cv of biorobotics - retis labretis.sssup.it/~giorgio/sites/phd-engineering/slides/biorobotics.pdfcv...
TRANSCRIPT

CV of
BioRoboticsArianna Menciassi
Christian Cipriani
PhD Presentation, Nov. 9 2011, Pisa
The BioRobotics Institute
Pontedera, 20 km
from Pisa, 15
minutes by train

People: 158
2 Full Professors
3 + 1 Associate Professors
2 Assistant Professors (one tenured)
6 Administrative Assistants (5 permanent)7 Technical Assistants (6 permanent)
28 Research assistants
40 Post Docs research assistants
69 PhD Students

The BioRobotics Institute of the Scuola Superiore S ant’Anna
EDUCATION RESEARCH TECHNOLOGY TRANSFER
MAIN AREAS and AREA LEADERS
� Humanoid Robotics (Paolo DARIO)
� Neuro-Robotics (Maria Chiara CARROZZA)
� Biomedical Signal Processing (Angelo Maria SABATINI)
� Surgical Robotics (Arianna MENCIASSI)
� Soft Robotics (Cecilia LASCHI)
� Neural Engineering (Silvestro MICERA)
� Creative Design (Cesare STEFANINI)
�Future and Emerging BioRobotics (Paolo DARIO)

Humanoid Robotics(Paolo Dario)
SABIAN WABIAN
Locomotion in Humanoid Robotics
• SABIAN (Sant’Anna BIped humANoid) robotic
Platform: Italian copy of WABIAN (WAseda
BIped humANoid).
• Current Research:
� New Hardware & Software systems
development necessary to the Sabian
locomotion;
� New Methods to improve the stability
of the platform.
The synergy between neuroscientific and
robotics research fields
The mutual exchange aims to validate
biological theories and to discover new bio -
inspired technologies.
In particular, the research field focuses on
the implementation of:
•Neuroscientific models for gaze control
•Sensory motor anticipation architectures
•Visual control algorithms for locomotive
navigation

Neuro-Robotics AreaResponsible: prof. Maria Chiara Carrozza
Is “physical” human-robot symbiosis doable?In 1960s, in Man-Computer symbiosis , J.C.R. Licklider formulated a vision of human-computer
symbiosis in which computers and humans would become fluidly interdependent and share goals
In 2010s, in many tasks, human and computer share goals and are interdependent
� Robotic hand able to perform dexterous actions and sense objects
� Suitable interfaces for controlling perception and actions
� Sense of body ownership for amputees
� Wearable active orthoses for assistance and rehabilitation
� Non-invasive human-machine interfaces
� Wearable sensors
� Upper-limb robot assisted rehabilitation
� Locomotion robot-assisted rehabilitation
� Respiratory tele-rehabilitation and tele-monitoring
� Biomimetic fingertip and roughness discrimination
� Neuro-inspired processing
� Zero-power tactile sensing
Dexterous hand prosthesis
Artificial sense of touch
Wearable assistive machines
Rehabilitation
robotics and tele-
rehabilitation

Area:
Biomedical Signal Processing (M.A. Sabatini)
The research activity concerns the development of wearable sensor
systems for ambulatory human movement monitoring
Activity 1
Design, fabrication and testing of wireless inertial and
magnetic measurement units (WiiMU)
Activity 2
State and parameter estimation techniques for processing data from
WiiMU-based wearable sensor systems
A2-1 Adaptive Extended Kalman Filtering algorithms for pose estimation of rigid bodies in highly
perturbed magnetic environments
A2-2 Hybrid generative/discriminative algorithms for classification of physical
activities, energy expenditure estimation, detection of incipient falls, and
Hidden Markov Models for real-time gait segmentation from in-foot sensors
WiiMU

� Why focusing on surgical robotics: - novel and advanced solutions for early diagnosis are available, BUT we have to cover the gap between diagnosis and therapy by developing systems for minimally invasive interventions- robotics can contribute dramatically by adding precision to interventions, standardizing procedures, reaching the microscale
� Districts: Endoscopy and therapy of the digestive tract, abdominaland thoracic surgery, vascular interventions
Research Area of Surgical RoboticsResearch Area of Surgical Robotics
- components
� Working at the level of- systems
ARAKNES project
Micro-VAST project
Vector project
SensorART project
… and experiments
� With a blend between - theory …
Arianna
Menciassi
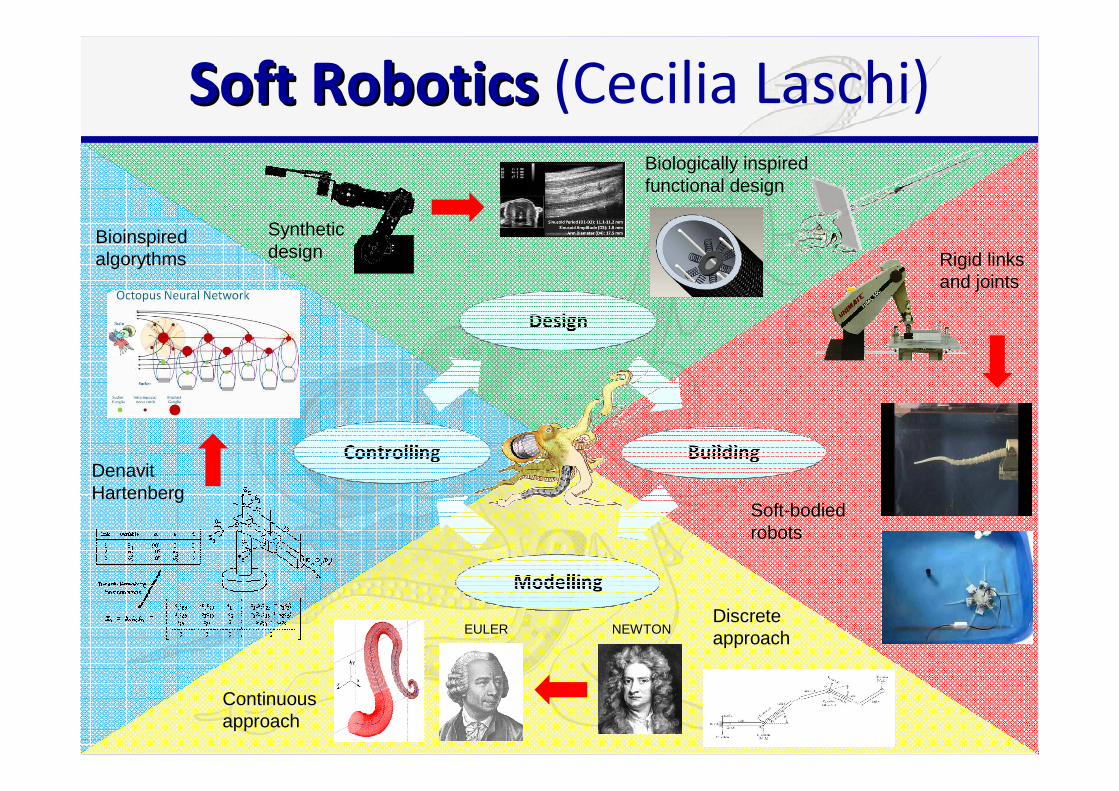
Soft Robotics Soft Robotics (Cecilia Laschi)
DenavitHartenberg
Bioinspiredalgorythms
Synthetic design
Biologically inspired functional design
Rigid linksand joints
Discrete approach
Continuous approach
EULER NEWTON
Soft-bodied robots

Neural Engineering (NeuENG) Area
(Neural Interfaces and Neural Prostheses)
Cybernetic hand prosthesis (TIME, MERIDIAN, NEMESIS Proj.)
Vestibular neuroprosthesis (CLONS EU Project) Spinal neuroprosthesis
(NeuWalk Project)
Responsible:Dr. S. Micera
Actuated intraneural electrodes
Self-opening intraneural electrodes

Creative Design AreaInventing in engineering
Cesare Stefanini

Research Activities
Future and Emerging
Robotics - Paolo Dario

The BioRobotics Institute of the Scuola Superiore S ant’Anna
EDUCATION RESEARCH TECHNOLOGY TRANSFER
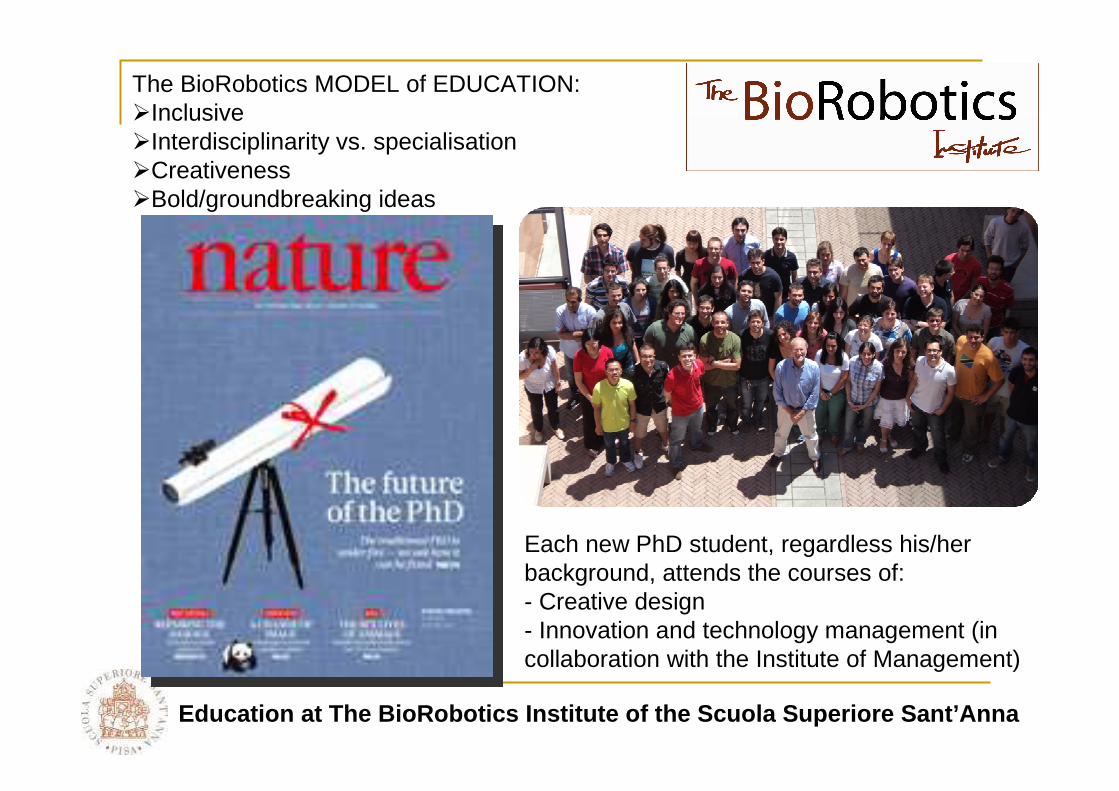
Education at The BioRobotics Institute of the Scuol a Superiore Sant’Anna
The BioRobotics MODEL of EDUCATION:�Inclusive�Interdisciplinarity vs. specialisation�Creativeness�Bold/groundbreaking ideas
Each new PhD student, regardless his/her background, attends the courses of:- Creative design- Innovation and technology management (in collaboration with the Institute of Management)

Skills and tools for entrepreneurship and
technology managementPiccaluga – Di Minin 3-6
http://www.mbr.iit.it

Abstract: The course objective is to provide students with the basic knowledge of micro-and nano-technologies for biomedical applications. In fact, micro- and nano-systems for biomedical applications represent a very effective alternative to traditional therapy and surgery techniques. The course will study the different technologies and solutions for medicine with a system approach, by investigating the micro- and nano-devices as mechatronic systems.
Program: •Definitions: micro- and nano-robotics, nanotechnology, NEMS•Basic micro- and nano-fabrication technologies•Scaling laws from micro- to nano-phenomena•Examples of nano sensors and nano actuators•Nanotechnologies for bio/not-bio interface studies (e.g. for basic neuroscience and for investigating cell adhesion)•Nanotechnologies for diagnosis and therapy: 1) cell ablation; 2) drug delivery; 3) imaging; 4) gene therapy.
Final exam:
Previous examinations:One day or half day workshop with the analysis of a paper on topics related to the program – 15 minutes of presentation (in English), 5 minutes of Q&A.Approximately 20 minutes x 12 students = 240 minutes = at least 4 hours.
Current examination: written test (most likely)When: Second half of May – beginning of June
Basic Program

The BioRobotics Institute of the Scuola Superiore S ant’Anna
EDUCATION RESEARCHTECHNOLOGY
TRANSFER

Continental, Fauglia
LION Shoes, San Miniato
fibres
Optical mirror
sensorsProgramming
bus
fibres
Optical mirror
sensorsProgramming
bus
Toyota Motor Corporation

Thank you!
Paolo Dario, Direttore
Istituto di BioRobotica, Scuola Superiore Sant'Anna
Polo Sant'Anna Valdera
viale Rinaldo Piaggio 34, Pontedera (Pisa)