design of intelligent infusion system based on fuzzy...
TRANSCRIPT

Design of Intelligent Infusion System
based on Fuzzy Control
Yu Liu1, Benzhen Guo2, Jingjing Yang3, Zhihui Wang4 and Xiao Zhang5*
Hebei North University, Zhangjiakou, Hebei 075000, China
Abstract. Infusion is an important and widely used treatment method in present
medical practice. The dripping speed of infusion is an important parameter
during the infusion process. This paper introduced an intelligent infusion
system with dripping speed remote setting and abnormal situation alarm
function. The dripping speed control is achieved with fuzzy-PID control with
auto adjusted factors. The test results show the characteristics of fast response
and high accuracy of the intelligent infusion system.
Keywords: Intelligent infusion system; Fuzzy Control; PID Control.
1 Introduction
Clinical medicine has a rapid development in recent years, meanwhile, hospitals also
have strengthened the construction toward information, automation and intelligent.
The present status of the hospital in China is heavy workload on nurses, patients and
medical staff. Nurses adjust the infusion speed with experience and bare eyes, this
infusion speed management method can result in disastrous medical accidents
whether the infusion speed is too low or too fast. Fuzzy control refers to the
application of the fuzzy theory in the control technology. The fuzzy control uses
language variables instead of mathematical variables. The fuzzy control is suitable for
the industrial process without a mathematical model or hard to build a mathematical
model, variables in those process tend to be non-linear variables. Fuzzy control
doesn't need a specific mathematical model, it's an efficient way to solve uncertain
problems in non-leaner systems. The dripping speed control system in the intelligent
infusion system is a non-leaner system, therefore the fuzzy control method can be
used in the intelligent infusion system to achieve precise and accurate control of the
dripping speed.
*Corresponding Author
Advanced Science and Technology Letters Vol.141 (GST 2016), pp.204-208
http://dx.doi.org/10.14257/astl.2016.141.44
ISSN: 2287-1233 ASTL Copyright © 2016 SERSC

2 The Fuzzy Control Algorithm
Current fuzzy control algorithm tends to produce steady-state error, in order to
diminish the error to achieve the traumatic infusion dripping speed control, a adjusted
fuzzy control algorithm must be adopted.
2.1 Fuzzy - PID Compound Controller
To improve the precision and tracking the performance of the fuzzy controller, the
controller must use more variables, meanwhile, the number of rules and calculation
amount are also greatly increased. One way to solve this contradiction is using
different control method in different theory domain. Assume EP is one threshold,
when EEP; the system use fuzzy control; when E<EZ, the system use PID control.
Then, the fuzzy-PID control method not only improve the system's response time,
response accuracy and robustness, also the control method can realize high accuracy
fuzzy-PID control. The structure of the control method is shown in Fig.1.
Fig.1. The structure of the fuzzy-PID compound controller
The optimal switch point is selected based on the following idea: When the system
changes from fuzzy mode to PID mode, the optimal point is where the language value
equals to “zero” (ZE). The system is under PID control mode when E=ZE, the PID
algorithm is:
ninnpnn EKEEKUU )( 11 (1)
In (1), Kp is ratio coefficient, Ki is integral coefficient, U is the output control
variable of PID.
When language variable in fuzzy control equals to "zero" (ZE), the absolute error is
not necessarily zero, in fact, on this basis, the state performance of the system can be
improved according to the absolute error and error change trend. This integrator
works as integral function when the absolute error is increasing while the absolute
error is decreasing the integrator equals to a constant, when E=0 or the integral is
saturated, the integrator can reset automatically.
The simulation results show that the fuzzy-PID controller, comparing to the
conventional PID controller, advances in the anti-external disturbance, high
robustness, low overshoot and fine dynamic characteristics. Compare to the simple
fuzzy control mode, the fuzzy-PID control mode has good characteristics of accuracy
and precision.
Advanced Science and Technology Letters Vol.141 (GST 2016)
Copyright © 2016 SERSC 205

2.3 The PID Control Algorithm
PID controller is a kind of regulator based on proportional, integral, derivative
methods, it's the most widely used continuous system regulator. It has the
characteristics of simple structure and easy setting. Through the using experience and
theoretical analysis, the PID regulator can result in satisfied control effects on
different control objects. In the fuzzy-PID controller, the PID control algorithm is:
0
1 ( )( ) [ ( ) ( ) ]
( )p d
i
de tu t k e t e t dt T
T d t (2)
In (2), u(t) is the output of the regulator, e(t) is the deviation signal, e(t) equals to
the subtraction of the setting value and the output, kp is the proportional coefficient,
Ti is the time integral coefficient, Td is the time derivative coefficient.
The computer system is a kind of sampling control system, it can only can
calculate the control variable based on the sampling time deviation, thus to achieve
(2), the data must be discretized, and the differential equation in the continuous
system must be replaced by partial difference equation.
The discretization of the continuous system can use the equation:
( 0,1,2, , )t KT K n (3)
Integral with cumulative summation approximation:
0 00
( ) ( ) ( )k k
j j
e t dt e j T T e j
(4)
Differential of the first-order approximation:
( ) ( ) ( 1)de t e k e k
dt T
(5)
In (5), T is sampling period, e(k) is the deviation of number k sampling, e(k-1) is
the deviation of the number k-1 sampling. Based on (4) and (5), (3) is changed to:
0
( ) { ( ) ( ) [ ( ) ( 1)]}k
dP
Ji
TTu k K e k e j e k e k
T T
(6)
If the sampling period T is small enough, (6) is proximate simulation of the PID
algorithm. In real situation, every output is related to all the previous state, the
calculation isn’t efficient with (6), the deduction form of (6) is:
0 1 2( ) ( 1) ( ) ( 1) ( 2)u k u k a e k a e k a e k (7)
In (7), 0 1 2
2(1 ), (1 ),d d d
p p p
i
T T TTa k a k a k
T T T T .
Equation (7) is the PID control algorithm used in the intelligent infusion system.
2.4 Empirical Analysis of the Control Performance
To study the performance of the fuzzy controller with self-adjusting factors, the
mixed empirical analysis is used in this paper. On one side, under the same control
Advanced Science and Technology Letters Vol.141 (GST 2016)
206 Copyright © 2016 SERSC

object, compare this controller to the fuzzy control fixed adjusting factors, on the
other side, by changing the parameters of the control objects, observe the robustness.
Selecting the typical second order link as the control object, the parameters of the
control objects and performance data of the two kinds of fuzzy controller is shown in
Table 1.
Table 1. Comparing of the performance of fixed adjusting and auto adjusting fuzzy controller
Parameters Fixed adjusting
fuzzy controller
Auto adjusting
fuzzy controller
T1 T2 ts 6p(%) ts 6p(%) 0.5 1 1.9 0 1.6 0
0.8 1.5 4.2 0 3.1 0
1 2 6.8 2.1 5.2 2.1
From the performance data, the auto adjusting fuzzy controller has low response
time and overshoot, and it also has better robustness on the changing of variables than
the fixed adjusting fuzzy controller.
3 The Implementation of the Fuzzy Controller
The control of the dripping speed uses fuzzy-PID compound control algorithm, this
algorithm can increase the system's precision as well as improve the system overall l
performance. The infusion speed deviation e and deviation rate ec are the input
variables of the fuzzy controller, the increment steps u of the stepper motor is the
output variable of the fuzzy controller, the control diagram is shown in Figure 2.
Fig. 2. The control diagram of the Fuzzy-PID controller
Advanced Science and Technology Letters Vol.141 (GST 2016)
Copyright © 2016 SERSC 207
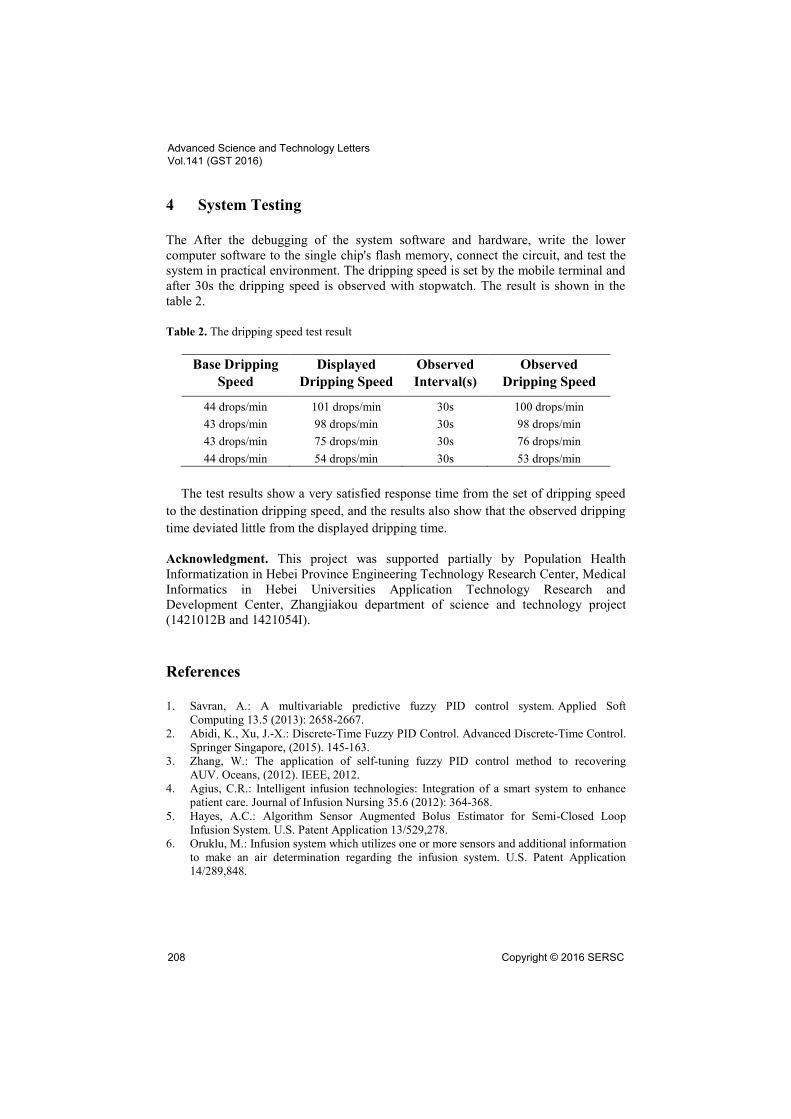
4 System Testing
The After the debugging of the system software and hardware, write the lower
computer software to the single chip's flash memory, connect the circuit, and test the
system in practical environment. The dripping speed is set by the mobile terminal and
after 30s the dripping speed is observed with stopwatch. The result is shown in the
table 2.
Table 2. The dripping speed test result
Base Dripping
Speed
Displayed
Dripping Speed
Observed
Interval(s)
Observed
Dripping Speed
44 drops/min 101 drops/min 30s 100 drops/min
43 drops/min 98 drops/min 30s 98 drops/min
43 drops/min 75 drops/min 30s 76 drops/min
44 drops/min 54 drops/min 30s 53 drops/min
The test results show a very satisfied response time from the set of dripping speed
to the destination dripping speed, and the results also show that the observed dripping
time deviated little from the displayed dripping time.
Acknowledgment. This project was supported partially by Population Health
Informatization in Hebei Province Engineering Technology Research Center, Medical
Informatics in Hebei Universities Application Technology Research and
Development Center, Zhangjiakou department of science and technology project
(1421012B and 1421054I).
References
1. Savran, A.: A multivariable predictive fuzzy PID control system. Applied Soft
Computing 13.5 (2013): 2658-2667.
2. Abidi, K., Xu, J.-X.: Discrete-Time Fuzzy PID Control. Advanced Discrete-Time Control.
Springer Singapore, (2015). 145-163.
3. Zhang, W.: The application of self-tuning fuzzy PID control method to recovering
AUV. Oceans, (2012). IEEE, 2012.
4. Agius, C.R.: Intelligent infusion technologies: Integration of a smart system to enhance
patient care. Journal of Infusion Nursing 35.6 (2012): 364-368.
5. Hayes, A.C.: Algorithm Sensor Augmented Bolus Estimator for Semi-Closed Loop
Infusion System. U.S. Patent Application 13/529,278.
6. Oruklu, M.: Infusion system which utilizes one or more sensors and additional information
to make an air determination regarding the infusion system. U.S. Patent Application
14/289,848.
Advanced Science and Technology Letters Vol.141 (GST 2016)
208 Copyright © 2016 SERSC