cscc-13 rad sa sorinom
TRANSCRIPT

8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 1/6
Abstract In this paper is presenting a reactive homopolar
brushless synchronous machine (RHBSM) and a reactive homo-
heteropolar brushless synchronous machine (RHHBSM) with stator
excitation destined to operate as low power generator or servomotor
with variable speed. Hereby are presented two mathematical models,
the orthogonal one and the one of the spatial phasors. Based on these,
is designed the control system and are presented the results obtained
by simulation. The work is presented as an integrated design of
machines, drive and controller.
Keywords orthogonal model, simulations, sensorless control,
space-phasor model.
I. INTRODUCTION
N THIS paper is described the design, construction and
control of a reactive synchronous homo-heteropolar and
homopolar brushless synchronous machines (RHHBSM,
RHBSM) generator/motor for variable speed.
For modeling and simulation were used two methods: the
field tubes method – which brings acceptable simplifications,
taking into account the magnetic saturation of the ferromagneticcore, and the types of electric windings and 3D FEM analysis
with specialized software [1] – [3].
The classic synchronous machines have the following main
disadvantage: the armature rotor excitation which determines
a great rotor inertia and weight, and involves the brushes and
slip rings.
In [4] is presented a form of heteropolar linear synchronous
machine that is able to provide both thrust and lifting force at
relatively high efficiencies and power factor.
Starting form this idea, there were developed two rotating
reactive models with stator excitation, one homopolar and the
Manuscript received September 27, 2010.
Sorin Ioan Deaconu is with Electrical Engineering Department,
“Politechnica” University of Timisoara, Revolutiei str., no. 5, Hunedoara,
331128, Romania (phone: 0040254207529; fax: 0040254207501; e-mail:
Lucian Nicolae Tutelea is with Electrical Engineering Department,
“Politechnica” University of Timisoara, V. Parvan str., no. 1-2, corp D, etaj 1,
Timişoara, Romania (e-mail: [email protected]).
Gabriel Nicolae Popa is with Electrical Engineering Department,
“Politechnica” University of Timisoara, Revolutiei str., no. 5, Hunedoara,
331128, Romania (e-mail: [email protected]).
Tihomir Latinovic is with Robotics Department, University of Banja Luka,
Bosnia and Hercegovina (e-mail:[email protected]).
other homo-heteropolar [1] – [3], which removes the
disadvantages of the classic synchronous machines.
Although not widely used in practice, synchronous
homopolar machine has been researched for a variety of
applications. They are sometimes referred to as homopolar
inductor generator/motors’ [5], [6], or simply as homopolar
motors’ [7], [8]. The defining feature of this machine is the
homopolar or homo-heteropolar d-axis magnetic field created
by a field winding [5], [6], [8] - [10] and permanent magnets
and windings [7].
However, in case of the synchronous homopolar machine,
the field winding is fixed to the stator and generally encircles
the rotor rather than being placed on the rotor. There are
several advantages to having the field winding in the stator.
Among these is the elimination of slip rings and greatly
simplified rotor construction, making it practical to construct
the rotor from a single piece of high-strength steel. The other
rotor designs feature laminations [8], permanent magnets [7],
or other non-magnetic structural elements to increase strength
and reduce winding age losses [6]. Other advantages of
having the field winding in the stator include ease in coolingand increased available volume [1], [11], [12].
The first part of the paper presents a description of the
synchronous homopolar and homo-heteropolar machines. The
second parts is focused on orthogonal model and space-phasor
model.
The third part presents the machines’ dynamics and control
algorithms’ development, and simulations results for the
control systems.
II. THE CONSTRUCTIVE ELEMENTS
The RHBSM and RHHBSM which we’ll analyze further
are rotary machines. In fig. 1 is presenting a cross-section andlongitudinal section of RHBSM, and in fig 2 a longitudinal
section of RHHBSM.
The excitation coil has a ring shape and is placed in the
windows of the U-shaped laminations stack (fig. 1),
respectively E-shaped laminations stack (fig. 2), and, at
passing of the rotor poles, the field is closing, having by this a
rectangular variation form. When the rotor pole is not under
the laminations stack, the field is practically null [2], [3].
Mathematical models and the control of
homopolar and homo-heteropolar reactive
synchronous machines with stator excitation
Sorin Ioan Deaconu, Lucian Nicolae Tutelea, Gabriel Nicolae Popa and Tihomir Latinovici
I
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 78

8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 2/6
Field coil
Γ
Rotor pole
x v Induced
coil
Stator
core
Fig. 1 Magnetic circuit of RHBSM
Stator core(laminations
stack)
Excitation
coil
Airgap
δ
Rotor
pole
Fig. 2 Longitudinal magnetic circuit’s section of RHHBSM
By this representation, it results a homopolar inductor
magnetic field in the area of the left leg, respectively right leg
of the stator laminations stack which is positive under left and
negative under right leg (fig. 1 and fig. 2) and a heteropolar
inductor magnetic field in the area of the central leg of the
stator laminations stack [2].
For the RHBSM the armature’s winding is in two layers,
with 8-shaped coils (fig. 3), and is placed in the open slots.This winding type allows the elimination of non-uniformities
that might appear if it would be achieved separately on each
leg of the laminations stack [2].
2 181716
15 14 13 12 11 10 9 8 7 6 5 4 3 1
2 181716
15 14 13 12 11 10 9 8 7 6 5 4 3 1
A X
Fig. 3 The armature winding of RHBSM
Fig. 4 and 5 present a 3D representation of the magnetic
circuit and windings of the stator and the rotor of RHBSM in
fig. 6 and 7 for RHHBSM [2], [3].
Excitation
coil
Laminations
stack
Fig. 4 3D representation of the stator magnetic circuit with excitation
coil of RHBSM
Isolated
cylinder
Rotor
pole
Fig. 5 3D representation of the RHBSM rotor
Laminationsstack
Excitationcoil
Armature’s
winding
Fig. 6 3D representation of stator magnetic circuit with field and
armature winding coils of RHHBSM
Similar with RHBSM, the RHHBSM’s armature winding is
placed in the open slots, formed between the laminations
stack. In each slot there are two sides of the coil (fig. 6). The
winding is distributed in three layers. Lateral coils of one
phase are connected in series and the resulting group is
connected in parallel with the respective phase coils of the
central leg. The coils of one phase are distributed in different
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 79
8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 3/6
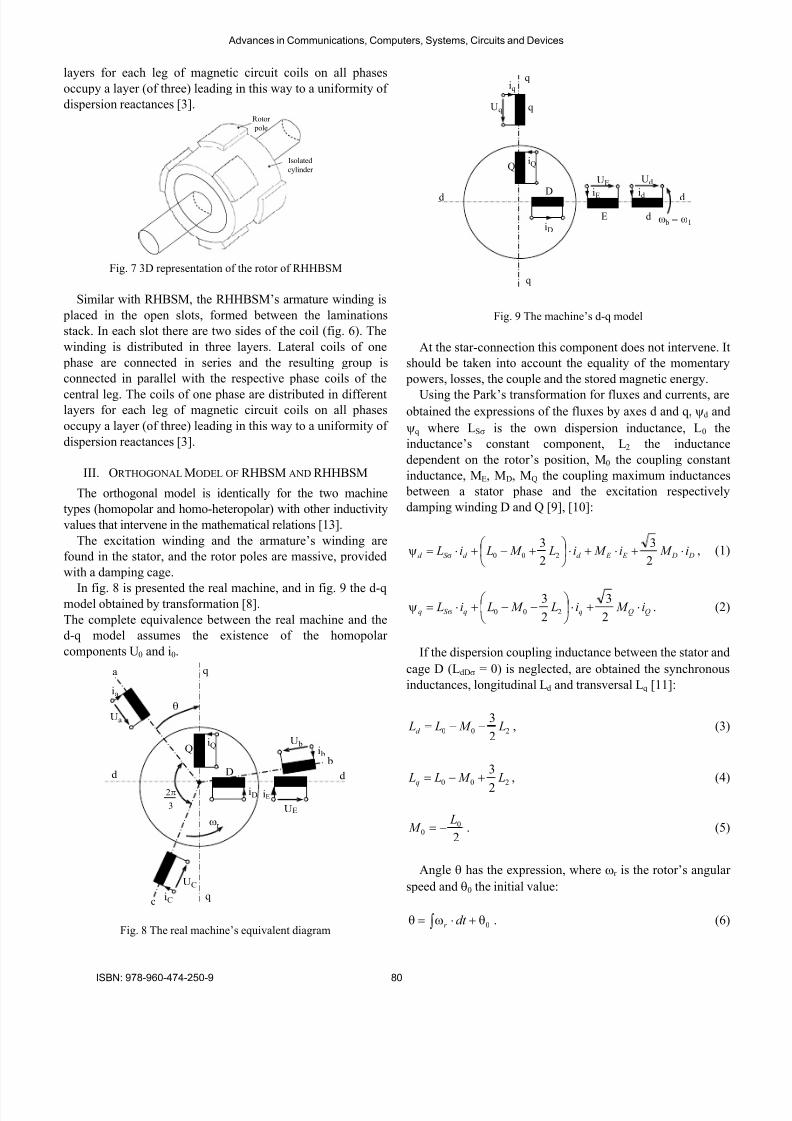
layers for each leg of magnetic circuit coils on all phases
occupy a layer (of three) leading in this way to a uniformity of
dispersion reactances [3].R otor
pole
Isolated
cylinder
Fig. 7 3D representation of the rotor of RHHBSM
Similar with RHBSM, the RHHBSM’s armature winding is
placed in the open slots, formed between the laminations
stack. In each slot there are two sides of the coil (fig. 6). The
winding is distributed in three layers. Lateral coils of one
phase are connected in series and the resulting group is
connected in parallel with the respective phase coils of the
central leg. The coils of one phase are distributed in differentlayers for each leg of magnetic circuit coils on all phases
occupy a layer (of three) leading in this way to a uniformity of
dispersion reactances [3].
III. ORTHOGONAL MODEL OF RHBSM AND RHHBSM
The orthogonal model is identically for the two machine
types (homopolar and homo-heteropolar) with other inductivity
values that intervene in the mathematical relations [13].
The excitation winding and the armature’s winding are
found in the stator, and the rotor poles are massive, provided
with a damping cage.
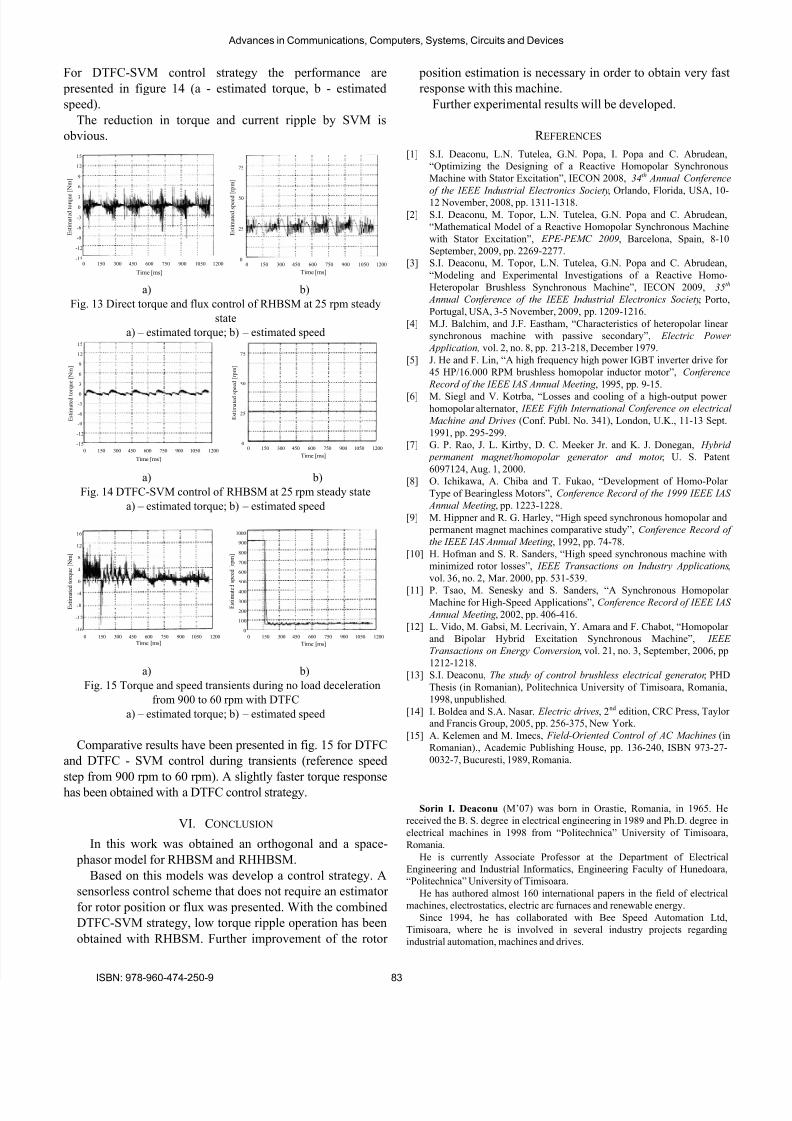
In fig. 8 is presented the real machine, and in fig. 9 the d-qmodel obtained by transformation [8].
The complete equivalence between the real machine and the
d-q model assumes the existence of the homopolar
components U0 and i0.
q
q c i C
U C
U a
ia
a
θ
Q ib
iQ
i D
D
U b
U E
b
d d
ω r
3 2 π iE
Fig. 8 The real machine’s equivalent diagram
U q
d
i q q
q
Q i Q
D
i D
U E
i E
U d
i d E d ω b = ω 1
d
q
Fig. 9 The machine’s d-q model
At the star-connection this component does not intervene. It
should be taken into account the equality of the momentary
powers, losses, the couple and the stored magnetic energy.
Using the Park’s transformation for fluxes and currents, areobtained the expressions of the fluxes by axes d and q, ψd and
ψq where LSσ is the own dispersion inductance, L0 the
inductance’s constant component, L2 the inductance
dependent on the rotor’s position, M0 the coupling constant
inductance, ME, MD, MQ the coupling maximum inductances
between a stator phase and the excitation respectively
damping winding D and Q [9], [10]:
DDE E d d S d iM iM iLM LiL ⋅+⋅+⋅⎟⎠
⎞⎜⎝
⎛ +−+⋅=ψ σ2
3
2
3200
, (1)
QQqqS q iM iLM LiL ⋅+⋅⎟⎠
⎞⎜⎝
⎛ −−+⋅=ψ σ
2
3
2
3200 . (2)
If the dispersion coupling inductance between the stator and
cage D (LdDσ = 0) is neglected, are obtained the synchronous
inductances, longitudinal Ld and transversal Lq [11]:
2002
3LM LLd −−= , (3)
200 2
3LM LL
q
+−= , (4)
2
00
LM −= . (5)
Angle θ has the expression, where ωr is the rotor’s angular
speed and θ0 the initial value:
∫ θ+⋅ω=θ 0dt r . (6)
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 80

8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 4/6
The binding relation between the orthogonal model’s
currents id, iq and i0 and the real machine’s currents ia, ib and ic
is [9]:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
c
b
a
abcdqq
d
i
i
i
P
i
i
i
0
0
, (7)
where:
2 2cos( ) cos( ) cos( )
3 3
2 2 2sin( ) sin( ) sin( )
3 3 3
1 1 1
2 2 2
abcdqP
π π θ θ θ
π π θ θ θ
⎡ ⎤+ −⎢ ⎥
⎢ ⎥⎢ ⎥⎡ ⎤ = + −⎣ ⎦ ⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
, (8)
the same relation being valid also for fluxes,
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ψ
ψ
ψ
⋅=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
ψ
ψ
ψ
c
b
a
abcdqq
d
P 0
0
. (9)
From the previous relations and taking into account the
relation:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
0
0
i
i
i
P
i
i
i
q
d
T
abcdq
c
b
a
, (10)
is obtained:
( ) DDE E d S d iM iM iLLL ⋅+⋅+⋅⎥⎦
⎤⎢⎣
⎡++=ψ σ
2
3
2
320 , (11)
( ) QQqS q iM iLLL ⋅+⋅⎥⎦
⎤⎢⎣
⎡−+=ψ σ
2
3
2
320 , (12)
[ ] 00000 2 iLiM LL S S ⋅≅⋅++=ψ σσ . (13)
Considering a single rotor cage by each axis, the voltages
UD = UQ = 0 and the brushes’ speed ωb = ωr , there are
obtained the general equations of the orthogonal model of the
homo-heteropolar synchronous machine, where R S is the
stator resistance, R E the excitation’s resistance, R D and R Q the
rotor cages’ resistances, Me the electromagnetic torque and p
the number of pole pairs:
qr d
d S d t
U Ri ψ⋅ω+∂
ψ∂−=− , (14)
d r
q
qS qt
U Ri ψ⋅ω+∂
ψ∂−=− , (15)
qr E
E E E t
U Ri ψ⋅ω+∂ψ∂
−=− , (16)
t
Ri DDD
∂
ψ∂−= , (17)
t Ri
Q
QQ ∂
ψ∂−= , (18)
( )d qqd e iipM ⋅ψ−⋅ψ= . (19)
IV. THE SPACE-PHASOR MODEL
We define the stator current space-phasor, si in stator
coordinates [14]:
( )cba
s
s iaiaii ⋅+⋅+⋅=2
3
2. (20)
For distributed windings (q ≥ 2) all the stator- self (Laa),
mutual (Lad, Lac, Laf ), and stator-rotor inductances (Ladr , Laqn)
are dependent of the rotor position θer , and rotor inductances
are independent of this.
The phase a flux linkage λa is:
r qr aqr d r ad f af cacbabaaaa iLiLiLiLiLiL +++++=λ . (21)
Making use of the inductance definition we find:
( ) ( ) ( )
( ) ( ) ( )er j
r qr
r sq
er jr
r d r sd er j*
f af
er j*ssssl a
eijLReeiReLeiReL
eiReLiReLiReL
θθθ
θ
−++
+++=λ
2
2
20
2
3
2
3
2
3
. (22)
The stator flux space-phasor λ s is:
( )cba
ss aa λ+λ+λ=λ 2
3
2, (23)
where λb, λc are similar as in (21).
The stator and rotor equation in d-q coordinates becomes[14]:
,dt
d ir V qr
d d sd λω−
λ+⋅= (24)
d r
q
qsqdt
d ir V λω+
λ+⋅= , (25)
,iL ;dt
d ir V f fl f qr
f
f f f ⋅=λλ⋅ω−λ
+⋅= (26)
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 81

8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 5/6
dmr d l r d r d r d
r d r d iL ;dt
d ir λ+⋅=λ
λ+⋅=0 , (27)
qmr ql r qr qr q
r qr q iL ;dt
d ir λ+⋅=λ
λ+⋅=0 . (28)
The torque Te is [14]:
( ) ( )d qqd
*sse iipijRepT ⋅λ−⋅λ=⋅λ=
2
3
2
3. (29)
Finally, the d-q variables are related to the abc variables by
the Park transformation:
( ) 322
3
2 / jer j
cbaqd s ea ;eV aaV V jV V V π⋅θ− =⋅++=+= . (30)
Note also that all rotor variables are reduced to the stator:
22
d
r drl
drl
d
r dr
dr K
LL ;
K
r r == , (31)
22
q
r
qrl
qrl
q
r
qr
qr K
LL ;
K
r r == . (32)
The equations obtained based on the orthogonal model and
the one of the spatial phasors lead us to the idea that the
second model is more complete, therefore we’ll use it for
designing the control system.
V. CONTROL ALGORITHMS’ DEVELOPMENT
The operation of the RHBSM and RHHBSM synchronous
machines as generator or servomotor with variable speed
presents a special importance at conceiving the adjustment
system’s structure. Based on the spatial phasors’ theory, this
system should be treated unitary. The used model takes in
consideration also the machines’ saturation [15].
A. Basic Control
Scalar control (V / f) is related to sinusoidal current control
without motion sensors (sensorless) (fig. 10) [14]:
RHBSM
(RHHBSM)
DC – DC
Converter
Int.
ControlPI
Control
if
Vref -
+
if
ifref
- +
+
Fig. 10 Scalar control for RHBSM (RHHBSM) with torque angle
increment compensation
For faster dynamics applications, vector control is used (fig.
11) [11], [14].
Speedcontroller
e er PWM generator
PWM inverter
Vd
Positionand speedestimation
i a ib
Va Vbi a i b
θr
p1/s
a
b
a
er
referencespeed
θ
r *
-
i
id
*
*
qi*
a
i*b
i*c r
measuredor estimated
measured or estimated
encoder
DC – DCConverter
Int.Control
PI
Controlif
ω
ω
θ
i d
id*
RHBSM (RHHBSM)
if
ifref
+ -
Fig. 11 Basic vector control of RHBSM (RHHBSM)
a - with encoder; b – without encoder
B. Torque Vector Control
To simplify the motor control, the direct torque and flux
control (DTFC for induction machines) has been extended to
RHBSM (and to RHHBSM) as torque vector control (TVC).Again, fast flux and torque control may be obtained even in
sensorless drive (fig. 12) [11], [14], [15]:
Speedcontroller Commutation
table V (T)
PWM inverter
Vd
Flux, torqueobserver
and speedobserver
ia ib
Va Vb
r
p
1/s
b
a
referencespeed
r *
-
T
s
*
*
e
r
encoder
i
r ^
Te^
s^
-
-
α
DC – DC
Converter
Int.
ControlPI
Controlif id
id*
RHBSM (RHHBSM)
Ref
transf
Int.
Control
ωω
ω
θ
θλs
λ
λ
if
ifref
- +
Fig. 12 Torque vector control (TVC) of RHBSM (RHHBSM)
a - with encoder; b – without encoder
C. Simulation Results
The voltage source inverter used in simulations was a
Danfoss VLT 3005, 5 KVA one, working at 7 KHz switching
frequency. The RHBSM has the following parameters: PN =
2.5 kW, UN = 400 V, Y, IN = 5.5 A, f N = 50 Hz, p = 3, R s = 2
Ω, Ld = 0.023 H, Lq = 0.017 H, IEN = 6 A.
Further, the simulation results are presented with sensorless
control of RHBSM at different speeds and during transients
(speed step response and speed reversing) using DTC and
SVM control strategies [14].
To eliminate the nonlinear effects produced by the inverter,
the dead time compensation is 2.5 μs.
Steady state performance of RHBSM drive with DTFC
control strategy at 25 rpm is presented in figure 13 (in “a” is
represented estimated torque and in “b” the estimated speed).
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 82
8/7/2019 CSCC-13 rad sa sorinom
http://slidepdf.com/reader/full/cscc-13-rad-sa-sorinom 6/6
For DTFC-SVM control strategy the performance are
presented in figure 14 (a - estimated torque, b - estimated
speed).
The reduction in torque and current ripple by SVM is
obvious.
15
12
9
6
3
0
-3
-6
-9
-12
-15
Estimated torque
[Nm]
0 150 300 450 600 750 900 1050 1200
Time [ms]
0 150 300 450 600 750 900 1050 1200
Time [ms]
75
50
25
0
Estimated speed [rpm]
a) b)
Fig. 13 Direct torque and flux control of RHBSM at 25 rpm steady
state
a) – estimated torque; b) – estimated speed15
12
9
6
3
0
-3
-6
-9
-12
-15
Estimated to
rque [Nm]
0 150 300 450 600 750 900 1050 1200
Time [ms]
0 150 300 450 600 750 900 1050 1200
Time [ms]
75
50
25
0
Estimated speed [rpm]
a) b)
Fig. 14 DTFC-SVM control of RHBSM at 25 rpm steady state
a) – estimated torque; b) – estimated speed
16
12
8
4
0
-4
-8
-12
-16
0 150 300 450 600 750 900 1050 1200
Time [ms]
Estimated torque [Nm]
1000
900
800
700
600
500
400
300
200
100
0
0 150 300 450 600 750 900 1050 1200
Time [ms]
Estimate
d speed [rpm]
a) b)
Fig. 15 Torque and speed transients during no load deceleration
from 900 to 60 rpm with DTFC
a) – estimated torque; b) – estimated speed
Comparative results have been presented in fig. 15 for DTFC
and DTFC - SVM control during transients (reference speed
step from 900 rpm to 60 rpm). A slightly faster torque response
has been obtained with a DTFC control strategy.
VI. CONCLUSION
In this work was obtained an orthogonal and a space-
phasor model for RHBSM and RHHBSM.
Based on this models was develop a control strategy. A
sensorless control scheme that does not require an estimator
for rotor position or flux was presented. With the combined
DTFC-SVM strategy, low torque ripple operation has been
obtained with RHBSM. Further improvement of the rotor
position estimation is necessary in order to obtain very fast
response with this machine.
Further experimental results will be developed.
R EFERENCES
[1] S.I. Deaconu, L.N. Tutelea, G.N. Popa, I. Popa and C. Abrudean,
“Optimizing the Designing of a Reactive Homopolar Synchronous
Machine with Stator Excitation”, IECON 2008, 34th Annual Conference
of the IEEE Industrial Electronics Society, Orlando, Florida, USA, 10-
12 November, 2008, pp. 1311-1318.
[2] S.I. Deaconu, M. Topor, L.N. Tutelea, G.N. Popa and C. Abrudean,
“Mathematical Model of a Reactive Homopolar Synchronous Machine
with Stator Excitation”, EPE-PEMC 2009, Barcelona, Spain, 8-10
September, 2009, pp. 2269-2277.
[3] S.I. Deaconu, M. Topor, L.N. Tutelea, G.N. Popa and C. Abrudean,
“Modeling and Experimental Investigations of a Reactive Homo-
Heteropolar Brushless Synchronous Machine”, IECON 2009, 35th
Annual Conference of the IEEE Industrial Electronics Society, Porto,
Portugal, USA, 3-5 November, 2009, pp. 1209-1216.
[4] M.J. Balchim, and J.F. Eastham, “Characteristics of heteropolar linear
synchronous machine with passive secondary”, Electric Power
Application, vol. 2, no. 8, pp. 213-218, December 1979.
[5] J. He and F. Lin, “A high frequency high power IGBT inverter drive for
45 HP/16.000 RPM brushless homopolar inductor motor”, Conference
Record of the IEEE IAS Annual Meeting , 1995, pp. 9-15.
[6] M. Siegl and V. Kotrba, “Losses and cooling of a high-output power
homopolar alternator, IEEE Fifth International Conference on electrical
Machine and Drives (Conf. Publ. No. 341), London, U.K., 11-13 Sept.
1991, pp. 295-299.
[7] G. P. Rao, J. L. Kirtby, D. C. Meeker Jr. and K. J. Donegan, Hybrid
permanent magnet/homopolar generator and motor , U. S. Patent
6097124, Aug. 1, 2000.
[8] O. Ichikawa, A. Chiba and T. Fukao, “Development of Homo-Polar
Type of Bearingless Motors”, Conference Record of the 1999 IEEE IAS
Annual Meeting , pp. 1223-1228.
[9] M. Hippner and R. G. Harley, “High speed synchronous homopolar and
permanent magnet machines comparative study”, Conference Record of
the IEEE IAS Annual Meeting , 1992, pp. 74-78.
[10] H. Hofman and S. R. Sanders, “High speed synchronous machine with
minimized rotor losses”, IEEE Transactions on Industry Applications,
vol. 36, no. 2, Mar. 2000, pp. 531-539.
[11] P. Tsao, M. Senesky and S. Sanders, “A Synchronous Homopolar Machine for High-Speed Applications”, Conference Record of IEEE IAS
Annual Meeting , 2002, pp. 406-416.
[12] L. Vido, M. Gabsi, M. Lecrivain, Y. Amara and F. Chabot, “Homopolar
and Bipolar Hybrid Excitation Synchronous Machine”, IEEE
Transactions on Energy Conversion, vol. 21, no. 3, September, 2006, pp
1212-1218.
[13] S.I. Deaconu, The study of control brushless electrical generator , PHD
Thesis (in Romanian), Politechnica University of Timisoara, Romania,
1998, unpublished.
[14] I. Boldea and S.A. Nasar, Electric drives, 2nd edition, CRC Press, Taylor
and Francis Group, 2005, pp. 256-375, New York.
[15] A. Kelemen and M. Imecs, Field-Oriented Control of AC Machines (in
Romanian)., Academic Publishing House, pp. 136-240, ISBN 973-27-
0032-7, Bucuresti, 1989, Romania.
Sorin I. Deaconu (M’07) was born in Orastie, Romania, in 1965. He
received the B. S. degree in electrical engineering in 1989 and Ph.D. degree in
electrical machines in 1998 from “Politechnica” University of Timisoara,
Romania.
He is currently Associate Professor at the Department of Electrical
Engineering and Industrial Informatics, Engineering Faculty of Hunedoara,
“Politechnica” University of Timisoara.
He has authored almost 160 international papers in the field of electrical
machines, electrostatics, electric arc furnaces and renewable energy.
Since 1994, he has collaborated with Bee Speed Automation Ltd,
Timisoara, where he is involved in several industry projects regarding
industrial automation, machines and drives.
Advances in Communications, Computers, Systems, Circuits and Devices
ISBN: 978-960-474-250-9 83