decentralized path planning for multi-agent teams in ... filevishnu r. desarajuand jonathan p. how...
TRANSCRIPT
VISHNU R . DESARAJU AND JONATHAN P . HOW
DEPARTMENT OF AERONAUTICS AND ASTRONAUTICS
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
ICRA 2011
AUTONOMOUS ROBOTS 2012
PRESENTED BY: RAJ DASGUPTA
Decentralized Path Planning for Multi-Agent Teams in Complex Environments using Rapidly-exploring Random Trees
Overview
� Path planning in multi-robot (agent) system
� Sampling-based planner
� New algorithm called DMA-RRT proposed
� Includes coordination strategy based on token ring passing between robots
� Extension to basic algorithm called Cooperative DMA-RRT allows agents to update each other’s plans
� Verified experimentally through simulations and on iRobot Create platform
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
2

Problem Addressed
� Plan a collision free path for multiple agents
� Constraints
� Complex environment
� Agents (called a team) should not collide with each other
� Static or linear paths cannot be used - requires paths to be dynamically updated
� Centralized planning cannot be used
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
3

Related Work: Robot Path Planning
� Dynamic path planning using constraint solvers scale poorly in number of constraints
� Mixed Integer Linear Programming (MILP)
� Model Predictive Control (MPC)
� Potential field based planning – works for simple environments only
� Sampling-based methods
� Probabilistic Roadmap Planners (PRM)
� Rapidly-exploring Random Trees (RRT)
� Extension called closed loop RRT (CL-RRT) used as basis of work
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
4

Related Work: Robot Coordination
� Agents must reach consensus on updated path before moving (Scerri et al.)� Synchronization of plans causes delay
� Agents reserve regions of map that they will move into and must reach consensus about changes to those regions (Purvin et al.)� Asynchronous planning allowed, but some tradeoff due to working with large areas instead of paths
� Reachability-based collision avoidance considers non-cooperating agents (worst case scenario)
� Decentralized MPC (Trodden and Richards): Agents allowed to update plans sequentially in pre-determined order - solves synchronization issues; fixed order makes it inefficient
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
5
CL-RRT Algorithm
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
6
� Generates a set of feasible paths � Satisfying current path constraints
� Selects least cost path from set
� Not guaranteed to be optimal
� Fast (faster than comparable path planner RRT*)
� Verified successfully on robots in DARPA Grand Challenge 2007
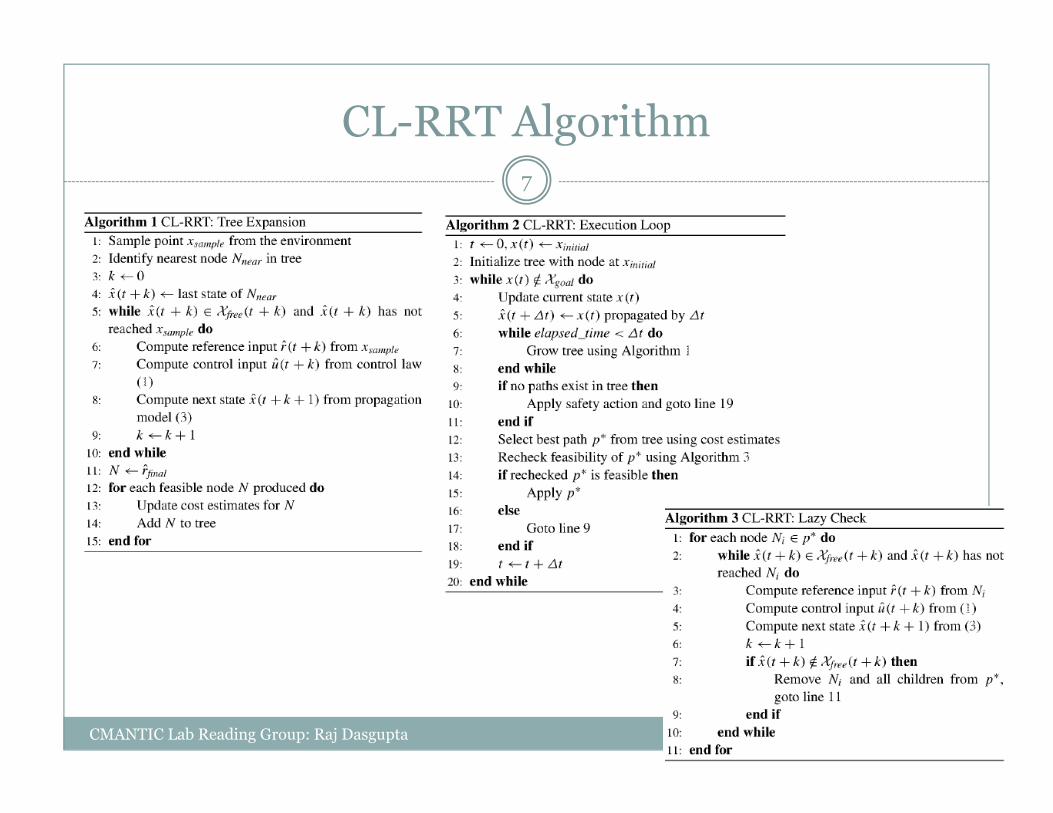
� Three phases� Tree expansion
� Execution loop
� Lazy check for feasibility
CL-RRT Algorithm
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
7
Multi-agent CL-RRT
� Naïve approach: Every agent plans its path subject to constraints imposed by other agents� Problem: Inefficiency
� A1 calculates its plan and sends to A2 as set of constraints
� A2 starts calculating its plan using A1’s constraints
� A1 updates its plan and corresponding set of constraints
� A2 finishes plan with old set of A1’s constraints; sees A1 has new constraints; replans…
� More complicated and inefficient with more agents
� CL-RRT can fail (cause collisions) when used by multiple agents with inter-dependent path constraints plan simultaneously
� Needs coordination protocol
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
8

Coordination Protocol: Merit-based Token Passing
� Basis: (Trodden and Richards, ACC 2006)� Sequential order imposed among agents � In each iteration only one agent can update its plan
� Merit-based Token Passing� Remove sequential order by introducing a token� Agent that has token can update its plan� Each agent without token calculates metric called Potential Path Improvement (PPI) � PPI = difference in cost between best path in RRT and current path
� Broadcasts PPI to all other agents� In next round token goes to agent with highest PPI from last round; ties broken at random
� Advantages: � Agent that benefits most from re-planning is given next chance to replan� Agents that can quickly find path to goal get token first without waiting in a sequential order
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
9
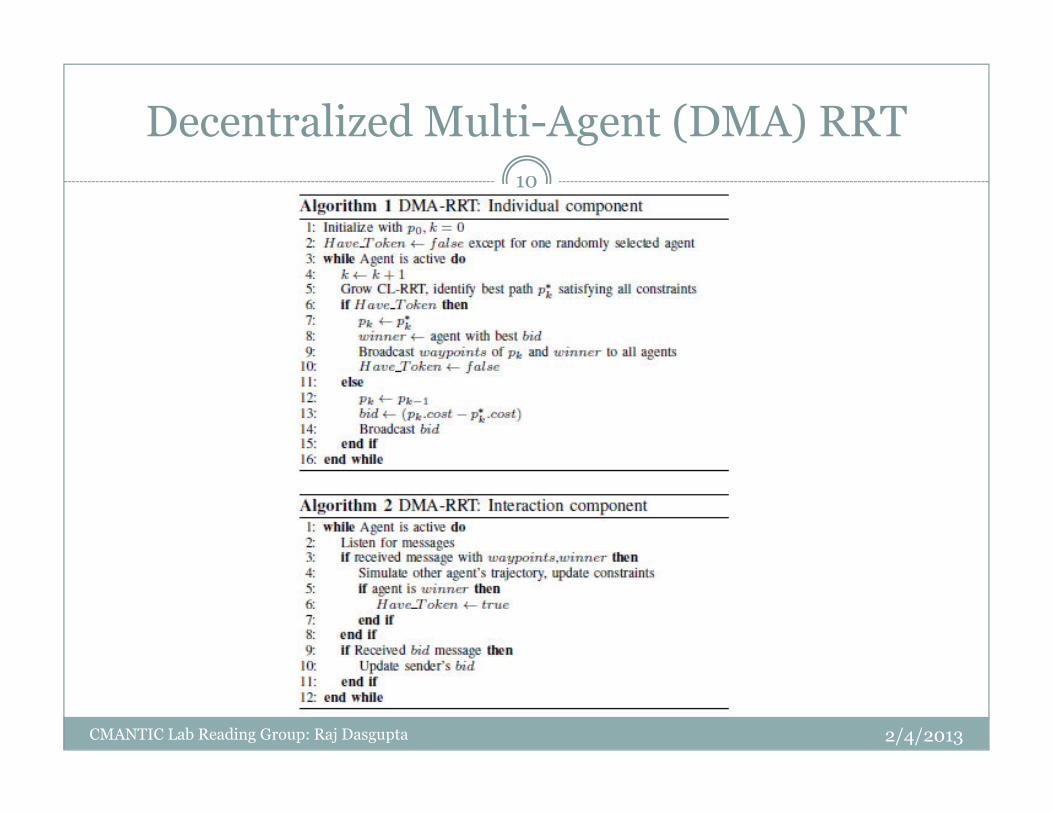
Decentralized Multi-Agent (DMA) RRT
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
10
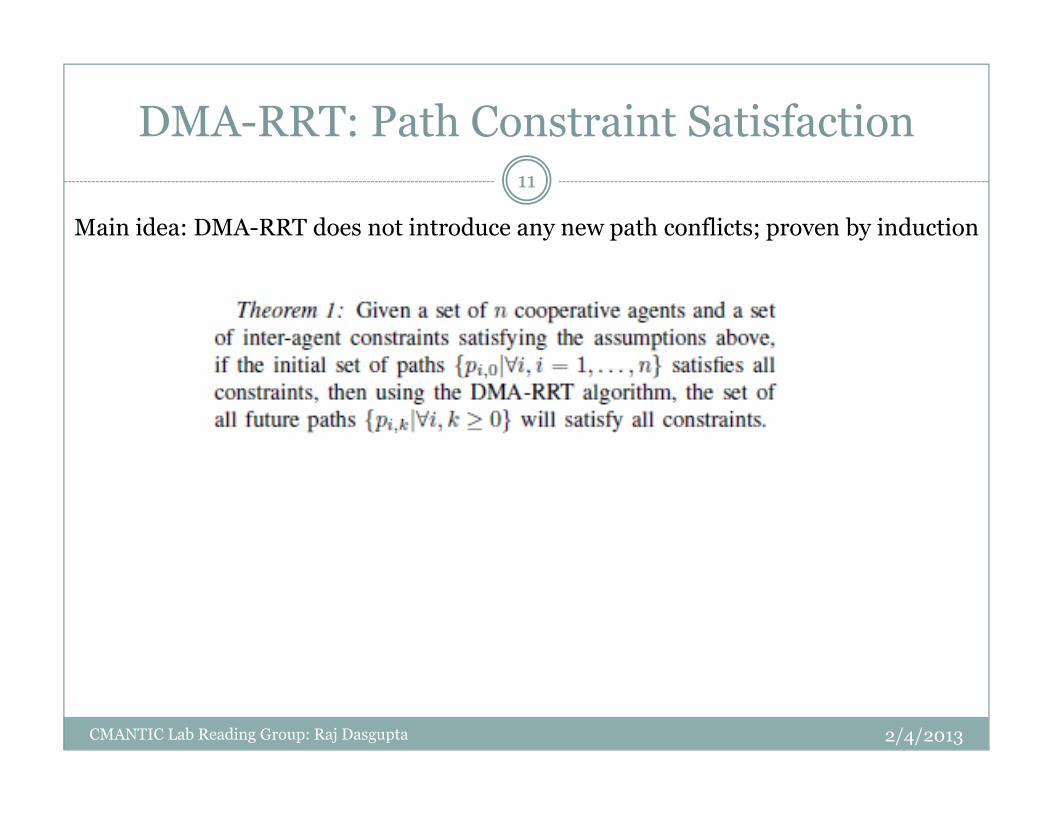
DMA-RRT: Path Constraint Satisfaction
Main idea: DMA-RRT does not introduce any new path conflicts; proven by induction
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
11

DMA-RRT: Merit-based token passing
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
12

DMA-RRT vs. Cooperative DMA-RRT
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
13
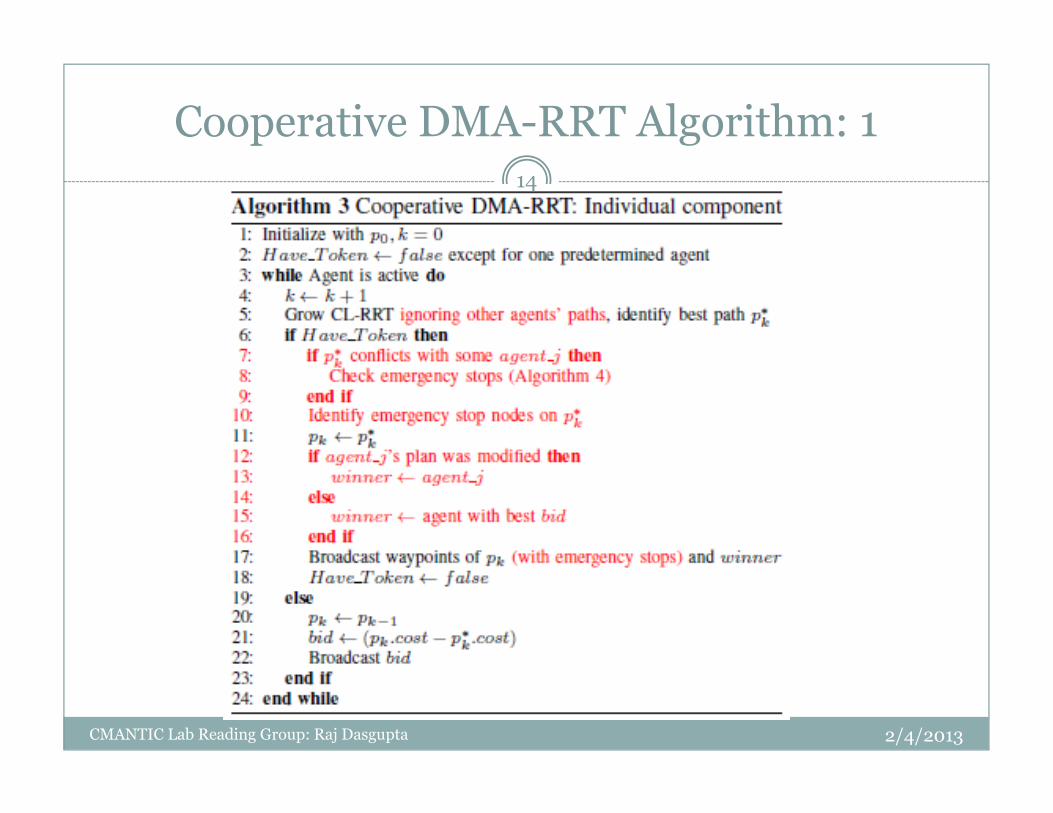
Cooperative DMA-RRT Algorithm: 1
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
14

Cooperative DMA-RRT Algorithm: 2
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
15
Experimental Results
� Simulations:
� Each agent simulated on 1 desktop (2.13 GHz, 1 GB RAM)
� 10 desktops connected by LAN
� Two wheel skid steer robot model
� Path cost=Travel time along path
� Physical robot experiments
� iRobot Create
� Pure pursuit controller used to determine robot velocity
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
16

Simulation Results: Open Map, 10 Agents
� No obstacle environment with 10 goals (waypoints)
� Agents cycle through goals for 10 mins (results avg. over 12 trials)
� Fig. 2(b) shows agent 1’s view of other agents trajectories (obstacles) with round robin sched.
� Legends:� Blue circle/red arrow : agent 1� Yellow circle/blue arrow: other agents� Magenta dots: waypoints for agent 1’s path
� Red: current position of other agent� Green: future position (+10 sec.) other agent
� Red-green: time parameterized obstacles presented by other agents’ paths
Round-robin scheduling: 12.5 goals/agent in 10 mins.Merit-based scheduling: 15.1 goals /agent in 10 minsImprovement because agent that finds a shorter (better) path to goal does not have to wait for all other agents to finish their turn before it gets token and can replan2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
17

Simulation Results: Open Map – Replan Times
� Round-robin gives regular replan start times (uniformly spaced dots in Fig. 3 (a))
� Merit-based gives task-driven replan start times (non-uniformly spaced dots in Fig. 3 (b))
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
18
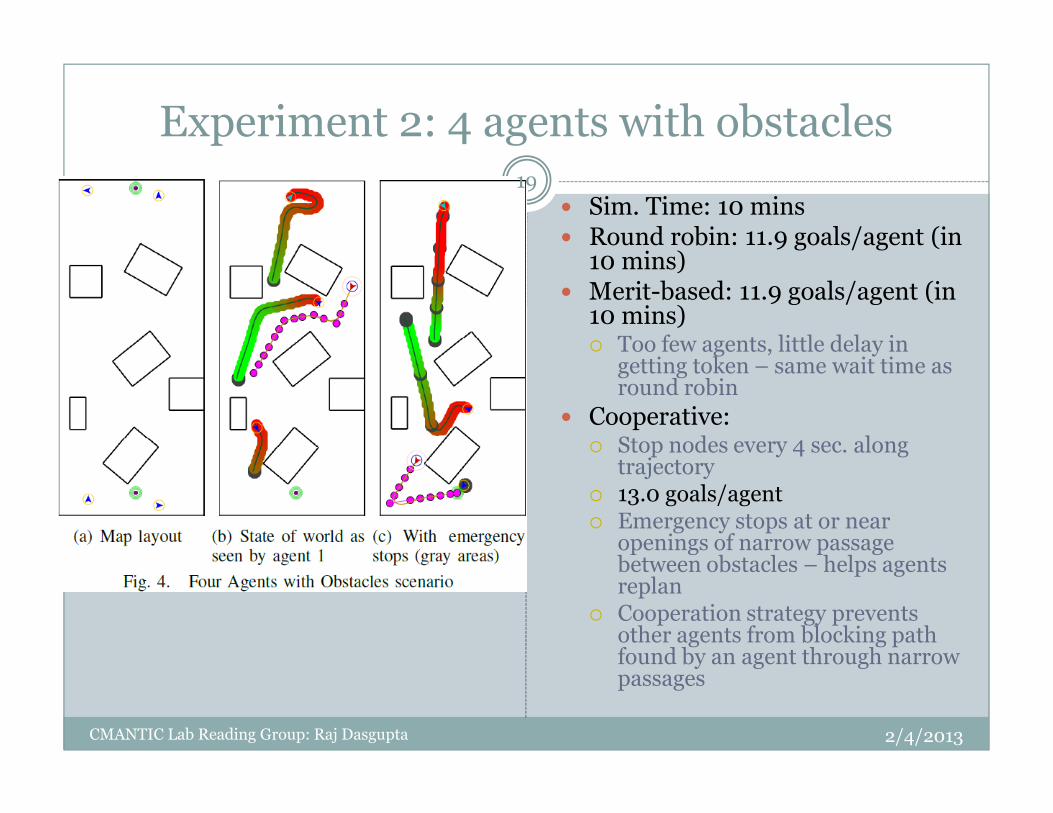
Experiment 2: 4 agents with obstacles
� Sim. Time: 10 mins� Round robin: 11.9 goals/agent (in 10 mins)
� Merit-based: 11.9 goals/agent (in 10 mins)� Too few agents, little delay in getting token – same wait time as round robin
� Cooperative: � Stop nodes every 4 sec. along trajectory
� 13.0 goals/agent� Emergency stops at or near openings of narrow passage between obstacles – helps agents replan
� Cooperation strategy prevents other agents from blocking path found by an agent through narrow passages
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
19

Experiment 3: Open map, physical robots
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
20
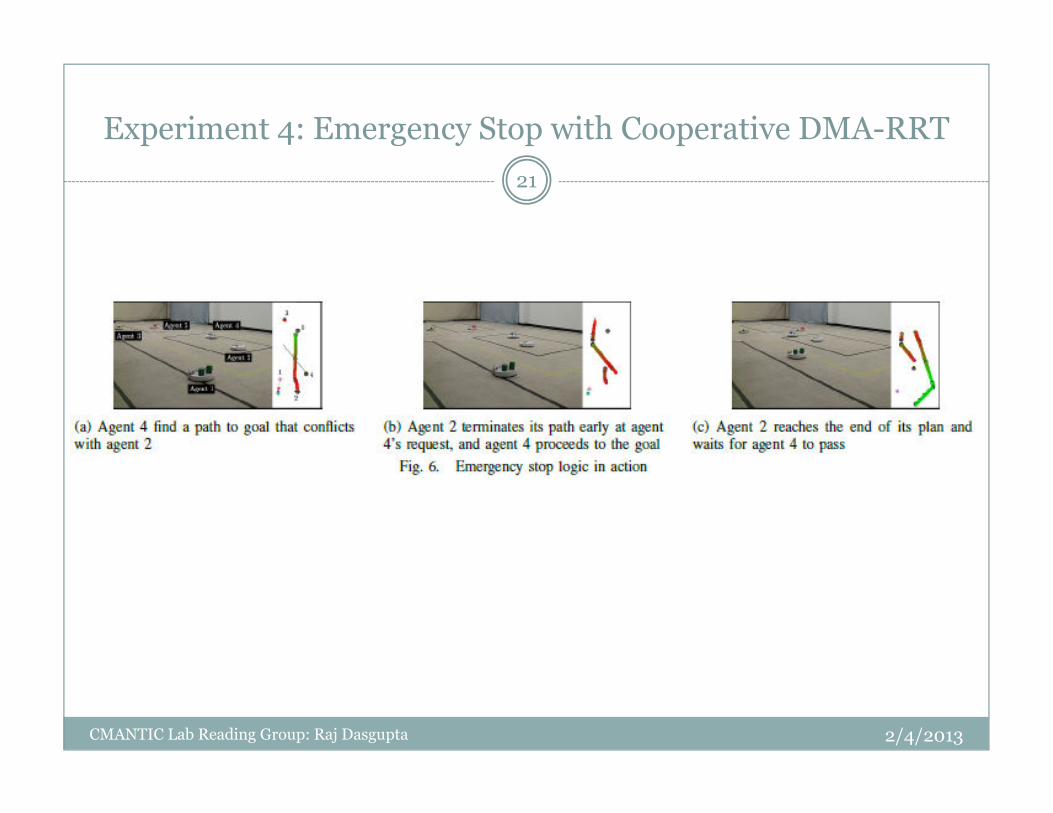
Experiment 4: Emergency Stop with Cooperative DMA-RRT
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
21

Experiment 3: Collision Avoidance
� 5 min run on open map� Minimum inter-agent separation allowed = 0.3 m� Satisfied by both algorithms as per Tables I and II
� Implies both algorithms achieve collision avoidance
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
22
Conclusion
� Main contribution: Merit-based token passing integrated with CL-RRT planner
� Future work
� Communication (range) constraints
� Dynamic obstacles
� Larger simulations/experiments
2/4/2013CMANTIC Lab Reading Group: Raj Dasgupta
23