design methods for control systems - dynamics and … institute of systems and control steady-state...
TRANSCRIPT

Dutch Institute of Systems and Control
Chapter 2
Classical Control SystemDesign

Dutch Institute of Systems and Control
Steady-state errorsSteady-state errors
Type k systemsType k systems
Integral controlIntegral control
Frequency response plotsFrequency response plots
Bode plotsBode plots
Nyquist plotsNyquist plots
Nichols plotsNichols plots
Classical design specificationsClassical design specifications
Lead, lag, lead-lag compensationLead, lag, lead-lag compensation
Quantitative Feedback TheoryQuantitative Feedback Theory
IntroductionIntroduction Classical design techniquesClassical design techniques
Ch. 2. Classical control system designCh. 2. Classical control system design
M- and N-circlesM- and N-circles
Guillemin-Truxal methodGuillemin-Truxal method
Root locusRoot locus
Overview
Dutch Institute of Systems and Control
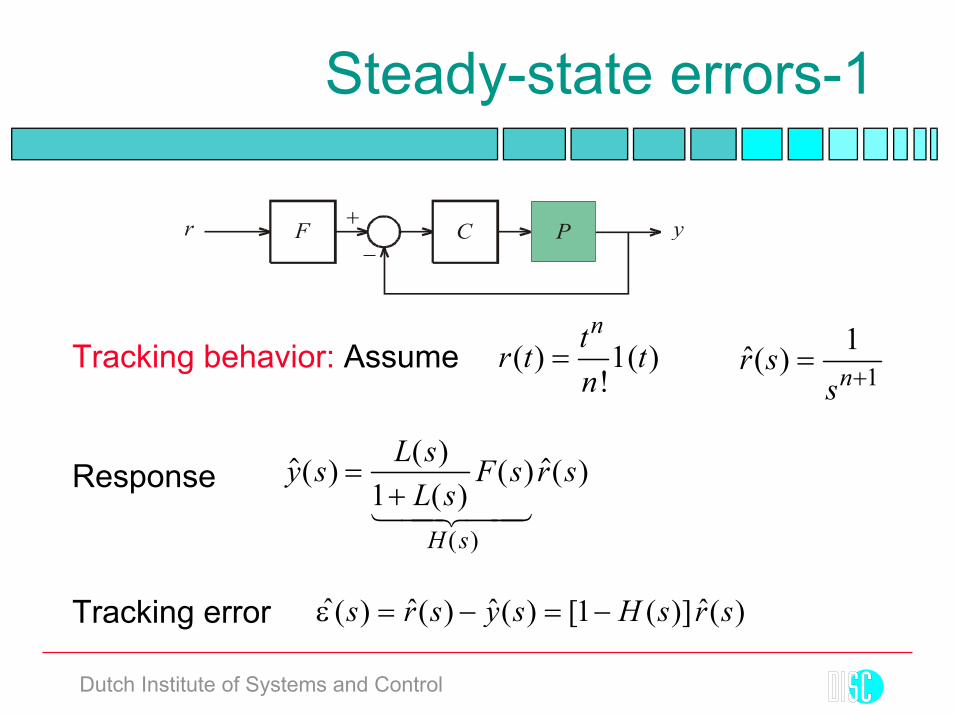
Steady-state errors-1
Tracking behavior: Assume
Tracking error
r yF C P+
−
( ) 1( )!
ntr t tn
=1
1ˆ( ) nr ss +
=
$( ) ( )( )
( ) $( )
( )
y s L sL s
F s r s
H s
=+11 244 344
Response
ˆ ˆ ˆ ˆ( ) ( ) ( ) [1 ( )] ( )s r s y s H s r sε = − = −

Dutch Institute of Systems and Control
Steady-state errors-2
Steady-state tracking error
If F(s)=1 (no prefilter) then
( )0 0
1 ( )ˆlim ( ) lim ( ) limnnt s s
H st s ss
ε ε ε∞→∞ → →
−= = =
( )0
1lim[1 ( )]
nns s L s
ε∞→
=+
11 ( )1 ( )
H sL s
− =+

Dutch Institute of Systems and Control
Type k system
A feedback system is of type k if
Then
( )( ) , (0) 0o
okL s
L s Ls
= ≠
( )
0
0
1lim[1 ( )]
0 for 0lim 1/ (0) for
( )for
nns
k n
okso
s L sn k
s L n ks L s
n k
ε∞ →
−
→
=+
≤ <= = =+ ∞ >

Dutch Institute of Systems and Control
Steady-state errors-3

Dutch Institute of Systems and Control
Integral control-1
Integral control:Design the closed-loop system such that
Type k control:
Results in good steady-state behavior
Also:
( )( ) oL s
L ss
=
( )( ) o
kL s
L ss
=
1( ) ( ) for 01 ( ) ( )
kk
ko
sS s s sL s s L s
= = = →+ +
O

Dutch Institute of Systems and Control
Integral control-2
then the steady-state error is zero if n < k (rejection)
Hence if
( ) ( ) for 0kS s s s= →O
11ˆ( ) 1 ( ), ( )
!
n
ntv t t v sn s +
= =
k = 1: Integral control: Rejection of constant disturbancesk = 2: Type-2 control: Rejection of ramp disturbancesEtc.
Type k control:

Dutch Institute of Systems and Control
Integral control-3
Integral control:
“Natural” integrating action is present if the plant transferfunction has one or several poles at 0
If no natural integrating action exists then the compen-sator needs to provide it
The loop has integrating action of order k
( )( ) ( ) ( )o
kL s
L s P s C ss
= =

Dutch Institute of Systems and Control
Integral control-4
“Pure” integral control: 1( )i
C ssT
=
1( ) 1i
C s gsT
= +
1( ) 1di
C s g sTsT
= + +
PI control:
PID control:
Ziegler-Nichols tuning rules

Dutch Institute of Systems and Control
Internal model principle
Asymptotic tracking if model of disturbance is included inthe compensator
Francis, D.A. and Wonham, W.M., (1975) The internal model principle forlinear multivariable regulators, Applied Mathematics and Optimization, vol 2,pp. 170-194

Dutch Institute of Systems and Control
Frequency response plots
Bode plots Nichols plots
Nyquist
plots

Dutch Institute of Systems and Control
Bode plots-1
2
2 2( )( ) 2 ( )
o
o o oL j
j jω
ωω ζ ω ω ω
=+ +
Bode plot:doubly logarithmicplot of |L(jω)| versusωsemi logarithmic plotof arg L(jω) versus ω

Dutch Institute of Systems and Control
Bode plots-2
Helpful technique:
By construction of the asymptotic Bode plots ofelementary first- and second-order factors of the form
1 2
1 2
( )( ) ( )( )
( )( ) ( )m
m
j z j z j zL j k
j p j p j pω ω ω
ωω ω ω
− − −=
− − −L
L
The shape of the Bode plot of
2 2 20( ) 2 ( )o oj j jω α ω ζ ω ω ω+ + +and
may be sketched

Dutch Institute of Systems and Control
Nyquist plots
Nyquist plot: Locus ofL(jω) in the complex planewith ω as parameterContains less informationthan the Bode plot if ω isnot marked along thelocus
2
2 2( )( ) 2 ( )
o
o o oL j
j jω
ωω ζ ω ω ω
=+ +

Dutch Institute of Systems and Control
M- and N-circles-1
M-circle: Locus of points z in the complex plane where
Closed-loop transfer function:
N-circle: Locus of points z in the complex plane where
H LL
T=+
=1
zz
M1+
=
arg zz
N1+
=
L−
r y+

Dutch Institute of Systems and Control
M- and N-circles-2

Dutch Institute of Systems and Control
Nichols plots
Nichols plot: Locus ofL(jω) with ω as para-meter in the
log magnitudeversus
argumentplane
Nichols chart: Nichols plotwith M- and N-lociincluded
2
2 2( )( ) 2 ( )
o
o o oL j
j jω
ωω ζ ω ω ω
=+ +

Dutch Institute of Systems and Control
Time
domain
Freq
uenc
ydo
mainBandwidth,resonance peak,roll-on and roll-off ofthe closed-loopfrequency responseand sensitivityfunctions; stabilitymargins
Rise time, delay time,overshoot, settling time,steady-state error of theresponse to stepreference anddisturbance inputs;error constants
Classical design specifications

Dutch Institute of Systems and Control
Classical design techniques
Lead, lag, and lag-lead compensation (loopshaping)(Root locus approach)(Guillemin-Truxal design procedure)Quantitative feedback theory QFT (robust loopshaping)

Dutch Institute of Systems and Control
Classical design techniques
Change open-loop L(s) to achieve certain closed-loop specsfirst modify phasethen correct gain
Rules for loopshaping

Dutch Institute of Systems and Control
Lead compensation
Lead compensation:Add extra phase in thecross-over region toimprove the stabilitymarginsTypical compensator:“Phase-advancenetwork”
1( ) , 0 11
j TC jj Tω
ω α αωα
+= < <
+

Dutch Institute of Systems and Control
Lead/lag compensator
1( )1
j TC jj Tω
ω αωα
+=
+

Dutch Institute of Systems and Control
Lag compensation
Lag compensation:Increase the low frequency gain without affecting thephase in the cross-over region
Example: PI-control:
1( ) j TC j kj Tω
ωω
+=

Dutch Institute of Systems and Control
Lead-lag compensation
Lead-lag compensation: Joint use oflag compensation at low frequenciesphase lead compensation at crossover
Lead, lag, and lead-lag compensation are always usedin combination with gain adjustment

Dutch Institute of Systems and Control
Notch compensation
(inverse) Notch filters:
suppression of parasitic dynamicsadditional gain at specific frequencies
Special form of general second order filter

Dutch Institute of Systems and Control
Notch compensation
12
12
222
2
21
121
2
++
++==
ωβ
ω
ωβ
ωε ss
ssuH
“Notch”-filter :ω1= ω2

Dutch Institute of Systems and Control
Notch compensation
ampl.
fase
2
1
ββ
0°

Dutch Institute of Systems and Control
Root locus method-1
Important stage of many designs: Fine tuning of
gaincompensator pole and zero locations
Helpful approach: the root locus method (use rltool!)

Dutch Institute of Systems and Control
Root locus method-2
Closed-loop characteristic polynomial
Root locus method: Determine the loci of the roots of χ asthe gain k varies
1 2
1 2
( )( ) ( )( )( )( ) ( )( ) ( )
m
n
s z s z s zN sL s kD s s p s p s p
− − −= =
− − −L
L
1 2 1 2
( ) ( ) ( )( )( ) ( ) ( )( ) ( )n m
s D s N ss p s p s p k s z s z s z
χ = += − − − + − − −L L
L−

Dutch Institute of Systems and Control
Root locus method-3
Rules:For k = 0 the roots are the open-loop poles piFor k → ∝ a number m of the roots approach theopen-loop zeros zi. The remaining roots approach ∝The directions of the asymptotes of those roots thatapproach ∝ are given by the angles
1 2 1 2( ) ( )( ) ( ) ( )( ) ( )n ms s p s p s p k s z s z s zχ = − − − + − − −L L
2 1 , 0, 1, , 1i i n mn m
π+
= − −−
L

Dutch Institute of Systems and Control
Root locus method-4
The asymptotes intersect on the real axis in the point
Those sections of the real axis located to the left ofan odd total number of open-loop poles and zeros onthis axis belong to a locusThe loci are symmetric with respect to the real axis....
(sum of open-loop poles) (sum of open-loop zeros)n m−−

Dutch Institute of Systems and Control
Root locus method-5
( )( 2)
kL ss s
=+
( 2)( )( 1)
k sL ss s
+=
+( )
( 1)( 2)kL s
s s s=
+ +

Dutch Institute of Systems and Control
Guillemin-Truxal method-1
Procedure:Specify HSolve the compensator from
Closed-loop transferfunction:
1PCH
PC=
+
11
HCP H
= ⋅−
C P−
+
yr

Dutch Institute of Systems and Control
Guillemin-Truxal method-2
Example: Choose
This guarantees the system to be of type m + 1
11 0
1 11 1 0
( )m m
m mn n m m
n m m
a s a s aH s
s a s a s a s a
−−
− −− −
+ + +=
+ + + + + +
L
L L
How to choose the denominator polynomial?Well-known options:
Butterworth polynomialsOptimal ITAE polynomials

Dutch Institute of Systems and Control
Butterworth and ITAE polynomials
Butterworth polynomialsChoose the n left-half plane poles on the unit circle sothat together with their right-half plane mirror imagesthey are uniformly distributed along the unit circle
ITAE polynomialsPlace the poles so that
is minimal, where e is the tracking error for a step input
0( )t e t dt
∞
∫

Dutch Institute of Systems and Control
Butterworth and ITAE
0m =
Dutch Institute of Systems and Control
Guillemin-Truxal method-3
Disadvantages of the method:Difficult to translate the specs into an unambiguouschoice of H. Often experimentation with other designmethods is needed to establish what may beachieved. In any case preparatory analysis isrequired to determine the order of the compensatorand to make sure that it is properThe method often results in undesired pole-zerocancellation between the plant and the compensator

Dutch Institute of Systems and Control
Quantitative feedback theory QFT-1
Ingredients of QFT:For a number of selected frequencies, represent theuncertainty regions of the plant frequency responsein the Nichols chartSpecify tolerance bounds on the magnitude of TShape the loop gain so that the tolerance boundsare never violated

Dutch Institute of Systems and Control
QFT-2
Example: Plant
Parameter uncertainties:
Nominal parameter values:
Tentative compensator:
2( )(1 )
gP ss sθ
=+
1, 0g θ= =
( ) , 1, 1.414, 0.11
dd o
o
k sTC s k T T
sT+
= = = =+
0.5 2, 0 0.2g θ≤ ≤ ≤ ≤

Dutch Institute of Systems and Control
QFT-3
Responses of the nominal design
Specs on |T |
Frequency[rad/s]
0.212510
Tolerance band[dB]
0.5251020

Dutch Institute of Systems and Control
Uncertainty regions
Uncertaintyregions for thenominal designThe specs arenot satisfiedAdditionalrequirement:The critical areamay not beentered

Dutch Institute of Systems and Control
QFT-4
Design method: Manipulate the compensator frequencyreponse so that the loop gainsatisfies the tolerance boundsavoids the critical region
Preparatory step 1: For each selected frequency,determine the performance boundaryPreparatory step 2: For each selectedfrequency,determine the robustness boundary

Dutch Institute of Systems and Control
Performance and robustness boundaries
Nominal plantfrequencyresponse
Robustnessboundaries
Performanceboundaries

Dutch Institute of Systems and Control
QFT-5
Design step: Modify the loop gain such that for eachselected frequency the corresponding point on the loopgain plot lies above and to the right of the correspondingboundaryFor the case at hand this may be accomplished by a leadcompensator of the form
1
2
1( )1
sTC ssT
+=
+
Step 1: Set T2 = 0, vary T1
Step 2: Keep T1 fixed, vary T2

Dutch Institute of Systems and Control
QFT-6
Eventualdesign:T1 = 3T2 = 0.02

Dutch Institute of Systems and Control
QFT-7
Responses of theredesigned system

Dutch Institute of Systems and Control
cl ( ) 0.02 ( 2.7995)(( 46.8190.38 0)( ) 1
15)D s s ss
sN
= ++ +=
Prefilter design-1
2½-degree-of-freedomconfigurationClosed-loop transferfunction
For the present case:
H NFD
Fo=cl
P− +
+
r
zu
Y
F
X
X
Co
e
Fo

Dutch Institute of Systems and Control
Prefilter design-2
Use the polynomial F to cancel the (slow) pole at –0.3815,and let
Perturbedresponses
F ss so
o
o o oo o( ) , ,=
+ += =
ω
ζ ω ωω ζ
2
2 2122
1 2