decision making under interval uncertainty – selected ... · decision making under interval...
TRANSCRIPT
Decision making under interval uncertainty –
selected models and algorithms
Jerzy Józefczyk
Division of Intelligent Decision Support Systems Wrocław University of Technology, Wrocław, POLAND
e-mail: [email protected]

City of Wrocław, POLAND

Wrocław 2013
Wrocław University of Technology
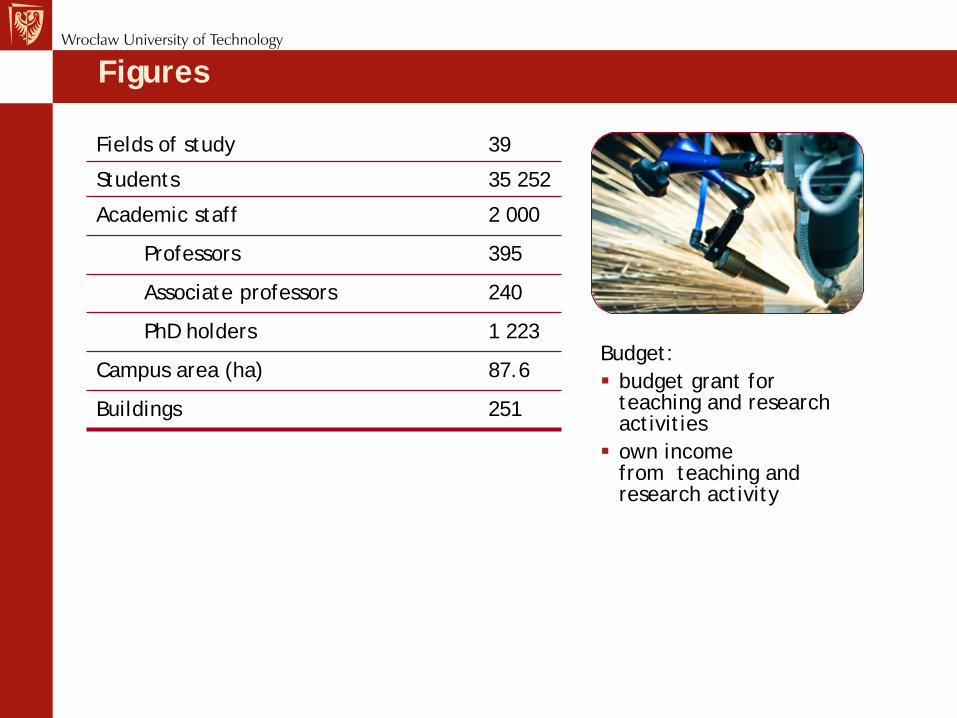
Budget: budget grant for
teaching and research activities own income
from teaching and research activity
Figures
Fields of study 39
Students 35 252
Academic staff 2 000
Professors 395
Associate professors 240
PhD holders 1 223
Campus area (ha) 87.6
Buildings 251

Faculties
Faculty of Architecture Faculty of Civil Engineering Faculty of Chemistry Faculty of Electronics Faculty of Electrical Engineering Faculty of Geoengineering, Mining and Geology Faculty of Environmental Engineering
Faculty of Computer Science and Management Faculty of Mechanical and Power Engineering Faculty of Mechanical Engineering Faculty of Fundamental Problems of Technology Faculty of Microsystems Electronics and Photonics Faculty of Mathematics Regional Branches in Jelenia Góra, Legnica, Wałbrzych

Division of Intelligent Decision Support Systems Problems
Modelling of decision making (management) systems Complex decision making problems Decision making for uncertain systems Big data processing and machine learning
Methods Classic methods of modelling and optimization Methods of computational intelligence Methods of multi-criteria decision making. Methods of uncertain (non-deterministic) knowledge representation, e.g. interval
uncertainty. Applications
Computer systems and networks, e.g. routing, rate control, distribution of data. Complex manufacturing and multi-robot systems, e.g. logistic systems and supply
networks, wireless sensor networks. Biomedical systems.

Content
1. Decision making for input-output plants.
2. Parameter uncertainty and its selected representations.
3. Determinization (substantiation) of evaluation function.
4. Selected decision making problems under interval uncertainty.
a. Time-optimal resource allocation.
b. Task scheduling minimizing the sum of completion times.
c. Task scheduling minimizing the makespan.
d. Permutational flow-shop
5. Final remarks

Decision making for input-output plants
decision u evaluation of decision y
System(Process)
)(u,aFy =
u – decision
– evaluation of the decision u
Special cases of decision making problems
Case A Given: , Find: to fulfil
)(or:)( Yyyyy ∈′=ϕ)(, yF ϕ
)(yϕu′
Case B Given: F, Q, Find to minimise (maximise) Q, i.e. [ ] – optimisation problem
Δ ()(()( u,a)Qu,aFy ==ϕϕ
u′
)(minarg u,aQuUu∈
=′ )(maxarg u,aQuUu∈
=′

Parameter uncertainty and its selected representations (1/2)
It is assumed that set A is the only information on uncertain parameter a.
amaaaaa mk parameterunknownldimensiona–],,...,,,[ T)()()2()1(=
asAa m parameterofvaluesfeasibleofet–R⊆∈
],[ )()(1
kkmk aaA =×=,],,[,particularIn )()()()()( kkkkk aaaaa ≤∈
In discrete case, },...,,,{ )()(2
)(1
)( kn
kkkk
aaaa ∈ }...,,,{ )()(2
)(11
kn
kkmk k
aaaA =×=
A specific realization of parameter a is often called a scenario.
decision evaluation of decision
System(Process)
uu,aF decisiontheofevaluation–)(
//decision– aparameterondependentu
//decisionsfeasibleofset–)( aparameterondependentaU

Parameter uncertainty and its selected representations (2/2)
The most known representations of the uncertainty: • Probabilistic • Fuzzy • Grey • Uncertain variables /credibility • Possibilistic
Bubnicki Z. (2004) Analysis and decision making in uncertain systems. Springer Verlag, Berlin, London, New York. Liu B. (2010) Uncertain Theory. Springer-Verlag Berlin. Li X., Ralescu D. (2008) Credibility Measure of Fuzzy Set and Applications. Proc of IPMU.

Calculation of the evaluation function /in the presence of interval uncertainty/
),(max auFAa∈
),(min auFAa∈
Aggregation of values )(u,aF
),,(min)1(),(max auFauFAaAa ∈∈
−+ ββ ]1,0[∈β
∫A
daauF ),(
The basis for such calculation may be directly evaluation function or any term built on it. Additionally, different operators for aggregation can be used.
)(u,aF
Determinization of the evaluation function (1/8)
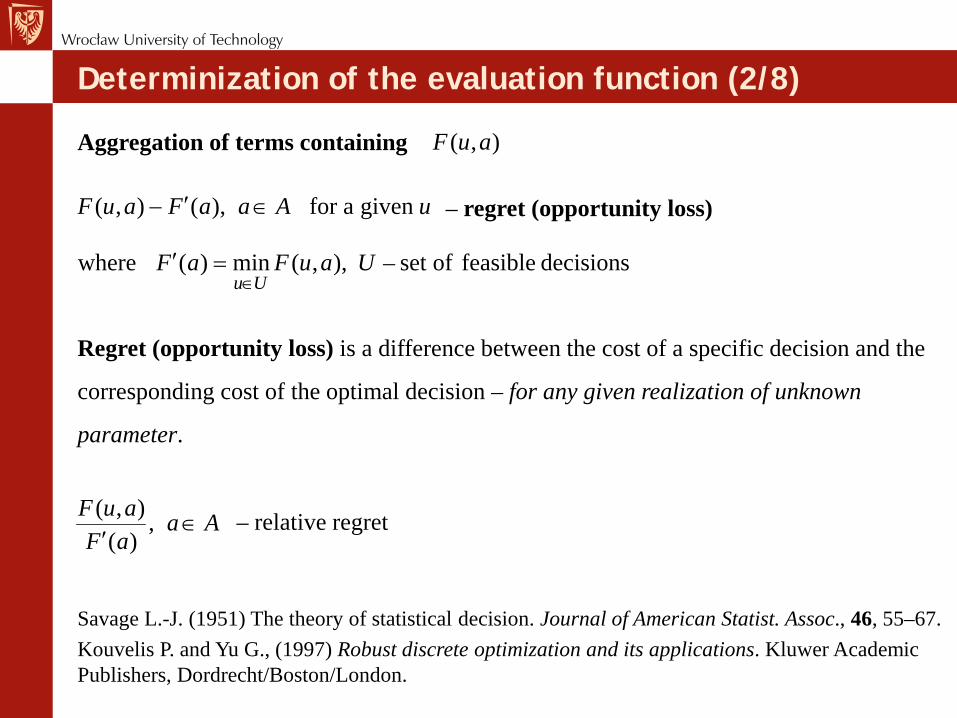
Aggregation of terms containing ),( auF
AaaFauF
∈′
,)(),( – relative regret
uAaaFauF givenafor),(),( ∈′− – regret (opportunity loss)
Regret (opportunity loss) is a difference between the cost of a specific decision and the
corresponding cost of the optimal decision – for any given realization of unknown
parameter.
decisionsfeasibleofset–),,(min)(where UauFaFUu∈
=′
Determinization of the evaluation function (2/8)
Savage L.-J. (1951) The theory of statistical decision. Journal of American Statist. Assoc., 46, 55–67. Kouvelis P. and Yu G., (1997) Robust discrete optimization and its applications. Kluwer Academic Publishers, Dordrecht/Boston/London.

We are interested in decisions acceptable irrespective of a specific scenario a. The notion ’robustness’ is used.
Decision is robust if it is ’good’ or at least ’not so bad’ for all scenarios.
Decision is robust if its realization prevents undesirable or deteriorating behavior of decision object.
Determinization of the evaluation function (3/8)

Due to uncertain a we do not seek for optimal decisions.
decisionoptimal––)()(),( paUupaFauF ∈→<′−
decisionsoptimal–all–})(),(:)({)( ppaFauFaUuaU p ofset<′−∈=
)(and,)(),( aUupaFauF pAa
Aa∈
∈ ∈<′−∀
If we require the inequality for all scenarios, we have p-robust decision /used mainly for discrete A/.
In general, the set of p-robust decisions can be obtained:
})(),(:{ paFauFUuU Aap ≤′−∀∈= ∈
The solution is close to the optimal one for all scenarios.
Determinization of the evaluation function (4/8)
p-robustness
Determinization of the evaluation function (5/8)
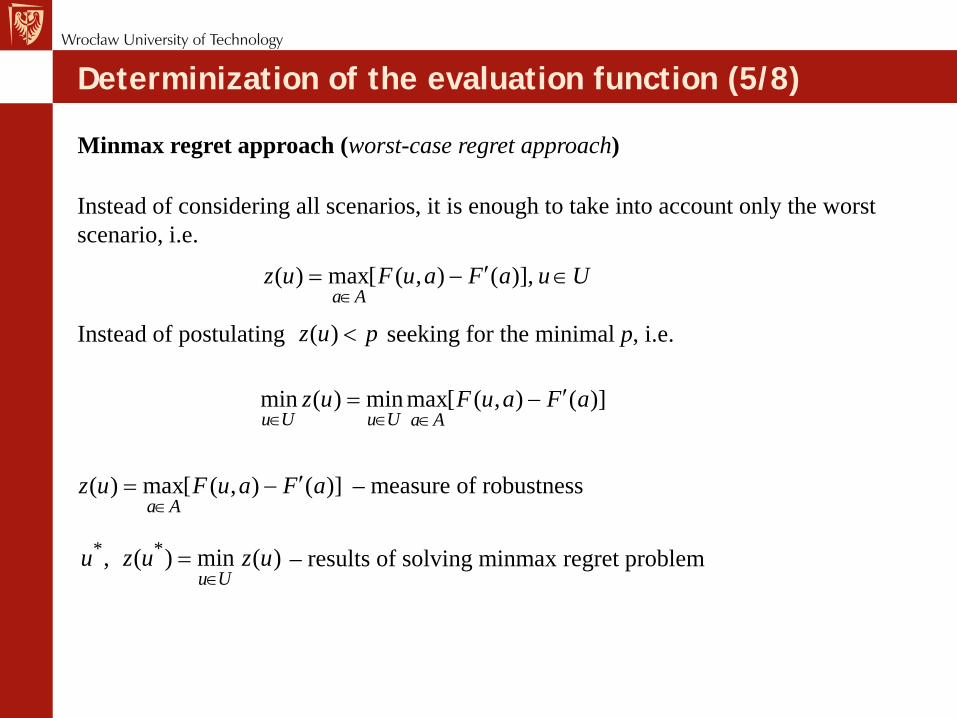
Instead of considering all scenarios, it is enough to take into account only the worst scenario, i.e.
UuaFauFuzAa
∈′−=∈
)],(),([max)(
Minmax regret approach (worst-case regret approach)
Instead of postulating seeking for the minimal p, i.e. puz <)(
)](),([maxmin)(min aFauFuzAaUuUu
′−=∈∈∈
)](),([max)( aFauFuzAa
′−=∈
– measure of robustness
)(min)(, ** uzuzuUu∈
= – results of solving minmax regret problem

Other measures of robustness are encountered in literature.
(b,w) – robustness, parametric robustness, used for discrete A /proposed by B. Roy/,
b, w – non-negative parameters )( wb <
Determinization of the evaluation function (6/8)
Robust decision maximizes the number of scenarios for which the value of evaluation (e.g. the value of regret) does not exceed b as well as this value for all scenarios does not exceed w.
scenariosallofnumber–)],(),(([max 1 NaFauFb iiNiUu
′−−∑ =∈1
NiwauF i ...,,2,1,),(.t.s =≤

Lexicographic – robustness, parametric robustness, used for discrete A α
Non-increasing sequence of the evaluation function values is determined for all scenarios, i.e.:
scenariosallofnumber–,1...,,2,1),,(),( 1 NNiauFauF ii −=≥ +
})(),(:{)(~ αα ≤′−∀∈= ≤ jjnj aFauFUuU
Set of – robust lexicographic decisions is derived. α
Lexicographic – robustness implies p-robustness but not vice versa. α
Determinization of the evaluation function (7/8)
Determinization of the evaluation function (8/8)
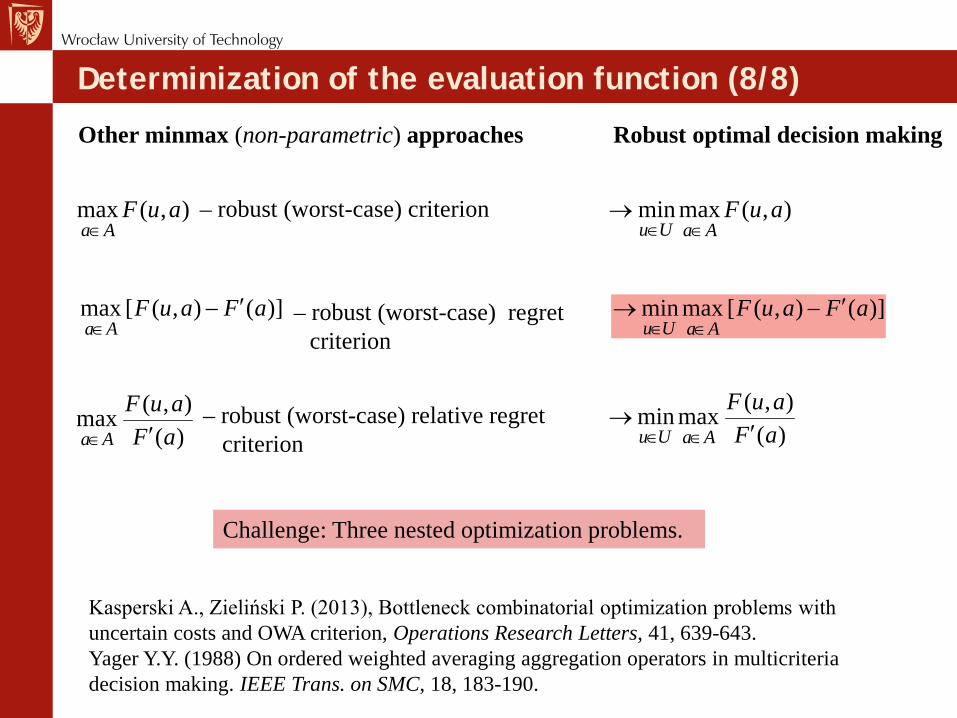
Other minmax (non-parametric) approaches Robust optimal decision making
),(max auFAa∈
– robust (worst-case) criterion ),(maxmin auFAaUu ∈∈
→
)(),(max
aFauF
Aa ′∈– robust (worst-case) relative regret
criterion )(),(maxmin
aFauF
AaUu ′→
∈∈
Challenge: Three nested optimization problems.
– robust (worst-case) regret criterion
)](),([max aFauFAa
′−∈
)](),([maxmin aFauFAaUu
′−→∈∈
Kasperski A., Zieliński P. (2013), Bottleneck combinatorial optimization problems with uncertain costs and OWA criterion, Operations Research Letters, 41, 639-643. Yager Y.Y. (1988) On ordered weighted averaging aggregation operators in multicriteria decision making. IEEE Trans. on SMC, 18, 183-190.

Special case of continuous functions of the form iini
uaauF,...,2,1
max),(=
=
u F(u,a) where...,,2,1,1 nicp
Tii
i ==
0>ip – parameters / /
C – global amount of resources ,0:]...,,,[{ T21c ≥== ∆
in cccccD Ccni ni i ≤= ∑ =1,...,,2,1
where1max),(,...,2,1 iini cp
cpQ=
= T21 ]...,,,[ Ipppp =
ii
ii c
up
a 1,1==
Deterministic time optimal resource allocation problem )(min)(),(c
Δ' p,cQpQ'cpQDc∈
==
Time-optimal resource allocation (1/5)
,...,,2,1,1
1
1
' Ii
p
pCc I
m m
ii ==
∑=
∑=
=′I
m mpCpQ
1
11)(Analytical solution:

,]...,,...,,,[],,[ T21 niiii pppppppp =∈ ××=∈ ],[],[ 2211 ppppp P ],[... nn pp×
−= ∑
==∈
I
m mii,...,niPp pCcpcz
12,1
111maxmax)(
.11max1111max111max)( 111
−
−=
−−=
−= ∑∑∑
≠=∈≠
=∈=∈
n
smm
mss
sPp
n
smm
msssPp
nm
mssPp pCCcpcC
pCCpcppCcpcz
Let us find such an index s that . Then is,cpup iiss
≠≥11
It is easy to see that is the worst scenario and T1 ]...,,...,,[ ns
c pppp =
,1111)(1)( 1w
+−=′−= ∑
≠=
n
smm
msssss ppCcppQ
cpcz
Time-optimal resource allocation (2/5)
Averbakh I. (2000) Minimax regret solutions for minimax optimization problems with uncertainty. Operations Research Letters, 27, 57–65. Józefczyk J. (2008) Worst-case allocation algorithms in a complex of operations with interval parameters. Kybernetes, 37, 652-676.

Theorem. The solution of the uncertain time-optimal resource allocation problem is optimal if and only if the conditions
Ccni i =∑ =1
*
isnscpcp ssii
≠== ,...,,2,1,11**
are fulfilled, and s is the longest lasting operation.
*c
Time-optimal resource allocation (3/5)

1. Calculate and find index s and such that
2. Determine .
The optimal resource allocation for operations is as follows: *c si...,n,,,i ≠= 21
∑≠=+
=n
smm
ms
ii
pp
pCc
1
*11
1
*sc
.ˆmax*i
is cc =
(A)
sin,...,,,i, ≠= 21
The optimal value of the absolute regret . ∑≠=
−= n
smm
mms
msms
ppppppp
Ccz 1
* 1)(
ni
pp
pCcn
smm
mi
ii ...,,2,1,11
1
ˆ1
=+
=∑
≠=
Time-optimal resource allocation (4/5)
Optimal polynomial solution algorithm

],4,2[2 ∈p
Step 1. ,4
21
31
31
1011
1
ˆ
21
11 =
+=
+=
pp
pCc
Step 2. 6*2 =c
Moreover,
,2
11
41
41
1011
1
ˆ
12
22 =
+=
+=
pp
pCc
Therefore, s = 1, and
Time-optimal resource allocation (5/5)
Numerical example: ],3,1[,2 1∈= pn )10(1021 ==+ Ccc
.4*1 =c
.81)( * =cz

Task scheduling minimizing the sum of completion times (1/5)
7/23
}...,,,,,{= 21 nj JJJJ J – set of n tasks
}...,,,,,{= 21 mi MMMM M – set of m machines (executors)
njmijipp
,...,2,1,...,2,1, ][
=== – matrix of task execution times
nkjmiikjxx
,1,,1,, ][∈
∈=
=otherwise,0
machinethbyendthefromththeasperformedistaskth,1,,
ikjx ikj
onceexecutedbemusttaskeach–,1,11 1 ,, njxmi
nk ikj ==∑ ∑= =
momenttimeeveryat
taskonemostatperformecanmachineeach–,1,,1,11 ,,∑ ===≤n
j ikj njmix
∑ ∑ ∑= = −= nj
mi
nk ikjji xpkxpF 1 1 1 ,,,1 ),(
∑≤≤ jjijiji CpppR || ,,, – notation of the problem

Problem formulation (deterministic version): Given: J, M, p Find: the optimal schedule , i.e. x′
∑ ∑ ∑= = −==′=′ nj
mi
nk ikjji
xxxpkxpFxpFpF 1 1 1 ,,,111 min),(min),()( Δ
Task scheduling minimizing the sum of completion times (2/5)

Problem formulation (uncertain version): Given: J, M, p Find: the optimal schedule , i.e. *x
xppFxpFpFxpFxz xxxp
forscenarioworstthe–where),(),()](),([max)( 11111 ′−=′−=∈P
)(min)( 1*
1*
1 xzxzzx
==∆
– evaluation function (robust regret criterion)
jijijijiji ppppp ,,,,, ],,[ ≤∈ – interval execution times
],[...],[ ,,,1,1 nmnmji ppppp ××=∈P
)(),( 11 pFxpF ′− – regret
)](),([max)( 111 pFxpFxzp
′−=∈P
Task scheduling minimizing the sum of completion times (3/5)

Important results:
• Reducing the calculation of the worst scenario to the weighted bipartite matching problem solved polynomially by the Hungarian algorithm.
• Proofing of the 2-approximate property for the mid-point scenario (MIH).
• Elaboration and experimental evaluation of heuristic Scatter Search (SS) algorithm.
9/23
2,,MIH
,jiji
jipp
p+
= – the mid-point scenario ).(2)( *1
MIH1 xzxz ≤→
Task scheduling minimizing the sum of completion times (4/5)
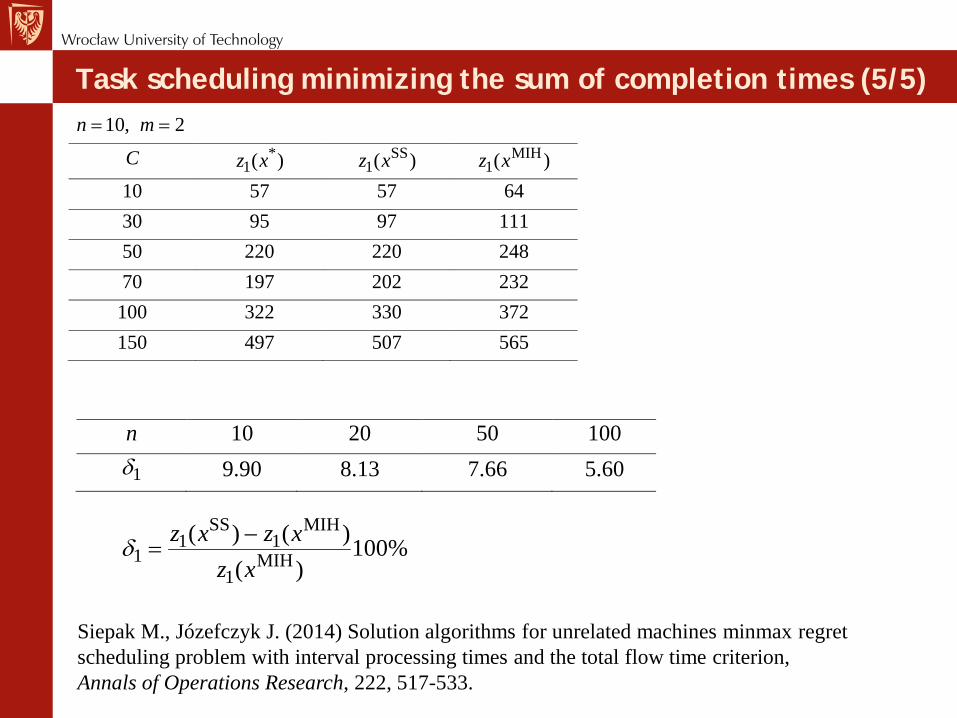
2,10 == mn
C )( *1 xz )( SS
1 xz )( MIH1 xz
10 57 57 64 30 95 97 111 50 220 220 248 70 197 202 232
100 322 330 372 150 497 507 565
%100)(
)()(MIH
1
MIH1
SS1
1 xzxzxz −
=δ
n 10 20 50 100
1δ 9.90 8.13 7.66 5.60
Task scheduling minimizing the sum of completion times (5/5)
Siepak M., Józefczyk J. (2014) Solution algorithms for unrelated machines minmax regret scheduling problem with interval processing times and the total flow time criterion, Annals of Operations Research, 222, 517-533.

}...,,,,,{= 21 nj JJJJ J – set of n tasks
}...,,,,,{= 21 mi MMMM M – set of m machines (executors)
njjpp ,...,2,1][ == – vector of execution times
=otherwise,0
machinethbyperformedistaskth,1,
ijc ij
njmiijcc
,...,2,1,...,2,1, ][
===
onceexecutedbemusttaskeach–,1,11 , njcmi ij ==∑ =
∑ == nj ijj
icpcpC 1 ,max max),(
Problem formulation (deterministic version): Given: J, M, p Find: the optimal schedule , i.e. c′
∑ ===′=′ nj ijj
icccpcpCcpCpC 1 ,maxmaxmax maxmin),(min),()( Δ
Task scheduling minimizing the makespan (1/4)
max,,, || CpppR jijiji ≤≤ – notation of the problem

– evaluation function (robust regret criterion)
jjjjj ppppp ≤∈ ],,[ – interval execution times
],[...],[ 11 nn ppppp ××=∈P
)(),( maxmax pCcpC ′− – regret
)](),([max)( maxmax2 pCcpCczp
′−=∈P
Problem formulation (uncertain version): Given: J, M, p Find: the optimal schedule , i.e. *c
cp
pCxpCpCcpCcz
c
ccp
forscenarioworstthe–where
)(),()](),([max)( maxmaxmaxmax2 ′−=′−=∈P
)(min)( 2*
2*
2 czczzc
==∆
Task scheduling minimizing the makespan (2/4)
15/23
Important results:
• Determination of the algorithm for calculating of lower and upper bounds of for a given c.
• Development of heuristic algorithms (SS-based and MIH) as well as their experimental evaluation /lack of any approximate algorithm/.
)(2 cz
Task scheduling minimizing the makespan (3/4)

%100)(
)()(MIH
2
MIH2
SS2
2 czczcz −
=δ
2,10 == mn
C )( *2 cz )( SS
2 xz )( MIH2 xz
10 4 4 6 30 21 21 31 50 38 40 58 70 56 56 75
100 114 119 155 150 135 136 195
n 10 20 50 100
2δ 44.60 27.48 19.19 9.77
Task scheduling minimizing the makespan (4/4)
Józefczyk J., Siepak M., (2011) Minmax regret algorithms for uncertain P| | Cmax problem with interval processing times. In: H. Selvaraj and D. Zydek, eds. Proc. of 21st Int. Conf. On Systems Engineering, Las Vegas USA, IEEE Computer Society, Los Alamitos, 115-119.

Permutational flow-shop problem (1/8)
General scheme of the flow-shop problem (tasks move along stationary executors)
M1set of tasks M2 Mm
}...,,,,,{= 21 nj JJJJ J – set of n tasks
}...,,,,,{= 21 mi MMMM M – set of m machines (executors)
),,,( ,,2,1 jmjjj OOOJ = – operations for jth task
njmijipp
,...,2,1,...,2,1, ][
=== – matrix of operation execution times
Π∈= )...,,...,,,( 21 nj πππππ – permutation of tasks (decision) where
},...,,21{ n,j ∈π }},...,,2,1{,,:{ kjnkjkj ≠∈≠= πππΠ

Evaluation function (criterion)
where),,(),( ,max ππ π pCpCnm=
njppC jk kj
...,,2,1for,=),( 1 ,1,1 =∑ = ππ π
mippC ik ki ...,,2,1for,=),( 1 ,, 11
=∑ = ππ π
njmipCpCppCjjjj iiii ...,,2,1,...,,2,1for],),(,),(max[=),(
1,,1,, ==+−− πππ ππππ
Problem formulation: Given: J, M, p Find: the optimal permutation , i.e. π ′
),(min),()( maxmaxmax πππ
pCpCpCΠ∈
=′=′ ∆
Permutational flow-shop problem (2/8)

– evaluation function (robust regret criterion)
jijijijiji ppppp ,,,,, ],,[ ≤∈ – interval execution times
],[...],[ ,,,1,1 nmnmji ppppp ××=∈P
)(),( maxmax pCpC ′−π – regret
)](),([max)( maxmax3 pCpCzp
′−=∈
ππP
Problem formulation: Given: J, M, Find: the optimal permutation , i.e.
njmipp jiji ...,,2,1,...,,2,1,, ,, ==∗π
)])(),([max(min)( maxmax*
3 pCpCzp
′−=∈∈
πππ PΠ
This problem is at least NP-hard. Moreover, three nested optimizations.
Permutational flow-shop problem (3/8)

Case of two machines m = 2
Uncertain flow-shop is NP-hard.
Theorem. For mid-point scenario , 2
,,MIH,
jijiji
ppp
+=
).(2)( *3
MIH3 ππ zz ≤
Permutational flow-shop problem (4/8)

))((min)]),(min),([max(min 3maxmax πσππσπ
zpCpCp ΠΠΠ ∈∈∈∈
=−P
Worst-case scenario analysis (maximization)
It is easy to justify that /extreme scenarios only/ jijijiji ppppji ,,,,:, =∨=∀
mn2 – number of all scenarios )!1()!1(
)!2(−−
−+nm
nm– number of scenarios to check
Inner minimization
– lower bound of )(πz)),(),((max)( NEHmaxmax,3 σππ pCpCz
pLB −=
∈P
))(),((max)( max,max,3 pCpCz LBp
UB −=∈
ππP
– upper bound of where
++= ∑∑∑
+=≠==
−
===
m
kili
jlnl
n
jjk
k
iji
njmkLB ppppC
1,
,11,
1
1,
,1,1max, minminmax)(
)(πz
Permutational flow-shop problem (5/8)

Representation of a feasible solution (chromosome): Sequence of numbers from 1 to n.
Fitness function: )(,3 πUBz
Initial population: 10 random permutations + solution determined by constructive MIH algorithm and its 9 random versions.
Crossover: Order crossover operator (Goldberg) giving feasible offsprings.
Mutation: Two random genes are swapped.
Selection: The current population is sorted non-increasingly. First two chromosomes are removed from the list and the result of their crossover is added to the new population. The process is repeated until the list is empty.
Permutational flow-shop problem (6/8)

],0(, Kp ji ∈ ],[ ,,, Cppp jijiji +∈
Middle interval heuristic (MIH) Application od NEH constructive algorithm for
2,,MIH
,jiji
jipp
p+
=
n . n .
30
50
70
90
110
130
150
6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25
Average upper and lower bounds of z returned by MIH heuristic (triangles) and EVO algorithm (dots) for different values of n.
Permutational flow-shop problem (7/8)

0
50
100
150
200
250
300
350
10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200
Average upper and lower bounds of z returned by MIH heuristic (triangles) and EVO algorithm (dots) for different values of C.
Permutational flow-shop problem (8/8)
Józefczyk J., Siepak M., (2013) Scatter Searcg based algorithms for min-max regret task scheduling problems with interval uncertainty, Control and Cybernetics, 42, 667-698. Józefczyk J., Siepak M., (2013) Worst-case regret algorithms for selected optimization problems with interval uncertainty, Kybernetes, 43, 371-382.

Final remarks (1/2)
Current work: • Considering of multi-criteria problems Ehrgott M., Ide J., Schoebel A. (2014) Minmax robustness for multi-objective optimization problems, European Journal of Operational Research, 239, 17-31.
• Investigation of computational complexity and seeking for approximate algorithms for basic problems
Kasperski A., Kurpisz A., Zieliński P. (2014) Approximability of the robust representatives selection problem Operations Research Letters, DOI: 10.1016/j.orl.2014.10.007 • Developing of heuristic algorithms for problem instances more close to
real-world applications Ćwik M., Józefczyk J. (2015) Evolutionary algorithm for minmax regret flow-shop problem, Management and Production Engineering Review 6(3), 3–9. Averbakh I., Pereira J. (2011) Exact and heuristic algorithms for the interval data robust assignment problem. Computers & Operations Research, 38,1153-1163. Kasperski A., Makuchowski M., Zieliński P. (2012) A tabu search algorithm for the minmax regret minimum spanning tree problem with interval data, Journal of Heuristics, 18(4), 593-625.

Applications Non-repetitive and unique processes (systems) as well as non-available and(or) non-existing) historical data.
Final remarks (2/2)
Example Producing of software by small/medium computer company: Tasks: specific programming activities with changing execution times. Aim: Minimization of the total execution time.