csci 2720 data structures - computer...
TRANSCRIPT
CSCI 2720 Data Structures
Department of Computer ScienceUniversity of Georgia
Athens, GA 30602
Instructor: Liming Caiwww.cs.uga.edu/∼cai
0
A Tentative Schedule
Chapter 1. Introduction (1 week)Chapter 2. Algorithm analysis (0.5 weeks)∗
Chapter 3. Lists (1 week)Chapter 4. Trees (1 week)Chapter 5. Arrays and strings (1 week)Chapter 6. Implementation of Sets (1 week)Chapter 7. Dynamic dictionaries (2 weeks)Chapter 8. Sets of digital data (2 weeks)Chapter 9. Sets with special operations (1 week)Chapter 10. Memory management (1 week)Chapter 11. Sorting (2 weeks)
1

Chapter 1 Introduction
What is a data structure?
a double role: logic structure and physical representation.
example 1: a list L has two-fold meanings:(1) L = (a1, . . . , an), a set whose elements forming a linear relation;(2) how L is physically stored.
example 2: a tree T has two fold meanings:(1) a tree is a set whose elements forming a tree relation;(2) how T is stored.
2

The goals for data structure studies
Choosing a good data structure should
(1) facilitate algorithm design, programming, debugging, etc.[examples?]
(2) minimize the usage of computing resources. [examples?]
3

Von Neumann computer architecture
The concept of stored programs.
how is the following code executed?
example:......
x = y + 5;
A[x] = z*z - 80;
......
(1) compilation; (static memory allocation)
(2) loading;
(3) re-addressing (dynamic linking);
(4) run;
4
Abstract data types
An ADT consists of two portions:
(1) data type: a collection of objects;
(2) a collection of operations on the data type
example:ADT list L is an ordered set of elements,upon which operations such as Length(L) and Access(L, i) may bedefined.
** ADTs as basic building blocks for programming and interfacesbetween subprograms.
** ADTs do not provide explicit implementation details.
5

Mathematical background
(1) the growth of functions, the big-O notation
(2) logarithms and exponentials
(3) recurrence relations
example: Fibonacci sequenceF (n) = F (n− 1) + F (n− 2)F (1) = 1F (2) = 1Different algorithms:(1) recursive, recurrence for time complexity(2) recursive + memorizing results(3) iterative
(4) solve recurrences
expanding simple recurrence
6

Analysis of Insertion Sort
INSERTION-SORT(A)
1 for j <-- 2 to length[A]
2 do key <-- A[j]
3 /* Insert A[j] into sorted A[1..j-1] */
4 i=j-1
5 while i>0 and A[i] >key
6 do A[i+1] <-- A[i]
7 i=i-1
8 A[i+1] <-- key
Assume tj to be the number of times while is executed for every j.
T (n) = c1n+ c2(n− 1) + c4(n− 1) + c5n∑
j=2
tj + c6n∑
j=2
(tj − 1) +
c7n∑
j=2
(tj − 1) + c8(n− 1)
7

Then for some a, b, c,
T (n) ≤ an∑
j=2
tj + bn+ c — (1)
and for some d, ef ,
T (n) ≥ dn∑
j=2
tj + en+ f — (2)
The best case is when the list is already sorted: tj = 1The worst case is when the list is reversally sorted: tj = j
So we have to use tj = j. We haveT (n) ≤ xn2 + yn+ z for some x, y, z, where x > 0 — (3)
denoted as T (n) = O(n2)T (n) ≥ un2 + vn+ w for some u, v, w, where u > 0 — (4)
denoted as T (n) = Ω(n2)
Concluded: T (n) = θ(n2).
8

Complexity issues
size of the input: n, the number of bits used to encode the input.
For some problems, we may use different definitions of the inputsize.
running time of an algorithm: t(n), the number of primitiveoperations executed, defined as a function in the input size n.
worst-case running time: the upper bound on running time forany input.
average-case running time: the running time ”on average” orrunning time on a randomly chosen input assuming all inputs of agiven size (n) are equally likely.
order of growth: e.g., an2 + bn+ c, the growth rate depends onan2 as n grows if a > 0.
9
Pseudocode conventions
(1) indentation for block structure;
(2) ← for assignment, multiple assignments: x← y ← z is same asy ← z and then x← y;
(3) only local variables are allowed;
(4) A[i..j] is the subarrray of elements A[i],...A[j];
(5) call-by-value in parameter passing.
10
Analyzing algorithms
(1) random-access machine (RAM)
(2) primitive operations: add, substract, floor, ceiling, multiply,jump, memory movement, etc. difference: a constant multiplicativefactor.
(3) speed between different machines: a constant multiplicativefactor.
(4) Turing machine model, the O(log n) factor.
11

There are some divide-and-conquer approaches for Sorting Problem.
e.g., ”splitting a list into two of equal size” leads to Merge-Sortalgorithm
MERGE-SORT(A, p, r)
1 if p<r
2 then q <--(p+r)/2
3 MERGE-SORT(A, p, q)
4 MERGE-SORT(A, q+1, r)
5 MERGE(A, p, q, r)
12

Analysis of Merge-Sort
n = r − p+ 1, assume that n is a power of 2.
(1) time for divide: c1 for split the list into two sublists;
(2) time for conquer: 2T (n/2) for recursively solve subproblems
(3) time for combine: c2n for merging two length n/2 sortedsublists;
Recurrence:
T (n) = 2T (n/2) + c2n+ c1 when n > 1
T (n) = 0 when n = 1
How to solve the recurrence?
13

T (n) = 2T (n/2) + c2n+ c1
2T (n/2) = 22T (n/22) + 2c2n/2 + 2c1
22t(N/22) = 23T (n/23) + 22c2/22 + 22c1
· · ·
2kT (n/2k) = 2k+1T (n/2k+1) + 2kc2n/2k + 2kc1
Let n/2k+1 = 1 then k + 1 = log2 n
Then T (n) = 2k+1T (1) + (k + 1)c2n+ c1k∑
i=0
2i
T (n) = 0 + c2n log2 n+ c1(2k+1 − 1) = c2n log2 n+ c1(n− 1)
14

How fast does T (n) grow?
When n is big enough, there is a constant a > 0 such that
T (n) ≤ an log2 n.
T (n) cannot grow faster than an log2 n for some constant a > 0.
Apparently, there is a constant b > 0 such that
T (n) ≥ bn log2 n
T (n) grows faster than bn log2 n when n is large enough.
15

Growth of functions
Asymptotic notation
O(g(n)) = f(n) : ∃c > 0, n0 > 0 such that0 ≤ f(n) ≤ cg(n), for all n ≥ n0
Ω(g(n)) = f(n) : ∃c > 0, n0 > 0 such that0 ≤ cg(n) ≤ f(n), for all n ≥ n0
Θ(g(n)) = f(n) : ∃c1 > 0, c2 > 0, n0 > 0 such thatc1g(n) ≤ f(n) ≤ c2g(n), for all n ≥ n0
16

other notations and functions
floors and ceilingsmodular arthmeticpolynomialsexponentialslogarithmsStirling’s approximation n! =
√2πn(n/e)n(1 + Θ(1/n))
Fibonacci numbers:
17

Techniques to solve recurrences
1. substitution method – guess and use math induction
example: T (n) = 32T ( 2n
3 ) + n
T (1) = 6 for n = 1
We would like to find out if T (n) = O(n log n)
Guess: T (n) ≤ cn log n, for constant c to be determined later.
Verify:
(1) base case: T (1) = 6 ≤ 0 does not work.Adjust the guess: T (n) ≤ cn log n+ 6
(2) assume: T ( 2k3 ) ≤ c 2k
3 log 2k3 + 6
18

(3) induction:
T (k) = 32T ( 2k
3 ) + k
≤ 32 (c 2k
3 log 2k3 + 6) + k
= ck log 2k3 + 9 + k
= ck(log k − log 3/2) + 9 + k
= ck log k + k − ck(log 3/2) + 3 + 6= ck log k + k[1− c(log 3/2) + 3/k] + 6≤ ck log k + 6
when 1− c(log 3/2) + 3/k < 0 which can hold by choosing c = 4and k > 3.
So we have shown that
T (n) ≤ 4n log n+ 6 when n > n0 = 3. That is
T (n) = O(n log n)
19

Can you use the substitution method to show T (n) = Ω(n log n)?
which part of the proof for T (n) = O(n log n) needs to be changed?
20

2. changing variables
example: T (n) = 2T (√n) + log2 n
define m = log2 n, i.e., n = 2m
then T (2m) = 2T (2m/2) +m
rename the function: S(m) = T (2m)
S(m) = 2S(m/2) +m
solve it, we have S(m) = O(m logm)
so T (n) = T (2m) = O(m logm) = O(log n log log n).
21

3. recursive tree method
also based on unfolding the recurrence to make a recursive-tree.
(1) T (n) is a tree with non-recursive terms as the root andrecursive terms as its children.
(2) for each child, replace it with then non-recursive terms andproducing children that are then recursive terms
(3) repeat (2), expand the tree until all children are the base case.
22
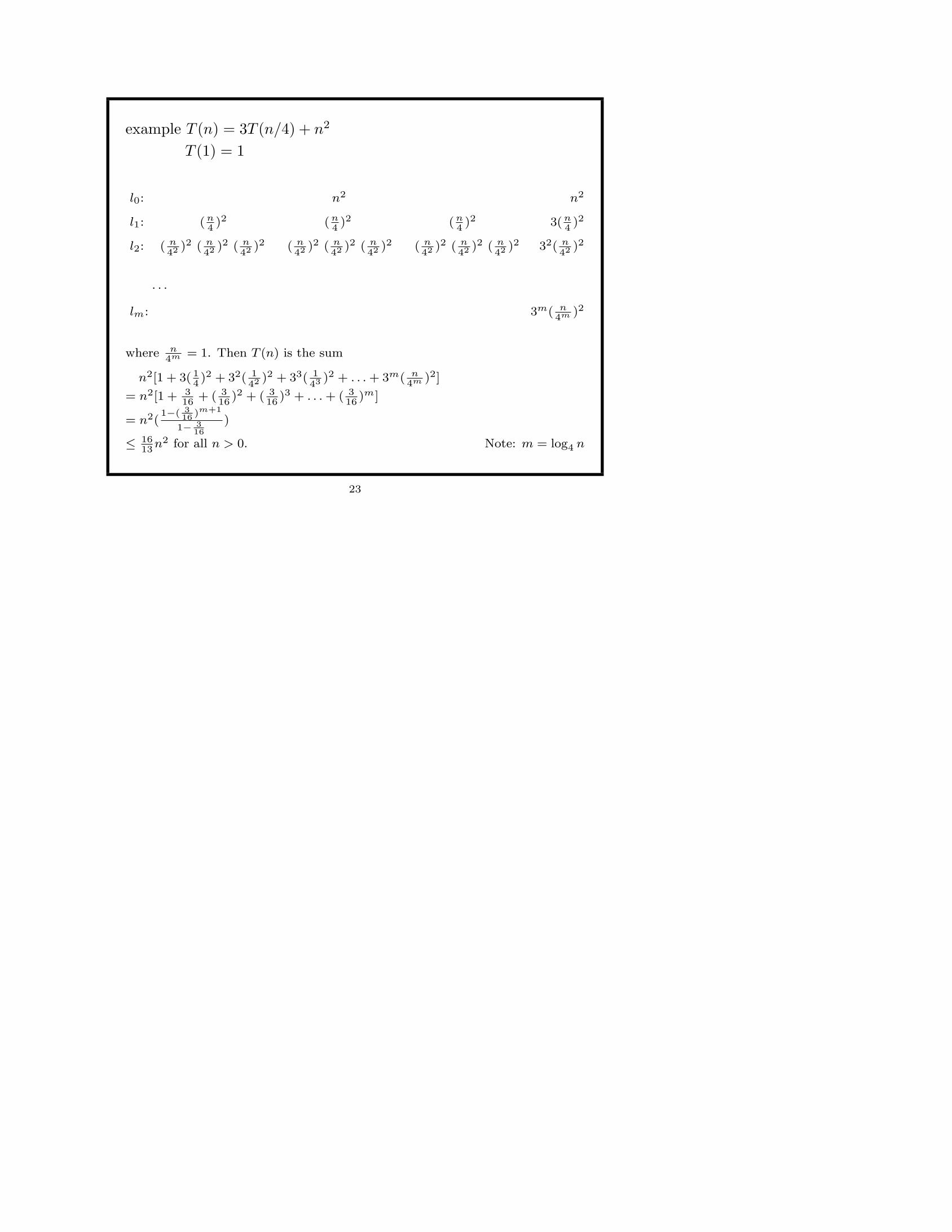
example T (n) = 3T (n/4) + n2
T (1) = 1
l0: n2 n2
l1: (n4)2 (n
4)2 (n
4)2 3(n
4)2
l2: ( n42 )2 ( n
42 )2 ( n42 )2 ( n
42 )2 ( n42 )2 ( n
42 )2 ( n42 )2 ( n
42 )2 ( n42 )2 32( n
42 )2
· · ·
lm: 3m( n4m )2
where n4m = 1. Then T (n) is the sum
n2[1 + 3( 14)2 + 32( 1
42 )2 + 33( 143 )2 + . . . + 3m( n
4m )2]
= n2[1 + 316
+ ( 316
)2 + ( 316
)3 + . . . + ( 316
)m]
= n2(1−( 3
16 )m+1
1− 316
)
≤ 1613
n2 for all n > 0. Note: m = log4 n
23
Chapter 3. Lists
3.1. List and List Operations
A list L is an ordered sequence of elements L = 〈x0, x1, . . . , xn−1〉.
List operations:
• Access(L, i): return L[i];
• length(L): return |L|;
• Concat(L1, L2): return 〈x0, . . . , xn−1, y0, . . . , ym−1 ifL1 = 〈x0, x1, . . . , xn−1〉 and L2 = 〈y0, . . . , ym−1〉;
• MakeEmptyList(): return 〈〉;
• IsEmptyList(L): return true iff |L| = 0.
24

Special cases of lists:
stack: is a list.
• Top(L): return the last element of L;
• Pop(L): remove and return the last element of L;
• Push(x, L): Concat(L, 〈x〉);
• MakeEmptyStack();
• IsEmptyStack(L);
25

Special cases of lists:
queue: is a list.
• Enqueue(x, L): Concat(L, 〈x〉);
• Dequeue(L); remove and return the first element of L;
• Front(L): return the first element of L;
• MakeEmptyQueue(); return 〈〉;
• IsEmptyQueue(L);
26
3.2 Basic List Representations
(1) contiguous-memory representation: a list is stored in a table offixed size; logical adjacency is the same as physical adjacency.
stack, queue
(2) linked representation: list elements carry with them pointers toone or both logical neighbors.
stack, queue
27
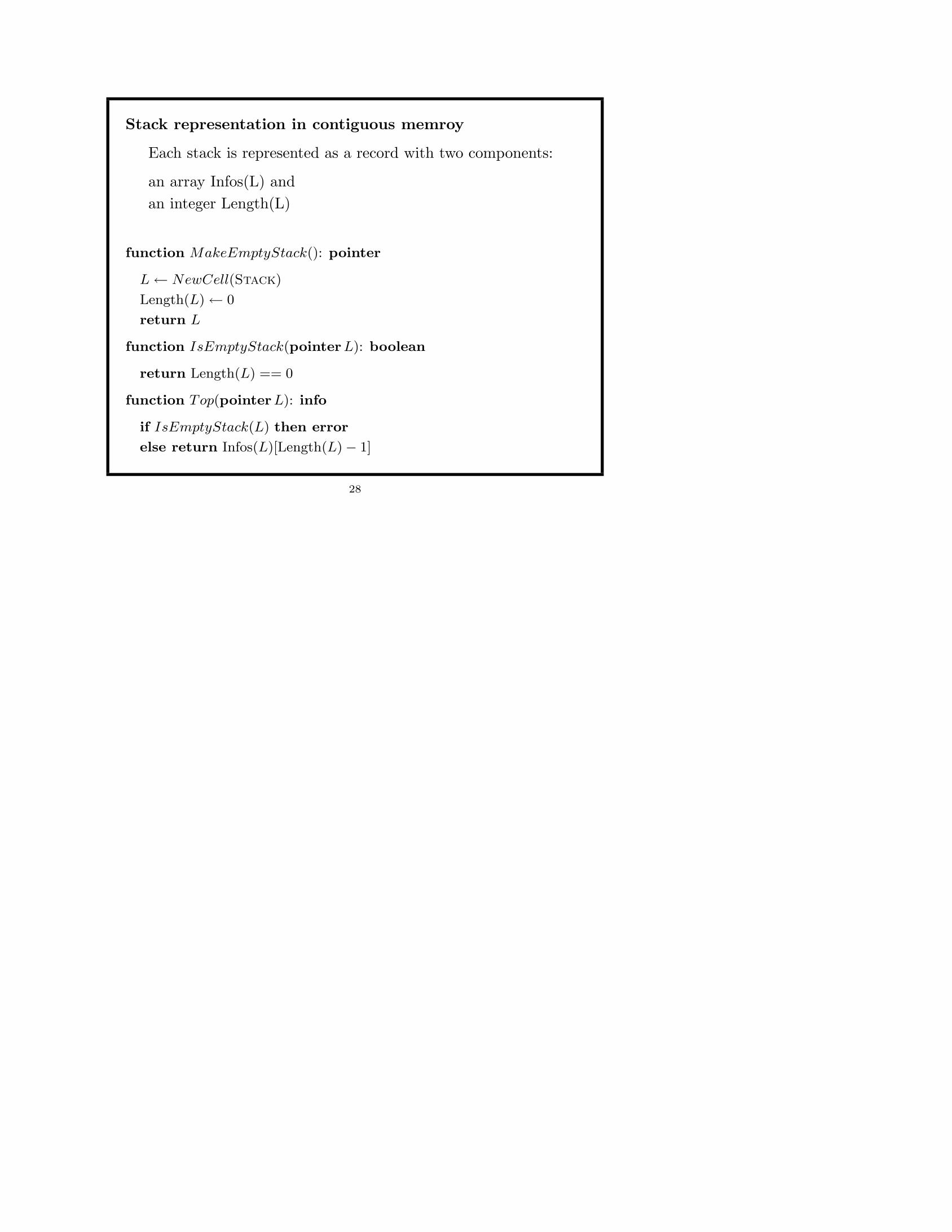
Stack representation in contiguous memroy
Each stack is represented as a record with two components:
an array Infos(L) andan integer Length(L)
function MakeEmptyStack(): pointer
L← NewCell(Stack)
Length(L)← 0
return L
function IsEmptyStack(pointerL): boolean
return Length(L) == 0
function Top(pointerL): info
if IsEmptyStack(L) then error
else return Infos(L)[Length(L)− 1]
28
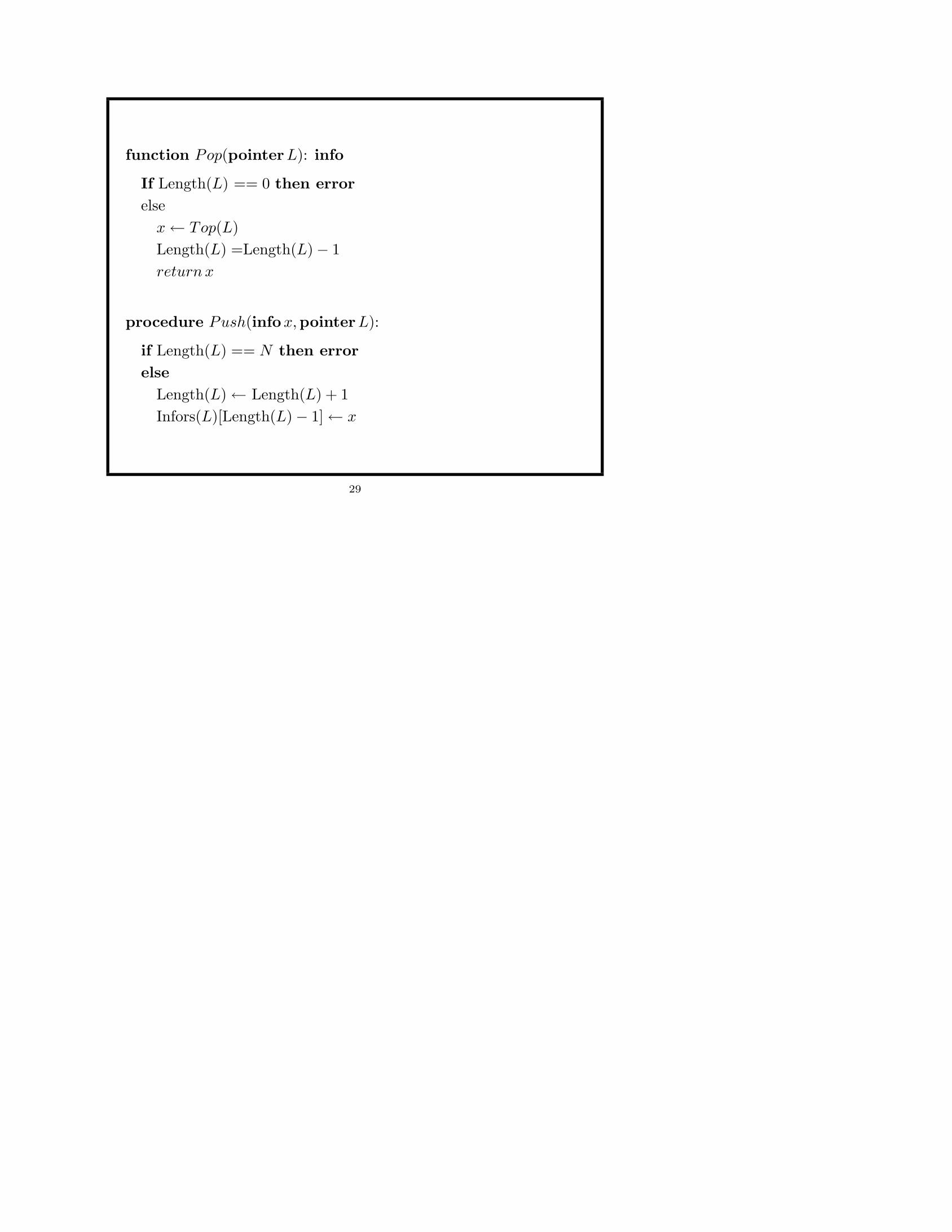
function Pop(pointerL): info
If Length(L) == 0 then errorelsex← Top(L)Length(L) =Length(L)− 1return x
procedure Push(infox,pointerL):
if Length(L) == N then errorelse
Length(L)← Length(L) + 1Infors(L)[Length(L)− 1]← x
29

Queue representation in contiguous memroy
Each queue is represented as a record with three components:
an array Infos(L)an integer Length(L) andan integer Front(L)
function MakeEmptyQueue(): pointer
L← NewCell(Queue)
Length(L)← 0
Front(L)← 0
return L
function IsEmptyQueue(pointerL): boolean
return Length(L) == 0
30
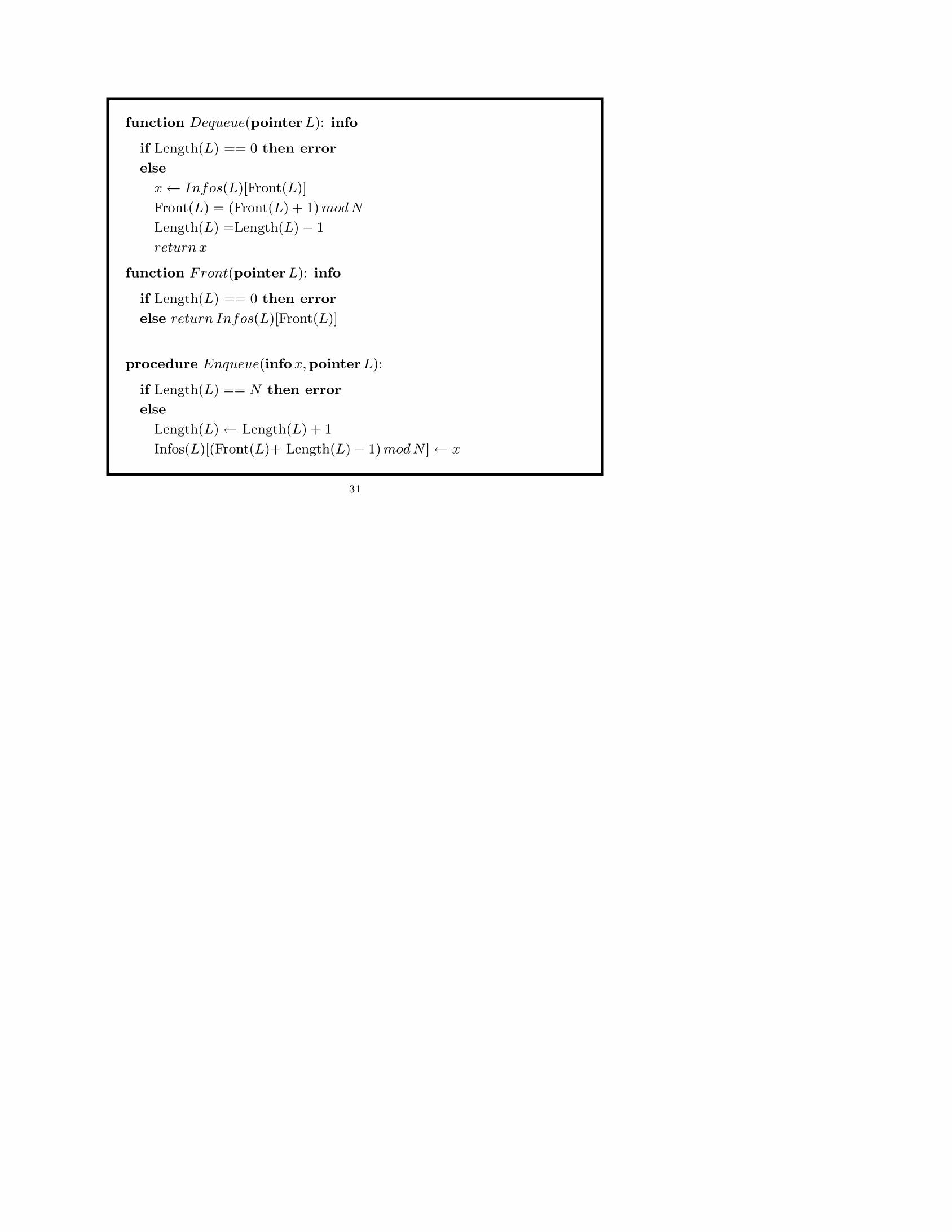
function Dequeue(pointerL): info
if Length(L) == 0 then error
else
x← Infos(L)[Front(L)]
Front(L) = (Front(L) + 1) mod N
Length(L) =Length(L)− 1
return x
function Front(pointerL): info
if Length(L) == 0 then error
else return Infos(L)[Front(L)]
procedure Enqueue(infox,pointerL):
if Length(L) == N then error
else
Length(L)← Length(L) + 1
Infos(L)[(Front(L)+ Length(L)− 1) mod N ]← x
31

Stack representation in linked memory
Each stack is represented as a linked list of nodes,each of which consists of two components:
an data Info andan pointer Next
function MakeEmptyStack() : pointer
return Λ
function IsEmptyStack(pointerL): boolean
return L == Λ
function Top(pointerL): info
if L == Λ then error
else return Info(L)
32

function Pop(pointerL): info
if L == Λ then errorelsex← Top(L)L← Next(L)return x
procedure Push(infox,pointerL):
P ← NewCell(Node)Info(P )← x
Next(P )← L
L← P
33

Queue representations in linked memory
Each queue is represented as a record of two fields:
Front and Back, pointing to linked list nodes
function MakeEmptyQueue(): pointer
L← NewCell(Queue)
Front(L) ← Λ
Back(L) ← Λ
return L
function IsEmptyQueue(pointerL): boolean
return Front(L) == Λ
function Front(pointerL): info
if IsEmptyQueue(L) then error
else return Info(Front(L))
34
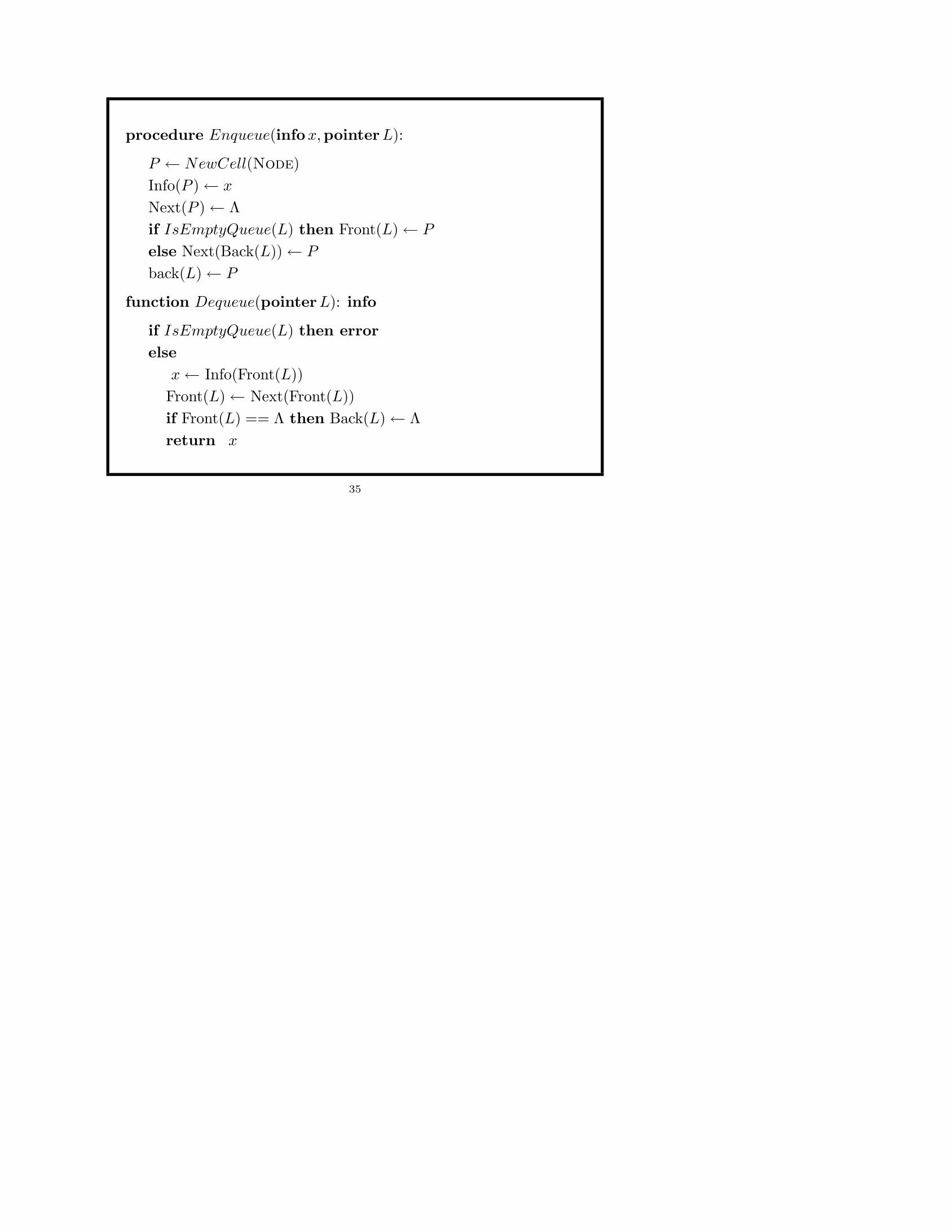
procedure Enqueue(infox,pointerL):
P ← NewCell(Node)Info(P )← x
Next(P )← Λif IsEmptyQueue(L) then Front(L)← P
else Next(Back(L))← P
back(L)← P
function Dequeue(pointerL): info
if IsEmptyQueue(L) then errorelse
x← Info(Front(L))Front(L)← Next(Front(L))if Front(L) == Λ then Back(L)← Λreturn x
35

3.3 Stacks and Recursion
Example: Merge Sort
procedure MergeSort(pointerT, integer a, b):
if a < b
then middle← b(a+ b)/2cMergeSort(T, a,middle)mergeSort(T,middle+ 1, b)Combine(T, a,middle, b)
procedure Combine(pointerL, integerhead,mid, tail)
. . .
36

procedure MergeSort(pointerT, integer a, b):On entry T, a, b and the return address are on the stack
mergesort:leave space on the stack for local variable midif a ≥ b then goto exit
mid← b(a+ b)/2cPush(return1, S);Push(T, S);Push(a, S);Push(mid, S)goto mergesort
return1:Push(return2, S);Push(T, S);Push(mid+ 1, S);Push(b, S)goto mergesort
return2:merge two sorted sublists into one
exit: discard local variables, Pop and goto return address
37

3.4 List Representation for Traversals
Traversal: perform a specified operation Visit on some orall elements of L in a specified order.
On linked memory:
examples:
(1) Find the last word in list L ending with the same letter as w
routine traversal
(2) Find the word that precedes w in the list by n positions
use a stack to store pointers
(3) link inversion
without using additional memory
38

3.5 Doubly Linked Lists
operations:
deletion example
insertion example
”pointer compression”: exclusive-OR coded doubly linked list
39

Chapter 4. Trees
4.1 Basic definitions
4.2 Special kinds of trees
4.3 Tree operations and traversals
4.4 Tree implementations
4.5 Implementing tree traversals and scans
40

4.1 Basic Definitions
nodes, edges, root
Tree are defined recursively
1. a single node, with no edges, is a tree. The root of the tree is itsunique node.
2. Let T1, . . . , Tk be trees with no nodes in common, and r1, . . . , rk
be the roots of these trees, respectively. Let r be a new node. ThenT consisting of the modes and edges of T1, . . . , Tk, the new node r,and new edges 〈r, r1〉, . . . , 〈r, rk〉, is a tree. The root of the tree T isr. T1, . . . , Tk are called subtrees of T .
41

Other terms: parent, children, siblings, descendant, ancestor, path,leaf
height of a node: the length of the longest path from the node to aleaf.
depth of a node: the length of path from the root to the node.
42

4.2 Special Kinds of Trees
An ordered tree is a tree with a linear order on the children of eachnode.
A binary tree is an ordered tree with at most two childen for eachnode. (left child and right child)
It is convenient to define empty binary tree Λ. So binary tree candefined with the following
“A binary tree is either Λ or a node with left and right subtrees,each of which is a binary tree.”
A binary tree is full if it has no nodes with only one child.
43
A perfect binary tree is a full binary tree in which all leaves havethe same depth.
Theorem: a perfect binary tree of height h has 2h+1 − 1 nodes,with 2h leaves and 2h − 1 nonleaves.
A complete binary tree:
(1) a complete binary tree of height 0 is a single node;
(2) a complete binary tree of height 1 is a tree of height 1 with
either two children or a left child only;
(3) For h ≥ 2, a complete binary tree of height h is a root with
two subtree satisfying one of these two conditions:
(a) the left subtree is a perfect binary tree of height h− 1 and the
right subtree is a complete binary tree of height h− 1,
(b) the left subtree is a complete binary tree of height h− 1 and
the right subtree is a perfect binary tree of height h− 2.
44

Any ordered tree can be converted to a binary tree. How?
45

4.3 Tree Operations and Traversals
Given node v, the following operations:
Parent(v): return the parent of vChildren(v); return the set of children of vF irstChild(v): return the first child of vRightSibling(v): return the right sibling of vLeftSibling(v):LeftChild(v), RightChild(v)IsLeaf(v), Depth(v), Height(v).
We first discuss some applications of these operations.
46
Arithmetic expression evaluations
Infix expressions such as 20× 2 + 3 can be described by full binarytrees.
function Evaluate(pointerP ) : integerif IsLeaf(P ) then return Label(P )else
xL ← Evaluate(LeftChild(P ))xR ← Evaluate(RightChild(P ))op← Label(P )return ApplyOP (op, xL, xR)
47
Traversals on trees: postorder, inorder, and preorder
procedure Postorder(pointerP ) :for each child Q of P , in order do
Postorder(Q)V isit(P )
procedure Pretorder(pointerP ) :V isit(P )for each child Q of P , in order do
Pretorder(Q)
procedure Inorder(pointerP ) :if P = Λ then returnelse
Inorder(LeftChild(P ))V isit(P )Inorder(RightChild(P ))
48
4.4 Tree Implementations
representation of binary trees
the standard representation: LC, RC,
representation of ordered trees
binary trees, ternary trees, k-ary trees
binary tree representation of ordered trees:
FirstChild and RightSilbing
representation of complete binary
without pointer in contiguous memory
49

4.5 Implementing Tree Traversals and Scans
stack-based traversals
recursive traversal, for example:
procedure InorderTraversal(pointerP ):
if P 6= Λ then
InorderTraversal(LC(P ))
visit(P )
InorderTraversal(RC(P ))
50

Non-recursive traversal how to refine the following algorithm?
keep push to stack of current node, go to its left child
until its left child is empty
pop the stack and visit the node just popped
let the current node be the right child
repeat whole thing
51
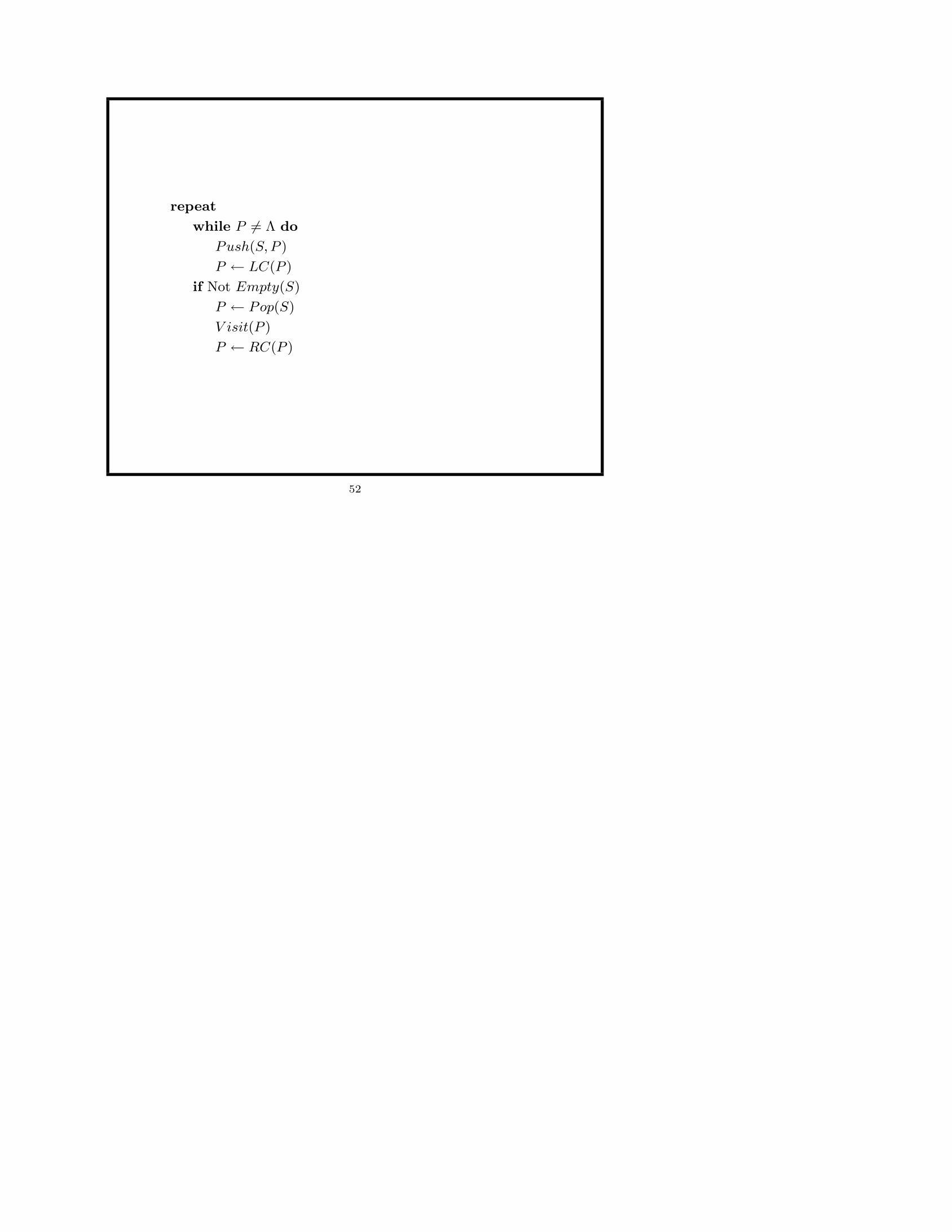
repeat
while P 6= Λ do
Push(S, P )
P ← LC(P )
if Not Empty(S)
P ← Pop(S)
V isit(P )
P ← RC(P )
52
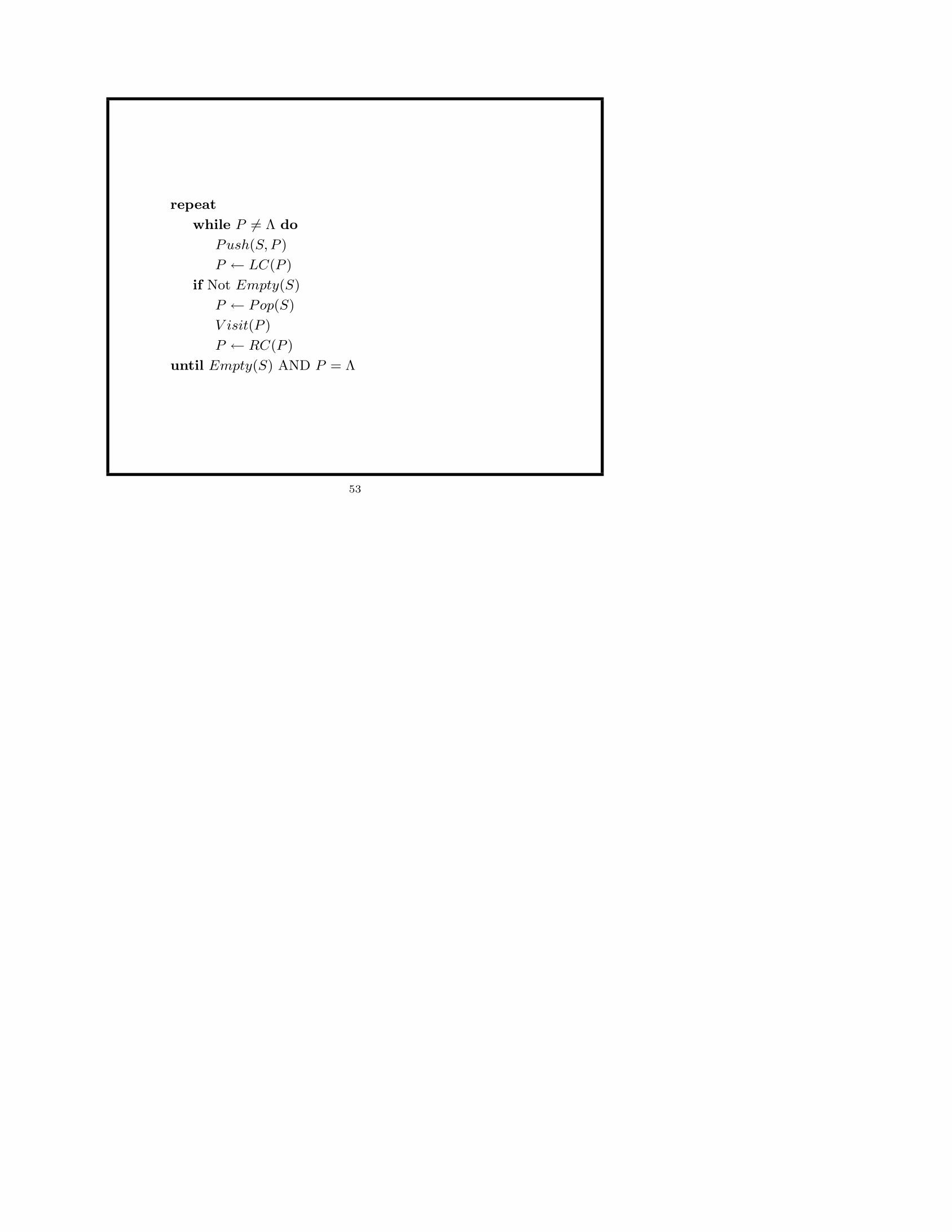
repeat
while P 6= Λ do
Push(S, P )
P ← LC(P )
if Not Empty(S)
P ← Pop(S)
V isit(P )
P ← RC(P )
until Empty(S) AND P = Λ
53

Now how to do pre-order and post-order traversals with a stack?
which parts to modify?
repeat
while P 6= Λ do
Push(S, P )
P ← LC(P )
if Not Empty(S)
P ← Pop(S)
V isit(P )
P ← RC(P )
until Empty(S) AND P = Λ
54
Computing the height of a binary tree
the height of the root is the max heightbetween its left and right child
recursive, which mode of traversal is suitable?
idea:
how about using non-recursive traversal?
idea:
55

The height of the stack needed is the height of the binarytree
Where to compute the height?
repeat
while P 6= Λ do
Push(S, P )
P ← LC(P )
if Not Empty(S)
P ← Pop(S)
V isit(P )
P ← RC(P )
until Empty(S) AND P = Λ
56
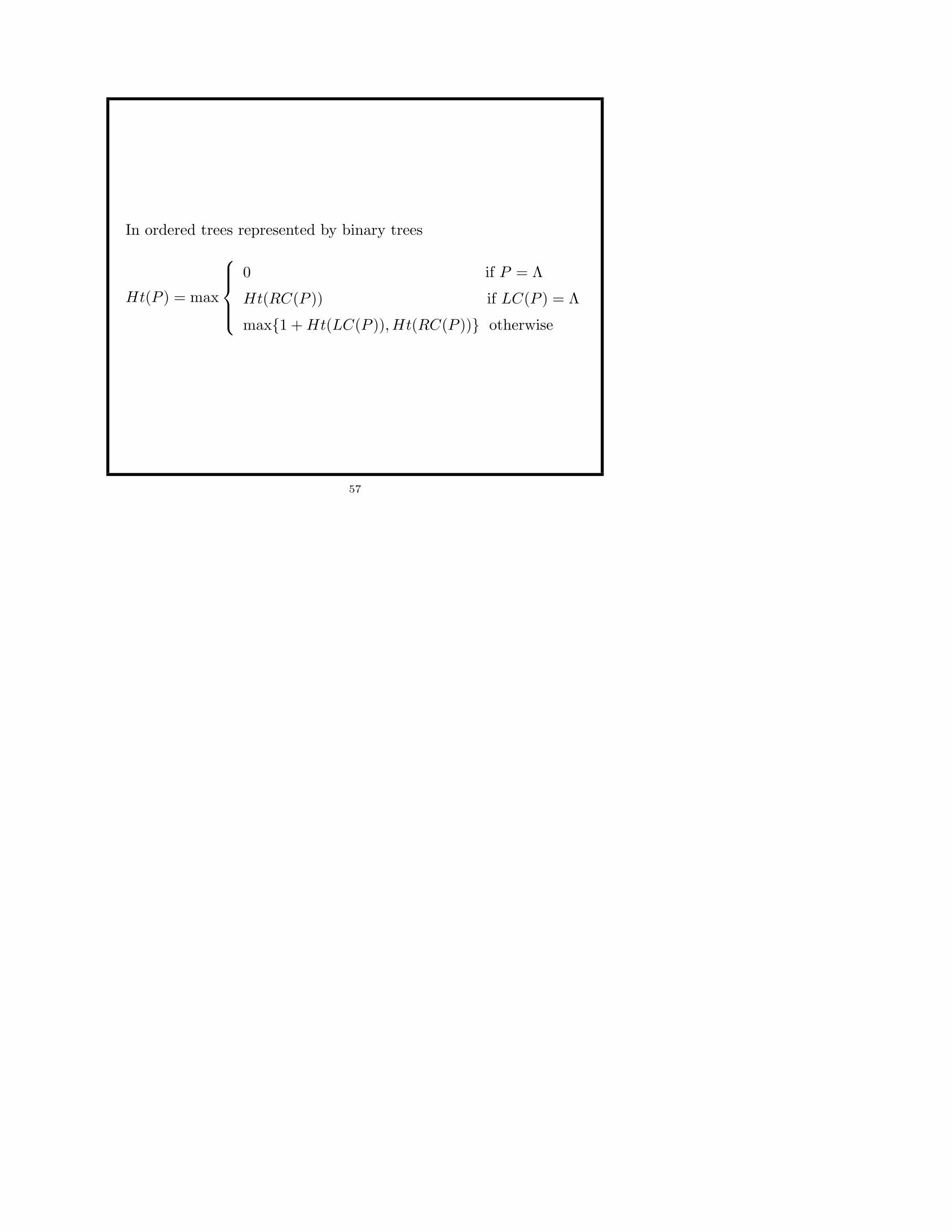
In ordered trees represented by binary trees
Ht(P ) = max
0 if P = Λ
Ht(RC(P )) if LC(P ) = Λ
max1 +Ht(LC(P )), Ht(RC(P )) otherwise
57

link-inversion traversal
when the structure of the tree can be altered during the traversal
In each of the following groups, statements are executed simultaneously:
descend to left: P ← Q
Q← LC(Q)
LC(Q)← P
descend to right: P ← Q
Q← RC(Q)
RC(Q)← P
ascend from left: Q← P
P ← LC(P )
LC(P )← Q
ascend from right: Q← P
P ← RC(P )
RC(P )← Q
58

procedure LinkInversionTraverse(pointerQ):
P ← Λ
repeat forever
while Q 6= Λ do
Tag(Q)← 0
descend to left
while P 6= Λ and Tag(P ) = 1 do
ascend from right
if P = Λ then return
else
ascend from left
visit(Q)
Tag(Q) = 1
descend to right
59
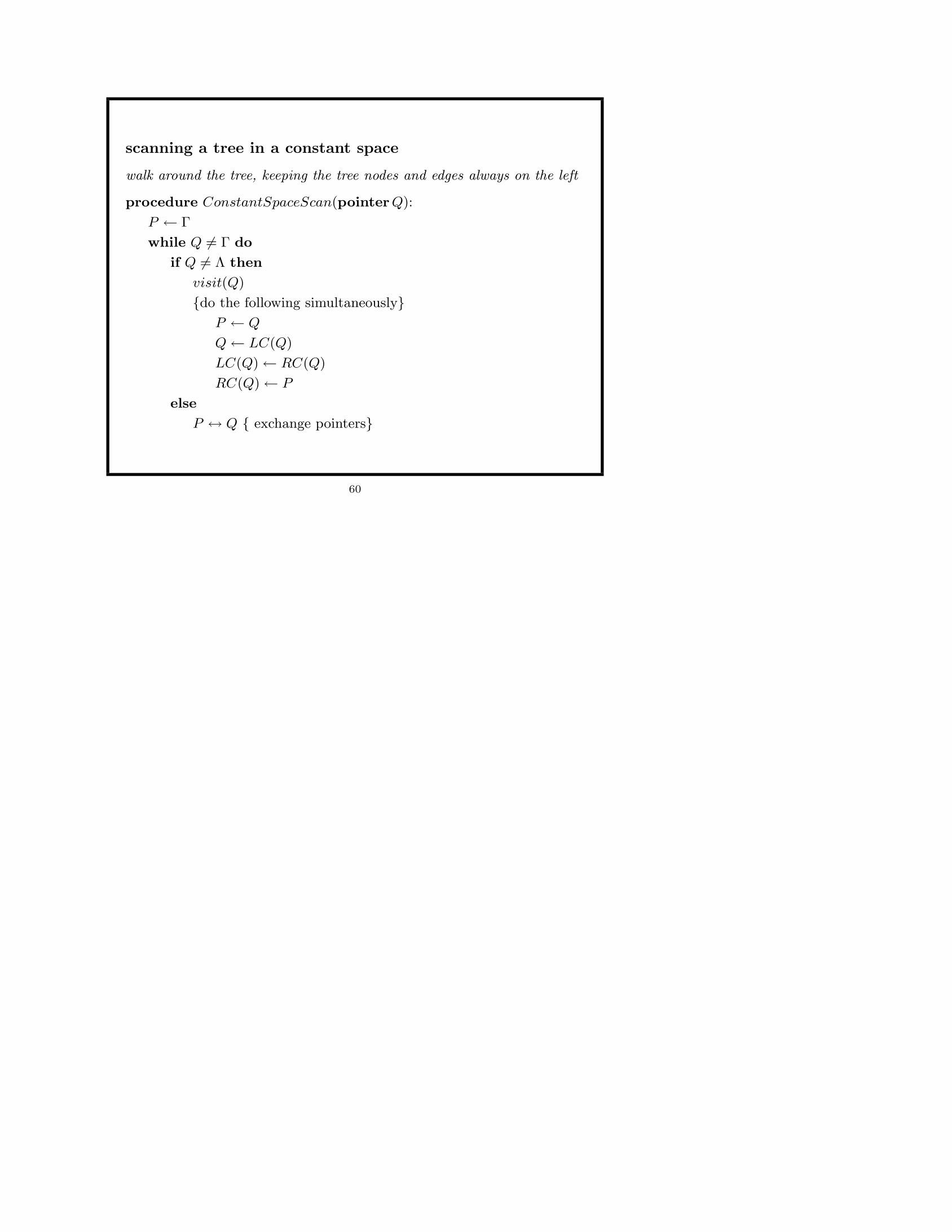
scanning a tree in a constant space
walk around the tree, keeping the tree nodes and edges always on the left
procedure ConstantSpaceScan(pointerQ):
P ← Γ
while Q 6= Γ do
if Q 6= Λ then
visit(Q)
do the following simultaneouslyP ← Q
Q← LC(Q)
LC(Q)← RC(Q)
RC(Q)← P
else
P ↔ Q exchange pointers
60
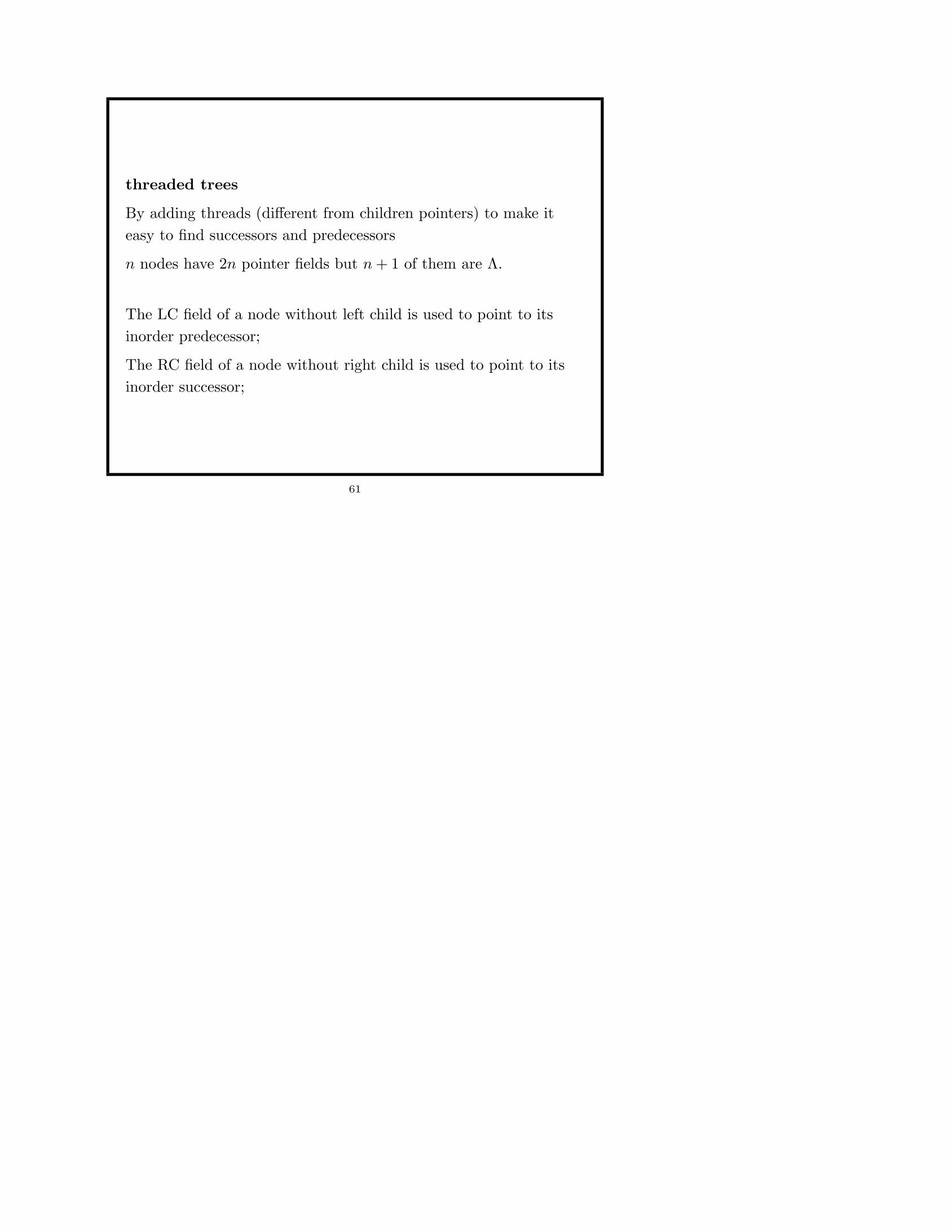
threaded trees
By adding threads (different from children pointers) to make iteasy to find successors and predecessors
n nodes have 2n pointer fields but n+ 1 of them are Λ.
The LC field of a node without left child is used to point to itsinorder predecessor;
The RC field of a node without right child is used to point to itsinorder successor;
61

function InorderSuccessor(pointerN) : pointer
P ← RC(N)
if P = Λ then return Λ
else if P is not a thread then
while LC(P ) is not a thread or Λ do
P ← LC(P )
return P
How much time is needed to find the successor?
62

function PreorderSuccessor(pointerN) : pointer
if LC(N) is not a thread and is not Λ then return LC(N)
else
P ← N
while RC(P ) is a thread do
P ← RC(P )
if RC(N) = Λ then return Λ
else return RC(P )
How much time is needed to find the successor?
63