development of a position monitoring system using the ... · 분, 디스플레이 부분,...
TRANSCRIPT
工學碩士學位論文
무선 랜 네트워크를 이용한 측
모니터링 시스템 개발
Development of A Position Monitoring System
Using The Wireless Lan Network
2006年 2月
仁荷大學校 大學院
地理情報工學科
李 眞 英
工學碩士學位論文
무선 랜 네트워크를 이용한 측
모니터링 시스템 개발
Development of A Position Monitoring System
Using The Wireless Lan Network
2006年 2月
仁荷大學校 大學院
地理情報工學科
李 眞 英
指 敎授 金 秉 國
이 論文을 工學碩士學位 論文으로 提出함
本 論文을 李 眞 英의 工學碩士學位 論文으로 認定함
2006 년 2 월
主審______________
副審______________
委員______________
- i -
요 지
GPS는 치정보를 얻을 수 있는 일반 인 방법이다 그러나 가시 성의
부족과 신호의 미약으로 건물 집지역이나 실내에서는 측 가 불가능하
다 실외나 실내 측 가 가능한 방법으로 이동통신망을 사용한 측 서비
스가 제공되고 있는데 셀의 크기나 환경에 따라 정확도가 수십에서
수백 미터까지 달라진다 그리고 다른 사업자가 자신의 고객에게 치정
보를 제공하고자 할 때 이동통신망 사업자와 연계하여 제공해야하므로
제약이 따른다 RFID나 UWB 등도 치정보를 제공하기 해 연구가 진
행 에 있지만 장비가 고가이고 아직 측 서비스에 이용되고 있지 않
다
무선 랜 네트워크의 경우 요즘 공공건물 등에 설치가 증가하면서 실내측
의 가능성에 한 연구가 진행 이다 무선 랜 네트워크 기반의 측
는 AP(Access point)의 신호세기를 이용한다 AP는 다른 측 기술에 이
용되는 장비들보다 가이며 노트북이나 PDA 등을 사용하는 모바일 사
용자들이 증가하고 있다 따라서 측 시스템만 개발되어 있다면 사용자
의 모바일 기기에 소 트웨어를 설치하여 바로 측 서비스에 이용할 수
있다 그리고 서비스를 제공하는 사업자는 자신의 사업장에 AP를 설치함
으로써 자신의 목 에 맞는 치정보 서비스를 제공할 수 있다는 장 이
있다
본 연구에서는 가의 장비를 사용한 실내측 시스템을 개발하기 하
여 AP의 신호세기를 사용하 다 우선 측 환경에서의 AP의 신호세기
특성을 분석하 고 측 를 할 때 신호세기 만을 사용한 Euclidean 거리
를 이용한 방법과 신호세기와 사용자의 이동 경로에 따른 치를 추 하
여 측 에 이용한 Bayesian 추론을 이용한 방법을 구 하여 정확도를 비
교 분석하 다
무선 랜 네트워크를 이용한 실내측 방법은 렴한 비용의 AP를 사용
- ii -
하여 직 시스템을 구 할 수 있고 모바일 환경으로의 속도 가능하다
따라서 가형의 실내측 시스템 개발에 많이 사용될 수 있을 것으로 기
된다
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
工學碩士學位論文
무선 랜 네트워크를 이용한 측
모니터링 시스템 개발
Development of A Position Monitoring System
Using The Wireless Lan Network
2006年 2月
仁荷大學校 大學院
地理情報工學科
李 眞 英
指 敎授 金 秉 國
이 論文을 工學碩士學位 論文으로 提出함
本 論文을 李 眞 英의 工學碩士學位 論文으로 認定함
2006 년 2 월
主審______________
副審______________
委員______________
- i -
요 지
GPS는 치정보를 얻을 수 있는 일반 인 방법이다 그러나 가시 성의
부족과 신호의 미약으로 건물 집지역이나 실내에서는 측 가 불가능하
다 실외나 실내 측 가 가능한 방법으로 이동통신망을 사용한 측 서비
스가 제공되고 있는데 셀의 크기나 환경에 따라 정확도가 수십에서
수백 미터까지 달라진다 그리고 다른 사업자가 자신의 고객에게 치정
보를 제공하고자 할 때 이동통신망 사업자와 연계하여 제공해야하므로
제약이 따른다 RFID나 UWB 등도 치정보를 제공하기 해 연구가 진
행 에 있지만 장비가 고가이고 아직 측 서비스에 이용되고 있지 않
다
무선 랜 네트워크의 경우 요즘 공공건물 등에 설치가 증가하면서 실내측
의 가능성에 한 연구가 진행 이다 무선 랜 네트워크 기반의 측
는 AP(Access point)의 신호세기를 이용한다 AP는 다른 측 기술에 이
용되는 장비들보다 가이며 노트북이나 PDA 등을 사용하는 모바일 사
용자들이 증가하고 있다 따라서 측 시스템만 개발되어 있다면 사용자
의 모바일 기기에 소 트웨어를 설치하여 바로 측 서비스에 이용할 수
있다 그리고 서비스를 제공하는 사업자는 자신의 사업장에 AP를 설치함
으로써 자신의 목 에 맞는 치정보 서비스를 제공할 수 있다는 장 이
있다
본 연구에서는 가의 장비를 사용한 실내측 시스템을 개발하기 하
여 AP의 신호세기를 사용하 다 우선 측 환경에서의 AP의 신호세기
특성을 분석하 고 측 를 할 때 신호세기 만을 사용한 Euclidean 거리
를 이용한 방법과 신호세기와 사용자의 이동 경로에 따른 치를 추 하
여 측 에 이용한 Bayesian 추론을 이용한 방법을 구 하여 정확도를 비
교 분석하 다
무선 랜 네트워크를 이용한 실내측 방법은 렴한 비용의 AP를 사용
- ii -
하여 직 시스템을 구 할 수 있고 모바일 환경으로의 속도 가능하다
따라서 가형의 실내측 시스템 개발에 많이 사용될 수 있을 것으로 기
된다
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

本 論文을 李 眞 英의 工學碩士學位 論文으로 認定함
2006 년 2 월
主審______________
副審______________
委員______________
- i -
요 지
GPS는 치정보를 얻을 수 있는 일반 인 방법이다 그러나 가시 성의
부족과 신호의 미약으로 건물 집지역이나 실내에서는 측 가 불가능하
다 실외나 실내 측 가 가능한 방법으로 이동통신망을 사용한 측 서비
스가 제공되고 있는데 셀의 크기나 환경에 따라 정확도가 수십에서
수백 미터까지 달라진다 그리고 다른 사업자가 자신의 고객에게 치정
보를 제공하고자 할 때 이동통신망 사업자와 연계하여 제공해야하므로
제약이 따른다 RFID나 UWB 등도 치정보를 제공하기 해 연구가 진
행 에 있지만 장비가 고가이고 아직 측 서비스에 이용되고 있지 않
다
무선 랜 네트워크의 경우 요즘 공공건물 등에 설치가 증가하면서 실내측
의 가능성에 한 연구가 진행 이다 무선 랜 네트워크 기반의 측
는 AP(Access point)의 신호세기를 이용한다 AP는 다른 측 기술에 이
용되는 장비들보다 가이며 노트북이나 PDA 등을 사용하는 모바일 사
용자들이 증가하고 있다 따라서 측 시스템만 개발되어 있다면 사용자
의 모바일 기기에 소 트웨어를 설치하여 바로 측 서비스에 이용할 수
있다 그리고 서비스를 제공하는 사업자는 자신의 사업장에 AP를 설치함
으로써 자신의 목 에 맞는 치정보 서비스를 제공할 수 있다는 장 이
있다
본 연구에서는 가의 장비를 사용한 실내측 시스템을 개발하기 하
여 AP의 신호세기를 사용하 다 우선 측 환경에서의 AP의 신호세기
특성을 분석하 고 측 를 할 때 신호세기 만을 사용한 Euclidean 거리
를 이용한 방법과 신호세기와 사용자의 이동 경로에 따른 치를 추 하
여 측 에 이용한 Bayesian 추론을 이용한 방법을 구 하여 정확도를 비
교 분석하 다
무선 랜 네트워크를 이용한 실내측 방법은 렴한 비용의 AP를 사용
- ii -
하여 직 시스템을 구 할 수 있고 모바일 환경으로의 속도 가능하다
따라서 가형의 실내측 시스템 개발에 많이 사용될 수 있을 것으로 기
된다
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- i -
요 지
GPS는 치정보를 얻을 수 있는 일반 인 방법이다 그러나 가시 성의
부족과 신호의 미약으로 건물 집지역이나 실내에서는 측 가 불가능하
다 실외나 실내 측 가 가능한 방법으로 이동통신망을 사용한 측 서비
스가 제공되고 있는데 셀의 크기나 환경에 따라 정확도가 수십에서
수백 미터까지 달라진다 그리고 다른 사업자가 자신의 고객에게 치정
보를 제공하고자 할 때 이동통신망 사업자와 연계하여 제공해야하므로
제약이 따른다 RFID나 UWB 등도 치정보를 제공하기 해 연구가 진
행 에 있지만 장비가 고가이고 아직 측 서비스에 이용되고 있지 않
다
무선 랜 네트워크의 경우 요즘 공공건물 등에 설치가 증가하면서 실내측
의 가능성에 한 연구가 진행 이다 무선 랜 네트워크 기반의 측
는 AP(Access point)의 신호세기를 이용한다 AP는 다른 측 기술에 이
용되는 장비들보다 가이며 노트북이나 PDA 등을 사용하는 모바일 사
용자들이 증가하고 있다 따라서 측 시스템만 개발되어 있다면 사용자
의 모바일 기기에 소 트웨어를 설치하여 바로 측 서비스에 이용할 수
있다 그리고 서비스를 제공하는 사업자는 자신의 사업장에 AP를 설치함
으로써 자신의 목 에 맞는 치정보 서비스를 제공할 수 있다는 장 이
있다
본 연구에서는 가의 장비를 사용한 실내측 시스템을 개발하기 하
여 AP의 신호세기를 사용하 다 우선 측 환경에서의 AP의 신호세기
특성을 분석하 고 측 를 할 때 신호세기 만을 사용한 Euclidean 거리
를 이용한 방법과 신호세기와 사용자의 이동 경로에 따른 치를 추 하
여 측 에 이용한 Bayesian 추론을 이용한 방법을 구 하여 정확도를 비
교 분석하 다
무선 랜 네트워크를 이용한 실내측 방법은 렴한 비용의 AP를 사용
- ii -
하여 직 시스템을 구 할 수 있고 모바일 환경으로의 속도 가능하다
따라서 가형의 실내측 시스템 개발에 많이 사용될 수 있을 것으로 기
된다
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- ii -
하여 직 시스템을 구 할 수 있고 모바일 환경으로의 속도 가능하다
따라서 가형의 실내측 시스템 개발에 많이 사용될 수 있을 것으로 기
된다
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- iii -
ABSTRACT
GPS is general method which is able to obtain position information
But this method is impossible indoor positioning It is offering
positioning service using cell network which is able to positioning at
indoor or outdoor environment The accuracy of positioning method
using cell network differ from several tense miter to several hundreds
miter according to cell-size and propagation environments Also when
other sponsors attempt to offer positioning service to ones customer
they are curbed because they offer service in connection with offerer
of cell network It is trying research using RFID UWB etc for
furnishing positioning information But these equipments are expensive
and these services are not offering yet
There is increasing foundation of wireless lan network at buildings
and airport etc So it is attempting study about possibility of indoor
positioning WLan-Based indoor positioning use signal strength of
Access point If positioning system was developing we immediately
could use in positioning service installing software to mobile
equipment because AP is low cost compared with the other
equipments and it is increasing mobile users using notebook and PDA
etc Also sponsors can offer positioning information service serving
ones purpose to users by setting up AP at ones building
In this paper I used signal strength of AP to develop indoor
positioning system using low-cost equipments First I analyzed
characters of signal strength of AP Next I embodied Euclidean
distance method algorithm using only signal strength and Bayesian
inference method using signal strength and tracking points of user
- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- iv -
And I analyzed the accuracy of these algorithms
Indoor positioning method using wireless lan network directly is able
to develop system using low-cost AP And user can contact at mobile
computing Therefore this study is expected to be able to use in
development of low-cost indoor positioning system
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- v -
lt제목 차례gt
제 1 장 서 론 1
11 연구 배경 목 1
12 연구 내용 범 3
제 2 장 실내측 방법론 5
21 측 방법론 5
211 치 결정 방법 5
2111 삼각측량(Triangulation) 5
2112 장면 분석(Scene Analysis) 6
2113 근 방식(Proximity) 6
2114 Ad-hoc 네트워크 방식 7
212 측 시스템 8
2121 이동통신망을 이용한 측 8
2122 Active Badge System 10
2123 Active Bat System 11
2124 Criket System 12
2125 RADAR 시스템 13
2126 RFID 태그를 이용한 방법 13
2127 UWB를 사용한 측 시스템 16
22 무선 랜 네트워크를 이용한 실내측 알고리즘 17
221 무선 신호 달 방법 17
222 Euclidean 거리를 이용한 방법 18
223 확률추론을 이용한 방법 19
2231 Gaussian 확률 도함수를 이용한 방법 19
2232 Bayesian 추론을 이용한 방법 20
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- vi -
제 3 장 AP의 신호세기 특성 분석 22
31 실험 환경 22
32 24시간 신호세기 분석 23
33 벽의 신호 감쇄율 분석 25
제 4 장 측 모니터링 시스템 구 29
41 실내측 시스템 구 29
411 신호세기 측정 부분 31
412 측 부분 33
413 서버와의 통신 부분 33
414 디스 이 부분 34
42 모니터링 서버 부분 34
43 신호세기 데이터베이스 작성 35
제 5 장 측 정확도 분석 37
51 알려진 치에서의 정확도 분석 37
52 알려진 치의 근처에서 수행한 정확도 분석 40
53 2m간격의 신호세기 데이터베이스 작성 41
제 6 장 결론 고찰 43
참고문헌45
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- vii -
lt표 차례gt
표 21 RFID의 주 수 역에 따른 태그의 특성[8]15
표 31 24시간 신호세기 변화의 평균과 표 편차 24
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차 27
표 41 신호세기 처리에 사용되는 함수 32
표 42 측 부분에서 작성된 함수 33
표 43 통신 부분에서 사용되는 함수 34
표 44 서버 통신 부분에서 사용되는 함수 35
표 51 각 치에서의 측 결과의 RMSE 비교(단 (m)) 39
표 53 알려진 치의 근처에서 수행한 실험의 RMSE(단 (m)) 40
표 55 각 치에서 실험한 측 결과의 RMSE(단 (m)) 42
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- viii -
lt그림 차례gt
그림 11 연구 내용 4
그림 21 AOA방식의 측 원리 9
그림 22 TOA방식의 측 원리 9
그림 23 TDOA방식의 측 원리 10
그림 24 Active Bat System의 측 원리 11
그림 25 Multilateration의 [5] 12
그림 26 RFID를 이용한 측 원리 14
그림 31 실험환경 인하 학교 4호 신 3층 22
그림 32 실험 장비 23
그림 33 AP 4로부터 측정한 신호세기 특성(24시간) 24
그림 34 AP 5로부터 측정한 신호세기 특성(24시간) 24
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경 26
그림 36 벽에 의한 신호 감쇄 특성 분석 26
그림 41 측 시스템 구성도 30
그림 42 측 시스템 30
그림 43 NDIS 드라이버 구성도[14] 32
그림 44 신호세기 데이터베이스 작성 치 36
그림 45 신호세기 데이터베이스 작성 36
그림 51 좌표 (4 4)의 정확도 분석 38
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 1 -
제 1 장 서 론
11 연구 배경 목
무선통신 기술의 발 으로 장소의 제약 없이 언제 어디서나 원하는 정보
를 손쉽게 획득할 수 있게 되었고 치정보에 한 심이 증가하면서
사용자의 치정보를 신속하게 악하여 이를 각종 서비스와 연계하여 제
공하는 치기반서비스(Location Based Service LBS)로의 환도 빠르
게 이루어지고 있다 재 치정보를 획득하는 일반 인 방법으로 GPS
를 이용한 측 방법이 가장 많이 사용되고 있다 GPS를 이용한 측 는
정 처리 시 수 mm까지의 측 정확도를 제공하나 실내에서는 가시 성
의 부족과 신호의 미약으로 인해 측 가 불가능하다는 단 이 있다 치
기반서비스의 용분야 활용이 다양해지면서 실외뿐만 아니라 실내 환
경에서도 치정보를 바탕으로 한 서비스의 필요성이 증가하고 있으며 실
내에서도 손쉽고 정확하게 측 할 수 있는 연구가 활발하게 진행 이다
실내에서 치정보를 획득하기 한 방법으로 이동통신망 RFID(Radio
Frequency Identification) UWB(Ultra Wide-band) 무선 랜 등이 많이
사용되고 있다 그러나 이동통신망을 이용한 방법은 무선 단말기의 통신
이 가능한 지역에서만 측 가 가능하고 셀의 크기에 의해 제약이 따르며
실내 환경에서의 신호 반사작용 등 환경에 따라 수십에서 수백 미터
까지의 치오차가 발생한다 RFID의 경우 유비쿼터스(Ubiquitous) 기술
부분에서 치인식을 해 이용 가능성이 모색되고 있으나 높은 측 정
확도를 목표로 할 경우 고가의 장비를 사용해야한다 재 무선 랜 네트
워크는 노트북이나 PDA 등의 모바일 기기에서 가장 활발하게 사용 에
있으며 학교 공서 공항 등의 공공장소에 설치가 빠르게 증가하고 있
다 따라서 무선 랜 네트워크를 이용한 실내측 는 다음과 같은 장 이
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
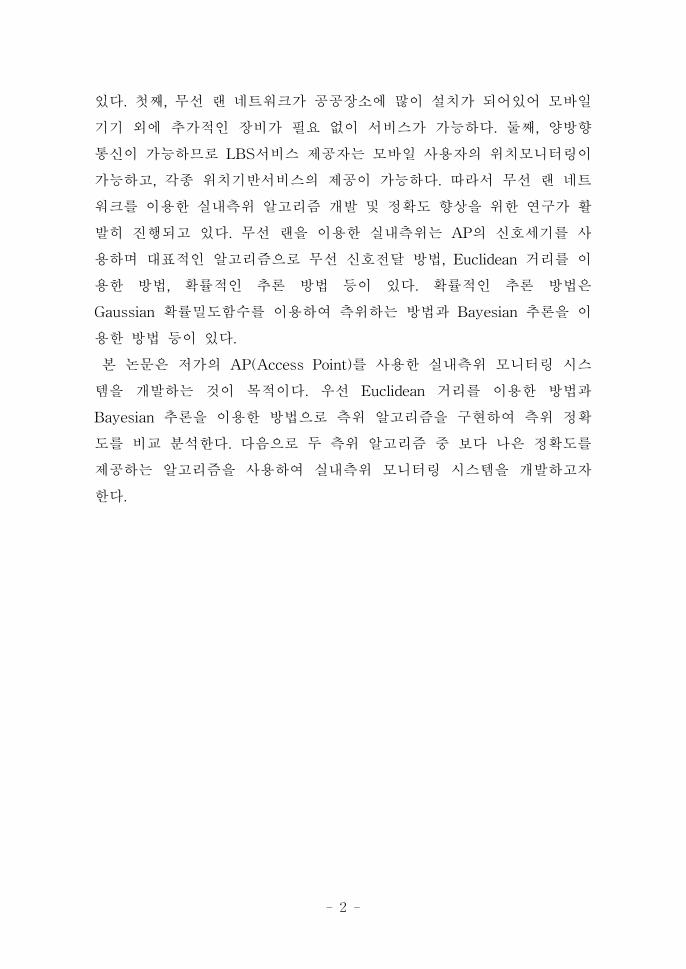
- 2 -
있다 첫째 무선 랜 네트워크가 공공장소에 많이 설치가 되어있어 모바일
기기 외에 추가 인 장비가 필요 없이 서비스가 가능하다 둘째 양방향
통신이 가능하므로 LBS서비스 제공자는 모바일 사용자의 치모니터링이
가능하고 각종 치기반서비스의 제공이 가능하다 따라서 무선 랜 네트
워크를 이용한 실내측 알고리즘 개발 정확도 향상을 한 연구가 활
발히 진행되고 있다 무선 랜을 이용한 실내측 는 AP의 신호세기를 사
용하며 표 인 알고리즘으로 무선 신호 달 방법 Euclidean 거리를 이
용한 방법 확률 인 추론 방법 등이 있다 확률 인 추론 방법은
Gaussian 확률 도함수를 이용하여 측 하는 방법과 Bayesian 추론을 이
용한 방법 등이 있다
본 논문은 가의 AP(Access Point)를 사용한 실내측 모니터링 시스
템을 개발하는 것이 목 이다 우선 Euclidean 거리를 이용한 방법과
Bayesian 추론을 이용한 방법으로 측 알고리즘을 구 하여 측 정확
도를 비교 분석한다 다음으로 두 측 알고리즘 보다 나은 정확도를
제공하는 알고리즘을 사용하여 실내측 모니터링 시스템을 개발하고자
한다
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 3 -
12 연구 내용 범
본 연구에서는 가의 장비인 무선 랜 네트워크를 사용하여 실내 환경에
서 사용자의 치를 측 하고 서버에서 모니터링 하는 시스템을 개발하기
한 연구를 수행하 다 연구는 크게 실험 환경에서 AP의 신호세기 특
성을 분석하는 것과 실내측 알고리즘 구 분석 실내측 모니터링
서버 개발로 이루어져 있다 측 는 AP의 신호세기를 사용하므로 측
결과는 신호세기의 변화에 종속 이다 따라서 실험환경에서의 신호세기
의 특성을 분석하여 향상된 정확도를 제공하는 측 알고리즘을 찾아야
한다 AP의 신호세기 특성은 24시간 동안 신호세기 변화와 벽에 의한 감
쇄효과를 찰하여 분석하 다
무선 랜 네트워크를 이용한 실내측 방법에는 표 으로 무선 신호
달 방법 Euclidean 거리를 이용한 방법 확률 인 추론 방법 등이 있다
무선 신호 달 방법은 임의의 치에서 모바일 기기가 측정한 AP의 신호
세기와 무선 신호 달식을 사용하여 AP와 모바일 기기간의 거리를 구하
여 삼각측량법으로 치를 결정한다 Euclidean 거리를 이용한 방법과 확
률 인 추론 방법은 측 환경에서 미리 정해진 치에서의 신호세기 데
이터베이스가 필요하다 신호세기 데이터베이스는 치 좌표 신호세기 평
균 표 편차로 구성된다 Euclidean 거리를 이용한 방법은 치 좌표 신
호세기 평균만을 사용하고 확률 인 추론 방법은 데이터베이스의 자료를
모두 사용한다 Euclidean 거리를 이용한 방법은 측정한 신호세기와 데이
터베이스의 신호세기 간의 거리차가 최소가 되는 지 을 모바일 기기의
치로 결정한다 확률 인 추론 방법은 Gaussian 확률 도함수나
Bayesian 추론식을 이용하며 이들 값이 최 가 되는 지 을 사용자의
치로 결정한다 본 논문에서 실내측 알고리즘은 Euclidean 거리를 이용
한 방법과 Bayesian 추론을 이용한 방법을 구 하 다 Euclidean 거리를
이용한 방법은 신호세기만을 사용하여 측 한다 그리고 Bayesian 추론
방법은 신호세기와 사용자의 이동경로를 추 한 좌표를 사용하여 치를
결정한다 본 논문에서 구 된 두 알고리즘의 정확도를 비교 분석하고 보
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
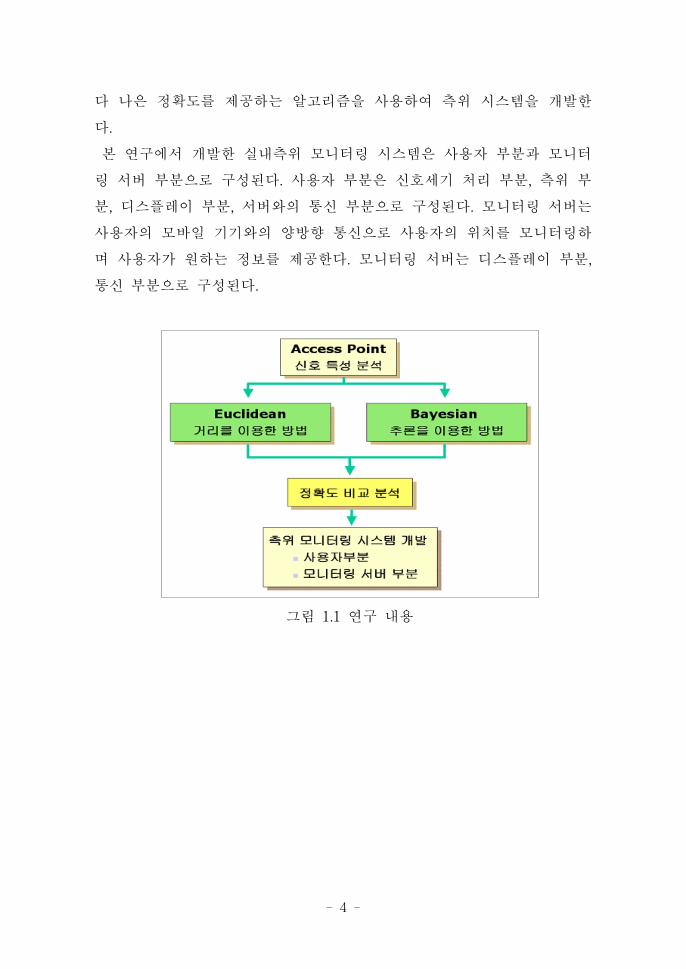
- 4 -
다 나은 정확도를 제공하는 알고리즘을 사용하여 측 시스템을 개발한
다
본 연구에서 개발한 실내측 모니터링 시스템은 사용자 부분과 모니터
링 서버 부분으로 구성된다 사용자 부분은 신호세기 처리 부분 측 부
분 디스 이 부분 서버와의 통신 부분으로 구성된다 모니터링 서버는
사용자의 모바일 기기와의 양방향 통신으로 사용자의 치를 모니터링하
며 사용자가 원하는 정보를 제공한다 모니터링 서버는 디스 이 부분
통신 부분으로 구성된다
그림 11 연구 내용
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 5 -
제 2 장 실내측 방법론
21 측 방법론
모바일 컴퓨 장비와 무선 네트워크의 확산으로 많은 사람들이 쉽게 모
바일 환경에 속함으로써 시간이나 장소에 상 없이 자신이 원하는 정보
를 얻을 수 있게 되었다 한 사용자들의 치 인식 시스템과 서비스에
한 심사도 증가하 다 일반 으로 치 정보를 얻기 해 GPS를 이
용하며 재 이동통신망을 이용한 측 서비스도 제공되고 있다 GPS와
이동통망은 범 한 역에 하여 치정보 획득이 가능하다 그러나
GPS와 이동통신망은 건물 집지역이나 건물 지하 실내 등 환경이
좋지 않은 곳에서 측 가 불가능하거나 큰 거리오차를 포함하는 단 이
있다 GPS 이동통신망을 이용한 측 가 불가능한 지역에서의 측 를
해 외선 음 UWB 무선 네트워크 등을 이용한 방법들이 연구되고
있으며 이들 방법은 센서로 네트워크를 구성해 측 한다 따라서 범
한 역보다는 작은 역에서 네트워크를 구성해 측 시스템을 구 한
다 재 개발된 측 시스템으로는 Harter 등에 의해 개발된 외선을
이용한 Active Badge와 마이크로소 트사의 Bahl 등에 의해 개발된 무선
네트워크의 RF 신호를 이용한 RADAR 시스템 등이 있다 외선 무선
네트워크 등을 이용한 방법 외에 이동하는 노드(Node)를 이용하여 임시
로 구성하는 Ad-hoc네트워크 방식이 연구되고 있다 본 장에서는 치를
구하기 한 각 방법과 재 개발되어 있거나 연구 인 실내측 시스템
에 하여 간단히 소개한다
211 치 결정 방법
2111 삼각측량(Triangulation)
- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 6 -
삼각측량은 여러 기 으로부터 거리와 각도를 측정하여 치를 결정하
는 방식으로 여러 개의 기 들로부터 사용자까지의 거리를 측정하여
치를 계산한다 이때 2차원으로 물체의 치를 계산하려면 동일 직선상에
있지 않은 세 으로부터 거리를 측정해야하며 3차원으로 치를 계산하
려면 동일 직선상에 있지 않은 네 으로부터 거리를 측정해야한다 각도
측정방식은 거리측정방식과 유사하지만 물체의 치를 계산하는데 거리
신 각도를 사용한다 2차원 각도 측정을 해서는 두 개의 각도와 기
간 거리가 필요하며 3차원 각도 측정에서는 두 개의 각도와 기
간의 거리뿐만 아니라 방 각도 필요하다[1] 삼각측량을 이용하여 측 하
는 방법은 GPS와 이동통신망을 이용한 측 에 용되고 있다
2112 장면 분석(Scene Analysis)
장면 분석 치인식 기술은 특정지 에서 측된 장면의 특성을 이용하
는 방법으로 정 장면 분석법과 차동 장면 분석법이 있다 정 장면 분
석법은 미리 정의된 자료 집합이 물체의 치와 매핑 되어 있어 측된
특성을 자료 집합에서 검색하여 사용자의 치를 찾는다 차동 장면 분석
법은 치를 측하기 해 연속 인 장면간의 차이를 추 하고 장면의
차이가 물체의 움직임에 해당한다 여기서 장면은 휴 용 카메라에 힌
임과 같은 가시 이미지나 물체가 특정 치나 방향에 있을 때 발생
하는 자기 특성과 같은 측정 가능한 물리 상 등으로 이루어진다
이 방법을 이용한 측 시스템의 한 로 마이크로소 트사에서 개발한
RADAR 시스템이 있다 이 시스템은 건물 내의 여러 치와 방향에서
송되는 무선 신호를 찰함으로써 얻어진 신호세기 측정치를 사용한다[1]
2113 근 방식(Proximity)
물체가 알려진 치 근처에 있을 때 치를 인식하는 기술로서 외선
음 RFID UWB등을 이용한 측 에 사용되며 일반 으로 세 가지 방
식이 있다 첫째 물리 감지에 의한 치 인식은 가장 기본 인 방
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
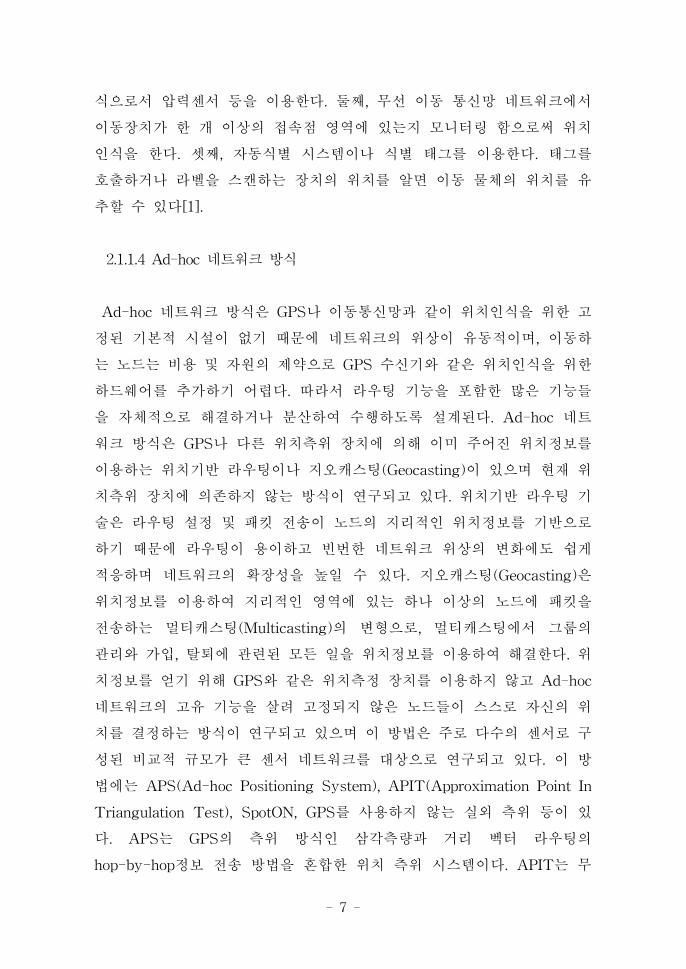
- 7 -
식으로서 압력센서 등을 이용한다 둘째 무선 이동 통신망 네트워크에서
이동장치가 한 개 이상의 속 역에 있는지 모니터링 함으로써 치
인식을 한다 셋째 자동식별 시스템이나 식별 태그를 이용한다 태그를
호출하거나 라벨을 스캔하는 장치의 치를 알면 이동 물체의 치를 유
추할 수 있다[1]
2114 Ad-hoc 네트워크 방식
Ad-hoc 네트워크 방식은 GPS나 이동통신망과 같이 치인식을 한 고
정된 기본 시설이 없기 때문에 네트워크의 상이 유동 이며 이동하
는 노드는 비용 자원의 제약으로 GPS 수신기와 같은 치인식을 한
하드웨어를 추가하기 어렵다 따라서 라우 기능을 포함한 많은 기능들
을 자체 으로 해결하거나 분산하여 수행하도록 설계된다 Ad-hoc 네트
워크 방식은 GPS나 다른 치측 장치에 의해 이미 주어진 치정보를
이용하는 치기반 라우 이나 지오캐스 (Geocasting)이 있으며 재
치측 장치에 의존하지 않는 방식이 연구되고 있다 치기반 라우 기
술은 라우 설정 패킷 송이 노드의 지리 인 치정보를 기반으로
하기 때문에 라우 이 용이하고 빈번한 네트워크 상의 변화에도 쉽게
응하며 네트워크의 확장성을 높일 수 있다 지오캐스 (Geocasting)은
치정보를 이용하여 지리 인 역에 있는 하나 이상의 노드에 패킷을
송하는 멀티캐스 (Multicasting)의 변형으로 멀티캐스 에서 그룹의
리와 가입 탈퇴에 련된 모든 일을 치정보를 이용하여 해결한다
치정보를 얻기 해 GPS와 같은 치측정 장치를 이용하지 않고 Ad-hoc
네트워크의 고유 기능을 살려 고정되지 않은 노드들이 스스로 자신의
치를 결정하는 방식이 연구되고 있으며 이 방법은 주로 다수의 센서로 구
성된 비교 규모가 큰 센서 네트워크를 상으로 연구되고 있다 이 방
법에는 APS(Ad-hoc Positioning System) APIT(Approximation Point In
Triangulation Test) SpotON GPS를 사용하지 않는 실외 측 등이 있
다 APS는 GPS의 측 방식인 삼각측량과 거리 벡터 라우 의
hop-by-hop정보 송 방법을 혼합한 치 측 시스템이다 APIT는 무
- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 8 -
선 센서 네트워크에서의 지역 기반 치 측 알고리즘으로서 다수의 센
서 노드 에 극히 일부라도 고출력 송신기를 가지고 GPS 는 다른
치 결정 수단에 의해 치 정보를 알고 있는 고정된 기 노드를 찾는다
그리고 이들 기 노드가 송신하는 비콘 신호를 기 으로 한 개의 노드는
자신이 인식하는 여러 개의 기 노드들 에 세 개의 기 노드를 선택
하여 이들 세 개의 노드가 연결하여 형성되는 삼각형 역의 내부에 자신
이 존재하는지를 검사하여 치를 결정한다 SpotON은 미국
DRAPA(Defense Advanced Research Projects Agency)의 지원 하에 개
발된 것으로 다수의 센서로 구성된 Ad-hoc 네트워크에서 무선 신호의 신
호세기 값을 측정하여 신호 감쇄로 센서간의 거리를 측하는 방법이다
GPS를 사용하지 않는 실외 측 방법은 실외 환경에서 RF 신호의 수신
강도와 연결성을 기반으로 치를 결정한다
212 측 시스템
측 시스템에는 이동통신망 외선 음 RFID UWB 무선 네트워
크를 이용한 것들이 있다
2121 이동통신망을 이용한 측
이동통신 망을 이용한 측 는 기본 으로 항법 기술을 이용하며
항법 기술은 신호세기를 이용한 방법 신호의 도래각을 이용한
AOA(Angle of Arrival) 의 달 시간을 이용한 TOA(Time of
Arrival) 두 개의 기지국으로부터 도달 시각의 상 인 차를 이용
한 TDOA(Time Difference of Arrival)가 있다
우선 신호의 세기를 이용한 방법은 거리에 따른 경로손실을 고려한
모델을 이용하여 기지국 내의 단말기의 치를 알아내는 방법이다 이 방
법을 이용하여 단말기의 치를 측정하면 기지국을 심으로 하는 원의
내부 안에 단말기가 존재하게 되고 여러 개의 기지국에서 신호의 세기를
측정한다면 단말기의 치를 추정할 수 있다 AOA 방식은 사용자의
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
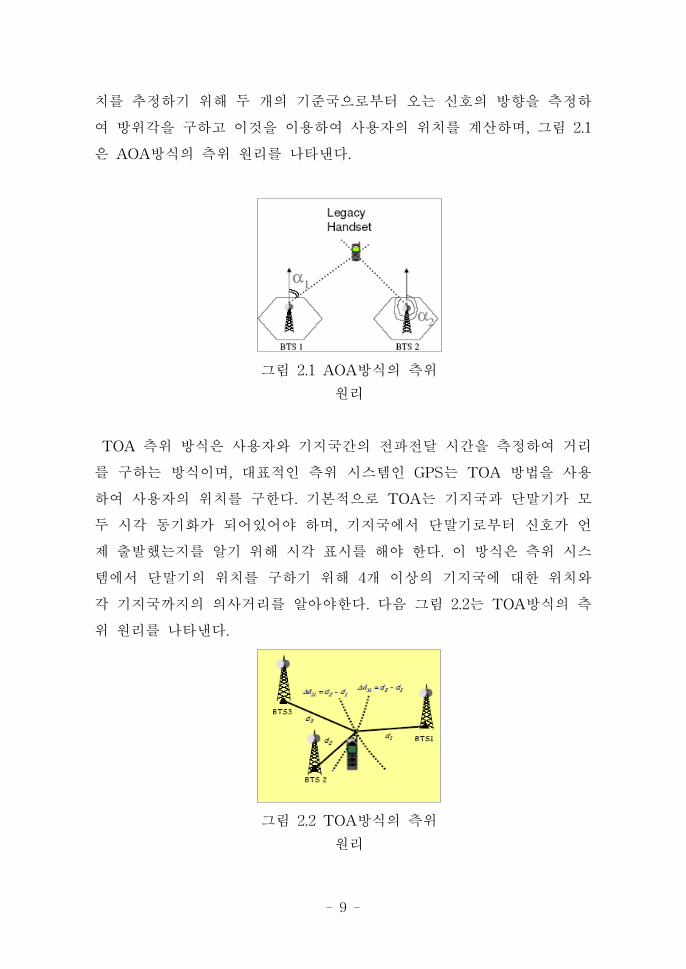
- 9 -
치를 추정하기 해 두 개의 기 국으로부터 오는 신호의 방향을 측정하
여 방 각을 구하고 이것을 이용하여 사용자의 치를 계산하며 그림 21
은 AOA방식의 측 원리를 나타낸다
그림 21 AOA방식의 측
원리
TOA 측 방식은 사용자와 기지국간의 달 시간을 측정하여 거리
를 구하는 방식이며 표 인 측 시스템인 GPS는 TOA 방법을 사용
하여 사용자의 치를 구한다 기본 으로 TOA는 기지국과 단말기가 모
두 시각 동기화가 되어있어야 하며 기지국에서 단말기로부터 신호가 언
제 출발했는지를 알기 해 시각 표시를 해야 한다 이 방식은 측 시스
템에서 단말기의 치를 구하기 해 4개 이상의 기지국에 한 치와
각 기지국까지의 의사거리를 알아야한다 다음 그림 22는 TOA방식의 측
원리를 나타낸다
그림 22 TOA방식의 측
원리
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
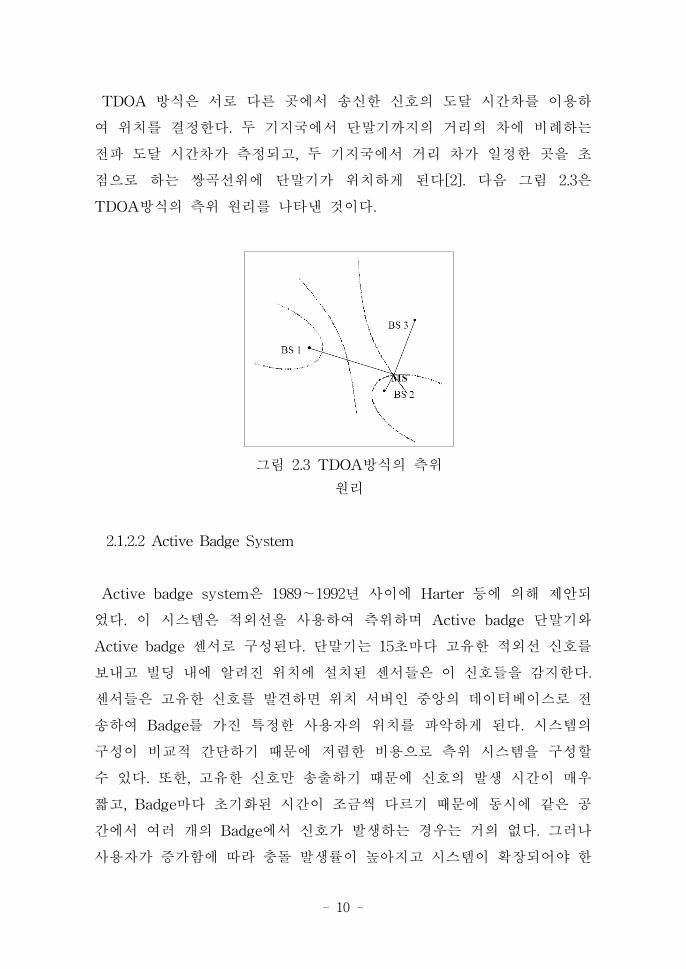
- 10 -
TDOA 방식은 서로 다른 곳에서 송신한 신호의 도달 시간차를 이용하
여 치를 결정한다 두 기지국에서 단말기까지의 거리의 차에 비례하는
도달 시간차가 측정되고 두 기지국에서 거리 차가 일정한 곳을
으로 하는 곡선 에 단말기가 치하게 된다[2] 다음 그림 23은
TDOA방식의 측 원리를 나타낸 것이다
그림 23 TDOA방식의 측
원리
2122 Active Badge System
Active badge system은 1989~1992년 사이에 Harter 등에 의해 제안되
었다 이 시스템은 외선을 사용하여 측 하며 Active badge 단말기와
Active badge 센서로 구성된다 단말기는 15 마다 고유한 외선 신호를
보내고 빌딩 내에 알려진 치에 설치된 센서들은 이 신호들을 감지한다
센서들은 고유한 신호를 발견하면 치 서버인 앙의 데이터베이스로
송하여 Badge를 가진 특정한 사용자의 치를 악하게 된다 시스템의
구성이 비교 간단하기 때문에 렴한 비용으로 측 시스템을 구성할
수 있다 한 고유한 신호만 송출하기 때문에 신호의 발생 시간이 매우
짧고 Badge마다 기화된 시간이 조 씩 다르기 때문에 동시에 같은 공
간에서 여러 개의 Badge에서 신호가 발생하는 경우는 거의 없다 그러나
사용자가 증가함에 따라 충돌 발생률이 높아지고 시스템이 확장되어야 한
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
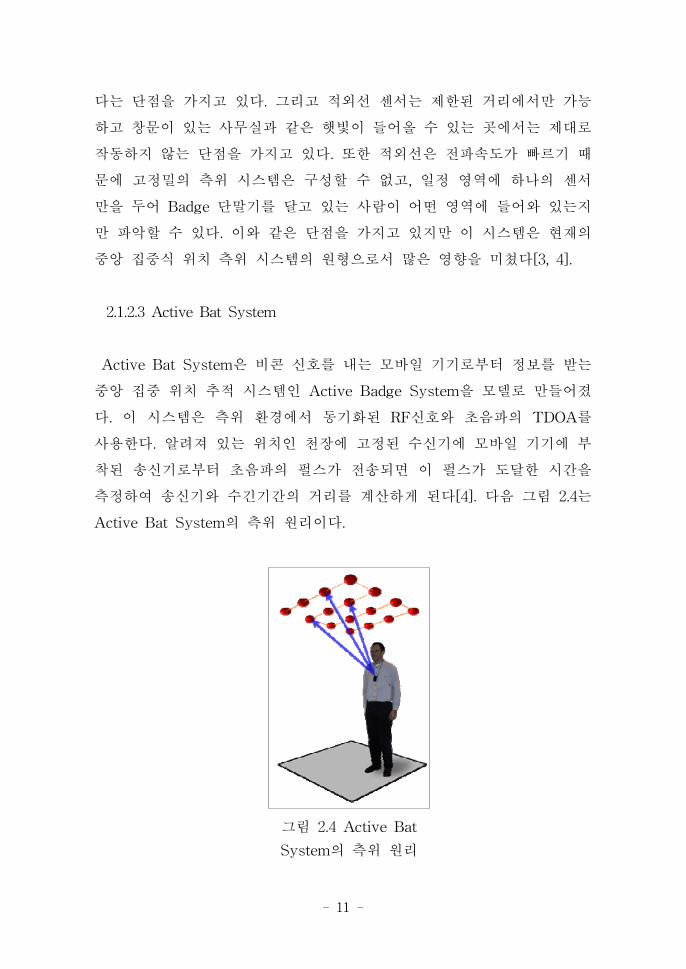
- 11 -
다는 단 을 가지고 있다 그리고 외선 센서는 제한된 거리에서만 가능
하고 창문이 있는 사무실과 같은 햇빛이 들어올 수 있는 곳에서는 제 로
작동하지 않는 단 을 가지고 있다 한 외선은 속도가 빠르기 때
문에 고정 의 측 시스템은 구성할 수 없고 일정 역에 하나의 센서
만을 두어 Badge 단말기를 달고 있는 사람이 어떤 역에 들어와 있는지
만 악할 수 있다 이와 같은 단 을 가지고 있지만 이 시스템은 재의
앙 집 식 치 측 시스템의 원형으로서 많은 향을 미쳤다[3 4]
2123 Active Bat System
Active Bat System은 비콘 신호를 내는 모바일 기기로부터 정보를 받는
앙 집 치 추 시스템인 Active Badge System을 모델로 만들어졌
다 이 시스템은 측 환경에서 동기화된 RF신호와 음 의 TDOA를
사용한다 알려져 있는 치인 천장에 고정된 수신기에 모바일 기기에 부
착된 송신기로부터 음 의 펄스가 송되면 이 펄스가 도달한 시간을
측정하여 송신기와 수긴기간의 거리를 계산하게 된다[4] 다음 그림 24는
Active Bat System의 측 원리이다
그림 24 Active Bat
System의 측 원리
- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 12 -
이때 좌표의 계산은 비선형 최소 제곱법 문제를 선형으로 변형시키기
해 테일러 시리즈를 사용한 Multilateration을 사용한다 Multilateration은
기본 으로 최소 3개의 비콘의 범 내에 존재하는 미지의 노드의 치를
추정한다 다음 그림 25는 Multilateration의 상을 나타낸 것이다[5]
그림 25 Multilateration의 [5]
이 시스템은 캠 리지 학(Cambridge University)의 Andy Ward 등에
의해 개발되었다 Ward 등은 측 실험을 해 280m2의 공간에 12m 간
격으로 수신기를 배치하 고 실험결과는 95 정확도에 해 9cm이하의
에러를 기록했다 이 시스템은 높은 정확도를 제공하지만 작은 공간에 비
해 많은 수신기가 필요하기 때문에 비용이 많이 든다는 단 이 있다[4]
2124 Criket System
Criket System은 MIT(Massachusetts Institute of Technology)의
Privantha 등에 의해 개발되었다 이 시스템은 Active Bat System처럼
음 를 이용하여 사용자의 치를 결정하며 핸드셋(Hand-set) 기반이
라는 에서 네트워크 기반인 Active Bat System과 다르다 치를 결정
하기 해 동기화된 RF와 음 의 TDOA를 사용한다 각 비콘은 자신
- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 13 -
이 유하고 있는 공간을 식별함으로써 일정하게 RF펄스를 방출하고 모
바일 기기는 수신 받은 각 비콘의 신호가 달된 거리를 계산한다[6 7]
2125 RADAR 시스템
RADAR 시스템은 마이크로소 트사의 Bahl 등에 의해 연구되었고
IEEE 80211 무선 네트워크를 측 에 이용하 다 이 시스템은
RF(Radio Frequency)기반 시스템으로 건물 내에서 사용자의 치를 측
하기 해 신호세기를 사용한다 Bahl 등은 본 시스템의 개발에서 신호
달 모델을 검증하 고 NNSS(Nearest Neighbor in Signal Space) 알고리
즘을 개발하 다 NNSS 알고리즘은 미리 결정된 치에서의 신호세기
자료 집합을 필요로 하며 모바일 기기로부터 측정된 신호세기와 자료 집
합에 장된 신호세기간의 유클리드 차를 최소화 시키는 곳을 사용자의
치로 결정한다[8]
RADAR 시스템은 필요한 기지국 수가 고 기존에 설치된 무선 네트워
크를 사용할 수 있다는 장 을 가지고 있다[8] 그리고 재 모바일 장치
와 환경의 속한 확산으로 많은 사람들이 노트북이나 PDA 등의 모바일
기기를 가지고 있기 때문에 측 시스템만 있다면 자신의 치를 측 할
수 있다
2126 RFID 태그를 이용한 방법
RFID 시스템은 크게 RFID 태그 리더 자료처리 시스템으로 구성된다
신체 사물 건물 등에 부착된 측정기 센서 RFID 태그는 리더의 호출에
의해 상체의 식별번호를 RFID리더로 송하며 이를 자료처리 시스템
에 보내 필요한 정보를 사용자가 이용할 수 있는 장치에 표시해 다[1
8]
RFID 태그는 마이크로칩 코일 안테나로 구성되며 배터리의 유무에 따
라 능동형과 수동형으로 구분된다 능동형 태그는 원을 자체에 내장하
고 있어 인식거리가 수 십 미터에 달한다는 장 이 있지만 수동형 태그
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
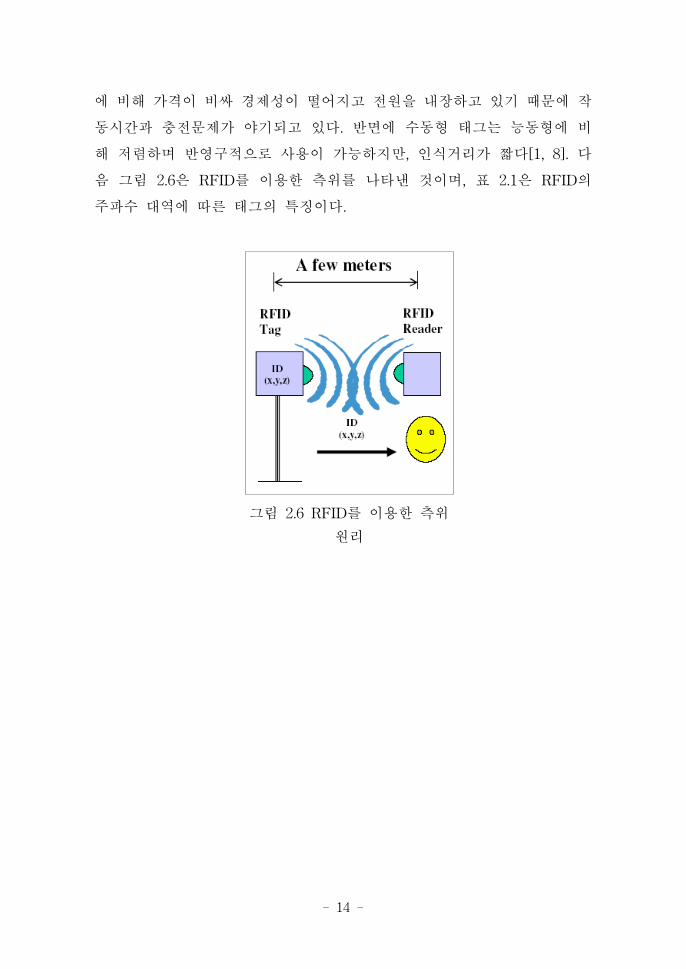
- 14 -
에 비해 가격이 비싸 경제성이 떨어지고 원을 내장하고 있기 때문에 작
동시간과 충 문제가 야기되고 있다 반면에 수동형 태그는 능동형에 비
해 렴하며 반 구 으로 사용이 가능하지만 인식거리가 짧다[1 8] 다
음 그림 26은 RFID를 이용한 측 를 나타낸 것이며 표 21은 RFID의
주 수 역에 따른 태그의 특징이다
그림 26 RFID를 이용한 측
원리
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
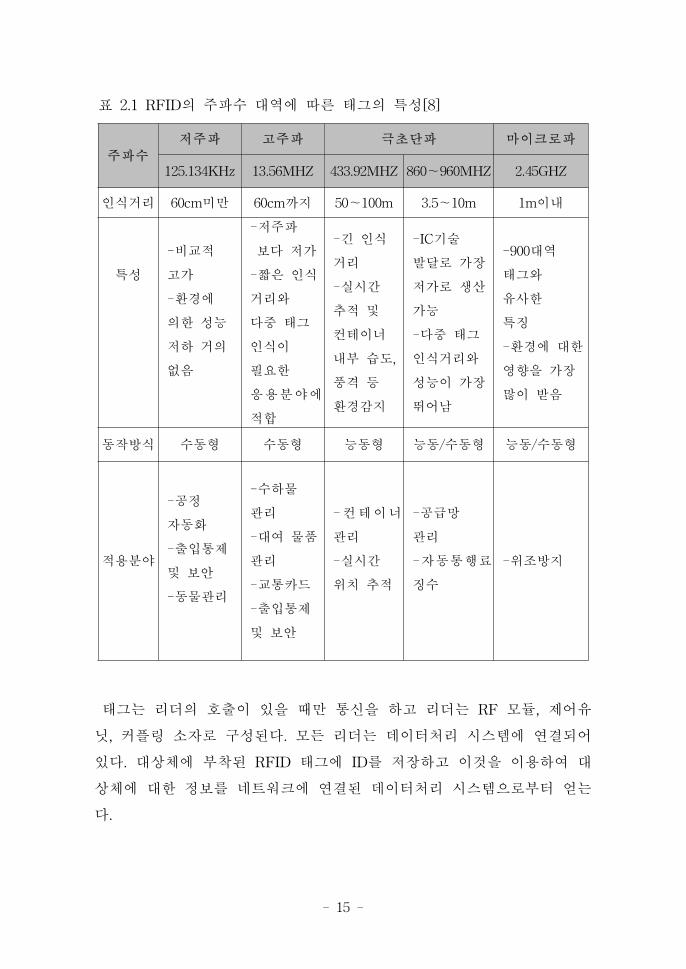
- 15 -
표 21 RFID의 주 수 역에 따른 태그의 특성[8]
주 수
주 고주 극 단 마이크로
125134KHz 1356MHZ 43392MHZ 860~960MHZ 245GHZ
인식거리 60cm미만 60cm까지 50~100m 35~10m 1m이내
특성
-비교
고가
-환경에
의한 성능
하 거의
없음
- 주
보다 가
-짧은 인식
거리와
다 태그
인식이
필요한
응용분야에
합
-긴 인식
거리
-실시간
추
컨테이
내부 습도
풍격 등
환경감지
-IC기술
발달로 가장
가로 생산
가능
-다 태그
인식거리와
성능이 가장
뛰어남
-900 역
태그와
유사한
특징
-환경에 한
향을 가장
많이 받음
동작방식 수동형 수동형 능동형 능동수동형 능동수동형
용분야
-공정
자동화
-출입통제
보안
-동물 리
-수하물
리
- 여 물품
리
-교통카드
-출입통제
보안
-컨테이
리
-실시간
치 추
-공 망
리
-자동통행료
징수
- 조방지
태그는 리더의 호출이 있을 때만 통신을 하고 리더는 RF 모듈 제어유
닛 커 링 소자로 구성된다 모든 리더는 데이터처리 시스템에 연결되어
있다 상체에 부착된 RFID 태그에 ID를 장하고 이것을 이용하여
상체에 한 정보를 네트워크에 연결된 데이터처리 시스템으로부터 얻는
다
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 16 -
2127 UWB를 사용한 측 시스템
UWB(Ultra-Wideband)는 미국에서 군사 인 목 으로 개발된 것으로
무선 반송 를 사용하지 않고 기 역에서 수 GHz이상의 매우 넓은 주
수 역을 사용하여 통신이나 이더 등에 응용되고 있는 새로운 무선
기술이다 특히 이 기술은 수 나노(Nano) 혹은 수 피코(Pico) 의 매우
좁은 펄스를 사용함으로써 기존의 무선 시스템의 잡음과 매우 낮은 스펙
트럼 력으로 기존의 이동통신 방송 성 등의 기존 통신 시스템과 상
호 간섭 향 없이 주 수를 공유하여 사용할 수 있으므로 주 수의 제약
없이 사용 가능한 시스템이다[1]
UWB는 처음에 군사 목 으로 사용하 지만 재 민간 목 으로
많은 분야에서 응용되고 있다 일반 인 응용분야로는 크게 이더 분야
와 통신 분야로 분류할 수 있다 이더 응용 분야는 민간 항공기의 충돌
방지 장치 고도계 지하 매설물이나 산물 추 을 한 GPR 건물 벽속
의 구조물을 찾기 한 Intrusion Detection Radar 실내에서의 치 측
시스템 등이 있다 그리고 일정 범 안으로 사람이 근하면 경보음을
울리는 보안 시스템도 리 응용되고 있다 통신 분야의 응용으로는 1~
2km의 휴 용 라디오와 Mobile ad-hoc network radio 등이 있으며 사무
실이나 가정과 같은 작은 공간에서 10m정도의 근거리에 있는 개인용 컴
퓨터와 주변기기 혹은 가 제품 등을 무선 인터페이스를 이용하여 연결하
는 근거리 개인 통신망 등에 응용하기 한 칩셋 개발도 활발히 진행되고
있다[1]
부분의 기존 무선기술들이 반송 변조 후 송되는 것과 달리 UWB
는 반송 를 사용하지 않으며 이미 유되어 사용되고 있는 주 수 역
을 공유하여 사용한다 그리고 주 수 천이(Conversion) 과정이 필요하지
않기 때문에 비교 렴한 비용으로 통신 시스템을 구 할 수 있을 것으
로 기 되고 있다 한 비교 은 력 소모를 통해 원하는 송 속도
송거리를 확보할 수 있는 장 을 가지고 있고 역(Narrow-band)
신호에 비해 벽과 같은 장애물 투과율이 좋고 다 경로 환경에 우수하다
는 장 이 있다 이와 같은 장 들로 재 UWB를 이용한 실내측 시스
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 17 -
템에 한 연구가 많이 진행 이다 그러나 UWB는 아직 표 화 되어
있지 않고 2007년에 표 화가 이루어질 정이다 한 2005년 이성호 등
의 실내 측 용 UWB 시스템 성능평가 실험에서 UWB의 신호는 사람이
나 은박지 등은 투과하지 못하는 것으로 나타났다[9]
22 무선 랜 네트워크를 이용한 실내측 알고리즘
무선 랜을 이용한 실내 측 는 무선 통신 신호의 달식과 삼각측량을
이용하여 계산할 수 있는 무선 신호 달 방법과 Euclidean 거리를 이용한
방법 확률 인 추론 방법으로 구분된다 후자의 두 방법은 신호세기 데이
터베이스를 작성하여 측 에 이용한다
Bahl 등은 RADAR 시스템에서 Euclidean 거리를 이용한 NNSS(Nearest
Neighbor in Signal Space)와 이 방법의 안으로 무선 신호 달 모델
을 제안하 다 이들의 연구는 무선 랜을 이용한 측 시스템에 많이 참
조되었고 이 실험을 토 로 많은 연구가 진행되었다
221 무선 신호 달 방법
실내 환경에서 무선 통신의 신호 달은 빌딩 내부의 구조에 의해 향을
받는다 송된 신호는 일반 으로 멀티패스를 거쳐 수신기에 도달한다
빌딩 내의 멀티패스는 빌딩의 구조에 많은 향을 받기 때문에 신호
달 방법을 수립할 때 건축재료 빌딩 내의 장애물의 형상과 수를 고려해
야한다 순수한 실내 환경의 경우 Seidel과 Rappaport는 큰 경로 손실과
벽의 감쇄에 의한 손실을 설명할 수 있는 FAF(Floor Attenuation Factor)
달 모델을 유도하 다[7] 이 달 모델은 경로 손실을 고려하여 기지국
과 모바일 기기 사이의 장애물 효과를 고려한 반면 층에 의한 감쇄효과는
무시했다 따라서 이 모델은 건물의 배치 형상에 상 없이 측 모델을
수립할 수 있는 장 이 있다 식 (1)은 벽에 의한 감쇄효과를 이용한 모델
이다
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 18 -
P d=p d 0-10nlog(dd 0)+WAF 식 (1)
여기서 n은 경로 손실률이며 d는 AP와 모바일 기기 사이의 거리 d0는
AP로부터의 기 거리이다 Pd는 거리 d에서의 신호세기이고 Pd0는 기
거리에서 AP의 신호세기로 단 는 -dBm이다 WAF는 벽의 감쇄효과이
다
Bahl 등은 RF기반 실내측 연구에서 벽의 효과를 무시하고 모바일 기
기와 AP 사이의 장애물의 효과를 고려하 다 Seidel and Rappaport에
의해 제안된 모델 식 (1)을 수정하여 무선 통신 달 모델을 세웠으며 식
은 다음과 같이 정의한다[7]
P d=P d 0 - 10nlog(dd 0) - nWtimesWAF nW lt CCtimesWAF nWgeC
식 (2)
여기서 WAF는 벽의 감쇄효과이고 경로 손실률 n과 함께 빌딩의 배치
건축 재료의 향을 받는다 C는 송기와 수신기 사이의 방해물의 수이
다
본 모델을 이용하여 측 를 하기 해서는 최소 3개의 AP가 필요하다
측 는 의 식 (2)와 삼각측량에 의해 계산한다
222 Euclidean 거리를 이용한 방법
Bahl 등은 무선 신호 달 모델뿐만 아니라 Euclidean 거리를 이용한 측
모델을 제안하 다 이 방법은 미리 정해진 치에서 신호세기를 측정
하여 신호세기 자료 집합을 만든다 신호세기 자료 집합을
S=( s 1s 2s n)으로 정의한다 알려져 있지 않은 치에서 찰한 신호
세기를 O=(o 1o n)으로 표 한다 이때 신호의 Euclidean 거리 식은 다
음과 같다[7]
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 19 -
s= (s 1-o 1)2++(s n-o n)
2 식 (3)
모바일 기기의 치는 의 거리식이 가장 최소가 되는 지 으로 결정된
다
223 확률추론을 이용한 방법
2231 Gaussian 확률 도함수를 이용한 방법
우선 미리 알려진 치에서 신호세기를 모아 치 평균 표 편차로 자
료 집합을 만든다 자료 집합 Si는 식 (4) 같이 정의한다
S i=(x iy is 1iσ 1is niσ ni) 식 (4)
이때 i는 미리 결정된 치를 나타내며 그 개수는 1le ilem이다 AP의
개수는 1le jle n이다 알려져 있지 않은 치 k에서 찰된 신호세기 집
합을 Ok라하고 식 (5)와 같이 정의한다[11 12]
Ok=(o 1o n) 식 (5)
AP로부터 들어오는 신호세기는 Gaussian 정규분포를 따른다고 가정한다
확률분포를 이용한 방법은 Gaussian 확률 도 함수를 이용하여 데이터
집합에 장된 신호세기의 평균 표 편차 그리고 알려져 있지 않은 치
에서 수신한 신호세기 사이의 확률 도를 계산한다 모든 치에 i에
하여 값을 구하고 그 가장 큰 값을 가지는 치를 모바일 장치의 치
로 결정한다[11 12] 를 들어 AP를 3개 사용할 경우 Gaussian 확률
도 값은 식 (6)으로 계산할 수 있다
Gaussian i1=12πσ i
exp(-1
2σ2 i(s i-o 1)
2) 식 (6)
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
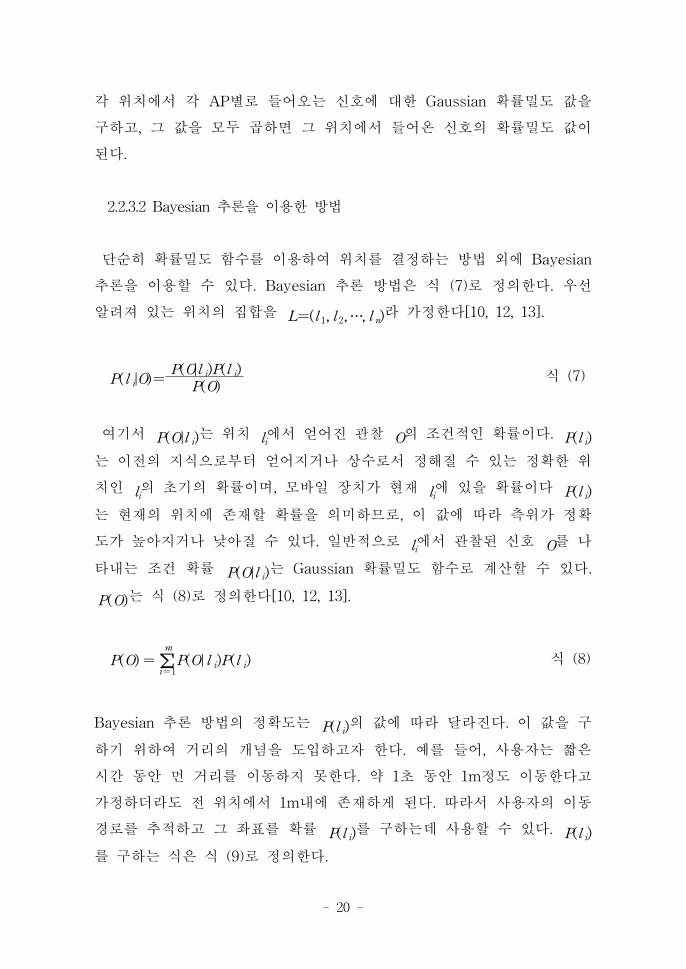
- 20 -
각 치에서 각 AP별로 들어오는 신호에 한 Gaussian 확률 도 값을
구하고 그 값을 모두 곱하면 그 치에서 들어온 신호의 확률 도 값이
된다
2232 Bayesian 추론을 이용한 방법
단순히 확률 도 함수를 이용하여 치를 결정하는 방법 외에 Bayesian
추론을 이용할 수 있다 Bayesian 추론 방법은 식 (7)로 정의한다 우선
알려져 있는 치의 집합을 L=(l 1l 2⋯l n)라 가정한다[10 12 13]
P(l i|O)=P(O|l i)P(l i)
P(O) 식 (7)
여기서 P(O|l i)는 치 li에서 얻어진 찰 O의 조건 인 확률이다 P(l i)
는 이 의 지식으로부터 얻어지거나 상수로서 정해질 수 있는 정확한
치인 li의 기의 확률이며 모바일 장치가 재 li에 있을 확률이다 P(l i)
는 재의 치에 존재할 확률을 의미하므로 이 값에 따라 측 가 정확
도가 높아지거나 낮아질 수 있다 일반 으로 li에서 찰된 신호 O를 나
타내는 조건 확률 P(O|l i)는 Gaussian 확률 도 함수로 계산할 수 있다
P(O)는 식 (8)로 정의한다[10 12 13]
P(O)=summ
i=1P(O| l i)P(l i) 식 (8)
Bayesian 추론 방법의 정확도는 P(l i)의 값에 따라 달라진다 이 값을 구
하기 하여 거리의 개념을 도입하고자 한다 를 들어 사용자는 짧은
시간 동안 먼 거리를 이동하지 못한다 약 1 동안 1m정도 이동한다고
가정하더라도 치에서 1m내에 존재하게 된다 따라서 사용자의 이동
경로를 추 하고 그 좌표를 확률 P(l i)를 구하는데 사용할 수 있다 P(l i)
를 구하는 식은 식 (9)로 정의한다
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
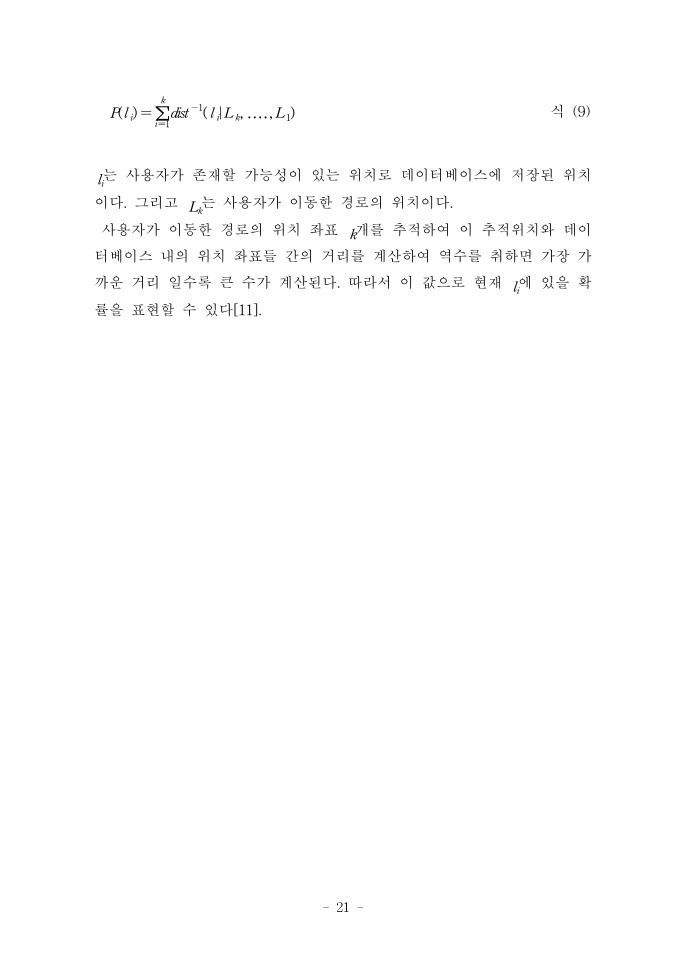
- 21 -
P(l i)=sumk
i=1dist
-1( l i|LkL 1) 식 (9)
li는 사용자가 존재할 가능성이 있는 치로 데이터베이스에 장된 치
이다 그리고 Lk는 사용자가 이동한 경로의 치이다
사용자가 이동한 경로의 치 좌표 k개를 추 하여 이 추 치와 데이
터베이스 내의 치 좌표들 간의 거리를 계산하여 역수를 취하면 가장 가
까운 거리 일수록 큰 수가 계산된다 따라서 이 값으로 재 li에 있을 확
률을 표 할 수 있다[11]
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
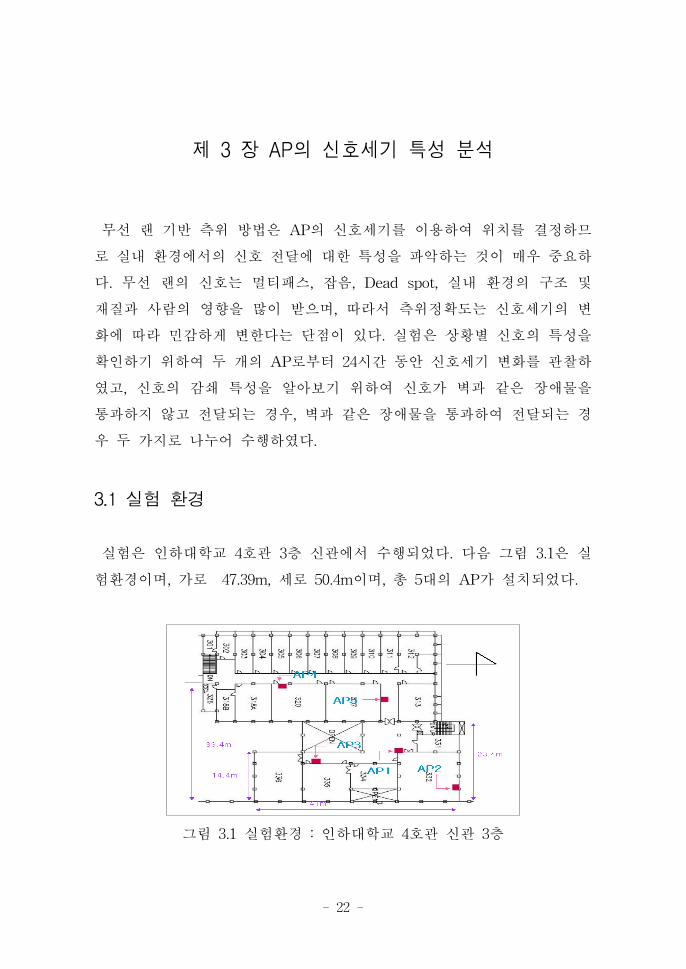
- 22 -
제 3 장 AP의 신호세기 특성 분석
무선 랜 기반 측 방법은 AP의 신호세기를 이용하여 치를 결정하므
로 실내 환경에서의 신호 달에 한 특성을 악하는 것이 매우 요하
다 무선 랜의 신호는 멀티패스 잡음 Dead spot 실내 환경의 구조
재질과 사람의 향을 많이 받으며 따라서 측 정확도는 신호세기의 변
화에 따라 민감하게 변한다는 단 이 있다 실험은 상황별 신호의 특성을
확인하기 하여 두 개의 AP로부터 24시간 동안 신호세기 변화를 찰하
고 신호의 감쇄 특성을 알아보기 하여 신호가 벽과 같은 장애물을
통과하지 않고 달되는 경우 벽과 같은 장애물을 통과하여 달되는 경
우 두 가지로 나 어 수행하 다
31 실험 환경
실험은 인하 학교 4호 3층 신 에서 수행되었다 다음 그림 31은 실
험환경이며 가로 4739m 세로 504m이며 총 5 의 AP가 설치되었다
그림 31 실험환경 인하 학교 4호 신 3층
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 23 -
실험에 사용된 장비는 Linksys WAP54G AP 5 와 모바일 기기로서
Linksys WPC54G 무선 랜 카드와 함께 Pentium Ⅲ 10G 노트북을
사용하 다 그림 32는 실험에 사용된 장비이다
그림 32 실험 장비
32 24시간 신호세기 분석
24시간 신호세기는 2005년 9월 14일 오후 5시 4분부터 9월 15일 오후 5
시 4분까지(24시간) 측정하 다 AP4와 5를 사용하 고 각각 강의실과
복도에 치하며 사람의 이동양 여러 자기기의 통신량 신호의 벽
통과 유무 등에 따라 선정되었다 그림 33과 34는 AP로부터 측정된 신
호의 특성을 그래 로 표 한 것이며 표 31은 24시간 신호세기 변화의
평균과 표 편차를 표로 나타낸 것이다
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
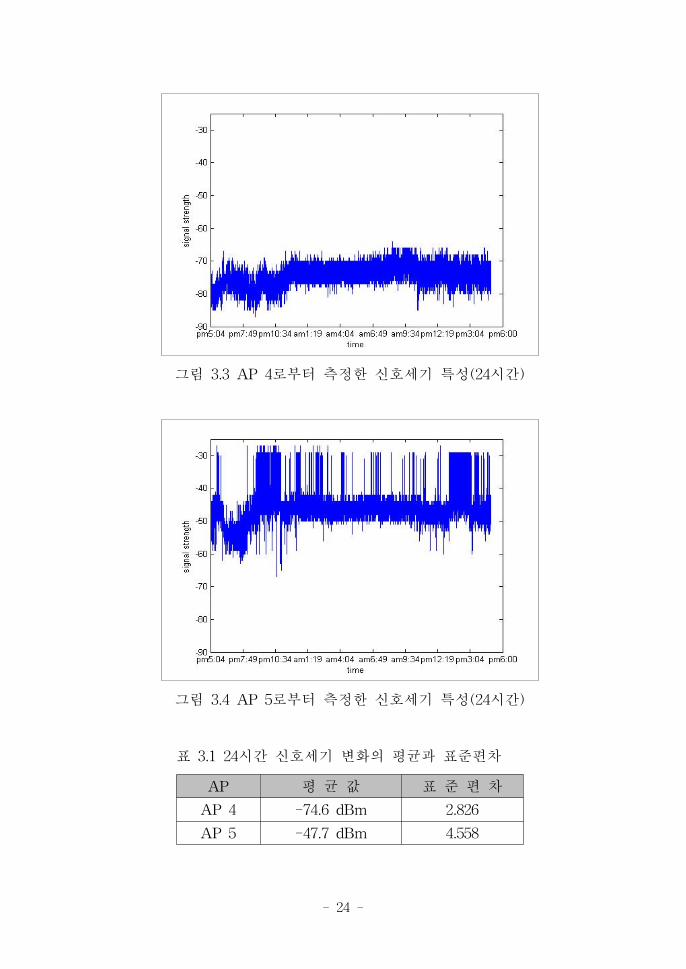
- 24 -
그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
표 31 24시간 신호세기 변화의 평균과 표 편차
AP 평 균 값 표 편 차
AP 4 -746 dBm 2826
AP 5 -477 dBm 4558
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
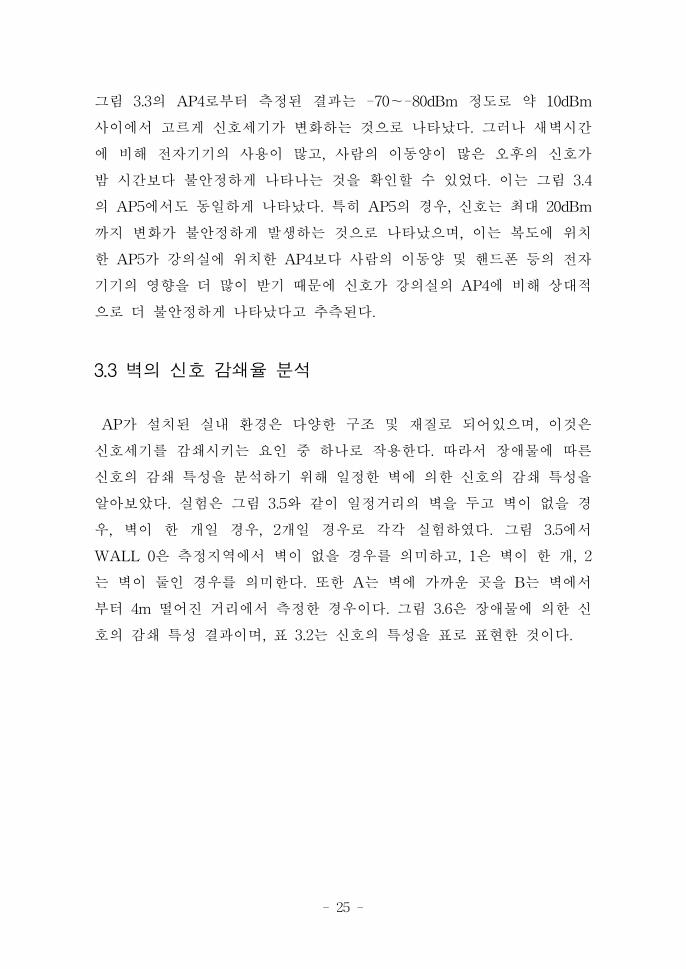
- 25 -
그림 33의 AP4로부터 측정된 결과는 -70~-80dBm 정도로 약 10dBm
사이에서 고르게 신호세기가 변화하는 것으로 나타났다 그러나 새벽시간
에 비해 자기기의 사용이 많고 사람의 이동양이 많은 오후의 신호가
밤 시간보다 불안정하게 나타나는 것을 확인할 수 있었다 이는 그림 34
의 AP5에서도 동일하게 나타났다 특히 AP5의 경우 신호는 최 20dBm
까지 변화가 불안정하게 발생하는 것으로 나타났으며 이는 복도에 치
한 AP5가 강의실에 치한 AP4보다 사람의 이동양 핸드폰 등의 자
기기의 향을 더 많이 받기 때문에 신호가 강의실의 AP4에 비해 상
으로 더 불안정하게 나타났다고 추측된다
33 벽의 신호 감쇄율 분석
AP가 설치된 실내 환경은 다양한 구조 재질로 되어있으며 이것은
신호세기를 감쇄시키는 요인 하나로 작용한다 따라서 장애물에 따른
신호의 감쇄 특성을 분석하기 해 일정한 벽에 의한 신호의 감쇄 특성을
알아보았다 실험은 그림 35와 같이 일정거리의 벽을 두고 벽이 없을 경
우 벽이 한 개일 경우 2개일 경우로 각각 실험하 다 그림 35에서
WALL 0은 측정지역에서 벽이 없을 경우를 의미하고 1은 벽이 한 개 2
는 벽이 둘인 경우를 의미한다 한 A는 벽에 가까운 곳을 B는 벽에서
부터 4m 떨어진 거리에서 측정한 경우이다 그림 36은 장애물에 의한 신
호의 감쇄 특성 결과이며 표 32는 신호의 특성을 표로 표 한 것이다
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
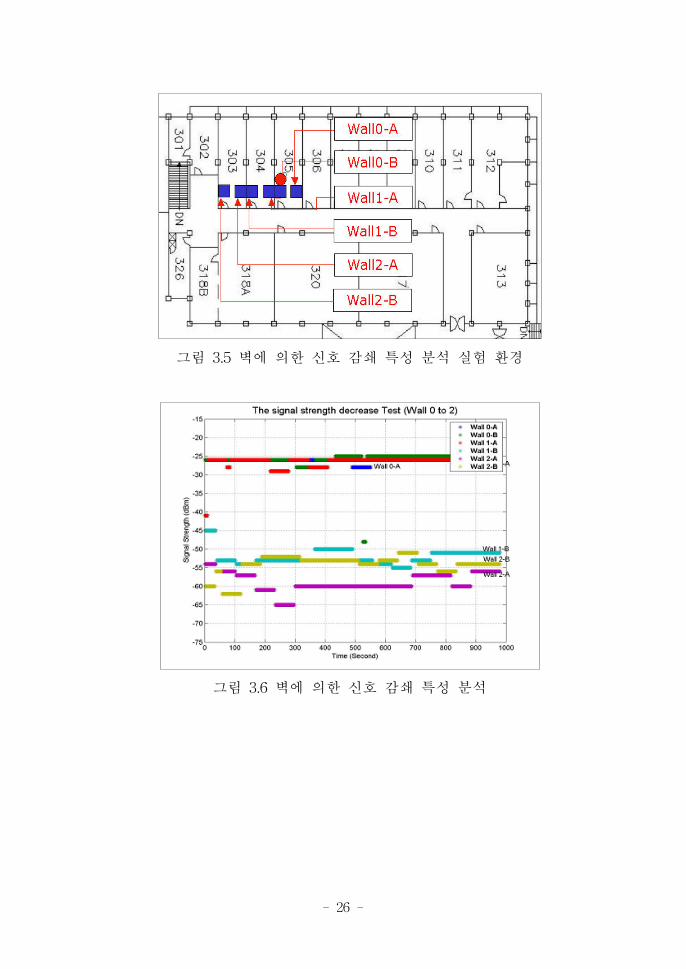
- 26 -
그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
그림 36 벽에 의한 신호 감쇄 특성 분석
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
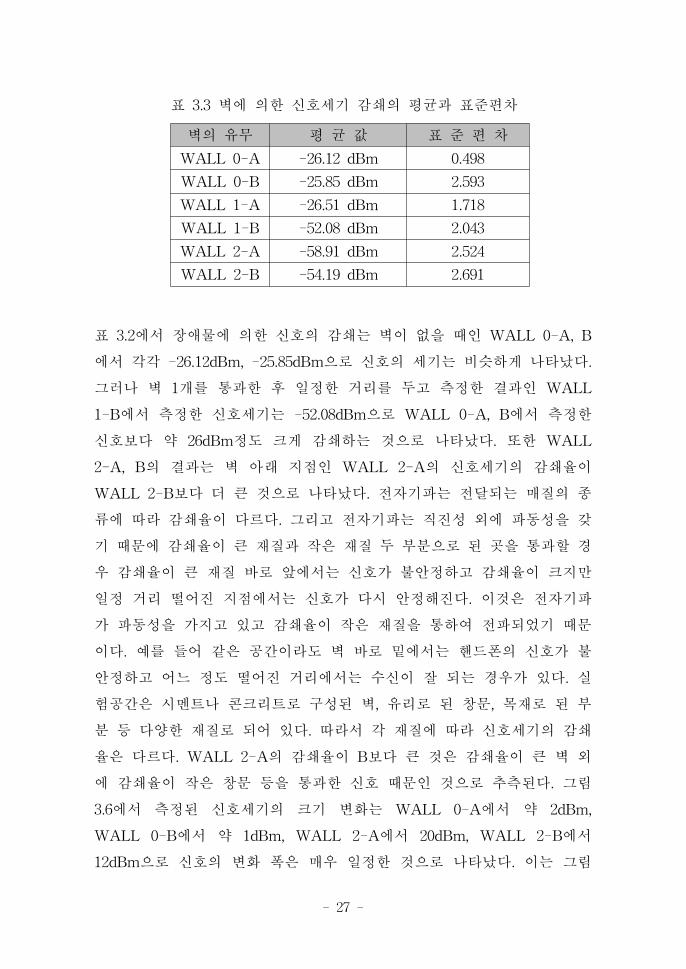
- 27 -
표 33 벽에 의한 신호세기 감쇄의 평균과 표 편차
벽의 유무 평 균 값 표 편 차
WALL 0-A -2612 dBm 0498
WALL 0-B -2585 dBm 2593
WALL 1-A -2651 dBm 1718
WALL 1-B -5208 dBm 2043
WALL 2-A -5891 dBm 2524
WALL 2-B -5419 dBm 2691
표 32에서 장애물에 의한 신호의 감쇄는 벽이 없을 때인 WALL 0-A B
에서 각각 -2612dBm -2585dBm으로 신호의 세기는 비슷하게 나타났다
그러나 벽 1개를 통과한 후 일정한 거리를 두고 측정한 결과인 WALL
1-B에서 측정한 신호세기는 -5208dBm으로 WALL 0-A B에서 측정한
신호보다 약 26dBm정도 크게 감쇄하는 것으로 나타났다 한 WALL
2-A B의 결과는 벽 아래 지 인 WALL 2-A의 신호세기의 감쇄율이
WALL 2-B보다 더 큰 것으로 나타났다 자기 는 달되는 매질의 종
류에 따라 감쇄율이 다르다 그리고 자기 는 직진성 외에 동성을 갖
기 때문에 감쇄율이 큰 재질과 작은 재질 두 부분으로 된 곳을 통과할 경
우 감쇄율이 큰 재질 바로 앞에서는 신호가 불안정하고 감쇄율이 크지만
일정 거리 떨어진 지 에서는 신호가 다시 안정해진다 이것은 자기
가 동성을 가지고 있고 감쇄율이 작은 재질을 통하여 되었기 때문
이다 를 들어 같은 공간이라도 벽 바로 에서는 핸드폰의 신호가 불
안정하고 어느 정도 떨어진 거리에서는 수신이 잘 되는 경우가 있다 실
험공간은 시멘트나 콘크리트로 구성된 벽 유리로 된 창문 목재로 된 부
분 등 다양한 재질로 되어 있다 따라서 각 재질에 따라 신호세기의 감쇄
율은 다르다 WALL 2-A의 감쇄율이 B보다 큰 것은 감쇄율이 큰 벽 외
에 감쇄율이 작은 창문 등을 통과한 신호 때문인 것으로 추측된다 그림
36에서 측정된 신호세기의 크기 변화는 WALL 0-A에서 약 2dBm
WALL 0-B에서 약 1dBm WALL 2-A에서 20dBm WALL 2-B에서
12dBm으로 신호의 변화 폭은 매우 일정한 것으로 나타났다 이는 그림
- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 28 -
33과 34의 신호세기 특성의 결과와 비교할 때 신호의 불안정성은 장애물
에 의한 감쇄율보다 사람과 자 등의 향을 더 크게 받는 것으로 추
측할 수 있다
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
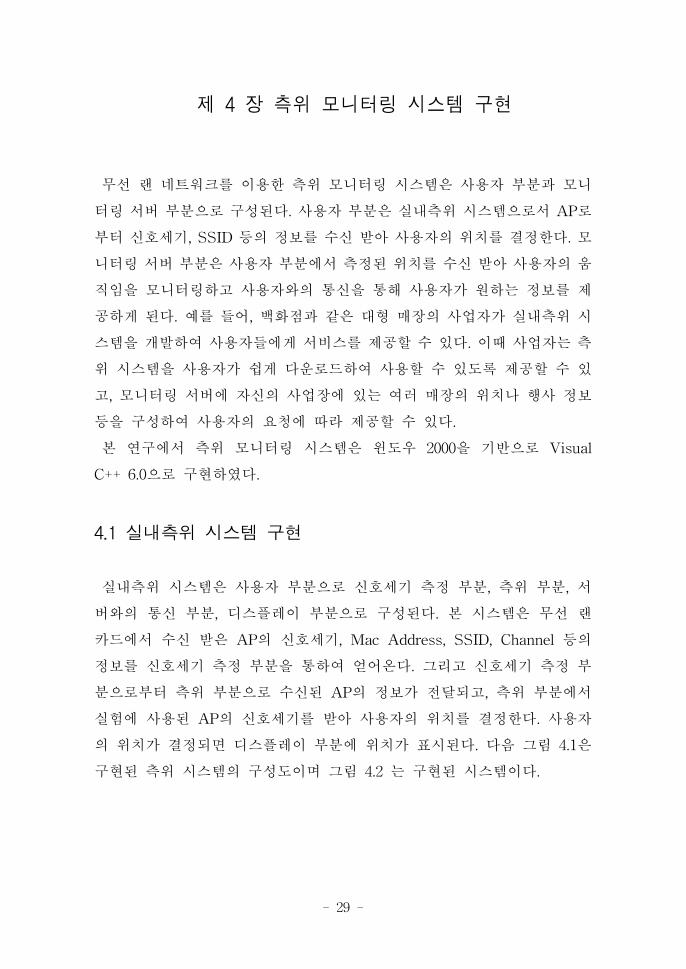
- 29 -
제 4 장 측 모니터링 시스템 구
무선 랜 네트워크를 이용한 측 모니터링 시스템은 사용자 부분과 모니
터링 서버 부분으로 구성된다 사용자 부분은 실내측 시스템으로서 AP로
부터 신호세기 SSID 등의 정보를 수신 받아 사용자의 치를 결정한다 모
니터링 서버 부분은 사용자 부분에서 측정된 치를 수신 받아 사용자의 움
직임을 모니터링하고 사용자와의 통신을 통해 사용자가 원하는 정보를 제
공하게 된다 를 들어 백화 과 같은 형 매장의 사업자가 실내측 시
스템을 개발하여 사용자들에게 서비스를 제공할 수 있다 이때 사업자는 측
시스템을 사용자가 쉽게 다운로드하여 사용할 수 있도록 제공할 수 있
고 모니터링 서버에 자신의 사업장에 있는 여러 매장의 치나 행사 정보
등을 구성하여 사용자의 요청에 따라 제공할 수 있다
본 연구에서 측 모니터링 시스템은 도우 2000을 기반으로 Visual
C++ 60으로 구 하 다
41 실내측 시스템 구
실내측 시스템은 사용자 부분으로 신호세기 측정 부분 측 부분 서
버와의 통신 부분 디스 이 부분으로 구성된다 본 시스템은 무선 랜
카드에서 수신 받은 AP의 신호세기 Mac Address SSID Channel 등의
정보를 신호세기 측정 부분을 통하여 얻어온다 그리고 신호세기 측정 부
분으로부터 측 부분으로 수신된 AP의 정보가 달되고 측 부분에서
실험에 사용된 AP의 신호세기를 받아 사용자의 치를 결정한다 사용자
의 치가 결정되면 디스 이 부분에 치가 표시된다 다음 그림 41은
구 된 측 시스템의 구성도이며 그림 42 는 구 된 시스템이다
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
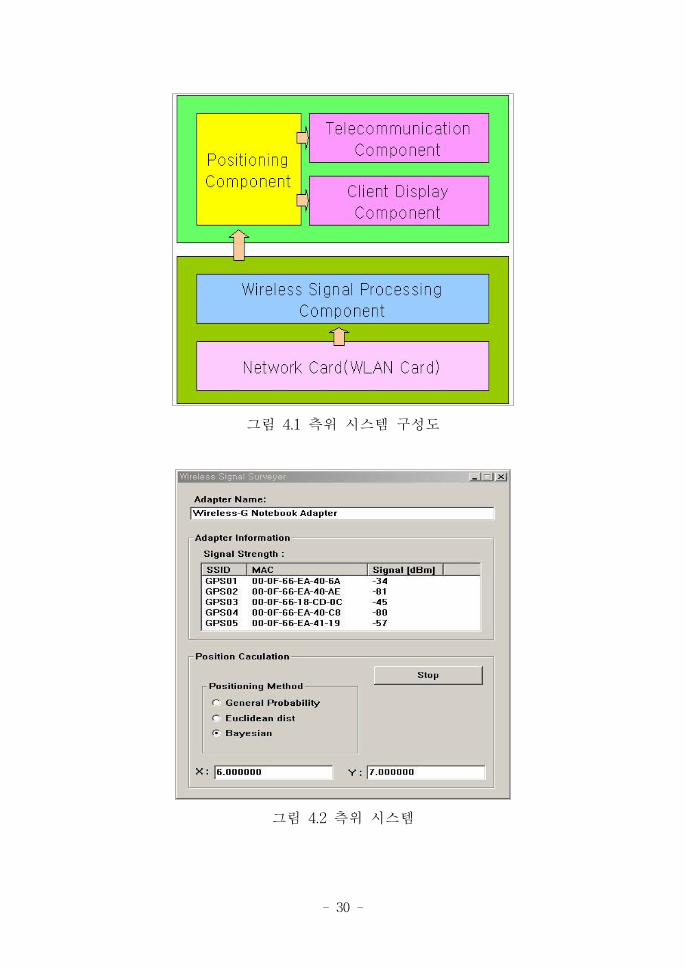
- 30 -
그림 41 측 시스템 구성도
그림 42 측 시스템
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
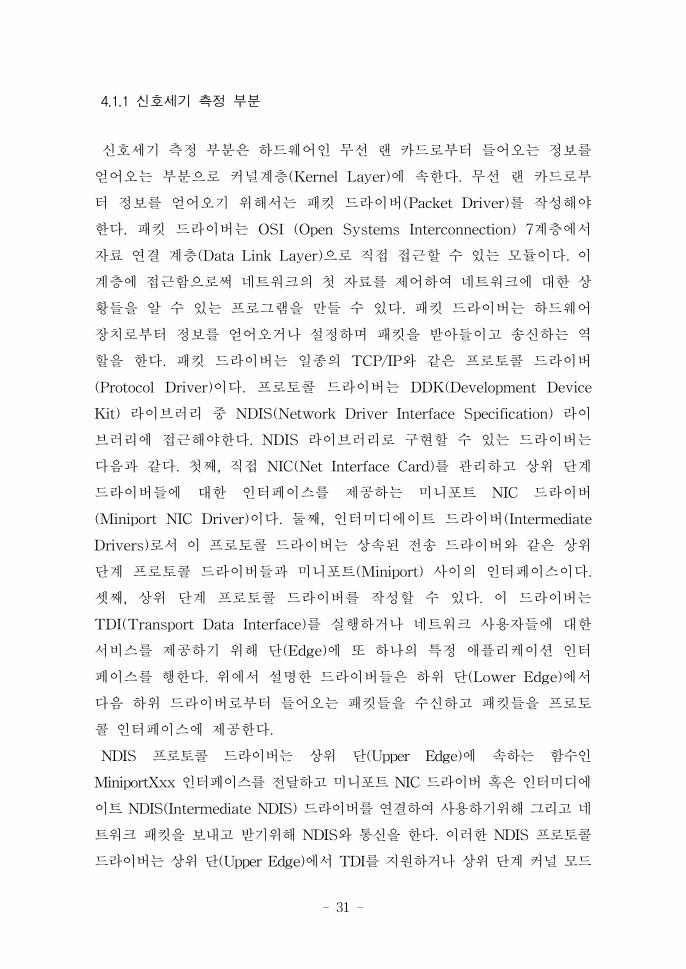
- 31 -
411 신호세기 측정 부분
신호세기 측정 부분은 하드웨어인 무선 랜 카드로부터 들어오는 정보를
얻어오는 부분으로 커 계층(Kernel Layer)에 속한다 무선 랜 카드로부
터 정보를 얻어오기 해서는 패킷 드라이버(Packet Driver)를 작성해야
한다 패킷 드라이버는 OSI (Open Systems Interconnection) 7계층에서
자료 연결 계층(Data Link Layer)으로 직 근할 수 있는 모듈이다 이
계층에 근함으로써 네트워크의 첫 자료를 제어하여 네트워크에 한 상
황들을 알 수 있는 로그램을 만들 수 있다 패킷 드라이버는 하드웨어
장치로부터 정보를 얻어오거나 설정하며 패킷을 받아들이고 송신하는 역
할을 한다 패킷 드라이버는 일종의 TCPIP와 같은 로토콜 드라이버
(Protocol Driver)이다 로토콜 드라이버는 DDK(Development Device
Kit) 라이 러리 NDIS(Network Driver Interface Specification) 라이
러리에 근해야한다 NDIS 라이 러리로 구 할 수 있는 드라이버는
다음과 같다 첫째 직 NIC(Net Interface Card)를 리하고 상 단계
드라이버들에 한 인터페이스를 제공하는 미니포트 NIC 드라이버
(Miniport NIC Driver)이다 둘째 인터미디에이트 드라이버(Intermediate
Drivers)로서 이 로토콜 드라이버는 상속된 송 드라이버와 같은 상
단계 로토콜 드라이버들과 미니포트(Miniport) 사이의 인터페이스이다
셋째 상 단계 로토콜 드라이버를 작성할 수 있다 이 드라이버는
TDI(Transport Data Interface)를 실행하거나 네트워크 사용자들에 한
서비스를 제공하기 해 단(Edge)에 하나의 특정 애 리 이션 인터
페이스를 행한다 에서 설명한 드라이버들은 하 단(Lower Edge)에서
다음 하 드라이버로부터 들어오는 패킷들을 수신하고 패킷들을 로토
콜 인터페이스에 제공한다
NDIS 로토콜 드라이버는 상 단(Upper Edge)에 속하는 함수인
MiniportXxx 인터페이스를 달하고 미니포트 NIC 드라이버 혹은 인터미디에
이트 NDIS(Intermediate NDIS) 드라이버를 연결하여 사용하기 해 그리고 네
트워크 패킷을 보내고 받기 해 NDIS와 통신을 한다 이러한 NDIS 로토콜
드라이버는 상 단(Upper Edge)에서 TDI를 지원하거나 상 단계 커 모드
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
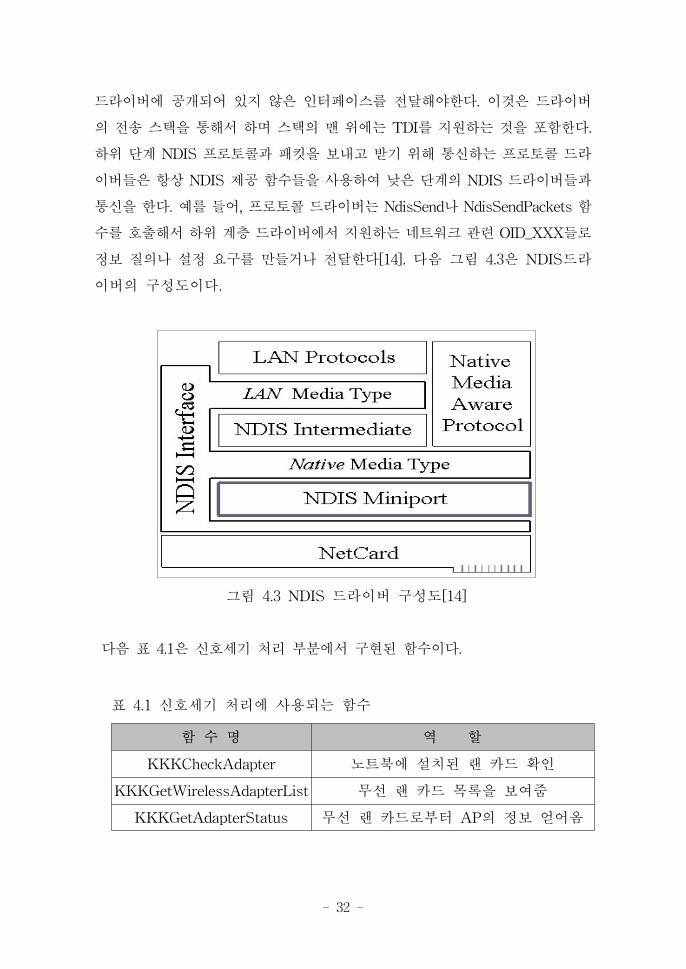
- 32 -
드라이버에 공개되어 있지 않은 인터페이스를 달해야한다 이것은 드라이버
의 송 스택을 통해서 하며 스택의 맨 에는 TDI를 지원하는 것을 포함한다
하 단계 NDIS 로토콜과 패킷을 보내고 받기 해 통신하는 로토콜 드라
이버들은 항상 NDIS 제공 함수들을 사용하여 낮은 단계의 NDIS 드라이버들과
통신을 한다 를 들어 로토콜 드라이버는 NdisSend나 NdisSendPackets 함
수를 호출해서 하 계층 드라이버에서 지원하는 네트워크 련 OID_XXX들로
정보 질의나 설정 요구를 만들거나 달한다[14] 다음 그림 43은 NDIS드라
이버의 구성도이다
그림 43 NDIS 드라이버 구성도[14]
다음 표 41은 신호세기 처리 부분에서 구 된 함수이다
표 41 신호세기 처리에 사용되는 함수
함 수 명 역 할
KKKCheckAdapter 노트북에 설치된 랜 카드 확인
KKKGetWirelessAdapterList 무선 랜 카드 목록을 보여
KKKGetAdapterStatus 무선 랜 카드로부터 AP의 정보 얻어옴
- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 33 -
412 측 부분
신호세기 처리 부분으로부터 신호세기 정보를 얻어온 후 측 부분에서
치를 결정한다 치결정에 사용된 알고리즘은 Euclidean 거리를 이용한
방법과 Bayesian 추론을 이용한 방법이다 측 부분은 쓰 드(Thread)를
작성하여 각 알고리즘을 실행한다 다음 표 42는 측 부분에서 구 된 함
수들이다
표 42 측 부분에서 작성된 함수
함 수 명 역 할
ThreadFunc 쓰 드 부분
ReceivedSignal신호세기 처리부분으로부터 본 실험에 사용된
AP의 신호세기를 선택하여 얻어옴
EuclideanFunc Euclidean 거리를 이용한 방법
BayesianFunc Bayesian 추론을 이용한 방법
GaussianFunc 가우시안 확률 도함수
413 서버와의 통신 부분
통신 부분은 측 부분에서 결정된 사용자의 치를 인터넷을 통해 모니
터링 서버로 달한다 인터넷의 기본 인 통신 로토콜인 TCPIP를 사용
하여 서버와 사용자는 정보를 주고받는다 통신 부분은 소켓을 통하여 통신
을 하게 되며 WinsockDLL 라이 러리를 사용하여 작성하 다 다음 표
43은 통신부분에서 사용된 함수이다
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
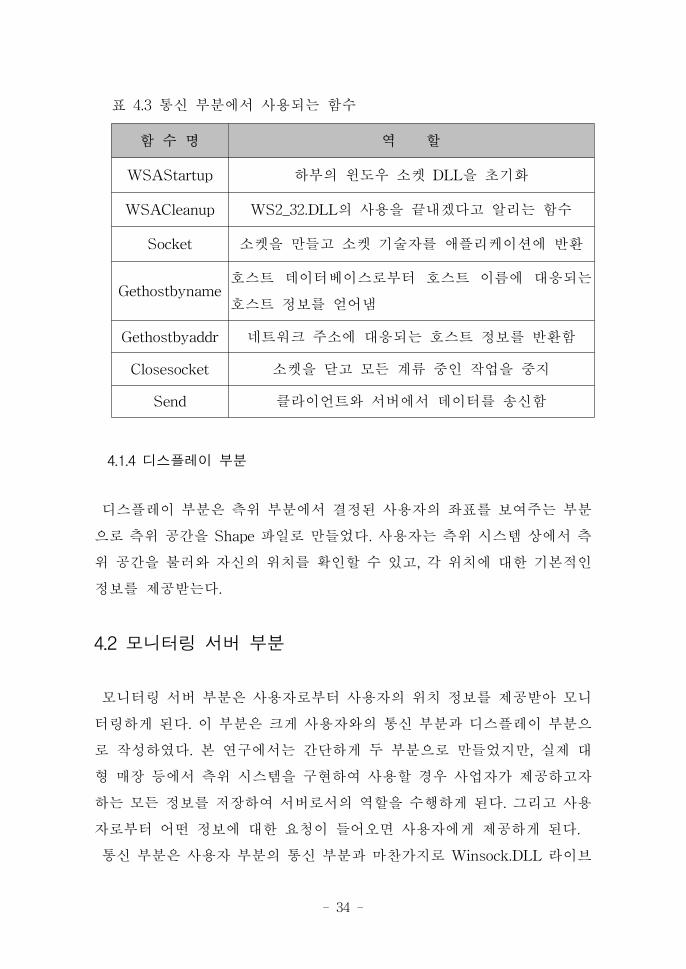
- 34 -
표 43 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSACleanup WS2_32DLL의 사용을 끝내겠다고 알리는 함수
Socket 소켓을 만들고 소켓 기술자를 애 리 이션에 반환
Gethostbyname호스트 데이터베이스로부터 호스트 이름에 응되는
호스트 정보를 얻어냄
Gethostbyaddr 네트워크 주소에 응되는 호스트 정보를 반환함
Closesocket 소켓을 닫고 모든 계류 인 작업을 지
Send 클라이언트와 서버에서 데이터를 송신함
414 디스 이 부분
디스 이 부분은 측 부분에서 결정된 사용자의 좌표를 보여주는 부분
으로 측 공간을 Shape 일로 만들었다 사용자는 측 시스템 상에서 측
공간을 불러와 자신의 치를 확인할 수 있고 각 치에 한 기본 인
정보를 제공받는다
42 모니터링 서버 부분
모니터링 서버 부분은 사용자로부터 사용자의 치 정보를 제공받아 모니
터링하게 된다 이 부분은 크게 사용자와의 통신 부분과 디스 이 부분으
로 작성하 다 본 연구에서는 간단하게 두 부분으로 만들었지만 실제
형 매장 등에서 측 시스템을 구 하여 사용할 경우 사업자가 제공하고자
하는 모든 정보를 장하여 서버로서의 역할을 수행하게 된다 그리고 사용
자로부터 어떤 정보에 한 요청이 들어오면 사용자에게 제공하게 된다
통신 부분은 사용자 부분의 통신 부분과 마찬가지로 WinsockDLL 라이
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
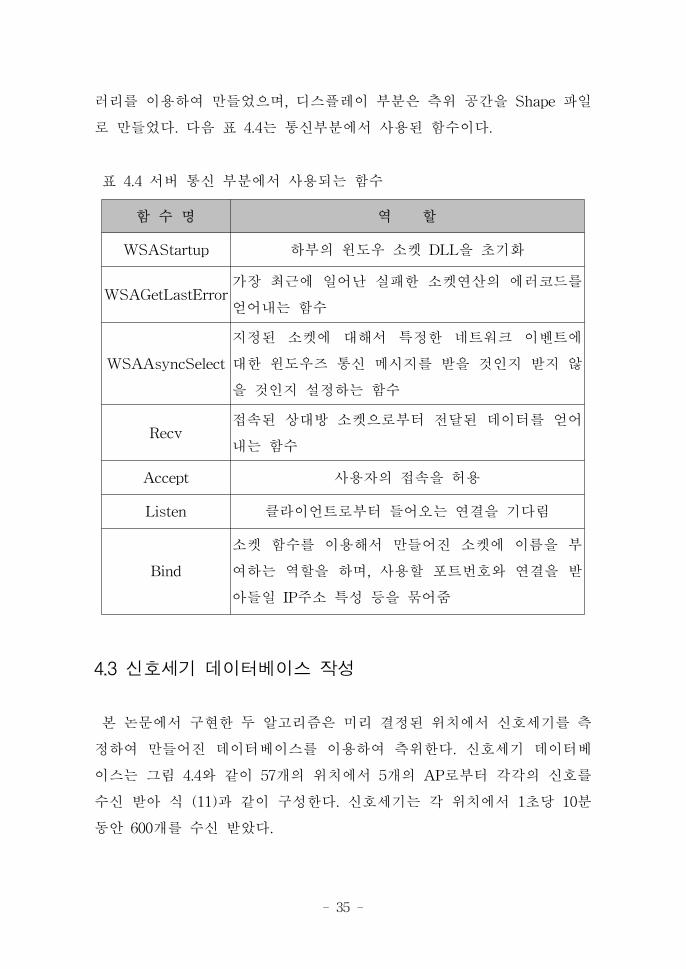
- 35 -
러리를 이용하여 만들었으며 디스 이 부분은 측 공간을 Shape 일
로 만들었다 다음 표 44는 통신부분에서 사용된 함수이다
표 44 서버 통신 부분에서 사용되는 함수
함 수 명 역 할
WSAStartup 하부의 도우 소켓 DLL을 기화
WSAGetLastError가장 최근에 일어난 실패한 소켓연산의 에러코드를
얻어내는 함수
WSAAsyncSelect
지정된 소켓에 해서 특정한 네트워크 이벤트에
한 도우즈 통신 메시지를 받을 것인지 받지 않
을 것인지 설정하는 함수
Recv속된 상 방 소켓으로부터 달된 데이터를 얻어
내는 함수
Accept 사용자의 속을 허용
Listen 클라이언트로부터 들어오는 연결을 기다림
Bind
소켓 함수를 이용해서 만들어진 소켓에 이름을 부
여하는 역할을 하며 사용할 포트번호와 연결을 받
아들일 IP주소 특성 등을 묶어
43 신호세기 데이터베이스 작성
본 논문에서 구 한 두 알고리즘은 미리 결정된 치에서 신호세기를 측
정하여 만들어진 데이터베이스를 이용하여 측 한다 신호세기 데이터베
이스는 그림 44와 같이 57개의 치에서 5개의 AP로부터 각각의 신호를
수신 받아 식 (11)과 같이 구성한다 신호세기는 각 치에서 1 당 10분
동안 600개를 수신 받았다
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
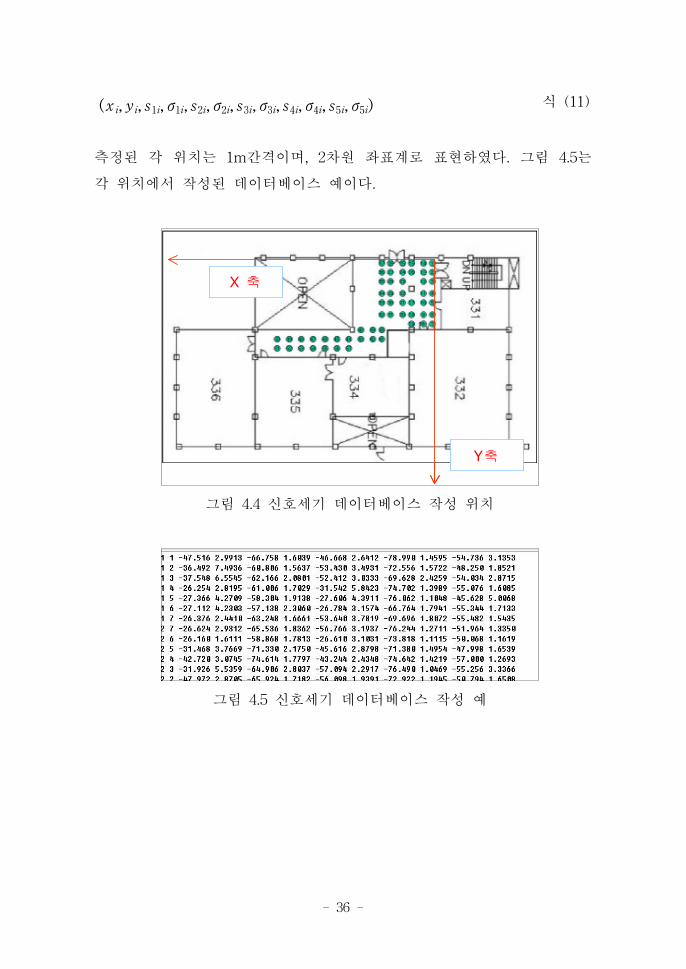
- 36 -
(x iy is 1iσ 1is 2iσ 2is 3iσ3is 4iσ 4is 5iσ 5i) 식 (11)
측정된 각 치는 1m간격이며 2차원 좌표계로 표 하 다 그림 45는
각 치에서 작성된 데이터베이스 이다
그림 44 신호세기 데이터베이스 작성 치
X 축
Y축
X 축
Y축
그림 45 신호세기 데이터베이스 작성
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 37 -
제 5 장 측 정확도 분석
51 알려진 치에서의 정확도 분석
Euclidean 거리를 이용한 방법과 Bayesian 추론 방법의 정확도 분석을
해 실험 환경에서 미리 결정되어 데이터베이스에 장된 치인 (2 2)
(2 4) (2 6) (4 2) (4 4) (4 6) (6 2) (6 6)에서 측 실험을 하 다
Bayesian 추론을 이용한 방법은 사용자의 추 좌표를 3 4 5개에 하여
수행하 다 구 된 알고리즘으로 추정된 사용자의 치 좌표는 각 치
에서 3분 동안 180개의 자료를 모았다 정확도 분석을 해 각 치에서
얻은 치 자료의 RMSE를 계산하 다 분석 결과를 설명하기 하여 각
방법을 Euclidean Bayesian 3 Bayesian 4 Bayesian 5라고 한다 다음
그림 51은 좌표 (4 4)의 정확도를 나타낸 것으로 실선은 2m내의 정확도
선은 3m내의 정확도를 의미한다
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
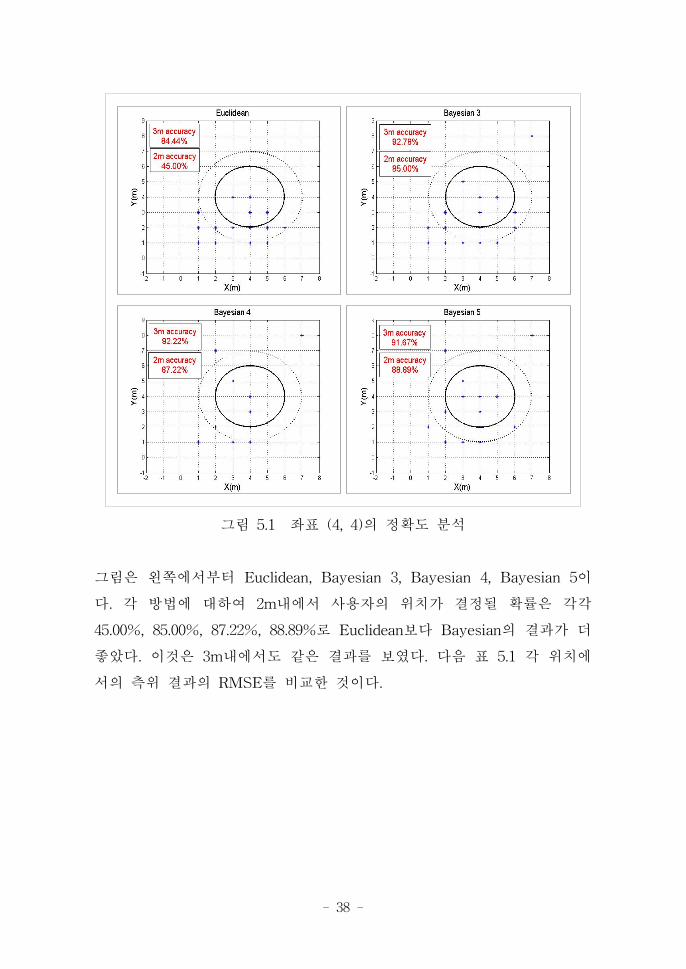
- 38 -
그림 51 좌표 (4 4)의 정확도 분석
그림은 왼쪽에서부터 Euclidean Bayesian 3 Bayesian 4 Bayesian 5이
다 각 방법에 하여 2m내에서 사용자의 치가 결정될 확률은 각각
4500 8500 8722 8889로 Euclidean보다 Bayesian의 결과가 더
좋았다 이것은 3m내에서도 같은 결과를 보 다 다음 표 51 각 치에
서의 측 결과의 RMSE를 비교한 것이다
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
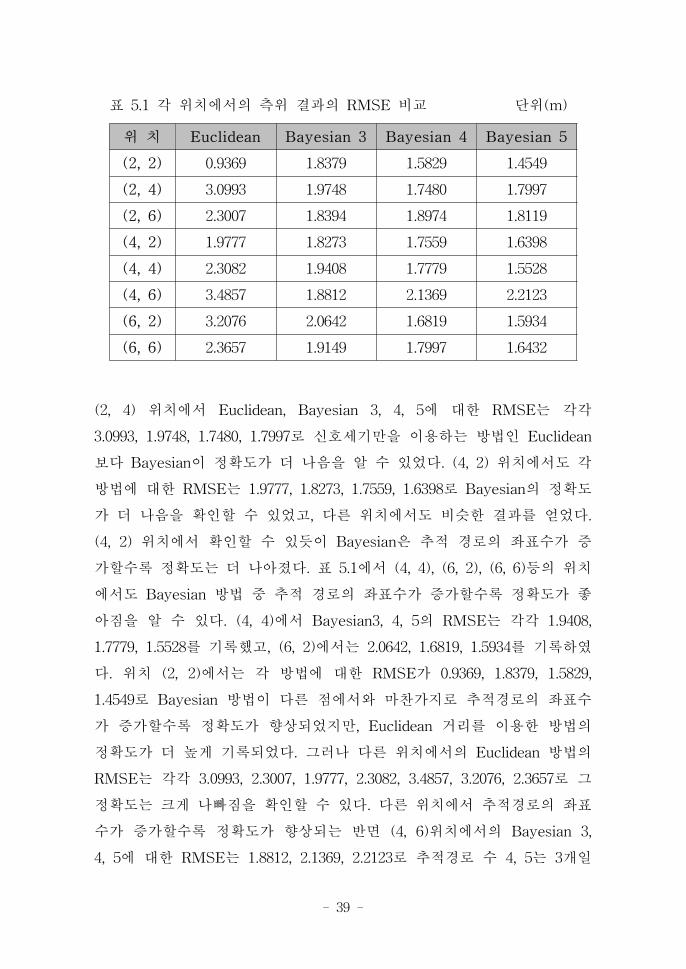
- 39 -
표 51 각 치에서의 측 결과의 RMSE 비교 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 09369 18379 15829 14549
(2 4) 30993 19748 17480 17997
(2 6) 23007 18394 18974 18119
(4 2) 19777 18273 17559 16398
(4 4) 23082 19408 17779 15528
(4 6) 34857 18812 21369 22123
(6 2) 32076 20642 16819 15934
(6 6) 23657 19149 17997 16432
(2 4) 치에서 Euclidean Bayesian 3 4 5에 한 RMSE는 각각
30993 19748 17480 17997로 신호세기만을 이용하는 방법인 Euclidean
보다 Bayesian이 정확도가 더 나음을 알 수 있었다 (4 2) 치에서도 각
방법에 한 RMSE는 19777 18273 17559 16398로 Bayesian의 정확도
가 더 나음을 확인할 수 있었고 다른 치에서도 비슷한 결과를 얻었다
(4 2) 치에서 확인할 수 있듯이 Bayesian은 추 경로의 좌표수가 증
가할수록 정확도는 더 나아졌다 표 51에서 (4 4) (6 2) (6 6)등의 치
에서도 Bayesian 방법 추 경로의 좌표수가 증가할수록 정확도가 좋
아짐을 알 수 있다 (4 4)에서 Bayesian3 4 5의 RMSE는 각각 19408
17779 15528를 기록했고 (6 2)에서는 20642 16819 15934를 기록하
다 치 (2 2)에서는 각 방법에 한 RMSE가 09369 18379 15829
14549로 Bayesian 방법이 다른 에서와 마찬가지로 추 경로의 좌표수
가 증가할수록 정확도가 향상되었지만 Euclidean 거리를 이용한 방법의
정확도가 더 높게 기록되었다 그러나 다른 치에서의 Euclidean 방법의
RMSE는 각각 30993 23007 19777 23082 34857 32076 23657로 그
정확도는 크게 나빠짐을 확인할 수 있다 다른 치에서 추 경로의 좌표
수가 증가할수록 정확도가 향상되는 반면 (4 6) 치에서의 Bayesian 3
4 5에 한 RMSE는 18812 21369 22123로 추 경로 수 4 5는 3개일
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
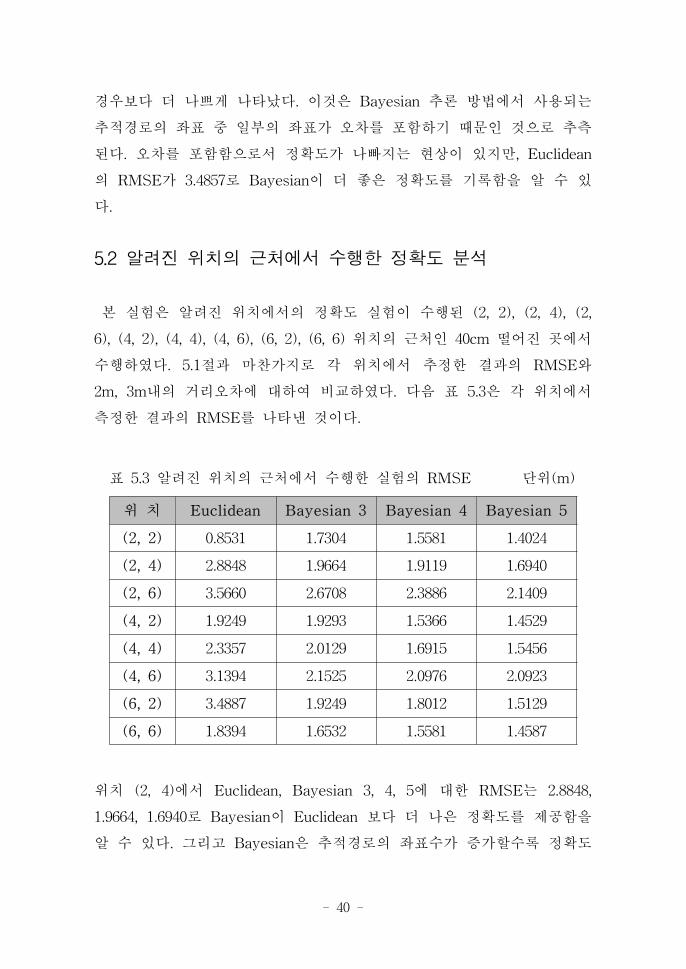
- 40 -
경우보다 더 나쁘게 나타났다 이것은 Bayesian 추론 방법에서 사용되는
추 경로의 좌표 일부의 좌표가 오차를 포함하기 때문인 것으로 추측
된다 오차를 포함함으로서 정확도가 나빠지는 상이 있지만 Euclidean
의 RMSE가 34857로 Bayesian이 더 좋은 정확도를 기록함을 알 수 있
다
52 알려진 치의 근처에서 수행한 정확도 분석
본 실험은 알려진 치에서의 정확도 실험이 수행된 (2 2) (2 4) (2
6) (4 2) (4 4) (4 6) (6 2) (6 6) 치의 근처인 40cm 떨어진 곳에서
수행하 다 51 과 마찬가지로 각 치에서 추정한 결과의 RMSE와
2m 3m내의 거리오차에 하여 비교하 다 다음 표 53은 각 치에서
측정한 결과의 RMSE를 나타낸 것이다
표 53 알려진 치의 근처에서 수행한 실험의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 08531 17304 15581 14024
(2 4) 28848 19664 19119 16940
(2 6) 35660 26708 23886 21409
(4 2) 19249 19293 15366 14529
(4 4) 23357 20129 16915 15456
(4 6) 31394 21525 20976 20923
(6 2) 34887 19249 18012 15129
(6 6) 18394 16532 15581 14587
치 (2 4)에서 Euclidean Bayesian 3 4 5에 한 RMSE는 28848
19664 16940로 Bayesian이 Euclidean 보다 더 나은 정확도를 제공함을
알 수 있다 그리고 Bayesian은 추 경로의 좌표수가 증가할수록 정확도
- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 41 -
가 더 높아졌다 치 (6 6)에서도 각 방법에 한 RMSE는 18394
16532 15581 14587로 치 (2 4)에서와 같은 결과를 확인할 수 있었다
51 의 알려진 치에서의 정확도 분석에서 치 (2 2)에서 Bayesian보
다 Euclidean이 더 나은 정확도를 보 다 (2 2) 근처에서 수행한 본 실
험에서도 같은 결과를 보 다 치 (4 6)에서도 51 의 실험에서
Bayesian의 정확도는 추 경로의 수가 3개일 경우보다 4 5개일 경우가
약간 낮은 정확도를 보 지만 3 4 5개 일 경우에 하여 정확도가 향상
되지 않았다 이것은 본 실험에서도 같은 결과를 얻었다 치(4 6)의 근
처에서 수행한 실험의 결과에서 RMSE는 각각 31394 21525 20976
20923로 Euclidean보다 정확도는 높지만 Bayesian의 정확도는 비슷한 수
치를 보 다 이것은 이 치에서 사람과 실험 공간의 구조 AP의 설치
장소 등 여러 가지 복합 인 요소들에 의해 신호세기가 향을 받아 나타
난 것으로 추측된다 그리고 Bayesian의 경우 추 경로 좌표 에러를
포함한 좌표로 인해 정확도가 낮아지는 것으로 추측된다 그러나 에러를
포함한 추 경로의 좌표가 사용되어도 그 정확도는 Euclidean 보다 더 좋
음을 알 수 있다 (2 2)와 (4 6)의 치를 제외한 다른 치에서는
Euclidean보다 Bayesian이 정확도가 더 높았으며 Bayesian은 추 경로의
좌표수가 증가할수록 더 나은 결과를 기록했다
53 2m간격의 신호세기 데이터베이스 작성
51과 52 에서 각 치에서 Bayesian 추론 방법의 측 정확도가 더
높았다 실제 환경에서 신호세기 데이터베이스를 1m로 할 경우 측 환경
이 커지면 데이터베이스를 작성하는 시간과 인력이 많이 소비된다 따라
서 각 치의 간격을 최 화하여 조정할 필요가 있다 본 에서는 각
치 간격을 2m로 다시 정하여 데이터베이스를 구성하 고 실험환경을 더
확장하 다 4호 334호실에서 몇 5개의 치를 선정하고 신호세기 데이
터베이스를 추가하 다 본 실험은 치 (2 2) (4 4) (6 6) (10 13)
(12 8)에서 수행하 다 다음 표 55는 2m로 결정된 데이터베이스를 바탕
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
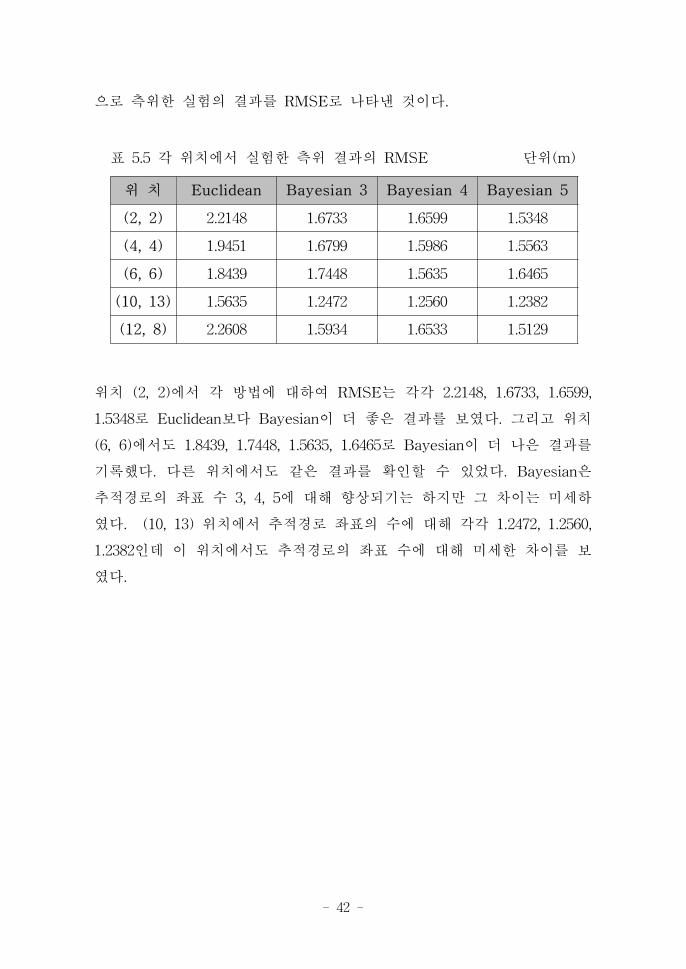
- 42 -
으로 측 한 실험의 결과를 RMSE로 나타낸 것이다
표 55 각 치에서 실험한 측 결과의 RMSE 단 (m)
치 Euclidean Bayesian 3 Bayesian 4 Bayesian 5
(2 2) 22148 16733 16599 15348
(4 4) 19451 16799 15986 15563
(6 6) 18439 17448 15635 16465
(10 13) 15635 12472 12560 12382
(12 8) 22608 15934 16533 15129
치 (2 2)에서 각 방법에 하여 RMSE는 각각 22148 16733 16599
15348로 Euclidean보다 Bayesian이 더 좋은 결과를 보 다 그리고 치
(6 6)에서도 18439 17448 15635 16465로 Bayesian이 더 나은 결과를
기록했다 다른 치에서도 같은 결과를 확인할 수 있었다 Bayesian은
추 경로의 좌표 수 3 4 5에 해 향상되기는 하지만 그 차이는 미세하
다 (10 13) 치에서 추 경로 좌표의 수에 해 각각 12472 12560
12382인데 이 치에서도 추 경로의 좌표 수에 해 미세한 차이를 보
다
- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 43 -
제 6 장 결론 고찰
실내 환경에서 치를 측 하기 한 시스템을 개발하기 해 RFID
UWB 외선 음 무선 랜 네트워크 등을 사용한 연구들이 많이 진
행되어 왔다 외선은 실내 측 연구에서 기에 수행된 것으로 외선
이 햇빛에 약하고 공간의 제약을 가지고 있다 그리고 음 는 정확도는
향상되나 그 범 가 외선과 마찬가지로 짧기 때문에 많은 장치를 설치
해야하기 때문에 비용이 비싸다 RFID 한 실내 측 를 해 연구가 많
이 수행 이다 RFID는 측 를 해 태그 리더 데이터 처리 시스템이
필요하며 사용자가 태그를 부착하게 된다 RFID는 가격이 조 씩 내려가
는 추세이지만 정확한 측 를 해서는 고가의 장비를 사용해야하는 문
제가 있다 UWB는 정확한 치 측정이 가능하지만 아직 표 화가 진행
이며 사람이나 은박지 등은 투과하지 못하는 단 이 있다 무선 랜 네
트워크는 재 공항 학교 등 공공건물에 설치가 증가하는 추세이다 그
리고 사업자가 측 를 해 직 자신의 사업장에 설치할 경우 사용자들
에게 측 서비스 뿐 아니라 모바일 환경에 속할 수 있도록 하므로 기
존의 다른 실내 측 장비들에 비해 가형의 시스템을 구 할 수 있다는
장 이 있다 무선 랜 네트워크를 이용한 측 시스템은 AP의 신호세기
를 이용한다 그리고 측 알고리즘으로는 무선 신호 달 방법 Euclidean
거리를 이용한 방법 Bayesian 추론을 이용한 방법 등이 있다
본 연구에서는 무선 랜 네트워크를 이용하여 측 시스템을 개발하 으
며 Euclidean 거리를 이용한 방법과 Bayesian 추론을 이용한 방법으로
알고리즘을 구 하 다 측 를 하여 실험 환경에서 57개의 치를 정
하고 1m 간격으로 신호세기 데이터베이스를 만들었다 그 다음으로 구
된 두 알고리즘의 정확도를 비교 분석하 다 정확도 비교 분석은 알려져
있는 치와 그 치의 근처에서 수행하 다 이 두 실험에서 측 정확
도는 Euclidean 거리를 이용한 방법보다 Bayesian 추론을 이용한 방법이
더 좋은 결과를 보 다 그리고 Bayesian 추론을 이용한 방법에서는 추
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 44 -
경로의 좌표수가 증가할수록 정확도는 더 높아졌다 추 경로의 좌표수가
증가할수록 정확도는 향상되지만 실제 사용자는 이동하면서 측 를 하게
된다 모든 이동경로의 좌표를 고려하게 될 경우 치 정확도가 크게 떨
어지며 시스템의 연산량만을 증가시켜 무리를 주게 된다 그리고 사용자
가 사용하는 모바일 장치는 PDA 노트북 등의 휴 가 편한 것으로 일반
PC보다 하드웨어의 사양이 낮은 제품들이다 따라서 본 연구에서 추 경
로의 좌표 수를 5개를 사용한 Bayesian 추론을 이용한 방법으로 측 모
니터링 시스템을 개발하 다
재 통신 장비와 통신 환경의 발달 등으로 이용자들이 증가하고 있는
추세이다 사용자가 증가함에 따라 제공되는 서비스의 종류도 많아지고
있으며 사용자의 치를 제공하는 등 사용자 심의 서비스로 변하
고 있다 무선 랜 네트워크를 이용한 측 시스템은 사업자가 이동통신
업체를 통하지 않고서도 자신의 사업장에 직 시스템을 구 하여 자신이
제공하고자 하는 목 의 서비스를 고객들에게 제공할 수 있다 그리고 일
반 사용자들도 측 시스템을 구 하여 사용할 수 있다 한 본 연구에
서 개발한 측 시스템은 미리 결정된 치에서 사 에 측정된 신호세기
정보를 사용하기 때문에 측 환경이 변할 경우 변화된 환경에서 다시 신
호세기 데이터베이스를 만들기 때문에 일반 인 측 모델 수립이 가능하
다 그리고 AP에 무지향성 안테나를 설치하 기 때문에 다른 환경에서
AP의 설치 치나 배열이 달라져도 측 결과에는 향을 미치지 않는
다 본 연구는 가형의 측 시스템으로서 일반 사용자들이 직 시스템
을 구 하고자 하는 경우 사 연구로서 많은 기여를 할 수 있을 것으로
기 된다
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-
- 45 -
참고문헌
[1] 박옥선 정 렬 김성희 유비쿼터스 컴퓨 을 한 치인식 기술
시스템 ETRI 주간기술동향 1098호 2003 6
[2] Roy Want1 and Andy Hopper etc The Active Badge Location
System Olivetti Research Ltd Cambridge England
[3] Joshua A Tauber Indoor Location Systems for Pervasive
Computing August 2002
[4] Andreas Savvides etc Dynamic Fine-Grained Localization in
Ad-Hoc Networks of Sensors ACM SIGMOBILE 701 Rome Italy
[5] Nissanka B Priyantha and Anit Chakraborty etc The Cricket
Location-Support System 6th ACM International Conference on
Mobile Computing and Networking (ACM MOBICOM) Boston MA
August 2000
[6] Nissanka B Priyantha and Allen K L Miu The Cricket Compass
for ContextAware Mobile Applications 7th ACMConf Mobile
Computing and Networking (MOBICOM) July 2001 pp 1~14
[7] Paramvir Bhal etc RADAR An In-Building RF-based User
Location and Tracking System 2002 IEEE
[8] 이철웅 안명욱 유비쿼터스 환경의 핵심-RFID 한성 학교 2005
[9] 이성호 김동 송승헌 성태경 성세진 실내 측 용 UWB 시스템
성능평가 제 12차 GNSS Workshop Jeju Korea December 2005
[10] ZXing etc A Wireless Lan-based Indoor Positioning
Technology Vol 48 No56 SeptemberNovember 2004
[11] Teemu Roos etc A Probabilistic Approach to WLAN User
Location Estimation International Journal of Wireless Information
Networks Vol9 No 3 July 2002
[12] Ping Tao etc Wireless Lan Location-Sensing for Security
- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-

- 46 -
Applications Wise03 September 19 2003
[13] Andrew M Ladd etc Robotics-Based Location Sensing Using
Wireless Ethernet Wireless Networks 11 189-204 2005
[14] HanTechSnS httpwwwhtsnscom
- 목차
-
- 제 1 장 서 론
-
- 11 연구 배경 및 목적
- 12 연구 내용 및 범위
-
- 제 2 장 실내측위 방법론
-
- 21 측위 방법론
-
- 211 위치 결정 방법
-
- 2111 삼각측량(Triangulation)
- 2112 장면 분석(Scene Analysis)
- 2113 근접 방식(Proximity)
- 2114 Ad-hoc 네트워크 방식
-
- 212 측위 시스템
-
- 2121 이동통신망을 이용한 측위
- 2122 Active Badge System
- 2123 Active Bat System
- 2124 Criket System
- 2125 RADAR 시스템
- 2126 RFID 태그를 이용한 방법
- 2127 UWB를 사용한 측위 시스템
-
- 22 무선 랜 네트워크를 이용한 실내측위 알고리즘
-
- 221 무선 신호전달 방법
- 222 Euclidean 거리를 이용한 방법
- 223 확률추론을 이용한 방법
-
- 2231 Gaussian 확률밀도함수를 이용한 방법
- 2232 Bayesian 추론을 이용한 방법
-
- 제 3 장 AP의 신호세기 특성 분석
-
- 31 실험 환경
- 32 24시간 신호세기 분석
- 33 벽의 신호 감쇄율 분석
-
- 제 4 장 측위 모니터링 시스템 구현
-
- 41 실내측위 시스템 구현
-
- 411 신호세기 측정 부분
- 412 측위 부분
- 413 서버와의 통신 부분
- 414 디스플레이 부분
-
- 42 모니터링 서버 부분
- 43 신호세기 데이터베이스 작성
-
- 제 5 장 측위 정확도 분석
-
- 51 알려진 위치에서의 정확도 분석
- 52 알려진 위치의 근처에서 수행한 정확도 분석
- 53 2m간격의 신호세기 데이터베이스 작성
-
- 제 6 장 결론 및 고찰
- 참고문헌
-
- 표목차
-
- 표 21 RFID의 주파수 대역에 따른 태그의 특성[8]
- 표 31 24시간 신호세기 변화의 평균과 표준편차
- 표 33 벽에 의한 신호세기 감쇄의 평균과 표준편차
- 표 41 신호세기 처리에 사용되는 함수
- 표 42 측위 부분에서 작성된 함수
- 표 43 통신 부분에서 사용되는 함수
- 표 44 서버 통신 부분에서 사용되는 함수
- 표 51 각 위치에서의 측위 결과의 RMSE 비교(단위(m))
- 표 53 알려진 위치의 근처에서 수행한 실험의 RMSE(단위(m))
- 표 55 각 위치에서 실험한 측위 결과의 RMSE(단위(m))
-
- 그림목차
-
- 그림 11 연구 내용
- 그림 21 AOA방식의 측위 원리
- 그림 22 TOA방식의 측위 원리
- 그림 23 TDOA방식의 측위 원리
- 그림 24 Active Bat System의 측위 원리
- 그림 25 Multilateration의 예[5]
- 그림 26 RFID를 이용한 측위 원리
- 그림 31 실험환경 인하대학교 4호관 신관 3층
- 그림 32 실험 장비
- 그림 33 AP 4로부터 측정한 신호세기 특성(24시간)
- 그림 34 AP 5로부터 측정한 신호세기 특성(24시간)
- 그림 35 벽에 의한 신호 감쇄 특성 분석 실험 환경
- 그림 36 벽에 의한 신호 감쇄 특성 분석
- 그림 41 측위 시스템 구성도
- 그림 42 측위 시스템
- 그림 43 NDIS 드라이버 구성도[14]
- 그림 44 신호세기 데이터베이스 작성 위치
- 그림 45 신호세기 데이터베이스 작성 예
- 그림 51 좌표 (4 4)의 정확도 분석
-