development of an autonomous mobile buoy - casmy.fit.edu/~swood/thesis adam outlaw.pdf ·...
TRANSCRIPT

Computerization of an Autonomous Mobile Buoy
by
Adam Stuart Outlaw
Bachelor of Science Ocean Engineering
Florida Institute of Technology May 2006
A thesis submitted to Florida Institute of Technology
in partial fulfillment of the requirements for the degree of
Master of Science in
Ocean Engineering
Melbourne, FL August 2007

© 2007 Adam S. Outlaw All Rights Reserved
The author grants permission to make single copies _______________________

We the undersigned committee hereby approve the attached thesis
Computerization of an Autonomous Mobile Buoy
by
Adam Stuart Outlaw
_____________________________________ Stephen L. Wood, Ph.D., P.E. Assistant Professor Ocean Engineering Major Advisor _______________________________________ Héctor Gutiérrez, Ph.D., P.E. Associate Professor Mechanical and Aerospace Engineering _______________________________________ Geoffrey W.J. Swain, Ph.D. Professor Ocean Engineering and Oceanography
_______________________________________ George A. Maul, Ph.D. Professor & Department Head Department of Marine and Environmental Systems

iii
Abstract
Title: Computerization of an Autonomous Mobile Buoy
Author: Adam Stuart Outlaw
Major Advisor: Stephen L. Wood, Ph.D., P.E.
A new type of autonomous research buoy has been developed to perform
physical, biological and environmental impact studies in estuarine waters. It may also be
used to detect early warning signs of Harmful Algal Blooms (HABs) and outbreaks of
other potentially harmful organisms. The vehicle is especially necessary in regions that
cannot be accessed by research vessels and where sampling is difficult, dangerous,
expensive, or not amenable to manually collected data. Data collection in the Indian
River Lagoon (IRL) is most commonly performed by volunteers, students and researchers
under conditions that are often hot, humid, mosquito-infested, and threatened by
lightning storms.
The Autonomous Mobile Buoy (AMB) acquires similar research data to other
autonomous systems, such as, CoastalObservation’s (CoastalObs) Ocean-Atmosphere
Sensor Integration System (OASIS) (Virginia, USA) and Robotic Marine Systems’ Surface
Craft for Oceanographic and Undersea Testing (SCOUT) (Gray, Maine, USA). The unique
feature of this system is the capability to autonomously moor at each way-point. The
purpose of the AMB is to self-navigate to multiple locations, anchor and then acquire
data.

iv
This thesis presents the design, construction and field trials of AMB. The vehicle
is equipped with two MicroChip PIC microcontrollers and a Lippert Cool RoadRunner II
PC/104 small form factor single board computer running LabVIEW® 6.1 to operate the
control system. The autonomous control of the vessel is designed to use a USGlobalSat
MR-350 Global Positioning System (GPS), an EZ-Compass digital compass, and dual Minn-
Kota 50-lb thrust trolling motors to navigate between way-points. Upon reaching the
way-point, the buoy is programmed to anchor using a Minn-Kota Deckhand 40 winch.
The AMB is presently equipped with the Davis Weather Monitor II which continuously
measures and records meteorological data. After a predetermined time the system is
programmed to raise the anchor and move to the next way-point. The AMB is powered
by dual solar panel charging system and three 50 amp hour deep cycle batteries that
enable continuous operations.

v
Table of Contents
List of Keywords ................................................................................................................ viii List of Figures ....................................................................................................................... ix List of Tables ........................................................................................................................ xi List of Abbreviations ........................................................................................................... xii Acknowledgements ........................................................................................................... xiii Dedication ......................................................................................................................... xiv 1. Introduction .................................................................................................................. 1
1.1 Purpose of an Autonomous Buoy ............................................................................... 1 1.2 Existing Technology .................................................................................................... 4
1.2.1 Submerged Buoys ................................................................................................ 4 1.2.2 Surface Mooring Systems & Buoys ...................................................................... 5 1.2.3 NOMAD ................................................................................................................ 8 1.2.4 Current Research Methods ............................................................................... 10 1.2.5 OASIS ................................................................................................................. 11 1.2.6 SCOUT ................................................................................................................ 12
2. Background of AMB Project ........................................................................................... 14 2.1 Design Concept ......................................................................................................... 14 2.2 Hull Selection ............................................................................................................ 15
2.2.1 Discus ................................................................................................................. 16 2.2.2 Boat Hull ............................................................................................................ 17
2.3 Hull Design ................................................................................................................ 17 2.3.1 Model ................................................................................................................ 18 2.3.2 Construction ...................................................................................................... 21
2.4 Coatings .................................................................................................................... 23 2.5 Naval Architecture .................................................................................................... 27 2.6 Theoretical Electrical Current Demand Calculations ................................................ 29 2.7 Propulsion System .................................................................................................... 33
2.7.1 Electric Current Draw Estimates ........................................................................ 33 2.7.2 Steering.............................................................................................................. 36 2.7.3 Propulsion .......................................................................................................... 37
2.8 Winch and Anchor System ....................................................................................... 38 2.8.1 Electric Current Draw Estimates ........................................................................ 40 2.8.2 Operation .......................................................................................................... 40
2.9 RC System ................................................................................................................. 41 2.10 GPS System ............................................................................................................. 42 2.11 Charge System ........................................................................................................ 44
2.11.1 Batteries .......................................................................................................... 44

vi
2.11.2 Solar Panels ..................................................................................................... 45 2.12 Weather Station ..................................................................................................... 46
2.12.1 Weather Station Display and Software ........................................................... 47 2.12.2 Instruments ..................................................................................................... 50
3. AMB Autonomous System .............................................................................................. 52 3.1 AMB Operation ......................................................................................................... 52 3.2 Motor Control ........................................................................................................... 56 3.3 Location and Heading ............................................................................................... 59
3.3.1 GPS..................................................................................................................... 60 3.3.2 Compass Heading .............................................................................................. 62
3.4 Mooring System ....................................................................................................... 63 3.5 Lighting System ......................................................................................................... 67 3.6 Autonomous Test Results ......................................................................................... 69
4. Conclusions ..................................................................................................................... 71 5. Recommendations for Future Research ......................................................................... 73
5.1 Control Systems Updates ......................................................................................... 73 5.2 Cameras .................................................................................................................... 74
5.2.1 Surface Camera ................................................................................................. 74 5.2.2 Subsurface Camera ............................................................................................ 74 5.2.3 Subsurface Video Cameras ................................................................................ 75
5.3 SONAR ...................................................................................................................... 77 5.3.1 Surface Collision Control ................................................................................... 77 5.3.2 Subsurface Collision Control .............................................................................. 77 5.3.3 Subsurface Acoustic Identification .................................................................... 78 5.3.4 Depth Sounder .................................................................................................. 78
5.4 Current Meter........................................................................................................... 79 5.5 Wave Measurement System .................................................................................... 79 5.6 Wireless Communication – Radio & Cell Phone Technology ................................... 80 5.7 Scientific Research Platform and Winch .................................................................. 80 5.8 Scientific Instrumentation ........................................................................................ 81
5.8.1 CTD .................................................................................................................... 81 5.8.2 SCOUT® ............................................................................................................... 82
5.9 Bilge Pumps .............................................................................................................. 83 References .......................................................................................................................... 84 Appendix A – Timeline of the AMB .................................................................................... 87 Appendix B – Buoy Specifications ...................................................................................... 88 Appendix C - Pro/Engineer® Renderings ............................................................................. 89 Appendix D - ProSurf® Drawings ......................................................................................... 94 Appendix E - Technical Drawings........................................................................................ 97 Appendix F – Motor Control Specifications ...................................................................... 111 Appendix G – MR-350 GPS Specifications ........................................................................ 112 Appendix H – Energy Budget ............................................................................................ 114 Appendix I – Exported Weatherlink Data ......................................................................... 115 Appendix J – LabVIEW® VI Control System ....................................................................... 118 Appendix K – Motor Control PIC Code ............................................................................. 124

vii
Appendix L – GPS Raw Data ............................................................................................. 125 Appendix M – EZ-Compass 3 Specifications ..................................................................... 126 Appendix N – Original Anchor Control PIC Code .............................................................. 127 Appendix O – Updated Anchor Control PIC Code ............................................................ 129

viii
List of Keywords
Autonomous Mobile Buoy (AMB)
Buoy
Department of Marine and Environmental Systems (DMES)
Florida Institute of Technology
HyperTerminal
LabVIEW® (National Instruments Corporation)
PC/104 (Small form factor single board computer)
Pro/Engineer® (Parametric Technology Corporation)
ProSurf® (New Wave Systems, INC.)
Self Mooring
Solar Panel
Underwater Technologies Laboratory (UTL)
Watch Circle
Weather Station

ix
List of Figures
Figure 1 AMB Sea Trial [4] .................................................................................................... 3 Figure 2 Subsurface buoy diagram [2] .................................................................................. 5 Figure 3 Shallow water surface moorings [3] ....................................................................... 7 Figure 4 NOMAD schematic [3] ............................................................................................ 9 Figure 5 OASIS [4] ............................................................................................................... 11 Figure 6 OASIS network diagram [10] ................................................................................ 12 Figure 7 Sea trial of SCOUT [13] ......................................................................................... 13 Figure 8 NDBC moored buoys [8] ....................................................................................... 16 Figure 9 Foam model on CNC ............................................................................................. 18 Figure 10 Initial watertight test .......................................................................................... 22 Figure 11 Hull preparation at East Coast Sandblasting ...................................................... 23 Figure 12 Hull prepared for first coating application ......................................................... 24 Figure 13 Interior coated with Amercoat 235 .................................................................... 24 Figure 14 Exterior coated with Amercoat 235 ................................................................... 25 Figure 15 Buoy coated and ready for test trial ................................................................... 26 Figure 16 Modified ProE® model (top view) [7] .................................................................. 28 Figure 17 Modified ProE® model (bottom view) [7] ........................................................... 28 Figure 18 Electric Speed Controller .................................................................................... 36 Figure 19 Motor mounts with motors ................................................................................ 37 Figure 20 Internal view of motor mounts .......................................................................... 38 Figure 21 Crab Claw Anchor ............................................................................................... 38 Figure 22 Deckhand 40 ....................................................................................................... 39 Figure 23 Control diagram .................................................................................................. 41 Figure 24 Winch controls circuit ......................................................................................... 42 Figure 25 MR-350 GPS unit mounted on deck ................................................................... 43 Figure 26 12 volt deep cycle marine battery ...................................................................... 44 Figure 27 Solar panel mounted on deck at stern of buoy .................................................. 45 Figure 28 All components of Davis Weather Monitor II [18] ............................................. 46 Figure 29 Weather station display monitor ....................................................................... 47 Figure 30 Weatherlink data logger [18] ............................................................................. 48 Figure 31 Weatherlink 4.04 instruments graphic June 5, 2007 ......................................... 49 Figure 32 Weatherlink 4.04 graph of outside and inside temperature May 31, 2007 ....... 49 Figure 33 Weatherlink 4.04 NOAA weather summary May 24 – 31, 2007 ........................ 49 Figure 34 Junction box for Weather Monitor II .................................................................. 50 Figure 35 External sensor housing barometer, temp sensor, and humidity sensor for Weather Monitor II ............................................................................................................ 51 Figure 36 Anemometer for Weather Monitor II ................................................................ 51 Figure 37 Flowchart of autonomous control system ......................................................... 53

x
Figure 38 Driver board schematic ...................................................................................... 57 Figure 39 EZ-Compass 3 digital compass ............................................................................ 59 Figure 40 Anchor board schematic..................................................................................... 64 Figure 41 Winch with Hall Effect sensor and magnets ....................................................... 66 Figure 42 Davis Mega Light ................................................................................................ 68 Figure 43 Navigation light with mount ............................................................................... 68 Figure 44 Thalassia testudinum (Turtle Grass) in Biscayne Bay ......................................... 75 Figure 45 HAB near Cape Rodney, New Zealand [20] ........................................................ 76 Figure 46 "Smart CTD" ........................................................................................................ 81 Figure 47 SCOUT® ................................................................................................................ 82 Figure 48 Front Panel ....................................................................................................... 118 Figure 49 Sequence 0 Block Diagram Anchor "down" off ................................................ 119 Figure 50 Sequence 1 Block Diagram Anchor “up” off ..................................................... 119 Figure 51 Sequence 2 Block Diagram Motors off ............................................................. 119 Figure 52 Sequence 3 Block Diagram Control System ...................................................... 120 Figure 53 GPS SubVI Front Panel ...................................................................................... 121 Figure 54 GPS SubVI Block Diagram ................................................................................. 122 Figure 55 Compass SubVI Front Panel .............................................................................. 123 Figure 56 Compass SubVI Block Diagram ......................................................................... 123

xi
List of Tables
Table 1 ProSurf® Hydrostatic Results .................................................................................. 20 Table 2 ProE® results of AW and S ....................................................................................... 28 Table 3 Current calculation variables ................................................................................. 29 Table 4 Area measurements for wind resistance ............................................................... 32 Table 5 Wind force calculation results ............................................................................... 32 Table 6 Trolling motor electrical current demands ............................................................ 35 Table 7 Winch current demand .......................................................................................... 40 Table 8 Voltage and signal range comparison .................................................................... 56 Table 9 Motor driver signals ............................................................................................... 58 Table 10 Desired heading conditions ................................................................................. 62 Table 11 Buoy Specs ........................................................................................................... 88 Table 12 DuraTrax IntelliSpeed 8T Racing Reverse ESC Specs [17] .................................. 111 Table 13 Specifications of MR-350 [23] ............................................................................ 112 Table 14 Energy Budget .................................................................................................... 114 Table 15 Lab test results of Weatherlink 4.04 on May 31, 2007...................................... 115 Table 16 EZ-Compass 3 Specs [24] ................................................................................... 126

xii
List of Abbreviations
AMB Autonomous Mobile Buoy
CTD Conductivity, Temperature, and Depth
DMES Department of Marine and Environmental Systems
DTR Data Terminal Ready
ESC Electric Speed Control
GHS General HydroStatics (Creative Labs, Inc.)
GPS Global Positioning System
GUI Graphical User Interface
HAB Harmful Algal Bloom
LabVIEW® Laboratory Virtual Instrumentation Engineering Workbench
NDBC National Data Buoy Center
NOAA National Oceanic and Atmospheric Administration
NOMAD National Oceanographic Meteorological Automatic Device
OASIS Ocean-Atmosphere Sensor Integration System
ProE® Pro/Engineer
ROV Remotely Operated Vehicle
RTS Ready to Send
SCOUT Surface Craft for Oceanographic and Undersea Testing
SST Sea Surface Temperature
USV Unmanned Surface Vehicle
UTL Underwater Technology Laboratory (DMES lab)
VI Virtual Instrument

xiii
Acknowledgements
Since I arrived on campus at Florida Institute of Technology in August 2002 I have been embraced by a community of close friends and colleagues. If not for this sense of belonging, I would not be where I am today. Many people have contributed to this project in more ways than hands-on assistance. Without these people, this project would have never been completed. First, I would like to thank Dr. Andrew Zborowski for convincing me to attend Florida Tech from the first time we met and Dr. George Maul for his invaluable support of my academic accomplishments. I would like to thank my parents, Ronnie and Debbie Outlaw, for funding my endeavors over the last 5 and a half years and giving me the support and love I needed to make it through the tough times. Also, I would like to thank my wife, Kendra Outlaw, for being there to encourage me to finish what I started. Many thanks go to Zak Pfeiffer, Michelle Rees, Mehul Patel, Anthony Tedeschi, and Maila Sepri for their invaluable help in the design and implementation of the buoy and its many parts. I also need to thank Bill Battin for his help with the design and construction, Bill Bailey for his welding skills, and Larry Buist for his electronics expertise. Without them, the AMB is still an idea waiting to be designed. I would like to thank Dr. Stephen Wood for pushing me to the end to finish the project that I thought would never end. I would also like to thank Dr. Héctor Gutiérrez and Dr. Geoffrey Swain for giving me advice on controls and navigation. I want to express my appreciation to the Link Foundation for helping fund my graduate studies. I would like to thank Dr. Eric Thosteson for teaching me more than I ever wanted to know about programming and electronics and reminding me that things have to be done now, not later. I would like to thank Nakul Saran for mentoring me in the ways of Ocean Engineering, Residence Life, and life in general. I would like to thank Coach Bill Macom for giving me the opportunity to balance my life and get away from the stress of academics. Finally, I would like to thank my friends and family who have been by my side throughout this process. The distractions, guidance, and support were all valued.

xiv
Dedication
This work is dedicated to two special people in my life that I wish were here to enjoy the
happiness that I am feeling now.
To my Papa Hollingsworth, for always telling me that I could do anything
and…
To my Mema Outlaw, for always putting her whole heart into everything.

1
1. Introduction
1.1 Purpose of an Autonomous Buoy
A new type of autonomous research buoy has been developed to perform
physical, biological and environmental impact studies in estuarine waters. It may also be
used to detect early warning signs of Harmful Algal Blooms (HABs) and outbreaks of
other potentially harmful organisms. The vehicle is especially necessary in regions that
cannot be accessed by research vessels and where sampling is difficult, dangerous,
expensive, or not amenable to manually collected data. Data collection in the Indian
River Lagoon (IRL) is most commonly performed by volunteers, students and researchers
under conditions that are often hot, humid, mosquito-infested, and threatened by
lightning storms.
The Autonomous Mobile Buoy (AMB) acquires similar research data to other
autonomous systems, such as, CoastalObservation’s (CoastalObs) Ocean-Atmosphere
Sensor Integration System (OASIS) (Virginia, USA) and Robotic Marine Systems’ Surface
Craft for Oceanographic and Undersea Testing (SCOUT) (Gray, Maine, USA). The unique
feature of this system is the capability to autonomously moor at each way-point. The
purpose of the AMB is to self-navigate to multiple locations, anchor and then acquire
data.
The Autonomous Mobile Buoy (AMB), which was originally designed and built
without autonomous control by undergraduate ocean engineering students1 at Florida
Institute of Technology (
1 Zak Pfeiffer, Michelle Rees, Safia Tappan, Derek Tepley

2
Appendix A – Timeline of the AMB), is controlled by two Microchip PIC microcontrollers
and a Lippert Cool RoadRunner II PC/104 computer that is programmed with LabVIEW®
6.1 to continuously measure and record scientific data. The AMB allows for larger survey
areas than the typical stationary research buoy and it allows for more cost effective
surveying than the typical research vessel and crew because the computer is
programmed with a LabVIEW® Virtual Instrument (VI) to use a USGlobalSat MR-350
Global Positioning System (GPS), an EZ-Compass digital compass, and dual Minn-Kota 50-
lb thrust trolling motors to navigate between way-points. Upon reaching its location, the
buoy is programmed to moor and unmoor by controlling its anchor with a Minn-Kota
Deckhand 40 winch. The dual solar panel charging system allows the AMB to be
powered indefinitely ensuring continuous data collection.
A collision control system, current meter, wave measurement system, sea grass
surveying cameras, hydrophones for acoustic sound identification, depth observation,
CTD, turbidity sensor, SCOUT, Harmful Algal Bloom (HAB) detection system, and wireless
communication for real time data logging and navigation will be added in the next phase
of this project and is not included in the objective.
A typical moored buoy is designed and constructed with a specific purpose such
as, recording wave data, meteorological data, current data, sea surface data, and other
oceanographic measurements that can be collected by a stationary buoy. The US
National Data Buoy Center (NDBC) maintains approximately 70 moored buoys [1]. These
buoys act as weather stations that collect “wind speed and direction, air temperature
and pressure, wave conditions, and visibility [2].” There are other buoys called marker
buoys that are designed to mark channels, port entrances, subsurface pipelines, anchor
positions, wrecks, and other submerged hazards [2]. There are approximately 24,000
buoys deployed and maintained by the Coast Guard in US waters alone [3].
A mobile buoy can be used to perform many of these same tasks, therefore,
dramatically reducing the number of buoys necessary. The AMB (Figure 1) can perform
these tasks more efficiently and cost effectively than the typical moored buoy because of
its lack of necessary human involvement. Therefore, the same data recorded by the

3
Figure 1 AMB Sea Trial [4] Photo courtesy of Dr. Stephen Wood, Florida Institute of Technology
NDBC could be recorded at multiple locations by one buoy navigating itself to various
locations. By using the AMB, meteorological, chemical, biological, and physical data (i.e.
water quality, plankton studies, seagrass studies, weather anomalies, current, salinity,
and temperature) could be recorded while the buoy is navigating to its next location or
while moored. Therefore, if a researcher needs water quality data from a particular
transect in the near-shore region, an AMB can provide that data along with pertinent
meteorological data without the need of human interference. This is more time and cost
efficient than by performing transects in a research vessel that requires the cost of gas
and manpower.
The AMB could also be used as dynamic channel markers. Since the buoy is
capable of changing location and direction and determining water depth, it can

4
continually reposition itself. With the addition of a kinematic GPS, the AMB can
dynamically hold its position without being moored, therefore, the issue of having a large
watch circle is eliminated and the buoy can change location with the dynamically
changing environment of the channels. With real time positioning there is greater
accuracy in marking the channel boundaries as they change due to sediments filling in
the channel over time.
1.2 Existing Technology
There are a variety of submerged and surface buoys that currently exist on the
world’s waters. However, these buoys, no matter the purpose, are moored using one of
the many types of mooring systems. The multiple types of buoys and mooring systems
are discussed in the following sections.
1.2.1 Submerged Buoys
Submerged buoys, rather than surface buoys, are typically used to measure
current flow because a surface buoy feels the effect of the wave motion skewing the
collected data. The buoy is typically placed in a very active environment where the
current flow can be measured without the interference of waves. Since submerged
buoys do not feel any wave movement if they are set 100 meters below the surface, the
data collected by the current meters is much more accurate [3]. These buoys are used
when measurements taken on the surface or near the surface are not necessary.
When a submerged buoy is designed, a clump anchor resting on the sea floor
that is attached to a string of glass ball floatation units is typically used. The
instrumentation needed for the measurements, as shown in Figure 2 [2], is attached to

5
Figure 2 Subsurface buoy diagram [2]
the tether that can be released from the anchor via an acoustic release. The submerged
mooring system is very common because of its’ cost and ease of deployment, and due to
it being a very resilient mooring system. Submerged buoys with this type of mooring are
able to withstand vertical movement of several hundred meters [3]. Even with the
advantages of submerged buoys, the cost of deploying buoys at every location where
data collection is needed is very expensive.
1.2.2 Surface Mooring Systems & Buoys
Surface buoys are typically used when a buoy needs to be in contact with a base
through satellite or wireless communication, surface data is needed, or the buoy is
needed as a visual aid for navigational purposes. Surface buoys are designed in various
shapes and sizes depending upon the purpose of the buoy. Each shape has its positive
and negative attributes, but those attributes change with sea-state [3]. The design of the
mooring systems of surface buoys does not vary with each type of buoy. There are
different mooring systems for coastal buoys and deepwater buoys.
There are three types of mooring systems for surface buoys with variations of
each depending upon the sea conditions in which the buoy is deployed: chain slack
mooring, chain and an elastic mooring, and taut surface trimoor system. There are also

6
three main types of permanently moored surface buoys: spar, discus, and boat hull. The
most basic and most common type of mooring is the chain slack mooring shown in
Figure 3a. As can be seen, the buoy is attached to a typical clump anchor at the seafloor
by a chain that is attached to a rigid bridle at the buoy. However, if the depth reaches
150 feet or more, some of the chain can be replaced with wire rope and heavy chain to
reduce the mooring cost as shown in Figure 3b. These moorings are very reliable and
apply enough tension to accommodate the tide and wave action while also protecting
against damage due to fishing operations and biological attacks such as shark bites [3].
However, the chain/wire rope mooring method also allows the buoy to make large watch
circles because of the amount of slack in the chain or cable, which can create a problem
for accurate measurements. A watch circle is defined by the length of the mooring chain
and is the radius within the buoy can be expected to swing [5].
The second most common mooring uses a chain and an elastic mooring line to
supply enough tension to keep the buoy from making large circles. The elastic line allows
the buoy to move up and down with the tide and waves while remaining under tension
at all times. The most common version of this mooring system is an anchor on the
seafloor with a chain attached to the elastic mooring line which is then attached to
another chain from the buoy as shown in Figure 3c. However, as depth increases two
more lines can be added to reduce the size of the watch circles made by the buoy. This
method can be seen in Figure 3d.

7
Figure 3 Shallow water surface moorings [3]
The best method for mooring large disc buoys in shallow water is the taut
surface trimoor system, which can be seen in Figure 3e. This method is used in order to
minimize the size of the watch circle made by the buoy. Since the lines are always in
tension, the buoy has less chance of overturning and spinning which is common with disc
buoys. However, the mooring lines are still vulnerable to fishing operations using drag
nets.

8
Spar buoys have small reserve buoyancy and are designed to free float. This
creates a problem when attempting to moor this type of buoy. The smaller spars are
typically moored with the help of a submerged buoy and a rigid buoyant tether line as
shown in Figure 3f [3]. Larger spar buoys that have a draft close to the water depth are
capable of being single point moored in shallow water as seen in Figure 3g [3]. The spar
buoy is not a feasible design option for this project and is not an option during the design
selection. Discus and boat hull buoys are discussed in Chapter 2.2 Hull Selection.
1.2.3 NOMAD
The National Oceanographic Meteorological Automatic Device (NOMAD) is the
design of the US Navy [6]. The desire to develop this particular buoy stemmed from the
low cost involved with building and maintaining an aluminum hull buoy. Also, the boat
hull shape combined with the mooring mount (Figure 4) is very stable in severe seas [7].
This ship hull design also allows for quick rotational response while decreasing the
chances of capsizing as there are no recorded incidents of capsizing of this buoy [8]. The
aluminum hull, along with proper anti-corrosion methods in use, also allows for longer
missions and less maintenance [7].

9
Figure 4 NOMAD schematic [3]
The NOMAD buoy contains many features that collect very useful data that is
transferred by a satellite connection to a database on land. The data that is collected
consists of “wind speed and direction, air temperature, barometric pressure, wave
height, direction and period, and compass heading [6].” The Navy designed this ship-like
buoy for an offshore data collection program in the 1940s [7]. However, the US National
Data Buoy Center, operated by the National Oceanic and Atmospheric Administration
(NOAA), purchased excess hulls and modified them with new payloads and implemented
these buoys into its fleet of permanently moored 10 and 12 meter buoys. The NOMAD
buoy was impressive enough for Canada’s Atmospheric Environment Service to begin
using the system along the coasts of Newfoundland and Nova Scotia [9].

10
1.2.4 Current Research Methods
The current research methods for coastal studies include research cruises,
manual data collection, and autonomous vehicles. However, research cruises are very
costly, time consuming, non efficient, and environmentally disastrous. A research vessel
cannot enter the shallow waters of the coastal regions and in order to launch a research
cruise requires an immense amount of money, time, and resources. While a research
cruise is out collecting data, the environment is being destroyed by the gasoline, oil, and
fumes coming from the vessel. However, manual data collection is also not time
efficient. The dangers of manually collecting data due to weather (lightning, rain, and
heat), wildlife (alligators and sharks), and disease carrying bugs (mosquitoes) make this
option less desirable than a research cruise. Therefore, autonomous vehicles were
created to rid researchers of the existing problems with data collection. An autonomous
vehicle is capable of collecting the same data as a research vessel and from manually
collecting data, but an autonomous vehicle can perform these measurements with
minimal human interaction, in shallow regions, and without any danger to the
researcher. SCOUT and OASIS are two systems that were developed as research tools to
battle the problems of collecting oceanographic, meteorological, and environmental
data. However, without the ability to autonomously moor, these systems are not
capable of collecting accurate data without a need for post processing adjustments. The
AMB, with its ability to moor at the desired location, can collect accurate data on site
without any adjustments needed for movement. Therefore, the AMB is an important
step in the ever changing research world.

11
1.2.5 OASIS
The closest vehicle related to an autonomous mobile buoy currently being
developed is the OASIS that has been developed, tested, and deployed by CoastalObs on
November 15, 2006 [10] (Figure 5).
Figure 5 OASIS [4]
The concept of OASIS is very similar to that of the AMB but OASIS is a vehicle that is not
capable of being autonomously moored. CoastalObs is developing “a fleet of solar-
powered surface autonomous vehicles” that will be used in conjunction with NASA’s
Small Business Innovation Research program [10]. The OASIS platform is capable of
supporting various meteorological and oceanographic instruments that will measure and
record a minimum of the following data: Air Temperature, Wind Velocity, Relative
Humidity, Atmospheric Pressure, Sea Surface Temperature, Sea Surface Salinity, and new
instruments are being developed for HAB (Harmful Algal Bloom) detection and radiance
measurements [10]. Also, like the AMB, OASIS is powered by solar panels and an electric
motor. However, OASIS, unlike the AMB, can be remotely controlled by satellite
communication (Figure 6).

12
Figure 6 OASIS network diagram [10] OASIS is an autonomous vehicle that has the same general hull form as the AMB;
however, the instrumentation and purpose of OASIS truly show the similarities between
the two vehicles.
1.2.6 SCOUT
Another vehicle similar to the AMB is Robotic Marine Systems’ SCOUT (Figure 7).
The development of SCOUT was a joint effort between Massachusetts Institute of
Technology, the Office of Naval Research, Woods Hole Oceanographic Institute, and
Robotic Marine Systems [12]. SCOUT is a 10 foot long High Density Polyethylene (HDPE)
kayak outfitted with “off the shelf components” to ensure a flexible, inexpensive design
[12]. The system includes a “Main Vehicle Computer, Battery System, Propulsion and
Steering Systems, Radio Control and Wifi Communications System, GPS, Compass and
Payload Expansion Slots” and can be purchased for $27,580 fully developed [12].

13
Figure 7 Sea trial of SCOUT [13]
Additionally, side scan sonar can be attached at the keel of the kayak to produce images
of the seafloor. However, this system does not include a mooring system. The SCOUT
can reach a maximum speed of 5 knots (5.75 mph) and can cruise at 3 knots (3.45 mph)
for up to 8 hours using a 12V 100 amp-hour battery.

14
2. Background of AMB Project
2.1 Design Concept
The Autonomous Mobile Buoy (AMB) is a state-of-the-art project concept that is
being developed in order to introduce a new method of near shore research. The first
step in the design process for this project is to build a remotely operated Unmanned
Surface Vehicle (USV) that meets the needs of the scientific researcher using the vehicle.
In order to accomplish the design goal of developing an autonomous research buoy, the
system was initially designed as a remote control prototype of the final product. The
design concept for the final autonomous system is to enable any researcher to mount
instruments on board specific to the task at hand. However, the design also includes
several permanently mounted research instruments that will be discussed in Chapter 5.
Recommendations for Future Research.
The specifications of the design stated that the buoy must first be remotely
controlled for navigation and be able to moor and unmoor while also collecting
meteorological data. The idea of developing an autonomous mobile self mooring buoy
stem from the difficulty of moving permanently moored buoys to new locations for data
collection. The typical moored buoy must be transferred to a new site by using a vessel
that includes a major cost for the vessel, the fuel, the manpower required to run the
vessel, and all of the unforeseen mishaps that can occur on a seafaring research vessel.
However, by developing the AMB, researchers can collect data easily from multiple
locations in the coastal and lagoon regions rather than estimating from the nearest buoy
or spending the time and money to deploy a research cruise. Thus, a mobile buoy,
remote controlled or autonomous, is desperately needed to ease the burden of
collecting data at desired locations.
As mentioned, the buoy design criteria include the ability to moor and unmoor
itself and collect meteorological and oceanographic data. However, there are many

15
other aspects involved when attempting to convert the remote controlled system to an
autonomous system. The process of the conversion will be discussed in detail in Chapter
3. AMB Autonomous System, but the design concept will be mentioned at this time.
To meet the requirements of the overall project, the AMB needs an overhaul
from the remote system to a newly developed autonomous system. The requirements
for the autonomous system are more detailed than the original design objectives. In
order for the buoy to pass the required specifications, it needs to be capable of
navigating to predetermined GPS locations in a coastal ocean environment. Upon arrival
at the specified locations the buoy must be able to moor and unmoor itself to record
scientific data over an extended period of time. While the buoy is in transit, it must
abide by any navigational laws with working navigation lights and an anchor light that
switches on when moored. The entire time the buoy is underway, meteorological data
will be collected and stored using a Davie Weather Station II. This particular weather
station can collect and store humidity and temperature inside the buoy and outside,
wind speed and direction, and external barometric pressure. In addition to the
meteorological instruments, a depth sounder will periodically measure and record the
depth. Once on location scientific instruments, e.g., CTD and Turbidity sensors will
measure and record conductivity, temperature, depth, and turbidity of the water. All of
this data will be recorded on board the buoy for later retrieval. After the completion of
these measurements, the buoy must be capable of unmooring itself, turning on the
navigation lights and navigating to the next location. The buoy must be able to navigate
up to two mile transects in one day and be 100% self sustained for at least one month.
This requires the use of multiple batteries and a dual solar panel charging system.
2.2 Hull Selection
The process of determining which hull design to use began with constructing a
list of possible options and immediately eliminating any nonviable choice. The final list
of choices for hull design included the disc buoy and boat hull buoy. This section will
discuss the differences between each hull type along with the positive and negative

16
attributes of each. During the selection process, the team of undergraduate students
choosing the hull shape had to constantly think of the final design criteria of the project,
not just the first phase. According to the NDBC, there are two main types of hull designs
that are the most commonly used as moored buoys that can be seen in Figure 8. The
Coastal Oceanographic Line-of-Sight (COLOS) buoy and Coastal buoys were not
considered in the selection process because they are typically used as support buoys,
Figure 8 NDBC moored buoys [8]
2.2.1 Discus
The discus buoy comes in three different sizes: three meters, 10 meters, and 12
meters. The 10 and 12 meter buoys are very large and typically used in rough conditions.
The 12 meter buoy is more stable in these conditions than the 10 meter buoy. The 10
meter buoy is known to capsize in rough seas [8]. The three meter buoy is much smaller
and cannot be used in the same conditions as the larger buoys, but even in lighter
conditions, it does not have a very strong survival rate [8]. The discus buoy has known

17
stability issues and is not the most efficient shaped hull for a mobile buoy. The round
sides do not “cut” through the water surface like a mobile buoy should in order to reduce
the power needed to quickly maneuver the buoy.
2.2.2 Boat Hull
During the decision process, the boat hull buoy was the most logical choice
considering its name. The efficiency of using a boat hull shape for a mobile buoy is
obvious considering the buoy will maneuver similar to a recreational marine vessel. The
boat hull buoy being used by the NDBC is called the NOMAD. The NOMAD is six meters
long by three meters wide and is very stable in wave action due to the mono-hull design.
As mentioned, the NOMAD has never capsized and is a perfect design for a mobile buoy.
The basic design of the boat hull buoy is similar to that of a ship. Therefore, the only
drawback in using this design was the size of the actually NOMAD. However, it was
decided to only use the design as a guide and develop a unique design that would allow
for quick manufacturing for future projects.
2.3 Hull Design
The hull for the AMB was chosen based on the design criteria set forth
previously. The design criteria for the hull design were determined after the hull shape
was selected. The AMB is a prototype buoy that must be small, lightweight, cost
efficient, easily assembled, and retain all of the seaworthiness of larger buoys. The
design is similar to the NOMAD buoy, except the AMB is approximately seven feet long
which is only slightly larger than 1/3 of the length of a NOMAD. The full table of the AMB
specifications is shown in Appendix B – Buoy Specifications. The AMB is constructed
from 11 flat aluminum panels that were bent and welded into place (causing slight
convolution on four of the panels) while the NOMAD is built as a normal curved mono-
hull vessel.

18
2.3.1 Model
AMB was first designed in the Pro/Engineer® Software (ProE®). After a few trial
designs, the final hull design was completed and a model of approximately 1/5 the size of
the design criteria was constructed to show the basic hull form. The ProE® drawings
(Appendix C - Pro/Engineer® Renderings) were converted to Mastercam 9.0 to generate
a program to be used on the CNC machine. This model was then manufactured using
high density foam on the CNC machine (Figure 9) in the Florida Tech Machine Shop by
Zak Pfeiffer. After a bit of hand work was completed to touch up the final model, a
scaled keel was attached to the bottom of the hull, the anchor well was carved, and a
layer of two part epoxy paint was applied to the outside.
Figure 9 Foam model on CNC Photo courtesy of Zak Pfeiffer, Florida Institute of Technology
With the model complete, testing was performed to determine if the design
characteristics allowed for a stable vessel. The model was placed in the Florida Tech
Wave Tank in the Surf Mechanics Laboratory and an anchor line with a ratio of three to

19
one compared to the depth was attached in the anchor well. The buoy was then subject
to scaled waves and was completely stable and responded as expected.
To fully characterize the vessel, naval architectural theoretical calculations were
needed. Unfortunately, the general ProE® software does not possess this functionality
so; the model drawings were converted to GHS and ProSurf® Naval Architecture
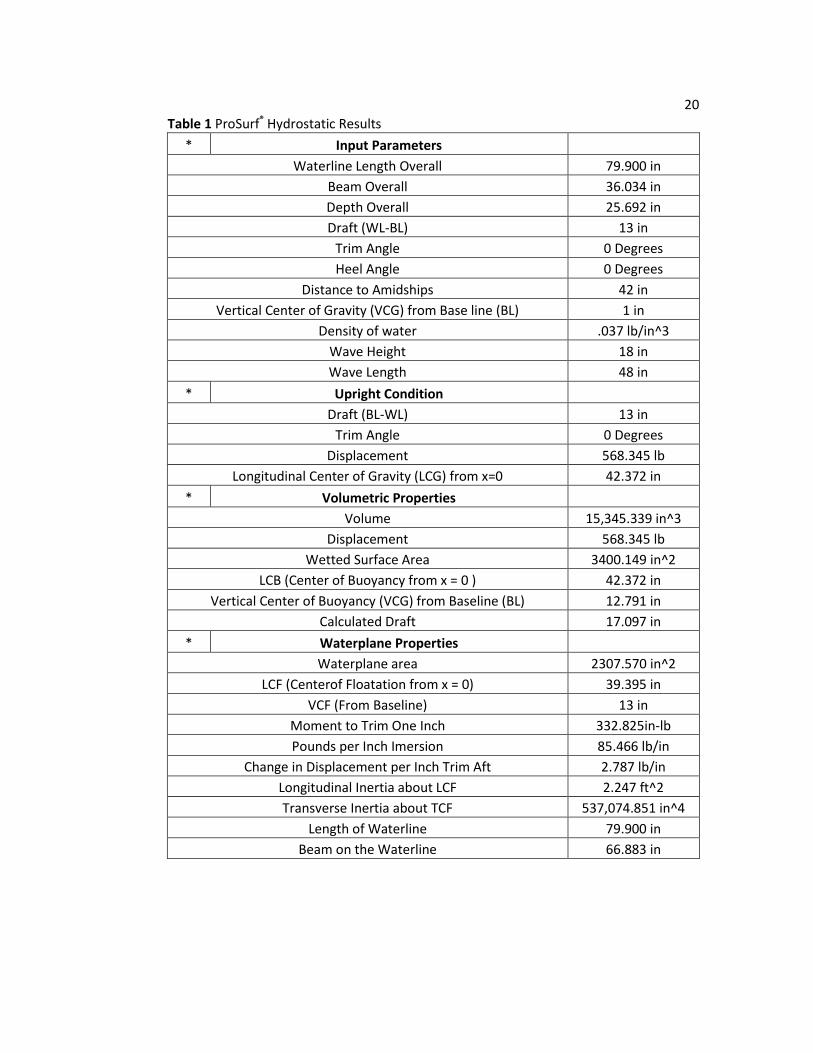
Software. The results, as seen in Appendix D - ProSurf® Drawings, show the water lines
and station lines with respect to the hull lines. ProSurf® also calculated the hydrostatic
characteristics such as total resistance on the hull and it also calculated drafts in
specified sea conditions (Table 1). With all of the model design complete, the material
was selected and construction commenced.
20
Table 1 ProSurf® Hydrostatic Results
* Input Parameters
Waterline Length Overall 79.900 in
Beam Overall 36.034 in
Depth Overall 25.692 in
Draft (WL-BL) 13 in
Trim Angle 0 Degrees
Heel Angle 0 Degrees
Distance to Amidships 42 in
Vertical Center of Gravity (VCG) from Base line (BL) 1 in
Density of water .037 lb/in^3
Wave Height 18 in
Wave Length 48 in
* Upright Condition
Draft (BL-WL) 13 in
Trim Angle 0 Degrees
Displacement 568.345 lb
Longitudinal Center of Gravity (LCG) from x=0 42.372 in
* Volumetric Properties
Volume 15,345.339 in^3
Displacement 568.345 lb
Wetted Surface Area 3400.149 in^2
LCB (Center of Buoyancy from x = 0 ) 42.372 in
Vertical Center of Buoyancy (VCG) from Baseline (BL) 12.791 in
Calculated Draft 17.097 in
* Waterplane Properties
Waterplane area 2307.570 in^2
LCF (Centerof Floatation from x = 0) 39.395 in
VCF (From Baseline) 13 in
Moment to Trim One Inch 332.825in-lb
Pounds per Inch Imersion 85.466 lb/in
Change in Displacement per Inch Trim Aft 2.787 lb/in
Longitudinal Inertia about LCF 2.247 ft^2
Transverse Inertia about TCF 537,074.851 in^4
Length of Waterline 79.900 in
Beam on the Waterline 66.883 in

21
2.3.2 Construction
The construction of AMB was an entire project itself. Originally, the AMB was to
be constructed by bending 10 out of 11 1/8” 5050-H32 aluminum sheets with a CNC
press. However, the company contracted to make these bends was not able to carry out
their guarantee due to time constraints on larger scale projects. Therefore, the design
drawings were taken to Don Bell Inc. machine shop of Melbourne, FL. This company
determined it would be able to construct the design with a few modifications. By using
ProE®, the dimensions of each panel were found and a series of technical drawings
(Appendix E - Technical Drawings) were completed for each section of the buoy. Florida
Institute of Technology’s machinist Bill Bailey and ocean engineering undergraduate
student Zak Pfeiffer used these drawings to lay out the aluminum in the Florida Tech
Machine Shop to the nearest thousandth of an inch. The prepared aluminum was taken
to Don Bell Inc. where a ten foot hydraulic shear was used to cut most of the panels.
Once the cuts were complete, a brake was used to bend 10 panels into the correct
shape.
The cut and bent panels were then pieced into place and tack welded together to
ensure proper fitting of each angle before the desired shape was finally Tig welded
together. With the hull form finally constructed, a keel was added from the back of the
anchor well to the stern of the buoy (approximately four feet) with a maximum height of
eight inches and ¼’ thick. The keel is designed to alleviate the roll of the buoy and help
with directional control. The hull was then tested in a nearby pond to double check the
welded seams (Figure 10).

22
Figure 10 Initial watertight test
The final version of the hull was constructed mostly out of 5052-H32 aluminum
with only a few pieces of T6 marine grade aluminums as well. These aluminum grades
were chosen for their marine grade properties and their ability to be welded to each
other. The final dimensions of the buoy are seven feet long, three feet wide, and two
feet deep as shown in Appendix E - Technical Drawings. The anchor well is
approximately 13.5 inches wide, 12.5 inches long, and one foot from the bow.

23
2.4 Coatings
Corrosion control is an important aspect to consider when designing for the
marine environment. Metals rust very easily in water unless properly protected from the
elements. The corrosion control methods employed on the AMB began with
sandblasting the interior and exterior (Figure 11, Figure 12) of the hull in order to apply a
two-part epoxy paint. Ameron’s Amercoat 235 was applied to the interior and exterior
of the hull as an initial layer of protection. Then two different Interlux paints were
applied to the hull, keel, and motor casings and a SeaGlossPro paint was applied to the
deck. The Amercoat 235 was used as a base layer to prepare the aluminum for painting
because the anti-fouling paint used on the keel, motor casings, and submerged portion
of the hull contains copper. The mixture of copper and aluminum will cause corrosion to
occur immediately when placed in water.
The hull was sandblasted and prepared for the first coat of paint by East Coast
Sandblasting in Melbourne, FL.
Figure 11 Hull preparation at East Coast Sandblasting Photo courtesy of Zak Pfeiffer, Florida Institute of Technology

24
Figure 12 Hull prepared for first coating application Photo courtesy of Zak Pfeiffer, Florida Institute of Technology
Figure 13 Interior coated with Amercoat 235
Photo courtesy of Zak Pfeiffer, Florida Institute of Technology

25
Figure 14 Exterior coated with Amercoat 235
Photo courtesy of Zak Pfeiffer, Florida Institute of Technology
Upon completion of the sandblasting, the Amercoat 235 was applied to the
entire hull. Two coats of this two-part epoxy paint is sufficient corrosion control for the
buoy, however, it is not aesthetically pleasing. The Amercoat 235 was only available in
Oxide Red at the time of ordering (Figure 13, Figure 14). Therefore, the exterior of the
hull was painted with two different coatings from Interlux. Below the waterline, Interlux
UltraTM with Biolux® was used. According to the product description, Ultra™ is the most
effective paint in warmer waters where land runoff and slime-causing algae occur at the
highest rates [14]. Two coats of paint were required, but the fast drying technology
allowed for both coats to be applied in the same day. Ultra™ contains a very high loading
of cuprous oxide and uses Biolux® to block slime [14]. The paint was applied below the
waterline to the hull, keel, and motor casings to prevent the development of slime,
weed, and shell fouling. The application process included lightly sanding the Amercoat
235 in order to provide a rough base for the Inlertux paint to adhere. The blue Ultra™
was applied from the keel up to the designed waterline in order to create a line for the
application of Interlux Brightside Polyurethane top paint.
The Brightside paint was used because of its ease of application and advanced
technology one-part polyurethane. The Brightside contains Teflon® that increases
resistance to staining and abrasion while decreasing the cleaning time. Two coats of the

26
yellow polyurethane were applied after lightly sanding the Amercoat 235. This topside
paint was only used above the waterline.
The last coating application was the white SeaGlossPro deck paint. This was also
chosen because of its ease of application and durable, high gloss polyurethane
technology. The white was chosen to decrease the amount of heat absorbed through
the deck in order to keep the interior of the hull as cool as possible. Three coats of the
deck paint were required to completely cover the aluminum deck. Also, the deck paint
was used to paint the winch box and the stands for the solar panel. The fully coated
AMB is shown in Figure 15.
Figure 15 Buoy coated and ready for test trial
Photo courtesy of Dr. Stephen Wood, Florida Institute of Technology

27
2.5 Naval Architecture
The calculation of the hull speed for a displacement vessel is simply an estimate
of the maximum velocity capable before the resistance from the hull shape increases to a
point that forward motion is inefficient [7]. The hull speed is calculated by using
Equation [1] and the assumption that the waves alongside the vessel have a wavelength
(λ) that is equal to the length of the vessel (L) [15].
Equation [1] VHull = [(g*L)/(2B)]1/2
VHull = hull speed
g = gravitational acceleration
L = length of vessel
B = beam of vessel
The hull speed for AMB is determined with the following values.
g = 32.2 ft/s2
L = 7 ft
B = 3 ft
VHull = 6.1 ft/s
The hull speed is slightly greater than the design speed (4 ft/sec or just under 3 mph)
that was considered during the design phase of the project. This occurs because of the
amount of power that will be applied for the vessel to efficiently travel along its two-mile
transects.
The calculation of the water plane area and the total wetted surface area are a
little more complex than the hull speed calculation. The water plane area (AW) and the
total wetted surface area (S) are based on the design waterline, which is 13 inches above
the lowest point of the hull. The design water line creates an imaginary horizontal plane
as a reference for other measurements.

28
Because of the complexity of taking these measurements, the ProE® models were
used to determine the two values in question. The original model was modified to only
include the portion of the vessel that will always be below the surface as shown in Figure
16 and Figure 17.
Figure 16 Modified ProE® model (top view) [7]
Figure 17 Modified ProE® model (bottom view) [7] The results of the Pro/Engineer
® modifications and calculations are shown in
Table 2 Table 2 and were calculated without including the material missing from
the anchor well. All other naval architecture calculations were performed using ProSurf®
software and the results were shown in Table 1 (p. 20).
Table 2 ProE® results of AW and S
Description Value
Total Surface Area of Water Plane (AW) 9.76 ft2
Total Wetted Surface Area (S) 16.5 ft2

29
2.6 Theoretical Electrical Current Demand Calculations
The electrical current demand for each motor is an important aspect to consider
during the design process of an autonomous vehicle. Since the buoy is in the shape of a
boat hull, ProSurf® naval architecture software is capable of producing the Total
Resistance in various sea states. The theoretical calculations are performed in calm seas
at the design speed of 4 ft/s at a travel distance of 2 miles. The Total Resistance was
calculated to be 44.496 lb at a 13 inch draft. With the Total Resistance value, a wide
range of calculations can be performed in order to better understand the amount of
current each motor will need to travel at 4 ft/s for 2 miles, or 10,560 ft. The results from
the calculations using Equation [2] and Equation [3] are shown in Table 3.
Equation [2] W = F*D
W = work (lb-ft)
F = force (lb)
D = distance (ft)
Equation [3] P = W/t
P = power (lb-ft/sec, watts)
W = work (lb-ft)
t = time (sec)
Table 3 Current calculation variables
Description Value
Design Speed 4 ft/sec
Draft 13 inches
Transect Distance (d) 10,560 feet
Total Resistance 44.496 lb
Travel Time per Transect 44 minutes = 2,640 seconds
Work (W) = Force (F) * Distance (d) 469,877.7 lb-ft
Power (P) = Work (W)/Time (t) 177.984 lb-ft/sec = 241.314 watts

30
The theoretical current calculation was performed after the values in Table 3
were calculated because current (I) is calculated by dividing power by voltage as shown
in Equation [4].
Equation [4] I = P/V
I = current (amps)
P = power (watts)
V = voltage (volts)
The buoy is powered by 12 volt deep cycle gel batteries so a value of 12 is always used
for V. The power (P) was calculated previously as 177.984 lb-ft/sec and converted to
241.314 watts. Therefore, the current is calculated as 20.109 amps. This is the amount
of current necessary to supply the required power from the set amount of voltage
provided for the buoy to travel 10,560 feet in 44 minutes at a 13 inch draft in calm seas.
Since there are two motors on board, each motor needs to be given 10.055 amps in
order for the two motors working simultaneously to move the buoy at the design speed
for the required distance in the specified amount of time. These same calculations were
also performed for wave heights of 2 feet with wavelengths of 4 feet to emulate choppy
river conditions, but the draft increased to 21.7 inches which is less then 4.5 inches
below the deck and the Total Resistance increased to 61 lb.
Further calculations were completed with the new wave conditions and the
design wind speed of 15 knots in order to determine the maximum current needed to
move the buoy along its transect at 4 ft/sec. The current estimate is calculated assuming
the buoy was moving into the wind, therefore, all of the surface area measurements (

31
Table 4) are estimations.

32
Table 4 Area measurements for wind resistance
Description Value
Solar Panel Box Front Area (1) 80 in2
Solar Panel Box Front Area (2) 91 in2
Winch Box Front Area 96 in2
Freeboard Front Area 390 in2
Total Area 657 in2 = 4.5625 ft2
The calculation of the resistance force due to wind (FWX) is calculated using the
Equation [5] [16].
Equation [5] FWX = (0.034)*CDX*VW2*AX
FWX = Force due to wind (lb)
CDX = Drag Coefficient
VW = wind speed (ft/sec)
AX = surface area (ft2)
The value of CDX is equal to 0.8 when the wind direction is 0° [16]. Therefore, the results
of the calculation are shown in Table 5.
Table 5 Wind force calculation results
Description Value
VW 15 kts = 17.26 mph = 25.32 ft/sec
CDX 0.8
VW2 641.1024 (ft/sec)2
AX 4.5625 ft2
FWX 7.956 lb
With the wind force resistance value calculated, the total amount of current theoretically
needed to drive the buoy can be calculated. The Total Resistance value calculated with
ProSurf® (61 lb) for 2 foot waves with a 4 foot wavelength is added to the wind resistance

33
value (7.956 lb) for a new Total Resistance of 68.956 lb. Using Equation [2], Equation
[3], and Equation [4] again, the total theoretical current required in order for the buoy to
complete the desired transect distance (2 miles) at the desired speed (4 ft/sec) is 14.320
amps per motor. This amount of current will effectively move the buoy through 2 foot
waves with 4 foot wavelengths into a 15 knot wind.
2.7 Propulsion System
The propulsion system for AMB includes two Minn Kota, 50-lb thrust Rip Tide,
trolling motors that are modified for this project. The motors are stripped of their
original control system and the shafts are trimmed to a more manageable length. The
original controls are replaced with Electronic Speed Controllers (ESCs) similar to those
used in remote control cars. For the remote control propulsion system, the ESCs are
connected to an RC system in order to steer the vessel with two motors and no rudder.
The remote control RC system will be further explained in Section 2.9 RC System.
2.7.1 Electric Current Draw Estimates
The trolling motors used for the propulsion system arrived with 5 different
forward speeds and 3 reverse speeds. Therefore, the motors were tested by connecting
each motor to a power supply and running the motor at the various operational levels to
determine the amount of current draw by each motor. The results of this test are shown
in

34
Table 6.

35
Table 6 Trolling motor electrical current demands
Forward Amps Reverse Amps
1 7 1 6.25
2 8 2 12
3 13 3 22
4 14.5
5 22
As previously calculated in Chapter 2.6 Theoretical Electrical Current Demand
Calculations, the electrical current demand for each motor to efficiently move the buoy
through calm seas at the desired speed and distance is 10.055 amps per motor.
Therefore, each motor running at level 3 is more than enough to accomplish this task.
These motors will provide excess power, which will move the buoy even faster than the
design speed but will also drain the batteries more quickly. The current demand on
rough days was calculated to be 14.320 amps. The motors will be required to run at level
4 to reach this amount of current demand. The current draw and current demand of
each system will become important when choosing the correct amp-hour battery which
will be discussed in Chapter 2.11 Charge System.
However, these calculations are only estimates and were determined to be too
small. The actual current draw in water, according to the Minn Kota representative, is 42
amps continuously on level 5. The reason for the discrepancy is still unknown, but a new
set of motor controllers were purchased to account for the error. With the correct ESCs
in place, the steering method was developed using a HiTec Laser 4 remote control
system.

36
2.7.2 Steering
The RC version of the AMB is steered by the HiTec Laser 4 remote control system
teamed with a DuraTrax IntelliSpeed 8T Racing Reverse ESC (Figure 18) on each motor.
Figure 18 Electric Speed Controller This combination allows for differential steering options that ESCs without reverse do
not. Also, differential steering is more responsive than steering with a rudder and one
motor. Therefore, the decision to use two motors was not only for the extra power
needed to complete transects at the desired speed but also so the steering would be
more efficient. With differential steering, one motor can be moving forward while the
second motor is pushing in reverse to make a tighter turn in order to avoid an obstacle or
stay on course. These particular motor controllers are capable of operating at 420 amps
continuously and a peak current of 1410 amps [17]. The specifications (Appendix F –
Motor Control Specifications) for these ESCs exceed the requirements of AMB and were
chosen for the factor of safety assumed by the large maximum operating current
compared to the operating current of the motors.

37
2.7.3 Propulsion
The Minn Kota 50-lb thrust Rip Tide trolling motors were initially chosen based
on the amount of thrusting power needed to move the buoy through rough seas. These
trolling motors are very rust resistant due to their premium grade alloy design. Also, the
propellers are designed with a weed-less wedge that cuts through weeds, lines, and
other small obstacles in order to ensure the motors do not get tangled in near shore
foliage or stray fishing lines.
These motors were modified for installation on the buoy. The housing that
contains the switches and gears for the various speeds of the motor were removed. This
left the wires and shafts open and the shafts were shortened to approximately 8 inches
in order for proper placement in the hull. After the modifications, the shafts were placed
into the motor mounts in the bottom of the hull and fastened to the cross beam with
hose clamps and epoxy (Figure 19, Figure 20).
Figure 19 Motor mounts with motors

38
Figure 20 Internal view of motor mounts
The motors are placed just behind the center of gravity with the propellers 4
inches from the keel. The motors were not placed directly at the center of gravity
because of the detrimental effect this design would have on long transects. Also, the
motors were not placed further back because the turning radius would be drastically
reduced. Therefore, the position of the motors is a compromise between the two
extremes in order to use the benefits of each for long travels and tighter turning radii.
2.8 Winch and Anchor System
The winch and anchor system are designed to lower and raise an 18-lb Crab Claw
Anchor (Figure 21) with a Minn Kota Deckhand 40 anchor winch (Figure 22).
Figure 21 Crab Claw Anchor

39
Figure 22 Deckhand 40
This particular winch was chosen because the system needs to be capable of
dropping and raising the anchor autonomously in the final design. The Deckhand 40
comes with 100 feet of 800-lb test nylon rope that is capable of lifting a 40-lb anchor
without the rope becoming tangled in the spool. The Deckhand 40 can lift up to 40 lbs of
weight; therefore, this same winch can be used to test other types of anchors (various
weights and sizes) and will not have a problem lifting the chosen 18-lb anchor unless it
gets caught on an obstacle on the seafloor. The Crab Claw Anchor was chosen because
of its ability to dig into a sandy bottom and hold position. This action will allow for better
stability while the buoy is moored. The anchor also incorporates a very strong anti-
fouling casing to prevent corrosion.
The deck and hull of AMB were specifically designed for the type of anchor
system chosen. An anchor well was cut out of the hull to allow the anchor to be raised
above the water level and into the anchor well in order for the anchor to not interfere
with the water flow. The well was installed 18 inches aft of the bow and the top of the
well is 4 inches below the deck. There is a through hull fitting for the anchor line to pass
from the deck to the well. The winch was disassembled and placed in a custom built
housing on the deck in order to separate the electronics, which are safely inside the hull,
and the motor and anchor line.

40
2.8.1 Electric Current Draw Estimates
The winch and anchor system were tested in a similar manner as the motors to
determine the amount of current drawn during the release and retrieval of the anchor.
Therefore, the winch motor was attached to a power supply and the anchor was released
and retrieved to establish the current draw. The results of this experiment are shown in
Table 7.
Table 7 Winch current demand
Position Amps
Down (release) 8
Up (retrieval) 22
From this information the total amount of current drawn by the winch per day
can be calculated based on the rough sea conditions of two foot seas with a four foot
wavelength. Assuming that the buoy is already moored and the winch can retrieve the
anchor in one minute, it will draw 22 amps for one minute. The buoy will complete it’s
transect and the winch will release the anchor for one minute drawing another 8 amps.
Thus, the winch uses a total of 30 amps for two minutes. Therefore, the winch uses 0.5
amp-hours of a battery. This is important when selecting a battery and charging system
as will be discussed in Section 2.11 Charge System.
2.8.2 Operation
The winch is operated by the same HiTec Laser 4 remote control that operates
the motors. The ratio of depth to mooring line used for AMB is three to one, so the
maximum mooring depth is 33 feet, which exceeds the depth in the majority of the near
shore operating region. The Deckhand 40 is designed with an auto-drift feature that
automatically stops the release of the anchor when it hits the bottom. This allows for
very easy installation and control when lowering the anchor. The operator can hold the
release switch down all the time but the motor will stop releasing line as soon as the

41
anchor has reached its location. However, in order for the winch to be remote
controlled, the switches were rewired into a breadboard with three relay switches in
order to override the pre-installed electronics. Therefore, the operator has control of
releasing, retrieving, and auto-drift with one joystick on the remote control.
2.9 RC System
The HITec Laser 4 RC system controls seven separate functions (Figure 23).
Figure 23 Control diagram
The right joystick is used to control the motors and the left joystick controls the
winch. The motors are designed to operate on two channels for ease of steering. Since
the speed controllers allow for continuous acceleration rather than stepping through
each speed setting like the typical trolling motor controls, the joystick can be used in four
directions at various positions in order to navigate. The vertical movements control the
starboard motor and the horizontal movements control the port motor. Therefore, if the
joystick is pushed at an angle of 45° between forward and right, the motors will work
together to move the buoy forward at full speed. If the joystick is in the 45° angle
between left and back, the buoy will move in full reverse. The other two corners operate
one motor in reverse and one motor in forward in order to make a sharp turn. Each of

42
these actions can be performed at varying velocities according to how much the joystick
is moved from center.
The left joystick controls the winch. The winch retrieves the line when the
joystick is moved forward, auto-drifts the line when it’s moved down, and continuously
releases line when it is moved left. The circuit designed by Larry Buist, Electronics
Technician Florida Institute of Technology, (Figure 24) made this control system possible.
Figure 24 Winch controls circuit Photo courtesy of Zak Pfeiffer, Florida Institute of Technology
2.10 GPS System
The Global Positioning System is a vital piece of instrumentation for this project
because the vessel is not capable of self navigation without the knowledge of its location.
The MR-350 GPS unit (Figure 25) was purchased from USGlobalSat Incorporated in City
of Industry, California. The first tests reveal an accuracy of approximately three meters.
With the buoy in remote control mode, the GPS unit is not as critical because the buoy is
always in the operator’s line of sight. However, upon completion of the autonomous
overhaul, GPS will be used for navigation and location in case of emergency.

43
Figure 25 MR-350 GPS unit mounted on deck
The MR-350 GPS unit is fully functional right out of the box. Two additional cable
sets, RS-232 and USB, were purchased in order to perform the necessary testing for
accuracy. The MR-350 is completely weatherproof and comes equipped with a 15 foot
PS/2 connector in order to interface with the cable kits. However, the original connector
was removed and replaced with a direct connection to 5V and RS-232 to simplify the
connection process for final testing. The specifications of the MR-350 GPS are listed in
Appendix G – MR-350 GPS Specifications.
GPS Unit

44
2.11 Charge System
The batteries on board the AMB will be charged by two separate solar panels.
The three 12 volt deep cycle/gel batteries will be capable of powering the buoy one at a
time. Therefore, at least two batteries will be charging while one battery is in use.
2.11.1 Batteries
The batteries chosen for this project are three 12 volt deep cycle/gel marine
batteries (Figure 26).
Figure 26 12 volt deep cycle marine battery The batteries are rated at 50 Amp-hours each and each is capable of running the buoy by
itself for at least one day on a full charge. As calculated in sections 2.6, 2.7, and 2.8, the
total amount of current drawn by the motors and winch is 28.64 and 30 amps
respectively. Considering the amount of time to complete one transect is 44 minutes
and the anchor will be retrieved before each transect for one minute and released after
each transect for one minute, the total amp-hours to run the buoy for one transect can
be estimated. The motors draw approximately 30 amps for 44 minutes, the winch draws

45
22 amps for one minute and 8 amps for one minute, and the instrumentation is always
on and is estimated to draw 2 amps at all times. Therefore, the following calculation can
be completed for the entire 46 minute transect:
(30A)*(44/60) + (22A)*(1/60) + (8A)*(1/60) + (2A)*(46/60) ≈ 24 amp-hours.
The three 50 Amp-hour batteries will have an approximate reserve of 125 Amp-hours for
longer transects, additional instrumentation, and dynamic positioning in deeper water.
These batteries will be charged using two 30 watt solar panels, recharging the batteries
on average of 3.6 amps per hour each.
2.11.2 Solar Panels
Two solar panels (Figure 27) are mounted on the deck of the buoy with each
housed in a plexi-glass box to prevent splashing onto the crystal charging cells. One
panel is above the anchor winch box and one is on five support stands near the stern of
the buoy. Each panel is in full view of the sky in order to get direct sunlight for the most
efficient charging. Solar panels on board AMB will keep all of the systems working
without a complete system shutdown ever required. Therefore, the buoy will be capable
of collecting data for an unlimited amount of time.
Figure 27 Solar panel mounted on deck at stern of buoy

46
The solar panels charge the batteries with the least amount of charge available
and the instruments on board draw from the battery with the most amount of charge.
Therefore, the solar panels charge while the buoy is underway and moored.
The batteries will be charging approximately 3.6 amps per hour when receiving a
charge. The average amount of charging time available during a 24-hour span is eight
hours. Therefore, a little more than 57.6 amps will be replaced in the batteries every
day, which is more than enough to keep the buoy running full time. See Appendix H –
Energy Budget for a complete table of the energy used by the systems on board the
buoy and replaced by the solar panels. To prevent overcharging and backflow of charge
through the batteries, the front panel is connected to the batteries through a charge
regulator and the back panel is connected to the batteries through a diode. The buoy is
capable of completing one two-mile transect per day assuming perfect weather (no
overcast skies or rain).
2.12 Weather Station
The weather station is a Davis Weather Monitor II (Figure 28) donated by Dr.
Craig Tepley of Arecibo Observatory in Puerto Rico, with affiliation to Cornell University.
Figure 28 All components of Davis Weather Monitor II [18]
The weather station is an important aspect of marine environment scientific data
collection due to variations the weather causes to other marine data such as: surface
temperature, salinity, visibility, and dissolved oxygen. This particular weather station is

47
equipped with an anemometer, two temperature sensors, two humidity sensors, a
barometer, and a rain gauge. Each component supplies important information for AMB
except the rain gauge. The rain gauge is not necessary because the data from the
barometer can be graphed and precipitation events can be determined from the
pressure fluctuations.
2.12.1 Weather Station Display and Software
The Davis Weather Monitor II is a complete system out of the box. All of the
necessary components for immediate data collection are included and are discussed in
the following section. The system comes equipped with a display module (Figure 29) and
computer software.
Figure 29 Weather station display monitor
The display module can provide a visual of the wind speed and direction, time, inside
temperature, outside temperature, wind chill, total amount of rainfall, barometric
pressure, inside humidity, outside humidity, and dew point. The display module can also

48
be used to change the units of each measurement and it can be used to set the
automatic download time for the on board data logger.
The Weatherlink data logger (Figure 30) can store information every minute, 5
minutes, 10 minutes, 15 minutes, 30 minutes, one hour, or two hours.
Figure 30 Weatherlink data logger [18] With the Weatherlink set to store data every 30 minutes, the data can be saved for 30
days. If the Weatherlink is set to store every 2 hours, the data can be saved for 120 days.
However, the 30 minute setting is desirable for the AMB because the buoy does not
need to stay more than a month without a check-up. Therefore, the collected data can
be downloaded to a computer every 30 days when the inspection is performed by
connecting the display monitor to a com port on the computer. The software package
that is available with the weather monitoring system is very user friendly. Testing the
software, Weatherlink 4.04, in the lab from May 24 – June 5, 2007 showed that it is
capable of producing a graphic of each measurement (Figure 31), graphing the data
(Figure 32), storing the data into a summary page (Figure 33), and saving the averages
from every time interval in a comma delimited field for ease of exporting into a program
such as Microsoft Excel for further studies (Appendix I – Exported Weatherlink Data).

49
Figure 31 Weatherlink 4.04 instruments graphic June 5, 2007
Figure 32 Weatherlink 4.04 graph of outside and inside temperature May 31, 2007
Figure 33 Weatherlink 4.04 NOAA weather summary May 24 – 31, 2007

50
2.12.2 Instruments
Each instrument packaged with the Weather Monitor II is connected through a
junction box via a RJ-12 or RJ-45 cable. The junction box (Figure 34) connects to the
display monitor in order to read all of the information.
Figure 34 Junction box for Weather Monitor II
There are two temperature sensors and two humidity sensors available with this system.
The inside temperature and humidity sensors are inside the display monitor which will be
inside the hull of the buoy. This information will be very helpful in determining how hot
and muggy the inside of the buoy becomes while underway and while moored. The
outside temperature and humidity sensors are housed inside of an external sensor
(Figure 35) that also measures pressure, wind chill, and dew point. This sensor will be
mounted on the outside of the hull without being in plain view of the sun.

51
Figure 35 External sensor housing barometer, temp sensor, and humidity sensor for Weather Monitor II
The anemometer (Figure 36) is attached to a pole that sits approximately six feet
above the deck and measures wind speed and direction. It is capable of withstanding
hurricane force winds but is sensitive enough to detect the slightest breezes. The
instruments on board will be continuously running, but the average data will be recorded
every 30 minutes.
Figure 36 Anemometer for Weather Monitor II

52
3. AMB Autonomous System
3.1 AMB Operation
The control system for the Autonomous Mobile Buoy is designed to let the user
have complete control of when and where the buoy moves. The buoy is driven away
from the launch point to a distance safely away from shallow water using the original
remote control system. When the buoy reaches the desired location the RC transmitter
is switched to the “Off” position and LabVIEW® assumes control of the buoy. Likewise,
when the RC transmitter is switched “ON” the user regains control of the motors.
The autonomous control system is a LabVIEW® Virtual Instrument (VI) (Appendix
J – LabVIEW® VI Control System) that is loaded onto a PC/104 computer. The LabVIEW®
user interface within the VI allows the user to input an array of desired Latitude and
Longitude coordinates to determine the desired heading of the buoy. The flowchart in
Figure 37 describes the main functions of the control system, but it does not describe the
order of operation, which is as follows: turn on the remote control, turn on the computer
and buoy, run the control VI.

53
Figure 37 Flowchart of autonomous control system

54
Without the remote control or LabVIEW®, the motors continually receive an
arbitrary digital signal from the driver board (see Chapter

55
3.2 Motor Control) that allows the motors to operate randomly. However, the PIC
controlling the motors automatically sets the motors to zero motion through the serial
port and the control VI sends a zero motion command to the motors as well. The control
VI sets the anchor up and down lines to off, sets the motors to zero motion, then reads
the GPS to determine the current heading. A desired location and heading are calculated
using the first set of Latitude and Longitude coordinates. Then the VI determines if the
buoy is at the desired location. If the buoy is at the desired location, the motors are shut
down, the navigation lights are turned off, the anchor lights are turned on, the anchor is
lowered, and the buoy’s computer waits for the response signal that the anchor is on the
bottom. Once the anchor is set, scientific measurements are taken for a specified
amount of time. Upon completion of the scientific data acquisition a signal is sent to set
the “anchor down” line to off, the anchor is raised, and a signal is sent from the winch
circuit to ensure the anchor is inside the anchor well. After the anchor is completely
inside the anchor well an off signal is sent to the “anchor up” line. The vehicle waits one
second before the computer calculates the next desired location and heading. If the
buoy is not at the desired location then the desired heading is calculated and compared
to the current heading. If the buoy is pointed in the desired direction, both motors
thrust the buoy forward and the system continuously checks for location and heading. If
the buoy is not facing the desired direction, the buoy turns left or right depending upon
the amount of distance the buoy needs to turn. When the buoy reaches the desired
heading, both motors are turned on for forward thrust. This continues until the last set
of desired coordinates is reached and then the buoy waits to be collected.

56
3.2 Motor Control
The motors and lights are controlled by a board of drivers (Figure 38) that send
signals through the serial ports on the PC/104 to a PIC and voltages to the motor
controllers and lights on the buoy. The motors are turned on and off depending upon
the desired location and heading of the buoy. A PIC programmed with code to control
the motors (Appendix K – Motor Control PIC Code) receives a string of ASCII characters
from LabVIEW® that sets the desired speed of the motors. The string of characters is
converted to two digital decimal values that are sent to a digital-to-analog converter
(DAC) and the corresponding analog voltage is sent to the motor controllers. The DAC
has two conversion options that are chosen based on the signal received from the PIC.
The DAC select pin is switched between DAC-A and DAC-B by changing the output of the
PIC from 0 (A) to 1 (B). The DAC then changes the digital input to an analog output which
is sent to the motor controllers to set the speed and direction of each motor.
The speed values are determined by calculating the number of volts each digital
decimal number represents. The motor controllers are sent a signal between 0 – 5 volts
and the range of signal values is 0 – 255 (Table 8).
Table 8 Voltage and signal range comparison
Voltage Range Signal Range
0 – 5 V (full range) 0 – 255
1 – 4 V (useable range) 51 – 204
Therefore, to determine the decimal value that corresponds to the voltage to produce
the correct speed in forward or reverse. However, the motors do not change speed
between 0 and 1 volt or between 4 and 5 volts. Therefore, the voltage range is 1 – 4
volts (51 – 204) for the entire range of speed of the motors with 2.7 volts (137)
representing zero motion. Anything less than 2.7 is reverse and anything greater than
2.7 is forward. Each signal value represents approximately 19.6 mV which is determined
by dividing the largest voltage value (5V) by the largest signal value (255).

57
20pf
PIC
16F
876
U1
4.00MHZ
MC
LR
/VP
P/T
HV
1
RA
0/A
N0
2
RA
1/A
N1
3
RA
2/A
N2
/VR
EF
-4
RA
3/A
N3
/VR
EF
+5
RA
4/T
0C
KI
6
RA
5/A
N4
/SS
7
OS
C1
/CL
KIN
9
OS
C2
/CL
KO
UT
10
RC
0/T
1O
SO
/T1
CK
I11
RC
1/T
1O
SI/
CC
P2
12
RC
2/C
CP
113
RC
3/S
CK
/SC
L14
RC
4/S
DI/
SD
A15
RC
5/S
DO
16
RC
6/T
X/C
K17
RC
7/R
X/D
T18
VDD20
RB
0/I
NT
21
RB
122
RB
223
RB
3/P
GM
24
RB
425
RB
526
RB
6/P
GC
27
RB
7/P
GD
28
19
8
GRD
.1
15
MA
X23
2A
16
.1
.1
.1
.1
.1
C1
+1
C1
-3
C2
+4
C2
-5
V+
2
V-
6
R1
OU
T12
R2
OU
T9
T1
IN11
T2
IN10
R1
IN13
R2
IN8
T1
OU
T14
T2
OU
T7
TTL
232
Vcc
Grd
Serial Communications
Activity
Indicators
RED
Green
.1
"A"
"B"
"A"
"A"
"B"
"B"
Copywrite Larry Buist for UTL
AMB Driver Board
Serial 1
Serial 1
Serial 2
Serial 2
10K
10K
10K
RF On/Off
Servo controller
Motor controller
PWM
OU
T3
RST4
VCC8
GN
D1
CV
5
TR
G2
TH
R6
DS
CH
G7
U1
0L
M5
55
1uf
1uf
620
.1
1K
.1
.1
.1
.1
.01
D
2N4402
G
Oscillator - 20ms period
Ramp generator - 2ms max
Input 1 (0-5v)
1K
S
Input 2 (0-5v)
.1
1K
2K
12v
1K
20k
Grd
5.6V
+5v
7 61
3 12
-+ U5
3A
LM
33
9
51
7
14
14
722K
47uf
4 56
U5
4B
7400
9
10
8U
54
C
7400
Grd
+5v
12
13
11
U5
4D
7400
47uf
GRD
47uf
+
+ -
-
OU
TA
2
OU
TB
20
DB
014
DB
113
DB
212
DB
311
DB
410
DB
59
DB
68
DB
77
VDD17
RE
FA
4
RE
FB
18
DA
CA
/DA
CB
6
WR
16
CS
15
RF
BA
3
RF
BB
19
U1
1T
LC
75
28
5 42
-+ U5
5B
LM
33
9
4 pin Molex (Digi-Key WM4202)
DTR
RTS
RTS
DTR
9 814
-+ U5
5C
LM
33
9
4 56
U5
6B
7400
9
10
8U
56
C
7400
12
13
11
U5
6D
7400
SS SSDDD
G
D
GG
2N3904
2N3904
G
2N3904
2N3904
1K
1K
1K
10K
10K
1K
10K
10K
IRF9141
4 pin Molex (Digi-Key WM4622)
5.1K
12
13
11
U5
7D
7400
VIN
VO
UT
11
10
13
-+ U5
8D
LM
33
9
IRF9141
12
13
11
U5
9D
7400
IRF9141
-+
(middle pin)
(middle pin)
2 Pin Molex (DIgi-Key WM4620
SPARES
(middle pin)
Spare
Out 1
Anchor
Lights
NAV
Lights
Spare
Out 2
3 each 3 pin Molex
(Digi-Key WM4201)
IRF9141
Set Pulse
Set Freq.
width
VN0300L
ch 6
ch 5
LM7805
ch 7
110mv
White
Gray
Figure 38 Driver board schematic (Courtesy of Larry Buist, Florida Institute of Technology)

58
The signal values written to the motor drivers for forward motion, right turn, left
turn, reverse motion, and no motion are shown in Table 9. For the buoy to move
forward a value between 2.7 and 4 is used to ensure better control of stopping at the
desired location. The value chosen is 170 which is the value in the middle of 2.7 and 4
volts. This value is given to both motors for forward movement. The value given to both
motors for no movement is 137, which corresponds to 2.7 volts. For a right turn the left
motor moves forward and the right motor moves in reverse. Therefore, a right turn
constitutes the left motor receiving a 170 and the right motor receiving a 94 which
corresponds to the middle of 1 and 2.7 volts. This is reversed for a left turn, so the right
motor moves forward at 137 and the left motor moves in reverse at 94. These values
can be converted to control variables in LabVIEW® to enable the user to set them at any
time. However, at this time each value is a constant and will not be changed unless it is
determined that a value is incorrect.
Table 9 Motor driver signals
Buoy Movement Voltage Signal Left Motor Signal Right Motor
No Motion 2.7 V 137 137
Forward Motion 3.35 V 170 170
Reverse Motion 1.85 V 94 94
Right Turn 3.35 V, 1.85 V 170 94
Left Turn 1.85 V, 3.35 V 94 170

59
3.3 Location and Heading
The buoy is equipped with a USGlobalSat MR-350 GPS unit and the EZ-Compass 3 digital
compass (Figure 39) in order to perform the navigation calculations necessary to
maneuver in the Indian River Lagoon. The GPS unit is the single most important piece of
the system because it provides the current location and the desired heading from the
coordinates it outputs to LabVIEW®. Without the current coordinates, the VI could not
proceed past the first step.
Figure 39 EZ-Compass 3 digital compass Photo courtesy of Dr. Stephen Wood, Florida Institute of Technology

60
3.3.1 GPS
The GPS unit determines the current location and compares the Latitude and
Longitude to the desired values of Latitude and Longitude. The antenna outputs four
lines of GPS data: GSA (GPS DOP and Active Satellites), GGA (Global Positioning System
Fix Data), GSV (GPS Satellites in View), and RMC (Recommended Minimum Specific
GPS/Transit Data) as can be seen in the raw data taken in front of Frueauff Building on
August 16, 2007 (Appendix L – GPS Raw Data). A LabVIEW® SubVI (Appendix J –
LabVIEW® VI Control System) is used to pick out the RMC line from the free flowing data
and a “Match” command is used to parse out the Latitude and Longitude values and
directions (N, S, E, W). The values are then converted from string format to numerical
and subtracted from the desired Latitude and Longitude values. This data is fed into the
control system VI (Appendix J – LabVIEW® VI Control System) where a “for” loop is used
to control when the array releases the new set of desired values. When the current
location is subtracted from the desired location, an error is determined and compared to
an allowable range. Based upon the error a decision is made to calculate the desired
heading or to drop the anchor. If the error is within the allowable range, the anchor
system begins. However, if the error is not within the allowable range, there are eight
different conditions that could be met in order to determine the desired heading.
The eight conditions are determined by the difference between the desired and
actual coordinates. Four of the conditions are special cases and are treated differently
than the four generic options. The four special conditions are 0° (N), 90° (E), 180° (S),
and 270° (W). These four headings are used when either the actual
Latitude or Longitude value, but not both, is already within the error range
when subtracted from the desired Latitude and Longitude. The other four
conditions are met when neither error value is within the range.

61
Table 10 shows the desired heading conditions determined by calculated
error compared to the allowable range.

62
Table 10 Desired heading conditions
Latitude Error Longitude Error Desired Heading Equation
> range > range 360 – ArcTan(Long/Lat)
< range > range ArcTan(Long/Lat) + 270
> range < range Abs(ArcTan(Long/Lat))
< range < range ArcTan(Long/Lat) + 90
The different equations for the desired heading are determined using a modified
Cartesian coordinate plot. The Latitude values work the same as the normal Cartesian
plot, but the Longitude values are slightly different. Since, the Longitude values increase
from East to West across the map the “X-axis” is the reverse of the typical quadrant plot.
Therefore, certain adjustments were needed in order to ensure the system would
determine the proper desired heading and not 180° in the opposite direction.
3.3.2 Compass Heading
A LabVIEW® SubVI (Appendix J – LabVIEW® VI Control System) reads the EZ-
Compass 3 (Appendix M – EZ-Compass 3 Specifications) and outputs roll, pitch,
temperature, and heading to the control system VI. The heading is pulled out of the
output array and used to calculate an error between the actual heading and the desired
heading. Once the desired heading is determined from the GPS coordinates, the actual
heading is subtracted from that value. The heading error is then used to determine if the
buoy should move forward, turn right, or turn left. If the error is within the allowable
range, then the system turns both motors on for forward thrust and continues to
monitor the location and heading to ensure the correct path is maintained. However, if
the heading error is not within the allowable range then there are two options: turn left
or turn right. If the error is greater than 180°, then the error is subtracted from
360° and the buoy turns left by providing forward thrust with the right motor
and reverse thrust with the left motor. If the heading error is less than or
equal to 180°, the buoy turns right by providing forward thrust with the left
motor and reverse thrust with the right motor. These adjustments prevent

63
the buoy from ever turning more than 180° which shortens the amount of
time it takes the buoy to find the desired heading.
3.4 Mooring System
The mooring system circuit (Figure 40) is programmed with a PIC to lower an
anchor upon receiving a signal from the LabVIEW® control system VI (Appendix J –
LabVIEW® VI Control System) that the buoy is at the desired location, send a signal to
the control VI informing LabVIEW® that the anchor is on the bottom, and wait for a signal
to raise the anchor. While the anchor is being lowered a Hall Effect sensor counts the
number of turns the winch made to lower the anchor to the bottom. This value is stored
and compared to the count on the way up to ensure that the anchor is completely back
in the anchor well.

64
4.3K
4.3K
68K
68K
DTR/RTS signals
can swing + and - 12v
NOTE
RC7= Serial out to PC
32
14
+5v
LM78L05
Grd
(Option)
Serial Out to PC
Anchor MicroSW
Red
12 Volt Battery
LM393
Org
Grn
22K
10K
-+
RB5= Hall effect pulse In
RB6= Anchor Up
RB7= anchor down
RC2= Bypass
RC5= Out to PC104 - DTR
RB4= Anchor dropped In
RC0= Anchor Up Control
RC1= Anchor down control
12
Digital Inputs
Digital Outputs
20pf
PIC
16F
876
U1
4.00MHZ
MC
LR
/VP
P/T
HV
1
RA
0/A
N0
2
RA
1/A
N1
3
RA
2/A
N2/V
RE
F-
4
RA
3/A
N3/V
RE
F+
5
RA
4/T
0C
KI
6
RA
5/A
N4/S
S7
OS
C1/C
LK
IN9
OS
C2/C
LK
OU
T10
RC
0/T
1O
SO
/T1C
KI
11
RC
1/T
1O
SI/
CC
P2
12
RC
2/C
CP
113
RC
3/S
CK
/SC
L14
RC
4/S
DI/
SD
A15
RC
5/S
DO
16
RC
6/T
X/C
K17
RC
7/R
X/D
T18
VDD20
RB
0/I
NT
21
RB
122
RB
223
RB
3/P
GM
24
RB
425
RB
526
RB
6/P
GC
27
RB
7/P
GD
28
19
8
GRD
PIC ASSIGNMENTS:
Blocks Negative
1N4148
Grd
+5v
Archor Dropped
Grd
3 21
8 4
-+
Motor
Adjust for
appro 1 V
Up Anchor
Down Anchor
VIN
VO
UT
+5v
1
Honeywell
SS495A
J6
DTR
J1
RTS
DTR
J3
Serial Port
J7
Up
Down
J2
J5
Serial Out
To PC104
Hall Effect In
J4
+5v
K1
K3
K2
234
.1
6.8uf
Copywrite Larry Buist for UTL
AMB Anchor Control
1N4148
Figure 40 Anchor board schematic (Courtesy of Larry Buist, Florida Institute of Technology)

65
The PIC code (Appendix N – Original Anchor Control PIC Code) for the anchor
control board immediately disengages all of the actions available for the winch.
Therefore, the winch will not try to release or retrieve the anchor as this could burn out
the motor if the anchor is already all the way inside the anchor well. Next, the PIC sits in
a loop and waits for a signal from LabVIEW® to send the anchor down or pull the anchor
up. The signal comes from a serial port initialized in the control system VI. If the winch is
told to drop the anchor, the PIC initializes a “down” loop and sends a signal to a
transistor which supplies the correct voltage (+12 volts) to the winch motor to lower the
anchor. The code immediately checks for a signal from the Hall Effect sensor to
determine how much line is released. That value is stored for comparison when raising
the anchor. When the anchor reaches the bottom, the winch automatically stops and
the counter for the Hall Effect sensor concludes. The program then returns to the initial
loop to wait for a signal to retrieve the anchor. Upon receiving that signal, the code
jumps to an “up” loop and sends a different transistor a signal that sends -12 volts to the
motor to raise the anchor. The count from the Hall Effect signal is used to determine
how many turns to make to ensure the anchor is completely back in the anchor well and
not dragging in the water. After the anchor is completely up, the code again returns to
the initial loop to wait for a signal from LabVIEW®.
Two magnets are attached to the spool of line on the winch and a Hall Effect
sensor is attached to the outer stationary part of the winch (Figure 41). The Hall Effect
sensor is used to count the number of times a magnet passes by in order to determine
how many times the magnets need to pass on the way up.

66
Figure 41 Winch with Hall Effect sensor and magnets
When the signal to drop the anchor is received, the thrust motors are turned off,
the navigation lights are turned off, the anchor lights are turned on, and then the anchor
is lowered. The anchor winch is designed to stop releasing when the tension in the line
no longer exists. Therefore, when the anchor hits the bottom, the winch will stop
releasing line. When the anchor reaches the bottom, the system then waits a
predetermined amount of time before the winch is told to retrieve the anchor. This
waiting period is used to collect scientific data and can be changed depending on how
long the data collection will take. Just before the anchor is to be raised, the “down” line
receives an off signal to ensure the anchor will not release any more line. When the
Hall Effect Sensor
Magnets
Hall Effect Sensor
Magnets

67
winch receives the signal to retrieve the anchor, the Hall Effect sensor counts the
number of times the magnets pass and tells the winch when to stop retrieving line. As
long as the sensor reads the same amount of “clicks” on the way up as it does on the way
down, the anchor will be safely in the anchor well and not dragging in the water. As soon
as the LabVIEW® control system receives a signal that the anchor is all the way up, the
anchor light is turned off and another waiting period of one second begins before the
while loop starts from the beginning with a new set of coordinates.
3.5 Lighting System
The lighting system is designed to operate in conjunction with the navigation motors and
the anchor motor. The navigation lights are always on when the buoy is moving to a new
location and draws approximately 0.5 amps. The anchor light (Figure 42) is only on when
the anchor is down and it is dark and only draws 0.110 amps while using the standard
bulb that is visible from two nautical miles [19]. An additional bulb is supplied that is
twice as bright and draws 0.320 amps [19]. The lights are driven by the same board that
drives the motors. The lights are turned on and off using the DTR (navigation) and RTS
(anchor) lines of the serial port and are tied directly between LabVIEW® and the driver
board. The lights do not need a PIC to operate, but the control of the lights could be
added to PIC in future editions of the project. The navigation lights (Figure 43) are
always sent an off signal and the anchor light is always sent an on signal before the
anchor is dropped and the anchor light is always sent an off signal after the anchor is up.

68
Figure 42 Davis Mega Light
Figure 43 Navigation light with mount

69
3.6 Autonomous Test Results
Initial testing of the AMB control system was performed in the lab. However,
during the initial testing the PIC on the anchor board was continuously overheating.
Testing proved that anytime a programmed PIC was in the socket, the +5 V regulator
would not operate properly and if a non-programmed PIC was in the socket, all of the
voltages were correct. It was initially determined that the program on the PIC was
causing the problem. However, upon further testing, the serial input to the PIC was
causing a voltage overload. The default voltage range of the Data Terminal Ready (DTR)
and Ready to Send (RTS) lines of the serial port is -12 to +12 V. The PIC can only accept
positive voltage less than or equal to 5 V. Therefore, a diode was placed on the incoming
signal to allow only positive voltages on the input pin and transistors were used in order
to send a +5 V signal instead of a +12 V signal to the PIC. After solving the problem, the
PIC operated properly and further testing of the system began.
Using TightVNC, the computer on board the AMB is remotely accessed to control
the LabVIEW® VI that controls the buoy. The setup for TightVNC initializes a server to
automatically run on the PC/104 stack. The stack sends out a wireless network enabling
any wireless computer to connect. Therefore, TightVNC is also running on the “home
computer” in order to view the desktop of the PC/104 stack. After connecting to the
wireless network, “TUVAAQ”, broadcasting from the vehicle’s computer the VNC
connection is made by typing in the IP address of the PC/104. The IP address for wireless
networks changes each time the system is restarted; therefore, a static IP address
(169.254.1.1) was given to the vehicle’s network in order to always enable a connection
through VNC. With the PC/104 operating as a server, the “home computer” can listen
for a signal and send a reverse connection request to the PC/104. This allows the “home
computer” to connect to the server running on the PC/104, which allows the operator to
remotely control any programs installed on the PC/104 from the “home computer.” This
method of virtual networking was used to perform testing of the control system.
The AMB was tested inside the lab to control the testing procedure. Upon
testing each individual system it was determined that the lights and motors respond

70
exactly as expected to the LabVIEW® commands. However, the winch motor did not
operate at full speed. Changes to the original PIC code (Appendix O – Updated Anchor
Control PIC Code) for the winch were made in order to discard any lines of code that
controlled the Hall Effect sensor and only send a message to the anchor to raise and
lower. The PIC and LabVIEW® work as they should without a load applied where the
winch motor should be connected. However, upon attaching the motor, the relays
cannot send a strong enough signal to continuously turn the motor. The motor attempts
to raise the anchor and does so very slowly and it also tries to lower the anchor, also very
slowly. However, the winch does not operate at full speed even though the system is
attempting to work properly.
In order to fully test the control VI, new relay switches would need to be placed
into the circuit that are capable of operating the winch motor at full speed. However,
the full system was tested in the lab to ensure that lights, motors, and anchor operated
at the correct time. This test proved the overall system is working properly from the
computer to the buoy. The only errors occurred with electronic parts that need to be
replaced.
The GPS and compass were tested outside before being mounted on the buoy
and each system worked as expected. The GPS read the data and compared the current
location to the desired location and calculated the correct desired heading. The desired
heading was compared to the current heading recorded by the compass and the proper
motor response occurred.

71
4. Conclusions
This paper has presented the complete design, construction, computerization,
and testing of an autonomous mobile buoy. The uses of the buoy can be expanded by
further research to increase the scientific capabilities, improve the efficiency of the
control system, and improve the operation of the mooring system. However, the current
system is capable of providing reliable meteorological data and navigation in the Indian
River Lagoon and other shallow water estuaries. Throughout the research, design, and
construction of the AMB, much has been accomplished. These results are listed below:
1. Designed the first shallow water fully mobile, self mooring autonomous
research buoy.
2. Built small prototype of the AMB.
3. Implemented the design to a full scale aluminum hull.
4. Designed a remote control system for initial trials.
5. Designed a fully functional autonomous control system.
6. Successfully tested the first version of the control system.
In conclusion, the objectives of the project set forth during the spring 2006
semester have been fulfilled. However, a new set of objectives for the continuation of
the research for the AMB should be developed for future endeavors. The continuation of
the AMB will provide future students the opportunity to repair the circuits for the
mooring system, update the control system by using LabVIEW® or by using
microcontrollers with various programming languages, determine the accuracy of the
system based on the accuracy of the compass and the GPS units, and determine the
amount of time one loop of the LabVIEW® VI takes to fully run and compare that value to
the time required for the buoy to turn. Also, the AMB is in need of hardware and
electrical component updates. The anchor line needs a roller to guide the line into the
winch and the control system for the anchor needs to be updated to include a method to

72
release the anchor to the bottom and then release three times the amount of line
already out in order to meet the requirements of mooring a vessel at a 3 to 1 ratio
compared to the depth. Water proof connectors are needed to connect cables into the
box, into the computer stack, and through the deck. Finally, the electronics can be
minimized by using a PIC to control many more systems than the current layout. The PIC
could be used to control the anchor, the motors, the lights, and any other systems placed
on the buoy. Currently, Larry Buist is in the process of designing the new electronic
layout for the next development of the AMB. The new design consists of more outputs
from the PIC, more drivers for extra motors and lights, and plug-and-play type
connectors on board. The new system will only need one serial port to send and receive
data between the PIC and LabVIEW®. These updates will create a truly state-of-the-art
system that could be transferred between vehicles in the Underwater Technology
Laboratory at the Florida Institute of Technology. This will provide future students with
access to a fully functional testing platform for autonomous vehicles.

73
5. Recommendations for Future Research
5.1 Control Systems Updates
The control system is under development and can be updated to a more efficient
system. In order to truly operate as an autonomous vehicle, updates need to be
completed to determine the desired error range for the heading and the location of the
buoy. The GPS unit is accurate to approximately 3 meters (10 feet) and the control
system needs to be capable of stopping the buoy within a determined range of the
desired location. Also, when the error range is calculated for the location, consideration
must be given to the mooring system. The winch drops the anchor directly to the
bottom in a straight line and will not actually dig into the bottom when dropped in this
fashion. However, when the anchor reaches the bottom, the winch can release three
times the amount of line it needed to reach the bottom and then the buoy will drift off
location and the anchor will dig in and hold to the bottom. This method will provide the
3 to 1 ratio of line to depth needed to secure the mooring.
Also, the error in the compass needs to be determined and calibrated in order to
program the control system to react within an allowable error range. Therefore, the
buoy will not constantly look for the exact value of the desired heading while rotating to
the correct position. A range of allowable error in the heading would increase the
allowable error range in the location. Therefore, the error range for finding the location
will grow as tests are completed, or the motors will continuously turn the buoy in circles
trying to maneuver into the allowable error range.
Another update to the control system would include calculating the amount of
time needed to complete one full loop in the LabVIEW® VI. If the loop runs slower than
the rotation of the buoy when trying to reach the desired heading, the buoy will spin in
circles indefinitely. Therefore, if the loop runs slower than the motors, a timer needs to

74
be added so the buoy rotates a short amount of time and waits for the next command to
rotate or move forward.
5.2 Cameras
Cameras are targeted to be added to the vehicle at a later date. The addition of
a deck mounted surface camera will allow for vessel and stationary object collision
control, security from vandals, and real-time viewing on the surface for meteorological
observations. Additionally, a subsurface camera will allow for underwater obstacle
collision control, scientific seagrass surveys, marine life tracking, HAB detection, and
plankton density measurements.
5.2.1 Surface Camera
The forward facing camera should be capable providing real-time footage of any
activity off the bow of the buoy. This activity could include vandalism, approaching
obstacles, imminent weather developments, and many other events that could occur at
sea. With real-time feeds, the camera can add two methods of collision control. The
primary method is an on board system to recognize an approaching obstacle and steer
clear of the object. The secondary method is a live feed to a land based computer that
could be used to override the system and manually steer the buoy away from danger.
The live feed method could also be used to inform the user to manually steer the buoy
away from weather danger, vandals, and other scenarios as they arise. The deck
mounted camera would be an integral addition for the safety of the buoy and its
surroundings.
5.2.2 Subsurface Camera
The addition of a subsurface camera to be used for seagrass (Figure 44) surveys
would be very useful in the scientific study of seagrass in various areas in the Indian River
Lagoon (IRL). An on board system should be capable of processing the video for

75
subsurface collision control as well as saving the video as a backup in case of
communication failure. A real-time feed should also be established for studying seagrass
from a home computer via a live feed from the buoy. The study of seagrass over an
extended period of time would be much easier at a computer rather than snorkeling or
diving for hours. The subsurface camera would also reveal the activities of the diverse
marine life in the IRL.
Figure 44 Thalassia testudinum (Turtle Grass) in Biscayne Bay Photo courtesy of Dr. Elizabeth Irlandi, Florida Institute of Technology
5.2.3 Subsurface Video Cameras
Video cameras below the surface of the buoy are pertinent in developing an
early detection system of HABs (more commonly known as red tide) (Figure 45), which
cause various problems with food and air quality. Also, video cameras would provide
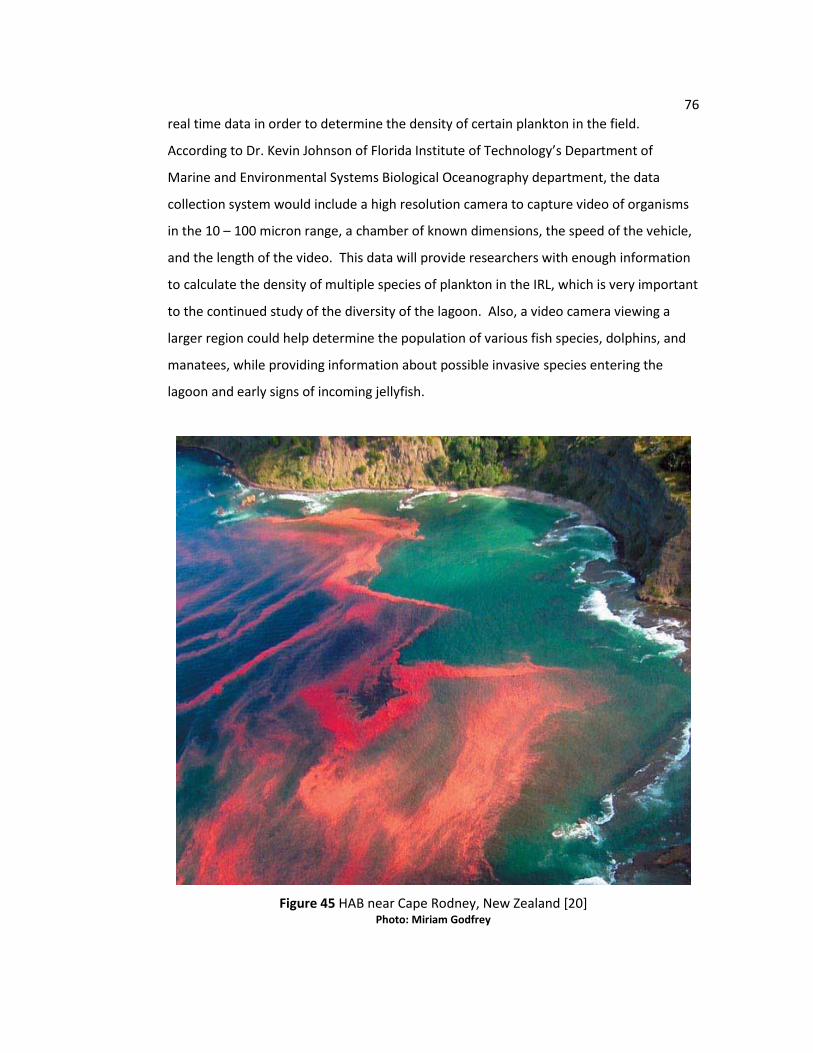
76
real time data in order to determine the density of certain plankton in the field.
According to Dr. Kevin Johnson of Florida Institute of Technology’s Department of
Marine and Environmental Systems Biological Oceanography department, the data
collection system would include a high resolution camera to capture video of organisms
in the 10 – 100 micron range, a chamber of known dimensions, the speed of the vehicle,
and the length of the video. This data will provide researchers with enough information
to calculate the density of multiple species of plankton in the IRL, which is very important
to the continued study of the diversity of the lagoon. Also, a video camera viewing a
larger region could help determine the population of various fish species, dolphins, and
manatees, while providing information about possible invasive species entering the
lagoon and early signs of incoming jellyfish.
Figure 45 HAB near Cape Rodney, New Zealand [20] Photo: Miriam Godfrey

77
5.3 SONAR
Currently, SONAR is absent on board the AMB. However, there should be at
least four SONAR systems included on board the buoy. The four systems should be able
to assist with the surface collision control, subsurface collision control, acoustic
hydrophones for identification of sounds such as fish, shrimp, dolphin, and man made
sounds, and most importantly, the water depth.
5.3.1 Surface Collision Control
The surface collision control SONAR system should be capable of warning the
computer systems on board and on the shore of any oncoming danger. The computer on
board should be able to respond immediately to any signal received from the surface
system. Therefore, the surface SONAR needs to work in conjunction with the surface
camera in order to provide another factor of safety in the collision control system. The
buoy should be able to interpret the signals from the surface SONAR and steer away
from danger in the case of immediate danger. Also, the surface SONAR should be
capable of sending a signal to the home computer to enable the user to override the
navigation and steer the buoy out of harms way manually. With the camera and the
SONAR system, the buoy should be able to keep itself out of the way of most dangerous
situations.
5.3.2 Subsurface Collision Control
The subsurface collision control SONAR system should be capable of sending
warnings to the computers on board and on shore to alert both systems of any incoming
objects that are higher than the seafloor (i.e. rock ledges, sand bars, sunken vessels,
etc.). This SONAR will be a forward facing system that can identify these shallow regions
before the buoy hits them. If the SONAR recognizes any discontinuity in the water
depth, the signal sent to the on board computer will alert the navigation system to stop
and a signal will be sent to the home computer for further inspection using the

78
subsurface camera. The user can then override the navigation system to steer away
from the impending danger. This collision control device can be used with the
subsurface camera to determine when the SONAR reads a large fish instead of an object
that could cause harm the buoy. Therefore, the buoy can continue its mission without
interference or delay.
5.3.3 Subsurface Acoustic Identification
A subsurface acoustic identification system will determine various sounds
“heard” in the river. This system requires the knowledge of in-depth neural networks in
order to train a program for the various sounds the SONAR could hear [21]. Therefore,
to simplify the system, it could be developed to only determine the difference between
boats and creatures. Then, when a boat is heard, the system can decide the location,
speed, and direction of the boat. The buoy would then know if there was any immediate
danger that can’t be seen by the surface collision control system. If a fish is heard, the
system could then identify the type of fish creating the noise (i.e. dolphin, snapper
shrimp, etc.) in order to better understand the vast number or marine life in the IRL.
5.3.4 Depth Sounder
The addition of a depth sounder is of utter importance because the AMB needs
to use the depth of the water as another safety factor when navigating the lagoon. The
control system must consider the depth of the water when navigating between way
points in order to steer away from shallow water. Also, the buoy cannot anchor in the
channel of the IRL because the mooring line is only long enough to be effective in 30 feet
of water. Therefore, if the desired location of the buoy is in water deeper than 30 feet,
the control system must move to the next location immediately. The depth sounder can
also be used in conjunction with the scientific data measurements. Knowing the depth
of the water will help with classifying wave types and verifying temperature, salinity, and
pressure.

79
5.4 Current Meter
The addition of an acoustic current meter is important to the scientific study of
the water column at each location the buoy is moored. The current meter should be
capable of determining the speed and direction of the current directly below the vessel.
It is necessary to know the speed and direction of the current for further studies of
sediment transport and tidal flow. The current meter should be able to record the speed
and direction of the current and store that data using the on board computer as well as
updating the home computer with real-time data.
5.5 Wave Measurement System
It is very important for the buoy to remain moored in waves larger than 2 – 4 ft.
A wave measurement system should be installed in order to measure and record the
wave direction (relative to the bow), height, wavelength, and period and determine if the
waves are too big for safe buoy operation. This system should be comprised of two
capacitance wave gauges (bow and port or starboard side) and a 3-axis accelerometer.
The gauges should be offset in the x and y planes in order to record wavelength. The
accelerometer would output the heave, surge, sway, pitch, roll, and yaw and can be used
to calculate the error caused by the wave gauges moving with the buoy. The double
integral of the heave (z-direction) results in a displacement that can be used to counter
the effect of the gauges moving in the vertical direction with the buoy. The double
integral of the surge (x-direction) provides an error function used to calculate the true
wavelength. The other parameters of the accelerometer are not necessary in a wave
measurement system, but are of importance for understanding the dynamics of the hull.
Also, the accelerometer and the gauges must be time stamped, which can be obtained
from the GPS, in order to provide accurate data.
If the wave measurement system calculates waves bigger than 4 ft while the
buoy is underway, the batteries will drain rapidly due to the wave action against the hull.
If the buoy is underway and waves are recorded larger than the recommended range,

80
the motors should stop and the anchor should be lowered to ensure the safety of the
vessel. The wave measurement system should be capable of storing the measured data
on board, processing the data, and sending real-time updates to the home computer.
5.6 Wireless Communication – Radio & Cell Phone Technology
Connectivity of the vehicle to a home base through wireless communication is
essential for 1) the safety of the vessel, 2) real-time access of on site data, 3) updating
mission targets or mission plan, and 4) controlling the vehicle remotely when necessary.
Without wireless communication, the buoy could become lost, stolen, wrecked,
overturned, or completely destroyed without the ability to notify anyone on shore.
Similar to all wave gauge and weather station buoys in use today, the AMB could show
live updates of all systems and measurements through a website. Therefore, the
community could also use the data that is being recorded by the buoy at each location.
It is also vital that the scientist be able to remotely change the mission underway to
another mission of higher importance. This may also require the vehicle to be controlled
remotely.
5.7 Scientific Research Platform and Winch
The addition of a scientific platform at the stern of the buoy would allow for
research equipment to be added and removed in order to vary the projects on specific
missions. Therefore, the buoy could be used by multiple researchers as long as the
equipment is designed to fit on the platform. The platform should include a robotic arm
to lower and raise various instruments included in the research packages. The design of
the platform should not compromise the buoyancy, center of gravity, and stability of the
vessel and should have a payload of at least 50 lbs.
An additional winch is required as well as the research platform in order to
manipulate heavier instrumentation. A winch similar to the mooring system winch
should be mounted on the deck. Care must be taken in mounting a new winch so that

81
the weight shift on the deck does not create an imbalance. Also, the two winches need
to be enough apart in order to keep the lines from tangling.
5.8 Scientific Instrumentation
The key to the success of the AMB is the scientific instrumentation on board.
Without data collection, the buoy does not have a purpose. There are two instruments
that will be permanently attached to the buoy: a “Smart CTD” and Hydrolab’s multiprobe
SCOUT®.
5.8.1 CTD
The “Smart CTD” (Figure 46) manufactured by Applied Microstystems, Ltd.
contains more individual sensors than the typical CTD. The “Smart CTD” includes: a
Conductivity sensor by Applied Microsystems, Ltd., a Chlorophyll – A LED Fluorometric
sensor by WetLabs, Inc., an Optical Backscatter Turbidity sensor by D&A Instruments, a
Combination Electrode pH sensor by Innovative Sensors, a Polarographic Dissolved
Oxygen sensor by YSI, Inc., a Pressure gauge by Keller, a Sound Velocity sensor by Applied
Microsystems, Ltd., and a thermistor style Temperature sensor by Applied Microsystems,
Ltd.
Figure 46 "Smart CTD"
Photo courtesy of Dr. Stephen Wood, Florida Institute of Technology
The “Smart CTD” will be mounted on the keel in order to supply readings at the sea
surface while the vessel is underway or moored. The water depth in the IRL does not

82
require measurements much below the surface. The “Smart CTD” can be used to gather
typical oceanographic data such as conductivity, dissolved oxygen, turbidity, pH,
temperature, and pressure. But, the addition of the fluorometric sensor allows for dye
tracing which can be used to determine the dispersion of particles in the water, such as
waste that is dumped from large vessels. The dye trace shows how waste dumping is
affecting local beaches by determining how fast and how much of the waste is moving
toward the shoreline.
5.8.2 SCOUT®
The Hydrolab SCOUT® (Figure 47) is a multiprobe device that measures
temperature, pH, dissolved oxygen, conductivity, and depth [22]. Since SCOUT® performs
many of the same measurements as the “Smart CTD” comparisons of the values can be
made to further validate the data. Alternatively, either SCOUT® or “Smart CTD” could be
attached to a mechanical system to record measurements in deeper water and compare
values at the surface to values through the water column.
Figure 47 SCOUT®
Photo courtesy of Dr. Stephen Wood, Florida Institute of Technology

83
5.9 Bilge Pumps
The AMB needs two bilge pumps installed before a full scale deployment is
feasible. The bilge pumps need to be located near the bow at the lowest point of the
vessel and near the stern to pump water away from the electronics box. These pumps
need to include float switches in order to power up only when enough water has entered
the hull. Also, the pumps should send the water out of the hull above the waterline at
the stern of the buoy. This will prevent water from coming back into the vessel.

84
References
[1] National Data Buoy Center. NOAA Marine Observation Backbone. (2005,
November). Retrieved July 8, 2007 from http://mob.ndbc.noaa.gov/cgi-bin/mob.cgi
[2] Randall, Robert E. Elements of Ocean Engineering, First Edition. New Jersey: The
Society of Naval Architects and Marine Engineers, 1997.
[3] Berteaux, H.O. Coastal and Oceanic Buoy Engineering. Woods Hole: Berteaux, 1991.
[4] Wood, Stephen, Michelle Rees, Zak Pfeiffer. An Autonomous Self-Mooring Vehicle
for Littoral & Coastal Observations. Florida Institute of Technology, Melbourne, FL
2007.
[5] The American Practical Navigator. Short Range Aids to Navigation. (2007). Retrieved
July 11, 2007 from http://www.answers.com/topic/the-american-practical-
navigator-chapter-5
[6] Axys Technologies Inc. NOMAD. Retrieved May 23, 2007, from
http://www.axystechnologies.com/pdf/Nomad_001.pdf
[7] Pfeiffer, Zak, Michelle Rees, Derek Tepley, and Safia Tappan. AMB Report. Sr. Design
Paper, Florida Institute of Technology, Melbourne, FL, 2007.
[8] Moored Buoy Program. (2006, August). Retrieved May 23, 2007, from
http://www.ndbc.noaa.gov/mooredbuoy.shtml
[9] Offshore Buoy Network. (2006, December). Retrieved May 23, 2007, from
http://www.atl.ec.gc.ca/msc/em/marine_buoys.html

85
[10] Yarosh, M., Vagoun, T., “CoastalObs Tests the Waters in The Chesapeake Bay,” Sea
Technology, pp. 27-29, September, 2006.
[11] Telesupervised Adaptive Ocean Sensor Fleet. Retrieved May 30, 2007, from
http://www.cs.cmu.edu/afs/cs/user/gwp/www/TAOSF/
[12] Robotic Marine Systems. Products. Retrieved August 15, 2007 from
http://www.maribotics.com/products.html
[13] Massachusetts Institute of Technology. Laboratory for Autonomous Marine Sensing
Systems. (2007) Retrieved August 15, 2007 from
http://acoustics.mit.edu/faculty/henrik/LAMSS/laboratory_for_autonomous_marine
_sensing_systems.html
[14] Akzo Nobel. Ultra with Biolux. Retrieved July 2, 2007 from
http://www.yachtpaint.com/usa//product_guide/antifouling/US_ultra_with_biolux.a
sp?ComponentID=9855&SourcePageID=6631#1
[15] Gillmer, Thomas C., and Johnson, Bruce. Introduction to Naval Architecture.
Annapolis, Maryland: Naval Institute Press. 1982
[16] Gaythwaite, John W. Design of Marine Facilities for the Berthing, Mooring, and
Repair of Vessels. Virginia: American Society of Civil Engineers, 2004.
[17] Hobibco, Inc. DTXM1075 - 8T Racing ESC with ABS Brakes and Reverse Spec Sheet.
Retrieved June 1, 2007 from http://www.duratrax.com/caraccys/dtxm1075.html
[18] Davis Instruments Corp. Weather. Retrieved June 5, 2007 from
http://www.davisnet.com/weather/index.asp
[19] Davis – Marine Mega Light Utility. Mega Light Utility. Retrieved August 16, 2007
from http://www.davisnet.com/Marine/products/marine_product.asp?pnum=03300

86
[20] Microbial Life Education Resources. Red Tide – General Collection. (2006) Retrieved
August 16, 2007 from
http://serc.carleton.edu/microbelife/topics/redtide/general.htm
[21] Howell, Brian. Evaluation of Neural Networks for Data Classification, Recognition,
and Navigation in the Marine Environment. PhD. Diss, Florida Institute of
Technology, 2004.
[22] Hydrolab Corporation. SCOUT® Operating Manual and Performance Manual. Austin,
TX: Hydrolab Corporation. 1988.
[23] USGlobalSat Incorporated. MR-350 WAAS Enabled Water Proof GPS Receiver. (2007)
Retrieved July 25, 2007 from http://www.usglobalsat.com/item.asp?itemid=2&catid
[24] Advanced Orientation Systems, Inc. EZ-Compass 3/Magnetometer rev-2. Retrieved
August 16, 2007 from http://www.aositilt.com/Compass.htm

87
Appendix A – Timeline of the AMB
January 2006 Initial hull design drawings in ProE completed by the AMB Senior Design Team
March 2006 Hull completely characterized using ProSurf by the AMB
team May 2006 Adam Outlaw begins assisting as a Graduate Student
Assistant and the hull is built, tested, and coated June 2006 First sea trial with the remote control system July 2006 Senior Design project complete August 2006 Autonomous implementation begins by Adam Outlaw May 2007 First version of autonomous control system completed
by Adam Outlaw and the AMB Senior Design team wins the President’s Award at the Senior Design Showcase
July 2007 First version of driver board and anchor board developed
by Larry Buist August 2007 Final version of control system completed and tested by
Adam Outlaw

88
Appendix B – Buoy Specifications
Table 11 Buoy Specs
Dry Weight 388 lbs (176 kg)
Displacement 570 lbs (258.5 kg)
Length 7 ft (2.13 m)
Beam 3 ft (0.91 m)
Max. Height with weather station 7 ft 10.5 in (2.40 m)
Max. Height without weather station 2 ft 8.5 in (0.83 m)
Draft 13 in
Total Wetted Surface Area 16.5 ft2 (1.53 m2)
Theoretical Hull Speed 6 ft/s (1.83 m/s)
Design Speed 4 ft/s (1.22 m/s)
Max. Anchoring Depth 33 ft (10 m)

89
Appendix C - Pro/Engineer® Renderings
Courtesy of AMB team: Zak Pfeiffer, Michelle Rees, Derek Tepley, and Safia Tappan

90
Isometric View
Back Isometric View

91
Top View
Bottom View

92
Front Panels View
Twisted Panels View

93
Bottom Panels View

94
Appendix D - ProSurf® Drawings
Courtesy of AMB team: Zak Pfeiffer, Michelle Rees, Derek Tepley, and Safia Tappan
Key:
Orange lines - Waterlines
Blue lines - Station lines
Green lines – Actual Hull lines
ProSurf® 3D Drawing of Buoy Hull

95
ProSurf® Front View Drawing displaying location of Water and Station lines
ProSurf® Bottom View Drawing

96
ProSurf® Side View Drawing

97
Appendix E - Technical Drawings
Courtesy of AMB team: Zak Pfeiffer, Michelle Rees, Derek Tepley, and Safia Tappan

98

99

100

101
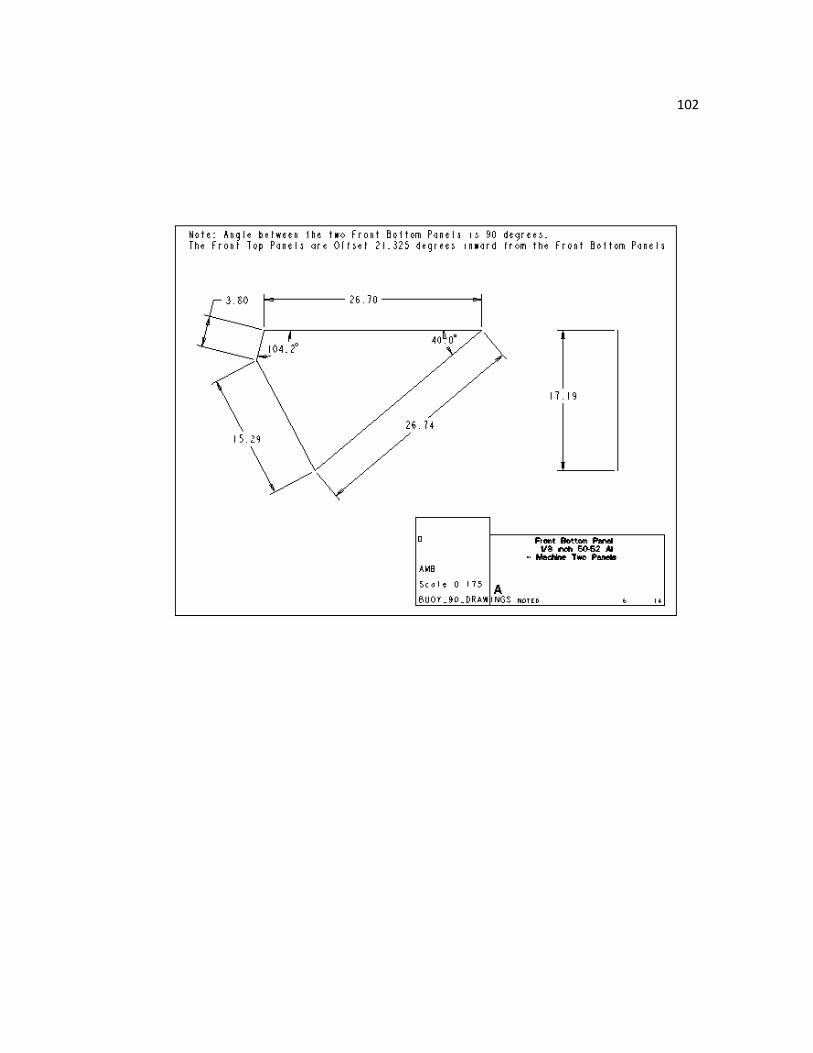
102

103

104

105

106

107

108

109

110

111
Appendix F – Motor Control Specifications
Table 12 DuraTrax IntelliSpeed 8T Racing Reverse ESC Specs [17] Input power: 7.2 to 8.4 volts DC (6-7 cells)
Operating frequency: 1.0 kHz BEC: 5.0 volts / 1.0 amp
On-Resistance: 0.002 ohms Max. Constant Current: 420 amps
Max. Peak Current: 1410 amps Acceleration time delay: 0.09, 0.16, and 0.27 seconds
Motor Turns Limit: no fewer than 8 turns Case Size (with heat sink): 1.48 x 1.34 x 0.57” (42 x 38 x 16 mm)
Weight (with heat sink): 2.54 oz. (72 g)

112
Appendix G – MR-350 GPS Specifications
Table 13 Specifications of MR-350 [23] GPS Chipset SiRF Star III Frequency L1, 1575.42 MHz C/A code 1.023 MHz chip rate Channels 20 channel all-in-view tracking Sensitivity -159 dBm Antenna Active patch antenna Accuracy Position 10 meters, 2D RMS (WAAS off)
~3 meters, 2D RMS (WAAS on) Velocity 0.1 m/sec 95% (SA off) Time 1micro-sec. synch to GPS time Datum Default WGS-84 Acquisition Rate Reacquisition 0.1 sec. average Hot start 8.0 sec. average Warm start 38 sec. average Cold start 42 sec. average Protocol GPS Protocol Default: NMEA 0183
Secondary: SiRF binary GPS Output
NMEA 0183 V2.2 supports commands: GGA, GSA, GSV, RMC SiRF binary: position, velocity, altitude, status and control
Baud rate 4,800 to 57,600 bps adjustable Dynamic Conditions Altitude 18,000 meters (60,000 feet) max Velocity 515 meters/sec. (1000 knots) max Acceleration Less than 4g Jerk 20m/sec **3 Power Main Power Input 4.5V ~ 6.5V DC input (USB or PS/2)

113 Power Consumption 80mA (Continuous mode)
35mA (Trickle power mode)
Dimensions Housing 2-3/8” Dia. x 1” H (exposed housing) Cable Length 180” (terminates to PS/2) Environmental Operating Temp -40°C~ 85°C (-40°F~ 185°F) Storage Temp -45°C~ 100°C (-49°F~ 212°F) Humidity 95% relative humidity Certifications: FCC / CE / IPx7

114
Appendix H – Energy Budget
Table 14 Energy Budget
Batteries 3 (50 Amp-hr) Deep Cycle Gel
Recharging 2 (30 watt) solar panels
Typical Distance Between Way Points 2 miles (10,560 ft, 3,219 m)
Time to Travel Between Way Points 46 minutes
Amp-hours used to travel design distance 24 Amp-hours
Amps used by motors during transect 28.32 amps total (14.16 amps each) (44 minutes)
Amps used by winch 30 amps (2 minutes)
Instrumentation usage 2 amps (all the time)
Average Charge Time per day 8 hours
Average charge supplied from solar panels 1.3 Amps per hour each (3.6 amps per hour)
Total Amps replaced to batteries each day 57.6 Amps

115
Appendix I – Exported Weatherlink Data
Table 15 Lab test results of Weatherlink 4.04 on May 31, 2007 Out Wind Hi Low Out Dew Wind Wind In In Archive
Date Time THI Temp Chill Temp Temp Hum Point Speed Hi Dir Barometer Temp Hum Period
5/31/2007 12:00 AM 78.2 78.3 78.3 78.4 78.1 52 59.2 0 0 --- 30.492 74.4 65 15
5/31/2007 12:15 AM 78.3 78 78 78.1 77.9 53 59.5 0 0 --- 30.481 74.3 67 15
5/31/2007 12:30 AM 78.3 77.9 77.9 78.1 77.9 53 59.4 0 0 --- 30.482 74.5 67 15
5/31/2007 12:45 AM 78.3 78.1 78.1 78.2 78 53 59.6 0 0 --- 30.48 74.6 67 15
5/31/2007 1:00 AM 78.2 78.3 78.3 78.4 78.2 52 59.2 0 0 --- 30.477 74.6 66 15
5/31/2007 1:15 AM 78.2 78.2 78.2 78.4 78.1 52 59.2 0 0 --- 30.472 74.4 65 15
5/31/2007 1:30 AM 78.4 78 78 78.1 77.9 54 60 0 0 --- 30.47 74.3 67 15
5/31/2007 1:45 AM 78.4 78 78 78.1 77.9 54 60 0 0 --- 30.474 74.5 67 15
5/31/2007 2:00 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.468 74.6 67 15
5/31/2007 2:15 AM 78.3 78.3 78.3 78.4 78.2 53 59.8 0 0 --- 30.469 74.7 67 15
5/31/2007 2:30 AM 78.2 78.4 78.4 78.5 78.2 52 59.3 0 0 --- 30.465 74.5 65 15
5/31/2007 2:45 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.468 74.4 67 15
5/31/2007 3:00 AM 78.4 78 78 78.1 78 54 60 0 0 --- 30.461 74.5 67 15
5/31/2007 3:15 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.457 74.6 67 15
5/31/2007 3:30 AM 78.4 78.3 78.3 78.4 78.2 54 60.3 0 0 --- 30.463 74.7 67 15
5/31/2007 3:45 AM 78.2 78.4 78.4 78.4 78.3 52 59.3 0 0 --- 30.456 74.5 65 15
5/31/2007 4:00 AM 78.4 78.1 78.1 78.3 78 54 60.1 0 0 --- 30.456 74.4 67 15
5/31/2007 4:15 AM 78.4 78 78 78.1 78 54 60 0 0 --- 30.449 74.5 67 15
5/31/2007 4:30 AM 78.4 78.2 78.2 78.3 78.1 54 60.2 0 0 --- 30.447 74.6 67 15
5/31/2007 4:45 AM 78.4 78.4 78.4 78.4 78.2 54 60.4 0 0 --- 30.448 74.7 67 15
5/31/2007 5:00 AM 78.1 78.4 78.4 78.5 78.3 51 58.8 0 0 --- 30.45 74.5 65 15
5/31/2007 5:15 AM 78.4 78.1 78.1 78.3 78 54 60.1 0 0 --- 30.45 74.4 67 15
5/31/2007 5:30 AM 78.4 78 78 78 78 54 60 0 0 --- 30.452 74.5 67 15
5/31/2007 5:45 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.454 74.6 67 15
5/31/2007 6:00 AM 78.4 78.3 78.3 78.4 78.2 54 60.3 0 0 --- 30.457 74.7 67 15
5/31/2007 6:15 AM 78 78.4 78.4 78.5 78.4 50 58.2 0 0 --- 30.461 74.6 64 15
5/31/2007 6:30 AM 78.4 78.2 78.2 78.4 78.1 54 60.2 0 0 --- 30.464 74.4 67 15
5/31/2007 6:45 AM 78.4 78 78 78.1 78 54 60 0 0 --- 30.467 74.5 67 15
5/31/2007 7:00 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.471 74.6 68 15
5/31/2007 7:15 AM 78.4 78.3 78.3 78.4 78.2 54 60.3 0 0 --- 30.475 74.7 67 15
5/31/2007 7:30 AM 78.1 78.4 78.4 78.5 78.3 51 58.8 0 0 --- 30.478 74.7 65 15
5/31/2007 7:45 AM 78.3 78.3 78.3 78.5 78.1 53 59.8 0 0 --- 30.478 74.4 67 15
5/31/2007 8:00 AM 78.4 78 78 78.1 78 54 60 0 0 --- 30.481 74.5 68 15
5/31/2007 8:15 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.482 74.6 67 15
5/31/2007 8:30 AM 78.4 78.3 78.3 78.4 78.1 54 60.3 0 0 --- 30.486 74.7 68 15
5/31/2007 8:45 AM 78 78.4 78.4 78.5 78.4 50 58.2 0 0 --- 30.493 74.6 64 15

116 5/31/2007 9:00 AM 78.4 78.3 78.3 78.4 78.1 54 60.3 0 0 --- 30.498 74.4 67 15
5/31/2007 9:15 AM 78.5 78.1 78.1 78.2 78.1 55 60.6 0 0 --- 30.5 74.6 68 15
5/31/2007 9:30 AM 78 78.2 78.2 78.3 78.1 50 58.1 0 0 --- 30.506 74.6 64 15
5/31/2007 9:45 AM 78.6 78 78 78.2 77.9 56 61.1 0 0 --- 30.501 74.4 68 15
5/31/2007 10:00 AM 78.4 78.1 78.1 78.2 78 54 60.1 0 0 --- 30.503 74.7 68 15
5/31/2007 10:15 AM 78.2 78.2 78.2 78.3 78 52 59.2 0 0 --- 30.502 74.4 64 15
5/31/2007 10:30 AM 78.7 78 78 78 77.9 57 61.5 0 0 --- 30.504 74.5 71 15
5/31/2007 10:45 AM 77.9 78.1 78.1 78.2 77.9 49 57.4 0 0 --- 30.507 74.5 61 15
5/31/2007 11:00 AM 78.6 77.7 77.7 77.9 77.7 56 60.8 0 0 --- 30.503 74.2 68 15
5/31/2007 11:15 AM 78.2 77.8 77.8 78 77.7 52 58.8 0 0 --- 30.505 74.7 66 15
5/31/2007 11:30 AM 78.4 77.9 77.9 78 77.8 54 59.9 0 0 --- 30.507 74.5 66 15
5/31/2007 11:45 AM 78.4 77.8 77.8 77.9 77.8 54 59.8 0 0 --- 30.512 74.6 67 15
5/31/2007 12:00 PM 78.3 77.8 77.8 77.9 77.7 53 59.3 0 0 --- 30.509 74.4 66 15
5/31/2007 12:15 PM 78.4 77.8 77.8 77.8 77.7 54 59.8 0 0 --- 30.509 74.5 67 15
5/31/2007 12:30 PM 78.3 77.7 77.7 77.8 77.6 53 59.2 0 0 --- 30.503 74.1 67 15
5/31/2007 12:45 PM 78.3 77.7 77.7 77.8 77.6 53 59.2 0 0 --- 30.501 74.3 66 15
5/31/2007 1:00 PM 78.4 77.7 77.7 77.8 77.6 54 59.7 0 0 --- 30.495 73.9 67 15
5/31/2007 1:15 PM 78.2 77.7 77.7 77.8 77.6 52 58.7 0 0 --- 30.493 74.2 66 15
5/31/2007 1:30 PM 78.4 77.7 77.7 77.8 77.6 54 59.7 0 0 --- 30.484 73.9 66 15
5/31/2007 1:45 PM 78.2 77.5 77.5 77.6 77.5 52 58.5 0 0 --- 30.488 74.1 65 15
5/31/2007 2:00 PM 77 77.4 77.4 77.5 77.3 55 60 0 0 --- 30.484 73.7 68 15
5/31/2007 2:15 PM 77 77.3 77.3 77.3 77.3 51 57.8 0 0 --- 30.488 74 64 15
5/31/2007 2:30 PM 77 77.3 77.3 77.5 77.2 56 60.4 0 0 --- 30.486 73.8 69 15
5/31/2007 2:45 PM 77.9 78.4 78.4 79.5 77.5 49 57.7 0 0 --- 30.48 74.2 65 15
5/31/2007 3:00 PM 80.4 80.3 80.3 81 79.5 52 61.1 0 0 --- 30.479 74.3 68 15
5/31/2007 3:15 PM 82.5 81.7 81.7 82.3 81.1 45 58.3 0 0 --- 30.481 74.6 63 15
5/31/2007 3:30 PM 84.6 82.6 82.6 82.8 82.3 48 60.9 0 0 --- 30.479 73.9 68 15
5/31/2007 3:45 PM 84 83.1 83.1 83.4 82.8 45 59.6 0 0 --- 30.475 74.3 65 15
5/31/2007 4:00 PM 84.4 83.3 83.3 83.4 83.2 47 61 0 0 --- 30.467 73.8 67 15
5/31/2007 4:15 PM 83.8 83.4 83.4 83.5 83.2 44 59.2 0 0 --- 30.467 74.1 66 15
5/31/2007 4:30 PM 84.2 83.3 83.3 83.5 83 46 60.4 0 0 --- 30.459 73.7 67 15
5/31/2007 4:45 PM 84.4 82.9 82.9 83.1 82.8 47 60.6 0 0 --- 30.456 73.9 69 15
5/31/2007 5:00 PM 84 82.6 82.6 82.8 82.3 45 59.1 0 0 --- 30.454 73.6 65 15
5/31/2007 5:15 PM 83 82.2 82.2 82.3 82.1 50 61.7 0 0 --- 30.449 73.8 72 15
5/31/2007 5:30 PM 82.3 82.3 82.3 82.4 82.2 43 57.6 0 0 --- 30.448 73.9 62 15
5/31/2007 5:45 PM 83 82.1 82.1 82.2 82 50 61.6 0 0 --- 30.451 73.7 71 15
5/31/2007 6:00 PM 82.3 82.2 82.2 82.3 82.1 43 57.5 0 0 --- 30.455 74.1 63 15
5/31/2007 6:15 PM 82.9 82 82 82.2 81.8 49 61 0 0 --- 30.451 73.5 70 15
5/31/2007 6:30 PM 83 82 82 82.2 81.8 50 61.5 0 0 --- 30.455 74.1 71 15
5/31/2007 6:45 PM 82.4 82.3 82.3 82.4 82.1 44 58.2 0 0 --- 30.453 74.1 64 15
5/31/2007 7:00 PM 82.8 82.2 82.2 82.3 82.2 48 60.6 0 0 --- 30.447 74 69 15
5/31/2007 7:15 PM 82.7 82.4 82.4 82.6 82.3 47 60.2 0 0 --- 30.448 74.5 68 15
5/31/2007 7:30 PM 84.2 82.7 82.7 82.7 82.6 46 59.8 0 0 --- 30.443 74.4 66 15
5/31/2007 7:45 PM 84.6 82.6 82.6 82.7 82.6 48 60.9 0 0 --- 30.444 74.4 69 15
5/31/2007 8:00 PM 84.4 82.7 82.7 82.8 82.6 47 60.4 0 0 --- 30.442 74.6 68 15
5/31/2007 8:15 PM 84 82.9 82.9 82.9 82.8 45 59.4 0 0 --- 30.444 74.5 65 15

117 5/31/2007 8:30 PM 84.4 82.8 82.8 82.8 82.7 47 60.5 0 0 --- 30.446 74.4 68 15
5/31/2007 8:45 PM 84.4 82.8 82.8 82.9 82.8 47 60.5 0 0 --- 30.45 74.6 68 15
5/31/2007 9:00 PM 83.8 83 83 83.1 82.9 44 58.9 0 0 --- 30.448 74.7 64 15
5/31/2007 9:15 PM 84.4 83 83 83.1 82.9 47 60.7 0 0 --- 30.453 74.4 68 15
5/31/2007 9:30 PM 84.4 82.9 82.9 82.9 82.8 47 60.6 0 0 --- 30.455 74.6 68 15
5/31/2007 9:45 PM 84.4 83 83 83.1 82.9 47 60.7 0 0 --- 30.46 74.8 68 15
5/31/2007 10:00 PM 83.8 83.1 83.1 83.2 83.1 44 59 0 0 --- 30.466 74.7 64 15
5/31/2007 10:15 PM 84.4 83 83 83.1 83 47 60.7 0 0 --- 30.466 74.5 68 15
5/31/2007 10:30 PM 84.4 83 83 83.1 83 47 60.7 0 0 --- 30.473 74.7 68 15
5/31/2007 10:45 PM 84.4 83.1 83.1 83.2 83 47 60.8 0 0 --- 30.475 74.9 68 15
5/31/2007 11:00 PM 83.8 83.2 83.2 83.3 83.2 44 59 0 0 --- 30.477 74.8 64 15
5/31/2007 11:15 PM 84.4 83.1 83.1 83.2 83 47 60.8 0 0 --- 30.474 74.6 67 15
5/31/2007 11:30 PM 84.4 83.1 83.1 83.2 83 47 60.8 0 0 --- 30.478 74.7 67 15
5/31/2007 11:45 PM 84.4 83.2 83.2 83.2 83.1 47 60.9 0 0 --- 30.471 74.9 67 15

118
Appendix J – LabVIEW® VI Control System
Figure 48 Front Panel

119
Figure 49 Sequence 0 Block Diagram Anchor "down" off
Figure 50 Sequence 1 Block Diagram Anchor “up” off
Figure 51 Sequence 2 Block Diagram Motors off

120
Figure 52 Sequence 3 Block Diagram Control System

121
Figure 53 GPS SubVI Front Panel

122
Figure 54 GPS SubVI Block Diagram

123
Figure 55 Compass SubVI Front Panel
Figure 56 Compass SubVI Block Diagram

124
Appendix K – Motor Control PIC Code
'***************Driver board serial interface*************** '***** "DBIntf" ****** ' See Larry Buist - <[email protected]> for detailed info ' Copyright Larry Buist for UTL TRISB=%00000000 ' all outputs TRISC=%00000001 ' MSB= input spd1 VAR BYTE spd2 VAR BYTE Slct VAR BIT WR VAR BIT X VAR BIT High PORTC.0 ' green High PORTC.1 wr=1 start: Low PORTC.1 'Red SerIn2 PORTC.7,84, [wait ("*"),DEC3 spd1,DEC3 spd2] Low PORTC.0 'Grn LED ON PORTB=spd1 Pause 10 PORTC.4= 1 'dac select Pause 10 PORTC.5=0 ' pin 16 Pause 10 PORTC.5=1 PORTB= spd2 Pause 10 PORTC.4=0 Pause 10 PORTC.5=0 ' pin 16 Pause 10 PORTC.5=1 High PORTC.0 ' green High PORTC.1 GoTo start

125
Appendix L – GPS Raw Data
$GPGGA,011703.000,2803.9184,N,08037.2971,W,1,05,1.8,31.0,M,-30.8,M,,0000*5E $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011703.000,A,2803.9184,N,08037.2971,W,0.06,91.35,170807,,*28 $GPGGA,011704.000,2803.9184,N,08037.2974,W,1,05,1.8,30.0,M,-30.8,M,,0000*5D $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPGSV,3,1,10,28,73,043,29,17,54,326,33,08,37,190,44,04,37,216,24*7F $GPGSV,3,2,10,20,28,092,38,11,25,045,33,27,17,177,40,02,04,219,23*7C $GPGSV,3,3,10,25,01,165,24,09,00,325,*77 $GPRMC,011704.000,A,2803.9184,N,08037.2974,W,0.40,173.70,170807,,*14 $GPGGA,011705.000,2803.9186,N,08037.2977,W,1,05,1.8,28.7,M,-30.8,M,,0000*53 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011705.000,A,2803.9186,N,08037.2977,W,0.76,281.96,170807,,*17 $GPGGA,011706.000,2803.9189,N,08037.2979,W,1,05,1.8,27.3,M,-30.8,M,,0000*5A $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011706.000,A,2803.9189,N,08037.2979,W,1.00,48.70,170807,,*2A $GPGGA,011707.000,2803.9190,N,08037.2981,W,1,05,1.8,26.2,M,-30.8,M,,0000*54 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011707.000,A,2803.9190,N,08037.2981,W,0.93,235.04,170807,,*14 $GPGGA,011708.000,2803.9194,N,08037.2988,W,1,05,1.8,23.7,M,-30.8,M,,0000*56 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011708.000,A,2803.9194,N,08037.2988,W,0.23,227.51,170807,,*1E $GPGGA,011709.000,2803.9199,N,08037.2994,W,1,05,1.8,20.6,M,-30.8,M,,0000*55 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPGSV,3,1,11,28,73,043,39,17,54,326,37,04,37,216,30,08,37,190,45*7F $GPGSV,3,2,11,20,28,092,36,11,25,045,33,27,17,177,42,02,04,219,20*72 $GPGSV,3,3,11,25,01,165,21,09,00,325,,48,24,250,27*4B $GPRMC,011709.000,A,2803.9199,N,08037.2994,W,0.24,289.01,170807,,*19 $GPGGA,011710.000,2803.9203,N,08037.3000,W,1,05,1.8,17.9,M,-30.8,M,,0000*53 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011710.000,A,2803.9203,N,08037.3000,W,0.15,296.87,170807,,*16 $GPGGA,011711.000,2803.9205,N,08037.3001,W,1,05,1.8,17.4,M,-30.8,M,,0000*58 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011711.000,A,2803.9205,N,08037.3001,W,0.08,40.03,170807,,*29 $GPGGA,011712.000,2803.9208,N,08037.3003,W,1,05,1.8,16.8,M,-30.8,M,,0000*59 $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011712.000,A,2803.9208,N,08037.3003,W,0.45,300.32,170807,,*19 $GPGGA,011713.000,2803.9211,N,08037.3005,W,1,05,1.8,15.6,M,-30.8,M,,0000*5B $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35 $GPRMC,011713.000,A,2803.9211,N,08037.3005,W,0.33,90.08,170807,,*24 $GPGGA,011714.000,2803.9212,N,08037.3006,W,1,05,1.8,15.0,M,-30.8,M,,0000*5A $GPGSA,A,3,08,27,17,28,20,,,,,,,,3.9,1.8,3.4*35

126
Appendix M – EZ-Compass 3 Specifications
Table 16 EZ-Compass 3 Specs [24]
Parameter Specification Units/description
Azimuth Range 0--360 deg, continuous
Azimuth Resolution 12 (0.08) bit (deg)
Azimuth Repeatability < 0.25 deg, typical horizontal
Azimuth Accuracy < 0.5 deg, typical horizontal
Magnetic Field +-2 Gauss typical
Magnetic Resolution < 1 mGauss typical
Pitch Range +70 to -70 arcdeg linear
Roll Range +70 to -70 arcdeg linear
Pitch Range +80 to -80 arcdeg near-linear
Roll Range +80 to -80 arcdeg near-linear
Tilt Resolution 12 bit full scale, both axis
Tilt Repeatability <2 bits
Temperature -40 to +85 deg C
Communication 300--38400 baud,8,N,1 RS-232 and RS-422 standards
Supply 5 +-1% Vdc well regulated
Size 2"W x 2.5"L x 1.0"H PCB Board
NMEA-0183 mode 5 select modes 1999 Revision

127
Appendix N – Original Anchor Control PIC Code
' PIC program for---- Anchor control circuit "Adam1" ' See Larry Buist - <[email protected]> for detailed info ' Copywrite Larry Buist for UTL TRISC = 0 ' Set portC to all outputs TRISB = 255 ' Set portB to all inputs T VAR BIT ' microSW X VAR BYTE ' down signal Y VAR BYTE ' hall effect pulse Z VAR BYTE ' accumulator W VAR BIT ' up signal dwncnt VAR WORD upcnt VAR WORD Low PORTC.0 ' disengage up motor Low PORTC.1 ' disengage down motor Low PORTC.2 ' disengage bypass (not used) Loop1: ' monitor LabView signals Up or Down - wait for high Low PORTC.5 ' clear down signal w=PORTB.7 IF w=1 Then down x= PORTB.6 IF x=1 Then up GoTo loop1 Down: High PORTC.1 ' engage down motor loop2: Y=PORTB.5 ' check hall effect output IF y=1 Then ' If hall effect high then accumulate count and leave loop dwncnt=1 GoTo loop3 EndIF z=z+1 ' start accumulating if hall effect stays low IF z> 5000 Then ' hall effect low for 5000 counts - motor stopped - leave loop Low PORTC.1 ' disengage down motor z=0 ' clr accumulator GoTo loop1 ' no more hall effect count - EndIF t= PORTB.4 IF t=0 Then z=0 High PORTC.5 ' anchor down signal to LabView

128
GoTo loop1 EndIF GoTo loop2 ' continue in down anchor mode loop3: ' look for the hall effect to go low again w=PORTB.5 IF w=0 Then GoTo loop2 ' if low repeat hall effect count GoTo loop3 Up: High PORTC.0 ' engage up motor loop4: Y=PORTB.5 ' check hall effect output IF y=1 Then ' If hall effect high then accumulate count and leave loop upcnt=1 GoTo loop5 EndIF z=z+1 ' start accumulating if hall effect stays low IF z> 5000 Then ' hall effect low for 5000 counts - motor stopped - leave loop Low PORTC.0 ' disengage up motor z=0 ' clr accumulator GoTo loop1 ' no more hall effect count - return to LabView signal monitor loop EndIF IF upcnt=>dwncnt Then ' upcount and downcnt match - anchor is up High PORTC.5 ' anchor down signal to LabView Low PORTC.0 ' disengage up motor upcnt=0:dwncnt=0 GoTo loop1 ' return to LabView signal monitor loop EndIF GoTo loop4 ' continue in down anchor mode loop5: ' look for the hall effect to go low again w=PORTB.5 IF w=0 Then GoTo loop4 ' if low repeat hall effect count GoTo loop5

129
Appendix O – Updated Anchor Control PIC Code
' PIC program for---- Anchor control circuit "anchor3" ' See Larry Buist - <[email protected]> for detailed info ' Copyright Larry Buist for UTL TRISC = 0 ' Set portC to all outputs TRISB = 255 ' Set portB to all inputs X VAR BYTE ' down signal W VAR BIT ' up signal Low PORTC.0 ' disengage up motor Low PORTC.1 ' disengage down motor Low PORTC.2 ' disengage bypass (not used) Loop1: ' monitor LabView signals Up or Down - wait for high w=PORTB.7 ' pin 28 x=PORTB.6 ' pin 27 IF w=1 AND x=0 Then down IF x=1 AND w=0 Then up GoTo loop1 up: Low PORTC.1 High PORTC.0 GoTo loop1 down: Low PORTC.0 High PORTC.1 GoTo loop1