dÁlkovÝ prŮzkum zemĚhomel.vsb.cz/~hor10/vyuka/dpz prednasky/dpz 2014.pdfvyznačením rozsahu...
TRANSCRIPT

Vysoká škola báňská – Technická univerzita Ostrava
Hornicko-geologická fakulta
DÁLKOVÝ PRŮZKUM ZEMĚ
(E-learningová podpora)
Doc. Dr. Ing. Jiří Horák
Ostrava, 2014

Vysoká škola báňská – Technická univerzita Ostrava
Hornicko-geologická fakulta
DÁLKOVÝ PRŮZKUM ZEMĚ
(E-learningová podpora)
Doc. Dr. Ing. Jiří Horák
Ostrava, 2014

i
Obsah Seznam obrázků ........................................................................................................................ iv
1 Úvod .................................................................................................................................... 1
2 Definice a vymezení............................................................................................................ 1
3 Elektromagnetické záření .................................................................................................... 5
3.1 Vlnový charakter záření ............................................................................................... 5
3.2 Kvantový charakter záření ........................................................................................... 6
4 Elektromagnetické spektrum............................................................................................... 8
5 Radiometrické veličiny ....................................................................................................... 9
6 Zdroje záření ..................................................................................................................... 11
6.1 Přírodní zdroje ........................................................................................................... 11
6.1.1 Slunce ................................................................................................................. 11
6.1.2 Země ................................................................................................................... 12
6.2 Umělé zdroje záření ................................................................................................... 12
7 Interakce s prostředím ....................................................................................................... 13
7.1 Odraz ......................................................................................................................... 15
7.1.1 Nehomogenity .................................................................................................... 17
7.1.2 Určování odrazivosti .......................................................................................... 17
7.1.3 Albedo ................................................................................................................ 18
7.1.4 Diagram odrazivosti ........................................................................................... 18
7.2 Vliv atmosféry ........................................................................................................... 19
7.2.1 Atmosféra ........................................................................................................... 20
7.3 Rozptyl v atmosféře ................................................................................................... 22
7.4 Absorbce v atmosféře ................................................................................................ 24
7.5 Celková propustnost atmosféry ................................................................................. 26
7.6 Přenosová funkce atmosféry ...................................................................................... 27
8 Krajinné objekty a jejich identifikace a hodnocení ........................................................... 30
8.1 Vegetační povrch ....................................................................................................... 31
8.1.1 Spektrální vlastnosti listu ................................................................................... 31
8.1.2 Parametry ovlivňující odrazivost vegetace......................................................... 36
8.2 Voda ........................................................................................................................... 41
8.2.1 Voda v kapalném skupenství .............................................................................. 41
8.2.2 Sníh a led ............................................................................................................ 44

ii
8.3 Horniny, zeminy a antropogenní povrchy ................................................................. 44
8.3.1 Spektrální projev půdy ....................................................................................... 45
8.3.2 Spektrální projev minerálů ................................................................................. 47
8.3.3 Spektrální projevy hornin ................................................................................... 49
8.3.4 Spektrální projevy antropogenních povrchů ...................................................... 52
9 Pořizování dat DPZ ........................................................................................................... 53
9.1 Analogový záznam při fotografování ........................................................................ 55
9.1.1 Filmový materiál ................................................................................................ 58
9.1.2 Kamery ............................................................................................................... 61
9.2 Radiometr .................................................................................................................. 62
9.2.1 Spektrální měření ............................................................................................... 64
9.2.2 Detektory ............................................................................................................ 65
9.2.3 Kalibrace ............................................................................................................ 67
9.3 Zobrazující přístroje .................................................................................................. 67
9.3.1 Mechanický skener ............................................................................................. 68
9.3.2 Elektronický skener ............................................................................................ 74
9.4 Nosiče ........................................................................................................................ 76
9.5 Družice a jejich přístrojová technika ......................................................................... 78
9.5.1 Meteorologické mise .......................................................................................... 78
9.5.2 Družice pro tematické sledování ........................................................................ 80
10 Principy zpracování dat DPZ ............................................................................................ 84
10.1 Popis naměřeného souboru dat .............................................................................. 85
11 Analogové zpracování dat DPZ ........................................................................................ 85
11.1 Interpretace fotografických snímků ....................................................................... 86
12 Digitální zpracování dat DPZ ........................................................................................... 90
12.1 Geometrické korekce ............................................................................................. 93
12.2 Radiometrické korekce .......................................................................................... 97
12.3 Zvýraznění obrazu................................................................................................ 101
12.3.1 Bodové zvýraznění ........................................................................................... 102
12.3.2 Prostorové zvýraznění ...................................................................................... 106
12.3.3 Spektrální zvýraznění ....................................................................................... 112
12.4 Klasifikace ........................................................................................................... 116
12.4.1 Řízená klasifikace ............................................................................................ 118

iii
12.4.2 Neřízená klasifikace ......................................................................................... 122
12.4.3 Hybridní klasifikace ......................................................................................... 123
12.4.4 Klasifikace neuronovou sítí .............................................................................. 124
12.4.5 Odhad přesnosti klasifikace ............................................................................. 124
12.5 Postklasifikační úpravy ........................................................................................ 125
13 Radarová analýza ............................................................................................................ 125
13.1 Geometrické vlastnosti radarových obrazových záznamů ................................... 127
13.1.1 Prostorové rozlišení bočního radaru ................................................................. 128
13.2 Geometrické charakteristiky radarových snímků ................................................ 128
13.3 Parametry ovlivňující vzhled radarových snímků ............................................... 129
13.4 Radarový signál vegetace..................................................................................... 131
13.5 Radarový signál kapalné vody ............................................................................. 131
13.6 Radarový signál sněhu a ledu............................................................................... 131
13.7 Radarový signál půdy .......................................................................................... 132
14 LIDAR ............................................................................................................................ 132
14.1 Princip fungování ................................................................................................. 132
14.2 Aplikace ............................................................................................................... 133
15 Typické aplikace DPZ ..................................................................................................... 133
Seznam literatury .................................................................................................................... 136
Odkazy ................................................................................................................................... 137

iv
Seznam obrázků
Obrázek 1 Rozdělení metod DPZ podle zdroje energie (Dobrovolný, 1998) ............................ 4
Obrázek 2 Vektory intenzity elektrického pole E a magnetického pole H při šíření
elektromagnetické vlny (NRC, nedatováno) .............................................................................. 5
Obrázek 3 Elektromagnetické spektrum (Kolář et al., 1997) ..................................................... 8
Obrázek 4 Sluneční spektrum ve vesmíru, na zemském povrchu a model černého tělesa o
teplotě 6000K (podle Silva in Meer, 1992) .............................................................................. 12
Obrázek 5 Lom a odraz na rozhraní (http://www.k-
wave.org/documentation/example_tvsp_snells_law.php) ........................................................ 15
Obrázek 6 Vícesměrný odraz záření na nerovnostech povrchu ............................................... 16
Obrázek 7 Diagramy odrazivosti pro difúzní povrch (a), zrcadlový povrch (b), kombinovaný
povrch (c) a rýhovaný povrch (d) (Kolář, Halounová, Pavelka, 1997) .................................... 19
Obrázek 8 Výškový profil zemské atmosféry
(http://en.wikipedia.org/wiki/Atmosphere_of_Earth) .............................................................. 21
Obrázek 9 Rozdílný rozptyl modrého a červeného světla na stejně velké částici (Meer, 1992)
.................................................................................................................................................. 23
Obrázek 10 Rozptyl modrého záření v atmosféře během dne (Meer, 1992) ........................... 24
Obrázek 11 Rozptyl všech složek světla při průchodu atmosférou během západu Slunce, v ose
zůstává jen červená (Meer, 1992) ............................................................................................ 24
Obrázek 12 Schéma atmosférické absorbce v závislosti na vlnové délce záření (podle Estes in
Meer, 1992) .............................................................................................................................. 25
Obrázek 13 Průměrné rozdělení dopadajícího slunečního záření (Meer, 1992) ...................... 27
Obrázek 14 Složení spektrální záře v měřící aparatuře (Kolář et al., 1997) ............................ 28
Obrázek 15 Koeficient záře písku (a) a vody (b) při měření z výšky 250 km (1) a u povrchu
(2) (Kolář et al., 1997) .............................................................................................................. 29
Obrázek 16 Spektrální odrazivost vody (1), vegetace (2), suché půdy (3) a vlhké půdy (4)
(Kolář et al., 1997) ................................................................................................................... 31
Obrázek 17 Průběh odrazivosti typického listu a absorpce vody v rozsahu 0.4 až 2.6 μm
(Meer, 1992) ............................................................................................................................. 32
Obrázek 18 Výsledek interakce záření ve viditelné (RGB) a infračervené (IR) části spektra
s vegetací (NRC, nedatováno) .................................................................................................. 32
Obrázek 19 Princip rozkladu a skládání světla při průchodu více vrstvami ............................ 34
Obrázek 20 Navýšení odrazivosti odrazem záření na více vrstvách (Kolář et al., 1997) ........ 34
Obrázek 21 Pohled z okna – styl Titulek ................................................................................. 36
Obrázek 22 Intervaly spektrálních křivek pro listnaté (hardwoods) a jehličnaté (conifers)
stromy (Meer, 1992) ................................................................................................................. 37
Obrázek 23 Stárnutí zdravého bukového listu během opadání (Meer, 1992) .......................... 38
Obrázek 24 Efekt vlhkosti na odrazivost kukuřičných listů (Meer, 1992) .............................. 39
Obrázek 25 Změny spektrální křivky bukových listů vlivem infekce (24- listy zdravé, 21- listy
s nekrózami) (Clevers, 1999) ................................................................................................... 40
Obrázek 26 Spektrální křivky mořské vody (a), kalné vody (b) a vody s chlorofylem (c)
(Kolář et al., 1997) ................................................................................................................... 42

v
Obrázek 27 Spektrální odrazivost vody s vysokým obsahem kalu (1) a čisté jezerní vody (2)
(Kolář et al., 1997) ................................................................................................................... 42
Obrázek 28 Spektrum hlavních polutantů v řekách Rouge a Detroit a jejich vliv na odrazivost
vody v řekách (Meer, 1992) ..................................................................................................... 43
Obrázek 29 Spektrální odrazivost a emisivita pro suché půdy - bez písku a s pískem (Meer,
1992) ......................................................................................................................................... 46
Obrázek 30 Spektrální křivka odrazivosti v závislosti na velikosti částic jílu (vlevo bentonit,
vpravo kaolín) (Meer, 1992) .................................................................................................... 47
Obrázek 31 Spektrální charakteristiky vybraných minerálů v rozsahu 2 až 2.4 μm (s
vyznačením rozsahu senzoru TM7) (Dobrovolný, 1998) ........................................................ 48
Obrázek 32 Spektra vybraných minerálů a hornin s vyznačenými pásmy senzoru Landsat 7
ETM+ (horizontálně odsazena pro názornost) (Drury, 1997, in Dobrovolný, 1998) .............. 49
Obrázek 33 Závislost emisivity křemičitých magmatických hornin na vlnové délce Meer,
1992) ......................................................................................................................................... 50
Obrázek 34 Vliv zvětrávání a alterace na odrazivost hornin (Meer, 1992) ............................. 51
Obrázek 35 Vliv zvětrávání a alterace na odrazivost hornin (Meer, 1992) ............................. 52
Obrázek 36 Spektrální křivky vybraných látek (Meer, 1992) .................................................. 53
Obrázek 37 Princip pořizování obrazového záznamu pomocí zobrazovacích zařízení na nosiči
(zleva doprava: analogový záznam z letecké kamery, digitální záznam z mechanického
skeneru, digitální záznam z elektronického řádkového skeneru) (Clevers, 1999) ................... 54
Obrázek 38 Kolmý snímek (a), šikmý bez horizontu (b), šikmý s horizontem (c), vodorovný
snímek (d) (Dobrovolný, 2005) ................................................................................................ 55
Obrázek 39 Rozdíly mezi ortogonální a centrální projekcí (Dobrovolný, 2005) ..................... 56
Obrázek 40 Kolísání měřítka (Dobrovolný, 2005) ................................................................... 57
Obrázek 41 Radiální posuny (Smith 1943, in Kumpera et al., 1986) ...................................... 57
Obrázek 42 Senzitometrická křivka tvrdého fotografického materiálu (Kolář et al., 1997) .... 59
Obrázek 43 čárové vzory pro určování prostorové rozlišovací schopnosti na fotografiích
(Dobrovolný, 2005) .................................................................................................................. 60
Obrázek 44 Základní součásti řadové kamery jednoobjektivové (Dobrovolný, 2005) ............ 62
Obrázek 45 Schéma konstrukce radiometru (Kolář et al., 1997) ............................................. 62
Obrázek 46 Zorné pole radiometru (Halounová, Pavelka, 2005)............................................. 63
Obrázek 47 Odvození prostorového rozlišení radiometru (NRC, nedatováno) ....................... 64
Obrázek 48 Rozkládání bílého světla hranolem
(http://www.cyberphysics.co.uk/topics/light/prisms.htm) ....................................................... 64
Obrázek 49 Kruhový filtr (Kolář et al., 1997) .......................................................................... 65
Obrázek 50 Činnost mechanického skeneru se snímáním napříč osy letu (skener MSS) (Kolář
et al., 1997) ............................................................................................................................... 68
Obrázek 51 Dvě varianty uspořádání lineárního skeneru (Kolář et al., 1997) ......................... 69
Obrázek 52 Odvození vzniku tangenciální chyby (Kolář et al., 1997) .................................... 70
Obrázek 53 Změna Δx v závislosti na odklonu od svislice (Dobrovolný, 2005) ..................... 71
Obrázek 54 Vztah mezi příčným a podélným zkreslením pixelu v důsledku tangenciálního
zkreslení (Dobrovolný, 2005) .................................................................................................. 71
Obrázek 55 Vztah mezi příčným a podélným zkreslením pixelu v důsledku tangenciálního
zkreslení (Clevers, 1999). ......................................................................................................... 72

vi
Obrázek 56 Vznik chyby z dat sejmutých na kulové ploše a promítaných na rovinnou plochu
(Kolář et al., 1997) ................................................................................................................... 72
Obrázek 57 Stírací skener (podélné skenování) (Dobrovolný, 1998) ...................................... 75
Obrázek 58 Dráha letounu při fotografování snímků v řadě (1) Podélný překryt v řadě, (2)
příčný překryt mezi řadami (Kumpera et al., 1986, podle Millera, Millera 1961)................... 76
Obrázek 59 Tři základní typy drah družic (Kolář et al., 1997) ................................................ 78
Obrázek 60 Družice Meteosat (vlevo 1. generace a vpravo 2.generace)
(http://en.wikipedia.org) ........................................................................................................... 79
Obrázek 61 Družice NOAA (http://3.bp.blogspot.com/-
6w5TdXEuXf0/UISxsOkJjKI/AAAAAAAAA0M/IphrAcocMjs/s1600/112077main_NOAAN
instr.gif) .................................................................................................................................... 80
Obrázek 62 LANDSAT 8 (http://landsat.gsfc.nasa.gov/wp-
content/uploads/2013/01/ldcm_2012_COL.png) ..................................................................... 80
Obrázek 63 LANDSAT 8 SPOT 5 (http://en.wikipedia.org/wiki/SPOT_(satellite)) ............... 81
Obrázek 64 Družice Terra (http://cimss.ssec.wisc.edu/satmet/modules/9_global_monitor/gm-
8.html) ...................................................................................................................................... 82
Obrázek 65 Start nosné rakety a vlastní družice IKONOS
(http://satimagingcorp.tw.cn/satellite-sensors/ikonos.html) .................................................... 82
Obrázek 66 Družice QuickBird
(http://www.exelisinc.com/solutions/QuickBird/Pages/default.aspx) ..................................... 83
Obrázek 67 Družice WorldView - 2
(http://news.satimagingcorp.com/2008/03/digitalglobe_anticipates_launch_of_worldview-
2_satellite_sensor.html) ............................................................................................................ 83
Obrázek 68 Družice řady GeoEye a Ikonos (http://www.satimagingcorp.com/satellite-
sensors/) .................................................................................................................................... 83
Obrázek 69 Družice Sentinel 1 (http://www.turbosquid.com/3d-models/obj-sentinel-1-earth-
observation/759136) ................................................................................................................. 84
Obrázek 70 Odhalená stanoviště raket a pomocného vybavení na Kubě 1962
(http://www.jamesshuggins.com/h/u-2a/u-2_62_cuba_missile_base.htm) .............................. 86
Obrázek 71 Tvary koruny stromů (Žíhlavník, 1992) ............................................................... 88
Obrázek 72 Siluety stromů a tvary jejich stínu (upraveno podle Žíhlavník, 1992) ................. 88
Obrázek 73 Typy říční sítě podle různých hornin a klimatu: (1) gabra, (2,3) granity, (4,5)
jílovité břidlice, (6) fylity (Kumpera et al., 1986) .................................................................... 89
Obrázek 74 Typy říční sítě podle Dorniče (1975, in Kumpera et al., 1986) ............................ 90
Obrázek 75 Kvantifikace signálu (Dobrovolný, 1998) ............................................................ 91
Obrázek 76 Princip ukládání BIP, BIL, BSQ (Dobrovolný, 2005) .......................................... 92
Obrázek 77 Projektivní transformace (Dobrovolný, 2005) ...................................................... 95
Obrázek 78 Princip nejbližšího souseda ................................................................................... 96
Obrázek 79 Obraz území před a po radiometrické korekci (Dobrovolný, 2005) ..................... 98
Obrázek 80 Radarový obraz před a po odstranění páskování a jiného šumu
(http://geog.hkbu.edu.hk/geog3610/lect-08.pdf) .................................................................... 100
Obrázek 81 Regresní analýza mezi TM4 a TM3 s určením hodnoty A odpovídající příspěvku
atmosféry (Dobrovolný, 1998) ............................................................................................... 101
Obrázek 82 Prahování obrazu (Dobrovolný, 2005) ............................................................... 102

vii
Obrázek 83 Hustotní řezy (Dobrovolný, 2005) ...................................................................... 103
Obrázek 84 Princip lineárního roztažení histogramu (Dobrovolný, 1998) ............................ 103
Obrázek 85 Princip roztažení vyrovnáním histogramu (Dobrovolný, 1998) ......................... 104
Obrázek 86 Vyrovnání četností v třídách histogram při ekvalizaci (Dobrovolný, 2005) ...... 104
Obrázek 87 Princip roztažení zvýrazněním části histogramu (Dobrovolný, 1998) ............... 105
Obrázek 88 Princip roztažení se saturací histogramu (upraveno podle Dobrovolný, 1998) .. 105
Obrázek 89 Syntéza v přirozených barvách (Dobrovolný, 2005) .......................................... 106
Obrázek 90 Vysokofrekvenční (vlevo) a nízkofrekvenční (vpravo) informace (Dobrovolný,
1998) ....................................................................................................................................... 107
Obrázek 91 Princip filtrace (Dobrovolný, 1998) ................................................................... 107
Obrázek 92 Různé lineární uspořádání vah v rotujícím oknu ................................................ 108
Obrázek 93 Sada filtrů s různým uspořádáním vah (rotující okno) ....................................... 109
Obrázek 94 Příklad Sobelových filtrů .................................................................................... 110
Obrázek 95 Příklad Prewittových filtrů ................................................................................. 110
Obrázek 96 Princip využití Fourierovy transformace pro zvýraznění hran v obraze (vlevo) a
naopak pro vyhlazení obrazu (vpravo) (Dobrovolný, 1998) .................................................. 112
Obrázek 97 Princip využití Fourierovy transformace pro odstranění horizontálního páskování
obrazu (Dobrovolný, 2005) .................................................................................................... 112
Obrázek 98 Výsledné hlavní komponenty (Dobrovolný, 2005) ............................................ 114
Obrázek 99 Princip odvození obecných komponent CC (Dobrovolný, 1998) ...................... 115
Obrázek 100 Uspořádání modelu IHS (Kolář et al., 1997) .................................................... 116
Obrázek 101 Princip neřízené a řízené klasifikace (podle Lillesand et al., 2008) ................. 117
Obrázek 102 Volba trénovacích ploch (Dobrovolný, 2005) .................................................. 118
Obrázek 103 Graf koincidence pro pásma TM2, TM4 a TM5 (Dobrovolný, 2005) ............. 119
Obrázek 104 Klasifikátor minimální vzdálenosti od průměru (Clevers, 1999) ..................... 120
Obrázek 105 Klasifikátor rovnoběžnostěnový (parallelpiped) (Clevers, 1999) ..................... 120
Obrázek 106 Klasifikátor nejbližšího souseda (Clevers, 1999) ............................................. 121
Obrázek 107 Klasifikátor maximální pravděpodobnosti (Clevers, 1999) .............................. 121
Obrázek 108 Přirozené shlukování hodnot pixelů podle pásem A a B (Dobrovolný, 2005) . 122
Obrázek 109 Varianty metod shlukové analýzy (Dobrovolný, 1998) ................................... 122
Obrázek 110 Zrnitá textura radarového obrazu (Dobrovolný, 2005) ..................................... 126
Obrázek 111 Princip práce bočního radaru – vyslání a přijetí mikrovlnného pulsu (a) a
odpovídající záznam (b) (Kolář et al., 1997) ......................................................................... 126
Obrázek 112 Raketoplán Endeavour při misi SRTM
(http://www.lethist.lautre.net/endeavour.htm) ....................................................................... 127
Obrázek 113 Geometrické vlastnosti radarových obrazových záznamů (Dobrovolný, 1998)
................................................................................................................................................ 127
Obrázek 114 Vysvětlení příčného rozlišení (Dobrovolný, 2005) .......................................... 128
Obrázek 115 Rozdíly v záznamu radarového echa v šikmých a horizontálních vzdálenostech
(Dobrovolný, 1998) ................................................................................................................ 129
Obrázek 116 Zhuštění signálu radaru na přivráceném svahu (Dobrovolný, 2005)................ 129
Obrázek 117 Používaná pásma mikrovlnného záření a příklad obrazu získaného z příslušného
pásma (Dobrovolný, 2005) ..................................................................................................... 130

viii
Obrázek 118 Vliv polarizace (HH, VV, HV) radarového signálu na výsledný obraz
(Dobrovolný, 2005) ................................................................................................................ 131
Obrázek 119 Princip laserového skenování (LIDAR)
(http://proceedings.esri.com/library/userconf/proc01/professional/papers/pap214/p214.htm)
................................................................................................................................................ 132

1
1 Úvod
Dálkový průzkum Země je prudce se rozvíjejícím se oborem, který využívá významného
pokroku v technických prostředcích pořizování dat (senzory, snímací zařízení, nosiče,
automatizace řízení atd.) i v metodách zpracování digitálních dat (objektové a kontextové
klasifikace, metody umělé inteligence apod.). Omezený rozsah skript neumožňuje tyto nové
trendy dobře popsat; skripta jsou zaměřena především na koncepci a základy dálkového
průzkumu Země.
2 Definice a vymezení
Dálkový průzkum (ang. remote sensing; Earth observation) se zabývá získáváním informací
o objektech a jevech na dálku bez přímého kontaktu, kdy:
k přenosu informace slouží elektromagnetické záření (objekty/jevy samy vyzařují
nebo mění vlastnosti elektromagnetického záření a prozrazují tak svoji přítomnost
a své vlastnosti)
zkoumané objekty a jevy jsou na zemském povrchu (vč. atmosféry, vodních těles,
sedimentů atd.)
Záznamové zařízení pro registraci elektromagnetického záření je umístěno na pohyblivých
nosičích, zpravidla jsou jimi letadla nebo družice.
DPZ představuje součást geoinformačních technologií.
Definice DPZ:
Dálkový průzkum může být definován jako shromažďování informací o objektech bez
fyzického kontaktu s nimi. Letadla a družice jsou běžnými nosiči, ze kterých se měření
na dálku provádějí. Termín dálkový průzkum je omezen na metody, které využívají
elektromagnetického záření jako prostředku ke zjišťování objektů a k měření jejich
charakteristik (Sabins, 1978, in Kolář et al., 1997).
Můžeme se setkat i s úsměvnými definicemi, které adresují citlivá místa DPZ:
Dálkový průzkum je nejdražší způsob jak vytvořit obrázek (Bashfield, Intergraph
Corp., in Dobrovolný, 1998).
Dálkový průzkum je umění rozdělit svět na množství malých barevných čtverečků, se
kterými si lze hrát na počítači s cílem odhalení jejich neuvěřitelného potenciálu
(Huntigton, CSIRO Exploration in Dobrovolný, 1998).
Je nutné také připomenout vazby k dalším oborům:
Astronomie - má jiný předmět zkoumání, což jsou vesmírné objekty, jevy
a procesy.

2
Geofyzika - má odlišný předmět zkoumání (zaměřuje se na horninové prostředí na
povrchu a pod povrchem Země) a využívá i jiná média pro přenos informací než
jen elektromagnetické záření (např. seismické vlny či měření elektrických
charakteristik horninového prostředí).
Fotogrammetrie – je nejbližším oborem a prakticky dochází k jejich splývání.
Rozdíl je možné charakterizovat tak, že fotogrammetrie se zabývá především
geometrickými vlastnostmi objektů (tedy dotazuje se na polohu, případně tvar,
rozměry objektů), zatímco DPZ se zaměřuje hlavně na tematické vlastnosti objektů
a tedy zjištění, o jaký objekt se jedná a jaké jsou jeho vlastnosti).
Ze systémového hlediska můžeme DPZ rozdělovat na 2 základní části (subsystémy):
Subsystém sběru a přenosu dat. Tato část DPZ se zabývá záznamovými
zařízeními, jejich nosiči, přenosem dat na Zemi, nezbytným předzpracováním
pořízených dat a jejich doručením k uživateli. Z popisu vyplývá, že zásadní roli
v tomto subsystému hraje především technické řešení.
Subsystém analýzy dat a jejich interpretace. Po doručení dat koncovému
uživateli (případně expertovi, který pro koncového uživatele příslušnou činnost
provádí) se provádí zpracování dat, jejich analýza, syntéza, vizualizace,
interpretace. Pozornost se tedy soustřeďuje na metody a postupy zpracování dat,
především počítačově orientované.
Pro praktickou přípravu uživatelů je potřebné se seznámit zejména s metodami analýzy dat
DPZ a jejich interpretace, přesto principům a vlastnostem pořizování dat (prvnímu
subsystému) je také nutné porozumět, abychom dokázali správně objekty a jevy v DPZ
vyhodnocovat.
Technické zařízení nám poskytuje záznam elektromagnetického záření ve formě konvenční
(např. fotografický analogový snímek) nebo digitální (např. rastrový soubor). Podle toho
rozlišujeme analogové a digitální záznamy a následně mluvíme o konvenčních (analogových)
a nekonvenčních (digitálních) metodách.
Do určité míry se přitom postupy spojené s analogovými a digitálními záznamy prolínají.
Provádíme digitalizace analogových snímků a jejich proměřování. Naopak u digitálních
záznamů se můžeme také setkat s lidským faktorem typickým pro analogové zpracování –
např. při ruční vektorizaci nad digitálním snímkem nebo při jeho vizuální interpretaci.
Forma záznamu elektromagnetického záření může být buď obrazová (výsledkem je snímek)
nebo neobrazová (výsledkem může být graf, měření na linii, např. výška letu). Většina dat, se
kterými se v DPZ setkáváme, je obrazové povahy a lze na ně dobře aplikovat řadu metod
obrazového zpracování dat.
Obrazová data DPZ zobrazují objekty a jevy na zemském povrchu a tedy mohou (zpravidla
po jisté úrovni zpracování) mít podobnou roli jako mapy. Při určitém zjednodušení je možné
vymezit dva základní druhy informací v obrazových materiálech DPZ:

3
1. Geometrická informace – zejména poloha, tvar, velikost, vzdálenosti objektů.
Tento typ informací je doménou fotogrammetrie. Velmi důležitý je zejména pro
topografické mapy, proto se v současnosti tvoří a aktualizují s využitím
geometrických informací z obrazových záznamů DPZ.
2. Tematická informace – identifikace objektů a jevů (odpovídáme na otázku co je
to), jejich popis, charakteristika (odpovídáme na otázku jaké to je). Takové
informace jsou hlavním předmětem DPZ. Výsledkem zpracování je pak tematická
mapa, ukazující rozmístění sledovaných objektů a jevů.
Jaké jsou hlavní výhody DPZ vůči mapám?
Aktuálnost – získávání a zpracování obrazového materiálu DPZ je podstatně
rychlejší než u klasického mapování a může být tedy mnohem aktuálnějším
zdrojem informací.
Časové razítko - informace z území jsou zjištěny pro jasně definovaný časový
úsek, kdy bylo provedeno snímání.
Podrobnost – obrazový záznam poskytuje velké množství detailů.
Plošný rozsah – DPZ, zejména družicový, je ideální pro záznam velkoplošných
jevů (např. vývoj oblačnosti na polokouli), kdy se v jednom okamžiku zachytí
situace na velkém území.
Opakovatelnost – většina kosmických nosičů DPZ obíhá po pravidelných drahách
a je zajištěna opakovatelnost měření za téměř stejných geometrických podmínek.
Vlastnost je výhodná zejména pro zjištění dynamiky jevů.
Geometrická přesnost - po odstranění geometrických zkreslení (daných způsobem
pořízení obrazu) lze získat geometricky přesný obraz, vhodný pro zjišťování
přesné polohy identifikovaných objektů
Standardizovaný obraz - po odstranění radiometrických zkreslení (atmosféra,
osvětlení atd.) lze získat radiometricky standardizovaný obraz a tím i možnost
měřit a srovnávat velikost registrovaného elektromagnetického záření v obraze.
Informace z různých částí elektromagnetického spektra – DPZ umožňuje
zaznamenávat i neviditelné informace s velkým interpretačním významem např.
z infračervené části spektra.
Metody DPZ je možné dělit podle řady hledisek.
Podle druhu pořízených dat a typu metod jejich zpracování se rozlišují konvenční
a nekonvenční metody DPZ. Konvenční metody se zabývají pořízením a zpracováním
fotografických snímků. Fotografické snímky vznikají centrální projekcí obrazu na
fotografický materiál a jsou pořízeny v 1 okamžiku. Mohou mít vysoké prostorové rozlišení
(tedy zachycují velké detaily). Běžně využívají pouze úzké části elektromagnetického spektra.

4
Využívá se analogová forma záznamu i kopírování obrazu. Typickým nosičem fotografického
záznamového zařízení je letadlo, méně často i družice, balón či nepilotované modely (UAV).
V českém prostředí se konvenčními metodami DPZ zabývali zejména Murdych, Jeřábek,
Čapek, Šmidrkal.
Nekonvenční metody pořizují digitální obrazový záznam pomocí skenerů, které postupně
snímají elektromagnetické záření přicházejícího ze sledovaného prostoru a registrují ho pro
jednotlivé elementy (pixely) obrazu. V případě skenerů s řádkovým rozkladem se uplatňuje
osová projekce. Nekonvenční metody využívají různé části elektromagnetického spektra.
Záznam je digitální a celé zpracování je počítačové. Nosičem je družice, méně často letadlo.
K našim předním odborníkům zabývajícími se nekonvenčními metodami DPZ patří
Halounová, Pavelka, Kolář, Dobrovolný.
Podle původu snímaného záření je možné dělit metody DPZ na pasivní (provádí se pouze
pasivní registrace přicházejícího záření) a aktivní (součástí DPZ je i vysílání záření
z umělého zdroje, který je typicky umístěn na nosiči, část záření se odráží od sledovaných
objektů a vrací se zpět, kde je registrováno. Patří k nim např. radar nebo lidar). Pasivní
metody lze ještě rozdělit na pasivní přímé (pasivní registrace odraženého a rozptýleného
záření Slunce) a pasivní nepřímé (sleduje se záření vyzařované objekty na zemském povrchu
a v atmosféře, které je sekundárně vyvoláno zářením Slunce. Např. termovize).
Obrázek 1 Rozdělení metod DPZ podle zdroje energie (Dobrovolný, 1998)
Další možnosti dělení DPZ jsou podle:
nosiče – letadla, družice, modely, balony, vrtulníky, pozemní základny
zaznamenávané části elektromagnetického spektra - panchromatické, infračervené,
tepelné, radarové
barvy – obrazové materiály černobílé, barevné
osy záběru – snímky (záznamy) svislé, šikmé
zorného pole kamery – snímky s úzkým úhlem, normální, širokoúhlé

5
velikosti sledovaného území – globální, oblastní, lokální, detailní
3 Elektromagnetické záření
Nositelem informace v DPZ je elektromagnetické záření. To lze popsat pomocí vlnové nebo
kvantové teorie. Oba přístupy jsou pro DPZ užitečné.
3.1 Vlnový charakter záření
Elektromagnetická vlna je zvláštní případem elektromagnetického pole, kde se periodicky
mění velikost intenzity elektrického pole E a magnetického pole H.
Obrázek 2 Vektory intenzity elektrického pole E a magnetického pole H při šíření elektromagnetické vlny (NRC,
nedatováno)
Vektory E a H jsou k sobě kolmé i kolmé ke směru šíření.
Vlnová délka je přímo úměrná rychlosti šíření elektromagnetické vlny a délce periody, resp.
nepřímo úměrná frekvenci záření.
cTc
kde ν je frekvence, T perioda oscilace a λ vlnová délka.
Elektrické vlastnosti materiálů popisuje permitivita ε [F/m], zatímco jejich magnetické
vlastnosti permeabilita μ [H/m]. Permitivita a permeabilita vakua jsou konstanty. Vlastnosti
ostatních látek vzhledem k velmi malým hodnotám čísel vyjadřujeme raději pomocí
relativních charakteristik, tedy pomocí relativní permitivity εr a relativní permeability μr. Platí,
že 0 r a 0 r a tedy
rr
cc
0
Kde c0 je rychlost šíření elektromagnetického záření ve vakuu, c pak v konkrétním prostředí
s parametry εr a μr.

6
Z fyziky známe, že látky s μr < 1 označujeme jako diamagnetické, μr > 1 jako paramagnetické
a μr >> 1 jako feromagnetické. Většina přírodních látek má μr kolem 1, výjimku tvoří jen
některé kovové antropogenní povrchy (střechy apod.). Proto má v DPZ prakticky větší
význam hodnocení elektrických vlastností materiálu, kde u přírodních látek kolísá relativní
permitivita 1< εr <100.
Tabulka 1 Relativní permitivita vybraných látek (18 st.C, normální tlak) (Mikulčák et al., 1970)
Látka εr
vzduch 1,00060
dřevo (suché) 2-8
křemen 4
sklo 5-7
břidlice 7
slída 6-8
voda 81
Jak je patrné v tabulce 1, výrazně odlišnou permitivitu má voda (o řád větší než většina
ostatních materiálů), proto má také voda výrazně odlišné chování při interakci
s elektromagnetickým zářením a její přítomnost výrazně ovlivňuje společný projev s jiným
materiálem.
Z relativní permitivity a permeability lze odvodit index lomu n.
rrn
Protože jde opět o velmi malé číslo a zpravidla potřebujeme znát index lomu při přechodu
z jednoho prostředí do druhého, využíváme zpravidla relativní index lomu n12.
11
22
1
212
rr
rr
n
nn
kde n je absolutní index lomu, n12 relativní index lomu.
Další důležitou vlastností je polarizace vlny. Určuje se podle orientace směru vektoru E
k zemskému povrchu. Pokud vektor E kmitá ve všech směrech, mluvíme o nepolarizovaném
záření. U polarizovaného záření je vektor intenzity elektrického pole E stále stejně orientován
(a tudíž i H). Pokud je E rovnoběžné s místní normálou, jde o vertikálně polarizované
záření. Pokud je E rovnoběžné s povrchem, jde o horizontálně polarizované záření.
3.2 Kvantový charakter záření
Podle kvantové teorie je záření šířeno pomocí kvant, označovaných jako fotony. Energie
fotonu je přímo úměrná frekvenci záření.
hchQ

7
kde h je Planckova kvantovací konstanta.
Čím větší je vlnová délka, tím menší je energie fotonu a tedy i menší energie
elektromagnetického záření. Slabší energie se projevuje horší schopností detekce. Proto
u záření s dlouhými vlnovými délkami (a tedy menší energií přenášenou jednotlivými fotony)
musíme používat citlivější aparatury a/nebo přijímat signál současně z větší plochy, aby se
akumulovalo dostatečné množství energie nezbytné k překonání šumové hranice a zápisu
signálu. Proto mají zařízení pro detekci dlouhých vlnových délek horší prostorové rozlišení.
Zdrojem elektromagnetického záření je každé těleso, liší se pouze intenzitou a vlnovou délkou
emitovaného záření. Elektromagnetického záření vzniká především transformací z tepelné
energie těles. Směs pohybů částic látky odpovídá vnitřní energii a projevuje se jako teplota
látky. Proto každé těleso s nenulovou teplotou vyzařuje elektromagnetické záření.
V idealizovaném případu černého tělesa platí Stefan-Boltzmanův zákon, podle kterého je
intenzita vyzařování M přímo úměrná 4. mocnině teploty.
4TMč
kde σ je konstanta.
Na které vlnové délce je maximální intenzita záření pro danou teplotu tělesa udává Wiennův
zákon posuvu
T
bmax
kde b je konstanta.
Skutečná tělesa ale nemají ideální transformaci tepelné energie na zářivou (jako u černého
tělesa) a jejich efektivita je menší. Míru efektivity vyjadřuje emisivita tělesa. Emisivita závisí
na materiálu, vlnové délce a teplotě. Spektrální emisivita pro konkrétní vlnovou délku λ
udává poměr mezi intenzitou vyzařování zkoumaného tělesa a absolutně černého tělesa.
čM
M
Pokud je emisivita rovna 1, je to černé těleso. Pokud by se emisivita rovnala 0, mělo by těleso
nulovou vnitřní energii, nulovou teplotu a byl by to dokonalý odražeč záření.
Pokud pro danou teplotu je pro všechna λ emisivita konstantní, jde o šedivý zářič; pokud ne,
jedná se o barevný zářič.
Protože u kosmických objektů neznáme jejich emisivitu, určujeme na základě vlnové délky
maximálního záření tzv. jasovou teplota tělesa, což je teplota černého tělesa o stejné intenzitě
záření jako pozorujeme. Ve skutečnosti kvůli emisivitě nižší než 1 je skutečná teplota tělesa
vždy vyšší.

8
4 Elektromagnetické spektrum
Elektromagnetické záření vzniká obecně v důsledku zrychleného nebo zpomaleného pohybu
nabitých částic. Elektromagnetické spektrum je spojité a má obrovský rozsah – 20 řádů.
Celé spektrum však není pro DPZ využito. Nejvíce se využívají pásma označovaná jako
viditelná, infračervená a mikrovlnná části spektra.
Obrázek 3 Elektromagnetické spektrum (Kolář et al., 1997)
Viditelná část spektra (0,38-0,72 μm) se běžně označuje jako světlo a tradičně se dělí na
3 části – modrou (B), zelenou (G) a červenou (R).
Infračervené záření (IČ, IR, 0,72-25 μm, případně podle jiných autorů jen 15 μm) se rozděluje
na blízké IČ, střední IČ a daleké IČ.
Tabulka 2 Rozdělení infračerveného spektra (Kolář et al., 1997)
Pásmo vlnový rozsah
blízké IČ (NIR near infrared) 0,72 - 1,3 μm
střední IČ (MIR mid infrared) 1,3 - 4 μm
daleké IČ (TIR thermal infrared) 4 – 25 μm
Následují submilimetrové vlny (25 μm – 1 mm), které se v DPZ nevyužívají kvůli silné
absorpci CO2.
Mikrovlnné záření má rozsah vlnových délek mezi 1 mm a 1 m. Je zvykem ho dělit na
8 pásem označených kódy (viz tab. 3).
Tabulka 3 Rozdělení mikrovlnného spektra (Kolář et al., 1997)
Pásmo vlnový rozsah
Ka 0,8 - 1,1 cm
K 1,1 - 1,7
Ku 1,7 – 2,4
X 2,4 – 3,8
C 3,8 – 7,5
S 7,5 – 15
L 15 – 30
P 30 – 100 cm

9
Mikrovlnné záření běžně využíváme i v řadě jiných aplikací – mobilní telefony, GNSS (GPS
L1 má 19 cm a L2 asi 24 cm), mikrovlnné trouby.
Následují radiové vlny (VKV, KV, SV, DV), Hertzovy vlny a telefonie, které se v DPZ
nevyužívají.
Široké elektromagnetické spektrum odpovídá široké škále procesů, které způsobují vznik
záření. Pochopitelně změny ve větší vzdálenosti od jádra atomů jsou spojeny s menšími
změnami energie a tedy i s většími vlnovými délkami emitovaného záření. Navíc se u větších
vlnových délek projevuje spíše pásový charakter emisivity (širší interval vlnových délek
emitovaného záření) než u menších vlnových délek, které se projevují čarovým spektrem.
Rotační pohyb atomů v molekulách způsobuje TIR nebo MW, kmitavý pohyb atomů kolem
chemických vazeb vede ke vzniku NIR či MIR. Oba typy vytváří pásové spektrum, kde není
žádná typická vlnová délka.
Přechody elektronů mezi orbity způsobuje UV, V nebo NIR záření. Vzniká čarové spektrum.
Ještě nižší vlnové délky než UV má záření, které vzniká při disociaci atomů.
5 Radiometrické veličiny
Základní zkoumaným jevem v DPZ je interakce elektromagnetického záření se zkoumaným
objektem. Souhrnnou informaci o průběhu interakce poskytuje energie výsledného záření Q.
Kromě zářivé energie Q se ale používá řada dalších radiometrických veličin, které se hodí pro
měření nebo pro vyjádření určitých vztahů charakterizujících interakci záření s hmotou.
Je zřejmé, že vzhledem k velikosti rozsahu elektromagnetického spektra nebude interakce
probíhat stejně v různých částech spektra. Proto je potřebné uvádět i vlnový rozsah záření, při
kterém jsou radiometrické veličiny určovány. Tyto spektrální radiometrické veličiny jsou
označeny s indexem λ nebo ν.
Tabulka 4 Přehled radiometrických veličin (Kolář et al., 1997)
veličina symbol fyzikální rozměr
zářivá energie Q J
zářivý tok Φ W
intenzita vyzařování M W*m-2
intenzita ozařování E W*m-2
zářivost I W*sr-1
zář L W*m-2
*sr-1
Zářivá energie Q je celková energie nesená elektromagnetickou vlnou. Je možné ji vyjádřit
jako kumulaci energie v určitém rozsahu spektra (tedy jako integrál zářivé energie mezi
krajními vlnovými délkami) nebo jako integrál zářivého toku v určitém časovém období.

10
2
1
)(
dQQ
2
1
t
t
dtQ 4
Zářivý tok Φ vyjadřuje rychlost úbytku nebo přírůstku energie (tedy změnu energie za čas)
v daném místě.
dt
dQ
Zářivý tok připadající na jednotku plochy je reprezentován intenzitou záření. Podle její
orientace rozlišujeme intenzitu ozařování E, což je možno interpretovat jako velikost energie,
která ozařuje plochu A, a intenzitu vyzařování M, jako velikost energie, která vyzařuje
z plochy A. Neplatí zde žádná omezení směrem nebo prostorovým úhlem, proto je to
souhrnná intenzita záření, které dopadá nebo vystupuje na/z plochu A.
dA
dE
dA
dM
Jinak je tomu v případě zářivosti I. Zářivost je zářivý tok, který vychází z bodu do
prostorového úhlu Ω .
d
dI
Pokud není velikost zdroje záření zanedbatelná, je vhodnou veličinou pro měření záře L.
dA
dI
dA
dIL
cos
Záře je zářivost určité plochy pozorované pod jistým úhlem. Popisuje závislost na
prostorovém úhlu i směru. Lze ji použít k odvození ostatních radiometrických veličin.
dAθ představuje efektivní plochu zářiče (tedy průmět do směru pozorování) a vypočte se jako
dA*cos θ.
Pokud je zář L ve všech směrech stejná, mluvíme o izotropním záření. L v libovolném úhlu
je pak stejná jako zář ve směru kolmém k povrchu Lθ = Ln

11
Celková energie vyzářená do poloprostoru je
E=π *L
Ostatní veličiny klesají od maximální hodnoty pro nadir, což prakticky vyjadřuje Lambertův
(kosinový) zákon. Povrchy, které se takto chovají, označujeme jako Lambertovské nebo
difuzní. Patří k nim např. sádra nebo filtrační papír.
Ještě je nutné rozlišit bodové a plošné zdroje. Pro určení se používá následující empirické
pravidlo: Zdroj je bodový, pokud jeho vzdálenost je 20x větší než příčný rozměr (úhlová
velikost) (Kolář et al., 1997).
U plošného zdroje se pak radiometrické veličiny určují integrací přes prostorový úhel, odkud
záření přichází.
V případě viditelné čísti spektra se používají fotometrické veličiny a ne radiometrické.
Tabulka 5 Fotometrické veličiny (Kolář et al., 1997)
veličina symbol fyzikální rozměr
světelná energie Qv lm*s
světelný tok Φv lm
světelné vyzařování Mv lm*m-2
osvětlení Ev lux=lm*m-2
svítivost Iv cd=lm*sr-1
jas Lv nit=cd*m-2
6 Zdroje záření
Přírodní zdroje záření využívají pasivní metody DPZ, kdy se registruje přicházející záření,
jehož vznik nebyl iniciován v souvislosti s měřením. Pasivní metody se rozdělují na přímé
a nepřímé – v prvním případě sledujeme odražené záření, zatímco u nepřímých metod je
sledováno druhotně vyvolané záření např. emitované tepelné záření zemského povrchu
zahřátého dopadajícím zářením Slunce. Naopak aktivní metody DPZ využívají umělé zdroje
záření, které vysílají v přímé souvislosti s měřením.
6.1 Přírodní zdroje
K nejvýznamnějším přírodním zdrojům záření, měřeného při DPZ, patří Slunce a Země.
V případě Slunce jde zpravidla o použití pasivní přímé metody, zatímco u Země se uplatňuje
zejména pasivní nepřímá metoda.
6.1.1 Slunce
Záření Slunce se modeluje pomocí černého tělesa o povrchové teplotě 6000 K, což odpovídá
našim znalostem o skutečné teplotě povrchových vrstev Slunce. Pro modelování
ultrafialového a infračerveného záření se používají černá tělesa s odlišnou teplotou –
4500 K pro UV a 5000 K pro IR záření. Tyto odchylky se vysvětlují vlivem průchodu záření
sluneční chromosférou.

12
Obrázek 4 Sluneční spektrum ve vesmíru, na zemském povrchu a model černého tělesa o teplotě 6000K (podle Silva in
Meer, 1992)
Vysvětlivky: wavelength vlnová délka, spectral radiant emittance spektrální intenzita vyzařování.
Intenzita slunečního záření mimo (významného) dosahu atmosféry Země se z dlouhodobých
měření jeví jako konstantní s hodnotou 1367 Wm-2
. Maximum slunečního záření
(neovlivněného atmosférou) je vyzařováno na vlnové délce 0,55 μm, což odpovídá zelené
části viditelného spektra. Nemůže být proto překvapením, že využívání slunečního záření
organismy je preferováno právě v této části spektra. Celkově 98 % výkonu slunečního záření
připadá na interval vlnových délek od 0,3 do 4 μm.
6.1.2 Země
Záření Země se modeluje s využitím černého tělesa o teplotě 300 K. S tím koresponduje
průměrná teplota vzduchu u zemského povrchu 14◦ C (Farský, Matějček 2008). Modelové
záření dosahuje maxima na vlnové délce 10 μm. Pokud srovnáme intenzitu záření Slunce
a Země, pak k jejich vyrovnání v modelové situaci dochází na vlnové délce 3 μm; u kratších
vlnových délek je silnější záření Slunce, u delších vlnových délek záření Země (a všech
objektů „běžné“ teploty).
6.2 Umělé zdroje záření
K hlavním umělým zdrojům záření, využívaných v aktivních metodách DPZ, patří radar
(mikrovlnné záření) a laser (především viditelné a infračervené záření).
Intenzita radarového záření E závisí na výkonu vysílače W a zisku antény G.
24 r
GWE
kde r je vzdálenost od antény.

13
Radar pracuje v pulzním režimu. Vyšle záření v krátkém pulzu (řádově v μs) a následně
přijímá odražené záření, které se k němu prací zpět. Díky soustředění vysílání do krátkého
pulzu dosahuje mnohem většího vysílacího výkonu než by tomu bylo při kontinuálním
vysílání. Pulzní výkon Wp je přímo úměrný výkonu vysílače a nepřímo úměrný době trvání
pulsu τ a frekvenci opakování pulsů fp.
p
pf
WW
Vysílané záření radaru je polarizované do horizontální nebo vertikální roviny (H, resp. V)
a rovněž se přijímá pouze horizontálně nebo vertikálně polarizované záření. Vznikají tak
4 kombinace uspořádání měření (polarizace vysílaného versus přijímaného záření,
označované jako HH, HV, VH, VV), které se využívá při zkoumání krajinných objektů (např.
vegetace).
Záření radaru je směřované do úzkého paprsku. Jeho největší intenzita je v ose antény.
7 Interakce s prostředím
Parametry elektromagnetického záření se nemění, pokud se záření šíří v homogenním
prostředí. Jakákoliv nehomogenita způsobí změnu elektromagnetických i geometrických
vlastností záření. Tyto změny závisí na fyzikálních vlastnostech nehomogenit.
Přítomnost nehomogenity nebo obecně změna prostředí bývá doprovázena existencí rozhraní.
Dopadající elektromagnetická vlna indukuje na hranici 2 prostředí oscilační pohyb
elektrických nábojů a to způsobí vznik sekundární elektromagnetické vlny. Ta se od
dopadající elektromagnetické vlny liší - intenzitou, vlnovou délkou, polarizací i směrem
šíření. Pro sekundární elektromagnetickou vlnu rozlišujeme následující případy:
Odražené záření M - sekundární vlna se šíří do stejného prostředí jako dopadající.
Pohlcené záření M - sekundární vlna se šíří do 2.prostředí a v něm je celá pohlcena; zvýší
se tak vnitřní energie 2.prostředí.
Prošlé záření M - sekundární vlna se šíří do 2.prostředí a prochází až za něj. Malé rozměry
a úroveň absorbce ve 2.prostředí tedy nestačily na úplné pohlcení sekundární vlny.
Rozptýlené záření - při malých rozměrech tělesa sekundární vlna mění směr a ohýbá se
kolem tělesa. Jev je výsledkem interference primární a sekundární elektromagnetické vlny.
Pro praktické účely (zejména charakteristickou vlastnost rozhraní) je vhodné uvádět místo
absolutních hodnot velikosti záření sekundární vlny jejich relativní vyjádření vzhledem
k intenzitě dopadajícího záření. Zavádíme tedy:

14
Odrazivost ρ
E
M
Pohltivost α
E
M
Propustnost τ
E
M
Jde o poloprostorové veličiny (je nezbytné zjistit záření sekundární vlny odcházející do celého
poloprostoru za rozhraním), což způsobuje problémy při měření.
Veličiny zpravidla silně závisí na vlnové délce použitého záření, proto jsou to spektrální
charakteristiky. Rozdílné chování v různých částech viditelného spektra způsobuje barevnost
objektů.
Podle zákona zachování energie musí platit, že součet intenzity záření všech forem sekundární
vlny se rovná intenzitě záření primární elektromagnetické vlny.
EMMM
Z toho vyplývá, že:
1
Veškeré pohlcené záření musí být zase vyzářeno (byť na jiné vlnové délce) a proto platí, že:
Z toho vyplývá, že:
1
Pokud těleso nepropouští žádné záření (je tedy „neprůsvitné“), platí, že:
1
Tím se vztahy mezi jednotlivými složkami sekundárního záření zjednodušují.

15
7.1 Odraz
Při odrazu zkoumáme tedy tu část sekundární elektromagnetické vlny, která se vrací do
stejného prostředí, odkud přišlo primární záření.
V idealizovaném případě platí, že z hlediska geometrie úhel dopadu se rovná úhlu odrazu.
Rovněž za teoretických předpokladů lze vypočítat intenzitu odraženého záření z Fresnelových
rovnic (Kalus, 2004).
Obrázek 5 Lom a odraz na rozhraní (http://www.k-wave.org/documentation/example_tvsp_snells_law.php)
Velikost odrazu popisujeme pomocí Fresnelova koeficientu odrazu R, což je poměr intenzit
elektrického pole odraženého ku dopadajícímu (zvlášť pro obě složky horizontální
a vertikální, tj. H a V).
h
h
hE
ER
'
v
v
vE
ER
'
Vztah mezi odrazivostí ρ a koeficient odrazu je dán vztahem (Halounová, Pavelka, 2005):
21
122
R
Velikost horizontální složky odraženého záření je pak určena vztahem:
2
22
sin
sinhR
a velikost vertikální složky odraženého záření:
2
22
tan
tanvR

16
V případě kolmého dopadu je θ=0 a R=Rh=Rv.
Zpravidla prvním prostředím je vzduch. Intenzitu odraženého záření pak ovlivňuje hlavně
relativní permitivita materiálu, na který záření dopadá a od kterého se odráží.
Velikost odrazu také výrazně závisí na vlnové délce použitého záření.
Pro idealizovaný případ musí ale platit 2 předpoklady:
Povrch rozhraní je dokonale rovný.
Obě prostředí jsou dokonale homogenní.
Dokonale rovný povrch rozhraní se označuje jako zrcadlový; odraz na něm označujeme jako
zrcadlový odraz.
Zpravidla však rozhraní obsahuje řadu nerovností, které lze aproximovat řadou dokonale
rovných plošek o malém rozměru s různým sklonem a orientací. Pokud je jejich sklon
a orientace nahodilý (a velikost přibližně stejná), získáme difúzní odraz, který je chápán jako
opak zrcadlového – difúzní odraz nemá žádný preferovaný směr, ale ve všech směrech je
záření odráženo stejně (bez ohledu na směr a úhel dopadajícího záření). Vhodným příkladem
je čerstvý sníh.
Obrázek 6 Vícesměrný odraz záření na nerovnostech povrchu
Výsledné záření je zpravidla součtem zrcadlové a difúzní složky odraženého záření.
Kdy je možné difúzní složku zanedbat a prohlásit povrch za dostatečně hladký, nám udávají
kritéria. Pro větší část spektra se používá Rayleighovo kritérium. Podle něj je povrh
považován za hladký, pokud:
cos8 h

17
Je zřejmé, že splnění podmínky závisí nejen na velikosti nerovností h (maximální výška
nerovností), ale i na vlnové délce dopadajícího záření a úhlu dopadu θ.
Ve výsledku drsný povrch (způsobující difúzní odraz) ve viditelném spektru může být
hladkým povrchem (s dominujícím zrcadlovým odrazem) v mikrovlnné části spektra.
Pro mikrovlnný obor se používá Fraunhoferovo kritérium, které vyžaduje pro hladký povrch
proti Rayleighovu kritériu pouze čtvrtinovou výšku nerovností.
7.1.1 Nehomogenity
Dokonale homogenní složení materiálu je teoretickým případem, každý materiál obsahuje
určité příměsi. K povrchu materiálu je jejich výskyt zpravidla četnější. Na povrchu (na
rozhraní) se často nachází voda, která, jak víme, má velmi odlišné chování od ostatních
materiálů. Tyto nehomogenity ovlivní průběh interakce, protože vznikají další rozhraní, na
kterých dochází k lomům a dalším odrazům. Většinou však jde o zanedbatelný vliv chyb,
vyjma obor mikrovlnného a delší záření.
K popisu je nutné charakterizovat velikost absorbovaného záření. Prostupující záření podél
dráhy tlumeno exponenciálně
d
z
eEzE
)0()(
cosd
Eτ je intenzita elektrického pole procházející vlny, z vzdálenost od povrchu a γ útlumový
koeficient prostředí. Parametr d je tloušťka podpovrchové vrstvy. Do této hloubky je
příspěvek prostředí považován za významný. V této hloubce klesne E na 37%.
Útlumový koeficient závisí na materiálu (včetně vlhkosti!) a nepřímo úměrně na vlnové délce.
7.1.2 Určování odrazivosti
Praktické určování odrazivosti je ale velmi problematické, protože materiálové vlastnosti
komplexního prostředí jsou nezjistitelné, stejně jako miniaturní geometrické podmínky. Navíc
měření celkového odraženého záření (v poloprostoru) je stěží realizovatelné.
Pro praktické zjišťování se proto více používá určování koeficientu záře, který je definován
jako poměr záře zkoumaného objektu k záři standardu za stejných podmínek (geometrie,
intenzita záření).

18
)','('
)','(')',',,(
sL
LR
Požadavky na standard:
difúzní povrch (snížit směrovou závislost),
dokonalý odražeč (co nejvyšší podíl odraženého záření, minimální absorbce).
Vyhovují jemně krystalické bílé látky jako BaSO4 nebo MgO. Pro každý standard se udávají
korekční tabulky.
7.1.3 Albedo
Odrazivost přírodních objektů je zpravidla uváděna pomocí albeda. Pomocí albeda lze měřit
odrazivost v různé výšce nad povrchem. Albedo je definováno jako poměr toku záření
odcházející z atmosféry ku toku záření přicházejícímu do atmosféry. Zahrnuje tedy i
rozptýlené záření.
Albedo =1
2
7.1.4 Diagram odrazivosti
Diagram odrazivosti popisuje směrovou závislost koeficientu záře. Základní čtyři typy
povrchu jsou (viz obr. 7) (Kolář et al., 1997):
1. Difuzní povrchy – písek, čerstvý sníh
2. Zrcadlové povrchy – led, skalní bloky
3. Kombinované povrchy – obilí, rýže
4. Rýhované povrchy – některé typy vegetace

19
Obrázek 7 Diagramy odrazivosti pro difúzní povrch (a), zrcadlový povrch (b), kombinovaný povrch (c) a rýhovaný
povrch (d) (Kolář, Halounová, Pavelka, 1997)
Velikost koeficientu záře se může výrazně měnit podle směru.
Praktickým problémem při měření v důsledku výrazné směrové změny je především
zrcadlový odraz vody (až 10x vyšší).
7.2 Vliv atmosféry
Atmosféra leží vždy mezi měřící aparaturou a pozorovaným objektem. Zpravidla je chápána
jako překážka šíření záření v obou směrech. V některých případech je však atmosféra přímo
předmětem zkoumání.
Vliv atmosféry na záření závisí na:
délce dráhy,
velikosti emitovaného signálu,
atmosférických podmínkách,
vlnové délce.
Záření je v atmosféře ovlivňováno především:

20
rozptylem (způsobí vyšší naměřené hodnoty u kratších vlnových délek),
pohlcováním (způsobí snížení měřeného záření, dochází k němu více na delších
vlnových délkách).
Méně je ovlivňováno emitované záření (TIR).
7.2.1 Atmosféra
Atmosféra je dynamickým systémem, jejíž parametry jsou funkcí souřadnic x, y, z a času t.
K jejímu zjednodušení nahrazujeme horizontálně homogenním systémem, kde parametry jsou
pouze funkcí výšky z a času t.
Hustota atmosféry klesá exponenciálně s výškou. Polovina její hmotnosti je soustředěno do
výšky 5 km. Vertikální profil atmosféry zahrnuje následující vrstvy:
Troposféra – sahá do výšky průměrně 11 km, na pólech pouze 8-9 km a na rovníku
až 18 km. Troposféra obsahuje 75% všeho vzduchu. V troposféře probíhá většina
meteorologických jevů a procesů. V této vrstvě teplota klesá 0,65oC / 100 m.
Stratosféra dosahuje do výšky do 50-60 km, teplota kolísá mezi -45o až -75
o C.
Mezosféra sahá do výšky 80 km. Přechod mezi mezosférou a stratosférou se
označuje jako ionosféra.
Termosféra dosahuje do výšky 500 km.
Exosféra sahá do výšky 20000 až 70000 km. V této výšce už je atmosféra složena
pouze z nejlehčích plynů, tedy H2 a He.

21
Obrázek 8 Výškový profil zemské atmosféry (http://en.wikipedia.org/wiki/Atmosphere_of_Earth)
Vysvětlivky: Trophosphere troposféra, stratosphere stratosféra, mesosphere mezosféra, thermosphere termosféra.
Atmosféry se skládá ze 3 základních složek - suchý čistý vzduch (bez znečišťujících příměsí),
voda ve všech skupenstvích a znečišťující příměsi.
Čistý vzduch se skládá z následujících plynů - 78,1% N2, 20,9% O2, 0,9% Ar, 0,03% CO2
a další v menším množství. Zastoupení plynů se nemění až do cca 100 km vyjma 2 plynů:

22
CO2 – jeho obsah závisí na čase (v noci je CO2 více než ve dne) a rovněž závisí na
místě (nad oceány je ho méně než nad pevninou), ke změnám dochází i lokálně,
O3 – jeho obsah závisí na čase a výšce (ozónová vrstva kolem 22 km).
Voda v atmosféře má velmi proměnlivý obsah 0-2%. Je obsažena pouze ve spodních 10 km
výšky. Kapky nebo krystalky vody o průměru 0,001-0,01mm vytváří oblaka. Po agregaci na
velikost 0,x mm se z nich stávají srážkové částice a vypadávají z oblaků.
Znečišťující příměsi v atmosféře se označují jako aerosoly. Reprezentují pevné i kapalné
částice ve vzduchu, ať již jsou přírodního nebo antropogenního původu. Aerosoly
charakterizuje jejich složení, koncentrace a velikost částic. Koncentrace a velikost částic spolu
úzce souvisí - nepřímo úměrně. Jako kouřmo označujeme situaci, kdy jsou ve vznosu ve
vzduchu kapalné aerosoly. Zákal reprezentuje pevné aerosoly ve vzduchu.
Koncentrace aerosolových částic se mění s výškou – 60 % aerosolových částic se nachází ve
výšce do 1 km a 80 % aerosolových částic do 5 km.
Aerosoly způsobují rozptyl záření v atmosféře. Z atmosféry jsou vymývány deštěm.
7.3 Rozptyl v atmosféře
K rozptylu záření dochází na malých částicích v atmosféře.
Elektrické pole vlny dopadající na částici způsobí polarizaci, vznikne dipól, který se při
oscilaci podél určitého směru chová jako miniaturní anténa, která generuje sekundární
elektromagnetickou vlnu. Složením primární a sekundární vlny vzniká rozptýlené záření.
Podle relativní velikosti částic rozlišujeme rozptyl na:
molekulách plynu (molekulový, Rayleighový rozptyl),
aerosolech (aerosolový, Mieový rozptyl).
Rozlišení typu rozptylu se provádí s pomocí rozměrového parametru a, který se vypočte jako
ra
2
kde r je průměr částice.
Rayleighový rozptyl nastává, pokud je <=0,2, v opačném případě jde o Mieový rozptyl.
Zvětšení vlny má tedy stejný efekt jako zmenšení částice. Dešťové kapky jsou „velké“ pro IČ
záření, ale „malé“ pro MW záření.
Velikost rozptylu na částici se udává pomocí průřezu úhlového rozptylu σ(θ), který je
definován jako podíl zářivosti rozptýleného záření ve směru θ k intenzitě dopadajícího záření
E, tedy:

23
E
I )()(
Průřez celkového rozptylu σ reprezentuje integrální hodnotu přes celý prostor.
Jednotlivé typy rozptyly záření se sčítají. Celkový rozptyl je tedy dán součtem rozptylu záření
molekulového a aerosolového:
am
Rozptylové vlastnosti atmosféry značně souvisí s vlhkostí, zvláště je-li vlhkost větší než
40 %. V takové situaci dochází k vícenásobnému odrazu na částicích a klesá směrová
závislost. Proto je v husté mlze záření izotropní a nemůžeme určit směr, odkud přichází.
K rozptylu na molekulách (podle Rayleigha) dochází především u viditelného záření.
Velikost rozptylu se vypočte jako
42
23
3
)1(8
N
nm
kde n je index lomu, N počet molekul v objemové jednotce a λ vlnová délka.
Ze vztahu vyplývá, že rozptyl je nepřímo úměrný vlnové délce, dokonce 4.mocnině. To
způsobuje velmi velké rozdíly v rozptylu jednotlivých složek viditelného záření (světla) –
modré světlo je odchylováno mnohem více než červené. Důsledkem je např. modré zabarvení
oblohy (pozorujeme rozptýlené modré záření) nebo i červánky (Slunce nízko nad obzorem
znamená mnohem delší dráhu záření v husté přízemní atmosféře, a to vede k rozptýlení
a odchýlení modrého světla z dráhy a relativní nárůst podílu červené složky světla (intenzita
červené roste s rostoucí koncentrací aerosolů ve vzduchu, zejména vodních kapek).
Obrázek 9 Rozdílný rozptyl modrého a červeného světla na stejně velké částici (Meer, 1992)
Vysvětlivky: blue light - modré světlo, red light - červené světlo, particle smaller than λ - částice menší než λ.

24
Obrázek 10 Rozptyl modrého záření v atmosféře během dne (Meer, 1992)
Vysvětlivky: atmosphere – atmosféra, Earth - Země, blue sky – modrá obloha, daytime – denní doba
Obrázek 11 Rozptyl všech složek světla při průchodu atmosférou během západu Slunce, v ose zůstává jen červená
(Meer, 1992)
Vysvětlivky: Earth - Země, blue – modrá, red – červená, sunset – západ slunce
Rozptyl na aerosolech (Mieový) se vypočte následovně:
BaN
A
kde A, B jsou parametry stanovené dle typu aerosolu. Lze říci, že velikost rozptylu už není tak
výrazně závislá na vlnové délce záření, jak tomu bylo u molekulového rozptylu.
Hodnoty všech parametrů (A, B i N) se značně liší pro jednotlivé situace a je problematické je
určit. Proto správné hodnocení aerosolového rozptylu se řadí k nejhorším úkolům.
Nejsilnější rozptyl na aerosolech se projevuje pro viditelné a NIR záření.
7.4 Absorbce v atmosféře
Dopadající záření je absorbováno částicemi atmosféry, u kterých tím dochází ke zvětšení
vnitřní energie. Toto zvětšení vnitřní energie se projevuje jako zvýšení rotačních a oscilačních
pohybů atomů a molekul, které bývá doprovázeno navýšením energie elektronů. Nejlépe je

25
pohlcováno záření o vlnových délkách odpovídající těmto formám vnitřní energie částic
atmosféry (při těchto pohybech dochází k emisím takového záření). Proto je nejsilněji
absorbováno záření v infračervené a mikrovlnné části spektra, které vzniká právě v souvislosti
s rotačními a oscilačními pohyby molekul.
Pohlcování způsobují v atmosféře především plyny a jde o výrazně selektivní jev. Jak je
zřejmé z následujícího obrázku, propustnost atmosféry kolísá mezi 0 a 100 % v závislosti na
vlnové délce. Základní charakteristická pásma zvýšené absorpce jednotlivých plynů
v atmosféře uvádí tabulka 6.
Pro dálkový průzkum Země je pochopitelně zásadní provádět měření v těch částech spektra,
kde je pohlcování atmosféry nízké. Tyto pro pozorování a měření příznivé intervaly vlnových
délek označujeme jako atmosférická okna.
Obrázek 12 Schéma atmosférické absorbce v závislosti na vlnové délce záření (podle Estes in Meer, 1992)
Vysvětlivky: percent transmission – propustnost v %, wavelength – vlnová délka
Tabulka 6 Hlavní absorpční pásy atmosféry (Kolář et al., 1997)
molekula střed absorpčního pásu (μm)
H2O 0,9; 1,1; 1,4; 1,9; 2,7; 6,3
CO2 2,7; 4,3; 15
O3 9,6
CO 4,8
CH4 3,3; 7,8
N2O 4,6; 7,8
Tabulka 7 Hlavní atmosférická okna (Dobrovolný, 1998)
Část spektra Interval vlnových délek
(μm)
UV/viditelné 0.30-0.75
0.77-0.91
Blízké infračervené 1.00-1.12
1.19-1.34
1.55-1.75
2.05-2.40

26
střední infračervené 3.50-4.16
4.50-5.00
termální infračervené 8.00-9.20
10.20-12.40
17.00-22.00
Každé atmosférické okno má jinou propustnost τ. K větším vlnovým délkám λ se τ snižuje (až
po mikrovlnné záření). Např. I.okno (0,72-0,94) má propustnost 0,91 %; II.okno (0,91-1,13)
0,89 %, a VII.okno (4,3-6,0) už jen 0,31 % !
7.5 Celková propustnost atmosféry
Celkový útlum v atmosféře je vyjádřen útlumovým koeficientem γ(x):
)()()()()()( xxxxxx am
kde x je délka paprsku v atmosféře. Ta se určí na základě tloušťky atmosféry z jako:
cos
zx
Bourguerův zákon udává závislost propustnosti na optické tloušťce atmosféry.
)()( xTex
kde T(x) je optická tloušťka atmosféry, která se vypočte jako:
x
dxxxT0
)()(
Tím je zřejmý vztah mezi útlumový koeficientem γ(x) a propustností atmosféry.
Rozdělení dopadajícího slunečního záření a jeho ztráty v atmosféře a absorpcí po dopadu na
zemský povrch ukazuje obrázek 13. V průměru pouze 8 % z celkového záření vstupujícího do
atmosféry se odrazí od jejího povrchu. Při měření záření senzorem na družici tedy máme
k dispozici jen asi 4 % slunečního záření, které se odrazilo od pozemních objektů (cca 47 %
záření je pohlceno při jednom průchodu atmosférou). V senzoru ovšem budeme registrovat
také záření odražené od mraků a rozptýlené a emitované atmosférou.

27
Obrázek 13 Průměrné rozdělení dopadajícího slunečního záření (Meer, 1992)
Vysvětlivky: incoming solar radiaton – přicházející sluneční záření, absorbed by ozone – absorbováno ozónem,
reflected from clouds – odražené od mraků, absorbed by dust, gases – absorbováno prachem a plyny, reflected from
ground – odražené od země, absorbed by ground – absorbováno zemí
7.6 Přenosová funkce atmosféry
Každá radiometrická veličina měřená pro DPZ (zpravidla na družici) díky atmosféře zahrnuje
základní složky:
odrazivost/emisivitu zemského povrchu modifikovanou rozptylem a absorpcí
atmosféry,
rozptýlené a emitované záření atmosféry,
případné odražené záření od mraků.
V závislosti na předmětu zkoumání se snažíme:
odstranit vliv atmosféry (pro pozorování povrchu),

28
odstranit vliv povrchu (pro pozorování atmosféry).
Obrázek 14 Složení spektrální záře v měřící aparatuře (Kolář et al., 1997)
Spektrální zář objektu na zemském povrchu, měřenou ve vzdálenosti x, označujeme jako
zdánlivou zář Lλ(x), která se skládá ze spektrální záře tohoto objektu na Zemi a ze spektrální
záře atmosféry:
)()0()()()()( xLLxxLxLxL AZAZ
Přenosová funkce atmosféry P(x) udává poměr mezi spektrální září objektu ve vzdálenosti x
a vzdálenosti 0 (tedy bez vlivu atmosféry). Určuje, jak se s výškou (délkou dráhy v atmosféře)
mění zdánlivá zář objektu.
)0(
)()(
ZL
xLxP
Změna záře s výškou závisí na záři okolních objektů a na tom, zda převládá v atmosféře
rozptyl nebo absorpce. Pokud převládá rozptyl a přitom záře okolních objektů je větší, platí,
že zdánlivá zář objektu s výškou roste. Při převládajícím rozptylu a naopak menší září
okolních objektů ve srovnání se zkoumaným objektem, dochází s poklesu zdánlivé záře
objektu s výškou.
Pokud v atmosféře převládá absorpce, pak zdánlivá zář objektu s výškou klesá.
Při zkoumání záře u vlnových délek nad 3 μm zjistíme, že výsledek závisí také na teplotě
atmosféry podél paprsku, protože dochází k ovlivnění emisivitou atmosféry.

29
Podobně se mění i koeficient záře R (obr. 15).
Obrázek 15 Koeficient záře písku (a) a vody (b) při měření z výšky 250 km (1) a u povrchu (2) (Kolář et al., 1997)
Současně dochází ke změnám spektrálního kontrastu C12 různých objektů, který se s výškou
mění.
2
212,1
L
LLC
K určení přenosové funkce atmosféry je možné využít měření záře pro 2 homogenní objekty
umístěné vedle sebe. U nich předpokládáme stejný stav atmosféry, a proto vyloučíme člen
popisující zář atmosféry v obou rovnicích.
)()0()()( 11 xLLxxL AZ
)()0()()( 22 xLLxxL AZ
Jinou možností je použití etalonu, což reprezentuje malý objekt umístěný v místě pozorování.
Při jednom měření se zjišťuje spektrální záře objektu Lp, při druhém spektrální záře objektu
včetně umístěného etalonu Le. Předpokládá se, že stav atmosféry mezi oběma měřeními se
nezměnil. Metoda opět umožňuje řešit soustavu 2 rovnic o 2 neznámých (τ(x) a LA(x)).
)()0()()( xLLxxL App

30
)())0()0()(()( xLLLxxL Apee
Jednou z nejjednodušších metod eliminace příspěvku atmosféry je využití zdánlivé záře (či
odrazivosti) vody v blízkém infračerveném pásmu. V tomto pásmu je odrazivost čisté vody
téměř nulová, zdánlivá odrazivost zjištěná senzory tedy reprezentuje příspěvek atmosféry.
8 Krajinné objekty a jejich identifikace a hodnocení
Intenzita odraženého či emitovaného záření závisí na elektromagnetických vlastnostech látky,
ze které se skládá zkoumaný objekt. Vlastnosti závisí na druhu látky, jejím fyzikálním stavu
a stavu okolí. Také se však mění v závislosti na vlnové délce použitého záření – mluvíme
o spektrální závislosti. Rozdíly v reakci na změnu vlnové délky mohou být pro objekty
typické, a proto zkoumáme a využíváme v DPZ spektrální chování objektů. Zářivé vlastnosti
daného objektu popisuje jeho spektrální charakteristika (závislost odrazivosti/emisivity na
vlnové délce). Určují se experimentálně.
Ze vztahu k hodnoceným charakteristikám lze zjistit, která spektrální pásma jsou nejvhodnější
pro měření a následující zpracování.
Ze spektrálního chování lze pro každý objekt odvodit spektrální příznaky. Jsou
charakteristické pro každý typ povrchu. Dva objekty, které se chovají v 1 pásmu podobně
a nelze je rozlišit, mohou mít v jiném pásmu zcela odlišné chování. Na tom je postavena
jejich možnost rozlišení.
Při rozpoznávání objektů nemusíme využívat jen spektrální závislosti. Pokud je sledovaný
objekt časově proměnný, může být změna v čase pro něj typická. Příkladem je třeba využití
rozdílné fytogeneze rostlin, kdy některé druhy lze snadno rozlišit díky jejich rozdílnému
vývoji.
Celkově můžeme hodnotit druhové parametry, které určují příslušnost objektu k druhu. Jde
o kvalitativní informaci, např. rozlišení základních typů krajinného povrchu jako jsou trvalé
travnaté porosty od obilovin, rybníky, silnice atd.
Vedle druhových parametrů se mohou hodnotit stavové parametry, které popisují stav
objektu. K příkladům patří třeba vlhkost půdy, příměsi, výška stromů, jejich stáří, hustota
porostu atd. Často jsou to kvantitativní údaje, méně často kvalitativní.
Kombinací druhových a stavových charakteristik existuje v realitě velké množství a to vede
až k individuálnímu charakteru spektrálních charakteristik. Nicméně i přes velkou variabilitu
objektů na zemském povrchu a jejich stavů se dají pro potřeby DPZ vyčlenit tři typy povrchu
s typovým spektrálním projevem. Je to vegetační povrch, voda a povrch bez vegetace
(půdy, horniny, zeminy, antropogenní povrchy). Jejich typové spektrální křivky jsou uvedeny
na obr.
Podrobnější spektrální charakteristiky různých látek jsou uloženy ve spektrálních knihovnách,
které jsou využívány v obrazové spektrometrii (hyperspektrální měření).

31
Obrázek 16 Spektrální odrazivost vody (1), vegetace (2), suché půdy (3) a vlhké půdy (4) (Kolář et al., 1997)
8.1 Vegetační povrch
Vegetační povrch se vyskytuje téměř na všech snímcích (vyjma pouštních a polárních
oblastí). Zpravidla ho tvoří travní porosty, zemědělské kultury, jehličnaté a listnaté lesy.
V klasickém DPZ využívajícím snímky nízkého až vysokého rozlišení je předmětem
zkoumání ne 1 rostlina, ale společenství. Teprve u záznamů s velmi vysokým rozlišením se
pracuje i s jednotlivými stromy (i když i zde vyžadujeme zpravidla plošné a nikoliv
individuální mapování).
Spektrální projev porostu není jednoduchý, ale je výslednicí odrazivých vlastností
jednotlivých částí rostlin a pozadí (zpravidla půdy nebo vody). Je zřejmé, že vzhledem
k různorodosti jednotlivých částí stromu (listy, kmen a větve, květy, plody), se budou výrazně
lišit i jejich spektrální charakteristiky. V obraze však dominují příspěvky od listů, proto je
potřebné se jimi zabývat především.
Vedle vlastního složení listů se na výsledku interakce projevuje i geometrické uspořádání
měření, zejména v případě šikmého snímání. Odrazivost listů ovlivňuje úhlová závislost
odrazivosti (a tu opět ovlivňuje struktura listu a stáří). Běžně jsou vegetační povrchy difuzní
(tedy de facto nezávisí na směru), některé listy však mají voskové povrchy vytvářející
zrcadlový odraz, u obilí je možné se setkat s kombinovaným odrazem a pro některé druhy
vegetace je typický rýhovaný diagram odrazivosti.
8.1.1 Spektrální vlastnosti listu
List obsahuje typicky buněčnou tekutinu, celulózy, tuky, lignin, proteiny, cukry a oleje.
Výsledná spektrální charakteristika je dána výsledkem interakce záření s jednotlivými látkami
v listu a bude se pochopitelně lišit podle jejich charakteru a zastoupení. Kvantitativně se
průběh spektrálních vlastností u jednotlivých druhů rostlin (listů) liší, ale průběh křivek je
podobný. Typicky má křivka 3 hlavní části:
Oblast pigmentační absorpce 0,4 – 0,7 μm
Oblast vysoké odrazivosti (buněčné struktury) 0,7 – 1,3 μm

32
Oblast vodní absorpce 1,3 – 3 μm
Obrázek 17 Průběh odrazivosti typického listu a absorpce vody v rozsahu 0.4 až 2.6 μm (Meer, 1992)
Vysvětlivky: percent reflectance (for leaf) or absorbance (for water) – odrazivost v % (pro list) nebo pohltivost (pro
vodu), pigment absorption – pigmentační absorpce, water absorption - vodní absorpce, leaf reflectance – odrazivost
listů
Obrázek 18 Výsledek interakce záření ve viditelné (RGB) a infračervené (IR) části spektra s vegetací (NRC,
nedatováno)

33
8.1.1.1 Oblast pigmentační absorbce
Oblast pigmentační absorpce reprezentuje viditelnou oblast elektromagnetického záření.
Viditelné záření je listem většinou absorbováno, zčásti projde na druhou stranu listu, malá
část záření se odrazí. Na tom se podílí především pigmentační látky v listu, kterými jsou:
Chlorofyl - tvoří až 65 % listového pigmentu. Je to zelený pigment - pohlcuje
většinu energie v modrém (0,45 μm) a červeném světle (0,65 μm), naopak
maximum odrazivosti má v zelené barvě (0,54 μm).
Karoten, xanthofyl – jsou to žluté pigmenty, které pohlcují energii především v
modrém světle (0,45 μm). Chlorofyl pohlcuje záření ve stejném pásmu, a protože
ho zdravá zelená rostlina obsahuje větší množství, není přítomnost těchto žlutých
pigmentů patrná. Při ztrátě chlorofylu (může být způsobeno stárnutím, chorobou
nebo jen stresem rostliny) se žlutý pigment začne projevovat a listy zežloutnou.
Anthokyan – červený pigment, produkovaný některými rostlinami na podzim
místo chlorofylu.
Množství chlorofylu ovlivňuje tvar spektrální křivky. Větší obsah chlorofylu způsobuje
prohloubení absorpčního pásu 0,68 μm, jeho posun do větších vlnových délek a snížení
maxima odrazivosti v zelené. Z hlediska interpretačních znaků je nejvýznamnější uvedený
posun minima v červené části spektra směrem k delším vlnovým délkám. Přesná poloha
počátku vysoké odrazivosti v NIR může udávat obsah chlorofylu. Obsah chlorofylu závisí na
obsahu N2 v půdě a může být tak jeho indikátorem.
8.1.1.2 Oblast vysoké odrazivosti
Oblast vysoké odrazivosti odpovídá pásmu blízkého infračerveného záření (BIČ, NIR)
elektromagnetického spektra. Označuje se také jako oblast buněčné struktury, protože
hlavním faktorem, který v této části spektra určuje intenzitu odraženého záření, je
morfologická struktura listu.
Oblast se vyznačuje velmi nízkou pohltivostí buněk a tedy vysokou odrazivostí. Na interakci
záření uvnitř listu má největší vliv celulóza, ze které jsou tvořeny buněčné stěny. Index lomu
celulózy je asi 1,4, čemuž odpovídá odrazivost ρ asi 6 % (Halounová, Pavelka, 2005).
Skutečná odrazivost listů je ale mnohem větší díky vícenásobnému odrazu uvnitř listu.
Navíc dochází u rostliny, resp. u společenství rostlin, k vícenásobnému odrazu ve vrstvách
listí, které celkově výrazně zesiluje odrazivost v této části spektra.
Pokud bychom předpokládali, že list 50 % záření odrazí i propustí, pak druhá vrstva odrazí
25 % původní záření (v případě plného pokrytí je ale jen polovina propuštěna opět horní
vrstvou) (obr. 19).

34
Obrázek 19 Princip rozkladu a skládání světla při průchodu více vrstvami
Odraz od spodních vrstev listoví tedy významně zvyšuje odrazivost. Na obr. 20 je možné
rozeznat, že odrazivost od 1. vrstvy dosahuje u vlnové délky 1 μm necelých 40 %, pak po
sečtení příspěvků vícenásobných odrazů mezi vrstvami dosahuje odrazivost asi 55 %.
Všimněme si rovněž, že reálný příspěvek tvoří odrazy až po 6. vrstvu, další vrstvy již
přispívají k navýšení odrazivosti zanedbatelně.
Obrázek 20 Navýšení odrazivosti odrazem záření na více vrstvách (Kolář et al., 1997)
Z toho vychází i výpočet indexu listové plochy LAI (viz dále).

35
Prudký nárůst odrazivosti z nízkých hodnot v červené části spektra do vysokých hodnot
v blízké infračervené části spektra je nejdůležitějším příznakem zelené vegetace a je na něm
založena řada vegetačních indexů.
Jednoduchý vegetační index VI se vypočte jako rozdíl odrazivosti v obou částech spektra. Je
však příliš ovlivňován konkrétní situací v ozáření (zejména rozdíly naměřené odrazivosti
v osvětlených versus zastíněných částech snímku), proto se využívají relativní indikátory,
především normovaný vegetační index NDVI (normalised difference vegetation index).
ČBIČRRVI
ČBIČ
ČBIČ
RR
RRNDVI
8.1.1.3 Oblast vodní absorpce
Oblast vodní absorpce (1,3 – 3 μm) odpovídá přibližně střednímu infračervenému pásmu (1,3
– 4 μm) elektromagnetického spektra. Jak název napovídá, je interakce záření s listem
ovlivňována především absorpcí záření vodou obsaženou v listech. Proto se na spektrální
křivce listu projevují nejvíce absorpční pásy vody na vlnových délkách 1,4 μm, 1,9 μm, 2,7
μm (hlavní vibrační pás vody); v menší míře pak i vedlejší absorpční pásy vody na 0,96 μm
a 1,1 μm.
8.1.1.4 Oblast termálního záření
Za oblastí vodní absorpce následuje oblast termálního infračerveného záření, odpovídající
intervalu vlnových délek λ = 3 – 15 (případně 25) μm. V této části spektra je pohltivost listů
velmi vysoká a tomu odpovídá nízká odrazivost jen asi 3-5 %. Současně je však velmi vysoká
emisivita (95 – 98 %), přirozeně odpovídající tepelnému vyzařování objektů na zemském
povrchu. Vztah mezi teplotou, intenzitou vyzařování a emisivitou lze použít pro zjištění
teploty listu.
8.1.1.5 Oblast mikrovlnného záření
Mikrovlnné záření lze použít pro mapování vegetačního povrchu i pro zjišťování stavových
charakteristik.
Lepší výsledky pro zjišťování různých stavových charakteristik vegetace jsou při použití
delších vlnových délek. Např. pro sledování různých stavových parametrů obilí jsou vhodná
pásma P (λ = 75 cm), L (λ = 18 cm) a C (λ = 6 cm). Podobně i pro rozdělení vegetace dle
rozdílného objemu. Kratší vlnové délky jsou vhodné spíše jen pro odlišení vegetačního
a nevegetačního povrchu.
K rozlišení různých druhů vegetace se s výhodou používá polarizované záření, zejména
výsledek stáčení polarizační roviny vegetací, tedy kombinace VH nebo HV (vysílání ve
vertikální polarizaci, příjem v horizontální polarizaci, resp. naopak).

36
8.1.2 Parametry ovlivňující odrazivost vegetace
Na prvním místě ovlivňuje spektrální charakteristiku druh rostliny. Mezi jednotlivými druhy
jsou rozdíly jak ve velikosti odrazivosti, tak v posunech minim a maxim odrazivosti a změny
tvaru křivek. Např. podle obr. 21 má tráva velmi nízkou odrazivost v modré a červené části,
velmi prudký nárůst odrazivosti do blízké infračervené části spektra a vysoké hodnoty
odrazivosti v ní, naopak borovice v tomto příkladu má slabé minimum v oblasti červené části
spektra a mírný nárůst do infračervené části, což způsobí velmi výrazné rozdíly ve
vegetačním indexu obou typů vegetace.
Často je potřebné rozlišení mezi jehličnatými a listnatými stromy. Zatímco ve viditelné části
spektra se pásma jejich odrazivosti překrývají, což znesnadňuje rozlišení, v blízkém
infračerveném spektru jsou již jejich intervaly odrazivosti výrazně odděleny a umožňují dobré
rozlišení (obr. 21).
Obrázek 21 Spektrální charakteristiky několika druhů rostlin

37
Vysvětlivky: grass . tráva, birch – bříza, pine – borovice, fir - jedle
Obrázek 22 Intervaly spektrálních křivek pro listnaté (hardwoods) a jehličnaté (conifers) stromy (Meer, 1992)
Velmi výrazný vliv na spektrální projekt vegetace má její fenologický stav. Vzrůst vegetace,
její dozrávání se pochopitelně přímo projevuje. K jejímu využití zpravidla potřebujeme více
snímků v různých časových obdobích během roku, kde lze podle rozdílů ve fenologickém
vývoji usuzovat na druh rostliny (např. rozlišení trvalých travnatých porostů a jednotlivých
druhů obilí).
S fenologickým stavem přirozeně souvisí i stáří vegetace. Pochopitelně projevy stárnutí vedou
k degradaci stavu vegetace ke změnám v jejích spektrálních projevech. Typickým příkladem
je třeba stárnutí listů, jejich žloutnutí, hnědnutí a opadávání a s tím související spektrální
projevy (obr. 23).

38
Obrázek 23 Stárnutí zdravého bukového listu během opadání (Meer, 1992)
Vysvětlivky: intermediate stage of senescence – střední stádium stárnutí, healthy – zdravý, dead brown leaf – mrtvý
hnědý list
K nejdůležitější stavovým parametrům patří obsah vody, který se velmi silně na spektrální
charakteristice projevuje.
Větší vlhkost vegetace se ve viditelné a infračervené části spektra projeví snížením
odrazivosti, především v pásech vody. V mikrovlnné části spektra naopak vyšší vlhkost
zvyšuje odrazivost.

39
Obrázek 24 Efekt vlhkosti na odrazivost kukuřičných listů (Meer, 1992)
Vysvětlivky: reflectance – odrazivost, wavelength – vlnová délka, moisture content – vlhkost
Pokud vlhkost typické vegetace klesne pod 55 %, dochází ke ztrátě části chlorofylu
a následnému zvýšení odrazivosti v červené části spektra (na 0,66 μm). Tím samozřejmě klesá
i vegetační index. Výrazné snížení vlhkosti však nepostihuje jen pigmentační oblast. Dochází
i ke změnám vnitřní struktury listů a zejména ke snížení množství listoví a tudíž k nižší
odrazivosti v blízké infračervené části spektra. V oblasti vodní absorpce se projeví nižší vodní
obsah zvýšenou odrazivostí. Zejména se ukazují změny v oblasti absorpčních pásů vody (1.4,
1.9 a 2.7 μm).
Obecně tedy výrazné snížení změny obsahu vody vede k vodnímu stresu a příslušným
změnám spektráPodobně reagují rostliny i na změny obsahu minerálů v půdě. Pro optimální
rozvoj rostliny musí být minerální látky v optimálním poměru. Pokud ne, projeví se změny ve
viditelné i infračervené části spektra. Zvláště citlivá je oblast 0,75 – 0,9 μm (tedy NIR).
Zatímco ve viditelné části spektra je ještě rostlina stále stejně zelená (a změny se neprojevují),
v blízké infračervené dochází již k výraznému poklesu odrazivosti v důsledku snížení vývoje
a počtu listů (omezení vícenásobného odrazu).
Podobně se projevuje obsah chemických látek v půdě resp. vodě. Většina těžkých kovů
nepůsobí příznivě na vývoj rostlin. Např. 6x vyšší obsah Cu vede k takovému snížení růstu
a počtu listů, že se v blízké infračervené části (na 0,8 μm) projeví pokles odrazivosti o 25 %.
Je známo, že vysoké obsahy kovů Ni, Co, Cr, Zn, Mn způsobují chlorózu rostlin, kdy je Fe
v rostlině vytlačováno právě těmito nahrazujícími kovy. Nedostatek chlorofylu se projeví

40
ztrátou zelené barvy, posunem maximální odrazivosti k vyšší vlnové délce (0,58 μm a dále),
tj. ke žloutnutí, a ke snížení odrazivosti v blízké infračervené části spektra. Špatný vývoj
rostlin je typický právě pro tzv. hadcové stepi. Pouze ojediněle vyvolává vyšších obsah
některých prvků intenzivnější růst rostlin. Např. přítomnost bóru vyvolává gigantismus
rostlin.
Další důvodem změny spektrálního chování může být změna zdravotního stavu. Imisní
zatížení stromů zejména v našich horách postižených dálkovým přenosem imisí
z neodsířených tepelných elektráren byla důvodem podstatných změn a vymírání smrkových
porostů zejména v sedmdesátých a osmdesátých letech minulého století. Vedle imisí se
výrazně projevuje i napadení stromů hmyzími škůdci. K typickým patří zejména napadení
jehličnatých stromů kůrovci, bukových porostů bekyní mniškou nebo jírovců klíněnkou
jírovcovou. K velkoplošnému sledování se s výhodou používají metody DPZ. Vliv infekční
choroby na spektrální chování vegetace je uveden na obr 25.
Obrázek 25 Změny spektrální křivky bukových listů vlivem infekce (24- listy zdravé, 21- listy s nekrózami) (Clevers,
1999)
Vysvětlivky: disease infection – infekce nemoci, reflectance - odrazivost, wavelength – vlnová délka

41
Vegetační povrch není homogenní ani dokonale pokrytý. Proto spektrální charakteristiky
vegetačního pokryvu ovlivňuje i uspořádání vegetace a pozadí. Pokud není porost hustý,
projevuje se vliv půdy, sněhu či kapalné vody v pozadí. Přitom rozdíl mezi odrazivostí půdy
a vegetace není tak výrazný a nebude tolik ovlivňovat výslednou spektrální charakteristiku,
jinak je tomu ale v případě vody – mezi vegetací a sněhem či vegetací a vodou existují
výrazné rozdíly v odrazivosti, což se projeví výraznými změnami výsledné smíšené spektrální
charakteristiky vegetačního pokryvu.
Hustotu vegetačního pokryvu udává index listové plochy LAI (leaf area index). Je to poměr
mezi plochou všech listů ku ploše základny vertikálního sloupce, kde jsou listy obsaženy.
8.2 Voda
Voda se vyskytuje téměř všude v krajině, a proto je významně zastoupena i na snímcích DPZ.
Voda má, jak již bylo uvedeno v 1. kapitole, výrazně odlišné elektromagnetické vlastnosti od
jiných materiálů, se kterými se v přírodě setkáváme. Proto má i výrazně odlišnou odrazivost
a spektrální křivky.
Voda se nachází v přírodě ve všech třech stavech – v kapalném, tuhém a plynném skupenství.
Každé z nich má výrazně odlišné spektrální charakteristiky.
8.2.1 Voda v kapalném skupenství
Pro čistou vodu ve viditelném a infračerveném (NIR, MIR) spektru je typická vysoká
pohltivost a nízká odrazivost (její maximum na 0,48 μm).
Relativně vyšší propustnost se registruje u krátkých vln ve viditelné části spektra. Pouze zde
existuje možnost získat informace o dnu nádrže.
Při vlnové délce 0,5 – 0,6 μm je možné získat u čisté vody informace z hloubky až 10-15 m
(„povrchová vrstva“). Při vlnové délce 0,8 –1,1 μm již jen informace z hloubky 10 cm.
Jakékoliv cizorodé částice ve vodě zvyšují její odrazivost.
Na výsledný projev odrazivosti (a rozptylu ve vodě) má vliv i obsah solí, obsah O2
a oxidačně-redukční potenciál.
Obsah planktonu (rostlinných mikroorganismů) se projeví snížením odrazivosti v modré
a zvýšení odrazivosti ve žlutozelené části spektra. Větší obsah chlorofylu ve vegetaci vede
k přizpůsobení spektrálního projevu vody spektrálnímu projevu vegetace.
Mechanické příměsi ve vodě (suspenze, kal, písek ve vznosu) vedou k nárůstu odrazivosti
a pochopitelně i k maskování projevu dna.
Výrazně mění spektrální charakteristiky také další příměsi, např. ropné skvrny.

42
Obrázek 26 Spektrální křivky mořské vody (a), kalné vody (b) a vody s chlorofylem (c) (Kolář et al., 1997)
Obrázek 27 Spektrální odrazivost vody s vysokým obsahem kalu (1) a čisté jezerní vody (2) (Kolář et al., 1997)

43
Obrázek 28 Spektrum hlavních polutantů v řekách Rouge a Detroit a jejich vliv na odrazivost vody v řekách (Meer,
1992)
Vysvětlivky: apparent reflectance – zjevná odrazivost, wavelength – vlnová délka
V termálním infračerveném pásmu by bylo velmi užitečné určování teploty vody, které má
zásadní vliv na meteorologické procesy v atmosféře. Bohužel je ale určování teploty vody
značně problematické díky složitým podmínkám pro přenos tepla mezi vodní hladinou
a atmosférou (vliv větru apod.). V DPZ jsme schopni měřit radiační teplotu horní tenké vrstvy
vody (tloušťka do 1 μm). Pro odvození teploty vody (pod povrchovou vrstvičkou) musíme
znát teplotní profil a k tomu potřebujeme měření z lodí, stálých bójí apod., kalibraci měření.
Kapalná voda v mikrovlnném záření má vysokou odrazivost a chová se jako dokonalý
zrcadlový odražeč, pokud je hladina vody klidná.
Paradoxně při měření radarem se ale místa s klidnou vodní hladinou projevují velmi nízkou
úrovní přijímaného signálu, tedy na obrazu vznikají černá místa. Je to ale výsledek
geometrického uspořádání měření - v případě radaru se používá šikmých měření a při nich se
od zrcadlového povrchu nic neodrazí zpátky do antény.
Jinak je tomu u „drsného povrchu“, tedy při existenci vln, kdy dochází k částečnému odrazu
zpět k anténě. Typicky se dají dobře detekovat vlny o výšce přes 1m. Lépe se detekují vlny ve
směru letu a ne napříč.

44
8.2.2 Sníh a led
Sníh a led má ve viditelné a blízké infračervené části spektra velmi vysokou odrazivost,
mnohem vyšší než ostatní objekty a je až na hranici detekovatelnosti přístroji. Přesto není
mapování pokryvu se sněhem a ledem jednoduché, protože podobně se chovají i horní vrstvy
atmosféry s ledovými krystalky.
Sníh a led ležící na zemském povrchu však vykazují hluboká minima na absorpčních pásech
vody na vlnových délkách 1,6 μm a 2,2 μm. Na nich dochází k poklesu odrazivosti o více než
90%, takový pokles odrazivosti je unikátní v přírodě.
Odrazivost mraků nic takového nevykazuje (ukazuje se konstantní průběh vysoké
odrazivosti). Důvodem je skutečnost, že rozptyl v mraku nezávisí na vlnové délce.
V oblasti tepelného záření (TIR) opět tyto typy objektů nelze rozlišit, protože mají stejnou
povrchovou teplotu.
Stavové parametry u sněhu a ledu zahrnují řadu charakteristik:
Obsah prachových příměsí – způsobuje snížení odrazivosti.
Velikost sněhových částic – s rostoucí velikostí částic klesá odrazivost.
Stáří sněhu – vyšší stáří vede ke snížení odrazivosti. Čerstvý sníh má několikrát vyšší
odrazivost, zvláště ve středním infračerveném pásmu (MIR).
Vodní hodnota – vyšší vodní hodnota sněhu (přímý projev tání nebo zadržení kapalných
srážek) vede ke snížení odrazivosti. Jakékoliv i mírné tání způsobí velké změny, což je
dáno velkými rozdíly ve spektrálních charakteristikách např. rozdíly v odrazivosti. Voda
obalí sněhové granule a výrazně změní výsledné chování spektrální křivky.
Firnovatění či přemrzání sněhu – se projevuje snížením odrazivosti. Tento typ změny je
vhodné detekovat pomocí horizontálně polarizované mikrovlnné záření.
Druh ledu a jeho tloušťka – k jejich rozlišení se opět používá mikrovlnné záření, nejlépe
v pásmu X (λ = 3,2 cm).
8.3 Horniny, zeminy a antropogenní povrchy
Horniny členíme na zpevněné a nezpevněné (zeminy). Nezpevněné horniny rozdělujeme na
nesoudržné (štěrk, písek), soudržné (spraš, jíl apod.), organické (např. rašelina) a umělé (např.
haldy a navážky).
Horniny jsou složeny z minerálů, které určují výsledné spektrální charakteristiky, nicméně
výsledek je ovlivňován i alteracemi (změny chemických a fyzikálních vlastností hornin
a minerálů v důsledku působení endogenních nebo exogenních činitelů), kam řadíme
zvětrávání, ale i ovlivnění např. hydrotermálními roztoky.
Horniny se na povrchu nacházejí nejčastěji jako skalní výchozy nebo zvětraliny jako písek,
sutě apod. Jejich zastoupení může být v některých krajinách dominantní, v našich

45
podmínkách jsou ale horniny většinou překryty půdou. Půda vzniká v procesu pedogeneze
a je komplexem abiotických složek (významná část vzniká rozpadem a rozkladem podložního
horninového substrátu vlivem zvětrávání) a biotických složek (humus, živé organismy apod.).
Podobný spektrální projev jako horniny mají antropogenní povrchy. Příkladem je např.
zastavěné území, střechy, silnice, zpevněné plochy atd. V běžné kulturní krajině je
antropogenní povrch silně zastoupen.
8.3.1 Spektrální projev půdy
Spektrální projev půdy se vyznačuje postupným monotónním zvyšováním odrazivosti
s rostoucí vlnovou délkou ve viditelné a blízké infračervené části spektra až po absorpční
pásma vody.
Hlavní vliv na spektrální charakteristiky půdy mají:
Půdní vlhkost
Minerální složení
Mechanické vlastnosti
Obsah organických látek (humusu)
Přítomnost vegetace
Drsnost (textura) půdního povrchu
Z hlediska vlivu vlhkosti lze konstatovat celkově snížení křivky odrazivosti a zejména
prohloubení propadů v absorpčních pásmech vody (především na 1.4, 1.9 μm).
Přitom platí, že jemnozrnné materiály lépe zadržují vodu, navíc některé jílové minerály přímo
vodu obsahují jako vázanou vodu (např. montmorillonit, 1/2 (Ca,Na)0,25–
0,6(Al,Mg)2Si4O10(OH)2 · nH2O). Proto jsou jílovité půdy obecně vlhčí než písčité půdy.
Dokonce i vysušené jíly obsahují určité množství vody (jde o chemicky vázanou vodu, které
se nelze vysušením zbavit), což se projevuje především na absorpčních pásmech 1.4, 1.9,
2.7 μm.
Významný je i vliv minerálního složení. I laik si všimne zabarvení některých půd.
„Červenice“ jsou u nás typické s vyšším obsahy Fe3+
, a vyskytují se především v místech
výchozu permských hornin. Obdobně „terra rosa“ se vyskytuje např. ve Středomoří na
vápencích, kde vznikají lateritické půdy postupnou dekalcifikací karbonátů a slínů a vytváří se
půdy s vyššími obsahy Al3+
a Fe3+
. Lateritické půdy jsou předstupněm tvorby bauxitů. Obecně
vyšší obsah Fe snižuje odrazivost půd.
Rozpoznatelná může být přítomnost jílových minerálů se skupinou OH- (např. kaolinit
Al2Si2O5(OH)4), protože hydroxylový iont způsobuje minima na 1,4 a 2,2 μm, kde první je
maskován vodou, ale druhý slouží jako indikační příznak.

46
Obsah křemitého písku v půdě lze prokázat, pokud se projeví minimum na 9 μm (typické pro
přítomnost SiO2).
Bez písku
S pískem
Obrázek 29 Spektrální odrazivost a emisivita pro suché půdy - bez písku a s pískem (Meer, 1992)
Na spektrální projev půdy mají vliv i mechanické vlastnosti, zejména velikosti částic. Větší
částice na povrchu zeminy se projeví menší odrazivostí (dochází k vícenásobným odrazům).
Rozdíly v odrazivosti pro 2 čisté jíly bentonit (obsahuje montmorillonit) a kaolín (obsahuje
kaolinit) s rozdílnou velikostí částic jsou dobře dokumentovány v obrázku 30.

47
``
Obrázek 30 Spektrální křivka odrazivosti v závislosti na velikosti částic jílu (vlevo bentonit, vpravo kaolín) (Meer,
1992)
Na spektrálních vlastnostech půdy se projevuje také obsah organických látek (humusu).
Pochopitelně se zvyšováním obsahu humusu dochází nelineárně ke snižování odrazivosti.
Chování půd v tepelném infračerveném spektru se vyznačuje téměř konstantním
vyzařování na cca 0,95. Pouze půdy s obsahem SiO2 (např. křemité písky) vykazují pokles na
9 μm. Vlhká půda má nižší emisivitu (je ochlazována odpařováním). To poskytuje možnost
odlišení vlhkých půd od humusových půd (obě mají sníženou odrazivost ve V či NIR, ale
rozdílnou teplotu, tj. emisivitu v TIR).
V mikrovlnné části spektra se výrazně projevuje vliv vlhkosti, kdy s rostoucí vlhkostí silně
roste rozptylový koeficient a zeslabuje se tloušťka povrchové vrstvy. Kromě vlhkosti se silně
projevuje i přítomnost jakéhokoliv vegetačního pokryvu na půdě. Specifickým rysem pro
mikrovlnné záření je vliv drsnosti povrchu, kdy se mohou na výsledku projevit vlivy
agrotechnické činnosti na půdě, např. existence brázd a jejich orientace.
8.3.2 Spektrální projev minerálů
Minerály nejsou téměř nikdy zkoumány samostatně v DPZ, ovlivňují ale vlastnosti hornin
a půd. Minerály mají homogenní chemické a strukturní složení, proto mají i relativně
jednoznačný spektrální projev. Absorpční pásy v křivkách spektrálního chování ovlivňuje
zejména:
přítomnost chemických prvků a sloučenin
krystalická stavba
přítomnost vody
Výrazné rozdíly mezi spektrálními křivkami jednotlivých minerálů jsou dobře patrné na obr.
31.

48
Obrázek 31 Spektrální charakteristiky vybraných minerálů v rozsahu 2 až 2.4 μm (s vyznačením rozsahu senzoru
TM7) (Dobrovolný, 1998)
Vysvětlivky: chlorite – chlorit, epidote – epidot, talc – mastek, tremolite – tremolit, pyrophylite – pyrofylit, gypsum –
sádrovec, montomorellonite – montmorilonit, illite – ilit, muscovite – muskovit, kaolinite – kaolinit, alanite – alanit,
dolomite – dolomit, galenite - galenit

49
Obrázek 32 Spektra vybraných minerálů a hornin s vyznačenými pásmy senzoru Landsat 7 ETM+ (horizontálně
odsazena pro názornost) (Drury, 1997, in Dobrovolný, 1998)
Vysvětlivky: hematite – hematit, jarosite – jarosit, goethite – goethit, limonite – limonit, basic rocks – bazické horniny
8.3.3 Spektrální projevy hornin
Horniny představují relativně homogenní materiál, přesto mají nepříliš jasné spektrální
projevy a pro jejich rozlišování se více využívá morfologických struktur (geomorfologie).
Spektrální projevy hornin závisí na řadě vlivů:
Minerální složení (tedy i chemické)
Zvětrávání
Alterace (chemické a mechanické změny např. v důsledku působení horkých
roztoků), metamorfóza, apod.
Vliv minerálního složení na spektrální projev horniny je pochopitelně zásadní. Nejčastějšími
horninami jsou křemičité horniny. Ty se podle bazicity (obsah SiO2) dělí na velmi kyselé,
kyselé, neutrální, bazické, ultrabazické. Velmi zjednodušeně posloupnost odpovídá
uspořádání od světlých po tmavé horniny. Z toho přirozeně vyplývá, že odrazivost nepřímo
úměrně závisí na bazicitě (čím vyšší bazicita, tím zpravidla tmavší hornina a tudíž i nižší
odrazivost), je to dobře patrné i na obr. 33. Tento hrubý odhad je možné ale zpřesnit zjištěním
přesné polohy minima u 9 μm (způsobené přítomností SiO2). Jak je z obrázku patrné,

50
s rostoucí bazicitou se poloha minima posouvá směrem k delším vlnovým délkám (od 8.8 μm
pro granity až po 10.7 μm pro dunity).
Vedle křemičitých hornin jsou velmi rozšířené karbonáty. U nich platí, že čím více obsahují
CaO+MgO, tím jsou to světlejší horniny, které automaticky mají vyšší odrazivost. Pokud
obsah CaO+MgO přesáhne 50 %, stoupne odrazivost až na 80 %. Přítomnost uhličitanové
skupiny CO32-
vytváří minimum na 2.3 μm. V tepelné části spektra mají karbonáty výrazné
minimum emisivity na 7 μm (Halounová, Pavelka 2005).
Obrázek 33 Závislost emisivity křemičitých magmatických hornin na vlnové délce Meer, 1992)
Vysvětlivky: acid rocks – kyselé horniny, intermediate rocks – středně bazické horniny, basic rocks – bazické horniny,
utrabazic rocks – ultrabazické horniny, tektite – tektity, granite – granit, trachyte – trachyt, syenite - syenit, andesite
– andezit, quartz basalt – křemenný bazalt, quartz diorite – křemenný diorit, garnet gabro – granátické gabro, basalt
– bazalt, plagioklase basalt – plagioklasový bazalt, peridatite – peridodit, serpentinite – hadec, limburgite – limburgit.

51
U většiny alteračních, zvětrávacích či metamorfních změn platí, že snižují odrazivost
původního (čerstvého a nemetamorfovaného) horninového materiálu (viz obr. 34).
Obrázek 34 Vliv zvětrávání a alterace na odrazivost hornin (Meer, 1992)
V termální infračervené části spektra se horniny rozlišují jednak s využitím specifických
poklesů emisivity, uvedených výše v souvislosti s obsahem SiO2 a karbonátů, jednak lze
využít jejich rozdílné tepelné kapacity. Při poklesu teploty dochází k uvolnění tepla z horniny
úměrné její tepelné kapacitě. Z rozdílu mezi naměřenou zářivou denní a noční teplotou lze
usuzovat na druh horniny.
Na chování hornin v mikrovlnném záření má vliv řada faktorů, zejména:
Chemické složení – lze odvodit dielektrickou konstantu horniny, která závisí na
obsahu kovových a nekovových prvků.
Drsnost povrchu - skalní bloky mají lepší zrcadlový odraz, projevuje se zvětrávání
atd.
Vlhkost – přítomnost vody ovlivní výsledný odražený signál
Je na místě připomenout dobré penetrační schopnosti mikrovlnného záření v aridních
a semiaridních oblastech.

52
8.3.4 Spektrální projevy antropogenních povrchů
Spektrální projevy antropogenních povrchů jsou blízké chování přírodního povrchu bez
vegetace, závisí ovšem na druhu materiálu. Např. u betonu se projevuje typický charakter
postupného nárůstu odrazivosti s vlnovou délkou (obr. 35).
V mikrovlnné části spektra bude opět hrát roli chemické složení (zejména výrazně se projeví
kovové materiály, např. na střechách), drsnost povrchu a vlhkost.
Obrázek 35 Spektrální křivka betonu ranveje letiště (Meer, 1992)

53
Obrázek 36 Spektrální křivky vybraných látek (Meer, 1992)
Vysvětlivky: aluminium – hliník, silver – stříbro, gold – zlato, steel – ocel, white paint – bílá barva
9 Pořizování dat DPZ
Pro DPZ pořizujeme data, která popisují množství zářivé energie odražené nebo emitované od
zemského povrchu a od objektů/jevů v atmosféře. K získání dat se používají 2 principiálně
odlišné technologické postupy:
Registrace změn způsobených chemickou reakcí (záznam pomocí fotografické
kamery, konvenční metody)
Registrace změn elektrických veličin (záznam pomocí radiometru, nekonvenční
metody)
Pro zpracování a interpretaci získaných dat potřebujeme znát přístrojové parametry. Ty
zahrnují:
Čas snímání
Vlnová délka (interval) použitého elektromagnetického záření
Polarizace použitého elektromagnetického záření
Geometrie měření
Parametry přístroje (ohnisková vzdálenost, zorné pole,…)
Z hlediska typů měření se rozlišují měření:
Multispektrální – provádí se ve více částech spektra
Multitemporální – provádí se ve více časových okamžicích
Multipolarizační – měření probíhá ve více kombinacích vysílání a přijímání
polarizovaného mikrovlnného záření (HH, HV, VH, VV)
Hyperspektrální – měření se provádí v desítkách a stovkách částí spektra
Pro multispektrální měření se rozlišují měření:
Paralelní – současně se měří na více vlnových délkách. Záznamové zařízení musí
registrovat data z téže scény na různých vlnových délkách současně.
Sekvenční - postupně se měří ze stejného místa (stacionární měření) tatáž scéna,
vždy při jiné vlnové délce použitého záření.
Z hlediska pohybu při měření se rozeznává měření:

54
Stacionární – v průběhu měření se nemění místo snímání (přesněji nemění se
vzájemná poloha scény a registračního zařízení). Může se měnit scéna
Nestacionární - v průběhu měření se mění místo snímání. Ke snímání typicky
dochází na pohybujícím se nosiči.
U nestacionárních měření se provádí zpravidla měření v ploše (využívají se zobrazující
radiometry alias skenery, které registrují záření z míst podél osy letu i napříč, výsledkem je
obraz scény) nebo měření na linii (trasovací měření, např. výšky letu).
Měření v ploše využívá jak analogového (konvenčního) záznamu (kamery) tak i digitálního
(nekonvenčního) záznamu (skenery) (obr. 37). Vzniká obrazový záznam (nebo neobrazový,
který je na něj následně převeden).
Obrázek 37 Princip pořizování obrazového záznamu pomocí zobrazovacích zařízení na nosiči (zleva doprava:
analogový záznam z letecké kamery, digitální záznam z mechanického skeneru, digitální záznam z elektronického
řádkového skeneru) (Clevers, 1999)
Vysvětlivky: aerial image plane – rovina leteckého snímku, shutter – uzávěrka, imaging optics – zobrazovací optika,
scanning mirror – skenovací zrcadlo, point detector – bodový detektor, line array detector – řádkový detektor
Příkladem zařízení měřícího na linii je laserový a radiolokační výškoměr. Jedná se
o výškoměr aktivní, tedy zařízení, které vysílá vlastní signál (laserový či rádiový) a svou
výšku nad povrchem zjišťuje z doby potřebné k jeho odrazu a návratu (princip radaru).
Laserový výškoměr se sestává z laserového generátoru a výkonných optických soustav
(dalekohledů), které zachycují signál odražený od povrchu. Podle množství zachyceného
světla se kromě vertikální vzdálenosti k povrchu dá určit také albedo a drsnost povrchu. Celá
aparatura generuje velké množství optických pulsů, takže měření podél linie (orbitální dráhy)
jsou velmi přesná a mají malé rozestupy. Nevýhodou je naopak poměrně velká vzdálenost

55
mezi jednotlivými stopami (např. u měření měsíční topografie sondou Clementine), kde se
musí mezi těmito měřeními provádět interpolace.
9.1 Analogový záznam při fotografování
Základem konvenčního záznamu obrazu je pořízení fotografie sledované scény. Při ní se
optickým zařízením analogové kamery vytvoří latentní obraz na filmovém materiálu, který je
následně zafixován. Z hlediska geometrie je obraz zachycen centrální projekcí. Zpravidla se
letecké snímky následně skenují (digitalizují).
K výhodám letecké fotografie patří (Dobrovolný, 1998):
Úplný a bezchybný (z hlediska obsahu) pohled shora, nepodléhající generalizaci,
ukazuje detaily i celky vyšších řádů.
Podává informaci o okamžitém stavu různě intenzivních dynamických procesů.
Jde o trvalý záznam, který lze opakovaně porovnávat s jinými zdroji informací.
Oproti lidskému zraku se vyznačuje rozšířenou spektrální citlivostí (přibližně od
0.3 do 0.9 mikrometrů). Může tedy postihnout i jevy či vlastnosti nepostižitelné
pouhým okem.
Vysoká prostorová rozlišovací schopnost a geometrická kvalita snímků. Na
snímcích lze nalézt větší detail než pouhým okem. Po zpracování lze velmi přesně
měřit vzdálenosti, plochy či úhly.
Podle osy záběru při fotografování rozlišujeme snímky svislé, šikmé a vodorovné (obr. 38).
Při odchylce do 3o lze považovat snímek za kolmý (Dobrovolný, 1998).
Obrázek 38 Kolmý snímek (a), šikmý bez horizontu (b), šikmý s horizontem (c), vodorovný snímek (d) (Dobrovolný,
2005)

56
Geometrické vlastnosti letecké fotografie jsou určovány především centrální projekcí snímku
(obr. 39).
Obrázek 39 Rozdíly mezi ortogonální a centrální projekcí (Dobrovolný, 2005)
Vysvětlivky: top view – horní pohled, side view – boční pohled, principal point - hlavní bod
S tím souvisí i 2 hlavní faktory:
Kolísání měřítka – v důsledku rozdílné výšky terénu (a tedy i relativní výšky
kamery nad daným místem) na snímku nebo mezi snímky dochází ke kolísání
měřítka (obr. 40)
Radiální posuny – v důsledku centrální projekce se bod s odlišnou výškou
promítne do srovnávací hladiny před (v případě že leží pod srovnávací hladinou),
nebo za (bod leží nad hladinou) průmět získaný při ortogonální projekci (obr. 41).
Pro transformaci do ortogonální (mapové) projekce je nezbytné tento rozdíl
(radiální posun) kompenzovat.
hH
f
H
f
AO
aoS
'
avg
avghH
fS

57
Obrázek 40 Kolísání měřítka (Dobrovolný, 2005)
Vysvětlivky: negative film – negativní film, exposure station – expoziční stanice, optical axis - optická osa, height
above terrain – výška nad terénem, aircraft flying height – letivá výška, datum (sea level) – datum (hladina moře)
Obrázek 41 Radiální posuny (Smith 1943, in Kumpera et al., 1986)

58
9.1.1 Filmový materiál
Filmový materiál obsahuje jako hlavní složku halogenidy stříbra. Při osvětlení dojde
k rozkladu halogenidů na stříbro a halony a vzniká latentní obraz. Následně se film
zpracovává ve vývojce a ustalovači. Citlivá vrstva negativu zčerná úměrně dopadlému záření.
Vytvořené světlé a tmavé plochy skládají výsledný obraz.
Z hlediska formy filmového materiálu rozlišujeme negativ (zpravidla průhledný), pozitiv
a diapozitiv (průsvitný materiál). Materiály rozdělujeme na černobílé a barevné. Sledujeme
především jejich citlivost na sledovanou část spektra (podle toho rozlišujeme materiály
panchromatické, infračervené atd.)
Vlastnosti filmového materiálu se udávají pomocí následujících veličin.
Densita (optická hustota) D vyjadřuje stupeň zčernání filmového materiálu.
log1
log D
kde τ je propustnost.
Expozici H udává součin intenzity ozařování a času, po které ozařování působí.
tEH
Kontrast K odpovídá podílu maximální a minimální propustnosti, měřené podél přímkového
profilu na snímku. Kvantifikuje rozdíly propustnosti na snímku, tedy poměr mezi světlými a
tmavými částmi snímku.
min
max
K
Závislost density na expozici udává senzitometrická křivka (obr. 42). Z jejího průběhu je
zřejmé, že při nízké hodnotě expozice se míra zčernání filmového materiálu nenarůstá
a zůstává na základní úrovni, odpovídající šumu. Po dosažení minimální limitní expozice
začíná materiál černat a na rostoucí expozici reaguje pravidelným nárůstem černání.
V semilogaritmickém měřítku mívá závislost přímkový průběh, což je pro měření ideální.
Směrnice této přímky se označuje jako gradace (strmost) G. Odpovídá rychlosti černání při
konstantním osvětlení.
Normální materiály mají G cca 1, tvrdé materiály G větší než 1. Gradace závisí na
podmínkách a kvalitě vyvolání, proto se udává u filmu G v intervalu hodnot (expoziční
pružnost).
Po rozkladu všech dostupných halogenidů dochází k ukončení černání, protože ani vyšší
expozice již nemá být jak registrována. Maximální míra zčernání už zůstává konstantní,
vyčerpala se kapacita materiálu.

59
Obrázek 42 Senzitometrická křivka tvrdého fotografického materiálu (Kolář et al., 1997)
Další významnou vlastností filmového materiálu je jeho citlivost, tedy minimální velikost
expozice potřebná k vytvoření obrazu. Citlivost fotografických materiálů se udává v ASA
nebo ISO (ISO 5800), případně ve starší německé normě DIN. Dvojnásobná citlivost filmu
dle ASA (resp. 1 expoziční stupeň dle ISO) snižuje expoziční čas fotografie na polovinu.
Tabulka 8 Citlivosti filmů podle stupnic DIN, ASA a ISO (Dobrovolný, 1998)
DIN 1 5 10 12 15 18 21 24 27 30
ASA 1 2,5 8 12 25 50 100 200 400 800
ISO 1 2 3 4 5 6 7 8
Platí závislost, že čím citlivější je materiál, tím větší má zrna. Větší krystalky halogenidů jsou
schopny zachytit a akumulovat i menší množství zářivé energie. Proto s citlivostí filmu
souvisí také jeho prostorová rozlišovací schopnost. Se zvětšováním zrn se zmenšuje
rozlišení.
Prostorová rozlišovací schopnost znamená schopnost rozlišit na snímku 2 sousední objekty. Je
posuzována podle velikosti nejmenšího rozeznatelného objektu na snímku.
V případě fotografie se prostorová rozlišovací schopnost měří počtem rozpoznatelných čar na
jednotku délky (1 mm). Z vyfotografovaného vzorníku se vybere ten vzor, u kterého se ještě
čáry neslévají (jsou samostatně odlišitelné).

60
Obrázek 43 čárové vzory pro určování prostorové rozlišovací schopnosti na fotografiích (Dobrovolný, 2005)
V praxi se používají fotografické materiály černobílé negativní, barevné pozitivní a barevné
diapozitivové.
Fotografické materiály černobílé se skládají z následujících vrstev (Dobrovolný, 1998):
Ochranná vrstva – chrání proti mechanickému či jinému poškození
citlivá vrstva – obsahuje krystalky halogenidů stříbra v želatině
Mezivrstva – spojuje citlivou vrstvu s podložkou
Filmová podložka – podklad, který zajišťuje pevnost fotografického materiálu,
odolná vůči teplotním či vlhkostním změnám.
Antihalační vrstva – zabraňuje zpětnému odrazu procházejícího záření, které by
z druhé strany mohlo exponovat citlivou vrstvu (vzniká jev „halo“ kolem světlých
objektů).
Citlivá vrstva filmu může být citlivá vůči celému viditelnému spektru (vyjma modré) –
mluvíme o panchromatické vrstvě. V případě ortochromatické se snímá viditelná část
spektra s potlačením oranžové a červené. Infrachromatická vrstva je citlivá k intervalu 0.6-
0.9 μm (červená a začátek blízkého infračerveného záření).
Konvenční letecké snímkování se zpravidla provádí s využitím panchromatických snímků,
které mají nejlepší prostorovou rozlišovací schopnost (akumulují energii z širší části spektra,
navíc relativně energeticky bohatého, proto mohou mít menší zrna). Poměrně obtížně se na
nich rozlišuje vegetace.
Infračervené snímky se používají zejména pro mapování vegetace a jejích stavových změn.
Jsou výrazně kontrastní a lze je pořizovat i za horšího počasí (Dobrovolný 1998).
Fotografické materiály barevné obsahují 2-3 citlivé vrstvy, každá k jedné ze základních
barev (Dobrovolný, 1998). Typicky obsahují pod ochrannou vrstvou vrstvu citlivou
k modrému světlu, pak následuje žlutá filtrační mezivrstva (jejím úkolem je pohltit všechno

61
modré, energeticky silné záření), dále vrstva citlivá k zelené a pod ní vrstva citlivá k červené.
Barevné snímky se dobře interpretují, protože lidské oko rozezná mnohem více barevných
tónů než odstínů šedé. Dobře se rozlišuje vegetace, reliéf pod vodou, kresba ve stínech.
Nevýhodou je horší prostorové rozlišení, protože na jednotlivých citlivých vrstvách dochází
k rozptylu světla (Dobrovolný, 1998).
Fotografické materiály infračervené mají podobnou skladbu, jen s příslušným posunem.
Pod ochrannou vrstvou je vrstva citlivá k infračervené části spektra, následuje filtrační
mezivrstva, pak vrstva citlivá k zelené a nejníže vrstva citlivá k červené. Používají se zejména
pro mapování vegetace, ale i pro geologické a pedologické účely či tepelné mapování
(Dobrovolný, 1998).
Optické vlastnosti fotografie lze popsat pomocí následujících jevů (podle Dobrovolného):
Kontrast – definován viz výše
Ostrost – schopnost zachytit změnu kontrastu. Jako hloubka ostrosti se označuje
schopnost objektivu snímat ostře objekty, které nejsou ve stejné vzdálenosti.
Oblačné jasné skvrny – na snímku se objeví přezáření terénu v důsledku
intenzivního odrazu slunečního záření od okrajů oblaků
Sluneční skvrna – vzniká přímým odrazem slunečního kotouče do objektivu, např.
odrazem od vodní hladiny.
Vignetace – jev úbytku světla od středu fotografie k jejím okrajům. K její
eliminaci se používají speciální filtry, které kompenzují úbytek světla absorpcí na
filtru.
9.1.2 Kamery
Řadové kamery patří k základním typům. Jejich konstrukce je znázorněna na obr. 44. Vedle
řadových kamer se méně často využívaly i kamery štěrbinové či panoramatické.
V poslední době se však přechází na digitální kamery.

62
Obrázek 44 Základní součásti řadové kamery jednoobjektivové (Dobrovolný, 2005)
Vysvětlivky: focal place – ohnisková rovina, lens – čočka, focal length – ohnisková délka, optical axis – optická osa,
shutter – uzávěrka, filter – flitr, diaphragm – zábrana, magazine – kazeta s filmem, body – tělo kamery, lens cone
assembly – optický systém čoček
9.2 Radiometr
Radiometr je zařízení, které energii dopadajícího elektromagnetického záření převádí na
měření elektrické veličiny. Skládá se principiálně z optického systému, detektoru
a předzesilovače (obr. 45). Úkolem optického systému je vybrat, koncentrovat a nasměrovat
záření na detektor. Skládá se z čoček a zrcadel a také spektrálního děliče, který se postará
o vymezení správných vlnových délek pro registraci záření. Detektor provede transformaci
světelné energie na změnu elektrické veličiny. Předzesilovač tuto změnu zesílí, aby ji bylo
možné přenášet a zaznamenávat.
Obrázek 45 Schéma konstrukce radiometru (Kolář et al., 1997)
Parametry radiometru zahrnují následující veličiny:
Odezva R je poměr změny elektrické veličiny ke změně dopadajícího toku záření.

63
V
R
Vnitřní šum přístroje je tok záření produkovaný prvky radiometru ΦN. I když na radiometr
nedopadá žádné záření, přesto vzniká uvnitř přístroje šum, který se projeví jistou úrovní
sledované elektrické veličiny.
Citlivost – převrácená hodnota vnitřního šumu
N
D
1
Při rostoucí toku záření narůstá i generovaná elektrická odezva, avšak jen po jistý limit, který
odpovídá maximální hodnotě registrovaného záření Φmax a maximální hodnotě sledované
elektrické veličiny Vmax. Časový průběh odezvy někdy není stabilní, což se řeší přerušováním
příchodu záření.
Zorné pole radiometru je určeno velikostí prostorového úhlu, ze kterého přichází zářivý tok
do radiometru.
f
rtg d2
Obrázek 46 Zorné pole radiometru (Halounová, Pavelka, 2005)

64
Prostorové rozlišení radiometru je vymezeno kruhovou plochu o poloměru r, které určuje
zorné pole radiometru na zemském povrchu (obr. 47)
2
222 tghrP
Obrázek 47 Odvození prostorového rozlišení radiometru (NRC, nedatováno)
9.2.1 Spektrální měření
K vymezení části spektra, které se registruje radiometrem, se používají spektrální děliče.
K základním typům patří:
Hranoly
Mřížky
Optické filtry
U optického hranolu závisí jeho schopnost rozdělení vlnových délek záření na velikosti
vrcholového úhlu hranolu a na indexu lomu, ze kterého je hranol vyroben. Ve výsledku se ale
dosahuje jen malé spektrální rozlišovací schopnosti.
Obrázek 48 Rozkládání bílého světla hranolem (http://www.cyberphysics.co.uk/topics/light/prisms.htm)

65
Disperzní mřížka rozkládá záření lomem nebo odrazem. Disperzní mřížka je skleněná
destička, do které je vyryta řada jemných rovnoběžných vrypů. Vrypy tvoří neprůhledná místa
a záření prochází mezi nimi. Při průchodu záření štěrbinami dochází k jeho interferenci
a vhodným nastavením lze dosáhnout maximální zesílení záření vlnové délky, která má
mřížkou projít. Spektrální rozlišení (výběr vlnové délky) závisí na hustotě vrypů a úhlu
dopadu.
Optické filtry se rozdělují na absorpční a interferenční. Absorpční filtry využívají pohlcování
záření při průchodu vhodným materiálem. Pro konstrukci se používají přírodní materiály (na
bázi Si, Ge) nebo obarvená skla či umělé hmoty. Interferenční filtry využívají k filtraci
vhodných vlnových délek intereference. Několik vrstev dielektrika je naneseno na podložce
a na rozhraní vrstev dojde při průchodu záření k intereferenci, při které je propuštěno jen
záření určitých vlnových délek. Je výhodné, že u tohoto filtru záleží filtrovaná vlnová délka
jen na tloušťce filtru. Z konstrukčního hlediska se nejvíce osvědčuje kruhový filtr
s proměnnou tloušťkou. Stačí točit s kruhovým filtrem a mění se tloušťka filtru, a tudíž se
mění také interval propuštěných vlnových délek.
Obrázek 49 Kruhový filtr (Kolář et al., 1997)
9.2.2 Detektory
Detektor reaguje na dopadající záření změnu elektrické veličiny, kterou lze následně
registrovat. Podle způsobu reakce rozlišujeme:
Tepelné – dopadající záření zahřívá detektor, což lze využít v různých jevech
a tomu odpovídajícímu zařízení:
o Bolometry – se změnou teploty se mění vnitřní odpor.
o Termistor – se změnou teploty dochází ke vzniku termoelektrické síly na
spoji 2 různých látek, zpravidla oxidů kovů jako Mn, Co, Ni.

66
o Pyroelektrické detektory - díky změně teploty vytvářejí povrchový náboj
a mění vnitřní odpor. Používají se krystaly tantalanu lithného nebo niobanu
Sr-Ba.
Fotonové - dopadající fotony záření přímo působí na uvolnění elektronů
polovodičového materiálu a zvýšení vodivosti materiálu. Detektor reaguje pouze,
pokud je energie fotonu větší než excitační energie valenčního elektronu. Proto
u fotonových detektorů existuje bod zvratu, za kterým je reakce detektoru nulová
(fotony delších vlnových délek již nemají dostatečnou energii, aby stačila na
uvolnění elektronu z příslušných vazeb).
chQ
Vlnová délka záření tedy musí být menší než mezní hodnota
ex
Přitom reakce detektoru postupně narůstá až k této limitní vlnové délce, pak naráz klesne na
nulu.
Pro čistý Si je bod zvratu 1,1 μm; pro Ge 1,8 μm. Pro sirníky, selenidy a teluridy jsou body
zvratu ve vyšších vlnových délkách – PbS má 2,9 μm; InAs 3,2 μm; PbSe, InSb 5,4 μm.
Materiály jako HgCdTe nebo PbSnTe dosahují bodu zvratu až 8-12 μm.
Vedle čistých směsných materiálů lze použít také nečisté materiály, jako je Ge s příměsí Hg;
nebo Si s příměsí Cu, B, Al, P, As, Sb, u kterých lze dosáhnout bodu zvratu až 16-30 μm.
Charakteristiky detektorů:
Spektrální citlivost – určuje, nakolik je detektor citlivý na změny vlnové délky
záření. Tepelné detektory jsou neselektivní, zatímco fotonové jsou výrazně
selektivní.
Časová konstanta - udává rychlost reakce detektoru. Udává dobu od začátku
ozařování až do dosažení 1/e, tj. 63% konečné hodnoty výstupního signálu.
Tepelné detektory jsou pomalé a setrvačné (mají velkou časovou konstantu)
v důsledku relativně pomalého zahřívání. Fotonové jsou naopak rychlé a jejich
časová konstanta bývá v řádu μs či ns. Časová konstanta ovlivňuje možnou
rychlost snímání – kratší časová konstanta dovoluje mnohem rychlejší měření
a tedy i pohyb nosiče.
Časová nezávislost odezvy – popisuje stabilitu výstupního signálu. Stává se, že
i při konstantní úrovni záření, začne výstupní signál detektoru slábnout. Pokud
signál není stabilní, je potřeba do soustavy zařadit přerušovač. Bude docházet
k pravidelnému přerušování záření a signál detektoru se ustálí na určité hodnotě.

67
Detekční schopnost – charakterizuje minimální měřitelnou hodnotu záření. Je to
hodnota, která je odlišitelná od šumu přístroje, tj. detekční schopnost de facto
udává úroveň vnitřního šumu přístroje.
Provozní teplota – u detektorů je nutné také uvádět provozní teplotu. Pro střední
a infračervené záření se detektory musí chladit. Pro MIR se používá 195 K, pro
TIR 77 K (tekutý N2) nebo až 4 K (tekuté He).
9.2.3 Kalibrace
Odezva byla výše definována jako poměr mezi změnu výstupního signálu a změnou
dopadajícího zářivého toku. Odpovídá směrnici regresní přímky. Závislost mezi velikostí
výstupního signálu a velikostí zářivého toku ale nemusí být lineární a v důsledku toho není
odezva v celém rozsahu konstantní. Zařízení je nutné kalibrovat, aby bylo možné vždy
správně odvodit odezvu a tedy i správně určit hodnotu měřeného zářivého toku.
Kalibrační závislost může být popsána funkcí, vyjádřena graficky. Rovněž můře být popsána
pouze tabulkou, ve které jsou uvedeny páry hodnot zářivého toku a odpovídajícího výstupního
signálu.
Během měření záření je nutné provádět kalibraci.
U TIR jde o skutečnou kalibraci. Používají se 2 černá tělesa s teplotou blízkou minimální
a maximální hodnotě předpokládaného rozsahu měření. Požadovaná teplota se dosahuje jejich
vyhříváním nebo chlazením. Povrch těles musí být upraven, aby měl emisivitu blízkou 1.
Běžné je ale srovnávání se standardem. V procesu měření se pravidelně do zorného pole
umísťuje standard a zjišťuje se hodnota výstupního signálu, na základě které se pak upravují
naměřené hodnoty. Většinou se používá vnitřní kalibrace, kdy je zdroj standardního záření
uvnitř přístroje. Na družici je ale možné využít vnější kalibrace, např. zaměřením na
slunečním záření, jehož zářivost je v kosmickém prostoru dobře odvoditelná.
9.3 Zobrazující přístroje
Pro získání obrazu sledovaného území je potřebné zajistit měření v ploše, nikoliv jen na linii.
Radiometr tedy musí být schopen pokrýt měřením plochu území při letu nosiče. K tomu se
používají zobrazující radiometry, označované jako skenery. Provádějí postupné skenování
území podél trasy letu – buď napříč trasy letu, nebo podélné skenování ve směru osy letu.
Postupně nebo najednou se provádí měření záření přicházejícího z jednotlivých částí území.
Nejmenší jednotce měřeného území odpovídá ve výsledném obraze 1 pixel a její rozměr na
zemském povrchu udává prostorová rozlišovací schopnost přístroje.
Skenery rozdělujeme na mechanické (mechanooptické) a elektronické (elektronoptické).
Mechanický skener provádí měření z 1 elementární plochy území (1 pixelu) po druhé
a přesuny mezi nimi zajišťuje mechanické zařízení (plus pohybu nosiče). Elektronický skener
měří naráz sadu elementárních plošek území a vytváří naráz řádku nebo část plochy obrazu
(matici pixelů), což je umožněno používáním paralelního snímání sadou detektorů.

68
9.3.1 Mechanický skener
Skenovací jednotka zajišťuje směřování záření na optický systém skeneru. Tvoří ji zrcadlo,
odrážející záření od zemského povrchu, a mechanické zařízení na vychylování zrcadla.
Skenovací jednotka může být umístěna:
před objektivem – pak se jedná o předmětový skener
za objektivem – pak se jedná o obrazový skener
Obrazový skener musí mít velký průměr objektivu a velké zorné pole, což představuje
konstrukční problém (např. u velkého průměru objektivu se více projevují chyby). Proto se
více se používá předmětový skener. Vytváří obraz v optické ose objektivu, je nutná jen
korekce sférické vady a chromatické aberace objektivu.
Obrázek 50 Činnost mechanického skeneru se snímáním napříč osy letu (skener MSS) (Kolář et al., 1997)
Vysvětlivky: energy from ground feature – energie od povrchového geoprvku, dichroic grating – dvoubarevná
(disperzní) mřížka, prism – hranol, tape recorder –záznamník
Podle tvaru skenované řádky se rozlišuje kónický a lineární skener (Halounová, Pavelka
2005). Kónický skener měří pod stejným úhlem podél kruhové řádky (povrch kužele) a úhel
pozorování je stále stejný. Je těžko zvládnutelný pro větší rozměry, používá se spíše jen
v obrazovém skeneru.
Lineární skener provádí měření v řádcích kolmo na směr letu. Využívá rotující nebo kmitající
zrcátko (nebo 2 zrcadla symetricky kolem osy otáčení) ve 2 variantách uspořádání.

69
Obrázek 51 Dvě varianty uspořádání lineárního skeneru (Kolář et al., 1997)
9.3.1.1 Geometrie měření mechanických skenerem
Následující vztahy platí za předpokladu, že měřený povrch je ideálně rovný a pohyb nosiče
skeneru je rovnoběžný s povrchem. Pozorovací úhel je ±θ odklon od normály.
Potom celkové zorné pole (Angular Field Of View) FOV= 2* θ.
Délka 1 řádky odpovídá šířce záběru L.
tghL *2
Snímací kapacita skeneru M udává plochu nasnímanou za jednotku času.
vLM
Velikost pixelu na povrchu určuje okamžité zorné pole radiometru IFOV (Instantaneous Field
Of View), které je vymezeno úhlem ve směru podél řádky βx a úhlem ve směru letu βy.
9.3.1.1.1 Geometrické chyby při snímání obrazu
Chyby je nutné rozdělit na systematické a nahodilé. Systematické chyby mají dobře
formulovatelnou příčinu, kterou lze díky tomu opravit příslušným matematickým vztahem.
V důsledku centrální projekce při konstantní IFOV dochází ke změně velikosti pixelu na
povrchu.
Jde o tangenciální zkreslení. Velikost pixelu kolmo na směru letu Δx je nejmenší v ose letu
a k okrajům skenované řádky roste podle níže uvedeného vztahu. Ze stejného důvodu (ale
v jiném poměru) se mění i velikost pixelu podél směru letu Δy, která je rovněž nejmenší v ose
letu.

70
Obrázek 52 Odvození vzniku tangenciální chyby (Kolář et al., 1997)
Vzdálenost x od osy letu se vypočte jako x = h * tg θ.
Derivace x podle θ poskytne výraz:
2cos
h
d
dx
dx nahradíme za Δx a Δθ za βx
dxx
x
x
hx
2cos

71
Obrázek 53 Změna Δx v závislosti na odklonu od svislice (Dobrovolný, 2005)
Změnu velikosti příčného rozměru pixelu Δy odvodíme z obr. 54, kdy příčný rozměr získáme
náhradou koncovým obloukem (platí pro malé úhly), tedy délka přepony (h/cosθ) krát úhel β.
Rozměr pixelu v ose y je tedy menší proti rozměru ve směru x.
y
hy
cos
cos xy
Obrázek 54 Vztah mezi příčným a podélným zkreslením pixelu v důsledku tangenciálního zkreslení (Dobrovolný,
2005)
Důsledkem tangenciálního zkreslení je, že velké skenovací úhly vedou k protažení pixelů
podél řádky.

72
Obrázek 55 Vztah mezi příčným a podélným zkreslením pixelu v důsledku tangenciálního zkreslení (Clevers, 1999).
Další chyba vzniká z rozdílu mezi zobrazením pořízených dat na rovinnou plochu a registrací
v ohniskové vzdálenosti na kulovou plochu. Je významná pro velké úhly (pro úhly >45 st.).
Obrázek 56 Vznik chyby z dat sejmutých na kulové ploše a promítaných na rovinnou plochu (Kolář et al., 1997)
Chyba ze zakřivení Země se projevuje pouze při snímání velkých scén. Takové snímají
družice s geostacionární dráhou nebo s velkým záběrem. V případě geostacionární družice

73
METEOSAT se chyba ze zakřivení Země projeví tak, že pixel na rovníku velikost 2,5 km,
zatímco v Evropě 7x9 km.
U všech typů zkreslení je nutno okraje obrazu zvětšit a roztáhnout změřené pixely, aby se
chyby kompenzovaly.
Chyby z nerovnosti terénu Δx se dají snadno odvodit z výšky a odklonu od svislice.
tghx
Δ h je změna výšky letu kvůli nerovnostem terénu
Δ x je poziční chyba
Specifická chyba u mechanického skeneru je chyba z pohybu nosiče během skenování
1 řádky. V průběhu skenování se nosič posune o jistou dráhu a tento posun Δy je potřebné
kompenzovat. Potřebujeme:
Tr … čas potřebný ke skenování 1 řádky
L … délka řádky
x … poloha na řádku (od počátku)
v … rychlost letu
Čas na skenování 1 pixelu je:
L
Tr
Zpoždění na konci skenování x-tého pixelu je pak:
L
Tx r
Posun v ose y pro x-tý pixel
L
Tvxy r
Další chyba rovněž souvisí s trváním skenování 1 řádky. Chyba z otáčení Země je způsobena
pootočením povrchu Země při posunu nosiče na snímání další řádky. Rotace probíhá od
západu na východ, při pohybu družice od S pólu je každá další řádka posunutá. Pro opravu
obdélníkového obrazu je nutné posunout jednotlivé řádky k západu (čím více na J, tím větší
posun). Z obdélníku se stane lichoběžník zkosený doprava.

74
Nahodilá geometrická zkreslení jsou způsobena především nestabilitou pohybu nosiče a jeho
náklonem ve 3 osách.
Podmínky návaznosti při skenování
Podmínka návaznosti při skenování na řádku je, že frekvence čtení na detektoru musí
odpovídat velikosti OZP. Lze to vyjádřit následujícím vztahem
02
xr
p
Tt
xr
nT
f
02
Pokud je frekvence příliš velká, dochází k překryvu hodnot pixelů. Pokud je naopak frekvence
příliš malá, vznikají nepokryté mezery mezi hodnotami pixelů.
Podmínky návaznosti řádků při skenování vychází z požadavku, že skenovací cyklus musí být
přesně tak dlouhý, aby odpovídal přesunu skeneru nad další řádku. Celková doba skenování
Ts (která je součtem doby potřebné pro naskenování 1 řádky, doby kalibrace a ostatní
pomocné doby) musí odpovídat vzdálenosti 2 sousedních řádek, resp. jejich poměr musí
odpovídat rychlosti letu nosiče v.
Ts = Tr+Tkal+Tost
Tr doba pořízení 1 řádky
Tkal doba kalibrace
Tost doba ostatní (zpětný chod zrcátka apod.)
sT
yv
9.3.2 Elektronický skener
V elektronickém skeneru není 1 či několik málo detektorů, ale celé řádkové nebo maticové
pole detektorů v ohniskové rovině objektivu. Každé čidlo průběžně registruje záření z plochy
1 pixelu, která plošně navazuje na území snímané sousedním čidlem. Nejběžnější konstrukce
elektronického skeneru snímá naráz řádku orientovanou kolmo na směr letu, označujeme ho
jako stírací skener (along-track scanner, podélné snímání).

75
Obrázek 57 Stírací skener (podélné skenování) (Dobrovolný, 1998)
Velikost pixelu Δx se pak spočítá z rozměru detektoru d.
f
dhx
Šířka záběru je dána součinem počtu detektorů n a rozměrem 1 pixelu.
xnL
Podmínka návaznosti pixelů na řádku automaticky splněna. Podmínka návaznosti řádků
zůstává stejně definovaná jako u mechanooptického skeneru.
Základem elektronických skenerů jsou CCD (Charge Couple Device) detektory. U nich jsou
signály z čidel přenášeny paralelně do paměťového registru. Registry jsou propojeny
a vytvářejí sériové transportní řady. Během předzesílení signálu dochází k nové expozici čidel
a cyklus se opakuje. Rozměry CCD detektorů jsou v jednotkách μm. CCD jsou ve skeneru
maticově uspořádány.
K jejich výhodám patří:
větší citlivost
vyšší radiometrické rozlišení
větší spolehlivost - chybí mechanická část
k nevýhodám zejména:
potřeba kalibrace senzorů – každý CCD se musí kalibrovat zvlášť, protože je
nezávislý i procesu stárnutí a opotřebovávání.

76
Vytvářený signál se zaznamenává buď v analogové, nebo v digitální podobě. Ukládá se
v záznamovém zařízení, ze kterého může být vysílán na Zemi.
9.4 Nosiče
Pro snímání povrchu Země ať již kamerami či skenery (nebo jinými zařízeními) je nutné je
nést na pohyblivém nosiči. Mezi nejběžnější nosiče patří:
Letadla
Umělé družice
Raketoplány (dříve)
Helikoptéry
Modely (zejména drony, UAV)
balóny
Letadla
Vlastnosti letadla potřebné pro DPZ přehledně uvádí Řeřicha (1998). Patří k nim především
stabilita letu, velký rozsah letových rychlostí (nízká pro provádění záznamu, vysoká pro
rychlé přiblížení ke snímané oblasti), přetlaková pilotní kabina pro lety ve výšce na 3 km,
vhodná úprava pro nesení příslušných přístrojů a provádění záznamu (např. planparalelní
skleněná deska v trupu letadla).
Nezbytnou podmínkou měření je dobrá příprava letu, jeho plánování (např. složení všech
požadavků z dané oblasti), připravují se náletové osy, zajišťující dostatečné překryvy snímků
atd.
Obrázek 58 Dráha letounu při fotografování snímků v řadě (1) Podélný překryt v řadě, (2) příčný překryt mezi
řadami (Kumpera et al., 1986, podle Millera, Millera 1961)

77
Často se provádí předletová signalizace vybraných objektů na zemi (např. bílé značky
malované na poklopech či asfaltu nebo připevňované v horizontální poloze na rozích plotů).
Letadlo nese potřebné letecké kamery a skenery, kromě toho ale i řadu dalších podpůrných
přístrojů – navigační přístroje, navigační teleskop, řídící přístroje pro jednotlivá záznamová
zařízení atd.
K hlavním výhodám letadla jako nosiče pro DPZ patří:
Dostatek prostoru, možnost výměny zařízení, lidská kontrola a obsluha
Operativní nasazení, úprava výšky letu
Nízká výška letu a proto výborné prostorové rozlišení
K nevýhodám patří:
Pohyb letadla není ideální, což je zdrojem chyb a zkreslení. Dochází k rotačním
pohybům kolem 3 os, projevuje se snos větrem, změna výšky. GPS je nutná.
Široký záběr leteckého skeneru a proto velké zkreslení
Snímají se malé plochy
Delší doba snímání a z toho vyplývají i nestejné (světelné) podmínky
Omezení výšky letu
Výška terénu musí být jen do 10% výšky letu
Družice
K výhodám družic patří:
Velká výška letu (podle typu dráhy stovky až tisíce km)
Malý úhel záběru
Větší plocha snímání, krátká doba snímání
Pravidelné opakování (definované časové rozlišení)
Možnost dodávky dat v reálném čase
Stabilní dráha, minimální odchylky
Možnost dráhy se stabilními světelnými podmínkami během roku (slunečně
synchronní)
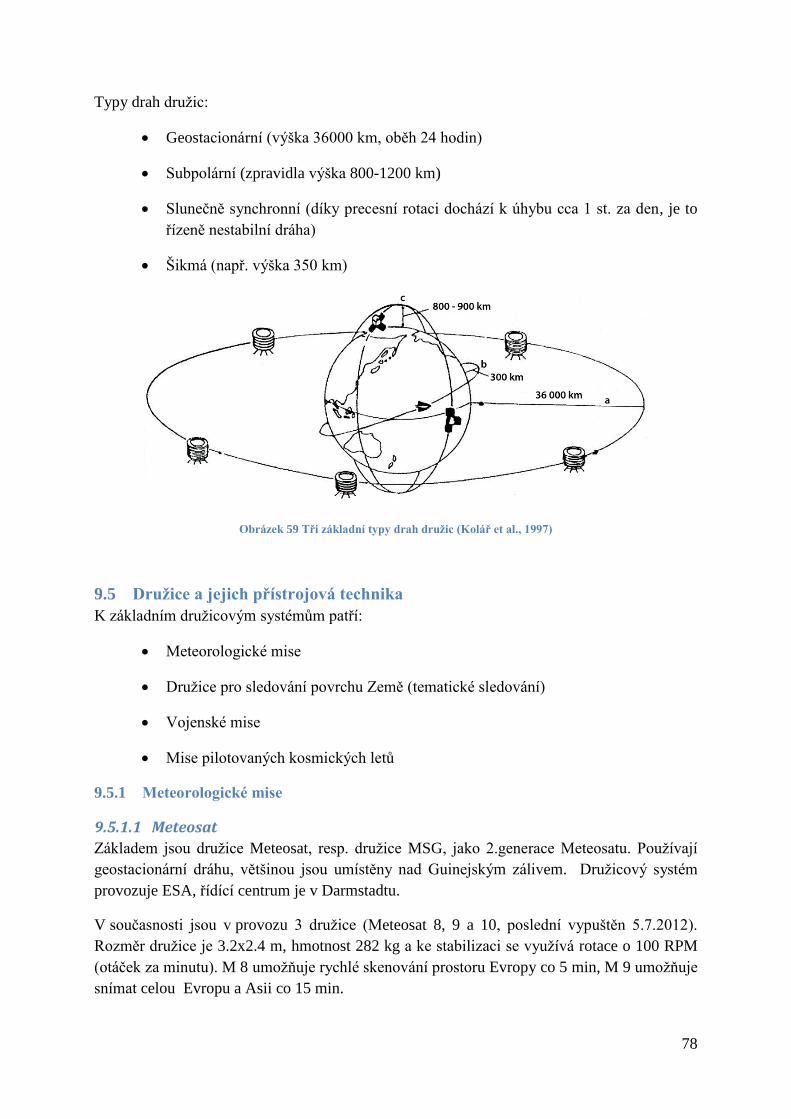
78
Typy drah družic:
Geostacionární (výška 36000 km, oběh 24 hodin)
Subpolární (zpravidla výška 800-1200 km)
Slunečně synchronní (díky precesní rotaci dochází k úhybu cca 1 st. za den, je to
řízeně nestabilní dráha)
Šikmá (např. výška 350 km)
Obrázek 59 Tři základní typy drah družic (Kolář et al., 1997)
9.5 Družice a jejich přístrojová technika
K základním družicovým systémům patří:
Meteorologické mise
Družice pro sledování povrchu Země (tematické sledování)
Vojenské mise
Mise pilotovaných kosmických letů
9.5.1 Meteorologické mise
9.5.1.1 Meteosat
Základem jsou družice Meteosat, resp. družice MSG, jako 2.generace Meteosatu. Používají
geostacionární dráhu, většinou jsou umístěny nad Guinejským zálivem. Družicový systém
provozuje ESA, řídící centrum je v Darmstadtu.
V současnosti jsou v provozu 3 družice (Meteosat 8, 9 a 10, poslední vypuštěn 5.7.2012).
Rozměr družice je 3.2x2.4 m, hmotnost 282 kg a ke stabilizaci se využívá rotace o 100 RPM
(otáček za minutu). M 8 umožňuje rychlé skenování prostoru Evropy co 5 min, M 9 umožňuje
snímat celou Evropu a Asii co 15 min.

79
Družice Meteosat nesou následující senzory:
GERB (Geostationary Earth Radiation Budget) – 7 pásem 0.01-3 μm, prostorové
rozlišení 40 km.
SEVIRI (Spinning Enhanced Visible and InfraRed Imager) – 12 pásem, prostorové
rozlišení 1000 m (HRV 0.5-0.9 μm) a 3000 m (pro interval 0.56 - 14.4 μm)
1.generace družic měla časové rozlišení 30 min a prostorové rozlišení 2.5 km a 5 km.
Chystá se 3.generace družic Meteosat.
Obrázek 60 Družice Meteosat (vlevo 1. generace a vpravo 2.generace) (http://en.wikipedia.org)
9.5.1.2 Družice NOAA (National Oceanic and Atmospheric Administration)
Aktuálně jsou v činnosti družice 15, 16, 17, 18, 19 (poslední vypuštěna 2.6.2009).
Družice používají subpolární dráhu, s výškou 830-870 km. Družice letí vždy 2 za sebou po
stejné dráze, proto jsou snímky každé oblasti nejvíce 6 hodin staré. Kromě snímkování se
provádí rovněž vertikální sondáž atmosféry, měří se koncentrace O3, mapuje se teplota oceánu
a počítá se vegetační index NDVI.
Družice nese senzory (příklad pro NOAA 19):
AVHRR/3 – má 5 pásem (R, NIR, MIR, 2x TIR), prostorové rozlišení 1.1 km
HIRS/4 (High Resolution Infrared Radiation Sounder)
AMSU-A (Advanced Microwave Sounding Unit)
SBUV/2 (Solar Backscatter Ultraviolet Spectral Radiometer)
MHS (Microwave Humidity Sounder)
Přípravu jedné z družic k vypuštění zpozdil incident v roce 2003, kdy došlo k pádu na
podlahu při manipulaci v hale, oprava stála 135 mil. USD.

80
Obrázek 61 Družice NOAA (http://3.bp.blogspot.com/-
6w5TdXEuXf0/UISxsOkJjKI/AAAAAAAAA0M/IphrAcocMjs/s1600/112077main_NOAANinstr.gif)
9.5.2 Družice pro tematické sledování
9.5.2.1 LANDSAT
Americké družice LANDSAT poskytují ucelenou řadu měření od r. 1972 a představují
nejvýznamnější systém družic pro sledování přírodních zdrojů. LANDSAT 7 pracoval
spolehlivě od 1999 do 2003, kdy se objevila chyba v řádkovém korektoru. Od 11.2.2013 je
v činnosti LANDSAT 8.
Základní přístrojem u poslední série družic je skener ETM+ (Enhanced Thematic Mapper
Plus). Pracuje buď v panchromatickém režimu s prostorovým rozlišením 15 m a nebo
v multispektrálním režimu, kde snímá v 8 kanálech s rozlišením 30 m (kromě TM6 v tepelné
části spektra, kde je prostorové rozlišení 60 m).
Družice má oběžnou dráhu ve výšce 705 km a opakuje snímkování stejné scény po 16 dnech
(časové rozlišení). Velikost scény je 185 x 185 km.
Obrázek 62 LANDSAT 8 (http://landsat.gsfc.nasa.gov/wp-content/uploads/2013/01/ldcm_2012_COL.png)
9.5.2.2 SPOT
Francouzské družice SPOT provozuje CNES, řídící středisko Toulose, od 1986. Používá
podélné skenování, pohledy dopředu a dozadu, vytváří stereopáry.
Družice SPOT 5 z roku 2002 má následující vybavení:

81
HRG (High Resolution Geometry) - rozlišení 2.5 m, 5m (PAN), 10m (MS)
HRS (PAN)
Výška dráhy je 832 km, doba oběhu 26 dní, inklinace je 98,7 st. a rozměr scény je 60x60 km.
Družice SPOT 6 byla vypuštěna 9/2012. Umožňuje panchromatické snímání s rozlišením 1.5
m, barevné také s rozlišením 1.5 m a multispektrální s rozlišením 8 m (4 pásma RGB+NIR).
Obrázek 63 LANDSAT 8 SPOT 5 (http://en.wikipedia.org/wiki/SPOT_(satellite))
9.5.2.3 Terra
Původně označovaná jako družice EOS (Earth Observing System), provozovaná NASA od
roku 1999. Využívá subpolární dráha ve výšce 705-725 km.
Nese následující přístroje:
ASTER (Advanced Spaceborne Thermal Emission and Reflection Radiometer) –
15 pásem, rozlišení 15 m (G, R, 2 NIR), 30 m (6 SWIR), 90 m (5 TIR). Používá se
pro tvorbu globálního digitálního modelu reliéfu.
CERES (Clouds and the Earth's Radiant Energy System)
MISR (Multi-angle Imaging SpectroRadiometer)
MODIS (Moderate-resolution Imaging Spectroradiometer) – 36 pásem, rozlišení
250 m, 500 m a 1000 m.
MOPITT (Measurements of Pollution in the Troposphere)
Primárně je družicový systém určen pro monitoring CO2, sledování aerosolového znečištění
a monitorování klimatu.
V roce 2008 byl zjištěn neautorizovaný přístup hackerů, ale žádný příkaz nedali.

82
Obrázek 64 Družice Terra (http://cimss.ssec.wisc.edu/satmet/modules/9_global_monitor/gm-8.html)
9.5.2.4 IKONOS
Ikonos byl 1. komerčním satelitem pro veřejnost s velmi vysokým rozlišením. Provozuje ho
společnost Spaceimaging. Byl vypuštěn v roce 1999 (1. ztroskotal, až 2. se podařil).
Dráha je polární slunečně synchronní, výška 681 km, scéna má rozměr 11 km, hmotnost
družice 720 kg a časové rozlišení je 3-5 dní při režimu off nadir (snímání nejen kolmé), 144
dní při režimu nadir (pouze snímání z nadiru).
Rozlišení je 0.8 m PAN (1m PAN), 4 m v MS (RGB NIR), 1 m v PAN sharpened.
Záznam dat je s přesností 11 bit nebo 16 bit (radiometrické rozlišení). Polohová přesnost je
12 m horizontálně, 10 m vertikálně. S vlícovacími body lze dosáhnout až 2, resp. 3 m.
Cena objednávky dat je min. 3000 USD, objednatel má právo na 3 pokusy snímání
požadované oblasti.
Obrázek 65 Start nosné rakety a vlastní družice IKONOS (http://satimagingcorp.tw.cn/satellite-sensors/ikonos.html)
9.5.2.5 QuickBird
QuickBird je další komerční družice a jejím vlastníkem je společnost DigitalGlobe.
Vypuštěna v roce 2001 na dráhu ve výšce 450 km. Prostorové rozlišení v PAN je 0.61 m
a 2.5m v MS. Radiometrické rozlišení je 11b. Časové rozlišení je 1-3.5 dne.

83
Obrázek 66 Družice QuickBird (http://www.exelisinc.com/solutions/QuickBird/Pages/default.aspx)
9.5.2.6 WorldView - 2
Komerční družice, provozovatel DigitalGlobe, vypuštěna v říjnu 2009.
Prostorové rozlišení je v PAN režimu pixel 0.5 m; v MS režimu je 8 pásem a pixel 1.8 m.
Oběžná dráha je ve výšce 770 km a 1 orbit trvá 100 minut.
Obrázek 67 Družice WorldView - 2
(http://news.satimagingcorp.com/2008/03/digitalglobe_anticipates_launch_of_worldview-2_satellite_sensor.html)
9.5.2.7 GeoEye -1
Komerční družice, vlastněná napůl NGA a Google, vypuštěna v 8/2008.
V PAN je rozlišení 0.41 m, ale to může využívat pouze US vláda, Google může využívat
rozlišení 50 cm a ostatní uživatelé nanejvýše 60 cm. V multispektrálním režimu je rozlišení
1.65 m. Scéna má velikost 15.2 km, dráha družice ve výšce 681 km, sklon dráhy 98 s.
GeoEye 2 byla vypuštěna v roce 2013 a má rozlišení 0.34 m v PAN a 1.36 m MS.
Obrázek 68 Družice řady GeoEye a Ikonos (http://www.satimagingcorp.com/satellite-sensors/)

84
Další družice s velmi vysokým rozlišením jsou FormoSat (v PAN rozlišení 2m), CartoSat
(v PAN 2.5m) a OrbView ( PAN 1m, MS 4m).
9.5.2.8 Sentinel
První družice programu Copernicus (dříve GMES) byla vypuštěna v dubnu 2014. Program
zajišťuje plný a otevřený přístup k datům.
Družice Sentinel 1 nese především SAR pracující v pásmu C pro monitoring mořského ledu
a pohybů zemského povrchu. Družice bude pracovat v páru. Prostorové rozlišení je 5-40 m
(v závislosti na pracovním módu), časové rozlišení pro družice v páru je max. 6 dnů. Dodávat
data má být schopna v téměř reálném čase. Testovací fáze končí v polovině července 2014.
Obrázek 69 Družice Sentinel 1 (http://www.turbosquid.com/3d-models/obj-sentinel-1-earth-observation/759136)
10 Principy zpracování dat DPZ
Při využití DPZ rozlišujeme 2 etapy:
1. etapa - sběr dat
2. etapa - zpracování dat, jehož cílem je zjištění požadované informace.
Obě etapy jsou nezbytnou podmínkou pro dosažení cíle.
Nutnou podmínkou úspěchu je, aby byla hledaná informace zjistitelná. Musí být zajištěno,
aby způsobené změny radiometrických veličin byly použitou technikou měřitelné (větší než
rozlišovací schopnost přístroje).
Kvalitu dat určují technické parametry přístroje, atmosférické vlivy, geometrické uspořádání
měření a intenzita zdroje záření. Souhrnně se označují jako vnější parametry.
Vnitřní parametry udávají druh nebo stav měřeného objektu (druhové a stavové parametry).
Zjistitelnost informace určují hlavně vnitřní parametry.

85
Požadované výsledné kategorie označujeme jako informační třídy. Prakticky musíme vždy
vymezit nějaké třídy, protože nejsme schopni zjišťovat informaci spojitě. Zkoumáme, jak jsou
jednotlivé požadované informační třídy od sebe odlišitelné.
10.1 Popis naměřeného souboru dat
Měříme radiometrickou veličinu f v místě (x,y), která závisí na:
čase t,
vlnové délce λ,
polarizační rovině p.
Kombinace těchto parametrů měření udává celkový počet měření v daném místě M. Proto
funkční hodnotu radiometrické veličiny zapisujeme jako fm(x,y). Označujeme ji jako
obrazovou funkci. Její funkční hodnoty jsou obrazovými daty a celý soubor je obraz.
Zobrazováním obrazové funkce se rozumí vizualizace. Pokud se v nich vyskytuje více hodnot
na stejném místě, jde o vícerozměrný soubor:
Multispektrální – hodnoty jsou rozlišeny měření v různé části spektra
Multitemporální – rozlišení v čase
Multipolarizační - rozlišení v polarizaci použitého záření.
Základní úlohu DPZ je možno formulovat následovně:
Je třeba nalézt souvislost mezi radiometrickou veličinou f(x,y) a vnitřními parametry objektů
na stejném místě s(x,y)
Přímá úloha: Na místě (x,y) jsou známy všechny vnitřní parametry s(x,y) a všechny
charakteristiky dopadajícího záření. Úkolem přímé úlohy je určit radiační veličiny f(x,y).
Obrácená úloha: Na místě (x,y) jsou známy hodnoty radiační veličiny f(x,y) a snažíme se
určit sadu stavových a druhových (tj. vnitřních) parametrů s(x,y), za předpokladu znalosti
charakteristik dopadajícího záření. To lze popsat vztahem, že f(x,y) určuje s(x,y), tedy f(x,y)
s(x,y). To lze zapsat jako f(x,y)= A[s(x,y)], kde A je přenosová matice.
V současnosti neumíme úplně popsat stav objektu pomocí sady vnitřních parametrů s(x,y).
Proto matici A známe jen pro vybrané, zjednodušené případy. S(x,y) závisí na čase a místě –
zpravidla ho proto musíme pro každé území a danou sestavu určovat znovu.
11 Analogové zpracování dat DPZ
Analogové zpracování dat DPZ je v současnosti na ústupu. Zabývá se především
vyhodnocováním fotografických snímků.

86
Zahrnuje především fotogrammetrické metody a metody interpretace fotografických snímků,
méně metody využívající speciálních zařízení, jako jsou:
denzitometr – slouží k měření optické hustoty negativu či diapozitivu při stálém
zdroji světla;
překreslovač – dovoloval exponovat na barevný papír syntézu multispektrálních
snímků;
směšovací projektor – umožňoval promítání a syntézu multispektrálních snímků.
Analogové fotogrammetrické metody využívaly zejména obkreslovače a stereoskopy a dnes
se již nepoužívají.
11.1 Interpretace fotografických snímků
Interpretace fotografických snímků představuje samostatný obor, jehož počátky sahají do
doby před 1. sv. válkou. Hlavní rozvoj však nastal až po 2. světové válce. Velký úspěch
zaznamenala při karibské krizi v roce 1962, kdy interpretace snímků z výzvědného letadla U-
2 odhalila instalaci odpalovacích zařízení a raket na Kubě.
Obrázek 70 Odhalená stanoviště raket a pomocného vybavení na Kubě 1962 (http://www.jamesshuggins.com/h/u-
2a/u-2_62_cuba_missile_base.htm)
Fotografický obraz je souhrnem optických, tvarových a fyzikálních vlastností
fotografovaného objektu a rovněž druhu a kvality fotografického materiálu.
Cílem fotointerpretace je získávání hlavně kvalitativní informace. K rozpoznávání objektů
používáme interpretační znaky, které vytváří výše uvedené faktory. S malou změnou
podmínek (osvětlení) dochází ke změně interpretačních znaků.
Interpretace fotografických snímků se rozděluje na vizuální, částečně automatizovanou nebo
plně automatizovanou (např. porovnání s definovaným vzorem). Při interpretaci je nutná
zkušenost a dedukce hodnotitele.

87
K interpretačním znakům patří:
Tvar a rozměr
Poloha, vztah k okolí
Jas a barva (přitom barva na snímku není zcela totožná s realitou)
Tón – stupeň zčernání
Stín
Textura – jemné změny tónu (řádkování, skvrny)
Struktura – vzájemné uspořádání základních obrazců
Příčinné souvislosti
Interpretační znaky dělíme na:
Přímé skutečné – takové znaky existují na snímku i ve skutečnosti (tvar, stín,
barva, rozměr).
Přímé neskutečné – jsou to znaky, které existují jen na snímku ale nikoliv v realitě
(textura, struktura, tón)
Nepřímé – využívají se druhotné znaky (poloha, sousední objekty, příčinné
souvislosti)
Postup interpretace při interpretaci fotografických snímků může být v zásadě dvojí:
Výběrová metoda – využití interpretačních klíčů, jednotlivé objekty pozorované na
snímku se porovnávají se vzorovými ukázkami a vybírá se klasifikace objektu
podle nejpodobnějšího vzoru. Tato metoda vyžaduje následující postup:
o Příprava a shromáždění všech dostupných informací o území, tvorba
fotomozaiky, fotoplánu, získání přehledu o situaci v celém území.
o Výběr charakteristických homogenních oblastí a určení jejich vlastností,
často využití podrobných snímků.
o Vyhodnocení nejasných a sporných území, vstup dodatečných informací a
případná rekognoskace terénu.
o Kontrola výsledků, namátková v terénu nebo provedená jinou osobou.
Eliminační metoda – využití eliminačního klíče, tj. přesného postupu vylučování
jednotlivých typů až dojde k zatřídění objektu.

88
Obrázek 71 Tvary koruny stromů (Žíhlavník, 1992)
Obrázek 72 Siluety stromů a tvary jejich stínu (upraveno podle Žíhlavník, 1992)
Tabulka 9 Interpretační klíč pro určování zdravotního stavu porostu jedle z infračervených snímků (upraveno podle
Žíhlavník, 1992)
Stupeň poškození Ztráta
jehličí %
Barva na
spektrozonálních
snímcích
Modifikující znaky
číslo Označení Struktura
koruny
Textura
koruny
1 zdravá 0-15 Zářivě červená Pozitivní:
žádná struktura
v oblasti
vrcholu
Pozitivní:
homogenní 2 Onemocňující 15-30 Špinavě červená,
purpurová
3 nemocná 30-60 Šedavě červená, i
světle červená se
šedavým závojem
Negativní:
Zřetelná
struktura nebo
„zamračený“
dojem
z rozpadající
se koruny
Negativní:
velmi silné
mramorování
4 Velmi
nemocná
60 a více Převážně šedé
body
Identifikace geologických objektů a struktur často využívá:
Geomorfologické znaky
Geobotanické znaky
Vývoj říční sítě

89
Rozdílná tvrdost hornin, resp. jejich schopnost odolávat erozi, způsobuje výrazně tvarové
a výškové změny, které jsou důležitými geomorfologickými znaky. Průběh výrazně odlišných
geologických těles na povrchu lze pak snadno ze snímků mapovat.
Výrazně se mohou projevovat i např. zlomy, kdy v důsledku pohybů na nich může docházet
ke vzniku příkrých svahů, nebo se projevují jako deprese v důsledku přítomnosti porušených
hornin v zóně zlomu, případně naopak jako elevace při vniknutí tvrdých žilných hornin do
zóny zlomu.
Geobotanické znaky jsou založeny na druhotné indikaci jistého horninového prostředí či
přítomnosti geologických struktur, zejména zlomů, prostřednictvím vegetace. Dobrým
příkladem jsou např. borovice, které dávají přednost písčitému podloží.
Vývoj říční sítě je zpravidla determinován geologickými podmínkami – vedle rozdílných
litologických charakteristik se projevuje zejména existence zlomů s porušenými (a tedy
erozně málo odolnými) horninami, vulkanických nebo glacigenních struktur.
Obrázek 73 Typy říční sítě podle různých hornin a klimatu: (1) gabra, (2,3) granity, (4,5) jílovité břidlice, (6) fylity
(Kumpera et al., 1986)
Typy říční sítě podle Dorniče (1975, in Kumpera et al. 1986):
Dendritická
Hřebínkovitá
Pravoúhlá (typická např. pro granitoidy)
Mřížkovitá

90
Paralelní
Radiálně odstředivá (např. izolovaný horský masiv, sopka)
Radiálně dostředivá (např. vulkanická kaldera)
Prstencovitá
Obrázek 74 Typy říční sítě podle Dorniče (1975, in Kumpera et al., 1986)
12 Digitální zpracování dat DPZ
Digitální obrazová data jsou výsledkem digitálních metod měření zobrazujícími přístroji
(zejména skenery), nebo výsledkem transformace původně neobrazových dat na obrazová
(např. radarová měření) nebo výsledkem digitalizace analogových záznamů měření, zejména
fotografických snímků. Představuje matici čísel (číselné hodnoty obrazu). Číselné hodnoty
(data file values) uloženy v rastrových souborech (image files) na paměťových mediích
počítače.
Každá číselná hodnota (hovoříme o DN, digital number) reprezentuje 1 obrazový element,
tedy elementární plošku obrazu - pixel nebo pel (picture element). Každá hodnota je pak
v obraze interpretována stejně (stejným stupněm šedi, případně barevných tónem). Velikost
pixelu udává prostorové rozlišení obrazu.

91
Číselná hodnota v obraze (DN) vyjadřuje průměrná hodnota pro plochu reprezentovanou
jedním obrazovým prvkem. Rozsah hodnot odpovídá radiometrickému rozlišení obrazu.
Sada číselných hodnot vytváří statistický soubor, který je zpravidla n-rozměrný, pokud tvoří
čísla víceobraz, tj. více obrazů ze stejného prostoru v členění dle obrazových pásem (podle
jednotlivých pásem, polarizace, či času).
Digitální obraz tedy tvoří obrazové elementy (pixely), které představuje horizontální
strukturování dat uvnitř souboru, a obrazové pásmo (band, layer), které představuje vertikální
strukturování dat uvnitř souboru.
Číselné hodnoty vznikají kvantifikací původně analogového signálu.
Obrázek 75 Kvantifikace signálu (Dobrovolný, 1998)
Organizace obrazových formátů se liší podle způsobu řešení ukládání obrazových vrstev
(pásem). Jako klasická řešení se uvádějí:
BSP (band sequentional)
BIL (band interleaving by line)
BIP (band interleaving by pixel)

92
Obrázek 76 Princip ukládání BIP, BIL, BSQ (Dobrovolný, 2005)
Číselné hodnoty v obrazu lze popsat pomocí histogramu. Ten udává frekvenci výskytu
jednotlivých hodnot obrazové funkce. Histogram typického snímku zemského povrchu není
nikdy rovnoměrný, protože ani jednotlivé typy povrchu nejsou stejně zastoupeny na snímku
(kromě vodních ploch).
Vlastnosti digitálního snímku:
Radiometrické rozlišení – počet úrovní, do kterých je zaznamenán obraz (jak
detailně je provedena kvantifikace signálu). Běžně 256 úrovní (např. TM) nebo
1024 (např. AVHRR), dříve 64. Odpovídá počtů stupňů šedi v obraze.
Spektrální rozlišení – počet částí spektra, digitalizovaných v obraze.
Panchromatický snímek obsahuje pouze 1 široké pásmo (viditelná část spektra).
Multispektrální snímek obsahuje několik pásem (jsou vymezeny rozsahem
frekvencí nebo vlnovými délkami). Hyperspektrální snímek obsahuje desítky
a stovky pásem, často velmi úzkých. Alternativním názvem je obrazová
spektrometrie.
Prostorové rozlišení – zjednodušeně udává velikost pixelu na zemském povrchu.
Časové rozlišení – frekvence opakovaného záznamu obrazu ze stejného území za
stejných podmínek. Např. LANDSAT má časové rozlišení 16 dní (tj. snímek
stejného území ze stejné pozice pořídí 1x za 16 dní).
Digitální zpracování obrazových dat DPZ zahrnuje následující operace:
1. Předzpracování (rektifikace a restaurace) – opravy chyb
Geometrické korekce – oprava polohových chyb

93
Radiometrické korekce – oprava radiometrických chyb (tj. chyb změřených
hodnot)
2. Zvýraznění obrazu – úpravy sloužící k usnadnění klasifikace
Bodová zvýraznění
Ohnisková zvýraznění (kernel)
Vícepásmová zvýraznění
3. Klasifikace – náhrada obrazových objektů (vymezených radiometricky) za
informační objekty (reálné objekty). De facto proces vytváření tematické mapy.
Klasifikace řízená a neřízená
Klasifikace per-pixel a per-objekt
4. Postklasifikační úpravy a spojování dat – finalizační úpravy tematické mapy
(např. eliminace příliš malých objektů).
Tabulka 10 Standardizované úrovně předzpracování snímku SPOT (SPOT Image) (podle GISAT, 2013)
Processing level Popis předzpracování 1A radiometrické korekce 1B radiometrické korekce a geometrické korekce, převzorkování = pixel
konstantních rozměrů (10 nebo 20m) 1AP úroveň 1A, pro fotogrammetrii
2 úroveň 1B, více přesnějších geometrických korekcí, pro kartografické aplikace 2A geometrické korekce provedeny bez identických bodů 2B geometrické korekce provedeny s identickými body, spojenými s topografickou
mapou S radiometrické korekce a geometrické převzorkování pro dvouscénovou registraci
S1 jedna vstupní scéna je zpracována v úrovni 1B S2 jedna vstupní scéna je zpracována v úrovni 2 3 Snímek je korigován s využitím identických bodů a DMR. Používá se při
vytváření ortofotomap.
12.1 Geometrické korekce
Geometrické korekce se označují také jako rektifikace obrazu. Provádí opravu polohy
jednotlivých měření. Originální data totiž obsahují velké polohové chyby a jsou nezbytné
polohové korekce, aby bylo možné snímek vlícovat do mapy.
Zdrojem zkreslení jsou geometrické chyby. Ty rozdělujeme na:
systematické (opakovatelné a současně předvídatelné)
náhodné - nepředvídatelné
Systematické chyby jsou popsány v kapitole 9.3.1 jako geometrické chyby, včetně způsobu
jejich nápravy. Pro jejich výpočet je nutno znát místo, výšku, rychlost a jiné charakteristiky
letu nosiče. Provádíme tzv. georeferenční korekce.

94
Náhodné chyby jsou způsobeny nahodilými výchylkami v dráze nosiče a záměru měřicího
zařízení. Jejich oprava se provádí po odstranění systematických chyb. Nelze použít analytické
rovnice, odstraňují se na základě geometrické (numerické) transformace obrazu pomocí
vlícovacích bodů. Částečně eliminují zbytky systematických chyb.
Rektifikace obrazu je procesem transformace dat z jedné matice digitálního obrazového
záznamu do druhé matice většinou s využitím polynomické transformace n-tého stupně.
Pixely musí být převzorkovány.
Základní kroky rektifikace jsou:
nalezení identických bodů (určení jejich souřadnic)
výpočet a test transformační matice (úpravy sady identických bodů)
vytvoření výstupního obrazového souboru
Identické body (Ground Control Points - GCP) jsou specifické pixely v rastrovém obrazu
se známými mapovými (nebo jinými) souřadnicemi. Ke každému identickému bodu
potřebujeme dva páry souřadnic X,Y:
zdrojové souřadnice (source coordinates) - souborové souřadnice zdrojového
obrazového záznamu
referenční souřadnice (reference coordinates) - souřadnice referenční mapy nebo
referenčního obrazového záznamu, vůči němuž je zdrojový obrazový záznam
registrován
Většinou má každý identický bod také identifikátor identického bodu (point ID).
Základní podmínkou úspěšnosti jakékoliv rektifikace je vhodné rozmístění identických bodů
– musí být rozmístěny rovnoměrně po celé transformované ploše, preferovány jsou pozice
blízko okrajů.
Dalším krokem rektifikace je stanovení transformačních rovnic, které zjišťují závislosti
mezi dvěma dvojicemi statistických souborů. Provádí se statistické zpracování (regresní
analýza) zdrojových a cílových souřadnic identických bodů. Cílem je nalezení
transformačních koeficientů pro polynomické transformační rovnice. Následuje popis
vybraných typů transformace.
Lineární konformní transformace
Lineární konformní transformace je podobnostní transformace. Vyžaduje minimálně 2
identické body. Vztahy mezi souřadnicemi popisují rovnice:
x’ = x*M*cosβ + y*M*sinβ + A
y’ = -x*M*sinβ + y*M*cosβ + B

95
kde M je změna měřítka, A a B posuny ve směru osy x a y, β je pootočení.
Tato transformace tedy provádí změnu měřítka (totožnou pro osu x i y), posun a pootočení.
Převzorkování není nutné. Je-li pro výpočet transformačních rovnic použito více než dvou
identických bodů, potom jsou koeficienty (M*cosβ, M*sinβ) vypočteny metodou nejmenších
čtverců (minimalizuje se tak suma rozdílů v poloze identických bodů).
Helmertova transformace je typem lineární konformní transformace, kde M=1
(transformace beze změny měřítka).
Afinní transformace je jednou z nejvíce používaných. Vyžaduje minimálně 3 identické
body. Transformaci popisují rovnice:
x’ = A*x + B*y + C
y’ = D*x + E*y + F
Koeficienty A, B, C, D, E a F se opět počítají metodou nejmenších čtverců.
Na rozdíl od lineární konformní transformace, zde dochází k různým změnám měřítka v ose x
a y. Jedná se o speciální případ polynomické transformace (polynomická prvního řádu).
Projektivní (kolineární) transformace se používá se pro letecké snímky (fotogrammetrie).
Vyžaduje 4 identické body. Transformuje jeden rovinný prostor do druhého (středové
promítání srovnává neparalelní grid na paralelní). Při transformaci se nezachovávají úhly.
Měřítko v obou směrech se mění nezávisle. Po aplikaci této transformace je už nezbytné
provést převzorkování.
Transformaci popisují rovnice:
1
hygx
cbyaxX
´ 1
hygx
feydxY
Obrázek 77 Projektivní transformace (Dobrovolný, 2005)

96
Polynomické transformace
Minimální počet identických bodů GCP pro polynomickou transformaci stupně t se odvozuje:
GCPsmin = (t+1)*(t+2)/2
Převzorkování (resampling)
Řada transformací (všechny, které mění nezávisle měřítka v osách) vyžaduje převzorkování
pixelů, tedy změnu jejich velikosti, orientace a především adekvátní změnu nesené hodnoty
DN. Převzorkování tedy musí popsat proces přenosu DN pixelů vstupní matice digitálního
obrazového záznamu do nových DN pixelů výstupní matice.
Mezi základní metody převzorkování patří:
princip nejbližšího souseda
bilineární interpolace
kubická konvoluce
Princip nejbližšího souseda (Nearest Neighbor)
Nová hodnota pixelu přebírá hodnotu nejbližšího pixelu. Dochází ke vzniku posunu obrazu až
o polovinu pixelu, vznikají nespojitosti v obrazu. Jako jediný způsob převzorkování je možno
provádět před klasifikací. Výpočetně je nejméně náročná.
Obrázek 78 Princip nejbližšího souseda
Bilineární interpolace (Bilinear Interpolation)
Nová hodnota v cílovém místě se počítá jako vážený aritmetický průměr ze 4 hodnot v síti
2x2 nejbližších hodnot.
Nejdříve se lineárně interpolují hodnoty v pomocných bodech na spojnici mezi body
pravidelné sítě, následně se lineárně interpoluje mezi pomocnými body cílové místo.

97
Pomocné body mají x souřadnici stejnou jako je cílové místo a y souřadnici podle bodů
původní sítě, případně naopak.
Výsledek mění DN pixelů, proto se nedoporučuje ji použít před klasifikací.
Následující rovnice nejdříve vypočtou hodnoty v pomocných bodech, z nich pak hodnotu
v cílovém místě (vztažný bod nového pixelu).
21
12
1011
12
0201
)(
)(
)(
)(z
xx
xxz
xx
xxg
22
12
1012
12
0202
)(
)(
)(
)(z
xx
xxz
xx
xxg
02
12
1001
12
020
)(
)(
)(
)(g
yy
yyg
yy
yyz
Kubická konvoluce
Nová hodnota v cílovém místě se počítá jako hodnota váženého průměru 16 hodnot v okně
4x4 nejbližších pixelů. Výsledek poskytuje ostřejší obraz než u bilineární interpolace.
Výpočetně je nejvíce náročná.
Transformace po částech
Předchozí transformace byly globální, tj. optimalizovaly a používaly jeden transformační
vztah pro celý obraz. Naproti tomu transformace po částech jsou lokální, exaktní
transformace. Využívají TIN model.
Topografické zkreslení
Žádná z uvedených korekcí neodstraňuje topografické zkreslení, tedy chyby způsobené
různou výškou terénu. Tyto chyby jsou významné pro měřítka 1:100000 a větší. Provádí se
ortogonalizace snímku s pomocí přesného DMT.
12.2 Radiometrické korekce
Radiometrických korekce znamenají restauraci obrazu. Příčinou nesprávných hodnot DN je,
že poloha nosiče se mění, stav atmosféry se mění, mění se výška slunce, je různý úhel
pohledu, různé roční období atd. Používá se aproximace přírodního stavu v modelu nebo se
snažíme chyby eliminovat. Upravují se DN hodnoty jednotlivých pixelů. Cílem je zajistit, aby
DN hodnoty obrazového záznamu co nejvíce odpovídaly skutečným odrazovým nebo
zářivým vlastnostem objektů.

98
Obrázek 79 Obraz území před a po radiometrické korekci (Dobrovolný, 2005)
Typy radiometrických korekcí:
Pomocí kalibrace měřícího zařízení,
opravy ze směru ozáření (Sun-Angle Correction),
opravy chyb vyplývajících z geometrie letu,
odstranění náhodných radiometrických chyb
opravy ze stavu atmosféry
Oprava pomocí kalibrace se většinou provádí automaticky, ještě na družici. Využívá se
periodické snímání referenčních ploch o známých vlastnostech (kalibrační lampy, Slunce,
tmavý vesmír) a provádí se korekce naměřených hodnot na základě zjištěné odchylky. Pro
provedení opravy je nezbytná informace o kalibraci senzorů nebo opravné koeficienty
v hlavičce obrazového záznamu.
Opravy ze směru ozáření (Sun-Angle Correction) slouží ke kompenzaci sezónních rozdílů.
Oprava je nutná především při studiu časových změn na stejném území (řada obrazových
záznamů). Důvodem je, že pro stejné povrchy se v různém čase kvůli různé výšce Slunce měří
různé DN. Řešení spočívá v tom, že se DN hodnoty přepočítají na imaginární ozařování ze
zenitu. V jednoduché variantě se předpokládá lambertovský povrch a tedy závislost intenzity
odraženého záření na kosinu úhlu dopadu:

99
cos
),(),(
jiDNjiDN
orig
Tvar reliéfu může zavádět chyby ve změně ozáření, zejména u snímků s vysokým rozlišením.
Proto se tvar reliéfu také započítává. Rovněž je třeba použít opravné koeficienty pro
kompenzaci skutečnosti, že většina objektů nemá lambertovský povrch.
Opravy vyplývající z geometrie letu se snaží odstranit změny úhlu ozařování, ke kterým
dochází i ve skenované řádce. Projevují se např. stíny vertikálně členitých objektů související
se směrem letu vzhledem ke Slunci (především u leteckých snímků), přivrácené versus
odvrácené svahy způsobující různou světlost.
Odstranění náhodných radiometrických chyb
Náhodné radiometrické chyby se projevují ve většině obrazových záznamů. Jejich příčinou
bývají výpadky senzoru nebo porucha při přenosu signálu k Zemi. Typy náhodných
radiometrických chyb:
„páskování“ obrazového záznamu,
vertikálně orientovaná nepřesná nebo chybějící data,
bitové chyby.
„Páskování“ obrazového záznamu se projevuje u mechanooptických skenerů, kdy díky
příčnému skenování se projevuje horizontální orientace „páskování“. Pásky se opakují
v pravidelné periodě. Jejich příčinou je výpadek nebo nepřesná kalibrace příp. senzitivita
senzoru. Chyba je viditelná zejména na rozsáhlých homogenních částech obrazu, jako jsou
vodní plochy.
Vertikálně orientovaná nepřesná nebo chybějící data se projevují u elektrooptických
skenerů (s podélným skenování). Chyby mají vertikální orientaci.
Bitové chyby jsou nepravidelně rozmístěné v ploše obrazového záznamu. Projevují se jako
chybějící nebo nepřesné radiometrické DN hodnoty jednotlivých obrazových elementů (velmi
světlé, velmi tmavé pixely).
Korekce náhodných radiometrických chyb odstraňuje zejména „páskování“ obrazového
záznamu. Eliminace se provádí před geometrickou korekcí. V zásadě se používá přizpůsobení
histogramu odlišného řádku nebo Fourierova transformace. Bitové chyby se eliminují filtrací.

100
Obrázek 80 Radarový obraz před a po odstranění páskování a jiného šumu (http://geog.hkbu.edu.hk/geog3610/lect-
08.pdf)
Atmosférické korekce
Atmosférické korekce jsou nejkomplikovanější formou opravy. Dochází k modifikaci DN
hodnot vlivem rozptylu, pohlcování (vliv vlnové délky λ) a také emisivitě atmosféry. Obsah
znečišťujících příměsí v atmosféře (kouřmo a zákal) může značně přispět k signálu měřenému
na čidle (až 80% v oblasti vlnových délek viditelného záření). Řešení se opírá o existenci
rozdílů v záři sledovaného objektu na zemském povrchu a září při snímání na nosiči:
)()0()()()()( xLLxxLxLxL AZAZ
Vyjadřuje se příspěvek atmosféry prostřednictvím přenosové funkce atmosféry či jiným
způsobem.
Typy atmosférických korekcí:
Korekce z modelu vlivu atmosféry
Tato korekce vyžaduje parametrizovat (popsat) vlivy atmosféry v okamžiku pořízení
obrazového záznamu, následuje vstup parametrů do numerických modelů a výpočet příspěvku

101
atmosféry. Je výhodné, pokud přímo na družici se měří některé potřebné parametry atmosféry
v době měření, např. přímé měření obsahu vodních par, kyslíku a ozónu na družici NOAA. Je
možné zohlednit roční dobu i geografickou polohu měření, také různé meteorologické prvky
(oblačnost, srážky, ...).
Používá se např. metoda 5S nebo metoda korekce pro NOAA (Halounová, Pavelka, 2005).
Metoda nejtmavšího pixelu
Velmi jednoduchá metoda, které spočívá ve zjištění příspěvku atmosféry na základě
vyhodnocení naměřeného signálu odpovídajícího vodní hladině. Využívá se skutečnosti, že
vyzařování vodních objektů v oblasti blízkého IR téměř nulové. Jakýkoliv naměřený signál
tedy je příspěvkem atmosféry a tento příspěvek se odečte od DN v obrazovém záznamu.
Jde o poměrně nepřesnou metodu, protože neuvažuje horizontální změnu příspěvku
v měřeném území.
Regresní analýza
Používá se především regresní analýza mezi jednotlivými pásmy multispektrálního obrazu.
Předpokládá se kompenzace lokálních vlivů topografie na vznik rozdílů v odrazivých
vlastnostech objektů.
Např. se povede regresní analýza mezi hodnotami pixelů pro červené a blízké infračerveném
pásmo (TM3 a TM4). Regresní rovnice pak protíná osu TM3 (tj. TM=0) v místě odpovídající
příspěvku atmosféry (obr. 81).
Jinou možností je provést regresní analýzu mezi daty naměřenými distančními metodami
a daty z pozemních měření. Taková metoda je ale poměrně časově a finančně náročná.
Obrázek 81 Regresní analýza mezi TM4 a TM3 s určením hodnoty A odpovídající příspěvku atmosféry (Dobrovolný,
1998)
12.3 Zvýraznění obrazu
Cílem zvýraznění obrazu je provedením takových úprav, které zvýrazní požadovanou
informaci a potlačí nežádoucí informace ve snímku tak, aby se zvýšila úspěšnost následující

102
klasifikace obrazu. Před zvýrazňováním je nutné provést předzpracování obrazu, zejména
odstranění šumu, jinak může dojít ke zvýraznění těchto chyb obrazu.
Pro zvýraznění neexistuje univerzálně platný postup, existují pouze obecné zásady a znalost
nejvíce používaných algoritmů. Zpravidla je potřebné kombinovat více technik k dosažení
nejlepšího výsledku.
Metody zvýraznění obrazu se dělí na bodová zvýraznění (provádí se manipulace s DN
hodnotami v jednotlivých pixelech bez ohledu na okolí), prostorová zvýraznění (zejména
ohnisková, kdy se DN hodnoty mění v závislosti na situaci v okolí) a vícepásmová zvýraznění
(pro zvýraznění informace se použije kombinace DN hodnot z více obrazových pásem).
12.3.1 Bodové zvýraznění
Prahování rozdělí všechny DN hodnoty obrazu na hodnoty nižší a vyšší než je stanovená
hraniční hodnota a přiřadí jim 0 a 1, čímž vzniká bitový obraz. Metoda se používá zejména
pro konstrukci masek, které je možné následně efektivně využít pro např. klasifikaci obrazu
po částech.
Obrázek 82 Prahování obrazu (Dobrovolný, 2005)
Hustotní řezy jsou rozšířením techniky prahování. Namísto jedné hraniční hodnoty se volí
více prahových hodnot a rovněž výsledek není kódován mezi 0 a 1, ale s více hodnotami
(výstupní třídy). Počet tříd a určení prahových hodnot se zpravidla zjišťuje z histogramu
obrazu.
Účinek techniky spočívá ve zjednodušení obrazu a zvýraznění rozdílů mezi třídami. Využívají
se např. pro zobrazení spojitých jevů (nadmořská výška, teplota apod.) (Dobrovolný 1998).

103
Obrázek 83 Hustotní řezy (Dobrovolný, 2005)
Roztažení histogramu je úpravou kontrastu obrazu. Původní histogram obsahuje DN
v určitém rozmezí a nevyužívá se celého rozsahu stupnice šedi. V důsledku se špatně rozlišují
rozdíly stupňů šedi v původním obrazu. Používá se několik variant roztažení:
Lineární roztažení histogramu – původní rozsah hodnot DN se roztáhne na maximální možný
rozsah a úměrně tomu se lineárně přepočtou původní DN hodnoty na nové podle vztahu:
minmax
min)(*255)(
II
IxIxO
kde I(x) je vstupní hodnota, Imin minimální vstupní hodnota, Imax je maximální vstupní
hodnota
Obrázek 84 Princip lineárního roztažení histogramu (Dobrovolný, 1998)

104
Roztažení vyrovnáním histogramu (equalizace) – nelineární technika roztažení, která dociluje
lepšího vyrovnání výsledného histogramu, tj. co nejvíce vyrovnaného zastoupení jednotlivých
stupňů šedi ve výsledném obraze. Málo četné hodnoty DN se tedy ve výsledku seskupí,
zatímco více četné hodnoty DN se od sebe více vzdálí, čímž se od sebe v obraze lépe odliší.
Obrázek 85 Princip roztažení vyrovnáním histogramu (Dobrovolný, 1998)
Obrázek 86 Vyrovnání četností v třídách histogram při ekvalizaci (Dobrovolný, 2005)
Vysvětlivky: data file values – hodnoty v datovém souboru, output data file values – hodnoty ve výstupním datovém
souboru
Roztažení zvýrazněním části histogramu – pro roztažení se použije jen část původních DN
hodnot, které se lineárně roztáhnou na maximální rozsah. Tím dojde k jejich zvýraznění
a vnitřnímu rozlišení. Ostatní DN hodnoty (mimo roztahovaný interval) jsou vymazány.

105
Obrázek 87 Princip roztažení zvýrazněním části histogramu (Dobrovolný, 1998)
Roztažení se saturací histogramu – de facto jde o roztažení střední části histogramu
s vyloučením krajních členů, které mohou představovat šum v obraze. Klasická technika
lineárního roztažení je totiž často neúčinná, protože minimální a maximální hodnoty
v původním obraze se díky několika extrémním pixelům (s extrémními hodnotami DN) liší
jen málo od maximálního možného rozsahu, což neumožňuje dosáhnout výraznějšího
zvýraznění. Při saturaci se volí jistý počet extrémních pixelů, který má být potlačen (např.
2.5 % z každé strany)
Obrázek 88 Princip roztažení se saturací histogramu (upraveno podle Dobrovolný, 1998)
Barevné zvýraznění
Lidské oko rozezná asi 10x více barevných tónů (odstínů) než úrovní šedí, celkově to může
být asi 200 tónů. Při prohlížení černobílého obrazu registrujeme pouze změny jasu. Proto je
přirozené, že použitím transformace do barevného schématu se dociluje lepšího rozlišení
jednotlivých stupňů.
U barvy rozlišujeme 3 základní aspekty: tón (odstín) H, sytost (S) a jas (B).

106
Použití barev spočívá ve 2 základních možnostech:
obarvení 1 pásma – vznikají pseudobarvy (protože nemají nic společného
s reálnými barvami původního obrazu, např. černobílý snímek obarvíme), které
umožní lépe rozlišit jednotlivé třídy hodnot. Transformace se provádí buď spojitou
nebo diskrétní funkcí.
Barevná syntéza – využijí se 3 složky víceobrazu, kde každé složce se přiřadí jiná
barva. Ve výsledku se hovoří o:
o Skutečné barvy – odpovídá původnímu rozložení barev. Snímku z červené
části spektra se přiřadí červená barva, z modré části spektra modrá barva
a zelené části spektra zelená barva.
o Nepravé barvy – neodpovídá původnímu významu barev. Použijí se jiné
kombinace (např. IR, R, G).
Obrázek 89 Syntéza v přirozených barvách (Dobrovolný, 2005)
12.3.2 Prostorové zvýraznění
Prostorová zvýraznění zahrnují ohniskové operace (filtrace) a Fourierovy transformace.
Ohnisková operace
Ohniskové operace (filtrace) využívají pohyblivé okénko (kernel), vypočítá se nová hodnota
ve středu okna a zapíše se do výsledného obrazu. Okolí se zpravidla vymezuje jako 3x3 nebo
5x5 pixelů. Rozlišují se 2 základní typy filtrace:

107
Nízkofrekvenční filtry (filtry s nízkou propustností) průměrují a vyhlazují,
zdůrazňují nízké frekvence.
Vysokofrekvenční filtry (filtry s vysokou propustností) zostřují obraz a zdůrazňují
vysoké frekvence. Patří k nim hranové operátory.
Obrázek 90 Vysokofrekvenční (vlevo) a nízkofrekvenční (vpravo) informace (Dobrovolný, 1998)
Filtrace je založena na použití filtrovacího okna (kernelu). Filtrovací okno představuje
čtvercovou matici, v jejíchž buňkách jsou zapsány váhy. Filtrovací okno se pravidelně
posouvá po vstupním obraze (s krokem 1 pixel, konvoluce), vynásobí se DN hodnoty obrazu
a váhy z filtrovacího okna a výsledek se zapíše do centrálního pixelu ve výsledném obrazu.
Pro okrajové pixely se buď výpočet neprovádí nebo se tam replikují sousední hodnoty.
Obrázek 91 Princip filtrace (Dobrovolný, 1998)

108
12.3.2.1 Nízkofrekvenční filtry
Používá se řada filtrů s podobným účinkem.
Průměrový filtr – v okně se spočítá aritmetický průměr, zaokrouhlí se na celé číslo a zapíše
do centrální buňky (ve výsledné vrstvě). Operace se dá zapsat pomocí vztahu (od centrálního
pixelu započítání sousedních buněk v horizontálním k směru i vertikálním l směru):
1
1
1
1
),(9
1),(
k l
ljkifjip
Nebo pomocí filtrovacího okna, kde všechny buňky obsahují váhu 1.
Průměrový filtr ničí liniové elementy, shlazuje nehomogenity a částečně odstraňuje šum.
Tento typ filtrace lze snadno upravit např. vypuštěním započítání centrálního pixelu.
Filtry s váženým středem – centrální pixel dostává jinou váhu než sousední pixely. Pokud je
jeho váha větší, je výsledné shlazení menší. Pokud je váha centrálního pixelu menší, je ve
výsledku více odstraňován šum.
Průměrování pro liniové prvky – používají se rozdílné váhy v okně, liniově uspořádané.
Prosté průměrování ničí lineární prvky, proto se používají se varianty rotujícího okna (s různě
orientovanými rozmístění vah) a další metody (výpočty gradientů, rozptylů). Např. se
vynásobí uvedené matice s obrazem a kde je součin minimální, taková váhová matice (okno)
se použije pro průměrování.
Obrázek 92 Různé lineární uspořádání vah v rotujícím oknu
Průměrování s inverzním gradientem - gradient určí směr možné linie v obrazu. Podle
tohoto směru se vybere vhodný postup průměrování.
Nejbližší soused - pro průměrování se použijí jen ty pixely, jejichž rozdíl v DN od
zpracovávaného pixelu je menší než stanovená hranice. Průměr se tedy vypočte jen
z „blízkých“ hodnot, které mají nízký rozptyl.
Mediánová filtrace - v okně se určí medián, který se aplikuje do výsledného obrazu.
Průměrování s rotujícím oknem - k dispozici je sada oken, které se liší jen rotací hodnot ve
stejném vzoru. Pro průměrování se vybere to okno, které poskytuje po aplikaci nejmenší
rozptyl.

109
Obrázek 93 Sada filtrů s různým uspořádáním vah (rotující okno)
Módová filtrace – zjistí se hodnota módu ve filtrovaném okně (nejčetnější hodnota), která se
použije do výsledku.
Sieve filtrace – z výsledků se odstraní ty plošky, jejichž plocha je menší než nastavený limit.
Při vstupu se zadává se maximální velikost polygonu (počet pixelů), který se má eliminovat.
Nepoužívají se k průměrování, ale pro úpravu výsledků klasifikace.
Gaussův filtr – ve filtrovacím okně se uplatní váhové koeficienty odvozené z Gaussovy
funkce V.
1
1
1
1
),(*),(9
1),(
k l
jipjiVjip
12.3.2.2 Vysokofrekvenční filtry
Vysokofrekvenční filtry jsou filtry, které zvýrazňují rozdíly hodnot v obraze (přesněji
centrálního a okolních pixelů).
Jednou z významných aplikací je zvýraznění hran.
Hranou rozumíme skokovou změnu DN. Rozlišujeme 3 typy hran:
Střechová hrana – světlá linie na tmavé pozadí
Příkopová hrana – tmavá linie na světlém pozadí
Stupňová hrana – rozhraní mezi 2 oblastmi
Problém definice hran nastává u multispektrálního obrazu – má být hrana definována v každé
části spektra nebo jen v některé?
Před detekcí hran je nutné provést ztenčování hran. Pokud linie nemá šířku 1 pixelu, je třeba ji
na ni redukovat. Je třeba rozlišit případy, kdy chceme zvýraznit hrany jen v jednom směru a
situace, kdy potřebujeme zvýraznit všechny hrany bez rozdílu orientace:
Známá orientace hran - zkoumání probíhá kolmo na směr, nejvyšší hodnota se
považuje za osu hrany, ostatní se nastaví na 0.

110
Neznámá orientace – používá se okno o rozměrech 3x3 a zkoumá se, zda není
středový pixel zbytečný (pak se nastaví na 0).
Ostřící filtry – jsou účinným postupem získání vysokofrekvenčního obrazu. Na původní obraz
se aplikuje nízkofrekvenční filtr a získá se vyhlazený obraz. Vyhlazený obraz se odečte od
původního obrazu a vzniklý rozdílový obraz se připočte k původnímu obrazu. Tím se
zvýrazní lokální odchylky.
Laplaceovské filtry – váhy v jednotlivých buňkách filtrovací okna jsou nastaveny tak, aby
hodnota váhy ve středovém pixelu byla rovna zápornému součtu hodnot vah ve všech
ostatních buňkách (současně se tím zajistí, že suma vah je rovna nule). Filtr na výstupu zvětší
odstupy hodnot středové buňky proti okolí.
Sobelův filtr – proti Laplaceovskému jsou váhy lineárně uspořádány, suma je opět rovna nule.
Filtr zdůrazňuje všechny horizontální a vertikální hrany v obraze. Kombinací obou směrů lze
získat výsledný gradient.
Obrázek 94 Příklad Sobelových filtrů
Prewittův filtr – podobný předchozímu, váhy v krajních pruzích jsou ale vyrovnané. Slouží
také k detekci hran a i zde je možné vypočítat výsledný gradient.
Obrázek 95 Příklad Prewittových filtrů
12.3.2.3 Textura
Textura hodnotí míru uspořádanosti či celistvosti sledovaných objektů. Zkoumá plošnou
proměnlivost tónů uvnitř obrazu. Použití je významné zejména pro radarové snímky.
Jako míry textury se používají gradientové operátory nebo statistické momenty v obrazovém
okně (např. rozptyl, variační koeficient, koeficient šikmosti, koeficient špičatosti, entropie),
nebo se využije popis kombinace hodnot GLCM (Grey Level Coocurrence Matrix)
Např. výpočet rozptylu pro okno:
3
1
3
1
3
1
3
1
3
1
2
1
2 ),(),(3
1),(
3
1),(
i j i j i j
jifjifjifjip

111
12.3.2.4 Porovnání se vzorem
Provádí se vyhledávání obrazových primitiv v obraze na základě porovnání se vzorem. Cílem
je nalézt pravděpodobné objekty podobných obrazových vlastností jako má vzor (např. tanky
v krajině). Porovnání se provádí na základě podobnosti, která může být měřena vzdáleností,
konvolucí nebo korelací. Korelace poskytuje nejlepší výsledky (nejmenší ovlivnění rozdíly v
jasu, v osvětlení). Vzor může být např. obdélník m x n, vyjádřený maticí obrazové funkce
t(i,j), kde i=1,m a j=1, n.
Výpočty míry podobnosti:
Vzdálenost
m
k
n
l
lktljkifjis1 1
2),()1,1(),(
Konvoluce
m
k
n
l
lktljkifjicon1 1
),(*)1,1(),(
Korelace
m
k
n
l
m
k
n
l
lktxljkif
jiconjir
1 1 1 1
22 ),()1,1(
),(),(
12.3.2.5 Fourierovy transformace
Fourierovy transformace jsou založeny na transformaci dat pomocí skládání goniometrických
funkcí sin a cos o různých amplitudách a frekvencích. Výsledek Fourierovy transformace
snímku lze zobrazit jako Fourierovo spektrum, ve kterém se zapisují nalezené nízké frekvence
blízko středu spektra, zatímco vysoké frekvence v blízkosti okrajů. Kromě frekvence záleží
i na orientaci hran či linií v obraze – ve Fourierově spektru se zobrazují kolmo na původní
směr (tj. linie horizontální se zobrazí ve Fourierově spektru jako vertikální linie). Stupeň šedi
ve Fourierově spektru udává četnost příslušné frekvence.
Postup je takový, že se obraz transformuje do Fourierova spektra zpravidla pomocí Fast
Fourierovy transformace (FFT), získá se spektrum, na spektrum se aplikují vhodné filtry,
výsledek se zpětně transformuje do obrazu pomocí inverzní Fourierovy transformace IFT.
Pokud chceme odstranit šum z obrazu, použije se na spektrum kruhový filtr, který ponechá
jen vnitřní část kruhu (nízké frekvence). Pokud naopak chceme zvýraznit vysoké frekvence,
použijeme kruhový filtr s ponecháním vnější části spektra. Pokud chceme zrušit linie jistého
směru, aplikujeme na spektrum klínový filtr kolmého směru.

112
Obrázek 96 Princip využití Fourierovy transformace pro zvýraznění hran v obraze (vlevo) a naopak pro vyhlazení
obrazu (vpravo) (Dobrovolný, 1998)
Obrázek 97 Princip využití Fourierovy transformace pro odstranění horizontálního páskování obrazu (Dobrovolný,
2005)
12.3.3 Spektrální zvýraznění
Spektrální zvýraznění zahrnují především manipulace s víceobrazem.
K typickým patří dělení obrazu obrazem a používání poměrů obrazových pásem. Pomocí nich
lze rozlišit jemné spektrální změny. Zvýrazní se změny ve sklonu křivek spektrální
odrazivosti bez ohledu na absolutní hodnoty. Z n pásem lze vytvořit n*(n-1) poměrů, resp. 1/2
(bez ohledu na pořadí). Z tohoto množství lze vybrat ty poměry, které využívají pásma s co

113
nejvíce odlišnou informací, což je základem OIF (optimum index factor), které umožňuje
doporučit pásma s největším OIF a tedy teoreticky největším přínosem.
Velmi významné jsou vegetační indexy. Zpravidla je v čitateli pásmo, které zvýrazňovaný
povrch intenzivně odráží, zatímco ve jmenovateli pásmo, které daný povrch významně
pohlcuje (Dobrovolný, 1998). Např. TM4/TM3 jako vegetační index, TM3/TM1 jako index
zvýrazňující půdy s obsahem oxidů železa („červenice“), TM5/TM7 jako index zvýrazňující
půdy s vyšším obsahem jílových minerálů.
Pokud se ve výsledném obraze použijí pouze poměry do syntézy, může chybět informace
o absolutních hodnotách. Pokud se použije i 1 původní pásmo, vzniká hybridní syntéza.
Stejně jako u dalších forem zvýraznění obrazu se doporučuje provést předzpracování. Zvláště
u použití poměrů je třeba odstranit šum např. atmosférický opar.
Vegetační indexy
Používá se řada vegetačních indexů, nejčastěji normalizovaný vegetační index nebo
transformovaný vegetační index.
34
34
TMTM
TMTMNDVI
12
12
AVHRRAVHRR
AVHRRAVHRRNDVI
100*5,034
34
TMTM
TMTMTVI
TVI udává množství zelené biomasy, ukazatel je ale nutno kalibrovat.
Analýza hlavních komponent – je klasickou metodou vícerozměrné statistiky. Přepočítává
původní obrazová pásma (původní proměnné) do soustavy nových, umělých proměnných
(nových obrazových pásem) s cílem maximalizace rozptylu v soustavě nových proměnných
při jejich co nejnižším počtu. Metodou lze efektivně snížit objem dat, se kterými se pracuje,
významnější je ale její efekt ve schopnosti koncentrovat známé informace napříč původními
pásmy do několika nových, informačně velmi bohatých pásem, které lze následně využít pro
syntézu.
Obecně je možné napsat jednotlivé hlavní komponenty jako:
PC1=a1TM1 + a2TM2+a3TM3+a4TM4+a5TM5+a6TM7
PC2=b1TM1 + b2TM2+b3TM3+b4TM4+b5TM5+b6TM7
atd.
Tabulka 11 Příklad rozkladu víceobrazu na hlavní komponenty (Dobrovolný, 1998)

114
Číslo
PC
Vlastní
čísla
Procenta
rozptylu
Kumulovaná
procenta
zátěže
TM1 TM2 TM3 TM4 TM5 TM7
1 2262,96 75,62 75,62 0,243 0,181 0,346 0,230 0,728 0,454
2 682,34 22,80 98,42 0,115 0,050 0,229 -0,936 -0,012 0,237
3 33,80 1,13 99,55 0,553 0,323 0,513 0,201 -0,531 -0,064
4 7,79 0,26 99,81 -0,264 -0,141 -0,037 0,168 -0,432 0,833
5 4,54 0,15 99,96 0,712 -0,102 -0,668 -0,034 0,000 0,186
6 1,21 0,04 100,00 -0,212 0,911 -0,343 -0,044 -0,022 0,069
Obrázek 98 Výsledné hlavní komponenty (Dobrovolný, 2005)
Analýza obecných komponent - je také běžnou metodou vícerozměrné statistiky.
Přepočítává původní obrazová pásma do soustavy nových, umělých proměnných (nových
obrazových pásem) s cílem jejich maximální separace. Tedy jednotlivé shluky mají být od
sebe co nejvíce vzdáleny a naopak vnitřní variabilita (rozsah hodnot ve shluku) má být co
nejmenší.

115
Obrázek 99 Princip odvození obecných komponent CC (Dobrovolný, 1998)
Transformace IHS
Transformace IHS představuje změnu barevného modelu z tradičního RGB na IHS, kde I je
Intensity (jas), H je hue (tón, tedy barevné určení) a S znamená Saturation (sytost,
reprezentuje čistotu barvy vzhledem k odstínu šedé). Výhodou IHS modelu je možnost
samostatně upravovat jednotlivé složky bez vlivu na ostatní (např. změna jasu obrazu, aniž by
se změnilo barevná situace obrazu). Definice jednotlivých os je zřejmá z obr. 100.
Tato transformace RGB<->IHS se využívá pro:
Zvýraznění obrazu – konverze do IHS, zvýraznění jedné či více složek IHS, zpětná
transformace do RGB.
Zvýraznění AVHRR (pouze 2 pásma) - 1.p.+2.pásmo do I; 2.p./1.p. do H; 1.p.-
2.p.=S
Pro fúzi dat s různým rozlišením (např. PAN a MS)
Pro fúzi dat z různých typů senzorů
Odlišení jemných změn v plochách hornin – např. MSS4, MSS5, MSS7 do složky
I, MSS5/MSS4 do H a MSS5/MSS6 do S; Pak zpětná transformace do RGB.
Podobně geologické struktury pro SEASAT
Tvorba zavěšených map na reliéfu: obraz mapy do I, DMT do H a 127 do S.
Následuje opět zpětná transformace do RGB.

116
Obrázek 100 Uspořádání modelu IHS (Kolář et al., 1997)
Doporučuje se, aby data s největším prostorovým informačním obsahem by měla být uložena
do složky jasu, data s největším dynamickým rozsahem (rozsah hodnot, radiometrické
hodnoty) by měla být přiřazena tónu. Rozdíly v sytosti jsou málo postřehnutelné, a proto se do
této složky modelu dává nejméně výrazná sada dat.
Transformace Martin-Taylor – provádí se změna barevného modelu na model, který lépe
odpovídá citlivosti lidského oka. Osami M-T systému jsou jas, červeno-zelená barva a modro-
žlutá barva. Jejich pořadí odpovídá pořadí důležitosti v lidském vidění.
12.4 Klasifikace
Klasifikace představuje nejvýznamnější krok při zpracování obrazu – poskytuje informace, co
se na snímku nachází. Jednotlivým obrazovým třídám a prvkům je přiřazen informační
význam. Více formálně lze uvést, že se provádí zobrazení mezi obrazovými třídami
a informačními třídami. Původní hodnoty radiometrických charakteristik, které vyjadřují
spektrální (a jiné) vlastnosti objektů a jevů v obraze, se nahrazují hodnotami informačních
tříd.
Obsah a účel informačních tříd je potřebné definovat na začátku procesu klasifikace
(definujeme tzv. klasifikační schéma).

117
Klasifikace je založena na použití tzv. klasifikátorů, tj. rozhodovacích pravidel, podle
kterých provádí zatřídění prvků obrazu do cílových informačních tříd. Využívají se typické
příznaky jednotlivých objektů a jevů. Podle charakteru pravidla lze rozlišit klasifikátory:
Spektrální chování – využívají odlišnosti objektů ve spektrálním projevu. Jsou
nejvíce používány.
Prostorové chování – využívají odlišného prostorového uspořádání či
prostorových charakteristik. Jde např. o vlastnosti jako je odlišná velikost, tvar,
textura, vzájemná vzdálenost nebo prostorový kontext.
Časové chování – využívají časové proměnlivosti spektrálního nebo prostorového
chování objektů a jevů v obraze. Typické je využití zákonitostí fytogeneze
u rostlin.
Podle různých hledisek rozlišujeme klasifikace:
Klasifikace řízená a neřízená – při řízené klasifikaci specifikuje uživatel požadované cílové
třídy pomocí příkladů (tréninková množina), čili přímo řídí specifikaci informačních tříd. Při
neřízené klasifikaci program vytváří umělé třídy, do kterých zařadí všechny pixely na obraze,
teprve následně uživatel musí určit význam těchto tříd a provést vhodnou transformaci do
požadovaných informačních tříd.
Hybridní klasifikace – spojuje výhody řízené a neřízené klasifikace.
Klasifikace per-pixel a per-objekt - klasifikace per-pixel znamená provádění klasifikace pro
každý pixel obraz zvlášť, prakticky bez ohledu na výsledek klasifikace v jeho okolí. Naproti
tomu klasifikace per-objekt nejdříve vymezí objekty v obraze a pak teprve určuje jejich
význam (informační třídu).
Obrázek 101 Princip neřízené a řízené klasifikace (podle Lillesand et al., 2008)
Vysvětlivky: image dataset – obrazový soubor. clustering – shlukování, use clusters to define signatures or use clusters
as classes – použití shluků pro definování obrazových tříd nebo informačních tříd, seed area (example pixels) –
vzorová oblast (příkladové pixely), signature information – informační třídy, use a decision rule to class each pixel –
použití rozhodovacího pravidla pro klasifikaci každého pixelu, thematic image – tematický obraz (mapa)

118
12.4.1 Řízená klasifikace
Řízená klasifikace zahrnuje tréninkové stádium a klasifikační stádium.
12.4.1.1 Tréninkové stádium
Tréninkové stádium je určeno pro vymezení trénovacích ploch pro každou třídu. Trénovací
plochy musí být reprezentativní – musí být dostatečně velké, homogenní, vybrané z více míst
než z 1 plochy. Může být důležité i jejich umístění, zejména pro schopnost identifikovat je
a ověřit v terénu. Pro jejich přípravu je nutná dobrá znalost území z terénního průzkumu nebo
z jiných zdrojů dat.
Trénovací plochy musí obsahovat stanovený minimální počet pixelů (nejméně n+1, kde n je
počet kanálů, ale doporučení je 10n až 100n).
Sada trénovacích ploch tvoří trénovací množinu.
Při přípravě trénovacích ploch se provádí kontrola výběru pomocí statistického hodnocení
vhodnosti navržených tříd. Je třeba posoudit u jednotlivých tříd a vzájemně:
Histogram
Graf koincidence
Rozptylogram
Je nutné zjistit, zda jsou třídy homogenní, zda neobsahují anomální hodnoty, zda jsou
separovatelné mezi sebou.
Obrázek 102 Volba trénovacích ploch (Dobrovolný, 2005)

119
Obrázek 103 Graf koincidence pro pásma TM2, TM4 a TM5 (Dobrovolný, 2005)
Je potřebné rozhodnout o výběru pásem. Hodnotí se divergence mezi pásmy a vybírají vhodná
pásma pro klasifikaci.
12.4.1.2 Klasifikační stádium
První krokem je volba klasifikátoru. Běžné jsou následující klasifikátory:
Klasifikátor minimální vzdálenosti od průměru – pixel je zařazen do té třídy,
k jejímuž centru má nejblíže.
Rovnoběžnostěnový (parallelpiped) klasifikátor - pixel je zařazen do té třídy, do
jejíhož rozsahu hraničních hodnot spadá.
Nejbližšího souseda - pixel je zařazen do té třídy, kde najde nejbližší sousední
pixel
Maximální pravděpodobnosti (maximum likelihood) - pixel je zařazen do té třídy,
pro kterou má největší pravděpodobnost zařazení
Bayesovský klasifikátor – využívá se Bayesovské kombinace 2 pravděpodobností -
apriorní pravděpodobnost výskytu třídy (např. třída písek se vyskytuje méně
pravděpodobně než městská zástavba) a pravděpodobnost zařazení do třídy
z klasické klasifikace. Na jejím základě je získána výsledná pravděpodobnost
zařazení do třídy.

120
Obrázek 104 Klasifikátor minimální vzdálenosti od průměru (Clevers, 1999)
Obrázek 105 Klasifikátor rovnoběžnostěnový (parallelpiped) (Clevers, 1999)

121
Obrázek 106 Klasifikátor nejbližšího souseda (Clevers, 1999)
Obrázek 107 Klasifikátor maximální pravděpodobnosti (Clevers, 1999)
Druhým krokem je vlastní provedení klasifikace. Při něm počítačový program přiřazuje
každému pixelu v obraze identifikátor informační třídy, kterou podle zvoleného algoritmu
(klasifikátoru) určil. U řady klasifikátorů nemusí být pixel přiřazen žádné třídě (je mimo
nastavené hranice známých tříd či limity vzdálenosti nebo pravděpodobnosti). Vzniká
tematická mapa.

122
12.4.2 Neřízená klasifikace
Základem neřízené klasifikace je shluková analýza. Následně uživatel musí provést přiřazení
významu shlukům a reklasifikaci (spojení tříd).
Metoda nevyužívá trénovacích ploch. Vychází se z předpokladu, že pixely patřící jedné třídě
se přirozeně seskupí ve vícerozměrném prostoru. Na základě shlukovací analýzy jsou
vymezeny jednotlivé shluky a pixely zařazeny do jednotlivých shluků, tj. jednotlivých tzv.
spektrálních tříd. Následně se ze spektrálních tříd interpretací a spojování vytváří informační
třídy.
Obrázek 108 Přirozené shlukování hodnot pixelů podle pásem A a B (Dobrovolný, 2005)
Obrázek 109 Varianty metod shlukové analýzy (Dobrovolný, 1998)
Uplatňují se jak aglomerativní tak i rozkladové (divizivní) metody.

123
12.4.2.1 Metoda K-průměrů
Poměrně populární je metoda K-průměrů (K-means):
1) Definuje se K, tedy počet požadovaných shluků. Protože se dají snadno spektrální
třídy spojovat do informačních, ale opačně to nelze provést, volí se výrazně větší počet
shluků (a tedy spektrálních tříd), než je finální požadovaný počet informačních tříd.
2) Specifikuje se výchozí poloha středů shluků, pokud je znám takový odhad. Pokud
odhad není k dispozici, rozmístí se středy shluků rovnoměrně v prostoru.
3) Každý pixel je přiřazen k tomu shluku, k jehož středu má nejblíže.
4) Z polohy všech pixelů, zařazených do daného shluku, se vypočte poloha nového
středu shluku (provede se pro všechny shluky)
5) Kontroluje se, zda došlo ke splnění kritérií konvergence (nedochází k výrazné změně
zařazení pixelů nebo polohy středů shluků se již nemění), pokud ano, klasifikace se
ukončí, pokud ne, vrací se řešení k bodu 3
Tím jsou určeny spektrální třídy a následuje proces vytváření informačních tříd.
12.4.2.2 Metoda ISODATA
1) Definuje se počet shluků, maximální směrodatná odchylka pro heterogenitu shluku
a maximální počet iterací
2) Specifikuje se výchozí poloha středů shluků, pokud je znám takový odhad. Pokud
odhad není k dispozici, rozmístí se středy shluků rovnoměrně v prostoru.
3) Každý pixel je přiřazen k tomu shluku, k jehož středu má nejblíže.
4) Kontrola nového uskupení shluků:
shluk, který se stane heterogenním (podle násobku směrodatné odchylky), je
rozdělen na 2
shluky, které jsou svými středy blíže než je zadaná hodnota, jsou spojeny
shluky s podlimitním počtem pixelů jsou zrušeny
5) nová iterace od kroku 3 nebo ukončení při naplnění kritérií
K dalším metodám patří AMOEBA nebo RGB clustering.
12.4.3 Hybridní klasifikace
Hybridní klasifikace spojuje řízenou a neřízenou klasifikaci. Nejvíce používané jsou varianty:
výsledky ze shlukové analýzy se použijí pro tréninkové stádium řízené klasifikace
data z tréninkových ploch použita pro vstup do neřízené klasifikace (např.
identifikace lineárních objektů).

124
12.4.4 Klasifikace neuronovou sítí
Využívá se zejména algoritmus se zpětným postupem (řízená klasifikace). Neuronová síť
mívá 2 vrstvy (Kohonenova a Grossbergova), které jsou trénovány odděleně. Kohonenova
vrstva je určena pro neřízenou klasifikaci na vstupu, Grossbergova vrstva pro řízenou
klasifikaci na výstupu.
Algoritmus s obráceným postupem využívá síť, která je tvořena pixely jako vstupními uzly.
Následuje rozdělení do shluků, postupná agregace až na tolik uzlů, kolik jich má požadovaný
výstup.
12.4.5 Odhad přesnosti klasifikace
Po provedené klasifikaci je nezbytné provést odhad přesnosti klasifikace.
Musí se vymezit testovací plochy, které jsou zásadně odlišné od trénovacích ploch. Na nich se
zjišťuje skutečná (správná) klasifikace daného území. Následně se posoudí mapovaná hodnota
klasifikace proti skutečné. Hodnocení se provádí v kontingenční tabulce.
Tabulka 12 Kontingenční tabulka pro hodnocení přesnosti klasifikace (Dobrovolný, 1998)
realita
map
ován
o
Jehličnatý Smíšený listnatý voda celkem Chyba
nadbytečnéh
o přijetí
Jehličnatý 24 0 0 3 27 0.11
Smíšený 3 36 16 0 55 0.35
listnatý 0 0 28 0 28 0
voda 2 0 0 14 16 0.12
celkem 29 36 44 17 126
chyba
vynechání
0.17 0 0.36 0.18 0.19
Chyby vynechání (omission) - vzorky dané kategorie byly mapovány jako jiná kategorie. Je
to chyba II.druhu.
Chyby nadbytečného přijetí (commision) - mapované vzorky byly ve skutečnosti něco
jiného. Je to chyba I.druhu.
Celková proporcionální chyba je 0.19 (19%).
Výsledky klasifikace se posuzují i pomocí Kappa index. Ten hodnotí provedenou klasifikaci
s klasifikací čistě náhodnou.
PO
POPP
1
kde PP je pozorovaná přesnost (z kontingenční tabulky, resp. chybové matice) a PO je
přesnost dosažitelná náhodným zařazením pixelů do jednotlivých tříd.

125
12.5 Postklasifikační úpravy
Po klasifikaci je ještě nutné provést úpravy. I přes správnou klasifikaci se některé objekty
zanedbávají, aby se získala jednodušší tematická mapa (např. ojedinělé stavby v lese), nebo
není zájem zachovat dočasné objekty v obraze (např. lodě na vodě, auta na silnici).
Vzhledem k izolovanosti těchto pixelů se označují jako šum typ pepř a sůl.
K tomu se používají nízkofrekvenční filtry, s logickým operátorem, modus, mediánový apod.
Pro eliminaci menších polygonů se používá Sievův filtr.
13 Radarová analýza
Radar využívá mikrovlnné záření, které je výhodné kvůli snadnému procházení atmosférou.
Za určitých podmínek penetruje i svrchní pokryv Země (suché sedimenty).
Při zpracování a interpretaci je třeba vycházet ze skutečnosti, že objekty vykazují odlišné
odrazové a vyzařovací vlastnosti v mikrovlnném spektru než v optickém. Ovlivňuje je
především drsnost povrchu a obsah vody (viz dále). Záznam přicházejícího radarového záření
je také odlišný, projevuje se jiná geometrie, vyskytují se jiné chyby, a proto se odlišuje
i způsob zpracování digitálních záznamů. Vzhled výsledných radarových záznamů má
výraznou texturu, často zrnitou (obr. 110), s řadou výrazných rozdílů na malé ploše (sůl
a pepř), což vyžaduje filtrace a pokročilou práci s texturou.
RADAR je zkratkou z angl. radio detecting and ranging. Běžně se používá zejména při
kontrole rychlosti vozidel tzv. Dopplerův radar. Pro monitoring srážek (resp. vodních částic
ve vzduchu) se používá meteorologický PPI radar. Pro DPZ mají však hlavní význam
následující typy radaru:
Radar s reálnou aperturou (Real Aperture Radar), zpravidla ve variantě SLAR (Side-
Looking Airborne Radar) – boční anténa vyšle signál, který se po odrazu od objektů
vrátí k anténě a tento signál je zpracován (obr. 111). Vzdálenost k objektu Ds je
vypočtena na základě zaznamenaného času mezi vysláním signálu a přijetím echa (2t)
a známé rychlosti šíření mikrovlnného záření v atmosféře (c). Jde ale o šikmou
vzdálenost, kterou je následně nutné přepočítat na horizontální vzdálenost.
2
tcDs
Radar se syntetickou aperturou (SAR, Synthetic Aperture Radar) – radar s fyzicky
krátkou anténou, která je modifikováním odraženého záznamu (s využitím letu nosiče)
a jeho zpracováním uměle syntetizována (chová se jako dlouhá anténa). Kromě toho
se využívá i Dopplerova posunu frekvencí ke zlepšení podélného rozlišení.
SRTM (Shuttle Radar Topography Mission) – mise raketoplánu Endeavour mezi 11.2.
a 22.2.2000, při které bylo z raketoplánu nasnímáno území v rozsahu 60o s.š. až 60
o
j.š. a následně vytvořen digitální model reliéfu terénu. K měření se použily 2 antény,
jedna v nákladovém prostoru a druhá na stožáru 60 m dlouhém (obr. 112).

126
Obrázek 110 Zrnitá textura radarového obrazu (Dobrovolný, 2005)
Obrázek 111 Princip práce bočního radaru – vyslání a přijetí mikrovlnného pulsu (a) a odpovídající záznam (b)
(Kolář et al., 1997)

127
Obrázek 112 Raketoplán Endeavour při misi SRTM (http://www.lethist.lautre.net/endeavour.htm)
13.1 Geometrické vlastnosti radarových obrazových záznamů
Základní geometrické vlastnosti vyplývají z geometrie snímání, která je vysvětlena na obr.
113. Rozlišuje se oblast blízkého dosahu A (near range) a oblast vzdáleného dosahu B (far
range). Z obrázku vyplývá význam úhlu pohledu α (look angle), hloubkového úhlu δ
(depression angle), úhlu dopadu θ (incidence angle), šikmá vzdálenost S (slant range),
horizontální vzdálenost D (ground range), šířka záběru Z (swath) (Dobrovolný, 1998).
Obrázek 113 Geometrické vlastnosti radarových obrazových záznamů (Dobrovolný, 1998)

128
13.1.1 Prostorové rozlišení bočního radaru
Při snímání bočním radarem dochází k postupnému záznamu jednotlivých řádek kolmých na
směr letu nosiče. Je potřebné definovat dvojí rozlišení – příčné a podélné (vzhledem k letu).
Příčné rozlišení kontroluje délka pulsu. Dva objekty lze odlišit, pokud je jejich šikmá
vzdálenost větší než ½ délky pulzu (obr. 114). Pro rozlišení na zemském povrchu
(horizontální) se musí přepočítat s pomocí depresního úhlu. Proto 2 stejně vzdálené body lze
rozlišit blízko letadla, ale ne ve větší vzdálenosti (srovnej rozlišitelnost bodů 1, 2 a 3, 4 na
obr. 114).
Obrázek 114 Vysvětlení příčného rozlišení (Dobrovolný, 2005)
Podélné rozlišení (azimutální) Ra kontroluje délka antény. Závisí na šířce vyslaného paprsku
a na horizontální vzdálenosti L mezi osou letu a polohou objektu.
Ra=L*β
kde L je vzdálenost od osy letu na Zemi a β úhlová šířka paprsku.
13.2 Geometrické charakteristiky radarových snímků
Výrazně se projevují změny měřítka v příčném směru. Poloha objektů je měřena u bočního
radaru v šikmých vzdálenostech. Při přepočtu na horizontální vzdálenosti dochází
k relativním změnám vzdáleností, což vede ke změnám měřítka (obr. 115). Symboly A, B a C
reprezentují stejně velké objekty, které jsou stejně (horizontálně) vzdálené. Pokud použijeme
šikmé vzdálenosti, rozměr i vzdálenost objektů se nestejně změní, což je dokladem změny
příčného měřítka. Tyto změny měřítka mohou být eliminovány pomocí hyperbolické korekce
(Dobrovolný, 1998).

129
Obrázek 115 Rozdíly v záznamu radarového echa v šikmých a horizontálních vzdálenostech (Dobrovolný, 1998)
K dalším chybám patří poziční chyby v poloze objektů (relativní přemístění, opačné proti
logice obrazového záznamu), zhuštění signálu (projeví se u svahu orientovaného napříč linie
letu a po zpracování může být délka svahu výrazně zkrácena) (obr. 116), radarový stín (za
objekty nedochází k žádnému odrazu, vzniká zcela mrtvý prostor).
Obrázek 116 Zhuštění signálu radaru na přivráceném svahu (Dobrovolný, 2005)
13.3 Parametry ovlivňující vzhled radarových snímků
Odražený radarový signál nese důležité informace o sledovaném objektu. Charakteristiky
signálu lze rozdělit na vnější a vnitřní (systémové).
Vnější parametry:

130
vlnová délka použitého záření (obr. 117)
polarizace (obr. 118) – zejména u rozlišení vegetace
úhel dopadu – malý úhel dopadu způsobuje silný odraz od hladkých povrchů, naopak
velký úhel dopadu zdůrazní tvary reliéfu (i malé výškové rozdíly).
azimut (orientace dopadajícího radarového paprsku vzhledem k orientaci sledovaného
objektu) – objekty kolmo na směr paprsku dávají silnější signál (vlny na moři, brázdy
na poli apod.).
Obrázek 117 Používaná pásma mikrovlnného záření a příklad obrazu získaného z příslušného pásma (Dobrovolný,
2005)
Vnitřní parametry:
drsnost povrchu – drsné povrchy poskytují difúzní odraz, hladké povrchy zrcadlový
odraz (extrémním případem jsou koutové odražeče, které koncentrují odraz v místě
instalace a slouží jako polohové referenční body, několikanásobný odraz uvnitř
vegetace apod.
lokální úhel dopadu,
topografie,
vlhkostní poměry – zvýšená vlhkost sedimentů brání pronikání signálu do hloubky
dielektrické vlastnosti – vysoké hodnoty odrazu u kovových předmětů, vyšší obsah
vody zvyšuje odraz

131
Obrázek 118 Vliv polarizace (HH, VV, HV) radarového signálu na výsledný obraz (Dobrovolný, 2005)
13.4 Radarový signál vegetace
Pro detekci vegetace jsou vhodné vlnové délky 2 - 6 cm. Používá se polarizované záření,
protože vegetace způsobí změnu polarizace. Výsledek ovlivňuje hustota vegetace, obsah
vody, orientace skupiny (azimut).
13.5 Radarový signál kapalné vody
Hladké a čisté vodní plochy mají velmi vysoký odraz mikrovlnného záření. Vzhledem
k bočnímu uspořádání se však odrazí mimo anténu nosiče, a proto je výsledkem záznamu
černá plocha bez signálu. Znečištění vody (zejména ropné skvrny) se na radarovém odrazu
výrazně projeví. Rovněž vlny s výškou přes 1 m se dobře ukážou při použití delších vlnových
délek.
13.6 Radarový signál sněhu a ledu
Výsledek závisí na stáří, skladbě, nerovnostech terénu, teplotě atd. Pro zkoumání ledu se
doporučují pásma X a L (Dobrovolný, 1998).
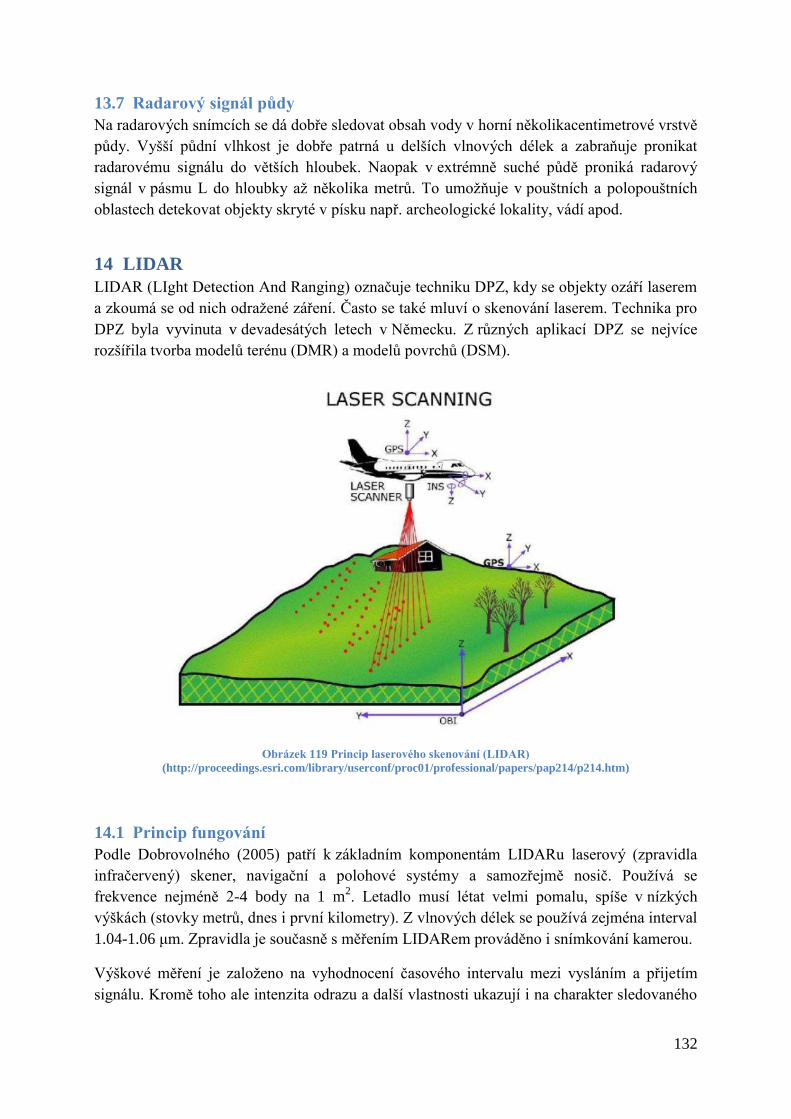
132
13.7 Radarový signál půdy
Na radarových snímcích se dá dobře sledovat obsah vody v horní několikacentimetrové vrstvě
půdy. Vyšší půdní vlhkost je dobře patrná u delších vlnových délek a zabraňuje pronikat
radarovému signálu do větších hloubek. Naopak v extrémně suché půdě proniká radarový
signál v pásmu L do hloubky až několika metrů. To umožňuje v pouštních a polopouštních
oblastech detekovat objekty skryté v písku např. archeologické lokality, vádí apod.
14 LIDAR
LIDAR (LIght Detection And Ranging) označuje techniku DPZ, kdy se objekty ozáří laserem
a zkoumá se od nich odražené záření. Často se také mluví o skenování laserem. Technika pro
DPZ byla vyvinuta v devadesátých letech v Německu. Z různých aplikací DPZ se nejvíce
rozšířila tvorba modelů terénu (DMR) a modelů povrchů (DSM).
Obrázek 119 Princip laserového skenování (LIDAR)
(http://proceedings.esri.com/library/userconf/proc01/professional/papers/pap214/p214.htm)
14.1 Princip fungování
Podle Dobrovolného (2005) patří k základním komponentám LIDARu laserový (zpravidla
infračervený) skener, navigační a polohové systémy a samozřejmě nosič. Používá se
frekvence nejméně 2-4 body na 1 m2. Letadlo musí létat velmi pomalu, spíše v nízkých
výškách (stovky metrů, dnes i první kilometry). Z vlnových délek se používá zejména interval
1.04-1.06 μm. Zpravidla je současně s měřením LIDARem prováděno i snímkování kamerou.
Výškové měření je založeno na vyhodnocení časového intervalu mezi vysláním a přijetím
signálu. Kromě toho ale intenzita odrazu a další vlastnosti ukazují i na charakter sledovaného

133
objektu. U vegetačního krytu se signál odráží několikrát – nejen od horní části koruny, ale
i od dalších pater vegetace a samozřejmě i od země, tedy terénu pod vegetací. Z více odrazů
lze konstruovat DMR, DSM i model výšky lesního porostu.
14.2 Aplikace
Výjimečným projektem (doufejme dlouhodobým) je mapování ČR lidarem (LLS). Začátek
byl 15.10.2009, konec snímání 2014. Výšková chyba se udává cca 18 cm až 0,5m. Celkově
stál projekt 95 mil. (na financování se podílel ČUZK, AČR a podniky povodí).
Výška letu nad terénem byla 1200 – 1500 m. Průměrný překryt sousedních skenovacích pásů
byl 40 – 50 %, čímž je dosažena hustota bodů minimálně 1bod/m2.
Po zpracování dat vzniknou tyto 3 realizační produkty:
Digitální model reliéfu území České republiky 4. generace (DMR 4G) - v síti 5 x 5
m s úplnou střední chybou výšky 0,3 m v odkrytém terénu a 1 m v zalesněném
terénu. Je k dispozici od konce roku 2012.
Digitální model reliéfu území České republiky 5. generace (DMR 5G) - TIN
s úplnou střední chybou výšky 0,18 m v odkrytém terénu a 0,3 m v zalesněném
terénu. Plánované dokončení je v roce 2015.
Digitální model povrchu území České republiky 1. generace (DMP 1G) - TIN
s úplnou střední chybou výšky 0,4 m pro přesně vymezené objekty (budovy) a 0,7
m pro objekty přesně neohraničené (lesy a další prvky rostlinného půdního krytu).
Plánované dokončení je v roce 2015.
15 Typické aplikace DPZ
Mezi typické aplikace DPZ řadíme:
Topografické mapy (mapování), DMT
Ochrana životního prostředí
Správa a využití přírodních zdrojů:
o Zemědělství
o Lesnictví
o Vodohospodářství
o Rybolov
o Geologie a hornictví
Tvorba krajiny, urbanismus

134
Výzkum a sledování:
o atmosféry,
o geosféry,
o biosféry,
o hydrosféry (oceány, ledovce, ..)
Vojenství a bezpečnost
Krizové řízení
Komunikace
Archeologie
Pro jednotlivé typy dat podle prostorového rozlišení lze uvést typické aplikace (GISAT,
2013):
Data s nízkým a středním prostorovým rozlišením (cca 100 m a více)
globální a kontinentální mapování
sledování stavu a vývoje vegetace
modelování vývoje zemědělských plodin a předpovídání výnosů
monitorování rozsáhlých přírodních katastrof
sledování stavu a vývoje sněhového pokryvu a ledovců
sledování stavu a vývoje atmosféry a oceánů
Data s vysokým prostorovým rozlišením (cca 10 m)
regionální mapování (1:25000-1:100000)
mapování stavu, vývoje a změn v krajině (land cover/land use)
regionální plánování
monitorování rozvoje měst
sledování stavu a vývoje vegetace
mapování zemědělských ploch a klasifikace zemědělských plodin
sledování stavu lesních porostů a klasifikace lesních ekosystemů
sledování lesní těžby

135
geologické mapování
geomorfologické mapování
mapování důsledků přírodních katastrof
tvorba digitálního modelu terénu
Data s velmi vysokým prostorovým rozlišením (cca 1 m)
podrobné mapování
urbanistické studie
3D modely měst
precizní zemědělství
kontrola zemědělských aktivit
plánování a projektování liniových staveb
mapování dopravních sítí
inventarizace lesních porostů
mapování rozptýlené vegetace
monitorování povrchových dolů, skládek a rekultivace
mapování půdní eroze
plánování a organizace humanitární pomoci
pojišťovnictví
tvorba digitálního modelu terénu

136
Seznam literatury
Clevers, J: Overview RS-Basics Digital Lectures. Wageningen, 1999. On-line:
http://www.geo-informatie.nl/courses/grs20306/lectures/overview.htm
Dobrovolný P.: Dálkový průzkum Země. Digitální zpracování obrazu. Skripta PřF MU Brno,
1998.
Dobrovolný, P.: Digitální zpracování materiálů DPZ. Série PPT. Brno, 2005.
Farský, I., Matějček, T.: Vybrané kapitoly z fyzické geografie. Ústí nad Labem: Univerzita J.
E. Purkyně, 2008. 119 s. ISBN 978-80-7044-996-7.
GISAT: Dodávaná data. On-line: http://www.gisat.cz/content/cz/druzicova-data/dodavana-
data. Citováno 20.4.2013.
Halounová L., Pavelka K.: Dálkový průzkum Země. Skripta ČVUT Praha, 2005, 192 stran.
Kalus, R.: Trivium z optiky. Skripta PřF Ostravská univerzita. 2004.
Kumpera, O., Müller, K., Foldyna, J.: Interpretace geologických struktur. Skripta VŠB
Ostrava, 1986.
Kolář J., Halounová L., Pavelka K.: Dálkový průzkum Země. Skripta ČVUT Praha, 1997, 164
stran
Kolář J.: Dálkový průzkum Země. SNTL 1990.
Lillesand T., Kiefer R.: Remote sensing and image interpretation. John Wiley & Sons, 1994.
Lillesand T., Kiefer R., Chipman J.: Remote sensing and image interpretation. John Wiley &
Sons, 2008, 756 stran.
Meer Mohr, H. van der: Camera and multispectral scanning systems in remote sensing as
applied to geology. Part I: Data collection. Skripta. Enschede, 1992.
Mikulčák J., Krkavec L., Klimeš B., Bartůněk, J., Široký J., Pauková M.: Matematické,
fyzikální, chemické tabulky. Praha: SPN, 1970
NRC (no datum): Fundamentals of Remote Sensing. Natural Resources Canada. On-line:
http://www.nrcan.gc.ca/earth-sciences/geography-boundary/remote-
sensing/fundamentals/1430
Pavelka K.: Zpracování obrazových záznamů DPZ. Skripta ČVUT Praha, 1999, 138 stran
Řeřicha J.: Dálkový průzkum Země. ŠKOLA GEOinfo č. 3, 5, 6/98.
Žíhlavník, Š., 1992: Využitie diaľkového prieskumu Zeme pri lesníckom mapovaní. Vedecké
a pedagogické aktuality – 5/1992, TU Zvolen, 53 stran

137
Odkazy
Český hydrometeorologický ústav http://www.chmi.cz
Canada Centre for Remote Sensing http://www.imagecentre.com/tutorial/indexe.html
University of South Carolina http://www.cla.sc.edu/geog/rslab/rsccnew/rscc-no-frames.html
NASA http://rst.gsfc.nasa.gov/

Autor Doc. Dr. Ing. Jiří Horák
Název Dálkový průzkum Země
Vydavatel VŠB-TU Ostrava
Rozsah 137 stran
Rok 2014
Copyright © Jiří Horák, 2014
Zdroj financování Financováno z projektu CZ.1.07/2.2.00/28.0308 Inovace bakalářských a
magisterských studijních oborů na Hornicko-geologické fakultě VŠB-
TUO, spolufinancovaného Evropským sociálním fondem a státním
rozpočtem České republiky