design, development, and preliminary testing of an ... · tonomous robot with a six wheel drive...
TRANSCRIPT
Proceedings of The Canadian Society for Mechanical Engineering International Congress 20162016 CCToMM M3 Symposium
June 26-29, 2016, Kelowna, British Columbia, Canada
DESIGN, DEVELOPMENT, AND PRELIMINARY TESTING OF AN AUTONOMOUS
AMPHIBIOUS ROBOT
Mark Borg, Scott Nokleby, Luke Puccini, Addel Mezil, Brian Lau, Omer Dobrescu, Joseph Idris, Alvin Chan, Carla Cain,Kelly Long, Keval Thaker, Kevin Lam
Faculty of Engineering and Applied ScienceUniversity of Ontario Institute of Technology
Oshawa, [email protected] and [email protected]
Abstract— This paper presents the design and development ofan Autonomous Amphibious Robot (AAR). The AAR designis presented in detail. The AAR was tested outdoors, overland and water to demonstrate that the design meets all of thecustomer requirements. The AAR successfully drove with six-wheel drive, over land based obstacles and into Lake Ontariountil it was floating. The robot proceeded to transition to waterjet propulsion and navigated circular maneuvers. The AAR re-turned to the location it entered the water and transitioned fromwater propulsion back to wheeled drive. The robot powered outof the water and back onto land. This work represents the firststep toward developing an autonomous robot.
Keywords- amphibious; autonomous; robot; littoral
I. INTRODUCTION
In the area of amphibious, autonomous robots there has beenlimited research. Amphibious robots with the ability to handlerough terrain, with obstacles, are especially under represented.This is represented best by the lack of preparedness shownduring the 2011 Fukushima disaster in Japan. During the hoursand days that followed the tsunami on March 11 the tragedyoffered an unequalled opportunity for autonomous, amphibiousrobots to aid in the relief efforts. Unfortunately, the current state-of-the-art robotics were not up for the challenges. Researchersin this field have been scrambling to fill the gap.
Based on the current limited knowledge on the topic ofamphibious, autonomous robots, the design, development andtesting of an amphibious, mobile robot is offered in this paper.A platform with the Autonomous Amphibious Robot’s (AAR’s)capability could be used to fill many needs such as searchand rescue, natural disaster support, research, environmentalmonitoring, and mapping.
Natural environments are difficult for a robot to negotiatedue to the broad variation of types of ground coverage andsea states. This expansive spectrum of environments forces the
design of a robot that is robust and adaptable. All mechanicalsystems must be able to operate and navigate through slippery,wet, caustic, and uneven ground environments. Amphibiousrobots that can move through heavily cluttered, littoral zoneshave not been addressed in the current literature. The littoralzone is the area close to and including the shoreline as shown inFigure 1.
Figure 1. AAR operating in the littoral zone
Continued work in this field will bring a new, much neededunderstanding of the limitations, difficulties, and critical knowl-edge needed for this type of robot. The research conducted onthe AAR will assist in the design of future amphibious robotswhose design is to assist in emergency response and remoteresearch. The objective for this paper is to present the designof a novel amphibious robot that can navigate over land as wellas water. This work represents a first step towards the goal ofautonomy.
Section II presents a literature review of the present stateof robots in this field. The system requirements defining whatcapabilities the AAR is required to possess are shown in Section
1 Copyright c© 2016 by CSME

III. Section IV presents the design of the AAR. Preliminarytesting of the AAR on land and in the water are discussed inSection V. The paper finishes with conclusions in Section VI.
II. LITERATURE REVIEW
Autonomous, amphibious robots perform navigation, posi-tioning, and other functions on land, above and/or below water,and in a combination of these environments such as swampsand bogs. Research is focused on the ability of navigating acurrent, normally human guided, amphibious platform throughcomplex environments such as natural and man-made disasters.An environment exposed to a natural disaster adds the complex-ity of natural and man-made storm debris and complex energyenvironments including nuclear radiation. A notoriously hardarea to navigate, for an amphibious craft, is the littoral area.
Major issues to overcome, in an autonomous, amphibiousrobotic system, are: communication, avoidance of water im-pingement, localization in both the terra environment as wellas on the water, localization and path planning, propulsion overvaried terrain, extreme temperature swings, buoyancy, powerconsumption, power creation, and longevity. Operating in andunder the water requires the most robust systems and necessi-tates strong solutions to locomotion, sensing, communication,and navigation. Although these concerns are not exclusive toamphibious robotic systems, the blending of these requirements,in a hostile environment, does present for a multi-faceted design.
Amphibious robot design has come to the forefront of thepublic’s attention due to a number of natural disaster eventsthat required specialized robots to keep humans out of harmsway. Such an event was the 2011 tsunami in Japan whichrequired a varied response such as victim recovery and dealingwith nuclear reactor cooling failure. Requirements that therobots could traverse a multitude of mediums such as waterand broken ground has introduced a surge in research on thistopic. This has led to an unprecedented financial investment,such as the DARPA challenge, and an increase in knowledgein the field of amphibious, autonomous robotics. For the 2014fiscal year, the United States military, set aside $137 millionin research and development for the design of an amphibiouscombat vehicle [1]. This type of vehicle is also being studiedfor the addition of autonomous functionality that could makean amphibious vehicle a desirable unmanned supply deliverysystem for dangerous or difficult to access areas. Currently theUnited States Navy is working on an amphibious robot foroperation in the littoral zone. This platform, code named Sea-Dragon, is designed to escort marines to and from the beachhead[2].
The terrain that an amphibious robot must traverse include,but are not exclusive to: water, mud, gravel, sand, large rocks,and undulating, uneven ground. NASA has designed their Marsrovers for similar terrain [3]. Their solution to this is an au-tonomous robot with a six wheel drive rocker-bogie suspensionsystem. This passive suspension system allows for all six wheels
to be in contact over uneven terrain. In order to keep themain body of the rovers level, a differential system utilizing anoverhead torsional bar is employed [4].
The amphibious robot AQUA uses six legs in an insect likewalking gait and also uses these legs as paddles to swim. TheMcGill University robot has had software upgrades over thepast ten years to allow it different swimming and walking gaitsdependant on terrain composition. The upgrades include spatialrecognition, trinocular vision, station keeping, diving capabilityto 30 meters, and a swimming speed of 1 m/s. AQUA has hadmultiple feet and flipper iterations that allow it to move throughthe water more efficiently as well as walk on the ocean floor andmove on land [5].
In order to properly guide an autonomous, amphibiousrobot it is very important to understand where the robot is inrelationship to the shoreline. This is significant for two reasons.The first is that the robot must know when to deploy theappropriate locomotive device to suit the medium it is travellingover. This is especially important when the robot has separatepropulsion systems for water and land. The second significance,for understanding exactly where the shoreline exists, is becausethe shoreline position changes from moment to moment. Factorssuch as tide, waves, wake, and natural disasters change theposition of the shoreline constantly and sometimes permanently.Relying on maps and tide tables is not sufficient for a robot toguide itself to the land/water transition and trust the water’s edgewill be where it believes it should be.
Subramanian, et al. [6] have researched an omni-directional,camera setup mounted on an Autonomous Surface Vessel (ASV)that uses a photographic image to differentiate the delineationof water and land. The research found that the shoreline inan image could not be detected from a gray-scale image sincegray-scale does not have the sufficient discrimination details. Acolour image however, did not have this limitation. The self-image of the boat in the centre of the picture frame allows therobot to accurately calculate its distance to shore. Noise andfalse images from waves were able to be filtered out with theuse of a circular median filter. This prototype took two secondsto identify the shoreline from an image.
The robot WhegsTMII [7] is an amphibious, autonomous,biologically inspired robot that is based on the movements ofa cockroach. The name WhegsTM comes from the combinationof the words wheel and legs. It is designed to move through thelittoral zone. The robot uses six, three-spoked appendages whereeach spoke is shaped as a propeller blade to allow for underwaterswimming. At the end of each spoke is a contact pad that allowsfor terrestrial propulsion. The six WhegsTM move in phase sothat a front and rear leg are always in contact with the groundwhile the middle leg on the opposite side is also in contact. Thisproduces a stable tripod gait. The WhegsTM is designed to moveunder the water and along the bottom. The WhegsTMII robotbody is articulated so that it is able to surmount 15 cm (6 inches)high obstacles. The bending action of the robot can be active
2 Copyright c© 2016 by CSME

or passive. When used passively, the weight of the sections ofthe robot keep as many WhegsTM in contact with the ground aspossible. When the articulation joint is used actively, the frontsection of the robot can be powered to rear-up and allow it tosurmount obstacles [8].
The Salamandra Robotica II robot mimics the amphibiousaspects of a salamander’s gait and swim pattern [9]. The Sala-mandra Robotica II has semi-flexible limbs and a rubber foot toallow it to move on land as well as swim on and under the water.In swimming mode, the robot flipper rotates to a close bodyposition and is held in place by a small magnet. This magneticattraction is broken as the appendage is rotated to prepare forwalking again. This tucking of the flipper allows the SalamandraRobotica II to be more streamlined through the water. Forwardmotion through the land and water is made by undulating theeight segments that make up the body in the horizontal plane.Speeds of body undulation in water are two to three times fasterthan that of walking.
The AmphiRobot II is an amphibious robot that uses whatthe design team refers to as “morphological mimicry” [10]. Thisis the facsimile of different biological systems through differentmediums. For speed through the water, the tail of the robot is inthe vertical plane. This mimics a dolphin’s movement throughthe water and allows higher speeds while minimizing the side toside motion. At slower speeds the tail is rotated 90◦ and the robotmoves through the water like a fish. The vertical position of thetail configuration allows for better accuracy in yaw and pitchused in positioning and locomotion. The team utilized a pair ofdriven wheels in the head segment and another pair of wheels inthe aft segment for locomotion on land. In the water, the spokesof the two forward drive wheels are shaped as propellers andused to assist in side thrust movements when turning.
The MLMR II is a segmented robot that replicates the landand in-water movements of a snake [11]. The design team atKyushu Institute of Technology in Japan, applied the kinematicmotion of a snake to an eight segmented robot that is connectedby seven joints. There are seven identical cylinders joined toa single head unit. Underwater the robot can submerge andswim mimicking a snake. It can dive up to 15 m (49 feet) deepdue to its waterproof design. On land the segmented robot canmove using passive wheels and a sinusoidal wriggling motionto propel. The MLMR II is able to travel on land two anda half times faster than under water. Each segment operatesindependently since each unit has its own power supply, motors,motion controllers, and wireless communication module. Datais transferred between segments wirelessly.
III. SYSTEM REQUIREMENTS
The major requirement for the AAR is to have the ability topropel over established canoe routes and through forested areas.The need is to have a robotic system that can negotiate a forestedspace that includes relatively small lakes and rivers. The missiongoal for the robot is to have the ability of traversing competently
through this environment and not become stuck. This design willfacilitate remote wildlife and environmental monitoring.
Due to the environment it is operating in, the robot must beenvironmentally friendly. To achieve this requirement, of notharming the environment that the robot is traversing through,the robot cannot expel any harmful emissions or unnecessarilydamage the foliage/surroundings it is traversing over/through.These emissions would include internal combustion exhaustgasses, noise pollution, battery discharge such as acid and gas,and discharge such as grease. The size and weight of the robotwas kept as small as possible to minimize the impact it has asit navigates through the forest and lakes while remaining largeenough to negotiate a rugged terrain. The robot must be able toclimb slopes of a minimum of 20◦ and traverse obstacles witha 45◦ approach and departure angle. The robot must be able toscale obstacles 33 cm (13 inches) in height with a minimum of49 cm (18 inches) of clearance under the robot, as shown inFigure 2. The AAR must have an easily accessible, emergencystop device so that it can be shut down, in the field, if it poses ahazard to humans or itself.
Figure 2. AAR climbing ramps
A. Target Specifications
The AAR must be designed to accommodate terrain con-sistent with that of Northern Ontario wilderness areas. Typicaltopography of this area in the country includes rock formationsthat are typical of the Canadian Shield, which are: sand dunes,loose gravel, moss/lichen ground cover, tree roots, long grass,swamp/bog, and open water with waves no higher than 61 cm(24 inches).
B. Functional Requirements
The suspension of the robot must be robust enough tosurvive multiple impacts with debris of at least four times theforce of gravity. The bottom of the robot when floating inwater without waves should not allow the water to touch theelectrical enclosure. The robot waterline, when fully loaded,
3 Copyright c© 2016 by CSME

must be lower than the deck of the bow and stern sections of thefloatation section of the hull so that submarining is not possible.The turning radius for the robot must be no more than 1 1
2 ofits length on land and 6 m (236 inches) in the water. The robotmust be able to traverse through multiple mediums includingloose sand, soil, and mud.
C. Physical Requirements
The robot must be able to climb a 20◦ upward slope andhave a centre of mass low enough to allow the robot to be tiltedin any direction of up to 30◦ without overturning. All systemsincluding the drive-train, suspension, chassis, external sensors,waterproof enclosures, servos, actuators, motors, antennae, link-ages, gear assemblies, water propulsion units, and floatationmust be able to sustain continuous underwater immersion fora minimum of 30 minutes.
IV. DESIGN OF THE AAR
In the case of an autonomous robot, resilience and durabilityare key design traits that must be balanced with criteria thatinclude such things as weight, size, power consumption, and thecapability of continuing on the mission after the failure of oneor more subsystems as shown in Figure 3.
Figure 3. AAR components layout (waterproof covers removed)
One of the most difficult environments that an amphibiousrobot must traverse is what is known as the littoral zone. Thisarea tends to have the most difficult obstacles to surmount. Thisarea is often made up of uneven ground, large obstacles such asrocks and logs, and is subject to waves, tidal surge and looseground. A well designed amphibious robot has the ability oftraversing this zone efficiently with both the terrestrial baseddrive and the water based propulsion system. A good design willalso be less prone for these types of drives to become entangledwith debris and resist becoming ensnared. The intention of thisrobot’s design is to have the capability of surmounting land
based obstacles as well as withstanding waves in excess of 61cm (24 inches). The design chosen is to be robust enough tobe energy efficient, corrosion resistant, and waterproof in thecontrols and motor spaces.
Twelve conceptual designs of the AAR were generated withthe chosen design selected utilizing design matrices. A reviewof current literature was performed to identify the researchperformed in this field. For locomotion on land, significantresearch has taken place with the rocker-bogie design. Thisdesign has been utilized by the NASA Mars rovers because ofthe bogies innate ability with its six wheel drive to avoid gettingstuck. The rocker-bogie suspension system also keeps the robotbody flat which is beneficial for keeping the centre of gravitywithin the footprint of the robot. A level robot structure is alsoadvantageous for the power systems within the robot. In thefuture, the AAR will charge the on-board battery system witha hydrogen fuel cell. The manufacturer of the fuel cell selectedfor the project recommends that the fuel cell should operate ona horizontal plane for optimum output since hydrogen is lighterthan air. The AAR is powered using three lithium polymer(LiPo) batteries for the wheel drives, two for the water jet drivesand one for the laptop computer. These six batteries give a totalweight of 5.6 kg (12.4 lbs). Although the batteries are confinedwithin the robot electrical enclosure and the jet drive housing,they are physically restricted from movement with the use ofVelcro c©.
For propulsion over the water, the AAR has had multipledrive systems prototyped, built, and tested to find the mostrobust system for this platform. This testing has included paddlewheels, propellers, voith-schneider cycloidal drive, and water jetdrives. Literature review of testing performed in water litteredwith debris showed that paddle wheels, propellers, and voith-schneider cycloidal drives all had the propensity of becomingentangled and disabled by debris. A dual water jet drive wasselected since no part of the water propulsion system protrudesunder the hull. This reduces the risk for the AAR to becomeentangled on any debris. The water jet system also has a screenon the water intake to filter any debris before it comes in contactwith the impeller. The dual water jet drive system on the AARalso has the ability to be safely run dry, to operate in shallowwater, provide thrust, and tank-style steerage without additionalmoving parts as shown in Figure 4.
For stability and keeping the AAR lightweight, a displace-ment hull made of carbon fibre was chosen. The hull is filledwith closed cell foam for floatation redundancy and reduces thelikelihood of sinking due to a hull breach. The shape of the hullwas chosen based on the proposed in water speed of the robot.A V-shaped prow was selected for multiple reasons. This bowshape promotes traversing in a straight line, it can push debrisout of its path, and will part oncoming waves so that water isdeflected away from splashing up onto the vessel. To protectthe electrical enclosure a watertight lid with snorkel assembly isshown in Figure 5. A watertight lid also encloses the jet drivesection.
4 Copyright c© 2016 by CSME

Figure 4. AAR utilizing dual jet drives
Figure 5. AAR with electrical enclosure cover demonstrating stability in snow
V. TESTING
A. On Land Testing of the AAR
Testing of the AAR in open loop, over land was completedover natural and man-made terrain both inside and outdoors.Indoors, man-made obstacles such as 10 cm (4 inch) high blocksof wood were used to test the AAR’s ability to climb and propelover loose terrain. Outdoor testing included surmounting 60 cm(23.6 inches) high ramps, as shown in Figure 6, to test the AARsability to climb and remain stable at angles of 30◦. The AARhas been tested to have six contact points over uneven terrain,steering within 1 1
2 times the AAR’s length, centre of mass nearthe pivot point of the rocker bogie, a passive suspension system,and the ability to withstand 30◦ inclinations in any directionwithout overturning. Driving the AAR steadily for 500 m (547yards) over mud, sand, concrete, asphalt, grass, ice and snowwas conducted to test the resilience of the drive system. TheAAR was also tested in sub-freezing weather and all systemsperformed without exception as shown in Figure 5.
Figure 6. AAR demonstrating stability on an incline
B. In Water Testing of the AAR
Testing of the AAR in water was performed in open loopand was completed over two days at the Port Whitby Marinaon the North Shore of Lake Ontario. The access to the waterwas strewn with natural flotsam and jetsam and represented atypical littoral zone. The AAR had no difficulty making progressover the driftwood and brush at the waters edge. Once the AARentered the water and progressed deep enough that the wheelsno longer touched the bottom, the buoyancy and stability weretested. The AAR was found to be very evenly balanced with the136 kg (300 lbs) of drive units in the legs giving a low centre ofgravity as designed.
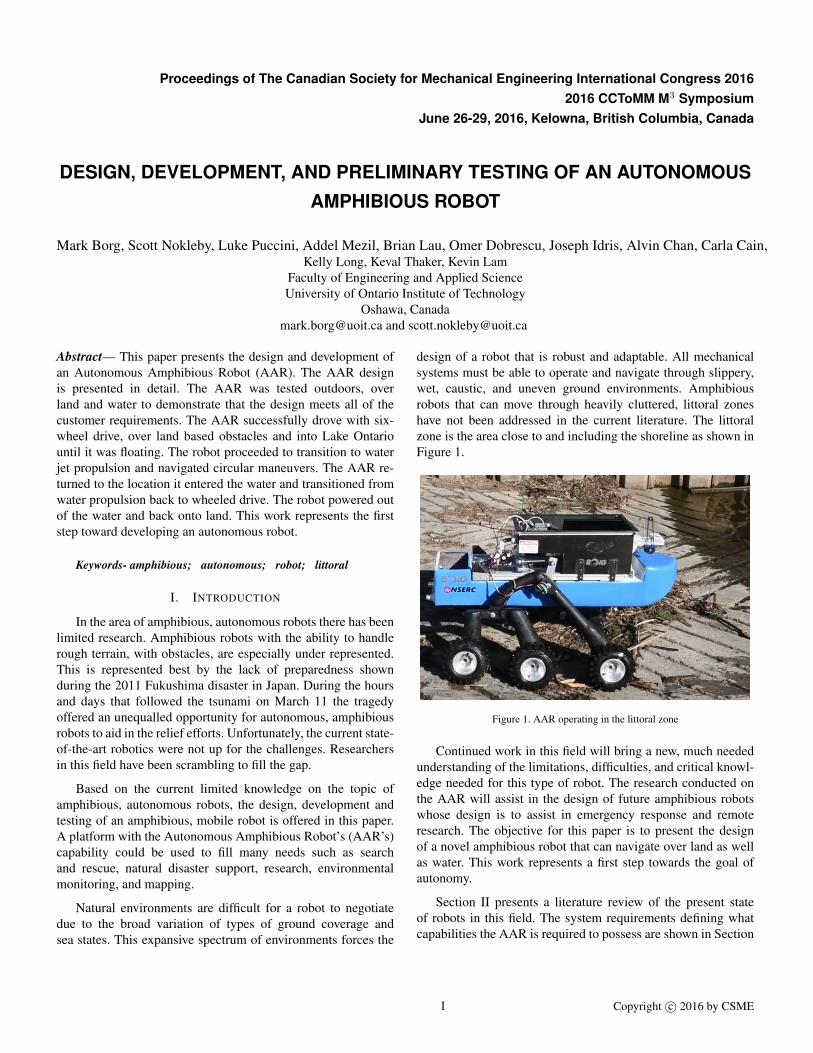
When both the port and starboard water jet drives wereengaged the AAR propelled the AAR smoothly through thewater. By using each water jet drive individually it was possibleto steer the AAR as shown in Figure 7.
C. Water/Land Transition
The AAR has six 33 cm (13 inch) wheels with an aggressivetread pattern that enable the robot to traverse weeds, branches,rubble, and mud. The drives located at each wheel weighs atotal of 136 kg (300 lbs) or 87% of the total weight of therobot. The legs are sealed from the water and enable them toadd 22.7 kg (50 lbs) of flotation. The waterproof nature of thedrives enables the robot to progress into water until the jet drivesare submerged. This allows both the land and water propulsionsystems to work in tandem in the littoral zone as shown in Figure8. The AAR was able to enter and egress the water with nodifficulties.
5 Copyright c© 2016 by CSME
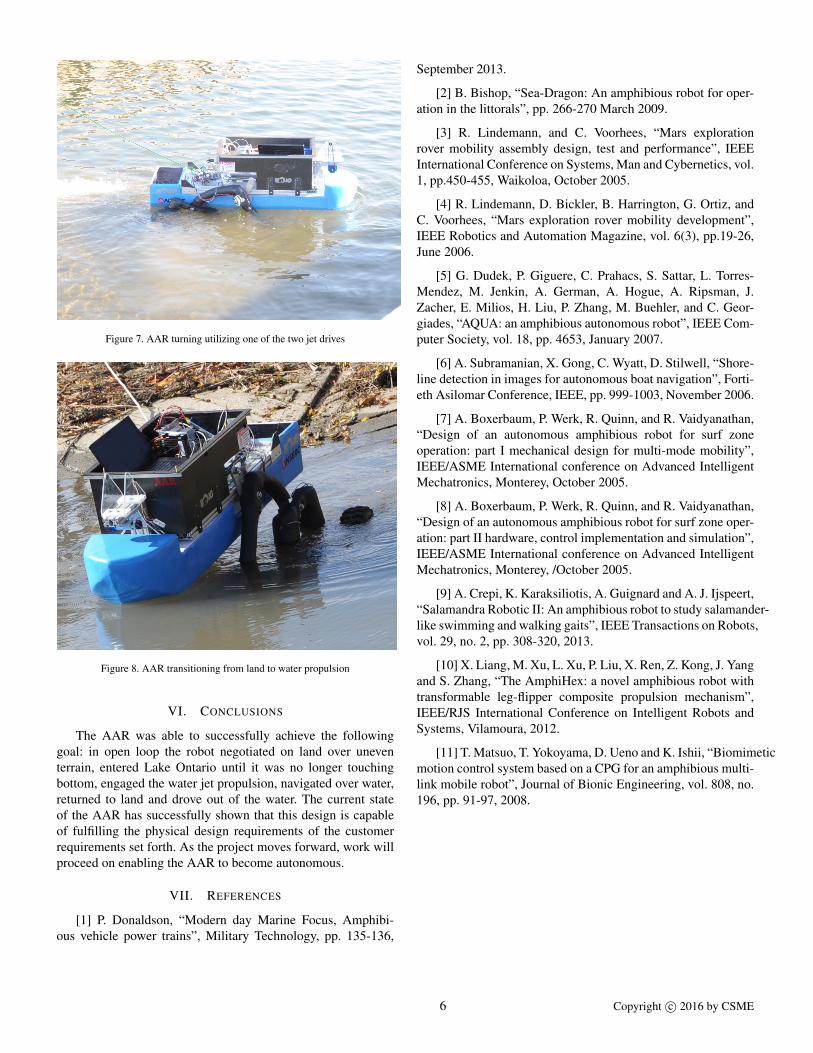
Figure 7. AAR turning utilizing one of the two jet drives
Figure 8. AAR transitioning from land to water propulsion
VI. CONCLUSIONS
The AAR was able to successfully achieve the followinggoal: in open loop the robot negotiated on land over uneventerrain, entered Lake Ontario until it was no longer touchingbottom, engaged the water jet propulsion, navigated over water,returned to land and drove out of the water. The current stateof the AAR has successfully shown that this design is capableof fulfilling the physical design requirements of the customerrequirements set forth. As the project moves forward, work willproceed on enabling the AAR to become autonomous.
VII. REFERENCES
[1] P. Donaldson, “Modern day Marine Focus, Amphibi-ous vehicle power trains”, Military Technology, pp. 135-136,
September 2013.
[2] B. Bishop, “Sea-Dragon: An amphibious robot for oper-ation in the littorals”, pp. 266-270 March 2009.
[3] R. Lindemann, and C. Voorhees, “Mars explorationrover mobility assembly design, test and performance”, IEEEInternational Conference on Systems, Man and Cybernetics, vol.1, pp.450-455, Waikoloa, October 2005.
[4] R. Lindemann, D. Bickler, B. Harrington, G. Ortiz, andC. Voorhees, “Mars exploration rover mobility development”,IEEE Robotics and Automation Magazine, vol. 6(3), pp.19-26,June 2006.
[5] G. Dudek, P. Giguere, C. Prahacs, S. Sattar, L. Torres-Mendez, M. Jenkin, A. German, A. Hogue, A. Ripsman, J.Zacher, E. Milios, H. Liu, P. Zhang, M. Buehler, and C. Geor-giades, “AQUA: an amphibious autonomous robot”, IEEE Com-puter Society, vol. 18, pp. 4653, January 2007.
[6] A. Subramanian, X. Gong, C. Wyatt, D. Stilwell, “Shore-line detection in images for autonomous boat navigation”, Forti-eth Asilomar Conference, IEEE, pp. 999-1003, November 2006.
[7] A. Boxerbaum, P. Werk, R. Quinn, and R. Vaidyanathan,“Design of an autonomous amphibious robot for surf zoneoperation: part I mechanical design for multi-mode mobility”,IEEE/ASME International conference on Advanced IntelligentMechatronics, Monterey, October 2005.
[8] A. Boxerbaum, P. Werk, R. Quinn, and R. Vaidyanathan,“Design of an autonomous amphibious robot for surf zone oper-ation: part II hardware, control implementation and simulation”,IEEE/ASME International conference on Advanced IntelligentMechatronics, Monterey, /October 2005.
[9] A. Crepi, K. Karaksiliotis, A. Guignard and A. J. Ijspeert,“Salamandra Robotic II: An amphibious robot to study salamander-like swimming and walking gaits”, IEEE Transactions on Robots,vol. 29, no. 2, pp. 308-320, 2013.
[10] X. Liang, M. Xu, L. Xu, P. Liu, X. Ren, Z. Kong, J. Yangand S. Zhang, “The AmphiHex: a novel amphibious robot withtransformable leg-flipper composite propulsion mechanism”,IEEE/RJS International Conference on Intelligent Robots andSystems, Vilamoura, 2012.
[11] T. Matsuo, T. Yokoyama, D. Ueno and K. Ishii, “Biomimeticmotion control system based on a CPG for an amphibious multi-link mobile robot”, Journal of Bionic Engineering, vol. 808, no.196, pp. 91-97, 2008.
6 Copyright c© 2016 by CSME