit de bandera de interrupción, SSPIF, que será
fijado (la interrupción SSP está activada).
• START (condición de INICIO) • STOP (condición de PARO) • Byte de transferencia de datos transmitido/recibido. • Reconocimiento de transmisión. • Señales de inicio repetidas.

29
2.4.7 MODO MULTIMAESTRO En este modo, la interrupción generada en la detección de las condiciones de INICIO y
PARO, nos lleva a la determinación de cuándo el bus esta libre. El P y el S son limpiados mediante un reset o la deshabilitación del MSSP. El control del bus en el I2C será tomado cuando el bit P (SSPSTAT 4) es fijado, o el bus está inactivo (idle) con los dos bits limpios. Cuando el bus está ocupado, la habilitación de la interrupción SSP generará la interrupción cuando las condiciones de P ocurran.
En la operación de multimaestro, la línea SDA debe ser monitoreada para corroborar si el nivel de la señal es el nivel de salida esperado. Este chequeo es llevado a cabo en hardware y el resultado es puesto en el bit BCLIF.
Los datos que por arbitración pueden ser perdidos son:
• Transferencia de dirección • Transferencia de datos. • Una condición de INICIO. • Una condición de inicio repetida. • Una condición de reconocimiento.
2.4.8 SOPORTE DEL MODO MAESTRO PARA EL I2C El modo maestro es activado tras fijar o limpiar el bit apropiado de SSPM en el registro
SSPCON y tras fijar el bit SSPEN. Una vez que el modo maestro ha sido activado, el usuario tiene 6 opciones:
- Asegurar una condición de inicio en el SDA y en el SCL. - Asegurar una condición de inicio repetida en el SDA y en el SCL. - Escribir en el registro SSPBUF una inicialización de datos/dirección. - Generar una condición de paro en el SDA y en el SCL. - Configurar el puerto I2C para recibir datos. - Generar una condición de reconocimiento al final de una byte de datos recibido.
2.4.9 OPERACIÓN DEL MODO MAESTRO EN EL I2C El dispositivo maestro genera todos los pulsos del reloj serial y las condiciones de
INICIO y PARO. La transferencia se termina con una condición de P o cuan una condición repetida de S. Desde la condición repetida de S y también del principio de la siguiente transferencia serial, el bus del I2C no será liberado.
En el modo de transmisión maestro el dato serial es sacado a través del SDA, mientras el reloj serial es sacado a través del SCL. El primer byte transmitido contiene la dirección del esclavo del dispositivo recibido, (7 bits) y el bit R/W. in este caso, el R/W será un “0” lógico. El dato serial es transmitido a razón de 8 bits por tiempo. Después de cada bit transmitido, un bit de reconocimiento es recibido, las condiciones de S y P son sacadas para indicar el principio y el final de la transferencia serial.

30
En el modo de recepción maestra, el primer byte transmitido contiene la dirección del esclavo del dispositivo transmitido (7 bits) y el bit R/W. En este caso, el bit R/W será un 1 lógico. De esta forma, el primer byte transmitido es la dirección del esclavo de 7 bits, seguida de un 1 para indicar un bit recibido. El dato serial es recibido vía SDA mientras que SCL saca el reloj serial el dato serial de 8 bits es recibido al tiempo. Después cada byte es recibido, un bit de reconocimiento es transmitido. Las condiciones de S y P indican el principio y el fin de la transmisión.
El generador de velocidad de baudios, usado por el modo de operación del SPI es ahora
usado para fijar el reloj de frecuencia SCL para cada una de las siguientes frecuencias de operación del I2C 100 kHz, 400 kHz o 1 MHz. El generador de velocidad de baudios recarga el valor que contiene el menor de los 7 bits del registro SSPADD. También éste comenzará a contar automáticamente cada que se escriba en el SSPBUF. Una vez que la operación que se dio ha sido completada (la transmisión del último bit de datos es seguida de un ACK) el reloj interno pararé automáticamente de contar y el SCL se quedará en este último estado.
Una transmisión típica debe tener la siguiente secuencia: a) El programador genera una condición de inicio tras fijar el bit SEN en el
SSPCON2. b) SSPIF es fijado. El módulo esperará el tiempo requerido de inicio antes de que
cualquier otra operación tome lugar. c) El programador cargará el SSPBUF con la dirección a transmitir. d) La dirección es intercambiada hacia fuera en el SDA hasta que todos los 8 bits han
sido transmitidos. e) El MSSP intercambia el bit ACK desde el dispositivo esclavo, y escribe este valor
dentro del SSPCON2 (SSPCON2 6). f) El módulo genera una interrupción al final del noveno ciclo de reloj tras fijar
SSPIF. g) El programador carga el SSPBUF con ocho bits de datos. h) El dato es intercambiado hacia fuera en el SDA hasta que todos los 8 bits han sido
transmitidos. i) El MSSP intercambia en el ACK desde el dispositivo esclavo, y escribe este valor
dentro del SSPCON2. j) El MSSP genera una interrupción al final del noveno ciclo de reloj tras fijar el bit
SSPIF. k) El programador genera una condición de paro tras fijar el bit PEN en el
SSPCON2. l) Una interrupción se genera una vez que la condición de PARO es completada. .

31
2.5 CONVERTIDOR ANALÓGICO DIGITAL A/D. El módulo convertido de analógico a digital posee ocho entradas. La entrada analógica
carga una muestra y retienen al capacitor. La salida del muestreo y del capacitor retenido es la entrada a convertir. El convertidor entonces genera un resultado digital de este nivel analógico vía aproximaciones sucesivas. Esta conversión A/D, de la señal de entrada analógica, resulta en un número digital correspondiente de 10 bits.
El convertidor analógico digital A/D posee una única característica y es la de estar listo para operar mientras el dispositivo se encuentra en estado SLEEP. Para operar en sleep, el reloj del A/D debe provenir del oscilador RC interno del A/D.
El módulo A/D posee cuatro registros, estos son:
• A/D registro de resultado alto (ADRESH) • A/D registro de resultado bajo (ADRESL) • A/D registro0 de control (ADCON0) • A/D registro1 (ADCON1)
El registro ADCON0 controla la operación del módulo A/D. el registro ADCON1,
configura las funciones de las terminales del puerto. Las terminales del puerto pueden ser configuradas como entradas analógicas o como una terminal de entrada/salida digital.
El registro ADRESH: ADRESH en 10 bits contiene el resultado de la conversión A/D.
Cuando una conversión es completada, el resultado es cargado dentro de éstos dos registros y el bit GO/DONE (ADCON0 2) es limpiado, y el bit de interrupción del A/D, ADF es fijado.
Después de que el módulo A/D ha sido configurado, el canal seleccionado debe ser adquirido antes de que inicie la conversión. Los canales de entrada analógica deben tener los bits correspondientes en el registro TRISA para ser configurados como entradas. Después del tiempo de adquisición ha transcurrido, la conversión A/D puede comenzar. Los siguientes pasos deben ser seguidos para realizar la conversión A/D:
1. Configuración del módulo A/D • Configurar las terminales análogas / voltajes de referencia y el I/O digital
(ADCON1) • Seleccionar el canal de entrada del A/D (ADCON0). • Seleccionar el reloj de conversión del A/D (ADCON0). • Encender el módulo A/D (ADCON0).
2. Configurar las interrupciones del A/D (en caso de ser necesario). • Limpiar el bit ADIF

32
• Fijar el bit ADIE. • Fijar el bit GIE.
3. esperar el tiempo de adquisición requerido. 4. Comenzar la conversión:
• Fijar el bit GO/DONE (ADCON0). 5. Esperar a que la conversión A/D se complete
• Recibir a que el bit GO/DONE sea limpiado O
• Esperar por la interrupción A/D. 6. Leer el resultado del A/D en el par de registros (ADRESH: ADRESH), limpiar el
bit ADIF es requerido. 7. Para la siguiente conversión, paso 1 y paso 2 como sea requerido. El tiempo de
conversión del A/D por bit es definido como TAD. Una mínima espera de 2 TAD es requerida antes de iniciar una nueva adquisición.
2.5.1 REQUERIMIENTOS PARA LA ADQUISICIÓN EN EL A/D. Para conocer la efectividad del convertidos A/D, el capacitor retenedor de carga
(CHOLD) debe ser seguido de una carga completa para el nivel de voltaje del canal de entrada. La impedancia de la fuente (RS) y la impedancia interna de muestreo de interrupción (RSS) afectan directamente el tiempo requerido de carga del CHOLD. RSS varia conforme el voltaje del dispositivo. La máxima impedancia recomendad para las fuentes analógicas es de 10 kW. Como la impedancia es decreciente, el tiempo de adquisición puede también decrementarse. Después de que se selecciona el canal de entrada analógico, esta adquisición debe ser hecha antes de que la conversión pueda empezar.
Para calcular el tiempo mínimo de adquisición se utiliza la ecuación que a continuación se muestra, la cual asume que se usa ½ del error del bit menos significativo LSb (1024 pasos para el A/D). El error de ½ de LSb es el error máximo permitido para el A/D para conocer su resolución específica.
TACQ = amplifier settling time + holding capacitor charging time + temperatura
coefficient = TAMP + TC + TCOFF. Ejemplo: CHOLD = 120pF RS = 10 k ohm Error de conversión = ½ LSb VDD = 5 v – RSS = 7 kohm Temperatura = 50 º C VHOLD = 0 v @ tiempo = 0 Tiempo mínimo de carga:

33
( ) ( )( )( ))/(12048 SSSICHOLD RRRCTcREFREFHOLD eVVV ++−−•−=
( )( ) ( )20471ln1120 SSSC RRKpFT ++Ω−=
Tiempo de adquisición mínimo requerido:
( )( )[ ]( ) ( )
sTRRRCT
CsTEMPTsTCtemp
TTTT
ACQ
SSSICHOLDC
CACQ
COFFCAMPACQ
µ
µµ
72.192047/1ln
/º05.0º252º25
=++−=
−++=⟩
++=
2.5.2 SELECCIÓN DEL RELOJ DE CONVERSIÓN DEL A/D El tiempo de conversión por bit es definido como TAD. La conversión requiere un
mínimo de 12 TAD por conversión de 10 bits. La fuente del reloj de conversión es seleccionada mediante programa y las cuatro posibles opciones para el TAD son:
• 2TOSC • 8TOSC • 32TOSC • Oscilador interno RC
Para la correcta conversión, el reloj debe ser seleccionado de tal forma que se asegure
un mínimo tiempo de 1.6 sµ
Tabla 2-2 . - Fuente de Reloj AD

34
2.5.3 CONFIGURACIÓN DE LAS TERMINALES ANALÓGICAS DEL PUERTO.
Los registros ADCON1 y TRIS controlan la operación de las terminales del puerto
dedicadas al A/D. Las terminales del puerto que han sido destinadas como entradas analógicas, deben de tener los bits correspondientes en el registro TRIS fijados. Si un bit se encuentra en el estado “0” (configurado como salida), el nivel digital de salida será convertido
2.5.4 CONVERSIÓN A/D El siguiente ejemplo muestra como se lleva a cabo una conversión A/D. Las terminales
analógicas son configuradas como entradas analógicas. Las referencias analógicas son VDD y VSS. La interrupción en el A/D está habilitada y el reloj de conversión es FRC, la conversión se lleva a cabo en RA0/AN0 del canal 0.
Si el bit GO/DONE fuera modificado a “0” durante la conversión, esto provocaría un
aborto en la operación. El par de registros no se actualizará con el resultado parcial de muestreo. Esto es, el par de registros continuará conteniendo el valor de la última conversión completada. Después de que la conversión es abortada, se requiere de un tiempo 2TAD antes de que se inicie la siguiente adquisición. Después de este 2TAD, la adquisición en el canal seleccionado es iniciada automáticamente.

35
3. DISPOSITIVOS
3.1 MULTIPLEXORES Este tipo de dispositivos también son conocidos como distribuidores y selectores de
datos y son requeridos en los procesos donde se tengan que controlar un número considerables de variables a través de un solo dispositivo. El MUX, selecciona datos en una o más líneas de entrada y los aplica a un solo canal de salida, de acuerdo a un código binario que se aplica a las líneas de control. La información presente en las líneas de entrada, será llevada a la salida en una conversión de 2n, esto es, si se poseen 2 entradas obtendremos la información en 4 salidas, de 3 a 8, de 4 a 16 líneas y así sucesivamente.
Existen diversos tipos de multiplexores y en nuestro caso hemos elegido el CD4067B, es un multiplexor/demultiplexor CMOS analógico de 16 canales. Básicamente son interruptores analógicos controlados digitalmente, teniendo baja impedancia en activo “ON”, baja corriente de fuga en bajo “OFF” y un decodificador interno de dirección. Posee 4 entradas binarias de control, A, B, C, D y una entrada de inhibición, de tal forma que cualquier combinación de las entradas seleccionadas selecciona uno de los interruptores.
El dispositivo posee una terminal común de entrada/salida, función que depende directamente si se utiliza como un multiplexor o como un demultiplexor.
En nuestro caso, utilizando el dispositivo como un circuito multiplexor, tendremos la terminal común de entrada/salida configurada como salida, esto es: en alguna de las 16 terminales contenidas en el CI, se presentará una activación, a su vez, mediante el microcontrolador, se envían datos binarios a las terminales de control y al encontrar una similitud entre el código binario en las terminales de control y la terminal o interruptor correspondiente en las 16 terminales, se emitirá un estado alto “1” a través de la terminal común de entrada/salida, permitiendo al usuario el conocimiento del dispositivo específico que ha enviado la información.
Tabla 3-1 .- Tabla de verdad CD4067B
Como es de comprender, las ventajas ofrecidas por un multiplexor es el poder controlar la activación o recepción de datos de “2n” dispositivos, a través de “n” entradas de control y

36
así simplificar diseños electrónicos sustituyendo dos o más dispositivos de adquisición de datos por un solo multiplexor.
3.2 RETENEDORES “LATCH” Los circuitos retenedores, también conocidos como circuitos biestables activados por
nivel, representan una herramienta muy funcional en el diseño de circuitos digitales pues la elaboración de tareas sencillas como controlar un proceso de paro arranque o tareas más elaboradas como controlar EPROM, ISD’s, atenuadores de sonido, entre otros, se tornan poco complicadas ante las ventajas ofrecidas por el 74HCT259.
Este es un dispositivo CMOS con compuertas de Silicio y que trabaja a alta velocidad.
Posee 8 retenedores direccionables diseñado para aplicaciones de almacenamiento de propósito general en sistemas digitales. Estos dispositivos son capaces de almacenar una simple línea de datos en 8 retenedores direccionables y también puede funcionar como un decodificador de 3 a 8 o bien como demultiplexor, con salidas activadas en alto.
El 74HCT259 posee 4 modos de operación:
Tabla 3-2 .- Modos de Operación 74HCT259
Los cuales deben ser seleccionados a través de las terminales LE y MR. En el modo de “addressable latch” o retenedor direccionable, el dato sobre la línea de
datos (D) es puesto en el retenedor que se direccionó, éste, seguirá al dato de entrada junto con todos los retenedores que no se direccionaron, quedando en su estado previo.
En el modo de memoria, todos los retenedores se quedan en su estado previo y no son afectados por el dato o las direcciones de entrada.
En el modo de decodificador o demultiplexor de 3 a 8 la salida que se direccionó, seguirá el estado de la D con todas las demás salidas en estado bajo.
En el modo reset, todas las salidas están en estado bajo y no son afectadas por las direcciones o la entrada D.
Hay que tomar precauciones cuando se maneja el dispositivo en el modo de retenedor
direccionable, pues si se cambia más de un bit de dirección, se puede ocasionar un error en la transición de dirección. Por otra parte, esto puede ser hecho en el modo de memoria.

37
Tabla 3-3 .- Tabla de Función 74HCT259

38
3.3 ISD El ISD posee 4 bits de control SCLK, MOSI, MISO Y SS, variables que son
controlados mediante una interfase periférica serial (SPI) y que permite controlar y direccional las funciones del ISD. El ISD esta configurado para operar como un dispositivo periférico esclavo mediante la interfase SPI del microcontrolador que controlará la lectura y escritura del dispositivo
El ISD tiene la capacidad de reproducir uno o varios mensajes dependiendo de la
información enviada a través del SPI. Para motivos de programación es necesario tomar en cuenta los siguientes aspectos del
ISD. 1. El comienzo de la transmisión serial comenzará en el flanco de bajada del bit SS. 2. SS se mantiene bajo en la comunicación serial y en alto entre las instrucciones. 3. Mientras el dato de interrupción es enviado a través del MISO, los datos de control
y direccionamiento son recibidos simultáneamente a través de MOSI. 4. Una operación comienza con el bit RUN puesto a 1 y termina con el bit RUN puesto
a 0. 5. Todas las operaciones comienzan después del flanco de subida del SS. 6. El ISD se programa con 11 bits de direccionamiento y 5 bits de control, a través de
instrucciones específicas.
Tabla 3-4 .- Código de programación del ISD

39
Los bits de direccionamiento del ISD A0…A10 especifican la dirección del mensaje a reproducir o grabar y al igual que los bits de control C0…C4 son enviados mediante SPI a través de MOSI, en los cuales se atribuye un número del 00000 al 11111 a cada instrucción y poder, así, establecer un código de programación con el ISD. Los bits de control nos permitirán elegir:
1. POWER UP 2. SETPLAY 3. PLAY 4. SETREC 5. REC 6. SETMC 7. MC 8. STOP 9. STOPPWRDN 10. RIN
Cada operación enviada como EOM u OVF activa una interrupción dentro del ISD lo
cual representa que el mensaje ha terminado, EOM, o que ha ocurrido un desbordamiento de memoria, información transmitida a través de MISO y que desactivará las funciones que estén siendo procesadas en MOSI.
Se debe tener cierta cautela a la hora de enviar MOSI, pues al no existir una
correspondencia lógica entre la tarea enviada y la ejecución anterior del MOSI, puede existir una coalición de información como sería el caso de ejecutar y parar al mismo tiempo una operación de grabación o reproducción de mensaje.
Los bits de control deben seguir una rutina de activación, tanto para grabación como
para reproducción, que cumpla con valores binarios específicos y tiempos de espera necesarios pues la omisión de estos requisitos impediría cualquiera de las tareas programadas en el ISD.
Las secuencias recomendadas para el funcionamiento adecuado de las operaciones de
reproducción y grabado de mensajes es la siguiente: Secuencia para grabación de mensajes.
1. Activar C2. 2. Esperar 25 milisegundos 3. Activar C2. 4. Esperar 50 milisegundos. 5. Activar C3 y C4 (00101, instrucción SETREC). 6. Activar C1, C2 y C4 (01101, instrucción REC). 7. Activar C1 y C2 (01100, instrucción STOP) 8. Esperar a recibir T parada/pausa.

40
Cuando se activa la instrucción SETREC, se debe tomar en cuenta el envió de la dirección en la cual se grabará la información, A0…A10, de las cuales se utilizará una al tiempo y, por lo consiguiente, no existirán reproducción ni grabaciones simultáneas en los diferentes canales o direcciones de almacenamiento existentes en el ISD.
Secuencia para reproducción de mensajes.
1. Activar C2. 2. Esperar 25 milisegundos. 3. Activar C2, C3 y C4 (00111, instrucción SETPLAY). 4. Activar C1, C2, C3 y C4 (01111, instrucción PLAY) 5. Activar C1 y C2 (01100, instrucción STOP) 6. Esperar el envío de EOM u OVF. 7. Esperar a recibir T parada/pausa.
Es importante aclarar que el EOM (end of message) se dará de forma automática al no
existir más contenido dentro del mensaje y que OVF (over flor) ocurrirá al llegar al límite de la capacidad de grabación. La capacidad estará en función del tipo de dispositivo implementado, en el caso del ISD 4003-04M la duración máxima existente en una sola dirección o en todas las dirección será de 4 minutos, a una velocidad de muestreo de 8.0 kHz. y un reloj de 1024 kHz.
Cuando sea activada la instrucción SETPLAY, se debe especificar el mensaje que se
desea reproducir mediante el envío de la dirección correspondiente y previamente establecida al momento de la grabación en A0…A10.
Ilustración 3-1.- Diagrama de Tiempos ISD
La comunicación SPI y la correcta configuración y activación del ISD nos dan una
certeza del funcionamiento, sin embargo existen requerimientos de entrada y salida que no podrán ser omitidos pues de ellos dependerá la grabación o reproducción adecuada de los mensajes contenidos en el ISD.

41
El ISD posee dos entradas analógicas de entrada, una simple, utilizando ANA +, y otra diferencial, utilizando ANA + Y ANA -, como se muestra en la figura:
Ilustración 3-2 .- Modo ANA + Y ANA -
Como es de observarse en el modo simple, la señal de entrada debe tener 32 m Vp-p y
en el modo diferencial deberán existir 16 m Vp-p por entrada, con un defasamiento de 180º. En conclusión, el ISD en sus entradas analógicas solamente pude recibir señales menores a los 32 m Vp-p y la nitidez de los mensajes dependerá de la calidad de la señal de entrada, junto con la frecuencia de muestreo deseada.
El ISD ofrece frecuencias de muestreo de 8.0, 6.4, 5.3 y 4 Khz., obteniendo una mejor calidad de sonido ante una frecuencia mayor de muestreo; pero al obtener una mayor calidad de sonido, se obtiene también un mensaje con mayor información que reduce automáticamente el espacio brindado por el ISD en cualquiera de sus modelos, datos que deben ser considerados y que obligan al programador a tomar en cuenta la siguiente tabla:
Tabla 3-5 .- Tipos de ISD

42
En la tabla anterior se observa una columna con datos de un filtro pasa banda típico, el cual representa – 3 dB, sin embargo, este valor debe ser calculado a las necesidades del sistema, por lo que es conveniente no tomarlo como un dato 100% válido en el diseño del circuito para la grabación de los mensajes.
Analizando y tomando en cuenta todos los aspectos necesarios para la optimización de
las funciones del ISD 4003, el análisis de la lógica de programación se reduce simplemente a tomar en cuenta los tiempos necesitados por el ISD para activar o desactivar la grabación o reproducción de los mensajes y se tiene lo siguiente.
Ilustración 3-3.- Formato del comando de 8 bits
Ilustración 3-4 .- Ciclo de grabado, reproducción y paro.
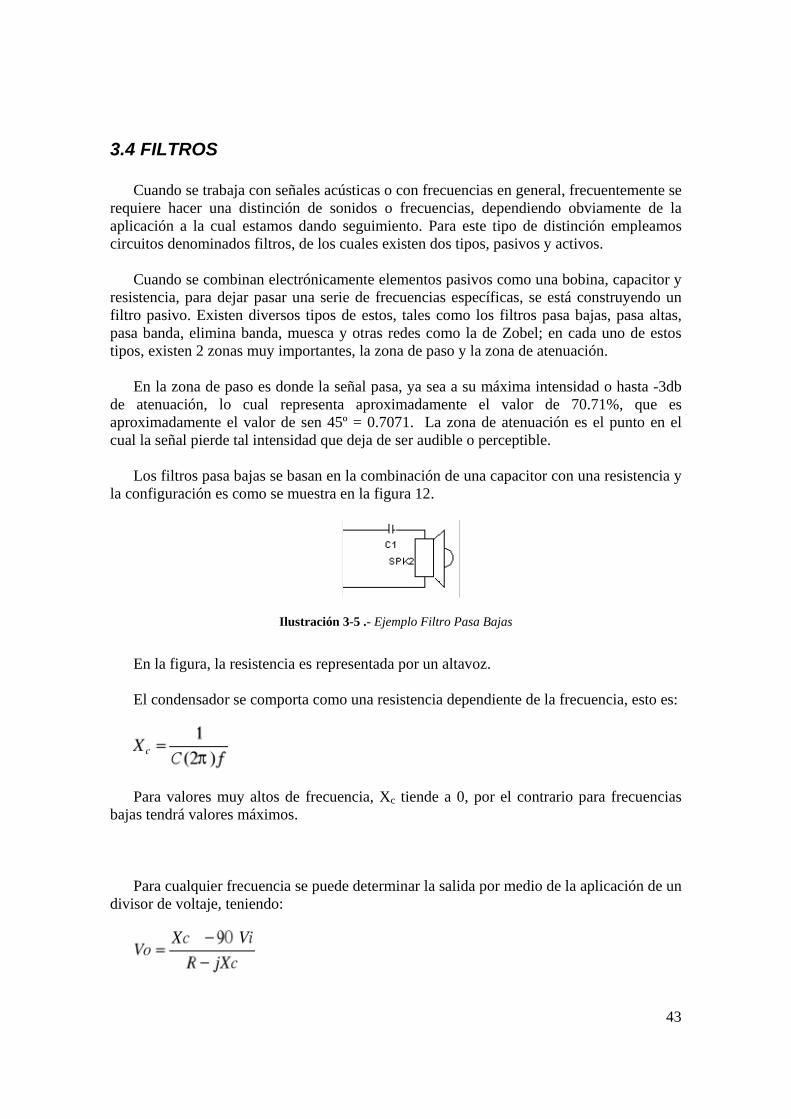
43
3.4 FILTROS Cuando se trabaja con señales acústicas o con frecuencias en general, frecuentemente se
requiere hacer una distinción de sonidos o frecuencias, dependiendo obviamente de la aplicación a la cual estamos dando seguimiento. Para este tipo de distinción empleamos circuitos denominados filtros, de los cuales existen dos tipos, pasivos y activos.
Cuando se combinan electrónicamente elementos pasivos como una bobina, capacitor y
resistencia, para dejar pasar una serie de frecuencias específicas, se está construyendo un filtro pasivo. Existen diversos tipos de estos, tales como los filtros pasa bajas, pasa altas, pasa banda, elimina banda, muesca y otras redes como la de Zobel; en cada uno de estos tipos, existen 2 zonas muy importantes, la zona de paso y la zona de atenuación.
En la zona de paso es donde la señal pasa, ya sea a su máxima intensidad o hasta -3db
de atenuación, lo cual representa aproximadamente el valor de 70.71%, que es aproximadamente el valor de sen 45º = 0.7071. La zona de atenuación es el punto en el cual la señal pierde tal intensidad que deja de ser audible o perceptible.
Los filtros pasa bajas se basan en la combinación de una capacitor con una resistencia y
la configuración es como se muestra en la figura 12.
Ilustración 3-5 .- Ejemplo Filtro Pasa Bajas
En la figura, la resistencia es representada por un altavoz. El condensador se comporta como una resistencia dependiente de la frecuencia, esto es:
Para valores muy altos de frecuencia, Xc tiende a 0, por el contrario para frecuencias
bajas tendrá valores máximos. Para cualquier frecuencia se puede determinar la salida por medio de la aplicación de un
divisor de voltaje, teniendo:
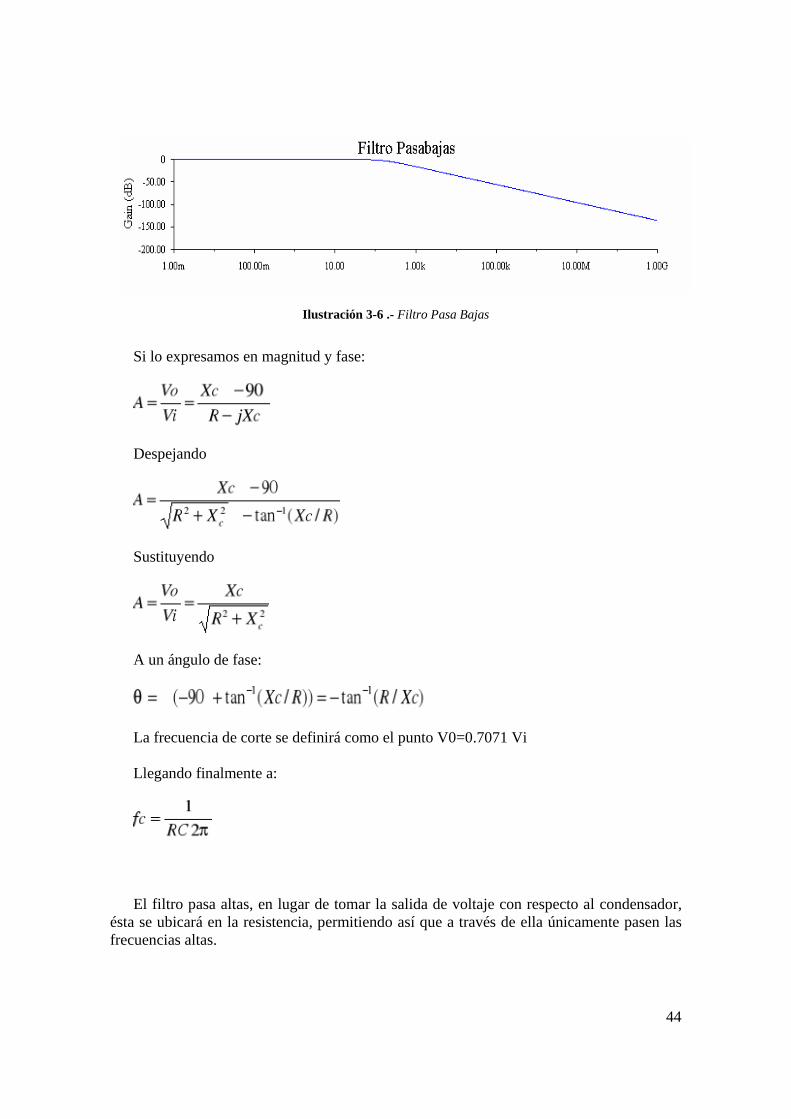
44
Ilustración 3-6 .- Filtro Pasa Bajas
Si lo expresamos en magnitud y fase:
Despejando
Sustituyendo
A un ángulo de fase:
La frecuencia de corte se definirá como el punto V0=0.7071 Vi Llegando finalmente a:
El filtro pasa altas, en lugar de tomar la salida de voltaje con respecto al condensador,
ésta se ubicará en la resistencia, permitiendo así que a través de ella únicamente pasen las frecuencias altas.

45
Cuando las frecuencias son muy bajas, la caída de tensión se presenta casi en su totalidad en el condensador, habiendo un voltaje muy bajo en la resistencia, por el contrario, cuando la tensión en el condensador sea tan pequeña, será porque la mayor parte de ésta tensión está siendo consumida en la resistencia, tal como se muestra en la figura.
Ilustración 3-7 .- Filtro Pasa Altas
La frecuencia de corte, será determinada a través de la siguiente fórmula:
Al implementar simultáneamente un filtro pasa bajas y un pasa altas, conectados en
cascada, determinamos cualidades de un filtro pasa banda, tomando siempre en cuenta que la frecuencia de corte del filtro pasa altas sea menor a la del filtro pasa bajas.
Ilustración 3-8 .- Ejemplo Filtro Pasa Banda
La parte interesante de este circuito y en si de éste tipo de filtros es el ancho de banda que dejaremos pasar, y que será determinada a través de la resta de las frecuencias de corte de cada uno de los filtros por separado.
El detalle y la aplicación de estos filtros en el proyecto del módulo de los sentidos es el que debemos hacer distinción de las frecuencias para los altavoces que utilizaremos ya que no existe ningún tipo de estos que reproduzca correctamente todo el rango de frecuencias audibles.

46
Ilustración 3-9 .- Filtro Pasa Banda
Los filtro activos, tienen la misma función que los pasivos, simplemente que estos utilizan elementos activos como lo son los Amplificadores Operacionales y los Transistores. Existen diferentes configuraciones para estos que son las mismas que para los pasivos.
1. Filtro pasa altos (HIPASS). Circuito y Bode.
Ilustración 3-10 .- HIPASS y Bode
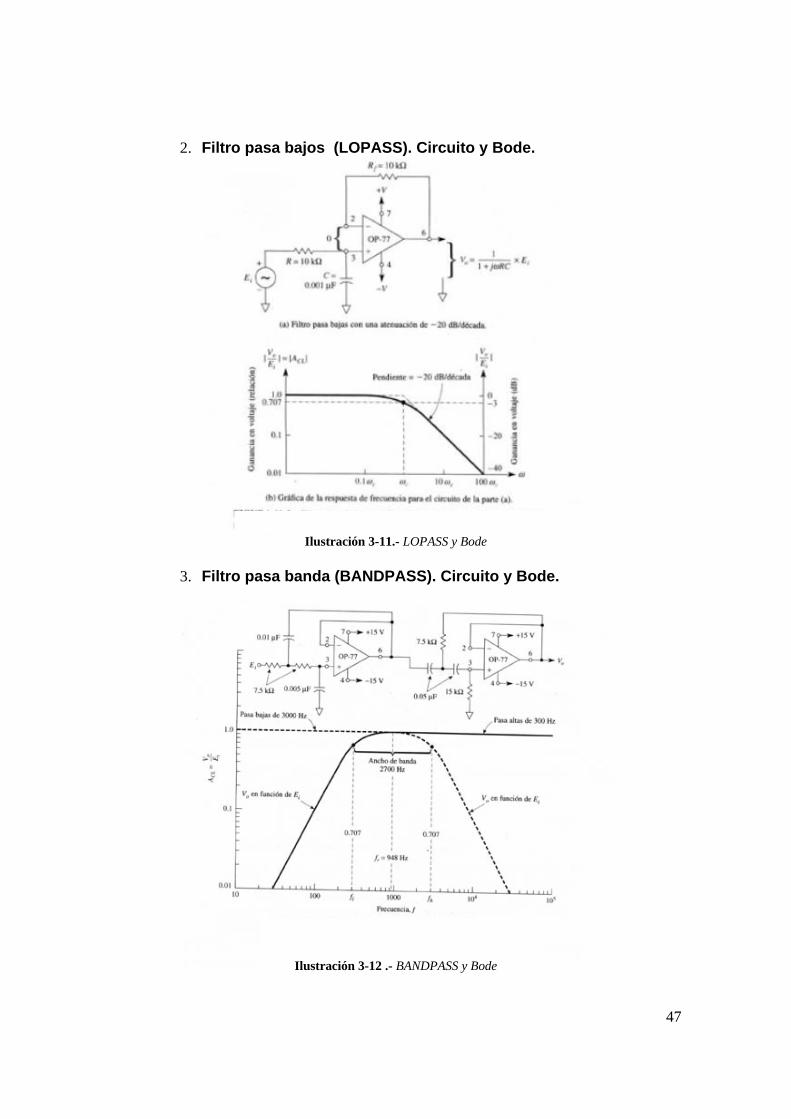
47
2. Filtro pasa bajos (LOPASS). Circuito y Bode.
Ilustración 3-11.- LOPASS y Bode
3. Filtro pasa banda (BANDPASS). Circuito y Bode.
Ilustración 3-12 .- BANDPASS y Bode

48
4. Filtro pasa banda resonante o de banda angosta (BANDPASS). Bode y circuito
Ilustración 3-13 .- BANDPASS resonante y Bode.
5. Filtro de banda eliminada (BANDREJ) o filtro de muesca. Bode y circuito
Ilustración 3-14.- BANDREJ y Bode

49
Ilustración 3-15 .- Ejemplo Con Filtro y Pasa Banda
Para nuestro caso, utilizaremos un filtro pasivo antes de la amplificación de la señal, y
un filtro activo para la comparación que existirá en el Atenuador de sonido. Los circuitos se expresan de la siguiente forma:
Ilustración 3-16 .- Filtro Pasivo en Diseño
Con el objetivo de eliminar el ruido, utilizaremos un filtro pasa bajas, pretendiendo una
frecuencia de corte de 160 Hz, esto es: Si, R = 10 k ohms.
nfnfCdosustituyen
RfC
despejando
RCf
c
c
10099
21
21
≈=
=
=
π
π
Valor comercial del condensador. De igual forma, el filtro activo empleado a la entrada del atenuador, limpia la señal de
las frecuencias altas.

50
Ilustración 3-17 .- Filtro Activo en Diseño
RCjA
respuestaC
R
fCRC
ERCj
V
CL ω
ω
πω
ω
+=
=
==
+=
11
1
21
*1
10

51
3.5 ATENUADOR DE AUDIO LM 1971 Este dispositivo es un atenuador digital de audio fabricado con tecnología CMOS que
puede ser controlado mediante un microcontrolador. Posee las características de atenuar señales de 0 a – 62 dB en pasos de 1dB, además de poder desconectar la señal de entrada de la salida del dispositivo brindando una atenuación sobre los 100 dB en la opción de silencio.
Una de las principales habilidades es la capacidad de elaborar cambios en los niveles de atenuación en ausencia de “clicks” o “pops”; aunado a esto se brinda una distorsión armónica total THD de 0.0008% y un rango dinámico de 115 dB.
El control de éste dispositivo se logra a través de 3 terminales que son DATA, CLOCK y LOAD mediante una comunicación serial que se compone de 8 bits direccionables los cuales siempre deben de ser fijados a 0000 0000 para seleccionar un solo canal de audio y 8 bits para la configuración de la atenuación. Para cada uno de estos datos de configuración el MSB es enviado primero con los datos de direccionamiento precedidos de los datos de atenuación.
LOAD debe de ir a un estado bajo 150 ns antes de que suceda el primer filo de subida de CLOCK y deberá permanecer así durante toda la transmisión.
Para el correcto funcionamiento de este dispositivo es necesaria una interfase digital que permita intercambiar los datos, retenerlos y decodificarlos. Una vez que el nuevo dato sea completamente intercambiado en la terminal DATA, la terminal LOAD debe regresar a un estado alto, tal como se muestra en la figura.
Ilustración 3-18 .- Función Atenuador
52
En nuestro caso, la etapa de codificación y decodificación es llevada a cabo por el Multiplexor, que recibirá la señal emitida en las terminales RA0, RA1, RA2, RA3 Y RA4, con el objeto de enviar la señal LOAD perteneciente a cada uno de los atenuadores, que obviamente son equivalentes al número de canales.
Una vez cumplidos los tiempos de activación de LOAD y CLOCK, a través de la terminal RD0, se enviarán de forma serial las tramas de BYTE 1 y BYTE 0, que al ser procesadas por el atenuador dará las características de nivel de sonido elegido por el usuario. Como nota importante y quizás crucial en el correcto funcionamiento del programa es el hecho de que los datos serán recibidos por el atenuador, siempre en el filo de subida, siempre y cuando los tiempos del reloj no rebasen los tiempos descritos en la figura anterior.
Independientemente del circuito que se elija de operación, es muy importante tener conciencia en que sin la existencia de un voltaje de referencia adecuado, el atenuador no podrá operar adecuadamente. Según el fabricante, éste deberá ser aproximadamente la mitad de VDD.

53
4. CABLEADO ESTRUCTURADO Y TRANSMISIÓN DE DATOS. De manera fundamental, para poder cerrar adecuadamente la interacción existente entre
las tarjetas de control, sensores y actuadores es pertinente hacer referencia a toda la normatividad existente, además de los cálculos apropiados para el conocimiento de las longitudes de cableado que nos den el mejor rendimiento y eviten a lo máximo señales no deseadas, “ruido”, que proporcionen datos erróneos al momento de procesar la información en el microcontrolador.
4. 1 TRANSMISIÓN DE DATOS El estándar TIA/EIA 568 especifica que la Categoría 5 de cable es más adecuada para
transmitir datos a frecuencia de hasta 100 MHz. y basándonos en éste, la transmisión de datos a lo largo del recinto será manejada con un UTP categoría 5.
Diversos parámetros deben ser tomados en cuenta para efectos de certificación de nuestra red de transmisión:
• CABLEADO (wiremap) • RETARDO DE PROPAGACIÓN (propagación y retardo del delay). • PÉRDIDA DE RETORNO • DIAFONÍA. • SNR. • SUMA DE POTENCIA.
El CABLEADO se refiere directamente al par trenzado, a la manera adecuada del
enlazamiento que debe existir en los cables con la finalidad de transmitir a frecuencias altas con la integridad apropiada, fidelidad, y libertad de la interferencia electromagnética.
Ilustración 4-1 .- Norma T568B
El RETARDO DE PROPAGACIÓN hace referencia al tiempo de defasamiento existente en la información una vez realizado el recorrido a través de la línea de
54
transmisión. El UTP posee 4 líneas de transmisión, entre las cuales existe una variación mínima de longitud que depende directamente del tipo de trenzado, lo cual no influirá considerablemente en el cálculo del retardo de propagación, conocido también como Measured Time Delay.
Los electrones viajan aproximadamente a una velocidad constante de 0.2 m/ns, determinado por la velocidad nominal de propagación NVP, multiplicada por la velocidad de la luz y que en el caso del UTP categoría 5, el NVP es de un 69%.
Una vez conocidos estos parámetros, es posible calcular la longitud óptima de operación de un tendido de cable:
2CNVPeDelayMeasureTimL ∗∗
=
Donde C es la velocidad de la luz en el vacío y es igual a sme /3 8 , NVP = 0.67 Como es de suponerse, el cálculo de tiempo de retardo es muy variante y eso complica
el cálculo, debido a esto, la norma ha establecido que el tendido máximo que debe existir para el UTP categoría 5 es de 90 metros máximos y 4 metros más de tendido hacia un dispositivo.
De esta longitud dependerán directamente la atenuación y la pérdida de información existente en la línea de transmisión y parámetros como la diafonía (crosstalk), NEXT (near and crosstalk), FEXT (far end crosstalk), EMI (electromagnetic interference), SNR (signal to ónice ratio), ACR (attenuation and crosstalk ratio), ELFEXT (equal level far and crosstalk), RL (return lost) y TDR (time domine reflectometry). Aunado al cálculo adecuado de la longitud del cable, cualquier torcedura que altere la conformación del par trenzado afecta de igual forma a todos los parámetros de una red de transmisión de datos certificada.
En el proyecto se han utilizado múltiplos de 9 hacia cualquier longitud menor a los 10 segmentos y los resultados han sido favorables.
4. 2 TRANSMISIÓN DE SONIDO En un sistema de transmisión de audio, el cable representa una carga, una impedancia
que se opone a la corriente eléctrica en función de la frecuencia. La impedancia del cable es directamente proporcional a su longitud e inversamente proporcional a su sección, es decir, que entre más grueso sea el cable menor será su impedancia, de ahí que un factor de suma importancia, por encima de la capacitancia o la inductancia que se pueda generar a lo largo de un cable es el calibre que se utilice.
La impedancia del cable se suma a la impedancia proporcionada por los altavoces y así, junto con la impedancia proporcionada por el amplificador podremos calcular la relación existente entre la impedancia de entrada con respecto a la impedancia de salida, obteniendo así el factor de amortiguamiento.
Este factor de amortiguamiento en un amplificador, sirve para controlar el movimiento de la bobina de un altavoz y se recomienda que no sea mayor de 50 y menor de 25 puntos.

55
cablesalida
in
ZZZ
AF+
=..
Haciendo una simulación de una carga de 4 ohms y un cable del número 14, amplificador con un amortiguamiento de 400 a 8 ohms, tendríamos la siguiente tabla comparativa:
Tabla 4-1 .- Amortiguamiento e Impedancia vs Longitud Es decir, a medida que la impedancia del cable aumenta con respecto a la impedancia
de salida del amplificador, el factor de amortiguamiento va disminuyendo de valor. Además de la influencia ejercida por el calibre del cable en el factor de
amortiguamiento, éste afecta considerablemente en la pérdida de potencia del amplificador y entre menos potencia sea sacrificada a lo largo de la línea se obtendrán mejores resultados en el funcionamiento del sistema.
Retomando el ejemplo anterior:
Longitud del cable
(Mts.)
Pérdida energía en el
cable
Pérdida de nivel
5 1% -0.1 dB
10 2% -0.2 dB
20 4% -0.4 dB
50 9% -0.9 dB
Tabla 4-2 .- Pérdida de energía y nivel vs. Longitud
Si tomamos en cuenta la atenuación a lo largo de la línea y los factores antes descritos podemos obtener una tabla en el que se contemplen diferentes longitudes y secciones del cable y así poder elegir cuál dará mejor funcionamiento a nuestro sistema.
Longitud del cable
(Mts.)
Factor de amortiguamiento
resultante
Impedancia del cable (ohms)
5 78 0.08 ohm
10 43 0.17 ohm
20 23 0.33 ohm
50 15 0.83 ohm

56
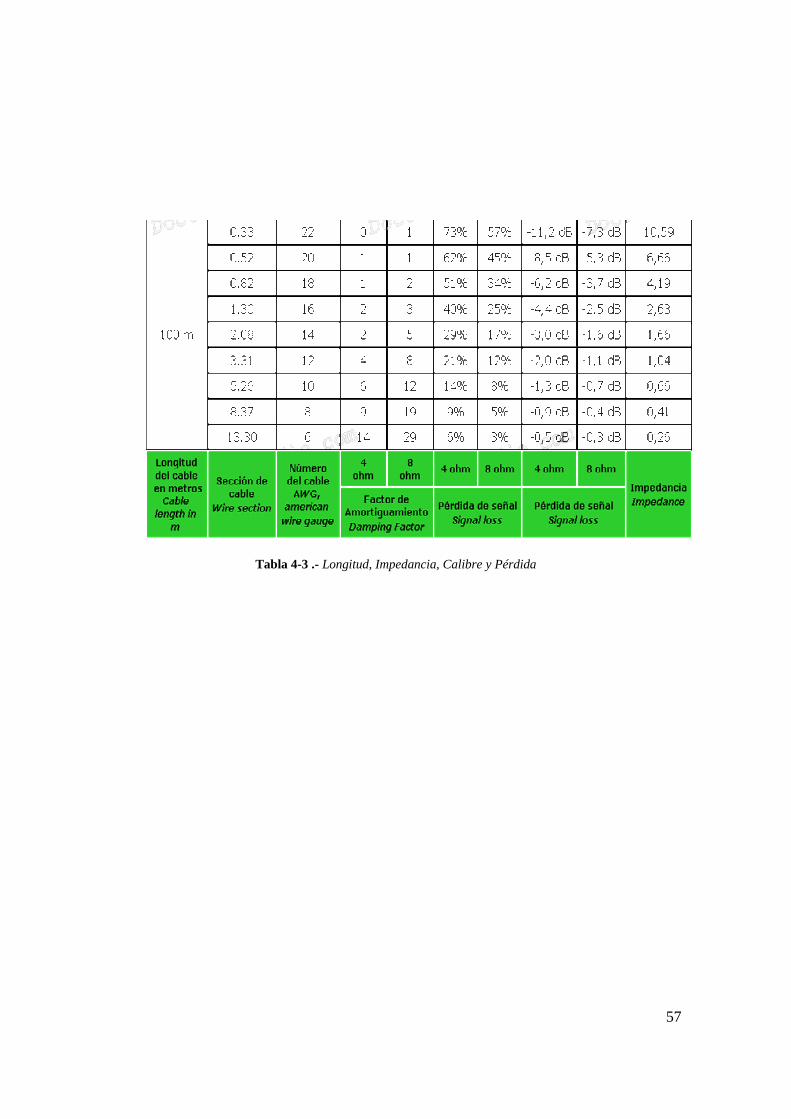
57
Tabla 4-3 .- Longitud, Impedancia, Calibre y Pérdida
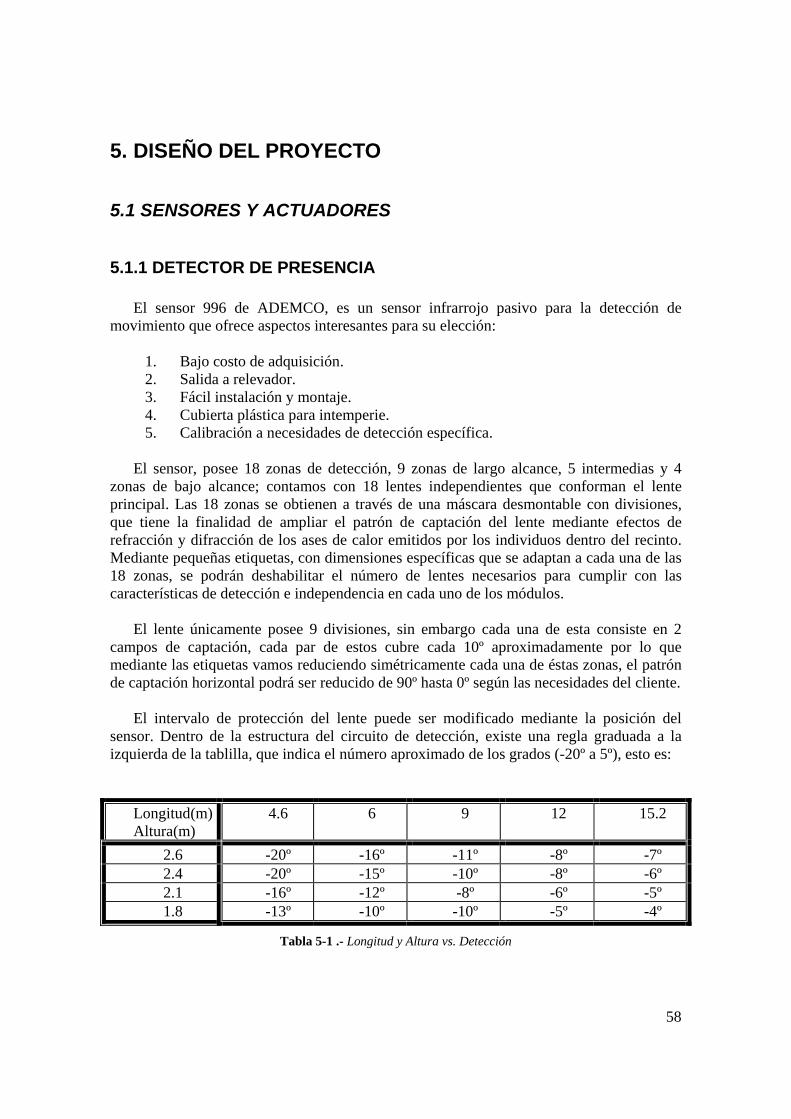
58
5. DISEÑO DEL PROYECTO
5.1 SENSORES Y ACTUADORES
5.1.1 DETECTOR DE PRESENCIA El sensor 996 de ADEMCO, es un sensor infrarrojo pasivo para la detección de
movimiento que ofrece aspectos interesantes para su elección:
1. Bajo costo de adquisición. 2. Salida a relevador. 3. Fácil instalación y montaje. 4. Cubierta plástica para intemperie. 5. Calibración a necesidades de detección específica.
El sensor, posee 18 zonas de detección, 9 zonas de largo alcance, 5 intermedias y 4
zonas de bajo alcance; contamos con 18 lentes independientes que conforman el lente principal. Las 18 zonas se obtienen a través de una máscara desmontable con divisiones, que tiene la finalidad de ampliar el patrón de captación del lente mediante efectos de refracción y difracción de los ases de calor emitidos por los individuos dentro del recinto. Mediante pequeñas etiquetas, con dimensiones específicas que se adaptan a cada una de las 18 zonas, se podrán deshabilitar el número de lentes necesarios para cumplir con las características de detección e independencia en cada uno de los módulos.
El lente únicamente posee 9 divisiones, sin embargo cada una de esta consiste en 2
campos de captación, cada par de estos cubre cada 10º aproximadamente por lo que mediante las etiquetas vamos reduciendo simétricamente cada una de éstas zonas, el patrón de captación horizontal podrá ser reducido de 90º hasta 0º según las necesidades del cliente.
El intervalo de protección del lente puede ser modificado mediante la posición del
sensor. Dentro de la estructura del circuito de detección, existe una regla graduada a la izquierda de la tablilla, que indica el número aproximado de los grados (-20º a 5º), esto es:
Longitud(m) Altura(m)
4.6 6 9 12 15.2
2.6 -20º -16º -11º -8º -7º 2.4 -20º -15º -10º -8º -6º 2.1 -16º -12º -8º -6º -5º 1.8 -13º -10º -10º -5º -4º
Tabla 5-1 .- Longitud y Altura vs. Detección

59
Ilustración 5-1 .- Características Sensor de Presencia
Un punto importante en la elección de los dispositivos de detección es que dada la
naturaleza de los sensores infrarrojos, pueden ser activados por rayos solares o por diferentes fuentes de calor, como lo puede ser el sol, fuego, o diversos objetos que irradien calor. Esto nos lleva a anexar etapas de filtración de señal, una de ellas es polarizando el lente de detección y otra es ajustarlo a la recepción y emisión de una frecuencia específica y así lograr discriminar la frecuencia de los rayos solares o de fuentes de emisión diferentes.
En este caso, el sensor de detección poseído en el 996 de ADEMCO, tienen la
capacidad de detectar fuentes de calor generadas por los individuos, por lo que es sensible a cambios bruscos de temperatura, lo cual se reflejaría en una disminución del rendimiento de detección.
Internamente el 996 posee 4 terminales, 2 de ellas recibirán +12 y -12 V, las otras dos
terminales pertenecen al relevador que se encuentra Normalmente Cerrado (NC); en una de ellas se conectará el negativo y en otra el positivo +5 V.
Básicamente el funcionamiento se describe de la siguiente manera: La calibración del sensor nos dará opciones de alcance con base a la altura en la cual se
ha colocado el sensor, que, en conjunto con la posición marcada en grados por la calibración previa del circuito detector, determinará la sensibilidad de detección. Los pasillos poseen 2.15 mts. de ancho y no podemos exceder ese límite de captación pues podríamos infiltrarnos en el patrón de captación de otro sensor. Los sensores han sido ubicados a 0.70m de altura con respecto al suelo y necesitamos únicamente 2.15 m de captación a lo largo del pasillo.

60
La siguiente tabla se ha realizado aplicando el Teorema de Pitágoras, con el efecto de encontrar una similitud con los valores de la tabla y los valores necesitados para la captación adecuada.
TABLA SENSOR º CO/H º
-20 35 -16 30 -15 25 -12 20 -11 18 -10 15 -8 13 -6 10 -5 9 -4 7
Tabla 5-2 .- Normalización de calibración
Sen θ =0.70/2.15 θ=21.11º Que corresponde al valor de -11º especificados por el fabricante. Con efecto de disminuir el patrón de captación y limitar únicamente a la zona
correspondiente a cada módulo, 12 de las 18 zonas han sido deshabilitadas mediante el uso de las etiquetas obteniendo un patrón de captación horizontal de 30º.
Por medio de esta calibración se pretende obtener un sensor que únicamente detecte la
presencia de la persona cuando esta se encuentre de frente al sensor, sin embargo deberemos de mover la ubicación de la regla del circuito detector para que de esta forma forzar a que únicamente las personas que se encuentren a 2.15 m del sensor sean captadas.
A pesar de que se tomen en cuenta las características necesarias del sistema, alguna
variante de temperatura, humedad, presión, etc., podrán modificar las características de captación del sensor y aunque éste contenga estándares de calidad determinados para funcionar aproximadamente 10 años, los factores mencionados podrían mermar el funcionamiento de éste. Es importante mencionar que el dispositivo únicamente funcionará con la alimentación AC especificada que es de 10 a 16 VDC a 16mA.
Cuando el sensor es energizado, hay un periodo de 2 minutos de calentamiento con
efectos de generar un auto análisis de funcionamiento, el cual deberá de realizarse en ausencia de personas en todo el patrón de captación del dispositivo; dicho calentamiento hará que el sensor se encuentre activado por lo tanto el relevador pasará de la posición NC a la posición NA lo que se reflejará en nuestro circuito como un pulso de +5 V. mientras no haya modificaciones en la detección de las personas el sensor envía a todo momento negativo a las terminales receptoras de la tarjeta de control.

61
Detector Relevador Alimentación
Ilustración 5-2 .- Diagrama de tiempos sensor
Como se observar en el diagrama de tiempos, cuando el sistema es inicializados el
detector y el relevador se activaran aproximadamente 2 minutos, posteriormente cuando el detector se active, existirá un pequeño retraso en la activación del relevador, sin embargo cuando la señal del detector se desactive, el relevador volverá a su estado NC.
La característica de activación del relevador reduce ampliamente la dificultad del
problema pues de haber elegido algún otro sensor detector de movimiento que enviara un valor determinado en Voltios dependiendo de la cantidad de personas que se encontraran de frente a éste, se hubiese tenido que adaptar una etapa de disparador schmith, con el efecto de enviar siempre 1 o 0 y no generar confusión por la inestabilidad de los datos de entrada, sin embargo, para otro tipo de necesidades un sensor con esas cualidades hubiese permitido no solamente el control de la detección sino también, por medio de fórmulas estadísticas, el conocimiento aproximado del número de personas que activan el dispositivo en ese momento.
Como se planteó al inicio de este trabajo, la interacción existente entre la tarjeta de
reproducción de cuñas y la tarjeta de control es fundamental, en caso de no existir una comunicación adecuada entre estas, el proceso definido por las necesidades planteadas se vería truncado y aunque existiese una lógica adecuada en cuanto a la solución del problema en particular, solamente obtendríamos un proceso de control optimizado, al respetar y cumplir con los tiempos de programación necesitados por cada una de los dispositivos.
Los tiempos necesitados por el ISD, MUX, LATCH y del mismo microcontrolador para
ejecutar de manera adecuada sus tareas, deberán estar sincronizados al máximo pues de ello depende que los tiempos de barrido, en cada uno de los procesos, aminoren la sensibilidad de detección de secuencia que, en este caso en particular, es directamente proporcional a los tiempos utilizados en cada una de las rutinas de programación.
Debido a las características de los sensores utilizados, los tiempos de detección no se
ven afectados por cuestiones externas o, más bien dicho, por los tiempos de activación o desactivación empleados por el sensor. Existe una calibración previa con el objeto de obtener la sensibilidad idónea que, dadas las condiciones del recinto, evite que los sensores de una zona interactúen con los de otra, reflejándose en reproducciones de mensajes fuera de tiempo y lugar.
Podría causar confusión que los sensores se elijan después de resolver el algoritmo de
programación pero cabe mencionar que las condiciones de diseño no siempre se adaptan de éstas forma, pues existirán ocasiones en las que solamente se pude trabajar con un

62
determinado tipo de dispositivos cuyas características deben ser tomadas en cuenta desde la creación del programa pues podrán contener características de activación específicas como en el caso del ISD, pero debido a las características de la velocidad de detección de secuencia podemos tener sensores pasivos de detección de movimiento con un tiempo de respuesta relativamente bajo, el cual no alterará el funcionamiento del dispositivo.
Cualquiera pensaría que podría ser un comentario reiterativo y quizás hasta un tanto
redundante, sin embargo, la elección de un sensor con un mayor tiempo de respuesta o de mayor calidad podría alterar el estado financiero del proyecto y restarle sustentabilidad al incrementarse la inversión necesaria para la solución del problema, o simplemente aumentar los tiempos de barrido del programa y aumentar así las zonas oscuras de programación.
5.1.2 ACTUADORES. Dadas las necesidades del sistema, los actuadores serán representados por 12 altavoces
colocados a los largo del recorrido junto con un par de sensores infrarrojos de movimiento pasivo, módulo que será denominado como módulo sensor-altavoz.
Los altavoces han sido escogidos de acuerdo a las necesidades planteadas por el
CONSEJO CÍVICO CULTURAL CINCO DE MAYO, de tal forma que son altavoces para intemperie, a 4 ohms y 20 Watts de potencia.
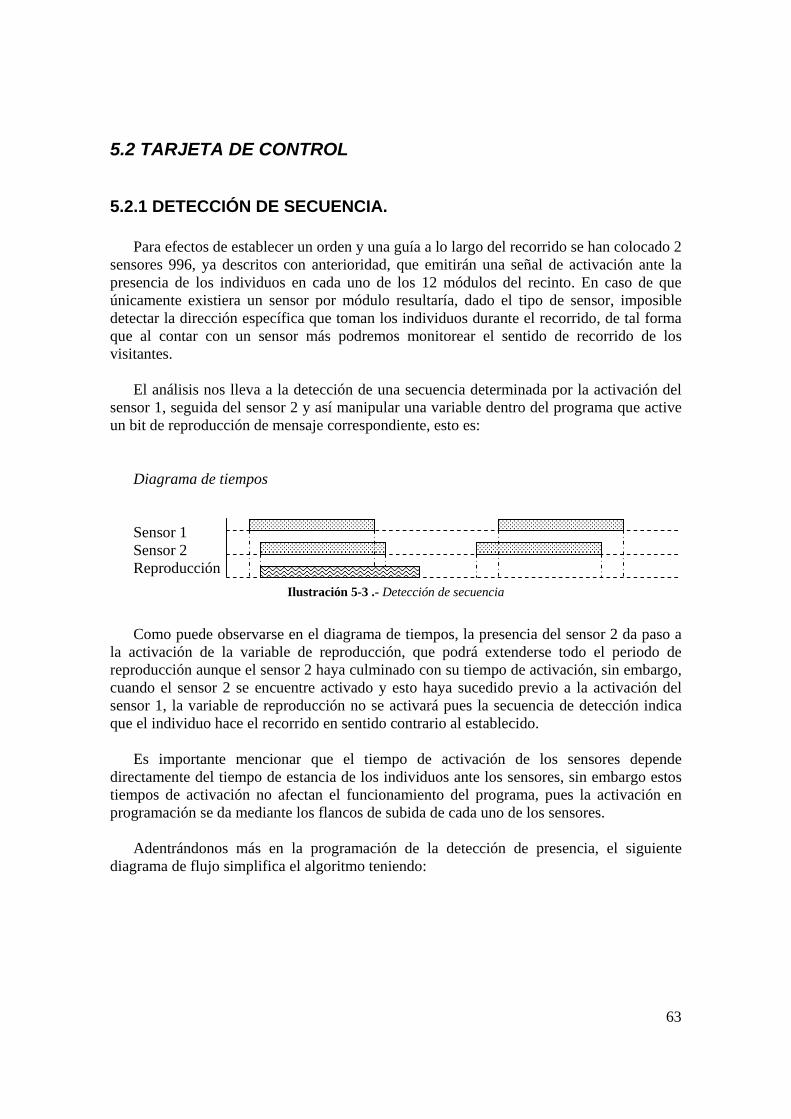
63
5.2 TARJETA DE CONTROL
5.2.1 DETECCIÓN DE SECUENCIA. Para efectos de establecer un orden y una guía a lo largo del recorrido se han colocado 2
sensores 996, ya descritos con anterioridad, que emitirán una señal de activación ante la presencia de los individuos en cada uno de los 12 módulos del recinto. En caso de que únicamente existiera un sensor por módulo resultaría, dado el tipo de sensor, imposible detectar la dirección específica que toman los individuos durante el recorrido, de tal forma que al contar con un sensor más podremos monitorear el sentido de recorrido de los visitantes.
El análisis nos lleva a la detección de una secuencia determinada por la activación del
sensor 1, seguida del sensor 2 y así manipular una variable dentro del programa que active un bit de reproducción de mensaje correspondiente, esto es:
Diagrama de tiempos Sensor 1 Sensor 2 Reproducción
Ilustración 5-3 .- Detección de secuencia
Como puede observarse en el diagrama de tiempos, la presencia del sensor 2 da paso a
la activación de la variable de reproducción, que podrá extenderse todo el periodo de reproducción aunque el sensor 2 haya culminado con su tiempo de activación, sin embargo, cuando el sensor 2 se encuentre activado y esto haya sucedido previo a la activación del sensor 1, la variable de reproducción no se activará pues la secuencia de detección indica que el individuo hace el recorrido en sentido contrario al establecido.
Es importante mencionar que el tiempo de activación de los sensores depende
directamente del tiempo de estancia de los individuos ante los sensores, sin embargo estos tiempos de activación no afectan el funcionamiento del programa, pues la activación en programación se da mediante los flancos de subida de cada uno de los sensores.
Adentrándonos más en la programación de la detección de presencia, el siguiente
diagrama de flujo simplifica el algoritmo teniendo:
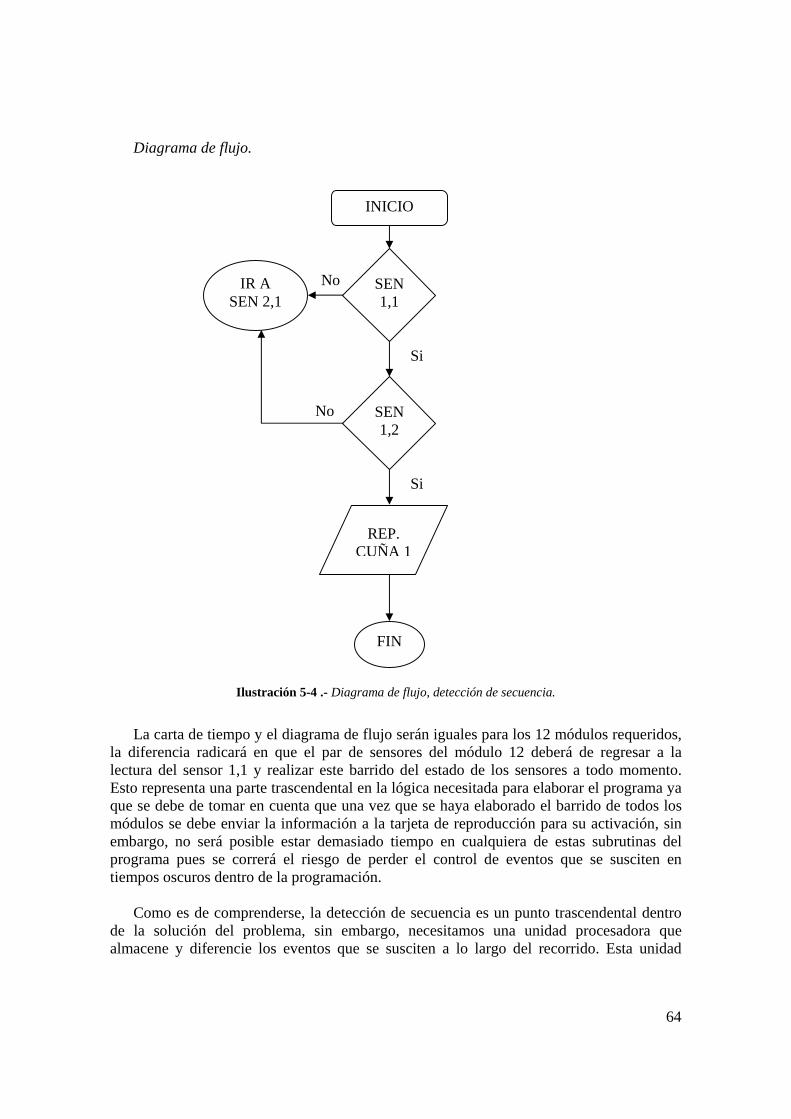
64
INICIO
SEN 1,1
IR A SEN 2,1
SEN 1,2
REP. CUÑA 1
FIN
Si
Si
No
No
Diagrama de flujo.
Ilustración 5-4 .- Diagrama de flujo, detección de secuencia.
La carta de tiempo y el diagrama de flujo serán iguales para los 12 módulos requeridos,
la diferencia radicará en que el par de sensores del módulo 12 deberá de regresar a la lectura del sensor 1,1 y realizar este barrido del estado de los sensores a todo momento. Esto representa una parte trascendental en la lógica necesitada para elaborar el programa ya que se debe de tomar en cuenta que una vez que se haya elaborado el barrido de todos los módulos se debe enviar la información a la tarjeta de reproducción para su activación, sin embargo, no será posible estar demasiado tiempo en cualquiera de estas subrutinas del programa pues se correrá el riesgo de perder el control de eventos que se susciten en tiempos oscuros dentro de la programación.
Como es de comprenderse, la detección de secuencia es un punto trascendental dentro
de la solución del problema, sin embargo, necesitamos una unidad procesadora que almacene y diferencie los eventos que se susciten a lo largo del recorrido. Esta unidad

65
procesadora también se dará a la tarea de cubrir características de volumen, activación de canales y desplegado en el LCD, tal cual se ha especificado al inicio de esta literatura.
El microcontrolador, unidad procesadora, como ya es de nuestro conocimiento posee
características específicas que lo limitan a un número de tareas determinadas por controlar y dependiendo del número de dispositivos que interaccionen con los puertos de entrada y salida de éste, será el número de microcontroladores que se utilizarán en el sistema. Debido a esto un microcontrolador se dará a la tarea de controlar el volumen, el estado de los canales y el desplegado de la información en el LCD, mientras que otro microcontrolador se avocará al control y monitoreo de la detección de secuencia.
Ya hemos dedicado un tema para el conocimiento necesario de los microcontroladores
y hemos profundizado en uno de los tantos existentes en el mercado que es el PIC 16F877 A; en lo consecutivo, muchos de los conceptos que fueron abordados se utilizarán sin más explicación por lo que sugerimos tener presente ante cualquier duda toda la información que se ha vertido con respecto a estos.
A continuación abordaremos a la configuración y programación del PIC dedicado a la
detección de secuencia.
5.2.2 PROCESAMIENTO Y ACTIVACIÓN DE VARIABLES. Como ya es de nuestro conocimiento, el PIC posee 4 puertos de entrada y salida (A, B,
C Y D), que pueden ser configurados de acuerdo a nuestras necesidades. El puerto A será utilizado para controlar el MUX1, el puerto D para controlar el MUX2, el puerto B para controlar el envío de información al LATCH y el puerto C para enviar señales de control en la reproducción de las cuñas mediante el SPI.
La finalidad del MUX en el sistema será la de obtener información de 12 dispositivos
diferentes con 5 señales de control; posee 16 bits de entrada, 4 bits de control que son enviados por el PIC y un bit de salida ante la correspondencia existente entre las señales de entrada y las señales de control, esto es: el PIC realizará un barrido desde el 0000 al 1111 (16 estados) y a su vez el MUX enviará un bit de activación (1) al PIC cada que cualquiera de las 16 entradas del MUX estén activadas y coincidan con el dato enviado por el PIC.
Para nuestras necesidades el MUX1 tendrá conectado a sus terminales los 12 primeros
sensores (SENSORA) de cada uno de los módulos y por lo consiguiente, el MUX2 tendrá conectado a sus terminales los 12 sensores correspondientes al SENSORB de cada uno de los módulos.
El siguiente diagrama de flujo explica el funcionamiento:

66
INICIO
BSF PORTA, 0 BSF PORTA,1 BCF PORTA,2 BSF PORTA,3
(1011=11)
PORTA,4=1
BSF PORTA, 0 BCF PORTA,1 BCF PORTA,2 BSF PORTA,3
(1010=10)
BSF SENS12, 1
BSF PORTA, 0 BCF PORTA,1 BCF PORTA,2 BSF PORTA,3
(1001=11)
PORTA,4=1
BCF PORTA, 0 BCF PORTA,1 BCF PORTA,2 BCF PORTA,3
(0000=00)
BSF SENS1, 1
FIN
Ilustración 5-5 .- Detección de secuencia en ASM
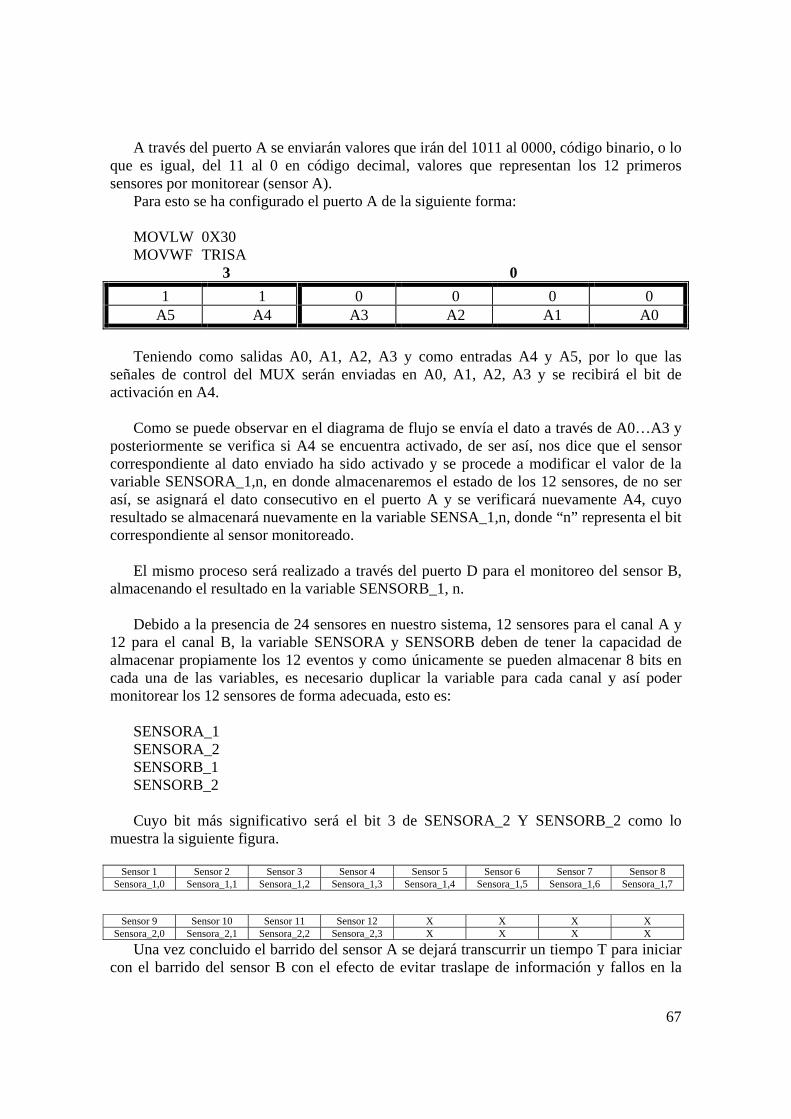
67
A través del puerto A se enviarán valores que irán del 1011 al 0000, código binario, o lo que es igual, del 11 al 0 en código decimal, valores que representan los 12 primeros sensores por monitorear (sensor A).
Para esto se ha configurado el puerto A de la siguiente forma: MOVLW 0X30 MOVWF TRISA 3 0
1 1 0 0 0 0 A5 A4 A3 A2 A1 A0
Teniendo como salidas A0, A1, A2, A3 y como entradas A4 y A5, por lo que las
señales de control del MUX serán enviadas en A0, A1, A2, A3 y se recibirá el bit de activación en A4.
Como se puede observar en el diagrama de flujo se envía el dato a través de A0…A3 y
posteriormente se verifica si A4 se encuentra activado, de ser así, nos dice que el sensor correspondiente al dato enviado ha sido activado y se procede a modificar el valor de la variable SENSORA_1,n, en donde almacenaremos el estado de los 12 sensores, de no ser así, se asignará el dato consecutivo en el puerto A y se verificará nuevamente A4, cuyo resultado se almacenará nuevamente en la variable SENSA_1,n, donde “n” representa el bit correspondiente al sensor monitoreado.
El mismo proceso será realizado a través del puerto D para el monitoreo del sensor B,
almacenando el resultado en la variable SENSORB_1, n. Debido a la presencia de 24 sensores en nuestro sistema, 12 sensores para el canal A y
12 para el canal B, la variable SENSORA y SENSORB deben de tener la capacidad de almacenar propiamente los 12 eventos y como únicamente se pueden almacenar 8 bits en cada una de las variables, es necesario duplicar la variable para cada canal y así poder monitorear los 12 sensores de forma adecuada, esto es:
SENSORA_1 SENSORA_2 SENSORB_1 SENSORB_2 Cuyo bit más significativo será el bit 3 de SENSORA_2 Y SENSORB_2 como lo
muestra la siguiente figura.
Sensor 1 Sensor 2 Sensor 3 Sensor 4 Sensor 5 Sensor 6 Sensor 7 Sensor 8 Sensora_1,0 Sensora_1,1 Sensora_1,2 Sensora_1,3 Sensora_1,4 Sensora_1,5 Sensora_1,6 Sensora_1,7
Sensor 9 Sensor 10 Sensor 11 Sensor 12 X X X X Sensora_2,0 Sensora_2,1 Sensora_2,2 Sensora_2,3 X X X X
Una vez concluido el barrido del sensor A se dejará transcurrir un tiempo T para iniciar con el barrido del sensor B con el efecto de evitar traslape de información y fallos en la

68
secuencia de activación y así obtener la dirección correcta de la persona que ha activado los sensores, además, es necesario activar una variable extra “SEC” en el barrido del sensor B pues será el punto de referencia para poder saber cuál de los dos sensores se activó primero. El tiempo T será elegido dependiendo de la separación existente entre sensor A y sensor B, con el objeto de que el programa no realice un barrido en el sensor B hasta que se tenga una certeza de que el individuo lo activará.
El siguiente diagrama de tiempos explica todo lo anterior: Sensor A Sensor B Reproducción
Ilustración 5-6.- Reproducción tras detección
Cuando el sensor A se encuentre activado y SEC no se encuentre activado y se active
posteriormente el sensor B, indicará que la secuencia de activación es correcta y se podrá modificar la variable SENSORA_1, n y SENSORB_1, n que será utilizado en la rutina de reproducción de mensaje; cuando la variable SEC se encuentre activada y se active el sensor A, no se modificarán ninguno de las variables.
Se podría pensar que siguiendo la lógica mostrada en los diagramas de flujo para la
detección de secuencia es suficiente para poder saber la dirección que tomarán los individuos dentro del recinto, sin embargo, la velocidad a la cual opera el microcontrolador nos lleva a utilizar una variable en programación que inhiba la lectura del sensor A cuando se haya activado el sensor B antes que este. A pesar de la velocidad y todas las bondades de los microcontroladores, la activación de los sensores no puede estar ocurriendo al mismo tiempo, siempre existirá un retardo entre el barrido de un sensor y otro, por lo que es necesario a la hora de realizar el barrido del sensor A se pregunte antes el estado de SEC, pues si este se encuentra presente el programa no deberá hacer caso del estado del sensor A, pues la dirección es contraria y no deberá existir reproducción. Lo que sucedería si no se tuviese la variable SEC es que siempre que estuvieran activados los dos sensores, sin importar el orden de aparición, se activaría la reproducción del mensaje.
Cuando se hayan modificado pertinentemente las variables SENSORA_1, N y
SENSORB_1, N, el programa se dirige a una rutina de nombre SET_PLAY en donde se activará una variable de nombre PLAYBACK_1, N una vez que se haya detectado la secuencia correcta del recorrido de los visitantes.
Esta es una variable interna de programación y debe coincidir, con una diferencia de
tiempos a considerar, con la reproducción del canal, y decimos que habrá una diferencia de tiempos a considerar puesto que tenemos 12 canales compuestos por módulos de 2 sensores cada uno y los tiempos utilizados en realizar el barrido en todos los módulos y activar los bits correspondientes suman un tiempo que representará la diferencia entre lo que sucede en la programación y lo que sucede físicamente con el dispositivo.
69
Cuando los bits de PLAYBACK_1, N se encuentran presentes, se tienen todo listo para
enviar canal por canal información a los dispositivos LATCH y a los ISD a través del puerto C, B4 Y B3.
5.2.3 RETENEDOR LATCH PARA CONTROL DE EVENTOS. El dispositivo 74HC259 es un LATCH o retenedor de alta velocidad de 8 bits
direccionables, con la capacidad de retener una línea simple de 8 bits y ser un decodificador y demultiplexor de 3 a 8 bits. A lo largo del proceso, este dispositivo irá almacenando o reteniendo los estados de los canales que se han activados mediante programación, hasta que el valor poseído en la línea de 8 bits sea leída; mientras el estado no ha sido leído los datos serán almacenados por el retenedor sin perderse. Es de suma importancia el uso de este dispositivo dentro del proceso ya que debido a la velocidad de trabajo por parte del microcontrolador, en caso de que el retenedor no existiese, los datos serían enviados a tal velocidad que no habría tiempo de distinguir cuáles fueron activados y cuáles no fueron activados, una paradoja de la falta del uso del retenedor es en una banda de producción en donde se depositan botellas a una banda transportadora; si el robot no va almacenando el número de botellas puestas a la banda y no monitorea si están siendo retiradas de la banda transportadora por otro robot al final del proceso, el primer robot seguiría poniendo botellas y en el extremo de la banda transportadora habría una coalición de botellas puesto que no existe una “retención” de la información enviada para poder dar tiempo de que los robots realicen la lectura pertinente. Para evitar la coalición de información en el proceso y dada la velocidad empleada por el microcontrolador, requerimos de un dispositivo que retenga los valores hasta que estos puedan ser leídos y sin dejar de recibir los estados, es por eso que al 74HC259 también se emplea muy usualmente para controlar dispositivos como leds, lámparas, relays o dispositivos que necesiten un simple control de paro y arranque y que estos a su vez se encuentren controlados por una memoria EPROM o memoria flash.
Particularmente utilizaremos bits de control para los LATCH que con RB3 Y RB4
controlaran la activación del LATCH 1 Y LATCH 2 respectivamente. A través de RB0…RB2 se enviará el valor que será decodificado para controlar los 12 ISD, como es de suponerse el uso de 2 dispositivos 74HC259 es para poder tener 12 bits de control, 8 bits de uno de los LATCH y 4 bits de otro. RB3 Y RB4 controlarán cuál de los dos dispositivos se activará una vez que se les haya sido enviado un estado alto (1); hasta que RB3 o RB4 se encuentren en 1, la información podrá ser enviada por el LATCH y aunque RB3 o RB4 se encuentren en 0, el estado será retenido hasta que sea leído o modificado por la existencia de otro valor.
Por cuestiones de orden y entendimiento del proyecto, es conveniente que anexemos en este capítulo el esquemático de la tarjeta de control, que es donde se concentran los dos microcontroladores y definen la operación de los dispositivos en general, además permitirá conocer el por qué de la activación de determinadas terminales en puertos específicos, como es el caso de el puerto B que controla los retenedores.

70
MCL
R/VP
P1
RA0/
AN
02
RA1/
AN
13
RA2/
AN
2/VR
EF-
4
RA3/
AN
3/VR
EF+
5
RA4/
T0CK
I6
RA5/
AN
4/SS
7
RE0/
RD/A
N5
8
RE1/
WR/
AN
69
RE2/
CS/A
N7
10
VDD
11
VSS
12
OSC
1/CL
KIN
13
OSC
2/CL
KO
UT14
RC0/
T1O
SO/T
1CK
I15
RC1/
T1O
SI/C
CP2
16
RC2/
CCP
117
RC3/
SCK/
SCL
18
RD0/
PSP0
19
RD1/
PSP1
20
RD2/
PSP2
21
RD3/
PSP3
22
RC4/
SDI/S
DA
23
RC5/
SD0
24
RC6/
TX
/CK
25
RC7/
RX
/DT
26
RD4/
PSP4
27
RD5/
PSP5
28
RD6/
PSP6
29
RD7/
PSP7
30
VSS
31
VDD
32
RB0/
INT
33
RB1
34
RB2
35
RB3/
PGM
36
RB4
37
RB5
38
RB6/
PGC
39
RB7/
PGD
40
CI6
X2
C51
C52
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
J25
1 2 3 4 5
J26
PB1
PB2
PB3
PB4
PB1
PB2
PB3
PB4
VCC
VCC PO
T1
RS
RS
E
E
D0
D1
D2
D3
D4
D5
D6
D7
D0
D1
D2
D3
D4
D5
D6
D7
VCC
A10
B11
C14
D13
INH
15
IO C
OM
X1
IO 0
9
IO 1
8
IO 10
21
IO 11
20
IO 12
19
IO 13
18
IO 14
17
IO 15
16
IO 2
7
IO 3
6
IO 4
5
IO 5
4
IO 6
3
IO 7
2
IO 8
23
IO 9
22
VCC
24
GN
D12
CI7
VCC
A B C D IO_C
OM
IO_C
OM A B C D
R43
VCC
DA
TA
CLO
CK
DA
TACL
OCK
R49
R48
REL1
REL2
VCC
VCC Q
2
Q1
POW
ER 1
POW
ER 2
POW
ER 1
POW
ER 2
J27
J28
J29
C41
C42
C43
C44PB
1PB
2PB
3PB
4C40
C48
C46
C45
C39
C47
LED
1LE
D2
LED
3
LED
1LE
D2
LED
3
R50
R51
R52
LED
1
LED
2LE
D3
VCC
VCC
VCC
X1
1
X2
2
VBA
T3
SDA
5
SCL
6
SQW
/ OU
T7
VCC
8
GN
D4
CI8
X3
VCC
SDA
SCL
SQW
/ OU
T
SDA
SCL
SQW
/ OU
T
D1
D2
VCCR3
0
C53
C54
VCC
17/0
5/20
04
DIS
PLA
Y, P
OW
ER S
UPP
LY
MÓ
DU
LO D
E LO
S SE
NTI
DO
SB
IOPA
RQU
E, P
UEB
LA
AN
D V
OLU
ME
CO
NTR
OL
LOA
D[1
..12]
R26
R27
R28
R29
VCC
C50
C49
VCC
DZ1
R44
VCC
R31
R32
R33
R34
R35
R36
R37
R38
R39
R40
R41
R42
VCC
Cann
ot o
pen
file
C:\I
NG
TEG
RA\
Doc
umen
tos\I
mag
enes
\LOG
O E
VERT
.jpg
Títu
lo
Proj
ecto
REV
ISIO
NES
REV
.FE
CH
A
Calle
Fra
ncisc
o D
íaz C
ovar
rubi
asN
o. 1
4 Co
l. Sa
n Ra
fael
C. P
. 064
70D
. F.,
Méx
ico
Tel.:
01
(55)
555
7-39
31
Apro
bó:
GI/
Gua
lber
to G
arcía
Gal
lego
s
MO
DIF
ICA
CIÓ
NA
DIA
GRA
MA
NU
EVO
R45
R46
R47
VCC
NL
L12
L1 L2 L3 L4 L5 L6 L7 L8 L9 L10
L11
L[1.
.12]
DA
TA
CLO
CK
L1 L2 L3 L4 L5 L6 L7 L8 L9 L10
L11
L12
Ilustración 5-7.- Esquemáticos Tarjeta de Control.

71
CH_12 BTFSS PLAYBACK_2, 3 GOTO EXIT_CH12 BTFSC ISD_B, 3 RETURN BSF PORTB, 0 BSF PORTB, 1 BCF PORTB, 2 BCF CH_CTRLB, 3 BSF ISD_B, 3 CALL ON_CHB ON_CHB CLRF DT_VOICE CALL TXB MOVLW 0X04 MOVWF DT_VOICE CALL TXB CALL T_25MS BSF PORTB, 4 CLRF DT_VOICE CALL TXB MOVLW 0X07 MOVWF DT_VOICE CALL TXB BSF PORTB, 4 RETURN En el Puerto B se toma control de los dos retenedores implementados en el módulo de
los sentidos, a través de los primeros tres bits, se elegirá el canal que será reproducido. Este valor es leído por ambos retenedores, y el valor se encuentra “retenido” en los dos hasta que se determine el bit de activación, en este caso coordinado con la terminal RB4 que será modificado hasta que se realice la transmisión de información al ISD, tal cual se observa en la subrutina ON_CHB.

72
5.2.4 ENVÍO DE EVENTOS MEDIANTE EL MÓDULO SSP. A través del puerto C, se enviarán señales de control mediante comunicación serial SSP
para activar todos los ISD y posteriormente, tras el mandato del LATCH, reproducir uno o varios específicamente. Los ISD se encuentran listos a todo momento y solo en espera de recibir el último bit que activará la reproducción del mensaje; cuando ya se ha detectado la secuencia adecuada para la reproducción y se han activado todas las variables correspondientes dentro del programa y enviado los bits de control para los LATCH, a través del puerto C, mediante una comunicación serial síncrona SSP, se envían las señales de activación de los ISD con un orden de valores y tiempos necesarios para su activación como lo describe el siguiente fragmento del programa:
ON_CHB CLRF DT_VOICE CALL TXB MOVLW 0X04 MOVWF DT_VOICE CALL TXB CALL T_25MS BSF PORTB, 4 CLRF DT_VOICE CALL TXB BSF PORTB, 4 RETURN TXB CLRF STATUS BCF PORTB, 4 BCF PIR1, SSPIF MOVFW DT_VOICE, W MOVWF SSPBUF BSF STATUS, RP0 Como puede observarse la variable DT_VOICE toma diferentes valores que son usados
en la subrutina de TXB. La rutina ON_CHB tiene la misión de preparar los ISD y esperar al final de la secuencia de bits de control el bit que decidirá cuál o cuáles deberán reproducir el mensaje, tarea que ya ha sido designada en a RB3 y RB4 junto con el valor que ha sido enviado mediante el puerto B al LATCH.
Recordando algunos puntos citados en el capítulo dedicado al ISD y reafirmando en el
capítulo de Reproducción y Grabación de mensajes, los valores enviados por la subrutina TXB en la variable DT_VOICE, son los comandos de activación para el ISD.

73
5.3 LCD Una de las aplicaciones más requeridas, no tan solo en este proyecto, sino en general
por cuestiones de interacción entre usuario y módulo de control es un LCD, que es propiamente una interfase de comunicación o un dispositivo periférico, pues a través de él y con la ayuda de un pad o teclado, se podrá tener acceso a diferentes aplicaciones que se han venido nombrando a lo largo de este escrito, como lo son el control de volumen y los datos generales de la empresa y del museo.
A continuación detallaremos líneas de comando necesarias para poder manejar un LCD de 4X24, es conveniente aclarar que muchas líneas de programación se darán por entendidas si es que se ha comprendido el contenido de nuestro marco teórico.
Para mayor facilidad, únicamente analizaremos fragmentos del programa con las subrutinas necesarias para el despliegue de información en el LCD.
LIST P=16f877A ERRORLEVEL -302 LIST INCLUDE <P16F877A.INC> LIST PB1 EQU 4 PB2 EQU 5 PB3 EQU 6 PB4 EQU 2 RS EQU 0 E EQU 1 LCD_DATA EQU PORTB LCD_CNTL EQU PORTE MUX EQU PORTA LM1971 EQU PORTD LCD_INITIALIZE BSF PCLATH,3 CALL INIT_LM1971 BSF PCLATH,3 CALL INIT_LM1971 MOVLW 0X38 CALL INIT_1M MOVLW 0X01 CALL INIT_1M MOVLW 0X02 CALL INIT_1M MOVLW 0X0C CALL INIT_1M CALL MSG_01 BSF PORTC,5 BSF PORTC,6 BSF PORTC,7 MOVLW 0X4F MOVWF T4 DELAY_1 CALL T_50MS MSG_01 MOVLW 0X01 CALL SEND_CMD CALL T_1MS MOVLW 0X86 CALL SEND_CMD MOVLW 'I' CALL SEND_CHAR MOVLW 'N' CALL SEND_CHAR MOVLW 'R' CALL SEND_CHAR MOVLW 'A' CALL SEND_CHAR
MOVLW 0XC0 CALL SEND_CMD RETURN SEND_CMD2 MOVWF CHAR CALL T_1MS MOVF CHAR,W BCF LCD_CNTL,RS MOVWF LCD_DATA BSF LCD_CNTL,E BCF LCD_CNTL,E RETURN SEND_CHAR3 MOVWF CHAR CALL T_1MS MOVF CHAR,W BSF LCD_CNTL,RS MOVWF LCD_DATA BSF LCD_CNTL,E BCF LCD_CNTL,E RETURN T_1MS MOVLW 0X4 MOVWF T1 T_X8 MOVLW 0XF9 MOVWF T2 T_125MS DECFSZ T2 GOTO T_125MS DECFSZ T1 GOTO T_X8 RETURN INIT_1M1 MOVWF LCD_DATA CALL T_1MS BSF LCD_CNTL,E BCF LCD_CNTL,E RETURN
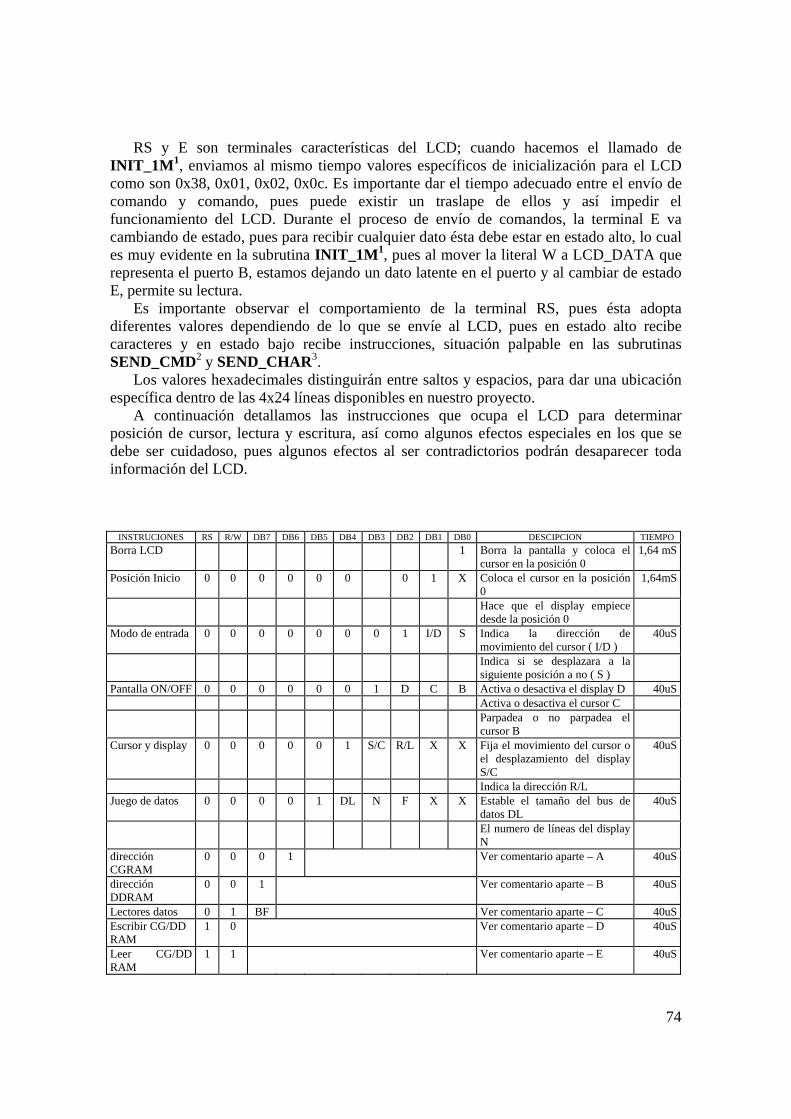
74
RS y E son terminales características del LCD; cuando hacemos el llamado de INIT_1M1, enviamos al mismo tiempo valores específicos de inicialización para el LCD como son 0x38, 0x01, 0x02, 0x0c. Es importante dar el tiempo adecuado entre el envío de comando y comando, pues puede existir un traslape de ellos y así impedir el funcionamiento del LCD. Durante el proceso de envío de comandos, la terminal E va cambiando de estado, pues para recibir cualquier dato ésta debe estar en estado alto, lo cual es muy evidente en la subrutina INIT_1M1, pues al mover la literal W a LCD_DATA que representa el puerto B, estamos dejando un dato latente en el puerto y al cambiar de estado E, permite su lectura.
Es importante observar el comportamiento de la terminal RS, pues ésta adopta diferentes valores dependiendo de lo que se envíe al LCD, pues en estado alto recibe caracteres y en estado bajo recibe instrucciones, situación palpable en las subrutinas SEND_CMD2 y SEND_CHAR3.
Los valores hexadecimales distinguirán entre saltos y espacios, para dar una ubicación específica dentro de las 4x24 líneas disponibles en nuestro proyecto.
A continuación detallamos las instrucciones que ocupa el LCD para determinar posición de cursor, lectura y escritura, así como algunos efectos especiales en los que se debe ser cuidadoso, pues algunos efectos al ser contradictorios podrán desaparecer toda información del LCD.
INSTRUCIONES RS R/W DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 DESCIPCION TIEMPO Borra LCD 1 Borra la pantalla y coloca el
cursor en la posición 0 1,64 mS
Posición Inicio 0 0 0 0 0 0 0 1 X Coloca el cursor en la posición 0
1,64mS
Hace que el display empiece desde la posición 0
Modo de entrada 0 0 0 0 0 0 0 1 I/D S Indica la dirección de movimiento del cursor ( I/D )
40uS
Indica si se desplazara a la siguiente posición a no ( S )
Pantalla ON/OFF 0 0 0 0 0 0 1 D C B Activa o desactiva el display D 40uS Activa o desactiva el cursor C Parpadea o no parpadea el
cursor B Cursor y display 0 0 0 0 0 1 S/C R/L X X Fija el movimiento del cursor o
el desplazamiento del display S/C
40uS
Indica la dirección R/L Juego de datos 0 0 0 0 1 DL N F X X Estable el tamaño del bus de
datos DL 40uS
El numero de líneas del display N
dirección CGRAM
0 0 0 1 Ver comentario aparte – A 40uS
dirección DDRAM
0 0 1 Ver comentario aparte – B 40uS
Lectores datos 0 1 BF Ver comentario aparte – C 40uSEscribir CG/DD RAM
1 0 Ver comentario aparte – D 40uS
Leer CG/DD RAM
1 1 Ver comentario aparte – E 40uS

75
CODIGO 0 I I/D Decrementa la posición del
cursor Incrementa la posición del cursor
S Display no avanza Display avanza D Display no se ve Display se ve C Cursor no se ve Cursor se ve B No hay parpadeo del cursor Hay parpadeo del cursor
S/C Mueve el cursor Desplaza el display R/L Desplazamiento a la izquierda Desplazamiento a la derecha DL Bus de datos de 4 bits Bus de datos de 8 bits N LCD de una línea LCD de dos líneas F Caracteres de 5x7 puntos Caracteres de 5x10 puntos
BF Puede admitir instrucciones No admite instrucciones Tabla 5-3.- Código LCD

76
5.4 TARJETA DE REPRODUCCIÓN DE CUÑAS.
5.4.1 ISD Una parte de suma importancia en el recorrido de todo el proyecto, es la opción de
grabar y reproducir un mensaje a través de un dispositivo electrónico. Como ya lo hemos descrito y explicado con anterioridad, el ISD posee características muy importantes en este tipo de soluciones y nos permite sustituir sistemas de reproducción como de disco compacto o MP3 y aunque con limitantes en cuanto a la capacidad de almacenamiento y quizás también en nitidez de señal, brinda una solución económica y funcional a nuestro proyecto.
De igual forma, en éste capítulo se dará una explicación práctica de la aplicación del SPI y la interacción existentes entre dos dispositivos para el envió de información y control de determinados procesos.
En el programa que nos basaremos para el análisis de la configuración de SPI y de la operación de ISD pertenece a la tarjeta de grabación y reproducción; obviamente todas las instrucciones y configuraciones son estrictamente similares en el programa perteneciente al módulo de control, sin embargo a través del programa existirán variables con nombres diferentes y con direcciones similares a otros programas, lo cual no debe desviar la atención de lo que estrictamente se pretende explicar en este apartado.
Por primer punto el registro ADCON1 configurará RE2.RE0, RA5.RA0 como entradas
o salidas digitales, las cuales serán definidas con los valores puestos en TRISA Y TRISE, para éste caso el puerto E será destinado para salidas digitales y el puerto A como entradas digitales. Se activarán las interrupciones del SSP, así como las interrupciones globales. Los datos serán transmitidos en el filo de bajada, también se determina que SCK, SDO, SDI Y SS son configurados como la fuente en el puerto serial que también ha sido activado.
Tal como lo relata el programa, una vez que se adentra a la rutina RECORD, el puerto B será limpiado, al igual que la variable DT_VOICE y se hará el primer llamado a la rutina TX, en ella, el primer valor que será enviado es el de 00, cumpliendo el respectivo proceso de verificación de bits una vez que el dato puesto en el SSPBUF haya sido enviado por completo. Al enviarlo, tendremos que esperar un tiempo determinado pactado por las especificaciones del ISD, en este caso será de 6s, posteriormente el dato 04 se enviará y la espera necesaria será de 25 milisegundos, el dato 04 activara C2, que tal como se mencionó en el marco teórico, se activará dos ocasiones y una vez que hayan pasado 50 milisegundos se enviará el comando 00101 con el dato 05 y con la activación de la terminal 2 del puerto C, podremos comenzar con la adquisición de voz que será retenida por el ISD en la localidad 0000. Posteriormente, mediante el comando 01100 representado por el dato 0C, daremos la señal de STOP y así el proceso de grabado concluirá.
El proceso para la reproducción cumple con los mismos lineamientos relatados y ahora
comprados en programa que se mencionaron en el marco teórico, en lo que cabe mencionar que el éxito del funcionamiento del ISD recae en la adecuada programación de los tiempos de ejecución entre instrucción e instrucción.

77
LIST P=16f877A ERRORLEVEL -302 LIST INCLUDE <P16F877A.INC> LIST DT_VOICE EQU 26 ORG 0X06 CLRF STATUS BSF STATUS,RP0 MOVLW 0X06 MOVWF ADCON1 MOVLW 0X3F MOVWF TRISA MOVLW 0X03 MOVWF TRISB MOVLW 0X10 MOVWF TRISC CLRF TRISD CLRF TRISE BSF PIE1, SSPIE CLRF INTCON BSF INTCON, GIE CLRF SSPSTAT BSF SSPSTAT, CKE CLRF STATUS CLRF SSPCON BSF SSPCON,SSPEN BSF SSPCON,SSPM0 RECORD CLRF PORTB CLRF DT_VOICE CALL TX MOVLW 0X04 MOVWF DT_VOICE CALL TX CALL T_25MS BSF PORTC,2 CLRF DT_VOICE CALL TX MOVLW 0X04 MOVWF DT_VOICE CALL TX CALL T_50MS BSF PORTC,2 CLRF DT_VOICE CALL TX MOVLW 0X05 MOVWF DT_VOICE CALL TX CALL LED1 BSF PORTC,2 CALL T_6S CALL T_6S CLRF DT_VOICE CALL TX MOVLW 0X0C MOVWF DT_VOICE CALL TX BSF PORTC,2 CALL T_50MS BCF PORTB,GREEN1
BSF PORTB,RED1 CALL T_50MS CALL T_50MS CALL T_50MS BCF PORTB,RED1 RETURN PLAYBACK CLRF PORTB CLRF DT_VOICE CALL TX MOVLW 0X04 MOVWF DT_VOICE CALL TX CALL T_25MS BSF PORTC,2 CLRF DT_VOICE CALL TX MOVLW 0X07 MOVWF DT_VOICE CALL TX CALL LED2 BSF PORTC,2 CALL T_6S CALL T_6S CLRF DT_VOICE CALL TX MOVLW 0X0C MOVWF DT_VOICE CALL TX BSF PORTC,2 CALL T_50MS BCF PORTB,GREEN2 BSF PORTB,RED2 CALL T_50MS CALL T_50MS CALL T_50MS BCF PORTB,RED2 RETURN TX CLRF STATUS BCF PORTC,2 BCF PIR1,SSPIF MOVF DT_VOICE,W MOVWF SSPBUF BSF STATUS,RP0 LOOP_VOICE1 BTFSS SSPSTAT,BF GOTO LOOP_VOICE1 CLRF STATUS LOOP_VOICE2 BTFSS PIR1,SSPIF GOTO LOOP_VOICE2 RETURN T_6S MOVLW 0xff; 0X14 MOVWF T4 TIMER CALL T_50MS CALL T_50MS DECFSZ T4 GOTO TIMER RETURN

78
5.5 ATENUADOR LM 1971 Una de las propuestas más atractivas ofrecidas al Consejo Cívico Cultural Cinco de
Mayo, es el poder elegir el volumen o silencio de cada uno de los canales. Resulta muy importante comentar aspectos de arquitectura, puesto que todas las terminales que salen del multiplexor y que son destinadas a distinguir cuál de los atenuadores son los elegidos para operar, han sido invertidas, siguiendo lo estipulado en la operación del LM1971.
El funcionamiento del LM1971 es un tanto enredado y aprovecharé para hablar de las
complicaciones que representó el habilitar opciones de control de volumen en el módulo de los sentidos. El atenuador se ofrece con un dispositivo que se puede controlar a través de un microcontrolador y que posee 3 terminales que representan una interfase digital serial, y que toda la información debe tener un protocolo al ser enviada a través de la terminal DATA. En un principio se creyó que debería de existir una comunicación serial a través de esa terminal mediante el SSPI, pero debido a las características de éste dispositivo resultaba ser una alternativa hasta cierto punto ilógica. El punto crucial de programación para el dispositivo es que los datos deben ser enviados de forma serial a través de una sola terminal, en este caso, a través de la terminal DATA, simulando, a mi muy particular punto de vista, un mensaje en clave Morse, puesto que los datos se van enviando uno a uno por dicha terminal y el protocolo al cual se hace mención en las hojas de datos también es elegido y propuesto por el programador.
En el siguiente fragmento de programa se visualiza perfectamente como a través de un corrimiento lógico mediante el comando RLF, tiempos de reloj específicos y programando adecuadamente los filos de subida en la terminal CLOCK y la activación a los tiempos específicos de la terminal LOAD, se materializa la configuración y operación del atenuador en el proyecto, siguiendo ésta metodología.
En primer término, se debe activar el retenedor, el cuál fue conectado a la terminal 5 para su activación y en las terminales 0, 1, 2, 3, 4, del puerto A del microcontrolador, se toma control del Multiplexor que será el encargado de elegir el atenuador al cual se le envíe datos en el momento que exista una modificación en el panel de control de volumen. Una vez que haya sido elegido el canal o el atenuador a modificar, se procede a realizar mediante programación el protocolo de comunicación.
Como bien sabemos la comunicación se iniciará únicamente cuando la terminal LOAD este en estado bajo “0”, lo cual también debe ocurrir 150 ns después de que haya sido iniciado el primer filo de subida de CLOCK. Una vez cumplido con éste proceso, podemos enviar la información en la terminal DATA, enviando primero la elección del canal como 0000, como se muestra en el LOOP_1V. La variable T3 es modificada con el valor 0x08, con el objetivo de enviar 1 byte, que en esta ocasión será el BYTE 0 y al comenzar la subrutina de LOOP_2V, se enviará el BYTE 1, por lo consiguiente T3 vuelve a ser modificado con el mismo valor; dentro de la rutina se ejecutará un corrimiento lógico hacia la izquierda, a sabiendas que la variable VOLUME_VAR ha sido modifica en otra subrutina con los valores elegidos por el usuario. Con éste corrimiento se leerá la variable como tal de forma serial y se escribirá en la terminal DATA de la misma forma.
Como es de observarse, el estado de la terminal CLOCK, una vez que ya se tiene el dato en la terminal DATA, será modificado a un estado alto y así cumplir con la especificación de envío de datos en el atenuador.

79
Cuando enviamos los datos, si no existiese un retenedor anterior al atenuador, podríamos perder la información, pues como sabemos, estamos trabajando en tiempo real y los estados enviados a las terminales pueden durar mili segundos o nano segundos, según sea el caso; mediante el retenedor, leeremos el estado y lo retenemos hasta que sea leído por el atenuador en los tiempos de reloj específicos.
CHANNEL_VOL MOVWF VOLUME_VAR BSF PORTA, 3 BSF PORTA, 5 CALL ADD_LATCH MOVLW 0X08 MOVWF T3 BSF LM1971, LMDT BSF LM1971, LMCLK NOP NOP BCF LM1971, LMCLK CALL CTRL_ADD BCF LM1971, LMDT LOOP_1V BCF LM1971, LMCLK NOP BSF LM1971, LMCLK DECFSZ T3 GOTO LOOP_1V MOVLW 0X08 MOVWF T3 LOOP_2V BCF LM1971, LMCLK BTFSS VOLUME_VAR, 7 GOTO CLR_LMDT BSF LM1971, LMDT GOTO DUTY_CLK CLR_LMDT BCF LM1971, LMDT DUTY_CLK RLF VOLUME_VAR BSF LM1971, LMCLK NOP DECFSZ T3 GOTO LOOP_2V BCF PCLATH, 3 RETURN

80
6. IMPLEMENTACIÓN DEL PROYECTO
No indagaremos mucho a cerca de los métodos utilizados para la elaboración de las tarjetas y de los circuitos impresos, puesto que no es la intención de éste documento plasmar información referente a circuitos impresos. Daremos una breve explicación de las tarjetas, el por qué de la ubicación de los dispositivos, el programa utilizado y las dificultades enfrentadas en la arquitectura del módulo de los sentidos.
6.1 PROTEL DXP El programa PROTEL DXP representa una de las herramientas más actuales y
eficientes en cuanto al diseño de circuitos impresos y elaboración de esquemáticos. A continuación relataremos someramente algunas de las cuestiones a tomar en cuenta en la arquitectura de una tarjeta profesional.
1. Las medidas del gabinete se adaptan a las necesidades planteadas por el
CCCCM y como es de suponerse, las tarjetas han sido diseñadas con respecto al gabinete, lo cual resulta muy lógico, pero a la vez limita mucho el ensamblado puesto que las medidas de estas se deben de ajustar no solamente al gabinete que las contenga sino al número de dispositivos y de terminales que se requieran.
2. Es sumamente importante en el momento de tomar decisiones en cuanto a la ruta que tomará las pistas, conocer la arquitectura exacta del dispositivo, conector o terminal que se empleará, pues en muchos de los casos, el acceso para poder soldar adecuadamente se ve perjudicado por el espacio existente entre cada una de las pistas y de los dispositivos.
3. El programa, predefinidamente, posee librerías de diversos dispositivos, ya sea compuertas, resistencias, diodos, transistores, microcontroladores, etc., sin embargo, muchos de los dispositivos deben ser medidos a exactitud mediante un calibrador o vernier, puesto que los PCB, poseen diferentes capas de grabado como son las pistas, la imagen de los dispositivos y logotipos, por lo consiguiente al no existir una correspondencia entre las dimensiones reales del dispositivo y las que se establecen en el programa, en el momento de adquirir los negativos para elaborar toda la serigrafía de la tarjeta, todo el circuito podría pertenecer a una medida totalmente diferente a la que se pretende.
4. Es recomendable que se utilicen bases maquinadas para dispositivos que son muy sensibles y así facilitar la sustitución o permita elaborar pruebas de funcionamiento más fácilmente.
5. Una vez que se haya realizado la unión de todos los puntos dentro del PCB, es recomendable imprimirlo y seguir conexión por conexión y cerciorarse de que todos los puntos hayan sido unidos correctamente, puesto que no hay que olvidar que los programas pueden tener errores o variaciones y no podemos confiar de ellos al 100%. Aquí mismo deberemos revisar que las perforaciones planeadas para sujetar las tarjetas al gabinete coincidan perfectamente con la ubicación de estos físicamente, puesto que al momento de ensamble podrán no

81
coincidir y presentar problemas de juego entre tarjetas, a tal grado de poder ocasionar un corto circuito.
6. Las pistas deben ser siempre un poco anchas, arriba de 10 milésimas, con el objetivo de que la superficie de conducción sea amplia y no ocasione rupturas por calentamiento, sin embargo, cuando una tarjeta presenta mucho cobre puede también funcionar como una especie de antena y poder causar “ruido” que altere algún tipo de proceso. En nuestro caso, fue más conveniente tener una superficie de cobre amplia para la tierra interna, evitando así el ruido en la reproducción de los mensajes.
7. Cuando se está eligiendo la ubicación de los dispositivos y comenzar a estructurar las rutas, se debe tener cuidado especial en la ubicación de los dispositivos que son propensos a calentamientos, con el objetivo de poder contemplar un disipador de calor a un tamaño conveniente que nos evite calentamientos extremos y dañe nuestro dispositivo.
8. En caso de que se maneje potencia, siempre será recomendable anexar un par de ventiladores pequeños, al igual que en las fuentes de voltaje y mantener una temperatura idónea para el funcionamiento del dispositivo.
9. Se debe tener la debida precaución al momento de requerir los negativos, puesto que se deberá especificar claramente cuál es el lado correcto, y así evitar que las perforaciones se realicen en espejo. Debido a esto, es muy conveniente anexar las siglas de la empresa, logotipo o quizás un número de control que se pueda leer y así determinar la cara correcta a ser perforada.
10. Cuándo se eligen pistas muy pequeñas y muy juntas, es muy probable que en el momento de hacer la serigrafía se junten, propiciando así que existan cortos circuitos en la tarjeta, lo más indicado es que antes de poner cualquier dispositivo, se verifique la continuidad de las pistas, y que no existan puntos unidos entre el positivo y negativo de la fuente.
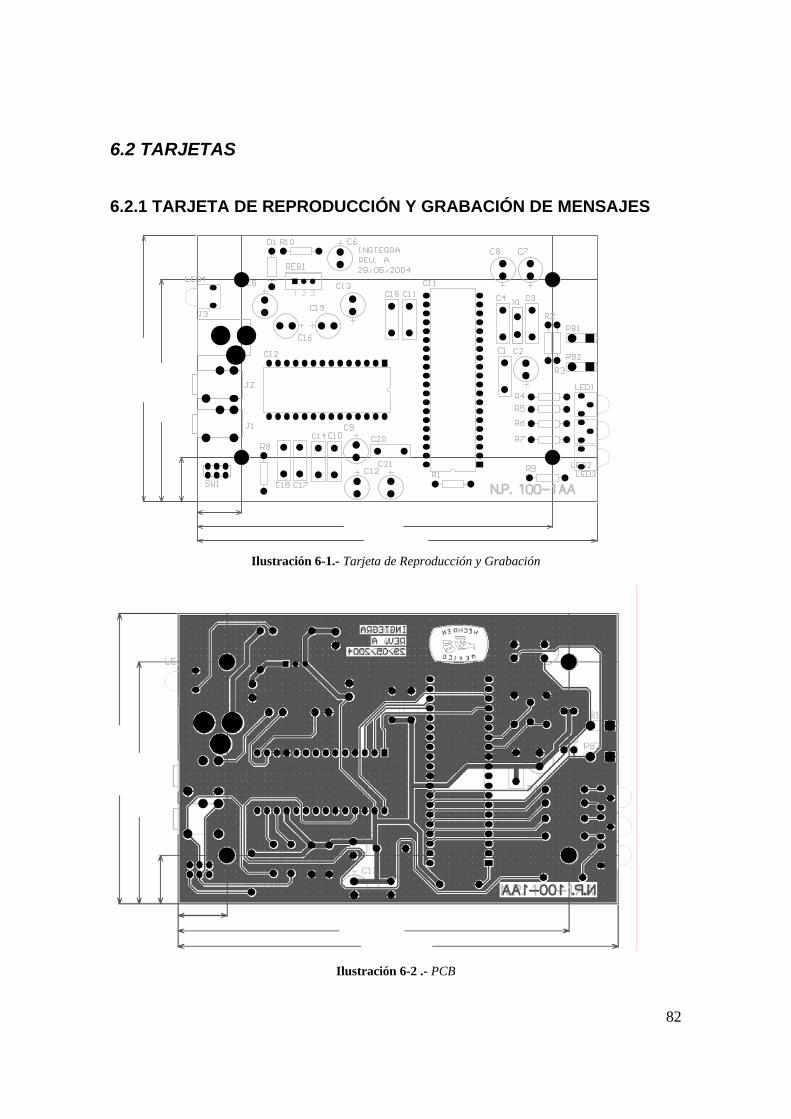
82
6.2 TARJETAS
6.2.1 TARJETA DE REPRODUCCIÓN Y GRABACIÓN DE MENSAJES
Ilustración 6-1.- Tarjeta de Reproducción y Grabación
Ilustración 6-2 .- PCB

83
6.2.2 TARJETA DE CONTROL
Ilustración 6-3.- Tarjeta de Control

84
Ilustración 6-4 .- Tarjeta de Control PCB

85
6.2.3 TARJETA DE REPRODUCCIÓN DE MENSAJES
Ilustración 6-5 .- Tarjeta de Reproducción

86
Ilustración 6-6.- Tarjeta de Reproducción PCB

87
6.3 GABINETE
El gabinete ha sido manufacturado en acero inoxidable con la finalidad de brindar durabilidad y acabado sin necesidad de agregar algún tipo de pintura o acabado adicional, reduciendo costos y tiempos de producción. El acero inoxidable también brinda una opción interesante en cuanto a la disipación de calor, sin embargo el tratado de éste resulta caro y complicado por lo que no se utilizaron figuras complicadas y de echo en los canales de ventilación se eligió un estilo de maya perforada con el objeto de simplemente perforar y no recurrir a una fresadora o cortadora industrial para elaborar ranuras de acabados similares a los gabinetes de las computadoras personales.
La ranura que contendrá el LCD debe tener características especiales, debido a que el borde del LCD no puede tocar una superficie metálica y mucho menos si esta se conecta directamente a la tierra física del dispositivo. Debido a esto la ranura es 4 milímetros mayor al borde del LCD y para que de esta forma el espacio existente entre ambos marcos sea cubierto con un material dialéctico conocido como mata filo.
Toda la tortillería ha sido seleccionada con características inoxidables y personalizada, ya que se eligió una medida tipo “l”milimétrica y así evitar que cualquier persona pueda tener acceso al interior del dispositivo y de cierta forma asegurarnos que únicamente nosotros podremos brindar el servicio de mantenimiento.
Un adecuado aislamiento de los tornillos que sujeten la tarjeta puede evitar situaciones complicadas de cortos circuitos, debido a esto, en la actualidad se ha optado por el uso de tornillos plásticos o fijadores plásticos.
6.3.1 ESQUEMÁTICOS
A continuación se ilustran los planos del gabinete que contendrá los dispositivos, de igual forma se anexa información trascendental como lo es las medidas de las perforaciones y planos en general para poder elaborar la manufactura.
Ilustración 6-7.- Gabinete

88
Ilustración 6-8 .- Medidas 1

89
Ilustración 6-9.- Medidas 2

90
Ilustración 6-10.- Medidas 3

91
Tabla 6-1.- Perforaciones

92
6.4 BITÁCORA DE INSTALACIÓN Una vez que el diseño había sido terminado en el laboratorio, se procedió a la
instalación de éste en el Museo de la Biodiversidad. A pesar de que con antelación se realizaron recorridos y se tenía una idea generada a través de los planos, al ver la obra arquitectónica terminada, la apreciación fue muy diferente y surgieron nuevas incógnitas, debido a que muchas cosas que se habían planificado, debido a las modificaciones que surgieron durante el proceso de ejecución de la obra civil. Entre muchos detalles, los más trascendentales fueron los cambios en la ubicación de algunos de los módulos de sensor-altavoz que si bien no alteran en nada el funcionamiento del módulo de los sentidos, si alterarían el cableado y de cierta forma la detección de los visitantes.
6.4.1 VERIFICACIÓN DE INSTALACIÓN DE DUCTOS
El primer problema con el que nos encontramos fue la mezcla existente entre las líneas de transmisión de señales y las de voltaje, especificación que se había sugerido muy insistentemente a la compañía encargada de la obra civil, de lo cual hizo caso omiso. Como bien sabemos, las líneas de voltaje siempre causarán un tipo de ruido en las líneas de transmisión, a menos de que éstas hayan sido adecuadamente aisladas, que no fue el caso.
La intención que se tenía era de transmitir audio por una línea y transmitir datos por otra, sin embargo no pudo concretarse por las decisiones tomadas por la constructora. Afortunadamente se eligió cable Categoría 6 para la transmisión de datos y cable libre de oxígeno para la transmisión de audio, con el objetivo de tener líneas de transmisión eficientes y el resultado fue muy óptimo puesto que la cercanía con las líneas de tensión no repercutió en señales no deseadas en la reproducción de mensajes y no alteró el funcionamiento de nuestros sensores al momento de ser activados y desactivados.
6.4.2 VERIFICACIÓN DE INSTALACIÓN DE CASETAS
Algunas de las casetas que contendrán el módulo sensor altavoz, estaban instaladas en una posición que no les permitía detectar el paso de los individuos, en este caso, la solución fue modificar en su totalidad la orientación, puesto que de la correcta detección del paso de los individuos depende la eficiencia del funcionamiento del módulo de los sentidos.
En total se instalaron 12 casetas, se tuvieron que realizar ciertas modificaciones en los puntos de conexión para evitar la infiltración de líquidos que pudieran ocasionar el pronto deterioro de nuestros sensores y actuadores.
La idea principal era la de contener el cableado, una vez saliendo del registro, dentro de las casetas, pero la obra civil nos llevó, en unos casos, a la implementación de tubería externa para el tendido de la línea de transmisión, lo cual altera solamente el concepto arquitectónico, más no así, el funcionamiento del sistema.

93
6.4.3 CABLEADO
La experiencia que nos deja el poder haber estructurado el tendido del cable en el Museo de la Biodiversidad, es el poder saber que al momento de hacer el cálculo total de metros a utilizar, siempre es importante tener en consideración que los tramos de cable que se vayan dejando para ajustar distancias en específico, no podrán ser utilizados para complementar alguna ruta, debido a que esto implicaría una unión que va en contra de nuestros estándares de cableado estructurado, ocasionando que el desperdicio del cable es muy amplio y por lo consiguiente se eleva de cierta forma el precio unitario puesto que el porcentaje destinado en el arrojo de materiales al desperdicio de material es elevado y puede llegar a representar una pérdida sustancial al ingreso estimado.
De igual forma, al momento de elaborar el cálculo en el tendido de la línea siempre se consideró la longitud en términos de lamda, tal cual se estipula, la medida de todos los cables fueron en múltiplos de 90cm.
Al elaborar el reconocimiento de la línea, nos dimos cuenta de que la cuadrilla encargada de cablear, había etiquetado mal un par de líneas, por lo que desde el módulo se tuvo que hacer un cambio entre el canal 6 y el canal 7, teniendo el orden de reproducción de la siguiente forma:
1. Inicia recorrido, Zona del Olfato. 2. Zona del gusto lado derecho, Zona del Oído lado izquierdo. 3. Zona de la Vista. 4. Zona del Tacto. 5. Plantas exóticas lado derecho, Plaza del Arroyo lado izquierdo. 6. Areneros. 7. Plaza del Arroyo. 8. Sólo acceso a Puente Colgante. 9. Planta del Mes 10. Sólo salida del Puente. 11. Término de Recorrido. 12. Gracias por su Visita.
En la cuestión de la transmisión de audio, existió un factor que alteró de cierta forma el
poder haber dado el mejor funcionamiento al momento de reproducir los mensajes y este fue el presupuesto, ya que como se muestra en la tabla 5 como el tendido alcanzó casi los 100 metros en el mayor de los casos, el cable ideal para esta distancia, que brindaría la menor perdida de señal era del calibre 6, que fue presupuestado y rechazado por el CCCCM, así que el calibre aceptado y utilizado fue el 14.
Afortunadamente debido al tipo de señal que se está enviando, y básica para lo que será destinada, el parámetro de eficiencia en la línea de transmisión de audio es un tanto accesible y nos permitió el poder modificar el parámetro del calibre sin alterar el funcionamiento del sistema y fue realmente satisfactorio el poder darse cuenta de que a pesar de la pérdida en la señal, los niveles audibles de reproducción son bastante buenos. Los mensajes se reproducen con una gran nitidez, a muy buena potencia y ausente de señales no deseadas ni interferencias con algún tipo de radiofrecuencias.

94
6.4.3.1 CONFIGURACIÓN DE CABLE
A continuación se detalla la configuración implementada en el cable UTP categoría 5, para la transmisión de datos y alimentación de sensores, lo cual representa simplemente una manera ordenada y homogénea de transmitir y recibir datos en el módulo de los sentidos.
Hay que recordar que se tienen dos tendidos de cable UTP, uno para cada sensor, de los dos implementados para la detección de secuencia, denominados Sensor n, 1 y Sensor n, 2, donde n, podrá tomar valores de 1 a 12.
A través del alambre BC (blanco café) y AB (azul blanco), se energizará el sensor, el cual a través del alambre C (café) enviará la señal del relevador toda vez que haya sido activado, tal cual se describe a continuación:
Sensor 1, 1
BC C A AB VDD S (-) (-)
Sensor 1, 2
BV V N NB VDD S (-) (-)
Esta configuración debe ser respetada al momento de realizar el ponchado del cable.
6.4.4 PANEL DE PATCHEO
El CCCCM, por cuestiones de seguridad, requirió que el módulo de los sentidos no permanecería siempre en la caseta de operación, que éste fuera removible, de sencilla conexión, rápida y práctica. Por este motivo se requirió de un panel de patcheo, con el objetivo de ordenar las líneas de transmisión, etiquetar cada uno de los módulos y lograr, así, que cualquier persona fuera capaz de conectarlo y desconectarlo cuantas veces fuese necesario.
Como es de comprenderse, todo esto derivó en configuraciones internas puesto que la arquitectura de los paneles así lo requirió. Aunado a esto, reconociendo que no fue la mejor decisión el orden de las conexiones en el módulo de los sentidos pues no posee un orden estandarizado, ya que por cuestiones de arquitectura interna, se pensó que sería muy sencillo elaborar conexiones con base a la cercanía de los amplificadores dentro de la tarjeta, arrojando el siguiente orden de conexiones: Canal 1 Canal 2 Canal 3 Canal 4 Canal 5 Canal 6 Módulo 7 Módulo 9 Módulo 11 Módulo 1 Módulo 3 Módulo 5

95
Canal 7 Canal 8 Canal 9 Canal 10 Canal 11 Canal 12 Módulo 2 Módulo 4 Módulo 6 Módulo 8 Módulo 10 Módulo 12
De igual forma, en la transmisión de datos se obtuvieron 2 zonas, una para cada uno de los sensores de los módulos, teniendo lo siguiente: Jack 1 Jack 2 Jack 3 Jack 4 Jack 5 Jack 6 1,1-1,2 1,3-1,4 1,5-1,6 1,7-1,8 1,9-1,10 1,11-1,12 Jack 7 Jack 8 Jack 9 Jack 10 Jack 11 Jack 12 2,1-2,2 2,3-2,4 2,5-2,6 2,7-2,8 2,9-2,10 2,11-2,12
6.4.4.1 TRANSMISIÓN DE DATOS
Debido a que los conectores son RJ45, los pares de sensores de cada módulo fueron enviados en uno mismo, de ésta forma se obtuvo la siguiente configuración para cada cable:
1 2 3 4 5 6 7 8 CB C NB A BA V N VB VDD S - - - S - VDD
En el panel de patcheo:
1 2 3 4 5 6 7 8 NB A BA C CB V N BV - - - S VDD S - VDD
6.4.4.2 TRANSMISIÓN DE AUDIO
En el panel de patcheo dedicado al audio, únicamente existe una configuración para que todo lo que se conecte detrás de éste pase directamente a la parte frontal, que representa la posición 4 de unos botones deslizables contenidos en la parte posterior. Las otras posiciones permiten realizar puentes en tierras y señales, dependiendo de la aplicación requerida en cuanto a transmisión y recepción de señales de audio.
Debido a las configuraciones del módulo de los sentidos, se tuvo que etiquetar canal por
canal y asignar nuevos números, con orden lógico y que permitiera una conexión amigable, como es de suponerse se etiquetó del 1 al 12, teniendo únicamente que modificar el orden de conexión en el módulo de los sentidos, al cual también se tuvo que etiquetar y especificar vía manual de operación el orden de los canales de reproducción y evitar un mensaje inadecuado en una zona específica.

96
6.4.5 INSTALACIÓN DE SENSORES Y ALTAVOCES
La cuestión más interesante en cuanto la instalación de los sensores, es el hecho de la orientación y calibración de éstos. En capítulos anteriores ya especificamos cuál sería la configuración del sensor y la zona que se dejó activa para delimitar el campo de detección de cada sensor y, ya en conjunto, de cada módulo. Una situación muy interesante se presentó al estar realizando pruebas de funcionamiento al medio día y fue el que cuando existía mucho sol, a pesar de que los sensores contienen una película polarizada, existían módulos que se activaban únicamente por la presencia de los rayos solares.
Definitivamente, una activación por rayos solares, no es, en lo absoluto, un buen funcionamiento y realmente representa una especia de fracaso en la elección de los sensores, sin embargo, no es un proceso delicado el que existan reproducciones debido a la presencia del sol y la opción de modificar la orientación de las casetas que presentaban este problema era inoperante puesto que se encontraban al paso.
Un punto a favor es que el Museo de la Biodiversidad a pesar de estar a la intemperie, posee pequeño techo, elaborado de rejillas y plantas trepadoras, lo cual, dentro de un tiempo no muy lejano, una vez que se concluyan las obras, limitaran el acceso de los rayos solares y evitaran considerablemente reproducciones no deseadas.
Cabe mencionar que de todo esto se le comunicó al CCCCM antes de firmar el contrato; dentro de la licitación se hacía mención de que un sensor más caro, con especificaciones diferentes hubiese brindado un mejor funcionamiento, sin embargo, el presupuesto limitaba considerablemente dicha elección.
Los altavoces no presentaron problema alguno, puesto que venían con sus bases de fábrica y las conexiones no representaron mayor problema, puesto que con un buen cautín y una soldadura adecuada se pudo completar la instalación.
6.4.6 CONEXIÓN DEL MÓDULO DE LOS SENTIDOS
Posteriormente de haber realizado pruebas de conexión, tanto en datos y audio, con el objetivo de conocer y evitar la presencia de un corto circuito, procedimos a ínter conectar el panel de patcheo y el módulo de los sentidos.
Con el módulo descubierto, hicimos verificación de que no existiera un corto en la fuente de alimentación ni en los dispositivos, que todas las tierras de los plugs y los jacks estuvieran debidamente conectadas al gabinete, así como la existencia de algún falso contacto en soldaduras frías o cables que no fueron bien ponchados.
Se procedió a energizar el módulo de los sentidos y automáticamente, como se había estipulado en el programa, comenzó la reproducción, no en todos los canales, puesto que dependía directamente de que se hubieses cumplido con la secuencia de reproducción, de tal suerte que si por cuestiones de transmisión de datos un sensor 2 era activado antes de un sensor 1, entonces no existiría reproducción alguna de mensajes, lo cual es un resultado favorable a la lógica implementada para la detección y reproducción de mensajes.
Como es de nuestro conocimiento todos los sensores ejecutan un tiempo de inicialización en el cual tendrán el relevador activado y enviarán la señal de presencia al módulo de los sentidos, por su parte el LCD, desplegó adecuadamente los datos y el funcionamiento de los botones para acceder al menú y desplazarse en él, fue adecuado.

97
En un principio, no se había enviado factor de atenuación a los canales, estaban en el máximo volumen, lo cual, por petición del CCCCM se modificó para que el volumen de inicialización fuera menor, lo cual se puede observar en el programa de rpvoice.asm, al inicio de las variables de volumen para cada canal, se anexa a estos el valor de 0x14.
6.4.6.1 PRUEBAS DE FUNCIONAMIENTO
Para concluir, se realizaron diversos recorridos en ambos sentidos. Como era de esperarse, algunos sensores detectaban el movimiento en otras locaciones y se tuvo que modificar la configuración de las zonas activas del sensor, aunado a esto, algunos sensores, se les tuvo que modificar la orientación para que no invadieran zonas muy cercanas a ellos y que detectaran un poco antes la presencia de los individuos.
Afortunadamente el sistema de ventilación, después de modificar el programa para que
se reprodujeran todos los mensajes simultáneamente durante aproximadamente una hora, evitó satisfactoriamente calentamientos en los amplificadores y en general en todo el módulo.
Después de haber tenido el módulo funcionando durante más de 24 horas, las opciones
del menú no presentaban algún tipo de alteración y todas las funciones de detección y reproducción eran adecuadas.
Después de la instalación en el mes de julio, nos presentamos a la inauguración que dio
el C. Melquíades Morales, entonces gobernador del estado de puebla, en el mes de noviembre y fue muy satisfactorio ver un funcionamiento adecuado en el módulo de los sentidos, sensores y actuadores del sistema; no existía alguna interferencia adicional después de la instalación y en el momento de que los agentes públicos hicieron el recorrido a través del módulo, éste funcionó correctamente.

98
6.4.6.2 DIAGRAMA ARQUITECTÓNICO DE INSTALACIÓN.
Ilustración 6-11.- Diagrama Arquitectónico de Instalación.
MÓDULO CENTRAL
ENTRADASALIDA

99
Módulo Sensor - Altavoz
Tendido de Cableado
Ruta a Seguir Notas: La ubicación de los módulos sensor-altavoz fue sugerida por nuestra cuenta, sin embargo, ya en la práctica, algunas rutas de cableado eran inoperantes pues pasaban muy cerca del tendido de energía eléctrica, de tal suerte que se evitaron esas rutas reestructurando la guía para evitar ruido en la línea ocasionado por el suministro eléctrico.

100
7. ESTUDIO COSTO BENEFICIO
Para este efecto debemos ser claros en dos aspectos fundamentales marcados en las teorías de Fontaine 1984:27, en donde delimita puntualmente la existencia de evaluaciones privadas y sociales de viabilidad en todos los proyectos.
En primer término, el CCCCM ha elaborado un estudio de viabilidad en todos los proyectos a realizar en el Museo de la Biodiversidad, y se tiene entendido que una vez concluido e inaugurado, las bondades tecnológicas implementadas, así como la innovación en el contenido cultural y formal del recorrido, pondrán al Estado de Puebla en los reflectores nacionales al tener proyectos especiales para personas de capacidades diferentes, tecnología nacional en aplicaciones específicas de museos y aporte socio-cultural a la población.
El CCCCM estima que el número de visitantes en la zona de los Fuertes de Loreto y
Guadalupe aumentará un 5% mensual desde su apertura, esperando así que el número de visitantes al Museo de la Biodiversidad se encuentre en 300 personas promedio en días de operación. El gobierno del estado de puebla subsidiará el mantenimiento de éste los primeros 6 meses de operación y la entrada será de 5 pesos por persona, posteriormente la entrada al recinto costará 20 pesos y será gratuita para los estudiantes y adultos mayores.
Es así como el CCCCM en conjunto con el Gobierno del Estado de Puebla han pronosticado que la recuperación de la inversión se dará aproximadamente en 4 años, pero estiman que el impacto turístico podría disminuir este periodo a 3 años.
Ahora bien, las prioridades del CCCCM son sociales y apuntan más a poder mantener
el área de recreación que ha recuperar la inversión y convertir la zona de los Fuertes en un ingreso importante monetario, según comentó la directora del CCCCM Lorena Zedillo Ponce de León, reasaltando también que la aplicación de recursos a la innovación cultural y tecnológica ubicaría a México y en especial al estado de Puebla en un referéndum a nivel latinoamericano y nos pondría en el mapa a nivel internacional.
En el caso de nosotros, los análisis son completamente diferentes, pues la evaluación va
mas encaminada al aporte monetario que la cuestión social. El punto más crítico a analizar es que debido a que no existirá una licitación abierta y
como ya se ha destinado el presupuesto en su totalidad, el desarrollo del proyecto se hará mediante los remanentes y ahorros del CCCCM, que suman un total de $60,000.00.
Debido a las políticas tributarias, el dinero efectivo a disposición es de $52,174 pesos
00/100 M.N. con un tiempo de entrega de 60 días con llave en mano. A continuación se estructura el arrojo de materiales de manera generalizada para el
conocimiento de los tiempos de elaboración del proyecto.

101
CONCEPTO T/JORNAL JORNAL C.M.O. C.D. C.PARCIAL CANT. TOTAL
DISEÑO ELECTRÓNICO
ISD 1.666666667 $700.00 $1,166.67 $25.00 $1,191.67 1 $1,191.67LATCH 0.416666667 $700.00 $291.67 $25.00 $316.67 1 $316.67VOLUMEN DIGITAL 1.541666667 $700.00 $1,079.17 $25.00 $1,104.17 1 $1,104.17LCD 0.729166667 $700.00 $510.42 $25.00 $535.42 1 $535.42
TARJETA MADRE 3.125 $700.00 $2,187.50 $25.00 $2,212.50 1 $2,212.50DISEÑO ELÉCTRICO FUENTES DE ALIMENTACIÓN 0.25 $350.00 $87.50 $980.00 $1,067.50 1 $1,067.50SISTEMA DE VENTILACIÓN 0.125 $350.00 $43.75 $200.00 $243.75 1 $243.75DISEÑO MECÁNICO $0.00
GABINETE 1.5625 $350.00 $546.88 $1,900.00 $2,446.88 1 $2,446.88CUBIERTAS DE MÓDULO 0.03125 $350.00 $10.94 $120.00 $130.94 12 $1,571.25MODOULO SENSOR ALTAVOZ 0.020833333 $350.00 $7.29 $300.00 $307.29 12 $3,687.50
PATCH PANEL 0.041666667 $350.00 $14.58 $680.00 $694.58 1 $694.58CIRCUITOS IMPRESOS TARJETA DE GRABACIÓN 0.5 $0.00 $0.00 $950.00 $950.00 1 $950.00TARJETA DE REPRODUCCIÓN 0.5 $0.00 $0.00 $1,200.00 $1,200.00 1 $1,200.00
TARJETA MADRE 0.75 $0.00 $0.00 $1,200.00 $1,200.00 1 $1,200.00ARMADO DE TARJETA TARJETA DE GRABACIÓN 0.5 $350.00 $175.00 $700.00 $875.00 1 $875.00TARJETA DE REPRODUCCIÓN 0.5 $350.00 $175.00 $1,300.00 $1,475.00 1 $1,475.00
TARJETA MADRE 1 $350.00 $350.00 $1,400.00 $1,750.00 1 $1,750.00PRUEBAS TÉCNICAS DETECCIÓN DE SECUENCIA 0.25 $700.00 $175.00 $0.00 $175.00 1 $175.00REPRODUCCIÓN DE MENSAJES 0.125 $700.00 $87.50 $0.00 $87.50 1 $87.50SISTEMA DE VENTILACIÓN 0.041666667 $700.00 $29.17 $0.00 $29.17 1 $29.17GRABACIÓN MENASAJES 1 $600.00 $600.00 $1,300.00 $1,900.00 1 $1,900.00INTEGRACIÓN DE PROYECTO 5 $1,000.00 $5,000.00 $3,250.00 $8,250.00 1 $8,250.00
$12,538.02 $15,605.00 $28,143.02 $32,963.54
PREUSPUESTO ING. NETO TIEMPO TOTAL
20 DÍAS
$52,174.00 $19,210.46
Tabla 7-1 .- Lista de materiales

102
8. CONCLUSIONES Como era de esperarse, no todo el diseño planteado fue el más adecuado, conforme
fuimos enfrentando los problemas y brindando soluciones, nos percatarnos de que pudimos haber dado soluciones más sencillas, o mas bien dicho, que nos ayudaran a hacer todo un poco más sencillo; tal es el caso de que se planteó una sola tarjeta que contuviese todos los canales de reproducción, lo cual es muy práctico, pero en el momento de ejecutar pruebas de funcionamiento y localización de fallas resulto ser un tanto complicado, puesto que se conocía que existía una falla pero se tenía que deliberar entre 12 conjuntos de dispositivos iguales y no se sabía si era una soladura fría, si era un falso contacto, etc.
Este tipo de decisiones fueron costosas en cuanto a tiempo, ya que una detección de fallas nos costó a veces hasta 3 días encontrarla, cuando lo único que nos estaba generando un problema era la falta de continuidad en una de las pistas.
Otro problema muy crítico se dio al momento de contratar a una persona ajena a la empresa para la elaboración de los circuitos impresos. Por un lado, los presupuestos eran muy ilógicos conforme a lo que habíamos cotizado en inicio sin los esquemáticos y una vez que estos fueron presentados a los proveedores de servicios, modificaron su punto de vista, que sin la presencia de un contrato, modificando los precios.
Existieron errores en cuanto al diseño de las tarjetas, puesto que algunas pistas, debido a la falta de espacio entre componentes, eran muy pequeñas y al momento de hacer uso de la serigrafía, fue realmente complicado para el maquilador de la tarjeta. Esto se hubiese evitado eligiendo módulos separados y hacer tarjetas independientes, relacionadas a través de un bus principal generado en una especia de tarjeta madre donde se contendrían ambos microcontroladores y todos los puertos de transmisión de datos.
Las pistas tan pequeñas y los planos de tierra elegidos tan grandes, ocasionaron que existieran, debido al proceso utilizado para la elaboración del circuito impreso, cortos circuitos en la tarjeta y que fueron realmente muy complicados de detectar puesto que son puntos muy pequeños de cobre que no alcanzaron a reaccionar con los ácidos o que simplemente al momento de poner la serigrafía, esta se dispersó en zonas no deseas.
Estamos concientes de que un sensor diferente hubiese conseguido un funcionamiento un tanto más eficiente, sin embargo las limitantes de presupuesto por parte del CCCCM fueron el factor determinante en la elección de dispositivos y tipos de cables. De esto deriva una cuestión muy interesante en cuanto a la solución de problemas, puesto que nos dimos cuenta que muchas teorías son estrictas y, definitivamente, correctas, puesto que los cálculos elaborados y todo el marco teórico implementado dio resultados satisfactorios, sin embargo, ya en la práctica, muchas de las teorías no se podrán llevar a cabo plenamente debido a factores externos, ya sea por la obra civil en la que se está operando o por cuestiones de presupuesto.
En cuanto a programación, muchos fueron los retos, bien sabemos que un problema posee soluciones infinitas y en este caso se intentó dar la solución más práctica a nuestro punto de vista y según la lógica de programación personal; los dispositivos utilizados para el control de volumen, reproducción de mensajes, representaron un reto y que en el momento de diseñar y estar haciendo pruebas de funcionamiento, se quemaron, se rompieron y nos dejaron ver que el trabajar con dispositivos poco comerciales genera

103
complicaciones al momento de fallas, pues en tratar de conseguirlos se pierde mucho tiempo que ya en este momento se traduce directamente en pérdida de ingresos.
El proyecto del módulo de los sentidos nos deja una experiencia muy grata en cuanto al
diseño y materialización de un proyecto no escolar, de un proyecto que conlleva una responsabilidad legal, en todo el marco jurídico que posee un contrato de servicios por parte de un gobierno a una empresa. Es realmente un salto enorme a lo que deja de ser una calificación y se convierte en un modus vivendi y nos hace concientes de la capacidad y el nivel académico brindado en el Instituto Politécnico Nacional.

104
9. BIBLIOGRAFÍA - ALFREDO RIFALDI. Dimensionamiento de cables de distribución [en línea].
Universidad Nacional de La Plata. Facultad de ingeniería. 6 de febrero de 2006. = http://www.ing.unlp.edu.ar/sispot/libros/pr/dimcab/dimcab.htm =
- AUDIO PROFESIONAL “DR. PROAUDIO”. Longitudes máximas de cables para altavoz [en línea]. Biblioteca de Refuerzo para Sonido profesional. Web master anónimo.= http://www.doctorproaudio.com/doctor/temas.htm =
- IGNACIO ZARIÑAÑA. Conceptos generales de audio y acústica [en línea]. Universidad Politécnica de Madrid. Departamento de Ingeniería Audiovisual y Comunicaciones. 12 de febrero de 2006. = http://www.diac.upm.es/asignaturas/sistaudio/TFC%20Ignacio/index.html =
- JUAN MANUEL RAMIREZ MARTINEZ. Cálculo de filtros pasivos [en línea]. Universidad de Barcelona. Facultad de Ingeniería. 26 de enero de 2006 = http://www.secundaria.us.es/juamarmar/CALCULO%20DE%20FILTROS/filtrospasivos.html =
- MEGAWATIOS. Dimensionamiento de cables - criterio del volumen mínimo. MEGAWATIOS septiembre de 1980.
- MICROCHIP. Datasheet [en línea]. MICROCHIP TECHNOLOGY INC. Julio de 2006. = http://www.microchip.com/stellent/idcplg?IdcService=SS_GET_PAGE&nodeId=2046 =
- MICRIUM, INC. Notas de aplicación AN-1005, 74HC259. MICRIUM 2001. - MICROCHIP TECHNOLOGY INC. Microchip PIC 16F87X. DS30292A.
MICROCHIP 1999. - NATIONAL SEMICONDUCTOR CORPORATION. Notas de aplicación LM1971
overture. NATIONAL SEMICONDUCTOR septiembre de 2002. - PETER OUWEHAND. How to control a HD44780 - based character LCD [en línea].
The industry standard character LCD. 25 de Julio de 2006. = http://ouwehand.net/~peter/lcd/lcd.shtml =
- PHILIPS SEMICONDUCTOR. Especificaciones de producto 74HC259. PHILIPS 25 de noviembre de 1997.
- RAÚL ÁLVAREZ. Cálculo y verificación de filtros pasivos [en línea]. Universidad Nacional de La Plata. Facultad de Ingeniería. 25 de enero de 2006. = http://www.ing.unlp.edu.ar/sispot/libros/pr/filtros/filtcalc.htm =
- ROBERT F. COUGHLIN & FREDERICK F. DRISCOLL. Amplificadores Operacionales Y Circuitos Integrados Lineales. 4ª. Ed. Editorial Prentice Hall, 1993 (Traducido de la 4ª. Edición en inglés de OPERATIONAL AMPLIFIERS & LINEAR INTEGRATED CIRCUITS)
- WEBOPEDIA. What is Cat 5 [en línea]. Jupiter Web Networks. Julio de 2006. = http://www.webopedia.com/TERM/C/Cat_5.html =
- WINDBOND COMPANY. Series ISD4003, dispositivos de grabación y reproducción de voz de 4, 5, 6 y 8 minutos de duración. WINDBOND junio de 2000

105
10. GLOSARIO DE FIGURAS ILUSTRACIÓN 2-1. – DIAGRAMA DE TERMINALES DEL MICROCONTROLADOR MICROCHIP 16F877A..................... 14 ILUSTRACIÓN 2-2.- DESCRIPCIÓN DE TERMINALES.............................................................................................. 15 ILUSTRACIÓN 2-3.- REGISTROS .......................................................................................................................... 16 ILUSTRACIÓN 2-4 .- INTERFACE SERIAL PERIFÉRICA............................................................................................ 20 ILUSTRACIÓN 2-5.- MODO MAESTRO/ESCLAVO................................................................................................... 22 ILUSTRACIÓN 2-6 .- DIAGRAMA DE TIEMPOS (MM) .......................................................................................... 23 ILUSTRACIÓN 3-1.- DIAGRAMA DE TIEMPOS ISD ................................................................................................ 40 ILUSTRACIÓN 3-2 .- MODO ANA + Y ANA - ....................................................................................................... 41 ILUSTRACIÓN 3-3.- FORMATO DEL COMANDO DE 8 BITS...................................................................................... 42 ILUSTRACIÓN 3-4 .- CICLO DE GRABADO, REPRODUCCIÓN Y PARO. ..................................................................... 42 ILUSTRACIÓN 3-5 .- EJEMPLO FILTRO PASA BAJAS ............................................................................................. 43 ILUSTRACIÓN 3-6 .- FILTRO PASA BAJAS ............................................................................................................ 44 ILUSTRACIÓN 3-7 .- FILTRO PASA ALTAS ............................................................................................................ 45 ILUSTRACIÓN 3-8 .- EJEMPLO FILTRO PASA BANDA............................................................................................ 45 ILUSTRACIÓN 3-9 .- FILTRO PASA BANDA ........................................................................................................... 46 ILUSTRACIÓN 3-10 .- HIPASS Y BODE ............................................................................................................... 46 ILUSTRACIÓN 3-11.- LOPASS Y BODE ............................................................................................................... 47 ILUSTRACIÓN 3-12 .- BANDPASS Y BODE ......................................................................................................... 47 ILUSTRACIÓN 3-13 .- BANDPASS RESONANTE Y BODE. ..................................................................................... 48 ILUSTRACIÓN 3-14.- BANDREJ Y BODE ............................................................................................................ 48 ILUSTRACIÓN 3-15 .- EJEMPLO CON FILTRO Y PASA BANDA ............................................................................... 49 ILUSTRACIÓN 3-16 .- FILTRO PASIVO EN DISEÑO................................................................................................ 49 ILUSTRACIÓN 3-17 .- FILTRO ACTIVO EN DISEÑO ............................................................................................... 50 ILUSTRACIÓN 3-18 .- FUNCIÓN ATENUADOR ...................................................................................................... 51 ILUSTRACIÓN 4-1 .- NORMA T568B................................................................................................................... 53 ILUSTRACIÓN 5-1 .- CARACTERÍSTICAS SENSOR DE PRESENCIA ........................................................................... 59 ILUSTRACIÓN 5-2 .- DIAGRAMA DE TIEMPOS SENSOR .......................................................................................... 61 ILUSTRACIÓN 5-3 .- DETECCIÓN DE SECUENCIA ................................................................................................. 63 ILUSTRACIÓN 5-4 .- DIAGRAMA DE FLUJO, DETECCIÓN DE SECUENCIA. ............................................................... 64 ILUSTRACIÓN 5-5 .- DETECCIÓN DE SECUENCIA EN ASM .................................................................................... 66 ILUSTRACIÓN 5-6.- REPRODUCCIÓN TRAS DETECCIÓN ........................................................................................ 68 ILUSTRACIÓN 5-7.- ESQUEMÁTICOS TARJETA DE CONTROL................................................................................. 70 ILUSTRACIÓN 6-1.- TARJETA DE REPRODUCCIÓN Y GRABACIÓN.......................................................................... 82 ILUSTRACIÓN 6-2 .- PCB ................................................................................................................................... 82 ILUSTRACIÓN 6-3.- TARJETA DE CONTROL ......................................................................................................... 83 ILUSTRACIÓN 6-4 .- TARJETA DE CONTROL PCB ................................................................................................ 84 ILUSTRACIÓN 6-5 .- TARJETA DE REPRODUCCIÓN............................................................................................... 85 ILUSTRACIÓN 6-6.- TARJETA DE REPRODUCCIÓN PCB ....................................................................................... 86 ILUSTRACIÓN 6-7.- GABINETE............................................................................................................................ 87 ILUSTRACIÓN 6-8 .- MEDIDAS 1 ......................................................................................................................... 88 ILUSTRACIÓN 6-9.- MEDIDAS 2 .......................................................................................................................... 89 ILUSTRACIÓN 6-10.- MEDIDAS 3 ........................................................................................................................ 90 ILUSTRACIÓN 6-11.- DIAGRAMA ARQUITECTÓNICO DE INSTALACIÓN. ............................................................. 98

106
11. GLOSARIO DE TABLAS TABLA 2-1.- BANCOS ......................................................................................................................................... 15 TABLA 2-3 . - FUENTE DE RELOJ AD.................................................................................................................. 33 TABLA 3-1 .- TABLA DE VERDAD CD4067B ........................................................................................................ 35 TABLA 3-2 .- MODOS DE OPERACIÓN 74HCT259 .............................................................................................. 36 TABLA 3-3 .- TABLA DE FUNCIÓN 74HCT259 .................................................................................................... 37 TABLA 3-4 .- CÓDIGO DE PROGRAMACIÓN DEL ISD ........................................................................................... 38 TABLA 3-5 .- TIPOS DE ISD................................................................................................................................ 41 TABLA 4-1 .- AMORTIGUAMIENTO E IMPEDANCIA VS LONGITUD .......................................................................... 55 TABLA 4-2 .- PÉRDIDA DE ENERGÍA Y NIVEL VS. LONGITUD ................................................................................. 55 TABLA 4-3 .- LONGITUD, IMPEDANCIA, CALIBRE Y PÉRDIDA ............................................................................... 57 TABLA 5-1 .- LONGITUD Y ALTURA VS. DETECCIÓN............................................................................................. 58 TABLA 5-2 .- NORMALIZACIÓN DE CALIBRACIÓN ................................................................................................. 60 TABLA 5-3.- CÓDIGO LCD ................................................................................................................................ 75 TABLA 6-1.- PERFORACIONES ............................................................................................................................ 91 TABLA 7-1 .- LISTA DE MATERIALES ...................................................................................................................101