csce452 lecture8 behavior based robotics slides
TRANSCRIPT

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 1/29
1
Behavior-Based Robotics
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 2/29
2
A.I. Robotics
The keystone ideas behind this approach are:
• Representations, Reasoning, Planning
• Model Building (for example, geometric maps)• Functional Decomposition, Hierarchical systems
• Symbol manipulation
sensors actuators
m o t or c on t r ol
t a s k ex e c u t i on
pl anni n g
m o d el i n g
p er c e p t i on
In traditional Artificial Intelligence robot brains are serial processing units.
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 3/29
3
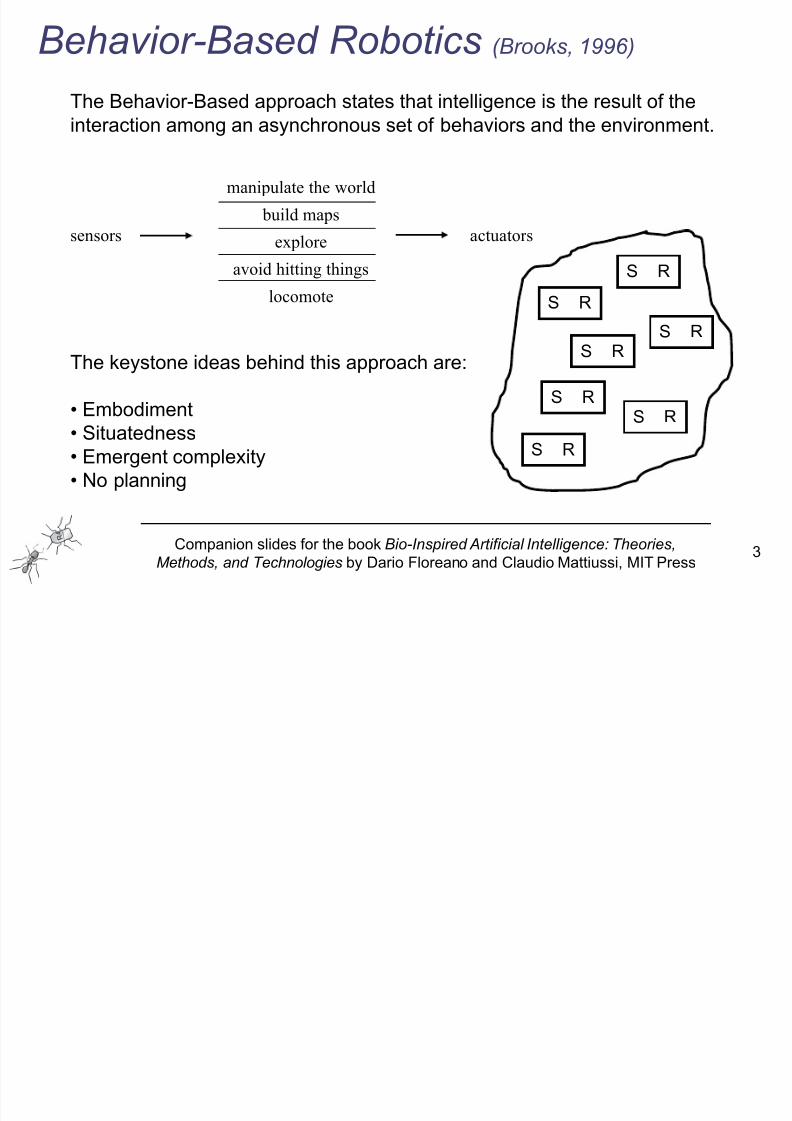
Behavior-Based Robotics (Brooks, 1996)
sensors actuators
manipulate the world
build maps
explore
avoid hitting thingslocomote
The Behavior-Based approach states that intelligence is the result of the
interaction among an asynchronous set of behaviors and the environment.
The keystone ideas behind this approach are:
•
Embodiment• Situatedness
• Emergent complexity
• No planning
S R
S R
S R
S R
S R
S R
S R
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 4/29
4
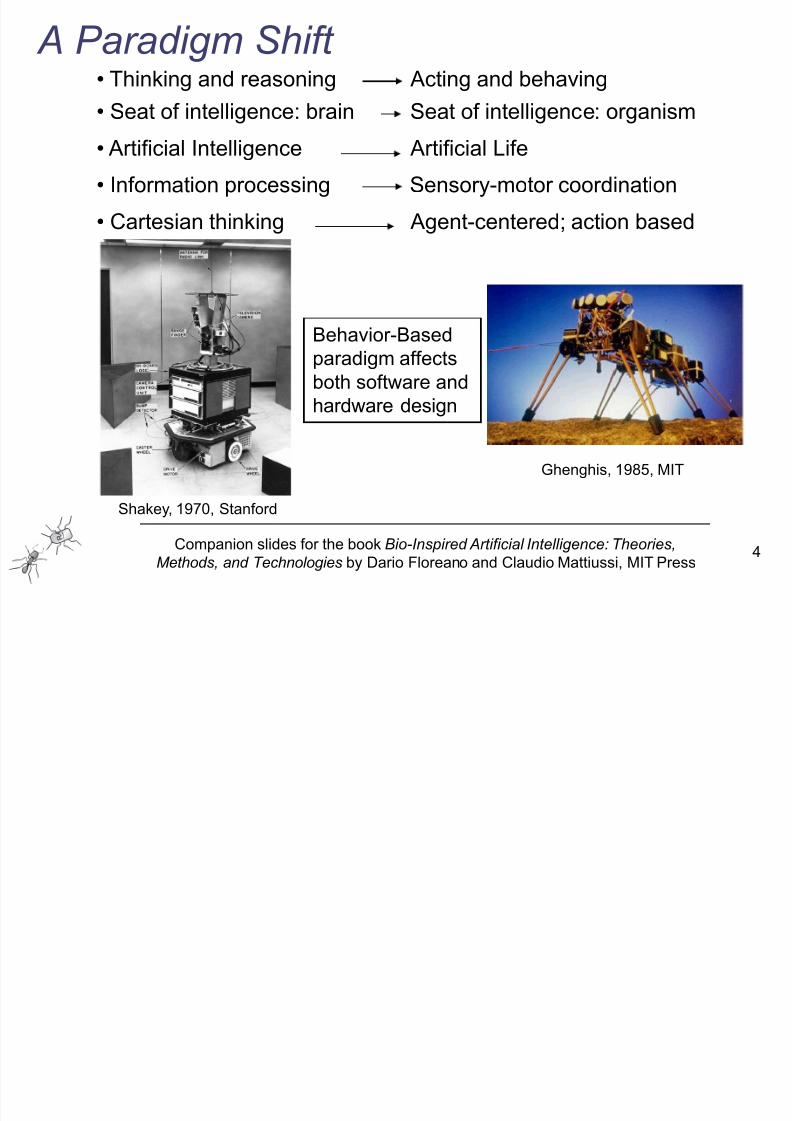
A Paradigm Shift
Behavior-Based
paradigm affects
both software and
hardware design
• Thinking and reasoning Acting and behaving
• Seat of intelligence: brain Seat of intelligence: organism
• Artificial Intelligence Artificial Life
• Information processing Sensory-motor coordination
• Cartesian thinking Agent-centered; action based
Shakey, 1970, Stanford
Ghenghis, 1985, MIT
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 5/29
5
Priorities
for RoboticsFrom Brooks, 1998
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 6/29
6
• A behavior is a reaction to a stimulus
stimulus BEHAVIOR response
TURN-RIGHT
A behavior
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 7/29
7
• Exploration/directional behaviors (move in a general direction)
heading based, wandering
• Goal-oriented appetitive behaviors (move towards an attractor)
discrete object attractor, area attractor • Aversive/protective behaviors (prevent collision)
avoid stationary objects, elude moving objects (escape), aggression
• Path following behaviors (move on a designated path)
road following, hallway navigation, stripe following
• Postural behaviors
balance, stability• Social/cooperative behaviors
sharing, foraging, flocking
• Perceptual behaviors
visual search, ocular reflexes
• Walking behaviors (for legged robots)
gait control
• Manipulator-specific behaviors (for arm control)reaching, moving
• Gripper hand behaviors (for object acquisition)
grasping [from Arkin, 1998]
Examples of behaviors
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 8/29
8
BEHAVIORAL
MODULE
S
I
R
INPUT
LINESOUTPUT
LINES
reset
inhibition
suppression
Augmented Finite State Machine
- local computation
- mappable into hardware- no global clock, memory, bus
- no central models
A Behavioral Module (Brooks, 1986)
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 9/29
9
Subsumption architecture (Brooks, 1986)
C o l l i s i
o n a v o i d a n c e
• The architecture is built incrementally• Start by building in lowest level of competence
• Validate on robot, debug, adjust, validate, adjust, …
• Robot is immediately operational
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 10/29
10
Subsumption architecture (Brooks, 1986)
n a v i g a
t i o n
• Novel layer exploits (subsumes) earlier competence
• Earlier behaviors are not modified
• Design, test, debug, adjust, test, adjust,…
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 11/29
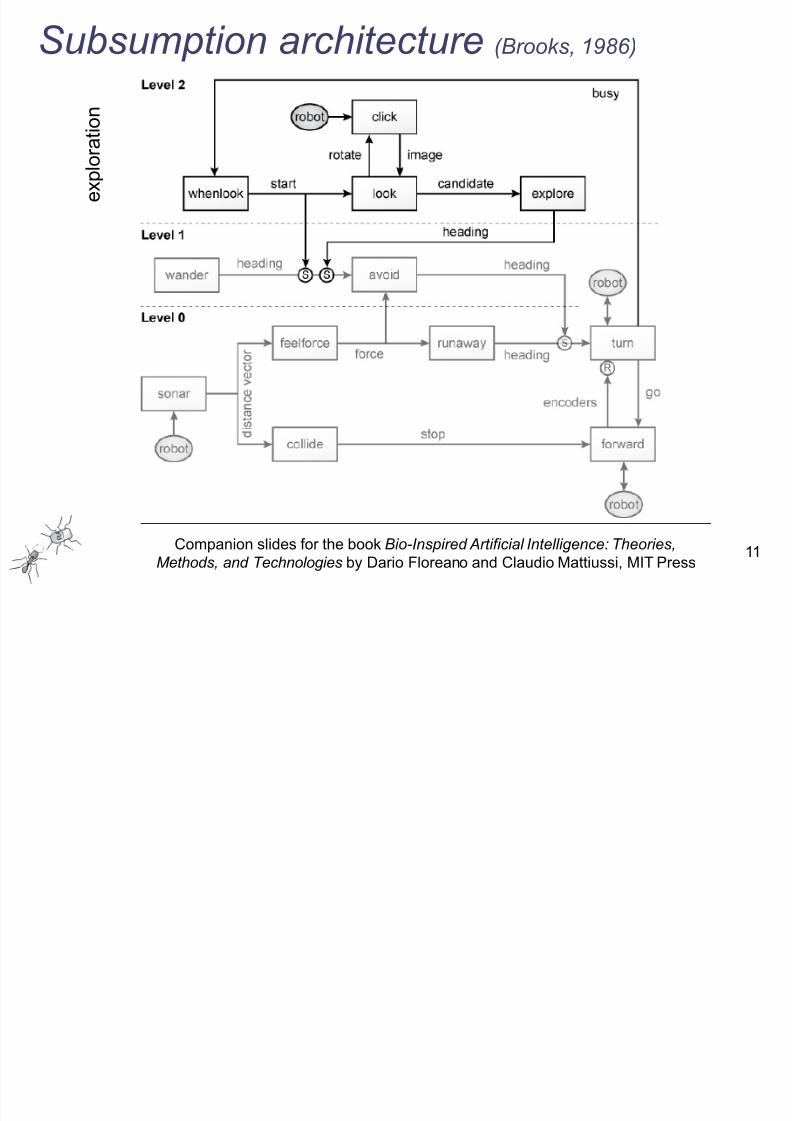
11
Subsumption architecture (Brooks, 1986)
e x p l o r a t i o n
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 12/29
12
Assess
Agent-Environment
Dynamics
Partition
Into Situations
Create
Situational
Responses
Import
Behaviors
to Robot
Run Robotic
Experiments
Evaluate
Results
Enhance,
Expand,
CorrectBehavioral
Responses
Done
Methodology
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 13/29
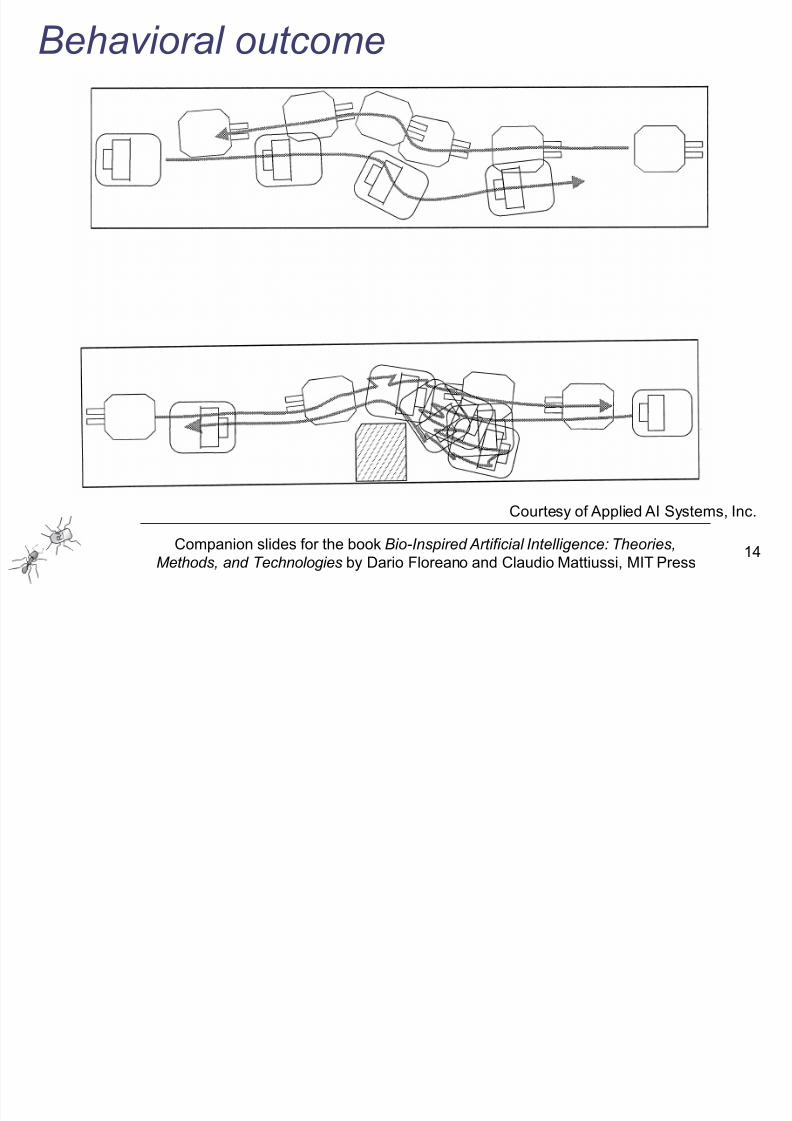
13
Two robots must get to the
opposite end of a narrow
corridor.
Conflict resolution
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 14/29
14
Courtesy of Applied AI Systems, Inc.
Behavioral outcome
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 15/29
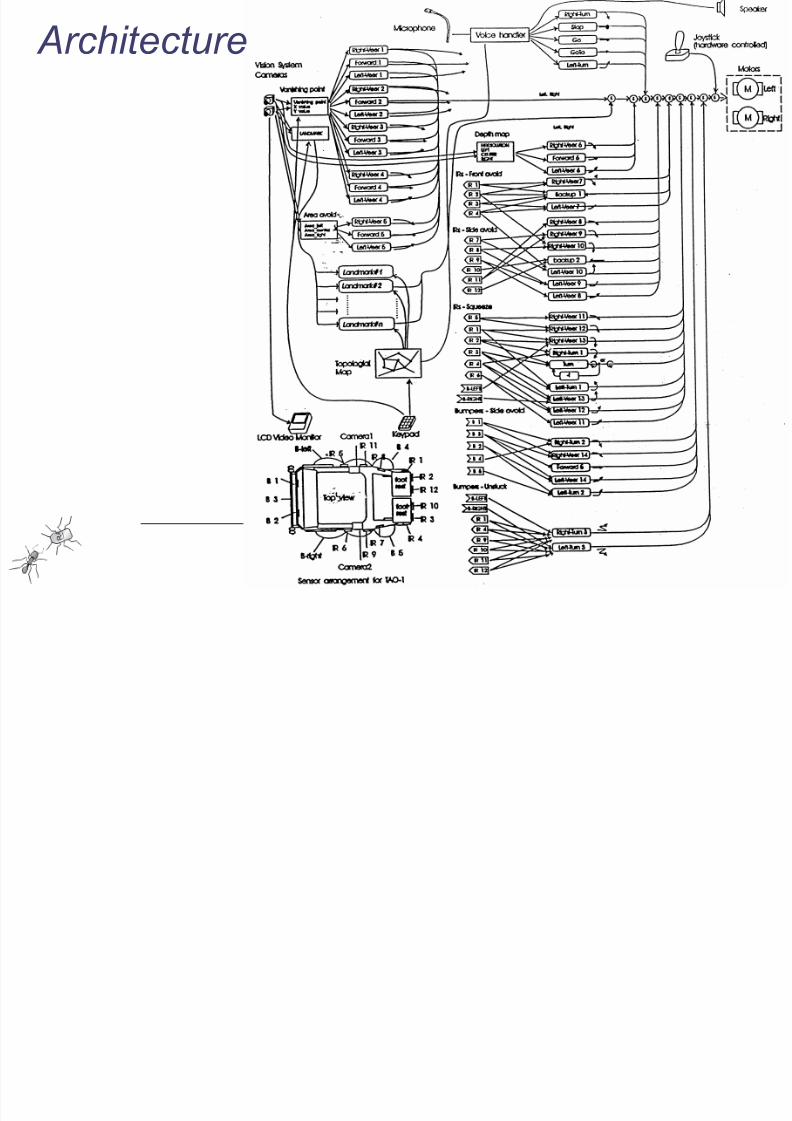
15
TAO1 - Courtesy of
Applied AI Systems, Inc.
Intelligent wheelchair
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 16/29
16Laboratory of Intelligent Systems
http://lis.epfl.ch 16
Architecture

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 17/29
17
Behavior Coordination
Competitive methods:priority
action-selection
vote-based
Cooperative methods:fusion
obstacle avoidance
seek gas leak
battery recharge
tele-operation
Behavior coordinationIn addition to Subsumption Architecture, there are a few other ways
of coordinating behaviors
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 18/29
18
behavior 1
behavior 2
behavior 3
behavior 4Response of behavior
With highest level
of subsumptionPRIORITY-BASED
P
E
R
CE
P
T
I
O
N
Priority Based (subsumption)
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 19/29
19
MAX[act(b1),act(b2),
act(b3),act(b4)]
behavior 1
behavior 2
behavior 3
behavior 4
Response of behavior withhighest activation level
ACTION SELECTION
P
E
R
C
E
P
T
I
O
N
Action Selection (Maes, 1989)
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 20/29
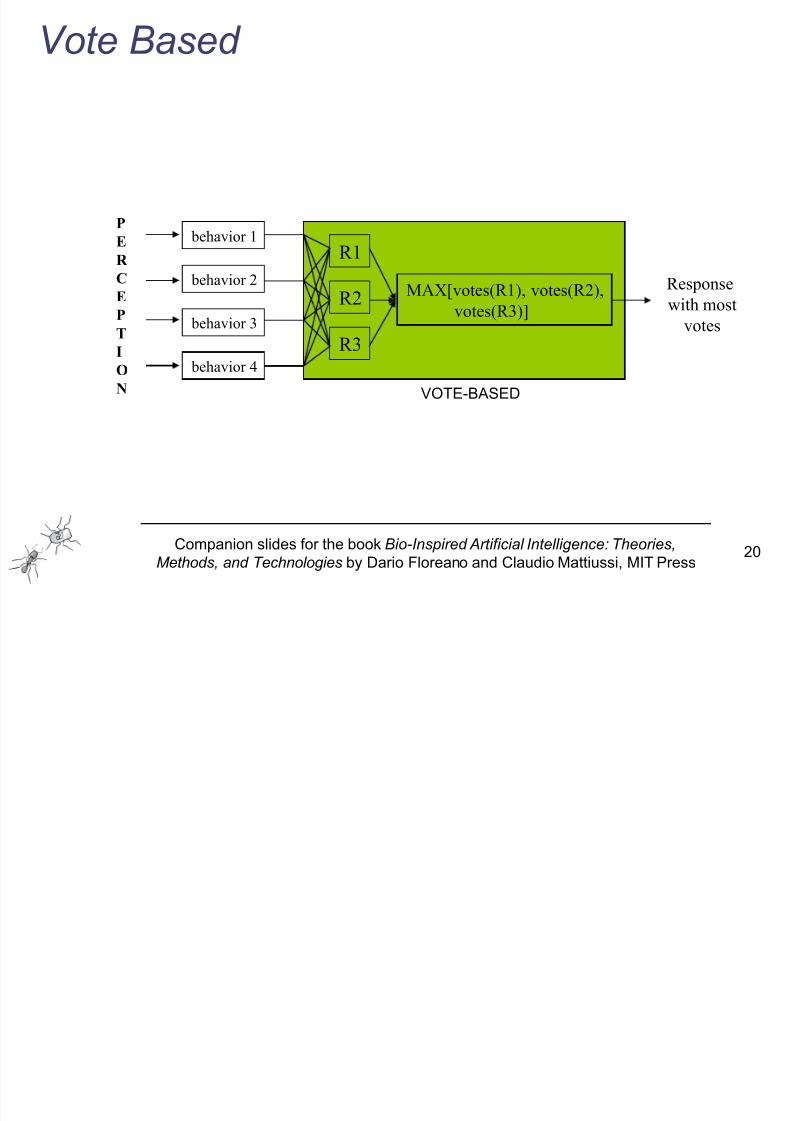
20
behavior 1
behavior 2
behavior 3
behavior 4
Responsewith most
votes
VOTE-BASED
P
E
R
CE
P
T
I
O
N
R1
R2
R3
MAX[votes(R1), votes(R2),
votes(R3)]
Vote Based
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 21/29
21
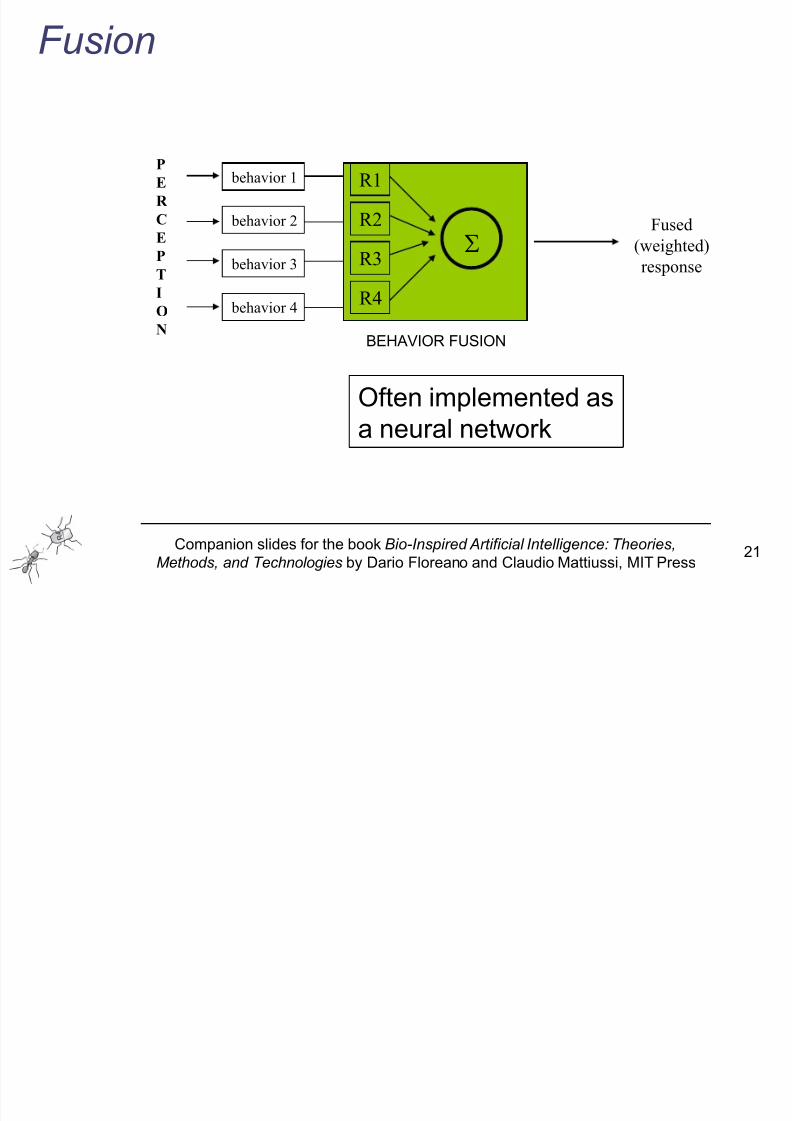
behavior 1
behavior 2
behavior 3
behavior 4
Fused
(weighted)
response
BEHAVIOR FUSION
P
E
R
C
E
P
TI
O
N
R1
R2
R3
R4
Σ
Often implemented as
a neural network
Fusion
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 22/29
22
MIT Artificial Intelligence Laboratory
video clips
MIT historical behavior-based robots
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 23/29
23
Comparison (Arkin, 1998)
Traditional Behavior-based
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 24/29
24
AIBO family
Sony
Intelligence based on behavior technology
Speech and touch interaction
Excellent mechanics
Learning abilities (walk)
Mood change
Remote control
Behavior sticks
Picture snapshot
Robot-to-robot interaction
Applications: entertainment
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 25/29
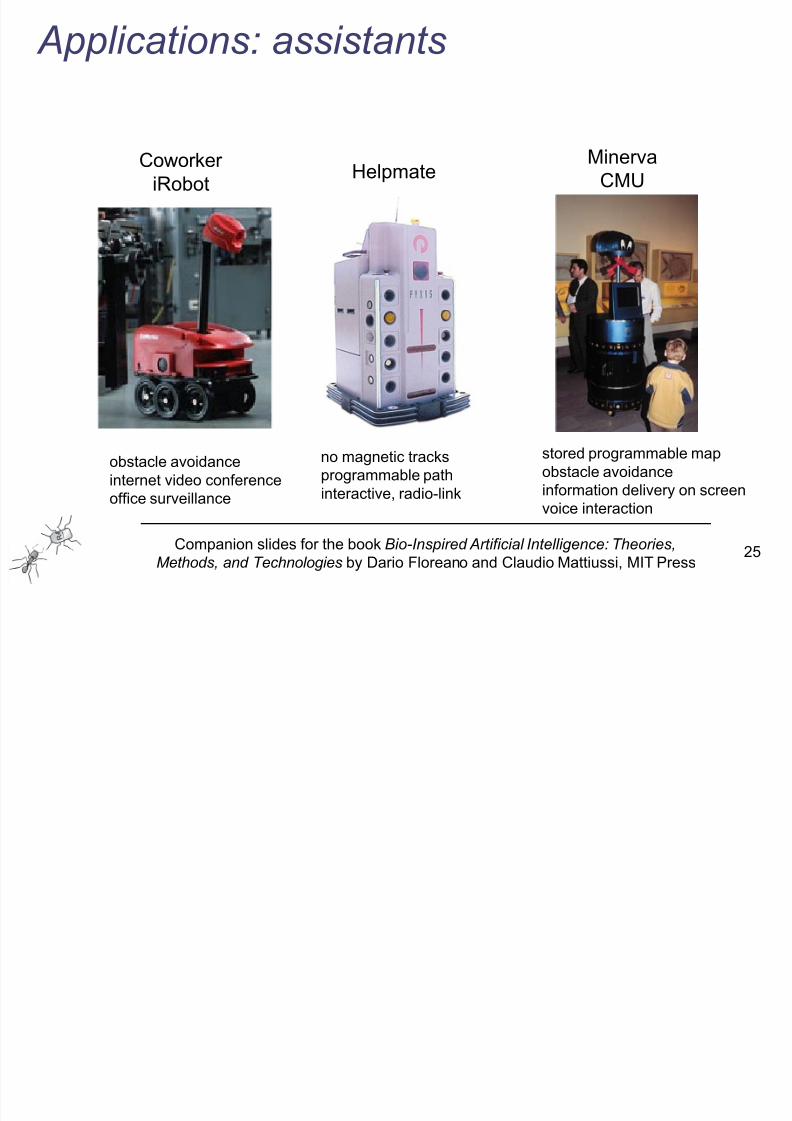
25
Helpmate
no magnetic tracks
programmable path
interactive, radio-link
Coworker
iRobot
obstacle avoidance
internet video conference
office surveillance
Minerva
CMU
stored programmable map
obstacle avoidance
information delivery on screen
voice interaction
Applications: assistants
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 26/29
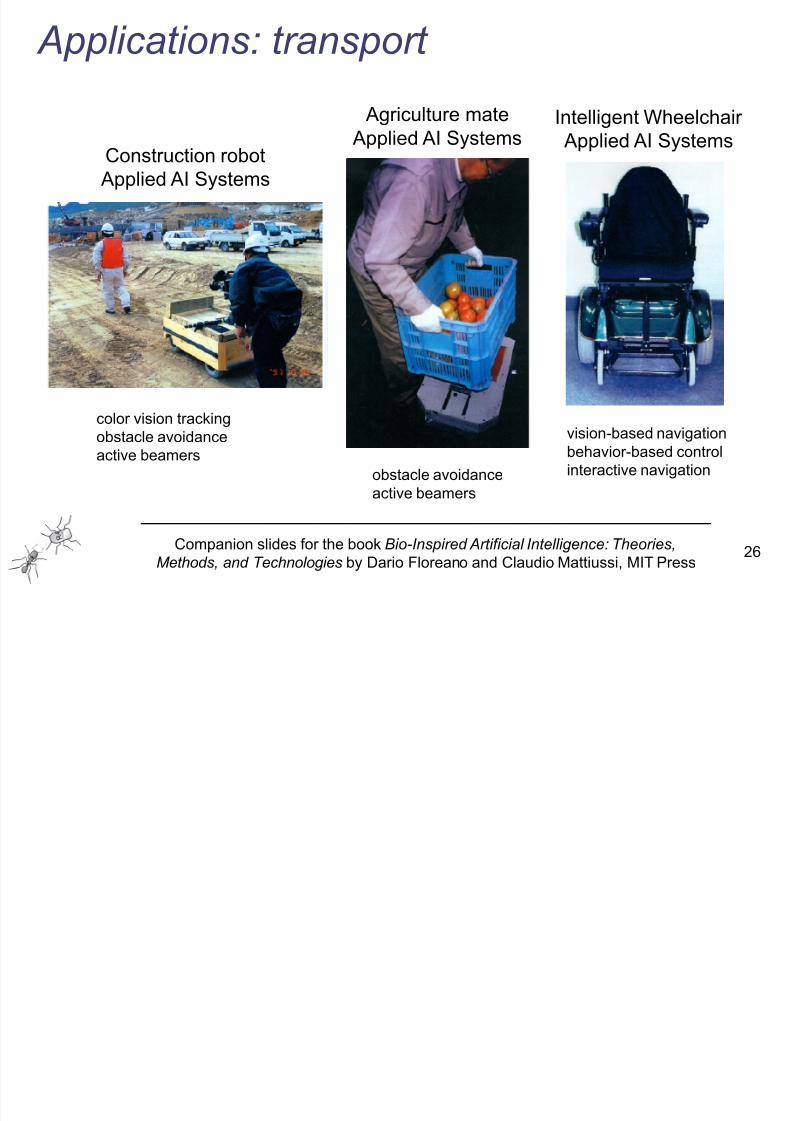
26
Construction robot
Applied AI Systems
color vision trackingobstacle avoidance
active beamers
Agriculture mate
Applied AI Systems
obstacle avoidance
active beamers
Intelligent Wheelchair
Applied AI Systems
vision-based navigation
behavior-based control
interactive navigation
Applications: transport
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 27/29
27
Nomad
CMU
mobile camera
spectrometer
magnetometer compass
mineral sampling
Packbot
iRobot
all terrain, including stairs
3 mt fall
radio steeringcamera
Ariel
iRobot
underwater, crab-like motion
double-sided
can be fitted with sensors
Applications: exploration
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press
5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 28/29
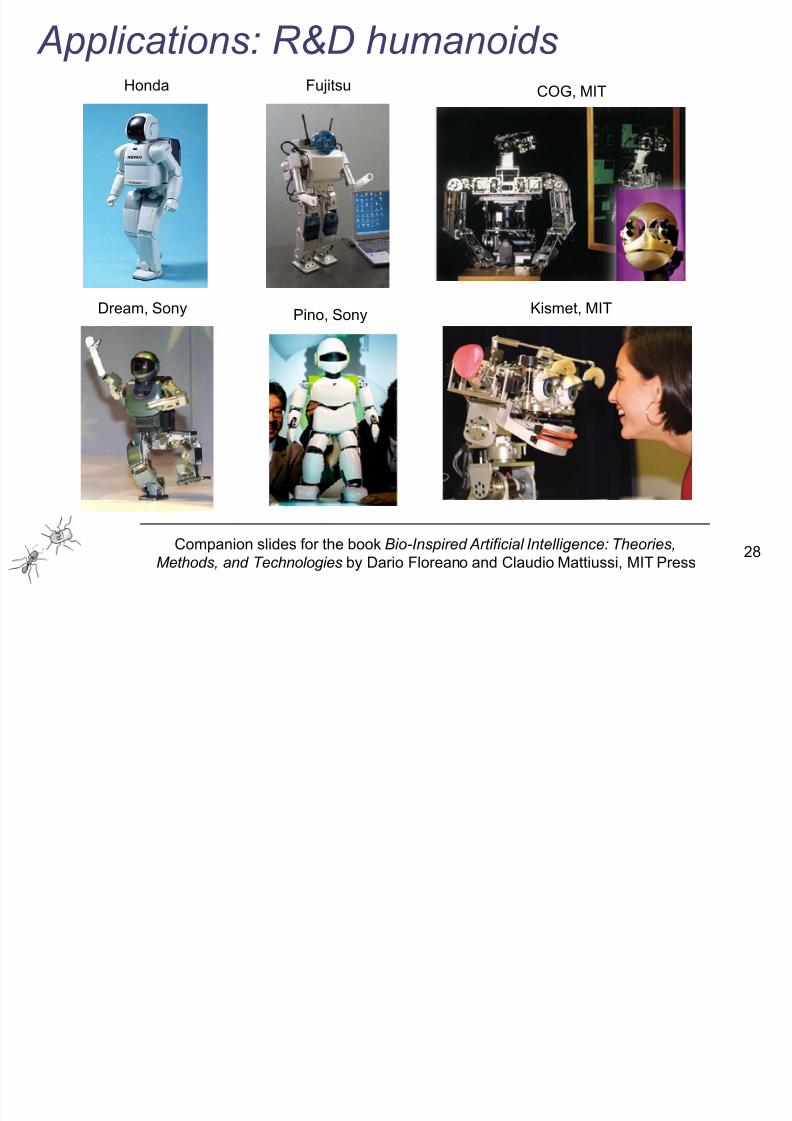
28
COG, MIT
Dream, Sony
Fujitsu
Pino, Sony Kismet, MIT
Honda
Applications: R&D humanoids
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press

5/16/2018 CSCE452 Lecture8 Behavior Based Robotics Slides - slidepdf.com
http://slidepdf.com/reader/full/csce452-lecture8-behavior-based-robotics-slides 29/29
29
• Intelligence is in the eye of the observer
• The world is its own best model
• Simplicity is a virtue
• Planning is a way of avoiding figuring out what to do next
• Robustness in the presence of noise or failing sensors is a design goal
• Systems should be built incrementally
• No representations. No calibration. No complex computers.
• No high-bandwidth communication
Closing remarks (Brooks)
http://lis.epfl.ch/podcast
Companion slides for the book Bio-Inspired Artificial Intelligence: Theories,
Methods, and Technologies by Dario Floreano and Claudio Mattiussi, MIT Press